Сервопривод - SU1451786A1
Код документа: SU1451786A1
Чертежи
Описание
Изобретение относится к сервоприводам , которые могут быть использованы для измерения полупроводниковых иластин диаметром до 150 мм на устройствах для испытания полупроводниковых пластин, при этом полупроводниковая пластина может иметь разную толщину.
Известен сервопривод по авт. св. № 930771.
Однако известное устройство не обеспечивает точности позиционирования . ,
Цель изобретения - повышение точности позиционирования.
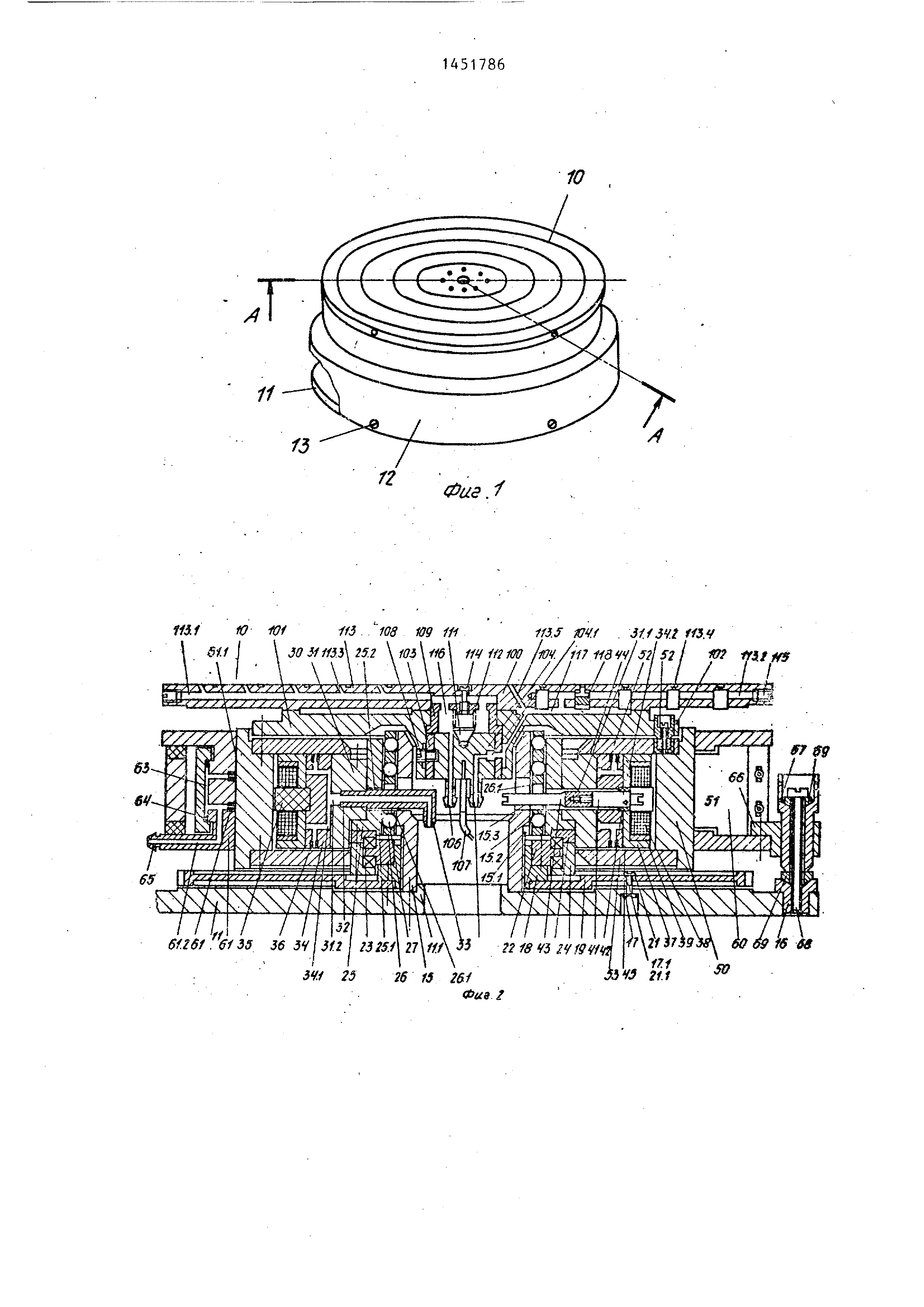
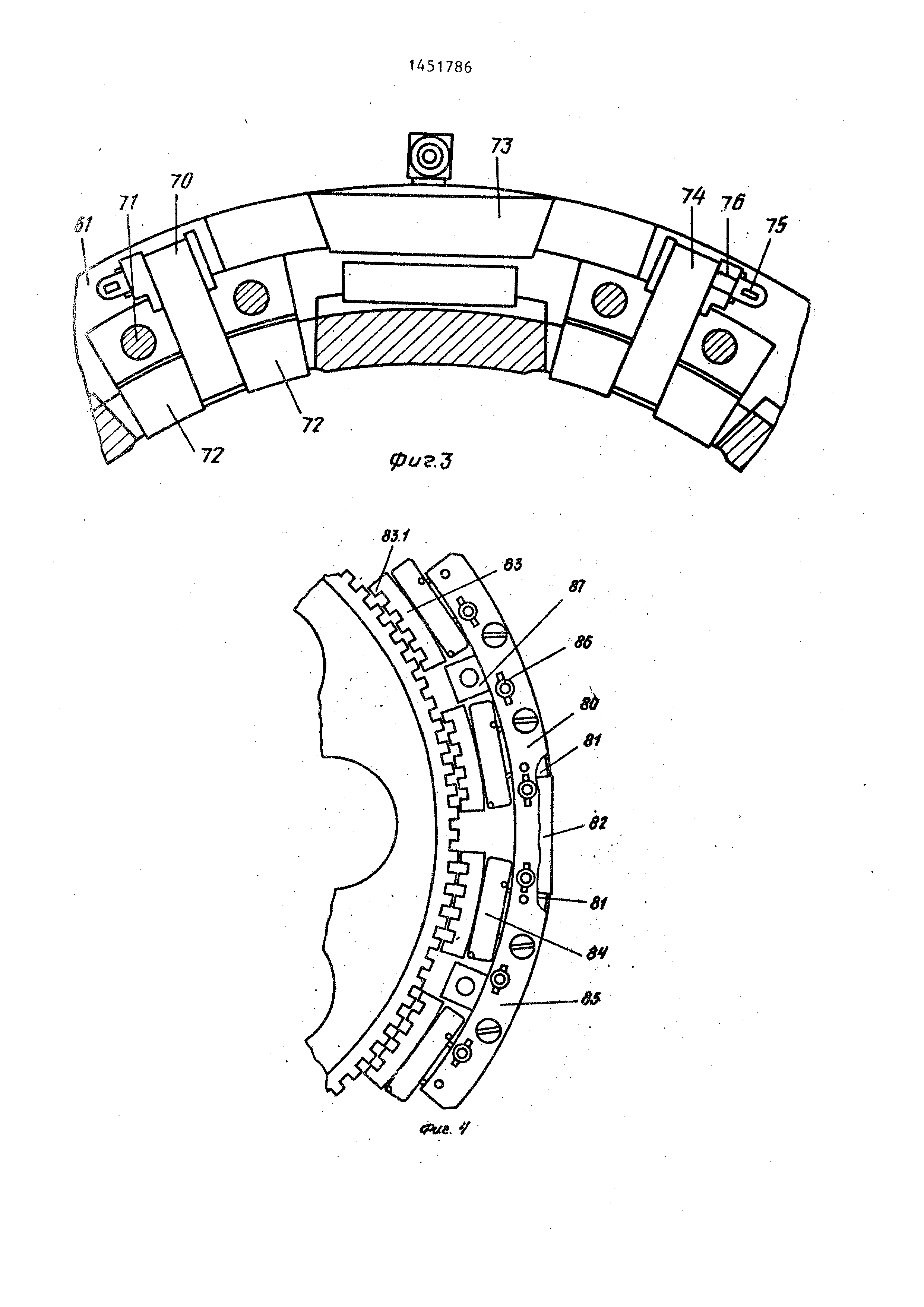
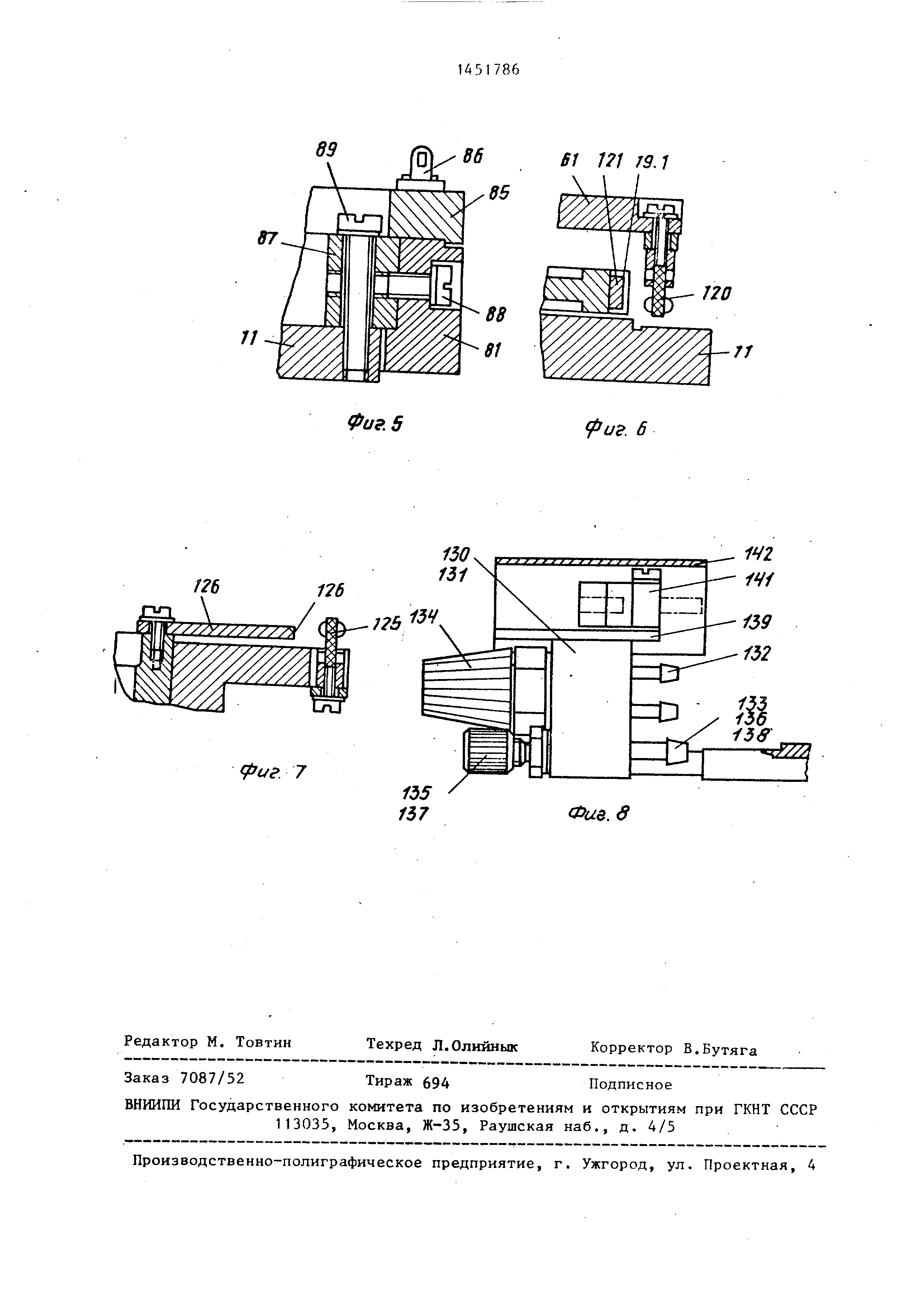
На фиг. 1 дан сервопривод, общий вид; на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - изображение двух, полюсов уложенных в кольцо подшипника; на фиг. 4 - статор привода для подрегулировки рабочей отметки; на фиг. 5 узел крепления статора для подрегулировки рабочей отметки; на фиг. 6 - первый световой барьер; на фиг, 7 - второй световой барьер; на фиг. 8 - блок присоединения. ..
