Датчик тока - RU2690710C2
Код документа: RU2690710C2
Чертежи




Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] В настоящем описании раскрыт датчик тока, содержащий сердечник для улавливания магнитного поля и магнитоэлектрический преобразователь.
2. Описание предшествующего уровня техники
[0002] Известен датчик тока, включающий в себя сердечник для улавливания магнитного поля и магнитоэлектрический преобразователь. Сердечник для улавливания магнитного поля имеет форму кольца, окружающего проводник, через который протекает ток. Сердечник для улавливания магнитного поля имеет зазор, сформированный за счет разделения кольца в одном месте. Магнитоэлектрический преобразователь встроен в чип датчика, а чип датчика расположен в зазоре сердечника для улавливания магнитного поля. Чип датчика размещен таким образом, что направление магнитной индукции магнитоэлектрического преобразователя внутри чипа датчика проходит в направлении, перпендикулярном относительно торцевых поверхностей сердечника для улавливания магнитного поля, обращенных к зазору. Сердечник для улавливания магнитного поля улавливает поток магнитной индукции, вызванный током, протекающим через проводник. Магнитоэлектрический преобразователь измеряет поток магнитной индукции, проходящий через зазор сердечника для улавливания магнитного поля. Чип датчика подключен к контроллеру датчика, который определяет ток, протекающий через проводник, в зависимости от уровня потока магнитной индукции, измеренного магнитоэлектрическим преобразователем.
[0003] В публикации японской патентной заявки №2013-13169 раскрыт датчик тока, в котором два чипа датчика одного типа размещены в зазоре сердечника для улавливания магнитного поля. Чипы датчика выровнены вдоль направления пролегания проводника. Контроллер датчика выводит сигнал ошибки, указывающий на то, что в одном из чипов датчика возникло отклонение, когда разность выходных сигналов между двумя чипами датчиков одного типа (двумя магнитоэлектрическими преобразователями) превышает заранее заданное пороговое значение (пороговое значение выявления ошибки).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Когда два чипа датчика размещены в зазоре, эти два чипа датчиков находятся в соответствующих двухсторонне симметричных (или вертикально-симметричных) положениях с противоположных сторон от центра торцевой поверхности сердечника для улавливания магнитного поля, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля, и обращены в соответствующий зазор. Каждый из двух чипов датчика расположен в одинаковом положении. Когда сердечник для улавливания магнитного поля имеет торцевую поверхность с достаточно большой площадью, два чипа датчика располагаются в однородном магнитном поле. Когда оба чипа датчиков являются стандартными, каждый из чипов датчика выдает одинаковый результат измерения.
[0005] При этом, магнитоэлектрический преобразователь может быть размещен в положении, отклоненном от центра чипа датчика, в любом из направлений из-за производственных или конструктивных особенностей чипа датчика. Например, если на два чипа датчика, находящихся в одинаковых положениях в соответствующих двухсторонне симметричных положениях с противоположных сторон от центра торцевой поверхности сердечника для улавливания магнитного поля, смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля, магнитоэлектрический преобразователь размещен в чипах справа. При этом магнитоэлектрический преобразователь в чипе датчика с левой стороны от центра торцевой поверхности расположен ближе к центру торцевой поверхности, чем магнитоэлектрический преобразователь в чипе датчика с правой стороны. То есть, даже если чипы датчика находятся в соответствующих симметричных положениях от центра торцевой поверхности, каждый из магнитоэлектрических преобразователей в обоих чипах датчика имеет различное расстояние от центра торцевой поверхности. Существует допустимый случай, когда сердечник для улавливания магнитного поля имеет торцевую поверхность с большой площадью, и оба чипа датчика полностью находятся в однородном магнитном поле. К сожалению, когда площадь торцевой поверхности сердечника для улавливания магнитного поля уменьшается, чтобы уменьшить датчик в размере, однородный диапазон магнитного поля в зазоре уменьшается. В результате небольшое различие в расстоянии между каждым из двух магнитоэлектрических преобразователей и центром концевой поверхности сердечника для улавливания магнитного поля вызывает разность в магнитном поле, приложенном к каждому из двух магнитоэлектрических преобразователей, что вызывает разность выходных сигналов (выходных сигналов чипов датчика) двух магнитоэлектрических преобразователей. Изобретение в соответствии с настоящим описанием обеспечивает способ уменьшения разности выходных сигналов двух чипов датчика, вызванных смещением магнитоэлектрического преобразователя в чипе датчика от центра чипа.
[0006] Иллюстративный объект настоящего изобретения включает в себя датчик тока для измерения тока, протекающего через проводник. Датчик тока содержит сердечник для улавливания магнитного поля, имеющий кольцеобразную форму кольца, окружающего проводник, причем кольцо имеет зазор на части кольцеобразной формы; а также два чипа датчика, содержащие соответствующие магнитоэлектрические преобразователи, при этом эти два чипа датчика размещены в указанном зазоре, притом эти два чипа датчика размещены таким образом, что направление магнитной индукции относительно каждого из этих двух чипов датчика совпадает с перпендикулярным направлением к торцевым поверхностям сердечника для улавливания магнитного поля, при этом торцевые поверхности обращены в указанный зазор, и два чипа датчика расположены центрально симметрично по отношению к центру зазора, если смотреть с упомянутого перпендикулярного направления. В качестве иллюстративного объекта настоящее изобретение содержит датчик тока для измерения тока, протекающего через проводник. Датчик тока содержит сердечник для улавливания магнитного поля, имеющий кольцеобразную форму кольца, окружающего проводник, причем кольцо имеет зазор на части кольца в одном месте с образованием зазора; а также два чипа датчика, содержащих соответствующие магнитоэлектрические преобразователи, при этом указанные два чипа датчика размещены в указанном зазоре, притом эти два чипа датчика размещены таким образом, что направление магнитной индукции относительно каждого из двух чипов датчика совпадает с перпендикулярным направлением к торцевым поверхностям сердечника для улавливания магнитного поля, при этом торцевые поверхности обращены в указанный зазор, и два чипа датчика расположены осесимметрично относительно прямой линии, проходящей через центр зазора.
[0007] Например, предполагается, что два чипа датчика расположены в поперечном направлении торцевой поверхности симметрично относительно оси, так что правая боковая поверхность каждого из чипов датчика расположена вблизи центра торцевой поверхности, а их левая боковая поверхность расположена в удалении от центра торцевой поверхности. При этом предполагается, что магнитоэлектрический преобразователь расположен в чипе датчика справа от центра. В этом случае, согласно размещению, каждый из магнитоэлектрических преобразователей двух соответствующих чипов датчика расположен ближе к центру торцевой поверхности, чем к центру каждого из чипов. Каждый из магнитоэлектрических преобразователей двух соответствующих чипов датчика находится в положении, равноудаленном от центра торцевой поверхности, если смотреть с перпендикулярного направления торцевых поверхностей. Таким образом, каждый из двух магнитоэлектрических преобразователей располагается в одинаковом магнитном поле, так что разность выходных сигналов между двумя магнитоэлектрическими преобразователями (чипами датчика) не увеличивается.
[0008] Описание «две чипа датчика, располагают осесимметрично относительно прямой линии, проходящей через центр зазора», может быть описано в других словах следующим образом. То есть, два чипа датчика размещены таким образом, что серединный перпендикуляр в центре чипа датчика проходит через центр торцевой поверхности, и это положение каждого из двух чипов датчика зеркально симметрично этому серединному перпендикуляру, если смотреть с перпендикулярного направления торцевых поверхностей.
[0009] Предпочтительно, чтобы датчик тока, раскрытый в настоящем описании, мог дополнительно содержать контроллер датчика. Контроллер датчика может быть выполнен с возможностью вывода сигнала ошибки (сигнала, указывающего на отклонение, которое появляется, по меньшей мере, в одном из чипов датчика), когда разность выходных сигналов между двумя магнитоэлектрическими преобразователями превышает заранее заданное пороговое значение. Датчик тока, описанный выше, имеет небольшую разность выходных сигналов между двумя чипами датчиков в обычное время, так что заранее заданное пороговое значение может быть уменьшено для повышения точности обнаружения отклонений.
[0010] Упомянутые два чипа датчика могут быть размещены таким образом, что, когда два чипа датчиков выводят положительные значения для магнитного потока, проходящего через зазор соответственно, направление магнитной индукции относительно одного из этих двух чипов датчика противоположно направлению магнитной индукции относительно другого из этих двух чипов датчика. В этом случае выходные сигналы двух соответствующих чипов датчика противоположны друг другу для положительных и отрицательных значений. Таким образом, только простое сложение выходных сигналов двух чипов датчика позволяет получить разность выходных сигналов между двумя чипами датчиков (разность абсолютной величины выходного значения). При этом контроллер датчика имеет простую схему.
