Способ и устройство для отслеживания при медицинской процедуре - RU2544807C2
Код документа: RU2544807C2
Чертежи



Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
По настоящей заявке испрашивается приоритет предварительной заявки США № 61/221138, поданной 29 июня 2009 года (Applicant's docket no. PH013137US1), включенной в настоящий документ в качестве ссылки. Родственная заявка представляет собой s/n 61/221150, "Method and System for Position Determination", поданную 29 июня 2009 года (Applicant's docket no. PH013333US1).
Настоящая заявка относится к терапевтической области, в частности к осуществлению отслеживания (прокладыванию пути) при медицинских процедурах, и будет описана в отношении этого варианта.
Для улучшения точности размещения устройств (например, размещения катетера) в организме предложены различные способы и системы, такие как на основе измерений с использованием трехмерных форматов изображения. В этих форматах изображения предпринята попытка расположить устройство ввода относительно области направленного лечения так, как при выявляемой MRI ткани мишени. Эти форматы изображения позволяют получать данные изображения, которые используют для определения оптимального расположения устройства при лечении.
Во многих случаях медицинское устройство доставляют исключительно на основе информации из этих данных изображения, а подтверждение конечного положения относительно мишени может даже потребовать получения второго набора изображений. В некоторых случаях, когда в устройстве для визуального представления траектории устройства используют камеры, остается неясным, соблюдается ли правильная траектория так, как в случае, когда устройство поворачивается при движении.
Бронхоскопия представляет собой способ осмотра внутреннего пространства бронхов. Пациенту в систему дыхательных путей через ротовую полость или ноздри вводят гибкое оптоволоконное устройство, бронхоскоп, специальный вид эндоскопа. Это позволяет пульмонологу рассмотреть внутреннее пространство трахеи, главных бронхов и самых крупных из мелких бронхов. Как правило, бронхоскопы имеют рабочий канал, через который на конце бронхоскопа можно поместить небольшие хирургические устройства.
Очаги повреждения в легких можно выявлять на срезах КТ (компьютерной томографии). Для получения надежного диагноза нужно часто исследовать образцы ткани. Хотя возможно получать образцы ткани иглой снаружи, этому способу присущи определенные трудности. С помощью бронхоскопа эти трудности можно преодолеть. Хирургической техникой получения ткани легкого посредством бронхоскопа является трансбронхиальная эндоскопическая биопсия очагов повреждения в легких. Для получения ткани легкого из задней части стенки бронха применяют небольшой пинцет или биопсийную иглу через рабочий канал.
Эта сущность изобретения предоставлена для соблюдения закона США 37 C.F.R. §1.73, требующего краткого изложения сущности изобретения, указывающего на характер и содержание изобретения. Она предоставлена с пониманием того, что ее не будут использовать для интерпретации или ограничения области или смысла формулы изобретения.
Согласно одному из аспектов иллюстративных вариантов осуществления способ отслеживания при медицинских процедурах может включать получения данных ускорения с акселерометра, который интегрально соединен с медицинским устройством, где данные ускорения поступают в удаленный процессор и где медицинское устройство перемещают по анатомическим образованиям пациента в направлении области-мишени, а определение ориентации медицинского устройства относительно анатомических образований основано на данных об ускорении.
Согласно другому аспекту иллюстративных вариантов осуществления считываемый компьютером носитель данных может содержать хранимый на нем исполнимый на компьютере код, где исполнимый на компьютере код сконфигурирован так, чтобы вычислительное устройство, в которое встроен считываемый компьютером носитель данных: принимало данные ориентации с датчика ориентации, который интегрально соединен с медицинским устройством, где данные ориентации направляют на удаленный процессор и где медицинское устройство перемещают по анатомическим образованиям пациента в направлении области-мишени; определяло ориентацию медицинского устройства относительно анатомических образований на основе данных об ориентации; захватывало изображение анатомических образований в реальном времени с использованием медицинского устройства и предоставляло захваченные изображения и ориентацию медицинского устройства относительно анатомических образований на устройство отображения, функционально соединенное с процессором.
Согласно другому аспекту иллюстративных вариантов осуществления предоставлен эндоскоп, содержащий корпус с дистальным концом и по меньшей мере одним сформированным в нем каналом, где корпус адаптирован для введения через анатомические образования для достижения области-мишени; акселерометр, соединенный с корпусом и расположенный рядом с дистальным концом; устройство передачи изображения, функционально соединенное с корпусом; и источник света, функционально соединенный с корпусом, где акселерометр соединен с удаленным вычислительным устройством для передачи в него данных об ускорении, где устройство передачи изображения соединено с удаленным процессором для передачи в него изображений в реальном времени, и где ориентацию медицинского устройства относительно анатомических образований определяют посредством процессора на основе данных ускорения.
