Способ (варианты) и система управления системой охлаждения двигателя автомобиля - RU2709395C2
Код документа: RU2709395C2
Чертежи


















Описание
Область техники
Настоящая заявка относится к способам и системам для определения уровня жидкости в расширительном бачке хладагента (или баллоне дегазатора) и регулирования работы двигателя на основе расчетного уровня жидкости в вертикальной полой трубе, соединенной с возможностью гидравлического сообщения с расширительным бачком.
Уровень техники и сущность изобретения
Автомобили могут содержать системы охлаждения, выполненные с возможностью снижения перегрева двигателя путем передачи тепла в окружающий воздух. При этом, хладагент циркулирует в блоке двигателя для вывода тепла из двигателя и затем нагретый хладагент проходит через радиатор для рассеивания тепла. Система охлаждения может содержать различные компоненты, такие как, бачок хладагента, соединенный с системой дегазации и хранения хладагента. Бак с наддувом, который также служит для отделения захваченного воздуха от хладагента, обычно называют баллоном дегазатора. При повышении температуры хладагента в системе тепловое расширение хладагента приводит к повышению давления в баллоне дегазатора по мере сокращения объема запертого воздуха. Сброс давления обеспечивают путем выпуска воздуха из баллона дегазатора через клапан, который обычно устанавливают в заливном колпачке. Затем, при падении температуры и давления хладагента ниже атмосферного давления в баллоне дегазатора, существует возможность втягивания воздуха обратно в баллон через другой клапан, который часто устанавливают в заливном колпачке.
Если уровень хладагента в баллоне слишком низкий, объем воздуха будет слишком большим для создания достаточного давления, чтобы предупредить вскипание и кавитацию на впуске водяного насоса. При низких уровнях жидкости баллон дегазатора также больше не сможет отделять воздух от хладагента и воздух сможет попадать в систему охлаждения, что опять приведет к снижению эффективности охлаждения. Если вместо системы активной дегазации использовать сливную систему, подобное снижение степени эффективности системы охлаждения может возникнуть при низких уровнях жидкости.
Для оценки уровня жидкости в баке можно использовать разные подходы. Один такой примерный подход, описанный Мэрфи в патенте США №8583387, предполагает ультразвуковой датчик уровня жидкости, установленный на дне бака для определения уровня жидкости в баке. Однако авторы настоящего изобретения выявили, что в такой системе охлаждения размеры бачка хладагента могут изменяться в зависимости от температуры хладагента в бачке. В результате, существует вероятность возникновения несоответствий оценки предполагаемого уровня хладагента. Кроме того, в силу расположения датчика на дне бака при низких уровнях хладагента существует вероятность неточного определения того, что бак пуст или уровень жидкости в баке низкий. Далее, может быть затруднительно отличить фактические низкие уровни хладагента от неправильного определения уровня хладагента из-за ухудшения работы датчика. В другом подходе, описанном Гордоном и соавт. в патенте США 20130103284, датчик подсоединен к шлангу бачка хладагента. Одна из проблем такого подхода состоит в том, что датчик может обнаруживать наличие хладагента только в этом месте контура. Хладагент может не достигать критических компонентов силового привода, несмотря на наличие хладагента в одном из шлангов бачка хладагента, особенно если шланг изолирован от системы охлаждения клапаном (например, термостатический шланг двигателя). Далее, хотя показания низкого уровня хладагента и получены, контроль температуры двигателя может быть уже ухудшен из-за значительного опустошения бачка хладагента.
В одном из подходов вышеуказанные проблемы могут быть, по меньшей мере, частично решены посредством способа для системы хладагента, содержащего: корректировку оценки уровня жидкости в вертикальной полой трубке, соединенной с возможностью гидравлического сообщения с расширительным бачком хладагента, на основе движения автомобиля; и регулировку привода в ответ на оценку уровня жидкости. Таким образом, уровень жидкости в бачке хладагента может быть получен на основе уровня жидкости в вертикальной трубке, соединенной с возможностью гидравлического сообщения с бачком. Затем, ожидаемое колебание уровня хладагента может быть применено к измеренному уровню хладагента в вертикальной трубке на основе движения автомобиля, чтобы улучшить точность оценки уровня жидкости в бачке хладагента.
В качестве одного из примеров, система охлаждения двигателя может содержать вертикальную трубку, центрированную с расширительным бачком хладагента, при этом в трубке установлен ультразвуковой датчик. Вертикальная трубка может быть соединена с бачком хладагента посредством шланга, как сверху, так и снизу, при этом хладагент протекает между трубкой и бачком по шлангам. Шланги могут быть соединены таким образом, что между верхней точкой уровня жидкости в вертикальной трубке и верхней точкой трубки возникает свободное пространство. Кроме того, шланги могут быть соединены таким образом, что верхняя часть вертикальной трубки расположена ниже верхней части бачка хладагента, что позволяет датчику более точно определять уровень жидкости в бачке и отличать состояние низкого уровня от состояния отсутствия хладагента. Датчик, расположенный внутри углубления на дне вертикальной трубки, может передавать сигнал в верхнюю часть вертикальной трубки, при этом эхо-сигнал поступает в датчик после отражения от верхней части трубки. Передача сигнала может происходить периодически и на основе среднего значения времени эхо-сигнала (которое представляет собой время, прошедшее между переданным сигналом и эхо-сигналом полученного сигнала), при этом можно определить уровень хладагента в вертикальной трубке. Эту оценку можно затем использовать для определения уровня хладагента в бачке. Во время движения автомобиля, например, во время ускорения хода или замедления хода автомобиля, параметр движения автомобиля (например, поперечное и/или продольное ускорение) может быть определен и использован для определения ожидаемого изменения уровня жидкости в вертикальной трубке в связи с колебанием жидкости и передачей жидкости между бачком и трубкой через шланги. Таким образом, колебание жидкости может повлиять на верхнюю точку уровня жидкости в вертикальной трубке, изменяя время эхо-сигнала, используемое для оценки уровней жидкости. Ожидаемое изменение уровня жидкости в связи с колебанием жидкости может быть сравнено с действительным изменением уровня жидкости в связи с колебанием жидкости и может быть использовано для определения поправки, используемой для корректировки выходных данных датчика и точного получения уровня жидкости в бачке хладагента. Кроме того, диагностика датчика может быть выполнена на основе сравнения действительного колебания жидкости с ожидаемым колебанием жидкости.
Таким образом, можно повысить точность и надежность определения уровня хладагента в расширительном бачке хладагента. На основе определения уровня хладагента в бачке исходя из расчетного уровня хладагента в вертикальной трубке, может быть снижена неточность определения уровня хладагента, возникающая в силу искажения показаний датчика внутри бачка вследствие температурных колебаний. Путем компенсации изменений уровня жидкости в вертикальной трубке в связи с колебаниями жидкости, в соответствии с расчетом, основанным на параметрах движения автомобиля, таких как поперечное ускорение и продольное ускорение, погрешности в оценке уровня жидкости в связи с движением автомобиля могут быть уменьшены. Основываясь на ультразвуковом датчике и локальном процессоре для оценки уровня хладагента в вертикальной трубке на основе времени эхо-сигнала, может быть ускорена оценка уровня хладагента и может быть улучшена компенсация для колебаний уровня жидкости в связи с колебаниями хладагента. В целом, перегрев двигателя в связи с неточным расчетом уровня хладагента может быть уменьшен.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На ФИГ. 1 показана система двигателя, содержащая систему охлаждения двигателя.
На ФИГ. 2 показана блок-схема системы охлаждения двигателя.
На ФИГ. 3 показана часть примерной системы охлаждения, содержащей бачок хладагента, соединенный с возможностью гидравлического сообщения с вертикальной трубкой, при этом вертикальная трубка присоединена к раме автомобиля.
На ФИГ. 4 приведен альтернативный вид части системы охлаждения, проиллюстрированной на ФИГ. 3, с отличительными признаками жидкостного соединения и крепления вертикальной трубки.
На ФИГ. 5 приведен второй альтернативный вид части системы охлаждения, изображенной на ФИГ. 3.
На ФИГ. 6 приведен третий альтернативный вид части системы охлаждения, показанной на ФИГ. 3, с отличительными признаками крепления вертикальной трубки к раме автомобиля.
На ФИГ. 7 приведен четвертый альтернативный вид части системы охлаждения, показанной на ФИГ. 3, с выделением отличительных признаков ультразвукового датчика уровня в вертикальной трубке и крепления вертикальной трубки к раме автомобиля.
На ФИГ. 8 изображен колпачок, выполненный для установки сверху вертикальной трубки.
На ФИГ. 9 приведена блок-схема высокого уровня для определения уровня жидкости в бачке хладагента.
На ФИГ. 10 показан пример способа регулирования количества энергии, подаваемой на ультразвуковой датчик уровня в вертикальной трубке системы охлаждения.
На ФИГ. 11 показан примерный способ определения уровня жидкости в вертикальной трубке на основе информации ультразвукового датчика уровня.
На ФИГ. 12 показан примерный способ определения уровня жидкости в вертикальной трубке на основе значений времени эхо-сигнала и оценке состава жидкости.
На ФИГ. 13А-13С приведено расхождение между уровнями жидкости в вертикальной трубке и бачке хладагента, исходя из пространственного положения автомобиля.
На ФИГ. 14 показан примерный способ определения срока колебания и регулирования оценки уровня жидкости в вертикальной трубке на основе срока колебания.
На ФИГ. 15 показан примерный способ установления ухудшения работы ультразвукового датчика уровня на основе накопленных сроков колебаний.
На ФИГ. 16 показана примерная контрольная система для определения срока колебания и регулирования оценки уровня основного объема хладагента на основе срока колебания.
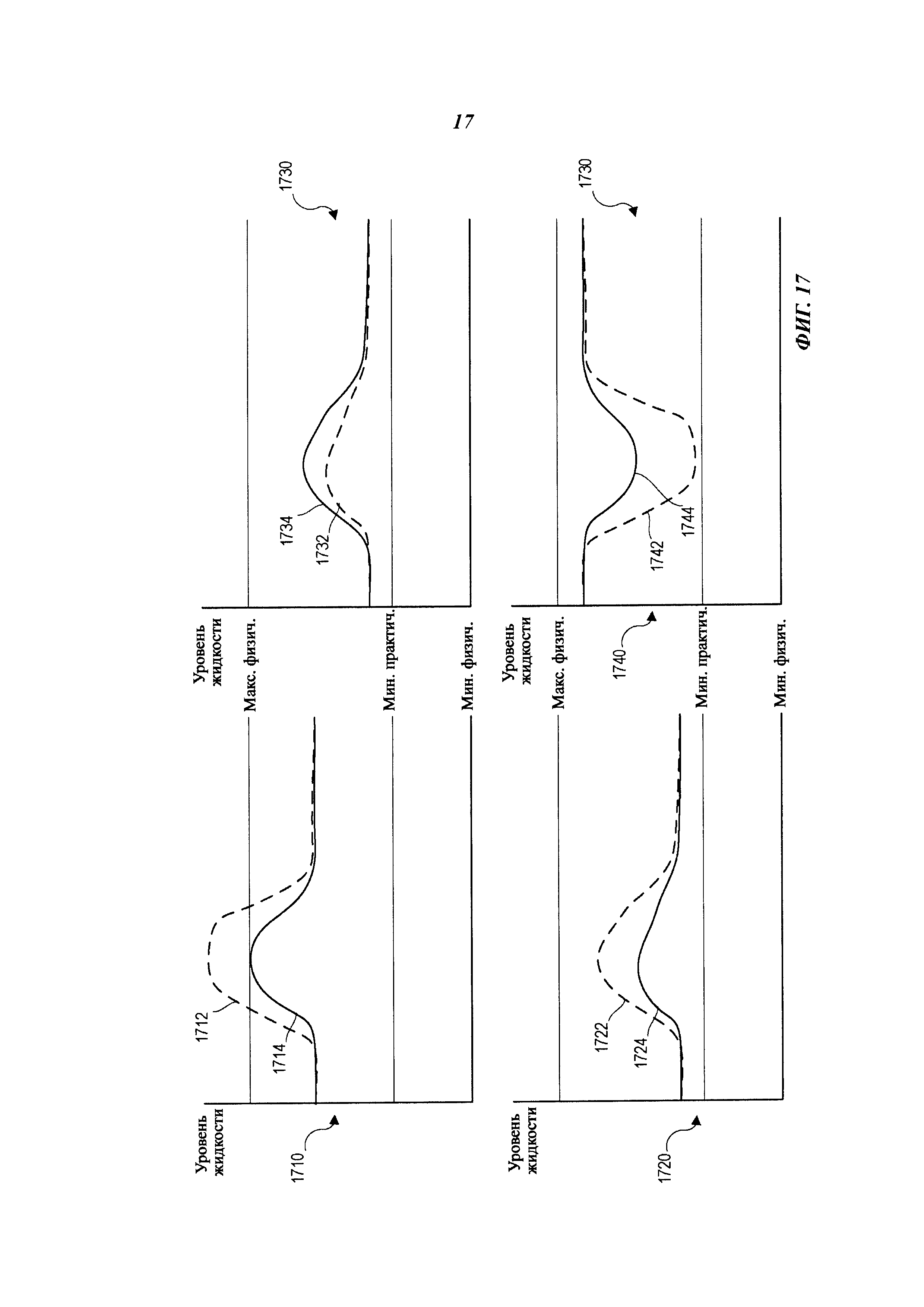
На ФИГ. 17 приведены четыре примера колебаний в пределах трубки в сравнении с прогнозируемыми объемами колебаний.
На ФИГ. 18 показан примерный способ определения уровня хладагента при сравнении прогнозируемого уровня основного объема хладагента с различными пороговыми значениями.
На ФИГ. 19 показано определение состояния хладагента на основе истории уровней хладагента и состояний хладагента.
Осуществление изобретения
Следующее раскрытие относится к системам и способам для управления двигателем автомобиля, при этом двигатель оснащен системой охлаждения, показанной на ФИГ. 1-2. Система охлаждения может содержать расширительный бачок хладагента, в настоящей заявке упоминаемый также как баллон дегазатора, соединенный с возможностью гидравлического сообщения с узкой вертикальной трубкой, изображенной на ФИГ. 3-8. Вертикальная трубка может содержать датчик уровня, передающий информацию в контроллер двигателя для определения количества хладагента в трубке, как показано на ФИГ. 9-12. Контроллер также может определять количество хладагента в баллоне дегазатора (далее упоминаемое как уровень основного объема хладагента) на основе количества хладагента в вертикальной трубке (далее упоминаемое как локальный уровень хладагента) и различные параметры движения, как показано на ФИГ. 13-17. На основе расчета уровня хладагента контроллер может указывать состояние хладагента, а на основе состояния хладагента на рабочие параметры двигателя могут быть наложены ограничения, как показано на ФИГ. 18-19. Таким образом, можно более точно определить уровни основного объема хладагента даже в случае колебаний. Кроме того, можно более надежно определять низкие уровни хладагента и рабочие параметры двигателя можно соответственно ограничивать для предупреждения перегрева двигателя.
На ФИГ. 1 приведено примерное осуществление системы 100 автомобиля, содержащей систему охлаждения 101 автомобиля в автомобиле 102. Автомобиль 102 имеет приводные колеса 106, пассажирский салон 104 (здесь также называемый пассажирской кабиной) и подкапотный отсек 103. Подкапотный отсек 103 может вмещать различные подкапотные компоненты (не показаны) автомобиля 102. Например, подкапотный отсек 103 может вмещать двигатель 10 внутреннего сгорания. Двигатель 10 внутреннего сгорания снабжен камерой сгорания, которая может впускать приточный воздух из впускного канала 44 и может выпускать отработавшие газы сгорания через выпускной канал 48. Двигатель 10, показанный и описанный в данном случае, может быть частью автомобиля, например дорожного автомобиля, и других типов автомобилей. Так как примерные варианты применения системы 10 двигателя будут описаны со ссылкой на автомобиль, следует учесть, что могут быть использованы разные типы двигателей и силовых установок автомобилей, в том числе пассажирские автомобили, грузовые автомобили и т.д.
Подкапотный отсек 103 может далее также содержать систему 101 охлаждения, обеспечивающую циркуляцию хладагента через двигатель 10 внутреннего сгорания для поглощения отработавшего тепла и направляющую нагретый хладагент в радиатор 80 и/или сердцевину 90 нагревателя через трубопроводы или (контуры) 82 и 84 хладагента, соответственно. В одном примере, как изображено, система 101 охлаждения, может быть выполнена с возможностью соединения с двигателем 10 и может проводить хладагент от двигателя 10 к радиатору 80 через водяной насос 86 с приводом от двигателя и обратно к двигателю 10 через трубопровод 82 хладагента. Водяной насос 86 с приводом от двигателя может быть соединен с двигателем через передний дополнительный привод 36 (ПДП), и может вращаться пропорционально частоте вращения двигателя через ремень, цепь и т.д. В частности, насос 86 с приводом от двигателя может пропускать хладагент через каналы в корпус, головку двигателя и т.д. для поглощения тепла двигателя, которое затем выводится во внешнюю среду через радиатор 80. В примере, где насос 86 представляет собой центробежный насос, производимое давление (и соответствующий поток) может быть увеличено пропорционально частоте вращения коленчатого вала, которая, в примере ФИГ. 1 может быть напрямую связана с частотой вращения двигателя.