[0011] Детали и модификации технологии, раскрытые в настоящем описании, будут описаны далее в «ПОДРОБНОМ ОПИСАНИИ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ».
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Признаки, преимущества, а также техническая и промышленная значимость примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и где:
Фиг. 1 представляет собой принципиальную схему электрической системы электромобиля с использованием датчика тока согласно примеру;
Фиг. 2А представляет собой вид спереди блока датчика тока;
Фиг. 2B представляет собой вид сверху блока датчика тока;
Фиг. 3А представляет собой увеличенный вид сверху границы зазора;
Фиг. 3B иллюстрирует расположение чипов датчика, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля;
Фиг. 4 иллюстрирует взаимосвязь между магнитным полем и чипами датчика в зазоре;
Фиг. 5 представляет собой график, показывающий выходные сигналы двух чипов датчика в соответствии с силой магнитного поля;
Фиг. 6А представляет собой увеличенный вид сверху границы зазора;
Фиг. 6B иллюстрирует расположение чипов датчика, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля;
Фиг. 7 иллюстрирует еще один пример расположения двух чипов датчика (увеличенный вид сверху границы зазора); и
Фиг. 8 иллюстрирует еще один пример размещения двух чипов датчика (иллюстрация, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля).
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
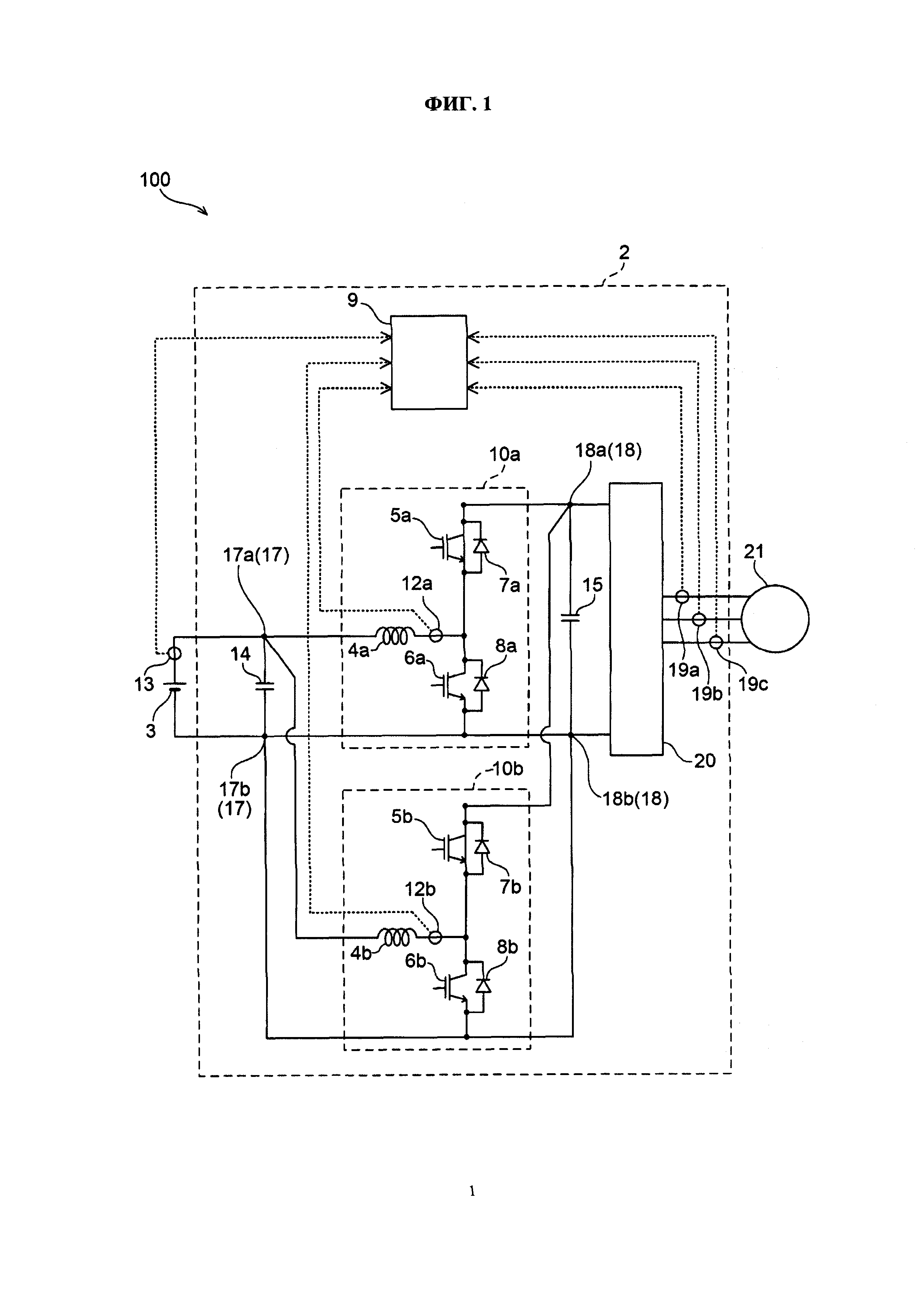
[0013] Со ссылкой на чертежи будет описан датчик тока согласно примеру. Сначала будет описано электрическое транспортное средство с использованием датчика тока согласно примеру. На фиг. 1 показана принципиальная схема системы электропитания электрического транспортного средства 100. Электрическое транспортное средство 100 перемещается при приведении в действие электродвигателя 21 за счет электрической энергии аккумулятора 3. Контроллер 2 электропитания преобразует постоянный ток в переменный ток после повышения напряжения постоянного тока аккумулятора 3, и подает переменный ток на электродвигатель 21. Когда водитель нажимает на тормоз, электродвигатель 21 генерирует энергию, используя энергию торможения транспортного средства. Энергия переменного тока, полученная в результате выработки электроэнергии, преобразуется в постоянный ток контроллером 2 электропитания и дополнительно понижает напряжение, которое должно использоваться для зарядки аккумулятора 3. Аккумулятор 3 содержит датчик 13 тока.
[0014] Контроллер 2 электропитания включает в себя пару преобразователей 10а, 10b напряжения, инвертор 20 и два конденсатора (фильтрующий конденсатор 14 и сглаживающий конденсатор 15). Пара преобразователей 10а, 10b напряжения присоединены параллельно друг другу между выводом 17 низкого напряжения и выводом 18 высокого напряжения.
[0015] Каждый преобразователь 10а, 10b напряжения имеет назначение повышения напряжения для повышения напряжения аккумулятора 3, подаваемого на вывод 17 низкого напряжения, и выдачу напряжения от вывода 18 высокого напряжения, а также назначение понижения напряжения для понижения напряжения электрической энергии от инвертора 20, подаваемого на вывод 18 высокого напряжения, и выдачу напряжения на вывод 17 низкого напряжения. То есть, каждый преобразователь 10а, 10b напряжения является двухсторонним преобразователем постоянного тока. Электрическая энергия от инвертора 20 представляет собой электрическую энергию постоянного тока, которую получают путем преобразования инвертором 20 электрической энергии переменного тока, генерируемой электродвигателем 21.
[0016] Первый преобразователь 10а напряжения содержит два транзистора 5а, 6а, два диода 7а, 8а, реактивную катушку 4а, и датчик 12а тока. Два транзистора 5а, 6а последовательно соединены друг с другом. Последовательное соединение двух транзисторов 5а, 6а выполнено между катодом 18а и анодом 18b вывода 18 высокого напряжения. Два диода 7а, 8а соединены, соответственно, с транзисторами 5а, 6а встречно-параллельно. Реактивная катушка 4а соединена одним своим концом с серединной точкой при последовательном соединении двух транзисторов 5а, 6а. Реактивная катушка 4а соединена другим концом с катодом 17а вывода 17 низкого напряжения. Фильтрующий конденсатор 14 подсоединен между катодом 17а и анодом 17b вывода 17 низкого напряжения. Анод 17b вывода 17 низкого напряжения напрямую соединен с анодом 18b вывода 18 высокого напряжения. Транзистор 5а и диод 8а в основном участвуют в процессе понижения напряжения, а транзистор 6а и диод 7а в основном участвуют в процессе повышения напряжения. Конфигурация схемы и работа преобразователя 10а напряжения на фиг. 1 хорошо известны, так что подробное описание опущено. Датчик тока 12а измеряет ток, протекающий через реактивную катушку 4а.
[0017] Второй преобразователь 10b напряжения содержит два транзистора 5b, 6b, два диода 7b, 8b, реактивную катушку 4b, и датчик 12b тока. Второй преобразователь 10b напряжения имеет такую же структуру и назначение, что и первый преобразователь 10а напряжения, так что описание второго преобразователя 10b напряжения опущено. Контроллер 2 электропитания включает в себя пару преобразователей 10а, 10b напряжения одного и того же типа, соединенных друг с другом параллельно для распределения нагрузки.
