Устройство для роботизированной хирургии - RU2635321C2
Код документа: RU2635321C2
Чертежи









Описание
Изобретение касается устройства для роботизированной хирургии с расположенной по меньшей мере в одной нестерильной области манипулирующей рукой с блоком сопряжения, который имеет по меньшей мере одно первое передаточное средство. Устройство имеет по меньшей мере один расположенный в стерильной области стерильный блок, который имеет по меньшей мере одно второе передаточное средство и стерильное перекрытие для экранирования манипулирующей руки от стерильной области.
В минимально инвазивной хирургии применяются так называемые телеманипуляторные системы, которые также называются роботоассистирующими системами. Стерильное операционное поле защищается от нестерильных элементов телеманипуляторной системы с помощью стерильного перекрытия. Посредством стерильного перекрытия предотвращается как загрязнение стерильного операционного поля, так и засорение телеманипуляторной системы биологическими жидкостями и/или тканью оперированного пациента или операционного персонала. Вследствие этого уменьшается риск перекрестных контаминаций (загрязнений/заражений).
С помощью телеманипуляторной системы хирургические инструменты и/или эндоскопы на основании ввода данных управления управляются в отношении своих положений и ориентаций и при этом неизбежно вступают в физический контакт с оперируемым пациентом, так что хирургические инструменты и/или эндоскопы загрязняются биологическими жидкостями и/или тканью прооперированного пациента. Одновременно хирургические инструменты должны сопрягаться механически, электрически и/или оптически с телеманипуляторной системой, чтобы обеспечить возможность реализации активного позиционирования и ориентирования хирургического инструмента, а также желаемое приведение в действие хирургического инструмента. Для этого хирургические инструменты, эндоскопы или обслуживаемые медицинские приборы имеют место сопряжения, которое может быть выполнено в виде блока сопряжения, а также называться как стерильный блок.
Использованный во время хирургического вмешательства материал, включая использованные хирургические приборы и инструменты и другие компоненты телеманипуляторной системы, может подразделяться на три категории.
Категория 1: Материал является стерильным и во время хирургического вмешательства загрязняется. Материал после операции утилизируется. Таким образом осуществляется одноразовое использование материала.
Категория 2: Материал является стерильным, во время хирургического вмешательства загрязняется и после операции очищается и стерилизуется. Таким образом осуществляется многоразовое использование материала. Такие многоразово используемые материалы должны быть сконструированы и произведены соответственно требованиям к соответствующему процессу стерилизации.
Категория 3: Материал не является стерильным. Во время хирургического вмешательства посредством стерильного перекрытия и внешней упаковки предотвращается загрязнение стерильного операционного поля. Одновременно нестерильный материал защищается от контакта с биологическими жидкостями и/или тканью.
Если необходимо приборы категории 1 или категории 2 сопрягать с приборами категории 3, то необходимо стерильное место сопряжения, которое предотвратит загрязнение приборов категории 1, соответственно категории 2 нестерильными приборами категории 3 и, наоборот, предотвратит загрязнение приборов категории 3, так как они в общем технически выполнены как не стерилизуемые, автоклавируемые компоненты. Выполнение приборов как стерилизуемых или автоклавируемых компонентов требует особенного технического расчета приборов для стерилизационного процесса, так что для этого необходимы более высокие затраты на разработку, а также значительные затраты на квалификационные испытания для подтверждения действенности стерилизационного процесса. Для одного из таких подтверждений, в частности, требуются приборы многократно последовательно загрязнять, стерилизовать, проводить проверку действенности стерилизации, а также проводить эксплуатационную проверку после проведенной стерилизации. При этом нужно представлять подтверждение, что приборы после каждой стерилизации надежно простерилизованы и таким образом могут снова использоваться.
Из документа US 7,666,191 B1 известна телеманипуляторная система, в которой нестерильная манипулирующая рука перекрыта посредством стерильной пленки. Блок сопряжения манипулирующей руки включает в себя четыре вращательных исполнительных элемента, которые сопрягаются с первой стороной интегрированного в стерильную пленку стерильного адаптера. С помощью стерильного адаптера вращательные движения четырех вращательных исполнительных элементов блока сопряжения манипулирующей руки входят в зацепление с четырьмя интегрированными в стерильный адаптер и установленными с возможностью вращения передаточными средствами. На стерильной наружной стороне стерильного адаптера эти стерильные на наружной стороне стерильного адаптера передаточные средства могут входить в зацепление с приведенными в действие элементами стерильного хирургического инструмента. Кроме того, посредством этого стерильного адаптера могут передаваться электрические сигналы между внутренней стороной и наружной стороной стерильного адаптера.
Таким образом, с помощью стерильного адаптера предотвращается то, что вращательные исполнительные элементы и электрические подключения стерильного хирургического инструмента непосредственно входят в контакт с вращательными исполнительными элементами и электрическими подключениями блока сопряжения нестерильной манипулирующей руки. Загрязнение хирургического инструмента в результате контакта с нестерильными частями манипулирующей руки предотвращается посредством стерильного адаптера. Однако в случае этого решения необходимо, чтобы стерильный адаптер имел установленные с возможностью вращения передаточные средства, а также передаточные средства для передачи электрических сигналов, вследствие чего адаптер должен трудоемко изготавливаться и является чувствительным к помехам. В частности, является затратным обеспечение возможности вращения передаточных средств, если передаточные средства входят в контакт с биологической жидкостью.
Принципиально каждый элемент в функциональной цепи для сопряжения манипулирующей руки и инструмента является возможным источником ошибок и связан с дополнительными затратами. Сам стерильный адаптер предусмотрен в качестве части стерильной пленки для одноразового использования.
Из документа US 8,074,657 В2 известен другой стерильный адаптер, который позволяет исполнительный блок для передачи механической энергии на сопряженный со стерильным адаптером хирургический инструмент.
Задачей настоящего изобретения является предложение устройства и системы для роботизированной хирургии, в которых стерильное сопряжение расположенной в нестерильной области манипулирующей руки с расположенным в стерильной области стерильным блоком является легко возможным, причем посредством сопряжения обеспечивается возможность надежной механической передачи усилия и момента и/или оптической передачи и/или электрического сигнала и/или передачи энергии между манипулирующей рукой и инструментальным блоком, который включает в себя, в частности, стерильный блок и соединенный с ним хирургический инструмент.
Эта задача решается посредством устройства для роботизированной хирургии с признаками пункта 1 формулы изобретения и посредством системы с признаками пункта 15 формулы изобретения. Предпочтительные усовершенствованные варианты изобретения указаны в зависимых пунктах формулы изобретения.
За счет наличия поступательного приводного элемента для создания поступательного приводного движения и вращательного приводного элемента для создания вращательного приводного движения в блоке сопряжения и за счет наличия сопрягающегося с поступательным приводным элементом поступательного ведомого элемента и сопрягающегося с вращательным приводным элементом вращательного ведомого элемента является возможным простой привод инструментального блока, который, в частности, включает в себя стерильный блок и соединенный с ним хирургический инструмент. За счет имеющегося в стерильном перекрытии стерильного шлюза, в свою очередь, является предпочтительно возможным надежное, независимое от блока сопряжения стерильное экранирование приводных элементов, когда стерильный блок не соединен со стерильным шлюзом. Стерильный шлюз экранирует приводные элементы даже после того, как стерильный блок был отсоединен от стерильного шлюза. Вследствие этого является легко возможной надежное стерильное перекрытие нестерильных элементов манипулирующей руки от стерильной области.
С помощью вращательного приводного устройства и поступательного приводного устройства может просто выполняться, например, вращение инструмента и отклонение (сгибание) конца инструмента или вращение инструмента и захватывающее движение. Альтернативно, инструментальный хвостовик может вращаться и может выполняться захватывающее движение инструмента.
Особенно предпочтительно, если с помощью сопряженного с поступательным ведомым элементом поступательного приводного элемента возможна передача поступательного приводного движения на поступательный ведомый элемент. С помощью сопряженного с вращательным ведомым элементом вращательного приводного элемента возможна передача вращательного приводного движения на вращательный ведомый элемент.
Вращательный приводной элемент в общем является приводным элементом, который может совершать вращательное приводное движение, соответственно поворотное движение и для этого непосредственно или опосредованно приводиться в действие, в частности, приводным мотором.
Вращательный ведомый элемент в общем является сопрягающимся с вращательным приводным элементом ведомым элементом, который совершает вращательное движение, соответственно поворотное движение, когда сопряженный с ведомым вращательным элементом вращательный приводной элемент совершает вращательное приводное движение, соответственно поворотное движение.
Поступательный приводной элемент в общем является приводным элементом, который может совершать поступательное приводное движение, соответственно поступательное движение и для этого приводиться в действие приводным мотором непосредственно или опосредованно.
Поступательный ведомый элемент в общем является сопрягающимся с поступательным приводным элементом ведомым элементом, который совершает поступательное движение, соответственно поступательное движение, когда сопряженный с ведомым поступательным элементом поступательный приводной элемент совершает поступательное приводное движение, соответственно поступательное движение. При сопряжении приводного элемента с ведомым элементом происходит предпочтительно непосредственный контакт соответствующего приводного элемента с ответным ведомым элементом для передачи приводного движения. Это может происходить, в частности, посредством соединения с геометрическим и/или силовым замыканием и/или магнитного сцепления между соответствующим ведомым элементом и приводным элементом.
Предпочтительно, если соединенный с блоком сопряжения и со стерильным блоком стерильный шлюз освобождает доступ к приводным элементам таким образом, что поступательный приводной элемент выполнен с возможностью сопряжения с поступательным ведомым элементом, а вращательный приводной элемент - с вращательным ведомым элементом. Сцепление/сопряжение между приводным элементом и ведомым элементом происходит, в частности, посредством непосредственного зацепления, как, например, соединение с геометрическим замыканием, или посредством соединения с силовым замыканием.
Далее предпочтительно, если стерильный блок включает в себя стерильное перекрытие, которое стерильно экранирует ведомые элементы, пока стерильный блок не будет соединен со стерильным шлюзом, и предпочтительно после того, как стерильный блок будет отсоединен от стерильного шлюза. Стерильный шлюз освобождает доступ к ведомым элементам, если стерильный шлюз соединен с блоком сопряжения и со стерильным блоком. Вследствие этого возможно простое манипулирование хирургическим элементом и манипулирующей рукой, так как стерильный блок выполнен с возможностью соединения с хирургическим инструментом и повторного отсоединения просто посредством блока сопряжения манипулирующей руки, причем гарантированно, что ведомые элементы стерильно экранированы, когда стерильный блок не соединен со стерильным шлюзом, соответственно не сопряжен с блоком сопряжения. Вследствие этого возможно надежное манипулирование инструментальным блоком в стерильной области, так что инструментальный блок также может сниматься после контакта ведомых элементов с нестерильными приводными элементами в стерильной области без того, чтобы из-за этого загрязнялась стерильная область.
Далее предпочтительно, если стерильный шлюз включает в себя стерильное перекрытие, которое стерильно экранирует приводные элементы до тех пор, пока стерильный блок не будет соединен со стерильным шлюзом, и предпочтительно после того, как стерильный блок будет отсоединен от стерильного шлюза. Стерильный шлюз освобождает доступ к приводным элементам, если стерильный шлюз соединен с блоком сопряжения и со стерильным блоком. Вследствие этого гарантируется, что обычно нестерильные приводные элементы блока сопряжения с помощью стерильного шлюза всегда надежно экранированы от стерильной области тогда, когда стерильный блок инструментального блока не соединен со стерильным шлюзом, в частности после того, как стерильный шлюз инструментального блока повторно был отсоединен от шлюза инструментального блока. Стерильный шлюз открывает доступ к приводным элементам, если стерильный шлюз соединен с блоком сопряжения и со стерильным блоком. Вследствие этого достигается надежное стерильное экранирование нестерильного блока сопряжения, в частности нестерильных приводных элементов от стерильной области. При сопряжении стерильного блока со стерильным шлюзом освобождается предпочтительно стерильно перекрытое отверстие доступа стерильного шлюза с тем, чтобы приводные элементы с ведомыми элементами могли входить в непосредственный контакт друг с другом, в частности могли друг с другом входить в непосредственное зацепление.
Стерильное перекрытие стерильного шлюза для стерильного перекрытия приводных элементов и/или стерильное перекрытие стерильного блока для стерильного экранирования ведомых элементов может включать в себя жалюзи, рулонные жалюзи, снабженный отверстием вращающийся диск и/или заслонку. Вследствие этого является легко возможным простое надежное закрытие и открытие по меньшей мере одного отверстия доступа к приводным элементам, соответственно ведомым элементам.
Особенно предпочтительно, если поступательный приводной элемент является первым поступательным приводным элементом, а вращательный приводной элемент является первым вращательным приводным элементом, и если поступательный ведомый элемент является первый поступательным ведомым элементом и если вращательный ведомый элемент является первым вращательным ведомым элементом. Блок сопряжения включает в себя второй поступательный приводной элемент для создания поступательного приводного движения и второй вращательный приводной элемент для создания вращательного приводного движения. Стерильный блок имеет сопрягаемый со вторым поступательным приводным элементом второй поступательный ведомый элемент и сопрягаемый со вторым вращательным приводным элементом второй вращательный ведомый элемент. Соединенный с блоком сопряжения стерильный шлюз стерильно экранирует первый и второй поступательный приводной элемент и первый и второй вращательный приводной элемент до тех пор, пока стерильный блок не будет соединен со стерильным шлюзом, и предпочтительно после того, как стерильный блок будет отсоединен от стерильного шлюза.
В общем, приводные движения всех приводных элементов являются независимыми друг от друга, в частности не являются механически сцепленными/сопряженными. Все приводные движения приводных элементов управляются с помощью блока управления и предпочтительно контролируются электронным образом.
Кроме того, предпочтительно, если первый и/или второй поступательный ведомый элемент с помощью возвращающей силы упругодеформируемого элемента имеет возможность перемещения в исходное положение и если эта возвращающая сила перемещает соответствующий поступательный ведомый элемент после отсоединения стерильного блока от стерильного шлюза в его исходное положение. Вследствие этого является просто возможным заданное положение поступательного ведомого элемента при соединении, соответственно повторном соединении стерильного блока со стерильным шлюзом и при происходящем вследствие этого сцеплении приводного элемента с ведомым элементом. При этом возвращающая сила имеет по меньшей мере такую величину, что она возвращает обратно вызванное поступательным приводным элементом перемещение/перестановку хирургического инструмента в исходное положение, если никакие дальнейшие силовые воздействия на инструмент не препятствуют возвращению в исходное состояние или предотвращают его.
Далее, предпочтительно, если блок сопряжения имеет по меньшей мере один датчик положения для определения по меньшей мере одного поворотного углового положения первого и/или второго вращательно ведомого элемента. Предпочтительно устройство включает в себя первый датчик положения для определения по меньшей мере одного поворотного углового положения первого вращательно ведомого элемента и второй датчик положения для определения по меньшей мере одного поворотного углового положения второго вращательно ведомого элемента. В таком случае, при инициализации первый вращательно ведомый элемент с помощью первого вращательного приводного элемента поворачивается до тех пор, пока первый датчик положения не определит заданное угловое положение ведомого вращательного элемента. В частности, ведомый вращательный элемент в угловом положении включает в себя определяемый с помощью первого датчика положения выступ или углубление, который соответственно, которое могут определяться с помощью датчика положения, когда выступ, соответственно углубление расположены напротив датчика положения. Тем самым может определяться угловое положение вращательно ведомого элемента и исходя из этого дальнейший привод ведомого вращательного элемента может контролироваться с помощью блока управления таким образом, что известно угловое положение ведомого вращательного элемента в каждый момент времени и учитывается при дальнейшей настройке.
Таким же образом может определяться заданное поворотное угловое положение второго вращательного ведомого элемента с помощью второго датчика положения, так что с помощью блока управления привод второго вращательного ведомого элемента контролируется таким образом, что его поворотное угловое положение в каждый момент времени известно и может учитываться при дальнейшей настройке.
Далее, предпочтительно, если блок сопряжения перемещает поступательный приводной элемент в исходном положении после того, как стерильный блок был отсоединен от стерильного шлюза. Вследствие этого расположенный в своем исходном положении поступательный приводной элемент может автоматически входить в непосредственное зацепление с расположенным в своем исходном положении поступательным ведомым элементом при соединении стерильного блока с соединенным с блоком сопряжения стерильным шлюзом.
Поступательный приводной элемент может быть образован, например, вилкой, зубцы которой входят в окружную канавку поступательного ведомого элемента. Эта канавка является предпочтительно окружной канавкой, так что поступательный ведомый элемент вместе с элементами инструментального блока могут поворачиваться в вилке для вращательной силовой передачи, например, для инструментального хвостовика.
