Измерение/отображение/запись/воспроизведение данных волнового фронта для использования в процедурах коррекции зрения - RU2604942C2
Код документа: RU2604942C2
Чертежи














Описание
Родственные заявки
По данной заявке испрашивается приоритет патентной заявки США, регистрационный номер 13/034648, под названием «Измерение/отображение/запись/воспроизведение в реальном времени данных волнового фронта для использования в процедурах коррекции зрения» («Real-Time Measurement/Display/Record/Playback Of Wavefront Data For Use In Vision Correction Procedures»), от 24 февраля 2011 года. Полное содержание патентной заявки США с регистрационным номером 13/034648 включено в настоящий документ ссылкой во всей своей полноте.
Данная заявка является частичным продолжением заявки с регистрационным номером 12/790301 под названием «Адаптивный последовательный датчик волнового фронта с программным управлением» («Adaptive Sequential Wavefront Sensor With Programmed Control»), опубликованной 28 мая 2010 года, являющейся частичным продолжением заявки номер 12/643945 под названием «Предложенное пользователем поле (поля) ввода для адаптированного анализа/представления данных» («User-Proposed Entry Field(s) For Customized Data Analysis/Presentation»), от 21 декабря 2009 года, являющейся частичным продолжением заявки с регистрационным номером 12/605219 под названием «Оптимизация процедур коррекции зрения» («Optimizing Vision Correction Procedures»), опубликованной 23 октября 2009 года, которая является продолжением заявки с регистрационным номером 11/761890 под названием «Адаптивный последовательный датчик волнового фронта» («Adaptive Sequential Wavefront Sensor»), от 12 июня 2007 года (в настоящее время патент США 7815310, опубликован 19 октября 2010 года), являющейся продолжением заявки номер 11/335980 под названием «Последовательный датчик волнового фронта» («Sequential Wavefront Sensor»), от 20 января 2006 года (в настоящее время патент США 7445335, опубликован 4 ноября 2008 года), все они включены в настоящий документ посредством ссылки во всей своей полноте.
Область техники
Один или более вариантов осуществления настоящего изобретения относятся в целом к офтальмологическим датчикам волнового фронта, системам адаптивной оптики и к обработке и представлению данных. В частности, изобретение относится к процедурам коррекции зрения направленным волновым фронтом, устройству/системе и способу измерения/отображения/записи/воспроизведения в реальном времени данных о волновом фронте, синхронизированных с «видеофильмом», для обеспечения в реальном времени обратной связи с процедурой коррекции зрения и пользовательским интерфейсом устройства, что позволяет каждому пользователю адаптировать операции с данными, собранными или записанными устройством.
Предпосылки изобретения
Датчик волнового фронта представляет собой устройство для измерения аберраций оптического волнового фронта. Датчики волнового фронта используются для измерения аберраций глаза посредством направления узкого пучка света на сетчатку глаза и восприятия оптического волнового фронта, выходящего из глаза. В случае расслабленного эмметропического глаза или расслабленного глаза с полностью скорректированными аберрациями оптический волновой фронт, выходящий из глаза, является плоским. Напротив, если глаз имеет оптические аберрации, волновой фронт, выходящий из расслабленного глаза, не будет плоским.
Традиционные процедуры диагностики зрения, коррекции зрения и рефракционной хирургии, в том числе авторефракция, стандартное измерение волнового фронта глаза, тесты на фороптере, ЛАСИК (лазерный кератомилез in situ), ЛТК (лазерная термокератопластика), СБК (суббоуменовый кератомилез), ИнтраЛАСИК (интрастромальная кератопластика), ФРК (фоторефрактивная кератэктомия), ЛАСЭК (лазерная эпителиокератэктомия), имплантация ИОЛ (интраокулярные линзы, включая мультифокальные, аккомодационные и торические ИОЛ), имплантация/позиционирование роговичных накладок/вкладок, РК (радиальная кератотомия), LRI (Limbal Relaxing Incision, лимбальные послабляющие разрезы), CRI (Corneal Relaxing Incision, роговичные послабляющие разрезы) и ДК (дугообразная кератотомия), обычно проводятся без какого-либо отображения результата непрерывного измерения волнового фронта в реальном времени, чтобы клинический специалист-практик мог в реальном времени видеть результат коррекции (см., например, US 6271914, US 6271915, US 6460997, US 6497483 и US 6499843). Хотя датчики волнового фронта используются для измерения аномалий рефракции и аберраций глаза высших порядков до, во время и после динамического процесса коррекции зрения, эти устройства обычно выдают при измерении только статическое изображение карты волнового фронта, из-за этого потенциально пропуская информацию, необходимую специалисту-практику для оптимизации результатов оптических измерений.
