Способ измерения тока и устройство для измерения тока - RU2727565C1
Код документа: RU2727565C1
Чертежи

Описание
Изобретение касается способа измерения тока посредством устройства для измерения тока.
Устройства для измерения тока, называемые также датчиками тока, применяются для измерения или, соответственно, определения токов в определенных местах внутри электрических установок. При этом рассматривается система датчиков для устройства измерения тока и соответствующий способ аналитической обработки, которые обеспечивают возможность энергоэффективного измерения токов от 400 А до 10 кА без концентратора потока (цепи потока). Эта система датчиков обходится без ферромагнитной цепи и обеспечивает возможность улучшенной по сравнению с уровнем техники чувствительности к помехам в отношении полей параллельных проводников помех, которые обычно имеются в трехфазной системе переменного тока. Такие датчики тока могут находить применение в преобразователях для низкого и среднего напряжения или при контроле батарей. Прежде всего, преобразователи для судовых и железнодорожных приводов или ветроэнергетических установок работают в этом диапазоне тока и часто конструируются столь компактно, что в месте измерения тока обычно имеются высокие посторонние поля, а также наложенные собственные поля (обратная связь токоведущей шины). Вследствие этого режима работы «open loop» (англ. разомкнутый контур) диапазон измерения системы датчиков ограничивается диапазоном измерения отдельного датчика. Помимо этого, датчики магнитного поля, которые имеют необходимый для максимальных полей диапазон измерения (прибл. 50 мТ), имеют относительно большую погрешность смещения значительно больше 1% максимального значения. В этом диапазоне поля работают почти исключительно датчики Холла, которые известны своей погрешностью смещения. Так как погрешность смещения отдельных датчиков изменяется с температурой и в течение времени, дополнительная аналоговая или цифровая стабилизация смещения затруднительна.
До сих пор ток измеряется, например, с помощью шунтовых сопротивлений, преобразователей с кольцевым сердечником или отдельных датчиков поля (зонд Холла или ГМС–датчик (англ. GMR, Giant magnetoresistance, гигантское магнитосопротивление)). У известных до сих пор измерительных конструкций сравнительно большая ошибка смещения и связанная с ней низкая точность при малых токах считается приемлемой. При этом следует упомянуть, что простая непосредственная компенсация наблюдаемой ошибки смещения из–за ее не детерминированной временной характеристики и сильно нелинейной температурной характеристики возможна только с трудом. Диапазон измерения системы датчиков получался из диапазона измерения имеющихся отдельных датчиков. Так как имеющиеся датчики по технологии Холла при диапазоне измерения прибл. 25 мТ и больше обеспечивают возможность очень хорошей точности, а имеющаяся альтернативно ей MR–технология допускает только датчики, имеющие диапазон измерения до 1 мТ, долго существовал большой пробел в диапазоне измерения для датчиков магнитного поля «Chip–scale». Помимо этого, при полях больше прибл. 20 мТ MR–датчики декалибровались бы в такой степени, которая значительно ухудшает точность.
В основе изобретения лежит задача, предложить устройство для измерения тока, которое позволит получить более высокую точность при измерении тока.
Эта задача решается с помощью способа измерения тока посредством устройства для измерения тока, причем это устройство для измерения тока имеет по меньшей мере два датчика первого типа, по меньшей мере два датчика второго типа, при этом датчики первого типа представляют собой датчики поля Flux–Gate, а датчики второго типа датчики Холла, при этом датчики первого типа имеют более высокую чувствительность, чем датчики второго типа, при этом первые датчики расположены радиально–симметрично на первой окружной траектории, в частности эллипсе или первой круговой траектории, а вторые датчики радиально–симметрично на второй окружной траектории, в частности эллипсе или второй круговой траектории, при этом каждый датчик первого типа расположен рядом с датчиком второго типа, при этом для определения силы тока, в случае если измеряемые значения по меньшей мере двух датчиков первого типа лежат в пределах диапазона измерения, анализируется по меньшей мере один из датчиков первого типа, а в ином случае анализируется по меньшей мере один датчик второго типа.
Другие предпочтительные варианты осуществления изобретения указаны в зависимых пунктах формулы изобретения.
В основе изобретения лежит тот обнаруженный факт, что точность измерения кольцевой системы отдельных датчиков улучшается за счет того, что датчики различного типа располагаются каждый в месте измерения или, соответственно, местах измерения так, что они, во–первых, находятся по возможности в непосредственной близости друг к другу, а во–вторых, все датчики одного типа образуют самостоятельную, по возможности радиально–симметричную измерительную систему. При этом два датчика различного типа расположены в месте измерения рядом друг с другом. Это означает, что расстояние между ними меньше протяженности одного из датчиков. Наряду с улучшением точности измерения, с помощью этой системы может, к тому же, расширяться диапазон измерения. При этом датчики различного типа могут быть расположены рядом тангенциально или радиально.
