Крепежный элемент для сенсора тока - RU2642390C1
Код документа: RU2642390C1
Чертежи






Описание
Изобретение касается крепежного элемента для сенсора тока согласно ограничительной части независимого п.1 формулы изобретения.
Такие крепежные элементы нужны, чтобы можно было крепить сенсор тока на крепежной поверхности не только лежа, в плоском положении, но и, альтернативно этому, также стоя.
Уровень техники
Из публикации EP 1181698 B1 известен сенсор тока, имеющий два положения монтажа, который может крепиться на опорной поверхности либо стоя, либо лежа, в плоском положении. Этот сенсор тока имеет корпус, который имеет первую группу проемов для крепежных винтов, оси которых перпендикулярны большой поверхности корпуса, для крепления его на опорной поверхности лежа в плоском положении, при этом вторая группа проемов для крепежных винтов, оси которых перпендикулярны осям первой группы проемов под винты, предусмотрена для вертикального крепления корпуса на опорной поверхности, отличается тем, что он дополнительно имеет по меньшей мере вспомогательный элемент для прифланцовывания, который предназначен для корпуса и соединен с ним комплементарным по форме образом, исключительно для вертикального крепления корпуса на опорной поверхности, и в котором выполнена вторая группа проемов под винты.
В частности, в этой публикации раскрыта система, у которой два таких вспомогательных элемента для прифланцовывания с помощью всего 4 винтов через проемы под винты в корпусе крепятся друг к другу и вместе с тем к корпусу. Кроме того, эти два вспомогательных элемента для прифланцовывания с помощью всего четырех других винтов могут под прямым углом к этому привертываться к опорной поверхности, так что в этом варианте осуществления для крепления одного единственного сенсора тока нужны и должны завертываться всего восемь винтов.
Кроме того, например, из международного промышленного образца DM/062779 известна конструкция сенсора тока, которая также отличается двумя крепежными элементами меньшего размера. Эти два крепежных элемента, очевидно, предусмотрены для того, чтобы крепиться к сенсору тока друг напротив друга с помощью всего двух винтов.
У таких известных систем необходимо продевать по меньшей мере два винта с одной стороны через эти крепежные элементы и через проемы под винты в корпусе сенсора тока, а с другой стороны привертывать, например, таким образом, что проемы под винты противоположной стороны имеют соответствующие отверстия под винты, имеющие внутреннюю резьбу, или путем применения соответствующих контргаек, причем эти контргайки предпочтительно могут быть утоплены каждая в одном из проемов под винты. Это утапливание служит, разумеется, для компактности всей системы, однако при монтаже при известных условиях требует определенных ручных усилий. Кроме того, в принципе, при таком винтовом соединении существует опасность, что винты также могут снова ослабляться вследствие продолжительных вибраций, которые происходят, например, при железнодорожном движении. Разумеется, этому можно противодействовать с помощью других средств, таких как, например, применение выполненных в специальной форме подкладных шайб, что, однако, означает дополнительную трудоемкость монтажа.
Поэтому недостатком этого уровня техники является, в частности, относительно большой объем ручного труда при монтаже.
Постановка задачи
Задача изобретения заключается в том, чтобы снизить эту трудоемкость и предложить конструктивную форму крепежного элемента, с помощью которого сенсор тока может крепиться на крепежной поверхности с наименьшими возможными усилиями не только лежа, но и стоя.
Задача решается с помощью крепежного элемента вышеназванного рода посредством признаков отличительной части независимого пункта 1 формулы изобретения.
Существенное преимущество изобретения заключается в том, что крепежный элемент имеет по меньшей мере одно, предпочтительно два стопорных устройства и при этом может крепиться («защелкиваться») на сенсоре тока с приложением лишь минимального ручного усилия. Например, два предлагаемых изобретением крепежных элемента могут своими стопорными устройствами с противоположных сторон вставляться в одни и те же проемы под винты сенсора тока и, в частности, в соответствующем данному проему под винт отверстии под винт своими стопорными устройствами застопориваться друг с другом и так удерживаться на сенсоре тока.
Как удалось показать в ряде сложных испытаний, дополнительное преимущество изобретения заключается в том, что вибрации, которые, например, происходят при железнодорожном движении, не вызывают необратимых изменений этого застопоренного состояния, благодаря чему эти вибрации могут также, следовательно, действовать в течение долгого времени без ухудшения при этом застопоренного состояния крепежных элементов.
Другое дополнительное преимущество заключается в том, что сенсор тока лишь с небольшими усилиями может крепиться на крепежной поверхности в различных ориентациях. В частности, сенсор тока своей стороной подключения контактов, т.е. той стороной, на которой расположены его электрические разъемы или которая по меньшей мере предназначена для расположения на ней этих электрических разъемов, может быть расположен под прямым углом к крепежной поверхности. Но он может быть также ориентирован так, чтобы его сторона подключения контактов была ориентирована параллельно крепежной поверхности и обращена от нее. Таким образом, для измерения тока токовой шины, которая проходит параллельно крепежной поверхности и, естественно, через сердцевинное отверстие сенсора тока, для ориентировки стороны подключения контактов получаются три разных ориентации, которые могут принимать сенсор тока, при этом те варианты, которые получаются вследствие вращения на 180° вокруг оси, проходящей перпендикулярно плоскости крепления, не учтены.
Предпочтительные варианты осуществления изобретения указаны в зависимых пунктах формулы изобретения.
В одном из предпочтительных вариантов осуществления стопорные устройства крепежного элемента представляют собой, с одной стороны, стопорный штырь, а с другой стороны, систему из нескольких, предпочтительно двух или трех, стопорных крыльев. Стопорный штырь и система из нескольких стопорных крыльев имеют предпочтительно застопориваемую друг с другом форму. Это имеет то преимущество, что два аналогичных крепежных элемента обладают возможностью застопоривания друг с другом, при этом соответственно стопорный штырь одного крепежного элемента застопоривается за стопорные крылья соответственно другого крепежного элемента.
Для крепления сенсора тока на крепежной поверхности также предпочтительно, если предпочтительно цельно выполненный крепежный элемент с одной стороны имеет по меньшей мере одну фланцевую область, а с другой стороны по меньшей мере одно стопорное устройство, предпочтительно два стопорных устройства.
