Оптико-электронная система обнаружения объектов - RU2639321C1
Код документа: RU2639321C1
Чертежи
Описание
Изобретение относится к оптической электронике, пассивной оптической локации и к системам обнаружения наземного базирования. Изобретение предназначено для обнаружения в воздушном пространстве малоразмерных движущихся объектов различного типа, например беспилотных летательных аппаратов, воздушных шаров, птиц и других объектов, представляющих опасность для движения воздушных судов в районах аэропортов и интенсивного воздушного движения. Предлагаемая система может быть использована для наблюдения и контроля воздушного пространства над охраняемой территорией, например над большими городами, аэропортами и другими охраняемыми объектами. В настоящее время известно множество оптических и лазерных локационных систем, осуществляющих контроль воздушного пространства и обнаружение объектов в широком угловом поле зрения. Известно лазерное локационное устройство для наблюдения объектов по патенту РФ №2263931 [1]. Устройство содержит импульсный сканирующий лазер подсвета, сканирующий приемник излучения, блоки обработки информации. К недостаткам данного устройства и лазерных активных средств наблюдения следует отнести невозможность обеспечения эффективного контроля в широком угловом поле и кругового обзора пространства лазерными сканирующими системами. Это обусловлено принципиальной невозможностью с помощью данных сканирующих систем обеспечить параллельное обнаружение объектов в широком угловом поле зрения, так как сканирующая система осуществляет в каждый момент времени обнаружение объектов в узком угловом поле, в направлении, задаваемом сканирующим блоком, а обнаружение объектов в остальном широком угловом поле в этот момент времени не осуществляется.
Наиболее эффективным для решения задачи обнаружения объектов в широком угловом поле является использование пассивных оптических наблюдательных систем на основе матричных фотоприемных устройств (МФПУ). К таким оптическим средствам относится приемная система, реализующая способ обнаружения тепловых объектов на фоне небесной полусферы по патенту РФ №2407028 [2]. Приемная система содержит широкоугольный короткофокусный объектив, в фокусе которого размещено МФПУ, выход которого подключен к вычислительной системе - видеопроцессору. Обнаружение осуществляют на основе определения и фиксации отличий уровней яркости малоразмерного объекта и протяженного атмосферного фона. Данное устройство реализует обнаружение малоразмерных объектов в пределах поля зрения используемого широкоугольного объектива. К недостаткам устройства, реализующего способ, следует отнести невозможность осуществления кругового обзора пространства во всей верхней полусфере, а также невозможность распознавания типа обнаруженного объекта, вследствие отсутствия использования всей информации при пассивном наблюдении объекта. Известен теплопеленгатор кругового обзора по патенту РФ №2458356 [3].
Данное устройство содержит двухкоординатный оптический сканер, телескоп, матричное фотоприемное устройство (МФПУ), блоки обработки информации. К недостаткам данного устройства следует отнести невозможность параллельного одновременного кругового обзора всей области верхней полусферы, вследствие использования механического сканирования, обеспечивающего одновременное наблюдение только в узкой угловой области пространства. Поэтому данное устройство способно работать только по сигналам внешнего целеуказания от некоторого другого устройства, обеспечивающего предварительный обзор всей области контроля, например всей верхней полусферы.
В качестве прототипа выбрана наиболее близкая по технической сущности оптико-пеленгационная система кругового обзора по патенту РФ №2356063 [4]. Система содержит оптико-электронный блок электронного сканирования пространства, имеющий N оптико-электронных каналов электронного сканирования, объективы которых равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей. Поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков. Система содержит также оптико-электронный канал механического сканирования, оптическая ось объектива которого проходит перпендикулярно азимутальной плоскости через центр окружности, на которой расположены объективы оптико-электронных каналов электронного сканирования. Оптико-электронный канал механического сканирования имеет поворотное зеркало наведения, обеспечивающее сканирование оптической оси данного канала в пространстве в азимутальной и угломестной плоскостях. Оптико-электронные каналы электронного и механического сканирования содержат матричные фотоприемные устройства, работающие в инфракрасном диапазоне длин волн оптических излучений. Система содержит также блоки обработки информации, блок управления, GPS - приемник и передатчик, оптический дальномер. Система содержит монитор, на экране которого отображается изображение объекта наблюдения, по которому оператором осуществляется распознавание объекта и определение его координат. Таким образом, система осуществляет круговой обзор пространства только в одном инфракрасном диапазоне длин волн, а окончательное обнаружение объекта и определение его координат осуществляется визуально оператором по экрану видеомонитора. Это обуславливает невысокую вероятность правильного обнаружения объекта, низкое быстродействие, ограниченное количество одновременно обнаруживаемых и обрабатываемых объектов - целей вследствие ограниченных возможностей человека оператора. Низкая вероятность обнаружения и распознавания объектов обусловлена также отсутствием возможности использования излучения от наблюдаемого объекта в других диапазонах оптического спектра, например, в видимом диапазоне длин волн.
Целью данного изобретения является устранение и преодоление указанных недостатков, повышение эффективности обнаружения и вероятности распознавания обнаруженных объектов при осуществлении непрерывного кругового обзора пространства пассивными оптико-электронными средствами. Данная цель достигается путем извлечения наибольшего количества информации из излучения, поступающего от объекта в широком диапазоне длин волн в видимом и инфракрасном спектрах излучения, а также посредством регистрации и анализа флуктуаций излучения, исходящего от наблюдаемого объекта.
Достигаемым новым техническим результатом является повышение эффективности обнаружения и увеличение вероятности правильного обнаружения и распознавания объектов при осуществлении кругового обзора пространства в непрерывном режиме средствами пассивной оптической локации.
Новый технический результат достигается следующим.
