Сканирующий зондовый микроскоп и способ выявления близости его зондов - RU2526295C2
Код документа: RU2526295C2
Чертежи








































Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к сканирующему зондовому микроскопу, имеющему множество зондов, и к способу выявления близости этих зондов. В частности, оно относится к сканирующему зондовому микроскопу для регулирования расстояния между поверхностью образца и кончиком зонда способом силы сдвига и к способу для выявления близости его зондов.
Предшествующий уровень техники
Сканирующая зондовая микроскопия (SPM) представляет собой методику измерения в наномасштабе профиля поверхности образца или разнообразных физических свойств и функциональных зависимостей поверхности образца путем сканирования поверхности образца заостренным зондом. В последние годы были разработаны сканирующие зондовые микроскопы, имеющие множество зондов с целью более точного измерения профиля поверхности и разнообразных физических свойств и функциональных зависимостей образца.
В таком сканирующем зондовом микроскопе, имеющем множество зондов, обычно используется оптический микроскоп или электронный микроскоп для перемещения множества зондов в положение измерения на поверхности образца (см. патентный документ 1).
В сканирующем близкопольном оптическом микроскопе (SNOM), который представляет собой вид сканирующего зондового микроскопа, свет ближнего поля генерируется вокруг зонда, расположенного около образца, и измеряется интенсивность света или оптические характеристики рассеянного света, генерированного взаимодействием между зондом и поверхностью образца, для выявления состояния поверхности образца. Очень важно точно выявлять расстояние между поверхностью образца и кончиком зонда и точно регулировать положение кончика зонда для реализации разрешающей способности вне дифракционного предела света.
ДОКУМЕНТ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Патентный документ
Патентный документ 1: JP-A 2008-14903
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Проблема, подлежащая решению изобретением
В SNOM расстояние между поверхностью образца и кончиком зонда или расстояние между зондами иногда устанавливается так, чтобы быть меньше, чем дифракционный предел света. В таком случае, невозможно регулировать положение кончика зонда путем его контролирования с использованием оптического микроскопа. Хотя электронный микроскоп может использоваться для наблюдения за расстоянием между поверхностью образца и кончиком зонда или расстоянием между зондами, это трудно и требует затрат времени.
В SNOM с одним зондом, расстояние между кончиком зонда и поверхностью образца регулируется путем использования взаимодействия (силы сдвига), которое происходит между ними, когда кончик зонда и поверхность образца находятся близко друг к другу. Однако данный способ регулирования нельзя использовать в SNOM, имеющем множество зондов, потому что когда зонды находятся близко друг к другу, имеется влияние силы сдвига между зондами, которая препятствует индивидуальному регулированию положения каждого зонда.
Проблема, подлежащая решению настоящим изобретением, заключается в предоставлении сканирующего зондового микроскопа, способного точно регулировать относительное расстояние среди множества зондов, и способа выявления близости его зондов.
Средства для решения проблемы
Настоящее изобретение было разработано для решения описанной выше проблемы, и первый аспект настоящего изобретения относится к сканирующему зондовому микроскопу, имеющему первый зонд и второй зонд, которые оба предназначены для сканирования образца при поддержании постоянного расстояния до поверхности образца, причем сканирующий зондовый микроскоп содержит:
a) первый сканер для перемещения первого зонда относительно образца;
b) второй сканер для перемещения второго зонда относительно образца;
c) вибратор для обеспечения вибрации с определенной частотой или первого зонда, или второго зонда;
d) устройство контроля вибраций для контролирования вибрации с определенной частотой первого зонда и второго зонда;
e) детектор близости зонда для выявления близости первого зонда и второго зонда друг к другу на основании изменения, по меньшей мере, любой из вибрации первого зонда или вибрации второго зонда; и
f) регулятор для регулирования первого сканера и второго сканера на основании результата выявления детектором близости зонда.
Число первых зондов не ограничивается одним, а может быть многочисленным. Аналогичным образом, число вторых зондов может быть одно или более чем одно.
В первом аспекте настоящего изобретения вибратор может обеспечивать вибрацию первого зонда; а детектор близости зонда может выявлять близость первого зонда и второго зонда друг к другу на основании того, что величина изменения вибрации первого зонда равна или меньше, чем пороговая величина. Альтернативно, детектор близости зонда может выявлять близость первого зонда и второго зонда друг к другу на основании того, что величина изменения вибрации второго зонда превышает пороговую величину.
Второй аспект настоящего изобретения относится к определенному типу сканирующего зондового микроскопа в соответствии с первым аспектом настоящего изобретения, где
первый зонд и второй зонд прикреплены к первому резонатору камертонного типа и второму резонатору камертонного типа, и сканеры перемещают каждый из первого зонда и второго зонда при резонировании каждого из резонаторов камертонного типа, и сканирующий зондовый микроскоп включает в себя:
детектор напряжения для выявления сигнала напряжения, индуцированного в каждом из резонаторов камертонного типа, когда кончик первого зонда и кончик второго зонда отдельно приближаются к поверхности образца; и
регулятор расстояния между зондом и образцом для стабилизации расстояния между кончиком каждого зонда и поверхностью образца на основании результата выявления детектором напряжения.
В третьем аспекте настоящее изобретение относится к сканирующему зондовому микроскопу, имеющему первый зонд и второй зонд, которые оба предназначены для сканирования образца при поддержании постоянного расстояния до поверхности образца, причем сканирующий зондовый микроскоп включает в себя:
a) первый резонатор камертонного типа, к которому прикреплен первый зонд;
b) второй резонатор камертонного типа, к которому прикреплен второй зонд;
c) сканер для перемещения каждого из первого зонда и второго зонда относительно образца при резонировании каждого из первого резонатора камертонного типа и второго резонатора камертонного типа;
d) вибратор для обеспечения вибрации с определенной частотой или первого зонда, или второго зонда;
e) детектор сигналов для выявления сигнала напряжения определенной частоты, индуцированного в каждом из резонаторов камертонного типа, когда первый зонд и второй зонд приближаются друг к другу, в то время как вызывается резонанс каждого из первого резонатора камертонного типа и второго резонатора камертонного типа; и
f) детектор близости зонда для выявления близости первого зонда и второго зонда друг к другу на основании сигнала напряжения определенной частоты, индуцированного в каждом из первого резонатора камертонного типа и второго резонатора камертонного типа.
В третьем аспекте настоящего изобретения детектор близости зонда может предпочтительно выявлять близость первого зонда и второго зонда друг к другу на основании произведения сигнала напряжения определенной частоты, индуцированного в первом резонаторе камертонного типа, и сигнала напряжения определенной частоты, индуцированного во втором резонаторе камертонного типа.
Альтернативно, в третьем аспекте настоящего изобретения детектор близости зонда может выявить близость первого зонда и второго зонда друг к другу на основании суммы сигнала напряжения определенной частоты, индуцированного в первом резонаторе камертонного типа, и сигнала напряжения определенной частоты, индуцированного во втором резонаторе камертонного типа.
Во втором и третьем аспектах настоящего изобретения определенная частота может предпочтительно отличаться от резонансной частоты резонатора камертонного типа.
Четвертый аспект настоящего изобретения относится к способу выявления близости зондов сканирующего зондового микроскопа, имеющего первый зонд и второй зонд, которые оба предназначены для сканирования образца при поддержании постоянного расстояния до поверхности образца, причем способ содержит этапы, на которых:
обеспечивают вибрацию определенной частоты или первого зонда, или второго зонда; и
выявляют близость первого зонда и второго зонда друг к другу путем выявления вибрации определенной частоты, которая передается от первого зонда ко второму зонду.
В частности, предпочтительно, чтобы близость первого зонда и второго зонда друг к другу выявлялась на основании изменения, по меньшей мере, или вибрации определенной частоты первого зонда, или вибрации определенной частоты второго зонда.
Пятый аспект настоящего изобретения относится к способу выявления близости зондов сканирующего зондового микроскопа, имеющего первый зонд и второй зонд, которые оба предназначены для сканирования образца при поддержании постоянного расстояния до поверхности образца, в котором:
первый зонд прикреплен к первому резонатору камертонного типа;
второй зонд прикреплен ко второму резонатору камертонного типа;
обеспечивают вибрацию определенной частоты или первого зонда, или второго зонда; и
выявляют близость первого зонда и второго зонда друг к другу на основании сигнала напряжения определенной частоты, индуцированного в каждом из первого резонатора камертонного типа и второго резонатора камертонного типа.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
При сканировании поверхности образца множеством зондов, когда множество зондов перемещаются ближе друг к другу, между зондами возникает взаимодействие, называемое «силой сдвига». Данное взаимодействие влияет на состояние вибрации каждого зонда. В сканирующем зондовом микроскопе по настоящему изобретению, при перемещении первого и второго зонда, вибрация определенной частоты подается на один из этих зондов, и вибрация определенной частоты контролируется для обоих зондов. Близость этих зондов выявляется на основании изменения вибрации определенной частоты, по меньшей мере, в одном из этих зондов. Поэтому, можно предотвратить столкновение первого и второго зондов в то время, когда данные зонды перемещаются.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой схематический чертеж компоновки сканирующего близкопольного оптического микроскопа в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 2 представляет собой схему для объяснения вибрации, подаваемой на первый и второй зонды.
На фиг. 3 показана форма волн вибрации, подаваемой на первый зонд.
