Способ формирования изображения в сканирующей зондовой микроскопии - RU2698953C2
Код документа: RU2698953C2
Чертежи







Описание
Изобретение относится к области сканирующей зондовой микроскопии, преимущественно к атомно-силовой микроскопии.
Оно может быть использовано, например, для измерения размеров нанообъектов и рельефа поверхностей образца, имеющих перепад высот нанометрового диапазона, а также фазового контраста, контраста латеральных сил и поверхностной проводимости нанообъектов.
Известен способ измерения рельефа поверхности для сканирующего зондового микроскопа, в котором сканирование осуществляют иглой зонда по заданной траектории, данные регистрируются при прямом и обратном проходе, а для формирования сигнала, управляющего перпендикулярными поверхности образца перемещениями, используют массив значений управляющего сигнала, снятый на предыдущей строке сканирования [1].
Недостатком этого способа является то, что при сканировании тех мест, где рельеф имеет крутизну склонов больше критической, например, на склонах наночастиц, происходит отрыв иглы зонда от поверхности образца. Двигаясь после этого над поверхностью образца по снижающейся траектории, игла зонда достигает поверхности вдали от точки отрыва. Такое движение зонда над поверхностью описано в литературе по зондовой микроскопии как явление "парашютирования" [2]. В результате в местах парашютирования зонда на изображении рельефа образуются дефекты, проявляющиеся в виде сильно вытянутых участков треугольной формы, ориентированных острым углом в сторону движения образца и напоминающих по форме кому или "затяжки". Чтобы избежать таких дефектов, приходится или уменьшать скорость сканирования или устранять эти дефекты с помощью программ обработки изображений, например, путем ретуширования или фильтрации после завершения регистрации изображения. В первом случае это приводит к увеличению времени регистрации изображения, а во втором - к искажению получаемых данных о рельефе и уменьшению достоверности получаемых данных о рельефе.
Второй недостаток заключается в том, что способ не устраняет влияние рельефа на изображение таких сигналов, как смещение фазы, латеральной силы и тока растекания, что приводит к уменьшению контраста тех участков поверхности, которые отличаются своими физико-химическими свойствами от остальной части поверхности, и повышает вероятность неправильной интерпретации полученных результатов.
Первый технический результат предлагаемого изобретения заключается в том, что на изображениях рельефа устраняются так называемые дефекты "парашютирования", связанные с отрывом иглы зонда от поверхности образца, что повышает достоверность получаемых данных о рельефе и позволяет избежать уменьшения скорости сканирования, тем самым уменьшая время регистрации изображения.
Второй технический результат заключается в том, что устраняется искажение на изображениях фазового контраста и сигнала латеральных сил, вызванное влиянием рельефа поверхности образца. Это повышает контрастность на изображениях фазового контраста и сигнала латеральных сил тех участков поверхности, которые отличаются по своим физико-химическим свойствам, что уменьшает вероятность ошибочной интерпретации полученных результатов. Дополнительным техническим результатом применения заявляемого изобретения для обработки изображения сигнала латеральных сил является устранение паразитной периодической структуры, обусловленной интерференцией лазерного излучения, отраженного от поверхности зонда и образца.
Третий технический результат заключается в том, что на изображении тока растекания ослабляется влияние рельефа, что повышает достоверность получаемых данных.
Указанные технические результаты достигаются тем, что в способе формирования изображения в сканирующей зондовой микроскопии, включающем построчное сканирование поверхности образца в прямом и обратном направлениях и регистрацию сигналов Sƒ и Sb, соответствующих сигналу S при сканировании каждой строки в прямом и обратном направлениях, значениям которого соответствуют две матрицы чисел Sƒi,j и Sbi,j, являющиеся матрицами изображений и описывающие попиксельно изображение, как минимум, одну строку матрицы изображения Si,j сигнала S формируют последовательностью процедур, включающих сдвиг элементов, как минимум, одной из матриц сигнала S вдоль направления сканирования, относительно элементов другой матрицы, на величину ΔХ, при котором, по меньшей мере, на части, по меньшей мере, одной строки происходит совмещение сигналов Sƒ и Sb, измеренных при движении в прямом и обратном направлениях, и вычисление, по меньшей мере, одной строки матрицы изображения Si,j по формуле:

где Sƒi,j, Sbi,j - матрицы изображений сигнала S, измеренного, соответственно, в прямом и обратном направлениях сканирования,
F(Sƒi,j, Sbi,j) - функция сигналов Sƒ, Sb, вид которой определяется типом сигнала S.
Существует вариант, в котором изображение сигнала S формируют после сканирования всех строк изображения в прямом и обратном направлениях.