1. В оптико-электронной системе обнаружения объектов, содержащей первый оптико-электронный (ОЭ) блок электронного сканирования пространства, включающий N ОЭ каналов электронного сканирования, первый ОЭ канал механического сканирования, при этом каждый из ОЭ каналов электронного и механического сканирования содержит матричное фотоприемное устройство (МФПУ) и объектив, объективы ОЭ каналов электронного сканирования равномерно расположены в первой азимутальной плоскости на окружности с радиальным расположением их оптических осей, а поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков, кроме того, система содержит блок управления, блок обработки информации, блок механического сканирования, состоящий из двух сканирующих зеркал и двух блоков позиционирования, при этом выходы ОЭ каналов электронного сканирования подключены к блоку обработки информации, управляющие входы блоков позиционирования подключены к блоку управления, оптическая ось блока механического сканирования перпендикулярна первой азимутальной плоскости и проходит через центр окружности на первой азимутальной плоскости, на которой радиально расположены объективы ОЭ каналов электронного сканирования первого ОЭ блока электронного сканирования пространства, при этом объективы ОЭ каналов электронного сканирования выполнены как объективы широкого поля зрения, объектив ОЭ канала механического сканирования выполнен как объектив узкого поля зрения, а МФПУ в ОЭ каналах электронного сканирования и в ОЭ канале механического сканирования работают в инфракрасном диапазоне длин волн, блок управления подключен к блоку обработки информации, введены второй ОЭ блок электронного сканирования пространства, включающий N ОЭ каналов электронного сканирования, второй ОЭ канал механического сканирования, два блока оперативной памяти, два блока быстрого преобразования Фурье (БПФ), два блока защиты МФПУ с блоком управления, первый и второй лазерные генераторы, две формирующие линзы, полупрозрачное зеркало, диафрагму, формирующий объектив, отражательное зеркало, при этом каждый из каналов электронного сканирования второго блока ОЭ сканирования пространства и второй ОЭ канал механического сканирования содержат МФПУ и объектив, объективы ОЭ каналов электронного сканирования второго ОЭ блока электронного сканирования пространства равномерно расположены во второй азимутальной плоскости на окружности с радиальным расположением их оптических осей аналогично расположению объективов от первого ОЭ блока электронного сканирования пространства, вторая азимутальная плоскость расположена на фиксированном расстоянии от первой азимутальной плоскости и параллельна ей, оптический выход блока механического сканирования оптически связан с оптическими входами объективов первого и второго блоков механического сканирования через отражательное зеркало и соответственно первый и второй блоки защиты МФПУ, оптические выходы первого и второго лазерных генераторов посредством соответственно первой и второй формирующих линз оптически связаны с диафрагмой, установленной в фокусе формирующего объектива, оптический выход которого через отражательное зеркало связан с оптическим выходом блока механического сканирования, выходы ОЭ каналов электронного сканирования второго ОЭ блока электронного сканирования пространства подключены к блоку обработки информации, выходы первого и второго ОЭ каналов механического сканирования подключены соответственно к входам первого и второго блоков оперативной памяти, выходы которых подключены к блоку обработки информации, выходы первого и второго блоков оперативной памяти дополнительно подключены к входам соответственно первого и второго блоков быстрого преобразования Фурье, выходы которых подключены к блоку обработки информации, управляющие входы первого и второго блоков защиты МФПУ подключены к блоку управления блоками защиты МФПУ, выход которого подключен к блоку управления, управляющие входы первого и второго лазерных генераторов подключены к блоку управления.
2. В Системе по пункту 1 в ОЭ каналах электронного сканирования второго ОЭ блока электронного сканирования пространства использованы МФПУ, работающие в видимом диапазоне длин волн.
3. В Системе по пункту 1 во втором ОЭ канале механического сканирования использовано МФПУ, работающее в видимом диапазоне длин волн.
4. В Системе по пункту 1 в ОЭ каналах электронного сканирования второго ОЭ блока электронного сканирования пространства объективы выполнены как объективы широкого поля зрения.
5. В Системе по пункту 1 во втором ОЭ блоке механического сканирования объектив выполнен как объектив узкого поля зрения.
6. В Системе по пункту 1 первый лазерный генератор работает в инфракрасном диапазоне длин волн.
7. В Системе по пункту 1 второй лазерный генератор работает в видимом диапазоне длин волн.
8. В Системе по пункту 1 в ОЭ каналах электронного сканирования первого и второго ОЭ блоков электронного сканирования пространства оптические оси объективов имеют углы наклона к соответствующим азимутальным плоскостям в диапазоне от 30 до 60 градусов.
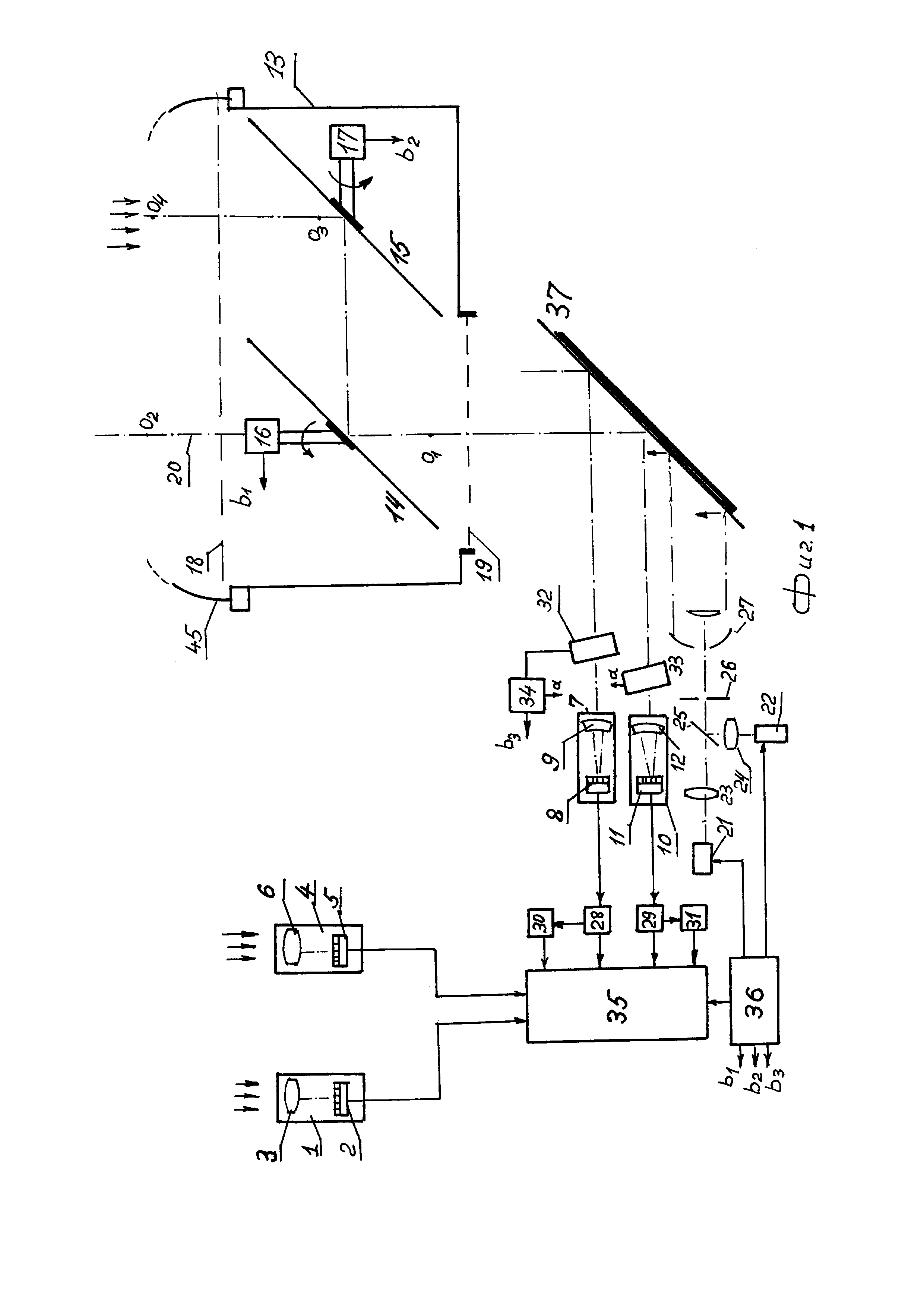
На фиг. 1 представлена блок-схема предлагаемой ОЭ системы обнаружения объектов, где цифрами обозначены следующие элементы.
1 - Оптико-электронный (ОЭ) канал электронного сканирования, входящий в первый ОЭ блок электронного сканирования пространства, включающий позиции 2 и 3.