Фиг. 4 представляет собой схему, показывающую последовательность обработки пьезоэлектрического сигнала, генерированного вибрацией кварцевого резонатора каждого зонда в способе регулирования двухполосной модуляцией.
Фиг. 5A представляет собой концептуальную схему регулирования первого и второго зондов.
На фиг. 5B, 5C и 5D показано событие, возникновение которого ожидается, когда должным образом не выполняется регулирование первого и второго зондов.
На фиг. 6A, 6B и 6C показан результат обоснования способа регулирования двухполосной модуляцией, когда первый зонд перемещается ближе ко второму зонду: фиг. 6A иллюстрирует соотношение между положением (x) по X-оси координат первого зонда и положением (z) по Z-оси координат первого и второго зондов; фиг. 6B иллюстрирует соотношение между положением (x) по X-оси координат первого зонда и амплитудой резонансной вибрации первого и второго зондов; и фиг. 6C иллюстрирует соотношение между положением (x) по X-оси координат первого зонда и амплитудой модулированной вибрации первого и второго зондов.
На фиг. 7A, 7B и 7C показан другой результат обоснования, соответствующий фиг. 6A, 6B и 6C.
На фиг. 8 показана траектория, описанная первым зондом, когда область около кончика второго зонда сканировалась первым зондом при избегании столкновения с кончиком второго зонда.
На фиг. 9A и 9B показан результат обоснования, когда область около кончика второго зонда сканировалась первым зондом. На фиг. 9A иллюстрируется полученное сканирующим электронным микроскопом (SEM) изображение кончиков зондов; и фиг. 9B иллюстрирует траекторию первого зонда.
На фиг. 10A и 10B показан другой результат обоснования, соответствующий фиг. 9A и 9B.
На фиг. 11A и 11B показан результат обоснования, когда область около кончика второго зонда сканировалась первым зондом. На фиг. 11A показано полученное SEM-изображение каждого из кончиков зондов; и на фиг. 11B показана карта модулированных сигналов каждого из кончиков зондов.
На фиг. 12A и 12B показан результат обоснования, когда область около кончика второго зонда сканировалась первым зондом. На фиг. 12A показано полученное SEM-изображение каждого из кончиков зондов; и на фиг. 12B показана карта модулированных сигналов первого зонда.
На фиг. 13A и 13B показан другой результат обоснования, соответствующий фиг. 12A и 12B.
На фиг. 14 показана оптическая система SNOM в соответствии с одним вариантом осуществления настоящего изобретения.
На фиг. 15 показан пример оптической системы SNOM для выполнения измерения в режиме двойного IC.
На фиг. 16 показан пример оптической системы SNOM для выполнения измерения в режиме I.
На фиг. 17 показан пример оптической системы SNOM для выполнения измерения в режиме IC.
На фиг. 18 показана фотография зонда I, зонда C и измеряемого образца.
На фиг. 19A показана карта интенсивности люминесценции рекомбинационной люминесценции, когда были возбуждены носители с одиночной квантовой ямой (SQW), а на фиг. 19B показана карта длины волн пика люминесценции рекомбинационной люминесценции, когда были возбуждены носители с одиночной квантовой ямой (SQW).
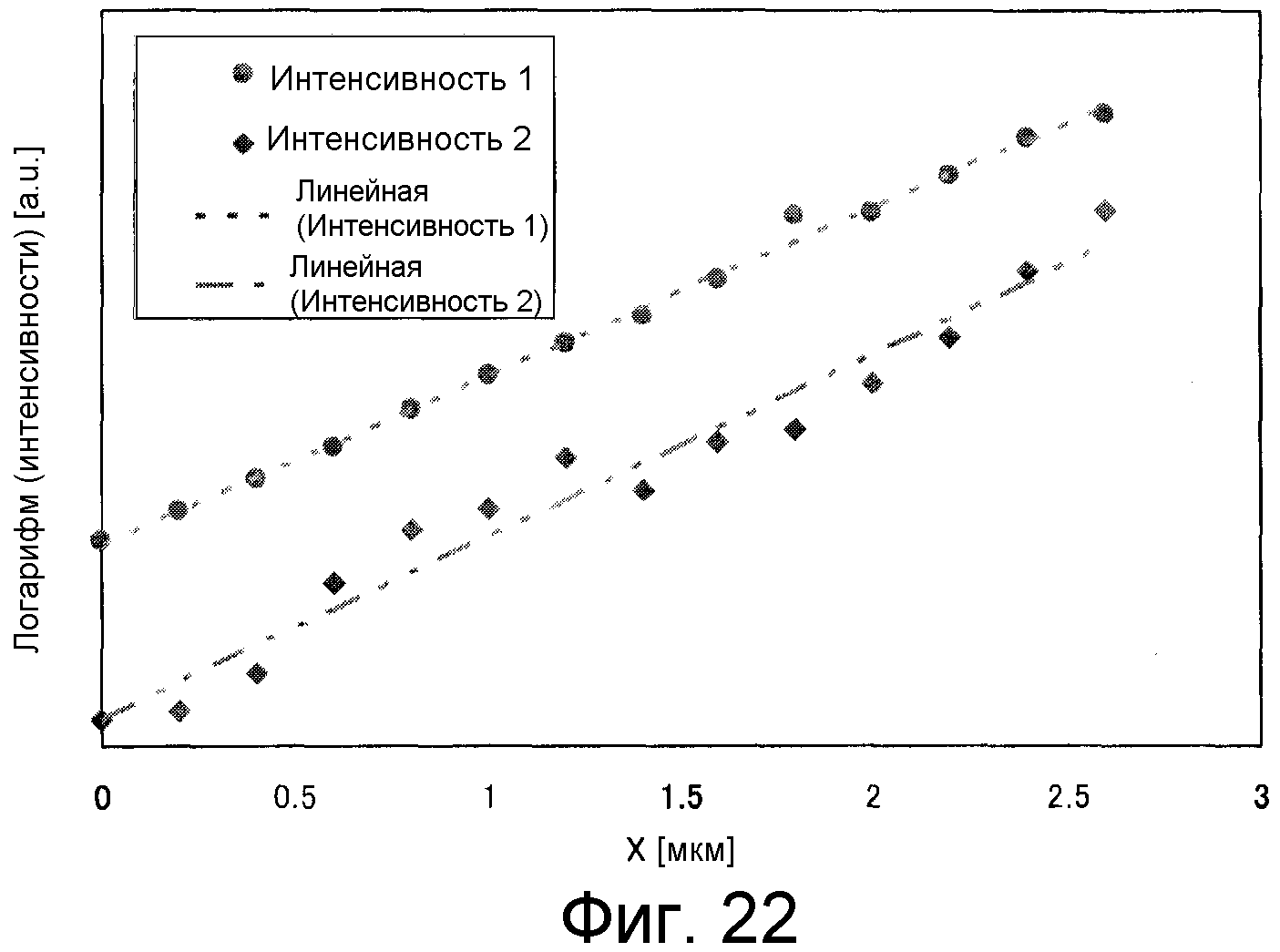
Фиг. 20 представляет собой график, показывающий профиль линии 1 на фиг. 19A и 19B.
Фиг. 21 представляет собой график, показывающий профиль линии 2 на фиг. 19A и 19B.
Фиг. 22 представляет собой график, на котором вертикальная ось интенсивности люминесценции каждой из фиг. 20 и 21 переведена на логарифмическую шкалу.
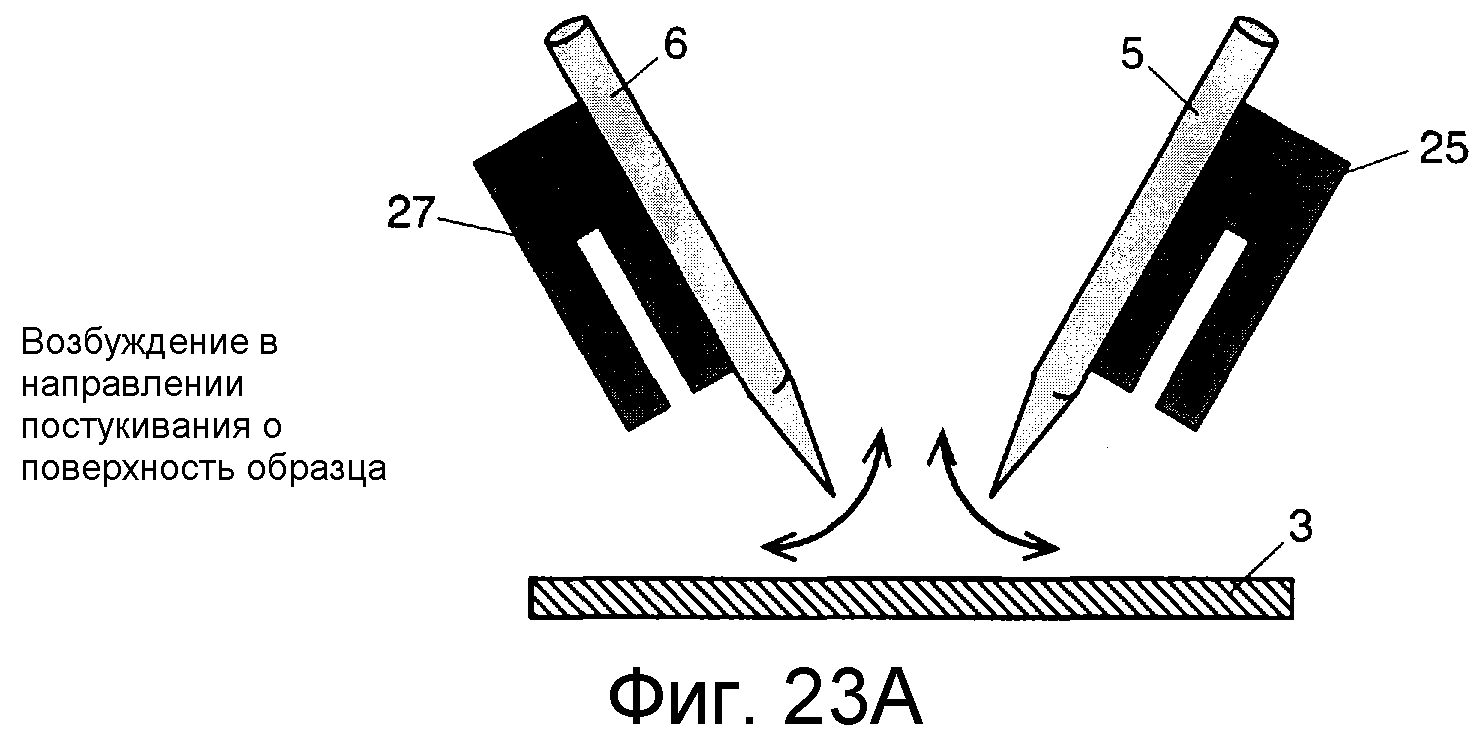
Фиг. 23A, 23B и 23C представляют собой схемы для объяснения расположения кварцевых резонаторов относительно зондов во втором варианте осуществления настоящего изобретения: Фиг. 23A иллюстрирует расположение кварцевых резонаторов первого варианта осуществления; и каждая из фиг. 23B и 23C иллюстрирует расположение кварцевых резонаторов второго варианта осуществления.
