Способ (варианты) и система для регулирования работы двигателя в зависимости от метеоданных - RU2674545C2
Код документа: RU2674545C2
Чертежи





Описание
Уровень техники и раскрытие изобретения
Системами двигателей обычно управляют с обратной связью по показаниям различных датчиков двигателя, выполненных для измерения текущих параметров работы двигателя. То есть такие параметры работы двигателя, как момент зажигания, момент впрыска топлива, положение дросселя, рециркуляция отработавших газов РОГ (EGR) и т.п., может регулировать контроллер двигателя в зависимости от показаний датчиков. Контроллер двигателя может использовать информацию от указанных датчиков, а также различные алгоритмы и табулированные зависимости, для поддержания эксплуатационных показателей транспортного средства на максимальном уровне в меняющихся условиях. Например, контроллер двигателя может менять параметры зажигания с учетом изменений влажности.
Современные системы транспортных средств могут быть оборудованы облачными системами связи для предоставления информации о местоположении транспортного средства, прокладки маршрута и предоставления метеосводок. Ряд решений, направленных на снижение зависимости от датчиков транспортного средства, могут предусматривать использование метеоданных, полученных по системе беспроводной связи транспортных средств, для оценки параметров окружающей среды и регулирования работы транспортного средства. Один пример такой системы управления двигателем раскрыт Ампунаном (Ampunan) с соавторами в US 2006/0064232. Контроллер двигателя может регулировать тот или иной параметр работы двигателя в зависимости от результата измерения того или иного параметра окружающей среды по полученным метеоданным, а не по показанию датчика транспортного средства, выполненного для измерения этого параметра окружающей среды. Это позволяет сократить число датчиков в системе транспортного средства и тем самым ее себестоимость.
Однако авторы настоящего изобретения выявили потенциальные недостатки таких систем. В качестве одного примера, метеоданные могут быть менее достоверными, чем показания датчиков транспортного средства. Метеоданные могут быть получены от разных метеостанций, оборудованных приборами для измерения атмосферных параметров. Однако по мере увеличения расстояния между транспортным средством и ближайшей метеостанцией может расти разница между метеоусловиями в зонах текущего местоположения транспортного средства и ближайшей метеостанцией с соответствующим снижением достоверности метеоданных. Кроме того, движение транспортного средства может происходить в таком рельефе, как горы, туннели и т.п., где происходят перерывы и/или потеря беспроводной связи. В периоды без уточнения метеоинформации возможно снижение достоверности результатов оценки параметров работы двигателя и, как следствие, ухудшение эксплуатационных показателей двигателя. В других примерах транспортное средство может оказаться в таком микроклимате, например, в крытой зоне, в луже, на автомойке и т.п., в котором параметры окружающей среды в конкретном месте расположения транспортного средства могут быть отличны от средних значений параметров окружающей среды для региона, в котором транспортное средство расположено согласно результату определения его координат. В таких примерах возможно снижение достоверности полученных метеоданных.
В одном примере вышеуказанные недостатки может преодолеть способ, содержащий шаги, на которых: получают первый результат измерения метеопараметра от одного или нескольких датчиков двигателя и второй результат измерения этого метеопараметра из метеоданных, определяют первую достоверность первого результата измерения и вторую достоверность второго результата измерения, формируют результат оценки метеопараметра в зависимости от достоверностей первого и второго результатов измерения, и изменяют по меньшей мере один параметр работы двигателя в зависимости от сформированного результата оценки.
В еще одном аспекте способ может содержать шаги, на которых: в первом режиме, в котором беспроводная связь с метеослужбой не установлена, изменяют по меньшей мере один параметр работы двигателя в зависимости от показаний одного или нескольких датчиков транспортного средства, во втором режиме, в котором беспроводная связь с метеослужбой установлена, и достоверность показаний указанных одного или нескольких датчиков транспортного средства ниже пороговой, изменяют указанный по меньшей мере один параметр работы двигателя в зависимости от полученных по беспроводной связи метеоданных, и в третьем режиме, в котором беспроводная связь с метеослужбой установлена, и достоверность показаний указанных одного или нескольких датчиков транспортного средства не ниже пороговой, изменяют указанный по меньшей мере один параметр работы двигателя в зависимости от полученных по беспроводной связи метеоданных и показаний указанных одного или нескольких датчиков транспортного средства.
В еще одном аспекте система транспортного средства может содержать: систему двигателя, содержащую один или несколько датчиков, при этом указанные один или несколько датчиков выдают первый набор результатов измерений для множества метеопараметров, модуль беспроводной связи, выполненный с возможностью приема метеоданных от сети удаленных серверов, при этом метеоданные содержат второй набор результатов измерений указанного множества метеопараметров, и контроллер, сообщающийся с указанным модулем беспроводной связи, при этом контроллер содержит машиночитаемые команды для: определения первого множества достоверностей для первого набора результатов измерений, полученного от указанных одного или нескольких датчиков, определения второго множества достоверностей для второго набора результатов измерений, полученного из метеоданных, и изменения по меньшей мере одного параметра работы двигателя в зависимости от первого и второго множеств достоверностей.
Таким образом, достоверность оценки текущих параметров окружающей среды можно повысить путем определения достоверностей показаний одного или нескольких датчиков двигателя, выполненных для измерения этих параметров окружающей среды, и достоверности полученных по беспроводной связи метеоданных, содержащих результаты измерений текущих параметров окружающей среды. А именно, в зависимости от достоверностей показаний датчиков двигателя и метеоданных, один или несколько параметров окружающей среды можно оценивать либо по показаниям датчиков, либо по метеоданным, либо и по тем, и по другим. Повышение достоверности оценки текущих параметров окружающей среды позволяет точнее приводить параметры работы двигателя к необходимым уровням. В результате можно повысить топливную экономичность и снизить выбросы.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Заявляемый предмет изобретения также не ограничивается вариантами осуществления, устраняющими недостатки, указанные выше или в любой другой части настоящей заявки.
Краткое описание фигур чертежей
На ФИГ. 1 представлена принципиальная схема примера системы беспроводной связи транспортных средств по одному или нескольким вариантам осуществления раскрываемого изобретения.
На ФИГ. 2 представлена принципиальная схема транспортного средства, которое может быть включено в систему беспроводной связи транспортных средств на ФИГ. 1, при этом транспортное средство содержит систему двигателя и систему решетки радиатора по одному или нескольким вариантам осуществления раскрываемого изобретения.
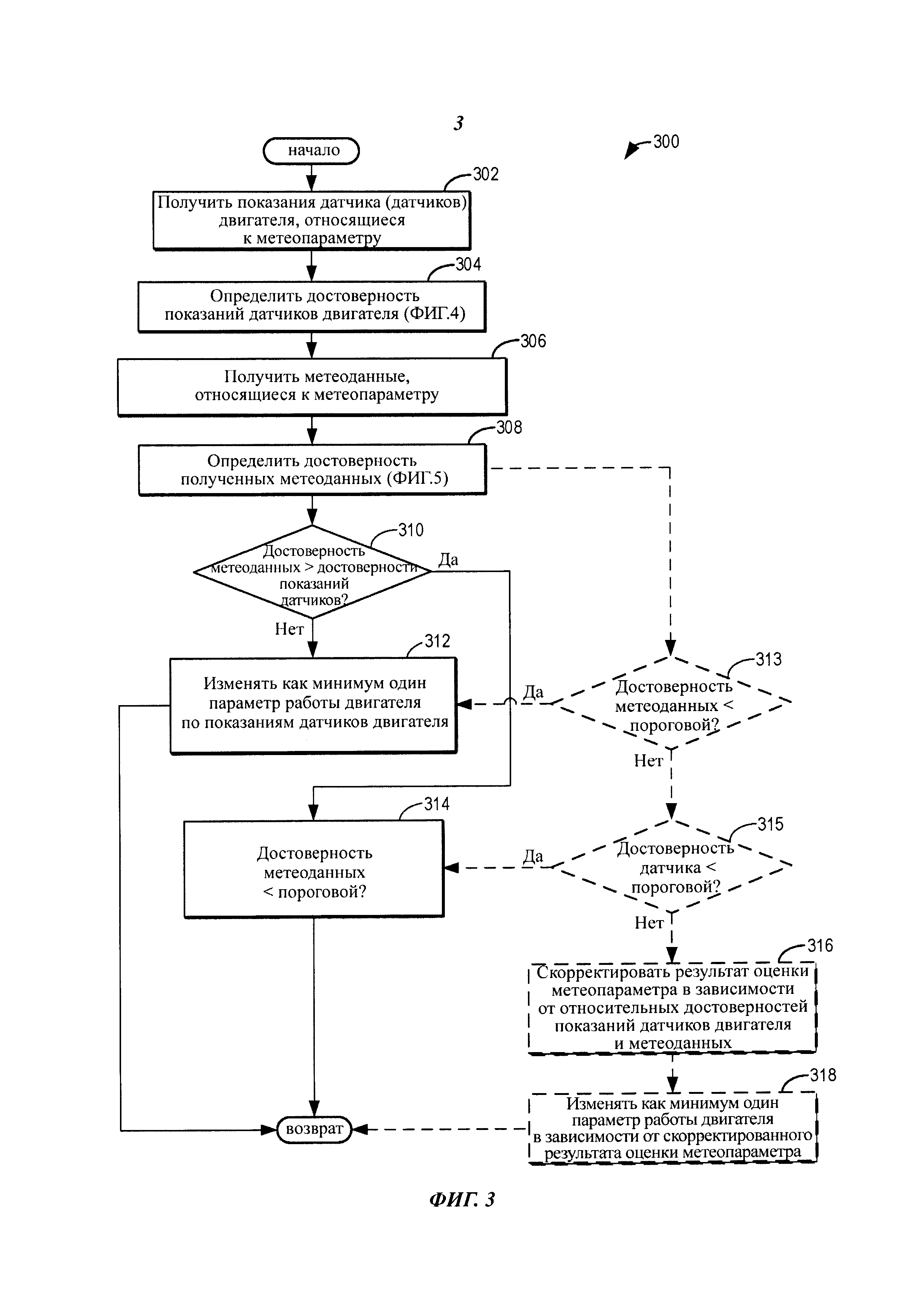
ФИГ. 3 представляет собой блок-схему способа для изменения параметров работы двигателя в зависимости от показаний датчиков транспортного средства и/или полученных метеоданных по одному или нескольким вариантам осуществления раскрываемого изобретения.
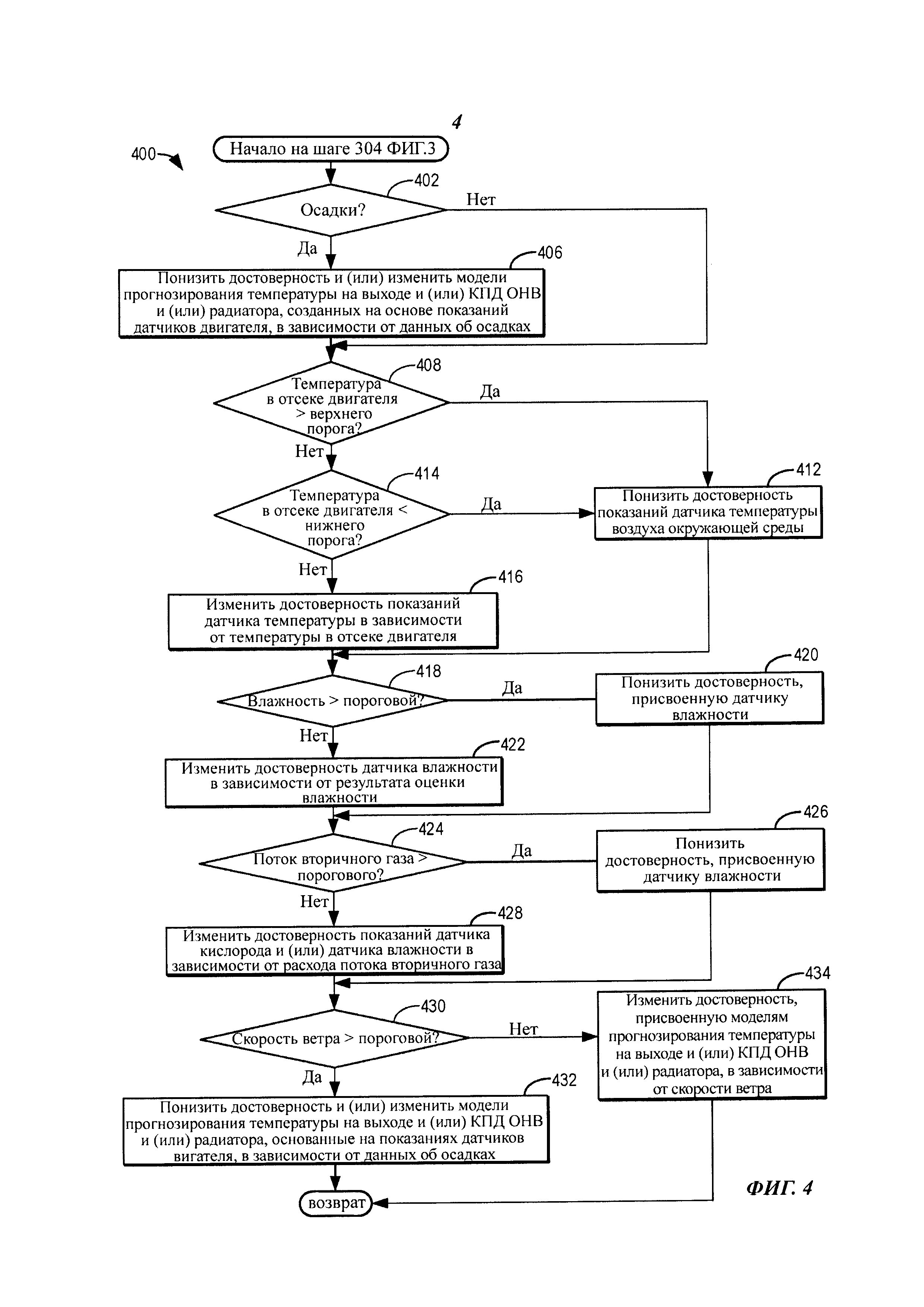
ФИГ. 4 представляет собой блок-схему способа для оценки достоверности показаний датчиков транспортного средства и основанных на них моделей условий работы двигателя по одному или нескольким вариантам осуществления раскрываемого изобретения.
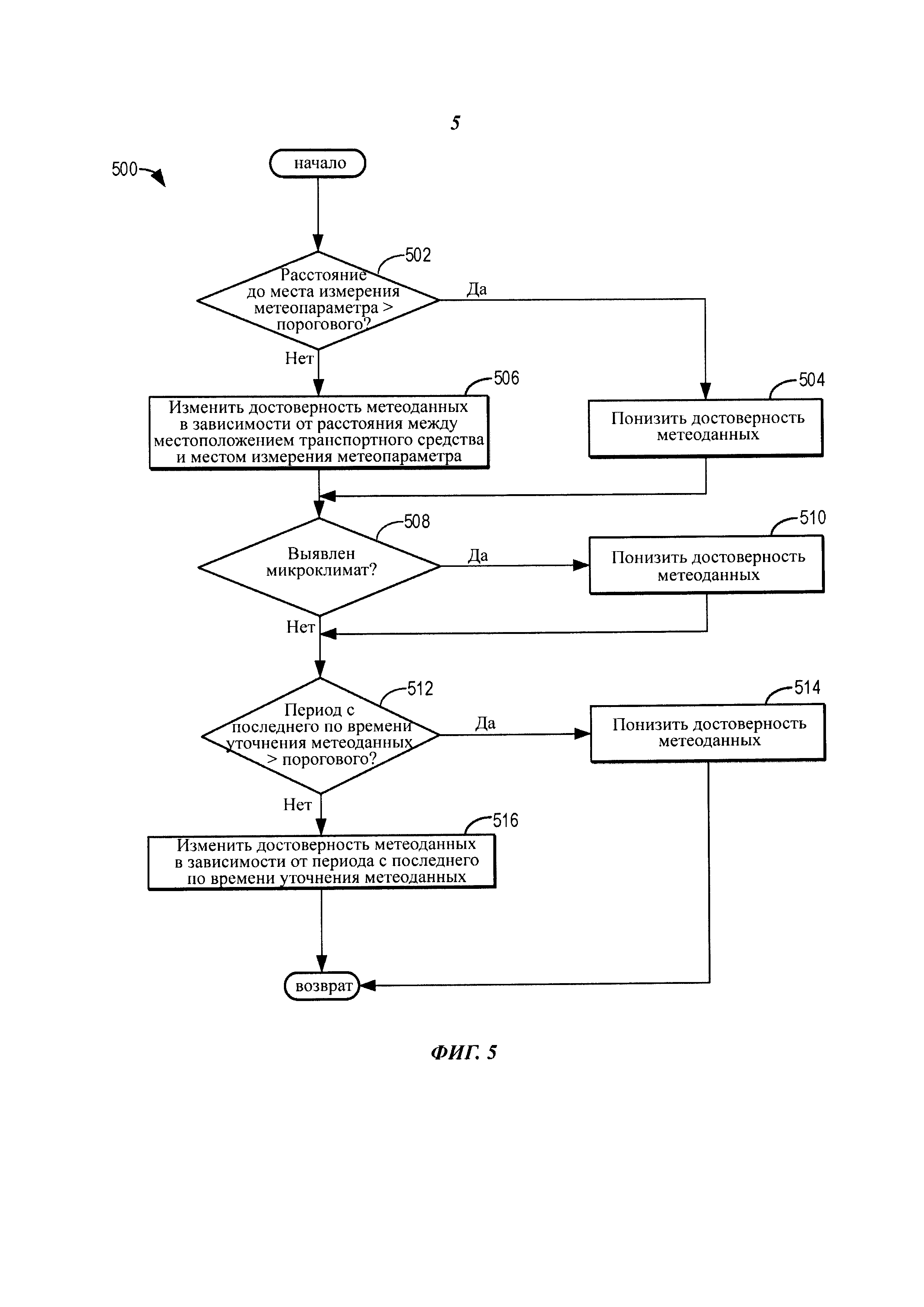
ФИГ. 5 представляет собой блок-схему способа для оценки достоверности полученных метеоданных по одному или нескольким вариантам осуществления раскрываемого изобретения.
ФИГ. 6 представляет собой блок-схему способа для изменения потока рециркуляции отработавших газов (РОГ) и момента зажигания в зависимости от показаний датчиков транспортного средства и/или полученных метеоданных по одному или нескольким вариантам осуществления раскрываемого изобретения.
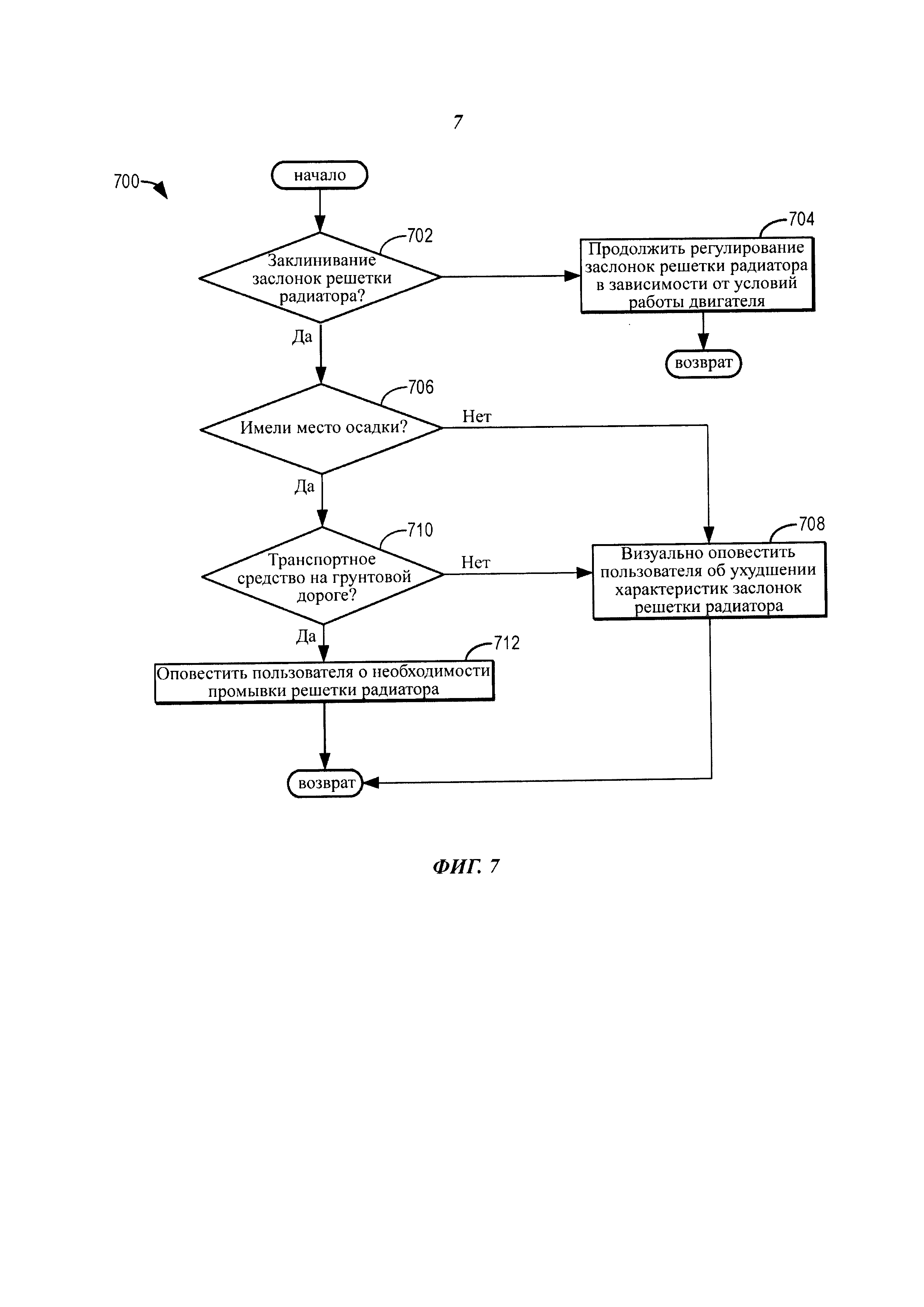
ФИГ. 7 представляет собой блок-схему способа для диагностики отказов заслонок решетки радиатора по показаниям датчиков транспортного средства и/или полученным метеоданным по одному или нескольким вариантам осуществления раскрываемого изобретения.