Особенно предпочтительно, если блок сопряжения перемещает первый поступательный приводной элемент в его исходное положение после того, как стерильный блок был отсоединен от стерильного шлюза. Расположенный в своем исходном положении первый поступательный приводной элемент выполнен с возможностью автоматического приведения в непосредственное зацепление с расположенным в своем исходном положении первым поступательным ведомым элементом при соединении стерильного блока с соединенным с блоком сопряжения стерильным шлюзом.
Далее предпочтительно, если блок сопряжения перемещает второй поступательный приводной элемент в его исходное положение после того, как стерильный блок был отсоединен от стерильного шлюза. Расположенный в своем исходном положении второй поступательный приводной элемент выполнен с возможностью автоматического приведения в непосредственное зацепление с расположенным в своем исходном положении вторым поступательным ведомым элементом при соединении стерильного блока с соединенным с блоком сопряжения стерильным шлюзом.
Таким образом, особенно предпочтительно, если первый и/или второй поступательно ведомый элемент с помощью упругодеформируемого элемента после отсоединения стерильного блока от стерильного шлюза перемещается в свое исходное положение и если первый и/или второй поступательный приводной элемент после отсоединения стерильного блока от стерильного шлюза с помощью приводного элемента перемещается в свое исходное положение. Этим гарантируется, что повторное соединение стерильного блока со стерильным шлюзом и вызванное этим сцепление/сопряжение приводных элементов с ведомыми элементами является беспроблемно возможным.
Далее, предпочтительно, если ведомые элементы расположены друг за другом вдоль продольной оси хирургического инструмента и если ведомые элементы от проксимального конца хирургического инструмента расположены предпочтительно в последовательности первый вращательный ведомый элемент, первый поступательный ведомый элемент, второй вращательный ведомый элемент, второй поступательный ведомый элемент. Опционно, вдоль продольной оси могут быть расположены в последовательности друг за другом электрические контакты и/или оптические интерфейсы. В соединенном состоянии стерильного блока со стерильным шлюзом и стерильного шлюза с блоком сопряжения ответные ведомым элементам приводные элементы, ответные электрическим контактам электрические контакты и ответные оптическим интерфейсам оптические интерфейсы расположены напротив. Вследствие этого возможна компактная и экономичная конструкция как стерильного блока, так и блока сопряжения.
Далее предпочтительно, если первый вращательный ведомый элемент без возможности проворота соединен с наружным инструментальным хвостовиком для его вращения. Вследствие этого вращение наружного инструментального хвостовика вокруг его продольной оси является просто возможным посредством первого вращательного приводного элемента через первый вращательный ведомый элемент.
Далее, первый поступательный ведомый элемент может быть соединен с расположенным в наружном инструментальном хвостовике с возможностью смещения вдоль в направлении продольной оси наружного инструментального хвостовика первым внутренним инструментальным хвостовиком, причем при движении первого внутреннего инструментального хвостовика вершина инструмента может поворачиваться вокруг оси вращения, которая проходит предпочтительно перпендикулярно продольной оси хирургического инструмента. Вследствие этого, в частности, расположенная на проксимальном конце хирургического инструмента вершина инструмента может сгибаться при приводе поступательного ведомого элемента с помощью первого поступательного приводного элемента.
Далее, второй вращательный ведомый элемент без возможности проворота может быть соединен с расположенным в первом внутреннем инструментальном хвостовике вторым внутренним инструментальным хвостовиком, причем вращение второго внутреннего инструментального хвостовика осуществляет вращение исполнительного органа (конечный эффектор) независимо от наружного инструментального хвостовика. Вместо второго внутреннего инструментального хвостовика или во втором внутреннем инструментальном хвостовике может быть предусмотрена вращающая или толкающая штанга, которая может быть выполнена, в частности, упругодеформируемой или, например, в виде проволочного троса.
Второй поступательный ведомый элемент может быть соединен с расположенным с возможностью смещения вдоль относительно первого внутреннего инструментального хвостовика вторым внутренним инструментальным хвостовиком для приведения в движение исполнительного органа (конечный эффектор). Вследствие этого, в частности, может просто осуществляться приведение в движение исполнительного органа вершины инструмента.
Ось вращения, вокруг которой может поворачиваться исполнительный орган (концевой эффектор), предпочтительно перпендикулярна продольной оси внутренних и наружного инструментальных хвостовиков. Предпочтительно внутренние и наружный инструментальные хвостовики выполнены без возможности проворота друг относительно друга. Далее, наружный инструментальный хвостовик и внутренние инструментальные хвостовики имеют одну и ту же продольную ось, т.е. они являются коаксиальными.
Далее предпочтительно, если стерильный блок имеет по меньшей мере одно первое коаксиально второму внутреннему инструментальному хвостовику электропроводно соединенное с ним контактное (токосъемное) кольцо. Таким образом, электрическая энергия может направляться от блока сопряжения через контактное кольцо на исполнительный орган, чтобы, например, обеспечить электрической энергией монополярный хирургический инструмент для высокочастотной хирургии.
Особенно предпочтительно, если стерильный блок имеет второе коаксиально первому внутреннему инструментальному хвостовику электрически соединенное с ним контактное кольцо, причем второй внутренний инструментальный хвостовик и первый внутренний инструментальный хвостовик расположены электрически изолированно друг от друга. Предпочтительно первый внутренний инструментальный хвостовик и наружный инструментальный хвостовик также расположены электрически изолированно друг от друга. Вследствие этого передача электрической энергии для биполярного хирургического инструмента может надежно обеспечиваться электрической энергией.
Особенно предпочтительно, если хирургический инструмент имеет исполнительный орган с двумя подвижными относительно друг друга с помощью второго внутреннего хвостовика руками и если руки расположены электрически изолированно друг от друга. Руки электропроводно соединены с электрическим кабелем, которые направлены во втором внутреннем инструментальном хвостовике или в третьем расположенном во втором внутреннем инструментальном хвостовике инструментальном хвостовике. Кабель является предпочтительно изолированным проводом для передачи электрической энергии между стерильным блоком и исполнительным органом. Вследствие этого является просто возможной простая и надежная передача высокочастотной электрической энергии от стерильного блока к вершине инструмента, соответственно к исполнительному органу. Далее, первая рука исполнительного органа для образования создания движения рук друг относительно друга может активно двигаться, а вторая рука исполнительного органа может быть установлена стационарно. Руки являются предпочтительно захватывающими руками, зажимными руками и могут соответственно включать в себя нож и/или зажимную зону.
Далее предпочтительно, если стерильный блок имеет первую опору для вращающегося опирания наружного инструментального хвостовика относительно сопрягаемого со стерильным шлюзом корпуса стерильного блока и если стерильный блок имеет по меньшей мере одну вторую опору для вращающегося опирания вращающей и толкающей штанги относительно корпуса стерильного блока. Вследствие этого является возможным простое и надежное опирание элементов инструментального хвостовика и ведомых элементов.
Далее предпочтительно, если блок сопряжения посредством линий электроснабжения соединен со схемой управления блока управления и/или блоком электроснабжения, предпочтительно посредством по меньшей мере одного штекерного соединителя, для обеспечения по меньшей мере одного расположенного в блоке сопряжения электрического приводного устройства. Предпочтительно в блоке сопряжения расположены четыре электрических приводных устройства, которые соответственно приводят в движение приводной элемент, такой как первый вращательный приводной элемент, второй вращательный приводной элемент, первый поступательный приводной элемент и/или второй поступательный приводной элемент.
Далее, блок управления может быть соединен с блоком сопряжения посредством по меньшей мере одного блока управления и/или сигнализации, предпочтительно посредством штекерных соединителей, для сопряжения блока управления. Также блок сопряжения может быть соединен с по меньшей мере одной линией электроснабжения для подачи высокочастотной электрической энергии для высокочастотной хирургии. Высокочастотная электрическая энергия предпочтительно посредством контактов контактного кольца блока сопряжения передается на контактные кольца стерильного блока. Вследствие этого является возможным простое использование хирургических инструментов для высокочастотной хирургии, причем электроснабжение хирургических инструментов для высокочастотной хирургии без отдельных соединений осуществляется просто через сопряжение стерильного блока с блоком сопряжения.
Кроме того, стерильный блок и блок сопряжения могут иметь передаточные средства для оптической и/или электрической передачи измеряемого и/или управляющего сигналов и/или визуальной информации, для предоставления оптического канала для освещения и/или для передачи изображения между стерильным блоком и блоком сопряжения.
У изобретения, в частности, при соединении стерильного блока со стерильным шлюзом освобождается до сих пор стерильно перекрытые приводные элементы для сопряжения с ведомыми элементами. При отсоединении стерильного блока от стерильного шлюза по меньшей мере упомянутое первое передаточное средство вновь стерильно экранируется. Предпочтительно стерильный шлюз уже соединен с блоком сопряжения при соединении и отсоединении стерильного блока соответственно от стерильного шлюза. Предпочтительно стерильный шлюз в течение всего промежутка времени хирургического вмешательства остается соединенным с блоком сопряжения, причем инструментальный блок со стерильным блоком может многократно отсоединяться от блока сопряжения манипулирующей руки и затем вновь соединяться с ней, соответственно может заменяться на другой инструментальный блок с другим стерильным блоком.
Посредством изобретения, в частности, возможно выполнить стерильный шлюз без механических и/или электрических передаточных средств, так что возможно как надежное стерильное экранирование нестерильной манипулирующей руки и нестерильного блока сопряжения, так и надежное соединение/сопряжение приводных устройств с ведомыми элементами без промежуточного включения других передаточных средств, в частности, без промежуточного включения других механических передаточных средств. Стерильное перекрытие включает в себя, в частности, стерильный гибкий материал, такой как стерильная пленка, и по меньшей мере один стерильный шлюз.
Предпочтительно, если стерильный блок имеет по меньшей мере одну стерильную заслонку, которая в закрытом состоянии стерильно экранирует второе передаточное средство. В таком случае, при соединении стерильного блока со стерильным шлюзом происходит соответственно перемещение шлюзовой заслонки и стерильной заслонки из закрытого состояния в открытое состояние, так что непосредственная передача между первым передаточным средством и вторым передаточным средством является возможной посредством освобожденного шлюзовой заслонкой и стерильной заслонкой в открытом состоянии отверстия. При отсоединении стерильного блока от стерильного шлюза происходит перемещение шлюзовой заслонки и стерильной заслонки соответственно из открытого состояния в закрытое состояние, так что шлюзовая заслонка после отсоединения экранирует первое передаточное средство, а стерильная заслонка после отсоединения экранирует второе передаточное средство от стерильной области.
Стерильный блок согласно определению вводной части описания является материалом категории 1 и 2 и таким образом является стерильным.
Далее предпочтительно, если блок сопряжения выполнен с возможностью соединения с первой соединительной областью стерильного шлюза и если стерильный блок соединен со второй соединительной областью стерильного шлюза. Первая соединительная область и вторая соединительная область предпочтительно расположены на обращенных друг от друга сторонах стерильного шлюза. Вследствие этого является возможным простое соединение и тем самым простое манипулирование как стерильного перекрытия, так и стерильного блока перед, во время и после хирургического вмешательства. Далее особенно предпочтительно, если вторая соединительная область выполнена как приемная область, в которой может по меньшей мере частично приниматься стерильный блок при соединении со второй соединительной областью. Вследствие этого может создаваться простое и надежное соединение между стерильным блоком и стерильным шлюзом. В частности, стерильный блок по меньшей мере частично может вдавливаться в приемную область и там блокироваться.
Далее предпочтительно, если стерильный шлюз имеет третью соединительную область, с которой соединено упругое перекрытие, причем эта третья соединительная область расположена предпочтительно проходящей вокруг стерильного шлюза, в частности проходящей по кругу на боковой поверхности, предпочтительно между первой и второй соединительными областями. Посредством стерильного шлюза осуществляется простое соединение стерильной области и нестерильной области для соединения блока сопряжения со стерильным блоком без того, чтобы стерильный блок загрязнялся таким образом, что после отсоединения от стерильного шлюза он больше не мог оставаться в стерильной области.
Предпочтительно блок сопряжения расположен на проксимальном конце манипулирующей руки.
Далее предпочтительно, если первая соединительная область стерильного шлюза посредством первого, выполненного с возможностью разъема, фиксирующего соединения может соединяться с блоком сопряжения, а вторая соединительная область стерильного шлюза посредством второго, выполненного с возможностью разъема, фиксирующего соединения может соединяться со стерильным блоком. Вследствие этого стерильный шлюз выполнен с возможностью надежного соединения как с блоком сопряжения, так и со стерильным блоком и с возможностью вновь просто отсоединяться от него, так что является возможным простое обращение как со стерильным перекрытием со стерильным шлюзом, так и со стерильным блоком, в частности, во время операции.
Особенно предпочтительно, если блок сопряжения включает в себя по меньшей мере один датчик сопряжения, который обнаруживает наличие правильно соединенного со стерильным шлюзом стерильного блока. Далее, устройство имеет блок управления, который разрешает передачу между первым передаточным средством и вторым передаточным средством только тогда, когда с помощью датчика сопряжения был обнаружен правильно соединенный со стерильным шлюзом стерильный блок. У одного другого предпочтительного варианта осуществления изобретения датчик сопряжения с помощью предусмотренного на стерильном блоке детекторного элемента, который при соединении со стерильным шлюзом выступает до первой соединительной области, с которой соединен блок сопряжения, обнаруживает, что соединены правильно как стерильный блок со второй соединительной областью, так и блок сопряжения с первой соединительной областью. Блок управления деблокирует, соответственно позволяет привод ведомых элементов посредством приводных элементов предпочтительно только тогда, когда датчик сопряжения обнаружил правильное соединение между стерильным блоком и второй соединительной областью и между блоком сопряжения и первой соединительной областью.
Дополнительно, с помощью датчика сопряжения может легко обнаруживаться, соединен ли правильно, по меньшей мере стерильный блок со стерильным шлюзом, так что затем из этого может получаться, что стерильный блок правильно соединен со стерильным шлюзом и через стерильный шлюз правильно соединен с блоком сопряжения манипулирующей руки. Вследствие этого является возможным безопасный привод ведомых элементов посредством приводных элементов.
Хирургический инструмент включает в себя предпочтительно по меньшей мере один выполненный с возможностью введения в отверстие в теле пациента исполнительный орган (концевой эффектор), как, например, зажим, ножницы, захват, иглодержатель, микродиссектор, скобочное устройство, устройство для сшивания, промывочное и/или отсасывающее устройство, лезвие, зонд для прижиганий, катетер и/или отсос. Вследствие этого хирургический инструмент может иметь на выбор различные исполнительные органы (концевые эффекторы), которые могут использоваться для общепринятых минимально инвазивных вмешательств, в частности, при лапароскопической хирургии. Однако дополнительно или альтернативно могут использоваться и другие хирургические инструменты. В частности, хирургический инструмент может быть также оптическим хирургическим инструментом, как, например, эндоскоп, который, кроме того, имеет оптическое или электрическое передаточное средство или места сопряжения (интерфейсы), как, например, электрические контакты для управления камерой или для передачи видеоданных оптических оптоволоконных соединений, в частности, для освещения.
Второй аспект касается системы для роботизированной хирургии, в частности, для телероботизированной процедуры внутри стерильного поля с помощью стерильного хирургического инструмента. Эта система включает в себя по меньшей мере одно устройство по пункту 1 формулы изобретения или по ранее указанному усовершенствованию, индикаторный блок, который по меньшей мере одно изображение операционной области, в которой может находиться исполнительный орган хирургического инструмента, выдает в реальном времени, предпочтительно в виде последовательности изображений, и по меньшей мере одно устройство для ввода по меньшей мере одной вводной команды. Далее, система имеет блок управления, который в зависимости от вводной команды с помощью по меньшей мере одного приводного устройства позиционирует манипулирующую руку и соединенный посредством стерильного шлюза с блоком сопряжения манипулирующей руки стерильный блок. Вследствие этого является просто возможным простое управление манипулирующей рукой для позиционирования стерильного блока и/или обслуживающее действие для приведения в действие стерильного блока. Предпочтительно устройство ввода имеет выполненный с возможностью приведения в действие обслуживающим персоналом, например хирургом, исполнительный элемент, причем устройство ввода регистрирует изменение пространственного положения исполнительного элемента и создает соответствующую зарегистрированному изменению пространственного положения вводную команду. Блок управления в зависимости от вводной команды создает по меньшей мере одну управляющую команду, которой вызывается то же или уменьшенное в масштабе изменение пространственного положения по меньшей мере одного конца стерильного блока и/или хирургического инструмента, на дистальном конце которого расположен стерильный блок, и/или которой вызывается приведение в действие или редуцированное приведение в действие хирургического инструмента, на дистальном конце которого расположен стерильный блок. Вследствие этого является просто возможным простое позиционирование и/или приведение в действие хирургического инструмента находящимся удаленно от пациента в операционном зале или снаружи операционного зала обслуживающим персоналом. В качестве выдачи изображения в реальном времени возникает непосредственная выдача зарегистрированного с помощью блока регистрации изображения предпочтительно в виде видеоряда без запаздываний, превышающих возникающие при обработке изображений запаздывания.