Существует также вариант, в котором в качестве сигнала S используют сигнал высоты рельефа поверхности образца Н, а функция F{Hƒi,j, Hbi,j) имеет вид:

Существует также вариант, в котором в качестве сигнала S используют сигнал фазового контраста/5, а функция F{Pƒi,j, Рbi,j)имеет вид:

Существует также вариант, в котором в качестве сигнала S используют сигнал латеральной силы L, а функция F(Lƒi,j, Lbi,j) имеет вид:

Существует также вариант, в котором в качестве сигнала S используют сигнал тока I при измерении проводимости образца, а функция F(Iƒi,j, Ibi,j) имеет вид:

Существует также вариант, в котором совмещение сигналов Sƒ, Sb, измеренных в прямом и обратном направлениях, осуществляют по первой строке изображения.
Существуют также варианты, в которых величину сдвига ΔХ определяют по характерным точкам сигналов Sƒ и Sb, или по смещению относительно начала координат главного максимума кросс-корреляционной функции сигналов Sƒ и Sb, или по смещению относительно начала координат главного максимума кросс-корреляционной функции сигналов Sƒ и Sb после их фильтрации, или после планаризации сигналов Sƒ и Sb, или по положению экстремума функциональной зависимости среднего значения модуля разности |Sf-Sb| от сдвига ΔХ, или по положению экстремума функциональной зависимости средне-квадратичной разности сигналов Sf и Sb от сдвига ΔХ, или по сигналам высоты рельефа Hf и Нb, или по сигналам ошибки обратной связи при сканировании в прямом и обратном направлении.
Принцип работы алгоритма коррекции изображений поясняется на фиг. 1-11.
На фиг. 1 изображена принципиальная схема сканирующего зондового микроскопа.
На фиг. 2 изображена схема движения зонда относительно поверхности образца при сканировании.
На фиг. 3 показан профиль рельефа поверхности образца, измеренный при сканировании в прямом и обратном направлении и сдвиг между ними.
На фиг. 4 изображен профиль сигнала высоты рельефа с дефектом парашютирования, вызванного отрывом зонда от поверхности образца, и процедура его коррекции,
На фиг. 5 изображен профиль сигнала сдвига фазы колебаний зонда и процедура коррекция профиля.
На фиг. 6 изображен профиль сигнала латеральных сил и процедура его коррекции.
На фиг. 7 изображен профиль сигнала тока растекания и процедура его коррекции.
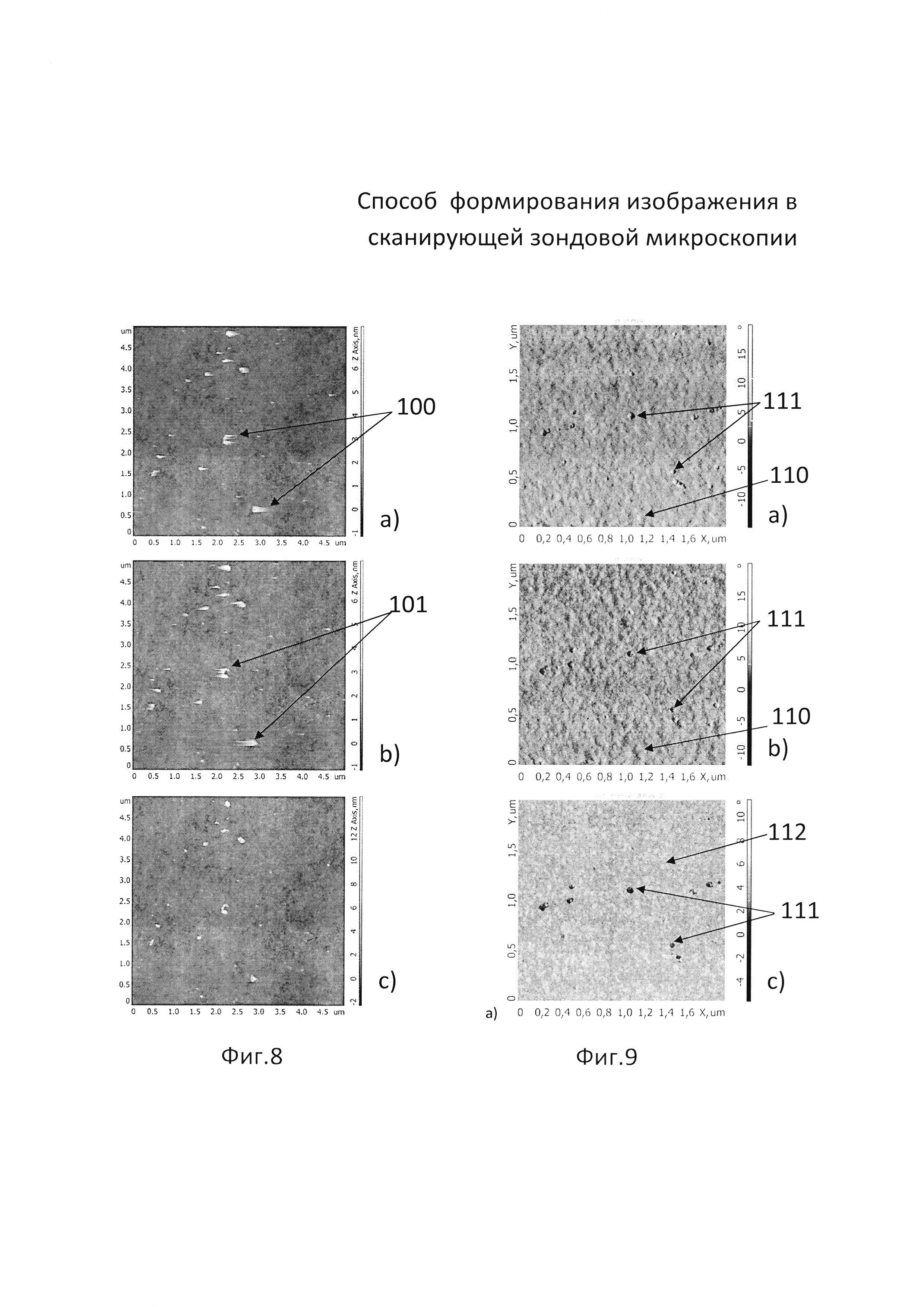
На фиг. 8 показаны изображения рельефа при сканировании в прямом и обратном направлении с дефектами парашютирования и изображение рельефа после применения процедуры коррекции.
На фиг. 9 показаны изображения фазового контраста при сканировании в прямом и обратном направлениях и изображение после применения процедуры коррекции.
На фиг. 10 показаны изображения сигнала латеральных сил при сканировании в прямом и обратном направлениях и изображение после применения процедуры коррекции.