В некоторых примерах насос 86 с приводом от двигателя может действовать для направления хладагента через оба трубопровода 82 и 84 хладагента.
Температуру хладагента можно регулировать термостатом 38. Термостат 38 может содержать термочувствительный элемент 238, расположенный на стыке трубопроводов 82, 85 и 84 охлаждения. Далее, термостат 38 может содержать клапан 240 термостата, расположенный в трубопроводе 82 охлаждения. Как далее более подробно показано на ФИГ. 2, клапан термостата остается закрытым, пока хладагент не достигнет пороговой температуры, ограничивая, таким образом, поток хладагента через радиатор, пока не будет достигнута пороговая температура.
Хладагент может протекать через трубопровод 84 хладагента в сердцевину 90 нагревателя, где возможна передача тепла в пассажирский салон 104. Затем, хладагент направляется обратно в двигатель 10 через клапан 122. В частности, сердцевина 90 нагревателя, которая выполнена в виде водовоздушного теплообменника, может обмениваться теплом с циркулирующим хладагентом и передавать тепло в пассажирский салон 104 автомобиля по запросу водителя на обогрев. Таким образом, сердцевина нагревателя может быть также соединена с системой ОВКВ автомобиля (система отопления вентиляции и кондиционирования воздуха), которая содержит другие компоненты, такие как, вентилятор нагревателя и кондиционер воздуха (не показан).
На основе запроса водителя на обогрев/охлаждение кабины система ОВКВ может нагреть воздух в кабине посредством нагретого хладагента в сердцевине нагревателя для повышения температуры в кабине и обогрева кабины. Система 101 охлаждения может содержать одну или более воздуходувок (не показаны) и охлаждающие вентиляторы как дополнение к воздушному потоку и для усиления охлаждающего потока среди подкапотных компонентов. Например, охлаждающий вентилятор 92, подсоединенный к радиатору 80, при активации обеспечивает содействие охлаждающему воздушному потоку через радиатор 80. Охлаждающий вентилятор 92 может втягивать охлаждающий воздушный поток в подкапотный отсек 103 через отверстие в передней части автомобиля 102, например, через систему 112 заслонок решетки радиатора. Такой охлаждающий воздушный поток может быть затем утилизирован радиатором 80, другими подкапотными компонентами (например, компонентами топливной системы, аккумуляторами и т.д.) для охлаждения двигателя и/или трансмиссии. Далее, воздушный поток можно использовать для отражения тепла от системы кондиционирования воздуха автомобиля. Также, воздушный поток можно использовать для повышения эффективности двигателя с наддувом/турбонаддувом, который оборудован промежуточными охладителями, которые снижают температуру воздуха, поступающего во впускной коллектор/двигатель. В одном примере, система 112 заслонок решетки радиатора может быть выполнена с множеством вентиляционных решеток (или ребер, лопаток или заслонок), причем контроллер может регулировать положение вентиляционных решеток для регулирования воздушного потока через систему заслонок решетки.
Охлаждающий вентилятор 92 может быть соединен и иметь привод от двигателя 10 через генератор переменного тока 72 и аккумулятор 74 системы. Охлаждающий вентилятор 92 может быть механически соединен с двигателем 10 дополнительной муфтой (не показана). Во время работы двигателя крутящий момент, создаваемый двигателем, может быть передан на генератор 72 посредством приводного вала (не показан). Созданный крутящий момент может быть использован генератором 72 для выработки электроэнергии, которую можно хранить в устройстве для хранения электроэнергии, например, аккумулятор 74 системы. Аккумулятор 74 можно затем использовать для задействования электродвигателя 94 охлаждающего вентилятора.
Автомобильная система 100 может далее содержать трансмиссию 40 для передачи энергии, вырабатываемой двигателем 10, на автомобильные колеса 106. Трансмиссия 40, содержащая различные шестерни и муфты, может быть выполнена с возможностью снижения высокой скорости вращения двигателя до низкой скорости вращения колеса, увеличивая при этом крутящий момент. Для обеспечения возможности регулирования температуры различных компонентов трансмиссии система 101 охлаждения также может быть соединена с возможностью связи с системой 45 охлаждения трансмиссии. Система 45 охлаждения трансмиссии содержит маслоохладитель 125 трансмиссии (или водомасляный теплообменник трансмиссии), расположенный внутри или выполненный в составе с трансмиссией 40, например, в поддоне трансмиссии ниже и/или в стороне от вращающихся элементов трансмиссии. Маслоохладитель 125 трансмиссии может иметь множество пластин или ребер с целью максимальной передачи тепла. Хладагент из трубопровода 84 хладагента может иметь сообщение с маслоохладителем 125 трансмиссии по трубке 46. Для сравнения, хладагент из трубопровода 82 хладагента и радиатора 80 может иметь сообщение с маслоохладителем 125 трансмиссии по трубке 48.
ФИГ. 1 далее иллюстрирует систему 14 управления. Система 14 управления может быть соединена с возможностью связи с разными компонентами двигателя 10 для осуществления управляющих алгоритмов и действий, раскрытых в настоящей заявке. Например, как показано на ФИГ.1, система 14 управления может содержать электронный цифровой контроллер 12. Контроллер 12 может быть выполнен в качестве микрокомпьютера, содержащего микропроцессорное устройство, порты ввода/вывода, электронную среду хранения выполняемых программ и калибровочных значений, оперативное запоминающее устройство, энергонезависимое запоминающее устройство и шину данных. Как показано, контроллер 12 может получать информацию от множества датчиков 16, которые могут быть устройствами ввода информации пользователем и/или датчиками (например, данных о положении зубчатого колеса, информации о педали газа, информацию о тормозе, положении переключателя коробки передач, скорости автомобиля, частоте вращения двигателя, массовом расходе воздуха в двигателе, внешней температуре, температуре воздуха на входе, и т.д.), датчиками системы охлаждения (например, данных о температуре хладагента, уровне хладагента, температуры монтажной платы датчика хладагента, температуры нагрева цилиндра, скорости вращения вентилятора, температуры пассажирского салона, влажности внешней среды, выхода термостата, и т.д.), и др. Далее, контроллер 12 может иметь связь с разными исполнительными механизмами 18, к которым могут относиться исполнительные механизмы двигателя (например, топливные форсунки, дроссельная заслонка приточного воздуха с электронным управлением, свечи зажигания и т.д.), исполнительные механизмы системы охлаждения (например, различные клапаны системы охлаждения) и др. В некоторых примерах запоминающее устройство может быть запрограммировано с помощью машиночитаемых данных, представляющих собой инструкции, выполняемые процессором 102 для осуществления способов, раскрытых ниже, а также других вариантов, предусмотренных, но конкретно не перечисленных.
Если обратиться к ФИГ. 2, то на ней приведено примерное осуществление 200 системы охлаждения с ФИГ. 1 с различными клапанами, контурами и теплообменниками.
Хладагент может поступать в термостат 38 из разных контуров. Таким образом, термостат 38 выполнен с термочувствительным элементом 238 для определения температуры хладагента, циркулирующего в термостате, тогда как клапан 240 термостата, соединенный с возможностью связи с температурным датчиком, выполнен с возможностью открытия только, если температура превышает пороговое значение. В одном примере, клапан 240 термостата может представлять собой клапан с механическим приводом, например, восковая заглушка для усилия/смещения срабатывания, с возможностью открытия, когда температура хладагента, определенная термочувствительным элементом (воском), превышает пороговую температуру.
Хладагент может циркулировать по первому обходному контуру 220 из двигателя 10 в термостат 38. Отсюда, насос 86 может перекачивать хладагент обратно в двигатель. Хладагент также может циркулировать по второму обходному контуру 222 из двигателя 10 через сердцевину 90 нагревателя и маслоохладитель 225 двигателя в термостат 38. Отсюда, насос 86 может перекачивать хладагент обратно в двигатель. Хладагент также может циркулировать из двигателя 10 через радиатор 80, через третий контур 224 в термостат 38 на основе состояния клапана 240 термостата. В частности, когда клапан 240 термостата открыт, хладагент может циркулировать через радиатор 80 и затем через клапан 240 термостата. Поток хладагента через радиатор может позволить рассеять тепло циркулирующего горячего хладагента в окружающий воздух посредством вентилятора радиатора. После прохождения через клапан термостата хладагент может быть перекачан насосом 86 обратно в двигатель. Хладагент может циркулировать в четвертом охлаждающем контуре 226 из радиатора 80 и водовыпуска 204 через трансмиссионный маслоохладитель 125 и затем в маслоохладитель 225 двигателя.
Хладагент может циркулировать из водовыпуска 204 и радиатора 80 в баллон 208 дегазатора, который может служить в качестве бачка хладагента в системе 200 охлаждения. Баллон 208 дегазатора может быть соединен с возможностью гидравлического сообщения с вертикально-ориентированной трубкой 210 посредством шланга 214 датчика верхнего уровня и шланга 216 датчика нижнего уровня, как это более подробно описано на ФИГ. 3-7. Шланг датчика верхнего уровня может соединять верхнюю часть баллона 208 дегазатора с верхней частью вертикальной трубки 210 и может быть выполнен таким образом, чтобы обеспечивать циркуляцию воздуха между этими двумя устройствами. Шланг 216 датчика нижнего уровня может быть подсоединен к баллону 208 дегазатора посредством выпускного шланга 216 баллона дегазатора и может быть выполнен таким образом, чтобы обеспечить циркуляцию хладагента между баллоном 208 дегазатора и вертикальной трубкой 210. Вертикальная трубка 210 может содержать пьезоэлектрический датчик 212 уровня хладагента с электронным подсоединением к контроллеру 12.
При нагреве жидкости в системе охлаждения происходит расширение жидкости, что приводит к повышению давления. В системах охлаждения с расширительными бачками колпачок радиатора можно располагать только там, где это давление может быть сброшено. По сути, регулировка пружины на колпачке радиатора определяет максимальное давление в системе охлаждения. Когда давление достигает, например, 15 фунт/кв. дюйм, давление открывает клапан колпачка радиатора и выпускает находящийся под давлением хладагент из системы охлаждения. Такой хладагент проходит по переливной трубке радиатора в расширительный баллон. Таким образом, такое устройство выводит воздух из системы хладагента. Когда радиатор охлажден, в системе охлаждения возникает вакуум, который открывает пружинный клапан и втягивает хладагент обратно со дна расширительного бачка в радиатор.
Если сливные системы контролируют давление путем перепуска хладагента через клапан, активные системы дегазации контролируют давление, пропуская через клапан воздух. В системах дегазации термальное расширение хладагента вынуждает жидкость течь в баллон дегазатора, повышая таким образом давление воздуха в баллоне дегазатора. Когда давление воздуха в баллоне дегазатора превышает верхнее пороговое давление, например, 21 фунт/кв. дюйм, давление открывает клапан и воздух выходит. В одном примере данный клапан может быть расположен в заливном колпачке резервуара (например, колпачке 304 баллона дегазатора с ФИГ. 3). Если воздух из системы выпущен, в следующий раз, когда охлаждение системы достигнет температуры окружающего воздуха, давление в баллоне дегазатора будет ниже атмосферного давления. При таком состоянии произойдет открытие другого клапана, расположенного в заливном колпачке, чтобы впустить окружающий воздух в баллон дегазатора. Баллон дегазатора назван так, потому что он отделяет воздух, захваченный хладагентом. Часть хладагента из разных локальных высоких точек системы охлаждения пропускают через продувочные патрубки обратно в баллон дегазатора.
Система 200 охлаждения может также содержать турбонагнетатель 206. Хладагент может циркулировать из водовыпуска 204 через турбонагнетатель 206 и в выпускной шланг 219 баллона дегазатора через турбовыпускной шланг 218. Турбовыпускной шланг 218 может быть подсоединен к выпускному шлангу 219 баллона дегазатора ниже по потоку от соединения между шлангом 216 датчика нижнего уровня и выпускным шлангом 219 баллона дегазатора. Таким образом, высокотемпературный хладагент и/или пар в турбовыпускном шланге 218 не должен воздействовать на жидкостную передачу между баллоном 208 дегазатора и вертикальной трубкой 210.
К системе охлаждения может быть присоединен один или более температурных датчиков на выходе горячей воды из двигателя для определения температуры хладагента. Например, температуру хладагента можно определить по датчику температуры хладагента двигателя (ТХД), расположенного в контакте с нагретым хладагентом. Альтернативно, температуру хладагента можно определить по датчику температуры головки цилиндра (ТГЦ), расположенному на блоке двигателя, например, в нескольких миллиметрах алюминия от хладагента двигателя, протекающего в головку цилиндра. Температуру хладагента можно также определить в пределах вертикальной трубки 210, а температуру печатной платы можно определить в пределах печатной платы датчика 212 уровня хладагента, далее описанного со ссылкой на ФИГ. 7.
Как здесь подробно объясняется, вертикальная трубка может быть соединена с возможностью гидравлического сообщения с расширительным бачком хладагента, чтобы уровень хладагента в бачке был уравновешен с уровнем хладагента в вертикальной трубке. Следовательно, контроллер может быть выполнен так, чтобы определять уровень хладагента в баллоне дегазатора на основе уровня хладагента в вертикальной трубке. Это обеспечивает точное определение уровня хладагента, не касаясь проблем, связанных с использованием датчика уровня в баллоне дегазатора. Далее, уровень хладагента в вертикальной трубке можно использовать для регулирования работы двигателя, чтобы снизить перегрев двигателя, возникающий из-за низких уровней хладагента в баллоне дегазатора.
На ФИГ. 3 приведен один вид позиционирования вертикальной трубки относительно баллона дегазатора и рамы автомобиля. Вертикальная трубка, обозначенная как 310, прикреплена к раме 302 посредством нескольких компонентов опоры 320 вертикальной трубки, в соответствии с подробным описанием со ссылкой на ФИГ. 4, 5, 6 и 7. Вертикальная трубка 310 может быть далее прикреплена к раме 302 посредством нижних опор 321а и 321b. Расположение вертикальной трубки 310 в пределах подкапотного пространства основано на нескольких критериях, предполагает, но не ограничиваясь этим, обеспечение пространства для направления шланга 314 датчика верхнего уровня и шланга 316 датчика нижнего уровня между вертикальной трубкой 310 и баллоном 308 дегазатора и крепление вертикальной трубки к прочной и жесткой опоре во избежание вредных вибраций. Кроме того, расстояние между вертикальной трубкой и баллоном дегазатора минимизировано с целью снижения воздействия ускорения автомобиля и высоты на разницу между уровнем жидкости в вертикальной трубке и уровнем жидкости в баллоне дегазатора. В данном предпочитаемом примере осуществления вертикальная трубка должна быть отцентрирована с боковой центральной линией баллона дегазатора, минимизируя, таким образом, влияние поперечного ускорения и боковых наклонных положений автомобиля на разницу уровней жидкости между вертикальной трубкой и баллоном дегазатора. Как показано на ФИГ. 3, поперечное направление внутри и снаружи страницы. Более того, продольное расстояние (слева направо на ФИГ. 3) между баллоном дегазатора и вертикальной трубкой может быть таковым, что продольное ускорение и высота вверх/вниз по спуску обеспечивают колебания уровня жидкости в вертикальной трубке, предоставляя возможность подтвердить непрерывную функцию датчика.
Крепежные кронштейны вертикальной трубки 320 и 321 могут быть определены как часть стенки 382 вертикальной трубки. Альтернативно, вертикальная трубка может быть прикреплена к стенке 382 вертикальной трубки посредством одного или более болтов, сваркой и т.д. Вертикальную трубку 310 крепят таким образом, чтобы ее главная ось была отцентрирована с силой гравитации при нахождении автомобиля в состоянии покоя на ровной поверхности. Вертикальная трубка 310 и баллон 308 дегазатора имеют относительно неподвижное положение. Ориентация вертикальной трубки 310 выполнена так, чтобы главная ось вертикальной трубки проходила параллельно вертикальной оси баллона дегазатора. То есть, вертикальная трубка 310 и баллон 308 дегазатора могут быть выполнены так, чтобы иметь общую плоскую поверхность на уровне их верхних поверхностей. Однако нижнюю поверхность вертикальной трубки можно расположить ниже нижней поверхности баллона дегазатора. Такая конкретная конфигурация может обеспечить наличие в вертикальной трубке минимального порогового уровня хладагента, даже когда уровень хладагента в баллоне дегазатора близок к пустому. Такую конфигурацию можно использовать в силу того, что ультразвуковые датчики не могут проводить измерения ниже минимального уровня. Если датчик расположен так, что его минимальный уровень ниже выходного патрубка баллона дегазатора, то любой хладагент в баллоне дегазатора будет находиться в диапазоне измерений датчика. Таким образом, снижен риск работы баллона дегазатора пустым и перегрева двигателя. Таким образом, уровень хладагента может быть определен по общей горизонтальной плоскости, пересекающей как баллон 308 дегазатора, так и вертикальную трубку 310, когда автомобиль находится на ровной поверхности (как далее описано со ссылкой на ФИГ. 4).