Сервопривод 10 смонтирован на фундаментной плите 11. Он закрыт кожухом 12J закрепленным при помощи винтов 13 на фундаментной плите 11, Фундаментная плита t1 снабжена просверленным центральным отверстием, окаймленным центрирующим буртиком 11.1, Втулка шпинделя 15 насажена на центрирующий буртик 11.1 и прикреплена посредством винтов к фундаментной шште 11. Кроме того, фундаментная плита 11 оснащена резьбовыми втулками 16, предназначенными для закрепления конструктивных элементов, а также первым упорным винтом 17, упорный штифт которого 17.1 выходит за пределы уровня фундаментной плиты 11. Резьбовая втулка 15 снабжена в нижней части наружной резьбой 15,1, в то время как верхняя часть образовывает цилиндрическую опорную поверхность 15.2. Дополнительно к этому верхняя часть просверлена несколькими вертикально располоххенными продольными отверстиями 15.3,
К наружной резьбе 15.1 подогнана гайка 18, к которой прикреплена зубчатая шестерня 19 из магнитомягкого железа. Второй упорный винт 21 прикреплен к зубчатой .шестерне 19 с таким расчетом, чтобы его упорный штифт 21.1 оказывал в условиях дви0
5
0
5
0
5
0
5
0
5
женин вниз зубчатой шестерни 19 через гайку 18 относительно шпиндельной втулки 15 согласованное действие с упорным штифтом 17.1 с тем, чтобы предотвращать дальнейшее вращение.
Гайка 18 снабжена заплечиком, на котором смонтировано кольцо подшипника 22. Кольцо подшипника 22 имеет .верхнюю и нижнюю опорную поверхность, на каждой из которых расположено по одному шаровому кольцу 23. Верхний и нижний соединенные между собой вкладыши подшипников 24 формируют в комплекте с кольцом подшипника 22 к шаровыми кольцами 23 осевой подшипник . На верхний вкладыш подшипника 24 насажена втулка 25, внутреннее отверстие которой вьшолнено в качестве опорной поверхности -25,1.
Между опорными поверхностями 15,2 и 25.1 смонтирован сепаратор шарикоподшипника 26 с шариками 27. Втулка 25, кроме того, снабжена отверстиями 25.2 и сепаратор шарикоподшипника 26 снабжен продольными отверстиями 26,1 согласованными с продольнь1ми отвер стиями 15,3, которые проходят сквозь описываемые в дальнейшем электрические и пневматические проводки.