На фиг. 11 показаны изображения сигнала тока растекания при сканировании в прямом и обратном направлениях и изображение после применения процедуры коррекции.
Принципиальная схема сканирующего зондового микроскопа, представленная на фиг. 1, включает сканер 1, зонд 2, лазер 3, четырех секционный фото детектор 4 и образец 5, который закреплен на сканере 1. Сканер 1 обеспечивает перемещение образца 5 по осям X, Y и Z. Кроме того, в сканирующем зондовом микроскопе имеется контроллер для управления прибором и компьютер с соответствующей управляющей программой, которые не показаны на фиг. 1. Датчиком высоты рельефа образца 5 и других сигналов, характеризующих его свойства, является зонд 2, представляющий собой чип с упругой консолью 6 и острой иглой 7 на конце. В зависимости от режима сканирования игла 7 может находиться в постоянном контакте с поверхностью образца 5 (контактный режим), либо в колебательном режиме, когда конец упругой консоли 6 с иглой 7 совершает колебательное движение вблизи поверхности образца 5 (полуконтактный режим или "теппинг" мода сканирования). Изгиб упругой консоли 6 в случае контактного способа сканирования или амплитуда ее колебаний в случае "теппинга" регистрируется четырех секционным фотодетектором 4, на который падает отраженный от поверхности упругой консоли 6 луч лазера 3.
На фиг. 2 показана схема движения зонда 2 при сканировании поверхности образца 5. При сканировании строки 10 вдоль оси X сигнал высоты рельефа Н или другого сигнала S регистрируется при движении образца 5 как в прямом 11, так и обратном 12 направлении. Регистрация сигналов происходит в каждом пикселе 13. После возврата в начало строки образец 5 смещают по оси Y в начало следующей строки 14. В результате формируются матрицы изображений Hƒi,j и Hbi,j сигнала Н, соответствующие движению образца 5 в прямом 11 и обратном 12 направлениях. Аналогичным образом происходит регистрация других сигналов S и формирование их матриц изображений Sƒi,j и Sbi,j. При этом каждая строка матрицы описывает профиль соответствующей строки изображения сигнала S.
Изображения рельефа, построенные по матрицам Hƒi,j и Hbi,j, как правило, бывают сдвинуты относительно друг друга на некоторое расстояние ΔХ вдоль направления сканирования. На фиг. 3 это показано на примере профиля одной строки сигнала высоты рельефа Hi,j при сканировании в прямом 20 и обратном 21 направлениях. При этом между профилями может возникнуть сдвиг на величину ΔХ из-за нелинейных свойств сканера 1 и конечного времени его реакции на сигнал обратной связи.
При коррекции изображений сигналов по предлагаемым алгоритмам с использованием матриц изображений, измеренных в прямом и обратном направлении сканирования, необходимо перед этим совместить изображения, для чего нужно определить величину сдвига ΔХ. Способы определения величины сдвига ΔХ описываются ниже.