Фланцевая область может иметь опорную область для крепления на крепежной поверхности. Эта опорная область может, например, иметь опорную планку и может также иметь по меньшей мере одну, предпочтительно две опорные поверхности. Тем самым обеспечивается большая механическая контактная поверхность с крепежной поверхностью, что способствует стабильности крепления. В каждой из опорных поверхностей может быть расположена крепежная прорезь, например, для привертывания или крепления иным способом к крепежной поверхности. Предпочтительно фланцевая область имеет по меньшей мере одну зажимную поверхность. Опорная планка, опорные поверхности и зажимная поверхность могут примыкать друг к другу и, к тому же, могут быть соединены друг с другом с помощью стабилизирующих средств, например, по меньшей мере одной стабилизирующей поверхности, для стабилизации их взаимного крепления. Например, по две стабилизирующие поверхности могут соединять каждую из двух опорных поверхностей с зажимной поверхностью и при этом предпочтительно проходить перпендикулярно как к опорной поверхности, так и к зажимной поверхности, благодаря чему обеспечена особенно высокая стабильность фланцевой области.
Опорные поверхности и опорная планка каждого крепежного элемента лежат предпочтительно в первой плоскости. Между этой первой плоскостью и второй плоскостью, в которой лежит зажимная поверхность, имеется угол α, который может составлять, например, от 88° до 94°, но предпочтительно от 90° до 92°. Таким образом, угол α может, например, представлять собой прямой угол. Однако для стабильного крепления сенсора тока особенно предпочтительно, если угол α несколько больше 90°. Предпочтительно угол α больше 90,25°. Особенно предпочтительно угол α больше 90,5°. В частности, угол α может быть больше 90,75°, то есть составлять, например, 91° или больше.
В частности, каждое стопорное устройство может состоять из первой удерживающей консоли и отформованного на ней стопорного штыря, а также из второй удерживающей консоли и отформованных на ней стопорных крыльев.
Стопорный штырь может иметь по своему ходу ось симметрии, относительно которой он имеет предпочтительно по меньшей мере зеркально-симметричную конструкцию. Таким образом, по этой оси симметрии его ширина может варьироваться по меньшей мере в одном определенном направлении. Это позволяет получить по меньшей мере в этом направлении либо сужение, т.е. стопорную выемку, и/либо утолщение стопорного штыря, причем оба варианта могут служить для застопоривания, например, между стопорными крыльями другого, аналогичного крепежного элемента. В частности, стопорный штырь может иметь сужение за счет двух противолежащих друг другу стопорных выемок. Кроме того, возможен также один из вариантов осуществления, в котором стопорный штырь с его сужением и/или утолщением имеет даже вращательно-симметричную конструкцию.
На второй удерживающей консоли расположено несколько, предпочтительно два, но возможно также три или больше, стопорных крыла. Этими стопорными крыльями может быть образована открытая в направлении их свободно стоящего конца, конически сужающаяся полость. На своих концах стопорные крылья имеют стопорные выступы. Стопорные выступы могут представлять собой отформованные элементы, и/или стопорные выступы могут быть также, например, образованы за счет того, что стопорные крылья соответственно искривлены в направлении друг друга и в направлении их открытого конца проходят друг к другу.
Эти стопорные выступы предназначены, например, для того, чтобы вставляться в стопорные выемки стопорного штыря, чтобы застопоривать его.
Два таких, в частности аналогичных, крепежных элемента могут быть закреплены друг напротив друга путем взаимного застопоривания на сенсоре тока, чтобы, в свою очередь, крепить его на крепежной поверхности. Сенсор тока имеет предпочтительно четыре проема под винты, причем в каждом из проемов под винты расположено отверстие под винт и, в частности, вокруг каждого из этих отверстий под винты могут быть расположены по меньшей мере три удерживающих элемента. В частности, эти удерживающие элементы могут представлять собой по существу имеющие форму прямоугольного параллелепипеда удерживающие ребра, которые предпочтительно находятся на одинаковом расстоянии от отверстия под винт и идеальным образом расположены на эквидистантных угловых расстояниях вокруг отверстия под винт. С помощью этих удерживающих элементов, в частности удерживающих ребер, могут также удерживаться удерживающие консоли крепежных элементов во вводах под винты.
Оба удерживающих элемента могут быть зафиксированы на сенсоре тока таким образом, что они своими стопорными штырями и стопорными крыльями застопориваются друг с другом в отверстиях под винты.
Как уже упомянуто выше, предпочтительно, если угол α несколько больше 90°, потому что теперь два установленных («защелкнутых») друг напротив друга на сенсоре тока крепежных элемента своими опорными поверхностями привертываются на крепежной поверхности, затем их зажимные поверхности с двух сторон прижимаются к сенсору тока, и так сенсор тока зажимается между этими двумя крепежными элементами.
Одновременно стопорные устройства расположены в проемах под винты сенсора тока. В частности, стопорные штыри и стопорные крылья в отверстии под винт давят на сенсор тока в направлении крепежной поверхности и так способствуют дополнительной стабильности. Кроме того, в этом отношении также предпочтительно, если стопорные устройства крепежного элемента имеют по удерживающей консоли. В конечном итоге эта удерживающая консоль находится в соответствующем проеме под винт сенсора тока и (удерживается?) его удерживающими элементами, в частности удерживающими ребрами, и может дополнительно прижимать сенсор тока к крепежной поверхности в этом месте.