Вертикальная трубка 310 может содержать колпачок 312 трубки, ультразвуковой датчик уровня для измерения уровня хладагента (не показан), и корпус 360 датчика. Вертикальная трубка 310 соединена с возможностью гидравлического сообщения с баллоном 308 дегазатора посредством шланга 314 датчика верхнего уровня и шланга 316 датчика нижнего уровня. В частности, шланг 314 датчика верхнего уровня расположен так, чтобы пропускать поток воздуха между верхом вертикальной трубки 310 и верхом баллона 308 дегазатора, а шланг 316 нижнего датчика уровня расположен так, чтобы пропускать хладагент между нижней частью вертикальной трубки 310 и нижней частью баллона 308 дегазатора. Таким образом, уровень жидкости между вертикальной трубкой 310 и баллоном 308 дегазатора может достигнуть уровня равновесия, когда автомобиль находится в состоянии покоя, что облегчает сравнение уровня хладагента внутри вертикальной трубки и уровня хладагента в баллоне дегазатора.
Баллон 308 дегазатора содержит колпачок 304 баллона дегазатора, впускной шланг 306 дегазатора и выпускной шланг 319 дегазатора дополнительно к шлангу 314 датчика верхнего уровня. Баллон 308 дегазатора может содержать верхнюю часть 311 и нижнюю часть 313. В альтернативных примерах осуществления баллон 308 дегазатора может содержать цельную часть или более двух частей. Баллон 308 дегазатора может быть прикреплен к любой соответствующей высокой и жесткой конструкции таким образом, чтобы баллон 308 дегазатора находился в основном на одном уровне. Под одним уровнем понимается нахождение на высоте, на которой верхняя поверхность простирается вдоль плоскости, в основном перпендикулярной направлению тяжести, например, в пределах 5 градусов перпендикуляра вдоль каждой оси продления. В качестве одного примера, баллон 308 дегазатора может быть прикреплен к внутреннему крылу посредством крепежного кронштейна 309 баллона дегазатора. В одном примере, крепежный кронштейн 309 баллона дегазатора может быть определен как часть нижней части 313 баллона дегазатора. В другом примере, крепежный кронштейн 309 баллона дегазатора может быть прикреплен к нижней части 313 баллона дегазатора посредством крепежной детали. В других примерах, крепежный кронштейн 309 баллона дегазатора может быть прикреплен или интегрирован как часть верхней части 311 баллона дегазатора. При креплении к баллону 308 дегазатора колпачок 304 баллона дегазатора может предупреждать испарение хладагента и его улетучивание в атмосферу из бачка хладагента. Когда колпачок 304 баллона дегазатора снят с баллона 308 дегазатора, может открыться отверстие в верху баллона 308 дегазатора для подачи дополнительного количества хладагента в систему. Хладагент можно вводить в баллон 308 дегазатора из других компонентов системы охлаждения посредством впускного шланга 306 баллона дегазатора. Например, впускной шланг может направить хладагент в баллон дегазатора из радиатора. В некоторых примерах, колпачок 304 баллона дегазатора может содержать клапан, например, предохранительный клапан или пружинный клапан. При нагреве жидкости в радиаторе, например, в результате излишнего нагрева двигателя, происходит расширение хладагента, что приводит к повышению давления в системе охлаждения. Давление в системе охлаждения может быть сброшено заливным колпачком 304 баллона дегазатора. В частности, максимальное давление в баллоне дегазатора можно определить посредством пружинного клапана в заливном колпачке 304 баллона дегазатора. При достижении давлением порогового значения, например 21 фунт/кв. дюйм, давление открывает клапан в заливном колпачке 304 баллона дегазатора и воздух под давлением выходит из баллона дегазатора в подкапотное пространство. Когда система остывает, возникает вакуум, который втягивает воздух обратно из подкапотного пространства через другой клапан в заливном колпачке 304 баллона дегазатора.
На ФИГ. 4 приведен альтернативный вид части системы охлаждения и другие детали жидкостного подключения баллона 308 дегазатора и вертикальной трубки 310. Датчик 340 может быть прикреплен к днищу баллона 308 дегазатора для измерения уровней жидкости непосредственно в баллоне дегазатора. Датчик 340 может быть расположен внутри корпуса 342 датчика. Датчик 340 может быть соединен с электронной контрольной системой и обеспечен связью с контроллером 12 посредством локальной сети контроллера (не показана).
Шланг 316 датчика нижнего уровня подсоединен к выпускному шлангу 319 баллона дегазатора посредством тройника 332. Тройник 332 ориентирован таким образом, чтобы 90-градусное ответвление выпускного шланга 319 было обращено вниз так, чтобы захваченные пузырьки а шланге 319 обходили шланг 316. Далее, когда хладагент отсутствует в баллоне 308 дегазатора и выпускном шланге 319 баллона дегазатора, определенный объем может оставаться «захваченным» в шланге 314 датчика нижнего уровня и в вертикальной трубке 310. Этот захваченный объем хладагента можно измерить ультразвуковым датчиком уровня 362. Дополнительно, можно сделать соединение между турбовыпускным шлангом (218 на ФИГ. 2) и выпускным шлангом 319 баллона дегазатора ниже по потоку от тройника 332 (заслонен на ФИГ. 4 вертикальной трубкой 310). Такое соединение может быть выполнено посредством второго тройника 334, ориентированного таким образом, чтобы 90-градусное ответвление от выпускного шланга 319 баллона дегазатора шло вверх, антипараллельно ответвлению тройника 332. Таким образом, горячий и/или испаренный хладагент, образованный обратным потоком из турбовыпускного шланга 218 (изменение обратного потока как функция скорости вращения двигателя), может не воздействовать на разницу в уровне хладагента между баллоном 308 дегазатора и вертикальной трубкой 310. Шланг 316 датчика нижнего уровня может быть далее подсоединен к боковой стороне вертикальной трубки 310 на уровне ниже запорного расстояния, связанного с ультразвуковым датчиком 362 уровня (как далее обсуждается со ссылкой на ФИГ. 7 и 11).
Вертикальная трубка 310 расположена так, что дно трубки 310 расположено ниже дна баллона 308 дегазатора и ниже тройника 332. В результате, если уровень хладагента в баллоне 308 дегазатора приближается к дну баллона или падает ниже дна баллона, соответствующий локальный уровень хладагента в трубке 310 может оставаться на заданном уровне, значительно выше ультразвукового датчика уровня (УДУ) 362. Заданный уровень может быть основан на уровне горизонтальной плоскости, простирающейся от верхней части тройника 332. Таким образом, если локальный уровень хладагента в вертикальной трубке оценивают как нулевой, можно определить ухудшение системы хладагента, как например, отсоединенный шланг, а если локальный уровень хладагента в вертикальной трубке оценен в пределах порогового расстояния заданного уровня, можно определить пустой баллон дегазатора.
Как показано на ФИГ. 4, вертикальная трубка 310 прикреплена к раме 302 таким образом, что верхняя часть вертикальной трубки занимает ту же горизонтальную плоскость, что и баллон 308 дегазатора. Вертикальная трубка 310 более высокая, чем баллон 308 дегазатора и, следовательно, дно вертикальной трубки 310 расположено ниже дна баллона 308 дегазатора. По существу, когда баллон 308 дегазатора пустой, определенный уровень хладагента может присутствовать в вертикальной трубке 310, образуя промежуточную поверхность, от которой могут отражаться ультразвуковые импульсы УДУ 362. При жидкостном равновесии локальный уровень хладагента в вертикальной трубке 310, который соответствует пустому баллону дегазатора, можно определить по горизонтальной плоскости, проходящей по верху тройника 332, как показано линией 333 уровня хладагента на ФИГ. 4. Таким образом, измерение заданного уровня в вертикальной трубке 310 можно ассоциировать с пустым уровнем основного объема хладагента в баллоне 308 дегазатора, что позволяет дифференцировать измерение пустого уровня основного объема хладагента от состояния типа отсоединенного шланга, которое может привести к пустому локальному уровню хладагента в вертикальной трубке 310.
Вертикальная трубка 310 может быть оборудована колпачком 312 вертикальной трубки. Колпачок 312 вертикальной трубки может быть выполнен для вставки в верхнюю часть вертикальной трубки 310, так чтобы главная ось колпачка 312 вертикальной трубки проходила параллельно вертикальной оси вертикальной трубки 312. Колпачок 312 вертикальной трубки может иметь гладкую поверхность 380, которая может помочь отражать звуковые волны, излучаемые ультразвуковым датчиком 362 уровня. В одном примере, колпачок 312 вертикальной трубки может быть изготовлен способом сварки трением. Вертикальная трубка 310 может представлять собой цилиндрическую гильзу с достаточно небольшим горизонтальным поперечным сечением, чтобы служить волноводом для ультразвуковых волн. В качестве неограничивающего примера горизонтальное поперечное сечение вертикальной трубки 310 может составлять примерно 17,25 мм в диаметре и быть слегка больше сенсорного элемента ультразвукового датчика уровня. Стенка 382 вертикальной трубки может быть выполнена из гладкого жесткого пластика, например, материала РА66 с 30% стеклонаполнением.
Ультразвуковой датчик уровня (УДУ) 362 может представлять собой пьезоэлектрический элемент преобразователя, способный как посылать, так и принимать ультразвуковые импульсные сигналы. УДУ 362 может быть жестко прикреплен к дну вертикальной трубки 310 в пределах корпуса 360 датчика и выполнен для излучения звуковых импульсов вверх по полости трубки. УДУ 362 может быть электронно соединен с печатной платой 364 УДУ. Печатная плата 364 УДУ может физически уходить за границы УДУ362 и может быть электронно связана с контроллером двигателя (например, 12 на ФИГ. 1-2). В неограничивающем примере датчик 340 может также представлять собой ультразвуковой датчик уровня, выполненный для непосредственного определения уровня хладагента в баллоне 308 дегазатора. Корпус 360 датчика может быть герметически соединен с верхней стенкой 382 вертикальной трубки посредством уплотнительного кольца и зафиксирован металлическим пружинным хомутиком 336 для осуществления быстрой сборки двух половинок стенки трубки. Корпус 360 датчика может быть выполнен из материала с коэффициентом термального расширения близкого к УДУ 362 по сравнению с коэффициентом верхней трубки 382, например, из PPS GF30. Нижняя крышка 368 трубки может быть присоединена к дну корпуса 360 датчика для защиты компонентов датчика от воздействия окружающей среды. Полость, окружающая плату 364 и УДУ 362, может быть наполнена эластичным герметиком для дальнейшей изоляции от окружающей среды.
При дальнейшем рассмотрении ФИГ. 5, на ней представлен вид с высоты птичьего полета относительного расположения баллона 308 дегазатора, вертикальной трубки 310 и рамы 302. Опорный кронштейн баллона дегазатора, изображенный здесь прикрепленным к нижней части 313 баллона дегазатора, может иметь отверстие с несколькими зубцами для обеспечения достаточного соответствия для сборки с сохранением неподвижной посадки после сборки. Шланг 314 датчика верхнего уровня изображен горизонтально проходящим между верхней частью 311 баллона дегазатора и верхней частью вертикальной трубки 310.
Как показано, вертикальная трубка 310 может содержать верхнюю крепежную опору 320, горизонтально выступающую над рамой 302 и одну или более нижних крепежных опор (не показаны), горизонтально выступающих ниже рамы 302, тогда как вертикальная трубка прикреплена вдоль вертикальной стороны рамы 302. Монтажный крепеж 322 трубки проходит, как показано, вертикально от верхней крепежной опоры 320 и через раму 302, ограничивая перемещение вертикальной трубки 310. Монтажный крепеж 322 трубки может проходить через металлический ограничитель нагрузки 324 выше рамы 302, что позволяет избежать снижение нагрузки аварийного хомута, которое может произойти с течением времени из-за набегания в верхней крепежной опоре 320. Пружинный фиксатор 336, расположенный в верхней части вертикальной трубки 310, может быть выполнен для обеспечения надежного крепления и быстрой сборки двух половинок вертикальной трубки 310. Как показано, нижняя крышка 368 трубки прикреплена к днищу вертикальной трубки 310 и может защищать УДУ 362 и плату 364 УДУ от воздействий окружающей среды. Как здесь описано, шланг 316 датчика нижнего уровня соединен с вертикальной трубкой 310 ниже пружинного фиксатора 336 и выше нижней крышки 368 вертикальной трубки.
Теперь обратимся к ФИГ. 6, на которой более подробно описано крепление вертикальной трубки 310 к раме 302. Рама 302 содержит несколько крестообразных опорных конструкций 303 между верхней поверхностью и нижней поверхностью рамы. В полости одной из крестообразных опорных конструкций 303 можно вставить монтажный клин 326, чтобы помочь прикрепить вертикальную трубку 310 к раме 302. Монтажный клин 326 может быть сконструирован для установки во внутренней решетке крестообразной опорной конструкции. Например, там где внутренняя решетка имеет в основном треугольную форму, монтажный клин также может быть выполнен в виде соответствующей треугольной формы с целью достижения точной подгонки. Верх монтажного клина 326 может входить в непосредственный контакт с низом - верхней поверхности рамы 302. Монтажный крепеж 322 трубки может вертикально выступать над рамой 302 через металлический ограничитель нагрузки 324, крепежную опору 320 трубки, через полость в раме 302 и через полость в монтажном клине 326. Монтажный крепеж 322 трубки может быть соединен с монтажным клином 368 посредством J-образного зажима 328. Таким образом, путем соединения монтажной опоры 320 трубки к монтажному клину 326, расположенному в крестообразной опорной конструкции 303 может быть улучшена стабильность положения вертикальной трубки 310 относительно рамы 302.
Как показано, вертикальная трубка 310 может выступать значительно ниже секции рамы 302, к которой она прикреплена. Корпус 360 датчика может проходить горизонтально под рамой 302 от вертикальной трубки 310. Корпус 360 датчика может содержать полость для приема шланга 316 датчика нижнего уровня и может содержать электрическое подсоединение к контроллеру 12.
На ФИГ. 7 приведен вид поперечного сечения вертикальной трубки 310, конфигурация УДУ 362 и корпуса 360 датчика и конфигурация верхней монтажной конструкции, содержащей монтажную опору 320 и монтажный крепеж 322. Вертикальная рубка 310 выполнена с возможностью подсоединения к шлангу 314 датчика верхнего уровня вдоль стенки 382 трубки рядом с колпачком 312 трубки. Вертикальная рубка 310 далее выполнена с возможностью подсоединения к шлангу 316 датчика нижнего уровня как раз над платой 364 УДУ.
Монтажная опора 320 может быть частью стенки 382 вертикальной трубки, как показано. Монтажный крепеж 322 можно ориентировать перпендикулярно нижней поверхности монтажной опоры 320 и верхней поверхности монтажного клина 326. Монтажный крепеж 322 может представлять собой соответствующий крепежный механизм, например, болт или винт.
Если рассмотреть нижнюю секцию вертикальной трубки 310, то плата 364 УДУ показана электрически соединенной с УДУ 262, датчиком 367 температуры хладагента (показан на ФИГ. 4) и датчиком 369 температуры печатной платы. Датчик 367 температуры хладагента может быть расположен на платой 364 УДУ, а датчик 369 температуры платы УДУ может быть расположен ниже платы 364 УДУ. Температурные датчики 367 и 369 могут быть выполнены с целью периодического или постоянного измерения температур хладагента в пределах вертикальной трубки 310 и платы 364 УДУ, соответственно. В одном примере, датчик 369 температуры платы УДУ может представлять собой установленный на поверхности термистор, прикрепленный к поверхности платы 364 УДУ.
