Сканирующий зондовый микроскоп с компактным сканером - RU2571449C2
Код документа: RU2571449C2
Чертежи


















Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Предпочтительные варианты осуществления направлены на высокоскоростной сканирующий зондовый микроскоп (СЗМ) и, в частности, на модуль Z-сканера для СЗМ, который является компактным и легким по весу, а также легко снимается с головки СЗМ для простоты использования, при этом сохраняя работоспособность СЗМ, включая функцию быстрого сканирования.
УРОВЕНЬ ТЕХНИКИ
Сканирующий зондовый микроскоп, такой как атомно-силовой микроскоп (АСМ), работает, обеспечивая относительное перемещение при сканировании между измерительным зондом и образцом при измерении одного или нескольких свойств образца. Типичная система АСМ схематически показана на Фигуре 1. АСМ 10 оснащен зондовым устройством 12, которое включает в себя зонд 14 с кантилевером 15. Сканер 24 выполняет относительное перемещение между зондом 14 и образцом 22, одновременно измеряя взаимодействие зонд-образец. Таким образом, можно получать изображения или производить другие измерения образца. Сканер 24 обычно состоит из одного или нескольких приводов, которые обеспечивают движение в трех ортогональных направлениях (XYZ). Часто сканер 24 представляет собой единый интегрированный блок, который включает в себя один или несколько приводов для перемещения либо образца, либо зонда по всем трем осям, например пьезоэлектрический привод трубы. Кроме того, сканер может представлять собой модуль из нескольких отдельных приводов. Некоторые АСМ разделяют сканер на несколько элементов, например XY сканер, который перемещает образец, и отдельный Z-привод, который перемещает зонд.
В обычной конфигурации зонд 14 часто соединен с колебательным приводом или приводом 16, который используется для перемещения зонда 14 с или в пределах резонансной частоты кантилевера 15. Альтернативные средства измеряют отклонение, кручение или другое движение кантилевера 15. Зонд 14 часто представляет собой кантилевер, изготовленный микротехнологическими методами, с интегрированным наконечником 17.
Как правило, для того чтобы привод 16, соединенный с клином держателя зонда (или, альтернативно, со сканером 24), заставил колебаться зонд 14, под управлением контроллера СЗМ 20 от источника сигнала переменного тока 18 подается электронный сигнал. Взаимодействие зонд-образец обычно контролируется методом обратной связи с помощью контроллера 20. Следует отметить, что привод 16 может быть соединен со сканером 24 и зондом 14, но также может быть выполнен как неотъемлемая часть кантилевера 15 зонда 14 в виде самоприводного кантилевера/зонда.
Часто выбранный зонд 14 двигается взад и вперед и контактирует с образцом 22, так как характеристики образца контролируются путем обнаружения изменений одной или нескольких характеристик колебания зонда 14, как описано выше. В связи с этим устройство обнаружения отклонения 25 обычно используется для направления луча на заднюю часть зонда 14, затем луч отражается в направлении детектора 26, например четырехквадрантного фотодетектора. Следует отметить, что зондирующий источник света устройства 25 обычно представляет собой лазер, зачастую лазерный диод видимого или инфракрасного спектра. Зондирующий луч света также может генерироваться другими источниками света, например гелий-неоновым лазером или другими лазерными генераторами, суперлюминесцентным диодом (SLD), светодиодом (LED), оптическим волокном или любым другим источником света, который может быть сфокусирован в виде маленького пятна. Поскольку луч проходит через детектор 26, соответствующие сигналы передаются в контроллер 20, который обрабатывает сигналы на предмет выявления изменений колебания зонда 14. Обычно контроллер 20 генерирует сигналы управления для обеспечения постоянного относительного взаимодействия между наконечником и образцом (или отклонения рычага 15), как правило, для обеспечения характеристики уставки колебания зонда 14. Например, контроллер 20 часто используется для обеспечения амплитуды колебания при значении уставки AS, чтобы гарантировать постоянную силу между зондом и образцом. В качестве альтернативы можно использовать уставку фазы или частоты.
Кроме того, в контроллере 20 и/или в отдельном контроллере или системе связанных или отдельных контроллеров предусматривается использование рабочей станции 40, которая получает собранные данные из контроллера и обрабатывает полученные во время сканирования данные для выбора точек, вычерчивания кривой и выполнения операций по определению расстояния. Рабочая станция может хранить полученную информацию в памяти, использовать ее для дополнительных расчетов, и/или выводить данные на соответствующий монитор, и/или передавать их на другой компьютер или устройство по проводам или беспроводным методом. Память может представлять собой любой электронный носитель для хранения данных, включая, помимо прочего, ОЗУ компьютера, жесткий диск, сетевой носитель данных, флэш-устройство или компакт-диск. Следует отметить, что сканер 24 часто включает в себя пьезоэлектрический стек (часто упоминаемый здесь как «пьезостек») или пьезоэлектрическую трубку, которая используется для создания относительного движения между измерительным зондом и поверхностью образца. Пьезостек - это устройство, которое движется в одном или нескольких направлениях в зависимости от напряжений, приложенных к электродам в стеке. Пьезостеки часто используются в сочетании с механическими рычагами привода, которые служат для направления, ограничения и/или усиления движения пьезостеков. Кроме того, рычаги используются для увеличения жесткости привода по одной или нескольким осям, как описано в одновременно рассматриваемой заявке №11/687304, поданной 16 марта 2007 года, под заголовком «Высокоскоростной сканер СЗМ и похожий способ использования». Приводы могут быть соединены с зондом, образцом или с ними обоими. Самый распространенный модуль привода представлен в виде XY-привода, который приводит в движение зонд или образец в горизонтальной или XY-плоскости, и Z-привода, который перемещает зонд или образец в вертикальном или Z-направлении.
Поскольку свойства СЗМ продолжают совершенствоваться, возникла необходимость визуализации различных типов образцов с большей скоростью для улучшения производительности измерения образцов (например, более 20 образцов в час) и/или измерения наноразмерных процессов с более высоким разрешением по времени, чем это возможно в настоящее время. Хотя изображения АСМ обеспечивают высокое пространственное разрешение (наноразмерное), они имеют в целом низкое временное разрешение. Как правило, запись высококачественных изображений АСМ занимает несколько минут, особенно при размерах сканирования больше нескольких микрон.
Скорость обработки изображений может ограничиваться рядом факторов, включая время реакции кантилевера, полезную пропускную способность сканера в плоскостях X, Y и Z, мощность и полосу пропускания усилителя высокого напряжения, который приводит сканер в движение, скорость измерения силы кантилевера, а также систему демодуляции и систему обратной связи прижимной силы.
