Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта - RU2282257C1
Код документа: RU2282257C1
Чертежи









Описание
Изобретение относится к измерительной технике, а именно к устройствам измерения с помощью сканирующего зондового микроскопа (СЗМ) рельефа, линейных размеров и физических характеристик поверхности объектов в режимах сканирующего туннельного микроскопа (СТМ), атомно-силового микроскопа (АСМ) и близкопольного оптического микроскопа (БОМ). Кроме этого, в предложенном устройстве предусмотрена возможность модификации поверхности объекта.
Известен СЗМ с возможностью модификации поверхности объекта, в котором один или несколько зондов приспособлены для механической модификации поверхности объекта и удаления образующихся при этом частиц модифицируемого материала. Исследование поверхности материала и результатов модификации осуществляется методами СЗМ с использованием тех же или других зондов [1].
Недостатки указанного устройства заключаются в том, что механическая модификация поверхности объекта с помощью зонда приводит к ухудшению качества обработки исследуемой поверхности. Также предложенный метод модификации поверхности не применим к мягким полимерным или биологическим объектам, что ограничивает функциональные возможности устройства.
Известен также сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта, содержащий криогенную камеру, первый механизм перемещения держателя объекта по криволинейной траектории со смещением на толщину механической модификации объекта, первую платформу с пуансоном, сопряженную со вторым механизмом перемещения вдоль оси Z, перпендикулярной поверхности объекта (X, Y), а также сканирующее устройство по трем координатам (X, Y, Z) с держателем зонда, сопряженное с устройством предварительного сближения держателя зонда и держателя объекта [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Основной недостаток известного устройства заключается в том, что в процессе измерения могут быть взаимные нефункциональные перемещения держателя зонда и держателя объекта, связанные с вибрациями внешних устройств, передаваемыми в зону измерения, а также с температурными дрейфами элементов конструкции. Это приводит к снижению разрешения указанного прибора.
Технический результат настоящего изобретения заключается в повышении разрешения прибора.
Это достигается тем, что в сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта, содержащий криогенную камеру, первый механизм перемещения держателя объекта по криволинейной траектории со смещением на толщину механической модификации объекта, первую платформу с пуансоном, сопряженную со вторым механизмом перемещения вдоль оси Z, перпендикулярной поверхности объекта (X, Y), а также сканирующее устройство по трем координатам (X, Y, Z) с держателем зонда, сопряженное с устройством предварительного сближения держателя зонда и держателя объекта, введен базовый элемент, сопряженный с первой платформой и первым механизмом, сканирующее устройство по трем координатам установлено на устройстве предварительного сближения посредством переходника, устройство предварительного сближения закреплено на первой платформе, держатель зонда, сканирующее устройство по трем координатам, переходник, базовый элемент и первый механизм снабжены соответственно первым, вторым, третьим, четвертым и пятым термокомпенсаторами, а между держателем зонда и держателем объекта установлен соединительный элемент.
Существуют варианты, в которых первый термокомпенсатор представляет собой клеевой шов и держатель зонда, при этом в местах соединения со сканирующим устройством имеет упругие элементы; второй термокомпенсатор выполнен в виде двух пьезоэлементов одинаковой длины и с одинаковыми коэффициентами линейного расширения, первый из которых закреплен первым концом на переходнике, а второй - соединен с первым концом второго элемента, при этом второй конец второго элемента расположен на максимально близком расстоянии от первого конца первого элемента; третий термокомпенсатор представляет собой клеевой шов, а переходник содержит кольцо с коэффициентом линейного расширения, превышающим этот коэффициент клеевого шва; четвертый термокомпенсатор выполнен в виде второго плеча, имеющего коэффициент линейного расширения, равный коэффициенту линейного расширения последовательности элементов: первое плечо, первая платформа, устройство предварительного сближения и переходник; пятый термокомпенсатор выполнен в виде сменных элементов с различными коэффициентами линейного расширения, закрепленными в первом механизме.