2 - Матричное фотоприемное устройство (МФПУ) ОЭ канала электронного сканирования.
3 - Объектив.
4 - ОЭ канал электронного сканирования, входящий в состав второго ОЭ блока электронного сканирования пространства, включающий позиции 5 и 6.
5 - МФПУ ОЭ канала электронного сканирования второго ОЭ блока электронного сканирования.
6 - Объектив.
7 - Первый ОЭ канал механического сканирования, включающий позиции 8 и 9.
8 - МФПУ первого ОЭ канала механического сканирования пространства.
9 - Объектив.
10 - Второй ОЭ канал механического сканирования, включающий позиции 11 и 12.
11 - МФПУ второго ОЭ канала механического сканирования.
12 - Объектив.
13 - Блок механического сканирования, содержащий позиции 14, 15, 16, 17.
14 - Первое сканирующее зеркало.
15 - Второе сканирующее зеркало.
16 - Первый блок позиционирования зеркала 14.
17 - Второй блок позиционирования зеркала 15.
18 - Плоскость оптического входа блока механического сканирования 13.
19 - Плоскость оптического выхода блока механического сканирования 13.
20 - Оптическая ось O1-O2 блока механического сканирования 13.
21 - Первый лазерный генератор.
22 - Второй лазерный генератор.
23 - Первая формирующая линза.
24 - Вторая формирующая линза.
25 - Полупрозрачное зеркало.
26 - Диафрагма.
27 - Формирующий объектив.
28 - Первый блок оперативной памяти.
29 - Второй блок оперативной памяти.
30 - Первый блок быстрого преобразования Фурье (БПФ).
31 - Второй блок БПФ.
32 - Первый блок защиты ФПУ.
33 - Второй блок защиты ФПУ.
34 - Блок управления блоками защиты ФПУ.
35 - Блок обработки информации.
36 - Блок управления.
45 - Защитный колпак.
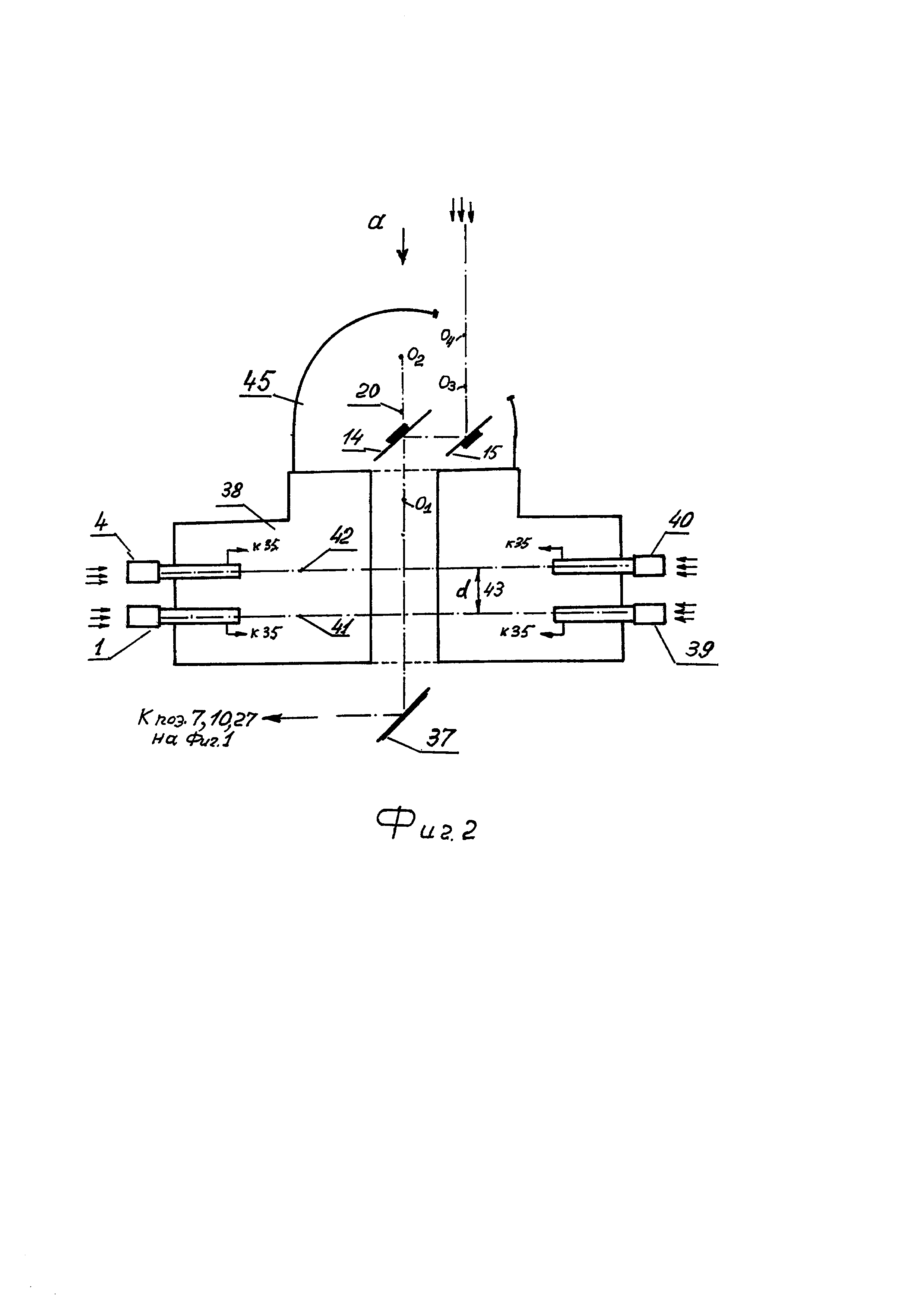
На фиг. 2 представлена схема компоновки предлагаемой ОЭ системы обнаружения объектов. Сходные позиции с фиг. 1 отмечены соответствующими прежними цифрами.
38 - Конструктивный элемент (рама) расположения первого и второго блоков ОЭ сканирования пространства.
39 - ОЭ канал электронного сканирования первого ОЭ блока электронного сканирования пространства, аналогичный поз. 1.
40 - ОЭ канал электронного сканирования второго блока электронного сканирования пространства, аналогичный поз. 4.
41 - Первая азимутальная плоскость, на которой расположены ОЭ каналы электронного сканирования первого ОЭ блока электронного сканирования пространства.
42 - Вторая азимутальная плоскость, на которой расположены ОЭ каналы электронного сканирования второго ОЭ блока электронного сканирования пространства.
43 - Фиксированное расстояние между первой и второй азимутальными плоскостями.
45 - Защитный колпак блока механического сканирования, показанный в полуоткрытом рабочем состоянии.