[0018] Сглаживающий конденсатор 15 подсоединен между катодом 18а и анодом 18b высоковольтного вывода 18. Сглаживающий конденсатор 15 уменьшает пульсацию тока, протекающего между парой преобразователей 10а, 10b напряжения и инвертором 20.
[0019] Инвертор 20 преобразует электрическую энергию постоянного тока аккумулятора 3 с напряжением, повышаемым преобразователями 10а, 10b напряжения, в трехфазную электрическую энергию переменного тока, и подает трехфазную электрическую энергию переменного тока на электродвигатель 21. Кроме того, инвертор 20 преобразует трехфазную электрическую энергию переменного тока, генерируемую электродвигателем 21, в электрическую энергию постоянного тока, и подает электрическую энергию постоянного тока на преобразователи 10а, 10b напряжения. Вид и описание конкретной конфигурации схемы инвертора 20 опущены. Инвертор 20 содержит датчики 19а-19с тока в соответствующих им трехфазных выходных линиях переменного тока.
[0020] Преобразователи 10а, 10b напряжения и инвертор 20 управляются контроллером 9. Контроллер 9 заставляет транзисторы 5а, 5b, 6а, 6b преобразователей 10а, 10b напряжения приводиться в действие на основе измеренных значений датчика тока 13 аккумулятора 3 и датчиков 12а, 12b тока, размещенных в преобразователе 10а, 10b напряжения соответственно. Контроллер 9 также управляет инвертором 20 на основе измеренных значений датчиков 19а-19с тока, предусмотренных в соответствующих трехфазных выходных линиях переменного тока инвертора 20.
[0021] Контроллер 2 электропитания содержит в общей сложности пять датчиков 12а, 12b, 19а-19с тока. Контроллер 2 электропитания предусматривает функцию выявления неисправности для выявления неисправности каждого из датчиков 12а, 12b, 19а-19с тока. Далее будет описана функция выявления неисправности. Общий ток U-фазы, ток V-фазы и ток W-фазы трехфазного переменного тока всегда равен нулю. Таким образом, когда общее количество измеренных значений трех датчиков 19а-19с тока, предусмотренных в соответствующих выходных линиях трехфазного переменного тока не равно нулю, может быть выявлено, что какой-либо из датчиков 19а-19с тока неисправен. При этом еще одно устройство нагрузки (не показано) присоединено между аккумулятором 3 и контроллером 2 электропитания, так что измеренное значение датчика 13 тока аккумулятора 3 не равно сумме измеренных значений датчиков 12а, 12b тока соответствующей пары преобразователей 10а, 10b напряжения. Каждый из датчиков 12а, 12b тока имеет другую функцию выявления неисправности. Функции выявления неисправности каждого из датчиков 12а, 12b тока будут описаны ниже.
[0022] Пять датчиков 12а, 12b, 19а-19с тока объединены в один блок датчика. Со ссылкой на фиг. 2А и 2B, будет описан блок 30 датчика тока. Фиг. 2А представляет собой вид спереди блока 30 датчика тока, а фиг. 2B представляет собой вид сверху блока 30 датчика тока. Ссылочная позиция 40 обозначает шину 40, которая формирует последовательное соединение между реактивной катушкой 4а и двумя транзисторами 5а, 6а преобразователя 10а напряжения. «Шина» представляет собой проводник для передачи большого тока с малыми потерями и, в частности, представляет собой длинную тонкую металлическую пластину из меди. Ссылочной позицией 41 обозначена шина 41, которая формирует последовательное соединение между реактивной катушкой 4b и двумя транзисторами 5b, 6b преобразователя 10b напряжения. Ссылочные позиции 42а-42с обозначают соответствующие шины соответствующих трехфазных выходных линий переменного тока инвертора 20.
[0023] На фиг. 2А и 2B показана система координат X0Y0Z0, которая обозначает общую систему координат. Общая система координат имеет ось Х0, которая идентична направлению пролегания каждой из шин 40, 41, 42а-42с. В то время, как локальная прямоугольная система координат, индивидуальная для каждого чипа датчика, будет определена ниже, следует отметить, что соответствующее направление относительно шин 40, 41, 42а-42с и сердечников 35, 36, 37а-37с для улавливания магнитного поля, описанных ниже, общей системы координат (системы X0Y0Z0 координат), всегда одинаково на последующих чертежах. Другими словами, общая система координат в настоящем описании привязана к сердечнику для улавливания магнитного поля.
[0024] Блок 30 датчика тока включает в себя: сердечники 35, 36, 37а-37с для улавливания магнитного поля, каждый в форме кольца, окружающего соответствующую шину; чипы 32а, 32b 33а, 33b, 34а-34с датчика, каждый из которых размещен в зазоре одного соответствующего сердечника для улавливания магнитного поля; контроллер 31 датчика; а также полимерную отливку, герметизирующую вышеуказанные компоненты. Каждая из этих шин также проходит через полимерную отливку. На фиг. 2А и 2B полимерная отливка не показана. На фиг. 2B, контроллер 31 датчика также не показан, равно как и полимерная отливка. Полимерная отливка позволяет каждому из сердечников 35, 36, 37а-37с для улавливания магнитного поля, чипам 32а, 32b, 33а, 33b, 34а-34с датчика и контроллеру 31 датчика иметь фиксированное взаимное расположение относительно соответствующей одной из шин.
[0025] Сердечник 35 для улавливания магнитного поля имеет форму кольца, и кольцо размещено таким образом, чтобы окружать шину 40. В сердечнике 35 для улавливания магнитного поля кольцо разделено в одном месте. Промежуток, создаваемый разделением, именуется как зазор. Два чипа 32а, 32b датчика размещены в зазоре сердечника 35 для улавливания магнитного поля. Сердечник 36 для улавливания магнитного поля также имеет форму кольца, которое разделено в одном месте, и кольцо размещено таким образом, чтобы окружать шину 41. Два чипа 33а, 33b датчика также размещены в зазоре сердечника 36 для улавливания магнитного поля. Сердечник 37а для улавливания магнитного поля размещен таким образом, чтобы окружать шину 42а, а один чип 34а датчика размещен в зазоре сердечника 37а для улавливания магнитного поля. Сердечник 37b для улавливания магнитного поля размещен таким образом, чтобы окружать шину 42b, а один чип 34b датчика размещен в зазоре сердечника 37b для улавливания магнитного поля. Сердечник для улавливания магнитного поля 37с размещен таким образом, чтобы окружать шину 42с, и один чип 34с датчика размещен в зазоре сердечника 37с для улавливания магнитного поля. Два чипа датчика размещены в зазоре каждого из сердечников 35, 36 для улавливания магнитного поля вдоль направления пролегания соответствующей одной из шин, так что сердечники 35, 36 для улавливания магнитного поля больше, чем другие сердечники 37а-37с для улавливания магнитного поля по ширине в направлении оси Х0. Общая система координат имеет ось Y0, направление которой соответствует направлению перпендикулярному каждой торцевой поверхности 351, 352, обращенной в зазор сердечника 35 для улавливания магнитного поля (и других сердечников для улавливания магнитного поля).
[0026] Каждый из чипов датчика содержит магнитоэлектрический преобразователь. Магнитоэлектрический преобразователь представляет собой, в частности, элемент на эффекте Холла, в котором электродвижущая сила изменяется в соответствии с уровнем измеренного магнитного поля. Сердечник для улавливания магнитного поля улавливает магнитное поле, вызванное током, протекающим через каждую из шин. Уровень генерируемого магнитного поля пропорционален току, протекающему через каждую из шин. Магнитоэлектрический преобразователь чипа датчика, размещенный в зазоре сердечника для улавливания магнитного поля, измеряет магнитное поле (магнитный поток), проходящее через зазор сердечника для улавливания магнитного поля. Чипы 32а, 32b, 33а, 33b, 34а-34с датчика подключены к контроллеру 31 датчика. Контроллер 31 датчика определяет величину тока, протекающего через каждую шину, исходя из уровня магнитного поля (магнитного потока), измеренного посредством каждого из чипов датчика (магнитоэлектрических преобразователей) и выдает определенный результат на контроллер 9. Сердечник 35 для улавливания магнитного поля, чипы 32а, 32b датчика и контроллер 31 датчика соответствуют датчику 12а тока на фиг. 1. Сердечник 36 для улавливания магнитного поля, чипы 33а, 33b датчика и контроллер 31 датчика соответствуют датчику 12b тока на фиг. 1. Сердечник 37а для улавливания магнитного поля, чип 34а датчика и контроллер 31 датчика соответствуют датчику тока 19а на фиг. 1. Сердечник 37b для улавливания магнитного поля, чипы 34b датчика и контроллер 31 датчика соответствуют датчику 19b тока на фиг. 1. Сердечник 37с для улавливания магнитного поля, чипы 34с датчика и контроллер 31 датчика соответствуют датчику 19с тока на фиг. 1.