Фиг. 24 представляет собой схему, соответствующую фиг. 4.
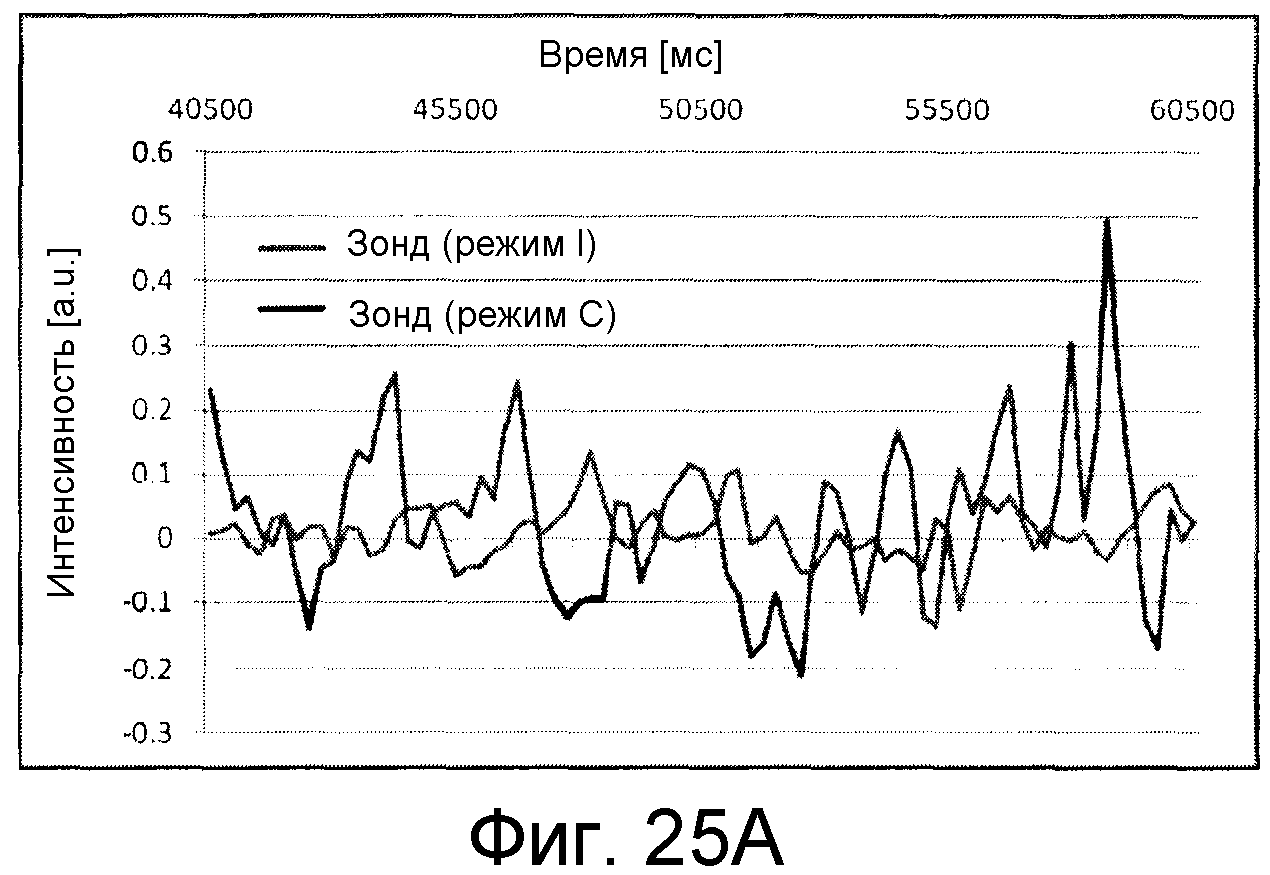
На фиг. 25A и 25B показан результат измерения сигнала, относящегося к расстоянию между зондами, когда эти зонды находились вблизи друг друга: на фиг. 25A показан случай, где два зонда находились на расстоянии друг от друга; а на фиг. 25B показан случай, где два зонда находятся вблизи друг от друга.
На фиг. 26 показано изменение сигналов S3(x) первого и второго зондов и изменение произведения этих сигналов, когда область около кончика второго зонда сканировалась первым зондом.
Фиг. 27 представляет собой диаграмму объяснения способа возвратно-поступательного сканирования.
Фиг. 28 представляет собой изображение поверхности образца (топографическое изображение) при возвратно-поступательном сканировании.
Фиг. 29 представляет собой диаграмму объяснения способа однонаправленного сканирования.
Фиг. 30 представляет собой изображение поверхности образца (топографическое изображение) при однонаправленном сканировании.
НАИЛУЧШИЕ СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее конкретные варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
Первоначально первый вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 1-22. Сканирующий зондовый микроскоп (SPM) в соответствии с настоящим вариантом осуществления представляет собой близкопольный оптический микроскоп (SNOM). Фиг. 1 представляет собой схематический чертеж компоновки сканирующего близкопольного оптического микроскопа в соответствии с настоящим вариантом осуществления. Как показано на фиг. 1, SNOM 1 первого варианта осуществления включает: предметный столик 3, на который помещен образец S; первый зонд 5 и второй зонд 6 для сканирования поверхности образца S; механизм 8 перемещения образца для передвижения предметного столика 3 в направлении XY (горизонтальном) и в направлении Z (вертикальном); механизм 10 перемещения зонда для передвижения первого зонда 5 в направлении XY (горизонтальном) и в направлении Z (вертикальном); механизм 12 регулирования расстояния для регулирования расстояния кончиков первого зонда 5 и второго зонда 6 от образца; источник 14 света для генерирования лазерного света; и блок 16 выявления для выявления сигнального света, испускаемого от образца. Блок 16 выявления включает конденсорную линзу, спектроскоп и прибор с зарядовой связью (ПЗС).
Механизм 8 перемещения образца состоит из механизма 18 точного перемещения, запускаемого пьезоприводом, и механизма 20 грубого перемещения, запускаемого шаговым электродвигателем. Механизм перемещения 8 образца передвигает предметный столик 3 в горизонтальном направлении (XY) и в вертикальном направлении (Z). Блок 22 управления регулирует механизм 8 перемещения образца с тем, чтобы избирательно выполнять относительно большое перемещение механизмом 20 грубого перемещения и микроперемещение механизмом 18 точного перемещения. С помощью данного механизма образец, помещенный на предметный столик 3, может перемещаться в горизонтальном направлении и в вертикальном направлении.
И первый зонд 5, и второй зонд 6 состоят из оптоволоконного зонда, имеющего заостренный кончик, в котором образовано микроотверстие с диаметром, равным или меньшим, чем длина волн, получаемых в виде света ближнего поля. Каждый из оптоволоконных зондов покрыт металлом (например, покрыт золотом (Au)), за исключением их кончиков и отверстий.
Лазерный свет, испускаемый источником 14 света, вводится или в первый зонд 5, или второй зонд 6 от его конца и выходит наружу из микроотверстия кончика зонда для образования света ближнего поля, направляемого на поверхность образца. Тем временем, рассеянный свет и другие типы света, генерируемые на поверхности образца светом ближнего поля, образованным на поверхности образца, вводятся или в отверстие кончика первого зонда 5, или в отверстие кончика второго зонда 6 для направления в блок 16 выявления. Зонд для направления света от источника 14 света на поверхность образца называется зондом освещения (зондом I), а зонд для сбора световых волн, генерируемых на поверхности образца, и направления их в блок 16 выявления называется зондом сбора (зондом C). В SNOM 1 по настоящему варианту осуществления, и первый зонд 5, и второй зонд 6 может использоваться или в качестве зонда I, или зонда C.