Иллюстративные варианты осуществления, описываемые в настоящем документе, могут обладать рядом преимуществ над существующими в настоящее время системами и способами, включая точность размещения хирургического устройства и уменьшение времени процедуры, обеспечивая более быстрое определение правильной траектории медицинского устройства. Кроме того, систему и способ, описываемые в настоящем документе, можно использовать при модернизации существующих хирургических устройств. Дополнительные достоинства и преимущества будут понятны специалистам в данной области после прочтения и понимания приведенного ниже подробного описания.
Описанные выше и другие характеристики и преимущества настоящего изобретения будут оценены и понятны специалистам в данной области на основе приведенного ниже подробного описания, чертежей и прилагаемой формулы изобретения.
Фиг.1 представляет собой схематическую иллюстрацию системы отслеживания согласно одному из иллюстративных вариантов осуществления для применения при медицинских процедурах.
Фиг.2 представляет собой схематическую иллюстрацию хирургического устройства для применения с системой отслеживания согласно фиг.1.
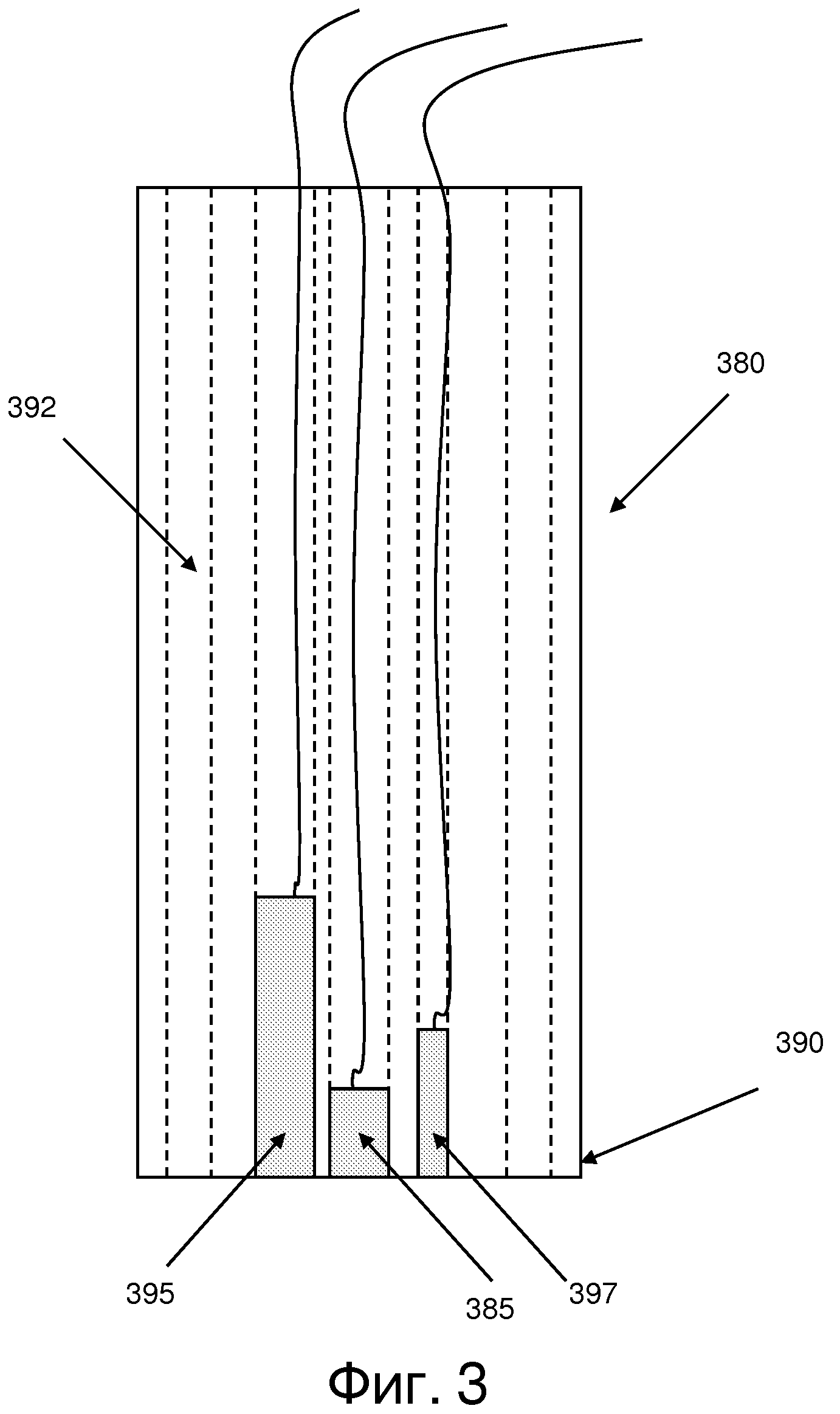
Фиг.3 представляет собой схематическую иллюстрацию другого хирургического устройства для применения с системой отслеживания согласно фиг.1.