ФИГ. 8 представляет собой блок-схему способа для эксплуатации двухрежимного воздухоочистителя в зависимости от показаний датчиков транспортного средства и/или полученных метеоданных по одному или нескольким вариантам осуществления раскрываемого изобретения.
На ФИГ. 9 изображена диаграмма, иллюстрирующая пример изменения РОГ при изменении условий работы двигателя, определяемых по полученным метеоданным и/или показаниям датчиков транспортного средства по одному или нескольким вариантам осуществления раскрываемого изобретения.
Осуществление изобретения
Нижеследующее описание относится к системам и способам для изменения параметров работы двигателя в зависимости от метеоданных и/или показаний датчиков транспортного средства. Как раскрыто в примере системы транспортного средства на ФИГ. 2, транспортное средство, содержащее систему двигателя, может содержать различные датчики для измерения параметров окружающей среды и текущих условий работы двигателя. Транспортное средство также может содержать систему беспроводной связи с возможностью приема транспортным средством данных о дорожном движении, метеоусловиях, местоположении и т.п., как раскрыто в примере сети связи на ФИГ. 1. На ФИГ. 3 раскрыт пример способа для определения того, как использовать метеоданные и показания датчиков транспортного средства для повышения достоверности результатов оценки текущих параметров окружающей среды для улучшения эксплуатационных показателей двигателя. А именно, на ФИГ. 5 раскрыт пример способа для определения достоверности полученных метеоданных, а на ФИГ. 4 раскрыт пример способа для определения достоверности показаний датчиков транспортного средства. В зависимости от достоверностей метеоданных и показаний датчиков контроллер двигателя может скорректировать результаты оценки параметров окружающей среды.
Это позволяет повысить точность регулирования параметров работы двигателя по скорректированным результатам оценки параметров окружающей среды. Например, поток РОГ, момент впрыска и/или момент зажигания можно изменять в зависимости от результатов оценки параметров окружающей среды, как раскрыто в примере способа на ФИГ. 6. Другие примеры действий по регулированию работы двигателя по скорректированным результатам оценки параметров окружающей среды раскрыты на ФИГ. 7 и 8. А именно, на ФИГ. 7 раскрыт пример способа для диагностики отказов заслонок решетки радиатора, а на ФИГ. 8 раскрыт пример способа для эксплуатации двухрежимного воздухоочистителя. Примеры изменения потока РОГ и момента зажигания при изменении условий работы двигателя представлены на ФИГ. 9.
На ФИГ. 1 изображена принципиальная схема примера системы 10 беспроводной связи транспортных средств. Система 10 беспроводной связи транспортных средств обычно включает в себя одно или несколько оборудованных средствами телематики транспортных средств 12, одну или несколько беспроводных систем 14 (в настоящем описании также именуемых «беспроводные сети 14») и один или несколько удаленных серверов 16. Система 10 беспроводной связи транспортных средств в настоящем описании также может именоваться «система 10 облачных вычислений транспортного средства». Система 10 облачных вычислений транспортного средства обеспечивает возможность беспроводной передачи данных между транспортными средствами 12 и между транспортными средствами 12 и одним или несколькими удаленными серверами 16. В качестве одного примера, в транспортные средства 12 могут непрерывно или периодически поступать данные от серверов 16 о метеоусловиях, и/или дорожном движении, и/или о местоположении транспортного средства, и/или показателях работы транспортного средства, и/или результатах диагностики двигателя и/или транспортного средства и т.п. Транспортные средства 12 также могут непрерывно и/или периодически передавать данные на сервер 16 для обработки и/или хранения на серверах 16, например, информацию о местоположении транспортного средства, и/или условиях работы двигателя и транспортного средства и т.п. Как подробнее раскрыто ниже, работу двигателя и/или транспортного средства можно регулировать в зависимости от информации, полученной с серверов 16 по системе 10 облачных вычислений. Транспортное средство и система двигателя подробнее представлены ниже на примере ФИГ. 2.
В некоторых примерах система 10 беспроводной связи транспортных средств может дополнительно содержать различные персональные беспроводные устройства 22, и центр 24 коротких сообщений ЦКС (SMSC). Следует понимать, что сфера применения способов, раскрытых ниже на примерах ФИГ. 3-8, может включать в себя любое количество различных систем и не ограничена рабочей средой, представленной на ФИГ. 1. Таким образом, ниже представлено не более чем краткое описание одного из возможных вариантов обеспечения беспроводной связь между транспортными средствами 12 и/или между ними и удаленными серверами 16. При этом следует понимать, что для беспроводной передачи данных между транспортными средствами 12 и сетью удаленных серверов по технологии облачных вычислений могут быть задействованы и другие системы, не представленные в настоящем описании.
В иллюстрируемом варианте осуществления транспортные средства 12 изображены в виде пассажирских автомобилей, однако следует понимать, что они могут представлять собой любые другие транспортные средство, в том числе мотоциклы, грузовые автомобили, автомобили повышенной проходимости АПП (SUVs), автомобили с жилым кузовом для отдыха АЖКО (RVs), морские суда, воздушные суда и т.п. Некоторое электронное оборудование 28 транспортного средства в общих чертах показано на ФИГ. 1. Двигатель транспортного средства подробнее описан ниже на примере ФИГ. 2. В состав электронного оборудования 28 транспортного средства могу входить одно или несколько из следующих устройств: телематический блок 30, микрофон 32, одна или несколько кнопок или других управляющих вводов 34, аудиосистема 36, устройство 38 визуального отображения и навигационный модуль 40, а также несколько модулей 42 системы транспортного средства МСТС (VSMs). Некоторые из этих устройств выполнены с возможностью подключения непосредственно к телематическому блоку 30, например, микрофон 32 и кнопка (кнопки) 34, а другие подключены опосредованно через одно или несколько сетевых соединений, шину 44 связи или мультимедийную шину 46. В число примеров подходящих сетевых соединений входят: локальная сеть контроллеров ЛСК (CAN), шина передачи данных мультимедийных систем ПДМС (MOST), сеть локальной связи СЛС (LIN), локальная вычислительная сеть ЛВС (LAN) и прочие подходящие сети связи, например, сеть Ethernet или другие сети, соответствующие известным стандартам и техническим условиям Международной организации по стандартизации (ISO), Общества автомобильных инженеров (SAE) и Института инженеров по электротехнике и радиоэлектронике (IEEE) и т.п.
Телематический блок 30 обеспечивает возможность приема и/или передачи транспортными средствами 12 радиосигналов, содержащих голосовые, текстовые и/или другие данные. То есть телематический блок 30 выполнен с возможностью передачи и/или приема радиосигналов (например, электромагнитных волн) с использованием таких технологий, как Wifi, Bluetooth, радиосвязь, сотовая связь и т.п. Телематический блок 30 может именоваться «приемопередатчик 30», поскольку он выполнен с возможностью как передачи, так и приема радиосигналов. Телематический блок 30 транспортных средств 12 создает радиосигналы с возможностью их направления на одно или несколько транспортных средств 12, удаленные серверы 16, спутники 60 глобальной системы определения местоположения (GPS), спутники 62 связи, ретрансляционные вышки 70 и т.п. и их приема указанными устройствами. Таким образом, транспортные средства 12 могут быть соединены по беспроводной связи друг с другом для передачи и/или приема информации друг от друга посредством телематического блока 30. Любое из транспортных средств 12 также может быть соединено по беспроводной связи с удаленными серверами 16 для передачи и/или приема информации друг от друга.
Возможность поддержания беспроводной связи между удаленными серверами 16 и транспортными средствами 12 даже на относительно больших расстояниях между серверами 16 и транспортными средствами 12 обеспечивают ретрансляционные вышки 70. Любая из вышек 70 может содержать передающие и приемные антенны для ретрансляции радиосигналов между удаленными серверами 16 и транспортными средствами 12.
Дополнительно или взамен, система 10 связи может задействовать спутники связи для обеспечения односторонней или двусторонней связи между одним или несколькими транспортными средствами 12 и удаленными серверами 16. Эту возможность обеспечивают один или несколько спутников 62 связи и наземная передающая станция 64. Односторонняя связь может представлять собой, например, услуги спутникового радиовещания, когда передающая станция 64 принимает программные материалы (новости, музыку, метеоданные и т.п.), формирует пакеты для загрузки и направляет их на спутник 62, транслирующий эти программные материалы абонентам. Кроме того, в некоторых примерах, раскрытых ниже на ФИГ. 3-8, любое из транспортных средств 12 может по беспроводной связи передавать информацию на спутник 62 с возможностью трансляции данной информации на серверы 16.
Любое из транспортных средств 12 выполнено с возможностью связи с одним или несколькими удаленными серверами 16, другими оборудованными средствами телематики транспортными средствами 12 или каким-либо иным объектом или устройством, способным передавать и/или принимать радиосигналы. Благодаря наличию телематического блока 30 в транспортных средствах 12 могут быть реализованы такие услуги, как обмен сообщениями, навигация, телефония, метеорологическое информирование, информирование о дорожном движении, диагностика, информационно-развлекательные услуги и т.п. Передача данных может происходить по информационному соединению, например, соединению с коммутацией пакетов.
В одном варианте осуществления телематический блок 30 содержит беспроводной модем 50 для передачи данных, электронное обрабатывающее устройство 52, одно или несколько цифровых запоминающих устройств 54 и приемопередающую антенну 56. Следует понимать, что модем 50 может быть либо реализован программными средствами, либо представлять собой отдельный аппаратный компонент, расположенный внутри телематического блока 30 или за его пределами. Модем 50 может работать с использованием любого количества различных стандартов или протоколов, например, EVDO, CDMA, GPRS и EDGE. Телематический блок 30 также выполнен с возможностью передачи данных по беспроводной сети между транспортными средствами 12 и другими сетевыми устройствами. Для этого телематический блок 30 может быть выполнен для беспроводной связи в соответствии с одним или несколькими протоколами беспроводной связи, например, протоколами IEEE 802.11, WiMAX или Bluetooth. В случае применения для передачи данных с коммутацией пакетов, например, по протоколам TCP/IP, телематический блок 30 может быть выполнен со статическим IP-адресом или с возможностью настройки для автоматического получения присвоенного IP-адреса от другого устройства в сети, например, от маршрутизатора или сервера сетевых адресов.
Процессор 52 может представлять собой устройство любого типа с возможностью обработки электронных команд, в том числе микропроцессор, микроконтроллер, главный процессор, контроллер, процессор передачи данных транспортного средства и специализированную заказную интегральную схему СЗИС (ASICs). Он может представлять собой специальный процессор, предназначенный исключительно для телематического блока 30 или с возможностью совместного использования с другими системами транспортного средства. Процессор 52 выполняет хранимые в цифровой форме команды разных типов, например, программно-реализованные или аппаратно-реализованные программы, хранимые в запоминающем устройстве 54, что позволяет телематическому блоку 30 обеспечивать оказание широкого спектра услуг. Например, процессор 52 выполнен с возможностью выполнения программ или обработки данных для реализации по меньшей мере части раскрытых в настоящем описании способов.
Телематический блок 30 выполнен с возможностью обеспечения реализации широкого диапазона услуг для транспортных средств, предусматривающих беспроводную передачу данных в транспортные средства 12 и из них. В число таких услуг могут входить: информирование о результатах диагностики компонентов транспортного средства, например, компонентов двигателя, передача данных о двигателе и/или транспортном средстве, данных касательно метеоусловий окружающей среды, дистанционное управление некоторыми функциями транспортного средства посредством МСТС 42; пошаговая навигация с указанием поворотов и прочие относящиеся к навигации услуги, оказываемые во взаимодействии с навигационным модулем 40. Также следует понимать, что, в некоторых примерах, по меньшей мере некоторые из вышеуказанных модулей могут быть реализованы в форме программных команд, хранимых в телематическом блоке 30 или за его пределами, могут представлять собой аппаратные компоненты, расположенные внутри телематического блока 30 или за его пределами, и/или они могут быть выполнены за одно целое друг с другом или с другими системами, расположенными в разных частях транспортных средств 12, и/или используемыми совместно друг с другом или с указанными системами. Если указанные модули реализованы в виде МСТС 42, расположенных за пределами телематического блока 30, обмен данными и командами между ними и телематическим блоком 30 может происходить по шине 44 связи.
Навигационный модуль 40 может быть выполнен с возможностью работы с любой подходящей навигационной системой, например, GPS, «ГАЛИЛЕО» (GALILEO), «ГЛОНАСС», индийской региональной навигационной спутниковой системой IRNSS и т.п. В примерах, где навигационный модуль 40 представляет собой навигационный модуль GPS, модуль 40 принимает сигналы от группировки спутников 60 GPS. По этим сигналам модуль 40 может определять местоположение транспортного средства для оказания навигационных и других связанных с местоположением услуг водителю транспортного средства. Навигационный модуль 40 так выполнен с возможностью приема информации о дороге, например, о типе дороге, по которой едет транспортное средство (например, грунтовая, гравийная, мощеная и т.п.), ориентирах на местности, объектах инфраструктуры и т.п. Навигационный модуль 40 выполнен с возможностью создания навигационной карты. Навигационная информация может быть выведена на устройство 38 отображения (или иное устройство отображения в транспортном средстве) или представлена в устной форме, как, например, при осуществлении навигации с указанием поворотов. Оказание навигационных услуг может происходить посредством специального бортового навигационного модуля (могущего входить в состав навигационного модуля 40), либо оказание всех навигационных услуг или некоторых из них может происходить посредством телематического блока 30 с возможностью направления информации о местоположении на удаленный объект, например, удаленный сервер 16, для целей предоставления транспортному средству навигационных карт, аннотаций к картам (объекты инфраструктуры, рестораны и т.п.), вычислений маршрута, данных о метеоусловиях окружающей среды для текущего местоположения транспортного средства и т.п. Направление информации о местоположении на удаленные серверы 16 возможно и для других целей, например, для управления парком транспортных средств.
Помимо аудиосистемы 36 и навигационного модуля 40, транспортные средства 12 могут содержать и другие модули 42 системы транспортного средства (МСТС) в виде электронных аппаратных компонентов, расположенных в разных частях транспортного средства, с возможностью приема входных сигналов от одного или нескольких датчиков и их использования для выполнения диагностики, контроля, управления, информирования и/или других функций. Каждый из МСТС 42 предпочтительно соединен посредством шины 44 связи с другими МСТС и телематическим блоком 30 и выполнен с возможностью программирования для выполнения диагностических проверок систем и подсистем транспортного средства и других функций. Например, один МСТС 42 может представлять собой блок управления двигателем БУД (ЕСМ), регулирующий различные аспекты работы двигателя, например, впрыск топлива, момент зажигания, рециркуляцию отработавших газов (РОГ), положение заслонок решетки радиатора и т.п. В еще одном примере еще один МСТС 42 может представлять собой блок управления силовым агрегатом, регулирующий работу одного или нескольких компонентов силового агрегата транспортного средства, а еще один МСТС 42 может представлять собой модуль управления кузовными системами, управляющий различными электрическими компонентами, расположенными в разных частях транспортного средства, например, электроприводными дверными замками транспортного средства. По одному варианту осуществления БУД оснащен средствами бортовой диагностики БД (OBD), обрабатывающими массовые данные, поступающие в реальном масштабе времени, например, от различных датчиков, в том числе датчиков выбросов транспортного средства, и выдающими стандартизированный ряд диагностических кодов неисправности ДКН (DTCs), позволяющим техническому специалисту быстро выявлять и устранять неисправности в транспортном средстве. Специалистам в данной области техники будет ясно, что вышеуказанные МСТС являются не более чем примерами некоторых из множества модулей с возможностью применения в транспортных средствах 12.
В число электронного оборудования 28 транспортного средства также могут входить несколько интерфейсов пользователя транспортного средства, позволяющих находящимся в транспортном средстве лицам вводить и/или получить информацию, например, микрофон 32, кнопка (кнопки) 34, аудиосистема 36 и устройство 38 визуального отображения. В контексте настоящего описания термин «интерфейс пользователя транспортного средства» в широком смысле означает электронное устройство в любой подходящей форме, в том числе компоненты аппаратного и программного обеспечения, расположенные в транспортных средствах 12 и обеспечивающие пользователю транспортного средства возможность связи с тем или иным компонентом транспортных средств 12 или посредством такого компонента. В настоящем описании «пользователь транспортного средства» также может именоваться просто «пользователь» и/или «водитель транспортного средства». Кнопка (кнопки) 34 обеспечивает возможность ручного ввода пользователем данных, ответов или управляющих команд в телематический блок 30. Аудиосистема 36 передает звуковой выходной сигнал находящемуся в транспортном средстве лицу и может представлять собой специально предназначенную для этого отдельную систему или может входить в состав основной аудиосистемы транспортного средства. В одном частном случае осуществления изобретения, раскрытом на ФИГ. 1, аудиосистема 36 функционально связана как с шиной 44 транспортного средства, так и с мультимедийной шиной 46, с возможностью приема радиосигналов в AM-, ЧМ- и спутниковом диапазонах, проигрывания компакт-дисков КД (CD), цифровых универсальных дисков ЦУД (DVD) и выполнения других мультимедийных функций. Выполнение данных функций может происходить во взаимодействии с раскрытым выше информационно-развлекательным модулем или независимо от него. Устройство 38 визуального отображения предпочтительно представляет собой графический дисплей, например, сенсорный экран на приборной панели, всплывающий экран или индикатор проецирования на лобовом стекле, с возможностью выполнения множества функций ввода и вывода. Транспортное средство может содержать и другие интерфейсы пользователя, так как интерфейсы на ФИГ. 1 являются не более чем примером одного частного случая осуществления.
Удаленные серверы 16 могут быть объединены в сеть по схеме облачных вычислений. Удаленный сервер 16 может включать в себя одно или несколько вычислительных устройств, выполненных для приема, хранения, анализа и передачи цифровой информации. Например, удаленные серверы 16 могут принимать и хранить метеоинформацию, информацию о местоположении транспортного средства, данные о работе транспортного средства и т.п. В качестве одного примера, метеоданные могут быть получены от одной или нескольких метеослужб. Дополнительно или взамен, метеоданные могут быть получены непосредственно от одной или нескольких метеостанций, оснащенных устройствами для измерения атмосферных метеоусловий. В еще одном примере, информация о местоположении транспортного средства может быть получена от транспортных средств 12 и/или спутников 60 GPS. С учетом данных о местоположении транспортного средства, серверы 16 могут направлять в транспортные средства 12 метеоинформацию, соответствующую погодным условиям для текущего местоположения транспортного средства или места, ближайшего к текущему местоположению транспортного средства, для которого имеются метеоданные. Таким образом, метеоданные, хранящиеся на серверах 16, могут включать в себя информацию о местоположении, к которому относятся метеоданные. Иначе говоря, серверы 16 выполнены с возможностью приема метеоданных от нескольких метеостанций и/или метеослужб, при этом метеоданные включают в себя информацию о географическом местоположении и/или регионе, к которым эти метеоданные относятся. То есть метеоданные могут включать в себя данные о метеоусловиях, например, влажности, температуре, осадках и т.п., и информацию о географическом местоположении и/или регионе, которым соответствуют эти метеоусловия. То есть метеоданные могут отражать метеоусловия для того или иного географического местоположения и/или региона. Метеоданные для местоположения и/или региона, наиболее близких к текущему местоположению транспортного средства, могут быть переданы в каждое из транспортных средств 12.
Метеоданные или метеоинформация могут включать в себя температуру воздуха окружающей среды, относительную влажность, количество осадков, тип осадков (например, дождь, снег, град и т.п.), вероятность осадков, скорость ветра, направление ветра, точку росы, концентрацию CO2 или других парниковых газов в воздухе окружающей среды и т.п. Серверы 16 также могут направлять штормовые предупреждения в транспортные средства 12 для предупреждения водителя транспортного средства о наступающих опасностях на дороге, наводнениях, бурях и потенциально опасных условиях.
Удаленные серверы 16 могут включать в себя логическую подсистему 82 и подсистему 84 хранения данных. Удаленные серверы 16 могут необязательно включать в себя подсистему 86 отображения, подсистему 88 связи и/или другие компоненты, не показанные на ФИГ. 2. Например, удаленные серверы 16 также могут необязательно включать в себя такие пользовательские устройства ввода, как клавиатуры, мыши, игровые контроллеры, аппараты для съемки, микрофоны и/или сенсорные экраны.