Возможны варианты, в которых соединительный элемент закреплен на первом плече базового элемента с возможностью взаимодействия с держателем объекта и его координатной фиксации, а также вариант, в котором соединительный элемент закреплен на держателе объекта с возможностью взаимодействия с переходником.
Существуют также варианты, в которых устройство предварительного сближения держателя зонда с держателем объекта выполнено в виде инерционного шагового пьезодвигателя, а также устройство предварительного сближения держателя зонда с держателем объекта выполнено в виде второй платформы с направляющими, установленной на опорах, закрепленных на первой платформе, и сопряженной с возможностью кинематического размыкания с инерционным шаговым пьезодвигателем, закрепленным на первой платформе, или вариант, в котором устройство предварительного сближения держателя зонда с держателем объекта выполнено в виде второй платформы с направляющими, установленной на трех пьезотрубках, имеющих возможность изгиба.
Возможны также варианты, в которых криогенная камера соединена с устройством продува инертным газом, снабжена контейнером промежуточного хранения, расположенным внутри нее, а зона измерения сопряжена с первым концом световода, при этом второй его конец состыкован с источником излучения.
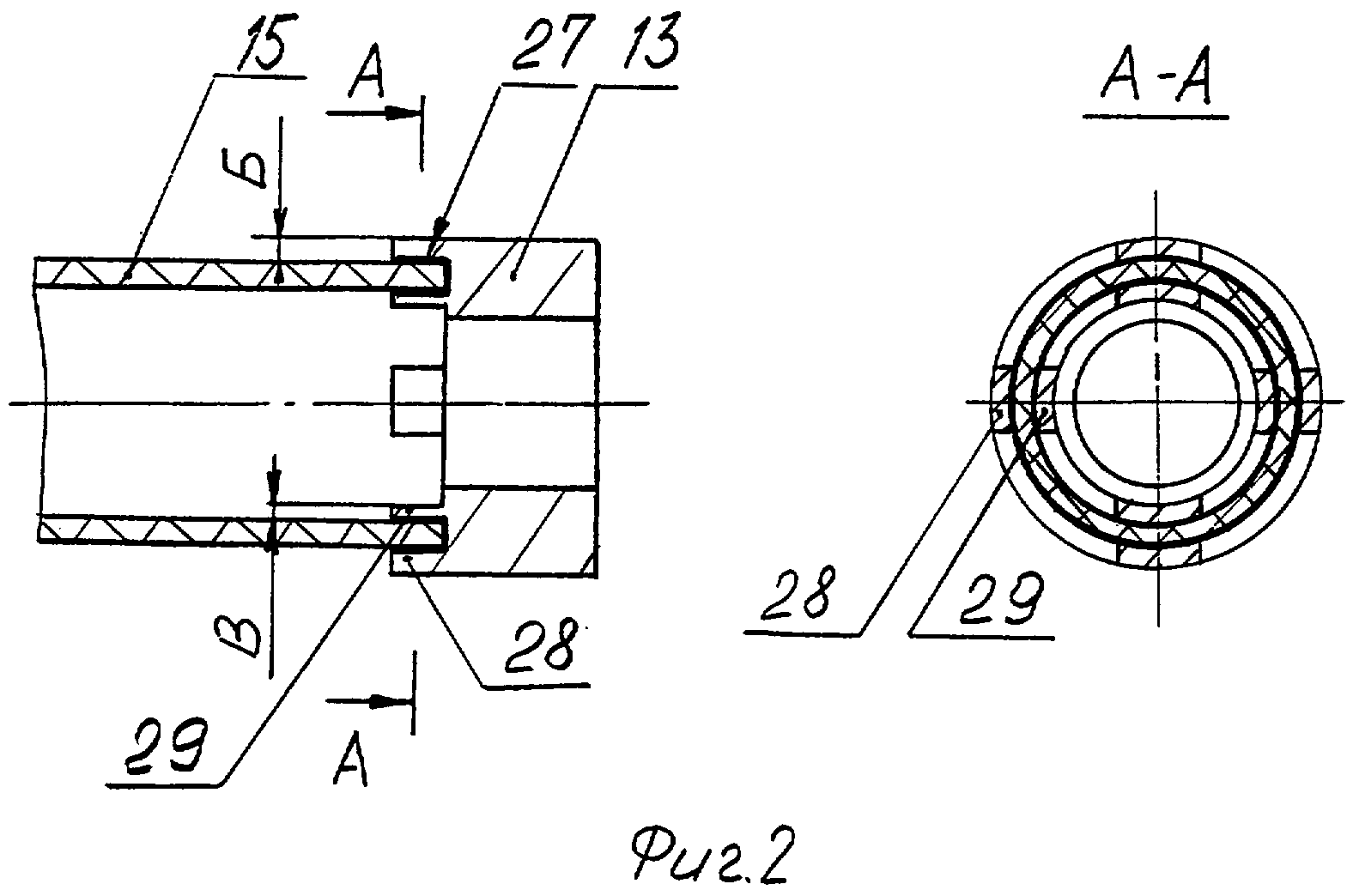