Ультразвуковой датчик 362 уровня выполнен с возможностью периодического испускания звуковых волн для создания применимых данных датчика. В некоторых вариантах осуществления УДУ 362 может быть выполнен с возможностью генерирования серии нескольких ультразвуковых импульсов (например, пяти импульсов) с достаточным интервалом рассредоточения, чтобы импульсы имели достаточно времени пройти вертикальную трубку по ее длине и вернуться к датчику (на основе длины и скорости звука в жидкости) перед очередным генерируемым импульсом (например, 5-8 миллисекунд между импульсами) и генерирования серии периодически каждое общее время тол/сек (например, каждые 100 миллисекунд). УДУ 362 может генерировать эти звуковые сигналы постоянно во время состояний, когда состояние зажигания находиться в режиме работающего двигателя. УДУ 362 представляет собой приемо-передающее устройство и соответственно выполнен с возможностью приема звуковых волн. Когда УДУ 362 установлен в вертикальной трубке 310 и в трубке присутствует жидкость, импульсы, генерируемые УДУ 362, будут отражены поверхностью раздела жидкость-воздух или колпачком 312 вертикальной трубки и вернутся обратно к УДУ 362. Если энергия возвратного импульса выше нижней пороговой энергии, возвратный импульс передаст часть своей энергии и может быть принят УДУ 362. Термин «эхо-сигнал первого порядка» может быть в данном случае использован также в отношении данного возвратного импульса. Далее, термин «эхо-сигнал» можно применять и к данному возвратному импульсу, если не оговорено иное. В некоторых датчиках возвратные импульсы будут отражаться от дна жидкостной полости и проходить до поверхности раздела жидкость-воздух и отражаться во второй раз. Такие волны затем пройдут обратно к УДУ 362. Этот второе волновое отражение, которое в данном случае также называют эхо-сигнал второго порядка, также может быть обнаружено и использовано для верификации сигнала и более сложной операции.
Плата 364 ультразвукового датчика уровня может содержать память с инструкциями для регулирования энергии, подаваемой на УДУ 362 на основе энергии, ассоциируемой с ультразвуковыми импульсными сигналами, получаемыми УДУ 362. Например, как описано более подробно со ссылкой на ФИГ. 10, когда энергия, ассоциируемая с группой ультразвуковых импульсных сигналов, выше верхнего порогового значения или когда количество эхо-сигналов второго порядка, ассоциируемых с серией импульсов, больше порогового количества, то плату 364 УДУ можно контролировать (например, контроллером 12 двигателя с ФИГ. 1) для снижения энергии, подаваемой на УДУ 362 для излучения ультразвуковых импульсов. В качестве другого примера, когда энергия, ассоциируемая с группой ультразвуковых импульсных сигналов, меньше нижнего порогового значения, то плату 364 УДУ можно контролировать (например, контроллером 12 двигателя с ФИГ. 1) для увеличения энергии, подаваемой на УДУ 362 для излучения ультразвуковых импульсов. При энергии импульса ниже нижнего порогового значения, ультразвуковой импульс можно не обнаружить, хотя он и должен быть. Плата 364 УДУ выполнена с возможностью измерения времени и может содержать в памяти программы, выполненные для фиксирования временных меток ультразвуковых импульсов, получаемых УДУ 362. Плата 364 УДУ далее выполнена для определения температур узла и жидкости посредством температурных датчиков 367 и 369, соответственно (например, посредством измерений напряжений термистора от датчиков 367 и 369). Таким образом, плата 364 УДУ может генерировать улучшенные оценки уровня хладагента в трубке на основе времени ультразвуковых импульсов и температурных данных. Плата 364 УДУ может быть выполнена с возможностью передачи данных на контроллер 12 по CAN-шине, предполагая но не ограничиваясь этим, оценку температур от датчиков 367 и 369, ультразвуковые импульсные временные метки, уровни энергии ультразвуковых импульсов, и оценки уровней хладагента в трубке, обработанные датчиками, (как далее описано со ссылкой на ФИГ. 11).
УДУ 362 может быть также выполнен с возможностью передачи информации на контроллер двигателя (например, контроллер 12 с ФИГ. 1) по локальной сети контроллеров, как показано. В одном примере, УДУ 362 может быть однонаправленным или только трансляционным устройством в локальной сети контроллеров.
На ФИГ. 8 приведен подробный вид колпачка 312 трубки. Колпачок 312 вертикальной трубки может быть изготовлен сваркой трением. Колпачок 312 вертикальной трубки может быть цилиндрическим и содержать кольцевую канавку 384 для приема и опоры на верху стенки 382 вертикальной трубки. Поверхность 380 колпачка трубки может находиться в пределах участка, охваченного кольцевой канавкой 384. Поверхность 380 колпачка трубки может быть сконструирована ровной плоской и параллельной излучающей поверхности УДУ 362. Таим образом поверхность 380 колпачка трубки может эффективно отражать звуковые волны, которые излучает УДУ со дна трубки. Путем повышения эффективности отражения волн повышают точность оценки уровня жидкости в вертикальной трубке, когда она полностью заполнена. Если поверхность 380 колпачка была бы грубой или располагалась под углом к УДУ 362, отраженный звук мог бы быть рассеян от УДУ 362 и трубка выглядела бы пустой. По существу, это повышает надежность определения уровня хладагента в баллоне дегазатора.
На ФИГ. 9 приведен алгоритм 900 высокого уровня для определения уровня основного объема хладагента в баллоне дегазатора на основе показаний датчика уровня в вертикальной трубке, соединенной с возможностью гидравлического сообщения, например в баллоне 308 дегазатора и вертикальной трубке 310. Алгоритм далее описывает регулирование параметров двигателя на основе уровня основного объема хладагента. Алгоритм 900 можно исполнять непрерывно во время работы двигателя для проверки достаточности уровня хладагента в системе хладагента для предупреждения перегрева компонентов двигателя. Любой цикл алгоритма 900 в данном случае можно назвать периодом измерений. Алгоритм состоит из оценки уровня хладагента в вертикальной трубке на основе данных ультразвукового датчика уровня, регулирования оценки уровня хладагента в вертикальной трубке на основе параметров колебаний, таких как ускорение автомобиля, высота автомобиля и предыдущие уровни хладагента для определения текущего уровня хладагента в баллоне дегазатора, регулирования долгосрочного уровня основного объема хладагента на основе оценки текущего уровня хладагента в баллоне дегазатора, и регулирования рабочих параметров двигателя на основе долгосрочного уровня основного объема хладагента.
Алгоритм 900 начинается на шаге 902, когда ультразвуковой датчик уровня может периодически излучать серию ультразвуковых импульсов со дна вертикальной трубки. Например, как описано выше, УДУ может излучать серию 5 последовательных ультразвуковых импульсов заданной энергии, с интервалом 5-8 миллисекунд между каждым импульсом. Энергию излученных импульсов можно определить на основе нескольких факторов, учитывающих обратную связь с энергией предыдущих полученных импульсов. В частности, энергию импульсов можно увеличить, если предыдущие возвратные импульсы были ниже порогового количества энергии, или не были приняты, с возможностью снижения, если было принято количество, превышающее пороговое количество волновых эхо-сигналов второго и/или третьего порядка. Временной интервал между каждой группой импульсов можно определить на основе ожидаемых значений скорости звука в жидкости и общей длины трубки, подлежащей измерению, так что время, по крайней мере, длиннее периода первой гармонической волны трубка/жидкость. Например, УДУ может излучать серию импульсов каждые 100 миллисекунд.
После того, как УДУ излучает ультразвуковой импульс, он может пройти вверх через хладагент в трубку, пока не достигнет промежуточной поверхности раздела, например, поверхность раздела хладагент-воздух или поверхность раздела воздух-твердое тело, если внутри трубки нет хладагента. Часть энергии, ассоциируемой с ультразвуковым импульсом, может быть отражена от поверхности раздела, создав эхо-импульс, а остальная часть энергии, ассоциируемая с ультразвуковым импульсом может пройти или преломиться через поверхность раздела или рассеяться другим образом. Эхо-импульс может пройти обратно к ультразвуковому датчику уровня и на шаге 904 может быть обнаружен ультразвуковым датчиком. Такой эхо-сигнал можно назвать эхо-сигналом первого порядка. В некоторых примерах эхо-импульс может находиться на уровне или ниже нижнего порогового значения энергии, и таким образом, датчик может его не обнаружить. В других примерах, эхо-сигнал, принятый ультразвуковым датчиком уровня, может быть вторым эхом-сигналом, ассоциируемым с излученным импульсом. Каждому обнаруженному эхо-сигналу можно присвоить временную метку, как описано более подробно ниже.
После возврата нескольких последовательных эхо-сигналов с достаточной энергией, можно сравнить ассоциированные временные метки первичных, вторичных и третичных эхо-сигналов друг с другом и несколькими первичными эхо-сигналами. Эти эхо-сигналы коррелируют с ожидаемой частотной характеристикой. Эти временные метки обеспечены достаточным разрешением по времени для надлежащего анализа сигналов и показывают количество времени, прошедшее между эмиссией и получением указанного эхо-сигнала. Такая временная метка может быть названа в данном случае временем эхо-сигнала. В некоторых примерах, временную метку можно присвоить только импульсам с энергией равной или выше нижнего порогового значения энергии. Если отдельный УДУ выполнен с возможностью посылать и принимать сигналы в пределах вертикальной трубки, датчик может быть выполнен с возможностью игнорировать импульсы в течение порогового интервала после окончания излучаемого волнения. Такой пороговый интервал в данном случае можно назвать «временем гашения», которое связано с потенциальным отражением, которое может произойти в нижней части жидкостной поверхности раздела и дать ложную индикацию низкого уровня жидкости. Время гашения можно определить на основе ряда факторов, таких как материалы, используемые для корпуса датчиков, материала соединений, способствующие передаче от преобразователя до корпуса, и другие геометрические отличительные признаки, присутствующие в трубке. Внутренний компьютер или процессор печатной платы УДУ могут также определять эхо-сигналы как эхо-сигналы первого порядка или высшего порядка, как например, эхо-сигналы второго порядка.
На шаге 906 внутренний компьютер УДУ может определить время эхо-сигнала для каждого принятого импульса. На основе этих значений времени эхо-сигнала компьютер УДУ может также провести внутреннюю оценку локального уровня хладагента в трубке. Оценка внутренней высоты хладагента может быть основана на расчетной скорости звука в хладагенте, с учетом компенсационного фактора температуры и времени эхо-сигнала.
Уровень хладагента можно определить для каждого эхо-сигнала первого порядка в период измерения. Среднее значение уровней хладагента в данном периоде времени можно определить для достижения окончательного локального уровня хладагента, обработанного датчиком, в вертикальной трубке. Проводят сравнение между этими сигналами для обеспечения того, что данный сигнал является истинным показанием уровня жидкости. Во время условий, при которых чрезмерное перемешивание жидкости или внутриимпульсное перемещение жидкость-воздух возможно перепутать с менее точными показаниями, возникает необходимость в более сложных статистических определениях для анализа временных меток эхо-сигналов первого порядка. Таким образом, определение среднего значения может состоять из одного или более определения режима колебания, среднего, срединного значения, взвешенного среднего значения, другой статистической функции, и стандартного отклонения, и дальнейшей обработки уровней хладагента с помощью соответствующего среднего или срединного значения на основе посторонних значений выборки данных. Например, когда значения времени первичного эхо-сигнала в группе импульсов находятся в пределах 1 микросекунды друг от друга, может быть указан высококачественный сигнал. Однако в случае, когда время одного первичного эхо-сигнала значительно отличается от другого, может быть указан более низкий уровень достоверности.
На шаге 908 количество энергии, подаваемой на УДУ для излучения импульсов, можно регулировать на основе одной или более энергий и количества импульсов времени эхо-сигнала первого и второго порядка для текущего периода измерений. В одном примере можно применить алгоритм 1000 (на ФИГ. 10) для регулирования подачи энергии. Регулирование энергии, подаваемой на УДУ для излучения импульсов, может содержать выборочное повышение энергии, когда первое пороговое количество полученных импульсов меньше нижнего порогового значения энергии, и выборочное снижение энергии, когда второе пороговое количество эхо-сигналов высшего порядка получено в течение периода измерений. Пороговое количество полученных импульсов может быть основано на наличии данных первичного эхо-сигнала (например, пороговое количество может иметь размер серии импульсов), тогда как пороговое количество эхо-сигналов высшего порядка может быть основано на имеющихся значениях времени эхо-сигнала второго порядка. Регулирование энергии, подаваемой на УДУ, описано ниже со ссылкой на ФИГ. 10.
УДУ может передавать информацию, ассоциируемую с излученными и полученными импульсами текущего периода измерений, на контроллер двигателя (например, контроллер 12) на шаге 910. Например, УДУ может передавать некоторое количество полученных эхо-сигналов выше нижнего порогового значения энергии, обработанную датчиком оценку локального уровня хладагента, временные метки для эхо-сигналов первого и второго порядка каждого излученного импульса в период измерений и оценки температур контура датчика и хладагента в трубке. Оценки температуры платы УДУ и температуры хладагента в трубке можно определить посредством датчиков 367 и 369, соответственно. На основе этой информации контроллер двигателя может затем определить уровень хладагента в вертикальной трубке. Уровень хладагента в вертикальной трубке в данном случае можно называть локальным уровнем хладагента или локальным уровнем. Определение локального уровня хладагента может предусматривать использование обработанной датчиком оценки как оценки локального уровня хладагента или, альтернативно, может предусматривать расчет уровня на основе значений времени эхо-сигнала, расстояния гашения и физическую длину трубки. Определение локального уровня хладагента описано более подробно со ссылкой на ФИГ. 11.
Уровень хладагента в вертикальной трубке может не соответствовать непосредственно уровню хладагента в баллоне дегазатора, последний уровень в данном случае также называют уровнем основного объема хладагента или уровнем основного объема. Например, если автомобиль производит ускорение или замедление или расположен на высоте, локальный уровень хладагента может отклоняться от уровня основного объема хладагента из-за колебаний. Для согласования отклонения уровня основного объема от локального уровня из-за колебаний контроллер двигателя может оценить поправку. Эту поправку можно использовать для корректировки оценки локального уровня хладагента относительно оценки уровня основного объема хладагента на шаге 914, например, посредством алгоритма 1400 на ФИГ. 14. Поправка может быть основана на параметрах движения автомобиля, например, на основе одного и более положений в продольной плоскости и продольного ускорения, в поперечной плоскости и поперечного ускорения. Применение поправки относительно оценки локального уровня хладагента с учетом колебаний описано более подробно со ссылкой на ФИГ. 14.
После того, как будет определена отрегулированная оценка локального уровня хладагента для измерительного периода на шаге 914, алгоритм 900 переходит к шагу 916, на котором оценка уровня основного объема хладагента может быть откорректирована на основе скорректированной оценки локального уровня хладагента. Корректировка оценки уровня основного объема хладагента может предусматривать внесение откорректированной оценки локального уровня хладагента в оценку уровня основного объема хладагента. Корректировка оценки уровня основного объема хладагента описана более подробно со ссылкой на ФИГ. 14 и 16. Оценку уровня основного объема хладагента нельзя будет откорректировать в измерительные периоды, во время которых не определена оценка уровня основного объема хладагента. Оценка уровня основного объема хладагента может соответствовать одному или более состояниям основного объема хладагента, при этом состояния основного объема хладагента определяют по одному или более пороговым значениям уровня.
Алгоритм 900 далее переходит к шагу 918, на котором состояние хладагента автомобиля можно корректировать на основе оценки уровня основного объема хладагента. Автомобиль может иметь фиксированное количество возможных состояний хладагента, например, ПУСТОЙ, НИЗКИЙ, ОК, ЛОЖНЫЙ или НЕИЗВЕСТНЫЙ/ УХУДШЕННЫЙ. Состояния хладагента могут соответствовать непосредственно уровню основного объема хладагента или могут указывать на ухудшение компонентов аппаратной части, например, ультразвукового датчика уровня. В некоторых случаях корректировка состояния хладагента может иметь место только если уровень хладагента, указывающий на новое состояние хладагента, сохранялся в течение порогового интервала.
На основе состояния хладагента на шаге 920 можно отрегулировать рабочие параметры двигателя. Например, когда уровень хладагента ниже порогового значения дольше, чем пороговый интервал, и рабочие параметры автомобиля предполагают возможность обнаружения надлежащего уровня хладагента, можно допустить низкое состояние хладагента. Это может привести к ограничению операции, по которой нагрузки на двигатель могут быть ограничены до уровня ниже верхнего порогового значения, чтобы обеспечить выполнение компонентами двигателя заданной операции. В другом примере, если состояние хладагента НИЗКОЕ, контроллер может дать сообщение водителю о низком уровне хладагента. Корректировка состояния хладагента описана более подробно со ссылкой на ФИГ. 18. В некоторых случаях, диагностика системы может быть выполнена на основе состояния хладагента на шаге 922, например, ухудшение работы датчика можно определить на основе состояния хладагента и изменения состояния хладагента в течение работы автомобиля. На этом алгоритм 900 завершается.
На ФИГ. 10 показан алгоритм 1000 для регулирования энергии, подаваемой на ультразвуковой датчик для излучения импульсов на основе обратной связи от энергии полученных импульсов. Энергию, подаваемую на ультразвуковой датчик уровня для излучения импульсов далее можно называть, как энергия передачи. Алгоритм 1000 можно выполнять во время каждого периода измерения, после получения серии импульсов, и он может повысить эффективность энергии ультразвукового датчика уровня.