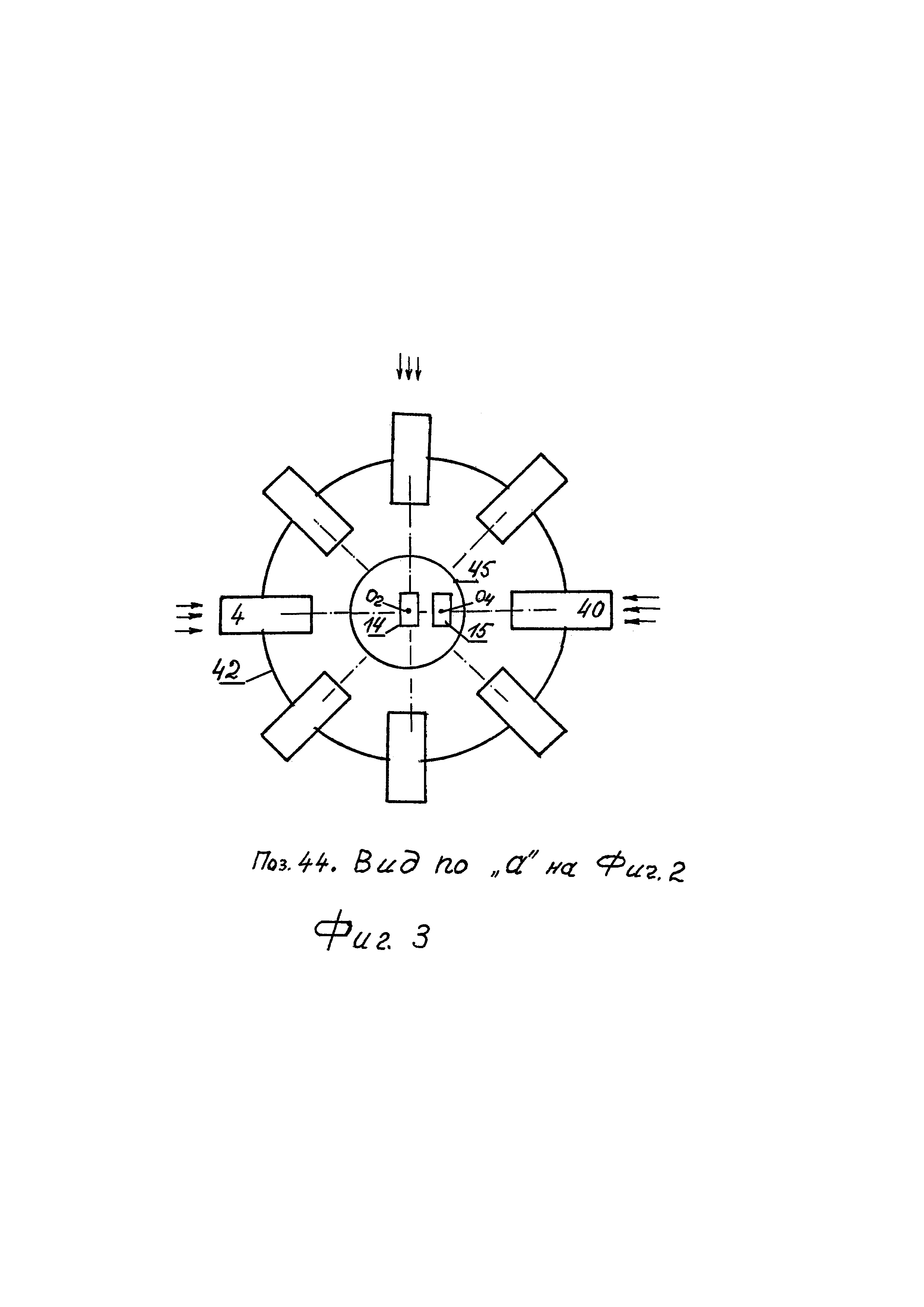
На фиг. 3 представлен полностью вновь введенный второй ОЭ блок электронного сканирования пространства в форме вида сверху по стрелке «а» на фиг. 2. Данному второму блоку присвоен номер позиции 44. Данная позиция относится ко всему изображенному на фиг. 3, кроме элементов внутри окружности 45, также видных сверху по стрелке «а». На фиг. 3 позицией 42 обозначена, как и на фиг. 2, вторая азимутальная плоскость, на которой расположены ОЭ каналы электронного сканирования второго ОЭ блока электронного сканирования пространства поз. 4 и 40. Всего данный ОЭ блок содержит в данном примере N=8 ОЭ каналов электронного сканирования, равномерно расположенных по окружности. Позицией 45 обозначен защитный колпак, показанный на фиг. 2 в полуоткрытом рабочем состоянии.
Матричное фотоприемное устройство (МФПУ) поз. 1, поз. 4, поз. 8 и 11 содержит собственно многоэлементную фотопримную матрицу, выходы которой подключены к специальному приемному блоку обработки информации, который содержит усилители сигналов с выходов фоточувствительных элементов, блок оцифровки и сопряжения с входами компьютера. В дальнейшем изложении все эти устройства объединены под названием МФПУ.
Принцип действия ОЭ системы обнаружения объектов заключается в следующем.
В предлагаемой оптико-электронной системе обнаружения объектов осуществляется непрерывный прием оптических сигналов от круговой области (зоны) верхней полусферы пространства (небесной сферы). Область наблюдения составляет 360 градусов по азимуту и порядка 40-60 градусов по углу места. ОЭ система обнаружения является системой пассивного типа и не осуществляет облучения наблюдаемой области пространства какими-либо видами оптических излучений. В данной системе осуществляется непрерывный прием оптических сигналов, исходящих от небесной сферы, а также оптических излучений от объектов, находящихся в контролируемой воздушной зоне. Таким образом, система осуществляет прием и регистрацию естественного излучения от небесной сферы и летающих в контролируемой зоне объектов. К таким объектам принадлежат различные летательные аппараты, например беспилотные летательные аппараты, а также различные виды птиц, воздушные шары и другие объекты. Задачей предлагаемой ОЭ системы является обнаружение различных малоразмерных объектов, построение их траектории движения, распознавание обнаруженных объектов по характеристикам излучений, исходящих от обнаруженного объекта и зафиксированного в процессе наблюдения и сопровождения обнаруженного объекта. Для повышения эффективности обнаружения и распознавания объектов осуществляется непрерывная регистрация излучений в двух диапазонах оптического излучения. Прием и регистрация уровней излучения осуществляется в инфракрасном и в видимом диапазонах длин волн. Предлагаемая система обнаружения объектов - далее просто Система - располагается на земной поверхности в центре или на границе контролируемой (охраняемой) зоны и осуществляет непрерывный прием и регистрацию оптических излучений параллельно от всей указанной области контроля верхней полусферы.
