Система и способ позиционирования - RU2605816C2
Код документа: RU2605816C2
Чертежи




















Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе позиционирования и, в частности, к способу и системе для устройств нанопозиционирования.
Изобретение предназначено прежде всего для использования в системе или устройстве нанопозиционирования и ниже описано в рамках этого приложения. Однако очевидно, что изобретение не ограничено этой конкретной областью применения. В частности, изобретение также применимо к системам, устройствам и способам позиционирования, в которых требуются прецизионные перемещения объекта, установленного в системе или устройстве позиционирования.
УРОВЕНЬ ТЕХНИКИ
Ниже приведено описание современного уровня техники для того, чтобы представить изобретение в контексте соответствующих технических решений и показать его значение. Однако, если явно не сказано обратное, ссылку на любое известное техническое решение в этом разделе не следует понимать как утверждение, что такое техническое решение широко известно или является частью общих знаний в данной области техники.
Системы и устройства нанопозиционирования используются для точных механических перемещений с точностью, часто достигающей атомарных размеров. Такие системы и устройства включают устройства для совмещения волокон, лучевые сканеры и платформы для бокового позиционирования. Другие приложения устройств нанопозиционирования в нанотехнологии включают сканирующую зондовую микроскопию (SPM, scanning probe microscopy), сканирующую туннельную микроскопию (STM, scanning tunneling microscopy), атомно-силовую микроскопию (AFM, atomic force microscopy), системы с использованием нанотехнологии, высокоточную механическую обработку, оптическое переключение и исследование физиологии клеток.
Благодаря своей высокой жесткости, компактности и практически бесконечной разрешающей способности пьезоэлектрические приводы широко используются в приложениях, относящихся к нанопозиционированию, для обеспечения максимальной возможной точности позиционирования, что известно также как слежение. Однако на практике точность позиционирования пьезоэлектрических приводов жестко ограничена гистерезисом при относительно больших перемещениях и ползучестью на низких частотах. Гистерезис возникает, когда положение платформы начинает зависеть от предыстории ее перемещения. Это происходит потому, что пьезоэлектрический отклик на входное напряжение зависит от предыстории напряжения. Ползучесть возникает, когда платформа медленно смещается в направлении последнего перемещения. Этот медленный дрейф положения обусловлен предыдущим входным напряжением, поданным на устройство нанопозиционирования. В результате для всех систем нанопозиционирования обычно требуется управление с некоторой прямой или обратной связью, позволяющее уменьшить нелинейность, обусловленную гистерезисом и ползучестью.
Другой проблемой, связанной с системами нанопозиционирования, является механический резонанс, который является результатом взаимодействия массы платформы с гибким основанием конечной жесткости, механическими связями и/или приводом. Механический резонанс приводит к возникновению нежелательных колебаний в системе нанопозиционирования, что влияет на точность позиционирования, скорость сканирования и стабильность. Таким образом, частота сигналов привода ограничена приблизительно от 1% до 10% от резонансной частоты. Это неизбежно ограничивает полосу частот системы нанопозиционирования с замкнутой петлей обратной связи.
Одним из самых популярных технических решений для управления системой нанопозиционирования является обратная связь на основе датчика с использованием интегрального или пропорционального интегрального управления. Однако полоса частот при управлении с интегральным слежением жестко ограничена наличием сильно резонансных мод и шумами, вносимыми датчиком. Было предложено расширять полосу частот системы с обратной связью или путем использования инверсии резонансных динамических явлений с помощью узкополосного режекторного фильтра, или путем подавления резонансных динамических явлений с использованием контроллера затухания.
Однако каждому из предложенных решений присущи недостатки. Недостатком технических решений на основе инверсии является необходимость построения точной модели системы. Например, если резонансная частота системы сдвигается только на 1%, контроллер с обратной связью для инверсии с высоким коэффициентом усиления может стать нестабильным. В большинстве приложений это недопустимо, поскольку нагрузочная масса, а следовательно, резонансная частота устройства нанопозиционирования, может значительно изменяться во время работы. В результате такой чувствительности высококачественные контроллеры на основе инверсии обычно занимают нишу в приложениях, в которых резонансная частота стабильна, или когда можно непрерывно проводить перекалибровку контроллера обратной связи.
Попытки улучшения рабочих параметров систем и способов нанопозиционирования часто включают использование технологии подавления для активного подавления первой резонансной моды. Это позволяет уменьшить время установки, дает пропорциональное увеличение скорости сканирования и облегчает слежение, поскольку может быть увеличено усиление контроллера слежения.
Контроллеры затухания способны уменьшить ограничения на полосу частот, обусловленные механическим резонансом, но усиление контроллера слежения ограничено диапазоном стабильности, а точность позиционирования остается в основном обусловленной шумами датчика.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Первый аспект изобретения относится к системе для позиционирования объекта, содержащей:
неподвижное основание;
опору для объекта;
привод для приложения силы для перемещения опоры относительно неподвижного основания;
датчик для измерения силы нагрузки, действующей на опору; и
контроллер для обработки измеренной силы нагрузки для управления положением опоры и/или для подавления по меньшей мере одной резонансной частоты системы.
Если из контекста четко не следует обратное, то всюду в описании и в формуле изобретения слова "содержит", "содержащий" и т.п. должны рассматриваться в смысле включения, а не исключения или ограничения; то есть в смысле "содержащий, но этим не ограниченный".
Предпочтительно, контроллер обрабатывает измеренную силу нагрузки в петле обратной связи.
Предпочтительно, контроллер регулирует положение опоры в ответ на измеренную силу нагрузки. Предпочтительно, контроллер управляет приводом для регулировки положения опоры.
Предпочтительно, контроллер вычисляет перемещение опоры по измеренной силе нагрузки. Предпочтительно, перемещение опоры вычисляется согласно выражению:
,
где d - перемещение опоры;
F - измеренная сила нагрузки;
Мр - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.
Предпочтительно, датчик силы генерирует выходное напряжение, соответствующее измеренной силе нагрузки. Кроме того, предпочтительно, перемещение опоры вычисляется как значение, пропорциональное выходному напряжению датчика силы. В еще одной предпочтительной форме перемещение опоры вычисляется согласно выражению:
,
где d - перемещение опоры;
Vs - выходное напряжение, соответствующее измеренной силе нагрузки;
F - измеренная сила нагрузки;
gs - коэффициент передачи датчика силы;
Мр - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.
Предпочтительно, датчик силы калибруют с помощью заряда и/или напряжения датчика силы.
Предпочтительно, контроллер обрабатывает измеренную силу нагрузки в петле обратной связи на частотах выше заранее заданной переходной частоты ωc. Предпочтительно, переходная частота лежит выше граничной частоты датчика силы. В еще одной предпочтительной форме переходная частота определяется согласно выражению:
,
где ωc - переходная частота;
ωco - граничная частота;
Rin - входной импеданс буфера напряжения и
C - емкость датчика силы.
Предпочтительно, система включает датчик положения для измерения положения опоры. Кроме того, предпочтительно, измеренное положение опоры используется для вычисления перемещения опоры. Альтернативно, контроллер вычисляет перемещение опоры по входному напряжению привода и реакции системы с разомкнутой петлей обратной связи. В любом случае, предпочтительно, контроллер обрабатывает вычисленное перемещение в петле обратной связи на частотах ниже переходной частоты ωc.
Предпочтительно, система включает датчик перемещения для измерения перемещения опоры. Кроме того, предпочтительно, контроллер обрабатывает измеренное перемещение в петле обратной связи на частотах ниже переходной частоты ωc.
Предпочтительно, контроллер обрабатывает измеренную силу нагрузки в петле обратной связи для увеличения коэффициента затухания системы.
Предпочтительно, по меньшей мере одна резонансная частота относится к первой резонансной моде системы. Предпочтительно, система имеет множество резонансных мод, и контроллер подавляет одну или более резонансных мод системы.
Предпочтительно, датчик силы помещен по меньшей мере частично между опорой и приводом. Предпочтительно, датчик силы является пьезопреобразователем.
Предпочтительно, для улучшения характеристики системы с замкнутой петлей обратной связи контроллер добавляет сигнал прямой связи на вход петли обратной связи.
Второй аспект изобретения относится к способу управления системой для позиционирования объекта, при этом указанная система содержит неподвижное основание, опору для объекта и привод для приложения силы к этой опоре, включающему следующие шаги:
приведение в действие привода для приложения силы для перемещения опоры относительно неподвижного основания;
измерение силы нагрузки на опору и
обработку измеренной силы нагрузки для управления положением опоры и/или для подавления по меньшей мере одной резонансной частоты системы.
Предпочтительно, шаг обработки включает обработку измеренной силы нагрузки в петле обратной связи.
Предпочтительно, способ включает шаг регулировки положения опоры в ответ на измеренную силу нагрузки. Предпочтительно, способ включает шаг управления приводом для регулировки положения опоры.
Предпочтительно, способ включает шаг вычисления перемещения опоры по измеренной силе нагрузки. Предпочтительно, перемещение опоры вычисляется согласно выражению:
,
где d - перемещение опоры;
F - измеренная сила нагрузки;
Мр - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.
Предпочтительно, шаг измерения силы нагрузки включает использование датчика силы для измерения силы нагрузки. Кроме того, предпочтительно, датчик силы генерирует выходное напряжение, соответствующее измеренной силе нагрузки. Также, предпочтительно, способ включает шаг вычисления перемещения опоры как значения, пропорционального выходному напряжению датчика силы. В еще одной предпочтительной форме перемещение опоры вычисляется согласно выражению:
,
где d - перемещение опоры;
Vs - выходное напряжение, соответствующее измеренной силе нагрузки;
F - измеренная сила нагрузки;
gs - коэффициент передачи датчика силы;
Мр - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.
Предпочтительно, способ включает шаг калибровки датчика силы с юмощью заряда и/или напряжения датчика силы.
Предпочтительно, шаг обработки включает обработку измеренной силы нагрузки в петле обратной связи на частотах выше заранее заданной переходной частоты ωc. Кроме того, предпочтительно, переходная частота лежит выше граничной частоты датчика силы. В еще одной предпочтительной форме переходная частота определяется согласно выражению:
,
где ωc - переходная частота;
ωco - граничная частота;
Rin - входное сопротивление буфера напряжения и
C - емкость датчика силы.
Предпочтительно, способ включает шаги измерения положения опоры и вычисления перемещения опоры по измеренному положению опоры. Альтернативно, способ включает шаг вычисления перемещения опоры по входному напряжению привода и реакции системы с разомкнутой петлей обратной связи. В любом случае, предпочтительно, чтобы способ дополнительно включал шаг обработки вычисленного перемещения в петле обратной связи на частотах ниже переходной частоты ωc.
Предпочтительно, способ включает шаг измерения перемещения опоры. Кроме того, предпочтительно, способ включает шаг обработки измеренного перемещения в петле обратной связи на частотах ниже переходной частоты ωc.