При сканировании изображений рельефа поверхности образца 5, а также других его свойств могут возникать искажения изображений, вызванные неоптимальным режимом сканирования или влиянием на измеряемый сигнал динамики отработки сканером 1 рельефа поверхности образца 5 [3]. Действительно, при сканировании образца 5 параметры сканирования (значения коэффициента усиления обратной связи и рабочей точки, скорость сканирования и др.) настраиваются таким образом, чтобы сканер 1 как можно точнее отрабатывал рельеф поверхности с помощью системы обратной связи сканирующего зондового микроскопа, поддерживая постоянным среднее расстояние иглы 7 зонда 2 до поверхности образца 5. Однако, система обратной связи, в качестве которой обычно используется ПИД контроллер, работает с определенной динамической ошибкой, которая зависит от указанных выше параметров сканирования и ограничена рабочей характеристикой зонда 2 по абсолютной величине. Ошибка обратной связи, обусловленная конечным временем реакции системы обратной связи, модулирует расстояние иглы 7 зонда 2 до поверхности образца 5, вызывая тем самым модуляцию взаимодействия иглы 7 с поверхностью образца 5. В результате измеряемые сигналы будут также модулированы пропорционально ошибке обратной связи. Кроме того, часто бывает так, что на рельефе имеются участки с существенно более крутыми склонами, на которых может возникнуть отрыв зонда 2 от поверхности образца 5. В результате этого сигнал ошибки достигнет насыщения и остается постоянным, не зависящим от реального рельефа, до тех пор, пока игла 7 зонда 2 не придет в соприкосновение с поверхностью образца 5 в результате отработки сканером этой ошибки. Отработка рельефа в период отрыва зонда от поверхности происходит в режиме, так называемого "парашютирования". В этих местах на изображении рельефа возникает характерный дефект, проявляющийся, соответственно, в виде комы. Для того, чтобы избежать этого дефекта, как правило, требуется уменьшить скорость сканирования и увеличить прижим зонда к поверхности. Это приводит к увеличению времени сканирования и давления зонда на образец, что не всегда желательно.
Таким образом, по причине, описанной выше, даже в отсутствие эффекта парашютирования динамическая ошибка ПИД контроллера приводит к тому, что на изображениях фазового контраста, латеральных сил, тока растекания, а также других сигналов, величина которых зависит от расстояния зонда до поверхности образца 5, будет проявляться влияние рельефа, которое искажает или маскирует зависимость этих параметров от свойств материала поверхности.
Так, например, на изображении фазового контраста профиль сигнала сдвига фазы будет отображать в первом приближении профиль производной

На величину тока растекания также значительно влияет динамика сканирования. Действительно, величина тока существенным образом зависит от площади контакта проводящей иглы 7 и поверхности образца 5. Из-за конечной скорости реакции обратной связи и связанной с этим вариацией давления иглы 7 на поверхность образца 5 площадь контакта будет большей при движении иглы 7 вверх по склону рельефа, чем при движении вниз. Это приводит к тому, что измеряемая величина тока будет зависеть от направления сканирования. Действительно, при движении слева направо (прямое направление) более проводящими окажутся левые склоны рельефа, а при сканировании справа налево (обратный ход) - правые. Очевидно, что такие данные искажают действительную карту распределения проводящих свойств образца 5.
Величина сигнала латеральных сил зависит от силы трения иглы 7 о поверхность образца 5, что в свою очередь определяется силой прижима иглы 7 к поверхности, коэффициентом трения и силой адгезии между иглой 7 и поверхностью образца 5 [4]. При измерении сигнала латеральной силы давление иглы 7 по нормали к плоскости образца 5 поддерживается постоянным системой обратной связи. Однако, сила трения в точке контакта иглы 7 с поверхностью будет зависеть от угла наклона профиля рельефа. Результирующий момент сил, действующий на зонд 2 и определяющий сигнал латеральных сил, в некотором приближении также как и для сигнала сдвига фазы, пропорционален производной от профиля рельефа. Это позволяет использовать данный факт для ослабления паразитного влияния рельефа и выделения тех участков поверхности, которые отличаются по силе трения или адгезионным свойствам.
Дополнительным фактором, который влияет на сигнал латеральных сил, является интерференция лазерного излучения, которая возникает при отражении от поверхности зонда 2 и образца 5. Она проявляется в виде периодической структуры и не зависит от направления сканирования.
Все вышеописанные артефакты искажают или маскируют информацию об объекте исследования. Учитывая их природу и связь с динамикой отработки сканером 1 рельефа, они могут быть устранены или их влияние на измеряемый сигнал S уменьшено путем выполнения операции совмещения профилей Sƒ и Sb сигнала S, измеренных в прямом и обратном направлении сканирования, и последующем суммировании этих профилей и вычитании из полученной суммы заданной функции F(Sƒ, Sb), зависящей от типа сигнала S.