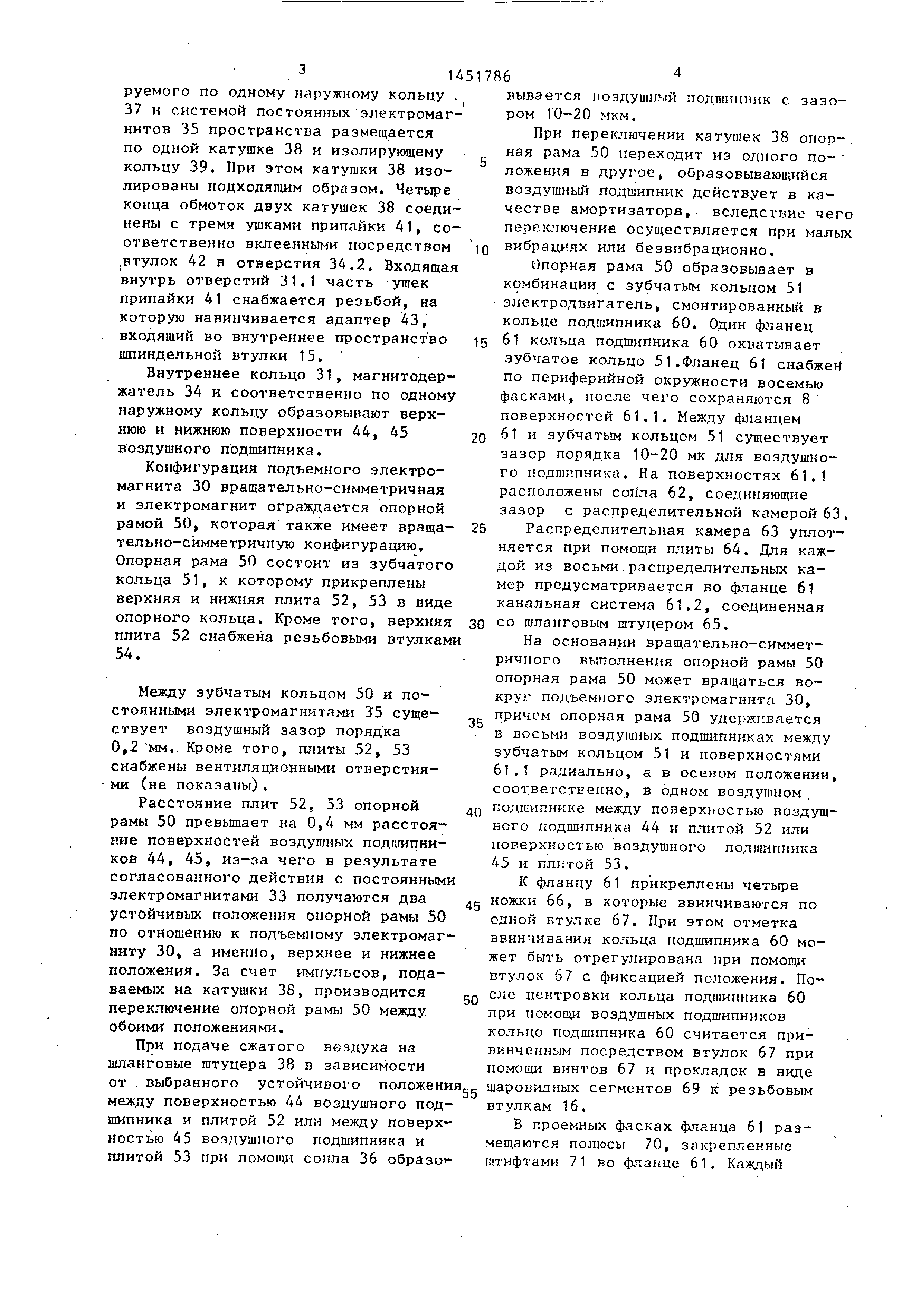
На заплечик втулки 25 насаживается подъемный электромагнит 30, При этом внутреннее кольцо 31 подъемного электромагнита 30 закрепляется посредством винтов заплечиком на втулке 25 к верхнему вкладышу подшипника 24 (винты показаны условно штрих- пунктирНой линией), Внутреннее кольцо 31 содержит на отметке отверстий 25.2 соответствующие им отверстия 31.8, а также отверстие 31,2 с внутренней резьбой.