Под чувствительностью, называемой также разрешением, понимают свойство, иметь возможность регистрировать изменение измеряемого значения. Чем выше чувствительность, тем меньшие изменения измеряемой величины могут при этом регистрироваться.
Расширение диапазона измерения, а также повышение точности измерения с помощью устройства для измерения тока могут достигаться с помощью способа измерения тока. При этом эти преимущества могут достигаться благодаря предпочтительному методу переключения между датчиками различного типа. Путем исследований на базе реальных данных измерения, с учетом помех от других токоведущих проводников, удалось показать, что переключение датчиков по типам в значительной степени превосходит все другие методы. Переключение датчиков по типам осуществляется таким образом, что все датчики первого типа, имеющие высокую чувствительность, применяются для расчета значения тока всегда, когда несколько датчиков, т.е. по меньшей мере два датчика, первого типа дают каждый индивидуальные действительные значения в пределах их диапазона измерения. Причем этими индивидуальными действительными измеряемыми значениями являются те, которые лежат в пределах допустимого диапазона измерения датчика. В ином случае для расчета значения тока всегда применяются датчики второго типа. Это значит, когда по меньшей мере два датчика первого типа одновременно находятся в пределах их диапазона измерения магнитного поля, для расчета тока применяются сигналы датчиков первого типа, в ином случае для расчета тока применяются сигналы датчиков второго типа.
При этом датчики первого типа и второго типа образуют соответственно две концентрические кольцевые системы датчиков, имеющие параллельную ориентацию чувствительного к полю направления. Однако при перерегулировании одного отдельного датчика переключения по датчикам не происходит. Чтобы достичь хороших результатов измерения, производится переключение по типам. Преимущества этого способа заключаются в расширении диапазона измерения, общем повышении точности и возможном уменьшении погрешности смещения.
Датчики первого типа представляют собой датчики поля Flux–Gate, а датчики второго типа датчики Холла. Эти датчики доступны на рынке и недороги. Помимо этого, их конструктивный размер соответственно мал, так что они могут простым образом интегрироваться в измерительное устройство.
Специалисту известно, как, например, описано в свободно доступной энциклопедии Википедия, что диапазон измерения представляет собой тот диапазон измеряемой величины, в которой отклонения измерения остаются в установленных пределах. Эти установленные пределы погрешности действительны только в определенном диапазоне измерения. Вне этого диапазона измерения гарантий точности нет. Также у датчиков поля Flux–Gate и датчиков Холла диапазон измерения указан в техническом паспорте.
В одном из предпочтительных вариантов осуществления изобретения датчики первого типа имеют в 5–20 раз более высокую чувствительность, чем датчики второго типа. Оказалось, что при этом может достигаться особенно низкая погрешность смещения. Если чувствительность датчиков первого типа в 5–20 раз больше по сравнению с датчиками второго типа, на практике может достигаться очень малая погрешность смещения применительно к данному диапазону измерения. При этом диапазоны измерения отдельных датчиков различных типов могут целесообразным образом распределяться так, чтобы погрешность измерения оставалась низкой.
В другом предпочтительном варианте осуществления изобретения для определения силы тока, в случае если измеряемые значения всех датчиков лежат в пределах диапазона измерения, анализируется по меньшей мере один из датчиков первого типа, а в ином случае анализируется по меньшей мере один из датчиков второго типа.
Это означает, что как только измеряемое значение одного из датчиков первого типа выходит из своего диапазона измерения, ток рассчитывается по меньшей мере по одному датчику второго типа, в частности по взвешенной сумме датчиков второго типа. Только когда измеряемые значения всех датчиков первого типа принадлежат к действительному диапазону, значение тока рассчитывается по меньшей мере по одному из датчиков первого типа, в частности по взвешенной сумме датчиков первого типа. При этом все датчики вносят вклад в улучшенное определение тока, и измеряемое значение может определяться с особенно высокой точностью.