Удаленные серверы 16 выполнены с возможностью хранения данных, предназначенных для использования транспортными средствами 12, в подсистеме 84 хранения данных. Например, удаленные серверы 16 выполнены с возможностью хранения метеоданных, например, о температуре, влажности, осадках, направлении ветра, скорости ветра, дожде, снеге, льде, высоте над уровнем моря, точке росы и т.п., и трансляции метеоданных в транспортные средства 12. А именно, метеоданные, транслируемые в транспортные средства 12, могут представлять собой метеоданные, собранные в месте, ближайшем к текущему местоположению транспортных средств 12. Таким образом, исходя из текущего местоположения транспортного средства, которое может быть получено от спутников 60 GPS, удаленные серверы 16 могут транслировать метеоданные, относящиеся к ближайшему к транспортным средствам 12 месту, где были получены метеоданные. Так, в транспортные средства 12 может быть направлен результат оценки текущих метеоусловий, в основе которого лежат полученные метеоданные и текущее местоположение транспортных средств 12, полученное от одного или нескольких устройств GPS, входящих в состав транспортных средств 12.
Логическая подсистема 82 может содержать одно или несколько физических устройств, выполненных с возможностью исполнения одной или нескольких команд, которые могут храниться в подсистеме 84 хранения данных. Например, логическая подсистема 82 может быть выполнена для исполнения одной или нескольких команд, являющихся частью одного или нескольких приложений, служб, программ, алгоритмов, библиотек, объектов, компонентов, структур данных или других логических структур. Такие команды могут быть направлены на выполнение того или иного задания, внедрение того или иного типа данных, изменение состояния одного или нескольких устройств или достижение необходимого результата каким-либо иным образом.
Логическая подсистема 82 может содержать один или несколько процессоров, выполненных для исполнения программных команд. Дополнительно или взамен, логическая подсистема 82 может содержать одну или несколько аппаратно- или программно-аппаратно реализованных логических машин, выполненных для исполнения аппаратно- или программно-аппаратно реализованных команд. Процессоры логической подсистемы 82 могут быть одно- или многоядерными, а реализованные на них программы могут быть выполнены с возможностью параллельной или распределенной обработки. Логическая подсистема 82 может необязательно содержать отдельные компоненты, распределенные по двум или нескольким устройствам, которые могут быть расположены удаленно и/или выполнены для скоординированной обработки. Например, логическая подсистема 82 может содержать несколько механизмов для обработки и анализа данных. Данные механизмы выполнены с возможностью беспроводной связи с одной или несколькими базами данных для обработки данных, полученных от одного или нескольких транспортных средств 12. Один или несколько аспектов логической подсистемы 82 выполнены с возможностью виртуализации и исполнения сетевыми вычислительными устройствами с удаленным доступом, скомпонованными по схеме облачных вычислений.
Подсистема 84 хранения данных может содержать одно или несколько физических устройств долговременной памяти для хранения данных и/или команд с возможностью их выполнения логической подсистемой 82 для осуществления раскрытых в настоящем описании способов и процессов. При осуществлении этих способов и процессов возможно изменение состояния подсистемы 84 хранения данных (например, для хранения разных данных).
Подсистема 84 хранения данных может содержать съемные носители и/или встроенные устройства. Подсистема 84 хранения данных может содержать оптическое запоминающее устройство (например, КД, ЦУД, дисков HD-DVD, Blu-Ray и т.п.) и/или магнитные запоминающие устройства (например, накопитель на жестких дисках, накопитель на гибких дисках, накопитель на магнитной ленте, магниторезистивное запоминающее устройство с произвольным доступом МРЗУПД (MRAM) и т.п.) и т.п. Подсистема 84 хранения данных может содержать устройства с одной или несколькими из следующих характеристик: энергозависимые, энергонезависимые, динамические, статические, с оперативным считыванием/записью, постоянные, оперативные, с последовательной выборкой, с адресацией по ячейкам, с адресацией по файлу и с адресацией по содержимому. В некоторых вариантах осуществления логическая подсистема 82 и подсистема 84 хранения данных могут быть объединены в одно или несколько общих устройств, например, специализированную заказную интегральную схему или систему на кристалле.
Следует понимать, что подсистема 84 хранения данных содержит одно или несколько физических устройств долговременной памяти. При этом в некоторых вариантах осуществления передачу частей раскрытых в настоящем описании команд можно осуществлять непостоянным образом посредством чистого сигнала (например, электромагнитного сигнала), не содержащегося на каком-либо физическом устройстве в течение по меньшей мере того или иного конечного периода. Передача данных и/или иных форм информации, относящихся к настоящему изобретению, также может происходить посредством чистого сигнала.
Серверы 16 могут содержать одну или несколько баз 85 данных в подсистеме 84 хранения данных о местоположении транспортного средства, метеоданных, данных о работе транспортного средства и двигателя, личных настроек водителя транспортного средства и т.п. Одна или несколько баз 85 данных могут образовывать базу метеоданных.
При наличии подсистема 86 отображения выполнена с возможностью визуального представления данных, содержащихся в подсистеме 84 хранения данных. Поскольку раскрытые в настоящем описании способы и процессы изменяют данные, содержащиеся в подсистеме 84 хранения данных, и тем самым изменяют состояние подсистемы 84 хранения данных, аналогичным образом может происходить изменение состояния подсистемы 86 отображения для визуального представления изменений базовых данных. Подсистема 86 отображения может содержать одно или несколько устройств отображения на основе технологии по существу любого типа. Эти устройства отображения могут быть либо размещены совместно с логической подсистемой 82 и/или подсистемой 84 хранения данных в общем кожухе, либо представлять собой периферийные устройства отображения.
При наличии подсистема 88 связи может быть выполнена для соединения с возможностью связи удаленных серверов 16 с одним или несколькими другими беспроводными устройствами, например, телематическим блоком 30 транспортных средств 12. Подсистема 88 связи может содержать устройства проводной и/или беспроводной связи, совместимые с одним или несколькими разными протоколами передачи данных. В качестве неограничивающих примеров, подсистема 88 связи может быть выполнена для связи по радиотелефонной сети, беспроводной локальной вычислительной сети, проводной локальной вычислительной сети, беспроводной глобальной вычислительной сети, проводной глобальной вычислительной сети и т.п. В некоторых вариантах осуществления подсистема 88 связи обеспечивает возможность направления удаленными серверами 16 сообщений другим устройствам и/или приема сообщений от них по той или иной сети, например, сети Интернет общего пользования.
В некоторых примерах ретрансляционные вышки 70 могут быть выполнены как часть сети беспроводной сотовой связи. В таких примерах система 10 связи может содержать персональные беспроводные устройства 22, могущие представлять собой, например, сотовые телефоны или иные персональные переносные устройства с возможностью беспроводной связи, в том числе, для иллюстрируемого варианта, с возможностью приема и передачи сообщений службы коротких сообщений СКС (SMS). Устройства 22 выполнены с возможностью связи с ретрансляционными вышками 70 для направления и приема голосовых вызовов, сообщений СКС и передачи других данных, например, неречевых данных для обеспечения доступа в Интернет, передачи метеоинформации, информации о местоположении и т.п. Телематический блок 30 каждого из транспортных средств 12 также может быть выполнен с возможностью направления и/или приема сообщений СКС и телефонных вызовов по сети сотовой связи, обеспечиваемой ретрансляционными вышками 70.
Телематический блок 30 может быть выполнен с возможностью использования сотовой связи по стандарту GSM или CDMA и может содержать стандартный набор микросхем для голосовой сотовой связи, например, для совершения звонков без использования рук.
Система связи также может содержать один или несколько центров 72 коммутации подвижной связи ЦКПС (MSCs), а также любые другие сетевые компоненты, необходимые для установления связи между системой 14 оператора беспроводной связи с удаленными серверами 16. В связи с этим, любая из ретрансляционных вышек 70 может содержать передающие и приемные антенны и базовую станцию, при этом базовые станции разных вышек сотовой связи связаны с ЦКПС 72 либо непосредственно, либо через промежуточное оборудование, например, контроллер базовой станции. В системе 14 оператора беспроводной связи может быть задействована любая подходящая технология связи, в том числе, например, аналоговые технологии, например, AMPS (перспективная служба радиотелефонной связи с подвижными объектами), или относительно новые цифровые технологии, например, CDMA (например, CDMA2000) или GSM/GPRS. Специалистам в данной области техники будет ясно, что возможны различные варианты расположения вышки сотовой связи / базовой станции / ЦКПС с возможностью их применения в системе 14 беспроводной связи. Например, базовая станция и вышка сотовой связи могут быть расположены совместно на одной и той же площадке или удаленно друг от друга, при этом возможные варианты включают, помимо прочих, следующие: любая базовая станция может обслуживать единственную вышку сотовой связи или единственная базовая станция может обслуживать несколько вышек сотовой связи, и несколько базовых станций могут быть связаны с единственным ЦКПС.
Центр 24 коротких сообщений (ЦКС) предпочтительно связан с ретрансляционными вышками 70 и задействован в передаче сообщений СКС. ЦКС 24 выполнен с возможностью работы по принципу промежуточного сохранения и передачи; а именно, когда первый пользователь направляет сообщение СКС, предназначенное для второго пользователя, происходит промежуточное сохранение сообщения СКС до тех пор, пока второй пользовать не станет доступен для его приема. В других вариантах осуществления ЦКС работает по принципу «сохранить и забыть», согласно которому он осуществляет попытку передать сообщение СКС один раз. Данные типы решений позволяют пользователям направлять и принимать сообщения СКС в любое время, даже во время сеанса голосовой связи. Разумеется, следует понимать, что указанный пример осуществления ЦКС 24 является не более чем примером подходящей конфигурации, так как ЦКС может быть выполнен и в другой известной из уровня техники конфигурации. В целом, сообщения СКС, отправляемые в транспортные средства 12 или на устройства 22 подвижной радиосвязи или из указанных транспортных средств или устройств, поступают на ретрансляционные вышки 70, которые передают их, и проходят через ЦКПС 72 и ЦКС 24 для обработки и направления на удаленные серверы 16.
На ФИГ. 2 схематически изображен пример системы 200 двигателя, могущей входить в состав транспортного средства 202, например, транспортных средств 12, раскрытых выше на примере ФИГ. 1. То есть транспортное средство 202 может быть таким же, что и транспортные средства 12, раскрытые выше на ФИГ. 1, или быть схожим с ними. В некоторых примерах система 200 двигателя может входить в состав транспортных средств 12, раскрытых выше на ФИГ. 1. Например, система 200 двигателя может входить в состав дорожного транспортного средства, помимо прочих типов транспортных средств. Несмотря на то, что примеры применения системы 200 двигателя будут раскрыты для указанного транспортного средства, следует понимать, что возможно использование и других типов двигателей и силовых установок транспортных средств, в том числе пассажирских автомобилей, грузовых автомобилей и т.п.
Системой 200 двигателя и/или другими компонентами транспортного средства 202 может управлять контроллер 212. Контроллер 212 может представлять собой МСТС 42, раскрытый выше на примере ФИГ. 1, или быть схож с ним. То есть контроллер 212 выполнен с возможностью приема данных по беспроводной связи, например, метеоданных и данных о местоположении транспортного средства, от одного или нескольких удаленных серверов (например, удаленных серверов 16, раскрытых выше на примере ФИГ. 1), и регулирования работы одного или нескольких компонентов транспортного средства 202 в зависимости от полученных метеоданных.
В раскрытом варианте осуществления двигатель 210 представляет собой двигатель с наддувом, соединенный с турбокомпрессором 213, содержащим компрессор 214 с приводом от турбины 216. Свежий воздух может поступать по заборному каналу 242 в двигатель 210 через воздухоочиститель 211 и течь в компрессор 214. А именно, свежий воздух, поступающий в транспортное средство 202, может поступать в систему 200 двигателя и течь через воздухоочиститель 211 по пути во впускной коллектор 222. Воздух, поступающий в систему 200 двигателя, может быть принудительно пропущен через воздухоочиститель 211 перед направлением во впускной коллектор 222. Воздухоочиститель 211 в настоящем описании также может именоваться «воздушный фильтр 211» и быть выполнен с возможностью удерживания твердых частиц и/или очистки воздуха, поступающего в двигатель 210.
В некоторых примерах заборный канал 242 может быть расположен в отсеке транспортного средства 202, вмещающем двигатель 210. Заборный канал 242 также выполнен с возможностью приема воздуха, поступающего в транспортное средство 202 через решетку 248 радиатора. То есть весь воздух, поступающий в транспортное средство 202 через решетку 248 радиатора, или его часть может быть направлен в двигатель 210 по заборному каналу 242. При этом в других примерах заборный канал 242 может содержать собственный источник поступления воздуха из-за пределов транспортного средства и может быть соединен по текучей среде с потоком воздуха окружающей среды за пределами транспортного средства 202 через решетки или иные проемы в транспортном средстве, отличные от решетки 248 радиатора.
В других примерах воздухоочиститель 211 может представлять собой двухрежимный воздухоочиститель с возможностью приема потока воздуха окружающей среды из двух источников по нескольким впускным каналам. То есть в воздухоочиститель 211 может поступать поток воздуха из первого источника, например, решетки 248 радиатора, по заборному каналу 242. Дополнительно, в некоторых примерах воздухоочиститель 211 может быть соединен с вспомогательным заборным каналом 243 с возможностью приема потока воздуха из второго источник, отличного от первого источника, по вспомогательному заборному каналу 243. Например, вспомогательный заборный канал 243 может представлять собой шноркель, соединяющий по текучей среде воздухоочиститель 211 с потоком воздуха окружающей среды за пределами транспортного средства 202, а точнее - с потоком воздуха окружающей среды, проходящим выше отсека двигателя в дорожном транспортном средстве по вертикали относительно земли.
В зависимости от условий работы двигателя и метеоусловий окружающей среды, воздухоочиститель 211 может втягивать воздух либо из заборного канала 242, либо из вспомогательного заборного канала 243, либо из них обоих. В частности, поток воздуха в воздухоочиститель 211 может регулировать впускной клапан 272. Впускной клапан 272 может быть расположен либо в заборном канале 242, либо во вспомогательном заборном канале 243 для регулирования потока воздуха через них. В еще одном примере впускной клапан 272 может представлять собой трехходовой клапан и может быть расположен в месте слияния заборного канала 242 и вспомогательного заборного канала 243. В других примерах впускной клапан 272 может входить в состав воздухоочистителя 211.
Воздухоочиститель 211 можно эксплуатировать в защищенном первом режиме, в котором в воздухоочиститель 211 поступает по существу весь поток всасываемого воздуха из вспомогательного канала 243, но не из заборного канала 242. То есть в защищенном первом режиме в воздухоочиститель 211 может поступать воздух только из шноркеля, но не набегающий воздух, поступивший через решетку 248 радиатора. Воздухоочиститель 211 может быть переключен во второй режим набегающего воздуха, в котором в воздухоочиститель 211 поступает поток воздуха из заборного канала 242. Переключать воздухоочиститель 211 из первого режима во второй и наоборот можно путем изменения положения клапана 272. В других примерах воздухоочиститель 211 выполнен с возможностью приема потока воздуха из отработавших газов в выпускном трубопроводе 235 и с возможностью приема только потока воздуха из выпускного трубопровода 235 при работе в защищенном первом режиме.
Например, если клапан 272 расположен в заборном канале 242, клапан 272 может быть установлен в закрытое первое положение в защищенном первом режиме воздухоочистителя 211, в котором поток воздуха по заборному каналу 242 по существу отсутствует, поэтому по существу весь воздух в систему 200 двигателя поступает по вспомогательному заборному каналу 243. Клапан 272 может быть установлен в открытое второе положение во втором режиме набегающего воздуха воздухоочистителя 211, в котором воздух поступает в воздухоочиститель 211 и из заборного канала 242, и из вспомогательного заборного канала 243.
Компрессор 214 может представлять собой подходящий компрессор всасываемого воздуха, например, приводимый в действие от двигателя или от ведущего вала компрессор нагнетателя. В системе 200 двигателя компрессор показан в виде компрессора турбокомпрессора, механически соединенного с турбиной 216 посредством вала 219, при этом турбину 216 приводят в действие расширяющиеся отработавшие газы двигателя. В одном варианте осуществления компрессор и турбина могут входить в состав турбокомпрессора с двойной улиткой. В еще одном варианте турбокомпрессор может представлять собой турбонагнетатель с изменяемой геометрией ИГТ (VGT), в котором геометрию турбины активно изменяют в зависимости от частоты вращения двигателя и других условий работы.
На ФИГ. 2 показано, что компрессор 214 соединен через охладитель 218 наддувочного воздуха ОНВ (САС) с дроссельной заслонкой 220 (например, впускным дросселем). Например, ОНВ 218 может представлять собой теплообменник с охлаждением воздухом или хладагентом. Дроссельная заслонка 220 соединена с впускным коллектором 222 двигателя. Горячий сжатый воздух из компрессора 214 поступает во вход ОНВ 218, при прохождении через который происходит его охлаждение, и выходит для прохождения через дроссельную заслонку во впускной коллектор 222. Поток 246 воздуха окружающей среды из-за пределов транспортного средства 202 может поступать в двигатель 210 через решетку 248 радиатора в передней части транспортного средства и проходить через ОНВ 218, способствуя охлаждению наддувочного воздуха. В ОНВ 218 возможно образование и скопление конденсата в условиях падения температуры воздуха окружающей среды или во влажную или дождливую погоду, когда происходит охлаждение наддувочного воздуха ниже точки росы по влаге. В одном примере поток холодного воздуха окружающей среды через ОНВ 218 можно регулировать с помощью системы 260 решетки радиатора для борьбы с образованием конденсата и возникновением событий пропуска зажигания в двигателе. В еще одном примере источник поступления воздуха окружающей среды на впуск двигателя можно изменять путем регулирования относительной величины потоков воздуха по заборному каналу 242 и вспомогательному заборному каналу 243 (например, путем изменения положения клапана 272).
В варианте осуществления на ФИГ. 2 система 200 двигателя может содержать датчик 221 температуры воздуха окружающей среды для измерения температуры воздуха окружающей среды, поступающего в систему 200 двигателя. Например, датчик 221 температуры может быть расположен между воздухоочистителем 211 и компрессором 214. Между воздухоочистителем 211 и компрессором 214 также может быть установлен датчик 229 влажности для измерения относительной влажности потока воздуха окружающей среды, поступающего в систему 200 двигателя. Например, датчик 229 влажности может представлять собой датчик кислорода с регулируемым напряжением, работающий при относительно низком первом напряжении, при котором не происходит диссоциация молекул воды, а затем при относительно высоком втором напряжении, при котором диссоциация молекул воды происходит. Влажность воздуха окружающей среды можно оценить по разности показаний датчика 229 при указанных двух напряжениях. Таким образом, система 200 двигателя может быть оснащена датчиками для измерения и/или оценки температуры и влажности воздуха окружающей среды. При этом следует понимать, что в других примерах система 200 двигателя может не содержать датчик 221 и/или датчик 229, и то, что в некоторых примерах контроллер 212 выполнен с возможностью оценки температуры и/или влажности воздуха окружающей среды по полученным по беспроводной связи метеоданным. В других примерах контроллер 212 может оценивать температуру и/или влажность воздуха окружающей среды и по полученным по беспроводной связи метеоданным, и по показаниям датчиков 221 и 229 в той или иной комбинации.
В варианте осуществления на ФИГ. 2 давление заряда воздуха во впускном коллекторе может определять датчик 224 давления воздуха в коллекторе ДВК (MAP), а давление наддува - датчик 227 давления наддува. При этом в некоторых примерах система 200 двигателя может не содержать датчик 224 и/или датчик 227. Перепускной клапан компрессора (не показан) может быть установлен последовательно между входом и выходом компрессора 214. Перепускной клапан компрессора может представлять собой нормально закрытый клапан с возможностью открытия в определенных условиях работы для сброса чрезмерного давления наддува. Например, перепускной клапан компрессора можно открывать в условиях падения частоты вращения двигателя во избежание помпажа в компрессоре.
Дополнительные датчики, например, датчик 223 температуры заряда в коллекторе ТЗК (МСТ) и датчик 225 температуры заряда воздуха ТЗВ (ACT) могут быть установлены для определения температуры всасываемого воздуха в соответствующих местах в заборном канале. При этом в других примерах система 200 двигателя может не содержать датчик 223 и/или датчик 225. В некоторых примерах датчики ТЗК и ТЗВ могут представлять собой термисторы с возможностью определения температуры всасываемого воздуха в канале 242 по их показаниям. Датчик 223 ТЗК может быть расположен между дросселем 220 и впускными клапанами камер 231 сгорания. Датчик 225 ТЗВ может быть расположен выше по потоку от ОНВ 218, как показано, при этом в других вариантах датчик 225 ТЗВ может быть расположен выше по потоку от компрессора 214. Например, по температуре воздуха, совместно с температурой хладагента двигателя, также можно вычислять количество топлива для подачи в двигатель.
Впускной коллектор 222 соединен с группой камер 231 сгорания через группу впускных клапанов (не показаны). В примере на ФИГ. 2 двигатель 210 содержит четыре камеры 231 сгорания. При этом следует понимать, что в других примерах двигатель 210 может содержать больше или меньше четырех камер 231 сгорания.
Топливные форсунки 271 показаны соединенными непосредственно с камерами 231 сгорания для впрыска топлива непосредственно в них пропорционально длительности импульса сигнала ИВТ (FPW) от контроллера 212. Так топливные форсунки 271 обеспечивают известный из уровня техники непосредственный впрыск топлива в камеры 231 сгорания; при этом следует понимать, что также возможен впрыск во впускные каналы. Топливо может поступать в топливные форсунки 271 из топливной системы (не показана), содержащей топливный бак, топливный насос и топливную рампу. Поскольку каждая из камер 231 сгорания может содержать топливную форсунку, в примере на ФИГ. 2 показаны четыре топливные форсунки 271. При этом следует понимать, что количество топливных форсунок может быть больше или меньше четырех в зависимости от количества камер 231 сгорания в двигателе 210.