Техническим результатом такой коррекции является то, что на изображениях рельефа устраняются, так называемые, дефекты "парашютирования", связанные с отрывом иглы 7 зонда 2 от поверхности образца 5; дополнительно на изображении сигнала сдвига фазы устраняется или существенно уменьшается контраст, вызванный влиянием рельефа, что уменьшает вероятность неправильной интерпретации фазового контраста; на изображении латеральных сил устраняется паразитная периодическая структура, обусловленная интерференцией лазерного излучения, и искажение, вызванное влиянием рельефа поверхности образца 5, что повышает контрастность на изображении латеральных сил тех участков поверхности, которые отличаются по своим физико-химическим свойствам; на изображении тока растекания ослабляется влияние рельефа, что повышает достоверность получаемых данных. Кроме того, возможность устранять дефекты, вызванные эффектом парашютирования, позволяет сканировать со скоростью в 1.5-2 раза быстрее, чем при тех же параметрах сканирования, но без отрыва зонда 2 от поверхности образца 5 и тем самым уменьшить время регистрации изображения.
Алгоритм коррекции изображений поясняется на фиг. 4-8, а примеры применения показаны на фиг. 9-11.
На фиг. 4 представлен схематичный профиль сигнала высоты рельефа с дефектом, возникающим при отрыве зонда 2 от поверхности образца 5, и процедура его коррекции. На данном рисунке в качестве примера показан профиль рельефа 30, который имеет выпуклость с левым 31 и правым 32 склоном. При сканировании слева направо (прямое направление сканирования) левый склон 31 будет восходящим, а правый 32 -нисходящим. При движении справа налево (обратное направление сканирования) - наоборот: правый склон 32 - восходящий, левый 31 -нисходящий. При сканировании с оптимально настроенными параметрами сканирования игла 7 зонда 2 независимо от направления движения следует за поверхностью образца по оси Z, не отрываясь от нее на нисходящем склоне и повторяя профиль рельефа 30. Однако, если крутизна склона превышает некоторое критическое значение для данной скорости движения образца 5, то при сканировании в прямом направлении игла 7 зонда 2 будет формировать профиль 33, на котором зонд 2 будет правильно отслеживать левый, восходящий склон рельефа 31 и отрываться на нисходящем склоне 32, двигаясь по траектории 34 и создавая искаженное изображение рельефа. При движении в обратном направлении зонд 2 будет формировать профиль 35. Теперь правый склон 32 становится восходящим и правильно отслеживается сканером в то время, как на левом склоне 31 зонд будет двигаться по траектории 36. Искажение регистрируемого рельефа проявляется в виде комы или "затяжек " на изображении тех участков поверхности, где происходит отрыв зонда от поверхности образца 5.
Заявляемый алгоритм корректировки изображения позволяет восстановить правильную форму рельефа, если имеются данные сканирования сигнала высоты рельефа Н в прямом и обратном направлениях. Перед тем как применить корректировку необходимо, однако, определить величину смещения ΔХ изображений рельефа, измеренных при прямом и обратном направлениях сканирования, и, если ΔХ≠0, совместить их. Способы определения величины смещения ΔХ описаны ниже. После совмещения изображений вычисляется матрица откорректированного изображения по формуле:

где

На примере профилей 33 и 35 это преобразование выглядит следующим образом. Первый член формулы в квадратных скобках суммирует профили рельефа 33 и 35, в результате чего получаем профиль 37. Он является суммой как неискаженной, так и искаженной части профиля рельефа. Второе слагаемое выделяет только искаженную часть рельефа 38. Полуразность профилей 37 и 38 дает искомую неискаженную форму рельефа 39.
Восстановление формы рельефа можно производить как во время сканирования, так и после завершения сканирования всего изображения в целом. В первом случае каждая строка преобразуется по указанному алгоритму после завершения ее сканирования в прямом и обратном направлениях и сохранение уже откорректированных данных. Также возможен вариант, когда обработка ведется не каждой строки, а после сканирования группы строк с заданным количеством строк в одной группе. При восстановлении формы рельефа после завершения сканирования образца 5 описанная процедура применяется к полным матрицам изображений Hƒi,j и Hbi,j и может быть выполнена с использованием программы обработки изображений.
Техническим результатом применения данной процедуры коррекции изображения сигнала высоты рельефа Н является то, что на изображениях рельефа устраняются так называемые дефекты "парашютирования", связанные с отрывом иглы 7 зонда 2 от поверхности образца 5, что повышает достоверность получаемых данных о рельефе, и предоставляется возможность работать при более высокой скорости сканирования, что приводит к уменьшению времени регистрации изображения.