Как и большинство измерительных устройств, АСМ часто требуют обеспечения компромиссного соотношения между разрешающей способностью и скоростью сбора данных. То есть некоторые имеющиеся в настоящее время АСМ могут сканировать простую поверхность с дискретностью в субангстремах. Эти сканеры способны сканировать только относительно небольшие участки образца, и то только при относительно низких скоростях сканирования. Для сканирования площади в несколько микрон с высоким разрешением (например, 512×512 пикселей) и малой прижимной силой общее время сканирования у традиционных промышленных АСМ обычно составляет несколько минут. Практический предел скорости сканирования АСМ является результатом максимальной скорости, с которой АСМ может быть отсканирован при сохранении достаточно малой прижимной силы, чтобы не повредить или не вызвать минимальное повреждение зонда и/или образца. Профессор Тошио Андо (Toshio Ando) из университета Каназава (Kanazawa) в Японии добился огромного прогресса с высокоскоростным АСМ, который сканирует образцы мм-размера на более коротких расстояниях, как правило, меньше 2 мкм. Для этого сочетания малых образцов и малых размеров сканирования профессор Андо добился скоростей развертки по видеочастоте с высоким разрешением.
Известны другие системы, обычно называемые «зондовые сканеры», которые предлагаются и/или реализованы с зондом, установленным на сканере. Одна такая система представлена в линейке оборудования, выпускаемого фирмой Veeco Instruments под названием Dimension®. Эта система использует относительно массивный сканер на основе ЭЛТ для Z-привода и имеет относительно низкую полосу пропускания. Другая система описывается Хваном (Hwang) в патенте США №7,249,494. В системе из заявки Хвана (Hwang) зонд закреплен на приводе, который, в свою очередь, установлен на объективе, фокусирующем входящий лазерный свет. Объектив, в свою очередь, установлен на x-y приводе. Однако, поскольку объектив и другая оптика системы являются неподвижными относительно зонда, для позиционирования сфокусированного лазерного луча на кантилевере требуются довольно большие зонды (шириной по меньшей мере 20 мкм и длиной больше 40 мкм). Типичные используемые зонды также имеют резонансную частоту F0 примерно 400 кГц и коэффициент качества Q около 400. Результирующая ответная полоса пропускания для этих зондов составляет порядка F0/Q ~1 кГц. Отчасти благодаря своему зонду с малым диапазоном рабочих частот результирующая система имеет максимальную частоту сканирования менее 30 Гц (или 30 линий сканирования в секунду) и более типичную частоту визуализации около 1 Гц.
С другой стороны, СЗМ, которые могут быстро регистрировать данные, также могут страдать из-за неприемлемых соотношений. Одна такая система представлена на рынке компанией Infinitesimal под названием Video AFM™. Система Video AFM™ работает с частотами видеосигнала, но значительно уступает по соотношению сигнал-шум, что в результате сказывается на качестве изображения. Система Infinitesima также работает в контактном режиме с силовой обратной связью, которая недостаточно быстро реагирует на изменения в рифлении образца в пределах строки развертки. В этой системе образец или зонд установлены на эталонном генераторе частоты. Зонд соприкасается с образцом, в то время как происходит сканирование образца или зонда в результате колебания эталонного генератора частоты на или в пределах его резонансной частоты. Поскольку для достижения высоких резонансных частот эталонные генераторы частоты должны быть достаточно малы (обычно порядка нескольких миллиметров по размеру), они очень чувствительны к нагрузке дополнительной массой. В результате лишь очень небольшие (порядка нескольких миллиметров по размеру) образцы или подложки кантилевера могут быть прикреплены к эталонному генератору частоты без ухудшения его рабочих характеристик.
Известно, что для обеспечения обзора поверхностных характеристик образца АСМ можно совместить с обычным оптическим микроскопом. В частности, объективы высокопроизводительного микроскопа имеют короткое рабочее расстояние и должны быть расположены близко к поверхности образца. Поэтому довольно трудно получить оптическое изображение высокого разрешения в сочетании с традиционными детекторами АСМ, поскольку между нижней частью объектива и зонда недостаточно места для соблюдения геометрии входящих и исходящих лучей обнаружения. Из-за веса оптического микроскопа трудно включить оптику оптического микроскопа в сканер АСМ, не снизив при этом частоту сканирования устройства.
В некоторых СЗМ с оптическим микроскопом была сделана попытка преодолеть это ограничение, направляя лазерный луч через объектив микроскопа. Одна такая система была представлена компанией Surface Imaging Systems под названием ULTRAOBJECTIVE™ и описана в международной публикации WO 01/23939. В системе ULTRAOBJECTIVE™ зонд АСМ ближнего поля модуль Z-привода для зонда и система оптической фокусировки выполнены в одном корпусе, образуя сменный объектив, который может вставляться в колонку с объективами оптического микроскопа. Его объектив зафиксирован относительно зонда, и в нем отсутствуют какие-либо механизмы для динамической фокусировки лазерного луча в зонде.
Другим недостатком АСМ с обычным оптическим микроскопом является то, что оптический микроскоп применяется только для обеспечения проверки образца. Он не играет никакой роли в фокусировке лазерного луча на кантилевере. Таким образом, даже если система была предназначена для фокусировки светового пятна на кантилевере, нет никакого механизма, который бы обеспечил пользователя оптической обратной связью в процессе фокусировки.
Решения этой проблемы есть. Однако к двум основным недостаткам обеспечения большой первой или фундаментальной резонансной частоты для всех движущихся компонентов АСМ относятся 1) размер и масса сканера и держателя зонда, и 2) нежесткое соединение этих компонентов с головкой АСМ и друг с другом.
Как показано на чертежах 2 и 3, большой держатель зонда 50 часто используется в обычных АСМ. В одном типе АСМ пьезоэлектрический привод трубки крепится в пределах головки АСМ, на дальнем конце которого находятся соединительные штифты для размещения держателя зонда, например держателя зонда 50. Держатель зонда включает в себя довольно массивный корпус 52 с монтажными отверстиями 62, предназначенными для монтажных штифтов. На поверхности корпуса 52 предусмотрен клин 54, который предназначен для обеспечения уголка и опоры кантилевера. Кронштейн 58 предназначен для удержания основания зондирующего устройства 56, опирающегося на клин 54. Винт 60 крепит кронштейн 58 к клину 54. Чтобы установить, снять или заменить зонд, достаточно нажать на задний конец кронштейна 58. В целом эта довольно массивная конструкция вместе со сканером занимает много места (десятки кубических дюймов). Эта движущаяся конструкция существенно ограничивает механический резонанс ACM, а тем самым и скорость сканирования АСМ.