В процессе, именуемом «зажигание», впрыснутое топливо воспламеняют с помощью таких известных средств, как свеча 273 зажигания, в результате чего происходит сгорание. Любая из камер 231 сгорания может содержать свечу 273 зажигания. Любая свеча 273 зажигания выполнена с возможностью подачи электрической искры, воспламеняющей топливовоздушную смесь в каждой из соответствующих камер 231 сгорания. Момент подачи свечой 273 зажигания электрической искры для воспламенения может именоваться «момент искрового зажигания». А именно, момент искрового зажигания может представлять собой момент во время хода поршня, в который свеча 273 зажигания подает электрическую искру. Момент искрового зажигания может регулировать контроллер 212. В некоторых примерах момент искрового зажигания можно регулировать таким образом, чтобы искра, создаваемая свечой 273 зажигания, возникала до (с опережением) или после (с запаздыванием) заданного изготовителем момента. Например, момент зажигания может быть изменен в сторону запаздывания относительно оптимального момента зажигания ОМЗ (МВТ) для борьбы с детонацией в двигателе или в сторону опережения в условиях высокой влажности. ОМЗ может представлять собой момент искрового зажигания во время такта сжатия (в четырехтактном двигателе), совершаемого поршнем до достижения верхней мертвой точки ВМТ (TDC). Когда момент искрового зажигания изменяют в сторону запаздывания, момент искрового зажигания происходит при положении поршня во время такта сжатия, имеющем место позже ОМЗ. И наоборот, при изменении момента искрового зажигания в сторону опережения, он может происходить при положении поршня во время такта сжатия, имеющем место раньше ОМЗ.
Несмотря на то, что в примере на ФИГ. 2 представлен бензиновый двигатель с искровым зажиганием, следует понимать, что в некоторых примерах система 200 двигателя может быть выполнена в виде дизельного двигателя, в связи с чем она может не содержать свечу 273 зажигания. То есть в некоторых примерах двигатель 210 может быть выполнен дизельным с воспламенением от сжатия.
Камеры 231 сгорания также соединены с выпускным коллектором 236 через группу выпускных клапанов (не показаны). Продукты сгорания из камер 231 сгорания могут выходить в выпускной коллектор 236. В раскрытом варианте осуществления показан одинарный выпускной коллектор 236. При этом в других вариантах осуществления выпускной коллектор 236 может содержать множество секций выпускного коллектора. Конфигурации с множеством секций выпускного коллектора позволяют направлять отходы из разных камер сгорания в разные области в системе двигателя. Универсальный датчик 256 кислорода в отработавших газах УДКОГ (UEGO) показан соединенным с выпускным коллектором 36 выше по потоку от турбины 216. Вместо УДКОГ 256 можно использовать двухрежимный датчик кислорода в отработавших газах.
Как показано на ФИГ. 2, отработавшие газы из одной или нескольких секций выпускного коллектора направляют в турбину 216 для приведения ее в действие. Когда необходим относительно невысокий крутящий момент турбины, некоторое количество отработавших газов может быть направлено через регулятор давления наддува (не показан) в обход турбины. Объединенный поток из турбины 216 и регулятора давления наддува течет далее через устройство 270 снижения токсичности выбросов. Как правило, одно или несколько устройств 270 снижения токсичности выбросов могут включать в себя один или несколько каталитических нейтрализаторов отработавших газов с возможностью каталитической очистки потока отработавших газов и, тем самым, уменьшения содержания в нем одного или нескольких веществ.
Все очищенные отработавшие газы из устройства 270 снижения токсичности выбросов или их часть могут быть сброшены в атмосферу по выпускному трубопроводу 235. При этом, в зависимости от условий работы, некоторое количество отработавших газов может быть перенаправлено в магистраль 251 рециркуляции отработавших газов (РОГ), через охладитель 250 РОГ и клапан 252 РОГ, на вход компрессора 214. Таким образом, компрессор 214 выполнен с возможностью приема отработавших газов, отобранных из области ниже по потоку от турбины 216. Клапан 252 РОГ можно открывать для пропуска регулируемого количества отработавших газов во вход компрессора для достижения необходимых показателей сгорания и снижения токсичности выбросов. Таким образом, система 200 двигателя выполнена с возможностью обеспечения внешней РОГ низкого давления НД (LP). Вращение компрессора 214, в сочетании с относительно длинным путем потока РОГ НД в системе 200 двигателя, обеспечивают гомогенизацию отработавших газов в заряде всасываемого воздуха. Кроме того, расположение точек отбора и смешивания газов РОГ обеспечивает эффективное охлаждение отработавших газов для увеличения массы пригодных для использования газов РОГ и улучшения эксплуатационных показателей. В других вариантах осуществления система РОГ может представлять собой систему РОГ высокого давления с магистралью 251 РОГ, соединяющей область выше по потоку от турбины 216 с областью ниже по потоку от компрессора 214. В некоторых вариантах осуществления датчик 223 ТЗК может быть расположен с возможностью определения температуры заряда в коллекторе по температуре воздуха и отработавших газов, рециркулируемых по магистрали 251 РОГ.
Автотранспортное средство 202 также содержит систему 204 охлаждения, по которой циркулирует хладагент через двигатель 210 внутреннего сгорания, для поглощения тепла отработавших газов и раздачи нагретого хладагента на радиатор 280 и/или сердцевину 290 обогревателя по линиям 282 и 284 хладагента соответственно. В частности, на ФИГ. 2 изображена система 204 охлаждения, соединенная с двигателем 210 и направляющая хладагент двигателя от двигателя 210 на радиатор 280 с помощью приводимого от двигателя водяного насоса 286 и обратно на двигатель 210 по линии 282 хладагента. Приводимый от двигателя водяной насос 286 может быть соединен с двигателем посредством привода 288 переднерасположенных вспомогательных агрегатов ППРВА (FEAD) с возможностью вращения пропорционально частоте вращения двигателя посредством ремня, цепи и т.п. А именно, приводимый от двигателя водяной насос 286 осуществляет циркуляцию хладагента по каналам в блоке цилиндров, головке цилиндров и т.п. для поглощения тепла двигателя для передачи его через радиатор 280 в воздух окружающей среды. В примере, где приводимый от двигателя водяной насос 286 является центробежным, создаваемое им давление (и, соответственно, подача) может быть пропорционально частоте вращения коленчатого вала, которая в примере на ФИГ. 2 прямо пропорциональна частоте вращения двигателя. В еще одном примере насос может иметь привод от мотора с возможностью регулирования независимо от вращения двигателя. Температуру хладагента (например, температуру хладагента двигателя, ТХД (ЕСТ)) может регулировать термостатический клапан 238, расположенный в линии 282 охлаждения с возможностью пребывания в закрытом положении до тех пор, пока температура хладагента не достигнет пороговой. В некоторых примерах ТХД можно определять по открытию термостатического клапана. В других примерах в линии охлаждения может быть расположен датчик 239 температуры для измерения ТХД. Датчик 239 температуры может быть расположен выше или ниже по потоку от термостатического клапана 238. При этом в других примерах система 200 двигателя может не содержать датчик 239 температуры.
Система 200 двигателя может содержать электрический вентилятор 292 для направления потока охлаждающего воздуха к ОНВ 218, системе 204 охлаждения двигателя или иным компонентам системы двигателя. В некоторых вариантах осуществления электрический вентилятор 292 может представлять собой вентилятор охлаждения двигателя. Вентилятор охлаждения двигателя может быть соединен с радиатором 280 для поддержания потока воздуха через радиатор 280, когда транспортное средство 202 движется медленно или остановлено с включенным двигателем. Частоту или направление вращения вентилятора может регулировать контроллер 212. В одном примере система 260 решетки радиатора выполнена с возможностью регулирования положений заслонок 244 решетки радиатора для пропуска воздуха окружающей среды, поступающего в транспортное средство через решетку 248 радиатора, путем открытия или закрытия заслонок 244 решетки радиатора. Заслонки 244 решетки радиатора, расположенные напротив ОНВ 218, выполнены с возможностью адаптивного и/или бесступенчатого регулирования для охлаждения ОНВ 218.
Хладагент может течь по раскрытым выше линии 282 хладагента и/или линии 284 хладагента в сердцевину 290 обогревателя с возможностью передачи тепла в пассажирский салон 206 и обратно в двигатель 210. В некоторых примерах для циркуляции хладагента по линиям 282 и 284 хладагента может быть задействован приводимый от двигателя водяной насос 286.
На ФИГ. 2 также изображена система 228 управления. Система 228 управления может быть соединена с возможностью связи с различными компонентами системы 200 двигателя для выполнения раскрытых в настоящем описании управляющих алгоритмов и действий. Например, как показано на ФИГ. 2, система 228 управления может содержать электронный цифровой контроллер 212. Контроллер 212 может представлять собой микрокомпьютер, содержащий микропроцессорное устройство, порты ввода/вывода, электронную среду хранения исполняемых программ и калибровочных значений, оперативное запоминающее устройство, энергонезависимое запоминающее устройство и шину данных. Как показано на фигуре, контроллер 212 может принимать входные сигналы от множества датчиков 230, в число которых могут входить входные сигналы от водителя и/или датчиков (например, входные сигналы положения передачи в трансмиссии, педали газа (например, положения педали), положения тормозной педали, положения переключателя передач, скорости транспортного средства, частоты вращения двигателя, массового расхода воздуха через двигатель, давления наддува, температуры воздуха окружающей среды от датчика 221 температуры, влажности окружающей среды от датчика 229 влажности, температуры всасываемого воздуха, скорости вентилятора и т.п.), датчиков системы охлаждения (например, датчика 239 ТХД, датчиков скорости вентилятора, температуры пассажирского салона, влажности окружающей среды и т.п.), датчиков ОНВ 218 (например, температуры воздуха на входе ОНВ, датчиков 225 ТЗВ и давления, температуры воздуха на выходе ОНВ, датчика 223 ТЗК и датчиков 224 и 227 давления и т.п.) и других. Кроме того, контроллер 212 может принимать данные от GPS 234 и/или бортовой системы 226 связи и мультимедиа транспортного средства 202. В одном варианте осуществления, в зависимости от темпа изменения ТХД, контроллер может определить будущую ТХД и соответственно оценить первый и второй проходы заслонки решетки радиатора. Контроллер может оценить аэродинамическое сопротивление для двух положений заслонок решетки радиатора и задать окончательное положение заслонок решетки радиатора (между первым и вторым положениями заслонок решетки радиатора) в зависимости от результатов оценки аэродинамического сопротивления, как будет подробнее раскрыто ниже на примере ФИГ. 3.
Кроме того, контроллер 212 выполнен с возможностью связи с различными исполнительными устройствами 232, в число которых могут входить исполнительные устройства двигателя (например, топливные форсунки, электронно-регулируемая дроссельная заслонка всасываемого воздуха, свечи зажигания и т.п.), исполнительные устройства системы охлаждения (например, вентиляционные отверстия и/или распределительные клапаны системы климат-контроля пассажирского салона и т.п.), активные заслонки 244 решетки радиатора и др. В некоторых примерах в указанную среду хранения могут быть введены машиночитаемые данные, представляющие собой команды с возможностью исполнения процессором для выполнения раскрытых ниже способов, а также других предусмотренных, но конкретно не перечисленных вариантов.
Решетка 248 радиатора автотранспортного средства 202 образует проход (например, проход решетки радиатора, проход бамперной решетки и т.п.) для приема потока 246 воздуха окружающей среды через переднюю часть кузова транспортного средства или расположенную рядом с ней область в отсек двигателя. Поток 246 воздуха окружающей среды может быть использован радиатором 280, электрическим вентилятором 292 и другими компонентами для поддержания двигателя и/или трансмиссии в охлажденном состоянии. Система 260 решетки радиатора может содержать активные заслонки 244 решетки радиатора АЗРР (AGS), выполненные для регулирования величины потока воздуха, поступающего через решетку 248 радиатора. Поток 246 воздуха окружающей среды также может отбирать тепло из системы кондиционирования воздуха транспортного средства и улучшать эксплуатационные показатели двигателей с турбонаддувом/наддувом, оснащенных ОНВ 218, снижающим температуру воздуха, поступающего во впускной коллектор/двигатель. В одном примере электрический вентилятор 292 выполнен с возможностью регулирования для дополнительного увеличения или уменьшения потока воздуха на компоненты двигателя.
Обратимся к ФИГ. 3-8, иллюстрирующим примеры способов для изменения параметров работы двигателя в зависимости от показаний датчиков транспортного средства и/или полученных по беспроводной связи метеоданных. Способы, раскрытые ниже на ФИГ. 3-8, могут быть сохранены в долговременной памяти контроллера двигателя (например, контроллера 212, раскрытого выше на ФИГ. 2) с возможностью выполнения их контроллером в зависимости от показаний различных датчиков двигателя и/или транспортного средства, например, датчика температуры воздуха окружающей среды (например, датчика 221 температуры, раскрытого выше на ФИГ. 2) и датчика влажности окружающей среды (например, датчика 229 влажности, раскрытого выше на ФИГ. 2). Дополнительно или взамен, контроллер двигателя может выполнять указанные способы в зависимости от полученных по беспроводной связи метеоданных.
На ФИГ. 3 раскрыт первый способ 300 для изменения по меньшей мере одного параметра работы двигателя в зависимости от показаний одного или нескольких датчиков двигателя и/или полученных по беспроводной связи метеоданных. Выполнение способа 300 начинают на шаге 302, на котором получают показания одного или нескольких датчиков двигателя, относящиеся к метеопараметрам и/или условиям работы двигателя. Метеопараметры могут включать в себя результаты измерения параметров окружающей среды транспортного средства, в том числе одного или нескольких из следующих: влажности окружающей среды, давления окружающей среды, температуры воздуха окружающей среды, количества осадков, типа осадков, вероятности осадков, скорости ветра, направления ветра, точки росы и т.п.
Например, способ 300 на шаге 302 может предусматривать получение показаний от датчика температуры воздуха окружающей среды, соответствующих результату измерения температуры всасываемого воздуха, и/или показаний от датчика влажности окружающей среды, соответствующих результату измерения влажности всасываемого воздуха. В дополнительных примерах способ 300 на шаге 302 может предусматривать получение показаний от дополнительных датчиков двигателя, например, различных датчиков давления (например, датчиков 224 и 227 давления, раскрытых выше на ФИГ. 2), датчиков кислорода (например, УДКОГ 256, раскрытого выше на ФИГ. 2) и т.п. То есть на шаге 302 контроллер может оценивать условия работы двигателя по полученным показаниям от различных датчиков двигателя.
В некоторых примерах способ 300 на шаге 302 может предусматривать создание моделей для прогнозирования условий работы двигателя по показаниям, полученным от датчиков двигателя. Например, контроллер может создавать модели температур на выходе и/или КПД охладителя наддувочного воздуха (например, ОНВ 218, раскрытого выше на ФИГ. 2) и/или радиатора (например, радиатора 280, раскрытого выше на ФИГ. 2). А именно, модели температур на выходе и/или КПД можно создавать по показаниям от датчиков двигателя, например, по результатам оценки температуры воздуха от одного или нескольких датчиков температуры, уровней давления от одного или нескольких датчиков давления и уровней влажности от одного или нескольких датчиков влажности. Например, в основе моделей температуры на выходе и/или КПД для радиатора могут лежать результат оценки температуры воздуха окружающей среды по показаниям датчика температуры воздуха окружающей среды и/или результат оценки температуры хладагента по показаниям датчика температуры хладагента (например, датчика 239 температуры, раскрытого выше на ФИГ. 2). Будущие значения температуры на выходе и/или КПД ОНВ можно моделировать по результатам оценки температуры наддувочного воздуха по показаниям датчика температуры наддувочного воздуха (например, датчика 225 температуры, раскрытого выше на ФИГ. 2), и/или результатам оценки относительной влажности по показаниям датчика влажности, и/или результатам оценки давления наддува по показаниям датчика давления наддувочного воздуха (например, датчика 227 давления, раскрытого выше на ФИГ. 2). То есть способ 300 на шаге 302 может дополнительно предусматривать прогнозирование будущих условий работы двигателя и/или метеопараметров по показаниям, полученным от датчиков двигателя.
Затем способ 300 переходит с шага 302 на шаг 304, на котором определяют достоверность показаний датчиков двигателя, полученных на шаге 302. Один пример способа для определения достоверности показания каждого из датчиков двигателя раскрыт ниже на примере ФИГ. 4. Например, достоверность показаний датчика влажности может быть изменена в зависимости от влажности окружающей среды и величины потока вторичных отработавших газов, например, величины рециркуляции отработавших газов. Способ 300 может реализовать способ 400, раскрытый ниже на примере ФИГ. 4, на шаге 304. То есть способ 400 на ФИГ. 4 может быть реализован как подпрограмма способа 300 на шаге 304.
Затем способ 300 следует с шага 304 на шаг 306, на котором получают метеоданные по меньшей мере для метеопараметра, измеренного одним или несколькими датчиками двигателя на шаге 302. А именно, метеоданные могут включать в себя результаты оценки параметров окружающей среды, измеренных датчиками двигателя на шаге 302. Например, метеоданные могут включать в себя результаты оценки одного или нескольких метеопараметров, например, температуры воздуха окружающей среды и влажности окружающей среды. То есть результаты оценки одного или нескольких метеопараметров могут быть получены и из показаний датчиков двигателя, входящих в состав системы двигателя, и из метеоданных.
Способ 300 на шаге 306 может предусматривать получение по беспроводной связи метеоданных, содержащих множество различных метеопараметров, при этом метеопараметры отражают параметры среды, окружающей транспортное средство.
Как раскрыто выше на примере ФИГ. 1, метеоданные могут быть получены контроллером через модуль беспроводной связи (например, телематический блок 30, раскрытый выше на ФИГ. 1), осуществляющий беспроводную связь с одним или несколькими удаленными серверами (например, удаленными серверами 16, раскрытыми выше на ФИГ. 1), получающими метеоданные от метеослужб и/или метеостанций. Метеоданные, полученные на шаге 306, могут соответствовать метеоусловиям в месте, наиболее близком к текущему географическому местоположению транспортного средства (например, транспортного средства 202, раскрытого выше на примере ФИГ. 2), в котором были выполнены измерения метеопараметров. То есть на шаге 306 могут быть получены результаты измерения метеопараметров в месте, наиболее близком к текущему местоположению транспортного средства. Таким образом, на шаге 306 могут быть получены результаты измерения метеопараметров от наиболее близкой к текущему местоположению транспортного средства метеостанции. В других примерах метеоданные, полученные на шаге 306, могут представлять собой прогнозные метеоусловия для текущего географического местоположения транспортного средства, при этом результат оценки прогнозных метеоусловий может быть получен на основе результатов измерения метеопараметров неподалеку и с помощью одной или нескольких вычислительных моделей.
Получив метеоданные на шаге 306, способ 300 следует на шаг 308, на котором определяют достоверность полученных метеоданных. Один пример способа для определения достоверности полученных метеоданных раскрыт ниже на примере ФИГ. 5. Например, достоверность метеоданных может зависеть от расстояния между местом, где были измерены метеоданные, и текущим местоположением транспортного средства. Способ 300 может реализовать способ 500, раскрытый ниже на примере ФИГ. 5, на шаге 308. То есть способ 500 на ФИГ. 5 может быть реализован как подпрограмма способа 300 на шаге 308.
Затем способ 300 может перейти с шага 308 на шаг 310, на котором проверяют, превышает ли результат оценки достоверности метеоданных на шаге 308 достоверность показаний датчиков двигателя, определенную на шаге 304. А именно, способ 300 на шаге 310 может предусматривать проверку того, превышает ли достоверность метеоданных достоверность показаний одного или нескольких датчиков двигателя для того или иного метеопараметра. Например, контроллер может проверить, являются ли результаты измерения температуры воздуха окружающей среды, полученные из метеоданных, более достоверными, чем результаты измерения температуры воздуха окружающей среды, полученные из показаний датчика температуры воздуха окружающей среды. В еще одном примере контроллер может проверить, является ли результат измерения влажности окружающей среды, полученный из метеоданных, более достоверным, чем результат измерения влажности окружающей среды, полученный из показаний датчика влажности окружающей среды. В еще одном примере, контроллер может проверить, является ли результат измерения давления окружающей среды, полученный из метеоданных, более достоверным, чем результат измерения давления окружающей среды, полученный из показаний датчика давления окружающей среды. Следует понимать, что выше приведены неограничивающие примеры различных метеопараметров, результаты измерения которых могут быть получены и от датчика двигателя, и из полученных метеоданных, и то, что на шаге 310 можно сравнивать достоверность результатов измерений, полученных от того или иного датчик двигателя, и из полученных метеоданных, и для других метеопараметров без отступления от объема раскрытого в настоящем описании способа 300. Если результаты измерения того или иного метеопараметра были получены и из метеоданных, и от одного или нескольких датчиков двигателя, способ 300 следует на шаг 310 и сравнивает достоверность указанных двух результатов измерения.