На фиг. 5 показана последовательность действий при коррекции изображения фазового контраста при условии, что при сканировании зонд 2 не отрывается от поверхности образца 5. В качестве примера рассмотрим сигнал фазового контраста при сканировании поверхности образца 40, которая имеет особенность рельефа в виде выпуклости 41 и область 42, где материал образца 5 имеет другие вязкоупругие или адгезионные свойства. Известно [4], что сдвиг фазы колебаний зонда 2 относительно фазы возбуждающего воздействия, раскачивающего упругую консоль 6 зонда 2, при взаимодействии с поверхностью определяется отношением рабочей амплитуды колебаний консоли 6 зонда 2 к амплитуде ее свободных колебаний и величиной потерь колебательной энергии при взаимодействии иглы 7 зонда 2 с поверхностью:

где ϕ - сдвиг фазы, ω и ω0 - соответственно, частота возбуждения и резонансная частота зонда 2, Asp - рабочая амплитуда колебаний зонда 2, А0- амплитуда свободных колебаний, k - упругая жесткость консоли 6 зонда 2 и Edis - энергия диссипации колебательной энергии зонда 2. Из-за конечной скорости реакции обратной связи по оси Z рабочая амплитуда Asp не остается постоянной во время сканирования, а варьирует вокруг заданного значения, причем ее отклонение от него пропорционально крутизне рельефа. Поэтому фазовый контраст будет иметь составляющую 43 или 44, связанную с рельефом поверхности (первое слагаемое в формуле (2), и составляющую 45, обусловленную потерями, вызванными взаимодействием с поверхностью (второе слагаемое в (2)). Первое слагаемое в хорошем приближении пропорционально производной от профиля рельефа по координате X и не зависит от свойств материала поверхности и поэтому не несет полезной информации относительно гетерогенности свойств поверхности, если таковая присутствует. Однако, его знак относительно базового уровня зависит от направления сканирования. В тоже время второе слагаемое существенно зависит от свойств поверхности, и будет давать фазовый контраст на тех участках, где есть материал с другими механическими, вязкоупругими или адгезионными свойствами. При этом он может существенно маскироваться фазовым контрастом, вызванным рельефом поверхности и описываемым первым слагаемым. Учитывая то обстоятельство, что сигнал сдвига фазы, связанный с рельефом, зависит от направления сканирования и имеет антисимметричную форму (профили 43, 44), их сложение компенсирует эту составляющую, оставляя только часть, ответственную за разные свойства поверхности 46.
Описанная процедура имеет следующее представление в математической форме:

где Pƒi,j, Pbi,j - матрицы сигнала фазового сдвига в прямом и обратном направлении сканирования.
Техническим результатом применения данной процедуры коррекции изображения фазового контраста Р является устранение или существенное ослабление влияния рельефа на его на изображение и увеличение контраста, обусловленного различием физико-химических свойств участков поверхности, что уменьшает вероятность ошибочной интерпретации фазового контраста.
На фиг. 6 показаны профиль рельефа 70 и профили сигнала латеральных сил на разных стадиях коррекции изображения сигнала латеральных сил. Измерение латеральных сил осуществляется в контактном режиме сканирования, когда игла 7 зонда 2 скользит по поверхности образца 5, испытывая при этом силу трения. Сила трения создает момент кручения вокруг продольной оси консоли 6, угол поворота которого измеряется как сигнал латеральных сил. Именно получение информации о силах трения является одной из основных целей измерения сигнала латеральных сил. Однако, эта информация маскируется другими факторами, которые влияют на величину сигнала латеральных сил. К ним относятся влияние рельефа поверхности и интерференции лазерного пучка света, отраженного от поверхности образца 5 и консоли 6.
На фиг. 7 поясняется, как компенсируется влияние рельефа на профиль сигнала латеральных сил. Рельеф образца имеет возвышение 70 со ступенчатыми границами и область 71 с другим коэффициентом трения. При движении вправо (прямое направление) профиль сигнала латеральных сил 72 будет иметь область 73 с другим уровнем сигнала и скачкообразное изменение сигнала 74 и 75 на границах рельефа. При обратном движении, слева направо скачки сигнала 78 и 79 на профиле сигнала латеральных сил 76 имеют тот же самый вид, тогда как в области 71 сигнал латеральных сил 77 будет иметь противоположный знак. Вычитание профиля 76 из профиля 72 дает профиль 80, в котором остается только область 81 с другим коэффициентом трения.
Интерференция лазерного излучения может наблюдаться на гладких образцах и проявляться в виде периодических полос на изображении сигнала латеральных сил. Положение и интенсивность этих полос не зависит от направления сканирования и устраняется так же путем вычитания изображений, измеренных в прямом и обратном направлениях сканирования.
Формула для коррекции матрицы изображения латеральных сил имеет вид:


где Lƒi,j, Lbi,j - матрицы изображений сигнала латеральных сил, измеренных при прямом и обратном направлении сканирования.