Предпочтительно, способ включает шаг обработки измеренной силы нагрузки в петле обратной связи для увеличения коэффициента затухания системы.
Предпочтительно, по меньшей мере одна резонансная частота относится к первой резонансной моде системы. Предпочтительно, система имеет множество резонансных мод, и контроллер подавляет одну или более резонансных мод системы.
Предпочтительно, для улучшения характеристики системы с замкнутой петлей обратной связи способ включает шаг добавления сигнала прямой связи на вход петли обратной связи.
Предпочтительно, система является системой нанопозиционирования. Таким образом, система обеспечивает точное перемещение и позиционирование объекта в наномасштабе.
Согласно изобретению измерение силы нагрузки привода используется в качестве переменной обратной связи для слежения (позиционирования) и/или для управления затуханием в петле обратной связи. Преимущественно, использование измеренной силы нагрузки в петле обратной связи приводит к упорядочению полюсов и нулей. При этом простой интегральный контроллер обеспечивает превосходные характеристики слежения и затухания, без каких-либо ограничений на коэффициент усиления. Таким образом, система становится стабильной, теоретически с бесконечным запасом стабильности по коэффициенту усиления и запасом по фазе 90 градусов. Шумы позиционирования также существенно уменьшаются, поскольку пьезоэлектрический датчик силы генерирует меньше шумов, чем емкостный или индуктивный датчик положения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже предпочтительные варианты выполнения настоящего изобретения описаны на примерах со ссылками на сопровождающие чертежи, где:
на фиг.1 показана схема типичной системы G нанопозиционирования;
на фиг.2a показаны частотные характеристики для системы нанопозиционирования, изображенной на фиг.1;
на фиг.2b показаны графики коэффициента усиления петли обратной связи для системы нанопозиционирования, изображенной на фиг.1;
на фиг.3 схематично показана платформа для нанопозиционирования с одной степенью свободы согласно одному из вариантов выполнения настоящего изобретения;
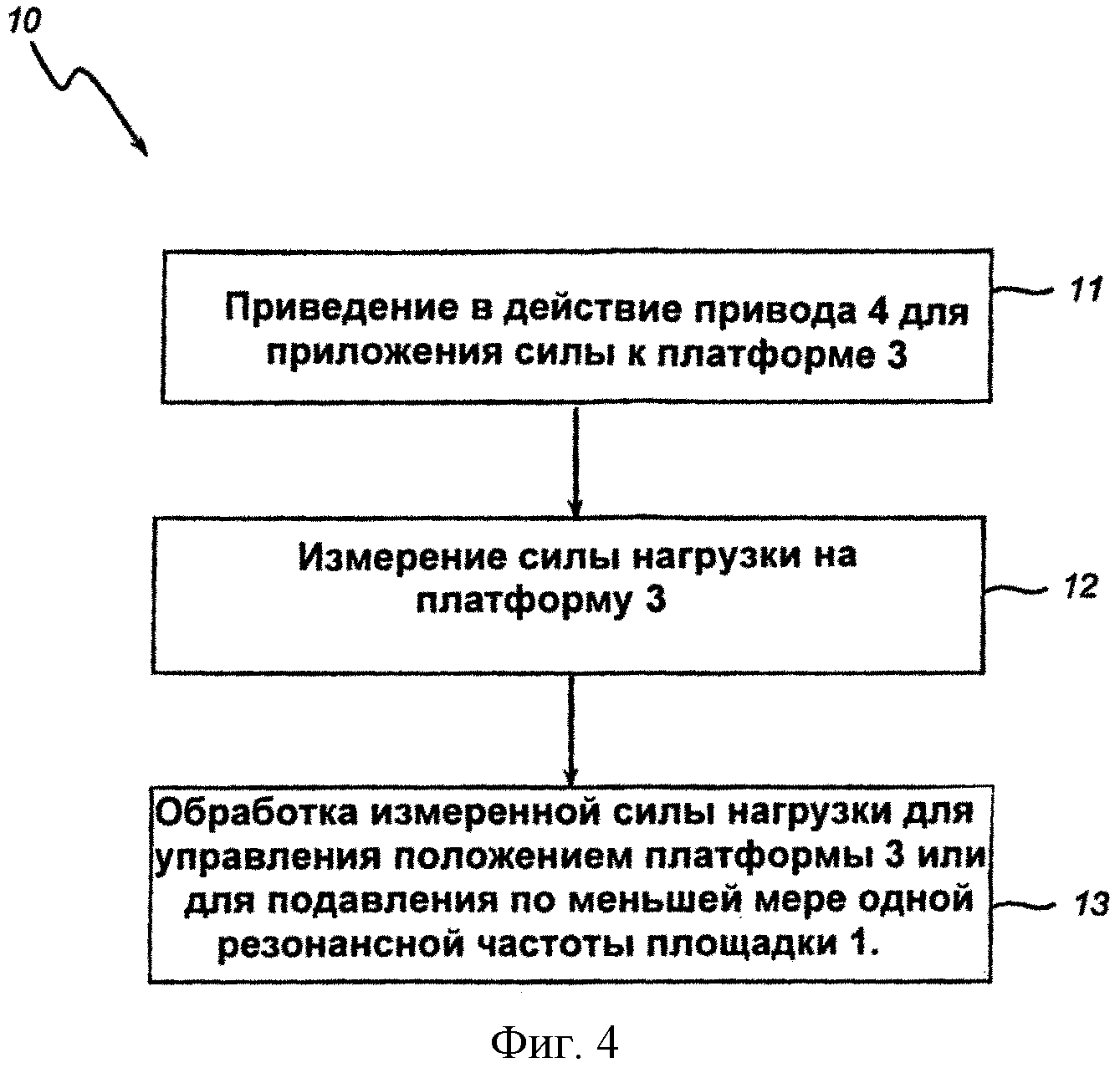
на фиг.4 схематично иллюстрируется способ согласно одному из вариантов выполнения настоящего изобретения, предназначенный для использования в системе, изображенной на фиг.3;
на фиг.5а изображена схема, представляющая систему нанопозиционирования согласно другому варианту выполнения настоящего изобретения;
на фиг.5b показан график частотной зависимости для системы с обратной связью, изображенной на фиг.5a;
на фиг.5c показан график шумов позиционирования для системы, изображенной на фиг.5a;
на фиг.6a показан монолитный пакетный привод Noliac, предназначенный для использования в платформе для нанопозиционирования, изображенной на фиг.3;
на фиг.6b схематично изображен привод, показанный на фиг.4;
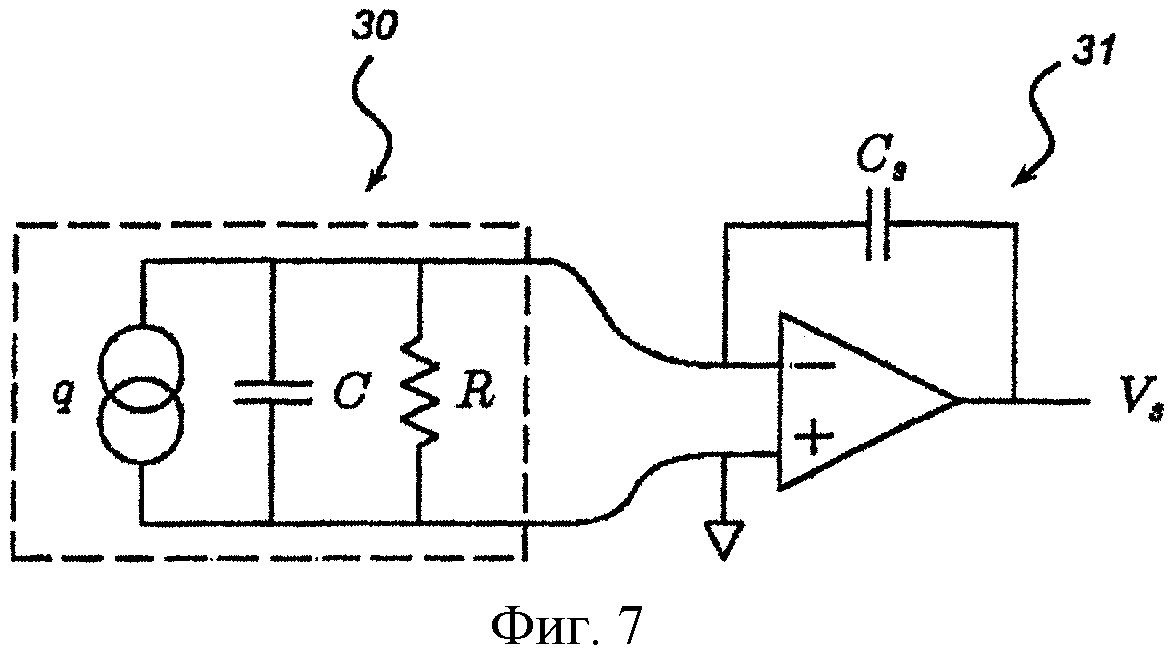
на фиг.7 схематично изображена электрическая модель датчика силы и соответствующая схема измерения заряда, используемая в системе фиг.3;
на фиг.8 схематично изображена механическая схема, представляющая систему на фиг.3;