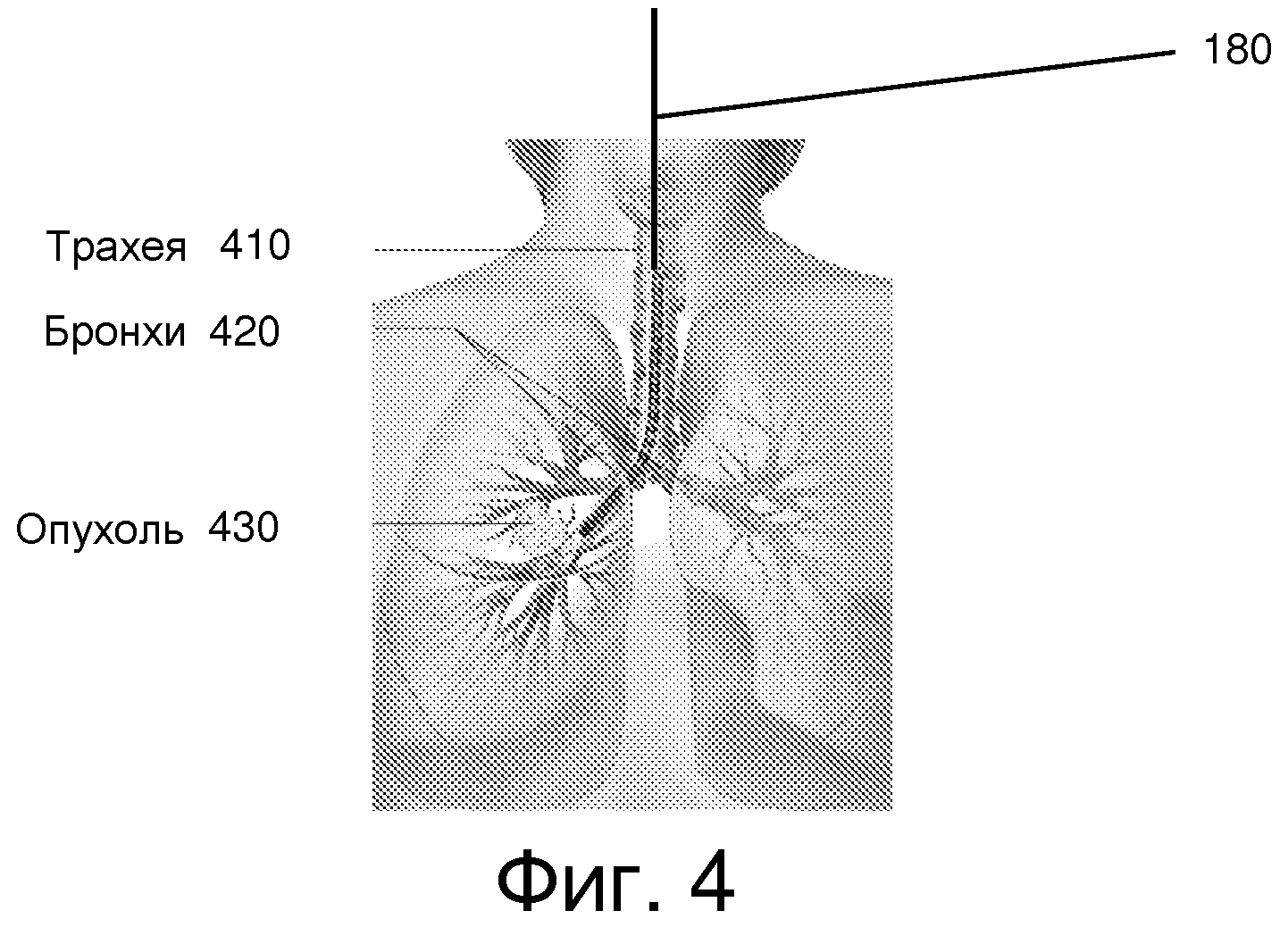
Фиг.4 представляет собой схематическую иллюстрацию пациента с представляющими собой мишень анатомическими образованиями; и
фиг.5 представляет собой изображение бронха пациента, полученное с применением хирургического устройства согласно фиг.2 или 3.