Имеются и другие решения сканирования АСМ, но у каждого из них есть свои недостатки. Даже те, которые способны поддерживать высокую фундаментальную резонансную частоту, часто являются громоздкими, а следовательно, их трудно использовать. В частности, довольно трудно поднимать массивную головку и сканер, поворачивать и размещать его так, чтобы можно было устанавливать, снимать и выполнять замену зондов. В этой связи следует отметить, что зондирующее устройство является расходным материалом, который зачастую приходится менять каждый час, а иногда и чаще.
Таким образом, в сфере сканирующей зондовой микроскопии требуется сканер с улучшенной жесткостью конструкции и меньшей массой, который легко снимается для упрощения процедуры замены зонда. Также желательно, чтобы держатель зонда был маленьким и имел более высокую первую резонансную частоту. В конечном счете, идеально подошел бы сканер, который прост в использовании и обеспечивает быструю работу АСМ.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящие предпочтительные варианты осуществления изобретения обеспечивают быструю работу АСМ путем минимизации неблагоприятного влияния резонансной частоты системы из-за массивного сканирующего оборудования и держателей зондов. Компактный, относительно легкий Z-сканер выполнен таким образом, чтобы конус монтирования был жестко соединен с головкой АСМ. Кроме того, Z-сканер с механически жестким креплением конуса вмещает компактную конструкцию держателя зонда, который обеспечивает дальнейшие преимущества резонансной частоты. В результате слабые связи в резонансной цепи системы за счет использования больших держателей зондов, имеющих нежесткое соединение с головкой/сканером АСМ, являются более надежными, поэтому АСМ, использующие данную технологию, способны достичь значительно большей скорости сканирования, чем обычные АСМ. Помимо этого, в результате получается сканер, который легко снимается и поэтому очень прост в использовании, включая типичные операции настройки АСМ, такие как установка зонда. Фактически простота и легкость демонтажа и установки сканера сродни простой процедуре расстегивания пальцами одной кнопки на рубашке.
В соответствии с первым аспектом одного варианта осуществления изобретения сканер для сканирующего зондового микроскопа (СЗМ), включая головку, имеет кожух для корпуса, привод и датчик, который определяет движение сканера. В этом сканере корпус может сниматься с головки и имеет общий объем (без кабеля) около 1 кубического дюйма.
Согласно еще одному аспекту этого варианта осуществления изобретения, сканер представляет собой Z-сканер, обеспечивающий движение зондирующего устройства, подключенного к нему преимущественно только в направлении, перпендикулярном сканируемому образцу.
В еще одном аспекте этого варианта осуществления сканер включает в себя диафрагму изгиба между приводом и зондирующим устройством. Диафрагма изгиба ограничивает движение зондирующего устройства вбок относительно направления.
Согласно другому аспекту этого варианта осуществления, датчик практически напрямую измеряет движение зондирующего устройства в плоскости. Предпочтительно, чтобы датчик составлял с корпусом единое целое.
Согласно еще одному аспекту этого варианта осуществления, датчик включает в себя консольный элемент, имеющий фиксированный и свободный конец, а также соединение. Соединение подключается к свободному концу консольного элемента, а противоположный конец соединения подключается к держателю зонда, который крепится к зондирующему устройству.
В другом аспекте этого варианта осуществления корпус имеет первый открытый конец для подключения сканера к свободной концевой части головки СЗМ. Свободная концевая часть головки имеет наружную поверхность, выступающую в сторону образца. Корпус имеет второй закрытый конец, на котором расположен держатель зонда, и внутреннюю поверхность, проходящую между первым и вторым концами. Предпочтительно, чтобы внешняя и внутренняя поверхности имели одинаковую коническую форму и совпадали друг с другом. Угол, определяемый коническими поверхностями, составляет около 15-35 градусов и предпочтительно равен приблизительно 22°.
Согласно еще одному аспекту этого варианта, основная резонансная частота, связанная со сканером, составляет больше 10 кГц. Предпочтительно основная резонансная частота больше 40 кГц.
В еще одном варианте держатель зонда жестко соединен с корпусом. Внутренняя поверхность включает в себя кольцевой фиксатор для размещения уплотнительного элемента - уплотнительного кольца, устанавливаемого в пазу на наружной поверхности.
Согласно другому аспекту этого варианта осуществления изобретения, вакуумное отверстие в свободной концевой части передает вакуумную силу на корпус. Вакуумное отверстие соединяется с вакуумной диафрагмой в свободной концевой части, которая соединена с вакуумной диафрагмой в корпусе.