на фиг.9 показаны графики зависимости функции передачи силы от частоты для системы, изображенной на фиг.3;
на фиг.10 показана схема, представляющая систему нанопозиционирования согласно ещё одному варианту выполнения настоящего изобретения;
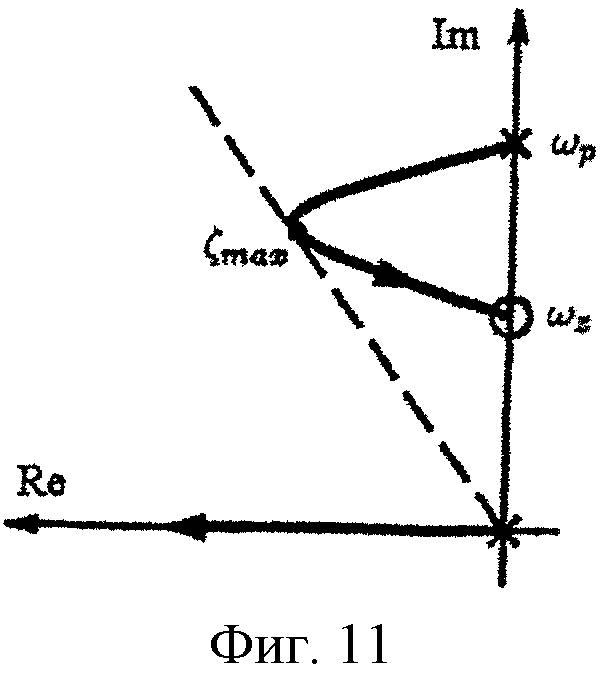
на фиг.11 показана кривая корневого годографа полюсов для интегрального контроллера C, показанного на фиг.10, с замкнутой петлей обратной связи;
на фиг.12 показаны графики зависимости от частоты для сравнения частотных характеристик системы, изображенной на фиг.9, с обратной связью и без обратной связи;
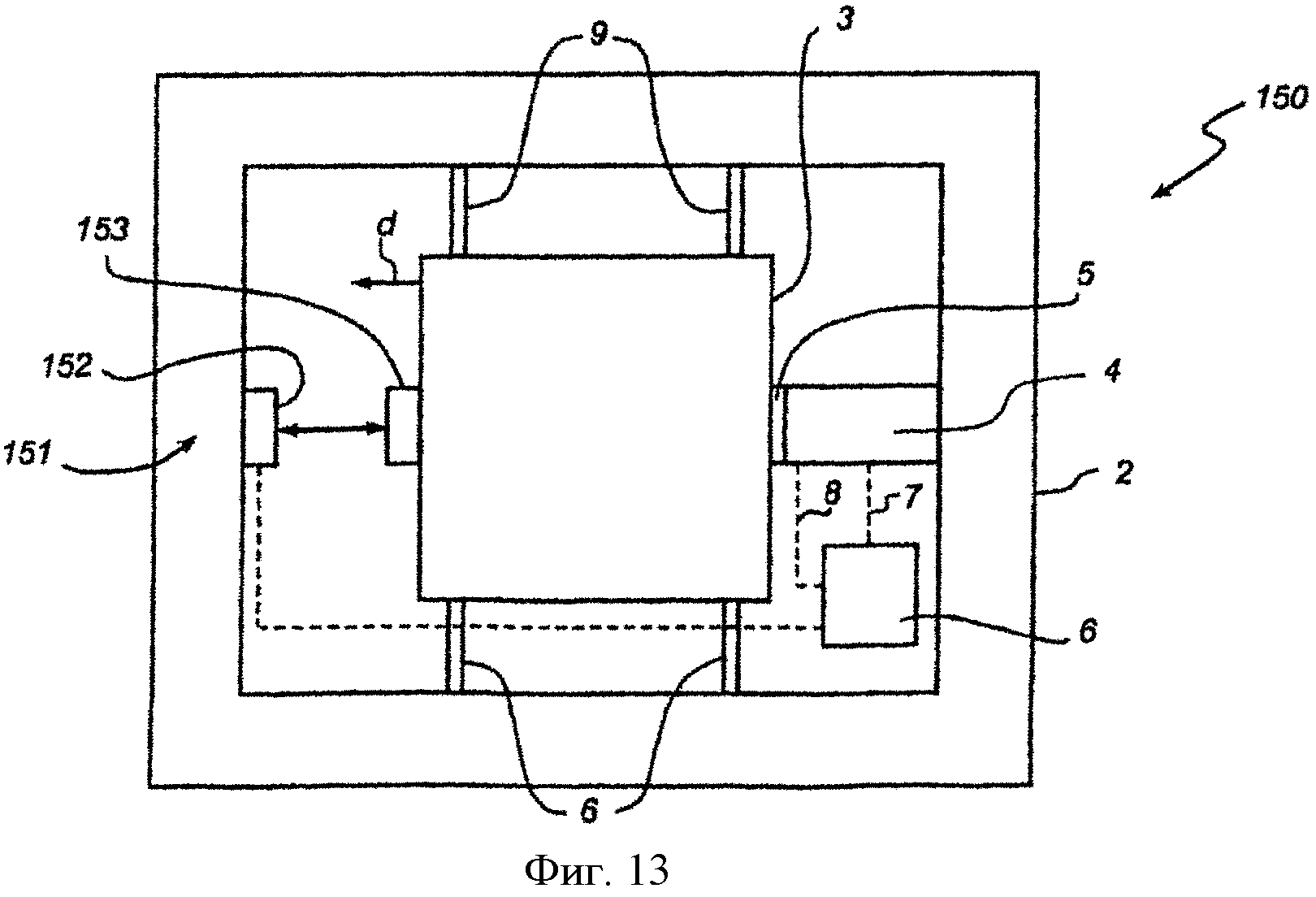
на фиг.13 схематично показана платформа нанопозиционирования с одной степенью свободы в соответствии с еще одним вариантом выполнения настоящего изобретения;
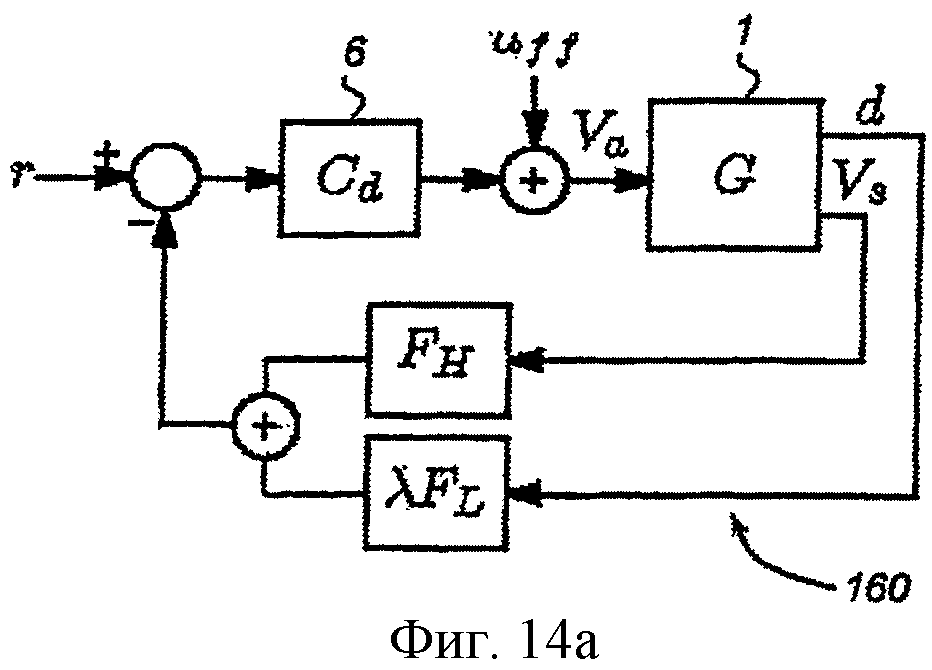
на фиг.14a изображена схема, представляющая систему нанопозиционирования, изображенную на фиг.13;
на фиг.14b показан график зависимости от частоты в системе с обратной связью, изображенной на фиг.13 и 14a;
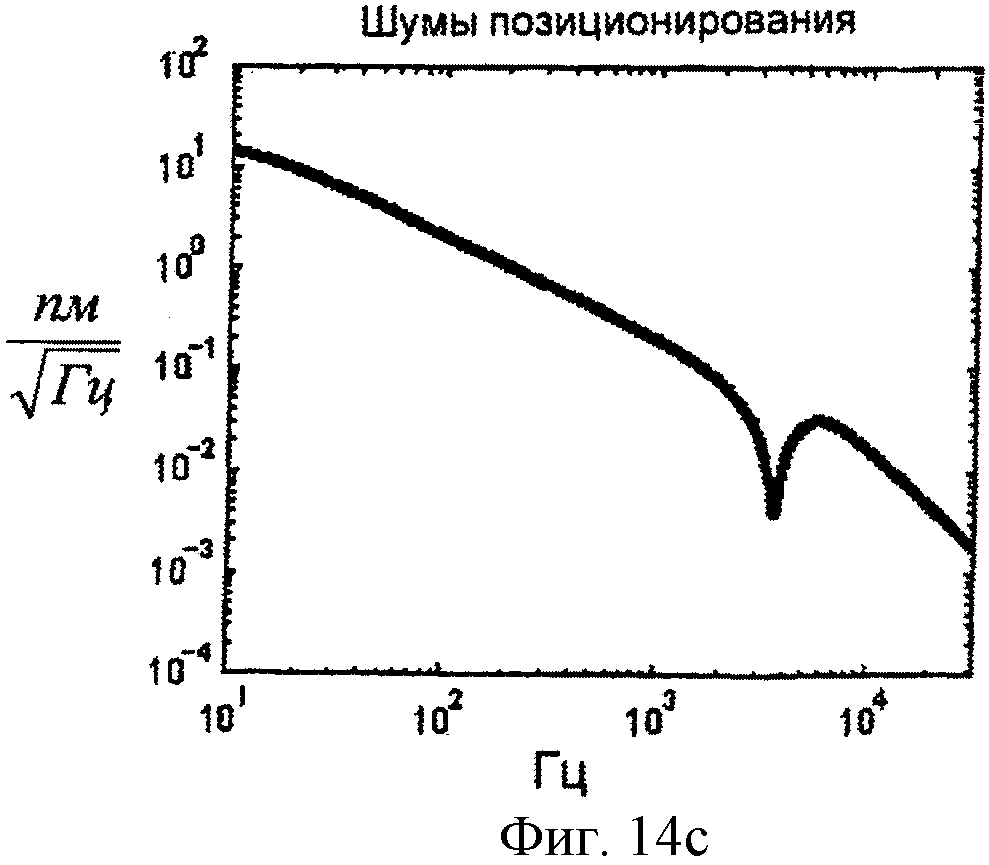
на фиг.14с показан график шумов позиционирования для системы, изображенной на фиг.13 и 14a;
на фиг.15 схематично иллюстрируется способ согласно еще одному варианту выполнения настоящего изобретения, подходящий для реализации в системе, изображенной на фиг.13;
на фиг.16a показана схема, представляющая систему нанопозиционирования согласно еще одному варианту выполнения настоящего изобретения;
на фиг.16b показан график частотной характеристики системы, изображенной на фиг.16a, с обратной связью;
на фиг.16c показан график шумов позиционирования для системы, изображенной на фиг.16a;
на фиг.17 и 18 показаны графики зависимостей от частоты, позволяющие сравнить рабочие характеристики вариантов выполнения настоящего изобретения, показанных на фиг.5 и 13-16, с базовым интегральным контроллером;
на фиг.19a, 19b и 19c изображены платформы нанопозиционирования с двумя типами соответствующих датчиков силы, соответственно, в рамках одного из примеров настоящего изобретения; и
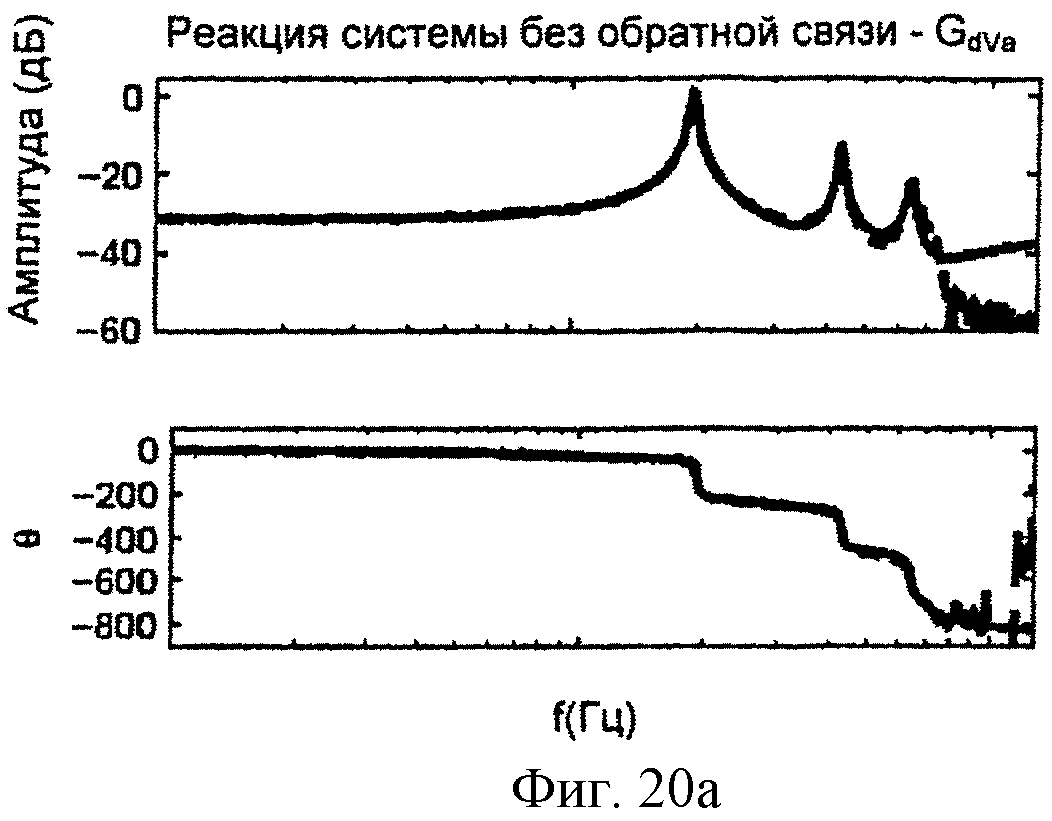
на фиг.20a и 20b показаны частотные характеристики системы с обратной связью и без обратной связи, иллюстрирующие рабочие характеристики платформы нанопозиционирования, показанной на фиг.19.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ВЫПОЛНЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Предпочтительное применение изобретения лежит в области систем, устройств и способов нанопозиционирования. В таких системах и устройствах обычно имеется неподвижное основание с подвижной платформой или площадкой, при этом имеются направляющие гибкие связи и/или механические связи для ограничения перемещения платформы или площадки до одной степени свободы. Объект закреплен или расположен на платформе или площадке, а устройство перемещает платформу для точного позиционирования объекта. Кроме того, с платформой могут быть соединены дополнительные гибкие связи и/или механические связи, так что платформа может иметь множество степеней свободы, но в любой момент может быть ограничена перемещением с одной степенью свободы.