[0027] Чипы 32а, 32b, 33а, 33b, 34а-34с датчика выполнены таким образом, что выходной ток изменяется в соответствии с уровнем магнитного поля, определенным каждым из магнитоэлектрических преобразователей внутри соответствующих чипов датчика. Магнитоэлектрический преобразователь может обнаруживать магнитное поле только в заранее заданном направлении, и направление называется направлением магнитной индукции. Направление магнитной индукции включает в себя положительное и отрицательное направления, и положительное направление является направлением, в котором выходной сигнал датчика для магнитного потока, проходящего через чип датчика (магнитоэлектрический преобразователь), является положительным значением. Другими словами, каждый из чипов 32а, 32b, 33а, 33b, 34а-34с датчика выдает ток с положительным значением, при приеме магнитного поля в направлении, совпадающем с его направлением магнитной индукции, и выдает ток с отрицательным значением при приеме магнитного поля в направлении, противоположном его направлению магнитной индукции.
[0028] Ниже описана функция обнаружения отказа датчика тока. Как описано выше, в сумме трехфазные выходные сигналы переменного тока всегда равны нулю. Контроллер 31 датчика выдает сигнал (сигнал ошибки) на контроллер 9, при этом сигнал указывает, что в каком-либо из чипов 34а-34с датчика возникло отклонение, когда абсолютное значение суммарного значения измерений чипов 34а-34с датчика превышает заранее заданное пороговое значение.
[0029] Датчик тока, содержащий сердечник 35 для улавливания магнитного поля, чипы 32а, 32b датчика и контроллер 31 датчика, имеет функцию обнаружения отказа, отличную от таковой у датчика тока, содержащего сердечник 36 для улавливания магнитного поля, чипы 33а, 33b датчика и контроллер 31 датчика. Далее будет описана функция обнаружения отказа датчика тока, содержащего сердечник 35 для улавливания магнитного поля, чипы 32а, 32b датчика и контроллер 31 датчика. Нижеследующее описание может быть применено к датчику тока, содержащему сердечник 36 для улавливания магнитного поля, чипы 33а, 33b датчика и контроллер 31 датчика.
[0030] Чипы 32а, 32b датчика имеют одинаковый тип (одинаковую форму) и размещены в зазоре сердечника 35 для улавливания магнитного поля. Когда чипы 32а, 32b датчика являются стандартными, выходные сигналы соответствующих чипов датчика равны друг другу. Когда имеется разность, равная или превышающая заранее заданное значение между выходными сигналами соответствующих чипов 32а, 32b датчика, можно обнаружить, что какой-либо из чипов 32а, 32b датчика не работает. Контроллер 31 датчика выдает сигнал ошибки (сигнал, указывающий на то, что возникает отклонение), когда разность выходных сигналов (разность абсолютной величины выходных сигналов) двух чипов 32а, 32b датчика, размещенных в зазоре сердечника 35 для улавливания магнитного поля, превышает заранее заданное пороговое значение. Заранее заданное пороговое значение устанавливается на основе допустимого отклонения разности выходных сигналов, когда два чипа 32а, 32b датчика нормально работают.
[0031] Предпочтительно, чтобы разность выходных сигналов двух чипов 32а, 32b датчика, размещенных в зазоре сердечника 35 для улавливания магнитного поля, была как можно ближе к нулю. Таким образом, два чипа 32а, 32b датчика размещены в зазоре сердечника 35 для улавливания магнитного поля, чтобы получить магнитное поле одинакового уровня. В частности, два чипа 32а, 32b датчика размещены по отдельности на соответствующих сторонах от прямой линии, проходящей через центр зазора, и размещены в соответствующих положениях, равноудаленных от центра зазора, если смотреть с направления, перпендикулярного каждой торцевой поверхности 351, 352, обращенной в зазор сердечника 35 для улавливания магнитного поля. Этот пункт будет подробно описан ниже со ссылкой на фиг. 3А, 3B и 4. Центр зазора, если смотреть с перпендикулярного направления, является, другими словами, центром торцевой поверхности. В дальнейшем «центр зазора, если смотреть с перпендикулярного направления торцевых поверхностей», может именоваться просто «центром торцевой поверхности».
[0032] Из-за обстоятельств, связанных с изготовлением или конструкцией, магнитоэлектрический преобразователь в каждом из чипов датчика может находиться в положении, отклоненном от центра чипа в заранее заданном направлении. Когда два чипа датчика выровнены в одинаковом положении в зазоре, если смотреть с перпендикулярного направления торцевых поверхностей, магнитоэлектрический преобразователь одного из чипов датчика находится ближе к центру зазора, чем центр чипа, а магнитоэлектрический преобразователь другого из чипов датчика находится дальше от центра зазора, чем центр чипа. То есть, даже если два чипа датчика размещены в соответствующих симметричных положениях по отношению к центру зазора, если смотреть с перпендикулярного направления, каждый из магнитоэлектрических преобразователей в двух соответствующих чипах датчика может иметь иное расстояние от центра торцевой поверхности. Когда магнитоэлектрические преобразователи в двух соответствующих чипах датчика отличаются друг от друга расстоянием от центра зазора, абсолютные значения выходных сигналов двух соответствующих магнитоэлектрических преобразователей (чипов датчика) отличаются друг от друга. Желательно, чтобы пороговое значение для определения отказа было небольшим при реализации функции обнаружения отказа на основе разности выходных сигналов между двумя чипами 32а, 32b датчика. Два чипа 32а, 32b датчика размещены за счет предпринятых мероприятий таким образом, что разность выходных сигналов между двумя чипами датчика не увеличивается даже тогда, когда положение каждого из магнитоэлектрических преобразователей в соответствующих чипах датчика отклоняется от центра чипа датчика. Ниже будет описано размещение чипов 32а, 32b датчика в зазоре.
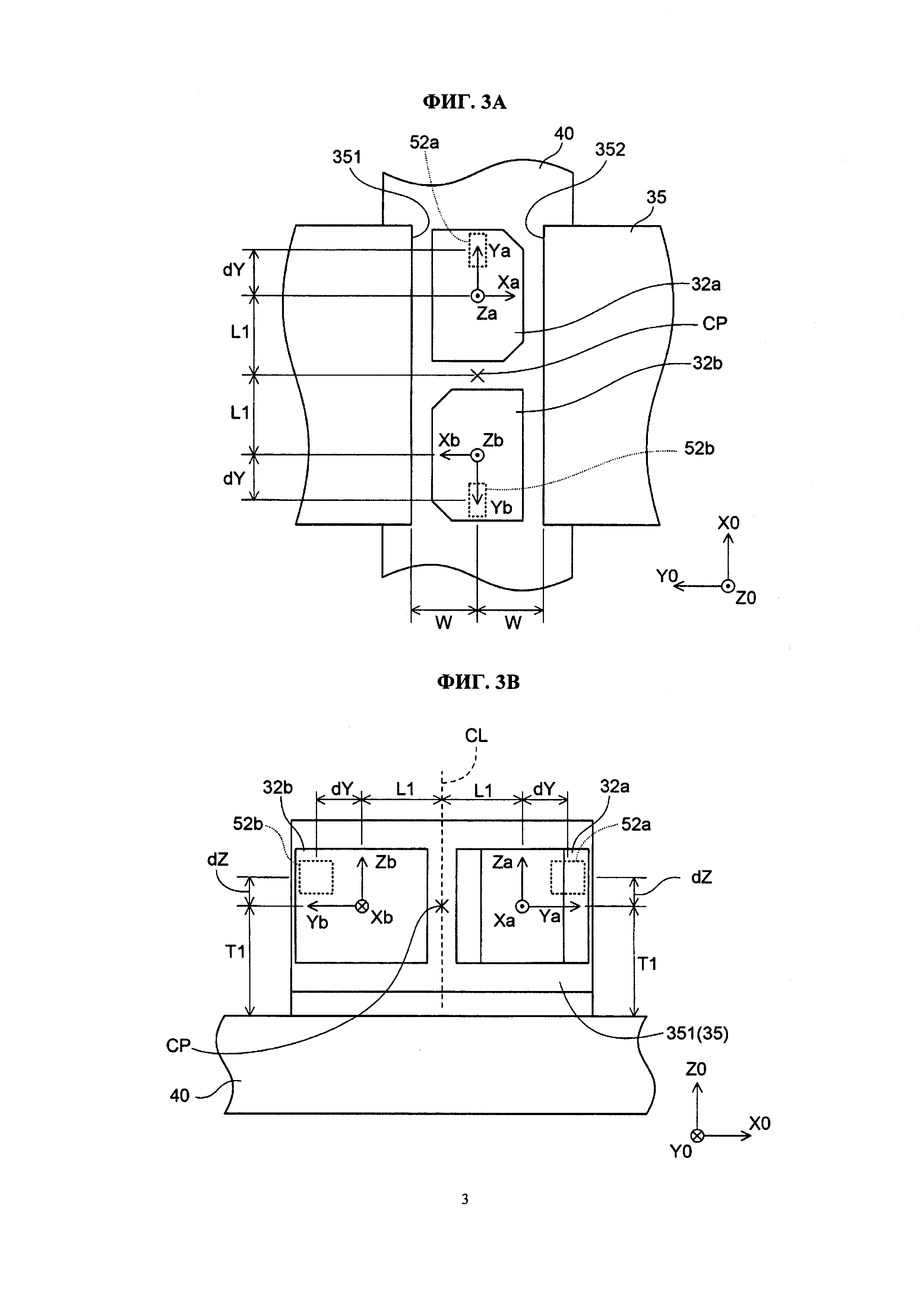
[0033] Фиг. 3А представляет увеличенный вид сверху границы зазора сердечника 35 для улавливания магнитного поля, а на фиг. 3B показана схема размещения чипов 32а, 32b датчика, если смотреть с перпендикулярного направления торцевых поверхностей 351 сердечника 35 для улавливания магнитного поля, обращенного к зазору. Перпендикулярное направление торцевых поверхностей 351 соответствует направлению оси Y0 общей системы координат. Магнитоэлектрический преобразователь 52а встроен в чип 32а датчика, а магнитоэлектрический преобразователь 52b встроен в чип 32b датчика. Магнитоэлектрические преобразователи 52а, 52b каждый представляют собой элемент Холла, который может обнаруживать магнитное поле (магнитный поток), проходящее через элемент в определенном направлении. Как описано выше, направление магнитного поля (магнитного потока), обнаруженное элементом, называется направлением магнитной индукции.