Технический результат применения данной процедуры коррекции изображения сигнала латеральных сил заключается в том, что на изображении латеральных сил устраняется искажение сигнала латеральных сил, вызванное влиянием рельефа поверхности образца 5, а также устраняется паразитная периодическая структура, обусловленная интерференцией лазерного излучения, отраженного от поверхности зонда 2 и образца 5, что повышает контрастность на изображении латеральных сил тех участков поверхности, которые отличаются по своим физико-химическим свойствам, и тем самым уменьшает вероятность ошибочной интерпретации полученных данных.
На фиг. 7 поясняется коррекция влияния рельефа на профиль сигнала тока растекания. Поверхность образца 5 имеет проводящий участок поверхности, обладающий рельефом в виде выпуклости с левым 91 и правым 92 склонами. При движении в прямом направлении (профиль 93) сигнал тока имеет большее значение на восходящем участке рельефа 91, расположенном слева, и меньшее на нисходящем 92 справа. Тоже самое происходит и при движении в обратном направлении, но теперь восходящий и нисходящий склоны поменялись местами (профиль 94). Такое поведение тока связано, как описывалось ранее, с изменением силы прижатия зонда 2 к поверхности на восходящем и нисходящем склонах рельефа из-за динамики его движения. Очевидно, что при гладком рельефе проводимость должна быть однородной на всем проводящем участке. Для того, чтобы скорректировать и сделать более слабым влияние рельефа на распределение тока необходимо для каждого пикселя изображения результирующего распределения делать выборку максимального значения тока из пары значений, полученных при прямом и обратном направлении сканирования. Для этого складывая профили 93 и 94, получаем профиль 95. Модуль разности профилей 94 и 95 дает профиль 96, который дополняет профиль 95 до максимальных значений в каждом пикселей. Таким образом, сумма профилей 95 и 96 дает удвоенное значение профиля тока без влияния рельефа. В математической форме коррекция изображения тока растекания 1ц имеет следующий вид:


где Iƒi,j, Ibi,j - матрицы изображений сигнала тока растекания, измеренных при прямом и обратном направлении сканирования.
Технический результат применения данной коррекции заключается в том, что на изображении тока растекания ослабляется влияние рельефа, что повышает достоверность получаемых данных.
Как указывалось выше, перед применением процедуры коррекции изображения необходимо произвести совмещение изображений, полученных при сканировании в прямом и обратном направлениях, для чего необходимо определить величину сдвига ΔХ между ними. Определение величины сдвига можно проводить по одной строке, группе строк или по всему изображению сигнала S. Для этой цели можно использовать любой регистрируемый сигнал, однако, предпочтительно использовать сигнал высоты рельефа Н или сигнал ошибки обратной связи по оси Z ε, определяемый как разность величины рабочей амплитуды Mag колебаний зонда 2 и амплитуды сравнения в рабочей точке SP при сканировании в полуконтактном режиме: ε=Mag-SP. В контактном режиме ε=DFL-SP, где DFL - сигнал изгиба зонда, SP - значение DFL в рабочей точке обратной связи.
Наиболее простой способ определения ΔХ - это измерить величину сдвига по характерным точкам на профиле рельефа или другом сигнале, как это показано на фиг. 3.
В другом способе для определения ΔХ вычисляется кросскорреляционная функция сигналов Sƒ и Sb, используя любые строки, группы строк или все строки матриц Sƒi,j и Sbi,j. Смещение максимума кросскорреляционной функции относительно начала координат равно смещению ΔХ. При этом изображения сигналов Sƒ и Sb, от которых вычисляется кросскорреляционная функция, предварительно может быть подвергнута планаризации и известными способами отфильтрована.
В другом способе величина сдвига изображений ΔХ определяется по положению экстремума функциональной зависимости среднего значения модуля разности сигналов Sƒ и Sb в зависимости от ΔХ.
В другом способе величина сдвига изображений ΔХ определяется по положению экстремума функциональной зависимости среднеквадратичной разности сигналов Sƒ и Sb в зависимости от ΔХ.
Техническим результатом всех указанных выше методов определения величины сдвига изображений ΔХ сигнала S, измеренных в прямом и обратном направлении сканирования, является вычисление величины ΔХ.
Примеры применения заявляемого алгоритма корректировки изображений продемонстрированы на фиг. 8-11. На фиг. 8а и 8b показаны изображения рельефа поверхности стекла при сканировании, соответственно, в прямом и обратном направлениях. Области 100 и 101 являются примером дефектов, вызванных эффектом парашютирования. Они выглядят как комы, вытянутые в направлении сканирования, и на изображении их наблюдается более двух десятков. После применения процедуры корректировки (фиг. 8с) комы или "затяжки" исчезли и частицы приобрели нормальный вид с четкими краями.
