Радиовысотомер малых высот с частотной модуляцией - RU187716U1
Код документа: RU187716U1
Чертежи

Описание
Предлагаемая полезная модель относится к радиолокации и может быть применена в качестве радиовысотомера (РВ) для летательных объектов или в качестве дальномера, работающего по близко расположенным целям.
Совокупность признаков, описанная формулой полезной модели, в известных и доступных литературных и электронных источниках не выявлена.
В настоящее время часто требуется, чтобы РВ выполнялся в виде моноблока, включающего в себя излучающую и приемную антенны, в то же, время в силу функционального назначения и по условиям размещения на борту объекта (вертолета), РВ должен быть размещен в нижней области фюзеляжа вертолета, при этом минимальная высота антенн РВ при стоянке объекта и его посадке оказывается равной 0,3 м и менее; внутренняя временная задержка приемопередающего тракта РВ в совокупности с малой высотой размещения антенн РВ над уровнем земной поверхности, оказывается очень малой, что затрудняет работу РВ на стоянке объекта и при полете на сверхмалой высоте.
Для обеспечения работы РВ при стоянке объекта и малой высоте полета внутреннюю электрическую длину антенно-фидерного тракта РВ увеличивают путем включения дополнительного высокочастотного кабеля необходимой длины, что приводит к увеличению массы РВ и, как результат, к ухудшению характеристик объекта.
Целью заявляемой полезной модели бортового РВ малых высот с частотной модуляцией является обеспечение работы РВ с укороченным антенно-фидерным трактом на сверхмалой высоте полета объекта.
Поставленная цель достигается тем, что в радиовысотомер с частотной модуляцией [1] дополнительно включаются последовательно соединенные умножитель частоты преобразованного сигнала и частотный (периодный) дискриминатор, при этом вход умножителя частоты подключен к выходу усилителя-ограничителя, а выходы частотных (периодных) дискриминаторов соединены со входом устройства поиска-слежения через переключатель, вход управления которого соединен с выходом схемы сравнения с заранее установленным порогом по первому входу и второй вход схемы сравнения соединен с выходом устройства поиска-слежения.
Сущность предлагаемой полезной модели поясняется фиг.урами 1-3, на которых изображено:
- на фиг. 1 представлена функциональная схема известного прототипа РВ [1] с частотной модуляцией,
- на фиг. 2 представлена функциональная схема полезной модели,