В отверстие 31,2 ввинчивается соединительный патрубок 32, проходящий внутрь каждого из отверстий 25.2 и продольных отверстий 26,1 и 15,3 внутрь шпиндельной втулки 15, где закреплен штуцер 33 для шланга. Снаружи внутреннее кольцо 31 обводится магнитодержателем 34, оснащенным постоянным электромагнитом 35,
Магнитодержатель 34 оснащен кэ нальной системой 34.1, соединяющей отверстие 31,2 с концентрически распределенными соплами 36, причем сопла 36 оканчиваются с верхней и нижней стороны магнитодержателя 34, Маг- ниГодержатель 34 ограждается двумя наружными кольцами 37. Внутри форми ;
руемого по одному нар)ужному кольцу 37 н системой постоянных электромагнитов 35 пространства размещается по одной катушке 38 и изолирующему кольцу 39. При этом катушки 38 изолированы подходяпшм образом. Четьфе конца обмоток двух катушек 38 соединены с тремя ушками припайки 41, соответственно вклеенными посредством |Втулок 42 в отверстия 34.2. Входящая внутрь отверстий 31.1 часть ушек припайки 41 снабжается резьбой, на которую навинчивается адаптер 43, входящий во внутреннее пространство шпиндельной втулки 15.
Внутреннее кольцо 31, магнитодер- жатель 34 и соответственно по одному наружному кольцу образовывают верхнюю и нижнюю поверхности 44, 45 воздушного подшипника.
Конфигурация подъемного электромагнита 30 вращательно-симметричная и электромагнит ограждается опорной рамой 50, которая также имеет враща- тельно-симметричную конфигурацию. Опорная рама 50 состоит из зубчатого кольца 51, к которому прикреплены верхняя и нижняя плита 52, 53 в виде опорного кольца. Кроме того, верхняя плита 52 снабжена резьбовьши втулками 54.
Между зубчатым кольцом 50 и постоянными электромагнитами 35 существует воздушный зазор порядка 0,2 ММ., Кроме того, плиты 52, 53 снабжены вентиляционными отверстия- ми (не показаны).
Расстояние плит 52, 53 опорной рамы 50 превышает на 0,4 мм расстояние поверхностей воздушных подшипников 44, 45, из-за чего в результате согласованного действия с постоянными электромагнитами 33 получаются два стойчивых положения опорной рамы 50 о отношению к подъемному электромагиту 30, а именно, верхнее и нижнее оложения. За счет импульсов, подааемых на катушки 38, производится ереключение опорной рамы 50 между боими положениями.
При подаче сжатого воздуха на ланговые штуцера 38 в зависимости
К фланцу 61 прикреплены четыре ножки 66, в которые ввинчиваются по одной втулке 67. При этом отметка ввинчивания кольца подшипника 60 мо жет быть отрегулирована при помощи втулок 67 с фиксацией положения. По 50 еле центровки кольца подшипника 60 при помощи воздушных подшипников кольцо подшипника 60 считается привинченным посредством втулок 67 при помощи винтов 67 и прокладок в виде
от выбранного устойчивого положения шаровидных сегментов 69 к резьбовым между поверхностью 44 воздушного под- втулкам 16. шипника м плитой 52 или между поверхностью 45 воздушного подшипника и плитой 53 при помопд сопла 36 образо В проемных фасках фланца 61 размещаются полюсы 70, закрепленные штифтами 71 во фланце 61. Каждый
нывается воздушный подшипник с зазором 10-20 мкм.
При переключении катушек 38 опор- ная рама 50 переходит из одного положения в другое, образовываю1дийся воздушный подшипник действует в качестве амортизатора, вследствие чего переключение осуществляется при малых ю вибрациях или безвибрационно.