Как рассмотрено выше, такие системы нанопозиционирования имеют ограничения, обусловленные гистерезисом, ползучестью и механическим резонансом. В частности, механический резонанс ограничивает работу систем нанопозиционирования с точки зрения точности позиционирования, скорости и стабильности.
Поскольку наибольший интерес представляет низшая резонансная мода, динамика типичной системы нанопозиционирования может быть аппроксимирована низкочастотной системой G второго порядка с единичным усилением, которой управляет интегральный контроллер C с коэффициентом усиления α, как показано на фиг.1, и следующим уравнением:
,
где ωr - резонансная частота;
ξ - коэффициент затухания и
s - параметр преобразования Лапласа.
Амплитудно-частотная и фазочастотная характеристики этой системы представлены на фиг.2. Чтобы избежать возбуждения механического резонанса, частота приводных сигналов ограничена частотами приблизительно от 1% до 10% от резонансной частоты. В приложениях, где частота сканирования накладывает главное ограничение на рабочие характеристики, например, в атомно-силовом микроскопе, работающем с частотой телевизионной развёртки, системы нанопозиционирования работают без обратной связи с приводными сигналами, форма которых выбрана так, чтобы уменьшить содержание гармоник. Хотя такие технические решения могут обеспечить быстрое срабатывание, они не являются точными, поскольку нелинейность и возмущения остаются неконтролируемыми.
Как правило, реакция систем и устройств нанопозиционирования улучшается при использовании датчика и петли обратной связи. Распространенным техническим решением в коммерческих системах нанопозиционирования является обратная связь на основе датчика с использованием интегрального или пропорционального интегрального управления. Такие контроллеры являются простыми, устойчивыми к ошибкам моделирования и, благодаря высокому коэффициенту усиления в петле обратной связи на низких частотах, эффективно уменьшают нелинейность пьезоэлектрического эффекта.
Однако полоса частот интегральных следящих контроллеров строго ограничена наличием высоких резонансных мод. Причину такого ограничения полосы частот с замкнутой петлей обратной связи можно объяснить путем анализа графика коэффициента усиления в петле на фиг.2. Фактором, ограничивающим максимальный коэффициент усиления обратной связи и полосу частот в замкнутом контуре, является запас по усилению. На резонансной частоте ωr отставание по фазе превышает π, и, таким образом, для стабильной обратной связи коэффициент усиления в петле обратной связи должен быть меньше 1, или 0 дБ. Условие для стабильности системы с обратной связью следующее:
или α<2ωrξ,
где α - коэффициент усиления в петле обратной связи;
ωr - резонансная частота и
ξ - коэффициент затухания.
Когда коэффициент усиления системы G равен единице, коэффициент α усиления обратной связи одновременно представляет собой полосу частот ωcl с обратной связью (в радианах в секунду). Таким образом, максимальная полоса частот с замкнутой петлей обратной связи равна удвоенному произведению коэффициента ξ затухания и резонансной частоты ωr. Это является серьезным ограничением, поскольку коэффициент ξ затухания обычно имеет порядок 0,01, а это означает, что максимальная полоса частот ωcl с обратной связью составляет меньше 2% от резонансной частоты ωr.
Одно из технических решений для улучшения полосы частот с замкнутой петлей обратной связи основано на динамическом подавлении резонанса с использованием контроллера затухания. Для управления затуханием используется петля обратной связи для искусственного увеличения коэффициента ξ затухания системы. Согласно уравнению (2) увеличение коэффициента ξ затухания позволяет пропорционально увеличить коэффициент усиления обратной связи и полосу частот обратной связи, что позволяет преодолеть ограничения на полосу частот, обусловленные механическим резонансом. Хотя контроллеры затухания сами по себе не могут увеличить полосу частот обратной связи слишком далеко за резонансную частоту, их преимущество заключается в том, что они нечувствительны к изменениям резонансной частоты. Кроме того, поскольку контроллеры затухания вносят затухание, а не инвертируют механический резонанс, они обеспечивают лучшее подавление внешних возмущений, чем системы на основе инверсии.
Для улучшения рабочих характеристик системы управление затуханием часто объединяют с управлением слежением. Однако подобно всем системам управления с обратной связью усиление контроллера слежения также ограничено запасами по стабильности, а разрешающая способность позиционирования определяется шумами датчика. Для демонстрации ограничений, налагаемых шумами датчика, ниже рассматривается устройство нанопозиционирования с управлением обратной связью на основе высококачественного емкостного датчика с диапазоном перемещения ±100 мкм и среднеквадратичным шумом (RMS, root-mean-square) . Оценка среднеквадратичных шумов позиционирования может быть найдена путем умножения плотности шума на квадратный корень от полосы частот обратной связи, то есть:
Например, при полосе частот обратной связи 100 Гц среднеквадратичный шум позиционирования составляет в среднем 0,2 нм, или полная амплитуда составляет приблизительно 1,2 нм, если шум описывается нормальным распределением. Для разрешающей способности на атомарном уровне полоса частот с замкнутой петлей обратной связи должна быть уменьшена до 1 Гц, что является серьезным ограничением. Таким образом, с ростом полосы частот шум, обусловленный датчиком, создает проблему для разрешающей способности позиционирования.
На фиг.3 согласно одному из вариантов выполнения настоящего изобретения предложена система для позиционирования объекта, состоящая из площадки 1 нанопозиционирования, имеющей неподвижное основание 2 и опору в виде платформы 3 для объекта (не показан). Между неподвижным основанием 2 и платформой 3 закреплен пьезоэлектрический привод 4, который прикладывает силу для перемещения платформы 3 относительно неподвижного основания 2. Между платформой и приводом 4 помещен датчик в виде пьезопреобразователя 5 для измерения силы нагрузки на платформу 3. Контроллер 6 электрически соединен с приводом 4 и пьезопреобразователем 5 по линиям 7 и 8 связи соответственно и производит обработку измеренного значения силы нагрузки для управления положением опоры (и, таким образом, объекта) или подавляет по меньшей мере одну резонансную частоту системы 1.
У площадки 1 дополнительно имеется множество гибких связей 9 для такого направления перемещением платформы 3, чтобы это перемещение происходило только в указанном направлении и на расстояние d, ограничивая перемещение платформы по остальным степеням свободы. Таким образом, гибкие связи 9 обеспечивают скольжение или перемещение платформы 3 на расстояние d в одном направлении (то есть с одной степенью свободы). В комбинации с гибкими связями или вместо гибких связей 9 могут использоваться механические связи.
На фиг.4 показан способ согласно одному из вариантов выполнения настоящего изобретения, при этом одинаковые элементы обозначены одинаковыми позициями. Хотя способ 10 описан применительно к использованию в системе 1 нанопозиционирования, очевидно, что этот способ может быть применен к другим системам позиционирования и нанопозиционирования, нежели показаны на фиг.3.
В способе 10 на шаге 11 пьезоэлектрический привод 4 действует для приложения силы к платформе 3 с целью её перемещения относительно неподвижного основания. На шаге 12 пьезопреобразователь измеряет силу нагрузки на платформу 3. На шаге 13 измеренное значение силы нагрузки обрабатывают для управления положением платформы 3 или для подавления по меньшей мере одной резонансной частоты системы.
Система 1 и способ 10 преимущественно реализованы в петле обратной связи контроллера 6 для управления как слежением (то есть, положением), так и затуханием (полосой частот или скоростью). Изобретение позволяет использовать простой интегральный контроллер для обеспечения слежения и затухания в системе и способе нанопозиционирования без ограничений на коэффициент усиления.
В процессе работы входной сигнал, соответствующий требуемому положению объекта на платформе 3, посылают в контроллер 6, который преобразует его в сигнал, соответствующий необходимому перемещению d1. Затем контроллер 6 по линии 7 связи приводит в действие пьезоэлектрический привод 4. Затем привод 4 прилагает силу к платформе 3 для ее перемещения на расстояние d. Пьезопреобразователь 5 измеряет силу нагрузки на платформу 3, а затем по линии 8 связи посылает сигнал, соответствующий измеренному значению силы нагрузки, назад в контроллер 6. Измеренный сигнал силы нагрузки вводят в петлю обратной связи контроллера 6 для вычисления действительного перемещения d2 согласно заранее заданной пропорциональной зависимости, которая более подробно описана ниже. Если имеет место отличие действительного перемещения d2 платформы 3 относительно требуемого перемещения d1, то есть d1≠d2, то контроллер 6 посылает по линии связи 7 в пьезоэлектрический привод 4 сигнал для уменьшения или увеличения силы, прилагаемой к платформе 3, а следовательно, силы нагрузки на платформу 3, регулируя тем самым положение платформы 3. Таким образом, площадка 1 способна динамически корректировать положение платформы в ответ на силу нагрузки без нежелательного воздействия со стороны шумов, обусловленных датчиком. Это происходит потому, что пьезопреобразователь 5 генерирует намного меньше шума, чем стандартные датчики положения, такие как индуктивный и емкостный датчики положения.