Эти и другие признаки и преимущества настоящего изобретения станут заметны для специалистов в данной области из следующего подробного описания и прилагаемых чертежей. Однако следует понимать, что подробное описание и конкретные примеры, показывающие предпочтительные варианты осуществления настоящего изобретения, приведены в качестве иллюстрации, а не ограничения. В пределах настоящего изобретения возможны различные изменения и модификации, не нарушающие его сущности, и данное изобретение включает в себя все такие модификации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные варианты осуществления изобретения показаны на прилагаемых чертежах, на которых везде одинаковые номера позиций обозначают одинаковые детали:
Фиг. 1 представляет собой схематический чертеж атомно-силового микроскопа (АСМ) известного уровня техники;
Фиг. 2 представляет собой вид сбоку держателя зонда известного уровня техники для атомно-силового микроскопа;
Фиг. 3 представляет собой вид сверху держателя зонда известного уровня техники на Фиг. 2;
Фиг. 4 представляет собой изометрическое изображение быстрой сканирующей головки АСМ в соответствии с предпочтительным вариантом осуществления изобретения, иллюстрирующее съемный Z-сканер предпочтительного варианта;
Фиг. 5 представляет собой схематическое изображение компонентов быстрой сканирующей головки АСМ на Фиг. 4;
Фиг. 6 представляет собой изометрическое изображение Z-сканера (вид сверху) в соответствии с предпочтительным вариантом осуществления изобретения;
Фиг. 7 представляет собой изометрическое изображение Z-сканера (вид снизу), показанного на Фиг. 6;
Фиг. 8 представляет собой схематическое изображение, вид сбоку в поперечном разрезе, иллюстрирующее диафрагму сканера и датчик;
Фиг. 9 представляет собой частично оторванное изометрическое изображение Z-сканера в поперечном разрезе, показанного на Фиг. 6;
Фиг. 10 представляет собой частично оторванное изометрическое изображение Z-сканера в поперечном разрезе, показанного на Фиг. 6;
Фиг. 11 представляет собой частично оторванное изометрическое изображение Z-сканера, показанного на Фиг. 6, соединенного с выступающей вниз свободной концевой частью головки сканера, показанной на Фиг. 4;
Фиг. 12 представляет собой изображение Z-сканера в поперечном разрезе, соединенного с выступающей вниз свободной концевой частью головки сканера АСМ, показанной на Фиг. 11;
Фиг. 12A представляет собой увеличенное изображение держателя зонда в поперечном разрезе, соединенного с Z-сканером, показанным на Фиг. 12;
Фиг. 13 представляет собой изображение Z-сканера в поперечном разрезе и свободного конца головки АСМ, показанной на Фиг. 11;
Фиг. 13А представляет собой увеличенное изображение интерфейса в поперечном разрезе между Z-сканером и свободным концом, показанным на Фиг. 13, иллюстрирующее кольцевой фиксатор в Z-сканере, который включает в себя уплотнительное кольцо, соединенное со свободным концом;
Фиг. 14 представляет собой отделенный ракурс держателя зонда в соответствии с предпочтительным вариантом осуществления изобретения, который показывает зажим зонда предпочтительного варианта осуществления изобретения;
Фиг. 15 представляет собой изображение держателя зонда и зажима зонда (вид сверху), показанного на Фиг. 14;
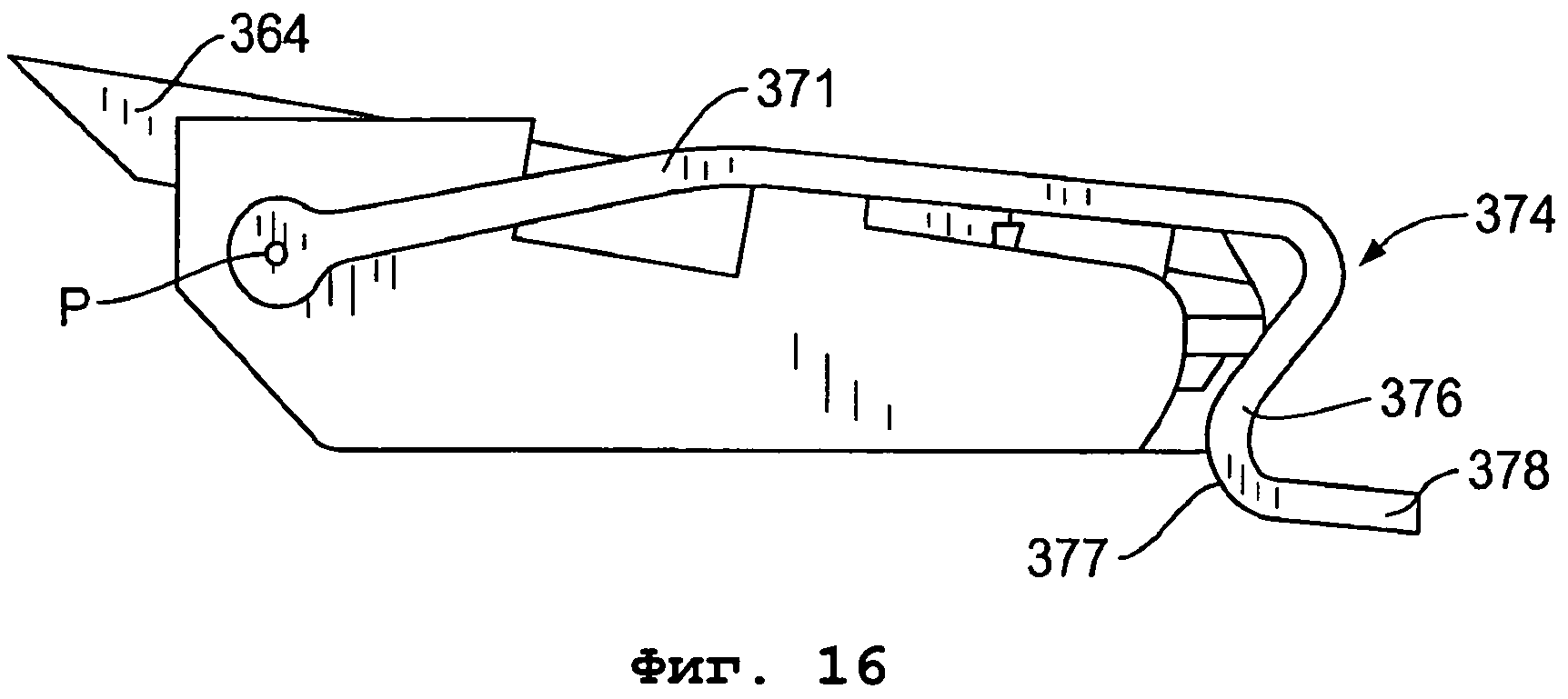
Фиг. 16 представляет собой изображение держателя зонда и зажима зонда (вид сбоку), показанного на Фиг. 14 и 15;
Фиг. 17 представляет собой изометрическое изображение держателя зонда и зажима зонда, показанного на Фиг. 15, иллюстрирующее зажим зонда в открытом положении; и
Фиг. 18 представляет собой график, иллюстрирующий динамику Z-сканера, связанную с Z-сканером известного уровня техники и Z-сканером в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предпочтительные варианты осуществления направлены на высокоскоростной сканирующий зондовый микроскоп. В частности, инновационная конструкция Z-сканера сочетается с компактным держателем зонда, интегрированным в него для совместного обеспечения сканирования образцов со скоростью, значительно превышающей показатели обычных СЗМ/АСМ. При этом, в отличие от АСМ известного уровня техники, которые ограничены сравнительно большими размерами сканеров/держателей зондов, имеющих более низкий резонанс, связанный с движущимися компонентами АСМ, приблизительно в несколько килогерц, компактная конструкция Z-сканера/держателя зонда предпочтительных вариантов осуществления изобретения позволяет существенно преодолеть резонансные ограничения системы, обеспечивая высокую скорость сканирования и стабильность работы АСМ настоящего изобретения. АСМ, использующие настоящую технологию, способны поддерживать резонансную частоту оси Z для всех движущихся компонентов на уровне более 50 кГц.