Таким образом, способ 300 может содержать шаги, на которых: получают первый результат измерения первого метеопараметра от одного или нескольких датчиков двигателя, получают второй результат измерения указанного первого метеопараметра из полученных по беспроводной связи метеоданных, определяют достоверности первого и второго результатов измерения, и сравнивают достоверности первого и второго результатов измерения. Способ 300 может дополнительно содержать шаг, на котором определяют, были ли результаты измерения для того или иного метеопараметра получены и из метеоданных, и от одного или нескольких датчиков двигателя. Если результат измерения для метеопараметра был получен только из метеоданных или только от датчиков двигателя, способ 300 может изменить по меньшей мере один параметр работы двигателя в зависимости от полученного результата измерения. При этом, если результаты измерения для того или иного метеопараметра были получены и из метеоданных, и от одного или нескольких датчиков двигателя, способ 300 может выполнить шаг 310 и сравнить достоверности указанных двух результатов измерения. Кроме того, способ 300 может продолжить сравнивать достоверность метеоданных и достоверность показаний одного или нескольких датчиков двигателя для каждого метеопараметра, результаты измерения которого были получены и из метеоданных, и от одного или нескольких датчиков транспортного средства.
Если на шаге 310 будет установлено, что достоверность метеоданных не превышает достоверность показаний одного или нескольких датчиков двигателя, способ 300 может перейти с шага 310 на шаг 312, на котором изменяют по меньшей мере один параметр работы двигателя по показаниям одного или нескольких датчиков двигателя. В некоторых примерах способ 300 на шаге 312 может не предусматривать изменение по меньшей мере одного параметра работы двигателя в зависимости от метеоданных. Параметр работы двигателя может представлять собой один или несколько из следующих: количество впрыскиваемого топлива, момент впрыска топлива, массовый расход РОГ, положение клапана РОГ (например, клапана 252 РОГ, раскрытого выше на ФИГ. 2), момент зажигания, путь поступления всасываемого воздуха через воздухоочиститель (например, воздухоочиститель 211, раскрытый выше на ФИГ. 2) и т.п. На ФИГ. 6-8 раскрыты примеры способов для изменения различных параметров работы двигателя. Например, поток РОГ и, следовательно, положение клапана РОГ можно изменять в зависимости от результата оценки влажности окружающей среды по показаниям датчика влажности окружающей среды. Затем способ 300 совершает возврат.
Если на шаге 310 будет установлено, что достоверность метеоданных превышает достоверность показаний одного или нескольких датчиков двигателя, способ 300 может перейти с шага 310 на шаг 314, на котором изменяют по меньшей мере один параметр работы двигателя в зависимости от полученных метеоданных. В некоторых примерах способ 300 на шаге 314 может не предусматривать изменение по меньшей мере одного параметра работы двигателя в зависимости от показаний одного или нескольких датчиков двигателя. Затем способ 300 совершает возврат.
С шага 308 способ 300 может, дополнительно или взамен, перейти на шаг 313, на котором проверяют, находится ли достоверность метеоданных ниже пороговой. То есть в некоторых примерах способ 300 может перейти с шага 308 на шаг 313 вместо перехода на шаг 310. Как подробнее раскрыто ниже на примере ФИГ. 5, достоверность метеоданных может быть относительно низкой, если: расстояние между транспортным средством и местом измерения метеопараметра превышает пороговое, и/или выявлен микроклимат, и/или период после предыдущего уточнения метеоданных превышает пороговый. То есть, в некоторых примерах, если расстояние между транспортным средством и местом измерения метеопараметра превышает пороговое, и/или выявлен микроклимат, и/или период после предыдущего уточнения метеоданных превышает пороговый, то достоверность метеоданных может быть ниже пороговой. При этом в других примерах достоверность метеоданных может быть ниже пороговой при наличии не менее двух из следующих условий: расстояние между транспортным средством и местом измерения метеопараметра превышает пороговое, выявлен микроклимат, и период после предыдущего уточнения метеоданных превышает пороговый. В других примерах достоверность метеоданных может быть ниже пороговой, если расстояние между транспортным средством и местом измерения метеопараметра превышает пороговое, выявлен микроклимат, и период после предыдущего уточнения метеоданных превышает пороговый.
В других примерах величина понижения достоверности метеоданных может зависеть от удаленности транспортного средства от ближайшего места измерения метеопараметра, выраженности микроклимата (например, величины отличия микроклимата от окружающего климата) и продолжительности периода после уточнения метеоданных. А именно, величина понижения достоверности метеоданных может быть тем больше, чем больше расстояние между транспортным средством и ближайшим местом измерения метеопараметра, чем больше выражен микроклимат, и чем больше продолжительность периода без уточнения метеоданных. То есть достоверность метеоданных может, в некоторых примерах, быть ниже пороговой в зависимости от удаленности транспортного средства от ближайшего места измерения метеопараметра, продолжительности периода после уточнения метеоданных, и того, находится ли транспортное средство в микроклимате.
Если на шаге 313 достоверность метеоданных ниже пороговой, способ 300 может перейти с шага 313 на шаг 312, и по меньшей мере один параметр работы двигателя может быть изменен в зависимости от показаний датчиков. Таким образом, если достоверность метеоданных ниже пороговой, то по меньшей мере один параметр работы двигателя нельзя изменять в зависимости от метеоданных. Иначе говоря, способ может предусматривать изменение по меньшей мере одного параметра работы двигателя в зависимости только от показаний датчиков двигателя, если будет установлено, что достоверность метеоданных ниже пороговой. Затем способ 300 совершает возврат.
При этом, если на шаге 313 будет установлено, что достоверность метеоданных не ниже пороговой на шаге 313, способ 300 может перейти на шаг 315, на котором проверяют, находится ли достоверность показаний датчика двигателя ниже пороговой. Например, как подробнее раскрыто ниже на примере ФИГ. 4, достоверность каждого из датчиков двигателя и/или транспортного средства можно оценивать по отдельности в зависимости от различных условий работы двигателя и/или параметров окружающей среды. Например, достоверность показаний датчика влажности может быть изменена в зависимости от уровня влажности окружающей среды, и/или расходов вторичного газа и т.п. В еще одном примере, достоверность показаний датчика температуры может быть изменена в зависимости от температуры в отсеке двигателя, и/или температуры двигателя, и/или температуры воздуха окружающей среды и т.п.
Если на шаге 315 будет установлено, что достоверность показаний датчика ниже пороговой, способ 300 может перейти с шага 315 на шаг 314, и по меньшей мере один параметр работы двигателя может быть изменен в зависимости от метеоданных. То есть, если достоверность показаний датчика ниже пороговой, по меньшей мере один параметр работы двигателя нельзя изменять в зависимости от показаний датчика. Иначе говоря, способ может предусматривать изменение по меньшей мере одного параметра работы двигателя в зависимости только от полученных по беспроводной связи метеоданных, если будет установлено, что достоверность показаний датчика ниже пороговой. Затем способ 300 совершает возврат.
Если на шаге 315 будет установлено, что достоверность показаний датчика не ниже пороговой, способ 300 может перейти с шага 315 на шаг 316, на котором корректируют результат оценки метеопараметра в зависимости от относительных достоверностей метеоданных и показаний одного или нескольких датчиков двигателя. То есть способ 300 может, в некоторых примерах, предусматривать использование и метеоданных, и показаний одного или нескольких датчиков двигателя для оценки метеопараметра вместо использования либо метеоданных, либо показаний одного или нескольких датчиков двигателя, как на шагах 312 и 314, раскрытых выше.
На шаге 316 способа 300 объединяют первый результат измерения метеопараметра, полученный из показаний одного или нескольких датчиков двигателя, со вторым результатом измерения метеопараметра, полученным из метеоданных, с получением скорректированного третьего результата оценки метеопараметра. Объединение первого и второго результатов измерения метеопараметра может включать в себя определение среднего значения указанных двух результатов измерения. В дополнительных примерах указанное объединение может включать в себя определение средневзвешенного значения, при этом относительные весовые коэффициенты указанных двух результатов измерения устанавливают в зависимости от достоверности каждого из результатов измерения. Например, скорректированный третий результат оценки может быть ближе к первому результату измерения, чем ко второму результату измерения, если достоверность первого результата измерения превышает достоверность второго результата измерения. Проще говоря, третий результат оценки может быть установлен в зависимости от достоверностей первого и второго результатов измерения, при этом третий результат оценки является средневзвешенным значением, которое ближе к первому или ко второму результату измерения в зависимости от того, чья достоверность выше. Средневзвешенное значение первого и второго результатов измерения может быть скорректировано в зависимости от предыдущих достоверностей результатов измерения, и/или динамики изменения достоверностей результатов измерения, и/или будущих прогнозных достоверностей результатов измерения.
Скорректировав результат оценки метеопараметра в зависимости от относительных достоверностей метеоданных и показаний одного или нескольких датчиков двигателя на шаге 316, способ 300 может перейти на шаг 318, на котором изменяют по меньшей мере один параметр работы двигателя в зависимости от скорректированного результата оценки метеопараметра, полученного на шаге 316. То есть способ 300 на шаге 318 может предусматривать изменение по меньшей мере одного параметра работы двигателя в зависимости от метеоданных и показаний одного или нескольких датчиков двигателя. А именно, способ 300 на шаге 318 предусматривает изменение по меньшей мере одного параметра в зависимости от скорректированного третьего результата оценки метеопараметра, при этом третий результат оценки метеопараметра определяют и по метеоданным, и по показаниям одного или нескольких датчиков двигателя. Затем способ 300 совершает возврат.
Следует понимать, что тот или иной результат оценки метеопараметра, например, температуры воздуха окружающей среды, можно применять для изменения нескольких параметром работы двигателя. Например, в зависимости от влажности окружающей среды можно изменять поток РОГ и момент зажигания. Также следует понимать, что тот или иной параметр работы двигателя можно изменять в зависимости от нескольких метеопараметров. Например, поток РОГ можно изменять в зависимости от влажности окружающей среды, температуры воздуха окружающей среды, точки росы, интенсивности осадков и т.п. Метеопараметры, в зависимости от которых изменяют единственный параметр работы двигателя, могут быть получены либо из показаний одного или нескольких датчиков двигателя, либо из метеоданных, либо из них обоих. Например, параметр работы двигателя можно изменять в зависимости от одного из следующих значений метеопараметров или любой их комбинации: первого результата оценки одного или нескольких метеопараметров только по показаниям одного или нескольких датчиков двигателя, второго результата оценки одного или нескольких метеопараметров только по полученным метеоданным, и третьего результата оценки одного или нескольких метеопараметров путем объединения показаний одного или нескольких датчиков двигателя и полученных метеоданных.
Таким образом, в одном примере параметр работы двигателя может быть изменен в зависимости от первого результата оценки одного или нескольких метеопараметров только по показаниям одного или нескольких датчиков двигателя. В других примерах параметр работы двигателя может быть изменен в зависимости от второго результата оценки одного или нескольких метеопараметров только по полученным метеоданным. В еще одном примере параметр работы двигателя может быть изменен в зависимости от третьего результата оценки одного или нескольких метеопараметров путем объединения показаний одного или нескольких датчиков двигателя и полученных метеоданных. В еще одном примере параметр работы двигателя может быть изменен в зависимости и от первого результата оценки одного или нескольких метеопараметров только по показаниям одного или нескольких датчиков двигателя, и от второго результата оценки одного или нескольких метеопараметров только по полученным метеоданным. В еще одном примере параметр работы двигателя может быть изменен в зависимости и от первого результата оценки одного или нескольких метеопараметров только по показаниям одного или нескольких датчиков двигателя, и от третьего результата оценки одного или нескольких метеопараметров путем объединения показаний одного или нескольких датчиков двигателя и полученных метеоданных. В других примерах параметр работы двигателя может быть изменен в зависимости и от второго результата оценки одного или нескольких метеопараметров только по полученным метеоданным, и от третьего результата оценки одного или нескольких метеопараметров путем объединения показаний одного или нескольких датчиков двигателя и полученных метеоданных. В еще одном примере параметр работы двигателя может быть изменен в зависимости и от первого результата оценки одного или нескольких метеопараметров только по показаниям одного или нескольких датчиков двигателя, и от второго результата оценки одного или нескольких метеопараметров только по полученным метеоданным, и от третьего результата оценки одного или нескольких метеопараметров путем объединения показаний одного или нескольких датчиков двигателя и полученных метеоданных.
Таким образом, способ может содержать шаги, на которых: получают первый результат измерения первого метеопараметра от одного или нескольких датчиков двигателя, получают второй результат измерения указанного первого метеопараметра из полученных по беспроводной связи метеоданных, определяют достоверности первого и второго результатов измерения, сравнивают достоверности первого и второго результатов измерения, и изменяют по меньшей мере один параметр работы двигателя в зависимости от первого результата измерения и/или второго результата измерения.
Обратимся к ФИГ. 4, на которой раскрыт пример способа 400 для определения достоверности показаний одного или нескольких датчиков двигателя, выполненных для измерения того или иного метеопараметра. К выполнению способа 400 можно перейти с шага 304 способа 300, раскрытого выше на ФИГ. 3, в связи с чем он может быть реализован как подпрограмма способа 300 на шаге 304.
Выполнение способа 400 начинают на шаге 402, на котором проверяют наличие осадков. Осадки могут представлять собой дождь, и/или снег, и/или лед, и/или град и т.п. Способ 400 на шаге 402 может дополнительно предусматривать проверку того, надвигаются ли осадки (например, выпадут ли они в течение порогового периода). А именно, способ 400 на шаге 402 предусматривает проверку наличия осадков в текущем географическом местоположении транспортного средства. Проверять наличие осадков можно по полученным по беспроводной связи метеоданным. Полученные метеоданные могут также включать в себя тип осадков и количество осадков (например, объемный расход, массовый расход и т.п.).
Если на шаге 402 будет установлено наличие осадков, способ 400 переходит с шага 402 на шаг 406, на котором понижают достоверность моделей оценки и/или прогнозирования температуры на выходе и/или КПД ОНВ и/или радиатора. То есть достоверности одной или нескольких моделей оценки и/или прогнозирования температуры на выходе и КПД ОНВ и/или радиатора, созданных на шаге 302 способа 300 на ФИГ. 3, могут быть понижены на шаге 406. Модели прогнозирования КПД, созданные на шаге 302 способа 300, могут быть основаны на показаниях одного или нескольких датчиков двигателя, могущих не учитывать влияние осадков на КПД ОНВ и/или радиатора. То есть при усилении осадков может происходить снижение достоверности моделей прогнозирования КПД для ОНВ и/или радиатора, основанных на показаниях датчиков двигателя. Например, КПД ОНВ и/или радиатора могу расти с ростом уровней осадков. Поэтому модели прогнозирования КПД ОНВ и/или радиатора, созданные по показаниям одного или нескольких датчиков двигателя, могут недооценивать фактические КПД ОНВ и/или радиатора при увеличении осадков.
В некоторых примерах на шаге 406 достоверность моделей прогнозирования может быть понижена на заранее заданную величину. При этом в других примерах величина понижения достоверности моделей прогнозирования может зависеть от количества осадков. А именно, достоверность моделей прогнозирования может быть понижена тем больше, чем выше интенсивность осадков.
Способ 400 на шаге 406 может дополнительно предусматривать изменение одной или нескольких моделей температуры на выходе и/или КПД ОНВ и/или радиатора в зависимости от параметров осадков, содержащихся в полученных по беспроводной связи метеоданных. А именно, модели могут быть изменены, исходя из количества осадков, и/или типа осадков, и/или моделей будущих осадков. А именно, указанное изменение может включать в себя увеличение прогнозируемых КПД ОНВ и/или радиатора с ростом интенсивности осадков. Так можно повысить достоверность результатов оценки с помощью моделей температур на выходе и/или КПД ОНВ и/или радиатора. Повышение достоверности результатов оценки КПД ОНВ и/или радиатора позволяет повысить точность приведения параметров работы двигателя, например, количества впрыскиваемого топлива, момента впрыска топлива, момента зажигания, степеней разбавления, потока РОГ и наддува к необходимым уровням и тем самым улучшить эксплуатационные показатели двигателя и сократить выбросы.
Способ 400 может перейти с шага 406 на шаг 408, на котором проверяют, превышает ли температура в отсеке двигателя верхний первый порог. Или же способ 400 может перейти напрямую с шага 402 на шаг 408, если на шаге 402 будет установлено, что осадки отсутствуют. Температура в отсеке двигателя может представлять собой температуру части или отсека транспортного средства (например, транспортного средства 202, раскрытого выше на ФИГ. 2), вмещающего двигатель (например, двигатель 210, раскрытый выше на ФИГ. 2) и/или дополнительные компоненты системы двигателя (например, системы 200 двигателя, раскрытой выше на ФИГ. 2). Как раскрыто выше на примере ФИГ. 2, температуру можно оценивать по показаниям одного или нескольких датчиков температуры, содержащихся в системе двигателя (например, датчиков 221, 225 и 223 температуры). Верхний первый порог может представлять собой заранее заданное значение температуры, могущее храниться в долговременной памяти контроллера.
Если температура в отсеке двигателя превышает верхний первый порог, способ 400 переходит с шага 408 на шаг 412, на котором понижают достоверность показаний датчика температуры воздуха окружающей среды. На датчик температуры воздуха окружающей среды может влиять температура в отсеке двигателя. А именно, достоверность показаний датчика может быть относительно низкой при температурах в отсеке двигателя выше верхнего первого порога. Поэтому достоверность, присвоенная показаниям датчика температуры, может быть понижена, если температура в отсеке двигателя превышает верхний первый порог. В некоторых примерах достоверность показаний датчика температуры может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение достоверности показаний датчика температуры воздуха окружающей среды ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3. То есть в некоторых примерах, если температура в отсеке двигателя превышает верхний первый порог, достоверность показаний датчика температуры воздуха окружающей среды может быть ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3.
При этом в других примерах величина понижения достоверности показаний датчика температуры воздуха окружающей среды может зависеть от температуры в отсеке двигателя, при этом достоверность может быть понижена тем больше, чем больше температура в отсеке двигателя превышает верхний первый порог.
Если на шаге 408 будет установлено, что температура в отсеке двигателя не превышает верхний первый порог, способ 400 может перейти с шага 408 на шаг 414, на котором проверяют, находится ли температура в отсеке двигателя ниже нижнего второго порога. Как раскрыто выше, на датчик температуры воздуха окружающей среды может влиять температура в отсеке двигателя. А именно, достоверность показаний датчика может быть относительно низкой при температурах в отсеке двигателя ниже нижнего второго порога. Поэтому, если на шаге 414 будет установлено, что температура в отсеке двигателя ниже нижнего второго порога, способ 400 может перейти с шага 414 на шаг 412 и понизить достоверность показаний датчика температуры воздуха окружающей среды.
Таким образом, достоверность, присвоенная показаниям датчика температуры, может быть понижена, если температура в отсеке двигателя ниже нижнего второго порога на шаге 412. В некоторых примерах достоверность показаний датчика температуры может быть понижена на заранее заданную величину на шаге 412. В некоторых примерах достоверность показаний датчика температуры может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение достоверности показаний датчика температуры воздуха окружающей среды ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3. Таким образом, в некоторых примерах, если температура в отсеке двигателя ниже нижнего второго порога, достоверность показаний датчика температуры воздуха окружающей среды может быть ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3.
При этом в других примерах величина понижения достоверности может зависеть от температуры в отсеке двигателя, при этом величина понижения достоверности может быть тем больше, чем больше величина, на которую температура в отсеке двигателя ниже нижнего второго порога.
При этом, если на шаге 414 будет установлено, что температура в отсеке двигателя не ниже нижнего второго порога, и то, что температура в отсеке двигателя находится между верхним первым и нижним вторым порогами, способ 400 может перейти с шага 414 на шаг 416, на котором изменяют достоверность показаний датчика температуры в зависимости от температуры в отсеке двигателя. В некоторых примерах достоверность показания датчика температуры, определенная на шаге 304 способа 300, раскрытого выше на ФИГ. 3, может быть оставлена приблизительно такой же на шаге 416. При этом в других примерах достоверность показания датчика температуры, определенная на шаге 304, может быть изменена в зависимости от изменений температуры в отсеке двигателя в пределах между первым и вторым порогами. Например, достоверность показаний датчика температуры может зависеть от фактического уровня температуры. Контроллер может содержать табулированную зависимость, представляющую собой зависимость между уровнями температуры и достоверностями показаний датчика температуры. То есть контроллер может использовать табулированную зависимость для изменения достоверности показаний датчика в зависимости от результата измерения температуры.
Затем способ 400 переходит либо с шага 416, либо с шага 412 на шаг 418, на котором проверяют, превышает ли влажность окружающей среды пороговую. Влажность окружающей среды может оценивать датчик влажности (например, датчик 229 влажности, раскрытый выше на ФИГ. 2), содержащийся в системе двигателя. Дополнительно или взамен, влажность окружающей среды можно оценивать по полученным по беспроводной связи метеоданным. Указанный порог на шаге 418 может представлять собой заранее заданный порог с возможностью хранения в долговременной памяти контроллера. При этом в других примерах указанный порог на шаге 418 может быть изменен в зависимости от условия работы двигателя, например, температуры в отсеке двигателя. Таким образом, величина влияния влажности на достоверность показаний датчика влажности может зависеть от условий работы двигателя.
На датчик влажности окружающей среды может влиять влажность. А именно, достоверность показаний датчика может быть понижена при уровнях влажности выше указанного порога. То есть, если на шаге 418 будет установлено, что влажность превышает пороговую, способ 400 может перейти с шага 418 на шаг 420, на котором понижают достоверность, присвоенную датчику влажности. В некоторых примерах на шаге 420 достоверность показаний датчика влажности окружающей среды может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение достоверности показаний датчика влажности окружающей среды до уровня ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3. Таким образом, в некоторых примерах, когда влажность окружающей среды превышает пороговую, достоверность показаний датчика влажности окружающей среды может быть понижена ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3.