Альтернативно или дополнительно к регулировке положения, контроллер 6 обрабатывает измеренное значение силы нагрузки в петле обратной связи для увеличения коэффициента затухания ξ для площадки 1. Это приводит к демпфированию или подавлению резонансных частот площадки 1, особенно первой (самой низкочастотной) резонансной моды. Кроме того, это пропорционально увеличивает коэффициент усиления обратной связи и полосу частот с замкнутой петлей обратной связи контроллера слежения по мере роста его коэффициента усиления. Следовательно, площадка 1 может работать при большей полосе частот обратной связи, удовлетворяя критериям стабильности системы с обратной связью приблизительно согласно уравнению (2). Предпочтительно, контроллер способен динамически подавлять резонансную частоту (или частоты, если имеется множество резонансных моды) площадки 1 в ответ на изменения массы объекта и, таким образом, не требует калибровки площадки 1 каждый раз, когда на платформу 3 помещают объект другой массы.
На фиг.5 иллюстрируется еще один вариант выполнения настоящего изобретения, в котором одинаковые элементы обозначены одинаковыми позициями. В этом варианте выполнения настоящего изобретения контроллер 6 включает контроллер Cd затухания и контроллер Ct слежения, отделенные друг от друга, и использует измеренное значение силы нагрузки только для подавления резонансной частоты или частот системы G. Контроллер Ct слежения использует петлю обратной связи по перемещению для осуществления прямого слежения за площадкой 1. Перемещение d должно быть определено с помощью датчика физического перемещения, такого как емкостный, индуктивный или оптический датчик.
Малую полосу частот интегрального контроллера Ct слежения значительно улучшают путем добавления внутренней петли обратной связи по силе контроллера Cd затухания, как показано на фиг.5а. Когда контроллер Cd затухания устраняет слегка подавленный резонанс, запас устойчивости по коэффициенту усиления оказывается кардинально увеличен, что позволяет пропорционально увеличить полосу частот слежения. Для нахождения передаточной функции с замкнутой петлей обратной связи удобно, прежде всего, найти передаточную функцию внутренней петли. Передаточная функция от u к d определяется следующим образом:
где GdVa - передаточная функция преобразования приложенного напряжения в перемещение;
Cd - контроллер подавления, использующий обратную связь по силе согласно данному варианту выполнения настоящего изобретения; и
GVsVa - передаточная функция от приложенного напряжения к обнаруженному (выходному) напряжению.
Тогда реакция с замкнутой петлей от r к d определяется так:
или эквивалентно
Частотная характеристика этой передаточной функции показана на фиг.5b. По сравнению с интегральным контроллером с тем же самым запасом устойчивости по коэффициенту усиления (5 дБ) полоса частот была увеличена от 60 Гц до 1 кГц. Хотя это является превосходным улучшением по сравнению с базовым интегральным контроллером, запас устойчивости по коэффициенту усиления все еще чувствителен к изменениям резонансной частоты. На практике контроллер должен быть разработан максимально стабильным с точки зрения устойчивости по отношению к самой низкой резонансной частоте. Одним из недостатков увеличения полосы частот с замкнутой петлей обратной связи является увеличение шумов позиционирования. Это иллюстрируется более широкой спектральной плотностью шума на фиг.5c, которая получена из плотности аддитивных шумов датчиков и чувствительности к помехам в петле обратной связи. Следовательно, предпочтительно в контроллере слежения дополнительно применить обратную связь по силе вместо обратной связи по перемещению. Кроме того, заявитель обнаружил, что использование измеренной силы нагрузки в качестве переменной обратной связи обеспечивает преимущества по сравнению с существующими петлями обратной связи, в частности петлями обратной связи по перемещению, в которых в качестве переменной обратной связи используется измеренное перемещение. Перед подробным обсуждением этих преимуществ необходимо более подробно описать теоретические основы системы 1 и способа 10 согласно настоящему изобретению.
Система 1 и способ 10, соответственно, адекватно демонстрируют доминантные динамические характеристики, присущие многим геометриям нанопозиционирования. В последующем обсуждении типичный многослойный монолитный пакетный привод 25 Noliac, содержащий нескольких слоев 26, используется как пьезоэлектрический привод 4, как лучше всего изображено на фиг.6a. На фиг.6b показана упрощенная схема, представляющая пакетный привод 25, при этом указанная схема включает развиваемую силу Fa, зависящую от напряжения, жесткость ka, эффективную массу Ma и коэффициент ca затухания.
При работе системы 1 пьезоэлектрический пакетный привод 4 в ответ на приложенное напряжение испытывает внутреннее механическое напряжение. Развиваемая сила Fa, зависящая от напряжения, представляет это механическое напряжение и связана со "свободным" перемещением d платформы 3 выражением:
где ΔL - изменение длины привода (м) и
ka - жесткость привода (Н/м).
Развиваемую силу Fa легче всего связать с приложенным напряжением, если исходить из стандартного выражения для ненапряженных пакетных приводов,

где d33 - константа пьезоэлектрической деформации (м/В),
n - количество слоев и
Va - приложенное напряжение.
Комбинация уравнений (7) и (8) дает выражение для развиваемой силы в зависимости от приложенного напряжения:

Таким образом, отношение развиваемой силы Fa к приложенному напряжению Va равно d33nka ньютонов на вольт, то есть указанная зависимость является пропорциональной. Ниже эта константа обозначена ga, то есть

Очевидно, что развиваемая сила Fa, приложенная к платформе 3, не является силой нагрузки на платформу 3, приводящей к перемещению d, поскольку часть силы Fa рассеивается из-за комбинации эффектов жесткости и затухания в гибких связях и приводах, а также вследствие масс платформы и привода.
Хотя силу F нагрузки можно измерить множеством способов, в рассматриваемом варианте выполнения настоящего изобретения используется пьезопреобразователь 5 для минимизации дополнительной массы и соответствия с датчиком силы. В частности, пьезопреобразователи преимущественно обеспечивают высокую чувствительность и широкую полосу частот при малых шумах на высоких частотах. На фиг.3 преобразователь 5 имеет вид единственной пластины из пьезоэлектрического материала, вставленной или зажатой между платформой 3 и приводом 4. При этом количество заряда D (кулон/м2), генерируемого на единицу площади, дается стандартным выражением для заряда деформации в уравнениях для описания пьезоэлектрического эффекта:
где d33 - константа пьезоэлектрической деформации (м/В) и
Т - механическое напряжение в преобразователе 5.
Тогда генерируемый заряд
Если пьезопреобразователь 5 содержит n слоев, то генерируемый заряд:
Электрическая модель пьезоэлектрического датчика 30 силы и схема 31 измерения заряда показаны на фиг.7. В этой схеме выходное напряжение Vs равно:
где Vs - выходное напряжение в схеме;
q - заряд;
Cs - выходная емкость схемы;
n - количество слоев в приводе;
d33 - константа пьезоэлектрической деформации (м/В) и
F - сила нагрузки.
Таким образом, коэффициент между силой F нагрузки и выходным напряжением Vs составляет вольт на ньютон. Таким образом, сила F нагрузки прямо пропорциональна выходному напряжению датчика 5.
Пьезоэлектрические датчики силы могут быть также откалиброваны с использованием измерения напряжения, а не заряда. В этом случае генерируемый заряд накапливается во внутренней емкости преобразователя. Поскольку напряжение на клеммах является ненулевым, динамические характеристики датчика 5 силы немного меняются. В действительности преобразователь 5 является ограниченно жестким. Однако поскольку жесткость датчика 5 силы уже по существу больше, чем жесткость привода 4 и гибких связей 6, этот эффект незначителен. Поэтому напряжение холостого хода на пьезоэлектрическом датчике силы составляет приблизительно:
где Vs - выходное или измеренное напряжение;
n - количество слоев в пьезоэлектрическом датчике силы;
d33 - константа пьезоэлектрической деформации (м/В) и
F - сила нагрузки;
C - емкость преобразователя.
Поэтому коэффициент между силой F нагрузки и измеренным (выходным) напряжением Vs составляет вольт на ньютон. Таким образом, сила F нагрузки может быть вычислена непосредственно по выходному напряжению Vs преобразователя 5 силы. Таким образом, преобразователь 5 измеряет силу F нагрузки на платформу 3 (благодаря работе привода 4) и преобразует силу F нагрузки в выходное напряжение Vs. Преобразователь 5 передает это выходное напряжение Vs в виде сигнала по линии 8 связи в контроллер 6, который затем обрабатывает сигнал выходного напряжения в петле обратной связи для управления положением платформы 3 и/или подавления по меньшей мере одной резонансной частоты площадки 1, в данном случае речь идет о первой резонансной моде.
Вышеуказанная пропорциональная зависимость позволяет легко измерить в системе 1 силу F нагрузки, обеспечивая тем самым удобную и подходящую переменную обратной связи для управления положением платформы 3 и/или подавления резонансных частот системы 1. Ниже в описании эта константа обозначена как gs, поэтому:
Ниже описана зависимость между развиваемой приводом силой Fa и результирующей силой F нагрузки, приложенной к платформе 3.
На фиг.8 показана упрощенная механическая схема одноосной системы 1 нанопозиционирования, изображенной на фиг.3. Развиваемая приводом сила Fa приводит к возникновению силы F нагрузки и перемещению d платформы. Коэффициенты жесткости и коэффициенты затухания привода и гибких связей 6 обозначены ka, ca и kf, cf соответственно. Второй закон Ньютона описывает динамику подвешенной платформы 3 следующим образом:
где Ma - эффективная масса привода 4;
Mp - эффективная масса платформы 3;
d - перемещение платформы 3;
Fa - сила, создаваемая приводом;
ka - жесткость привода 4;
ca - коэффициент затухания привода 4;
kf - жесткость гибких связей 6;
cf - коэффициент затухания гибких связей 6;
- производная первого порядка и
- производная второго порядка.