Далее предпочтительно, если система имеет несколько устройств для роботизированной хирургии по пункту 1 формулы изобретения или по указанному усовершенствованию. Устройство ввода имеет предпочтительно по меньшей мере два приводимых в действие обслуживающим персоналом исполнительных элемента, причем устройство ввода регистрирует изменение пространственного положения каждого исполнительного элемента и соответственно создает соответствующую зарегистрированному изменению пространственного положения вводную команду. Блок управления в зависимости от каждой вводной команды создает соответственно по меньшей мере одну управляющую команду, которой вызывается то же самое или измененное в масштабе изменение пространственного положения по меньшей мере одного конца хирургического инструмента, на дистальном конце которого расположен стерильный блок, согласованного с соответствующим исполнительным инструментом в момент приведения в действие устройства для роботизированной хирургии и/или которой вызывается приведение в действие или масштабированное приведение в действие этого хирургического инструмента. Вследствие этого операция может проводиться несколькими инструментами, которые одновременно находятся в операционном поле, соответственно которые при лапароскопическом вмешательстве одновременно находятся в брюшной полости пациента.
Стерильный шлюз может иметь две шлюзовые заслонки, а стерильный блок может иметь две стерильные заслонки.
Стерильный шлюз во всех описанных вариантах осуществления изобретения не является составной частью функциональной цепи для передачи электрической энергии, электрических или оптических сигналов и/или механической энергии между манипулирующей рукой и стерильным блоком. Наоборот, стерильный шлюз может включать в себя стационарную формованную часть и включающую в себя по меньшей мере одну шлюзовую заслонку, шлюзовую заслоночную систему, которая экранирует нестерильные приводные элементы блока сопряжения таким образом, что она и весь блок сопряжения после размещения стерильного перекрытия стерильно перекрыты стерильным шлюзом от стерильного окружения. При этом механизм открытия шлюзовой заслоночной системы предпочтительно конструктивно выполнен так, что он не может открываться наружу посредством ошибочного приведения в действие. Кроме того, посредством стерильного корпуса стерильного блока и, в частности, посредством упомянутой по меньшей мере одной стерильной заслонки стерильного блока также могут стерильно экранироваться ведомые элементы.