Механизм 10 перемещения зонда состоит из механизма 10a точного перемещения, запускаемого пьезоприводом, и механизма 10b грубого перемещения, запускаемого шаговым электродвигателем. Механизм 10 перемещения зонда передвигает первый зонд 5 в горизонтальном направлении (XY) и в вертикальном направлении (Z). Механизм 10a точного перемещения и механизм 10b грубого перемещения соединены с блоком 22 управления. Блок 22 управления избирательно выполняет большое перемещение механизмом 10b грубого перемещения и микроперемещение механизмом 10a точного перемещения. В настоящем варианте осуществления механизм перемещения 8 образца и механизм 10 перемещения зонда функционируют в качестве первого сканера, а механизм 8 перемещения образца функционирует в качестве второго сканера.
Механизм 12 регулирования расстояния регулирует расстояние между кончиком первого зонда 5 и поверхностью образца, а также расстояние между кончиком второго зонда 6 и поверхностью образца путем выявления силы сдвига, действующей между поверхностью образца и каждого из кончиков первого и второго зондов 5 и 6, в то время как первый зонд 5 и второй зонд 6, подвергаясь микровибрации, перемещаются ближе к поверхности образца. В частности, механизм 12 регулирования расстояния состоит из: кварцевых резонаторов 25 и 27 камертонного типа (U-образных); генераторов 29 и 30, соответственно соединенных с кварцевыми резонаторами 25 и 27; и синхронных усилителей 32 и 34. Каждый из кварцевых резонаторов 25 и 27 имеет U-образную структуру, при которой пара осциллирующих тел соединена друг с другом. Пара осциллирующих тел электрически изолирована. Генератор 29 электрически соединен с одним осциллирующим телом кварцевого резонатора 25, а генератор 30 электрически соединен с одним осциллирующим телом кварцевого резонатора 27.
На фиг. 1 зонды (первый зонд 5 и второй зонд 6) прикреплены к осциллирующим телам, с которыми соответственно соединены генераторы (генератор 29 и генератор 30). Однако зонды (первый зонд 5 и второй зонд 6) могут быть прикреплены к осциллирующим телам, с которыми соединены синхронные усилители (синхронный усилитель 32 и синхронный усилитель 34).
Опорный сигнал для выполнения фазового выявления (синхронного выявления) подается из генераторов 29 и 30 в синхронные усилители 32 и 34.
Когда напряжение для вибрации (напряжение переменного тока) подается из генераторов 29 и 30 в осциллирующие тела, осциллирующие тела вибрируют в плоскости, в которой находится U-образная структура эталонного генератора частоты. При синхронизации с этим вибрирует другое осциллирующее тело. При частоте в точке резонанса они резонируют с самой большой амплитудой. В этой точке напряжение, индуцированное в каждом из осциллирующих тел, измеряется в синхронных усилителях 32 и 34 и подается в блок 22 управления.
В данном состоянии кончики зондов 5 и 6 сдвигаются ближе к поверхности образца. Когда расстояние между кончиками зондов 5 и 6 и поверхностью образца не больше, чем определенное значение, то сила сдвига действует на зонды 5 и 6 и уменьшает амплитуду их вибрации, которая также уменьшает амплитуду колебаний осциллирующих тел. По мере того, как амплитуда осциллирующих тел уменьшается, амплитуда напряжения, измеряемая в синхронных усилителях 32 и 34, также уменьшается. Блок 22 управления регулирует механизм 10 перемещения зонда с тем, чтобы поддерживать постоянную амплитуду напряжения, измеренного синхронным усилителем 32, а также регулирует механизм перемещения 8 образца с тем, чтобы поддерживать постоянную амплитуду напряжения, измеренного синхронным усилителем 34. Таким образом, настоящее устройство может передвигать зонды 5 и 6, в то же время поддерживая постоянное расстояние между кончиком зонда 5 и поверхностью образца, а также между кончиком зонда 6 и поверхностью образца.
В SNOM 1 по настоящему варианту осуществления поверхность образца может наблюдаться путем использования и первого зонда 5, и второго зонда 6, или путем использования только одного из них. Режим исследования поверхности образца путем использования или одного из первого зонда 5 и второго зонда 6 в качестве зонда I, а другого зонда в качестве зонда C называется режимом двойного IC. Режим исследования поверхности образца путем использования только одного из первого зонда 5 и второго зонда 6 называется режимом IC, режимом I или режимом C. В режиме IC один зонд служит в качестве зонда IC, который служит в качестве и зонда I, и зонда C; зонд для подачи лазерного света от источника 14 света на поверхность образца также служит в качестве проводника для сбора рассеянного света, генерированного на поверхности образца, и направления его в блок 16 выявления. В режиме C, или первый зонд 5, или второй зонд 6 служит в качестве зонда C; поверхность образца облучается светом из дальнего поля, и рассеянный свет или другие типы света, генерированные на поверхности образца светом, собирается зондом C. В режиме I, или первый зонд 5, или второй зонд 6 служат в качестве зонда I; поверхность образца облучается светом с использованием зонда I, и рассеянный свет или другие типы света, генерированные освещением, широко наблюдаются линзой или другим средством.
Например, в случае, когда образец S представляет собой полупроводник, он может наблюдаться в ранее описанных четырех режимах следующим образом: в режиме C, полупроводник широко облучается светом от дальнего поля для возбуждения носителей, и локальная люминесценция, возникающая в результате рекомбинации носителей, собирается зондом C для исследования. В режиме I полупроводник локально облучается светом, и люминесценция от возбужденных носителей широко наблюдается с помощью линзы. В режиме IC или в режиме двойного IC полупроводник локально возбуждается зондом I или зондом IC, и локально собранный свет люминесценции в результате рекомбинации возбужденных носителей можно наблюдать с помощью зонда C или зонда IC.
В частности, в режиме двойного IC, путем перемещения зонда I и зонда C ближе друг к другу люминесценция от носителей, возбужденных светом от зонда I, может захватываться зондом C. Это обеспечивает возможность исследования направления хода несущих элементов, т.е. траектории хода носителя. По оценкам, длина диффузии носителя в InGaN, который представляет собой вид полупроводника, составляет примерно несколько сотен нм. Для исследования траектории хода носителя InGaN расстояние между первым и вторым зондами 5 и 6 должно составлять менее, чем несколько сотен нм.
Как только что описано, в режиме IC, режиме I и режиме C поверхность образца сканируется одним зондом. В режиме двойного IC поверхность образца сканируется двумя зондами, и поэтому необходимо регулировать расстояние между зондами, а также расстояние между обоими зондами и образцом. В частности, когда два зонда 5 и 6 перемещаются ближе друг к другу, то необходимо регулировать их движение с тем, чтобы они не столкнулись друг с другом. Однако когда расстояние между зондами 5 и 6 составляет не более, чем определенное значение, сила сдвига действует между зондами 5 и 6. Следовательно, при регулировании перемещения зондов 5 и 6 необходимо учитывать влияние силы сдвига.
Учитывая данный фактор, в SNOM 1 по настоящему варианту осуществления, при выполнении измерения в режиме двойного IC, или на первый зонд 5, или на второй зонд 6, например, на первый зонд 5 подается вибрация определенной частоты (которая будет далее в настоящем описании называться «модулированной вибрацией»), которая отличается от резонансной частоты кварцевого резонатора 25. Затем, амплитуда модулированной вибрации выявляется для обоих зондов 5 и 6, и на основании изменения амплитуды определяется, что два зонда 5 и 6 находятся близко друг к другу.
На фиг. 2 показана вибрация, подаваемая на каждый из зондов. В частности, под контролем блока 22 управления механизм 10a точного перемещения запускается с тем, чтобы физически вызвать вибрацию кварцевого резонатора 25 с определенной частотой (100 Гц), которая далека от частоты, близкой к резонансной частоте, составляющей 310 кГц. То есть в настоящем варианте осуществления блок 22 управления несет функцию регулирования перемещения каждого зонда, а также функцию обеспечения колебания одного зонда (кварцевого резонатора) с определенной частотой (100 Гц). Как следствие, первый зонд 5 вибрирует с частотой 30 кГц, которая представляет собой резонансную частоту кварцевого резонатора 25, и одновременно он вибрирует с частотой 100 Гц в направлении, параллельном поверхности образца (горизонтальном направлении). На фиг. 3 показана форма волн вибрации, подаваемой на первый зонд 5. Таким образом, в SNOM 1 по настоящему варианту осуществления первый и второй зонды 5 и 6 изготовлены для вибрации с резонансной частотой, и расстояние между первым зондом 5 и образцом, и расстояние между вторым зондом 6 и образцом, и расстояние (межзондовое расстояние) между первым зондом 5 и вторым зондом 6 регулируются обеспечением модуляции первого зонда 5 физической вибрацией. Такой способ регулирования будет далее называться способом регулирования двухполосной модуляцией.
Фиг. 4 представляет собой схему, показывающую последовательность операций способа регулирования двухполосной модуляцией. На фиг. 4 генератор 22 производит колебания с определенной частотой (100 Гц). Однако обычно, именно блок 22 управления выполняет функцию генерирования колебания с определенной частотой, как описано ранее.
Далее, будет детально описана последовательность операций способа регулирования двухполосной модуляцией.
Например, рассмотрим случай, когда два объекта зонда B и образец (поверхность) находятся поблизости к зонду A. Пусть x и z соответственно представляют расстояние от зонда A до зонда B и расстояние до образца. Когда C представляет амплитуду кварцевого резонатора (эталонного генератора частоты), то действительное колебание может быть выражено в виде
C cos ω1t.
В данном случае предполагается, что связь между C, x и z выражается уравнением
C=fx(x) fz(z).