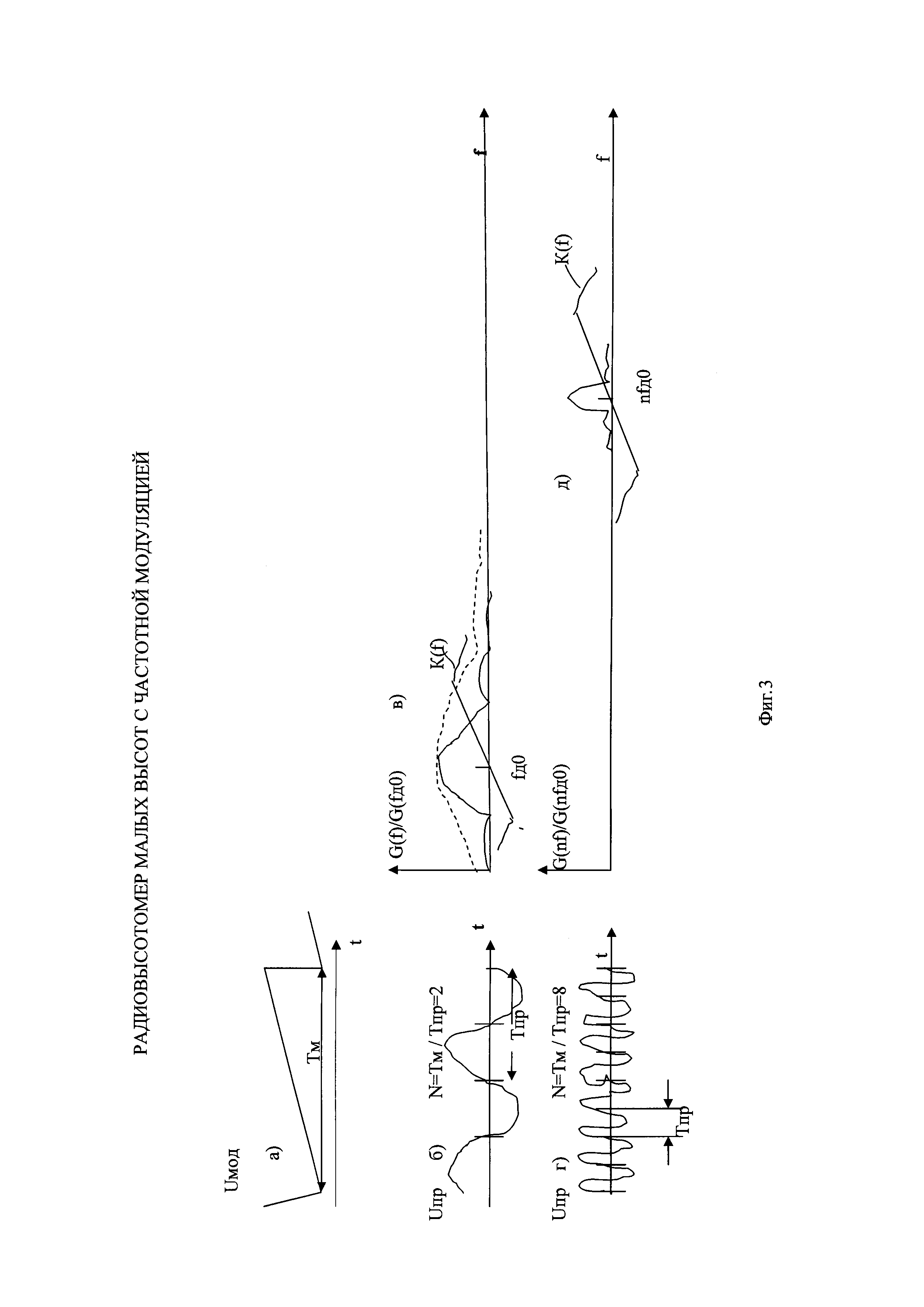
- на фиг. 3 представлены эпюры, поясняющие работу полезной модели:
- фиг. 3а - напряжение модуляции Uмод с периодом Тм,
- фиг. 3б - напряжение преобразованного сигнала Uпp с периодом Тпр, при этом
Тм/Тпр=N=2,
- фиг. 3в - график огибающей спектральной плотности преобразованного сигнала, соответствующей сигналу фиг. 4б (N=2),
- фиг. 3г - напряжение преобразованного сигнала Uпp с периодом Тпр, при этом
Тм/Тпр - N=8,
- фиг. 3д - график огибающей спектральной плотности преобразованного сигнала, соответствующей сигналу фиг. 4 г (N=8).
Кроме того, на фиг. 1-2 обозначено цифрами:
1 - земная поверхность, отражающая радиосигнал,
2 - фюзеляж летательного объекта (например, вертолета),
3 - антенны РВ,
4 - генератор сверхвысоких частот (СВЧ) с частотной модуляцией (ЧМ),
5 - модулятор частоты генератора СВЧ,
6 - приемник,
7 - усилитель-ограничитель,
8 - первый частотный (периодный) дискриминатор,
9 - устройство поиска-слежения,
10 - интегратор,
11 - нелинейный усилитель (экспоненциальное звено),
12 - обнаружитель,
13 - электронный ключ,
14 - измеритель периода модуляции (или измерительного интервала - период модуляции за исключением времени обратного хода модуляции),
15 - умножитель частоты преобразованного сигнала в n раз,
16 - второй частотный (периодный) дискриминатор,
17 - электронный переключатель,
18 - схема сравнения.
Известен РВ [1], работающий при непрерывном излучении частотно-модулированных радиоволн, в котором часть излучаемого сигнала смешивается (перемножается) с отраженным сигналом, при этом средняя частота преобразованного сигнала поддерживается постоянной и равной переходной частоте частотного (периодного) дискриминатора автоматической подстройкой скорости изменения частоты СВЧ генератора, что, при постоянстве полосы частотной модуляции, приводит к изменению периода частотной модуляции; период модуляции при этом является мерой высоты:

где: Тм=1/Fм- период частотной модуляции,
Fм - частота модуляции,
к=2 - для несимметричной линейной модуляции, к=4 - для симметричной модуляции,
ΔF - полоса частотной модуляции,
с - скорость распространения радиоволн,
fд0 - переходная частота частотного (периодного) дискриминатора,
tд0=1/fд0 - период преобразованного сигнала, соответствующий переходной частоте дискриминатора,
Н - высота полета объекта.
Работа известного радиовысотомера поясняется фиг. 1.