Приводные элементы и ведомые элементы предпочтительно выполнены таким образом, что лапароскопический хирургический инструмент может перемещаться в целом со всеми четырьмя степенями свободы, а именно:
1) вращение хвостовика инструмента,
2) вращение вершины инструмента независимо от хвостовика инструмента,
3) сгибание вершины инструмента относительно хвостовика инструмента,
4) приведение в действие хирургического инструмента, в частности, для создания относительного движения двух расположенных подвижно друг относительно друга элементов, например хватательное движение наконечника инструмента, или лезвий.
Стерильный корпус стерильного блока во время соединения со стерильным шлюзом предпочтительно вдавливается в приемную область второй соединительной области и посредством механического фиксатора (защелка) на стерильном шлюзе защищается от непреднамеренного отсоединения. Механический фиксатор формирует тем самым фиксирующее (защелкивающее) соединение между стерильным шлюзом и стерильным блоком. Для отделения стерильного блока от стерильного шлюза приводится в действие вручную деблокирующая кнопка, так что стерильный блок может отделяться от второй соединительной области, предпочтительно извлекаться из приемной области второй соединительной области.
В качестве «проксимального», в общем, рассматривается обращенный к пациенту конец любого элемента. В качестве «дистального», в общем, рассматривается обращенный от пациента конец элемента.
Другие признаки и преимущества следуют из описания, которое более подробно поясняет изобретение на основании примеров осуществления в связи с приложенными фигурами, которые показывают:
Фиг. 1 - схематичное изображение системы для роботизированной хирургии с манипулятором, который имеет четыре манипулирующие руки, с которыми соответственно может соединяться стерильный блок первого инструментального блока;
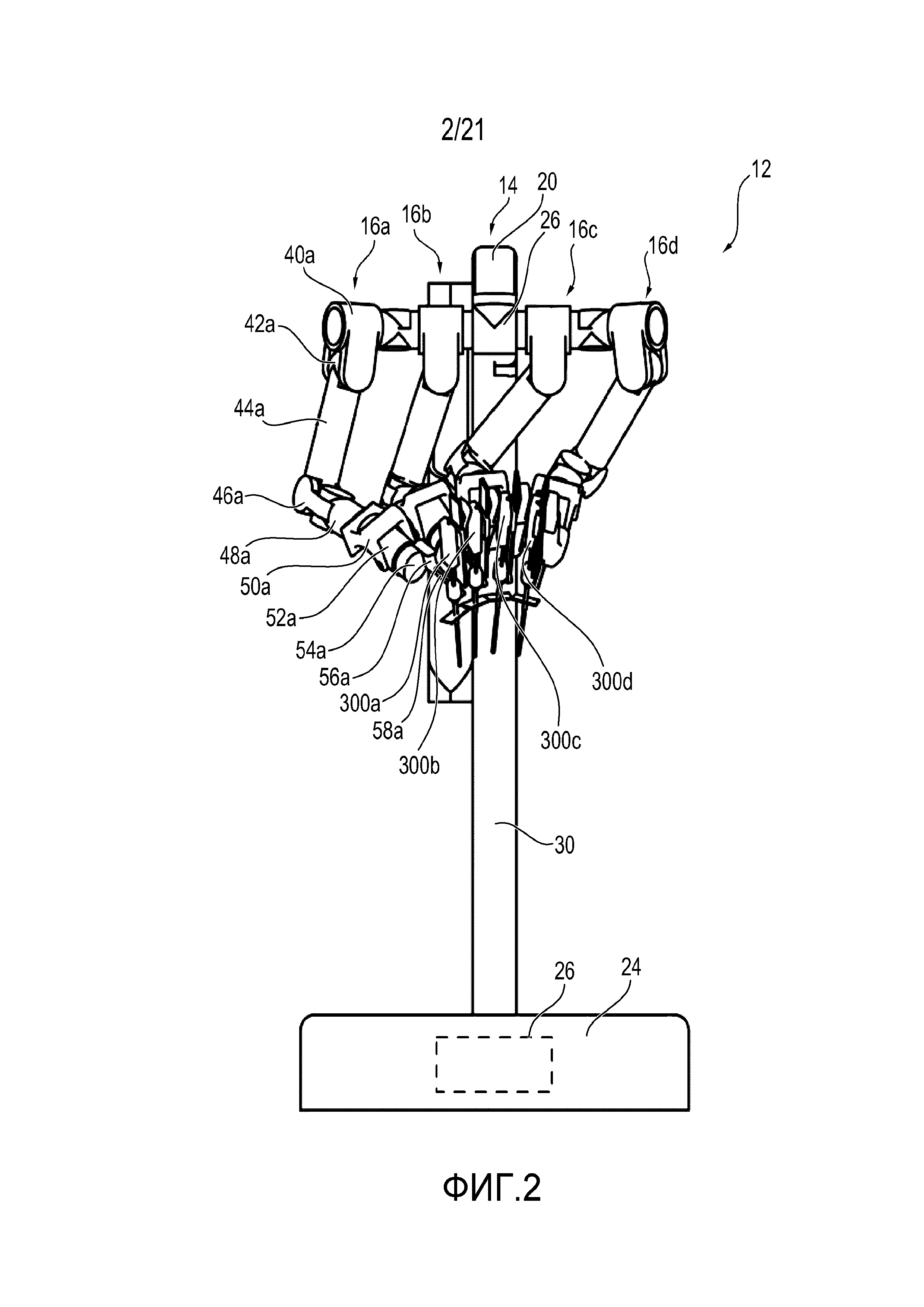
Фиг. 2 - вид спереди изображенного на фиг. 1 манипулятора;
Фиг. 3 - перспективное изображение фрагмента манипулирующей руки с блоком сопряжения для сопряжения манипулирующей руки с включающим в себя стерильный блок инструментальным блоком, с сопряженным с блоком сопряжения стерильным шлюзом и с сопряженным со стерильным шлюзом стерильным блоком инструментального блока;
Фиг. 4 - другое перспективное изображение системы по фиг. 3;
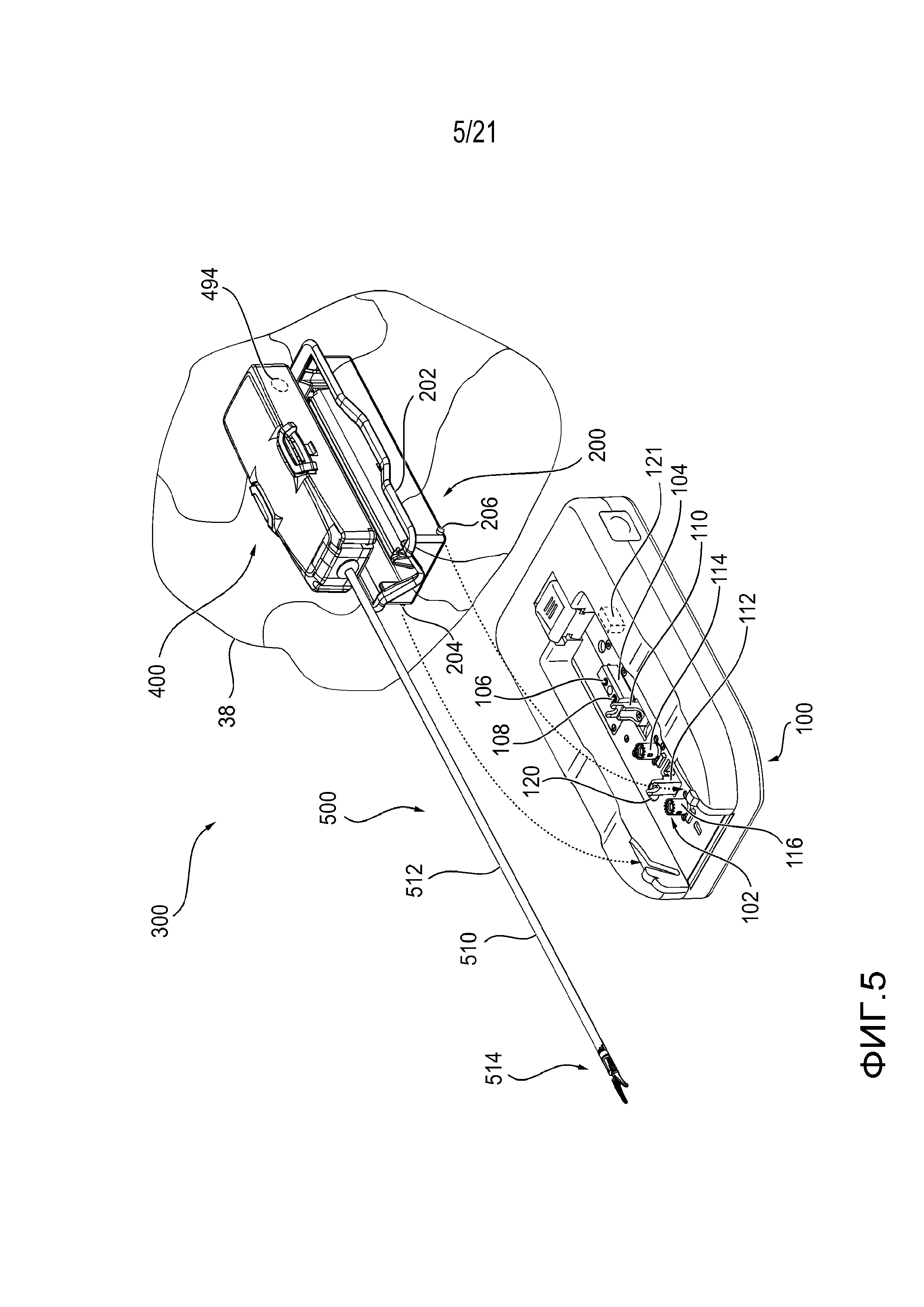
Фиг. 5 - система для соединения первого расположенного в стерильной области инструментального блока с нестерильным блоком сопряжения манипулирующей руки;