Пример осуществления
Один из примеров осуществления изобретения изображен на чертежах и ниже поясняется подробнее. Показано:
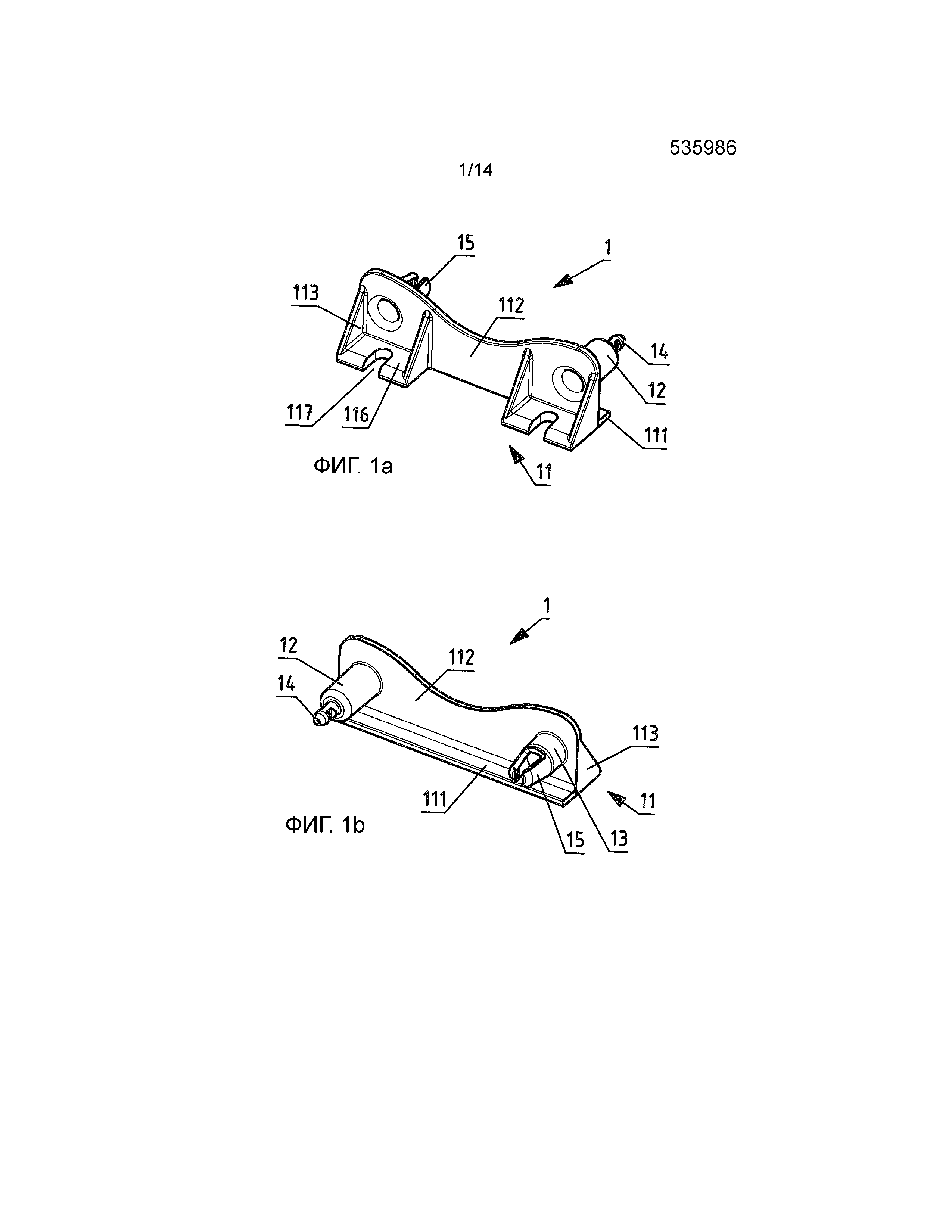
фиг.1a: крепежный элемент на виде наискосок сверху (сторона фланцевой области);
фиг.1b: крепежный элемент на виде наискосок сверху (сторона вставления);
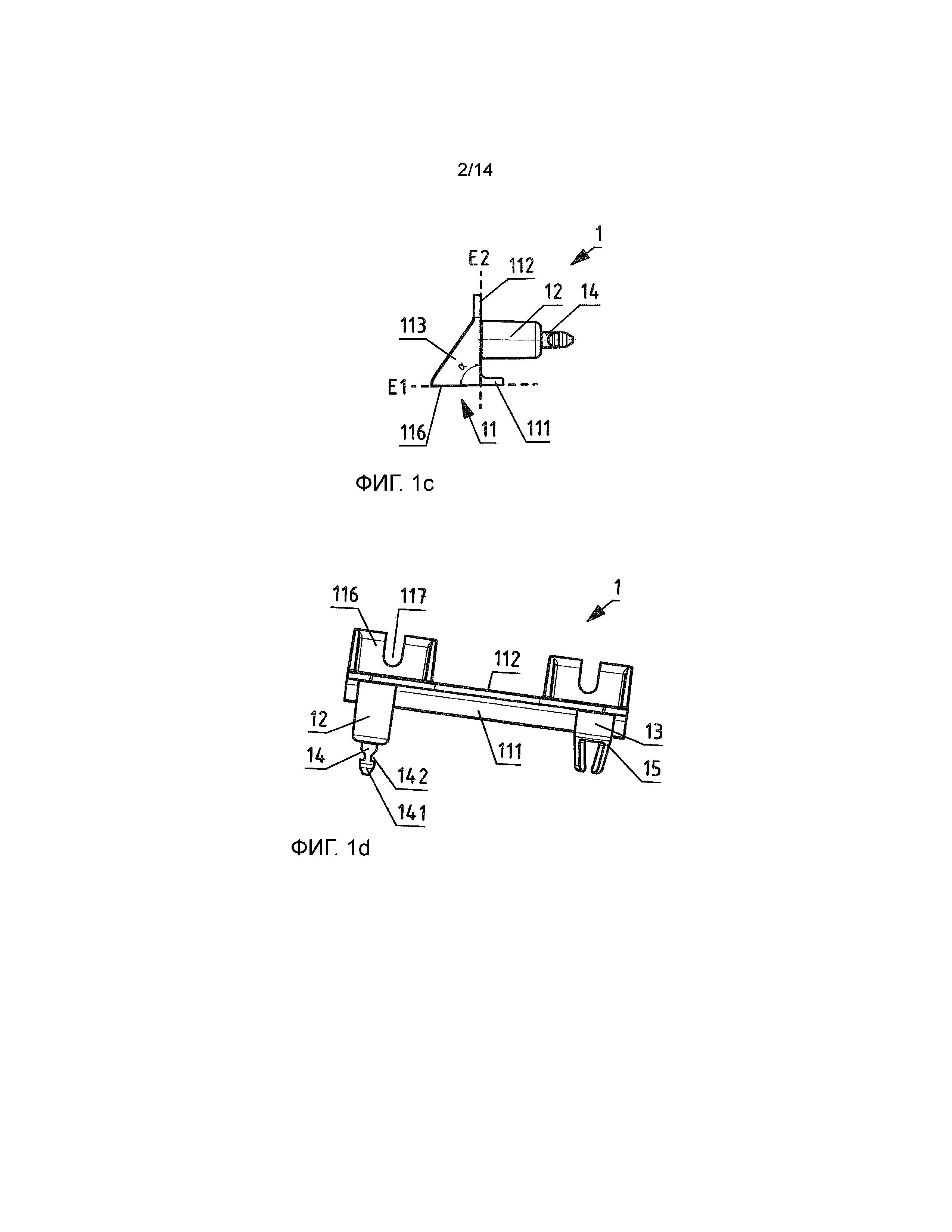
фиг.1c: крепежный элемент сбоку;
фиг.1d: крепежный элемент сверху;
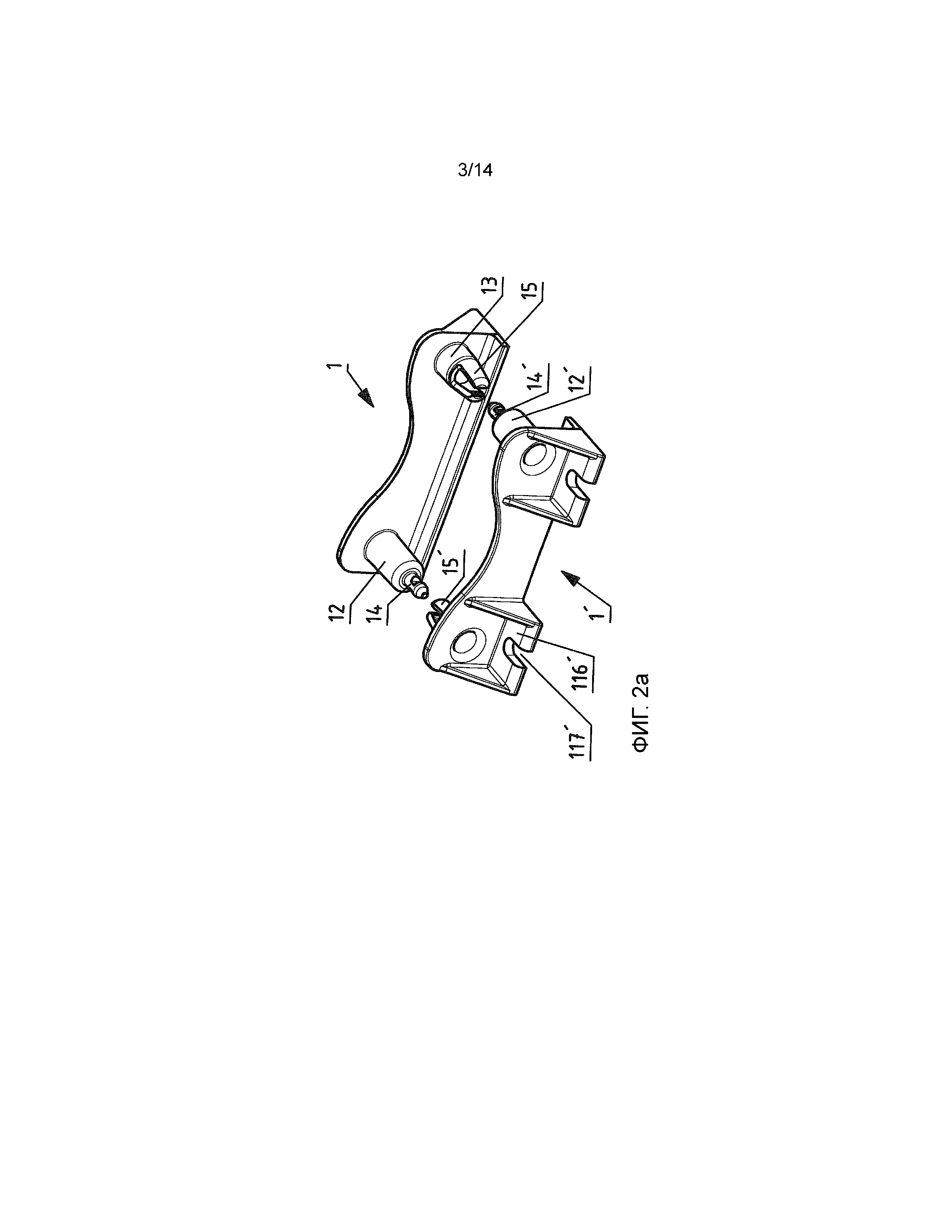
фиг.2a: два крепежных элемента в незастопоренном состоянии на виде наискосок сверху;
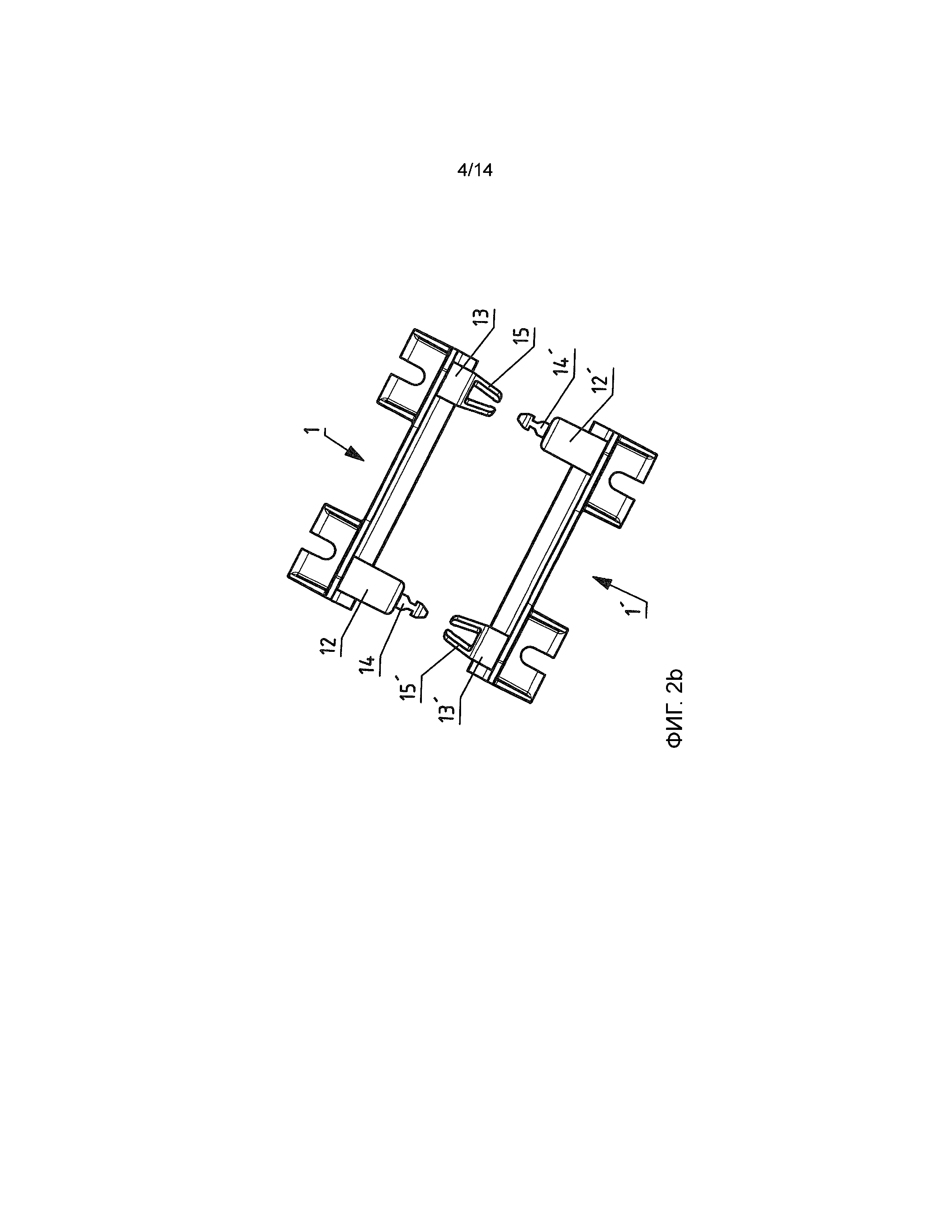
фиг.2b: два крепежных элемента в незастопоренном состоянии сверху;
фиг.2c: стопорный штырь и стопорная выемка в незастопоренном состоянии с увеличением;
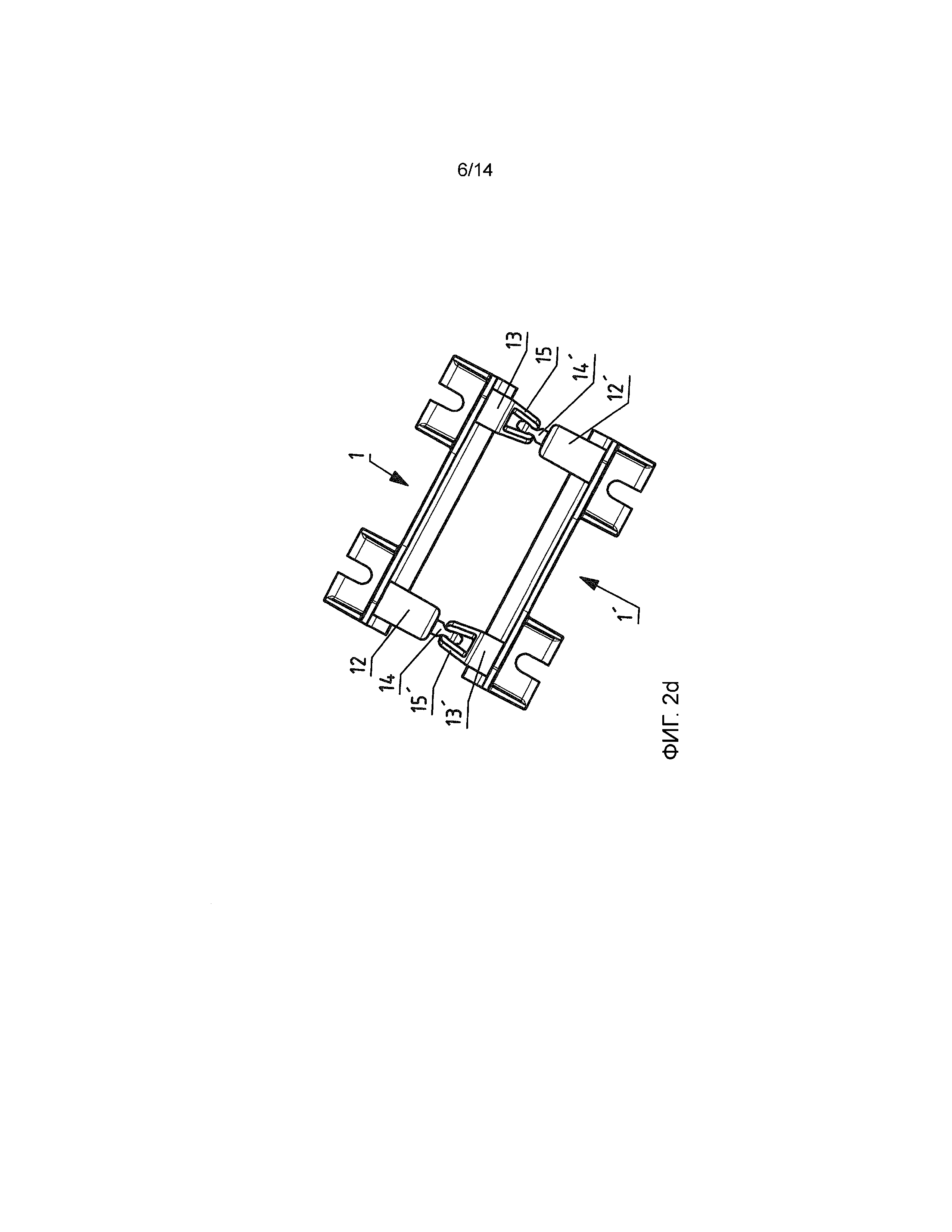
фиг.2d: два застопоренных друг с другом крепежных элемента сверху;
фиг.2e: стопорная выемка и застопоренный в ней стопорный штырь с увеличением;
фиг.3a: закрепляемый сенсор тока;
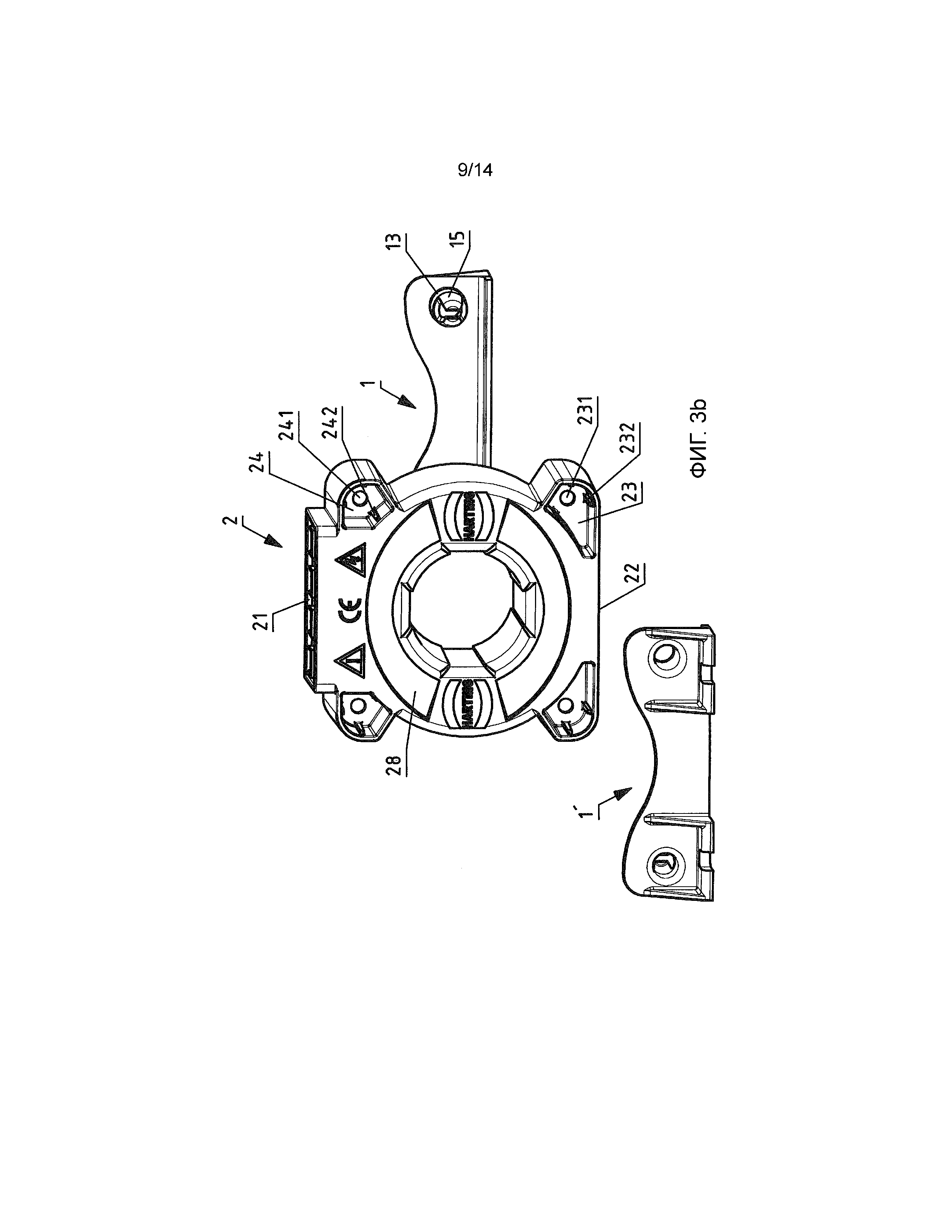
фиг.3b: сенсор тока с двумя незастопоренными крепежными элементами;