Функция fx(x) представляет соотношение, относящееся к величине ослабления амплитуды колебаний зонда A, обеспечиваемого зондом B, а функция fz(z) представляет соотношение, относящееся к величине ослабления амплитуды колебаний зонда A, обеспечиваемого поверхностью образца. И fx(x), и fz(z) представляют монотонно уменьшающуюся функцию, а дифференциальные функции fx(x) и fz(z) также монотонно уменьшаются в области, где расстояние между зондами A и B и расстояние между поверхностью образца и зондом A в некоторой степени велико. Когда расстояние x модулируется частотой ωm/2π, и амплитуда представляет α, при условии, что амплитуда α достаточно мала, то fx(x) может быть выражена следующей приближенной формулой:
fx(x)=fx(x0)+afx(x0)cosωmt.
Следовательно, например, пьезоэлектрический сигнал s(x,z,t)(=kCcosω1t) эталонного генератора частоты, генерированный вибрацией кварцевого резонатора 27, будет представлять собой:
s(x,z,t)=kfz(z) (fx(x0)+afx(x0) cosωmt) cosω1t,
где модулированная вибрация и резонансная вибрация накладываются, где k представляет пропорциональную (физическую) константу, представляющую отношение между амплитудой C кварцевого резонатора и сигналом s(x,z,t).
Пьезоэлектрический сигнал s(x,z,t), умноженный на cosω1t опорного сигнала, который синхронизирован с резонансной вибрацией, дает следующее уравнение:

Пропускание данного сигнала через фильтр 221 низких частот (ФНЧ) дает резонансное колебание только того частотного компонента, который такой же как резонансное колебание первого члена, имеющего амплитуду s1(x,z,t).
То есть получается,
s1(x,z,t)=(1/2)kfz(z)(fx(x0)+afx(x0) cosωmt).
Данный сигнал s1(x,z,t) дополнительно содержит компонент модулированного сигнала cosωmt. Данный компонент модулированного сигнала может быть удален пропусканием указанного выше сигнала через другой ФНЧ 222.
То есть получается s1(x,z)=(1/2)kfz(z) fx(x0).
Это дает информацию s1(x,z), относящуюся к расстоянию h между вторым зондом 6 и поверхностью образца и расстояния d между вторым зондом 6 и первым зондом 5.
Между тем, s1(x,z,t), умноженный на компонент модулированного сигнала cosωmt, дает следующее значение:

Пропускание данного сигнала через НЧФ 224 дает только частотный компонент, который является таким же, как модулированный сигнал второго члена (амплитуды s2(x,z) модулированной вибрации).
То есть получается
s2(x,z)=(1/4)k fz(z) afx(x0).
Данный сигнал s2(x,z) также дает информацию о расстоянии h между вторым зондом 6 и поверхностью образца и о расстоянии d между вторым зондом 6 и первым зондом 5. Сигнал s2(x,z), деленный на s1(x,z), дает информацию s2(x) о расстоянии между вторым зондом 6 и первым зондом 5.
То есть получается
s2(x)=(1/2)a [fx(x0)/fx(x0)].
Отражение полученного сигнала s2(x) на s1(x,z) дает информацию s1(z) о расстоянии h между вторым зондом 6 и поверхностью образца.
Предыдущее объяснение было представлено по пьезоэлектрическому сигналу, генерированному вибрацией кварцевого резонатора 27, который прикреплен ко второму зонду 6. То же относится к пьезоэлектрическому сигналу, генерированному вибрацией кварцевого резонатора 25, который прикреплен к первому зонду 5.
На основании информации о расстоянии h между зондом и поверхностью образца и информации о расстоянии d между зондами блок 22 управления выявляет близость первого зонда 5 и второго зонда 6 друг к другу и регулирует механизм 8 перемещения образца и механизм 10 перемещения зонда. Следовательно, в настоящем варианте осуществления синхронные усилители 32 и 34 и блок 22 управления служат в качестве устройства контроля вибраций. Блок 22 управления служит в качестве вибратора, детектора близости зонда и регулятора.
Некоторые эксперименты выполняли для тестирования регулирования первого зонда 5 и второго зонда 6 в способе регулирования двухполосной модуляцией. Тест главным образом выполняли для определения, возможно ли выявление приближения двух зондов. Также исследовалось, возможно ли выявление событий, которые могут произойти, когда выявление приближения не выполнялось, как ожидалось (таких как «недостаточная близость», «столкновение» и «перехлест одним зондом другого зонда»). Фиг. 5A представляет собой концептуальную схему регулирования расстояния между первым и вторым зондами. На фиг. 5B, 5C и 5D показаны события, возникновение которых ожидается, когда регулирование расстояния между первым и вторым зондами не выполняется, как ожидалось. Далее описываются результаты.
Первоначально, первый зонд 5 перемещали ближе ко второму зонду 6 и исследовали изменение вибрации двух зондов (первого зонда 5 и второго зонда 6). Результат показан на фиг. 6A-6C и фиг. 7A-7C, которые иллюстрируют результат теста способа регулирования двухполосной модуляцией. Следует отметить, что на фиг. 7A-7C показан результат теста, отличного от теста, результат которого показан на фиг. 6A-6C. На фиг. 6A и 7A показано соотношение между положением (x) по X-оси координат первого зонда 5 и положением (z) по Z-оси координат каждого зонда, когда первый зонд 5 перемещался ближе ко второму зонду 6. На фиг. 6B и 7B показано соотношение между положением (x) по X-оси координат первого зонда 5 и амплитудой резонансной вибрации каждого из зондов 5 и 6. На фиг. 6C и 7C показано соотношение между положением (x) по X-оси координат и амплитудой модулированной вибрации каждого из зондов 5 и 6. В данных результатах первоначальное положение (произвольное положение относительно поверхности образца) кончика первого зонда 5 считалось началом, а направление от начала до второго зонда 6 считалось положительным направлением (+). Следовательно, чем длиннее ось X координат, тем ближе первый зонд 5 находится ко второму зонду 6.
Все горизонтальные оси на фиг. 6A-6C и фиг. 7A-7C представляют ось X координат первого зонда 5. Вертикальная ось на фиг. 6A и фиг. 7A представляет расстояние (z) от предметного столика 3 до каждого из зондов 5 и 6. Вертикальная ось на фиг. 6B и 7B представляет амплитуду вибрации, полученную вычитанием модулированной вибрации из вибрации кварцевых резонаторов 25 и 27. Вертикальная ось на фиг. 6C и 7C представляет амплитуду модулированного сигнала первого и второго зондов 5 и 6.
Объяснения будут даны со ссылкой на фиг. 6A-6C. Как показано на фиг. 6A, расстояние между первым зондом 5 и предметным столиком 3 и расстояние между вторым зондом 6 и предметным столиком 3 было почти одинаковым и постоянным в обоих случаях, где первый зонд 5 и второй зонд 6 были удалены друг от друга, и где они были вблизи друг от друга. Как показано на фиг. 6B, значение, полученное вычитанием модулированной вибрации из вибрации кварцевого резонатора 25 первого зонда 5 и значение, полученное вычитанием модулированной вибрации из вибрации кварцевого резонатора 27 второго зонда 6, т.е. амплитуды резонансных вибраций были почти постоянными.
С другой стороны, как показано на фиг. 6C, когда первый зонд 5 и второй зонд 6 были удалены друг от друга, модулированный сигнал выявлялся только от первого зонда 5. Данный сигнал больше не выявлялся после остановки модуляции. Это обстоятельство свидетельствует о том, что выявленный посредством этого сигнал исходил непосредственно от первого зонда 5.
Когда первый зонд 5 перемещался ближе ко второму зонду 6, модулированный сигнал выявлялся и от первого, и от второго зондов 5 и 6 (область, охваченная пунктирной окружностью на фиг. 6C). Это свидетельствует о том, что близость первого и второго зонда 5 и 6 друг к другу вызывала распространение модулированного сигнала от первого зонда 5 ко второму зонду 6. Когда модулированный сигнал выявлялся от второго зонда 6, модулированный сигнал, выявленный от первого зонда 5, ослаблялся. Наиболее вероятная причина этого ослабления модулированного сигнала первого зонда 5 состоит в том, что когда первый и второй зонды 5 и 6 находились вблизи друг от друга, на первый зонд 5 также воздействовал второй зонд 6 вследствие взаимодействия первого зонда 5 и второго зонда 6.
Как описано ранее, даже когда первый зонд 5 и второй зонд 6 находились вблизи друг от друга, расстояния (z) от зондов 5 и 6 до предметного столика 3 были почти одинаковыми и постоянными (фиг. 6A). Также, амплитуды резонансной вибрации кварцевого резонатора 25 первого зонда 5 и амплитуда резонансной вибрации кварцевого резонатора 27 второго зонда 6 были почти постоянными (фиг. 6B). Эти результаты показывают, что, даже когда два зонда 5 и 6 находились вблизи друг от друга, и модулированный сигнал первого зонда 5 распространялся до второго зонда 6, один зонд не наползал на другой зонд. Вероятно, что столкновение зондов 5 и 6 удавалось избегать, по меньшей мере, на ранней стадии периода, когда модулированный сигнал выявлялся от второго зонда 6. Это происходило потому, что если бы зонды 5 и 6 столкнулись друг с другом, то амплитуда резонансной вибрации кварцевого резонатора, вероятно, значительно ослабла бы.