Прием и регистрацию оптических излучений в ИК диапазоне длин волн осуществляет первый ОЭ блок электронного сканирования, в состав которого входят ОЭ каналы электронного сканирования поз. 1 на фиг. 1 и поз. 1 и 39 на фиг. 2. Эти ОЭ каналы состоят из матричного фотоприемного устройства (МФПУ) инфракрасного диапазона поз. 2 и широкоугольного объектива ИК диапазона поз. 3. Данные ОЭ каналы электронного сканирования расположены на окружности в первой азимутальной плоскости поз. 41 на фиг. 2. Выходы МФПУ 2 этих ОЭ каналов подключены к вычислительному блоку 35. Прием и регистрацию излучений в ИК диапазоне длин волн осуществляет первый ОЭ канал механического сканирования поз. 7 на фиг. 1. Этот канал содержит МФПУ инфракрасного диапазона поз. 8 и узкопольный длиннофокусный объектив ИК диапазона поз. 9. Прием и регистрацию оптических излучений в видимом диапазоне осуществляет вновь введенный второй ОЭ блок электронного сканирования пространства, в состав которого входят ОЭ каналы электронного сканирования поз. 4 на фиг. 1 и поз. 4 и поз. 40 на фиг. 2. Эти ОЭ каналы состоят из МФПУ видимого диапазона поз. 5 и широкоугольного объектива видимого диапазона поз. 6. Данные ОЭ каналы электронного сканирования расположены на окружности во второй азимутальной плоскости поз. 42 на фиг. 2, на некотором фиксированном расстоянии d от первой азимутальной плоскости. Выходы МФПУ 5 этих ОЭ каналов подключены к вычислительному блоку 35. Таким образом, первый и второй блоки ОЭ сканирования расположены один над другим и осуществляют независимо друг от друга одновременный и непрерывный прием и регистрацию излучений от круговой зоны верхней полусферы в инфракрасном и видимом диапазонах длин волн. Прием и регистрацию излучений в видимом диапазоне длин волн осуществляет вновь введенный второй ОЭ канал механического сканирования поз. 10 на фиг. 1. Этот канал содержит МФПУ видимого диапазона длин волн поз. 11 на фиг. 1 и узкопольный объектив видимого диапазона поз. 12. Информация о параметрах излучений в видимом и ИК диапазонах от всей сканируемой круговой области верхней полусферы поступает от всех МФПУ в блок обработки информации 35, представляющий собой специализированную высокопроизводительную вычислительную машину. Первый и второй блоки электронного сканирования, каждый из которых содержит по N каналов электронного сканирования, осуществляют параллельный обзор наблюдаемой области пространства (круговой зоны), которая разделена на отдельные участки, каждый из которых наблюдается (сканируется) своим отдельным каналом электронного сканирования видимого и ИК диапазонов длин волн. Сканирование каждого такого выделенного участка небесной сферы осуществляется одним из каналов электронного сканирования (например, поз. 1), входящим в состав первого ОЭ блока электронного сканирования пространства, и одновременно соответствующим каналом электронного сканирования (поз. 4), входящим в состав второго ОЭ блока электронного сканирования пространства. Собственно сканирование данного участка небесной сферы осуществляется неподвижной матрицей соответствующего МФПУ путем регистрации излучения от каждого отдельного элемента этой матрицы (пикселя) и передачи зарегистрированного сигнала в блок обработки информации 35. Таким образом, параллельное сканирование всей наблюдаемой области пространства осуществляется без использования механических сканеров путем съема информации со всех пикселей МФПУ в обоих блоках электронного сканирования. В блоке обработки информации 35 осуществляют обработку получаемой информации параллельно и независимо для ИК диапазона и для видимого диапазона длин волн, осуществляют обнаружение объектов, находящихся в зоне наблюдения, одновременно в ИК и видимом диапазонах длин волн, что повышает вероятность обнаружения объектов за счет более высокой информативности данного двухспектрального процесса обнаружения. По специальным используемым алгоритмам осуществляют построение траектории обнаруженного объекта. Далее в точку пространства, где получен сигнал об обнаружении и нахождении объекта, осуществляют одновременно наведение объективов 9 и 12 первого и второго ОЭ каналов механического сканирования 7 и 10. Наведение осуществляют одновременно с помощью блока механического сканирования 13, на который поступают управляющие сигналы от блока управления 36, в котором эти сигналы формируются по командным сигналам от блока обработки информации 35. В блоке 35 на основании предварительного обнаружения объекта в зоне наблюдения какого-либо из секторов пространства, контролируемого одним из ОЭ каналов электронного сканирования поз. 1 или поз. 4, вырабатывается командный сигнал на направление в эту точку пространства визирной оси блока механического сканирования 13. Наведение осуществляется путем позиционирования сканирующих зеркал 14 и 15 в задаваемом блоком управления 36 положении, при котором визирная ось O3-O4 блока механического сканирования направлена в точку пространства, в которой осуществлено предварительное обнаружение объекта. При этом излучение от этой точки (области) пространства поступает на оптические входы объективов 9 и 12. Последние являются узкопольными длиннофокусными объективами каждый в своем диапазоне длин волн и осуществляют построение увеличенного изображения наблюдаемой области пространства в своем узком поле зрения. В фокусе объективов 9 и 12 находятся фоточувствительные площадки МФПУ 8 и 11, которые обеспечивают многоэлементную регистрацию изображения, сформированного в фокусах объективов 9 и 12 в видимом (МФПУ 11) и в инфракрасном (МФПУ 8) диапазонах длин волн. Зарегистрированные сигналы с выходов каждого из чувствительных элементов (пикселей) МФПУ 8 и 11 непрерывно поступает в блоки оперативной памяти 28 и 29, в которых формируются массивы информации в виде последовательных по времени изображений выделенной области пространства в видимом и ИК диапазонах длин волн. Эти последовательные по времени изображения передаются далее с выходов блоков оперативной памяти 28 и 29 в блок обработки информации 35 для дальнейшей обработки изображений, например увеличения контраста, и для распознавания. Одновременно с выходов блоков оперативной памяти 28, 29 информация об изображениях в цифровой форме поступает в блоки быстрого преобразования Фурье (БПФ) 30 и 31. В указанных блоках осуществляется формирование Фурье-преобразования зарегистрированных изображений и формируются пространственные двумерные спектры изображений в цифровой форме. Эти спектры поступают далее с выходов блоков БПФ 30 и 31 в блок обработки информации 35. Таким образом, в блок обработки информации 35 в цифровой форме непрерывно поступают изображения выделенной области пространства и соответствующие пространственные Фурье-спектры этих изображений. Указанные изображения и их спектры формируются в виде двух массивов информации, отображающих параметры изображений в двух диапазонах длин волн - в видимом диапазоне и в ИК диапазоне. На основании полученного массива информации об изображениях предварительно обнаруженного объекта в двух диапазонах длин волн, а также двух пространственных двумерных Фурье-спектрах этих изображений осуществляется окончательное обнаружение и распознавание объекта, предварительно обнаруженного ранее одним из ОЭ каналов электронного сканирования (поз. 1 и 4) в той точке пространства, в которую была направлена приемная (визирная) ось блока механического сканирования 13. Распознавание осуществляется в результате сравнения пространственных спектров, полученных для изображений в видимом и ИК диапазонах, с библиотекой эталонных спектров, хранящихся в специальных ячейках памяти блока обработки информации 35. Результаты обработки изображения объекта в двух диапазонах длин волн, а также сравнения спектров изображений с библиотекой эталонов отображаются на дисплее, входящем в состав блока обработки информации, и передаются потребителям информации, например, в центральный пульт управления движением аэропорта. Следует отметить еще один фактор повышения вероятности обнаружения и распознавания, используемый в данной предлагаемой системе. К такому фактору относится используемый при обработке анализ флуктуаций интенсивности серии сменяющихся изображений и пространственных спектров. В блоке обработки информации 35 параллельно с обработкой поступающих последовательностей изображений и спектров осуществляется анализ изменений интенсивностей изображений и спектров по времени в их отдельных элементах. В результате формируются функции флуктуаций изображений и их пространственных спектров во времени, которые содержат важную информацию о характере движения обнаруженного и сопровождаемого объекта. После обработки информации об объекте по излучению, полученному из первой точки пространства, блок механического сканирования 13 автоматически переключается на другую точку пространства, задаваемую командными сигналами от блока управления 36, по информации о предварительно обнаруженных объектах в блоке обработки информации 35. Таким образом, в предлагаемой системе осуществляется непрерывный пассивный контроль за излучением от наблюдаемой круговой области верхней полусферы (круговой обзор) или всей верхней полусферы в двух диапазонах длин волн, в результате которого осуществляется предварительное обнаружение объектов, находящихся в контролируемых секторах пространства отдельными ОЭ каналами электронного сканирования, а также построение траекторий движения объектов по результатам полученной информации. Одновременно и параллельно осуществляется анализ изображений предварительно обнаруженных объектов и их пространственных спектров с помощью МФПУ в ОЭ каналах механического сканирования и блоков БПФ 30, 31 в точках наблюдаемого пространства, в которые последовательно направляется визирная ось блока механического сканирования 13. Данные действия предлагаемой Системы осуществляются непрерывно и позволяют обеспечить непрерывный и эффективный контроль за нахождением и движением объектов в контролируемой зоне верхней полусферы или во всей верхней полусфере. Анализ большого числа характеристик принимаемого излучения позволяет выделить прежде всего следующие малоразмерные объекты: беспилотные малогабаритные летательные аппараты, различные виды птиц, воздушные шары, неуправляемые перемещающиеся в воздухе элементы наземных объектов, поднятые в воздух в результате бури, управляемые реактивные снаряды и неуправляемые артиллерийские снаряды. Указанные объекты имеют свои характерные изображения с различных ракурсов наблюдения и пространственные спектры, а также обладают различием в характере флуктуаций этих изображений и спектров. Использование одновременного формирования изображений в двух пространственных диапазонах длин волн, а также пространственных Фурье-спектрах и анализ флуктуаций позволяет существенно повысить информативность предлагаемой оптико-электронной системы, увеличить эффективность обнаружения и вероятность распознавания объектов.