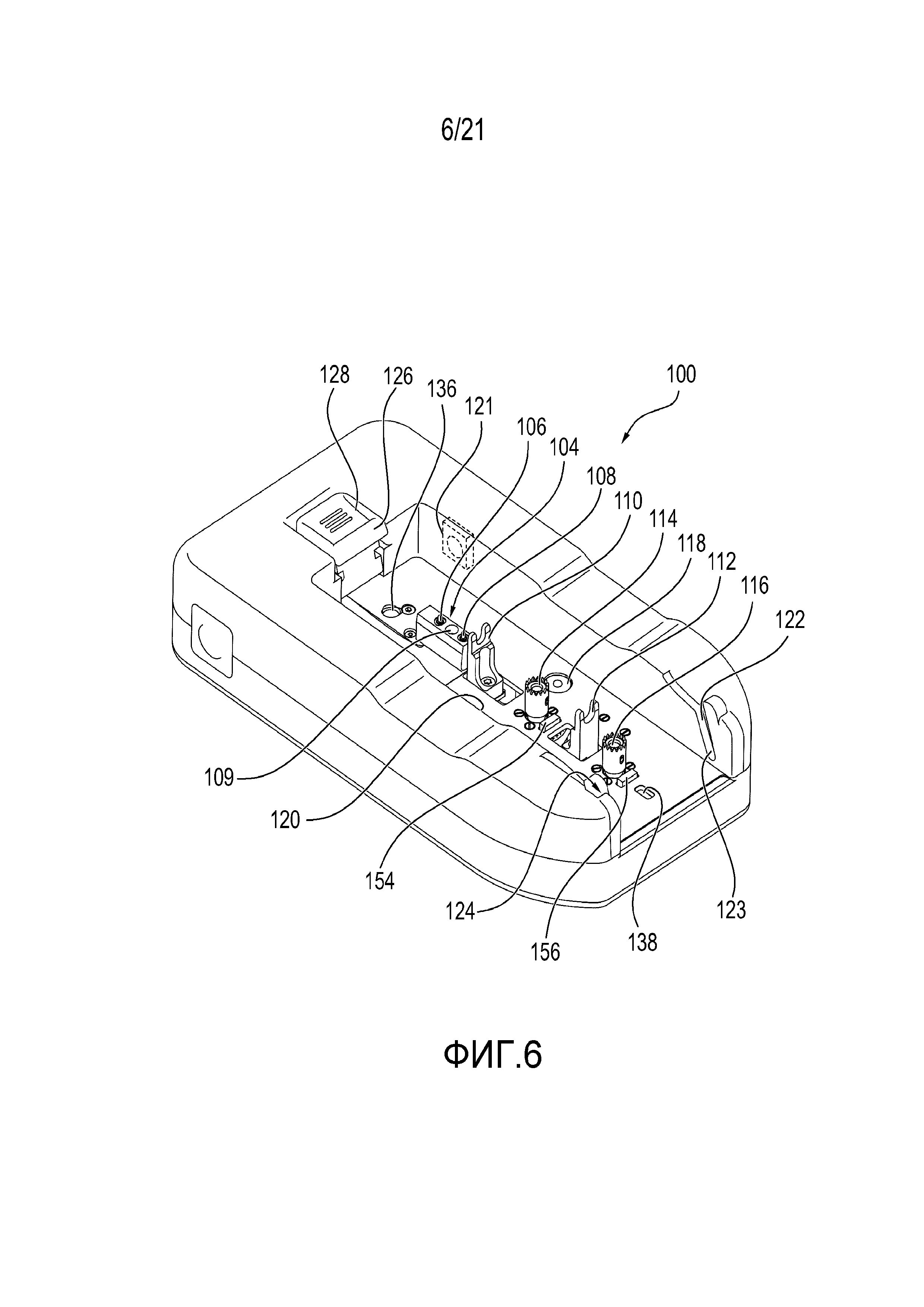
Фиг. 6 - схематичное изображение блока сопряжения манипулирующей руки;
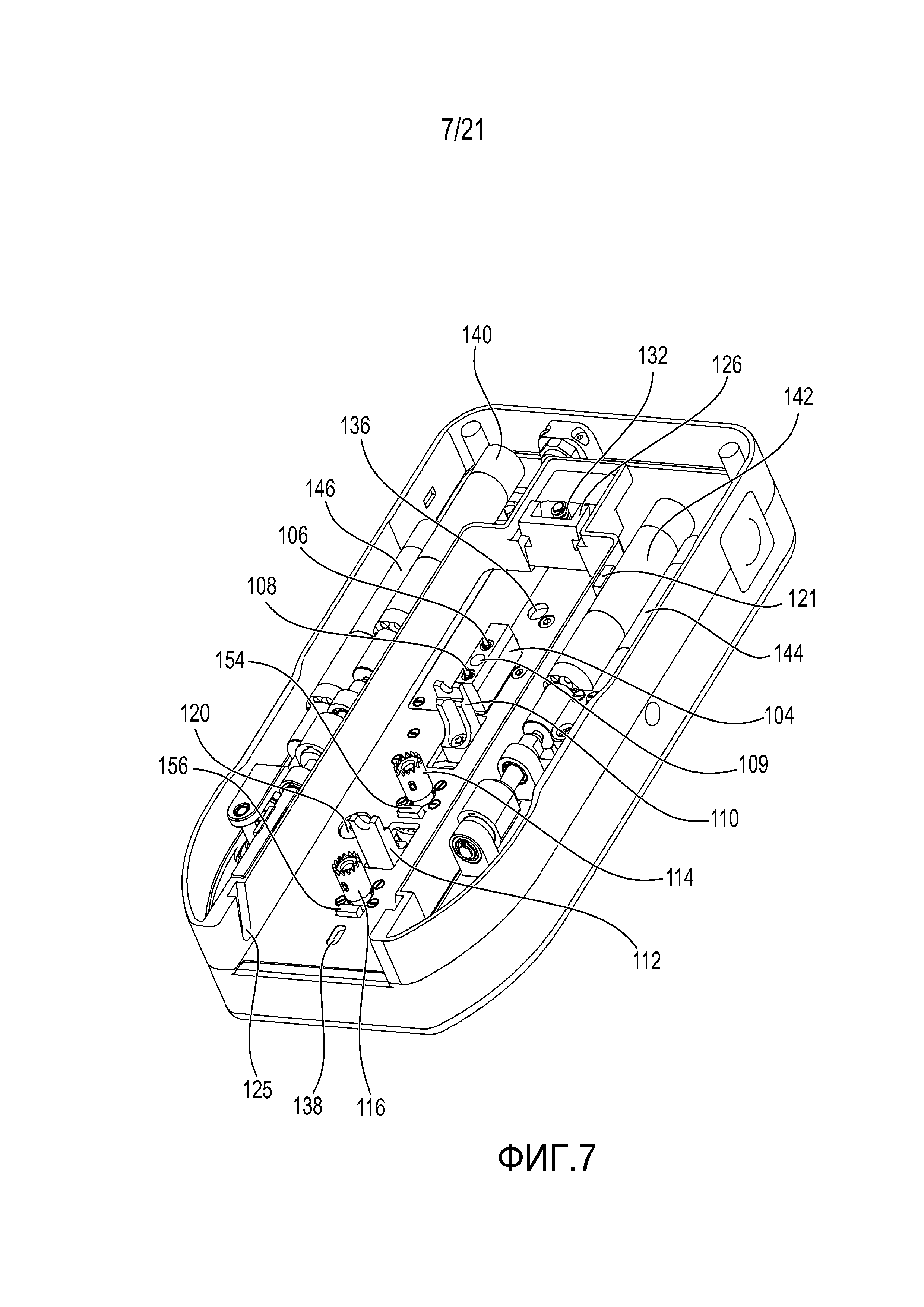
Фиг. 7 - блок сопряжения по фиг. 6 с удаленной верхней стороной корпуса;
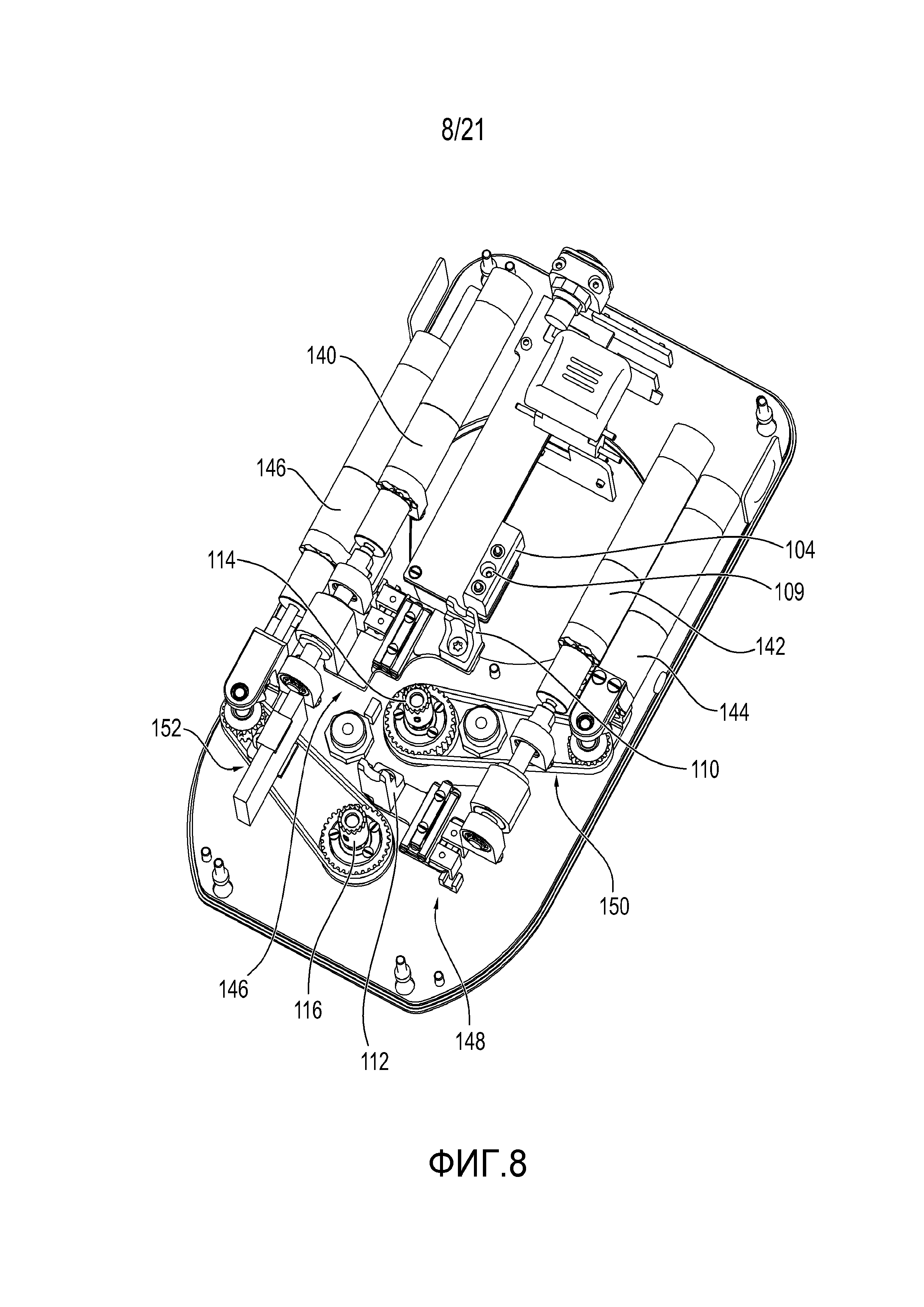
Фиг. 8 - блок сопряжения по фиг. 6 или 7 без верхнего сегмента корпуса;
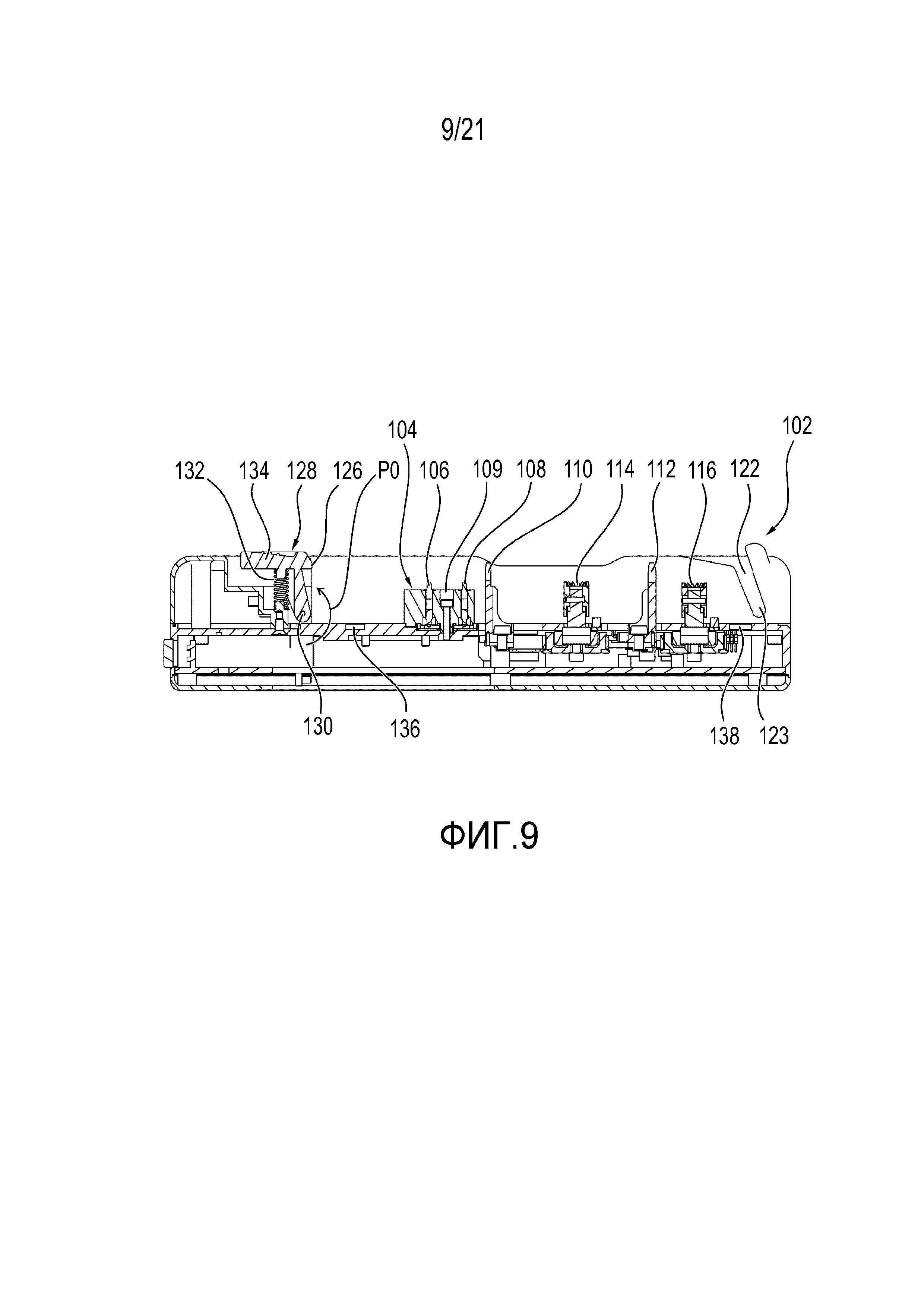
Фиг. 9 - продольный разрез блока сопряжения по фиг. 6-8;
Фиг. 10 - перспективное изображение стерильного шлюза с закрытыми и заблокированными стерильными заслонками;
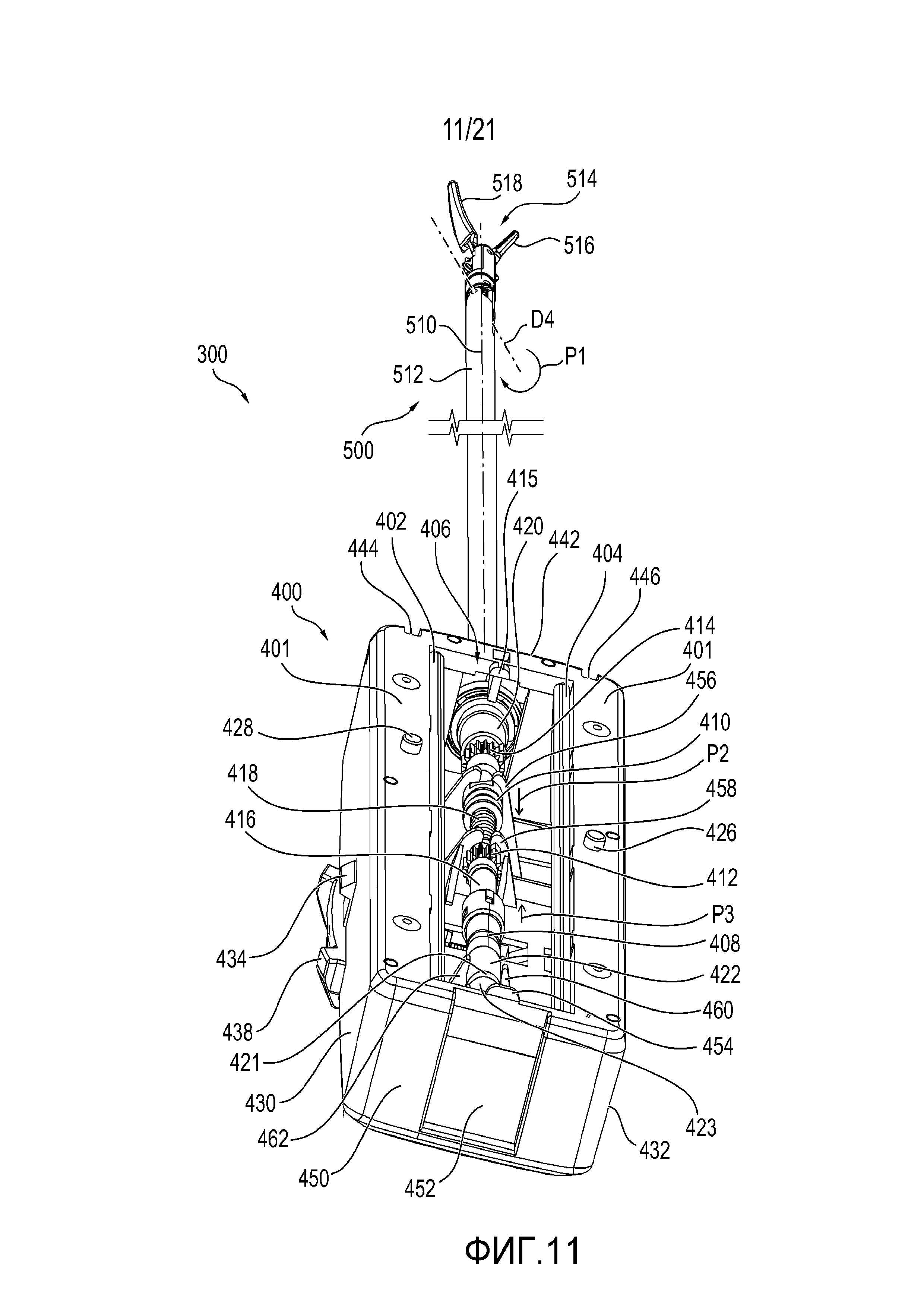
Фиг. 11 - перспективное изображение инструментального блока с открытыми стерильными заслонками стерильного блока;
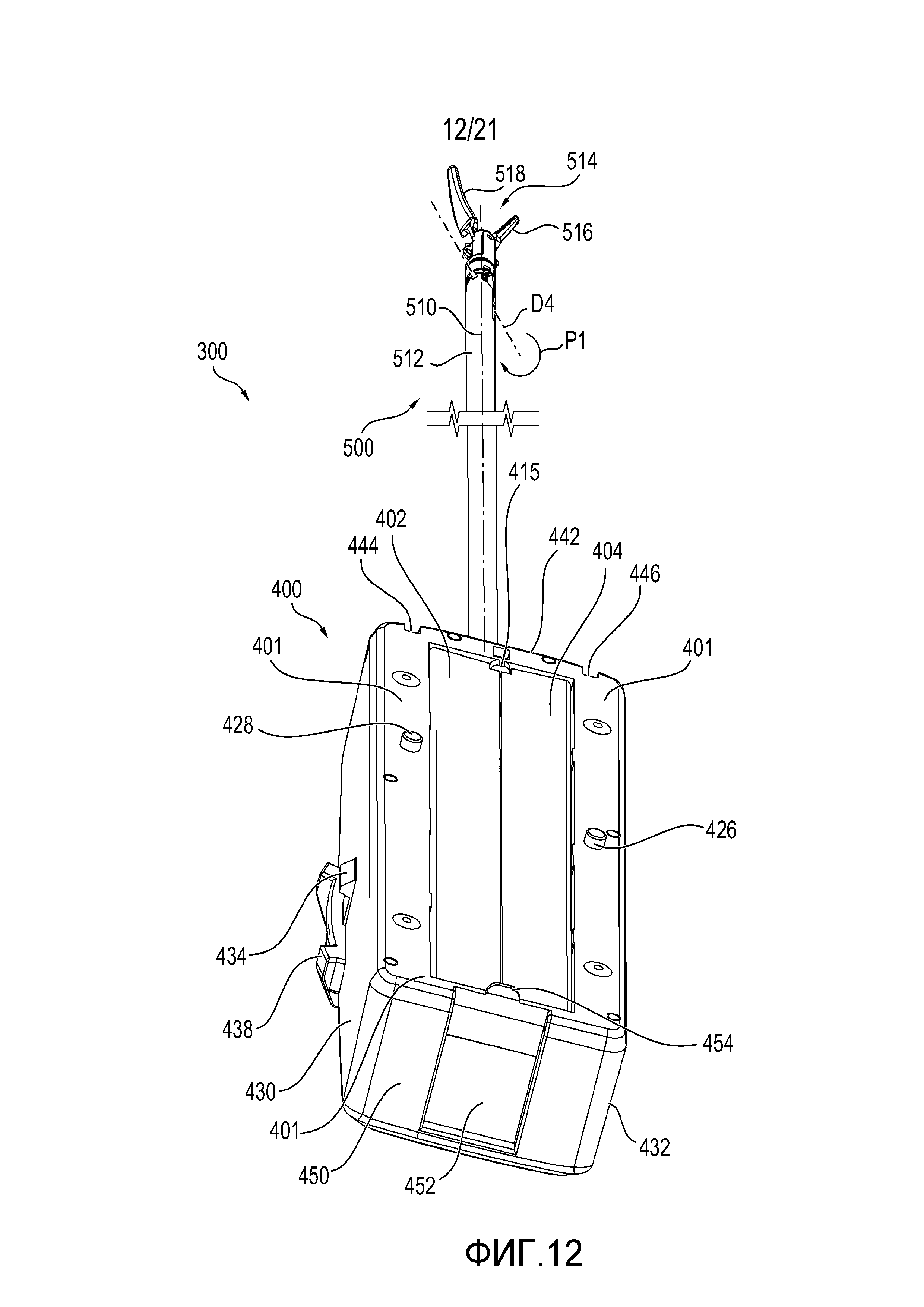
Фиг. 12 - перспективное изображение инструментального блока по фиг. 11 с закрытыми стерильными заслонками;
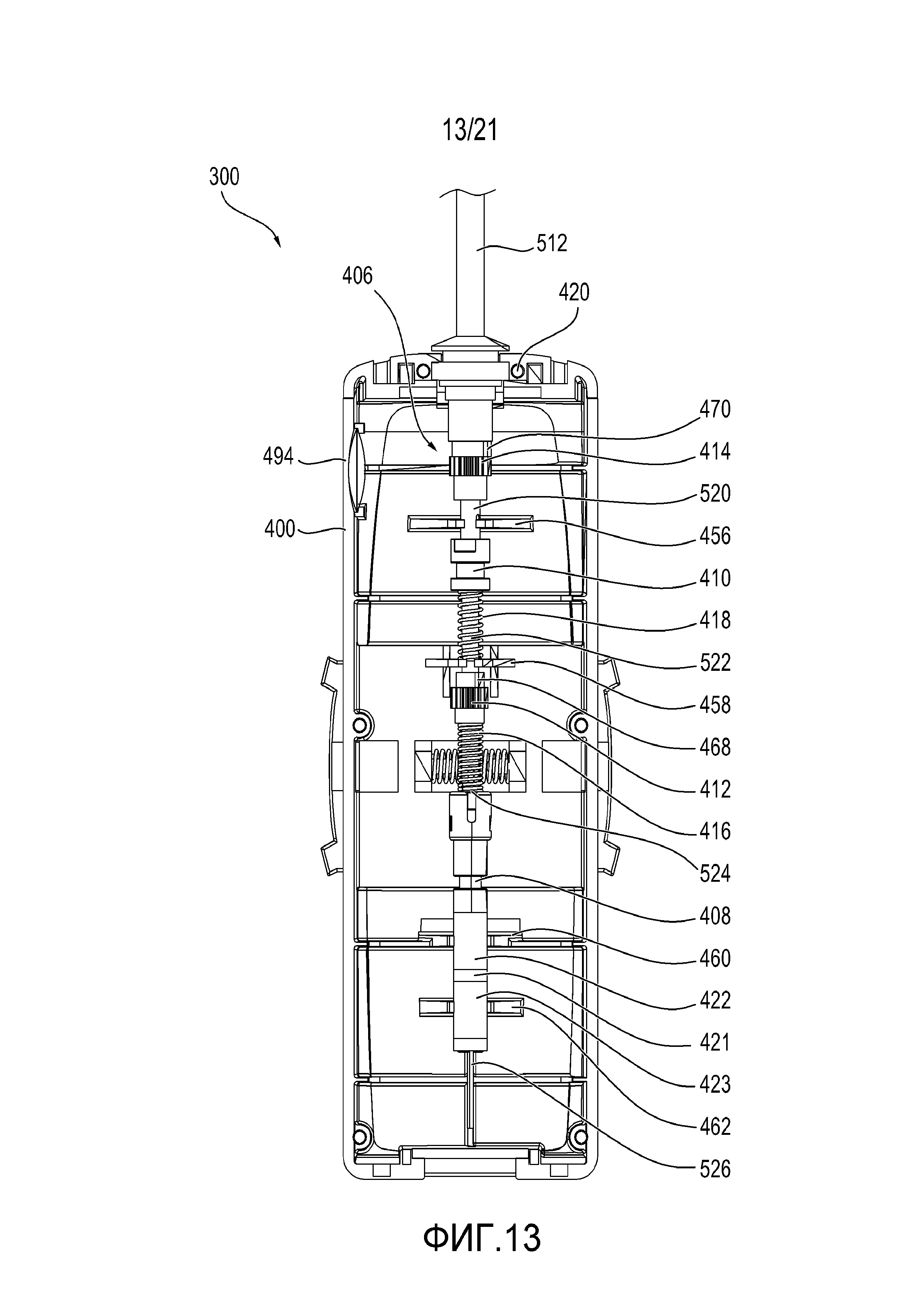
Фиг. 13 - инструментальный блок по фиг. 11 или 12 с удаленной донной пластиной;
Фиг. 14 - изображение в разрезе фрагмента инструментального блока по фиг. 13 с несколькими ведомыми с помощью приводных элементов блока сопряжения элементами;
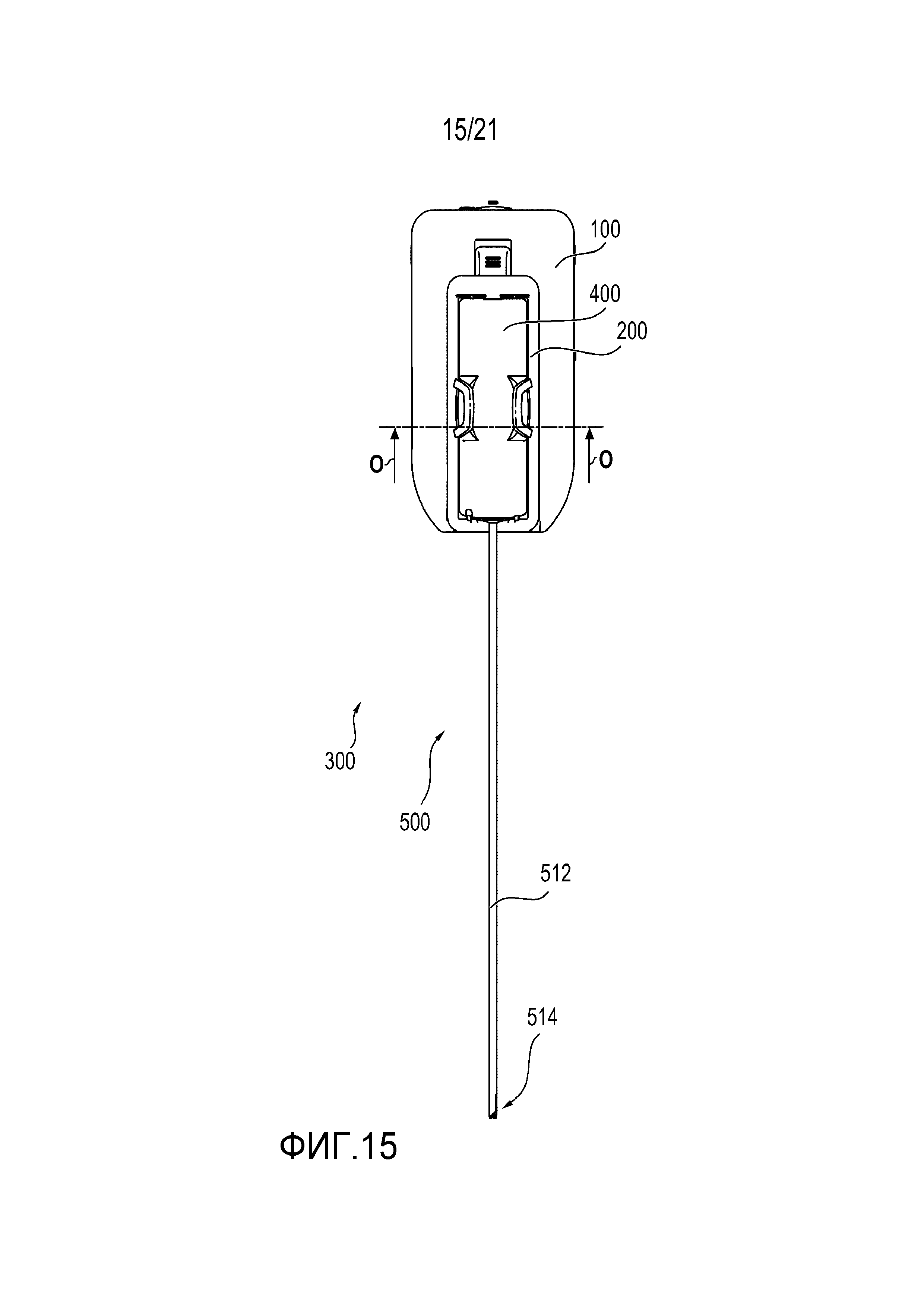
Фиг. 15 - вид сверху на систему из блока сопряжения, стерильного блока и инструментального блока;
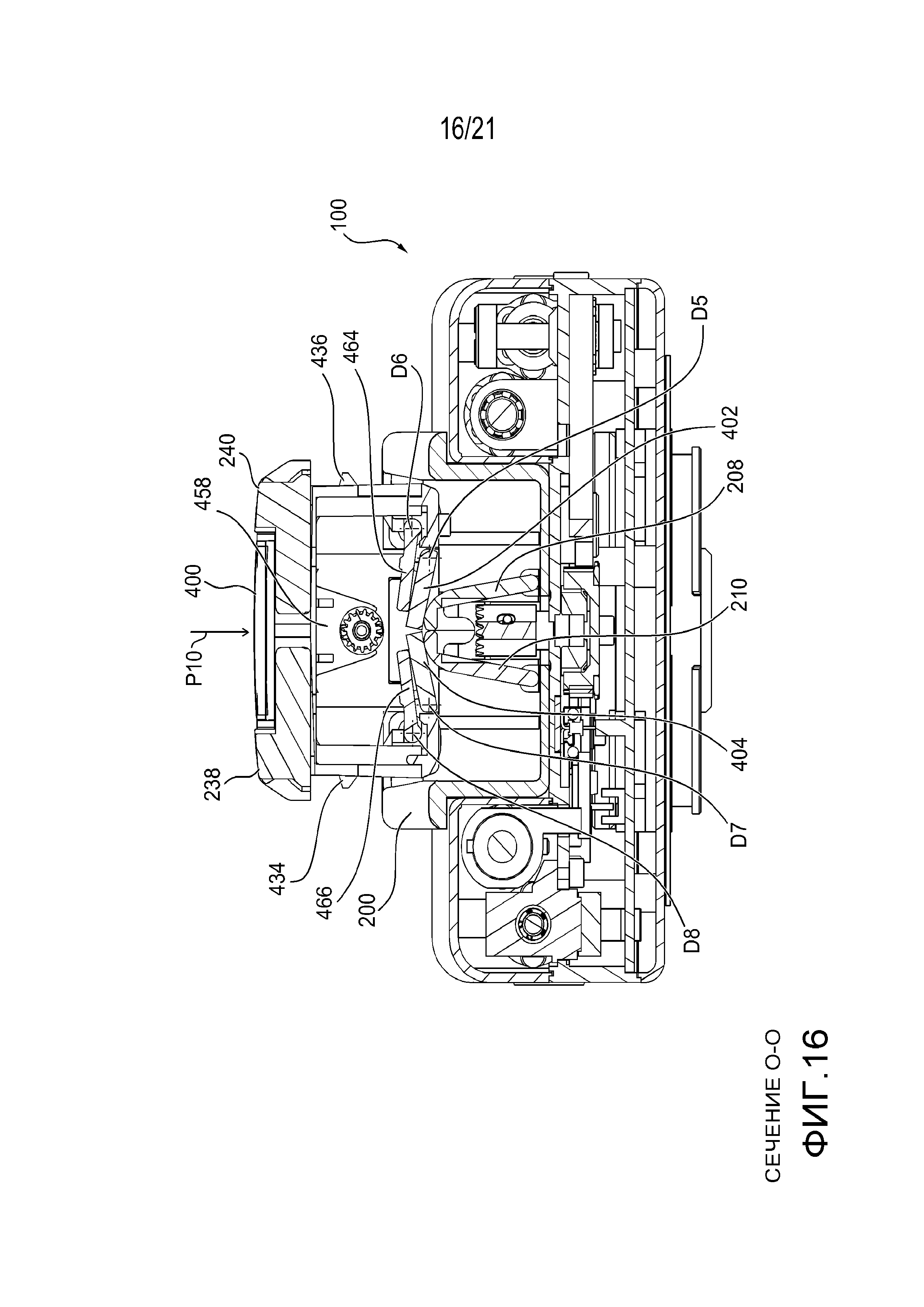
Фиг. 16 - изображение в разрезе системы по фиг. 15 вдоль линии сечения О-О в первом положении для соединения инструментального блока с сопряженным с блоком сопряжения стерильным шлюзом;
Фиг. 17 - изображение в разрезе системы по фиг. 15 вдоль линии сечения О-О во втором положении для соединения инструментального блока с сопряженным с блоком сопряжения стерильным шлюзом;
Фиг. 18 - изображение в разрезе системы по фиг. 15 вдоль линии сечения О-О в третьем положении для соединения инструментального блока с сопряженным с блоком сопряжения стерильным шлюзом;
Фиг. 19 - разрезанное изображение инструментального блока, стерильного шлюза и блока сопряжения в соединенном состоянии;
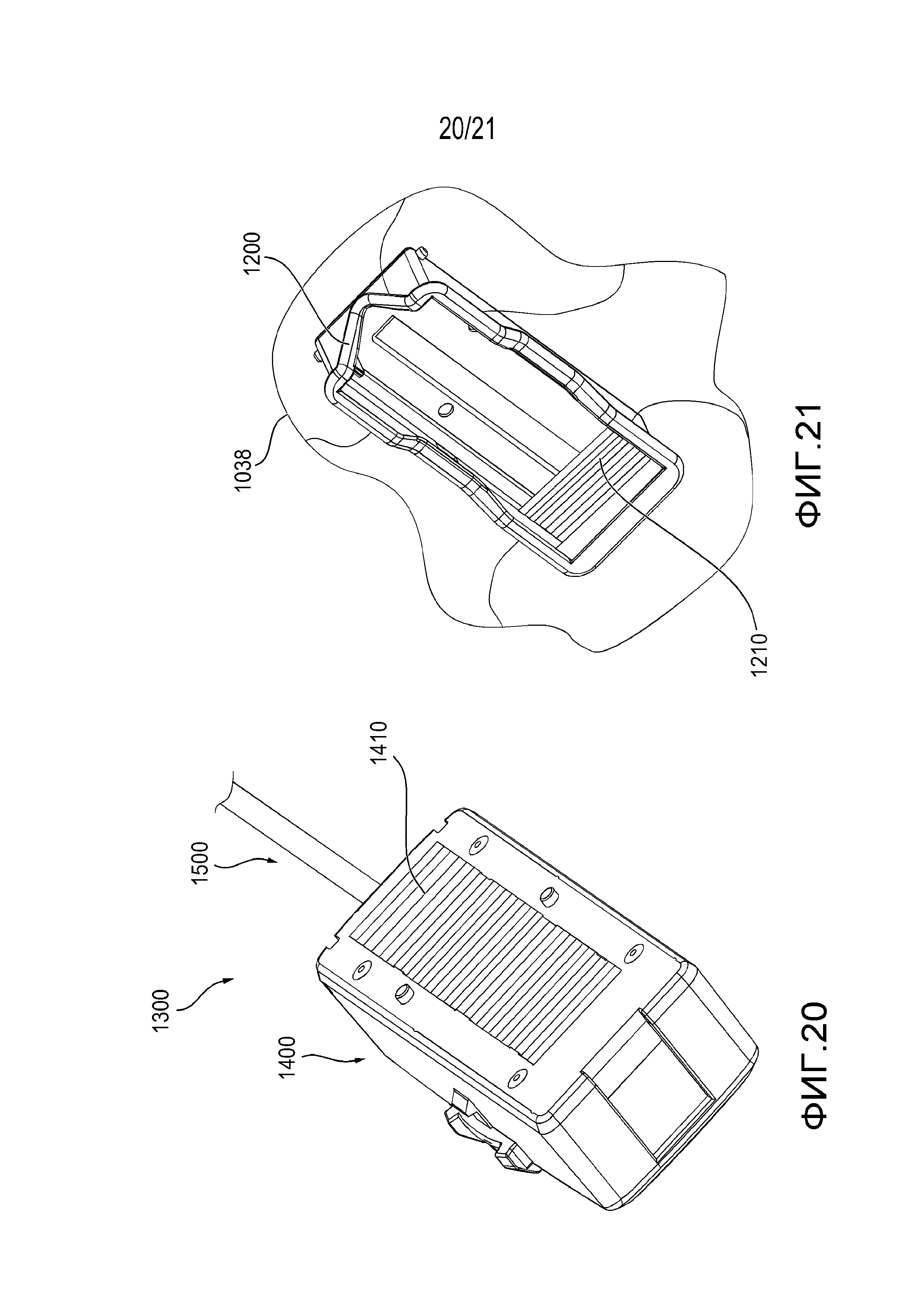
Фиг. 20 - фрагмент инструментального блока согласно второму варианту осуществления изобретения;
Фиг. 21 - стерильное перекрытие со стерильным шлюзом согласно второму варианту осуществления изобретения;
Фиг. 22 - фрагмент инструментального блока согласно третьему варианту осуществления изобретения; и
Фиг. 23 - стерильное перекрытие со стерильным шлюзом согласно третьему варианту осуществления изобретения.