Обычно конечному пользователю предоставляются измерительные устройства со встроенным управлением сбором, обработкой и представлением или отображением данных. Поэтому конечные пользователи не могут свободно управлять данными по своему выбору. В некоторых приложениях, таких как офтальмология, иногда необходимо предоставить конечному пользователю свободу в выборе предпочтительной формы, формата, передаточной функции, приложения, выражения, вывода и/или алгоритма для обработки данных.
Сущность изобретения
Один примерный вариант осуществления изобретения представляет собой устройство/систему для обеспечения обратной связи с процедурой коррекции зрения, содержащее/ую датчик волнового фронта, передающий информацию в реальном времени, для измерения характеристик волнового фронта от биологического глаза; видеокамеру реального времени для получения цифровых изображений и/или записи видеоизображений глаза; компьютер с цифровым видеозаписывающим устройством, позволяющий синхронизированную обработку данных, отображение в реальном времени, запись и воспроизведение как записанных данных/результатов волнового фронта, так и записанного видеоизображения глаза; и дисплей, соединенный с компьютером, для одновременного отображения на одном и том же экране обработанного результата измерений волнового фронта и видеоизображения глаза.
Другой примерный вариант осуществления представляет собой способ обеспечения обратной связи с процедурой коррекции зрения, содержащий этапы измерения оптического волнового фронта от глаза датчиком волнового фронта реального времени; захвата и/или записи видеоизображений глаза видеокамерой в реальном времени; обработки данных волнового фронта и видео с помощью компьютера с цифровым видеозаписывающим устройством, позволяющего синхронизированное отображение и/или запись и/или воспроизведение как информации о волновом фронте, так и видеоизображения глаза; и одновременного отображения на одном и том же экране или более чем на одном (отдельном) экране (к примеру, на дисплее поднятой головы HUD (heads up display) на одном или на каждом окуляре) обработанного результата волнового фронта и видеоизображения.
В одном примерном варианте осуществления данные волнового фронта захватываются (записываются) покадрово в реальном времени синхронно с видеоизображением глаза в реальном времени и отображаются на одном и том же или нескольких мониторах.
В другой примерный вариант осуществления включены такие возможности цифрового видеозаписывающего устройства, как просмотр (перемотка и воспроизведение) параметров измерения волнового фронта в виде фильма, синхронизированного с видеоизображением глаза, во время и/или после процедуры коррекции зрения.
Примерные варианты осуществления включают в себя способы и системы, допускающие адаптацию конечным пользователем способа обработки данных, полученных от измерительного устройства.
Еще одним объектом настоящего изобретения является сопровождение и оптимизация хирургических процедур коррекции зрения, основанных на удалении вещества роговицы, с использованием обратной связи в реальном времени с компенсацией, среди которых ЛАСИК, СБК, ЛТК, ИнтраЛАСИК, ФлексиЛАСИК, ФРК, ЛАСЭК, РК, LRI, CRI и ДК.
Эти и другие признаки и преимущества настоящего изобретения станут очевидны специалистам в данной области техники после рассмотрения последующего подробного описания вариантов осуществления вместе с прилагаемыми чертежами.
Краткое описание чертежей
Фигура 1 показывает плоский волновой фронт, выходящий из эмметропического глаза, находящегося в расслабленном состоянии.