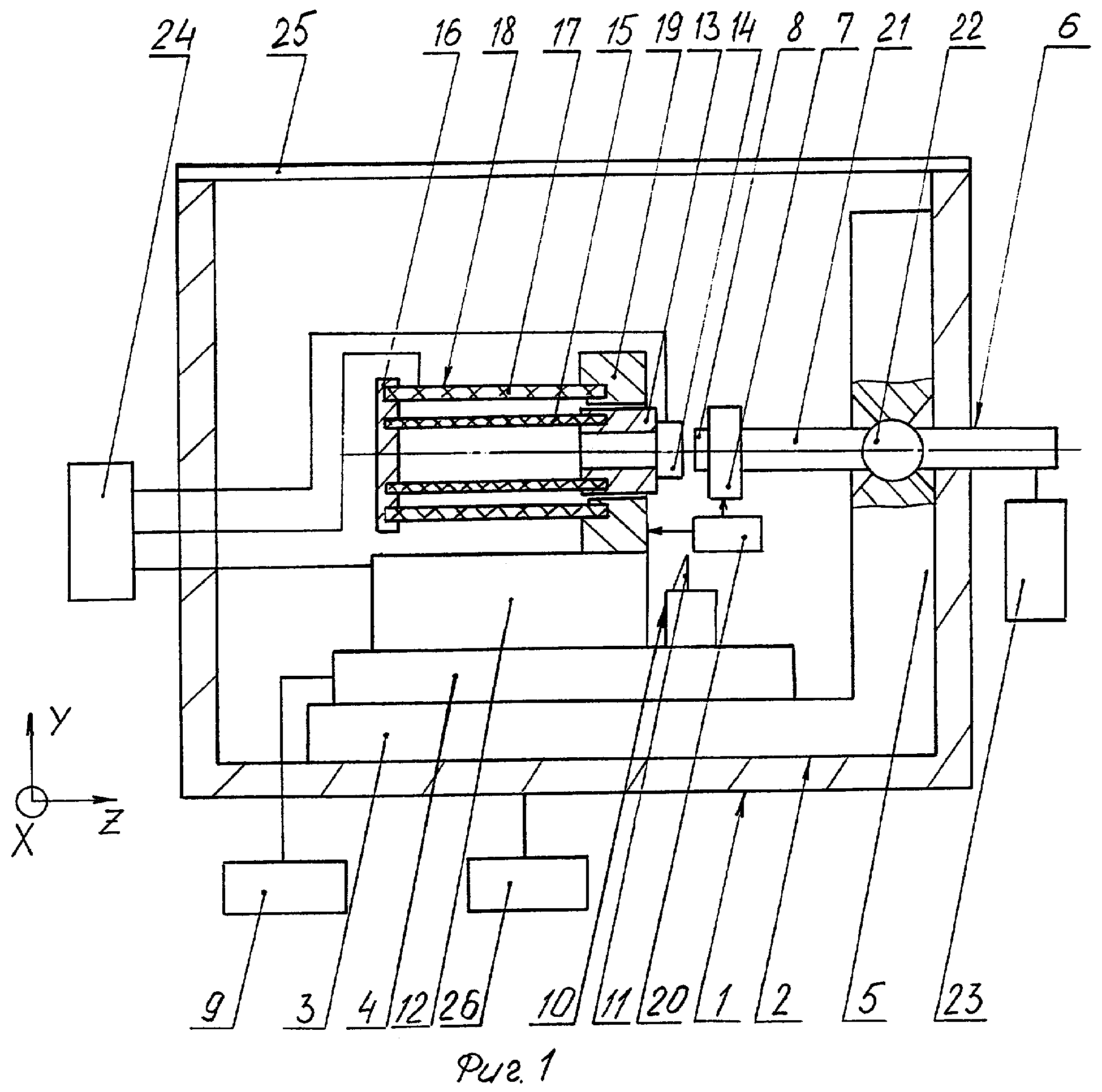
Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта, содержит криогенную камеру 1 с базовым элементом 2, на первом плече 3 которого установлена первая платформа 4, а на втором плече 5 - первый механизм 6 перемещения первого держателя 7 объекта 8 по криволинейной траектории со смещением на толщину механической модификации объекта 8. Первая платформа 4 сопряжена со вторым механизмом 9 перемещения ее вдоль оси Z, перпендикулярной измеряемой поверхности объекта 8 (X, Y), а также по координате X. На платформе 4 посредством захвата 10 закреплен пуансон 11, в качестве которого наиболее часто используют нож. (Подробнее элементы криокамеры описаны в [3]). Также на платформе 4 установлено устройство предварительного сближения 12 второго держателя 13 зонда 14 с первым держателем 7 объекта 8. Держатель 13 может быть закреплен на пьезотрубке 15, имеющей перемещения по координатам X, Y, которая, в свою очередь, соединена посредством фланца 16 с пьезотрубкой 17, выполняющей перемещения по координате Z. Элементы 15, 16 и 17 представляют собой сканирующее устройство 18 по трем координатам X, Y, Z, которое закреплено на переходнике 19. Более подробно сканирующие устройства описаны в [4, 5, 6, 7]. Внутри цепочки элементов между держателем 7 объекта 8 и держателем 13 зонда 14 установлен соединительный элемент 20. В предложенной конструкции держатель 13, сканирующее устройство 18, переходник 19, базовый элемент 2 и первый механизм 6 снабжены соответственно первым, вторым, третьим, четвертым и пятым термокомпенсаторами.
Первый механизм 6 может содержать балку 21, поворотное устройство 22 и привод 23. Первая платформа 4 может включать направляющие (не показаны) для перемещения относительно базового элемента 2 [3]. Сканирующее устройство 18, держатель зонда 13 и устройство предварительного сближения 12 могут быть подключены к блоку управления 24. (См. подробно [6, 7, 8]). Криокамера 1 может иметь съемную крышку 25 и быть подключенной к устройству поддержания температуры 26 [3].
Первый термокомпенсатор (фиг.2) может содержать клеевой шов 27 между держателем 13 и пьезотрубкой 15. При этом держатель 13 может иметь упругие элементы, выполненные, например, в виде лепестков 28 и 29 с толщинами Б и В порядка 0,1-0,2 мм либо в виде стенок держателя 13 (фиг.3), 30 и 31 с толщинами Д и Е порядка 0,05-0,1 мм.
Следует заметить, что в качестве зонда 14 может быть использована игла туннельного микроскопа, кантилевер силового микроскопа, а также кварцевый резонатор с иглой или световодом. В каждом конкретном случае конструкция держателя 13 будет различна, она может включать пружинные лапки, магнитные захваты и т.п. Подробно держатели с зондами см. в [9, 10, 11].