Как было показано изначально на Фигуре 4, быстро сканирующая головка АСМ 100 заключена в корпус 102, имеющий встроенные ручки 104 для удобной переноски АСМ. Головка 100 включает в себя нижнюю поверхность 106, на которой выступает свободная концевая часть 107, где предпочтительно находятся оптические и механические компоненты (см. Фигуру 5), иногда в тексте она называется «корпус 107», и выполнена с возможностью размещения съемного Z-сканера 110. Согласно более подробному описанию ниже, монтаж Z-сканера 110 на корпусе 107 объектива обеспечивает значительное преимущество в работе АСМ. В частности, внешняя поверхность корпуса 107 образует конус, чтобы можно было установить соответствующую коническую поверхность Z-сканера 110.
Z-сканер 110 также включает в себя соответствующий кабель и разъем 112 для управления сканером и связи с высокоскоростной головкой АСМ 100. Быстро сканирующая головка АСМ 100 также включает в себя соединительный кабель 114 головки АСМ и соответствующий разъем 116 для лазера и двигателя детектора, а также соответствующие концевые выключатели. Кабель 112 Z-сканера соединен с головкой 100 посредством разъема 113 головки, в то время как для позиционирования лазера на задней стороне кантилевера во время работы АСМ предусмотрен регулятор настройки лазерного пятна 128. Головка 100 также включает в себя кабель USB камеры 118 и разъем 120 для управления двигателями камеры и соответствующими выключателями света. Помимо этого, предусмотрен вакуумный трубопровод 122 вместе с вакуумным переключателем Z-сканера 124 и вакуумным выпуском Z-сканера 126, функции которых описываются далее по тексту.
Схематическое изображение компонентов головки АСМ 100 приводится на Фигуре 5. Головка 100 включает в себя XY-сканер 130 в конструкции зондового сканирующего АСМ, а также платформу подвески лазера 132, источник света (лазер) 134 и соответствующий объектив 136. Также в головке 100 предусмотрен детекторный каскад 154 и камера 140.
Для размещения оптики предусмотрен осветитель 142, который направляет луч на фокусирующую линзу 144 и далее в свободную концевую часть или корпус 107. Свободная концевая часть 107 также выступает на нижней поверхности 106 корпуса 102 (см. Фигуру 4) и позволяет устанавливать объектив 109. Кроме того, наряду с камерой 140 предусматривается фокусирующая линза 146. Камера 140 получает изображение образца, когда свет, отражаемый от образца, попадает на расщепитель луча 148 и поступает обратно в камеру 140. Платформа подвески лазера 132 включает в себя крепление для дихроического зеркала 150, которое направляет лазерный луч на заднюю часть зонда и обратно в детектор (отраженный луч) для измерения изменений отклонения зонда, амплитуды, частоты или фазы. Платформа подвески 132 также включает в себя регулировочные винты 152 для позиционирования луча «L» на задней стороне кантилевера (не показан) зондирующего устройства АСМ.
Детекторный каскад 154 головки АСМ 100 включает в себя фотодетектор 154 для обнаружения изменений положения лазерного луча, когда наконечник зонда взаимодействует с поверхностью.
На Фигурах 6 и 7 показана подробная схема Z-сканера 110. Z-сканер 110 включает в себя корпус сканера (или просто корпус) 200, который имеет практически форму сопла. Из корпуса сканера 200 выступает кабель сканера 112, который осуществляет электронное соединение сканера 110 с головкой АСМ 100, обеспечивая тем самым управление и связь между головкой 100 и сканером 110. Корпус 200 включает в себя первый или верхний конец 202, который открыт и позволяет выполнять жесткое соединение с головкой АСМ 100 (Фигура 4), как описано более подробно далее по тексту. Напротив первого конца 202 находится второй или нижний конец 204, который закрыт и герметично изолирован, поэтому он может помещаться в различные среды, включая жидкость, для защиты чувствительных компонентов сканера, находящихся в корпусе 200. На втором конце 204 предусмотрен держатель зонда 360. Держатель зонда 360 включает в себя поддерживающий зажим 362 для удержания зондирующих модулей во время работы АСМ, который описан далее по тексту в сочетании с Фигурами 13-16, и предпочтительно должен являться частью второго конца 204.
В частности, согласно Фигуре 6, первый конец 202 включает в себя закраину 212, которая выполнена с парой кольцевых пазов 214, 216, пазы, вытянутые вдоль закраины 212 и расположенные приблизительно на 180 градусов друг от друга. Пазы 214, 216 заканчиваются соответствующими отверстиями 218, 220, которые приспособлены под штифты указателя 160, соединенные с конструкцией головки 100 (например, XY-сканер) и уходящие вниз от свободного конца 107 (см. Фигуру 11, в изометрической проекции показан только один штифт). Когда Z-сканер 110 соединяется со свободным концом/корпусом объектива 107, необходимо правильно направить сканер 110, и, соответственно, требуется держатель зонда и зонд(ы), установленные на сканере 110. При соединении сканера 110 с корпусом 107 штифты 160 попадают в соответствующие пазы 214, 216 при вращении пользователем АСМ Z-сканера, до тех пор пока штифты 160 не попадут в отверстия 218, 220. Если штифты 160 попали в отверстия 218, 220, сканер направлен правильно и дальнейшее вращение сканера не допускается. В этом положении сканер 110 жестко крепится к головке 100.
На Фигурах 8, 9 и 10 показаны внутренние компоненты Z-сканера 110, в том числе Z-привод и соответствующий Z-датчик. Одной из проблем при создании компактного (малого объема), надежного и воспроизводимого сканера, который бы сохранял функциональность (например, высокую основную резонансную частоту) и при этом был бы прост в использовании, например, позволял легко выполнять такие задачи, как замена зондирующего устройства, является гарантия того, что сканер сможет поддерживать сканирующее движение в заданном направлении и что движение зонда можно будет точно измерить без ущерба для производительности сканера. Операции по отсоединению и присоединению гарантируют, что повторное позиционирование является достаточно точным для легкого выравнивания кантилевера зондирующего устройства в микронном диапазоне. Это реализовано в настоящих предпочтительных вариантах осуществления изобретения в соответствии с Фигурами, начиная со схематической Фигуры 8.