Фиг.6 представляет собой способ, который можно использовать в системе или устройствах на фиг.1-3 для отслеживания при медицинских процедурах; и
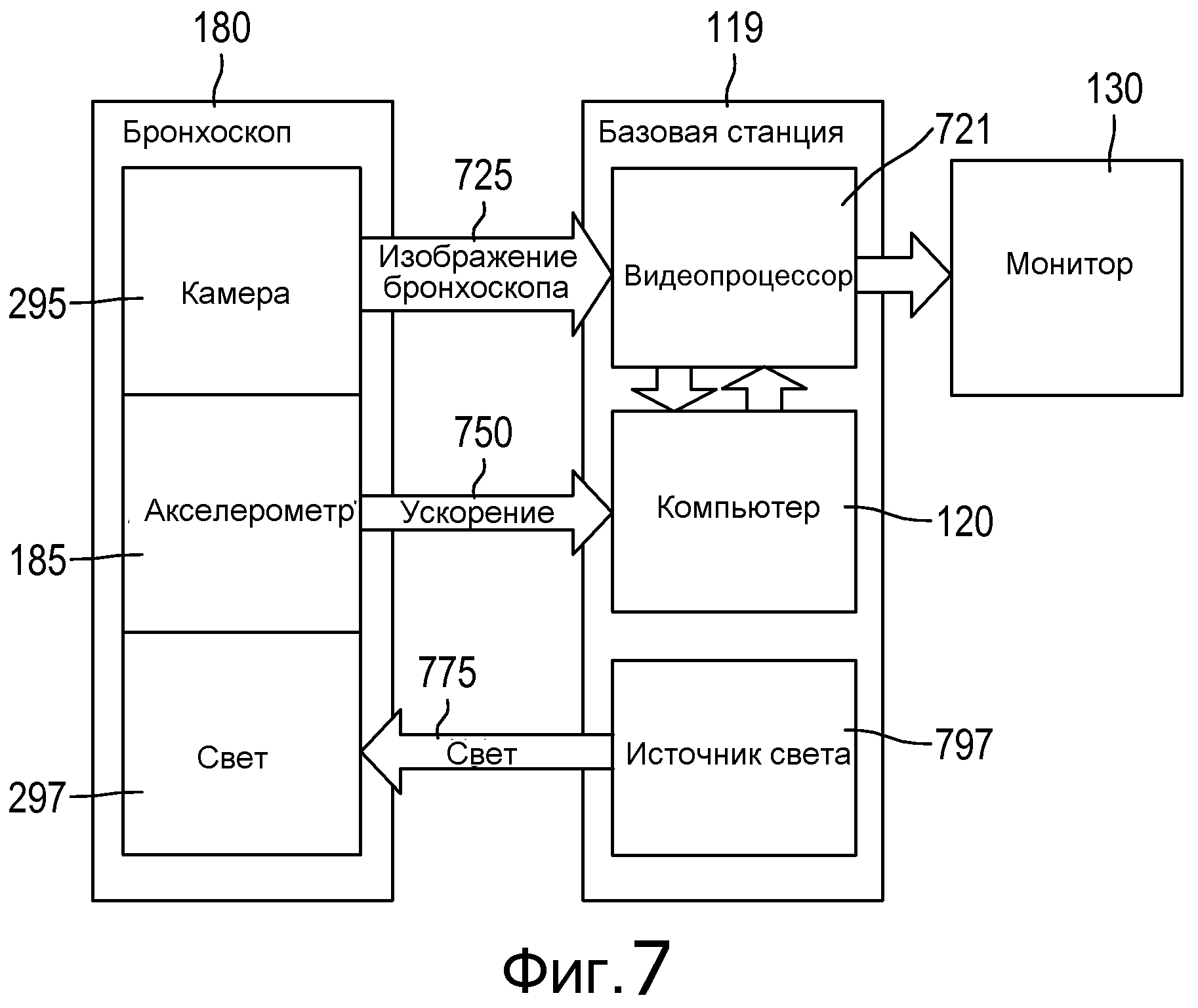
фиг.7 представляет собой схематическую иллюстрацию потока сигналов между хирургическим устройством и рабочей станцией.
Иллюстративные варианты осуществления настоящего изобретения описаны в отношении системы отслеживания для бронхоскопа для использования при процедуре для человека. Специалисту в данной области следует понимать, что иллюстративные варианты осуществления настоящего изобретения можно применять и использовать с различными типами медицинских или хирургических устройств (включая другие эндоскопы или катетеры), при различных типах процедур и в различных отделах организма человека или животного. Иллюстративные варианты осуществления также можно использовать для отслеживания хирургического устройства, в котором в комбинации с камерой или вместо нее использованы другие виды получения изображения, такие как ультразвуковое изображение с ультразвукового устройства, расположенного в хирургическом устройстве, вводимом в организм. Иллюстративные варианты осуществления описаны в настоящем документе как варианты, в которых применяют отслеживание посредством акселерометра в комбинации с получением изображения. Применение способа и системы согласно иллюстративным вариантам осуществления настоящего изобретения можно адаптировать для применения к другим типам отслеживания в представляющих мишень анатомических образованиях, и в них можно использовать другие типы определяющих ориентацию датчиков, включая магнитометры.