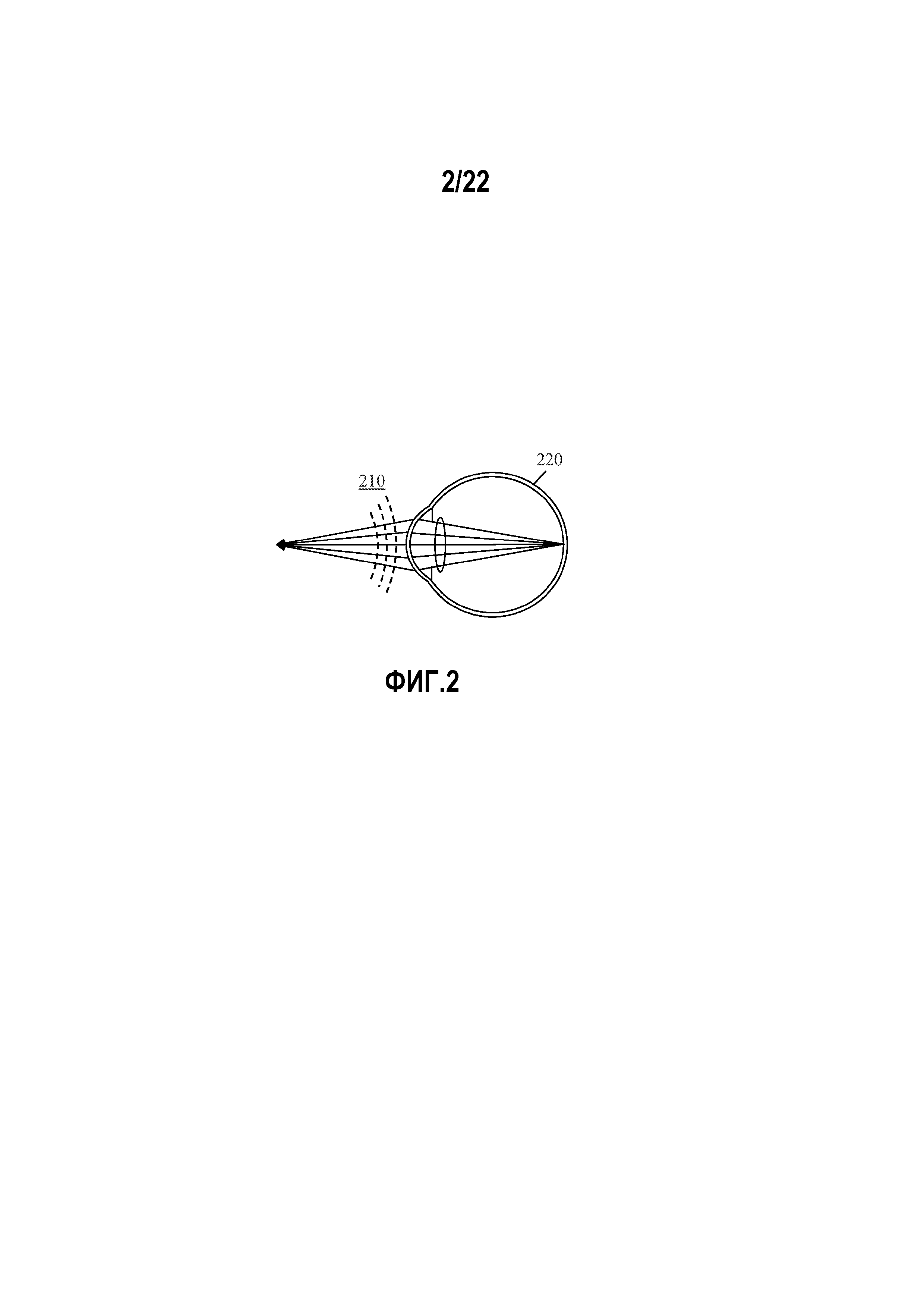
Фигура 2 показывает сходящийся сферический волновой фронт, выходящий из миопического, или близорукого, глаза.
Фигура 3 показывает расходящийся сферический волновой фронт, выходящий из гиперопического, или дальнозоркого, глаза.
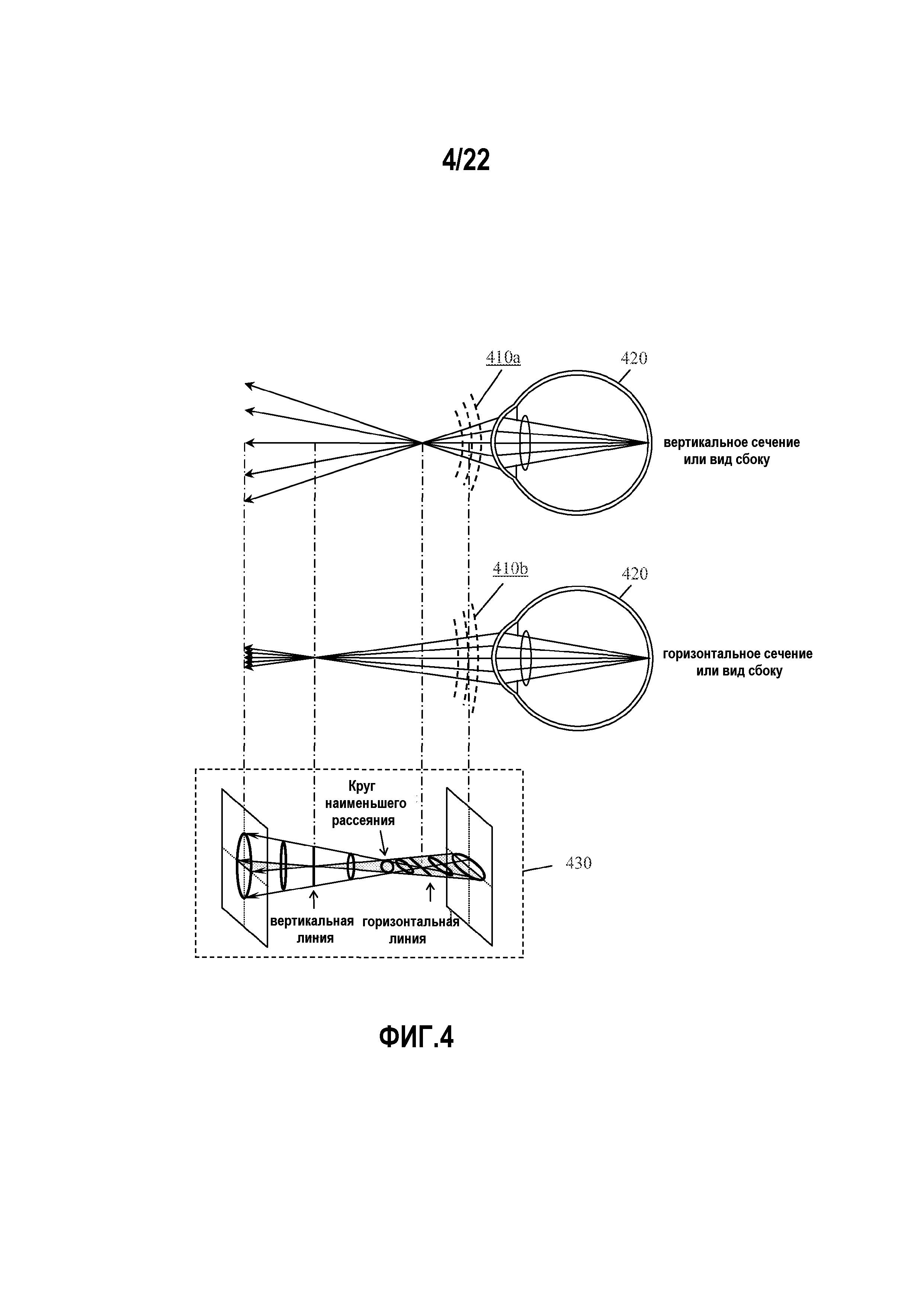
Фигура 4 показывает волновой фронт, выходящий из близорукого глаза, имеющего также астигматизм.