При этом в других примерах величина понижения достоверности показаний датчика влажности окружающей среды может зависеть от влажности окружающей среды, при этом достоверность может быть понижена тем больше, чем больше уровни влажности превышают указанный порог.
Если на шаге 418 будет установлено, что влажность не превышает пороговую, способ 400 может перейти с шага 418 на шаг 422, на котором изменяют достоверность показаний датчика влажности в зависимости от результатов оценки влажности. В некоторых примерах достоверность показаний датчика влажности окружающей среды, определенная на шаге 304 способа 300, раскрытого выше на ФИГ. 3, может быть оставлена приблизительно такой же на шаге 422. При этом в других примерах достоверность показаний датчика влажности, определенная на шаге 304, может быть изменена в зависимости от изменений влажности. Например, достоверность показаний датчика влажности может зависеть от фактического уровня влажности. Контроллер может содержать табулированную зависимость, представляющую собой зависимость между уровнями влажности и достоверностями показаний датчика влажности. То есть контроллер может использовать табулированную зависимость для изменения достоверности показаний датчика в зависимости от результата измерения влажности.
Способ 400 может перейти либо с шага 422, либо с шага 420 на шаг 424, на котором проверяют, превышает ли поток вторичного газа пороговый. Поток вторичного газа может представлять собой поток газа во впускной коллектор (например, впускной коллектор 222, раскрытый выше на ФИГ. 2) системы двигателя из источника, отличного от источника потока воздуха окружающей среды через воздухоочиститель. Так, поток вторичного газа может включать в себя газы рециркуляции отработавших газов низкого давления (РОГ НД), газы рециркуляции отработавших газов высокого давления (РОГ ВД), газы от принудительной вентиляции картера ПВК (PCV), газы от продувки топливных паров из системы улавливания топливных паров УТП (EVAP) и т.п. Величину потока РОГ можно определять по положению клапана РОГ (например, клапана 252 РОГ, раскрытого выше на примере ФИГ. 2), расположенного в магистрали РОГ (например, магистрали 251, раскрытой выше на ФИГ. 2), перепаду давления на клапане, разности давлений в местах соединения магистрали РОГ с выпускным каналом (например, выпускным трубопроводом 235, раскрытым выше на примере ФИГ. 2) и с заборным каналом (например, заборным каналом 242, раскрытым выше на ФИГ. 2) и т.п. Поток от ПВК можно оценить по положению клапана ПВК и разности давлений в картере и во впускном коллекторе. Поток от продувки можно оценить по положению клапана продувки канистры КПК (CPV) и/или разности давлений в канистре улавливания топливных паров и во впускном коллекторе. В некоторых примерах указанный порог на шаге 424 может представлять собой заранее заданный расход потока вторичного газа (например, массовый расход или объемный расход). При этом в других примерах порог на шаге 424 может быть изменен в зависимости от условия работы двигателя, например, влажности, степени разбавления, момента зажигания, КПД ОНВ и т.п.
Если на шаге 424 поток вторичного газа превышает пороговый, способ 400 может перейти с шага 424 на шаг 426, на котором понижают достоверность, присвоенную датчику влажности. В некоторых примерах на шаге 426 достоверность показаний датчика влажности может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение достоверности показаний датчика влажности окружающей среды ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3. То есть в некоторых примерах, если влажность окружающей среды превышает пороговую, достоверность показаний датчика влажности окружающей среды может быть понижена ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3.
При этом в других примерах величина понижения достоверности может зависеть от расхода потока вторичного газа, при этом достоверность может быть понижена тем больше, чем больше расход потока вторичного газа превышает указанный порог.
В других примерах достоверность показаний датчика влажности может быть понижена ниже порога, речь о котором идет выше на шаге 315 способа 300 на ФИГ. 3, только в том случае, если и влажность, и поток вторичного газа превышают соответствующие пороги.
Если на шаге 424 будет установлено, что расход потока вторичного газа не превышает пороговый, способ 400 может перейти с шага 424 на шаг 428, на котором изменяют достоверность показаний датчика влажности в зависимости от расхода потока вторичного газа. В некоторых примерах достоверность показаний датчика влажности окружающей среды, определенная на шаге 304 способа 300, раскрытого выше на ФИГ. 3, может быть оставлена приблизительно такой же на шаге 428. При этом в других примерах достоверность показаний датчика влажности, определенная на шаге 304, может быть изменена в зависимости от изменений расхода потока вторичного газа. Например, достоверность показаний датчика влажности может зависеть от фактического расхода потока вторичного газа. Контроллер может содержать табулированную зависимость, представляющую собой зависимость между расходом потока вторичного газа и достоверностями датчика влажности. Таким образом, контроллер может использовать табулированную зависимость для изменения достоверности показаний датчика в зависимости от результата измерения расхода потока вторичного газа.
Способ 400 может перейти либо с шага 426, либо с шага 428 на шаг 430, на котором проверяют, превышает ли скорость ветра пороговую. Скорость ветра может представлять собой вектор скорости (например, быстроту и направление) ветра относительно неподвижного наблюдателя. В других примерах скорость ветра может представлять собой вектор скорости ветра относительно транспортного средства во время движения последнего. Скорость ветра можно оценивать по полученным по беспроводной связи метеоданным и/или результатам оценки текущей скорости транспортного средства. Пороговая скорость ветра может представлять собой заранее заданную скорость ветра, сохраненную в долговременной памяти контроллера. Если на шаге 430 будет установлено, что скорость ветра превышает пороговую, способ 400 может перейти с шага 430 на шаг 432, на котором понижают достоверность моделей оценки и/или прогнозирования температуры на выходе и/или КПД ОНВ и/или радиатора. То есть достоверности одной или нескольких моделей оценки и/или прогнозирования температуры на выходе и КПД ОНВ и/или радиатора, созданных на шаге 302 способа 300 на ФИГ. 3, может быть понижена на шаге 432. Модели прогнозирования КПД, созданные на шаге 302 способа 300, могут быть основаны на показаниях одного или нескольких датчиков двигателя, могущих не учитывать влияние скорости ветра на КПД ОНВ и/или радиатора. Таким образом, чем выше скорость ветра, тем ниже может быть достоверность моделей прогнозирования КПД для ОНВ и/или радиатора, основанных на показаниях датчиков двигателя. Например, КПД ОНВ и/или радиатора может быть тем выше, чем выше скорость ветра. Поэтому при росте скорости ветра модели прогнозирования КПД ОНВ и/или радиатора, созданные на основе показаний одного или нескольких датчиков двигателя, могу недооценивать фактические КПД ОНВ и/или радиатора.
В некоторых примерах достоверность моделей прогнозирования может быть понижена на заранее заданную величину на шаге 432. При этом в других примерах величина понижения достоверности моделей прогнозирования может зависеть от вектора скорости ветра. А именно, величина понижения достоверности моделей прогнозирования может быть тем больше, чем выше скорость ветра.
Способ 400 на шаге 406 может дополнительно или взамен предусматривать изменение одной или нескольких моделей температуры на выходе и/или КПД ОНВ и/или радиатора в зависимости от информации о скорости ветра из полученных по беспроводной связи метеоданных. А именно, модели могут быть изменены в зависимости от скорости ветра, и/или направления ветра, и/или скорости транспортного средства, и/или направления движения транспортного средства, и/или на основе моделей будущего вектора скорости ветра и траектории транспортного средства. А именно, указанное изменение может включать в себя повышение прогнозируемых КПД ОНВ и/или радиатора при повышении относительных скоростей ветра и транспортного средства. Так можно повысить достоверность результатов оценки моделей температур на выходе и/или КПД ОНВ и/или радиатора. Повышение достоверности результата оценки КПД ОНВ и/или радиатора позволяет повысить достоверность приведения параметров работы двигателя, например, количества впрыскиваемого топлива, момента впрыска топлива, момента зажигания, степени разбавления, потока РОГ и наддува к необходимым уровням и, тем самым, повысить топливную экономичность и эксплуатационные показатели двигателя и сократить выбросы. Затем способ 400 совершает возврат.
Если на шаге 430 будет установлено, что скорость ветра не превышает пороговую, способ 400 переходит с шага 430 на шаг 434, на котором изменяют достоверность, присвоенную моделям прогнозирования температуры на выходе и/или КПД ОНВ и/или радиатора, в зависимости от скорости ветра. А именно, достоверность может быть изменена в зависимости от скорости транспортного средства и потока воздуха окружающей среды относительно друг друга. Контроллер может содержать табулированную зависимость, представляющую собой зависимость между векторами относительной скорости ветра и КПД ОНВ и/или радиатора и/или достоверностями моделей температуры на выходе. То есть контроллер может использовать табулированную зависимость для изменения достоверности одной или нескольких моделей в зависимости от вектора скорости ветра. Затем способ 400 совершает возврат.
Таким образом, способ может содержать шаги, на которых: изменяют достоверность первого результата измерения первого метеопараметра, при этом первый результат измерения получен от одного или нескольких датчиков двигателя, в зависимости от одного или нескольких условий работы двигателя и/или одного или нескольких параметров окружающей среды. А именно, способ может предусматривать понижение достоверности результата измерения температуры воздуха окружающей среды, полученного из показаний датчика температуры воздуха окружающей среды, если результат измерения температуры воздуха окружающей среды превышает верхний первый порог и/или падает ниже нижнего второго порога. Способ может дополнительно или взамен предусматривать понижение достоверности результата измерения влажности воздуха окружающей среды, полученного из показаний датчика влажности окружающей среды, если результат измерения влажности воздуха окружающей среды превышает пороговый, и/или поток вторичного газа во впускной коллектор превышает пороговый.
Обратимся к ФИГ. 5, на которой раскрыт пример способа 500 для определения достоверности полученных по беспроводной связи метеоданных, содержащих один или несколько результатов измерения по меньшей мере одного метеопараметра. Проще говоря, способ 500 можно выполнять для определения достоверности результата измерения метеопараметра из полученных по беспроводной связи метеоданных. К выполнению способа 500 можно перейти с шага 308 способа 300, раскрытого выше на ФИГ. 3, в связи с чем он может быть реализован как подпрограмма способа 300 на шаге 308.
Выполнение способа 500 начинают на шаге 502, на котором проверяют, превышено ли пороговое расстояние до ближайшего места, где был измерен метеопараметр, содержащийся в метеоданных. Как разъяснялось выше на примере ФИГ. 1-3, метеоданные и содержащиеся в них результаты измерения метеопараметров, могут быть получены от метеостанции, оборудованной устройствами для измерения атмосферных параметров. При этом расстояние между транспортным средством и ближайшей метеостанцией может меняться по мере движения транспортного средства. Кроме того, в ходе изменения местоположения транспортного средства ближайшие к транспортному средству метеостанции могут меняться. А именно, способ 500 на шаге 502 может предусматривать определение расстояния между ближайшей метеостанцией, откуда были получены метеоданные и результат измерения метеопараметра, и текущим местоположением транспортного средства. Расстояние может быть вычислено по текущему географическому местоположению транспортного средства, определенному с помощью навигационной системы транспортного средства (например, навигационного модуля 40, раскрытого выше на ФИГ. 1), и второму географическому местоположению ближайшей метеостанции, откуда были получены метеоданные и результат измерения метеопараметра.
Если расстояние между текущим местоположением транспортного средства и местоположением ближайшей метеостанции, откуда были получены метеоданные и результаты измерения метеопараметров, превышает пороговое на шаге 502, способ 500 может перейти с шага 502 на шаг 504, на котором понижают достоверность метеоданных. В некоторых примерах достоверность метеоданных может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. Таким образом, в некоторых примерах, если расстояние между транспортным средством и ближайшим местом измерения метеопараметра превышает пороговое, достоверность метеоданных может быть ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. При этом в других примерах заранее заданная величина может быть меньше той, что обеспечивала бы понижение достоверности метеоданных ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. Таким образом, в некоторых примерах, если расстояние между транспортным средством и ближайшим местом измерения метеопараметра превышает пороговое, достоверность метеоданных может быть выше порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3.
При этом в других примерах величина понижения достоверности метеоданных может зависеть от расстояния между текущим местоположением транспортного средства и метеостанций, при этом достоверность может быть понижена тем больше, чем больше указанное расстояние превышает указанный порог. В некоторых примерах способ 500 на шаге 504 может предусматривать понижение достоверности одного или нескольких результатов измерения только одного метеопараметра. При этом в других примерах способ 500 на шаге 504 может предусматривать понижение достоверности одного или нескольких результатов измерения нескольких метеопараметров. В других примерах способ 500 на шаге 504 может предусматривать понижение достоверности по существу всех результатов измерения метеопараметров, содержащихся в метеоданных. То есть в некоторых примерах достоверность по существу всех последних по времени получения метеоданных может быть понижена. В других примерах достоверности метеопараметров могут быть понижены неравномерно. То есть достоверности результатов измерения первого метеопараметра могут быть понижены больше, чем для второго метеопараметра. В некоторых примерах метеоданные могут быть получены от нескольких метеостанций. В таких примерах достоверность полученных данных можно изменять в зависимости от расстояния между текущим местоположением транспортного средства и местоположением каждой из метеостанций, от которых были получены метеоданные.
Если на шаге 502 будет установлено, что расстояние до ближайшего места измерения метеопараметра не превышает пороговое, способ 500 переходит с шага 502 на шаг 506, на котором изменяют достоверность метеоданных в зависимости от расстояния между местоположением транспортного средства и местом измерения метеопараметра. Например, достоверность метеоданных может быть тем больше, чем меньше расстояние между местоположением транспортного средства и местом измерения метеопараметра. То есть при приближении транспортного средства к метеостанции достоверность метеоданных может расти, а при удалении транспортного средства от метеостанции достоверность метеоданных может падать. Контроллер может содержать табулированную зависимость, представляющую собой зависимость между достоверностями метеоданных и расстоянием от транспортного средства до ближайшего места измерения метеопараметра. Таким образом, контроллер может использовать табулированную зависимость для изменения достоверности одного или нескольких результатов измерения метеопараметров, содержащихся в метеоданных.
Затем способ 500 может перейти либо с шага 504, либо с шага 506 на шаг 508, на котором проверяют, выявлен ли микроклимат. Как разъяснялось выше на примере ФИГ. 1-2, микроклимат может представлять собой зону, искусственное сооружение, рельеф, естественное образование и т.п., где параметры окружающей среды в конкретном месте нахождения транспортного средства могут отличаться от средних значений параметров окружающей среды для региона, где находится транспортное средство. Например, микроклимат может представлять собой крытую зону, лужу, автомойку, туннель, ручей или реку, крытую автостоянку, мост, ущелье и т.п.
В одном примере микроклимат может быть выявлен по географическому местоположению транспортного средства, определенному с помощью навигационной системы. Например, на основании текущего местоположения транспортного средства и с помощью картографической веб-службы может быть установлено, что транспортное средство находится в пределах здания или многоэтажного гаража-стоянки. Картографическая веб-служба может представлять собой картографическую службу, обеспечивающую получение изображений через спутник, планов городов, панорамных видов, данных о дорожной обстановке в режиме реального времени и т.п. Таким образом, при помощи картографической веб-службы контроллер может определить, находится ли транспортное средство в микроклимате. В дополнительных примерах микроклимат можно выявить по разности одного или нескольких первых результатов измерения первого метеопараметра, полученных от одного или нескольких датчиков двигателя, и одного или нескольких вторых результатов измерения первого метеопараметра, полученных из метеоданных. Если для того или иного метеопараметра разность результатов его измерения, полученных из метеоданных и от одного или нескольких датчиков двигателя, превышает пороговую величину, то может быть установлено наличие микроклимата.
Если на шаге 508 будет выявлен микроклимат, способ 500 может перейти с шага 508 на шаг 510, на котором понижают достоверность метеоданных. В некоторых примерах способ 500 на шаге 510 может предусматривать понижение достоверности одного или нескольких результатов измерения только одного метеопараметра. При этом в других примерах способ 500 на шаге 510 может предусматривать понижение достоверности одного или нескольких результатов измерения нескольких метеопараметров. В других примерах способ 500 на шаге 510 может предусматривать понижение достоверности по существу всех результатов измерения метеопараметров, содержащихся в метеоданных. Таким образом, в некоторых примерах достоверность по существу всех последних по времени получения метеоданных может быть понижена. В других примерах достоверность метеоданных для того или иного метеопараметра может быть понижена в зависимости от результата оценки выраженности микроклимата. А именно, степени понижения достоверности метеоданных могут быть тем больше, чем больше степени выраженности микроклимата. Выраженность микроклимата может представлять собой результат оценки разности параметров окружающей среды в микроклимате и в окружающей его среде. Выраженность микроклимата можно оценивать по разности результатов измерения указанного метеопараметра, полученных из метеоданных и от одного или нескольких датчиков двигателя. Таким образом, результат оценки выраженности микроклимата может быть тем больше, чем больше разность результатов измерения метеопараметра, полученных из метеоданных и от одного или нескольких датчиков двигателя. Поэтому достоверность метеоданных может быть понижена в связи с превышением пороговой разности результатов измерения метеопараметра, полученных из метеоданных и от датчика двигателя.
В некоторых примерах на шаге 510 достоверность метеоданных может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение достоверности метеоданных ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. В некоторых примерах, если будет выявлен микроклимат, достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. При этом в других примерах заранее заданная величина может быть меньше той, что обеспечивала бы понижение достоверности метеоданных ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. Таким образом, в некоторых примерах, при выявлении микроклимата, достоверность метеоданных может быть выше порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3.
В других примерах достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3, при одновременном выявлении микроклимата и превышении порога расстояния до места измерения метеопараметра, но не в том случае, когда микроклимат был выявлен, но расстояние до места измерения метеопараметра не превышает пороговое, или когда расстояние до места измерения метеопараметра превышает пороговое, но микроклимат не был выявлен.
Способ 500 может перейти с шага 510 на шаг 512, на котором проверяют, превышен ли пороговый период с последнего по времени уточнения метеоданных. Или же способ 500 может перейти на шаг 512 с шага 508, если микроклимат не будет выявлен на шаге 508.
Как разъяснялось выше на примере ФИГ. 1, транспортное средство может получать регулярные уточнения метеоданных. Однако при потере беспроводной связи между транспортным средством и одним или несколькими удаленными серверами (например, серверами 16, раскрытыми выше на ФИГ. 1), уточнение метеоданных может не происходить до тех пор, пока не будет восстановлена беспроводная связь с удаленными серверами. В некоторых примерах уточнение метеоданных может быть непрерывным во время наличия беспроводной связи между транспортным средством и одним или несколькими удаленными серверами. В других примерах уточнения могут происходить периодически или через регулярные заданные промежутки времени. Порог, о котором идет речь на шаге 512, может представлять собой промежуток времени, превышающий регулярный заданный промежуток времени, через который уточняют метеоданные при наличии беспроводной связи между транспортным средством и одним или несколькими удаленными серверами. При этом в других примерах порог на шаге 512 может представлять собой промежуток времени короче регулярного заданного промежутка времени, через который уточняют метеоданные при наличии беспроводной связи между транспортным средством и одним или несколькими удаленными серверами.
Если на шаге 512 период с последнего по времени уточнения метеоданных превышает пороговый, способ 500 может перейти с шага 512 на шаг 514, на котором понижают достоверность метеоданных. В некоторых примерах на шаге 514 достоверность метеоданных может быть понижена на заранее заданную величину. В некоторых примерах заранее заданная величина может обеспечивать понижение достоверности метеоданных ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. То есть в некоторых примерах, если период с последнего по времени уточнения метеоданных превышает пороговый, достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. При этом в других примерах заранее заданная величина может быть меньше той, что обеспечивала бы понижение достоверности метеоданных ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3. То есть в некоторых примерах, если период с последнего по времени уточнения метеоданных превышает пороговый, достоверность метеоданных может быть ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3.
В других примерах достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3, при наличии всех из следующих условий: микроклимата выявлен, расстояние до места измерения метеопараметра превышает пороговое, и период с последнего по времени уточнения метеоданных превышает пороговый, но не в тех случаях, когда микроклимат был выявлен и период после предыдущего уточнения метеоданных превышает пороговый, но расстояние до места измерения метеопараметра не превышает пороговое, либо когда расстояние до места измерения метеопараметра превышает пороговое и период после предыдущего уточнения метеоданных превышает пороговый, но микроклимат не выявлен, либо когда микроклимат выявлен и расстояние до места измерения метеопараметра превышает пороговое, но период с последнего по времени уточнения метеоданных не превышает пороговый.
При этом в других примерах достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3, если период с последнего по времени уточнения метеоданных превышает пороговый и выявлен микроклимат и/или расстояние до места измерения метеопараметра превышает пороговое. То есть в некоторых примерах достоверность метеоданных может не быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3, в случае наличия только одного из следующих условий: выявление микроклимата, превышение порогового расстояния до места измерения метеопараметра, или превышение порогового периода с последнего по времени уточнения метеоданных. Таким образом, в некоторых примерах достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3, при наличии не менее двух из следующих условий: период с последнего по времени уточнения метеоданных превышает пороговый, выявлен микроклимат, и/или расстояние до места измерения метеопараметра превышает пороговое.
В других примерах достоверность метеоданных может быть понижена ниже порога, речь о котором идет выше на шаге 313 способа 300 на ФИГ. 3, при наличии одного или нескольких из следующих условий: период с последнего по времени уточнения метеоданных превышает пороговый, выявлен микроклимат, и/или расстояние до места измерения метеопараметра превышает пороговое.