фиг.3c: сенсор тока с двумя закрепленными на нем, застопоренными крепежными элементами;
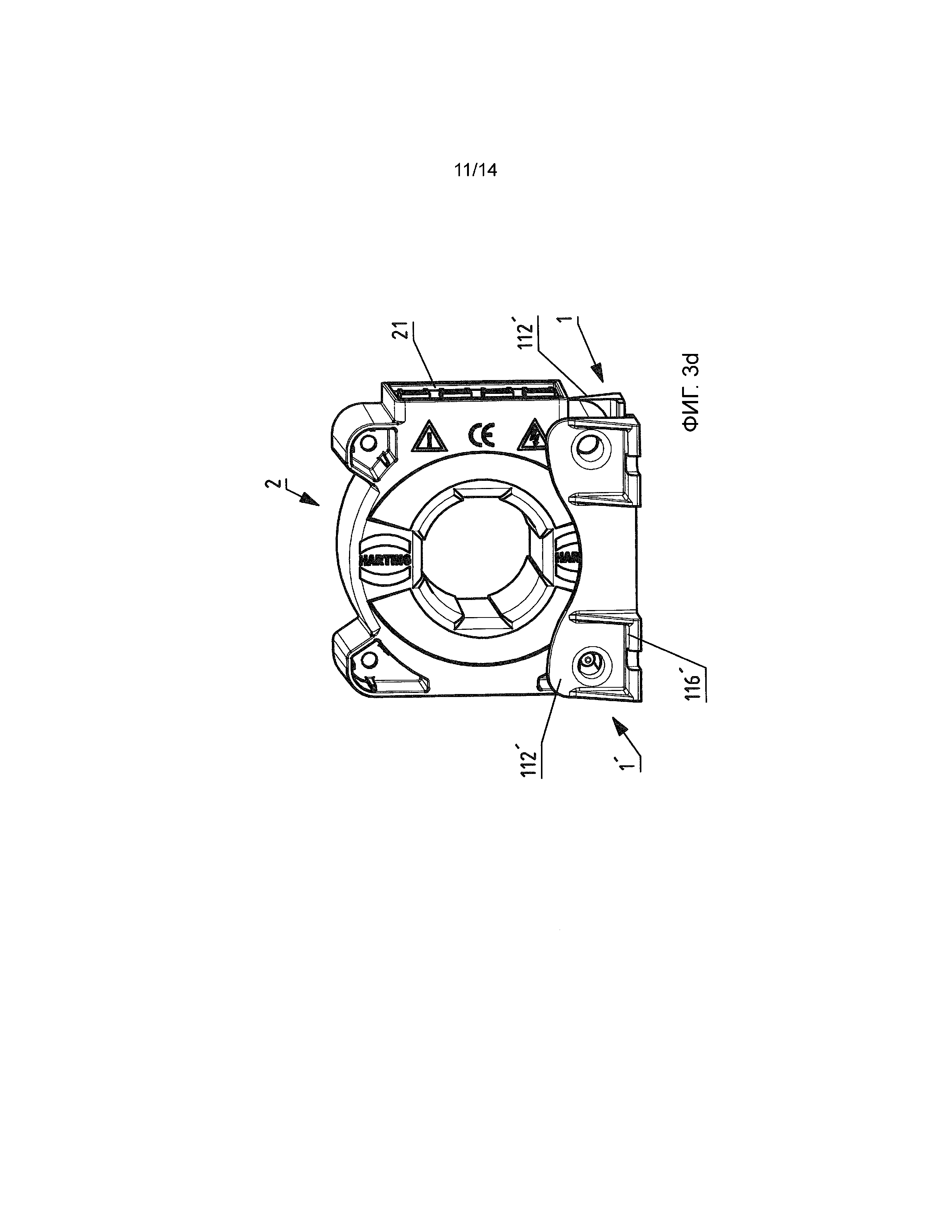
фиг.3d: сенсор тока с двумя закрепленными на нем, застопоренными крепежными элементами во второй ориентации;
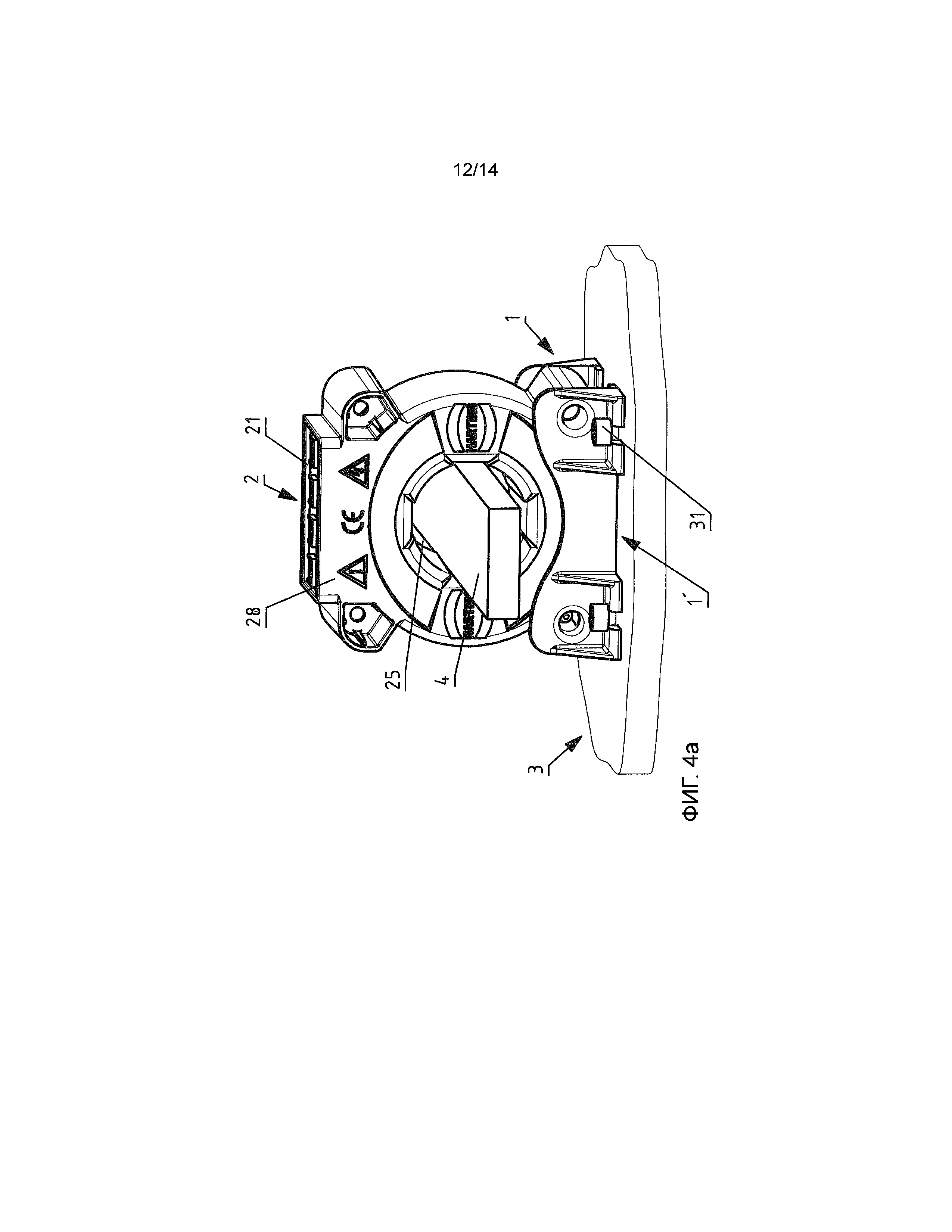
фиг.4a, b, c: сенсор тока с двумя крепежными элементами на крепежной поверхности, с токовой шиной.
На фиг.1 a, b, c и d показан крепежный элемент 1 на разных видах. Этот крепежный элемент имеет фланцевую область 11 и два стопорных устройства, а именно первое стопорное устройство и второе стопорное устройство.
Фланцевая область 11 особенно хорошо видна на фиг.1. Она имеет опорную область для крепления на крепежной поверхности 3. Эта опорная область имеет опорную планку 111, которая, в свою очередь, особенно хорошо видна на фиг.1b, и две опорные поверхности 116. В каждой из этих опорных поверхностей 116 может быть расположена крепежная прорезь 117, например, для привертывания или крепления иным способом к крепежной поверхности 3. Предпочтительно фланцевая область 11 имеет зажимную поверхность 112. Опорная планка 111, обе опорные поверхности 116 и зажимная