Фиг. 1 показывает схематичное изображение системы 10 для роботизированной хирургии с манипулятором 12, который имеет штатив 14 и четыре манипулирующие руки 16a-16d. В других примерах осуществления изобретения манипулятор 12 может также иметь больше или меньше манипулирующих рук 16a-16d. Каждая манипулирующая рука 16a-16d соединена со стерильным инструментальным блоком 300a-300d посредством блока сопряжения манипулирующей руки 16a-16d. Инструментальный блок 300a-300d является стерильным и включает в себя наряду со стерильным блоком для сопряжения инструментального блока 300a-300d с блоком сопряжения манипулирующей руки 16a-16d хирургический инструмент, в частности, с исполнительным органом (концевой эффектор), причем исполнительный орган может перемещаться и/или приводиться в действие с помощью блока сопряжения манипулирующей руки 16а-16d. В качестве альтернативы к хирургическому инструменту инструментальный блок 300а-300d также может включать в себя оптический инструмент, в частности эндоскоп, и/или медицинский прибор, в частности, для применения/нанесения медикаментов, для выдачи омывающей жидкости и/или для всасывания омывающей жидкости и/или секрета.
Штатив 14 имеет стоящую на полу операционного зала ногу 24 штатива. Манипулирующие руки 16a-16d соединены с головкой 20 штатива 14. В случае других вариантов осуществления штатив также может представлять собой потолочный штатив.
Позиция головки 20 штатива может настраиваться с помощью первого приводного устройства 22 и с помощью расположенного в ноге 24 штатива второго приводного устройства 26. С помощью приводного устройства 22 руки 28, 30 штатива могут перемешаться друг относительно друга. С помощью приводного устройства 26 может изменяться наклон руки 30 штатива относительно установочной поверхности ноги 24 штатива и/или рука 30 штатива может поворачиваться вокруг вертикальной оси вращения. В общем, позиционирование головки 20 штатива осуществляется перед операцией пациента. Во время операции положение головки 20 штатива относительно стойки 32 операционного стола 34 обычно остается неизменным. Манипулятор 12 управляется с помощью блока 36 управления. Блок 36 управления через линии передачи данных и/или управления соединен с устройством 37 ввода-вывода, которое, в частности, выдает изображение операционного поля обслуживающему персоналу в реальном времени с помощью по меньшей мере одного блока индикации. Обслуживающий персонал делает ввод управляющих данных, посредством которых инструментальные блоки 300а-300d позиционируются и приводятся в действие во время операции пациента. Таким образом, устройство 37 ввода-вывода служит в качестве интерфейса «человек-машина».
Далее, блок 36 управления через соединение передачи данных и/или управления соединен с не представленным блоком управления операционного стола 34. Посредством этого соединения передачи данных и/или управления обеспечивается то, что положение поверхности для опирания пациента или сегментов поверхности для опирания пациента операционного стола 34 может изменяться только тогда, когда это ввиду позиционирования инструментальных блоков 300а-300d возможно без подвергания опасности оперируемого пациента.
Операционный стол 34, а также инструментальные блоки 300а-300d расположены в стерильной операционной области 39. Манипулирующие руки 16a-16d и штатив 14 не являются стерильными. Выступающие в стерильную операционную область 39 области манипулятора 12, то есть манипулирующие руки 16a-16d, головка 20 штатива и часть руки 28 штатива, стерильно упакованы в обозначенную штриховыми линиями стерильную гибкую оболочку 38, например стерильную пленку, так что они могут располагаться без опасности в стерильной операционной области 39. Устройство 37 ввода-вывода расположено за пределами стерильной области 39 и поэтому не должно стерильно упаковываться.
В случае нескольких операций инструментальные блоки 300а-300d должны многократно заменяться во время операции вследствие хода операции. Таким образом, между манипулирующей рукой 16a-16d и инструментальным блоком 300a-300d должно предусматриваться стерильное место сопряжения, которое обеспечивает то, что не стерильные части блока сопряжения манипулирующей руки 16a-16d даже после отделения инструментального блока 300a-300d стерильно перекрыты. Более того, посредством контакта стерильных элементов блока сопряжения манипулирующей руки 16a-16d загрязненные элементы инструментального блока 300a-300d после отделения инструментального блока 300a-300d от манипулирующей руки 16a-16d должны стерильно перекрываться с тем, чтобы инструментальный блок 300a-300d мог сняться в стерильной области 39 без того, чтобы загрязнились другие элементы в стерильной области 39. Для этого предусматривается стерильный шлюз между блоком сопряжения манипулирующей руки 16a-16d и инструментальным блоком 300a-300d, который имеет по меньшей мере одну шлюзовую заслонку, которая закрыта, когда никакой инструментальный блок 300a-300d не соединен со стерильным шлюзом, так что в таком случае нестерильный блок сопряжения экранирован от стерильной области 39 с помощью гибкой стерильной оболочки 38 и интегрированный в него стерильный шлюз экранирован от стерильной области 39.
Фиг. 2 показывает вид спереди манипулятора 12 согласно фиг. 1. Манипуляторные руки 16a-16d имеют каждая несколько сегментов 40а-58а, которые подвижны друг относительно друга с помощью интегрированных приводных устройств, так что инструментальные блоки 300a-300d могут без коллизий точно позиционироваться. Стерильные оболочки 38 для экранирования участка манипулирующих рук 16a-16d не представлены на фиг. 2. Сегменты манипулирующей руки 16а обозначены ссылочными позициями 40а-58а. Другие манипулирующие руки 16b-16d имеют такую же конструкцию и имеют не обозначенные на фиг. 2 из соображений обеспечения наглядности сегменты 40b-58b, 40с-58с и 40d-58d. Одни и те же элементы манипулирующих рук 16a-16d обозначены одними и теми же ссылочными цифрами и дополнительными буквами для отличия манипулирующих рук 16a-16d. Приведенные в последующем описании рассуждения касаются манипулирующей руки 16а и инструментального блока 300а, которые называются в дальнейшем как манипулирующая рука 16 и инструментальный блок 300. Сегменты 40а-58 манипулирующей руки 16а в дальнейшем называются как сегменты 40-58. Однако эти рассуждения в той же самой манере относятся к одинаково выполненным манипулирующим рукам 16b-16d и инструментальным блокам 300b-300d. Элементы с одинаковым строением и/или одинаковой функцией обозначены одними и теми же ссылочными позициями.
Фиг. 3 показывает перспективное представление участка манипулирующей руки 16 с блоком 100 сопряжения для сопряжения манипулирующей руки 16 с включающим в себя стерильный блок 400 инструментальным блоком 300. Для этого блок 100 сопряжения соединен с интегрированным в стерильную оболочку 38 стерильным шлюзом 200. Стерильный шлюз 200 выполнен с возможностью сопряжения и вновь отсоединения как с блоком 100 сопряжения, так и со стерильным блоком 400. На фиг. 3 стерильный шлюз 200 представлен в сопряжении как с блоком 100 сопряжения, так и со стерильным блоком 400. Блок 100 сопряжения расположен на дистальном конце телескопической системы 60.
Телескопическая система 60 имеет выполненные с возможностью смещения друг относительно друга участки 62, 64, 66 и представлены на фиг. 3 в выдвинутом состоянии. Участки 62, 64, 66 телескопической системы 60 могут вдвигаться и выдвигаться с помощью приводного устройства 68, так что хирургический инструмент 500 инструментального блока 300 может перемещаться вдоль продольной оси 510 инструментального хвостовика 512 вместе с блоком 100 сопряжения, стерильным шлюзом 200 и стерильным блоком 400. С помощью интегрированного в сегмент 52 приводного устройства сегмент 54 может вращаться вместе с выполненным в виде шарнирного рукава сегмента 56 вокруг оси 57 вращения. Сегмент 58 через передачу 59 сопряжения соединен с сегментом 56, так что сегмент 58 после активации соединенного с передачей 59 сопряжения приводным устройством может поворачиваться вокруг оси 61 вращения. Далее, блок 100 сопряжения расположен с возможностью поворота посредством не видимой на фиг. 3 передачи сопряжения относительно сегмента 66 вокруг оси 67 вращения. Эта передача сопряжения также выполнена с возможностью привода посредством соединенного с этой передачей сопряжения приводного устройства, так что при активации этого приводного устройства блок 100 сопряжения вращается вокруг оси 67 вращения. При этом приводные устройства передач сопряжения управляются таким образом, что продольная ось 510 инструментального хвостовика 512 при перемещении манипулирующей руки 16 и ее сегментов поворачивается вокруг неподвижной в пространстве точки 69 поворота, посредством которой продольная ось 510 введенного при операции предпочтительно посредством троакара в пациента инструментального хвостовика 512 затем вращается вокруг точки 69 поворота, так что гарантировано, что посредством перемещения инструмента 500 только незначительная нагрузка на пациента осуществляется в месте входа инструмента в пациента и, в частности, предотвращается повреждение пациента в месте входа инструментального хвостовика 512.
На фиг. 4 показано другое перспективное представление системы по фиг. 3, причем участки 62, 64, 66 телескопической системы 60 в отличие от фиг. 3 представлены во втянутом состоянии, вследствие чего инструментальный блок 300 сместился в направлении продольной оси 510 инструментального хвостовика 512 к проксимальному концу хирургического инструмента 500. Таким образом, посредством втягивания телескопической системы 60 инструментальный блок 300 сместился в направлении проксимального конца инструмента 500 вдоль продольной оси 510 инструмента 500. Однако при этом положение точки 59 поворота остается неизменным. Даже при повороте сегментов 56, 58, 60 вокруг оси 57 вращения точка 59 поворота остается неизменной в своем пространственном положении посредством соответствующего управления приводными устройствами передач 59 сопряжения, в которой соответствующее вращение сегмента 60 осуществляется вокруг оси 61 вращения, а блока 100 сопряжения вокруг оси 67 вращения. Далее, созданная посредством соответствующего привода передач сопряжения виртуальная ось вращения (не представлена), которая проходит параллельно осям 61, 67 вращения и перпендикулярно оси 57 вращения, проходит через точку 69 поворота.
В точке 69 поворота пересекаются ось 57 вращения выполненного в виде шарнирного рукава сегмента 56 и продольная ось 510 инструмента 500. Точка 69 поворота также называется как шарнирная точка.
Фиг. 5 показывает блок 100 сопряжения, стерильный шлюз 200, а также инструментальный блок 300 со стерильным блоком 400 и хирургическим инструментом 500, который имеет исполнительный орган 514, перед состыковкой стерильного шлюза 200 с блоком 100 сопряжения и перед последующей состыковкой стерильного блока 400 со стерильным шлюзом 200. Выполненная в виде стерильной пленки гибкая стерильная оболочка 38 на окружном присоединительном краю 202 стерильного шлюза 200 жестко соединена с ним посредством подходящего соединения, как, например, зажимное, клеевое и/или сварное соединение, так что указанная стерильная пленка вместе со стерильным шлюзом 200 образует замкнутое стерильное перекрытие вокруг подлежащих экранированию стерильной областью 39 не стерильных элементов 16, 100, как это также показано на фиг. 1, 3 и 4. Для лучшего представления на фиг. 5 показан только фрагмент указанной стерильной пленки вокруг стерильного шлюза 200. На последующих фигурах стерильная пленка частично не представлена.
Для сопряжения стерильного блока 400 с блоком 100 сопряжения стерильный шлюз 200 расположен между стерильным блоком 400 и блоком 100 сопряжения и позволяет в соединенном состоянии стерильного блока 400 с блоком 100 сопряжения непосредственное соединение (сопряжение) первого передаточного средства 102 блока 100 сопряжения и второго передаточного средства стерильного блока 400. Второе передаточное средство на фиг. 11 обозначено ссылочной позицией 406.
С помощью первого передаточного средства 102 в данном примере осуществления передается как механическая энергия, так и электрическая энергия между блоком 100 сопряжения и стерильным блоком 400. Для этого первое передаточное средство 102 блока 100 сопряжения имеет по меньшей мере четыре механических приводных элемента 110-116, а второе передаточное средство 406 стерильного блока 400 имеет четыре представленных на фиг. 11, ответных приводным элементам 110-116 ведомых элемента 412-418. Далее, первое передаточное средство 102 имеет электрический передаточный элемент 104 с двумя электрическими контактами 106, 108, а второе передаточное средство 406 имеет ответный электрическому передаточному элементу 104 первого передаточного средства 102 электрический передаточный элемент. Ответный электрический передаточный элемент включает в себя два представленных на фиг. 11 электрических контакта 422, 423.
В других примерах осуществления изобретения первые и вторые передаточные средства могут также включать в себя больше или меньше приводных элементов, ведомых элементов и электрических передаточных элементов, которые передают механическую и/или электрическую энергию через непосредственное сопряжение. При этом как непосредственное сопряжение рассматривается сопряжение передаточных средств, у которого не предусмотрено никаких других передаточных средств между первыми передаточными средствами и вторыми передаточными средствами для передачи механической и/или электрической энергии и/или оптических сигналов, причем не предусмотрены, в частности, никакие электрические, механические или оптические передаточные элементы в расположенном между блоком 100 сопряжения и стерильным блоком 400 стерильном барьере, как, например, стерильный шлюз 200. Кроме того, блок сопряжения 100 имеет блок 121 для считывания и записи радиочастотной идентификации (RFID), с помощью которого RFID-транспондер 494 стерильного блока 400 имеет возможность считывания и/или записи.
Фиг. 6 показывает схематичное перспективное изображение блока 100 сопряжения манипулирующей руки 16. Первое передаточное средство 102 блока 100 сопряжения имеет электрический передаточный элемент 104 с двумя электрическими контактами 106, 108, оптическое передаточное средство (средство сопряжения) 109 для передачи света и/или оптических сигналов, первый поступательный приводной элемент 110 и второй поступательный приводной элемент 112 соответственно для передачи поступательного движения, а также первый вращательный приводной элемент 114 и второй вращательный приводной элемент 116 для передачи поворотного движения. Первый и второй поступательный приводной элемент 110, 112 выполнены каждый в виде линейной подъемной вилки, а первый и второй вращательный приводной элемент 114, 116 выполнены каждый в виде приводной шестерни с торцевыми зубьями. Кроме того, блок 100 сопряжения имеет расположенный в углублении первый датчик 118 сопряжения, который обнаруживает (детектирует) образованный посредством выступающего из стерильного блока 400 первого детекторного штифта первый детекторный элемент, если стерильный шлюз 200 правильно соединен с блоком 100 сопряжения, а стерильный блок 400 правильно соединен со стерильным шлюзом 200. В этом случае первый детекторный штифт стерильного блока 400 выступает в углубление, в котором расположен первый датчик 118 сопряжения, так что он обнаруживает наличие служащего в качестве первого детекторного элемента первого детекторного штифта. Первый детекторный штифт показан на фиг. 11 и обозначен там ссылочной позицией 426.