Таким образом, достоверность метеоданных может быть изменена в зависимости от расстояния до места измерения метеопараметра, и/или наличия микроклимата, и/или периода с последнего по времени уточнения метеоданных. Окончательный результат изменения достоверности можно сравнить с порогом, раскрытым выше на шаге 313 способа 300 на ФИГ. 3.
В некоторых примерах способ 500 на шаге 514 может предусматривать понижение достоверности одного или нескольких результатов измерения только одного метеопараметра. При этом в других примерах способ 500 на шаге 514 может предусматривать понижение достоверности одного или нескольких результатов измерения нескольких метеопараметров. В других примерах способ 500 на шаге 514 может предусматривать понижение достоверности по существу всех результатов измерения метеопараметров, содержащихся в метеоданных. То есть в некоторых примерах достоверность по существу всех последних по времени получения метеоданных может быть понижена на заранее заданную величину. В других примерах достоверность метеоданных для того или иного метеопараметра может быть понижена на величину, в основе которой лежит период с последнего по времени уточнения метеоданных. А именно, величина понижения достоверности метеоданных может быть тем больше, чем больше период с последнего по времени уточнения метеоданных превышает пороговый. Затем способ 500 совершает возврат.
Или же, если на шаге 512 будет установлено, что период с последнего по времени уточнения метеоданных меньше порогового, способ 500 может перейти с шага 512 на шаг 516, на котором изменяют достоверность метеоданных в зависимости от периода с последнего по времени уточнения метеоданных. А именно, достоверность метеоданных может быть тем больше, чем меньше период с последнего по времени уточнения. То есть, чем меньше времени прошло после уточнения метеоданных, тем достовернее могут быть метеоданные. Затем способ 500 совершает возврат.
На ФИГ. 6-8 раскрыты примеры способов для изменения параметров работы двигателя в зависимости либо от полученных по беспроводной связи метеоданных, либо от показаний одного или нескольких датчиков двигателя, либо и от тех, и от других. То есть способы на ФИГ. 6-8 представляют собой примеры способов для изменения по меньшей мере одного параметра работы двигателя в зависимости от метеоданных и/или показаний датчиков двигателя, как разъяснялось выше в описании шагов 312, 314 и 318 способа 300 на ФИГ. 3. Таким образом, любой из или несколько способов на ФИГ. 6-8 могут быть выполнены на одном или нескольких из шагов 312, 314 и 318 способа 300 на ФИГ. 3. То есть способы 600, 700 и 800 на ФИГ. 6, 7 и 8 соответственно могут быть реализованы как подпрограмма способа 300 на одном или нескольких из шагов 312, 314 и 318.
Параметры работы двигателя могут включать в себя один или несколько из следующих: поток РОГ, момент зажигания, момент впрыска топлива, количество впрыскиваемого топлива, модели КПД ОНВ, модели температуры на выходе ОНВ, модели КПД радиатора, модели температуры на выходе радиатора, путь поступления потока всасываемого воздуха, режим работы воздухоочистителя, температуру под кузовом в зоне выпускной системы и т.п. А именно, на ФИГ. 6 раскрыт пример способа 600 для изменения потока РОГ, момента зажигания, и/или момента впрыска, на ФИГ. 7 - пример способа 700 для регулирования работы заслонок решетки радиатора, а ФИГ. 8 - пример способа для регулирования работы двухрежимного воздухоочистителя.
В частности, на ФИГ. 6 раскрыт пример способа 600 для изменения потока РОГ, момента зажигания, и/или момента впрыска. Выполнение способа 600 начинают на шаге 602, на котором изменяют модели прогнозирования температуры на выходе и/или КПД ОНВ и/или радиатора в зависимости от метеоданных и/или показаний датчиков двигателя. В некоторых примерах на шаге 602 КПД ОНВ, и/или температуру на выходе ОНВ, и/или КПД радиатора, и/или модели КПД радиатора можно определять только по полученным метеоданным. Например, одна или несколько моделей могут быть определены на основе температуры воздуха окружающей среды, влажности окружающей среды, количества осадков, типа осадков и т.п. В других примерах на шаге 602 КПД ОНВ, и/или температуру на выходе ОНВ, и/или КПД радиатора, и/или модели КПД радиатора можно определять только по показаниям одного или нескольких датчиков двигателя. Например, в основу одной или нескольких моделей могут быть положены показания датчика температуры воздуха окружающей среды, и/или датчика влажности окружающей среды, и/или датчика температуры хладагента, и/или одного или нескольких датчиков давления и т.п. В других примерах КПД ОНВ, и/или температура на выходе ОНВ, и/или КПД радиатора, и/или модели КПД радиатора могут быть определены по той или иной комбинации метеоданных и показаний одного или нескольких датчиков двигателя, как подробнее раскрыто ниже на примере шага 318 на ФИГ. 3.
Способ 600 переходит с шага 602 на шаг 604, на котором проверяют, превышает ли температура воздуха окружающей среды верхний первый порог. Верхний первый порог может представлять собой заранее заданную температуру с возможностью хранения в долговременной памяти контроллера. В других примерах первый порог можно изменять в зависимости от условия работы двигателя. Если температура воздуха окружающей среды превышает верхний первый порог, способ 600 переходит с шага 604 на шаг 606, на котором уменьшают поток РОГ. Поток РОГ может быть уменьшен путем изменения положения клапана РОГ (например, клапана 252 РОГ, раскрытого выше на ФИГ. 2) в сторону более закрытого. Поток РОГ может быть уменьшен на заранее заданную величину на шаге 606. В других примерах величина уменьшения потока РОГ может зависеть от температуры воздуха окружающей среды, при этом величина уменьшения потока РОГ может быть тем больше, чем больше температура воздуха окружающей среды превышает верхний первый порог.
Если на шаге 604 температура воздуха окружающей среды не превышает верхний первый порог, способ 600 переходит с шага 604 на шаг 608, на котором проверяют, находится ли температура воздуха окружающей среды ниже нижнего второго порога. Нижний второй порог может представлять собой заранее заданную температуру с возможностью хранения в долговременной памяти контроллера. В других примерах второй порог можно изменять в зависимости от условий работы двигателя. Если температура воздуха окружающей среды ниже нижнего второго порога, способ 600 переходит с шага 608 на шаг 606, на котором уменьшают поток РОГ. Поток РОГ может быть уменьшен путем изменения положения клапана РОГ (например, клапана 252 РОГ, раскрытого выше на ФИГ. 2) в сторону более закрытого. Поток РОГ может быть уменьшен на заранее заданную величину на шаге 606. В других примерах величина уменьшения потока РОГ может зависеть от температуры воздуха окружающей среды, при этом величина уменьшения потока РОГ может быть тем больше, чем сильнее температура воздуха окружающей среды ниже нижнего второго порога.
Если на шаге 608 будет установлено, что температура воздуха окружающей среды не ниже нижнего второго порога и находится между нижним вторым и верхним первым порогами, способ 600 может перейти с шага 608 на шаг 610, на котором изменяют РОГ в зависимости от температуры воздуха окружающей среды. А именно, контроллер может содержать табулированную зависимость, представляющую собой зависимость между расходами потока РОГ и температурами воздуха окружающей среды. То есть контроллер может использовать табулированную зависимость для определения необходимого расхода потока РОГ в зависимости от температуры воздуха окружающей среды с последующим изменением положения клапана РОГ для достижения необходимого расхода потока РОГ.
Способ может перейти либо с шага 610, либо с шага 606 на шаг 612, предусматривающий определение текущей точки росы в ОНВ. В некоторых примерах точка росы может быть указана в метеоданных. В других примерах точка росы может быть вычислена по влажности окружающей среды и давлению в ОНВ, которые могут быть оценены по показаниям датчика давления наддува (например, датчика 227 давления наддува, раскрытого выше на ФИГ. 2), и по величине потока РОГ, которую можно определить по положению клапана РОГ и перепаду давления на клапане. То есть точку росы можно определять по показаниям датчиков двигателя в дополнение или взамен получения ее из метеоданных.
Определив точку росы, способ 600 может перейти на шаг 614, на котором проверяют наличие образования конденсата в охладителе наддувочного воздуха (например, ОНВ 218, раскрытом выше на ФИГ. 2). Образование конденсата в ОНВ возможно, когда температура в ОНВ ниже точки росы. Контроллер может определить, происходит ли образование конденсата в ОНВ, по результату оценки температуры в ОНВ по показаниям датчика температуры, расположенного вблизи ОНВ или в нем (например, датчика 225 температуры заряда воздуха, раскрытого выше на ФИГ. 2).
То есть можно установить наличие образования конденсата в ОНВ на основании того, что температура в ОНВ ниже точки росы. Таким образом, наличие конденсата в ОНВ можно определить по давлению наддувочного воздуха в ОНВ, уровню влажности окружающей среды, величине потока РОГ в ОНВ и температуре воздуха в ОНВ. Наличие конденсата в ОНВ также можно определять с учетом скорости ветра относительно транспортного средства и наличия осадков. Количество конденсата может возрастать с ростом скоростей ветра и/или интенсивности осадков. Точка росы может возрастать с ростом влажности окружающей среды, потока РОГ и давления наддува. То есть температура перехода паров воды в жидкое состояние может расти с ростом влажности, потока РОГ и давления наддува.
Если на шаге 614 будет установлено наличие образования конденсата в ОНВ, способ 600 может перейти с шага 614 на шаг 616, на котором уменьшают поток РОГ. В некоторых примерах на шаге 616 поток РОГ может быть уменьшен на заранее заданную величину. При этом в других примерах величину уменьшения потока РОГ на шаге 616 можно определить по результату оценки величины образования конденсата в ОНВ. Величину образования конденсата в ОНВ можно оценить по разности температуры в ОНВ и точки росы. То есть степень уменьшения потока РОГ может быть тем больше, чем больше разность температуры ОНВ и точки росы, когда температура ОНВ ниже точки росы.
Если на шаге 614 будет установлено, что температура ОНВ выше точки росы, в связи с чем образование конденсата в ОНВ не происходит, способ 600 может перейти с шага 614 на шаг 618, на котором изменяют поток РОГ в зависимости от влажности окружающей среды, и/или температуры воздуха окружающей среды, и/или давления наддува. Например, на основе полученных метеоданных и/или показаний одного или нескольких датчиков двигателя могут быть созданы модели прогнозирования температуры ОНВ и влажности окружающей среды, а поток РОГ можно регулировать для поддержания температуры ОНВ ниже точки росы в прогнозируемых условиях работы двигателя. Таким образом, необходимый поток РОГ можно определить по температуре ОНВ и точке росы, при этом необходимый поток РОГ может представлять собой поток РОГ, обеспечивающий поддержание температуры ОНВ ниже точки росы для уменьшения образования конденсата. В других примерах способ 600 на шаге 618 может предусматривать оставление потока РОГ без изменений.
Затем способ 600 переходит либо с шага 616, либо с шага 618 на шаг 620, предусматривающий определение степени разбавления по влажности окружающей среды и расходу потока РОГ. Например, степень разбавления может возрастать с ростом влажности окружающей среды и расходов потока РОГ. Степень разбавления может представлять собой степень разбавления топлива или интенсивность разбавления топлива в двигателе.
Определив степень разбавления на шаге 620, способ 600 может перейти на шаг 622, на котором изменяют момент зажигания и/или момент впрыска топлива в зависимости от степени разбавления. Например, момент зажигания и/или момент впрыска топлива можно изменять в сторону опережения при падении степени разбавления и в сторону запаздывания при росте степени разбавления. Затем способ 600 совершает возврат.
Обратимся к ФИГ. 7, на которой раскрыт пример способа 700 для регулирования работы заслонок решетки радиатора. А именно, может происходить заклинивание активной системы решетки радиатора (например, системы 260 решетки радиатора, раскрытой выше на ФИГ. 2), содержащей регулируемые заслонки решетки радиатора (например, заслонки 244 решетки радиатора, раскрытые выше на ФИГ. 2) и/или снижение ее функциональных возможностей в случае ухудшения ее характеристик или засорения (например, камнями, грунтом, льдом, снегом и т.п.). Способ 700 представляет собой пример решения для определения того, имеет ли место ухудшение характеристик системы решетки радиатора или просто засорение грунтом, жидкой грязью и т.п., если имеет место ограничение перемещения заслонок решетки радиатора и/или заклинивание заслонок решетки радиатора. Способ 700 также может предусматривать визуальное оповещение водителя транспортного средства о необходимости промывки заслонок решетки радиатора, если будет установлено, что заслонки решетки радиатора засорены (например, жидкой грязью, снегом, льдом, грунтом и т.п.).
Выполнение способа 700 начинают на шаге 702, на котором проверяют, имеет ли место заклинивание одной или нескольких заслонок решетки радиатора (например, заслонок 244 решетки радиатора, раскрытых выше на ФИГ. 2). Наличие заклинивания заслонок решетки радиатора можно установить по управляющим сигналам от контроллера на привод заслонок решетки радиатора. Если не происходит изменение положения заслонок решетки радиатора по соответствующей команде контроллера двигателя, можно установить наличие заклинивания заслонок решетки радиатора. Если на шаге 702 будет установлено отсутствие заклинивания заслонок решетки радиатора, способ 700 может перейти с шага 702 на шаг 704, предусматривающий продолжение регулирования заслонок решетки радиатора в зависимости от условий работы двигателя. Затем способ 700 совершает возврат.
Если на шаге 702 будет установлено наличие заклинивания заслонок решетки радиатора, способ 700 может перейти с шага 702 на шаг 706, на котором проверяют, имели ли место ли осадки, по полученным метеоданным. В некоторых примерах способ 700 на шаге 706 может предусматривать проверку того, имели ли место осадки в течение недавнего порогового периода времени, и/или имели ли место осадки в пороговом количестве. Если осадки отсутствовали, способ 700 может перейти с шага 706 на шаг 708, предусматривающий визуальное оповещение пользователя транспортного средства о возможном ухудшении характеристик заслонок решетки радиатора и/или необходимости их техобслуживания. Например, оповещение об ухудшении характеристик заслонок решетки радиатора может быть представлено водителю транспортного средства на экране устройства отображения (например, устройства 38 визуального отображения, раскрытого выше на ФИГ. 1). Затем способ 700 совершает возврат.
Если будет установлено, что осадки имели место, способ 700 может перейти с шага 706 на шаг 710, на котором проверяют, находится ли транспортное средство на грунтовой дороге. Установить, находится ли транспортное средство на грунтовой дороге, можно с помощью навигационной системы и/или картографической веб-службы, как подробнее разъяснялось выше на примере ФИГ. 1. Если транспортное средство не находится на грунтовой дороге, способ 700 может перейти с шага 710 на шаг 708 и визуально оповестить пользователя транспортного средства о возможном ухудшении характеристик заслонок решетки радиатора. Затем способ 700 совершает возврат.
Если на шаге 710 будет установлено, что транспортное средство находится на грунтовой дороге, способ 700 может перейти с шага 710 на шаг 712, предусматривающий оповещение пользователя транспортного средства о необходимости промывки решетки радиатора. Оповещение может быть представлено пользователю транспортного средства на экране устройства отображения. В других примерах оповещение может быть представлено пользователю транспортного средства посредством звуковых сигналов. Таким образом, в некоторых примерах водитель транспортного средства может быть оповещен о необходимости промывки решетки радиатора, если имеет место заклинивание заслонок решетки радиатора, недавно имели место осадки, и транспортное средство едет по грунтовой дороге.
В других примерах способ 700 может проследовать непосредственно с шага 706 на шаг 712, если на шаге 706 будет установлено, что имели место осадки, и не выполнять шаг 710. То есть в некоторых примерах водитель транспортного средства может быть оповещен о необходимости промывки решетки радиатора, если недавно имели место осадки, и имеет место заклинивание заслонок решетки радиатора. В других примерах способ 700 может не выполнять шаг 706 и перейти напрямую с шага 702 на шаг 710, если на шаге 702 будет установлено, что имеет место заклинивание заслонок решетки радиатора. То есть в некоторых примерах водитель транспортного средства может быть оповещен о необходимости промывки решетка радиатора, если транспортное средство едет по грунтовой дороге, и имеет место заклинивание заслонок решетки радиатора. Оповестив пользователя транспортного средства о необходимости промывки решетки радиатора на шаге 712, способ 700 совершает возврат.
Перейдем к ФИГ. 8, на которой раскрыт пример способа 800 для регулирования работы двухрежимного воздухоочистителя. А именно, пример способа 800 позволяет изменять источник поступления потока воздуха окружающей среды в воздухоочиститель (например, воздухоочиститель 211, раскрытый выше на ФИГ. 2). Воздухоочиститель может быть соединен с двумя или более источниками газов (например, воздуха окружающей среды) с возможностью регулирования величины потока воздуха (например, массового расхода, объемного расхода и т.п.), поступающего в него из каждого из этих источников. Например, воздухоочиститель можно эксплуатировать в режиме, предусматривающем поступление в него набегающего воздуха из заборного канала (например, заборного канала 242, раскрытого выше на ФИГ. 2), как разъяснялось выше на примере ФИГ. 2. Дополнительно или взамен, воздухоочиститель можно эксплуатировать в режиме, предусматривающем поступление в него всасываемого воздуха из шноркеля (например, вспомогательного заборного канала 243, раскрытого выше на ФИГ. 2), принимающего поток воздуха окружающей среды в положении, находящемся выше по вертикали, чем заборный канал в дорожном транспортном средстве. Воздухоочиститель также можно эксплуатировать в режиме, предусматривающем поступление газов из других источников, например, дополнительных шноркелей, отработавших газов из выпускного канала (например, выпускного трубопровода 235, раскрытого выше на ФИГ. 2) и т.п.
А именно, воздухоочиститель можно эксплуатировать в защищенном первом режиме. В защищенном первом режиме в воздухоочиститель не поступает набегающий воздух из заборного канала. То есть в защищенном первом режиме в воздухоочиститель может поступать поток воздуха только из шноркеля. При этом во втором режиме набегающего воздуха в воздухоочиститель поступает воздух из заборного канала. В некоторых примерах во втором режиме набегающего воздуха в воздухоочиститель может поступать поток воздуха только из заборного канала. Следует понимать, что воздухоочиститель выполнен с возможностью переключения из одного из указанных двух режимов в другой и, тем самым, изменения источника поступающего в него потока воздуха путем изменения положения клапана (например, клапана 272, раскрытого выше на ФИГ. 2), расположенного в заборном канале, или в шноркеле, или в месте слияния заборного канала и шноркеля, или в воздухоочистителе. Контроллер (например, контроллер 212, раскрытый выше на ФИГ. 2) может направлять электрические сигналы (например, путем изменения электрического напряжения и/или тока) на привод клапана для изменения пути поступления воздуха в воздухоочиститель. В настоящем описании способа 800, регулирование работы воздухоочистителя может означать изменение положения клапана или иного исполнительного устройства, посредством которого изменяют источник потока воздуха окружающей среды, втягиваемого в воздухоочиститель. Путем изменения положения клапана, контроллер может регулировать относительное количество воздуха, поступающего в воздухоочиститель из заборного канала и вспомогательного заборного канала или шноркеля.
Выполнение способа 800 начинают на шаге 802, на котором проверяют наличие осадков в набегающем воздухе, поступающем в заборный канал. Наличие осадков в набегающем воздухе может быть выявлено на основании полученных метеоданных, и/или дорожных условий, и/или показаний датчика влажности. Например, наличие осадков в набегающем воздухе может быть установлено, если полученные метеоданные указывают на то, что имеют место осадки, и/или дорога, по которой едет транспортное средство, залита водой, и/или транспортное средство едет в зоне с высоким уровнем воды, и/или температура в заборном канале ниже точки росы и т.п.
При наличии осадков в набегающем воздухе, поступающем в заборный канал, способ 800 может перейти с шага 802 на шаг 804, предусматривающий использование защищенного второго канала (например, вспомогательного заборного канала 243, раскрытого выше на ФИГ. 2) в качестве пути поступления всасываемого воздуха во впускной коллектор (например, впускной коллектор 222, раскрытый выше на ФИГ. 2). То есть на шаге 804 воздухоочиститель может быть переключен в защищенный первый режим, в связи с чем в воздухоочиститель и впускной коллектор не может поступать поток воздуха из заборного канала. В некоторых примерах в воздухоочиститель может поступать только поток воздуха из защищенного второго канала. Затем способ 800 совершает возврат.
Если на шаге 802 будет установлено, что осадки в набегающем воздухе по существу отсутствуют, способ 802 может перейти с шага 802 на шаг 806, на котором проверяют наличие грунта в заборном канале. Проверка наличия грунта в заборном канале может включать в себя проверку того, едет ли транспортное средство по грунтовой дороге, таким же или схожим образом, что и на шаге 710 способа 700 на ФИГ. 7. Если транспортное средство едет по грунтовой дороге, на шаге 806 можно установить наличие грунта в заборном канале. При наличии грунта в заборном канале, способ 800 переходит с шага 806 на шаг 804, и воздухоочиститель переключают в защищенный первый режим. Затем способ 800 совершает возврат.
Если на шаге 806 будет установлено, что грунт в заборном канале по существу отсутствует, способ 800 может перейти с шага 806 на шаг 808, на котором проверяют, находится ли температура воздуха окружающей среды ниже пороговой. Температуру воздуха окружающей среды можно определить по полученным по беспроводной связи метеоданным и/или показаниям датчика температуры воздуха окружающей среды. Если на шаге 808 будет установлено, что температура воздуха окружающей среды ниже пороговой, способ 800 может перейти с шага 808 на шаг 804, и воздухоочиститель переключают в защищенный первый режим. Затем способ 800 совершает возврат.