На фиг.1 представлена система 100 отслеживания, которая может содержать хирургическое устройство 180, такое как бронхоскоп, с присоединенным к нему акселерометром 185. Акселерометр 185 можно размещать параллельно или рядом с наконечником или дистальным концом хирургического устройства 180. Хотя в иллюстративном варианте осуществления представлен один акселерометр 185, согласно настоящему изобретению предусмотрено использование любого количества акселерометров, которые могут находиться в различных конфигурациях около хирургического устройства 180. Хирургическое устройство 180 можно использовать в анатомических образованиях 105 пациента, который может находиться на опорной структуре 170.
Акселерометр 185 может представлять собой измерительное устройство, способное определять ускорение наконечника хирургического устройства 180 так, чтобы существовала возможность генерировать информацию об ориентации относительно текущей ориентации наконечника. Акселерометр 185 может представлять собой акселерометр различных типов, включая пьезоэлектрический MEMS, термальный (субмикронная технология CMOS), объемный микроемкостной, объемный микропьезорезистивный, емкостной на основании пружинного подвеса, с электромеханическим сервоприводом, компенсационный, тензометрический, резонансный, магнитно-индуктивный, оптический, на основе поверхностных звуковых волн, с ответом DC, с модально регулируемым ударным воздействием, подушки сидения, PIGA и т.д. В одном из вариантов осуществления можно использовать 3-мерные акселерометры, измеряющие не только величину ускорения, но также и его направление.
Акселерометр 185 можно функционально соединять с процессором 120, получающим данные о его ориентации. Оперативное соединение можно устанавливать посредством провода, такой как линия 186, и/или оно может представлять собой беспроводное соединение между акселерометром 185 и процессором 120. В одном из вариантов осуществления данные об ориентации могут представлять собой необработанные данные, такие как изменение напряжения, которое измеряют и передают в процессор 120. В другом варианте осуществления акселерометр 185 перед передачей данных об ориентации в процессоре 120 может преобразовывать необработанные данные для передачи информации.
Система 100 обозначает данные об ориентации, непосредственно передаваемые в процессор 120. Однако согласно настоящему изобретению предусмотрен акселерометр 185, передающий данные об ориентации в блок сбора данных об ориентации (не показан), который может обрабатывать данные, а затем передавать их в процессор 120.
В одном из вариантов осуществления систему 100 отслеживания можно использовать совместно с устройством 150 получения изображения, таким как устройство получения изображения с высоким разрешением, включая рентгеновский сканнер 155, или она может содержать его. Например, изображение представляющих мишень анатомических образований 105 с высоким разрешением можно получать посредством сканера 155 и хранить в памяти для хранения изображений. Память изображений можно встраивать в процессор 120, и/или она может представлять собой отдельное хранилище и/или обрабатывающее устройство. Рентгеновское сканирующее устройство 155 с рамой С-типа представлено на фиг.1 с иллюстративными целями, согласно настоящему изобретению предусмотрено использование различных устройств передачи изображения, включая открытые MRI, CT и т.д. Согласно настоящему изобретению предусмотрено применение различных устройств получения изображения, отдельно или в комбинации, включая MRI, ультразвук, рентгеновское излучение, CT и т.д. Согласно настоящему изобретению также предусмотрено устройство 150 получения изображения, являющееся отдельной системой, основанной на получении изображений, включая изображения до манипуляции и/или после манипуляции.
Кроме того, представленное на фиг.2 хирургическое устройство 180 может содержать один или несколько каналов 292, полученных в корпусе 281 устройства (например, бронхоскопа), такие как рабочие каналы для предоставления клиницистам доступа к представляющим мишень анатомическим образованиям и вытяжные каналы. Корпус 281 можно получать из различных эластичных материалов. Устройство 180 может содержать акселерометр 185, размещенный параллельно или рядом с наконечником 290 устройства, включая встроенный в стенку устройства или присоединенный снаружи устройства. Устройство 180 также может содержать камеру или устройство 295 формирования изображения и источник 297 света. Источник 297 света может содержать встроенный источник энергии, и/или его можно соединять с внешним источником энергии, например, посредством использования линии 186 (на фиг.1). В одном из вариантов осуществления источник 297 света можно функционально соединять с процессором 120 для регулировки уровня излучаемого света или другого вида управления, применяемого к источнику света. В другом варианте осуществления на наконечник хирургического устройства 180 можно подавать свет посредством оптоволокна, идущего из внешнего источника света.
Камеру 295 можно функционально соединять с вычислительным устройством 120, получающим с нее данные изображения. Функциональное соединение можно устанавливать посредством провода, такого как линия 186, и/или оно может представлять собой беспроводное соединение между камерой 295 и процессором 120. В одном из вариантов осуществления данные изображения могут представлять собой необработанные данные, получаемые камерой 295 и передаваемые непосредственно в процессор 120. В другом варианте осуществления камера 295 до передачи изображения в процессор 120 может преобразовывать необработанные данные в видеоинформацию. Процессор 120 может предоставлять данные изображения в качестве видеоизображения в реальном времени так, что клиницист может видеть траекторию, по которой перемещается хирургическое устройство 180.