Для эффективного функционирования предлагаемой оптико-электронной системы, содержащей несколько параллельно работающих оптико-электронных каналов, необходимо обеспечивать предварительную функциональную настройку ОЭ каналов, а также осуществлять периодический функциональный контроль в процессе работы системы. Такой функциональный контроль осуществляется с помощью входящих в состав системы двух лазерных генераторов, работающих в видимом поз. 21 и в инфракрасном поз. 22 диапазонах длин волн, соответствующих рабочим диапазонам МФПУ в первом и втором ОЭ блоках электронного сканирования пространства и МФПУ первого и второго каналов механического сканирования. В режиме функционального контроля данные лазерные генераторы генерируют периодическую последовательность коротких импульсов лазерного излучения с малой частотой повторения (период повторения 1 сек), которые с помощью формирующих линз 24, 25, диафрагмы 26 и формирующего объектива 27 преобразуются в единый пучок лазерного излучения на двух длинах волн, распространяющийся по направлению, параллельному направлению оптических осей объективов 9 и 12 в ОЭ каналах механического сканирования. Далее этот сформированный двухволновый лазерный пучок после отражения от зеркала 37 и от сканирующих зеркал 14 и 15 направляется в пространство по направлению, параллельному визирной оси O3-O4 и в соответствии с тем, куда направлена эта ось в режиме функционального контроля. Во время распространения сформированного лазерного пучка в воздушном пространстве возникает оптический сигнал обратного рассеивания, называемый также помехой обратного рассеивания [6]. Данный оптический сигнал обратного рассеивания в обратном ходе поступает на оптические входы объективов 9 и 12 и далее на фоточувствительные площадки МФПУ поз. 8 и 11, которые осуществляют прием и регистрацию данных излучений обратного рассеивания каждый в своем диапазоне длин волн. Зарегистрированные сигналы используются для проверки режима приема и чувствительности МФПУ 8 и 11. Одновременно осуществляется определение элемента фоточувствительных площадок в обеих МФПУ, в которых зарегистрирован максимальный уровень принимаемого оптического сигнала. Этот элемент (пиксель) соответствует центру принимаемого пучка в фокусе указанных объективов и определяет положение отметки от оптической оси каждого из принимаемых излучений единого двухволнового лазерного пучка в плоскости фоточувствительных площадок МФПУ 8 и 11. Таким образом осуществляется регистрация соответствия центральных элементов в МФПУ при регистрации единого пучка излучения на двух длинах волн, распространяющегося параллельно или вдоль визирной оси O3-O4 на входы объективов 8 и 11. Этим осуществляется установление соответствия отдельных элементов (пикселей), регистрируемых в рабочем режиме оптоэлектронной системы, при приеме изображений от одного и того же обнаруженного объекта в двух различных диапазонах длин волн, что имеет важное значение при распознавании объекта по изображениям в двух длинах волн, которые имеют, как правило, различающиеся структуры. Таким образом, с помощью двух лазерных генераторов формируется сигнал обратного рассеивания, используемый для оперативного контроля и тестирования характеристик МФПУ, что позволяет непрерывно без больших перерывов в работе обеспечивать высокую эффективность функционирования предлагаемой сложной двухдиапазонной оптико-электронной системы. Блоки защиты МФПУ 32 и 33 служат для защиты указанных фотоприемников от оптических сигналов помехи обратного рассеивания в первые моменты времени генерации и распространения лазерных импульсов от лазерных генераторов. Данные блоки защиты перекрывают оптические входы объективов 9 и 12 на короткое время перед началом генерации лазерных импульсов и в начальный момент их распространения от оптического входа блока сканирования 13 в ближнем пространстве, когда помеха обратного рассеивания наиболее сильна. Далее по командам от блока управления 36 осуществляется открывание входов объективов 9 и 12, после чего МФПУ 8 и 11 осуществляют прием и регистрацию оптического излучения помехи обратного рассеивания в своем диапазоне длин волн. Следует отметить, что работа лазерных генераторов в период функционального контроля осуществляет демаскирование системы обнаружения. В значительном количестве применений предлагаемой системы это не имеет значения. В случае, когда необходима маскировка нахождения системы, визирную ось O3-O4 блока механического сканирования 13 следует развернуть в сторону, противоположную направлению возможного нахождения сторонних наблюдательных средств, или направить вертикально в зенит, в направлении которого обнаружение излучений лазерных передатчиков сторонними летательными аппаратами наименее эффективно. Одновременно с тестированием МФПУ, входящих в состав ОЭ каналов механического сканирования, осуществляется проверка функционирования МФПУ в составе ОЭ каналов электронного сканирования, входящих в состав первого и второго ОЭ блоков электронного сканирования пространства. Для выполнения этого этапа функционального контроля визирная ось блока механического сканирования 13 направляется под некоторым углом к направлению в зенит и осуществляется генерация импульсов лазерного излучения лазерными генераторами. Далее сигнал помехи обратного рассеивания принимается в тех МФПУ, которые направлены в те сектора верхней полусферы, куда наклонена визирная ось блока механического сканирования 13. После приема и обработки сигналов соответствующими МФПУ осуществляется последовательное вращение визирной оси блока сканирования 13 вокруг зенитного направления, последовательное излучение лазерных импульсов и тестирование следующих групп МФПУ в первом и втором ОЭ блоках электронного сканирования.