Если на шаге 808 будет установлено, что температура воздуха окружающей среды не ниже пороговой на шаге 808, способ 800 может перейти на шаг 810, на котором проверяют, превышает ли влажность окружающей среды пороговую. Влажность окружающей среды можно определить по полученным по беспроводной связи метеоданным и/или показаниям датчика влажности окружающей среды. Если влажность окружающей среды превышает пороговую на шаге 810, способ 800 может перейти с шага 810 на шаг 804, и воздухоочиститель переключают в защищенный первый режим. Затем способ 800 совершает возврат.
Если на шаге 810 будет установлено, что влажность окружающей среды не превышает пороговую, способ 800 может перейти с шага 810 на шаг 812, на котором проверяют, находится ли нагрузка двигателя ниже пороговой. Нагрузку двигателя можно определить по запрошенному водителем крутящему моменту, определяемому по входному сигналу от педали акселератора, и/или частоте вращения двигателя, и/или электрическим нагрузкам и т.п. Если на шаге 812 нагрузка двигателя ниже пороговой, способ 800 может перейти с шага 812 на шаг 804, и воздухоочиститель переключают в защищенный первый режим. Затем способ 800 совершает возврат.
Если на шаге 812 будет установлено, что нагрузка двигателя не ниже пороговой, способ 800 может проследовать с шага 812 на шаг 814, предусматривающий продолжение использования заборного канала для поступления потока воздуха окружающей среды во впускной коллектор для создания необходимого крутящего момента двигателя. То есть на шаге 814 воздухоочиститель эксплуатируют во втором режиме набегающего воздуха. Таким образом, если нагрузка двигателя превышает пороговую, влажность ниже пороговой, и/или температура воздуха окружающей среды превышает пороговую, и/или в заборном канале по существу отсутствуют грунт и осадки, то по заборному каналу можно подавать больший поток воздуха во впускной коллектор для создания необходимого крутящего момента двигателя. Таким образом, режим работы воздухоочистителя можно изменять в зависимости от интенсивности осадков, и/или дороги, по которой едет транспортное средство, и/или температуры воздуха окружающей среды, и/или влажности окружающей среды, и/или нагрузки двигателя. В некоторых примерах воздухоочиститель может быть переключен в защищенный первый режим, если нагрузка двигателя ниже пороговой, при этом в набегающем воздухе присутствуют осадки, и/или в заборном канале присутствует грунт, и/или температура воздуха окружающей среды ниже пороговой, и/или влажность превышает пороговую. Кроме того, воздухоочиститель нельзя переключать в защищенный первый режим, когда нагрузка двигателя превышает пороговую, даже если в набегающем воздухе присутствуют осадки, и/или в заборном канале присутствует грунт, и/или температура воздуха окружающей среды ниже пороговой, и/или влажность превышает пороговую.
Перейдем к ФИГ. 9, на которой изображена диаграмма 900, иллюстрирующая изменения потока РОГ и момент зажигания при изменении условий работы двигателя. А именно, примеры изменений момента зажигания представлены на графике 902, а примеры изменений потока РОГ - на графике 904. Как разъяснялось выше на примере ФИГ. 7, поток РОГ можно изменять в зависимости от результата оценки содержания конденсата в охладителе наддувочного воздуха (например, в ОНВ 218, раскрытом выше на ФИГ. 2), температуры на выходе ОНВ, КПД ОНВ и т.п., при этом содержание конденсата может быть оценено по влажности, температуре воздуха окружающей среды и т.п. График 906 представляет примеры изменений результатов оценки уровней конденсата в ОНВ, а график 908 представляет примеры изменений влажности окружающей среды. График 912 представляет примеры изменений температуры воздуха окружающей среды. Результат оценки КПД ОНВ может меняться в зависимости от уровней осадков и скорости ветра. График 910 представляет примеры изменений скорости ветра, а график 914 представляет примеры изменений интенсивности осадков.
Как разъяснялось выше на примере ФИГ. 2, момент зажигания можно изменять в сторону опережения или запаздывания относительно оптимального момента зажигания (ОМЗ). Поток РОГ может быть оценен по положению клапана РОГ (например, клапана 252 РОГ, раскрытого выше на примере ФИГ. 2), расположенного в магистрали РОГ (например, магистрали 251, раскрытой выше на ФИГ. 2), и/или перепаду давления на клапане, и/или разности давлений в местах соединения магистрали РОГ с выпускным каналом (например, выпускным трубопроводом 235, раскрытым выше на примере ФИГ. 2) и заборным каналом (например, заборным каналом 242, раскрытым выше на ФИГ. 2) и т.п. Влажность может представлять собой относительную влажность окружающей среды, и, как разъяснялось выше на примере ФИГ. 3, влажность может быть оценена либо по показаниям датчика влажности (например, датчика 229 влажности, раскрытого выше на ФИГ. 1), либо по метеоданным, полученным по беспроводной связи от системы связи транспортного средства (например, телематического блока 30, раскрытого выше на ФИГ. 1), либо и по тем, и по другим. Аналогичным образом, температура может представлять собой температуру воздуха окружающей среды за пределами транспортного средства (например, транспортного средства 202, раскрытого выше на ФИГ. 2), при этом температура воздуха окружающей среды может быть оценена либо по полученным по беспроводной связи метеоданным, либо по показаниям датчика температуры (например, датчика 221 температуры, раскрытого выше на ФИГ. 1), либо и по тем, и по другим. Скорость ветра может представлять собой вектор скорости (например, скорость и направление) ветра относительно транспортного средства, если транспортное средство неподвижно. В других примерах скорость ветра может представлять собой вектор скорости ветра относительно транспортного средства при движении транспортного средства. Скорость ветра можно оценивать по полученным по беспроводной связи метеоданным и/или результатам оценки текущей скорости транспортного средства. Уровни осадков могут представлять собой объемный и/или массовый расход осадков (например, дождя, снега, града и т.п.) с возможностью их оценки по полученным по беспроводной связи метеоданным.
Момент зажигания может изменять контроллер (например, контроллер 212) путем изменения электрического сигнала (например, напряжения и/или тока), например, сигнала широтно-импульсной модуляции, подаваемого на одну или несколько свечей зажигания (например, свечу 272 зажигания, раскрытую выше на ФИГ. 2). Поток РОГ можно изменять, изменяя положение клапана РОГ. Положение клапана РОГ можно изменять от полностью закрытого первого положения до полностью открытого второго положения с возможностью установки в любое положение между ними, например, посредством электрических сигналов от контроллера на привод клапана РОГ. В полностью закрытом положении газы РОГ по существу не могут течь через клапан в заборный канал, при этом величина потока РОГ в заборный канал может расти при изменении отклонения положения клапана в сторону полностью открытого, при этом проход, образуемый клапаном, растет с ростом отклонения в сторону полностью открытого положения.
До t1 уровни влажности могут возрастать с низкого первого уровня (график 908), а температура воздуха окружающей среды может быть относительно постоянной в районе высокого первого уровня (график 912). В связи с ростом уровней влажности, до t1 уровни конденсата в ОНВ могут расти (график 906). Уровни осадков могут находиться на низком первом уровне. В некоторых примерах до t1 осадки по существу отсутствуют. Скорость ветра (график 910) до t1 может находиться на соответствующем низком первом уровне. Поток РОГ (график 904) до t1 может находиться на высоком первом уровне. В связи с ростом влажности и уровней конденсата до t1, момент зажигания можно изменять в сторону опережения от ОМЗ. А именно, величина изменения момента зажигания в сторону зажигания может быть пропорциональна росту уровней конденсата.
В момент t1 уровень влажности может продолжить рост, а уровни конденсата могут превысить порог, представленный графиком 905 на ФИГ. 9. В связи с превышением уровнями конденсата указанного порога в момент t1, поток РОГ может быть уменьшен с высокого первого уровня, на котором он находился до t1, до низкого второго уровня, при этом второй уровень ниже первого. То есть в момент t1 поток РОГ уменьшают. Момент зажигания может все также опережать ОМЗ. Температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня, скорость ветра может пребывать около низкого первого уровня, а осадки могут оставаться на низком первом уровне в момент t1.
Между t1 и t2 уровни конденсата могут упасть из-за уменьшения потока РОГ. Поток РОГ может пребывать около низкого второго уровня между t1 и t2, а момент зажигания может быть изменен в сторону запаздывания ближе к ОМЗ из более опережающего положение, достигнутого в момент t1. Уровни влажности могут оставаться относительно постоянными на высоком втором уровне, осадки могут оставаться на низком первом уровне, температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня, а скорость ветра может оставаться на низком первом уровне между t1 и t2.
В момент t2 скорость ветра может возрасти с низкого первого уровня, в связи с чем уровни конденсата могут начать расти в момент t2. Момент зажигания может быть возвращен приблизительно к ОМЗ в момент t2, а РОГ может оставаться на низком втором уровне. Уровни влажности могут оставаться относительно постоянными на высоком втором уровне, осадки могут оставаться на низком первом уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня в момент t2.
Между t2 и t3 скорость ветра может продолжить рост, в связи с чем уровни конденсата могут продолжить расти. Момент зажигания может оставаться около ОМЗ между t2 и t3, а РОГ может оставаться на низком втором уровне. Уровни влажности могут оставаться относительно постоянными на высоком втором уровне, осадки могут оставаться на низком первом уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня между t2 и t3.
В момент t3 скорость ветра может прекратить расти и может достигнуть высокого второго уровня. При этом уровни конденсата могут превысить указанный порог в момент t3, и, в связи с превышением уровнями конденсата указанного порога, поток РОГ может быть уменьшен с низкого второго уровня до низкого третьего уровня, при этом низкий третий уровень ниже второго. Момент зажигания может оставаться на уровне ОМЗ, уровни влажности могут оставаться относительно постоянными на высоком втором уровне, осадки могут оставаться на низком первом уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня в момент t3.
Между t3 и t4 скорость ветра может оставаться около высокого второго уровня, а уровни конденсата могут упасть ниже порогового в связи с уменьшением потока РОГ до низкого третьего уровня в момент t3. Поток РОГ может оставаться на низком третьем уровне, момент зажигания может оставаться около ОМЗ, уровни влажности могут оставаться относительно постоянными на высоком втором уровне, осадки могут оставаться на низком первом уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня между t3 и t4.
В момент t4 осадки могут начать расти с низкого первого уровня, в связи с чем могут начать расти уровни конденсата в момент t4. Момент зажигания может оставаться приблизительно в районе ОМЗ в момент t4, а РОГ может оставаться на низком третьем уровне. Уровни влажности могут оставаться относительно постоянными на высоком втором уровне, температура воздуха окружающей среды может оставаться на высоком первом уровне, а скорость ветра может оставаться около высокого второго уровня в момент t4.
Между t4 и t5 осадки могут продолжить рост и могут достигнуть высокого второго уровня. Поэтому уровни конденсата могут продолжить расти между t4 и t5. Момент зажигания может оставаться приблизительно в районе ОМЗ, а РОГ может оставаться на низком третьем уровне между t4 и t5. Уровни влажности могут оставаться относительно постоянными на высоком втором уровне, температура воздуха окружающей среды может оставаться на высоком первом уровне, а скорость ветра может оставаться около высокого второго уровня.
В момент t5 интенсивность осадков может оставаться на высоком втором уровне, а уровни конденсата могут превысить указанный порог в момент t5. В связи с превышением уровнями конденсата указанного порога, поток РОГ может быть уменьшен с низкого третьего уровня до низкого четвертого уровня, при этом низкий четвертый уровень ниже третьего. Момент зажигания может оставаться на уровне ОМЗ, уровни влажности могут оставаться относительно постоянными на высоком втором уровне, скорость ветра может оставаться на высоком втором уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня в момент t5.
Между t5 и t6 интенсивность осадков может оставаться около высокого второго уровня, а уровни конденсата могут упасть ниже порогового в связи с уменьшением потока РОГ до низкого четвертого уровня в момент t5. Поток РОГ может оставаться на низком четвертом уровне, момент зажигания может оставаться около ОМЗ, уровни влажности могут оставаться относительно постоянными на высоком втором уровне, скорость ветра может оставаться около высокого второго уровня, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня между t5 и t6.
В момент t6 интенсивность осадков и влажность могут начать падение с соответствующих высоких вторых уровней. Поэтому уровни конденсата могут продолжить падать в момент t6. Момент зажигания может оставаться на уровне ОМЗ, скорость ветра может оставаться на высоком втором уровне, поток РОГ может оставаться на низком четвертом уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня в момент t6.
Между t6 и t7 интенсивность осадков и влажность могут продолжить падать. Интенсивность осадков может достичь низкого первого уровня, а уровень влажности может упасть до низкого третьего уровня, при этом низкий третий уровень ниже первого. Поэтому уровни конденсата могут продолжить падать между t6 и t7. Момент зажигания может оставаться на уровне ОМЗ, скорость ветра может оставаться на высоком втором уровне, поток РОГ может оставаться на низком четвертом уровне, а температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня между t6 и t7.
В момент t7 скорость ветра может начать падать с высокого второго уровня. Интенсивность осадков может оставаться приблизительно на низком первом уровне, уровни влажности могут продолжить колебание около низкого третьего уровня, а уровни конденсата могут продолжить падать в момент t7. Момент зажигания может оставаться на уровне ОМЗ, температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня, а поток РОГ может оставаться на низком четвертом уровне в момент t7.
Между t7 и t8 скорость ветра может продолжить падать и может достичь низкого первого уровня. Поэтому уровни конденсата могут продолжить падать между t7 и t8. Интенсивность осадков может оставаться приблизительно на низком первом уровне, а уровни влажности могут продолжить колебание около низкого третьего уровня между t7 и t8. Момент зажигания может оставаться на уровне ОМЗ, температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня, а поток РОГ может оставаться на низком четвертом уровне между t7и t8.
В момент t8 поток РОГ может быть увеличен с низкого четвертого уровня в связи с падением уровней конденсата. Уровни конденсата могут достичь относительно низкого уровня в момент t8. Интенсивность осадков может оставаться приблизительно на низком первом уровне, а уровни влажности могут продолжить колебание около низкого третьего уровня в момент t8. Момент зажигания может оставаться на уровне ОМЗ, температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня, а скорость ветра может продолжить колебание в районе низкого первого уровня в момент t8.
Между t8 и t9 увеличение потока РОГ может быть продолжено до достижения высокого пятого уровня. В некоторых примерах высокий пятый уровень может быть выше низкого второго уровня. Уровни конденсата остаются на относительно низком уровне, интенсивность осадков может оставаться приблизительно на низком первом уровне, а уровни влажности могут продолжить колебание около низкого третьего уровня между t8 и t9. Момент зажигания может оставаться на уровне ОМЗ, температура воздуха окружающей среды может продолжить колебание в районе высокого первого уровня, а скорость ветра может продолжить колебание в районе низкого первого уровня между t8 и t9.
В момент t9 температура воздуха окружающей среды может начать падать с высокого первого уровня. Поэтому уровни конденсата могут начать расти в момент t9. Поток РОГ может оставаться около высокого пятого уровня в момент t9. Интенсивность осадков может оставаться приблизительно на низком первом уровне, а уровни влажности могут продолжить колебание в районе низкого третьего уровня в момент t9. Момент зажигания может оставаться на уровне ОМЗ, а скорость ветра может продолжить колебание в районе низкого первого уровня в момент t9.
Между t9 и t10 температура воздуха окружающей среды может продолжить падать и может достичь низкого второго уровня. Соответственно, уровни конденсата могут продолжить расти между t9 и t10, при этом оставаясь ниже порогового. Поток РОГ может оставаться около высокого пятого уровня между t9 и t10. В связи с ростом уровней конденсата, момент зажигания может быть изменен в сторону опережения от ОМЗ между t9 и t10. Интенсивность осадков может оставаться приблизительно на низком первом уровне, уровни влажности могут продолжить колебание в районе низкого третьего уровня, а скорость ветра может продолжить колебание в районе низкого первого уровня между t9 и t10.
В момент t10 поток РОГ могут начать уменьшать в высокого пятого уровня при росте уровней конденсата. Таким образом, в некоторых примерах поток РОГ может быть уменьшен при росте уровней конденсата, даже если уровни конденсата все еще ниже порога, представленного графиком 905. Момент зажигания может быть изменен в сторону запаздывания ближе к ОМЗ в момент t10 в связи с уменьшением потока РОГ в момент t10. Уровни конденсата могут начать падать в момент t10. Температура воздуха окружающей среды может оставаться около низкого второго уровня, интенсивность осадков может оставаться приблизительно на низком первом уровне, уровни влажности могут продолжить колебание в районе низкого третьего уровня между, а скорость ветра может продолжить колебание в районе низкого первого уровня в момент t10.
После t10 поток РОГ может достичь низкого шестого уровня, при этом низкий шестой уровень ниже высокого пятого уровня. Уровни конденсата могут упасть до относительно низких уровней, аналогичных уровням между t6 и t7, а момент зажигания может оставаться около ОМЗ. Температура воздуха окружающей среды может оставаться около низкого второго уровня, интенсивность осадков может оставаться приблизительно на низком первом уровне, уровни влажности могут продолжить колебание в районе низкого третьего уровня, а скорость ветра может продолжить колебание в районе низкого первого уровня после t10.
Таким образом, технический эффект, состоящий в повышении топливной экономичности и сокращении регулируемых выбросов, достигнут за счет получения более достоверных результатов оценки одного или нескольких метеопараметров и текущих условий работы двигателя. Более достоверные результаты оценки одного или нескольких метеопараметров и текущих условий работы двигателя могут быть получены путем использования и полученной по беспроводной связи метеоинформации, и показаний различных датчиков транспортного средства и/или двигателя. А именно, оценка достоверности как полученных по беспроводной связи метеоданных, так и показаний различных датчиков транспортного средства и/или двигателя позволяет контроллеру двигателя принять решение о том, следует ли использовать метеоданные, или показания одного или нескольких датчиков, содержащихся в транспортном средстве, или и те, и другие в той или иной комбинации, для оценки одного или нескольких метеопараметров, параметров окружающей среды, и/или текущих условий работы двигателя. Результаты оценки одного или нескольких метеопараметров, параметров окружающей среды и/или текущих условий работы двигателя могут быть скорректированы в зависимости от достоверности метеоданных и показаний датчиков двигателя. Это позволяет получить более достоверный результат оценки одного или нескольких метеопараметров, параметров окружающей среды и текущих условий работы двигателя, чем в системах транспортных средств, где один или несколько метеопараметров, параметров окружающей среды и/или текущих условий работы двигателя оценивают либо только по метеоданным, либо только по показаниям датчиков транспортного средства.
Например, если показания датчиков двигателя достовернее метеоданных, например, когда отсутствует беспроводная связь между транспортным средством и удаленными серверами, и уточнение метеоданных не происходит в течение времени, превышающего тот или иной период, и/или транспортное средство находится на расстоянии, превышающем пороговое, от ближайшего места измерения метеопараметра, и/или транспортное средство попало в микроклимат, метеопараметры можно оценивать по показаниям датчиков двигателя. В других примерах, когда показания датчиков двигателя достовернее метеоданных, более достоверные результаты оценки метеопараметров могут быть получены путем определения средневзвешенных значений результатов оценки метеопараметров, которые ближе к результатам измерения, полученным отдатчиков двигателя.
И наоборот, когда метеоданные достовернее показаний датчиков двигателя, например, когда температура в отсеке двигателя находится выше верхнего первого порога или ниже нижнего второго порога, и/или влажность превышает пороговую, и/или поток РОГ превышает пороговый, и/или скорость ветра превышает пороговую, метеопараметры можно оценивать по метеоданным. В других примерах, когда метеоданные достовернее показаний датчиков двигателя, более достоверные результаты оценки метеопараметров могут быть получены путем определения средневзвешенных значений результатов оценки метеопараметров, которые ближе к результатам измерения, полученным из метеоданных.
Параметры работы двигателя, например, момент зажигания, момент впрыска топлива, поток РОГ и путь поступления всасываемого воздуха регулируют с обратной связью, то есть параметры работы двигателя изменяют в зависимости от результатов оценки одного или нескольких метеопараметров, параметров окружающей среды и/или текущих условий работы двигателя. Поэтому топливная экономичность и уровни выбросов транспортного средства могут зависеть от достоверности результатов оценки одного или нескольких метеопараметров, параметров окружающей среды и/или текущих условий работы двигателя. Более достоверные результаты оценки одного или нескольких метеопараметров, параметров окружающей среды и/или текущих условий работы двигателя, получаемые в по меньшей мере одном варианте осуществления настоящего изобретения, позволяют повысить топливную экономичность и сократить регулируемые выбросы.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящем описании способы и алгоритмы управления могут храниться в виде исполняемых команд в долговременной памяти. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя в системе управления двигателя.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
Реферат
Изобретение относится к двигателям внутреннего сгорания. В способе изменения параметров работы двигателя получают первый результат измерения метеопараметра от одного или нескольких датчиков двигателя и второй результат измерения этого метеопараметра из метеоданных. Затем определяют первую достоверность первого результата измерения и вторую достоверность второго результата измерения. Далее формируют результат оценки метеопараметра в зависимости от достоверностей первого и второго результатов измерения и изменяют параметр работы двигателя в зависимости от сформированного результата оценки. Повышается достоверность полученных метеоданных. 3 н. и 17 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Двигатель внутреннего сгорания поршневого типа с переменной степенью сжатия
Комментарии