На Фигуре 8 сканер 110 (например, Z-сканер) включает в себя корпус 200, который состоит из первой части корпуса 201 и второй части корпуса 203, где компактно размещен, в данном случае, Z-датчик 264. Также имеется гибкая диафрагма 258, которая проходит вдоль нижней поверхности сканера 110 и соединяется со второй частью корпуса 203 в закрытом конце. Держатель зонда 360 выступает из второй части корпуса 203 и соединяется с диафрагмой 258. В частности, гибкая диафрагма 258 располагается между приводом 252 (т.е. пьезоэлектрическим кольцом) и держателем 360 для контроля и направления движения зонда, вызванного приводом 252. По существу, диафрагма 258 в основном обеспечивает движение зонда только в направлении «Z» (перпендикулярно образцу). С ее помощью в основном устраняются поперечные составляющие движения, поступающие от привода 252 (которые присущи типу привода, необходимому в этой компактной конструкции), что ограничивает передачу этих боковых составляющих подключенному держателю зонда 360 за счет существенной разницы в жесткости диафрагмы в поперечном и вертикальном направлениях. Диафрагма должна быть изготовлена предпочтительно путем механической обработки (до соответствующих характеристик для достижения обсуждаемого результата) в корпусе сканера. Кроме того, для обеспечения прохождения лазерного луча и оптического пути в центре диафрагмы располагается отверстие или окно 280. В результате при движении Z-сканера не будет нарушено чрезвычайно точное позиционирование наконечника, необходимое во время работы высокоскоростного ACM. Более подробно предпочтительный вариант осуществления диафрагмы также показан на Фигуре 12.
Согласно Фигуре 8, Z-сканер 110 также включает в себя датчик 264, интегрированный в корпус 200. Датчик 264 включает в себя основание, из которого сделан уступ или консольная часть 272, служащая опорой для одного или нескольких элементов тензометрического датчика 274 (резистивные, например). Фактически движение зонда контролируется непосредственно путем стыковки соединения 260 между диафрагмой 258 в месте опоры держателя зонда 360 и дальним концом уступа 272. При движении зонда в плоскости «Z» усилия в направлении Z передаются на соединение 260, а затем на уступ 272. Когда уступ отклоняется, элементы датчика 274 выполняют количественную оценку отклонения и, таким образом, Z-движения зонда. Таким образом, очень надежный и точный датчик 264 еще больше облегчает работу АСМ.
В целом Z-сканер 110 достаточно компактен, чтобы его можно было снимать с головки АСМ 100, и позволяет выполнять обычные действия, такие как ремонт и замена зонда. Сканер 110 является не только съемным, но и способен достигать максимальной производительности (как описано далее по тексту), занимая при этом минимум полезного объема АСМ, как правило, меньше пяти кубических дюймов, в большинстве случаев - меньше одного кубического дюйма (без кабеля).
В одном конкретном варианте осуществления изобретения, согласно Фигурам 9 и 10, корпус 200 Z-сканера 110 включает в себя первую часть корпуса 201, которая соединяется со второй частью корпуса 203 посредством стыковочного кольца 250. Эти компоненты приварены (например, лазерной сваркой) или иным образом прикреплены ко всем местам соединения Z-сканера 110, тем самым обеспечивая герметичный замок.
Z-сканер 110 также включает в себя Z-привод 252, который предпочтительно представляет собой пьезоэлектрическое кольцо. Это кольцо соединяется со второй частью корпуса 203, поддерживающей держатель зонда 360, как показано. В частности, когда пьезоэлектрическое кольцо 252 возбуждается, движение передается держателю зонда 360 и, таким образом, соответствующие зонды, установленные в нем, повторяют движение привода 252. Вторая часть корпуса 203 включает наружную часть 254, которая соединена с гибкой диафрагмой 258, направляющей движение соответствующих зондов держателя, а также предварительно нагружает пьезоэлектрическое кольцо 252 и изолирует модуль пьезоэлектрического кольца. Рядом с внутренней частью пьезоэлектрического кольца 252 располагается перемычка 260 (цилиндр), которая имеет выступающий вверх выступ 262, соединенный с Z-датчиком 264 посредством устройства сопряжения 266. Z-датчик 264 определяет движение наконечника зонда, описанного ниже.
Устройство сопряжения 266 может представлять собой, например, лазерный сварной шов. Цилиндр 260 и соответствующий выступ 262 двигаются вместе с пьезоэлектрическим кольцом 252, и пьезоэлектрическое кольцо 252 держателя 360 зонда соединено с пьезоэлектрическим кольцом 252 зонда, поддерживаемым посредством держателя 360 зонда в Z плоскости, определяемой Z-датчиком 264. Другими словами, при активации Z-сканера выступ 262 повторяет движение зонда.
При более подробном рассмотрении датчика 264 отметим, что он включает в себя основание 268, которое соединяется с первой частью корпуса 201 корпуса Z-сканера 110, предпочтительно с помощью винтов 270. Основание 268 датчика 264 также включает в себя встроенный уступ датчика 272, дальний конец которого соединяется с выступом 262 через устройство сопряжения 266.
Когда пьезоэлектрическое кольцо 252 возбуждается и вызывает движение наконечника зонда во время работы, цилиндр 260 перемещается вместе с ним, и это движение передается на уступ датчика 272 через выступ 262, в результате чего уступ 272 движется вместе с ним. Когда это происходит, тензометрические датчики 274, предпочтительно расположенные в конфигурации мостика Уитстона, измеряют соответствующее движение наконечника зонда.
Следовательно, Z-датчик высокого резонансного положения 264 сочетаем с высокорезонансным Z-приводом 110 для максимального увеличения минимальной резонансной частоты подвижных компонентов АСМ. При этом датчик 264 точно измеряет положение наконечника при высоком диапазоне рабочих частот.
Обратите внимание на то, что пьезоэлектрическое кольцо 252 зажато между корпусом сканера 201 и гибкой диафрагмой 258 с узким зазором в 0,004 дюйма между корпусом 201 и диафрагмой 258. Для дальнейшего уменьшения этого зазора желательно использовать винты и прижать диафрагму к корпусу 201. Затем зазор надежно уплотняется, предпочтительно методом лазерной сварки. После устранения зазора пьезоэлектрическое кольцо 252 будет все время находиться в сжатом положении. Эта сила также не позволяет пьезоэлектрическому кольцу 2 52 смещаться из стороны в сторону. Помимо этого, в центре гибкой диафрагмы 258 имеется цилиндрическое кольцо 260 с выступом 262, который сопряжен с датчиком 264. Кроме того, с одной стороны цилиндра 260 подсоединен держатель зонда 360. С противоположной стороны к стенке цилиндра приточен выступ изгиба 262. Выступ 262 также приварен, предпочтительно лазером, к свободному концу уступа датчика 272. Для формирования мостика Уитстона желательно, чтобы к фиксированному концу (основания 268) уступа 274 были подключены четыре тензометрических датчика 274.