Алгоритм 1000 начинается на шаге 1002, на котором количество эхо-сигналов первого порядка в пределах группы измерений с количеством энергии, превышающим нижнее пороговое значение, определяют и сравнивают с пороговым количеством. Нижнее пороговое значение энергии можно определить на основе фиксированного минимального значения. Это минимальное пороговое количество можно определить на основе предоставления достаточной функции при наиболее установившимся режиме работы. Например, если в течение периода измерений излучили 5 импульсов, пороговое количество может быть 4 импульса из 5 с количеством энергии выше нижнего порогового значения. Если количество эхо-сигналов с достаточной энергией выше порогового значения, можно определить, что выделенная энергия датчика достаточно высокая. Кроме того, можно определить, что возможна дальнейшая оптимизация выделенной энергии. В частности, если выделенная энергия достаточно высокая, выделенную энергию датчика можно снизить, не вызывая значительного уменьшения количества эхо-сигналов с достаточной энергией. Путем снижения выделяемой энергии, не затрагивая эффективности эхо-сигнала, можно достичь преимуществ сокращения энергии. Кроме того, при работе с высокоимпульсными эмиссионными энергиями существует возможность обнаружить дополнительные импульсы из-за неправильно отраженной энергии, что приводит к передаче ложных данных в систему измерений. Поэтому, полезно подавать сниженную ультразвуковую энергию, когда позволяют условия.
В одном примере, в ответ на достаточно низкое количество полученных достоверных первых волновых эхо-сигналов (например, 0 или 1), можно повысить уровень выхода энергии в попытке быстрого получения достаточной энергии для получения обратно достаточных возвратных сигналов 1-го/2-го порядка (например, 10%-20% увеличение). В другом примере, когда присутствуют все гармонические волны первого порядка и более чем высоко количество вторичных гармонических волн, достоверно возвращающихся (например, более чем 4 или 5 вторичных гармонических волн), количество передаваемой импульсной энергии сокращается на небольшое уменьшение (например, 1%-е сокращение). В других примерах, некоторые условия могут указывать на поддержание текущей энергии передачи, когда все переданные импульсы дают четкие значения времени первичного и вторичного эхо-сигнала.
Соответственно, если количество эхо-сигналов с количеством энергии, превышающим нижнее пороговое значение энергии, равно или превышает пороговое количество, алгоритм 1000 переходит к шагу 1004, на котором количество энергии, подаваемой на УДУ для излучения импульсов, можно снизить. В противном случае, если количество эхо-сигналов с количеством энергии, превышающим нижнее пороговое значение энергии, ниже порогового количества, алгоритм 1000 переходит к шагу 1006, на котором количество энергии, подаваемой на УДУ для излучения импульсов, можно повысить. В данном случае, на основе количества эхо-сигналов с достаточной энергией ниже порогового значения, можно определить, что выделенная энергия датчика не достаточно высокая. Кроме того, можно определить, что необходима дальнейшая оптимизация выделенной энергии. Соответственно, для увеличения количества эхо-сигналов с достаточной энергией, выход энергии УДУ повышают.
Уменьшение энергии передачи на шаге 1004 может содержать, согласно первому набору условий, уменьшение энергии передачи на первой скорости передачи, и согласно второму набору условий - уменьшение энергии передачи на второй скорости передачи, при этом вторая скорость передачи медленнее первой скорости передачи Например, первый набор условий может содержать получение порогового количества эхо-сигналов первого порядка с энергией выше нижнего порогового значения энергии, с одновременным получением нескольких импульсов высшего порядка, превышающее верхнее пороговое количество. В этом примере энергию передачи можно уменьшать на первой медленной скорости передачи, скорость передачи предназначена для обеспечения непрерывности сигналов, возвращаемых обратно с контролируемым сокращением энергии. Излишняя скорость сокращения может привести к искажению достаточных и недостаточных данных в чередующихся циклах. Такое искажающее поведение может затем дать ошибочное обнаружение потери надлежащей функции сигнала, что приводит к ненужным реакциям автомобиля. Второй набор условий может содержать каждый эхо-сигнал первого порядка в период измерений выше нижнего порогового значения энергии, и некоторое количество импульсов ниже верхнего порогового количества. В этом примере энергия передачи может быть уменьшена на второй темп замедления, причем указанный второй темп замедления меньше первого темпа замедления. В другом примере первый набор условий может содержать энергию передачи, которая будет на максимальном физическом уровне, и количество эхо-сигналов первого порядка выше нижнего порогового значения энергии превышает пороговое количество. Для сравнения, второй набор условий может содержать энергию передачи, которая будет на максимальном физическом уровне, и количество эхо-сигналов первого порядка выше нижнего порогового значения энергии будет ниже порогового количества.
Увеличение энергии передачи на шаге 1006 может предполагать, согласно первому набору условий, увеличение энергии передачи с первым темпом, согласно второму набору условий - увеличение энергии передачи со вторым темпом, причем второй темп медленнее первого темпа. В некоторых примерах, согласно третьему набору условий, передача энергии может быть резко увеличена до уровня физического максимума и может поддерживаться на уровне физического максимума до тех пор, пока не перестанут обнаруживаться указанные условия. Например, первый набор условий может содержать такое количество эхо-сигналов первого порядка с энергией выше нижнего порогового значения энергии, которое ниже нижнего порогового количества, но не равно нулю. В этом примере энергия передачи может быть увеличена с более высоким темпом, причем этот темп определяется на основе количества действительных отражений импульсов первого порядка, которое ниже порогового значения (например, пороговое значение может составлять 3 импульса). Второй набор условий может содержать наличие низкого количества отражений гармонических импульсов второго порядка (например, менее 3), и в таком случае энергия передачи может быть увеличена с низким темпом, причем темп определяется на основе баланса действительных отражений гармонических импульсов первого и второго порядка. Третий набор условий может содержать количество эхо-сигналов первого порядка с энергией выше нижнего порогового значения энергии, равное нулю. В этом примере энергия передачи может быть увеличена до максимального уровня. В некоторых примерах, если обнаружен один из первого или второго набора условий, но энергия передачи равна верхнему пороговому значению, причем верхнее пороговое значение ниже максимального уровня, то энергия передачи может поддерживаться на этом значении и не увеличиваться. В еще одном примере, энергия передачи может поддерживаться, если обнаружен один из первого или второго набора условий, но энергия передачи выше верхнего порогового значения и ниже максимального уровня.
На ФИГ. 11 показан пример алгоритма 1100 для оценки локального уровня хладагента в трубке на основе информации от ультразвукового датчика уровня и условий работы двигателя, и для регулировки этой оценки поправками. Во время первого набора условий оценка локального уровня хладагента может быть вычислена на основе обрабатываемой датчиком оценки уровня, и во время второго набора условий контроллер может оценивать оценку уровня на основе одной или более временных меток эхо-сигнала первого порядка, оценках температуры хладагента и схемы УДУ, расчетного смешивания хладагента, измерений ускорения автомобиля и положения в пространстве, и физических параметров трубки. Алгоритм 1100 может выполняться в ходе каждого периода измерений.
На шаге 1102 контроллер получает исходные данные от ультразвукового датчика уровня, включая, но не ограничиваясь этим, некоторое количество эхо-сигналов выше нижнего порогового значения энергии на шаге 1104, временные метки 1106 эхо-сигнала как для эхо-сигнала первого порядка, так и эхо-сигнала более высокого порядка, оценки 1110 температуры хладагента и печатной платы УДУ, в дополнение к получению обрабатываемой датчиком оценки 1108 уровня. На шаге 1112 двигатель может определять, являются ли состояния двигателя статическими, и если они являются статическими, может применять обрабатываемую датчиком оценку 1108 уровня как исходный уровень жидкости в трубке на шаге 1114. Определение того, являются ли состояние двигателя статическими, может предусматривать определение того, что один или более показателей меняется выше порогового значения: динамичный разгон автомобиля, боковой/поперечный наклон автомобиля и/или частота вращения двигателя Данные параметры могут быть определены на основе информации от датчиков ускорения автомобиля (например, от модулей контроля курсовой устойчивости или модулей подушек безопасности), а также рабочих параметров двигателя от модулей управления трансмиссии/двигателя.
Если состояния двигателя не определяются как статичные на шаге 1112, контроллер может переходить к расчету уровня хладагента на основе значений 1106 времени эхо-сигнала и температуры 1110. На шаге 1116 контроллер проверяет количество полученных эхо-сигналов первого порядка, которые равны или выше порогового значения энергии. В некоторых случаях пороговое значение энергии может быть на таком уровне энергии, на котором сигнал может быть отличен от шума. Если количество эхо-сигналов первого порядка, равное или выше порогового количества энергии, выше порогового количества эхо-сигналов, алгоритм 1100 переходит к шагу 1124 для расчета уровня хладагента на основе значений времени указанных эхо-сигналов первого порядка. Пороговое количество эхо-сигналов может быть определено на основе данных, собранных для базовой доли действительных первичных волновых эхо-сигналов, наблюдаемых на ровной поверхности в стационарных условиях. Например, если в период измерения входит 5 излучаемых импульсов, то пороговое значение может равняться 4.
В некоторых примерах эхо-сигнал первого порядка может быть ошибочно определен внутренним процессором печатной платы УДУ как эхо-сигнал более высокого порядка. Соответственно, на шаге 1118 контроллер может проверять временные метки эхо-сигнала более высокого порядка и определять, что один или более эхо-сигналов первого порядка были неправильно идентифицированы датчиком как эхо-сигналы более высокого порядка. Определение того, что эхо-сигнал первого порядка был неправильно идентифицирован, может быть основано на сравнении временных меток отражений для переданных эхо-сигналов первого порядка с оценками значения времени 2-го или 3-го порядка, которые могут иметь место (оценки на основе скорости звука и 4 длин трубки (2-й порядок) или 6 длин трубок (3-й порядок)). Если неправильной идентификации эхо-сигналов первого порядка не было, то количество эхо-сигналов первого порядка по-прежнему ниже порогового количества. В этом случае контроллер может отмечать недействительное значение для периода измерения на шаге 1128, поскольку не имеется достаточного количества точек данных, чтобы выполнить надежную оценку уровня хладагента в трубке. Отметка недействительного периода измерений также предполагает отказ от обновления уровня основного объема хладагента на основе данных от текущего периода измерения на шаге 1130, и использование данных об уровне основного объема от самого последнего действительного периода измерений на шаге 1132.
Если на шаге 1118 определено, что один или более эхо-сигналов первого порядка были неправильно идентифицированы как эхо-сигналы более высокого порядка, эти эхо-сигналы могут быть переназначены как эхо-сигналы первого порядка на шаге 1120. Контроллер может затем снова проверить, выше ли порогового количества эхо-сигналов количество эхо-сигналов первого порядка, находящееся на уровне или больше порогового значения энергии. Если количество по-прежнему ниже порогового количества, алгоритм 1100 может перейти к шагам 1128, 1130, 1132, как описано выше. Если указанное выше количество равно или больше порогового количества, алгоритм 1100 переходит к шагу 1124, где может быть определена оценка локального уровня хладагента, например с помощью алгоритма 1200 по ФИГ. 12.
На ФИГ. 12 можно видеть, что алгоритм 1200 представляет собой пример алгоритма для расчета оценки локального уровня хладагента на основе значений времени эхо-сигнала и некоторого количества оценок температуры. Расчет опирается на допущение, что импульсы ультразвука распространяются от датчика, достигают границы раздела фаз хладагент/воздух и отражаются обратно на ультразвуковой датчик за время, обозначенное соответствующей временной меткой. Оценка расстояния, пройденного импульсом ультразвука, оценивается на основе времени эхо-сигнала и оценки скорости распространения звука в хладагенте.
Алгоритм 1200 начинается на шаге 1202, на котором контроллер получает исходные значения времени эхо-сигнала первого порядка и температуры хладагента. На шаге 1204 состав смеси хладагента может быть оценен на основе сравнения оценки скорости звука (оцененной на основе среднего локального уровня в трубке на ровной поверхности) с текущей измеренной скоростью звука. Оценка скорости звука в хладагенте может быть затем определена на шаге 1206 на основе расчетного значения температуры хладагента и платы УДУ, а также расчетного состава смеси хладагента. Опираясь на расчетную скорость звука и временную метку, на шаге 1208 можно рассчитать расстояние, пройденное каждым импульсом, на основе формулы:
Расстояние=0.5* v_sound*t_0,
где v_sound представляет собой расчетную скорость звука, t_0 - значение времени эхо-сигнала первого порядка, и их произведение умножается на 0,5, чтобы учесть то, что при измерении уровня хладагента импульс должен пройти путь, определяемый уровнем жидкости, после чего вернуться обратно к датчику. Расстояние может быть оценено для каждого эхо-сигнала первого порядка в серии, энергия которого выше нижнего порогового значения энергии.
Возвращаясь к ФИГ. 11, на шаге 1126 оценка уровня хладагента, выполняемая алгоритмом 1200, может быть сравнена с физическим диапазоном трубки. Например, в памяти контроллера может храниться верхнее пороговое значение для максимального уровня хладагента, основанное на расстоянии между датчиком УДУ и верхней частью вертикального датчика, и может храниться нижнее пороговое значение для минимального уровня хладагента, основанное на расстоянии между датчиком УДУ и шлангом датчика нижнего уровня (316 на ФИГ. 3). В других примерах значение нижнего порогового значения может быть основано на зоне нечувствительности датчика. Физический диапазон вертикальной трубки может затем находиться на любом уровне между верхним физическим пороговым значением и нижним физическим пороговым значением. Если оценки локального уровня находятся вне физического диапазона трубки, алгоритм 1100 переходит к шагу 1128. В некоторых примерах нахождение в рамках физического диапазона трубки может предполагать нахождение в рамках запаса по пороговому значению ниже нижнего физического порогового значения или нахождение в рамках запаса по пороговому значению выше верхнего физического порогового значения. В этих примерах указанные запасы по пороговому значению могут быть определены на основе допусков деталей для ожидаемых наиболее неблагоприятных условий, и также на основе самих значений нижнего и верхнего физического порогового значения.
Однако, если расчетные уровни трубки находятся в рамках физического диапазона трубки, алгоритм 1100 переходит к шагу 1134, в котором принимается решение на основе того, находятся ли расчетные уровни трубки в рамках диапазона трубки или в рамках запасов по пороговому значению вне исходных данных трубки. Если исходные данные уровня в трубке находятся вне диапазона трубки и в рамках запасов по пороговому значению, исходные данные уровня в трубке фиксируется в рамках физических диапазонов на шаге 1136. Если исходные данные уровня в трубке находятся в рамках физического диапазона трубки на шаге 1134, фиксация может не требоваться, а алгоритм 1100 может продолжать работу на шаге 1138.
На шаге 1138 может быть определено среднее из расчетной и скорректированной оценки уровня. Определение среднего значения может состоять из одной или более проверки среднего, серединного и среднеквадратичного отклонения, дальнейшей обработки уровней хладагента с помощью соответствующих инструментов исключения образцов данных на основе среднего или серединного значения. Например, когда один или более образцов находится вне физического диапазона, определение среднего значения может содержать только те точки, которые были измерены как исходно находящиеся в рамках диапазона. Данное среднее значение может применяться как оценка исходного локального уровня хладагента или оценка исходного уровня хладагента в трубке в течение периода измерений. Данное среднее значение может затем быть применено как оценка исходного уровня хладагента в трубке на шаге 1140. На шаге 1142 может быть выполнен отдельный алгоритм для оценки уровня основного объема хладагента на основе оценки исходного уровня хладагента в трубке и других факторов, таких как ускорение автомобиля и положение в пространстве. Например, для оценки уровня основного объема хладагента может быть выполнен алгоритм 1400 по ФИГ. 14. Данный процесс описан более подробно со ссылками на ФИГ. 13-16.
На ФИГ. 13А-13С приведено изображение бачка хладагента (баллон 1302 дегазатора), соединенного с возможностью гидравлического сообщения с вертикальной трубкой 1304, при его расположении под тремя разными углами относительно горизонтальной плоскости. Баллон 1302 дегазатора показан вместе с колпачком 1328 баллона дегазатора. Верхнее гидравлическое соединение выполнено между баллоном 1302 дегазатора и вертикальной трубкой 1304 через шланг 1326 датчика верхнего уровня и оно может позволять воздуху переходить между верхней частью баллона 1302 дегазатора и верхней частью вертикальной трубки 1304. Когда баллон 1302 дегазатора и вертикальная трубка 1304 находятся горизонтально, шланг 1326 датчика верхнего уровня может горизонтально соединять два сосуда, как показано на ФИГ. 13А. Нижнее гидравлическое соединение выполнено между баллоном 1302 дегазатора и вертикальной трубкой 1304 через шланг 1318 датчика нижнего уровня и оно может позволять хладагенту 1306 переходить между баллоном 1302 дегазатора и вертикальной трубкой 1304. Шланг датчика нижнего уровня соединен с выпускным шлангом 1316 баллона дегазатора через тройник 1320, расположенный таким образом, что шланг 1318 датчика нижнего уровня отходит от выпускного шланга 1316 с уклоном вниз. Шланг 1318 датчика нижнего уровня соединен выпуском 1316 баллона дегазатора ниже нижней части баллона 1302 дегазатора, и выше по потоку выпуска 1322 турбины. Вертикальная трубка 1304 может содержать УДУ 1308 для оценки локального уровня хладагента. УДУ 1308 может быть соединен с локальной сетью контроллеров (не показана).