Поскольку привод 4 и гибкие связи 6 механически параллельны подвешенной платформе 3, массы, коэффициенты жесткости и затухания могут быть сгруппированы следующим образом:
Тогда уравнения движения принимают вид:
и передаточная функция от силы Fa привода к перемещению d платформы равна:
Если ввести коэффициент ga усиления привода, передаточная функция от приложенного напряжения к перемещению может быть записана как:
Сила F нагрузки может быть связана с силой Fa, создаваемой приводом, путем применения второго закона Ньютона к массе привода следующим образом:
Это дает следующую передаточную функцию между приложенной силой Fa и измеренной силой F:
Передаточная функция в уравнении (25) может быть переписана как:
Эта передаточная функция содержит две пары резонансных полюсов и нулей на частотах ωz и ωp,
где
В общем случае резонансные частоты нулей лежат ниже полюсов. Условие для выполнения такой ситуации:
ωz<ωp
Makf
Поскольку масса Ma привода и жесткость kf гибких связей значительно ниже, чем масса Mp платформы и жесткость ka привода, резонансные нули будут всегда располагаться ниже резонансных частот полюсов. Такая характеристика показана на фиг.9 на графиках амплитудно- и фазочастотных зависимостей для F/Fa.
Ниже более подробно рассмотрен пример системы 1, показанной на фиг.3; он схематично представлен на фиг. 10. В этом примере линейный привод 4 имеет длину 10 мм, выполнен из цирконата-титаната свинца (PZT, lead zirconium titanate) и состоит из 200 слоев. Измеряющий силу пьезопреобразователь 5 представляет собой единичную пластину цирконата-титаната свинца такой же площади. Размеры и физические свойства системы сведены в таблицу 1 ниже.
Из этих значений можно выразить коэффициенты усиления привода и датчика:
что приводит к чувствительности к перемещению с разомкнутой петлей обратной связи:
Чувствительность с разомкнутой петлей обратной связи =
Поэтому полное перемещение составляет 8,5 мкм при 200 B, а резонансные частоты системы равны:
В этом примере измеренная сила нагрузки используется также для подавления резонансных частот системы 1 нанопозиционирования путем обработки сигнала в петле обратной связи интегральным контроллером, который в дальнейшем обозначен как интегральная обратная связь по силе (IFF, integral force feedback). Связь IFF особенно полезна для усиления затухания гибких структур, поскольку ее просто осуществить, и в обычных обстоятельствах она обеспечивает превосходное затухание с гарантированной стабильностью.
Контроллер Cd затухания IFF показан на фиг.10 и связан с системой GVsVa, которая представляет собой систему 1 нанопозиционирования, имеющую соответствующие коэффициенты усиления привода ga и датчика gs. Поэтому:
где GVsVa(s) - это GVsVa для системы;
ga - коэффициент усиления привода;
gs - коэффициент передачи датчика;
F(s) - сила нагрузки;
Fa(s) - сила, с которой воздействует привод 4;
Mp - эффективная масса платформы 3;
M - сумма эффективных масс платформы 3 и привода 4;
cf - коэффициент затухания гибких связей 6;
c - сумма коэффициентов затухания гибких связей 6 и привода 4;
kf - жесткость гибких связей 6;
k - сумма жесткостей гибких связей 6 и привода 4 и
s - параметр преобразования Лапласа.
При введении коэффициентов усиления привода ga и передачи датчика gs передаточная функция системы от приложенного напряжения к измеренному напряжению GVsVa может быть записана как
Для моделирования рабочих характеристик систем управления с обратной связью можно использовать две передаточные функции системы GdVa и GVsVa. Поскольку обе эти передаточные функции имеют одинаковые входное напряжение Va и полюсы, удобно определить систему G с одним входом и двумя выходами, которая содержит обе эти передаточные функции,
В системе GVsVa фазовая характеристика лежит между 0 и 180 градусами. Это общая особенность гибких структур, в которых входной и выходной сигналы пропорциональны приложенной и измеренной силе.
Уникальным признаком таких систем является то, что интегральное управление может быть применено непосредственно, то есть:
где Cd(s) - интегральный контроллер;
α - усиление контроллера и
s - параметр преобразования Лапласа.
Когда интегральный контроллер Cd имеет постоянное отставание по фазе на 90 градусов, фаза коэффициента усиления в петле обратной связи лежит между -90 и 90 градусами. Таким образом, в системе с обратной связью имеется бесконечный запас стабильности по коэффициенту усиления и запас по фазе 90 градусов. Как следствие, у системы GVsVa имеются два преимущества: простота и надежность, в связи с использованием обратной связи по силе (IFF).
В одном из решений для оптимального коэффициента а обратной связи делается два допущения; во-первых, что коэффициенты затухания системы являются малыми величинами и ими можно пренебречь. Во-вторых, что масса Ma привода незначительна по сравнению с массой Mp платформы. В рамках этих допущений оптимальный коэффициент α* обратной связи и соответствующий максимальный коэффициент ξ* затухания обратной связи равны:
Полюсы замкнутой петли обратной связи получаются в виде корней следующего уравнения:
Соответствующий корневой годограф для полюсов замкнутой петли показан на фиг.11, на котором видно, что полюсы замкнутой петли обратной связи остаются в левой полуплоскости, а это свидетельствует о безусловной стабильности системы. Кроме того, корневой годограф обеспечивает простой и удобный способ численного получения оптимального коэффициента обратной связи. Это полезно там, где параметры модели неизвестны, например, если система GVsVa построена непосредственно по экспериментальным данным путем идентификации системы.
В вышеописанном примере системы оптимальный коэффициент усиления и максимальный коэффициент затухания вычисляются из уравнений (38) и (39) и равны:
Эти значения можно проверить с помощью численной кривой корневого годографа. Численно оптимальный коэффициент усиления составляет 4,07×104, что дает коэффициент затухания обратной связи 0,45. Это значение хорошо коррелирует со значениями, предсказанными уравнением (41), и подтверждает достоверность допущений, сделанных при выводе оптимального коэффициента усиления.
Смоделированные частотные отклики разомкнутой и замкнутой петли обратной связи от возмущенного входного значения w к измеренному напряжению датчика Vs в системе 1 с использованием IFF в соответствии с вариантом выполнения настоящего изобретения, показанным на фиг.10, построены в виде зависимости от частоты на фиг.12. На графике зависимость амплитуды от частоты с разомкнутой петлей обратной связи имеет вид линии 100, в то время как в системе с замкнутой обратной связью имеет вид линии 101. Зависимость фазы от частоты в системе с разомкнутой петлей обратной связи имеет вид линии 102, в то время как в системе с замкнутой петлей обратной связи имеет вид линии 103. Сравнение линий 100 и 102 в системе с разомкнутой петлей обратной связи с линиями 101 и 103 в системе с замкнутой петлей обратной связи соответственно демонстрируют, что интегральный контроллер Cd значительно улучшает затухание в системе и ослабление возмущения на низких частотах, где в соответствии с вариантом выполнения настоящего изобретения используется IFF. Таким образом, при использовании измеренной силы нагрузки в качестве переменной обратной связи улучшается затухание в системе 1.
Ниже будет дан вывод зависимости между измеренной силой нагрузки и перемещением d, которая используется контроллером 6 в петле обратной связи для управления положением платформы 3. Это может быть сделано или с использованием второго закона Ньютона для массы Mp платформы, или путем перемножения двух передаточных функций системы (24) и (26), то есть
Таким образом, измеренное напряжение Vs связано со перемещением как:
Таким образом, контроллер 6 использует уравнение (44) в петле обратной связи для вычисления перемещения d платформы 3 в зависимости от измеренного выходного напряжения Vs преобразователя 5 в системе 1.
Из передаточной функции d/Vs в уравнении (44) очевидно, что перемещение пропорционально силе до частоты нулей системы, . Коэффициент пропорциональности gcl=1/gskf имеет размерность м/В. Таким образом,
Поскольку Vs прямо пропорционально перемещению на частотах ниже ωz, то измеренная сила также пропорциональна перемещению на частотах ниже нулей системы.
В заключение необходимо отметить, что зависимость измеренной силы F нагрузки от выходного напряжения Vs может быть использована для вычисления перемещения d выше или ниже частоты ωz реакции. Таким образом, измеренная сила нагрузки представляет собой подходящую переменную обратной связи для контроллера 6, когда требуется определить положение или осуществить отслеживание траектории в системе.
Несмотря на то, что логическим следствием этой пропорциональной зависимости является простое применение опорного входного сигнала в петле обратной связи для силы и рассмотрение отслеживания перемещения на частотах от нулевой до ωz, заявитель обнаружил, что сложно добиться точного отслеживания перемещения из-за фильтра верхних частот, образованного емкостью пьезоэлектрика и конечным входным сопротивлением усилителей заряда и буферов напряжения. Измеренное напряжение на пьезоэлектрическом датчике силы равно:
где Vp - напряжение пьезоэлектрической деформации;
Rin - входное сопротивление буфера напряжения и
C - емкость датчика.
В уравнении (46) фильтр является фильтром верхних частот с граничной частотой 1/RinC.
Для решения этой проблемы граничная частота фильтра верхних частот может быть сделана чрезвычайно низкой, порядка 1 мГц. Однако это не всегда желательно, поскольку время установления для системы 1 становится чрезвычайно большим. Кроме того, система 1 все еще не может производить отслеживание на нулевой частоте, и высокий импеданс источника приводит к шумам в измерениях из-за шумов во входных токах в буфере. Поэтому предпочтительно устранить граничную частоту пьезоэлектрического датчика путем установки "переходной" частоты, на которой пьезоэлектрический датчик силы не используется.
Вместо измеренной силы нагрузки заявитель предлагает использовать вспомогательный сигнал либо для оценки действительного перемещения, либо для измерения перемещения с целью коррекции реакции на низких частотах. Для обеспечения вспомогательного сигнала систему 1 модифицируют в соответствии с еще одним вариантом выполнения настоящего изобретения так, чтобы она включала петлю управления с двумя датчиками, как показано на фиг. 13-15, где сходные элементы обозначены одинаковыми позициями.
Данный вариант выполнения настоящего изобретения отличается от варианта, изображенного на фиг.3, тем, что площадка 150 нанопозиционирования имеет датчик положения или перемещения в виде оптического датчика 151, предназначенного для измерения положения или перемещения платформы 3 при ее перемещении приводом 4. Оптический датчик 151 содержит два чувствительных элемента 152 и 153, которые установлены на основании 2 и платформе 3 соответственно. Оптический датчик 151 электрически соединен с контроллером 6 по линии 154 связи. Сигналы перемещения, полученные из оптического датчика 151, передаются в контроллер 6 по линии 154 связи для их обработки в петле обратной связи. В сущности, площадка 150 нанопозиционирования имеет петлю обратной связи с двумя датчиками, включающую чувствительный пьезопреобразователь 5 силы и оптический датчик 151 перемещения. Кроме того, если необходимо, оптический датчик перемещения может быть заменен емкостным или индуктивным бесконтактным датчиком.
Петля управления слежением схематично показана на фиг.14, где сходные элементы обозначены одинаковыми позициями. Петля 160 аналогична показанной на фиг.8, за исключением дополнительных комплементарных фильтров FH и FL. Эти комплементарные фильтры FH и FL подставляют измеренное значение перемещения dm вместо измеренного выходного напряжения Vs силы нагрузки на частотах ниже переходной частоты ωc, которая, как сказано выше, предпочтительно лежит выше граничной частоты, на которой пьезоэлектрический датчик является ненадежным из-за шумов. Простейшими комплементарными фильтрами являются следующие:
Переходная частота ωc равна полосе частот фильтров FH и FL.