Сущность второго термокомпенсатора заключается в применении пьезотрубок 15 и 17 одинаковой длины с одинаковыми коэффициентами линейного расширения.
Третий термокомпенсатор может быть выполнен в виде клеевого шва 32 (фиг.4), а также кольца 33, расположенного внутри переходника 19 и имеющего коэффициент линейного расширения, превышающий этот коэффициент клеевого шва 32.
Следует заметить, что в качестве клея целесообразно использовать эпоксидную смолу типа "UHU plus endfest 300" с регулируемой упругостью затвердевшего состава. В этом случае возможно использование пьезотрубок и элементов 13 и 19 с разными коэффициентами линейного расширения. В случае изготовления элементов 13 и 19, например, из титана, имеющего коэффициент линейного расширения, близкий к пьезокерамике, основную роль в термокомпенсации играют элементы 28, 29, 30 и 33. Про размеры элементов 28, 29 и 30 было сказано выше. Что касается использования элемента 33, то толщина И стенки элемента 19 при этом должна быть минимально возможной (порядка 0,05 мм), чтобы сжимающееся кольцо 33 при понижении температуры уменьшало вероятность отрыва клеевого шва 32 от поверхности 34. (Клеи обычно имеют коэффициенты линейного расширения, превышающие эти коэффициенты металлов и пьезокерамики).
Сущность четвертого термокомпенсатора по координате Y заключается в том, что второе плечо 5 (фиг.1) базового элемента 2 выполняют из материала, имеющего коэффициент линейного расширения, равный приведенному коэффициенту линейного расширения последовательности элементов: первое плечо 3, первая платформа 4, устройство 12, переходник 14.
Это можно выполнить, измеряя температурные изменения длины перечисленных элементов по координате Y, и в соответствии с этим подбором материала плеча 5. Расширением элементов 6, 13, 18 по координате Y, вследствие их осесимметричности по координате Z можно пренебречь из-за незначительного вклада.
Пятый термокомпенсатор по координате Z может быть выполнен в виде сменных элементов 35 из различных материалов (фиг.5), закрепленных, например, между балкой 21 и держателем 7. Определение материала элемента 35 может осуществляться как путем расчета, так и по аналогии с четвертым термокомпенсатором. Соответственно, чем больше в каждом конкретном случае коэффициенты линейного расширения объекта 8, держателя 7 и балки 21, тем меньше должен быть этот коэффициент у элемента 35 и наоборот.
Соединительный элемент 20 может быть выполнен в двух вариантах. В первом (фиг.6) - рамку 36 закрепляют на первом плече 3 базового элемента 2. При этом ее выполняют с возможностью координатной фиксации держателя 7 благодаря первому неподвижному упору 37, подвижному упору 38, закрепленному на плоской пружине 39, магниту 40 с винтом 41 и второму неподвижному упору 42. Упор 37 может быть выполнен из бронзы, упор 38 - из фторопласта, а держатель 7 - из магнитной стали. В случае его изготовления из немагнитного материала в нем должна быть закреплена магнитная вставка (не показана).
Второй вариант соединительного элемента (фиг.7) может содержать упор 43, закрепленный на держателе 7 и расположенный с возможностью взаимодействия с переходником 19, имеющим заходную фаску 44. Следует заметить, что длина упора 43 должна быть такой, чтобы при максимальном отводе зонда 14 от объекта 8, зонд 14 не мешал перемещению первого механизма 6. В качестве устройства предварительного сближения 12 (фиг.8) может быть использован инерционный шаговый пьезодвигатель [12, 13], неподвижной частью 45 закрепленный на платформе 4, а подвижной 46 - на переходнике 19. Возможен также вариант, в котором устройство предварительного сближения (фиг.9) выполнено в виде второй платформы 47 со сканирующим устройством 18 и с направляющими 48, установленной на трех опорах 49 (третья опора не показана, т.к. расположена за одной из опор по координате X), закрепленных на первой платформе 4. При этом вторая платформа 47 сопряжена с возможностью кинематического размыкания с подвижной частью 46 посредством кронштейна 50 с пружиной 51 и зацепа 52, неподвижная часть 45 пьезодвигателя при этом закреплена на первой платформе 4.