Фигура 5 показывает схематическое изображение одного варианта осуществления, в котором для компенсации сферической аномалии рефракции волнового фронта от глаза используется устройство динамической компенсации дефокуса.
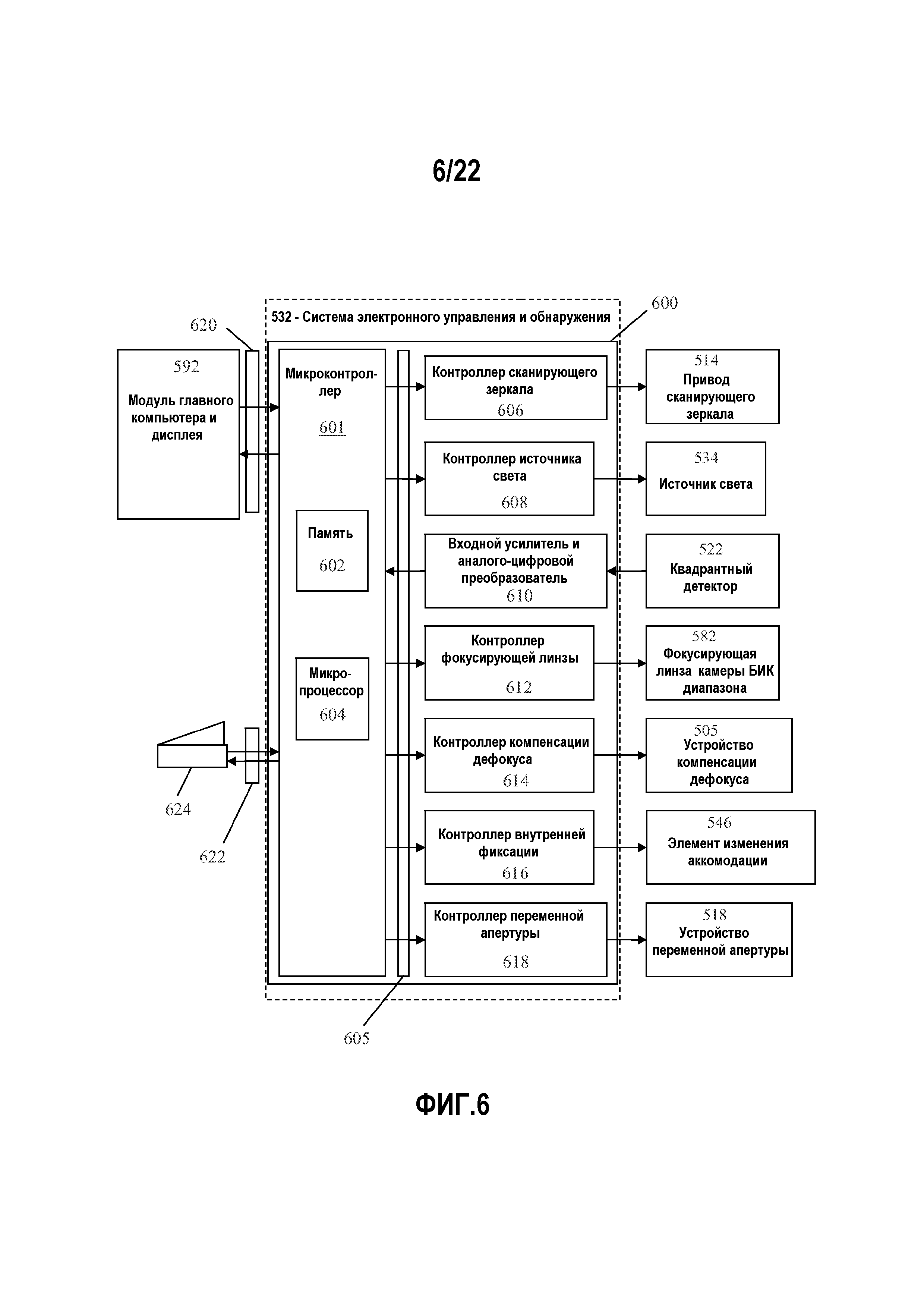
Фигура 6 показывает блок-схему типичной системы электронного управления и обнаружения, показанной на фигуре 5.