Поскольку измеренный сигнал d перемещения имеет другую чувствительность по сравнению с Vs, он должен быть масштабирован компенсирующей константой λ, как показано на фиг.14. Значение λ должно быть следующим:
Если λ выбрана правильно, отклик замкнутой петли :
Поскольку эта петля управления безусловно стабильна, нет никаких ограничений на коэффициент усиления Cd. Однако поскольку в варианте выполнения настоящего изобретения, изображенном на фиг.5, Cd был выбран так, чтобы обеспечить оптимальное затухание, это значение должно быть сохранено. Предполагается, что дальнейшее увеличение Cd не продуктивно, поскольку ухудшится подавление возмущений на резонансной частоте.
Частотная характеристика для такой замкнутой петли управления с двумя датчиками показана на фиг.14b. Более высокий коэффициент усиления увеличивает полосу частот от 1 кГц до 5,1 кГц по сравнению с вариантом выполнения настоящего изобретения, изображенным на фиг.5, в котором для подавления резонансных частот системы используется измеренная сила нагрузки. Это повышение следует из теоретически бесконечного запаса устойчивости по усилению и запаса по фазе 90°, причем оба запаса устойчивы к изменениям резонансной частоты. Кроме того, на фиг.14c построен шум позиционирования и демонстрируется существенное улучшение шумовой характеристики.
Хотя датчики перемещения обычно создают шумы в широком диапазоне частот, они имеют лучшие тепловые и дрейфовые характеристики, чем пьезоэлектрические датчики. Фактически комплементарные фильтры FH и FL используют лучшие аспекты каждого сигнала. Широкий диапазон частот и низкий шум пьезоэлектрического датчика силы используются на частотах выше переходной частоты ωc, в то время как датчики перемещения обеспечивают высокий уровень стабильности при нулевой частоте и на частотах ниже переходной частоты ωc.
Ниже описана работа площадки 150 нанопозиционирования со ссылками на фиг. 13 и 15, где на фиг. 15 иллюстрируется способ 170 согласно еще одному варианту выполнения настоящего изобретения, при этом сходные элементы обозначены одинаковыми позициями. Площадка 150 нанопозиционирования действует аналогично тому, как описано в варианте, изображенном на фиг.3. Таким образом, входной сигнал, соответствующий требуемому положению объекта на платформе 3, посылают в контроллер 6, который преобразует его в сигнал, соответствующий необходимому перемещению d1. Затем контроллер 6 по линии 7 связи приводит в действие пьезоэлектрический привод 4 сигналом перемещения. Затем на шаге 21 привод 4 прикладывает силу к платформе 3 для ее перемещения на расстояние d. На шаге 22 пьезопреобразователь 5 измеряет силу нагрузки на платформу 3, преобразует силу F нагрузки в выходное напряжение Vs, а затем на шаге 171 передает это выходное напряжение Vs в качестве сигнала, соответствующего измеренной нагрузке, назад в контроллер 6 по линии 8 связи.
Однако в то же время на шаге 172 оптический датчик 151 перемещения измеряет перемещение d с использованием оптических чувствительных элементов 152 и 153, преобразует его значение в сигнал, соответствующий измеренному перемещению d, и на шаге 171 передает его назад в контроллер 6 по линии 154 связи.
На шаге 173 контроллер 6 делит сигнал, представляющий частоту ω1 реакции, на компоненты выше и ниже переходной частоты ωc, обозначенные как элементы 174 и 175 соответственно. Компонент 174 выше ωc обрабатывают, вводя измеренный сигнал силы нагрузки в петлю обратной связи и вычисляя действительное перемещение d2 в соответствии с заранее заданной пропорциональной зависимостью, определяемой уравнением (43), как показано шагом 176 на фиг.14a. В то же время компонент 175 ниже переходной частоты ωc обрабатывают, подавая на шаге 177 измеренное перемещение d в петлю обратной связи вместо измеренной силы нагрузки. Это схематично показано на фиг.15a.
На шаге 178 после обработки компонентов 174 и 175, их затем повторно объединяют с выработкой на шаге 179 контроллером 6 сигнала Va выходного напряжения, который подают на пьезоэлектрический привод 4.
Если имеет место изменение фактического положения d2 или измеренного перемещения d относительно требуемого перемещения d1, то есть d1≠d2 или d1≠d, то контроллер 6 подает сигнал Va выходного напряжения по линии 7 связи на пьезоэлектрический привод 4 для уменьшения или увеличения силы, приложенной к платформе 3, а следовательно, силы нагрузки на платформу, таким образом регулируя положение платформы 3. Таким образом, площадка 1 преимущественно способна динамически корректировать положение платформы без неблагоприятного воздействия на нее шумов датчика. Это возможно потому, что на частотах выше переходной частоты ωc, пьезопреобразователь 5 имеет более широкую полосу частот и генерирует намного меньше шума, чем стандартные датчики положения, такие как индуктивный и емкостный датчики положения. На нулевой частоте и частотах ниже переходной частоты ωc датчик 151 перемещения обеспечивает высокий уровень стабильности и имеет лучшие тепловые и дрейфовые характеристики, чем пьезоэлектрические датчики. Фактически система 150 и способ 170 используют лучшие свойства каждого сигнала.
Альтернативно или дополнительно к регулировке положения, на шаге 180 контроллер 6 обрабатывает измеренную силу нагрузки в петле обратной связи для увеличения коэффициента затухания ξ для площадки 150. Как рассмотрено выше, это пропорционально увеличивает коэффициент усиления обратной связи и полосу частот обратной связи. Таким образом, площадка 150 способна работать в большей полосе частот обратной связи при удовлетворении условию стабильности системы с обратной связью в соответствии с уравнением (2).
Хотя сигнал d перемещения получен с использованием датчика 150 физического перемещения, вместо этого сигнал d перемещения может быть выведен с помощью оценки, вычисленной по входному напряжению Va и реакции системы с разомкнутой петлей обратной связи. Это может быть применимо там, где датчик физического перемещения не доступен или для системы не требуется высокого уровня точности на нулевой частоте. Еще один вариант выполнения настоящего изобретения показан на фиг. 16, который заявитель назвал низкочастотным байпасом с использованием оценочного сигнала перемещения, описанного выше, при этом сходные элементы обозначены одинаковыми позициями. Как показано на фиг. 16а, петля 180 аналогична петле 160, изображенной на фиг. 14а, за исключением того, что в комплементарных фильтрах FH и FL вместо измеренного выходного напряжения Vs силы нагрузки подставляют оценочное перемещение d на частотах ниже переходной частоты ωc. Таким образом, в варианте выполнения настоящего изобретения, представленном на фиг.16, измеренная сила нагрузки также используется для управления слежением на частотах выше переходной частоты ωc и/или для управления затуханием, как на фиг. 14, но не используется никакого измеренного значения или датчика перемещения. Сигнал Va требует той же самой чувствительности по Vs, поэтому константа λ масштабирования равна
Если λ выбрана правильно, реакция системы с обратной связью и характеристики стабильности являются теми же, что рассмотренные выше, как лучше всего видно на частотной характеристике системы с замкнутой обратной связью, изображенной на фиг.16b. Главным преимуществом от устранения датчика физического перемещения является снижение шумов. Плотность шумов позиционирования системы с замкнутой обратной связью, показанная на фиг. 16c, теперь составляет:
что на порядки ниже, чем для других контроллеров. Технология обратной связи по силе с низкочастотным байпасом открывает возможность создания систем нанопозиционирования с большим диапазоном перемещения, широкой полосой частот и разрешающей способностью на субатомном уровне. Такие параметры были продемонстрированы экспериментально в примерах, описанных ниже. Главной отрицательной стороной устранения датчика физического перемещения является то, что линейность теперь зависит только от пьезоэлектрического датчика силы и константы kf упругости гибких связей, которые имеют меньшую достоверность. Кроме того, нет контроля ползучести. Хотя эти недостатки могут препятствовать использованию предлагаемой технологии в некоторых приложениях, другие приложения, в которых требуется разрешающая способность на субатомном уровне в широком диапазоне частот, могут сильно выиграть, например, в зондовой микроскопии с датчиком, сканирующим с частотой телевизионной развертки.
Реакция системы с обратной связью для обеих петель управления на фиг.14а и 16а:
Входной сигнал uff прямой связи может быть использован в качестве опции для улучшения реакции системы с обратной связью, как показано на фиг. 14а и 16а. Прямая связь на основе инверсии обеспечивает лучшие рабочие характеристики, но дополнительная степень усложнения нежелательна для аналоговых устройств. Соответственно, базовая, но эффективная форма компенсации с использованием прямой связи заключается просто в использовании обратного коэффициента усиления на нулевой частоте в качестве фильтра ввода прямой связи, то есть:
Это легко осуществить и позволяет обеспечить уменьшение инерционности слежения.
При входном сигнале прямой связи передаточная функция для обратной связи с двумя датчиками и контроллером для низкочастотного байпаса равна:
Для оценки рабочих характеристик интегрального контроллера C согласно вариантам выполнения настоящего изобретения, показанным на фиг.13-16, их сравнивали с базовым интегральным контроллером слежения с петлей обратной связи по перемещению и прямым контроллером слежения C с петлей обратной связи по внутренней силе для управления затуханием, как показано на фиг.5а. При этом сравнении интегральный контроллер C был настроен для обеспечения наилучших рабочих характеристик без учета запасов стабильности. Контроллер C имеет такие же коэффициенты усиления обратной связи, как получено и рассмотрено выше. Низкочастотный дрейф, вводимый емкостью датчика и буферным входным сопротивлением, был устранен с использованием комплементарных фильтров с граничной частотой 1 Гц. Сигнал d вычислялся по чувствительности позиционирования платформы 3 без обратной связи.
Частотные характеристики системы с замкнутой обратной связью для этих трех контроллеров представлены на фиг.17. На графике частотной зависимости амплитуды линия 200 является частотной характеристикой базового контроллера, линия 201 - частотной характеристикой прямого контроллера слежения и линия 202 - частотной характеристикой контроллера C с IFF (с использованием петли с двумя датчиками или низкочастотного байпаса). Как рассмотрено выше, если λ выбрана правильно, реакция системы с обратной связью и характеристики стабильности низкочастотного байпаса и петли с двумя датчиками - одинаковы. График амплитуды реакции указывает, что контроллеры, использующие обратную связь по силе (прямое слежение или IFF) в соответствии с вариантами выполнения настоящего изобретения, показанными на фиг.5 и 13-16, обеспечивают полосу частот, близкую к резонансной частоте системы, которая соответствует частотной характеристике системы с разомкнутой обратной связью, благодаря высокому коэффициенту усиления в петле обратной связи. Кроме того, при сравнении со стандартным контроллером (линия 200), можно заметить, что контроллеры, использующие обратную связь по силе, обеспечивают исключительные рабочие характеристики, особенно при учете больших запасов по стабильности и простоты контроллера.