Кроме этого возможен вариант, в котором устройство предварительного сближения 12 выполнено в виде второй платформы 47 (фиг.10) с направляющими 48, установленной на трех пьезотрубках 53 с шаровыми опорами 54 (третья пьезотрубка не показана, т.к. расположена за одной из пьезотрубок по координате X).
Следует заметить, что пьезотрубки 53 могут изгибаться, как по координате Z, так и по координатам Z, X. В первом случае направляющие могут быть V-образными в сочетании с плоскими, а во втором - только плоскими. Пример использования таких направляющих описан в [14].
Одним из вариантов предложенного решения является снабжение его устройством продувки инертным газом 55 (фиг.11), содержащим устройство напуска 56, вентиль 57 и сопло 58, сопряженное с зоной измерения 59. Крышка 25 при этом может быть установлена на корпусе камеры 1 негерметично. Здесь же может быть установлен световод 62, первым концом 63 сопряженный с зоной измерения 59, а вторым 64 - посредством зеркала 65 с источником излучения (лазером) 66. Зона измерения 59 может быть также сопряжена с микроскопом 67. В этом случае крышка 25 должна быть оптически прозрачной. В криогенной камере может быть установлен контейнер промежуточного хранения 68, выполненный из полого, открытого снизу и съемного кожуха. Подъем контейнера 68 над дном камеры 1 может быть осуществлен вручную с использованием пинцета.
Устройство работает следующим образом. Зонд 14 (фиг.1) закрепляют на втором держателе 13, а объект 8 - на первом держателе 7. Закрепляют нож 11 в захвате 10. В том случае, если пьезосканер 18 с зондом 14 мешают закреплению ножа 11, то временно снимают платформу 47 с опор 49 (фиг.9) либо, например, переходник 19 (фиг.8) с подвижной части 46. Возможен также съем целиком узла, состоящего из шагового двигателя 12, переходника 19 и пьезосканера 18. Съем по фиг.8 более трудоемок, так как требует отворачивания винтов (не показаны), соединяющих элементы 4 и 12, а также 46 и 18. После установки пьезосканера 18 на место закрывают крышку 25, включают систему напуска азота и формируют требуемую температуру. Подробнее см. [3]. Далее снимают крышку 25 и закрепляют замороженный объект 8 в держателе 7. Следует заметить, что в некоторых случаях с целью недопущения повреждения ножа 11 установка объекта 8 может происходить при снятых ноже 11 и, например, пьезосканере 18 (см. выше). Снятые элементы при этом можно размещать под кожухом 68 (фиг.11). Далее повторно формируют требуемую температуру в камере 1. После этого приводят в действие первый механизм 6 и производят срез или иную механическую модификацию, например, скол поверхности объекта 8. Далее с помощью первого механизма 6 объект 8 возвращают по криволинейной траектории в исходное положение со смещением на толщину следующего среза или толщину механической модификации в сторону зонда 14. Используя второй механизм 9, возможно предварительное наведение зонда 14 на измеряемую область объекта 8 (Подробнее см. в [3]). Зонд 14 подводят к поверхности объекта 8 с помощью устройства предварительного сближения 12. Затем выполняют сканирование участка поверхности объекта 8 в выбранном режиме сканирующей зондовой микроскопии. После завершения сканирования зонд 14 отводят от поверхности объекта 8 с помощью сканирующего устройства 18 или устройства предварительного сближения 12, и процесс механической модификации может быть повторен. При необходимости второй механизм 9 можно использовать для оперативного отвода зонда 14 от объекта 8. Следует заметить, что возможны варианты изменения последовательности описанных действий. Например, возможна установка объекта 8 в держатель 7 при комнатной температуре с последующим охлаждением. Возможна, также, установка зонда 14 в держатель 13 после установки объекта 8 в держатель 7. В качестве держателя объектов часто используют цанговые зажимы. В том случае, если измеряемые объекты имеют небольшие размеры (4 мм), то в держатель 7 устанавливают носитель (не показан) с объектом, который (носитель) может закрепляться одним винтом с доступом к нему при снятой крышке 25. Носители и держатели объектов являются элементами криомикротомов [3].