поверхность 112 примыкают друг к другу и к тому же соединены друг с другом посредством стабилизирующих поверхностей 113 для стабилизации их взаимного крепления. Каждая из двух опорных поверхностей 16 посредством соответственно двух стабилизирующих поверхностей 113 соединена с зажимной поверхностью 112. При этом стабилизирующие поверхности проходят предпочтительно перпендикулярно как к опорным поверхностям 116, так и к зажимной поверхности 112, благодаря чему обеспечена особенно высокая стабильность.
Как следует из фиг.1c, опорные поверхности 116 и опорная планка 111 каждого крепежного элемента 1 лежат в первой плоскости E1. Между этой первой плоскостью E1 и второй плоскостью E2, в которой лежит зажимная поверхность, имеется угол α, который может составлять предпочтительно от 90° до 92°. Таким образом, угол α может, например, представлять собой прямой угол. Однако для стабильного крепления сенсора тока предпочтительно, если угол α несколько больше 90°. Предпочтительно угол α больше 90,25°. Особенно предпочтительно угол α больше 90,5°. В частности, угол α может быть больше 90,75°, то есть составлять, напр., 91° или больше.
Первое стопорное устройство состоит из первой удерживающей консоли 12 и отформованного на ней стопорного штыря 14. Второе стопорное устройство состоит из второй удерживающей консоли 13 и отформованных на ней стопорных крыльев 15.
Стопорный штырь 14 по своему ходу имеет ось симметрии, относительно которой он имеет по существу зеркально-симметричную конструкцию. По этой оси симметрии его ширина сужается в одном определенном направлении, вследствие чего на стопорном штыре 14 с обеих сторон образована стопорная выемка 142.
На второй удерживающей консоли 13 расположено два стопорных крыла 15. Этими стопорными крыльями образована открытая в направлении их свободно стоящего конца, конически сужающаяся полость. На своих концах стопорные крылья 15 имеют стопорные выступы 151, которые особенно хорошо видны на фиг.1d. Стопорные выступы 151 могут представлять собой отформованные элементы, и/или стопорные выступы 151 могут быть также, например, образованы за счет того, что стопорные крылья 151 соответственно искривлены в направлении друг друга и в направлении их открытого конца проходят друг к другу.
Эти стопорные выступы 151 предназначены для того, чтобы вставляться в стопорные выемки 142 стопорного крючка 14, чтобы застопоривать его.
На фиг.2a, b, c, d, e показаны два таких противолежащих крепежных элемента 1, 1' в незастопоренном или, соответственно, в застопоренном состоянии.
На фиг.2a эти два крепежных элемента 1, 1' показаны в 3-мерном изображении, при этом очевидно, что каждый стопорный крючок 14, 14' предусмотрен для того, чтобы застопориваться между стопорными крыльями 15, 15', соответственно, другого крепежного элемента 1, 1'.
На фиг.2b и 2c изображены два крепежных элемента 1, 1' в незастопоренном состоянии на виде сверху. В частности, из изображения на фиг.1c хорошо видно, как отформованный на первой удерживающей консоли 12' стопорный штырь 14' своими двумя стопорными выемками 142' и образованным ими стопорным крючком 141' обладает возможностью, застопориваться за стопорные крылья 15 с их стопорными выступами 151. Стопорные крылья 15 отформованы на второй удерживающей консоли 13 и образуют полость 152, конически сходящуюся в направлении их свободно стоящих концов.