В результате теста на фиг. 7A-7C, когда первый зонд 5 перемещался ближе ко второму зонду 6, то ось Z координат (z) зондов 5 и 6 и амплитуда резонансной вибрации кварцевых резонаторов были почти такими же, как результат на фиг. 6A и 6B (см. фиг. 7A и 7B). С другой стороны, как показано на фиг. 7C, ослабление модулированного сигнала первого зонда 5 не наблюдалось, даже если выявлялся модулированный сигнал второго зонда 6, проявляющий тип, отличный от результата, показанного на фиг. 6C.
Результаты, показанные на фиг. 6A-6C и фиг. 7A-7C, свидетельствуют о том, что когда первый и второй зонды 5 и 6 находятся поблизости друг от друга, то возможно выявление их близости на основании одного или обоих из следующих наблюдений: (1) ослабление модулированного сигнала первого зонда 5 и (2) выявление модулированного сигнала через второй зонд 6. В данном случае, например, близость первого и второго зондов 5 и 6 может быть выявлена на основании того, что изменение модулированного сигнала любого одного из первого и второго зондов 5 и 6 превышает заданный порог.
Затем было проверено, возможно ли было сканирование первым зондом 5 области около кончика второго зонда 6, в то же время избегая столкновения с кончиком второго зонда 6. Сначала, в данном проверочном эксперименте первый и второй зонды 5 и 6 визуально выстраивались в направлении Y путем использования оптического микроскопа. На фиг. 8 показана траектория первого зонда, когда область около кончика второго зонда сканировалась первым зондом 5, в то же время, избегая столкновения зондов. На фиг. 8 горизонтальное направление именуется направлением X, а вертикальное направление - направлением Y. На фиг. 8 цифры в кружках показывают порядок перемещения первого зонда 5. Как показано на фиг. 8, повторялись следующие процессы: перемещение первого зонда 5 по направлению X ко второму зонду 6 (приближение), возвращение его, когда было выявлено изменение модулированного сигнала, и перемещение его примерно на 500 нм в направлении Y и затем выполнение другого приближения ко второму зонду 6.
В данном примере уменьшение значения напряжения модулированного сигнала первого зонда 5 до уровня в пределах диапазона от 80 до 90% считалось изменением модулированного сигнала. Нижний предел уменьшения значения напряжения был установлен на 80% во избежание, насколько возможно, столкновения первого зонда 5 и второго зонда 6. Большее количество ослабления модулированного сигнала означает более сильное влияние силы сдвига и, следовательно, меньшее расстояние между двумя зондами. Однако это также означает, что более вероятно сближение зондов до контакта или столкновения друг с другом. Зонды, использованные в данном варианте осуществления, были покрыты золотом, а золотое покрытие легко удаляется вследствие контакта. Если золотое покрытие удаляется, то зонд необходимо заменить. Учитывая данный фактор, для снижения вероятности контакта нижний предел уменьшения значения напряжения был установлен на 80%. Однако если используемые зонды относительно устойчивы к повреждению вследствие контакта, или если отслоение небольшого количества покрытия с зондов не влияет на измерения, то нижний предел может быть установлен приблизительно на 70%.
Верхний предел модулированного сигнала был установлен на 90% для исключения влияния помех. Хотя ослабление модулированного сигнала указывает на то, что сила сдвига начала действовать между двумя зондами, модулированный сигнал может ослабляться помехой даже без действия силы сдвига. Поэтому, если влияние помехи может быть устранено, то верхний предел модулированного сигнала может быть установлен приблизительно на уровень 95%.
На фиг. 9-11 показаны конкретные результаты сканирования первым зондом 5 области около кончика второго зонда 6. На фиг. 9A, 10A и 11A показаны полученные сканирующим электронным микроскопом (SEM) изображения первого зонда 5 и второго зонда 6, использованных для сканирования. На фиг. 9B и 10B показана траектория первого зонда 5 и положение кончика второго зонда 6, которое было выведено из траектории. На фиг. 11B показана величина модулированного сигнала зондов 5 и 6 во время сканирования. На фиг. 9B и 10B для облегчения объяснения траектория первого зонда 5 начерчена в виде линии. Однако в действительности, первый зонд перемещался двумерно при вибрации с периодом 100 Гц и амплитудой 50 нм (между пиками). То есть первый зонд 5 перемещался в направлении оси X, в то же время вибрируя в направлении оси Y.
Как показано на фиг. 9 и 10, по траектории первого зонда 5 было выведено положение кончика второго зонда 6, как указано пунктирной окружностью. Форма линии, соединяющей точки, где был выявлен модулированный сигнал в траектории первого зонда 5, был аналогичен профилю кончика второго зонда. В проверочном эксперименте, показанном на фиг. 9A и 9B, не было обнаружено повреждение на кончике первого и второго зондов 5 и 6 после окончания эксперимента. Это указывает на то, что область около второго зонда 6 успешно сканировалась первым зондом 5 без столкновения зондов 5 и 6. В проверочном эксперименте, показанном на фиг. 10A и 10B, золотое покрытие было частично удалено с кончика первого и второго зондов 5 и 6 после окончания эксперимента, хотя в стеклянной части повреждение не было обнаружено. Это свидетельствует о возможности того, что зонды 5 и 6 вступают в контакт друг с другом во время сканирования первым зондом.
Как понятно из фиг. 11B, когда расстояние между зондами 5 и 6 составляет не более, чем определенное значение (т.е. когда они находятся вблизи друг от друга), модулированный сигнал первого зонда 5 резко ослабляется. Кроме того, было обнаружено, что профиль концевой части второго зонда 6 может быть выведен из формы карты модулированного сигнала первого зонда 5. После эксперимента на концевой части второго зонда 6 было обнаружено большое отслоение золотого покрытия (см. фиг. 11A). Однако карта модулированных сигналов не проявляет свидетельства столкновения двух зондов.
Фиг. 12B иллюстрирует карту модулированных сигналов первого зонда 5, когда сканирование широко выполнялось путем использования зонда, имеющего характерную форму кончика. На карте модуляции уменьшение и увеличение значения напряжения выражено изменяющейся интенсивностью цвета в каждой точке. Самый темный оттенок (черный) указывает на уменьшение на 10% значения напряжения модулированного сигнала, когда два зонда находятся на расстоянии друг от друга, а самый светлый оттенок (серый) указывает на увеличение на 10%.
Как показано на фиг. 12A, концевая часть двух зондов имеет двойную конусную форму с двумя уклонами, простирающимися под различными углами. Двухэтапный градиент наблюдается также на модулированной карте, представленной на фиг. 12B, которая показывает, что можно вывести форму кончика зонда.
На фиг. 13A и 13B, которые соответствуют фиг. 12A и 12B, показан случай, где приближение выполнялся путем использования первого зонда со значительно поврежденным кончиком. Как показано на фиг. 13B, наблюдалась особая форма кончика зонда вследствие повреждения. Кроме того, на карте модулированного сигнала наблюдалось свидетельство столкновения (область, окруженная эллипсом) первого зонда 5 и второго зонда 6.
ПРИМЕРЫ
Далее будет описан результат исследования потока носителей. Исследование выполняли для образца InGaN с одиночной квантовой ямой (SQW) в режиме двойного IC путем использования указанного выше близкопольного оптического микроскопа. В данном эксперименте первый зонд 5 использовали в качестве зонда C, а второй зонд 6 - в качестве зонда I. Исследование выполняли при перемещении первого зонда 5 механизмом 10 перемещения зонда. Регулирование расстояния между первым и вторым зондами 5 и 6 выполняли способом регулирования двухполосной модуляцией, который был описан ранее.
На фиг. 14 показана схема оптической системы близкопольного оптического микроскопа, который использовали для исследования. Оптическая система по настоящему варианту осуществления сконструирована так, чтобы пользователь мог по желанию выбрать любой из режимов измерения среди режима двойного IC, режима IC, режима I и режима C. В режиме двойного IC расположение зонда I и зонда C может изменяться.
В частности, две линзы 101 и 102 и зеркало 103 расположены на пути испускаемого света полупроводникового InGaN лазера 100. Пять зеркал от m1 до m5 и один светоделитель bs расположены в виде матрицы между зеркалом 103 и тремя волоконными держателями от 104 до 106 и спектроскопом 108. Каждый из волоконных держателей от 104 до 106 удерживает оптическое волокно, имеющее зонд на его конце. Каждое из зеркал от m1 до m5 и светоделитель bs, которые расположены в виде матрицы, могут перемещаться в положение вне оптического пути. Фильтр 109 высоких частот (ФВЧ, 430 нм) и линза 110 расположены между спектроскопом 108 и зеркалом m5. ФВЧ 109 используется для отсечки света возбуждения с длиной волны 405 нм, испускаемого из полупроводникового лазера 100. Свет, входящий в спектроскоп 108 через ФВЧ 109 и линзу 110, выявляется охлаждаемым жидким азотом ПЗС (прибором с зарядовой связью) 112.
На фиг. 15 показана оптическая система в режиме двойного IC, при котором зонд C и зонд I соответственно прикреплены к волоконному держателю 106 и волоконному держателю 104, которые расположены на обоих концах. Как показано на фиг. 15, в данном случае три зеркала, отличных от зеркала m1, непосредственно после зеркала 103, и зеркала m5 непосредственно перед ФВЧ 109, и светоделитель расположены вне оптического пути. Следовательно, лазерный свет от полупроводникового лазера 100, вводится в зонд I зеркалом m1, как указано линией L1 из чередующихся длинных и коротких пунктиров. Лазерный свет, вводимый в зонд I, испускается из отверстия в кончике зонда для возбуждения SQW. Тем временем, свечение, собранное зондом C, вводится в ФВЧ 109 зеркалом m5, как указано линией L2 из чередующихся длинных и коротких пунктиров, проходит через спектроскоп 108 и направляется ПЗС 112.