Специфика работы соединительного элемента, изображенного на фиг.6, заключается в том, что после среза держатель 7 поднимают в положение измерения и фиксируют между упорами 37, 38 и 42 дополнительно с помощью магнита 40. Следует заметить, что для исключения заклинивания механизма 6 упор 37 должен быть точно выставлен по координате X. Для этого возможна подвижка рамки 36 относительно платформы 3 с последующим закреплением. Это может быть сделано с помощью крепежных винтов (не показаны). Упор 42 может иметь юстировочную подвижку по координате Y с последующим закреплением (не показано). Для облегчения вывода держателя 7 из верхнего положения возможен отвод магнита 40 винтом 41 от держателя 7 по координате Y. Отличительной особенностью работы второго варианта соединительного элемента (фиг.7) является то, что в момент сближения зонда 14 с образцом 8 возможно некоторое ослабление давления упора 43 на переходник 19. Это будет облегчать режим сближения и может быть осуществлено путем регулировочной подвижки механизма 6. Величина отвода держателя 14 от держателя 7 не должна препятствовать перемещению упора 43 по координате Y.
Специфика работы шагового двигателя (фиг.8) описана в литературе [12, 13]. Однако следует учитывать допустимое усилие после подвода зонда 14 к образцу 8, которое будет передаваться подвижной части 46 от упора 43. Оно не должно смещать элемент 46 относительно номинального положения. При использовании второго варианта устройства предварительного сближения (фиг.9) можно использовать тот же шаговый двигатель, что и на фиг.8. В этом случае усилие от элемента 46 посредством зацепа 52 передается на кронштейн 50 и соответственно на платформу 47, которая, перемещаясь по опорам 49, осуществляет сближение зонда 14 с объектом 8. Пружина 51 не позволяет перемещаться платформе 47 по направлению к объекту 8 больше, чем на один шаг, в момент возникновения импульса силы от шагового пьезодвигателя. Вместе с этим пружина 51 позволяет при необходимости осуществлять оперативный съем платформы 47 с опор 49.
В варианте, изображенном на фиг.9, при использовании плоских направляющих 48, съем платформы 47 может осуществляться вбок по координате X. Возможен вариант установки захвата 52 и кронштейна 50 между платформами 4 и 47 (не показано). В этом случае съем платформы 47 может быть вверх по координате Y. Следует иметь в виду, что точка приложения силы Р со стороны упора 43 должна быть расположена между опорами 49.
Вариант работы шагового пьезодвигателя на трех пьезотрубках 53 фиг.10 описан в [13].
Компоновка криогенной камеры, представленная на фиг.11, позволяет перед созданием рабочей температуры продувать камеру 1, используя устройство 55, например, сухим азотом, что будет уменьшать намерзание влаги на элементах конструкции. Сопряжение зоны измерения 59 световодом 62 с источником излучения 66 позволяет воздействовать на зонд и образец, например, с целью дополнительного обезвоживания. Снабжение криогенной камеры 1 контейнером промежуточного хранения 68 позволяет временно без размораживания камеры размещать в нем сканирующее устройство с целью дополнительных манипуляций в зоне измерения с устройством 12, соплом 38 и световодом 62.
Введение в предложенное устройство базового элемента и соединительного элемента уменьшает нефункциональные перемещения зонда относительно объекта в процессе измерения и повышает разрешение.
Снабжение устройства термокомпенсаторами уменьшает термодрейфы зонда относительно объекта и повышает разрешение прибора.