Генератор 4 СВЧ с модуляцией частоты по линейному, предпочтительно, несимметричному возрастающему закону, производимому модулятором 5, выполненному любым известным образом, излучает зондирующий сигнал по направлению к земной поверхности 1 через излучающую антенну 3, установленную в нижней части фюзеляжа 2, например, вертолета.
Сигнал, отраженный от земной поверхности 1, через приемную антенну 3, аналогичной излучающей антенне 3, поступает на вход приемника 6, выполненного любым известным образом, на второй вход которого поступает гетеродинный сигнал со второго выхода генератора 4. Гетеродинный сигнал является точной копией зондирующего сигнала, но меньшей мощности.
С выхода приемника 6 низкочастотный преобразованный сигнал, являющийся результатом перемножения (смешения) гетеродинного и отраженного сигналов, поступает на усилитель-ограничитель 7, выходной сигнал которого поступает на вход частотного (периодного) дискриминатора 8, переходная частота fд0 которого заранее выбрана постоянной и стабильной, его выход соединен с устройством 9 поиска-слежения, включающего в себя, например, последовательно включенные интегратор 10 и нелинейный усилитель 11. Выход нелинейного усилителя 11 непосредственно соединен со входом модулятора 5, второй выход которого соединен с измерителем периода (или его части - измерительного интервала, равного периоду модуляции за вычетом обратного хода закона модуляции), с выхода которого снимается информация о высоте объекта.
Выход приемника 6 дополнительно соединен со входом обнаружителя 12, выход которого соединен со входом ключа 13 и этот вход является входом управления устройства 9 поиска-слежения.
Радиовысотомер в полете имеет два режима работы:
- режим поиска происходит при отсутствии сигнала с выхода приемника 6; в этом режиме выходной сигнал обнаружителя 12 замыкает ключ 13 и последовательно соединенные интегратор 10 и нелинейный усилитель 11 и ключ 13 являются генератором низкочастотного периодического напряжения, под воздействием которого периодически изменяется частота (период) закона модуляции частоты генератора 4 СВЧ; процесс поиска происходит до тех пор пока не возникнет сигнал на выходе приемника 6. С этого момента обнаружитель 12 размыкает ключ 13, низкочастотные автоколебания на выходе усторойства 9 поиска-слежения прекращаются и прекращается изменение частоты (периода) модуляции генератора 4 СВЧ, что означает начало режима слежения;
- режим слежения характерен тем, что частота (период) модуляции сигнала зависят от выходного напряжения устройства 9 поиска-слежения, которое, в свою очередь, зависит от выходного напряжения частотного дискриминатора 8, переходная частота fд0 которого постоянна и стабильна (см. формулу 1). В режиме слежения период закона модуляции, преобразуемый в любую удобную форму информации, является линейной функцией высоты (см формулу 1), так как под воздействием выходного сигнала дискриминатора 8 устройство 9 поиска-слежения изменяет модуляции так, чтобы частота преобразованного сигнала была близкой к переходной частоте дискриминатора 8; при исчезновении сигнала с выхода приемника 6, обнаружитель 12 вновь замкнет ключ 13 и снова начнется режим поиска, который прекратится при обнаружении сигнала приемником 6.
При измерении очень малой высоты (Нмин от 0,3 до 6 м) и когда необходимо выполнить требование по исполнению РВ в виде моноблока, включающего передающую и приемную антенны, (внутренняя электрическая длина антенно-фидерного тракта при этом чрезвычайно мала) работа известного РВ затруднительна, так как ширина огибающей спектра преобразованного сигнала на входе частотного дискриминатора становится соизмеримой с шириной характеристики частотного дискриминатора, что приводит к снижению эквивалентной крутизны дискриминатора.
Преобразовав формулу (1) к виду

где:

и, учитывая, что выбор Пограничен нормативно-технической документацией величиной не более (150-170) МГц (разрешенный частотный диапазон для РВ от 4200 до 4400 МГц), получим при несимметричном законе модуляции коэффициент m=(1-1,1). По формуле (2) следует, что число периодов N преобразованного сигнала за период Тм модуляции численно равно, примерно, измеряемой высоте

При малом значении N ширина огибающей спектра преобразованного сигнала оказывается соизмеримой с шириной характеристики частотного дискриминатора, что приводит к снижению эквивалентной крутизны дискриминационной характеристики и уменьшению управляющего воздействия на интегратор 10 устройства 9 поиска-слежения и следящая система РВ переходит в поиск, несмотря на наличие сигнала на выходе приемника 6.