[0034] Здесь будет определена локальная прямоугольная система координат, индивидуальная для каждого чипа датчика. Локальная прямоугольная система координат вводится для установления положения каждого чипа датчика по отношению к сердечнику 35 для улавливания магнитного поля (общей системы координат). Локальная прямоугольная система координат имеет исходную точку, установленную в центре чипа датчика. Локальная прямоугольная система координат имеет ось X, которая идентична направлению магнитной индукции встроенного магнитоэлектрического преобразователя. Ось X локальной прямоугольной системы координат имеет положительное направление, в котором выходной сигнал чипа датчика увеличивается с увеличением магнитного поля (магнитного потока). Другими словами, положительное направление по оси X представляет собой направление, в котором интенсивность магнитного поля (магнитного потока) и выходного сигнала чипа датчика имеют положительную взаимозависимость. Локальная прямоугольная система координат имеет ось Y, которая пролегает в направлении, перпендикулярном направлению магнитной индукции (или оси X), и тождественна характерному направлению чипа датчика. Ось Z задается как направление, ортогональное оси X и оси Y. Как показано на фиг. 3А и 3B, локальная прямоугольная система координат чипа 32а датчика обозначена как Ха, Ya и Za, а локальная прямоугольная система координат чипа 32b датчика обозначена как Xb, Yb и Zb.
[0035] Каждый из чипов 32а, 32b датчика представляет собой чип одинакового типа, положение каждого из магнитоэлектрических преобразователей 52а, 52b внутри соответствующих чипов 32а, 32b датчика отклоняется от центра соответствующего одного из чипов датчика в том же направлении. Фактическое положение каждого из магнитоэлектрических преобразователей 52а, 52b отклоняется от исходной точки локальной прямоугольной системы координат на dY в положительном направлении по оси Y (ось Ya и ось Yb).
[0036] Два чипа 32а, 32b датчика размещены так, что центр (или исходная точка локальной прямоугольной системы координат) каждого из чипов находится в серединной точке в промежутке между парой торцевых поверхностей 351, 352, обращенных в зазор сердечника 35 для улавливания магнитного поля. Как показано на фиг. 3А, центр каждого из магнитоэлектрических преобразователей (или исходная точка каждой из местных прямоугольных систем координат) находится на расстоянии W от каждой торцевой поверхности 351, 352.
[0037] Кроме того, два чипа 32а, 32b датчика размещены по отдельности на соответствующих сторонах от прямой линии (центральной линии CL), проходящей через центр CP зазора (центр торцевой поверхности), ортогонально к шине 40, если смотреть с перпендикулярного направления (направления Y0 на чертежах) к каждой из торцевых поверхностей 351, 352, обращенных в зазор сердечника 35 для улавливания магнитного поля. Кроме того, каждый из двух чипов 32а, 32b датчика размещен в положении, равноудаленном от центра CP зазора, если смотреть с перпендикулярного направления каждой из торцевых поверхностей 351, 352. То есть, на фиг. 3А и 3B, расстояние L1 между центром CP зазора и исходной точкой локальной прямоугольной системы координат чипа 32а датчика равно расстоянию L1 между центром CP зазора и исходной точкой локальной прямоугольной системы координат чипа 32b датчика. При этом чипы 32а, 32b датчика размещены таким образом, что оси Y (ось Ya и ось Yb) соответствующих локальных прямоугольных систем координат соответствующих чипов датчика проходят в противоположных друг другу направлениях. Как показано на фиг. 3А и 3B, ось Ya локальной прямоугольной системы координат чипа 32а датчика и ось Yb локальной прямоугольной системы координат чипа 32b датчика проходят в противоположных друг другу направлениях.
[0038] Размещение, описанное выше, позволяет магнитоэлектрическим преобразователям 52а, 52b находиться в соответствующих местоположениях от центра CP зазора на расстоянии «L1+dY» в соответствующих чипах 32а, 32b датчика. Размещение на фиг. 3B выглядит, другими словами, следующим образом. Два чипа 32а, 32b датчика размещены осесимметрично относительно прямой линии (центральной линии CL), проходящей через центр CP зазора (центр торцевой поверхности), включая положение чипов датчика, если смотреть с перпендикулярного направления торцевых поверхностей. Центральная линия CL соответствует серединному перпендикуляру в центре (исходной точке локальной системы координат) промежутка между двумя чипами 32а, 32b датчика. Таким образом, размещение двух чипов 32а, 32b датчика также может быть описано, другими словами, следующим образом. Два чипа 32а, 32b датчика размещены таким образом, что серединный перпендикуляр в центре промежутка между двумя чипами датчиков проходит через центр CP зазора (центр торцевой поверхности), и при этом размещены так, чтобы быть зеркально симметричными серединному перпендикуляру, включая положение двух чипов датчика, если смотреть с перпендикулярного направления торцевых поверхностей.