На фиг. 9а и 9b показаны изображения сигналов смещения фазы соответственно, для прямого и обратного направлений сканирования поверхности прозрачного проводящего покрытия из окиси индия и олова, ITO на стекле. На изображениях видна мелкая текстура 110, обусловленная рельефом ITO и отдельных частиц 111, а также образования, связанные с наличием областей, отличающихся величиной потерь колебательной энергии зонда из-за различия свойств поверхности, но трудно различимые на фоне текстуры от рельефа. Применение процедуры коррекции по формуле (3) приводит к устранению текстуры, связанной с влиянием рельефа и проявлению контраста изображения, связанного с различием свойств поверхности 112 (фиг. 9с).
На фиг. 10 показан пример применения коррекции к изображению сигнала латеральной силы. На фиг. 10а и 10b представлены, соответственно, изображения сигнала латеральной силы при сканировании в прямом и обратном направлении образца стекла с нанесенным слоем сплава окиси индия и олова, ITO. Видно, что контраст изображения, обусловленный влиянием рельефа, полностью маскирует область, которая отличается по своим фрикционным или адгезионным характеристикам от другой части поверхности. Применение процедуры коррекции приводит к существенному ослаблению влияния рельефа и выявлению этой скрытой области 120 (фиг. 10с).
На фиг. 11 показан пример корректировки изображения сигнала тока. Измерялась поверхностная проводимость стекла, покрытого проводящим слоем сплава окиси индия и олова, ITO. Рельеф имеет зернистую текстуру, обусловленную нанокристаллами ITO. На фиг. 11а изображение получено при сканировании в прямом направлении, а на фиг. 11b - в обратном. Распределение тока по поверхности имеет островковый характер. Размер островков и их положение коррелирует с размером и положением зерен нанокристаллов. При этом островки проводимости разделены областями, которые выглядят как плохо проводящие и ширина которых зависит от направления сканирования. Кроме того, в пределах островков наблюдается неоднородность проводимости, которая также зависит от направления сканирования. Так, например, области 130 на фиг. 11а и 131 на фиг. 11b имеют меньшую проводимость по сравнению с теми же участками при сканировании в противоположном направлении. Эти области выглядят более темными по сравнению с соответствующими им сопряженными участками при противоположном направлении сканирования. Применение корректировки согласно формуле (5) делает распределение тока по поверхности образца более однородным, а границы между островками более тонкими. Таким образом, непроводящие области оказываются существенно меньшего размера, чем это кажется только на основании изображений фиг. 11а или 11b.
Литература
1. Быков В.А., Быков А.В., Котов В.В., Маловичко И.М., Остащенко А.Ю., Леесмент С.И., "Способ ускорения измерения рельефа поверхности для сканирующего зондового микроскопа". // Патент RU 2428655 от 07.10.2009.
2. Toshio Ando "High speed atomic force microscopy coming age ", Nanotechnology 23 (2012), p. 1-27.
3. Миронов В.Л., "Основы сканирующей зондовой микроскопии", г. Москва, Техносфера, 2009, 144 с.
4. Wang Н., Gee Ml, "AFM lateral force calibration for an integrated probe using a calibration grating", Ultramicroscopy 136 (2014) p. 193-200.
5. Garcia R., Perez R., "Surface Science Reports", 47 (2002), 197-301.
Реферат
Изобретение относится к области сканирующей зондовой микроскопии, преимущественно к атомно-силовой микроскопии. Сущность изобретения заключается в том, что в способе формирования изображения в сканирующей зондовой микроскопии, включающем построчное сканирование поверхности образца в прямом и обратном направлениях и регистрацию сигналов Sи S, соответствующих сигналу S при сканировании каждой строки в прямом и обратном направлениях, значениям которого соответствуют две матрицы чисел Sƒи Sb, являющиеся матрицами изображений и описывающие попиксельно изображение, как минимум одну строку матрицы изображения Sсигнала S формируют последовательностью процедур, включающих сдвиг элементов как минимум одной из матриц сигнала S вдоль направления сканирования, относительно элементов другой матрицы, на величину ΔХ, при котором по меньшей мере на части по меньшей мере одной строки происходит совмещение сигналов Sи S, измеренных при движении в прямом и обратном направлениях, и вычисление по меньшей мере одной строки матрицы изображения Sпо формуле:где Sƒ, Sb- матрицы изображений сигнала S, измеренного соответственно в прямом и обратном направлениях сканирования, F(Sƒ, Sb) - функция сигналов S, S, вид которой определяется типом сигнала S. Технический результат изобретения заключается в повышении скорости сканирования и достоверности получаемых данных. 14 з.п. ф-лы, 11 ил.
Формула





Комментарии