Это иллюстрируется фиг.урами 3а, 3б и 3в, на которых показано, что за период Тм модуляции (фиг. 3а) имеется всего два периода tд0 преобразованного сигнала (фиг. 3б). На фиг. 3в для этого случая показано взаимное расположение огибающей амплитудного спектра преобразованного сигнала (сплошная кривая) и дискриминационная характеристика дискриминатора 8 с переходной частотой fд0. На этой же фиг. 3в показана огибающая спектра сигнала для случая N-1 (пунктирная кривая); на фиг. 3г, 3д представлен случай, когда за тот же период Тм модуляции имеется большее число N периодов tд преобразованного сигнала; из этого следует, что для обеспечения эффективной работы дискриминатора 8 частоты необходимо иметь N≥(6 8).
В представляемой полезной модели для улучшения работы следящей системы радиовысотомера при измерении малой высоты, предлагается увеличить число N периодов преобразованного сигнала за период модуляции, не увеличивая электрическую длину антенно-фидерного тракта и не увеличивая полосу частотной модуляции ΔF.
С этой целью в известный РВ вводятся последовательно соединенные умножитель 15 частоты в n раз и второй частотный (периодный) дискриминатор 16, при этом вход умножителя 15 частоты соединен с выходом усилителя-ограничителя 7, выход первого дискриминатора 8 соединен с первым входом вновь введенного переключателя, выход второго, вновь вводимого, дискриминатора 16 частоты соединен со вторым входом вновь вводимого переключателя 17, выход переключателя 17 соединен со входом интегратора 10 устройства 9 поиска-слежения, а вход управления переключателя 17 соединен с выходом вновь введенной схемы сравнения 18, один из входов которой соединен с выходом устройства 9 поиска-слежения, а второй выход является опорным для задания порога срабатывания схемы сравнения.
Работа предлагаемой полезной модели РВ аналогична работе прототипа и имеет два режима работы - режим поиска и режим слежения; процесс перехода от одного режима к другому и обратно происходит аналогично прототипу.
Отличие состоит в том, что в предлагаемой полезной модели управление устройством 9 поиска-слежения производится от одного из дискриминаторов:
- на малой высоте - только от дискриминатора 16, имеющего переходную частоту nfд0,
- на большой высоте - только от дискриминатора 8, имеющего переходную частоту fд0.
Переключение выходов дискриминаторов 8, 16 производится, выходным сигналом устройства 9 поиска-слежения.
Отключение дискриминатора 16 на большой высоте необходимо для сохранения запаса устойчивости следящей системы РВ, так как коэффициент умножения n увеличивает усиление (добротность) следящей системы в n раз.
Предлагаемая полезная модель РВ обеспечивает измерение высоты при стоянке объекта и при полете на сверхмалой высоте радиовысотомером (моноблок, включающий, в том числе, антенны), имеющим короткий антенно-фидерный тракт.
Преимущество предлагаемой полезной модели перед известными РВ в том, что измерение сверхмалых высот обеспечивается без необходимости увеличивать длину антенно-фидерного тракта, что всегда приводит к увеличению массы и габаритов РВ.
В предлагаемой полезной модели задача решается введением сочетания простых и известных функциональных устройств, что не приводит к увеличению массы и габаритов РВ.
Вновь вводимые функциональные устройства могут быть выполнены любым известным образом с использованием любой элементной базы.
При выполнении умножителя частоты следует учитывать, что кратность умножения частоты n потребуется не более 3-4, поэтому его выполнение не вызовет затруднений, особенно, если он будет выполнен как радиочастотный умножитель [2], обеспечивающий наилучшие характеристики.
Источники информации.
1. П.А. Бакулев, А.А. Сосновский. Радионавигационные системы. М., Издательство «Радиотехника», 2005 г, глава 9, стр. 180-190.
2. В.И. Григулевич, И.Я. Иммореев. Радиоимпульсное преобразование частоты. М., Издательство «Советское Радио»,1966 г., стр. 328.
Реферат
Полезная модель радиовысотомера малых высот с частотной модуляцией предназначена для обеспечения устойчивого измерения малых и сверхмалых высот.Цель достигается введением дополнительно последовательно включенных умножителя частоты преобразованного сигнала в n раз и второго частотного (периодного) дискриминатора с переходной частотой nfв n раз кратной переходной частоте fпервого частотного (периодного) дискриминатора. 3 фиг.

Комментарии