На фиг. 16 и 17 соответственно показан пример оптической системы режима I и режима IC, при которых используется один зонд.
Фиг. 18 представляет собой фотографию, показывающую, как образец измерялся зондом I и зондом C. В момент, показанный на фиг. 18, приближение зонда C еще не было выполнено, но свет возбуждения (лазерный свет) испускается из зонда I справа.
На фиг. 19A и 19B показан результат наблюдения. На фиг. 19A показана карта интенсивности люминесценции, и на фиг. 19B показана карта длины волн пика люминесценции. В данном примере осуществляли приближение зонда C к зонду I, и когда значение напряжения модулированного сигнала от зонда C уменьшалась до 85%, приближение останавливали и зонд C возвращали назад. Затем, после небольшого перемещения в направлении Y снова осуществляли приближение зонда C к зонду I. На фиг. 19A и 19B отсутствуют основные данные. Это связано с тем, что зонд C был возвращен назад из-за ошибочного выявления ослабления модулированного сигнала, которое было вызвано помехой.
На фиг. 20 и 21 показан профиль линий, указанных цифрами в кружках соответственно на фиг. 19A и 19B. Фиг. 20 соответствует цифре «1» в кружке на фиг. 19, а фиг. 21 - цифре «2» в кружке на фиг. 19. На фиг. 22 показан график, на котором вертикальная ось интенсивности люминесценции фиг. 20 и 21 была переведена в логарифмическую шкалу.
На фиг. 19-21 показано, что люминесценция уменьшается по мере увеличения расстояния от точки возбуждения. Это свидетельствует о том, возможно получение прогрессирующего распределения носителей путем использования зонда C. В частности, то обстоятельство, что люминесценция является высокой в области в пределах приблизительно 1 мкм от точки возбуждения, свидетельствует о том, что диффузия носителей от точки возбуждения, возможно, распространилась в данную область.
Далее, второй вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 23-30. Такие же компоненты, как в первом варианте осуществления, указаны такими же цифрами, и объяснения этих компонентов опущены. Объяснения будут даны по пунктам, которые отличаются от первого варианта осуществления.
Второй вариант осуществления значительно отличается от первого варианта осуществления по следующим трем пунктам:
(1) направление амплитуды определенной частоты и расположение кварцевых резонаторов;
(2) последовательность технологических операций способа регулирования двухполосной модуляцией; и
(3) способ зондового сканирования.
В дополнение к указанному выше, настоящий вариант осуществления отличается от первого варианта осуществления тем, что зонды были покрыты алюминием (Al), который тяжелее золота (Au). Однако объяснение в этом отношении опущено, и указанные выше пункты (1)-(3) будут описаны по порядку.
(1) Направление амплитуды определенной частоты и расположение кварцевых резонаторов
На фиг. 23A показано, как первый и второй зонды 5 и 6 вибрируют в первом варианте осуществления. В первом варианте осуществления, как указано стрелками на 23A, каждое направление амплитуды определенной частоты первого и второго зондов 5 и 6 устанавлено в направлении постукивания о поверхность образца. Кварцевые резонаторы 25 и 27 прикреплены к противоположным сторонам от лицевых сторон зондов 5 и 6.
На фиг. 23B и 23C показано, как первый и второй зонды 5 и 6 вибрируют во втором варианте осуществления. Во втором варианте осуществления, как указано стрелками на фиг. 23B и 23C, направление амплитуды определенной частоты первого и второго зондов 5 и 6 устанавливается почти параллельно поверхности образца. Кварцевые резонаторы 25 и 27 прикреплены в положениях, повернутых относительно положений прикрепления в первом варианте осуществления на 90 градусов вокруг зондов 5 и 6. То есть кварцевые резонаторы 25 и 27 были прикреплены к зондам 5 и 6 сбоку.
В настоящем варианте осуществления такое изменение конструкции может устранить режим, при котором зонды 5 и 6 постукивают по образцу, предотвращая прикосновение кончиков зондов 5 и 6 к образцу и их повреждение.
(2) Последовательность операций способа регулирования двухполосной модуляцией
Фиг. 24 представляет собой схему, показывающую последовательность операций способа регулирования двухполосной модуляцией во втором варианте осуществления. Во втором варианте осуществления блок 22 управления выявляет близость зондов 5 и 6 друг к другу на основании произведения d' информации s3(x) о расстоянии d между первым зондом 5 и вторым зондом 6, полученной по пьезоэлектрическому сигналу S(x,z,t) кварцевого резонатора 25, прикрепленного к первому зонду 5, и информации s3(x) о расстоянии d между вторым зондом 6 и первым зондом 5, полученной по сигналу S(x,z,t) кварцевого резонатора 27, прикрепленного ко второму зонду 6. На фиг. 24 генератор производит колебания с определенной частотой (100 Гц). Однако в действительности именно блок 22 управления выполняет функцию колебания с определенной частотой, как в первом варианте осуществления.
В настоящем варианте осуществления резонаторы 25 и 27 камертонного типа, имеющие резонансную частоту примерно 32 кГц (32,7 кГц) соответственно прикреплены к первому и второму зондам 5 и 6. Частота (определенная частота) физической вибрации, подаваемой на первый зонд 5, составляла 100 Гц.
На фиг. 25A и 25B показан результат измерения сигнала s3(x) каждого из зондов 5 и 6, при котором каждый из зондов 5 и 6 постепенно перемещался к другому зонду, причем амплитуда модулированной вибрации определенной частоты (100 Гц) установлена на 25 нм, значение расстояния между пиками - на 50 нм, интервал шага скана - на 25 нм и напряжение, подаваемое на кварцевые резонаторы 25 и 27, на 50 мВ. На фиг 25A показан результат (дальнепольного) измерения, при котором зонды 5 и 6 находились на расстоянии друг от друга, а на фиг. 25B показан результат (близкопольного) измерения, при котором зонды 5 и 6 находились вблизи друг от друга. Вертикальная ось на фиг. 25A и 25B представляет силу сигнала, а горизонтальная ось представляет время (в миллисекундах). Как показано на фиг. 25A и 25B, сигнал s3(x) зондов 5 и 6 колеблется в обоих случаях, когда два зонда 5 и 6 находились на расстоянии друг от друга и вблизи друг от друга. Изменения сигналов s3(x) зондов 5 и 6 синхронизировались друг с другом, когда зонды 5 и 6 находились вблизи друг от друга. При (близкопольном) измерении (фиг. 25B) наблюдаются несколько пиков ослабления сигналов s3(x). Это происходит вследствие повторяющегося перемещения зондов 5 и 6, при котором зонды 5 и 6 перемещались в положение вблизи друг от друга, вызывая ослабление сигналов s3(x), в ответ на которые зонды 5 и 6 временно разделялись и затем снова перемещались ближе друг к другу.
На фиг. 25A и 25B показано, что модулированные сигналы s3(x) зондов 5 и 6 изменяются не только, когда зонды 5 и 6 находятся вблизи друг к другу, но также, когда зонды 5 и 6 находятся вблизи образца. Поэтому, при выявлении близости зондов 5 и 6 на основании того, что сигнал одного зонда превышает порог, необходимо установить большое значение в качестве порога в связи с импульсной помехой.
С другой стороны, использование произведения сигналов s3(x) зондов 5 и 6, как в настоящем варианте осуществления, обеспечивает возможность выявления сигнала видом способа синхронного выявления, который улучшает соотношение S/N (сигнал/шум). Это позволяет установить порог на низкое значение с тем, чтобы повысить чувствительность выявления.
Кроме того, использование произведения сигналов s3(x) зондов 5 и 6 может предотвратить ошибочное определение, что изменение сигнала вследствие импульсной помехи, генерированной в одном зонде, ошибочно принято за изменение вследствие близости зондов 5 и 6. В частности, поскольку изменения сигналов s3(x) синхронизированы, пока зонды 5 и 6 находятся вблизи друг от друга, то использование произведения сигналов s3(x) зондов 5 и 6 способно, насколько возможно, исключить ошибочное определение, когда зонды 5 и 6 находятся на расстоянии друг от друга, позволяя точно определить близость зондов 5 и 6.
На фиг. 26 показано изменение сигналов s3(x) зондов 5 и 6, а также произведение данных сигналов, в то время как область вокруг кончика второго зонда 6 сканировалась первым зондом 5. На фиг. 26 показано, что сигналы зондов 5 и 6 значительно колеблются, когда произведение сигналов s3(x) велико. То есть изменение сигнала напряжения определенной частоты зондов 5 и 6 происходит вследствие близости зондов 5 и 6. На фиг. 26 наблюдается множество пиков. Это, возможно, происходит потому, что сигнал ослаблялся не только, когда кончик первого зонда 5 находился поблизости к кончику второго зонда 6, но также, когда кончик первого зонда 5 находился поблизости к боковой поверхности второго зонда 6.
(3) Способ зондового сканирования
На фиг. 27 показан способ сканирования, используемый в первом варианте осуществления. Как показано на фиг. 27, в первом варианте осуществления, когда зонд типа C (зонд C), используемый для сканирования, выявляется вблизи зонда типа I (зонда I), зонд C принуждается к перемещению на следующую линию. Затем, после выполнения скана в обратном направлении в сторону от зонда I зонд C еще раз сдвигается по направлению к зонду I. Таким образом, выполняется возвратно-поступательное сканирование.