Фигура 7 иллюстрирует операционный микроскоп с микродисплеем, установленным на сопряженной плоскости объекта в траектории формирования изображений.
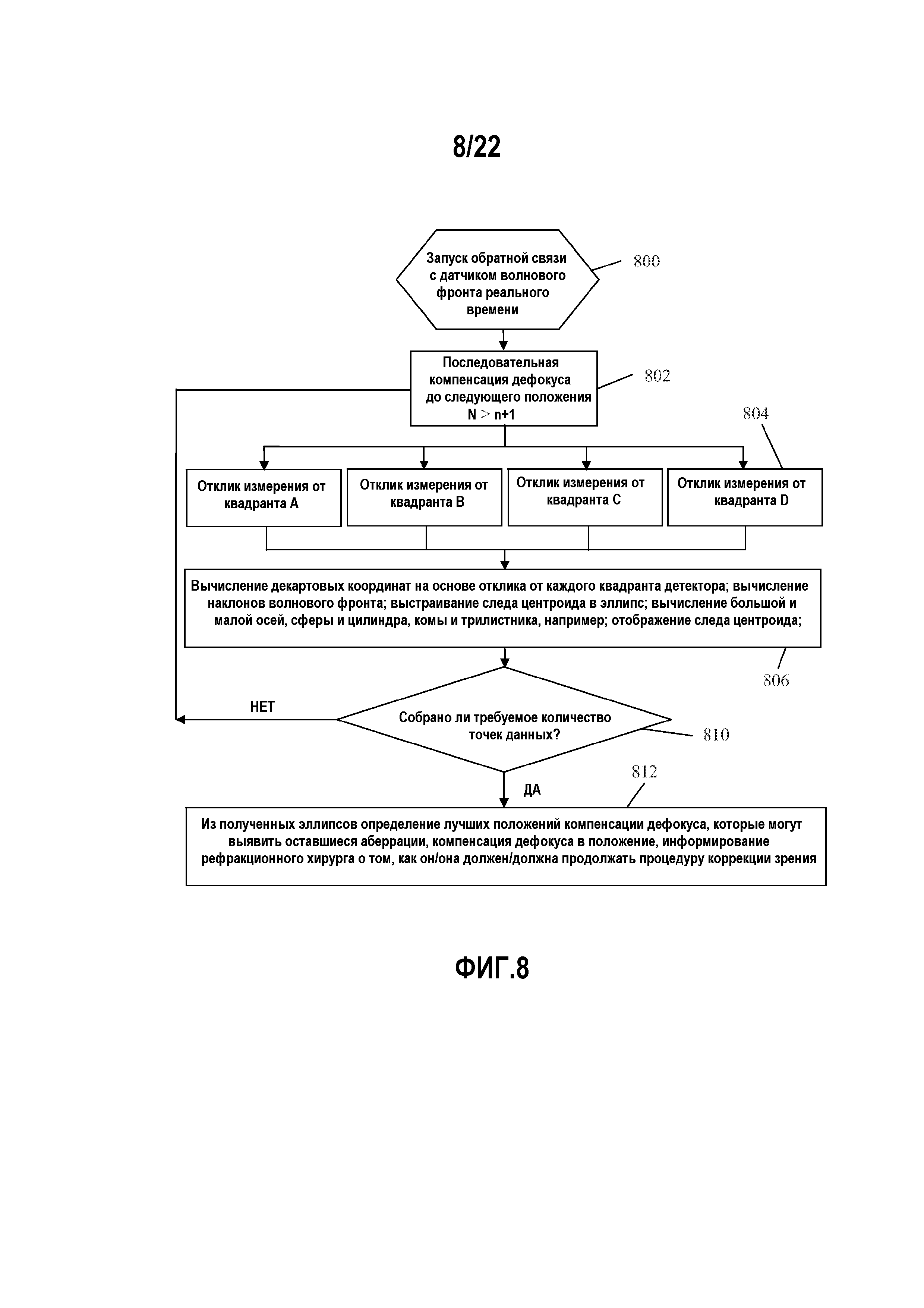
Фигура 8 показывает примерную блок-схему встроенного алгоритма, позволяющего сканировать дефокус для определения наилучших положений компенсации дефокуса, которые могут выявить оставшуюся аберрацию (аберрации).