Выполнение первого термокомпенсатора в виде клеевого шва и упругих элементов держателя зонда повышает надежность устройства, а также уменьшает механические дрейфы держателя зонда.
Выполнение двух пьезоэлементов с одинаковой длиной уменьшает осевой (Z) термодрейф держателя зонда. Введение в переходник кольца с коэффициентом линейного расширения, превышающим этот коэффициент клеевого шва, повышает надежность устройства.
Выполнение четвертого термокомпенсатора в виде второго плеча Г-образного базового элемента, имеющего коэффициент линейного расширения, равный коэффициенту линейного расширения последовательности элементов: первое плечо, первая платформа, устройство предварительного сближения и переходник, уменьшает термодрейф объекта относительно зонда.
Выполнение пятого термокомпенсатора в виде сменных элементов с различными коэффициентами линейного расширения, закрепленным в первом механизме, уменьшает термодрейф объекта относительно зонда.
Закрепление соединительного элемента на первом плече базового элемента с возможностью взаимодействия с держателем объекта и его координатной фиксацией сохраняет положение зоны измерения на поверхности объекта после каждой ее модификации.
Закрепление соединительного элемента на держателе объекта с возможностью взаимодействия с переходником уменьшает механическую петлю при измерении и нефункциональные перемещения зонда относительно объекта.
Выполнение устройства предварительного сближения в виде инерционного шагового пьезодвигателя, сопряженного с возможностью кинематического размыкания с первой платформой, установленной на опорах, обеспечивает гарантированный подвод зонда к объекту при высоких жесткостных характеристиках системы.
Все перечисленные признаки повышают разрешение прибора.
ЛИТЕРАТУРА
1. Патент US 6337479, 2002.
2. Патент RU 2233490, 2003.
3. Проспект фирмы "Leica". ЕМ FCS, Leica microsisteme Gmbh, www.leica-microsistems.com.
4. Scanning tunneling microscope instrumentation. Y. Kyk, P. Sulverman. Rev. Sci. Insturm. 60 (1989), N2, 165-180.
5. Патент RU 2199171, 2003.
6. Зондовая микроскопия для биологии и медицины. В.А. Быков и др., Сенсорные системы, т.12, №1, 1998, с.99-121.
7. Сканирующая туннельная и атомно-силовая микроскопия в электрохимии поверхности. А.И. Данилов, Успехи химии 64 (8), 1995, с.818-833.
8. Системные аналогово-цифровые преобразователи и процессоры сигналов, М.М. Гельман, Москва, "Мир", 1999.
9. Патент US 5767514, 1998.
10. Патент US 5376790, 1994.
11. Патент RU 2221287, 2004.
12. Патент ЕР 0823738, 1998.
13. Патент RU 2152103, 2003.
14. Патент RU 2159454, 2000.
Реферат
Изобретение относится к измерительной технике, а именно к устройствам измерения с помощью сканирующего зондового микроскопа рельефа, линейных размеров и физических характеристик поверхности объектов в режимах сканирующего туннельного микроскопа, атомно-силового микроскопа и близкопольного оптического микроскопа. Сканирующий зондовый микроскоп, совмещенный с устройством механической модификации поверхности объекта, содержит криогенную камеру, первый механизм перемещения держателя объекта, первую платформу с пуансоном, сканирующее устройство по трем координатам с держателем зонда, сопряженное с устройством предварительного сближения держателя зонда и держателя объекта, базовый элемент. Сканирующее устройство установлено на устройстве предварительного сближения посредством переходника. Устройство предварительного сближения закреплено на первой платформе. Держатель зонда, сканирующее устройство по трем координатам, переходник, базовый элемент и первый механизм снабжены соответственно первым, вторым, третьим, четвертым и пятым термокомпенсаторами. Между держателем зонда и держателем объекта установлен соединительный элемент. Технический результат - повышение разрешающей способности прибора. 13 з.п ф-лы, 11 ил.
Комментарии