Для сравнения полоса частот и запас по стабильности для этих трех контроллеров сведены в таблицу 2.
На фиг.18 представлено сравнение частотной характеристики базового контроллера с замкнутой петлей обратной связи, контроллера прямого слежения, интегрального контроллера с использованием IFF с двумя датчиками или низкочастотным байпасом, которое производилось с использованием эталонного треугольного сигнала с частотой 500 Гц, который показан линией 300. Линия 301 является реакцией системы 1 без обратной связи, линия 302 - частотной характеристикой интегрального контроллера с использованием IFF с двумя датчиками или низкочастотным байпасом, линия 303 - частотной характеристикой контроллера прямого слежения, а линия 304 - частотной характеристикой базового интегрального контроллера. Из графика видно, что рабочая частота находится вне возможностей базового интегрального контроллера, что показано линией 304. Однако контроллер с использованием IFF с двойным датчиком или низкочастотным байпасом (линия 302) обеспечивает достаточный диапазон частот для достижения хороших рабочих характеристик по слежению, даже если входная частота только в 10 раз ниже резонанса системы, что показано относительной близостью линии 302 к опорной линии 300 и линии 301 без обратной связи. Контроллер прямого слежения, использующий измеренную силу нагрузки для управления затуханием (линия 303), также дает адекватный диапазон частот для улучшенных рабочих характеристик слежения, но имеет большую инерционность слежения.
Таким образом, примеры, использующие варианты выполнения настоящего изобретения, которые включают петлю обратной связи с двумя датчиками, с использованием силы и перемещения в качестве переменных обратной связи, демонстрируют эффективность предложенного контроллера слежения и затухания, составляющих способ и систему согласно настоящему изобретению. Преимущественно, этот вариант выполнения настоящего изобретения превосходит высокочастотную характеристику пропускания, присущую пьезоэлектрическим датчикам на низких частотах, путем замены низкочастотного сигнала силы измерением перемещения или сигналом перемещения, оцениваемым на основе динамики системы без обратной связи. В частности, интегральный контроллер с обратной связью по силе с двумя датчиками/байпасом на низких частотах в этом варианте выполнения настоящего изобретения обеспечивает полосу частот с замкнутой петлей обратной связи, приближающуюся к резонансной частоте системы без обратной связи, сохраняя при этом бесконечный запас по коэффициенту усиления и запас по фазе 90°. Для сравнения, базовый интегральной контроллер с обратной связью по перемещению обеспечивает только 1% от полосы частот с запасом по коэффициенту усиления только 5 дБ.
Ниже описан пример варианта выполнения настоящего изобретения со ссылками на фиг.19 и 20. Конфигурация с петлей и двумя датчиками, изображенная на фиг.15, была применена к широкополосной поперечной платформе нанопозиционирования, предназначенной для зондовой микроскопии, со скоростью сканирования с частотой телевизионной развертки, как показано на фиг. 19а. Это устройство представляет собой линейный кинематический прибор с двумя перемещаемыми площадками, обе подвешены на тонких гибких связях и приводятся в действие непосредственно 10-миллиметровыми пакетными приводами. Малая площадка расположена в центре и предназначена для частот сканирования до 5 кГц, то есть является достаточно быстрой и имеет резонансную частоту 29 кГц. Большая площадка обеспечивает перемещение вдоль соседней оси и ограничена резонансной частотой 1,5 кГц. Поскольку эта площадка работает с треугольными траекториями до 100 Гц, необходимо активное управление. Главным приложением для этой платформы нанопозиционирования является высокоскоростная сканирующая зондовая микроскопия, в которой самыми необходимыми рабочими характеристиками являются высокая разрешающая способность и широкий диапазон частот.
Платформа механически подобна системе, изображенной на фиг.13. Основное различие заключается в существовании мод с более высокими частотами, чем первая резонансная частота. Они видны на частотной характеристике системы без обратной связи, показанной на фиг.20а. Хотя для простоты рассмотрена система с единственной модой, очевидно, что способ и система согласно настоящему изобретению легко применимы и для резонансных мод более высоких порядков. Было обнаружено, что IFF особенно подходит для систем с резонансами высоких порядков. Это происходит благодаря большому передаточному члену в уравнении (25), который обеспечивает упорядочение нулей и полюсов независимо от порядка системы. Следовательно, превосходные характеристики стабильности не ухудшаются из-за существования резонансных мод более высоких порядков.
В платформе нанопозиционирования имеются два установленных датчика: емкостный датчик ADE Tech 2804 и пьезоэлектрический датчик силы. Были протестированы два типа пьезоэлектрических датчиков силы, стандартный плоский датчик, показанный на фиг.19b, и специализированный пакетный привод с интегрированным датчиком силы, как показано на фиг. 19с. Плоский датчик содержит только один слой из пьезоэлектрика с металлическими электродами на верхней и нижней поверхностях. Пакетный привод имеет размеры 5×5×10 мм и изготовлен датской компанией Noliac A/S. Этот датчик механически более прочен, чем плоский датчик, и благодаря большей емкости менее чувствителен к токовым шумам. Привод приводится в действие высоковольтным усилителем, который специально разработан автором изобретения.
На фиг.20а показана реакция 7-го порядка; было проверено, что предложенная модель с одним входом и двумя выходами близко описывает реакцию системы. С использованием кривой корневого годографа было определено, что оптимальный коэффициент усиления управления равен β=7800. Контроллер был выполнен в виде аналоговой схемы вместе с комплементарными фильтрами с частотой сопряжения 1 Гц. Благодаря простоте петли управления использование аналоговых элементов является естественным и имеет преимущество, заключающееся в отсутствии шумов квантования, конечной разрешающей способности и задержек на выборки, связанных с цифровыми контроллерами.
Частотная характеристика системы с обратной связью показана на фиг.20b и демонстрирует значительное подавление первых трех мод на 24, 9 и 4 дБ. В дополнение к экспериментальным данным также показана смоделированная реакция, что указывает на близкую корреляцию. Полоса частот слежения в системе с замкнутой петлей составляет 2,07 кГц, что выше, чем резонансная частота системы без обратной связи, и значительно выше, чем полоса частот, достижимая для контроллера прямого слежения, для которого прогнозируемое значение составляет 210 Гц с запасом по коэффициенту усиления 5 дБ. Другим значительным преимуществом пьезоэлектрического датчика силы являются чрезвычайно низкие аддитивные шумы.
Таким образом, в вариантах выполнения настоящего изобретения в систему нанопозиционирования добавлен датчик силы, предназначенный для измерения силы нагрузки, прикладываемой к платформе, и, таким образом, позволяющий контроллеру использовать измеренную силу нагрузки для управления положением платформы и/или для подавления резонансных частот системы. В случае управления положением платформы измеренная сила нагрузки используется для вычисления перемещения платформы. Это позволяет адаптировать контроллер затухания с широкой полосой частот в исключительно высококачественный контроллер слежения, не жертвуя запасами по стабильности. Кроме того, в качестве датчика силы может использоваться пьезоэлектрический датчик, в результате чего генерируется меньше шумов, обусловленных датчиком, по сравнению с существующими датчиками перемещения.
Что касается управления затуханием, получающаяся передаточная функция от приложенного напряжения к измеренной силе нагрузки демонстрирует упорядочение полюсов и нулей, что сильно упрощает разработку и применение контроллера затухания, позволяя достичь исключительного затухания с помощью простого интегрального контроллера без какого-либо ухудшения коэффициента усиления. Таким образом, система согласно изобретению является устойчивой при теоретически бесконечном запасе по коэффициенту усиления и запасе 90° по фазе. Другие выдающиеся характеристики включают гарантированную стабильность и нечувствительность к изменениям резонансной частоты.
В частности, увеличение полосы частот и разрешающей способности, предлагаемые согласно изобретению, в комбинации с простой реализацией и высоким уровнем надежности, позволяют использовать системы нанопозиционирования согласно изобретению в новом спектре быстродействующих приложений. Например, из-за недостатков, связанным с управлением с обратной связью, в быстродействующих сканирующих зондовых микроскопах в настоящее время используются устройства нанопозиционирования без обратной связи. Благодаря простоте и диапазону частот, получаемым согласно изобретению, в таких приложениях теперь можно использовать управление с обратной связью с соответствующими преимуществами в виде лучшей линейности, меньших вибраций и уменьшения возмущений. Во всех этих отношениях изобретение обеспечивает практические и коммерческие значительные усовершенствования по сравнению с известными техническими решениями.
Хотя настоящее изобретение было описано на конкретных примерах, очевидно, что оно может быть воплощено во множестве других форм.
Реферат
Изобретения относятся к измерительной технике, в частности к способу и системе нанопозиционирования объекта. Система содержит неподвижное основание, опору для объекта, привод для приложения силы с целью перемещения опоры относительно неподвижного основания, датчик для измерения силы нагрузки на опору и контроллер для обработки измеренной силы нагрузки с целью управления положением опоры и/или для подавления по меньшей мере одной резонансной частоты системы. Кроме того, предлагается способ управления такой системой. Технический результат заключается в повышении точности позиционирования, уменьшении времени установки и увеличении скорости сканирования. 2 н. и 41 з.п. ф-лы, 20 ил., 2 табл.
Формула
неподвижное основание;
опору для объекта;
привод для приложения силы для перемещения опоры относительно неподвижного основания;
датчик для измерения силы нагрузки, действующей на опору; и
контроллер для обработки измеренной силы нагрузки для подавления, по меньшей мере, одной резонансной частоты системы.

где d - перемещение опоры;
F - измеренная сила нагрузки;
Mp - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.

где d - перемещение опоры;
Vs - выходное напряжение, соответствующее измеренной силе нагрузки;
F - измеренная сила нагрузки;
gs - коэффициент передачи датчика силы;
Mp - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.

где ωc - переходная частота;
ωco - граничная частота;
Rin - входное сопротивление буфера напряжения и
C - емкость датчика силы.
приведение в действие привода для приложения силы для перемещения опоры относительно неподвижного основания;
измерение силы нагрузки на опору и
обработку измеренной силы нагрузки для управления положением опоры и/или для подавления, по меньшей мере, одной резонансной частоты системы.
где d - перемещение опоры;
F - измеренная сила нагрузки;
Mp - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.
где d - перемещение опоры;
Vs - выходное напряжение, соответствующее измеренной силе нагрузки;
F - измеренная сила нагрузки;
gs - коэффициент передачи датчика силы;
Mp - масса опоры;
s - параметр преобразования Лапласа;
cf - коэффициент затухания гибкой связи и
kf - жесткость гибкой связи.
где ωc - переходная частота;
ωcо - граничная частота;
Rin - входное сопротивление буфера напряжения и
C - емкость датчика силы.
Комментарии