Однако когда зонд C принуждается к перемещению на следующую линию, зонд C и зонд I могут столкнуться друг с другом вследствие данного вынужденного передвижения. Кроме того, когда зонд C и зонд I движутся ближе друг к другу, ослабляется не только сигнал определенной частоты (100 Гц), но также и сигнал резонансной частоты (32 кГц). Следовательно, блок 22 управления ошибочно определяет, что зонд C передвинулся к образцу и передвигает зонд C в направлении в сторону от образца. В результате, при способе возвратно-поступательного сканирования зонд C движется в сторону от образца, когда зонд C выполняет возвратно-поступательное сканирование в области, где зонд C и зонд I находятся ближе всего друг к другу.
На фиг. 28 показано изображение поверхности (топографическое изображение) образца при возвратно-поступательном сканировании. В данном эксперименте использовался образец с приблизительно плоской поверхностью. На фиг. 28 левая часть представляет собой область сканирования зонда C, а пограничная часть интенсивно-черной области в правой части представляет собой область, где зонд C и зонд I находятся ближе всего друг к другу. Как показано на фиг. 28, в области, где зонд C и зонд I находятся ближе всего друг к другу, интенсивности цвета соседних линий сканирования являются разными. Это показывает, что расстояние между зондом C и образцом различается, в зависимости от того, проводится ли сканирование зондом в направлении налево или направо.
Учитывая данный фактор, во втором варианте осуществления использовался однонаправленный способ сканирования, как показано на фиг. 29. На фиг. 30 показано изображение поверхности образца при однонаправленном способе сканирования. Этот способ может избежать столкновения зондов 5 и 6 при выполнении сканирования в области, где зонд C и зонд I находятся ближе всего друг к другу. Сравнение с фиг. 28 показывает, что при однонаправленном способе сканирования различие интенсивности цвета соседних линий небольшое даже в области, где зонды 5 и 6 находятся ближе всего друг к другу, и оттенок не изменяется в пределах линии. Это указывает на то, что зонд C может передвигаться, в то же время поддерживая постоянное расстояние до образца.
Настоящее изобретение не ограничивается указанными выше вариантами осуществления, и возможны разнообразные изменения.
Например, сканирующий зондовый микроскоп может представлять собой любой тип микроскопа, отличного от сканирующего близкопольного оптического микроскопа, такого как сканирующий туннельный микроскоп, атомный силовой микроскоп, магнитный силовой микроскоп или фрикционный силовой микроскоп.
Количество первых и вторых зондов не ограничивается одним. Количество и первых, и вторых зондов может быть больше одного. Или один зонд может использоваться в количестве одного элемента, а количество другого зонда может быть больше одного.
В вариантах осуществления второй зонд передвигался относительно поверхности образца путем передвижения предметного столика. Однако второй зонд может непосредственно передвигаться для сканирования поверхности образца. Такой непосредственно перемещаемый зонд может представлять собой любой из первого и второго зондов или оба зонда.
Может обеспечиваться вибрация определенной частоты или первого зонда, или второго зонда. Альтернативно, может обеспечиваться вибрация определенной частоты обоих зондов.
Определенная частота не ограничивается частотой 100 Гц, она может быть установлена на любое значение.
Во втором варианте осуществления близость первого и второго зондов выявлялась на основании произведения сигналов s3(x) относительно расстояния между первым и вторым зондами. Однако близость зондов может быть выявлена на основании суммы сигналов s3(x).
ОБЪЯСНЕНИЕ ЦИФРОВЫХ ОБОЗНАЧЕНИЙ
1 - Сканирующий близкопольный оптический микроскоп
3 - Предметный столик
5 - Первый зонд
6 - Второй зонд
8 - Механизм перемещения образца
10 - Механизм перемещения зонда
12 - Механизм регулирования расстояния (регулятор расстояния между зондом и образцом)
14 - Источник света
16 - Блок выявления
22 - Блок управления (регулятор, вибратор, детектор близости зондов и устройство контроля вибраций)
25, 27 - Кварцевый резонатор
29, 30 - Генератор вибрации
32, 34 - Синхронный усилитель (устройство контроля вибраций)
Реферат
Сканирующий зондовый микроскоп включает в себя первый и второй зонды для сканирования образца при поддержании расстояния до поверхности образца, кварцевые резонаторы, удерживающие каждый из первого и второго зондов, и модулирующий генератор для обеспечения вибрации определенной частоты первого зонда, которая отличается от резонансной частоты каждого кварцевого резонатора. Блок управления контролирует вибрацию определенной частоты первого и второго зондов, выявляет близость первого зонда и второго зонда друг к другу на основании изменения определенных частот и регулирует привод первого и второго зондов. Технический результат - предотвращение столкновений первого и второго зондов при их перемещении. 4 н. и 11 з.п. ф-лы, 45 ил.
Формула
a) первый сканер для перемещения первого зонда относительно образца;
b) второй сканер для перемещения второго зонда относительно образца;
c) вибратор для обеспечения вибрации с определенной частотой или первого зонда, или второго зонда;
d) устройство контроля вибраций для контролирования вибрации с определенной частотой первого зонда и второго зонда;
e) детектор близости зонда для выявления близости первого зонда и второго зонда друг к другу на основании изменения, по меньшей мере, любой из вибрации первого зонда или вибрации второго зонда; и
f) регулятор для регулирования первого сканера и второго сканера на основании результата выявления детектором близости зонда.
вибратор обеспечивает вибрацию первого зонда; и
детектор близости зонда выявляет близость первого зонда и второго зонда друг к другу на основании того, что величина изменения вибрации первого зонда равна пороговому значению или меньше него.
вибратор обеспечивает вибрацию первого зонда; и
детектор близости зонда выявляет близость первого зонда и второго зонда друг к другу на основании того, что величина изменения вибрации второго зонда превышает пороговое значение.
детектор напряжения для выявления сигнала напряжения, индуцированного в каждом из резонаторов камертонного типа, когда кончик первого зонда и кончик второго зонда отдельно приближаются к поверхности образца; и
регулятор расстояния между зондом и образцом для стабилизации расстояния между кончиком каждого зонда и поверхностью образца на основании результата выявления детектором напряжения.
a) первый резонатор камертонного типа, к которому прикреплен первый зонд;
b) второй резонатор камертонного типа, к которому прикреплен второй зонд;
c) сканер для перемещения каждого из первого зонда и второго зонда относительно образца при резонировании каждого из первого резонатора камертонного типа и второго резонатора камертонного типа;
d) вибратор для обеспечения вибрации с определенной частотой или первого зонда, или второго зонда;
e) детектор сигналов для выявления сигнала напряжения определенной частоты, индуцированного в каждом из резонаторов камертонного типа, когда первый зонд и второй зонд приближаются друг к другу, в то время как вызываются резонансы первого резонатора камертонного типа и второго резонатора камертонного типа; и
f) детектор близости зонда для выявления близости первого зонда и второго зонда друг к другу на основании сигнала напряжения определенной частоты, индуцированного в каждом из первого резонатора камертонного типа и второго резонатора камертонного типа.
детектор близости зонда выявляет близость первого зонда и второго зонда друг к другу на основании произведения сигнала напряжения определенной частоты, индуцированного в первом резонаторе камертонного типа, и сигнала напряжения определенной частоты, индуцированного во втором резонаторе камертонного типа.
детектор близости зонда выявляет близость первого зонда и второго зонда друг к другу на основании суммы сигнала напряжения определенной частоты, индуцированного в первом резонаторе камертонного типа, и сигнала напряжения определенной частоты, индуцированного во втором резонаторе камертонного типа.
определенная частота отличается от резонансной частоты резонатора камертонного типа.
обеспечивают вибрацию определенной частоты или первого зонда, или второго зонда;
контролируют вибрацию определенной частоты первого зонда и второго зонда; и
выявляют близость первого зонда и второго зонда друг к другу на основании изменения, по меньшей мере, или вибрации определенной частоты первого зонда, или вибрации определенной частоты второго зонда.
обеспечивают вибрацию определенной частоты первого зонда; и
выявляют близость первого зонда и второго зонда друг к другу на основании того, что величина изменения вибрации первого зонда равна или меньше порогового значения.
обеспечивают вибрацию определенной частоты первого зонда; и
выявляют близость первого зонда и второго зонда друг к другу на основании того, что величина изменения вибрации второго зонда превышает пороговое значение.
первый зонд прикреплен к первому резонатору камертонного типа;
второй зонд прикреплен ко второму резонатору камертонного типа;
обеспечивают вибрацию определенной частоты или первого зонда, или второго зонда; и
выявляют близость первого зонда и второго зонда друг к другу на основании сигнала напряжения определенной частоты, индуцированного в каждом из первого резонатора камертонного типа и второго резонатора камертонного типа.
выявляют близость первого зонда и второго зонда друг к другу на основании произведения сигнала напряжения определенной частоты, индуцированного в первом резонаторе камертонного типа, и сигнала напряжения определенной частоты, индуцированного во втором резонаторе камертонного типа.
выявляют близость первого зонда и второго зонда друг к другу на основании суммы сигнала напряжения определенной частоты, индуцированного в первом резонаторе камертонного типа, и сигнала напряжения определенной частоты, индуцированного во втором резонаторе камертонного типа.
детектор напряжения для выявления сигнала напряжения, индуцированного в каждом из резонаторов камертонного типа, когда кончик первого зонда и кончик второго зонда отдельно приближаются к поверхности образца; и
регулятор расстояния между зондом и образцом для стабилизации расстояния между кончиком каждого зонда и поверхностью образца на основании результата выявления детектором напряжения.
Комментарии