Блок 100 сопряжения имеет второй датчик 120 сопряжения, который расположен сбоку рядом с приводными элементами 112, 114 в другом углублении, как это отчетливо видно на фиг. 5. Второй датчик 120 сопряжения обнаруживает образованный посредством второго детекторного штифта стерильного блока 400 второй детекторный элемент, если как блок 100 сопряжения правильно соединен со стерильным шлюзом 200, так и стерильный шлюз 200 правильно соединен со стерильным блоком 400. Второй детекторный штифт показан на фиг. 11 и обозначен там ссылочной позицией 428. Таким образом, с помощью датчиков 118, 120 сопряжения надежно устанавливается, правильно ли сопряжен стерильный блок 400 с блоком 100 сопряжения, так что возможна непосредственная передача между первым передаточным средством 102 блока 100 сопряжения и вторым передаточным средством стерильного блока 400. Для соединения блока 100 сопряжения со стерильным шлюзом 200 блок 100 сопряжения имеет противолежащие друг другу направляющие канавки 122, 124, в которые вводятся направляющие штифты 204, 206 стерильного шлюза 200, пока они не достигнут переднего конца 123, 125 соответствующей направляющей канавки 122, 124, как это показано на фиг. 10. Направляющие штифты 204, 206 выступают наружу на первом конце стерильного шлюза 200 на противоположных сторонах, как это можно видеть на фиг. 5 и 10. Затем противолежащий второй конец стерильного шлюза 200 выдавливается вниз, так что стерильный шлюз 200 поворачивается вокруг проходящей через направляющие штифты 204, 206 оси вращения, пока фиксирующий носик 126 фиксирующего элемента 128 не войдет в ответную фиксирующую область стерильного шлюза 200.
Фиг. 7 показывает блок 100 сопряжения по фиг. 6 с удаленной верхней стороной корпуса, а фиг. 8 - блок 100 сопряжения по фиг. 6 и 7 без верхнего сегмента корпуса. Блок 100 сопряжения имеет в целом четыре приводных мотора 140-146, которые соответственно выполнены как электродвигатели постоянного тока с тахометром, так что блоку 36 управления в любое время известен угол поворота соответствующего мотора и это может учитываться для дальнейшего управления. Первый приводной мотор 140 посредством первой линейной сопряженной передачи 147 сопряжен с первым поступательным приводным элементом 110, который при активации приводного мотора 140 посредством блока 36 управления выполняет поступательное приводное движение. Второй приводной мотор 142 посредством второй линейной сопряженной передачи 148 сопряжен со вторым поступательным приводным элементом 112, так что при приводном движении второго приводного мотора 142 второй поступательный приводной элемент 112 выполняет поступательное приводное движение. Третий приводной мотор 144 посредством первой ступени 150 передачи сопряжен с первым вращательным приводным элементом 114, так что при приводном движении третьего приводного мотора 144 вращается первый вращательный приводной элемент 114. Четвертый приводной мотор 146 посредством второй ступени 152 передачи сопряжен со вторым вращательным приводным элементом 116, так что он при приводном движении четвертого приводного мотора 146 совершает вращательное движение.
Фиг. 9 показывает продольный разрез блока 100 сопряжения. Деблокирующая кнопка 128 расположена с возможностью поворота вокруг оси 130 вращения и посредством пружины 132 удерживается в своем показанном на фиг. 9 положении фиксации. Для разъединения фиксирующего соединения производится нажатие одним пальцем на деблокирующую кнопку 134 фиксирующего элемента 128, так что пружина 132 натягивается и фиксирующий элемент 128 вместе с фиксирующим носиком 126 поворачивается в направлении стрелки Р0, так что фиксирующий носик 126 выводится из зацепления с ответным фиксирующим элементом стерильного шлюза 200. Вследствие этого находящийся до этого в зацеплении с фиксирующим носиком 126 второй конец стерильного шлюза 200 поворачивается прочь из блока 100 сопряжения. После того как этот второй конец стерильного шлюза 200 был повернут прочь из бока 100 сопряжения, стерильный шлюз 200 может полностью отделяться от блока 100 сопряжения за счет того, что стерильный шлюз 200 с помощью находящихся в зацеплении с направляющими канавками 122, 124 направляющими штифтами 204, 206 вытягивается вдоль направляющих канавок 122, 124 из него до тех пор, пока направляющие элементы 204, 206 не прекратят зацепляться с направляющими канавками 122, 124. Между направляющими канавками 122, 124 и фиксирующим элементом 128 имеется образованная посредством соответствующего углубления в корпусе блока 100 сопряжения приемная область, которая в данном примере осуществления по меньшей мере частично охватывает стерильный шлюз 200 на тех сторонах и со стороны дна.
Фиг. 10 показывает вид в перспективе стерильного шлюза 200 с закрытыми шлюзовыми заслонками 208, 210. Стерильный шлюз 200 имеет дно 212, в котором предусмотрены два перекрываемых с помощью шлюзовых заслонок 208, 210 отверстия 214, 216. Шлюзовые заслонки 208, 210 через шарниры соединены с возможностью поворота с дном 212. С помощью этих шарниров шлюзовые заслонки 208, 210 могут поворачиваться из показанного на фиг. 10 закрытого состояния в открытое состояние. В открытом состоянии шлюзовых заслонок 208, 210 может осуществляться непосредственное сопряжение приводных элементов 100-116 блока 100 сопряжения с ведомыми элементами стерильного блока 400. Далее, при открытых шлюзовых заслонках 208, 210 может осуществляться непосредственное сопряжение электрического передаточного элемента 104 блока 100 сопряжения с электрическим передаточным элементом стерильного блока 400.
Далее, стерильный шлюз 200 имеет две боковые стенки 218, 220, переднюю торцевую стенку 222 и заднюю торцевую стенку 224. На наружных сторонах боковых стенок 218, 220 и торцевых стенок 222, 224 образован окружной край 202, с которым - как уже описывалось в связи с фиг. 5 - подходящим образом соединена стерильная пленка стерильного перекрытия 38.
На внутренней стороне передней торцевой стенки 222 соответственно сбоку рядом с V-образным вырезом 226 торцевой стенки 222 жестко расположены два направляющих и деблокирующих ребра 228, 230, которые в случае соединения стерильного шлюза 200 со стерильным блоком 400 служат в качестве деблокирующих элементов для деблокирования стерильных заслонок стерильного блока 400.
В дне 212 стерильного шлюза 200 имеются первое детекторное окно 232 и второе детекторное окно 234 в форме сквозных отверстий, через которые проводятся уже упомянутые детекторные элементы 426, 428 стерильного блока 400, так что они могут обнаруживаться первым датчиком 118 сопряжения и вторым датчиком 120 сопряжения блока 100 сопряжения.
На переднем и заднем конце шлюзовых заслонок 208, 210 предусмотрено соответственно по направляющему гофру 236-242. Передние направляющие гофры 236, 238 не функционируют. В задние направляющие гофры 240, 242 в закрытом состоянии шлюзовых заслонок 208, 210 входят зубцы 246, 248 направляющей вилки 244. Направляющая вилка 244 с помощью пружины прижимается в свое верхнее показанное на фиг. 10 положение и посредством входа ее зубцов 246, 248 в направляющие гофры 240, 242 закрывает шлюзовые заслонки 208, 210 и удерживает их в закрытом положении. Шлюзовые заслонки 208, 210 за счет вхождения зубцов 246, 248 вилки не могут разжиматься, так что не стерильное передаточное средство 102 блока 100 сопряжения при закрытых шлюзовых заслонках 208, 210 надежно перекрыто и не стерильные элементы блока 100 сопряжения надежно экранированы стерильной областью 39.
В боковых стенках 218, 220 предусмотрен соответственно фиксирующий гофр 250, 252, в который входит фиксирующий элемент стерильного блока 400 при соединении стерильного шлюза 200 со стерильным блоком 400. На задней торцевой стенке 224 стерильного шлюза 200 предусмотрено направляющее ребро 254, которое при соединении стерильного шлюза 200 со стерильным блоком 400 входит в направляющую канавку 452 стерильного блока 400, как это показано на фиг. 11.
На наружной стороне задней торцевой стенки 224 стерильного шлюза 200 выполнен фиксирующий носик, в который входит фиксирующий носик 126 фиксирующего элемента 128 блока 100 сопряжения, когда блок 100 сопряжения соединен со стерильным шлюзом 200.
Как видно из фиг. 10, боковые стенки 218, 220, торцевые стенки 222, 224 и дно 218 формируют ванну корпуса, в которую по меньшей мере частично может вставляться стерильный блок 400 для соединения стерильного блока 400 с блоком 100 сопряжения. Таким образом, ванна корпуса служит, в общем, в качестве первой соединительной области 266 стерильного шлюза 200. Наружная сторона стерильного шлюза 200 служит в качестве второй соединительной области 268, с помощью которой стерильный шлюз 200 может соединяться с блоком 100 сопряжения.
Фиг. 11 показывает перспективное изображение инструментального блока 300 со стерильным блоком 400 и хирургическим инструментом 500. На проксимальном конце имеющего возможность вращения наружного инструментального хвостовика 512 расположен имеющий возможность сгибания и вращения исполнительный орган 512 с имеющими возможность приведения в действие захватными элементами 516, 518. Движения исполнительного органа 514 могут выполняться с помощью приводных элементов 110-116 блока 100 сопряжения и ведомых элементов 408-414 стерильного блока 400, когда стерильный блок 400 через стерильный шлюз 200 соединен с блоком 100 сопряжения. Стерильный блок 400 имеет стерильные заслонки 402, 404, которые на фиг. 11 показаны в открытом состоянии, а на фиг. 12 - в закрытом состоянии. Внутри стерильного блока 400 расположено второе передаточное средство, которое является видимым при открытых стерильных заслонках 402, 404 и обозначено ссылочной позицией 406. Второе передаточное средство 406 включает в себя находящийся при соединении с блоком сопряжения в зацеплении с первым поступательным приводным элементом 110 первый поступательный ведомый элемент 408 и находящийся в зацеплении со вторым поступательным приводным элементом 112 блока 100 сопряжения второй поступательный ведомый элемент 410, каждый из которых служит для передачи поступательного движения. Далее, сопрягаемый с первым вращательным приводным элементом 114 блока 100 сопряжения, первый вращательный ведомый элемент 412, а также находящийся в зацеплении со вторым вращательным приводным элементом 116 блока 100 сопряжения, второй вращательный ведомый элемент 414 соответственно предусмотрены для передачи вращательного движения. В случае соединенного с блоком 100 сопряжения хирургического инструмента 500 исполнительный орган 514 поворачивается вокруг оси D4 откидывания в направлении стрелки Р1 на 90 градусов, если второй поступательный ведомый элемент 410 стерильного блока 400 перемещается вторым поступательным приводным элементом 112 блока 100 сопряжения в направлении стрелки Р2. В случае перемещения первого поступательного ведомого элемента 408 в направлении стрелки Р3 захватные элементы 516, 518 исполнительного органа 514 раздвигаются и последовательно движутся в противоположных направлениях. В случае приведения первого вращательного ведомого элемента 412 стерильного блока 400 с помощью первого вращательного приводного элемента 114 блока 100 сопряжения исполнительный орган 514 может вращаться независимо от инструментального хвостовика 512. С помощью второго вращательного ведомого элемента 414 в случае соединения со вторым вращательным приводным элементом 116 блока 100 сопряжения и приведения им в действие может осуществляться вращение инструментального хвостовика 512 вокруг его продольной оси 510, чтобы вращать положение оси D4 откидывания исполнительного органа 514 вокруг оси 510 вращения наружного инструментального хвостовика 512 без того, чтобы сам исполнительный орган 514 вращался совместно.
Далее, предусмотрена первая пружина 416, которая выдавливает первый поступательный ведомый элемент 408 стерильного блока 400 в его конечное положение против направления стрелки Р3. Кроме того, предусмотрена вторая пружина 418, которая выдавливает второй поступательный ведомый элемент 410 стерильного блока 400 в его концевое положение против направления стрелки Р2. Далее, стерильный блок 400 имеет опору 420 для вращательного опирания наружного инструментального хвостовика 512 в стерильном блоке 400. В качестве альтернативы хирургическому инструменту 500 со стерильным блоком 400 могут сопрягаться/соединяться также другие инструменты, например ножницы, иглодержатели, оптические инструменты, промывочные блоки, отсасывающие блоки, инструменты высокочастотной хирургии и другие используемые при операциях, в частности при лапароскопических операциях, инструменты, причем вторые передаточные средства 406 рассчитаны для реализации соответствующих функций.
Второе передаточное средство 406 согласно второму примеру осуществления включает в себя электрический передаточный элемент с первым, выполненным в виде контактного (токосъемного) кольца электрическим контактом 422 и вторым, выполненным в виде токосъемного кольца электрическим контактом 423, которые при сопряжении стерильного блока 400 с блоком 100 сопряжения через стерильный шлюз 200 вместе с электрическими контактами 106, 108 блока 100 сопряжения создают электрическое соединение для передачи высокочастотной электрической энергии для высокочастотной хирургии. В случае других примеров осуществления также могут отсутствовать какие-либо электрические передаточные средства.
Стерильный блок 400 имеет два выступающих кулачка 415, 417, которые при вводе стерильного блока 400 в стерильный шлюз 200 по меньшей мере настолько разжимают деблокированные стерильные заслонки 208, 210, чтобы кулачки 415, 417 оказались расположенными между стерильными заслонками 208, 210. При дальнейшем вводе стерильного блока 400 в стерильный шлюз 200 клиновидные захватные элементы 456-462 стерильного блока 400 еще больше разжимают стерильные заслонки 208, 210 до тех пор, пока они не будут расположены в своей показанной на фиг. 18 открытой позиции.
Показанная вверху на фиг. 11 и 12 донная пластина 401 стерильного блока 400, как уже было упомянуто, имеет два выполненных в виде выступающих детекторных штифтов детекторных элемента 426, 428. При соединении стерильного блока 400 с блоком 100 сопряжения с расположенным между стерильным блоком 400 и блоком 100 сопряжения стерильным шлюзом 200 детекторный элемент 426 выступает через первое детекторное окно 232 стерильного шлюза 200 в углубление первого датчика 118 сопряжения блока 100 сопряжения, а второй детекторный элемент 428 через второе детекторное окно 234 выступает в углубление второго датчика 120 сопряжения блока 100 сопряжения. В случае обнаружения (детектирования) детекторных элементов 426, 428 с помощью датчиков 118, 120 сопряжения может определяться корректное сопряжение (соединение) стерильного шлюза 200 с блоком 100 сопряжения и стерильного блока 400 со стерильным шлюзом 200, так что лишь после обнаружения детекторных элементов 426, 428 с помощью датчиков 118, 120 сопряжения привод передаточных элементов 110-116 деблокируется блоком управления. Далее, передача высокочастотной энергии деблокируется только после корректного обнаружения детекторных элементов 426, 428 с помощью датчиков 118, 120 сопряжения через передаточные элементы 106, 108.
Кроме того, стерильный блок 400 имеет два расположенных на противоположных боковых стенках 430, 432 фиксирующих элемента 434, 436, которые могут приводиться в действие с помощью выступающего из боковой стенки 430, 432 исполнительного элемента 438, 440. Фиксирующие элементы 434, 436 входят в предусмотренные в боковых стенках 218, 220 стерильного шлюза 200 фиксирующие гофры 250, 252, когда стерильный блок 400 корректно соединен со стерильным шлюзом 200.
Передняя торцевая стенка 442 стерильного блока 400 имеет две канавки 444, 446, в которые вводятся направляющие и деблокирующие ребра 228, 230 стерильного шлюза 200 при соединении стерильного блока 400 со стерильным шлюзом 200 и при этом деблокируют стерильные заслонки 402, 404.
Далее, направляющее ребро 254 стерильного шлюза 200 входит в имеющуюся на задней торцевой стороне 450 стерильного блока 400 направляющую канавку 452. У нижнего конца направляющей канавки 452 из донной пластины 401 наружу выступает исполнительное ребро 454, которое при вводе стерильного блока 400 в стерильный шлюз 200 надавливает вниз на направляющую вилку 244 и за счет этого устраняет блокировку шлюзовых заслонок 208, 210 направляющей вилкой 244.