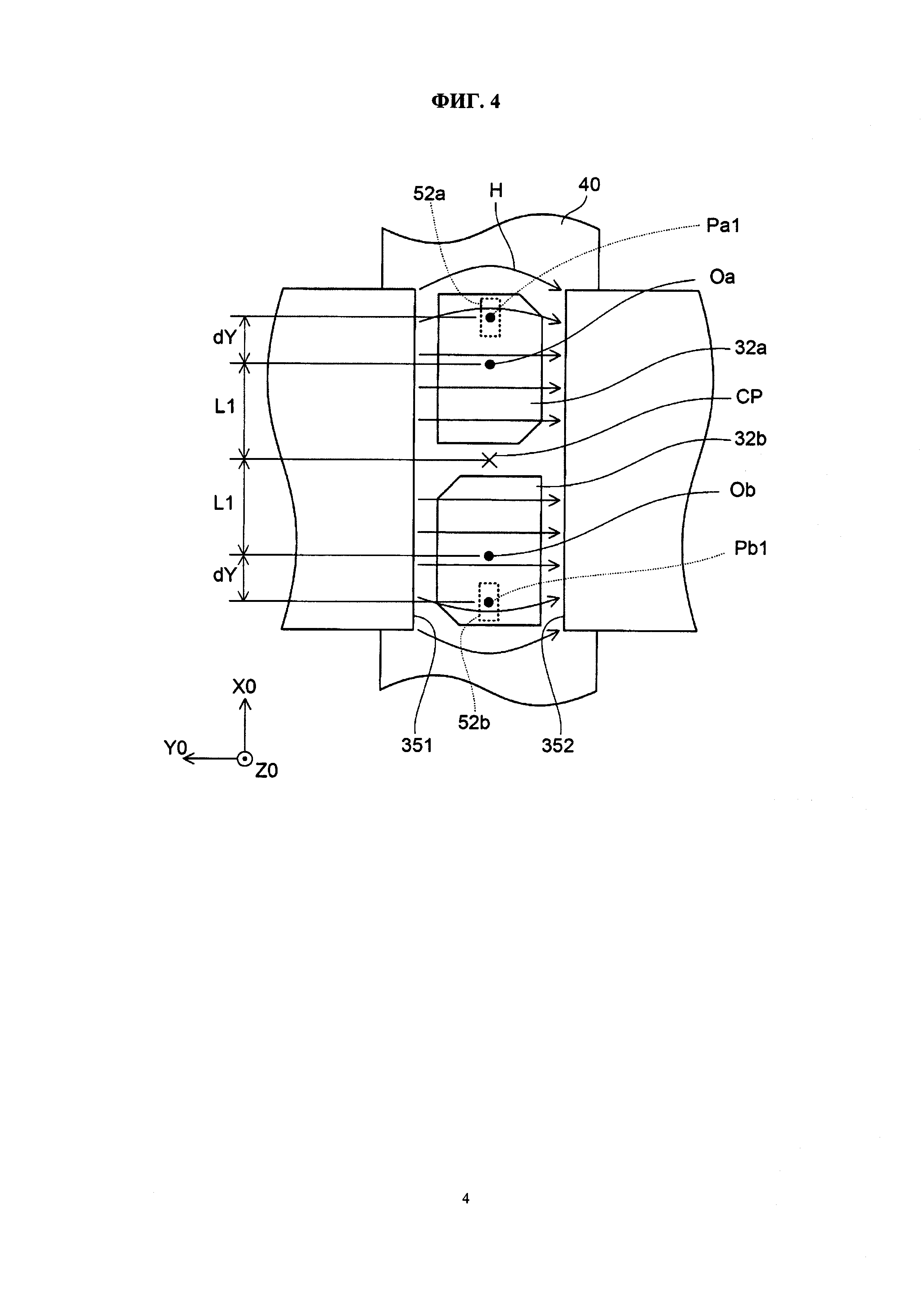
[0039] Фиг. 4 представляет собой схематический чертеж, показывающий взаимное расположение магнитоэлектрического преобразователя и магнитного поля в зазоре. Каждая стрелка Н обозначает магнитное поле (магнитное поле Н). Магнитное поле Н вертикально симметрично относительно центра CP зазора (верхняя и нижняя части фиг. 4). Магнитное поле Н является параллельным и однородным вблизи центра CP зазора, однако изгибается при удалении от центра CP зазора. Чипы 32а, 32b датчика содержат соответствующие магнитоэлектрические преобразователи, которые расположены в соответствующих местах Pa1, Pb1, отклоненных на dY от центра соответствующего чипа датчика (исходных точки Оа, Ob соответствующих локальных прямоугольных систем координат) в соответствующем одном из Ya, Yb направлений локальной прямоугольной системы координат. Ось Ya и ось Yb в локальной прямоугольной системе координат проходят в соответствующих направлениях, противоположных друг другу, так что расстояние от центра CP зазора до каждого из магнитоэлектрических преобразователей 52а, 52b составляет «L1+dY» в соответствующем одном из чипов 32а, 32b датчика и, соответственно, магнитное поле Н и каждый из магнитоэлектрических преобразователей 52а, 52b имеют одинаковое относительное взаимное расположение. В результате, даже когда положение каждого из магнитоэлектрических преобразователей в соответствующих чипах датчика отклоняется от соответствующего центра чипа, разность выходных сигналов между двумя чипами 32а, 32b датчика не увеличивается.
[0040] Со ссылкой на фиг. 3B, будет описано взаимное расположение магнитоэлектрических преобразователей 52а, 52b, встроенных в два соответствующих чипа 32а, 32b датчика, в направлении Z0. Считается, что положение в направлении Z локальной прямоугольной системы координат магнитоэлектрического преобразователя отклоняется от центра чипа на dZ. Центр чипа (исходная точка локальной прямоугольной системы координат) находится в местоположении, удаленном от шины 40 на расстояние Т1. При этом каждый из магнитоэлектрических преобразователей 52а, 52b удален от центра CP зазора (центра концевой поверхности) на dZ, если смотреть с перпендикулярного направления торцевых поверхностей, так что расстояние от шины 40 до каждого из магнитоэлектрических преобразователей 52а, 52b равно «Т1+dZ». Кроме того, расстояние от центра CP зазора до каждого из магнитоэлектрических преобразователей 52а, 52b в направлении Z0 равно dZ. Таким образом, даже когда оси (ось Za и ось Zb) соответствующих локальных прямоугольных систем координат двух соответствующих чипов 32а, 32b датчика проходят в одном направлении, в направлении (направлении Z0 глобальной системы координат), которое пересекается с выровненным направлением двух магнитоэлектрических преобразователей 52а, 52b, разность выходных сигналов между двумя чипами 32а, 32b датчика не увеличивается.
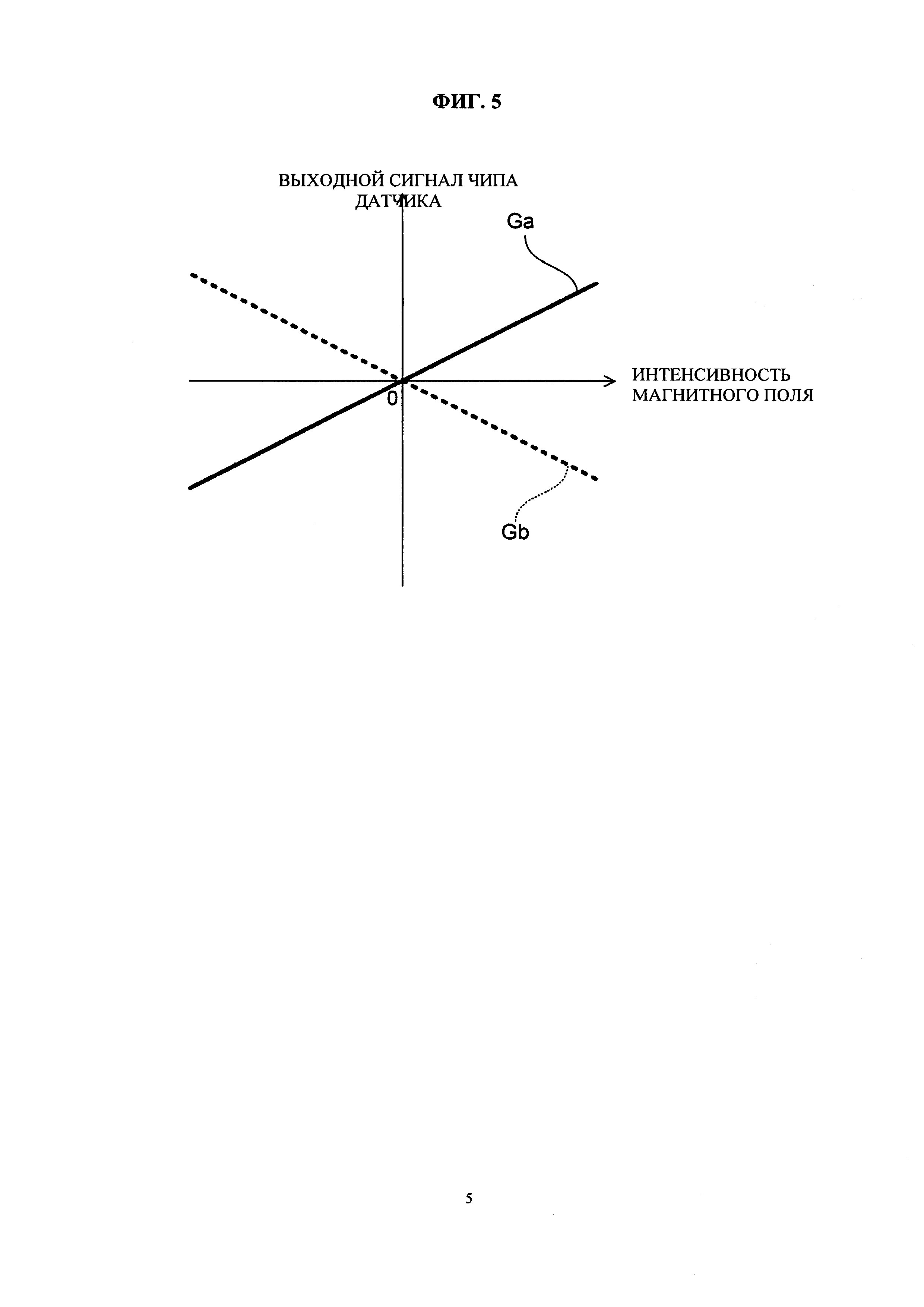
[0041] Два чипа 32а, 32b датчика размещены так, что оси X, обозначающие соответствующие направления магнитной индукции соответствующих магнитоэлектрических преобразователей 52а, 52b, проходят в противоположных друг другу направлениях. Эта функция обеспечивает следующее преимущество. Фиг. 5 представляет собой график, имеющий горизонтальную ось, обозначающую интенсивность магнитного поля, и вертикальную ось, которая обозначает выходной сигнал чипа датчика. Как описано выше, выходной сигнал каждого из чипов 32а, 32b датчика имеет положительное значение, когда направление магнитного поля совпадает с направлением магнитной индукции (положительное направление по оси X локальной прямоугольной системы координат). Когда направление магнитного поля противоположно направлению магнитной индукции (положительному направлению по оси X локальной прямоугольной системы координат), выходной сигнал каждого из чипов 32а, 32b датчика имеет отрицательное значение. Это формирует график, на котором выходные сигналы соответствующих чипов 32а, 32b датчика, в которых оси X соответствующих локальных прямоугольных систем координат проходят в направлениях, противоположных друг другу, пересекаются друг с другом в исходной точке, как показано на фиг. 5. На графике построенная линия Ga обозначает выходные сигналы чипа 32а датчика, а построенная линия Gb обозначает выходные сигналы чипа 32b датчика. Из фиг. 5 можно понять, что разность выходных сигналов (разность абсолютной величины выходных сигналов) между двумя чипами 32а, 32b датчика может быть получена путем простого сложения выходных сигналов чипа 32а датчика и чипа 32b датчика с помощью блока суммирования. Это упрощает конфигурацию схемы контроллера 31 датчика, который выводит сигнал ошибки, когда разность между двумя чипами 32а, 32b датчика превышает заданное пороговое значение.