Представленное на фиг.4 и 5 хирургическое устройство 180 можно перемещать вниз по трахее 410 и по бронхам 420 с достижением области опухоли или другой области-мишени или области 430. Как представлено на фиг.5, разветвленная структура бронхов требует выбора клиницистом различных траекторий, по которым в ходе процедуры перемещают хирургическое устройство 180.
Когда хирургическое устройство 180 не перемещается, акселерометр 185 измеряет только ускорение свободного падения. На основе этих измерений процессор 120 может определять направленность наконечника 290 устройства 180 и соотносить его с изображением устройства (например, срезом КТ), полученным посредством устройства 150 получения изображения. Так как известно, как в ходе процедуры, такой как бронхоскопия, располагается пациент, можно соотнести изображение при бронхоскопии со срезом КТ. В данном участке бифуркации с использованием данных об ускорении можно определять, в какую из ветвей производить перемещение для достижения мишени.
В одном из вариантов осуществления бифуркации, видимые на изображении бронхоскопии, можно определять автоматически посредством обработки изображения, производимой процессором 120. Кроме того, можно определять, движется ли бронхоскоп 180 в бронхи или из них. Совместно с информацией от акселерометра 185 эту комбинированную информацию можно использовать для определения положения бронхоскопа в бронхиальном дереве. Комбинация информации из акселерометра 185 и из анализа изображения, производимая процессором 120, облегчает перемещение по представляющим мишень анатомическим образованиям.
В другом варианте осуществления для указания ориентации бронхоскопа по отношению к представляющим мишень анатомическим образованиям можно показывать индикатор бифуркаций. Например, можно показывать стрелку или т.п., указывающее на то, какое направление относительно вертикальной проекции представляет собой направление вверх, а какое направление представляет собой направление вниз. В другом варианте осуществления на основе среза КТ можно предоставлять полученный на компьютере вид из положения и с ориентацией реального бронхоскопа, так называемую "виртуальную бронхоскопию". Этот вид можно демонстрировать одновременно с реальным изображением для учета ориентации пользователя. В другом варианте осуществления после определения бифуркации на видеоизображении посредством анализа изображения можно отметить планируемую траекторию, например, посредством перекрестья.
Кроме того, на фиг.3 предоставлено другое хирургическое устройство 380 (например, бронхоскоп). Устройство 380 может содержать дополнительные каналы 392, позволяющие размещать на наконечнике 390 устройства или рядом с ним один или несколько акселерометров 385, камеру 395 и источник света 397. Эти компоненты можно функционально соединять с вычислительным устройством 120 с использованием проводного и/или беспроводного соединения. После достижения устройством 380 его цели один или несколько из этих компонентов можно удалять через каналы 392. Например, акселерометр 385 можно вынимать через канал 392 и помещать в нем при перемещении устройства 380. В одном из вариантов осуществления с одним или несколькими компонентами устройства 180 можно использовать существующие бронхоскопы. Например, акселерометр можно помещать в существующий рабочий канал или прикреплять к наконечнику бронхоскопа с внешней стороны. В другом варианте осуществления оптическую систему и световые компоненты можно закреплять в хирургическом устройстве 180. После достижения области-мишени акселерометр 385 можно вынимать обратно через канал 392 так, что канал можно использовать для других целей, таких как в качестве вытяжного канала или рабочего канала. В этом варианте осуществления, таким образом, в устройстве 180 можно формировать меньше каналов.
На фиг.6 представлен способ 600 отслеживания хирургического устройства, такого как бронхоскоп. На этапе 602 получают изображение (например, изображение КТ) области-мишени, такой как бронхи. Изображение может представлять собой изображение до манипуляции и/или после манипуляции. На этапе 604 бронхоскоп можно перемещать по бронхам, при этом клиницист наблюдает полученное в реальном времени видео с камеры, расположенной в бронхоскопе. На этапе 606 определяют, достигнута ли мишень. На этапе 608 клиницист может на пути достичь бифуркации. Правильную траекторию для продолжения перемещения можно определять с использованием данных ориентации, получаемых с акселерометра на этапе 610. Эти этапы можно повторять до достижения мишени на этапе 612. Изображение можно настраивать так, чтобы в нем отображалось положение бронхоскопа и/или ориентация бронхоскопа, например, с использованием данных ускорения.