Фиг. 13 показывает инструментальный блок 300 согласно фиг. 11 и 12, причем донная пластина 401 стерильного блока 400 была удалена. Фиг. 14 показывает представление в разрезе фрагмента инструментального блока 300 согласно фиг. 13 с несколькими ведомыми с помощью приводных элементов 110-116 блока 100 сопряжения элементами 408-414. Выполненный в виде зубчатого колеса второй вращательный ведомый элемент 414 без возможности проворота соединен с наружным инструментальным хвостовиком 512 и вторым датчиком 470 углового положения для детектирования вращения наружного инструментального хвостовика 512. Второй датчик 470 углового положения в одном месте своей периферии имеет выступающий кулачок, который может детектироваться с помощью второго датчика 156 положения блока 100 сопряжения, когда кулачок расположен напротив второго датчика 156 положения.
Второй поступательный ведомый элемент 410 соединен с первым внутренним инструментальным хвостовиком 520, так что при поступательном движении второго поступательного ведомого элемента 410 первый внутренний инструментальный хвостовик 520 перемещается поступательно.
Первый вращательный ведомый элемент 412 соединен без возможности проворота с первым датчиком 468 углового положения и без возможности проворота со вторым внутренним инструментальным хвостовиком 522. В одинаковой со вторым датчиком 470 углового положения манере первый датчик 468 углового положения на одном месте своей периферии имеет выступающий кулачок, который может детектироваться с помощью первого датчика 154 положения блока 100 сопряжения, когда кулачок расположен напротив этого первого датчика 154 положения. Второй инструментальный хвостовик 522 служит для вращения исполнительного органа в независимости от углового положения наружного инструментального хвостовика 512. Первый внутренний инструментальный хвостовик 520 служит для отклонения (изменения углового положения) исполнительного органа 514.
Первый поступательный ведомый элемент 408 соединен с третьим внутренним инструментальным хвостовиком 524 для передачи поступательного приводного движения. Третий внутренний инструментальный хвостовик 524 служит, в частности, для осуществления «разевающего» частичного движения захватных элементов 516, 518 исполнительного органа 514, которые представлены, в частности, на фиг. 11.
В случае инициализации непосредственно после соединения стерильного блока 400 с блоком 100 сопряжения осуществляется вращение вращательных ведомых элементов 412, 414 вместе с датчиками 468, 470 углового положения соответственно максимально на 360 градусов, вследствие чего определяется и настраивается точное начальное поворотное положение наружного инструментального хвостовика 512, соответственно второго внутреннего инструментального хвостовика 522, исходя из чего блок 36 управления определяет точное поворотное положение соответствующего инструментального хвостовика 512, 522 и непрерывно контролирует его с помощью согласованного в соответствующем приводном моторе 144, 146 тахогенератора, так что точное угловое положение (т.е. угла поворота) соответствующего инструментального хвостовика 512, 522 в любой момент времени известно блоку 36 управления и может учитываться при дальнейшем управлении приводными моторами 140-146.
Между образованными в виде контактных колец электрическими контактами 422 и 423 имеется оптическое место 412 сопряжения (интерфейс), которое служит также для взаимной электрической изоляции электрических контактов 422, 423. Электрические контакты 422, 423 соединены с кабелями, которые проведены в третьем внутреннем инструментальном хвостовике 524 к захватным элементам 516, 518 исполнительного органа 514.
Если необходимо, то через третий внутренний хвостовик 524 могут проводиться другие кабели и/или оптические волокна (световоды) к исполнительному органу 514.
На показанном на фиг. 14 изображении в разрезе хорошо видно соосное расположение наружного инструментального хвостовика 512 и внутренних инструментальных хвостовиков 520-526 инструментов. V-образные элементы 456-462 служат в качестве опорных ребер для опирания внутренних хвостовиков 520-526, причем внутренние хвостовики 520-526 установлены непосредственно или опосредованно с возможностью вращения в опорных ребрах 520-526.
Фиг. 15 показывает вид сверху на систему с блоком 100 сопряжения, стерильным шлюзом 200 и инструментальным блоком 300, который включает в себя стерильный блок 400 и стерильный хирургический инструмент 500. Фиг. 16 показывает изображение в разрезе системы по фиг. 15 вдоль линии O-O разреза в первом положении непосредственно перед соединением стерильного блока 400 инструментального блока 300 с уже сопряженным с блоком 100 сопряжения стерильным шлюзом 200. Фиг. 17 показывает изображение в разрезе системы по фиг. 15 вдоль линии O-O разреза во втором положении при соединении стерильного блока 400 инструментального блока 300 с уже сопряженным с блоком 100 сопряжения стерильным шлюзом 200. Фиг. 18 показывает изображение в разрезе системы по фиг. 15 вдоль линии O-O разреза в третьем положении, в котором стерильный блок 400 инструментального блока 300 соединен с сопряженным с блоком 100 сопряжения стерильным шлюзом 200, так что первое передаточное средство 102 блока 100 сопряжения для непосредственного сопряжения находится в зацеплении с передаточными элементами вторых передаточных средств 406. В показанном на фиг. 16 положении направляющие заслонки 464, 466 перемещены посредством введения направляющих и деблокирующих ребер 228, 230 в канавки 444, 446 и вследствие этого уже были перемещены вдоль их оси D6, D8 вращения в направлении стрелки Р4, Р5 из их заблокированного положения в их разблокированное положение, так что стерильные заслонки 402, 404 были нажаты вместе с направляющими заслонками 464, 466 посредством перемещения стерильного блока 400 в направлении стрелки Р10 и вызванного этим контакта стерильных заслонок 402, 404 со шлюзовыми заслонками 208, 210. Вследствие этого стерильный блок 400 оказывается глубже в предусмотренной для приема стерильного блока 400 приемной области стерильного шлюза 200, так что исполнительное ребро 454 входит в зацепление с направляющей вилкой 244 и поворачивает ее против силы натяжения пружины направляющей вилки. Вследствие этого зубцы 246, 248 направляющей вилки 244 находятся в зацеплении с направляющими гофрами 240, 242 так, что шлюзовые заслонки 208, 210 могут разжиматься посредством кулачков 415, 417 и за счет этого могут открываться. При дальнейшем перемещении стерильного блока 400 в направлении стрелки Р10 V-образные захватные элементы 458-462 входят в зацеплении со шлюзовыми заслонками 208, 210 и вытесняют их и стерильные заслонки 402, 404 вместе с направляющими заслонками 464, 466 далее наружу в их показанное на фиг. 18 полностью открытое положение. Посредством контакта шлюзовых заслонок 208, 210 со стерильными заслонками 402, 404 они вместе с направляющими заслонками 464, 466 открываются далее до тех пор, пока все заслонки 208, 210, 402, 404, 464, 466 не будут расположены в показанном на фиг. 18 открытом положении. При обратном перемещении стерильного блока 400 при извлечении стерильного блока 400 из стерильного шлюза 200, т.е. из показанного на фиг. 18 положения в показанное на фиг. 16 положение против направления стрелки Р10, происходит обратная последовательность движений стерильных, направляющих и шлюзовых заслонок, так что эти заслонки, в частности, посредством силы натяжения пружин закрываются и зубцы 246, 248 направляющей вилки 244 вновь входят в зацепление с направляющими гофрами 240, 242 и полностью закрывают шлюзовые клапаны 208, 210. Посредством выполненного таким образом геометрического замыкания зубцов 246, 248 вилки с направляющими гофрами 240, 244 шлюзовые заслонки 208, 210 надежно удерживаются в своем закрытом положении, так что шлюзовые клапаны 208, 210 не могут открываться снаружи. Также направляющие заслонки 464, 466 при удалении стерильного блока 400 из стерильного шлюза 200 полностью закрываются с помощью пружин и перемещаются в свое заблокированное положение, так что затем даже при наружном силовом воздействии на стерильные заслонки 402, 404 они не могут открываться.
Фиг. 19 показывает изображение в разрезе инструментального блока 300 стерильного шлюза 200 и блока 100 сопряжения в соединенном состоянии. При этом как от блока 100 сопряжения, так и от стерильного блока 400 и стерильного шлюза 200 удалены верхние области корпуса, так что расположение стерильного шлюза 200 внутри приемной области блока 100 сопряжения и расположение стерильного блока 400 внутри приемной области стерильного шлюза 200 хорошо видны.
Фиг. 20 показывает фрагмент инструментального бока 1300 со стерильным блоком 1400 и хирургическим инструментом 1500 согласно второму варианту осуществления изобретения. В отличие от инструментального блока 300 стерильный блок 1400 инструментального блока 1300 имеет не стерильные заслонки, а жалюзи 1410 для стерильного перекрытия ведомых элементов. Дальнейшая конструкция и функция инструментального блока 1300 совпадает с конструкцией и функцией инструментального блока 300 по фиг. 1-19.
Фиг. 21 показывает фрагмент стерильного перекрытия 1038 со стерильным шлюзом 1200, который в отличие от стерильного шлюза 200 имеет не стерильные заслонки, а жалюзи 1210 для стерильного экранирования приводных элементов блока 100 сопряжения. Жалюзи 1410 блока 1400 сопряжения, как и жалюзи 1210 стерильного шлюза 1200, открываются подходящим образом посредством механического зацепления при соединении стерильного блока 1400 со стерильным шлюзом 1200 соответственно, стерильного блока 1400 со стерильным шлюзом 200 соответственно стерильного блока 400 со стерильным шлюзом 1200. Альтернативно, могут быть предусмотрены активные приводные элементы, как, например, соответственно электромотор для открытия или закрытия соответствующих жалюзи 1410, 1210.
На фиг. 22 показан фрагмент инструментального блока 2300 со стерильным блоком 2400 согласно третьему варианту осуществления изобретения. Стерильный блок 2400 не имеет элементов для стерильного перекрытия ведомых элементов, так что этот инструментальный блок 2400 после отсоединения от стерильного шлюза 200, 1200 или после отсоединения от другого показанного на фиг. 23 стерильного шлюза 2200 немедленно удаляется из стерильной области 39.
Показанное на фиг. 23 стерильное перекрытие 2038 включает в себя стерильный шлюз 2200, который в той же манере, что и стерильный блок 200, соединен с блоком 100 сопряжения. В отличие от стерильного шлюза 200 стерильный шлюз 2200 не имеет шлюзовых заслонок, а включает в себя снабженную обозначенными пунктирными линиями местами заданного разрыва пленку, которая при соединении стерильного блока 400, 1400 2400 со стерильным шлюзом 2200 вскрывается в местах заданного разрыва, так что является просто возможным непосредственное соединение приводных элементов 110-116 блока 100 сопряжения с ведомыми элементами 408-414. Предпочтительно при использовании стерильного шлюза 2200 стерильный блок 400, 1400, 2400 отсоединяется не во время операции, а только тогда, когда операция будет закончена.
Список ссылочных позиций
10 система
12 манипулятор
14 штатив
16, 16а-16d манипулирующая рука
20 головка штатива
22, 26 приводной элемент
24 нога штатива
28, 30 руки штатива
32 стойка операционного стола
34 операционный стол
36 блок управления
37 устройство ввода-вывода
38 стерильная оболочка
39 стерильная операционная область
40а-58а, 40b-58b сегменты
40с-58с, 40d-58d сегменты
60 сегмент
62, 64, 66 участки телескопической системы
68 приводное устройство
100 блок сопряжения
102 первое передаточное средство
104 первый электрический передаточный элемент
106, 108 электрический контакт
109 оптическое передаточное средство
110 первый поступательный приводной элемент/линейная подъемная вилка
112 второй поступательный приводной элемент/линейная подъемная вилка
114 первый вращательный приводной элемент/приводная шестерня
116 второй вращательный приводной элемент/приводная шестерня
118, 120 датчик сопряжения
121 блок для записи и считывания радиочастотной идентификации (RFID)
122, 124 направляющая канавка
123, 125 передний конец направляющей канавки
126 фиксирующий носик
128 фиксирующий элемент
130 ось вращения
132 пружина
134 деблокирующая кнопка
136, 138 отверстие
140, 142, 144, 146 приводной мотор
147 первая линейная передача сопряжения
148 вторая линейная передача сопряжения
150 первая ступень передачи
152 вторая степень передачи
154, 156 датчик положения
200 стерильный шлюз
202 присоединительный край
204, 206 направляющий штифт
208, 210 шлюзовая заслонка
212 дно
214, 216 отверстие
218, 220 боковая стенка
222 передняя торцевая стенка
224 задняя торцевая стенка
226 V-образный вырез
228, 230 направляющее и деблокирующее ребро
232, 234 детекторное окно
236-242 направляющий гофр
244 направляющая вилка
246, 248 зубцы
250, 252 фиксирующий гофр
254 направляющее ребро
266 первая соединительная область
268 вторая соединительная область
300, 300а-300d инструментальный блок
400 стерильный блок
401 донная пластина
402, 404 стерильная заслонка
406 второе передаточное средство
408 первый поступательный ведомый элемент
410 второй поступательный ведомый элемент
412 первый вращательный ведомый элемент
414 второй вращательный ведомый элемент
415, 417 кулачок
416, 418 пружина
420 опора наружного инструментального хвостовика
421 оптическое место сопряжения
422, 423 электрический контакт
426, 428 детекторный элемент
430, 432 боковая стенка
434, 436 фиксирующий элемент
438, 440 исполнительный элемент
442 передняя торцевая стенка
444, 446 канавка
450 задняя торцевая сторона
452 направляющая канавка
454 исполнительное ребро
456-462 V-образный захватный элемент
464, 466 направляющая заслонка
468, 470 датчик углового положения
494 RFID-транспондер
500 инструмент
510 продольная ось инструментальных хвостовиков
512 наружный инструментальный хвостовик
514 исполнительный орган (концевой эффектор)
516, 518 захватный элемент
D4 ось откидывания
D6, D7, D8 ось вращения
P1, Р2, Р3 стрелки направления
520 первый внутренний инструментальный хвостовик
522 второй внутренний инструментальный хвостовик
524 третий внутренний инструментальный хвостовик
1300 инструментальный блок
1400 стерильный блок
1500 хирургический инструмент
1410 жалюзи
1038 стерильное перекрытие
1200 стерильный шлюз
1210 жалюзи
2300 инструментальный блок
2400 стерильный блок
2500 хирургический инструмент
2038 стерильное перекрытие
2200 стерильный шлюз
Реферат
Изобретения относятся к медицинской технике, а именно к телеманипуляторным системам, которые также называются роботоассистирующими системами, и могут быть использованы в минимально инвазивной хирургии. Устройство для роботизированной хирургии выполнено с по меньшей мере одной не стерильной манипулирующей рукой, которая имеет блок сопряжения с приводными элементами, с расположенным в стерильной области стерильным инструментальным блоком, который включает в себя хирургический инструмент и стерильный блок для сопряжения хирургического инструмента с приводными элементами блока сопряжения, со стерильным перекрытием для экранирования по меньшей мере одной части манипулирующей руки от стерильной области. Блок сопряжения включает в себя поступательный приводной элемент для создания поступательного приводного движения и вращательный приводной элемент для создания вращательного приводного движения. Стерильный блок имеет выполненный с возможностью сопряжения с поступательным приводным элементом поступательный ведомый элемент и выполненный с возможностью сопряжения с вращательным приводным элементом вращательный ведомый элемент. Стерильное перекрытие включает в себя стерильный шлюз, который выполнен с возможностью соединения с блоком сопряжения и со стерильным блоком. Соединенный с блоком сопряжения стерильный шлюз стерильно экранирует поступательный приводной элемент и вращательный приводной элемент прежде, чем стерильный блок будет соединен со стерильным шлюзом, и после того, как стерильный блок был отделен от стерильного шлюза. Система для роботизированной хирургии, в частности для телероботизированной процедуры внутри стерильной области, выполнена с по меньшей мере одним вышеуказанным устройством, с по меньшей мере одним индикаторным блоком, который по меньшей мере одно изображение операционной области выдает в реальном времени, с по меньшей мере одним устройством для ввода по меньшей мере одной вводной команды, с блоком управления, который в зависимости от вводной команды с помощью по меньшей мере одного приводного устройства позиционирует манипулирующую руку и соединенный посредством стерильного шлюза с блоком сопряжения манипулирующей руки стерильный блок. Изобретения предлагают устройство и систему для роботизированной хирургии, в которых стерильное сопряжение расположенной в нестерильной области манипулирующей руки с расположенным в стерильной области стерильным блоком является легко возможным, причем посредством сопряжения обеспечивается возможность надежной механической передачи усилия и момента и/или оптической передачи и/или электрического сигнала и/или передачи энергии между манипулирующей рукой и инструментальным блоком, который включает в себя, в частности, стерильный блок и соединенный с ним хирургический инструмент. 2 н. и 16 з.п. ф-лы, 23 ил.
Формула
Документы, цитированные в отчёте о поиске
Медицинская роботизированная система
Комментарии