[0042] Признаки датчика тока, включающего в себя чипы 32а, 32b датчика, сердечник 35 для улавливания магнитного поля и контроллер 31 датчика, описаны ниже. Сердечник 35 для улавливания магнитного поля имеет форму кольца, разделенного в одном месте с образованием зазора. Кольцо окружает шину (проводник, через который протекает измеряемый ток). Чипы 32а, 32b датчика являются чипами одного и того же типа (одинаковой формы) и размещены в зазоре сердечника 35 для улавливания магнитного поля. Чип 32а датчика содержит магнитоэлектрический преобразователь 52а, а также чип 32b датчика содержит магнитоэлектрический преобразователь 52b. Два чипа 32а, 32b датчика размещены по отдельности на соответствующих сторонах от прямой линии (центральной линии CL), проходящей через центр CP зазора (центр торцевой поверхности), ортогонально к шине 40, если смотреть с перпендикулярного направления пары торцевых поверхностей 351, 352, обращенных в зазор сердечника 35 для улавливания магнитного поля. Каждый из двух чипов 32а, 32b датчика находится в местоположении, равноудаленном от центра CP зазора, если смотреть с перпендикулярного направления. Исходная точка установлена в центре каждого из чипов 32а, 32b датчика, а локальная прямоугольная система координат определена так, что ось X ориентирована вдоль направления магнитной индукции каждого из встроенных магнитоэлектрических преобразователей 52а, 52b, а ось Y и ось Z каждая ортогональны направлению магнитной индукции. При этом, два чипа 32а, 32b датчика размещены так, что оси X соответствующих локальных прямоугольных систем координат двух соответствующих чипов датчика проходят вдоль перпендикулярного направления торцевых поверхностей 351, а их оси Y проходят параллельно выровненному направлению двух чипов 32а, 32b датчика и проходят в противоположных друг другу направлениях. Другими словами, два чипа 32а, 32b датчика размещены таким образом, что их направления магнитной индукции, для которых магнитный поток выходит с положительным значением, являются противоположными друг другу в перпендикулярном направлении торцевых поверхностей сердечника для улавливания магнитного поля, и размещены осесимметрично относительно прямой линии (центральной линии CL), проходящей через центр CP зазора (центр торцевой поверхности), включая положение чипов датчика, если смотреть с перпендикулярного направления.
[0043] Контроллер 31 датчика выдает сигнал ошибки, когда разность выходных сигналов (разность абсолютных величин выходных сигналов) между двумя чипами 32а, 32b датчика (магнитоэлектрическими преобразователями 52а, 52b) превышает заранее заданное пороговое значение. Контроллер 31 датчика вычисляет и выводит значение тока, протекающего через шину 40, на основе, по меньшей мере, одного из выходных сигналов двух соответствующих чипов 32а, 32b датчика.
[0044] Два чипа 32а, 32b датчика размещены таким образом, что оси X соответствующих локальных прямоугольных систем координат двух соответствующих чипов 32а, 32b датчика ориентированы в противоположных друг другу направлениях. Такое размещение позволяет контроллеру 31 датчика получать разность (разность абсолютной величины выходных сигналов) между двумя чипами 32а, 32b датчика при простой конфигурации схемы.
[0045] Размещение чипов 33а, 33b датчика, показанных на фиг. 2, также идентично размещению чипов 32а, 32b датчика, так что можно получить эквивалентные предпочтительные результаты.
[0046] Со ссылкой на фиг. 6А и 6B, будет описан другой пример размещения двух чипов 32а, 32b датчика. Фиг. 6А и 6B соответствуют фиг. 3А и 3B, соответственно. На фиг. 3А и 3B, оси X (ось Ха и ось Xb) соответствующих локальных прямоугольных систем координат соответствующих чипов 32а, 32b датчика проходят в противоположных друг другу направлениях. В модификации фиг. 6А и 6B, оси X (ось Ха и ось Xb) соответствующих локальных прямоугольных систем координат соответствующих чипов 32а, 32b датчика проходят в одном направлении. Вместо этого оси Z (ось Za и ось Zb) соответствующих локальных систем координат проходят в противоположных друг другу направлениях. Оси Y (ось Ya и ось Yb) соответствующих локальных прямоугольных систем координат, пролегающие в выровненном направлении двух чипов 32а, 32b датчика, проходят в противоположных друг другу направлениях, как на фиг. 3А и 3B. Размещение на фиг. 6А и 6B также позволяет каждому из магнитоэлектрических преобразователей 52а, 52b соответствующих чипов 32а, 32b датчика находиться на равноудаленном расстоянии (L1+dY) от центра CP зазора (центра торцевой поверхности), если смотреть с перпендикулярного направления торцевых поверхностей, когда местоположение каждого из магнитоэлектрических преобразователей 52а, 52b в соответствующих чипах датчиков отклоняется от центра чипа (исходной точки локальной прямоугольной системы координат) на dY в направлении оси Y локальной прямоугольной системы координаты. Даже в этом случае разность выходных сигналов между двумя чипами 32а, 32b датчика не увеличивается.
[0047] При размещении как на фиг. 6B, в то время как два чипа 32а, 32b датчика размещены осесимметрично по отношению к центральной линии CL, обе оси Z и оси Y соответствующих локальных систем координат проходят в противоположных направлениях, и, таким образом, размещение не является зеркально-симметричным. Два чипа 32а, 32b датчика размещены центрально симметрично относительно центра CP зазора (центру торцевой поверхности), если смотреть с перпендикулярного направления торцевых поверхностей. «Центрально симметрично» также включает в себя размещение чипов датчика. То, что два чипа датчиков, являются центрально симметричными относительно центра CP зазора, включая их размещение, означает, что не только местоположения двух соответствующих чипов датчика являются центрально симметричными относительно центра CP зазора, но также контуры соответствующих чипов датчика совмещаются друг с другом, когда один из чипов датчика поворачивается на 180 градусов вокруг их центра, чтобы быть наложенным поверх другого чипа датчика.
[0048] При размещении как на фиг. 6А и 6B, оси Z (ось Za и ось Zb) соответствующих локальных систем координат проходят в противоположных друг другу направлениях. Когда центры (центры чипов) соответствующих чипов 32а, 32b датчика размещены центрально симметрично относительно центра CP зазора, если смотреть с перпендикулярного направления торцевых поверхностей, разность выходных сигналов между двумя чипами датчика не увеличивается, даже когда местоположения соответствующих магнитоэлектрических преобразователей отклонены от соответствующих центров чипов. Как показано на фиг. 6B, даже когда местоположения магнитоэлектрических преобразователей 52а, 52b соответствующих чипов 32а, 32b датчика отклонены от соответствующих центров чипов на dZ в положительном направлении оси Z каждой из местных прямоугольных систем координат, расстояния от центра CP зазора до соответствующих магнитоэлектрических преобразователей 52а, 52b становятся равными друг другу. В результате относительное взаимное расположение между соответствующими магнитоэлектрическими преобразователями 52а, 52b и магнитным полем становятся идентичными друг другу, так что разность выходных сигналов между соответствующими чипами 32а, 32b датчика не увеличивается. Это преимущество может быть получено, когда чипы 32а, 32b датчика размещены центрально симметрично относительно центра CP зазора, если смотреть с перпендикулярного направления торцевых поверхностей 351.