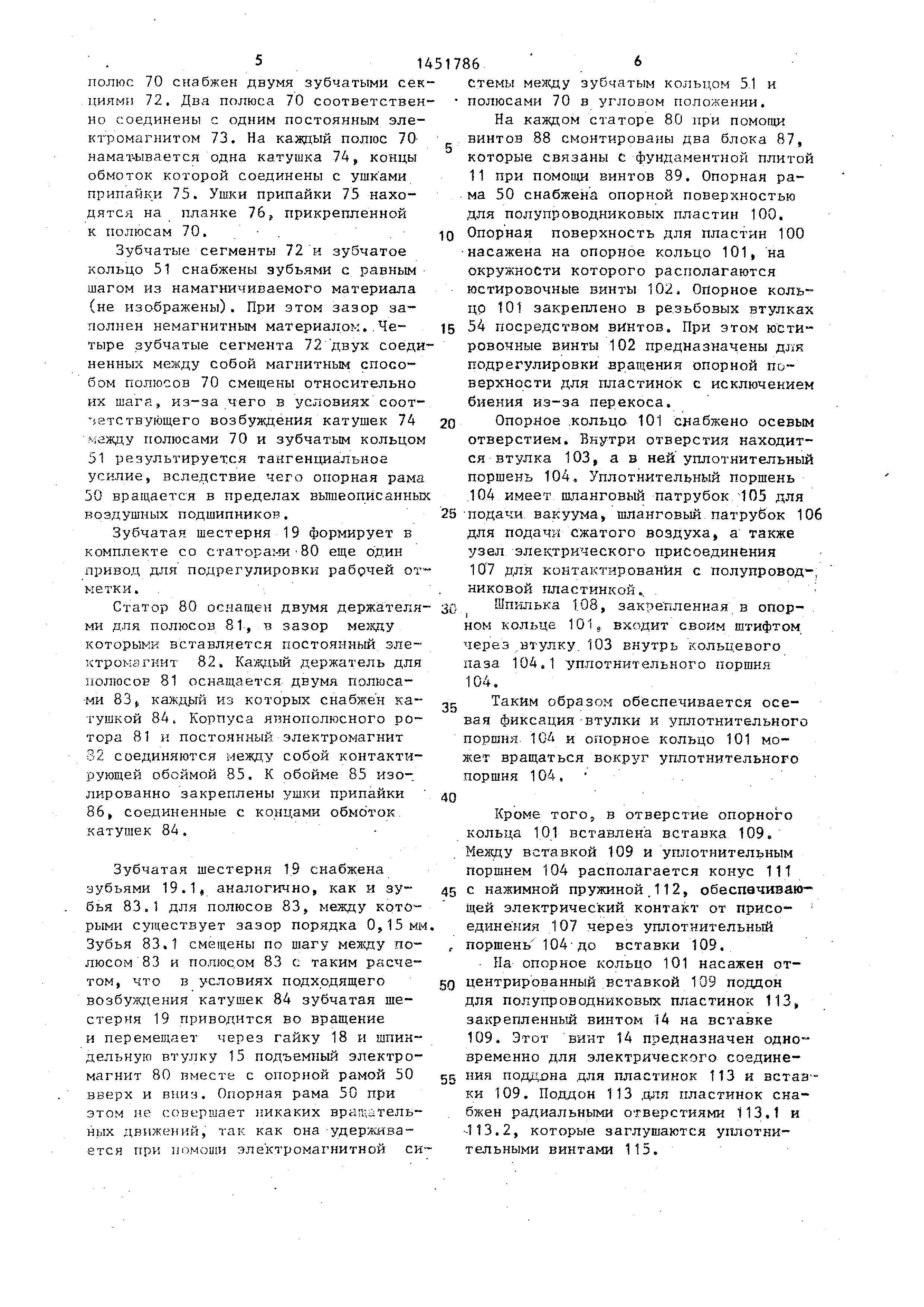
Опорная рама 50 образовывает в комбинации с зубчатым кольцом 51 электродвигатель, смонтированньп « в кольце подшипника 60. Один фланец 15 .61 кольца подшипника 60 охватывает зубчатое кольцо 51.Фланец 61 снабжей по периферийной окружности восемью фасками, после чего сохраняются 8 поверхностей 61.1. Между фланцем 20 61 и зубчатым кольцом 51 существует зазор порядка 10-20 мк для воздушного подшипника. На поверхностях 61.1 расположены сопла 62, соединяющие зазор с распределительной камерой 63 . 25 Распределительная камера 63 уплотняется при помощи плиты 64. Для каждой из восьми распределительных камер предусматривается во фланце 61 канальная система 61.2, соединенная 0 со шланговым штуцером 65.