Конструктивная компоновка предлагаемой системы представлена на фиг. 2 и фиг. 3. На фиг. 2 представлен вид сбоку на систему обнаружения. На фиг. 3 показан вид сверху по стрелке «а» на фиг. 2. Как было отмечено ранее, Система состоит из двух ОЭ блоков электронного сканирования пространства, каждый из которых состоит из N ОЭ каналов электронного сканирования, расположенных на параллельных друг другу плоскостях 41 и 42, называемых первой 41 и второй 42 азимутальными плоскостями, вследствие того, что эти плоскости параллельны земной поверхности. Плоскости 41 и 42 расположены на некотором фиксированном расстоянии одна от другой. Величина этого расстояния несущественна и составляет порядка одного диаметра ОЭ канала электронного сканирования 4 (20 см). Полностью на фиг. 3 показан второй ОЭ блок электронного сканирования поз. 44, находящийся сверху над аналогичным по внешнему виду первым ОЭ блоком электронного сканирования. Второй блок ОЭ сканирования 44 состоит из расположенных на несущей пластине ОЭ каналов электронного сканирования 4, 40. ОЭ каналы расположены равномерно по окружности, а оптические оси объективов этих каналов расположены радиально и сходятся геометрически в центре указанной окружности. В центре плоскости 42 на фиг. 3 условно показан защитный колпак 45 блока механического сканирования и изображение сканирующих зеркал 14 и 15. На фиг. 3 показан второй ОЭ блок электронного сканирования 44, состоящий из N=8 ОЭ каналов электронного сканирования. Такое же количество ОЭ каналов электронного сканирования имеет в этом случае и расположенный ниже первый ОЭ блок электронного сканирования. На фиг. 2 оптические оси объективов каналов электронного сканирования расположены радиально по окружностям и параллельны азимутальным плоскостям. В этом случае осуществляется круговой обзор пространства, начиная от плоскости земной поверхности, но центральная часть верхней полусферы, примыкающая к зенитной области, оказывается вне секторов наблюдения ОЭ каналов электронного сканирования. Для осуществления наблюдения за зенитной областью в соответствующем варианте выполнения системы оптические оси объективов каналов электронного сканирования наклонены к азимутальным плоскостям под некоторым углом в диапазоне от 30 до 60 градусов. При использовании широкоугольных объективов с углом поля зрения порядка 60 градусов и более и подборе соответствующего угла возвышения осей объективов и их количества в ОЭ блоках электронного сканирования возможно обеспечение одновременного наблюдения и электронного сканирования всей верхней полусферы небесного пространства.
В предлагаемой системе для обнаружения, построения их траекторий движения и распознавания объектов могут использоваться различные алгоритмы, разработанные в настоящее время для высокопроизводительных вычислительных средств (см., например, работы [7], [8]). В большинстве случаев для обнаружения малоразмерных объектов используются различные виды и модификации пороговых алгоритмов. Данные алгоритмы основаны на применении порога при разделении отметок от объекта и фона. К малоразмерным относят объекты, изображение которых помещается в одном чувствительном элементе (пикселе) МФПУ. ОЭ каналы электронного сканирования 1 и 4 осуществляют предварительное обнаружение объектов, находящихся в их секторах наблюдения пространства. Обнаружение осуществляют на основе массива информации, непрерывно поступающей с выходов МФПУ в блок обработки информации 35 в цифровой форме. В блоке обработки информации 35 осуществляют покадровую обработку двумерных массивов параллельно от всех МФПУ. Скорость обработки информации ограничивается только производительностью используемых вычислительных средств. В соответствии с пороговым алгоритмом устанавливают пороговый уровень на основе среднего значения интенсивности излучения фона, а также имеющейся информации о статистических характеристиках фона. Области изображения двумерного массива (пикселей), яркость которых выше установленного порога, считают изображением, остальные - фоном. Следует отметить, что обнаруживаемый малоразмерный объект может иметь как положительный контраст, так и отрицательный контраст относительно фона. Последнее характерно для обнаружения малоразмерных объектов в видимом диапазоне длин волн. С помощью указанных средств и алгоритмов осуществляется предварительное обнаружение с помощью ОЭ каналов электронного сканирования (поз. 1 и 4). Далее в точку пространства, где осуществлено предварительное обнаружение, направляют оптическую визирную ось блока механического сканирования 13 и направляют излучение от данной выделенной области наблюдаемого пространства в каналы механического сканирования 7 и 10 с МФПУ, снабженными объективами узкого поля зрения 9 и 12. Использование для предварительного обнаружения двух массивов информации, полученных одновременно от одной и той же области пространства в двух диапазонах длин волн - видимом и ИК диапазонах, - существенно повышает эффективность и вероятность обнаружения объектов. Вместе с тем следует отметить, что дальность действия системы обнаружения определяется чувствительностью используемых МФПУ и площадью приемной апертуры используемых приемных объективов. Поэтому, используя приемные объективы с большой площадью апертуры, например, порядка 1 м, можно реализовать систему обнаружения малоразмерных объектов весьма большой дальности действия, порядка сотен километров [5]. Однако конструктивно такие системы будут иметь недопустимо большие размеры и не могут быть использованы в целом ряде практических применений, например для контроля пространства над аэропортами. В настоящее время промышленностью освоены и выпускаются высокочувствительные фотоприемные матрицы видимого и ИК диапазонов, позволяющие при использовании стандартных объективов с приемной апертурой не более 1 дм2 обеспечить дальность действия предлагаемой системы обнаружения объектов порядка 20-30 км. По материалам данного технического предложения разработан и испытан экспериментальный образец системы обнаружения, подтвердивший увеличение эффективности обнаружения и вероятность распознавания при использовании каналов электронного и механического сканирования, работающих в двух диапазонах длин волн, а также использующих для окончательного обнаружения и распознавания объектов блоки быстрого двумерного Фурье-преобразования и анализ пространственных спектров изображений, полученных в двух оптических диапазонах длин волн.
Следует отметить еще один факт преимущества предлагаемой Системы, связанный с одновременным наблюдением и сканированием (электронным) пространства одновременно в двух диапазонах длин волн. Данное преимущество проявляется при работе Системы в сложных метеоусловиях, при которых возможен срыв обнаружения и сопровождения объекта в одном из ОЭ каналов электронного сканирования, работающем, например, в ИК диапазоне длин волн. В этом случае происходит срыв построения траектории объекта в этом диапазоне длин волн. В то же время возможно продолжение слежения за объектом и построение его траектории движения в другом (втором) используемом в Системе диапазоне длин волн, на который действие метеоусловий проявляется в меньшей степени. Таким образом, предлагаемая Система может характеризоваться более высокой надежностью и эффективностью работы в сложных метеоусловиях за счет использования одновременной работы двух ОЭ блоков электронного сканирования пространства, работающих в двух различных диапазонах длин волн.