В другом предпочтительном варианте осуществления изобретения во время определения силы тока по датчикам первого типа корректировочное значение смещения датчиков второго типа находится в зависимости от измеряемых значений датчиков второго типа, в частности дополнительно в зависимости от определенной датчиками первого типа силы тока. Если в данном случае действительное значение тока рассчитывается по датчикам первого типа, параллельно этому при некоем вспомогательном расчете рассчитывается также ток датчиков второго типа. При этом расчет в том и другом и в одном из этих случаев может осуществляться по взвешенной сумме измеряемых значений отдельных датчиков. Затем отсюда находится текущее корректировочное значение смещения системы датчиков второго типа. При этом ток, измеренный датчиками второго типа, определяется как

Отсюда отдельное значение корректировочного коэффициента получается как

Предпочтительным образом нахождение корректировочного значение смещения системы датчиков второго типа
Далее изобретение описывается подробнее и поясняется на примерах осуществления, изображенных на фигурах. Показано:
фиг.1: первый пример осуществления устройства для измерения тока;
фиг.2: второй пример осуществления устройства для измерения тока и
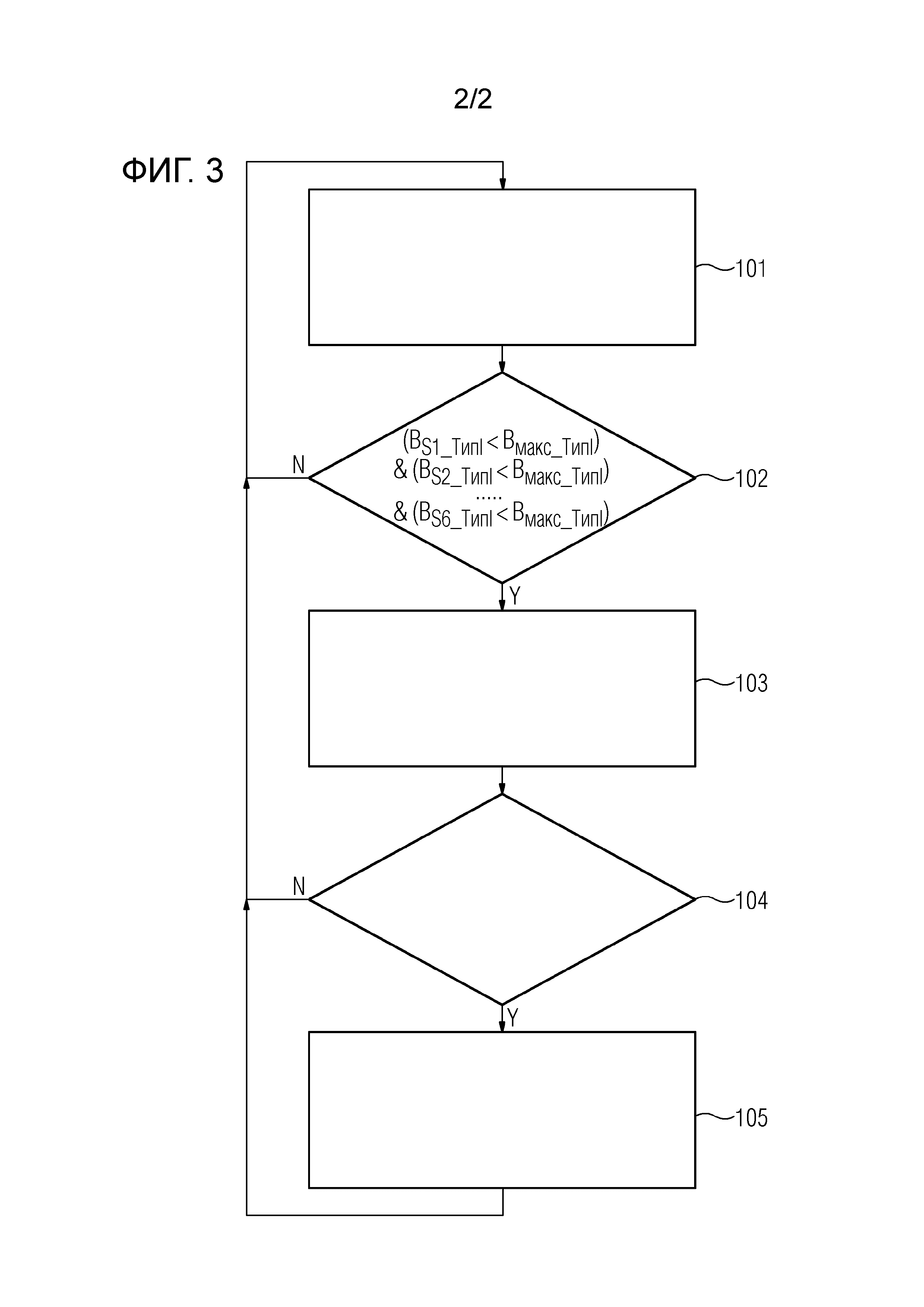
фиг.3: одна из возможных реализаций способа корректировки смещения.