На основании вращательно-симмет- ричного выполнения опорной рамы 50 опорная рама 50 может вращаться вокруг подъемного электромагнита 30, jg причем опорная рама 50 удерживается в восьми воздушных подшипниках между зубчатым кольцом 51 и поверхностями 61.1 радиально, а в осевом положении, соответственно, в одном возд тином Q подшипнике между поверхностью воздушного подшипника 44 и плитой 52 или поверхностью воздушного подшипника 45 и плитой 53.
К фланцу 61 прикреплены четыре ножки 66, в которые ввинчиваются по одной втулке 67. При этом отметка ввинчивания кольца подшипника 60 может быть отрегулирована при помощи втулок 67 с фиксацией положения. По- 0 еле центровки кольца подшипника 60 при помощи воздушных подшипников кольцо подшипника 60 считается привинченным посредством втулок 67 при помощи винтов 67 и прокладок в виде
5
шаровидных сегментов 69 к резьбовым втулкам 16.
шаровидных сегментов 69 к резьбовым втулкам 16.
В проемных фасках фланца 61 размещаются полюсы 70, закрепленные штифтами 71 во фланце 61. Каждый
51451786 6
полюс 70 снабжен двумя зубчатыми сек- стемы между зубчатым кольцом 5.1 и циямп 72. Два полюса 70 соответствен- полюсами 70 в угловом положении.
Реферат
Изобретение относится к области электроники и может быть использовано для испытания полупроводниковых . пластин. Сервопривод имеет планшайбу, установленную на шпиндельной втулке, имеющей цилиндрическую опорную по верхность и наружную резьбу, к которой подогнана гайка, скрепленная с зубчатой шестерней. На заплечике гайки смонтировано подшипниковое кольцо с цилиндрическим корпусом и размещенным внутри него подъемным электромагнитом . Опорная рама вместе с зубчатым колесом образует электродвигатель , смонтированньй в кольце подшипника, на фланце которого по периферийной окружности имеются восемь фасок, в которые вставлены полюсы с двумя зубчатыми секциями; Подъемный электромагнит и постоянный электромагнит ограждены опорной рамой , имеющей верхнюю и нижнюю плиты соответственно. Имеющийся воздушный зазор при вращении опорной рамы за счет переключения катушек электромагнита образует воздушный подшипник , действующий в качестве амортизатора , вследствие чего переключение осуществляется при малых вибрациях или безвибрационно. Зубчатая шестерня формирует в комплекте со статором еще один привод для подрегулировки рабочей отметки. Она имеет зубья , аналогичные зубьям, размещенным на полюсах статора, которые смещены между собой по шагу с таким расчетом, что в условиях подходящего возбуждения катушек статора зубчатой шестерни приводится во вращение и перемещает через гайку и шпиндельную втулку подъемный электромагнит статора вместе с опорной плитой вверх и вниз. При этом опорная плита не совершает никаких вращательных движений , так как она удерживается при помощи электромагнитной системы между зубчатым колесом и двумя полюсами фланца. Сервопривод имеет повышенную точность позицирования. 10 з.п.ф-лы, 8 ил. о tm СП 00
Формула
Комментарии