Путем установки гидравлического соединения между большим сосудом, таким как баллон 1302 дегазатора, и малым узким сосудом, таким как вертикальная трубка 1304, переход жидкости между двумя указанными сосудами производит более заметный эффект на уровень хладагента в меньшем сосуде, чем в большем сосуде. При некоторых условиях локальный уровень 1314 хладагента и уровень 1312 основного объема хладагента могут быть одинаковыми или по меньшей мере в рамках нижнего порогового значения каждого из них, как показано на ФИГ. 13А. Условия, в которых локальный уровень 1314 хладагента и уровень 1312 основного объема хладагента находятся в рамках нижних пороговых значений каждого, могут подразумевать ситуацию, когда автомобиль не разгоняется и когда автомобиль находится в ровном горизонтальном положении. При других условиях переход жидкости между баллоном 1302 дегазатора и вертикальной трубкой 1304 может привести к тому, что локальный уровень 1314 хладагента будет больше уровня 1312 основного объема хладагента по меньшей мере на пороговое значение. Пример условий, которые могут способствовать такому переходу жидкости, могут подразумевать ситуацию, когда автомобиль замедляется и когда автомобиль наклонен передней частью вниз в варианте осуществления, когда трубка находится в автомобиле впереди баллона дегазатора.
При еще одних условиях переход жидкости между баллоном 1302 дегазатора и вертикальной трубкой 1304 может привести к тому, что локальный уровень 1314 хладагента будет меньше уровня 1302 основного объема хладагента по меньшей мере на пороговое значение. Примерные условия, которые могут способствовать такому переходу жидкости, могут подразумевать ситуацию, когда автомобиль разгоняется и когда автомобиль наклонен передней частью вверх в варианте осуществления, когда трубка находится в автомобиле впереди баллона хладагента.
Чтобы отрегулировать оценку локального уровня хладагента до оценки уровня основного объема хладагента, могут использоваться оценки разгона автомобиля и положения в пространстве, чтобы оценить направление и величину разницы между уровнями хладагента, например, с помощью алгоритма 1400 по ФИГ. 14. Регулировка оценки локального уровня хладагента для учета уровня основного объема хладагента предполагает определение поправки как фактора оценки расхождения между локальным уровнем в трубке и уровнем основного объема хладагента. Данная поправка может обозначаться в данном случае как колебание жидкости или поправка на колебания жидкости. Поправка на колебания жидкости может иметь связанный знак и величину, и может складываться с исходными данными уровня в трубке для получения оценки скорректированного уровня в трубке. Таким образом, поправка на колебания жидкости может вычитаться и складываться с исходным уровнем в трубке, чтобы получать оценку скорректированного уровня в трубке, что показывает, каким будет уровень в трубке, если автомобиль находился бы на ровной горизонтальной поверхности и уровень в трубке и уровень основного объема находились бы в равновесии. Следовательно, оценка скорректированного уровня в трубке является мгновенной оценкой уровня хладагента в баллоне дегазатора. Оценка уровня основного объема хладагента может быть затем обновлена на основе указанной оценки скорректированного уровня в трубке. Выполнение алгоритма 1400 во время периода изменения может быть основано на том, существует ли действительное показание уровня хладагента в течение периода изменения. Например, алгоритм 1400 может быть выполнен во время периодов измерения, в которых были определены исходные данные уровня в трубке хладагента, и может не выполняться во время периодов измерения, в которых значения уровня хладагента были отмечены как недействительные, как например на шаге 1128 в алгоритме 1100.
Алгоритм 1400 начинается на шаге 1402, где контроллер двигателя получает исходные данные по локальному уровню хладагента для текущего периода измерений. Оценка исходного локального уровня хладагента может быть определена с помощью отдельного алгоритма, такого как алгоритм 1100 по ФИГ. 11. Оценка исходного уровня используется в алгоритме 1400 в сочетании с поправкой на колебания жидкости, чтобы определить оценку уровня основного объема хладагента. После получения оценки исходного уровня хладагента, алгоритм 1400 переходит к шагу 1404, на котором могут быть определены оценки продольного ускорения и положения в продольной плоскости. Оценки продольного ускорения могут опираться на данные, полученные от акселерометра или в качестве альтернативы от производной по времени результата измерений датчика скорости. Оценки положения в продольной плоскости могут опираться на данные от различных датчиков. Аналогично на шаге 1406 контроллер может определять оценки поперечного ускорения и положения автомобиля в поперечной плоскости. Оценки поперечного ускорения могут опираться на данные, полученные от акселерометра, или, в качестве альтернативы, могут оцениваться по результатам измерений скорости и частоты вращения колес. Оценки поперечного ускорения могут опираться на данные от различных датчиков.
На основе оценок ускорения и положения как в продольной, так и в поперечной плоскости, выполненных на шагах 1404 и 1406, через функцию передачи может быть определена ожидаемая или прогнозируемая поправка на колебания жидкости. В одном примере функция передачи может быть выражена следующим уравнением:
Прогнозируемое колебание жидкости = (Long. Gain)*[(Long. Acc. %)*(Long. Асе.)+(1-Long. Acc. %)*(Long. Att.)]+(Lat. Gain)*[(Lat. Acc. %)*(Lat. Accel.)+(1-Lat. Acc. %)*(Lat. Att.)],
где Long. Gain и Lat. Gain- долевые коэффициенты для оценок продольной и поперечной поправки на колебания жидкости, Long. Асс. % и Lat Асс. % - весовые коэффициенты, которые регулируют относительные вклады ускорения и положения в оценку колебания жидкости для каждого направления, Long. Асе. - расчетное продольное ускорение, Long. Att. - это расчетное положение в продольной плоскости, Lat. Асе. - это расчетное поперечное ускорение и Lat. Att. - это расчетное положение в поперечной плоскости. Оценки ускорения могут выражаться в единицах расстояния, деленных на время в квадрате, а оценки положения могут выражаться в единицах угла наклона или в процентах уклона по указанной оси. Определение продольного и поперечного усиления может опираться на взаимосвязь данных для автомобиля на ровной горизонтальной поверхности без ускорения и данных стенда с изменяющимся углом наклона или на основе данных по автомобилю, полученных в ходе серии разгонов и статичных положений, и может соответственно выражаться в единицах процентного вклада взаимосвязи. Весовой коэффициент ускорения и положения может быть определен на основе таких данных взаимосвязи с помощью метода аппроксимации данных (например, наименьшая квадратичная оценка).
После определения прогнозируемой поправки на колебания жидкости оценка скорректированного уровня хладагента в трубке (то есть оценка исходного уровня плюс прогнозируемая поправка на колебания жидкости) может быть выше или ниже физического диапазона трубки (как было указано ранее со ссылкой на ФИГ. 11). В указанных примерах прогнозируемая поправка на колебания жидкости может быть скорректирована на основе физического диапазона трубки. В одном примере, если результат сложения прогнозируемой поправки на колебания жидкости и оценки исходного уровня в трубке будет больше высоты трубки, корректировка прогнозируемой поправки на колебания жидкости на основе физического диапазона трубки может предполагать корректировку прогнозируемой поправки на колебания жидкости таким образом, чтобы оценка скорректированного уровня хладагента в трубке находилась на верхнем пороговом значении физического диапазона. В еще одном примере, если результат сложения прогнозируемой поправки на колебания жидкости и оценки исходного уровня в трубке будет меньше высоты бачка, регулировка прогнозируемой поправки на колебания жидкости может предполагать коррекцию оценки колебания жидкости таким образом, чтобы оценка скорректированного уровня хладагента в трубке находилась на нижнем пороговом значении физического диапазона.
В дополнение к прогнозируемой поправке на колебания жидкости на шаге 1412 может оцениваться фактическая поправка на колебания жидкости. Оценка фактической поправки на колебания жидкости может быть определена на основе сравнения оценки исходного уровня хладагента в трубке и оценки уровня основного объема. В одном примере фактическая поправка на колебания жидкости может представлять собой разницу между исходным уровнем хладагента в трубке в текущем периоде измерений и самой последней оценкой уровня основного объема.
На основе сравнения прогнозируемой поправки на колебания жидкости и фактического колебания жидкости на шаге 1414 может быть определена предполагаемая поправка на колебания жидкости. В одном примере определение предполагаемого колебания жидкости может предполагать, в обозначенном направлении ожидаемого колебания жидкости, выбор нижнего абсолютного значения фактического колебания жидкости и компенсированного уровня как предполагаемого колебания жидкости. Данный пример описывается далее в документе со ссылкой на ФИГ. 16. В еще одном примере, если и непроверенное прогнозируемое колебание жидкости, и фактическое колебание жидкости находятся в рамках физического диапазона трубки и величина прогнозируемого колебания жидкости больше величины фактического колебания жидкости, то прогнозируемое колебание может быть скорректировано на основе фактического колебания, затем применяемое как предполагаемое колебание. Данный пример также описан ниже со ссылкой на ФИГ. 17.
После определения предполагаемого колебания жидкости для указанного периода измерений указанное предполагаемое колебание жидкости может применяться к оценке исходного уровня в трубке на шаге 1416 для определения оценки скорректированного уровня хладагента в трубке. Оценка уровня основного объема хладагента может быть затем обновлена на основе указанной оценки скорректированного уровня хладагента в трубке на шаге 1418. В одном примере может использоваться фильтр для интеграции оценки скорректированного уровня хладагента в трубке от текущего периода измерений в долгосрочную оценку уровня основного объема хладагента. Фильтрация скорректированного уровня хладагента в трубке может предполагать фильтрацию через фильтр нижних частот, работающий на основе изменяющихся постоянных времени, причем указанная постоянная времени определяется на основе знака и величины разницы между мгновенным компенсированным значением колебания жидкости и долгосрочной оценкой уровня основного объема, а также на основе количества времени между последним действительным значением, текущим действительным значением и компенсированным значением колебания жидкости. Таким образом, переходные изменения в уровне хладагента могут быть смягчены, и может быть получена более стабильная оценка уровня основного объема хладагента.
Алгоритм 1400 затем переходит к шагу 1420, на котором может быть выполнена диагностика датчика на основе сравнения прогнозируемой поправки на колебание жидкости и фактических поправок на колебание жидкости для измерения. В одном примере интегральное прогнозируемое колебание жидкости и интегральное фактическое колебание жидкости могут быть соответственно обновлены на основе поправок прогнозируемого колебания и фактического колебания для указанного периода измерений. Эти интегральные значения могут быть увеличены, когда обнаружено прогнозируемое колебание жидкости или фактическое колебание жидкости, и могут быть уменьшены на фиксированное количество за каждый период измерений. Ухудшение состояния датчика может быть основано на соотношении этих двух интегральных значений и описывается далее со ссылкой на ФИГ. 15.
На ФИГ. 15 приведен алгоритм 1500 для определения того, снижаются ли характеристики ультразвукового датчика уровня в вертикальной трубке (такой как УДУ 362 по ФИГ. 3).
Алгоритм основан на сравнении количеств прогнозируемых колебаний жидкости и фактических колебаний жидкости, накопленных со временем. Накопление количеств прогнозируемых колебаний жидкости и фактических колебаний жидкости может быть описано интегральным значением прогнозируемого колебания и интегральным значением фактического колебания. Путем сравнения указанных интегральных значений контроллер двигателя может определить, больше или меньше ли колебаний жидкости, чем ожидалось, было обнаружено со временем, и в некоторых условиях может определять ухудшение свойств датчика на основе этого сравнения.
Алгоритм 1500 начинается на шаге 1502, на котором значение интегрального значения прогнозируемого колебания жидкости может быть увеличено, если прогнозируемое колебание жидкости было обнаружено в период измерений. Например, параметры движения могут указывать количество прогнозируемых колебаний жидкости на шаге 1408 на ФИГ. 14, и интегральное значение прогнозируемого колебания жидкости может быть увеличено на определенное количество, основанное на количестве прогнозируемого колебания жидкости в период измерений. Аналогично, если фактическое колебание жидкости было обнаружено в период измерения, интегральное значение фактического колебания жидкости может быть увеличено на шаге 1504. Количество, на которое увеличивается интегральное значение фактического колебания жидкости, может быть основано на количестве обнаруженного фактического колебания жидкости. На основе сравнения двух указанных интегральных значений может быть определено, что наблюдается ухудшение свойств ультразвукового датчика уровня в результате чрезмерного шума, если выполняется первый набор условий, и может быть определено, что ухудшение свойств наблюдается в результате заедания показаний, если выполняется второй набор условий.
На шаге 1506 каждое из интегральных значений прогнозируемого колебания жидкости и интегральное значение фактического колебания жидкости может быть уменьшено на заранее заданное количество. В одном примере каждое интегральное значение может быть уменьшено на одинаковое фиксированное количество за каждый период измерений, причем указанное фиксированное количество определяется на основе базового количества объединений измерений для каждого контура, выполненных при заверенных условиях без ускорения, в которых колебания жидкости ниже нижнего порогового количества колебания жидкости, и тем самым устанавливается базовый уровень шума для расчета. В еще одном примере интегральное значение фактического колебания жидкости может уменьшаться на первое фиксированное значение за каждый период измерений, интегральное значение прогнозируемого колебания жидкости может уменьшаться на второе фиксированное значение за каждый период измерений, причем первое определенное значение основано на базовом количестве объединений для каждого контура, измеренном при заверенных условиях без ускорения, в которых отсутствуют или имеются ограниченные колебания жидкости, и тем самым устанавливается базовый уровень шума для расчета, а второе значение представляет собой долю (например, 80%) от первого значения. Таким образом ожидаемый темп уменьшения интегрального значения смешается в сторону ожидания некоторого количества колебания во время каждого периода измерений. В еще одном примере каждое интегральное значение может быть уменьшено на одинаковое переменное значение в каждом периоде измерений, причем указанное переменное значение для каждого периода измерений может быть определено на основе тех же условий, что и приведенные выше, чтобы определить исходный уровень, а также предполагает изменение темпа увеличения на основе величины прогнозируемого колебания жидкости, рассчитанного мгновенно на основе сочетания с весовыми коэффициентами изменения продольного и поперечного ускорения и положения в пространстве. Еще в одном примере интегральное значение прогнозируемого колебания жидкости может быть уменьшено на первое переменное значение в каждом периоде измерений, а интегральное значение фактического колебания жидкости может быть уменьшено на второе переменное значение в каждом периоде измерений, причем указанные первое и второе значение определяются на тех же принципах, что и другие примеры комбинаций, перечисленные выше. Другие возможности для декрементирования могу предполагать декрементирование одного интегрального значения на фиксированное значение, и декрементирование второго интегрального значения на перемененное значение.
После того как каждое интегральное значение было инкрементировано на основе значений колебаний жидкости, обнаруженных во время периода измерений, и декрементировано на основе одного из приведенных выше примеров компенсации исходного уровня шума или аналогичной компенсации, соотношение интегрального значения фактического колебания жидкости и интегрального значения прогнозируемого колебания жидкости может быть определено на шаге 1508. В одном примере значение фактического интегрального значения колебания жидкости может быть разделено на значение прогнозируемого интегрального значения колебания жидкости, и это число может применяться как соотношение указанных двух значений.
На шаге 1510 данное соотношение сравнивают с верхним пороговым значением. Верхнее пороговое соотношение может быть определено на основе измерения самого большого соотношения из зарегистрированных во время испытаний, которые физически нарушают количество колебаний жидкости в трубке (например, установка автомобиль на вибростенд и использования стенда с различными амплитудами/частотами, чтобы выявить самые неблагоприятные случаи резонанса со значениями колебания жидкости). В качестве альтернативы верхнее пороговое соотношение может быть определено на основе прямого установления электрического сигнала шума от датчика уровня на входе в электронный блок управления. Если соотношение превышает верхнее пороговое значение, это может указывать на то, что было обнаружено больше колебаний жидкости, чем прогнозировалось, более чем на пороговое значение. Если соотношение превышает верхнее пороговое значение, алгоритм 1500 может перейти к шагу 1512, в котором контроллер может установить, что состояние ультразвукового датчика ухудшилось в результате шумности. После определения ухудшения состояния ультразвукового датчика в результате шумности алгоритм 1500 завершается.