В процессе работы пьезоэлектрическое кольцо 252, при возбуждении, толкает цилиндрическое кольцо 260 в центре гибкой диафрагмы 258 и таким образом смещает кантилевер, приводя к тому, что соответствующий наконечник начинает отслеживать поверхность образца в ответ на соответствующие сигналы, касающиеся взаимодействия между зондом и образцом. Выступ изгиба 262 на противоположном конце цилиндрического кольца 260 двигается вместе с наконечником. Это движение выступа 262 отклоняет уступ 272 и создает напряжение на закрепленном конце уступа. Тензометрические датчики 274 измеряют напряжение, которое пропорционально положению наконечника кантилевера. Следует отметить, что, в отличие от известных систем, в которых используются тензодатчики для измерения движения привода, тензометрические датчики 274 не прикреплены к боковой стенке пьезоэлектрического кольца 252. Такое расположение известно недостатком производительности с точки зрения точности, повторяемости, а также негативным влиянием гистерезиса и смещения, воздействие которых снижает качество измерений положения. Датчик 264 выполнен как неотъемлемая часть корпуса 200 Z-сканера 110 и не подвержен подобным недостаткам.
На Фигурах 11-13А более подробно показано жесткое соединение между Z-сканером 110 и быстро сканирующей головкой АСМ 100. Обратимся сначала к Фигуре 11, Z-сканер 110 соединен со свободной концевой частью 107 головки сканера 100. Корпус объектива 107 и центрирующий штифт 160 прикреплены к XY-сканеру (не показан), который установлен внутри головки 100. Чтобы правильно выровнять Z-сканер 110 относительно корпуса объектива 107, штифты 160 Z-сканера 110 вставляют в отверстия, выполненные в закраине 212 верхней поверхности корпуса Z-сканера 200, как описано ранее. Это соединение Z-сканера 110 с корпусом объектива 107 предотвращает вращение Z-сканера на конусном креплении, когда он закреплен. Важно отметить, что эта схема крепления позволяет закреплять и снимать Z-сканер 110 с головки вручную и без использования инструментов, сохраняя при этом точное позиционирование.
На Фигуре 12 более подробно показано коническое крепление между Z-сканером 110 и головкой сканера 100. В частности, внутренняя поверхность 206 корпуса 200 Z-сканера 110 имеет коническую форму и практически симметрична относительно своей центральной оси, что обеспечивает соединение с соответствующей конической поверхностью 300 корпуса объектива 107. Говоря конкретнее, эти сопряженные конические поверхности 206 и 300 включают в себя внутренний конус на корпусе Z-сканера 200 и наружный конус на корпусе 107. Объектив изолируется вдоль нижней линзы. Уплотнительное кольцо 302 образует уплотнение вокруг конических поверхностей следующим образом. Поскольку Z-110 соединен с корпусом 107, уплотнительное кольцо 302, расположенное в кольцевом пазу 304 корпуса объектива 107, скользит вдоль фиксатора 306 во внутренней конической поверхности 300 корпуса Z-сканера 200. Фиксатор 306 позволяет устанавливать уплотнительное кольцо 302 и обеспечивает уплотнение между корпусом 107 и сканером 110. На Фигуре 12А детально рассматривается это устройство сопряжения. Когда Z-сканер 110 вдавливается в корпус объектива 107, уплотнительное кольцо проскальзывает в фиксатор 306 на конической поверхности 300 Z-сканера. Желательно, чтобы поверхность фиксатора 306 имела наклон приблизительно 2°, который не позволит Z-сканеру 110 соскользнуть с конической поверхности корпуса объектива 107, даже если не прикладывать внешние усилия для их удержания.
Хотя уплотнительное кольцо и фиксатор предназначены для соединения и удерживания этих компонентов вместе, Z-сканер 110 желательно удерживать на корпусе объектива 107 силой вакуума. В частности, сила вакуума используется для жесткого закрепления Z-сканера 110 на корпусе объектива 107. Вакуумное отверстие 310 соединено с источником вакуума (не показан) и применяется для приложения силы вакуума к Z-сканеру 110. Так, вакуумное отверстие 310 соединяется с вакуумной диафрагмой 312, приточенной к корпусу объектива 107, которая стягивает полость, образуемую поверхностями 313 и 314 внутренней части Z-сканера 110.
Вакуумное отверстие 310 соединяется с вакуумным переключателем 124 и насосом с помощью соответствующей трубки 122, показанной на Фигуре 4. Когда используется вакуум, перепад давления между давлением внутри соответствующей полости и давлением окружающей атмосферы создает силу, которая удерживает Z-сканер 110 на корпусе объектива 107.
В целом компактный Z-сканер 110 является съемным и может сопрягаться с быстро сканирующей головкой АСМ 100, сохраняя при этом герметичность соединения. Объектив уплотняется вокруг нижней линзы. А уплотнительное кольцо 302 образует уплотнение вокруг конических поверхностей 206, 300, поэтому все отверстия Z-сканера являются воздухонепроницаемыми. В результате между корпусом объектива 107 и Z-сканером 110 поддерживается герметичная полость.
К тому же, со ссылкой на диафрагму 258, симметричный, в форме кольца, изгиб диафрагмы внутри кольцевого привода 252 обеспечивает симметричное движение. Кроме того, функция изгиба 258 способствует отделению движения XY из-за значительно более высокой жесткости кольца диафрагмы при боковом движении.
На Фигурах 13 и 13А более подробно показаны Z-сканер 110 и соответствующий кабель 112, а также держатель зонда 360, соединенный со Z-сканером 110. В частности, кабель 112 соединяется с Z-сканером 110 посредством соединительной платы 350, расположенной между ними для связи между Z-сканером 110 и быстро сканирующей головкой АСМ 100. Подробная схема крепления держателя зонда показана на Фигуре 13А. Изолятор 352 прикреплен к нижней поверхности второй части корпуса 203 корпуса 200 Z-сканера 110. Клин 354 дополнительно соединен с изолятором и обеспечивает выбранную величину наклона для зондирующего устройства, которое удерживается держателем зонда. Зажим зонда 362 является неотъемлемой частью держателя зонда 360 и используется для удержания зондов 364 вплотную к клину 354. В частности, отводящий пьезоэлектрический узел 366 выполнен в полости 367, сформированной в клине 354. Для возбуждения отводящего пьезоэлектрического узла 366 предусматривается соответствующая проводка 368. Поскольку держатель зонда 360 выполнен как неотъемлемая часть сканера 110, предусматривается жесткая конструкция, обладающая гораздо большим резонансом, чем у обычных АСМ.