Фигура 9A показывает схематическую диаграмму примерного варианта осуществления устройства/системы, содержащего/ей датчик волнового фронта для получения изображения глаза и компьютер с цифровым видеозаписывающим устройством, связанный с монитором.
Фигура 9B показывает примерную блок-схему этапов, выполняемых примерным вариантом осуществления.
Фигура 9C показывает скриншот дисплея, полученный примерным вариантом осуществления.
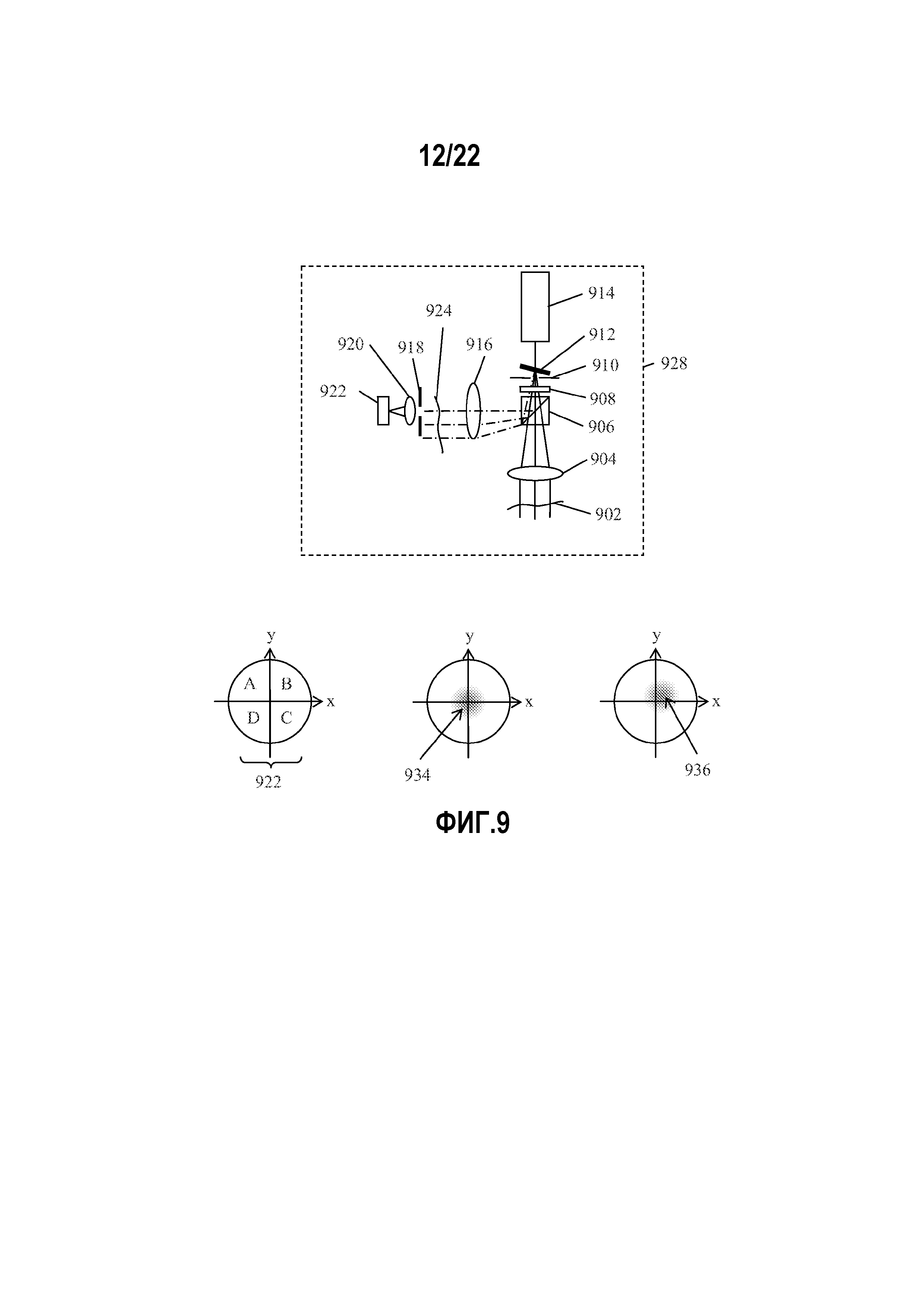
Фигура 9 показывает квадрантный детектор с четырьмя фоточувствительными зонами A, B, C и D, и пятно изображения на квадрантном детекторе для плоского парциального волнового фронта и для неплоского парциального волнового фронта.