Если соотношение не превышает верхнего порогового значения, алгоритм 1500 переходит к шагу 1514, на котором соотношение из шага 1508 может сравниваться с нижним пороговым значением. Нижнее пороговое значение может быть определено на основе выполнения одного или более ездовых циклов (например, один из FTP или US06) при почти пустой, почти полной и заполненной наполовину трубке/баллоне дегазатора при измерении перед каждым испытанием на ровном горизонтальном участке дороги. Данные испытания предполагают полное пережатие верхнего или нижнего шланга трубки, чтобы предотвратить обмен газом или жидкостью в ходе ездового цикла. Таким образом, нижнее пороговое значение может представлять собой базовый уровень шума.
Наименьшее соотношение, зарегистрированное во время данных испытаний, используется для настройки нижнего порогового уровня. Если соотношение меньше нижнего порогового значения, это может указывать на то, что было обнаружено меньше колебаний жидкости, чем прогнозировалось, более чем на пороговое значение.
Если соотношение меньше нижнего порогового значения, алгоритм 1500 может перейти к шагу 1516, на котором контроллер может установить, что ультразвуковой датчик уровня заело или имеются физические помехи перетеканию жидкости между баллоном дегазатора и вертикальной трубкой. Контроллер может различать эти два варианта ухудшения состояния на основе ожидания как заданного периода времени, так и пройденного пробега до определения того, исчезла ли неисправность, тем самым предполагая, что соотношение занижено из-за засорения. Если соотношение не меньше нижнего порогового значения, алгоритм 1500 переходит к шагу 1518, на котором не наблюдается ухудшение состояния, и алгоритм 1500 затем завершается.
На ФИГ. 16 показана схема 1600 управления для определения допускаемого колебания жидкости, применения указанного допускаемого колебания жидкости к исходному уровню хладагента в трубке для определения скорректированного уровня хладагента в трубке, и обновления уровня основного объема хладагента на основе указанного скорректированного уровня хладагента в трубке. Данные от датчиков движения, таких как датчик 1602 ускорения, датчик 1604 высоты, датчик 1606 скорости автомобиля, датчик 1608 частоты вращения колес, могут использоваться на шаге 1610 для определения продольного ускорения, поперечного ускорения, положения в продольной плоскости и положения в поперечной плоскости. В некоторых примерах и продольное, и поперечное ускорение может определяться на основе данных от одного ускорения. В еще одних примерах продольное и поперечное ускорение может определяться с помощью отдельных датчиков ускорения. Аналогичным образом, положения в продольной и поперечной плоскости могут определяться с помощью одного или нескольких датчиков положения. На шаге 1612 переменные 1610 используются как входные сигналы для функции определения прогнозируемого колебания 1614 жидкости. В одном примере функция 1612 может быть выражена уравнением, описанным со ссылкой на ФИГ. 14. Прогнозируемое колебание 1614 жидкости может затем быть скорректировано на шаге 1620, и, в качестве дополнения, интегральное значение 1644 прогнозируемого колебания жидкости может быть инкрементировано на основе прогнозируемого колебания 1614 жидкости. Интегральное значение 1644 прогнозируемого колебания жидкости описывается более подробно далее в настоящей заявке. Коррекция 1620 может опираться на физический диапазон трубки 1618, как описано выше со ссылками на ФИГ. 14, причем указанный диапазон может быть сохранен в памяти контроллера 1616, где к нему может осуществляться доступ. Коррекция прогнозируемого колебания 1614 жидкости на шаге 1620 приводит к получению оптимизированного прогнозируемого колебания 1622 жидкости.
В дополнение к оптимизированному прогнозируемому колебанию 1622 жидкости может быть определено фактическое колебание 1628 жидкости на основе разницы 1626 между исходным уровнем 1624 хладагента в трубке и уровнем 1625 основного объема хладагента. К уровням 1624 и 1625 хладагента можно осуществлять доступ через контроллер 1616. Интегральное значение 1646 фактического колебания жидкости может быть инкрементировано на основе фактического колебания 1628 жидкости. Интегральное значение фактического колебания жидкости описывается более подробно далее в настоящей заявке. Оптимизированное прогнозируемое колебание 1622 жидкости и фактическое колебание 1628 жидкости могут использоваться как входные сигналы для компенсатора 1630. Компенсатор 1630 может определять предполагаемое колебание 1632 жидкости на основе входных сигналов 1622 и 1628.
В одном примере компенсатор 1630 может сравнивать колебания 1622 и 1628 жидкости, применяя оптимизированное прогнозируемое колебание 1622 жидкости в качестве предполагаемого колебания 1632 жидкости при первом наборе условий, и применяя фактическое колебание 1628 жидкости в качестве предполагаемого колебания 1632 жидкости при втором наборе условий. Например, первый набор условий может содержать колебания 1622 и 1628 жидкости, имеющие одинаковый знак (то есть обе оценки показывают положительное значение или обе оценки показывают отрицательное значение колебания жидкости), причем оба колебания жидкости находятся в рамках физического диапазона трубки 1618, но оптимизированное прогнозируемое колебание 1622 жидкости имеет меньшую величину, чем фактическое колебание 1628 жидкости. Второй набор условий может содержать колебания 1622 и 1628 жидкости, имеющие одинаковый знак, причем оба колебания жидкости находятся в рамках физического диапазона трубки 1618, но фактическое колебание 1628 жидкости меньше по величине оптимизированного прогнозируемого колебания 1622 жидкости.
В еще одном примере компенсатор 1630 может регулировать оптимизированное прогнозируемое колебание 1622 жидкости на основе фактического колебания 1628 жидкости, и применять скорректированное значение колебания жидкости в качестве предполагаемого колебания 1632 жидкости. Регулирование оптимизированного прогнозируемого колебания 1622 жидкости на основе фактического колебания 1628 жидкости может предполагать, если прогнозируемое колебание 1622 жидкости больше фактического колебания 1628 жидкости, применяя только часть оптимизированного прогнозируемого колебания 1622 жидкости в качестве предполагаемого колебания 1632 жидкости. Фактическое колебание 1628 жидкости может быть меньше оптимизированного прогнозируемого колебания 1622 жидкости, если имеются физические помехи обмену жидкостью между баллоном дегазатора и трубкой. Путем применения части оптимизированного прогнозируемого колебания жидкости в качестве предполагаемого колебания жидкости, когда оптимизированное прогнозируемое колебание жидкости больше фактического колебания жидкости, может быть улучшена точность оценки уровня основного объема хладагента. Если прогнозируемое колебание 1622 жидкости меньше фактического колебания 1628 жидкости, регулировка оптимизированного прогнозируемого колебания 1622 жидкости на основе фактического колебания 1628 жидкости может предполагать компенсацию только на прогнозируемую величину, причем указанная прогнозируемая величина представляет собой значение, выбранное на основе заранее определенной схемы склонности автомобиля к колебанию жидкости.
Предполагаемое колебание 1632 жидкости может применяться к исходному уровню 1634 хладагента для определения скорректированного уровня 1638 хладагента. В одном примере применение предполагаемого колебания 1632 жидкости к исходному уровню 1634 хладагента в трубке может предполагать добавление предполагаемого колебания 1632 жидкости к исходному уровню 1638 хладагента в трубке. Фильтр 1640 может обновлять уровень 1639 основного объема хладагента (доступный через контроллер 1616) на основе скорректированного уровня 1638 хладагента в трубке, тем самым определяя обновленную оценку 1642 уровня основного объема хладагента. Фильтрация уровня 1639 основного объема хладагента на основе скорректированного уровня 1638 хладагента в трубке может содержать определение постоянной времени на основе суммарного значения компенсации колебания жидкости, применяемого к мгновенному значению уровня (например, больше фильтрации, если применяется больше компенсации), и также на основе величины с учетом знака скорректированного уровня 1638 хладагента в трубке и уровня 1639 основного объема хладагента. Состояние 1660 хладагента может быть затем обновлено на основе оценки 1642 обновленного уровня основного объема хладагента, как описано подробнее далее со ссылками на ФИГ. 18.
Возвращаясь к интегральному значению 1644 прогнозируемого колебания жидкости, указанное интегральное значение может быть инкрементировано на основе величины прогнозируемого колебания 1614 жидкости. Например, интегральное значение 1644 прогнозируемого колебания жидкости может быть инкрементировано на значение, которое прямо пропорционально прогнозируемому колебанию 1614 жидкости. Аналогичным образом интегральное значение 1646 фактического колебания жидкости может быть инкрементировано на основе величины фактического колебания 1628 жидкости. Интегральное значение 1644 прогнозируемого колебания жидкости и интегральное значение 1646 фактического колебания жидкости могут быть декрементированы на шагах 1645 и 1647, соответственно. В одном примере каждое интегральное значение может быть декрементировано на одинаковое фиксированное значение в каждом периоде измерений, причем указанное фиксированное значение определено на основе способов компенсации, описанных на шаге 1506 по ФИГ. 15. После того как интегральные значения 1644 и 1646 были декрементированы на шагах 1645 и 1647, состояние 1650 датчика может быть определено по меньшей мере частично на основе указанных интегральных значений. В одном примере соотношение интегрального значения 1646 фактического колебания жидкости и интегрального значения фактического колебания жидкости может быть разделено на величину интегрального значения прогнозируемого колебания жидкости, а определение состояния датчика может быть основано на сравнении данного соотношения с верхним пороговым значением и нижним пороговым значением.
На ФИГ. 17 показаны иллюстрации различных условий колебаний жидкости, которые может учитывать компенсатор 1630 по ФИГ. 16. Графики 1710, 1720, 1730, 1740 показывают уровни жидкости на основе расчетного колебания жидкости (пунктирные линии) и фактического колебания жидкости (сплошные линии). На шаге 1710 прогнозируемое колебание 1712 жидкости является положительным и больше максимального физического уровня трубки, тогда как фактическое колебание 1714 жидкости является положительным и находится на максимальном физическом уровне трубки. Во время такого условия фактическое колебание 1714 жидкости может быть применено к предполагаемому колебанию жидкости в течение периода измерений, так как возможна ситуация, когда временное препятствие в шланге (например, сепаратор жидкости) или фактический конец вертикальной трубки (например, из-за наложения) физически ограничивает колебание жидкости.
На шаге 1720 и прогнозируемое колебание 1722 жидкости, и фактическое колебание 1724 жидкости имеют положительное значение и находятся в пределах физического диапазона трубки, а величина прогнозируемого колебания 1722 жидкости больше величины фактического колебания 1724 жидкости. В таком состоянии только часть прогнозируемого колебания жидкости может быть применена в качестве предполагаемого колебания жидкости в течение периода измерений.
На шаге 1730 и прогнозируемое колебание 1732 жидкости, и фактическое колебание 1734 жидкости имеют положительно значение, а величина прогнозируемого колебания 1732 жидкости меньше, чем величина фактического колебания 1734 жидкости. В таком состоянии прогнозируемое колебание 1732 жидкости может быть применено в качестве предполагаемого колебания жидкости в течение периода измерений.
На шаге 1740 и прогнозируемое колебание 1742 жидкости, и фактическое колебание 1744 жидкости имеют отрицательное значение и находятся в пределах физического диапазона трубки. В таком состоянии фактическое колебание 1744 жидкости может быть применено в качестве предполагаемого колебания жидкости в течение периода измерений, так как может присутствовать временная закупорка шланга (например, сепаратор жидкости). Путем выбора колебания жидкости с меньшей величиной может быть достигнуто предотвращение чрезмерной компенсации для модели прогнозируемого колебания жидкости из-за неточных оценок усиления ускорения или положения для колебания жидкости, или для временной закупорки шланга.
На ФИГ. 18 показан алгоритм 1800 для обновления состояния хладагента на основе оценки уровня основного объема хладагента и текущего состояния хладагента. Оценка уровня основного объема хладагента может соответствовать одному или более состояниям хладагента. Например, оценка уровня основного объема хладагента может иметь значения ИСПРАВНЫЙ, НИЗКИЙ, ПУСТОЙ, НЕИЗВЕСТНЫЙ / УХУДШЕННЫЙ и НЕИСПРАВНЫЙ. В этом примере оценка уровня основного объема хладагента может иметь значение ИСПРАВНЫЙ, если он выше верхнего порогового уровня, и может иметь значение НИЗКИЙ, если он ниже верхнего порогового значения, но выше нижнего порогового значения. В качестве дополнения оценка уровня основного объема хладагента может иметь значение ПУСТОЙ, если он ниже нижнего порогового значения. Более того, может быть определено среднее пороговое значение, как описано ниже со ссылками на шаги 1822 и 1826. В некоторых примерах алгоритм 1800 может обновлять состояние хладагента только в том случае, если оценка уровня основного объема хладагента, соответствующая другому состоянию хладагента, присутствовала дольше, чем пороговый интервал. Алгоритм 1800 может выполняться в системе хладагента, такой, как описанная на ФИГ. 2-9, и может выполняться во время каждого периода измерений, в котором определена действительная оценка уровня основного объема хладагента, после обновления оценки уровня основного объема хладагента (например, через алгоритм 1400 или схему1600 управления).
Алгоритм 1800 начинается на шаге 1802, на котором осуществляется получение от контроллера двигателя оценки 1804 уровня основного объема хладагента, текущего состояния 1806 хладагента и данных 1808 температуры. На шаге 1810 контроллер может определить, имеется ли неисправность системы хладагента. Состояниями, которые указывают на неисправности системы хладагента, могут быть потеря связи с локальной сетью контроллеров, получение нулевых эхо-сигналов во время периода измерений или превышение температурой двигателя верхнего порогового значения. Если на шаге 1810 определено, что система хладагента неисправна, алгоритм 1800 переходит к шагу 1812, на котором контроллер может установить, что уровень хладагента имеет значение НЕИСПРАВНЫЙ. Алгоритм 1800 может затем обновить состояние хладагента на шаге 1832 на основе текущего уровня хладагента и текущего состояния хладагента. Если на шаге 1810 определено, что в системе хладагента отсутствуют неисправности, алгоритм 1800 переходит к шагу 1814.
На шаге 1814 контроллер может определить, имеет ли место ухудшение состояния ультразвукового датчика уровня или является ли уровень хладагента неизвестным для текущего периода измерений. Любое из двух состояний может соответствовать состоянию хладагента НЕИЗВЕСТНЫЙ / УХУДШЕННЫЙ. Может быть определено, что имеет место ухудшение состояния ультразвукового датчика уровня, если, например контроллер двигателя ранее регистрировал шум датчика или заедание датчика на шаге 1512 или 1516 алгоритма 1500. В качестве альтернативы ухудшение датчика может быть определено, если прогнозируемое значение колебания жидкости предполагает, что регистрируемый мгновенный уровень ускорение/положения автомобиля слишком высокий, чтобы компенсировать (то есть, если прогнозируемое колебание жидкости указывает на переходное значение вне диапазона). Может быть определено, что уровень хладагента является НЕИЗВЕСТНЫМ / УХУДШЕННЫМ, если, например, оценка исходного уровня хладагента в трубке выходит за пределы физического диапазона трубки более чем на пороговое значение, как описано со ссылками на шаг 1126 по ФИГ. 11, или, в качестве альтернативы, если прогнозируемое колебание жидкости во время периода измерений больше пороговой величины, причем указанная пороговая величина определена на основе того, что прогнозируемое колебание жидкости превышает определенное количество процентов от суммарной высоты трубки (например, +/- 25 мм для трубки 100 мм). В качестве дополнения уровень хладагента может быть определен как НЕИЗВЕСТНЫЙ, если вернулось недостаточное количество действительных эхо-сигналов импульсов, но не в течение достаточного периода измерений, чтобы датчик присвоил уровню хладагента состояние НЕИСПРАВНЫЙ. Если определено ухудшение состояния ультразвукового датчика уровня или если определено, что оценка уровня основного объема хладагента является неизвестной во время периода измерений, на шаге 1816 контроллер может установить, что уровень хладагента находится в состоянии НЕИЗВЕСТНЫЙ / УХУДШЕННЫЙ. Алгоритм 1800 может затем обновить состояние хладагента на шаге 1832 на основе текущего уровня хладагента и текущего состояния хладагента, как описано подробнее ниже. Возвращаясь к шагу 1814, если состояния не указывают на ухудшение состояния ультразвукового датчика и если известна оценка уровня основного объема хладагента, алгоритм 1800 переходит к шагу 1818.
На шаге 1818 оценка уровня основного объема хладагента сравнивается с верхним пороговым уровнем, чтобы определить, находится ли уровень хладагента в состоянии ИСПРАВНЫЙ. Верхний пороговый уровень может быть определен на основе заранее заданной взаимосвязи измерений датчика, когда в автомобиль, неподвижно стоящий на ровной поверхности, залит хладагент до минимального рекомендованного производителем уровня. Если оценка уровня основного объема хладагента выше верхнего порогового уровня, текущий уровень хладагента на шаге 1820 может быть расценен как ИСПРАВНЫЙ. В некоторых примерах текущий уровень хладагента может быть расценен как ИСПРАВНЫЙ только тогда, когда оценка уровня основного объема хладагента выше верхнего порогового уровня более чем на определенное заранее заданное значение. Алгоритм 1800 может затем обновить состояние хладагента на шаге 1832 на основе текущего уровня хладагента и текущего состояния хладагента, как описано подробнее ниже. Возвращаясь к шагу 1818, если не определено, что оценка уровня основного объема хладагента выше верхнего порогового уровня, алгоритм 1800 переходит к шагу 1822.