Предлагаемая система обнаружения объектов реализована на основе современных средств оптико-электроники и лазерной техники. Основу предлагаемой Системы составляют матричные фотоприемные устройства видимого и ИК диапазонов длин волн. В настоящее время промышленностью выпускаются данные многоэлементные фотоприемные устройства для работы в видимом и ИК диапазонах, содержащие большое число фоточувствительных элементов (пикселей): порядка 106 и более элементов в приемной матрице. Отдельный класс составляют МФПУ, обладающие возможностью регистрации не только интенсивности оптического излучения, но и временной структуры поступающего на каждый пиксель оптического сигнала. Применение таких МФПУ в предлагаемой Системе позволяет определять дальность до обнаруженного объекта и обойтись без использования в Системе специального дальномерного блока. При этом подсвет обнаруженного объекта осуществляется одним из лазерных генераторов 21 или 22. Прием излучения от обнаруженного объекта осуществляется одним из МФПУ 8 или 11. От этого МФПУ и соответствующего пикселя в блок обработки информации 35 поступает информация не только о зарегистрированном уровне интенсивности, но и о моменте времени прихода на этот пиксель импульсного оптического сигнала. Таким образом, МФПУ регистрирует трехмерную структуру обнаруженного объекта и передает эту информацию в блок обработки информации 35, в котором формируется полная картина обнаружения и распознавания объектов в контролируемой зоне пространства, включая трехмерные координаты обнаруженного объекта - координата дальности, а также азимут и угол места, определяемые по направлению визирной оси блока механического сканирования 13 в соответствии с установленным позиционированием сканирующих зеркал 14 и 15 и координатам соответствующего пикселя в структуре МФПУ 8 или 11. В качестве блока обработки информации 35 использован высокопроизводительный компьютер, к которому через соответствующие интерфейсы подключены выходы всех МФПУ, входящих в состав предлагаемой Системы. В состав МФПУ входят блоки оцифровки электрических сигналов с выходов фоточувствительной матрицы, а также блок сопряжения с входом компьютера. В качестве блока управления 36 использован компьютер средней производительности, связанный с блоком обработки информации 35. Данный компьютер (блок 36) осуществляет выработку сигналов управления в цифровой форме для непрерывного управления работой всех блоков Системы: блоков позиционирования зеркал 16 и 17, лазерных генераторов 21 и 22, блока управления блоками защиты фотоприемников 34. В качестве блоков оперативной памяти 28 и 29 использованы специальные процессоры с большим объемом запоминающих регистров памяти. В качестве блоков БПФ использованы специализированные процессоры высокой производительности, обеспечивающие по специальной программе быстрого преобразования Фурье формирование в реальном масштабе времени двумерного Фурье-спектра, поступающего в покадровом режиме двумерного массива информации от соответствующего МФПУ 8 или 11. В результате в блок обработки информации непрерывно поступают изображения объектов, зарегистрированных в МФПУ, и пространственные двумерные Фурье-спектры этих предварительно обнаруженных объектов. В качестве блоков позиционирования зеркал 16 и 17 использованы, например, высокоточные шаговые электродвигатели с цифровым управлением. В качестве объективов могут быть использованы стандартно выпускаемые или специально разработанные объективы для работы в видимом или инфракрасном диапазоне длин волн соответственно в узком или широком угловом поле зрения. Формирующий объектив 27 выполнен на основе металлооптики и имеет одинаковые параметры при работе в видимом и ИК диапазонах длин волн. В качестве лазерных генераторов могут быть использованы выпускаемые промышленностью импульсные лазеры, работающие на фиксированных длинах волн в используемых видимом и ИК диапазонах. В качестве блоков защиты МФПУ 32 и 33 могут быть использованы выпускаемые промышленностью широкоапертурные быстродействующие затворы, обеспечивающие быстрое перекрывание оптического канала приема, а также быстрое открывание канала приема, что обеспечивает защиту фотоприемников от мощного импульсного лазерного излучения в первый момент генерации лазерного импульса лазерным генератором. В качестве блоков защиты может быть использована акустооптическая ячейка на основе акустооптического кристалла, в котором под воздействием управляющего электрического сигнала возбуждаются акустические волны, препятствующие вследствие дифракции прохождению оптического сигнала и перекрывающие вследствие этого оптический канал приема. В открытом состоянии в указанном кристалле отсутствуют акустические волны и данный кристалл работает как плоскопараллельная пластина. Промышленностью выпускаются оптические затворы на основе акустооптических кристаллов, работающие в видимом и отдельно в ИК диапазонах длин волн [9], [10].
Предлагаемая оптико-электронная система вследствие высокой информативности, более полного использования всей информации в принимаемом излучении в двух диапазонах длин волн, а также вследствие обеспечения непрерывного кругового обзора пространства верхней полусферы найдет применение в комплексах наблюдения и контроля охраняемых зон, охраны воздушного пространства аэропортов, мегаполисов и других областях, требующих обнаружения малоразмерных объектов, беспилотных летательных аппаратов.
Источники информации
[1] Патент РФ №2263931 от 10.11.2005. Устройство для наблюдения объектов.
[2] Патент РФ №2407028 от 20.12.2010. Способ наблюдения тепловых объектов на фоне небесной полусферы.
[3] Патент РФ №2458356 от 10.08.2012. Теплопеленгатор.
[4] Патент РФ №2356063 от 20.05.2009. Оптико-пеленгационная система кругового обзора (прототип).
[5] Манкевич С.К., Орлов Е.П. и др. Способ поиска и приема сигналов лазерной космической связи и лазерное приемное устройство для его осуществления. Патент РФ №2337379 от 27.10.2008.
[6] Орлов В.М. и др. Под ред. Зуева В.Е. Сигналы и помехи в лазерной локации. М., Радио и связь, 1985.
[7] Фисенко В.Т. и др. Автоматическое сопровождение объектов в компьютерных системах обработки изображений. Оптический журнал, том 74, вып. 11, 2007.
[8] Приходько В., Хисамов Р. Обнаружение точечных объектов на основе матричного фотопримного устройства. Оборонная техника, №1 и №2, 2007.
[9] Балакший В.И., Манкевич С.К., Парыгин В.Н. Квантовая электроника. Том 12, №4, 1985.
[10] Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. М., Радио и связь, 1985.
Реферат
Изобретение относится к оптикоэлектронике, пассивной оптической локации и наземным системам обнаружения воздушных объектов и может быть использовано для обнаружения и распознавания малоразмерных воздушных объектов различного типа: беспилотных летательных аппаратов, птиц, воздушных шаров и других объектов, представляющих опасность для воздушного движения. Достигаемый технический результат - повышение эффективности обнаружения и вероятности распознавания воздушных малоразмерных объектов при осуществлении непрерывного кругового обзора контролируемой области пространства, в том числе в сложных метеоусловиях. Указанный результат достигается за счет того, что система содержит блоки электронного и механического сканирования пространства, работающие в двух диапазонах длин волн, выполненные на основе матричных многоэлементных фотоприемных устройств видимого и инфракрасного диапазонов длин волн, а также высокопроизводительные процессоры, обеспечивающие выполнение алгоритмов обработки изображений наблюдаемых областей пространства и быстрого преобразования Фурье в реальном масштабе времени. 7 з.п. ф-лы, 3 ил.
Комментарии