Фигура 10 показывает выборку последовательным датчиком волнового фронта нескольких парциальных волновых фронтов по кольцу плоского волнового фронта, волновой фронт с дефокусом и волновой фронт с астигматизмом, соответствующее пятно изображения на квадрантном детекторе и последовательное перемещение соответствующих положений центроида при отображении на мониторе.
Фигура 11 показывает сечения волновых фронтов с различной компенсацией дефокуса и соответствующее изменение двумерной картины центроида точек данных для глаза, имеющего только дефокус или сферическую аномалию рефракции.
Фигура 12 показывает соответственно вертикальный и горизонтальное сечения волновых фронтов с различной компенсацией дефокуса и соответствующее изменение двумерной картины центроида точек данных для глаза, имеющего как дефокус, так и астигматизм.
Фигура 13 показывает примерную блок-схему основных этапов нахождения большой и малой оси и, следовательно, сферической и цилиндрической аномалий рефракции измеренного волнового фронта на основе двумерной картины центроида точек данных.
Фигура 13A показывает блок-схему примерного варианта осуществления;
Фигура 13B показывает блок-схему этапов, включенных в вариант осуществления раскрываемого в настоящее время способа;
Фигуры 13C и 13D показывают скриншоты вывода информации пользователю в данном варианте осуществления;
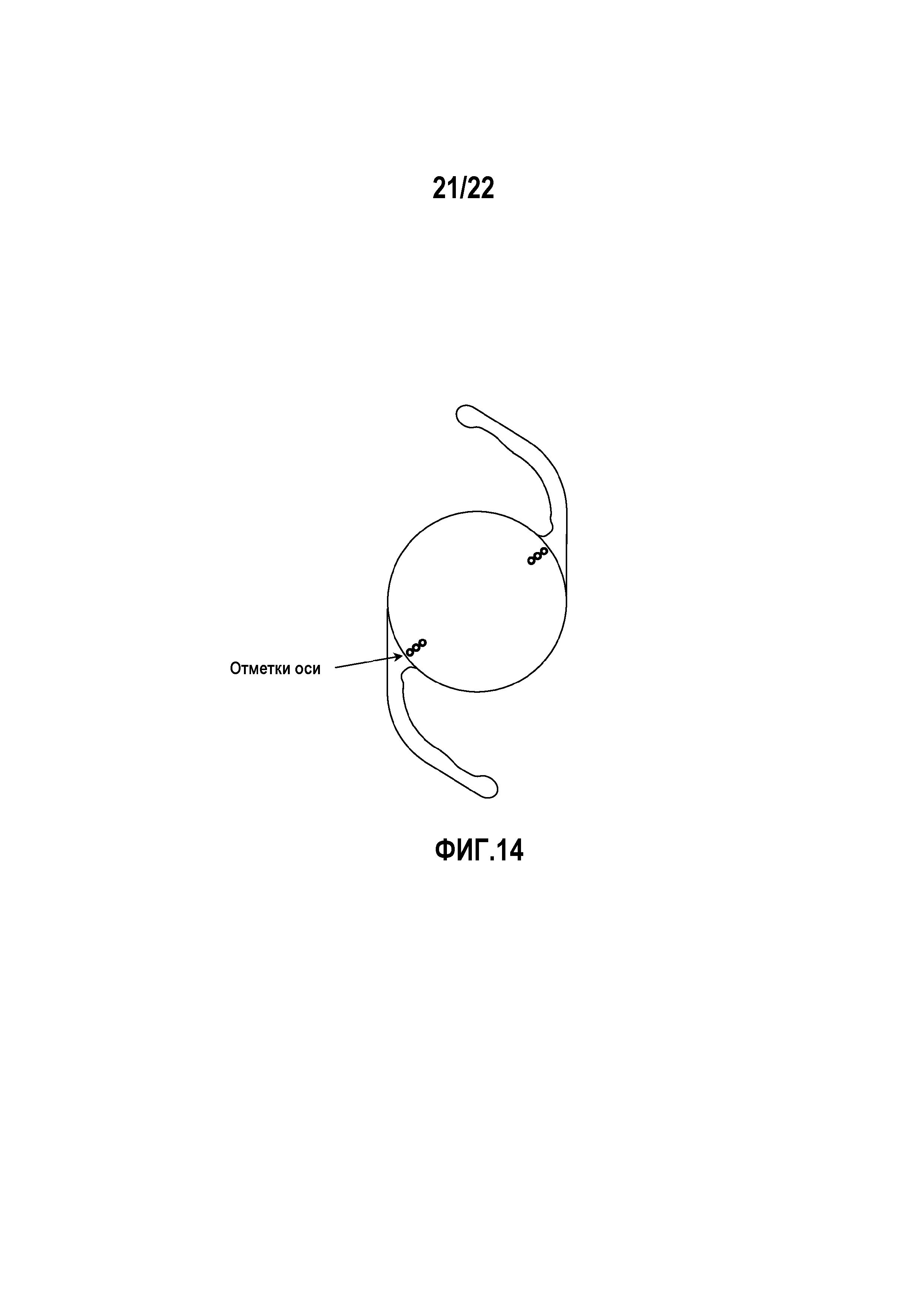
Фигура 14 показывает схему торической линзы, имеющей разметку оси.
Фигура 15 показывает блок-схему другого варианта осуществления устройства, в котором для коррекции некоторых выбранных компонентов аберраций волнового фронта используется динамическое устройство управления волновым фронтом.
Подробное описание примерных вариантов осуществления
Теперь будут сделаны подробные ссылки на различные варианты осуществления изобретения. Примеры данных вариантов осуществления проиллюстрированы прилагаемыми чертежами. Хотя изобретение будет описано в связи с данными вариантами осуществления, следует понимать, что это не подразумевает ограничения изобретения какими-либо вариантами осуществления. Напротив, подразумевается охват альтернатив, модификаций и эквивалентов, которые могут быть сделаны в пределах сущности и объема изобретения, что определяется прилагаемой формулой изобретения. В последующем описании для обеспечения глубокого понимания различных вариантов осуществления излагаются многочисленные характерные детали. Тем не менее, различные варианты осуществления могут использоваться без некоторых или всех этих характерных деталей. В других случаях хорошо известные детали процесса не были описаны подробно, чтобы без необходимости не усложнять настоящее изобретение. Кроме того, каждое появление фразы "примерный вариант осуществления" в различных местах описания не обязательно означает обращение к одному и тому же примерному варианту осуществления.