Система 100 обеспечивает передачу данных акселерометра 185 в процессор 120. В одном из вариантов осуществления эти данные можно передавать по оптоволоконному кабелю, который используют для оптической камеры, функционально соединенной с бронхоскопом. Процессор 120 может получать для анализа данные об ориентации с акселерометра, а также изображение с бронхоскопа из видеопроцессора. Процессор 120 может проводить анализ и следить за тем, какая бифуркация бронхиального дерева видна в настоящее время. В одном из вариантов осуществления процессор 120 также можно соединять с локальной сетью для получения среза КТ перед манипуляцией и соответствующих данных по планированию траектории. Информацию о направлении, вычисленную процессором 120, можно передавать на видеопроцессор, где ее комбинируют с исходными данными изображения с бронхоскопа, а затем представляют на мониторе 130.
Кроме того, на фиг.7 изображен поток информации между устройством 180 и рабочей или базовой станцией 119. Поток информации может содержать данные ускорения 750 с акселерометра 180 в процессор 120; изображение с бронхоскопа (например, видео в реальном времени) 725 с камеры 295 в видеопроцессор 721; и свет 775 из источника света 797 в световое устройство 297 (соединенное с бронхоскопом).
В одном из вариантов осуществления изображение с бронхоскопа, представляемое на дисплее 130, можно автоматически вращать для отображения направления вперед на основе данных об ориентации с акселерометра. В другом варианте осуществления можно использовать способы обработки изображения для определения того, перемещается ли бронхоскоп в бронхи или из них. В еще одном варианте осуществления для получения данных об ориентации можно использовать другие типы датчиков ориентации. Например, можно использовать магнитометр для определения направления, соответствующего наконечнику бронхоскопа и разветвляющихся путей на основе применения внешнего магнитного поля, включая магнитное поле Земли и/или искусственное поле. Систему 100 можно использовать для бронхоскопического перемещения, особенно при трансбронхиальной биопсии легкого. Систему 100 также можно использовать в других приложениях, таких как колоноскопия.
В одном из вариантов осуществления можно проводить калибровку направления (итерационную настройку положения принимаемого пациента), при этом перемещение бронхоскопа начинают, полагая известным положение и ориентацию пациента в пространстве. Таким образом, набор данных КТ перед манипуляциями ориентируют в соответствии с направлением, измеряемым акселерометром. В первой бифуркации направления в двух разветвленных бронхах определяют с помощью анализа изображения. Эти направления сравнивают с ожидаемым направлением на основе измерения акселерометра и вычисляют предполагаемую ориентацию и отклонение в ориентации пациента в пространстве. Предполагаемую ориентацию пациента в пространстве корректируют по этому направлению и для следующей бифуркации используют лучшее предположение ориентации пациента в пространстве. Эту процедуру можно повторять при достижении следующей бифуркации.
Перед бронхоскопией можно получать КТ легкого до манипуляций. Эту КТ можно анализировать следующим образом: на изображении КТ можно определять положение представляющего интерес очага повреждения, например, узла или опухоли в легких. Это проводят вручную, щелчком в правильном срезе в правильном положении. Бронхиальное дерево можно выделить (сегментировать) из изображения КТ с помощью подходящих способов обработки изображения. Можно спланировать траекторию от трахеи в бронхиальное дерево к очагу повреждения. Это можно проводить вручную, но также возможны автоматические способы. Можно определять бифуркации по ходу. При этом этапе планирования предоставляется достаточно информации, доступной для руководства при манипуляциях, как описано в комментариях выше.
Когда бронхи и таким образом также наконечник бронхоскопа направлены прямо вниз или прямо вверх, информация о направлении с акселерометра может отсутствовать. В таком случае это помогает расположить пациента таким образом, чтобы наконечник бронхоскопа указывал в направлении с горизонтальной составляющей. Альтернативно, акселерометр можно дополнять магнитометром, который определяет направление магнитного поля. Оно не коллинеарно гравитационному полю за исключением магнитных полюсов.
Изобретение, включая этапы способов, описанных выше, можно осуществлять в качестве аппаратного обеспечения, программного обеспечения или комбинации аппаратного обеспечения и программного обеспечения. Изобретение можно осуществлять централизованным образом в одной компьютерной системе или распределенным способом, когда различные элементы распределены по нескольким взаимосвязанным компьютерным системам. Подходящей является компьютерная система любого вида или другое устройство, адаптированное для проведения способов, описываемых в настоящем документе. Типичной комбинацией аппаратного обеспечения и программного обеспечения может являться компьютерная система общего назначения с компьютерной программой, которая при загрузке и выполнении управляет компьютерной системой так, что происходит выполнение способов, описываемых в настоящем документе.
Изобретение, включая этапы способов, описанных выше, можно внедрять в компьютерный программный продукт. Компьютерный программный продукт может содержать считываемый компьютером носитель данных, на котором записана компьютерная программа, содержащая исполнимый на компьютере код для управления вычислительным устройством или основанной на компьютерах системе для осуществления различных процедур, процессов и способов, описываемых в настоящем документе. Компьютерная программа в настоящем контексте означает любое выражение, на любом языке, код или представление набора инструкций, предназначенных для того, чтобы обусловить исполнение системой со способностью обработки информации конкретной функции, непосредственно или после одного или обоих из следующего: a) преобразование в другой язык, код или представление; b) воспроизводство в другой материальной форме.