На фиг.2d и 2e показаны два крепежных элемента 1, 1' в застопоренном состоянии. В частности, из фиг.2e следует, как стопорный штырь 14' введен в полость 152 и как стопорные выступы 151 стопорных крыльев 15 вставляются в расположенные с обеих сторон стопорные выемки 142' стопорного штыря 14', чтобы застопоривать его стопорный крючок 141' в полости 152.
На фиг.3a показан соответствующий сенсор 2 тока, имеющий сторону 21 подключения контактов и противоположную ей вторую сторону 22, а также третью сторону 26 и четвертую сторону 27. Под прямым углом к ним сенсор тока имеет, разумеется, видимую на чертеже переднюю сторону 28 и скрытую на чертеже заднюю сторону. Сенсор тока имеет центральное сердцевинное отверстие 25, которое предусмотрено, например, для насаживания сенсора тока на токовую шину. Сенсор 2 тока имеет на своих углах четыре проема 23, 24 под винты, при этом в каждом из проемов 23, 24 под винты расположено отверстие 231, 241 под винт и, в частности, вокруг каждого из этих отверстий под винты расположены три имеющих форму прямоугольного параллелепипеда удерживающих ребра 232, 242, которые предпочтительно находятся на одинаковом расстоянии от соответствующего отверстия 231, 241 под винт и идеальным образом расположены на эквидистантных угловых расстояниях вокруг отверстия 231, 241 под винт. С помощью этих удерживающих ребер 232, 242 удерживающие консоли крепежных элементов могут удерживаться во вводах 23, 24 под винты.
На фиг.3b изображен сенсор 2 тока с двумя застопориваемыми на нем крепежными элементами 1, 1'.
На фиг.3c эти два удерживающих элемента 1, 1' зафиксированы на сенсоре 2 тока за счет того, что они своими стопорными устройствами стопорятся друг с другом в проемах 23 под винты, находящихся на плоской стороне 22. Путем привертывания опорной поверхности 116 крепежных элементов 1, 1' на крепежной поверхности 3 сенсор 2 тока также крепится на крепежной поверхности 3.
Как уже упомянуто выше, при этом предпочтительно, если изображенный на фиг.1c угол α несколько больше 90°. Когда оба крепежных элемента 1, 1' своими опорными поверхностями 116, 116' привертываются на ровную крепежную поверхность 3, то их зажимные поверхности 112, 112' с двух сторон прижимаются к сенсору тока, и так сенсор 2 тока зажимается между этими двумя крепежными элементами 1, 1'.
Одновременно стопорные устройства двух крепежных элементов 1, 1' расположены в проемах 23 под винты сенсора тока. При этом стопорные штыри 14, 14' и стопорные крылья 15, 15' в отверстиях 23, 24 под винты давят на сенсор 2 тока в направлении крепежной поверхности 3 и так способствуют дополнительной стабильности. Кроме того, каждая удерживающая консоль 12, 12', 13, 13' может удерживаться в соответствующем проеме 23 под винт удерживающими ребрами 232 и тогда дополнительно прижимает сенсор 2 тока к крепежной поверхности 3.
На фиг.3c показана сравнимая система, у которой, однако, эти два удерживающих элемента введены каждый одним стопорным устройством в проем 23 под винт, который находится на плоской стороне 22 сенсора 2 тока, а соответственно другим стопорным устройством - в проем 24 под винт, который находится на контактной стороне 21 сенсора 2 тока. Таким образом сенсор 2 тока может в разных ориентациях крепиться на крепежной поверхности 3.
На фиг.4a, b, c изображены разные возможные ориентации сенсора тока, закрепленного на крепежной поверхности 3. При этом застопоренные друг с другом в сенсоре тока, как указывалось, крепежные элементы 1, 1' своими опорными поверхностями привернуты на крепежной поверхности 3 с помощью крепежных винтов 31. Благодаря этому сенсор 2 тока может зажиматься между их зажимными поверхностями 112, 112'.
Одновременно, как уже описано, стопорные устройства расположены в проемах 23, 24 под винты сенсора 2 тока. При этом стопорные штыри 14, 14' и стопорные крылья 15, 15' в отверстиях 231, 241 под винты давят на сенсор 2 тока в направлении крепежной поверхности 3 и так способствуют дополнительной стабильности. Кроме того, каждая удерживающая консоль 12, 12', 13, 13' в соответствующем проеме 23, 24 под винт может удерживаться соответствующими удерживающими ребрами 232, 242 и дополнительно прижимает сенсор 2 тока к крепежной поверхности 3.
Кроме того, изображена проходящая параллельно крепежной поверхности 3 токовая шина 4, которая проходит через сердцевинное отверстие 25 сенсора 2 тока и под прямым углом к его передней стороне 28.
На фиг.4a показан сенсор тока, который установлен своей плоской стороной 22 с помощью двух крепежных элементов 1, 1', на крепежной поверхности 3, так что его сторона 21 подключения контактов ориентирована параллельно крепежной поверхности 3 и ориентирована, будучи обращена от нее.
На фиг.4b и 4c показан сенсор тока, который своей третьей стороной 26 или, соответственно, своей четвертой стороной 27 с помощью двух крепежных элементов 1, 1' установлен на крепежной поверхности 3 так, что его сторона 21 подключения контактов ориентирована в каждом случае под прямым углом к крепежной поверхности 3.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1, 1' Крепежный элемент
11, 11' Фланцевая область
111 Опорная планка
112, 112' Зажимная поверхность
113 Стабилизирующая поверхность
116, 116' Опорная поверхность
117, 117' Крепежная прорезь
12, 12' Первая удерживающая консоль
13, 13' Вторая удерживающая консоль
14, 14' Стопорный штырь
141, 141' Стопорный крючок
142, 142' Стопорная выемка
15, 15' Стопорное крыло
151 Стопорный выступ
152 Полость
2 Сенсор тока
21 Сторона подключения контактов
22 Вторая сторона
23, 24 Проемы под винты
231, 241 Отверстие под винт
232, 242 Удерживающие ребра
25 Сердцевинное отверстие
26, 27 Третья, четвертая сторона
28 Передняя сторона
3 Крепежная поверхность
31 Крепежный винт
4 Токовая шина
E1, E2 Первая, вторая плоскость
Реферат
Изобретение относится к крепежному элементу для сенсора тока и направлено на сокращение ручного труда при монтаже. Крепежный элемент имеет стопорное устройство, а также фланцевую область для крепления сенсора тока в вертикальном положении на крепежной поверхности. Фланцевая область имеет опорную поверхность и/или опорную планку, которые лежат в первой плоскости, крепежный элемент имеет также зажимную поверхность, на которой отформовано стопорное устройство. Зажимная поверхность лежит во второй плоскости, и при этом эти две плоскости имеют общий угол (α) пересечения, который составляет больше 90,25°. 2 н. и 13 з.п. ф-лы, 16 ил.
Комментарии