На фиг.1 показан первый пример осуществления устройства 1 для измерения тока вокруг электрического проводника 2. При этом устройство 1 для измерения тока имеет множество датчиков 11 первого типа и рядом с каждым из них множество датчиков 12 второго типа. «Рядом» в этом примере осуществления означает, что расстояние между двумя датчиками меньше, чем наименьшая протяженность датчиков. Причем эти типы отличаются, например, своими принципами измерения. Датчики различного типа расположены на одной общей круговой траектории K. При этом расположение осуществляется таким образом, что изменяемая каждым датчиком ориентация 20 поля ориентирована тангенциально к круговой траектории. Чтобы можно было анализировать сигналы измерения отдельных датчиков, устройство 1 для измерения тока имеет электронику 13 для аналитической обработки. Чтобы простым образом расположить измерительное устройство 1 вокруг электрического проводника, оказалось предпочтительным предусмотреть в круговой конструкции устройства 1 для измерения тока отверстие 21 в форме угла. Чем более гибким является устройство 1 для измерения тока, чем меньше может быть выполнено отверстие 21 в форме угла.
На фиг.2 показан другой пример осуществления устройства 1 для измерения тока. Во избежание повторов ссылаемся на описание к фиг.1 и на введенные там ссылочные обозначения. В этом примере осуществления датчики различных типов расположены рядом соответственно на различных, концентрических круговых траекториях K1, K2. «Рядом» в этом примере осуществления означает, что расстояние между двумя датчиками меньше, чем наименьшая протяженность датчиков. С помощью этой системы также может достигаться сравнимо хороший результат измерения, как и в конструкции примера осуществления, поясненного выше.
На фиг.3 показана блок–схема одного из предпочтительных способов измерения для корректировки смещения. В первом шаге 101 осуществляется измерение тока датчиками первого и второго типа. При решении 102 проверяется, все ли измеряемые значения датчиков первого типа находятся в разрешенном диапазоне измерения. Если это не так, по пути N (no, нет) происходит возврат к первому шагу 101, и снимаются новые измеряемые значения. В другом случае Y (yes, да), когда измеряемые значения датчиков первого типа лежат уже в разрешенном диапазоне, из значений датчиков 12 второго типа в шаге 103 определяется смещение KoffB. Только при достижении наименьшего количества значений KoffB в шаге 105 устанавливается значение смещения для датчиков второго типа. В ином случае решение 104 служит для того, чтобы в шаге 101 снова продолжалось определение новых измеряемых значений.
Итак, изобретение касается устройства для измерения тока. Для улучшения точности измерения предлагается, чтобы устройство для измерения тока имело по меньшей мере два датчика первого типа и по меньшей мере два датчика второго типа, при этом датчики первого типа имеют более высокую чувствительность, чем датчики второго типа, при этом первые датчики расположены радиально–симметрично на первой окружной траектории, а вторые датчики радиально–симметрично на второй окружной траектории, при этом каждый датчик первого типа расположен рядом с датчиком второго типа. Также изобретение касается способа измерения тока посредством такого устройства для измерения тока, при этом для определения силы тока, в случае если измеряемые значения по меньшей мере двух датчиков первого типа лежат в пределах диапазона измерения, анализируется по меньшей мере один из датчиков первого типа, а в ином случае анализируется по меньшей мере один датчик второго типа.
Реферат
Изобретение касается способа измерения тока посредством устройства для измерения тока, причем это устройство (1) для измерения тока имеет по меньшей мере два датчика (11) первого типа и по меньшей мере два датчика (12) второго типа. Для улучшения точности измерения предлагается, чтобы датчики (11) первого типа представляли собой датчики поля Flux–Gate, а датчики (12) второго типа датчики Холла, при этом датчики (11) первого типа имеют более высокую чувствительность, чем датчики (12) второго типа, при этом первые датчики (11) расположены радиально–симметрично на первой окружной траектории, в частности эллипсе или первой круговой траектории (K), а вторые датчики (12) радиально–симметрично на второй окружной траектории, в частности эллипсе или второй круговой траектории (K), при этом каждый датчик (11) первого типа расположен рядом с датчиком (12) второго типа, при этом для определения силы тока, в случае если измеряемые значения по меньшей мере двух датчиков (11) первого типа лежат в пределах диапазона измерения, анализируется по меньшей мере один из датчиков (11) первого типа, а в ином случае анализируется по меньшей мере один датчик (12) второго типа. 2 з.п. ф-лы, 3 ил.
Комментарии