[0049] Со ссылкой на фиг. 7 и фиг. 8, будет описан еще один пример размещения двух чипов 32а, 32b датчика. В примере размещения на фиг. 7 и 8, два чипа 32а, 32b датчика расположены по отдельности на соответствующих сторонах от прямой линии (центральной линии CL2), проходящей через центр CP зазора параллельно шине 40, если смотреть с перпендикулярного направления (направления Y0 глобальной системы координат) каждой из торцевых поверхностей 351, 352 сердечника 135 для улавливания магнитного поля.
[0050] Два чипа 32а, 32b датчика размещены так, чтобы находиться посередине в промежутке между парой торцевых поверхностей 351, 352, обращенных в зазор сердечника 135 для улавливания магнитного поля. Как показано на фиг. 7, два чипа 32а, 32b датчика размещены в местоположении, удаленном от любой из торцевых поверхностей 351, 352 на расстояние W. Кроме того, каждый из двух чипов 32а, 32b датчика расположен в равноудаленном положении (расстоянии L2) от центра CP зазора (центр торцевой поверхности), если смотреть с перпендикулярного направления торцевых поверхностей 351. При этом исходная точка установлена в центре каждого из чипов 32а, 32b датчика, а локальная прямоугольная система координат определена таким образом, что ось X направлена вдоль направления магнитной индукции каждого из магнитоэлектрических преобразователей 52а, 52b внутри соответствующих чипов 32а, 32b датчика, а ось Y и ось Z каждая проходят в направлении, ортогональном направлению магнитной индукции. При этом два чипа 32а, 32b датчика размещены так, что оси X соответствующих локальных прямоугольных систем координат двух соответствующих чипов 32а, 32b датчика проходят в перпендикулярном направлении, а их оси Y пролегают параллельно выровненному направлению двух чипов 32а, 32b датчика и в направлениях, противоположных друг другу. В примере на фиг. 7 и фиг. 8, местоположение каждого из магнитоэлектрических преобразователей 52а, 52b в соответствующих чипах отклонено от соответствующего одного из центров чипа на dY в положительном направлении оси Y локальной прямоугольной системы координат. Как показано на фиг. 7 и фиг. 8, в этом случае каждый из магнитоэлектрических преобразователей 52а, 52b в соответствующих чипах 32а, 32b датчиков удален от центра зазора CP на расстояние «L2+dY». Каждый из магнитоэлектрических преобразователей 52а, 52b находится на равном расстоянии от центра CP зазора, так что разность выходных сигналов между двумя чипами 32а, 32b датчика не увеличивается.
[0051] При размещении, как на фиг. 8, два чипа 32а, 32b датчика также размещены центрально симметрично относительно центра CP зазора (центра торцевой поверхности), включая размещение двух чипов датчика, если смотреть с перпендикулярного направления торцевых поверхностей, обращенных в зазор.
[0052] Будет описано рассмотрение приемов, описанных в примере. Особенности размещения на фиг. 3А и фиг. 3B могут быть выражены вместе с особенностями размещения с фиг. 8 следующим образом. Желательно, чтобы два чипа датчика размещались по отдельности на соответствующих сторонах от прямой линии CL, проходящей через центр CP зазора, ортогонально к шине (проводнику) или от прямой CL2, проходящей через центр CP зазора, параллельно шине (проводнику), если смотреть с перпендикулярного направления торцевых поверхностей, обращенных в зазор сердечника для улавливания магнитного поля. Центр CP зазора означает центр (центр торцевой поверхности) контура каждой торцевой поверхности, обращенной в зазор сердечника для улавливания магнитного поля, если смотреть с перпендикулярного направления торцевых поверхностей. Когда контур каждой из торцевых поверхностей, обращенных в зазор сердечника для улавливания магнитного поля, имеет круглую форму, два чипа датчика могут располагаться по отдельности на соответствующих сторонах от прямой линии в любом направлении, если смотреть с перпендикулярного направления торцевых поверхностей, когда прямая проходит через центр зазора.
[0053] Каждая из пары торцевых поверхностей в поперечном направлении зазора может иметь форму с вертикальной и двусторонней симметрией, если смотреть с перпендикулярного направления. В то время как пара торцевых поверхностей в поперечном направлении зазора не должна быть одинаковой формы, каждая из торцевых поверхностей может быть вертикально и двусторонне симметричной относительно центра торцевой поверхности.
[0054] В каждом примере размещения согласно примеру, два чипа датчика размещены так, что центр зазора находится в серединной точке отрезка линии, соединяющего центры датчиков двух соответствующих чипов датчика, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля. Другими словами, в примере размещения на фиг. 3А и фиг. 3B, а также 6А и 6B, два чипа датчика размещены так, что каждый их центр находится на прямой линии, проходящей через центр зазора параллельно направлению пролегания шинной шины 40, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля. Другими словами, в примере размещения на фиг. 7 и фиг. 8, два чипа датчика размещены так, что центры каждого из них находятся на прямой линии, проходящей через центр зазора, ортогонально шине 40, если смотреть с перпендикулярного направления торцевых поверхностей сердечника для улавливания магнитного поля.
[0055] Хотя желательно, чтобы каждое из местоположений двух соответствующих чипов датчика в перпендикулярном направлении торцевых поверхностей сердечника для улавливания магнитного поля находилось в серединной точке в промежутке между парой торцевых поверхностей, каждое из местоположений не ограничено серединной точкой.
[0056] Три типа в примере размещения двух чипов 32а, 32b датчика и их преимущества также могут быть применены к чипам 33а, 33b датчика и сердечнику 36 для улавливания магнитного поля, показанным на фиг. 2А и фиг. 2B.
[0057] В описанном выше примере магнитоэлектрический преобразователь размещен в чипе датчика в местоположении, отклоненном от центра чипа. Когда магнитоэлектрический преобразователь размещен в чипе датчика в центре чипа, предполагается, что два чипа датчика могут быть размещены в зазоре в таком же положении. Однако, даже когда местоположение магнитоэлектрического преобразователя в чипе по конструкции является центром чипа, предпочтительно, чтобы два чипа датчика располагались осесимметрично или центрально симметрично. Даже когда местоположение магнитоэлектрического преобразователя в чипе по конструкции является центром чипа, местоположение магнитоэлектрического преобразователя в чипах может отклоняться от местоположения в конструкции в зависимости от специфических характеристик производственного устройства или производственного процесса. Специфические характеристики производственного устройства или производственного процесса применимы ко всем изготовленным чипам датчиков, так что фактическое положение каждого из магнитоэлектрических преобразователей в соответствующем множестве чипов датчика отклонено от центра чипа в одном и том же направлении. То есть, это применяется для такого же положения, что и в примере, описанном выше. Даже когда местоположение магнитоэлектрического преобразователя в чипе датчика по конструкции является центром чипа, приемы, раскрытые в настоящем описании, эффективны.
[0058] Датчик тока, содержащий сердечник 35 для улавливания магнитного поля и чипы 32а, 32b датчика в примере, соответствует примеру датчика тока согласно формуле изобретения. Контроллер 31 датчика в этом примере соответствует примеру контроллера датчика согласно формуле изобретения.
[0059] Хотя конкретные примеры настоящего изобретения подробно описаны выше, они описаны только в качестве примеров, и, таким образом, не ограничивают объем формулы изобретения. Технологии в соответствии с формулой изобретения включают в себя различные варианты и модификации конкретных примеров, например, описанных выше. Технические элементы, представленные в настоящем описании и чертежах, обеспечивают техническую применимость как таковые или посредством их различных комбинаций, и, таким образом, не ограничиваются комбинациями в соответствии с формулой изобретения на момент подачи настоящей заявки. Кроме того, приемы, описанные в настоящем описании и чертежах, например, могут одновременно достигать множества целей и иметь техническую применимость путем достижения одной из целей.
Реферат
Группа изобретений относится к датчику тока. В двух чипах датчика размещены соответствующие магнитоэлектрические преобразователи. Указанные два чипа датчика размещены в зазоре, при этом два чипа датчика размещены таким образом, что направление магнитной индукции относительно каждого из двух чипов датчика является таким же, как и перпендикулярное направление относительно торцевых поверхностей сердечника для улавливания магнитного поля, при этом торцевые поверхности обращены в зазор, и два чипа датчика расположены осесимметрично относительно прямой линии, проходящей через центр зазора. Технический результат – возможность определения неисправности датчика. 2 н. и 2 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Усовершенствованный датчик тока
Комментарии