На шаге 1822 оценка уровня основного объема хладагента сравнивается с средним пороговым уровнем для определения того, является ли уровень хладагента НИЗКИМ. Следует отметить, что на шаге 1822 уже было определено, что оценка уровня основного объема хладагента ниже верхнего порогового уровня. Средний пороговый уровень может также обозначаться в настоящей заявке как НИЗКИЙ пороговый уровень. Если определено, что оценка уровня основного объема хладагента выше НИЗКОГО порогового значения, уровень хладагента на шаге 1824 может быть расценен как НИЗКИЙ. Алгоритм 1800 может затем обновить состояние хладагента на шаге 1832 на основе текущего уровня хладагента и текущего состояния хладагента, как описано подробнее ниже. Возвращаясь к шагу 1822, если не определено, что оценка уровня основного объема хладагента выше верхнего порогового уровня, алгоритм 1800 переходит к шагу 1826.
На шаге 1826 оценка уровня основного объема хладагента сравнивается с нижним пороговым уровнем для определения того, находится ли уровень хладагента в состоянии НИЗКИЙ или ПУСТОЙ. Нижний пороговый уровень может также обозначаться в данном случае как ПУСТОЙ пороговый уровень. Следует отметить, что на шаге 1826 уже было определено, что оценка уровня основного объема хладагента ниже НИЗКОГО порогового уровня. Таким образом, на шаге 1826 определяется, что оценка уровня основного объема хладагента находится между НИЗКИМ и ПУСТЫМ пороговыми уровнями или находится ниже ПУСТОГО порогового уровня. Если оценка уровня основного объема хладагента ниже ПУСТОГО порогового уровня, уровень хладагента на шаге 1830 обозначается как ПУСТОЙ. Алгоритм 1800 может затем обновить состояние хладагента на шаге 1832 на основе текущего уровня хладагента и текущего состояния хладагента, как описано подробнее ниже. Возвращаясь к шагу 1826, если определено, что оценка уровня основного объема хладагента выше нижнего порогового уровня, алгоритм 1800 переходит к шагу 1828, в котором уровень хладагента определяется на основе состояния хладагента.
В частности, на шаге 1828, если оценка уровня основного объема хладагента выше ПУСТОГО порогового уровня, но ниже порогового уровня ИСПРАВНЫЙ, а состояние хладагента равно ПУСТОЙ, контроллер может установить, что уровень хладагента имеет состояние ПУСТОЙ. Если оценка уровня основного объема хладагента выше ПУСТОГО порогового уровня, а состояние хладагента имеет значение ИСПРАВНЫЙ, контроллер может установить, что уровень хладагента имеет состояние ИСПРАВНЫЙ. Таким образом, состояние хладагента может не изменяться с ПУСТОЙ на НИЗКИЙ до тех пор, пока оценка уровня основного объема хладагента выше порога ИСПРАВНЫЙ.
На шаге 1832 состояние хладагента может быть обновлено на основе уровня хладагента. В некоторых случаях корректировка состояния хладагента может иметь место только если уровень хладагента, указывающий на новое состояние хладагента, сохранялся в течение порогового интервала. Таким образом путем отказа от изменения состояния хладагента на основе краткосрочных отклонений в уровне хладагента выше порогового значения может быть повышена стабильность состояний хладагента. Поскольку изменение состояния хладагента может означать регулировку рабочих параметров двигателя, стабильное состояние хладагента может улучшить условия работы двигателя. В одном примере пороговый интервал может быть основан на пороговом количестве периодов измерений. Данный пороговый интервал может отличаться для каждого состояния хладагента, или, в качестве альтернативы, для каждой серии состояний хладагента. В качестве неограничивающего примера регулировка состояния хладагента из ИСПРАВНЫЙ в НИЗКИЙ может потребовать установления НИЗКОГО уровня основного объема хладагента для другого порогового количества периодов измерений, чем для регулировки состояния хладагента из НИЗКИЙ в ПУСТОЙ, для чего требуется установление уровня основного объема хладагента в состояние ПУСТОЙ.
В некоторых примерах на изменение состояния хладагента могут быть наложены ограничения. Например, состояние хладагента может изменяться только на ПУСТОЙ, если уровень хладагента был установлен ПУСТОЙ для первого порогового количества периодов измерений, и при это не установлен как один из НИЗКИЙ или ИСПРАВНЫЙ для второго порогового количества периодов измерений, причем указанное второе пороговое количество большое указанного первого порогового количества. Таким образом, переходные смещения в диапазон ПУСТОЙ могут быть отклонены и не приведут к ложному определению состояния ПУСТОЙ. В качестве дополнения состояние хладагента может изменяться только в состояние ПУСТОЙ после обнаружения движения автомобиля и обнаружения того, что автомобиль движется на передаче во время текущего ездового цикла. Таким образом, водитель автомобиля может заполнить систему хладагентом и позволить ей перейти в обнаруженное полностью ИСПРАВНОЕ состояние без необходимости постоянно сбрасывать блок управления, чтобы выйти из состояния ПУСТОЙ, если имеется такое требование.
На шаге 1834 выполняется регулировка рабочих параметров двигателя на основе обновленного состояния хладагента. В некоторых примерах состояние хладагента может не быть обновлено для указанного периода измерений, и параметры двигателя могут поддерживаться из предыдущего периода измерений. Однако, если состояние хладагента было обновлено, могут быть введены или сняты ограничения с рабочих параметров двигателя. Например, если состояние хладагента было обновлено с ИСПРАВНЫЙ на ПУСТОЙ, команды для нагрузок двигателя выше пороговой нагрузки могут быть запрещены, тогда как состояние хладагента остается ПУСТЫМ для предотвращения перегрева компонентов двигателя. Регулировка рабочих параметров двигателя, опирающаяся на состояние хладагента, описана подробнее ниже со ссылками на ФИГ. 19. На этом алгоритм 1800 завершается.
На ФИГ. 19 показан алгоритм 1900 для ограничения рабочих параметров двигателя на основе состояния хладагента, определенного алгоритмом 1800. Алгоритм 1900 может быть выполнен для каждого периода измерений, например на шаге 1834 алгоритма 1800. Контроллер двигателя может содержать набор режимов ограничений и может выбирать режим из набора режимов на основе состояния хладагента и интервала времени, в котором система хладагента была в указанном состоянии хладагента. Выбор режима ограничения может предполагать одно или более из ограничений нагрузки двигателя, которые ниже верхнего порогового значения, уменьшения ширины импульса впрыска для одной или более топливных форсунок на пороговое значение, полного выключения впрыска топлива для одной или более форсунок, принудительной работы двигателя на холостом ходу и отображения сообщений водителю автомобиля, содержащих информацию об уровне основного объема хладагента и о выбранном режиме ограничения. Отображение сообщений водителю автомобиля может означать указание любых ограничений, действующих в отношении двигателя/трансмиссии (например, ограничения на мощность, крутящий момент, частоту вращения двигателя, доступные передачи и т.п.), а также указание того, что необходимо добавление хладагента в случае НИЗКОГО состояния уровня, или указание того, что требуется немедленно остановить двигатель и добавить хладагент, если имеется состояние уровня ПУСТОЙ. Выбор режима ограничения может также означать отслеживание интервала, в течение которого двигатель работал в текущем режиме ограничения.
Алгоритм 1900 начинается на шаге 1902, на котором состояние хладагента извлекается из контроллера двигателя. Извлечение состояния хладагента может означать извлечение интервала, в течение которого был активен текущий режим хладагента. На шаге 1904 определяется, было ли изменено состояние хладагента во время текущего периода измерений. Если состояние хладагента было изменено, алгоритм 1900 переходит к шагу 1908, на котором может быть выбран режим ограничения на основе состояния хладагента и длительности указанного состояния хладагента. Выбор режима ограничения описан подробнее ниже. Если состояние хладагента не изменялось в текущем периоде измерений, алгоритм 1900 переходит к шагу 1906.
На шаге 1906 интервал, в течение которого было активно текущее состояние хладагента, сравнивается с одним или более пороговыми интервалами. В качестве дополнения интервал, в течение которого был активен текущий режим ограничения, может сравниваться с одним или более пороговыми интервалами. Если пороговый интервал не был достигнут, алгоритм 1900 переходит к шагу 1910, на котором может поддерживаться работа в текущем режиме ограничений. После этого алгоритм 1900 может быть завершен.
Возвращаясь в шагу 1906, если пороговый интервал был достигнут, алгоритм 1900 переходит к шагу 1906, в котором может быть выбран режим ограничения на основе состояния хладагента и длительности указанного состояния хладагента. Следует отметить, что шаг 1908 также может быть достигнут, если было изменено состояние хладагента во время текущего периода измерений. В одном примере набор режимов ограничения, из которых может осуществлять выбор контроллер двигателя, может означать по меньшей мере первый, второй и третий режим. В первом режиме ограничения контроллер двигателя может только указать водителю автомобиля, что уровень основного объема хладагента низкий и что автомобиль необходимо доставить в дилерский центр, но при этом не будут наложены ограничения на рабочие параметры двигателя, такие как нагрузка двигателя и впрыск топлива. Выбор второго режима ограничения может означать установление верхнего порогового значения на нагрузку двигателя и прерывание впрыска топлива в один или более цилиндров путем обнуления ширины импульса впрыска для указанных цилиндров. Третий режим ограничения может содержать ограничения по второму режиму, а может дополнительно ограничивать работу двигателя только холостым ходом.
В некоторых примерах выйти из конкретного режима ограничения невозможно, пока не выполнены определенные условия. В одном примере выйти из второго режима ограничения можно только после выключения и включения двигателя. Такой пример может также содержать выход из третьего режима ограничения только после посещения дилерского центра. В таких примерах выбор режима ограничения на шаге 1908 может также опираться на текущий режим ограничения. Например, двигатель может работать во втором режиме ограничения и текущее состояние хладагента может указывать на работу в первом режиме ограничения. Однако контроллер двигателя может не выбирать работу в первом режиме на основе работы в данный момент во втором режиме ограничения.
Выбор режима ограничения на шаге 1908 может предполагать, если состояние хладагента равно НИЗКИЙ или ПУСТОЙ, выбор первого режима ограничения, упомянутого выше. Выбор первого режима ограничения может означать работу в указанном первом режиме ограничения в течение порогового интервала и выбор одного из второго или третьего режима ограничения на основе состояний двигателя после порогового интервала.
Выбор режима ограничения на шаге 1908 может в качестве альтернативы подразумевать начало работы во втором режиме ограничения, если состояние хладагента было ПУСТОЙ дольше порогового интервала, действующего во втором режиме. Выбор второго режима ограничения может начать работу в указанном втором режиме ограничения в течение порогового интервала и выбор третьего режима ограничения после порогового интервала. Контроллер двигателя может также выбирать работу по втором режиме ограничения, если последнее известное состояние системы было ПУСТОЙ, а текущее состояние было НЕИЗВЕСТНЫЙ / УХУДШЕННЫЙ в течение порогового интервала, так как данное состояние может функционально быть аналогично ПУСТОЙ.
Выбор режима ограничения на шаге 1908 может далее подразумевать начало работы во втором режиме ограничения, если состояние хладагента было ПУСТОЙ дольше порогового интервала, действующего во втором режиме. Выбор третьего режима ограничения может начать работу в третьем режиме ограничения до тех пор, пока автомобиль не будет передан дилеру. Контроллер двигателя может только выбирать работу в третьем режиме ограничения, когда состояние хладагента подтверждено как равное ПУСТОЙ. Таким образом, могут быть ограничены рабочие параметры двигателя, чтобы избежать перегрева.
Технический эффект от использования системы, выполненной с возможностью установки расширительного бачка, имеющей внутренний отсек для удержания жидкости, и вертикальную полую трубку, расположенную снаружи емкости, и имеющую внутренний отсек для удержания жидкости, в которой самый нижний уровень отсека расположен вертикально, ниже самого низкого уровня внутреннего отсека бачка, и имеющую датчик, соединенный с самым нижним уровнем внутреннего отсека трубки, заключается в том, что уровень хладагента в бачке может измеряться более точно. Путем соединения с возможностью гидравлического сообщения трубки с расширительным бачком уровни жидкости могут выравниваться в двух емкостях, что позволяет высоте жидкости в емкости отражаться в высоте жидкости на вертикальной трубке. Путем оценки высоты жидкости в вертикальной трубке с помощью передачи ультразвуковых сигналов и обнаружения их эхо-сигналов на выходной сигнал датчика не влияют искажения, которые могут повлиять на резервуары общего объема жидкости, такие как изменения температуры и движения. В дополнение, технический эффект от регулировки оценки уровня жидкости в вертикальной полой трубке на основе параметров движения автомобиля заключается в том, что уровень жидкости может быть лучше компенсирован относительно изменений в результате колебания жидкости, а привод автомобиля может быть в ответ отрегулирован для более точной оценки уровня жидкости. Это также уменьшает изменчивость в оценках уровня жидкости, вызываемую колебанием жидкости. Путем ограничения мощности двигателя на основе оценки уровня жидкости в определенный интервал может быть уменьшен перегрев двигателя, вызванный уровнями хладагента в бачке. В дополнение, также может предотвращаться нежелательное срабатывание режимов неисправности, вызванное ложными низкими показаниями. Путем предоставления процессору возможности оценивать уровень жидкости в трубке на основе исходных данных и/или обработанных данных, сгенерированных ультразвуковым датчиком, улучшается точность и надежность оценки. В частности, технический эффект от получения любых из необработанных, исходных значений времени эхо-сигнала и обработанных данных об уровне жидкости от датчика, установленного в вертикальной трубке, и генерирования оценки уровня жидкости на основе исходных значений времени эхо-сигналов и данных датчика автомобиля во время некоторых условий, тогда как генерирование оценки уровня жидкости на основе обработанных данных во время других исходных данных, которые являются ненадежными, может быть отклонено и может не использоваться для оценки уровня жидкости. Это увеличивает долю надежных данных в первой оценке. В дополнение, мощность выходного сигнала датчика может быть оптимизирована на основе исходных данных, собранных на датчике. В частности, технический эффект от периодической передачи сигнала датчика от нижней части к верхней части вертикальной трубки, получения эхо-сигнала от переданного сигнала на датчике, регулировка мощности периодически передаваемых сигналов на основе средней длины интервала, прошедшего между передачей и приемом, заключается в том, что мощность датчика может быть отрегулирована для повышения количества и качества генерируемых эхо-сигналов первого порядка, при этом уменьшая количество генерируемых эхо-сигналов второго порядка. Это повышает точность и надежность оценки уровня жидкости, а также позволят уменьшить расход энергии. В целом уровни хладагента в системе охлаждения двигателя могут лучше отслеживаться, что повышает характеристики двигателя.
Следует отметить, что примеры алгоритмов управления и оценки, представленные в настоящей заявке, могут использоваться с различными конфигурациями систем двигателя и/или автомобиля. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и выполняться посредством системы управления, содержащей контроллер в сочетании с различными датчиками, приводами и другим аппаратным обеспечением двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, где раскрытые действия могут быть выполнены посредством исполнения инструкций в системе, содержащей различные компоненты аппаратного обеспечения двигателя совместно с электронным контроллером.
Следует понимать, что конфигурации и алгоритмы, раскрытые здесь, носят иллюстративный характер, и что эти конкретные варианты осуществления не следует рассматривать в качестве ограничения, так как возможны многочисленные модификации. Например, вышеизложенная технология может быть применена в двигателях с конфигурацией цилиндров V-6, I-4, I-6, V-12, с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения содержит все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, а также другие отличительные признаки, функции и/или свойства, раскрытые в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут содержать один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть помещены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются ли они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются помещенными в предмет настоящего изобретения.
Реферат
Изобретение относится к системе охлаждения двигателя автомобиля. Предложены способы и системы для улучшения оценки уровня хладагента двигателя с целью снижения перегрева двигателя. Уровень жидкости в расширительном бачке хладагента может быть определен на основе уровня жидкости в полой вертикальной трубке, соединенной с возможностью гидравлического сообщения с бачком в верхней и нижней части, причем уровень жидкости в трубке может быть определен на основе времени эхо-сигнала ультразвукового сигнала, испускаемого датчиком, расположенным в отсеке в нижней части вертикальной трубки. Выходные данные датчика компенсируются посредством поправки на основе параметров движения автомобиля, чтобы компенсировать отклонение уровня жидкости в связи с колебаниями жидкости, вызванными движением. Изобретение обеспечивает повышение точности определения уровня объема хладагента и рабочие параметры двигателя для предупреждения перегрева двигателя. 3 н.п., 16 з.п. ф-лы, 21 ил.
Комментарии