Иллюстрации вариантов осуществления, описываемых в настоящем документе, предназначены для предоставления общего понимания структуры различных вариантов осуществления, и они не предназначены для того, чтобы служить в качестве полного описания всех элементов и свойств устройства и систем, которые могут использовать структуры, описываемые в настоящем документе. Специалистам в данной области при изучении приведенного выше описания будет очевидно множество других вариантов осуществления. На основе его можно использовать и получать другие варианты осуществления так, что можно делать структурные и логические замены и изменения без отклонения от объема настоящего изобретения. Фигуры также приведены только для иллюстрации, и они могут не быть нарисованы в масштабе. Определенные их части могут быть увеличены, тогда как другие уменьшены. Соответственно, описание и чертежи следует рассматривать в иллюстративном, а не в ограничительном смысле.
Таким образом, хотя в настоящем документе проиллюстрированы и описаны конкретные варианты осуществления, следует понимать, что конкретные представленные варианты осуществления можно заменять любыми устройствами, для которых рассчитано, что они позволяют достичь той же цели. Предусмотрено, что настоящее изобретение включает любые и все адаптации и вариации различных вариантов осуществления. Специалистам в данной области при изучении приведенного выше описания будут очевидны комбинации приведенных выше вариантов осуществления и другие варианты осуществления, конкретно не описываемые в настоящем документе. Таким образом, следует понимать, что изобретение не ограничено конкретным вариантом(ами) осуществления, описанным в качестве лучшего варианта, предусмотренного для осуществления настоящего изобретения, но что изобретение включает любые варианты осуществления, находящиеся в объеме прилагаемой формулы изобретения.
Реферат изобретения предоставлен для соблюдения закона США 37 C.F.R. §1.72(b), требующего приведения реферата, который позволил бы читателю быстро определить сущность технического описания. Он предоставлен с пониманием того, что его не будут использовать для интерпретации или ограничения области или смысла формулы изобретения.
Реферат
Изобретение относится к осуществлению отслеживания при медицинских процедурах. Техническим результатом является повышение точности размещения хирургического устройства и уменьшение времени процедуры. Способ содержит этапы, на которых: принимают данные ориентации с датчика ориентации, который интегрально соединен с медицинским устройством, при этом данные ориентации принимают на удаленный процессор, при этом медицинское устройство перемещают по анатомическим образованиям пациента в направлении области мишени; определяют ориентацию медицинского устройства относительно анатомических образований на основе данных ориентации; захватывают изображения анатомических образований в реальном времени с использованием медицинского устройства, и предоставляют захваченные изображения и ориентацию медицинского устройства относительно анатомических образований на устройство отображения, оперативно соединенное с упомянутым процессором. 2 н. и 13 з.п. ф-лы, 7 ил.
Формула
принимают данные (750) ориентации с датчика (185) ориентации, который интегрально соединен с медицинским устройством (180), при этом данные ориентации принимают на удаленный процессор (120), при этом медицинское устройство перемещают по анатомическим образованиям (105) пациента в направлении области (430) мишени;
определяют ориентацию медицинского устройства относительно анатомических образований на основе данных ориентации;
захватывают изображения анатомических образований в реальном времени с использованием медицинского устройства, и
предоставляют захваченные изображения и ориентацию медицинского устройства относительно анатомических образований на устройство (130) отображения, оперативно соединенное с упомянутым процессором.
получения изображения анатомических образований; калибровки ориентации с применением изображения;
определения направлений в разветвленных бронхах в первой бифуркации анатомических образований с применением изображения; и
сравнения определенных направлений с ожидаемым направлением на основе определенной ориентации.
получения изображения анатомических образований;
определения области мишени на изображении посредством выбора соответствующего среза изображения;
сегментирования части изображения с применением обработки изображения, и
планирования траектории от трахеи в бронхиальное дерево к области-мишени.
компьютер (120), и
эндоскоп, содержащий
корпус (281) с дистальным концом (290) и по меньшей мере одним сформированным в нем каналом (292), при этом корпус адаптирован для введения в анатомические образования (105) с достижением области (430) мишени;
акселерометр (185), соединенный с корпусом и расположенный рядом с дистальным концом;
устройство (295) формирования изображения, оперативно соединенное с корпусом; и
источник (297) света, оперативно соединенный с корпусом,
при этом акселерометр находится в связи с компьютером (120) для передачи ему данных об ускорении, при этом устройство формирования изображения находится в связи с компьютером (120) для передачи ему изображений в реальном времени, и при этом ориентацию медицинского устройства относительно анатомических образований определяют посредством компьютера (120) на основе данных ускорения и изображений в реальном времени.
Комментарии