В целом, согласно Фигуре 13, крепление Z-сканера и компактная конструкция держателя зонда предпочтительных вариантов осуществления изобретения значительно улучшают конструкцию, представлявшую существенные ограничения для системного резонанса. Вместо некоторых известных систем, в которых используется механически нежесткое соединение между держателем зонда и сканером (например, штифты, выступающие вниз из пьезоэлектрической трубки в отверстия держателя зонда), в настоящих предпочтительных вариантах осуществления изобретения конические поверхности 206 и 300 корпуса объектива 107 и Z-сканера 110, соответственно, обеспечивают между ними жесткое механическое соединение. Это жесткое соединение обеспечивается путем поддержания непосредственного контакта значительной площади поверхности Z-сканера 110 с внешней поверхностью свободной концевой части 107. Как показано на Фигуре 12, длина «Q» цилиндрического устройства сопряжения между двумя структурами является существенной, обеспечивая большую площадь поверхности контакта между двумя компонентами, тем самым создавая очень жесткую конструкцию. Это существенно увеличивает способность к резонированию.
Желательно использовать угол конуса α в диапазоне между 15° и 35°, а предпочтительно - около 22°. Фактическая величина конуса в конструкции представляет собой компромисс между простотой в использовании и стабильностью позиционирования Z-сканера 110. Если угол намного меньше 22°, сканер 110 будет удобно снимать вручную и без использования инструментов. Если, с другой стороны, используется угол гораздо больше 22°, положение сканера на конусе будет, вероятно, неточным и нестабильным.
При дальнейшем увеличении скорости работы компактная конструкция держателя зонда 360, жестко соединенного с Z-сканером 110, существенно повысит системный резонанс. На Фигурах 14-17 показан этот компактный и легкий держатель зонда 360. Согласно Фигуре 13, клин 354 соединяется с изолятором 352, который, в свою очередь, соединен с нижней поверхностью Z-сканера 110. В соответствии с Фигурой 14 клин 354 обрабатывается для размещения на нем зажима 362, который используется для удержания зондирующих устройств в клине 354 в процессе эксплуатации. Зажим 362 включает в себя рычаги 37 0, 371, которые соединяются с клином посредством штифтов 372 с возможностью поворота относительно него. Зажим 362 вращается относительно клина 354, поэтому зажим можно открыть, чтобы вставить зонд 364 в клин 354, и закрыть, чтобы прижать зонд 364 вплотную к клину. В частности, зажим 362 включает в себя язычок 390, который предназначен для вставки посередине основания зонда 364 (размещенного в полости, образованной в клине 354), когда зажим 362 закрыт.Зажим 362 закрывается путем такого же вращения в точке «Р», определяемой посредством штифтов 372, и удерживается в закрытом положении с помощью пружинной части 374.
Пружинная часть 374 включает в себя гибкий элемент в форме буквы «S» 376, который отгибается, когда поверхность 377 элемента 376 соприкасается с краем 380 клина 354. Край 380 изогнут, поэтому, когда элемент 376 скользит по краю 380, он отгибается наружу, а затем позволяет части 374 спружинить в сторону клина, чтобы удерживать зажим 362 вплотную к клину 354. В закрытом положении язычок 390 прижимает зонд 364 вплотную к клину 354. В результате получается чрезвычайно компактная и жесткая конструкция держателя зонда, которая устраняет еще одно ограничение для обеспечения максимального резонанса системы АСМ. В целом это сочетание механического клина, прикрепленного к сканеру, предназначенное для размещения компактного зажима 362, который позволяет достичь существенного улучшения самого низкого начального резонанса. Таким образом, реализуется высокая скорость сканирования.
На Фигуре 18 показана динамика Z-сканера. В обычном АСМ участки 400, 404 (амплитуда/фаза) резонансных частотных характеристик Z-сканера показывают начальный резонанс не меньше одного килогерца. В противоположность этому, в АСМ настоящих предпочтительных вариантов осуществления изобретения, которые используют Z-сканер 110, соединенный с быстросканирующей головкой АСМ 100, динамика Z-сканера (участки амплитуды и фазы 402, 406, соответственно) показывает начальную резонансную частоту больше 50 кГц. В результате высокоскоростное сканирование может быть улучшено на коэффициент двадцать пять или более, с использованием предпочтительных вариантов осуществления настоящего изобретения.
Хотя самый лучший метод осуществления настоящего изобретения, предусмотренный изобретателями, раскрывается выше, практика изложенного выше изобретения этим не ограничивается. Будет очевидно, что допускаются различные дополнения, модификации и перестановки функций настоящего изобретения, без отклонения от сути и задачи его основной идеи.
Реферат
Изобретение относится к сканирующей зондовой микроскопии. Сканер содержит корпус сканера, включающего привод и датчик для обнаружения движения сканера. Корпус сканера выполнен с возможностью съема с головки вручную и имеет общий объем менее приблизительно пяти кубических дюймов. При этом корпус имеет первый открытый конец для подключения сканера к свободной концевой части головки, имеющей внешнюю поверхность, выступающую в сторону образца, и второй закрытый конец, на котором расположен держатель зонда, а также внутреннюю поверхность, проходящую между первым и вторым концами. Внешняя и внутренняя поверхности имеют одинаковую коническую форму и совпадают друг с другом. Технический результат - повышение жесткости конструкции сканера. 2 н. и 16 з.п. ф-лы, 20 ил.
Формула
где корпус имеет а) первый открытый конец для подключения сканера к свободной концевой части головки СЗМ, имеющей внешнюю поверхность, выступающую в сторону образца, и б) второй закрытый конец, на котором расположен держатель зонда, а также внутреннюю поверхность, проходящую между первым и вторым концами, и где внешняя и внутренняя поверхности имеют одинаковую коническую форму и совпадают друг с другом.
обеспечение сканера, включающего корпус, имеющий общий объем меньше чем приблизительно пять кубических дюймов, а также имеющий а) первый открытый конец для подключения сканера к свободной концевой части головки СЗМ, имеющей внешнюю поверхность, выступающую в сторону образца, и б) второй закрытый конец с расположенным на нем держателем зонда, а также внутреннюю поверхность, проходящую между первым и вторым концами, и где внешняя и внутренняя поверхности имеют одинаковую коническую форму и совпадают друг с другом, и поддерживающего зондирующее устройство;
крепление сканера к головке вручную, не требующее использование инструментов;
и эксплуатацию АСМ.
Комментарии