Одним вариантом осуществления является устройство, содержащее динамический датчик волнового фронта, способный принимать участок волнового фронта и выводить значения положений, указывающих на положение сфокусированных парциальных волновых фронтов, причем участок волнового фронта содержит множество парциальных волновых фронтов, управляемый элемент коррекции волнового фронта, расположенный так, чтобы перехватить участок волнового фронта до его падения на датчик волнового фронта, и контроллер, соединенный с управляемым элементом коррекции волнового фронта, способный управлять управляемым элементом коррекции волнового фронта для коррекции выбранных компонентов аберрации волнового фронта с целью более эффективного обнаружения оставшихся компонентов аберраций участка волнового фронта.
Одним примерным вариантом осуществления является устройство, содержащее: динамический датчик волнового фронта, способный принимать волновой фронт и выводить значения положения, указывающие на положение сфокусированных парциальных волновых фронтов, причем волновой фронт содержит совокупность парциальных волновых фронтов, и волновой фронт включает компоненты аберрации в виде неплоской волны; управляемый элемент коррекции волнового фронта, расположенный так, чтобы перехватить волновой фронт до его падения на датчик волнового фронта; и контроллер, соединенный с управляемым элементом коррекции волнового фронта, способный управлять управляемым элементом смещения волнового фронта для смещения только выбранных компонентов аберрации волнового фронта в виде неплоской волны для более эффективного обнаружения оставшихся компонентов аберрации волнового фронта в виде неплоской волны.
Другим примерным вариантом осуществления является устройство, содержащее: фокусирующую линзу парциального волнового фронта, способную фокусировать парциальный волновой фронт, являющийся участком волнового фронта, образованного источником света, на пятне изображения, расположенном в фокальной плоскости, и причем волновой фронт включает компоненты аберрации в виде неплоской волны; последовательное устройство сканирования волнового фронта, способное последовательно проецировать различные участки падающего волнового фронта на фокусирующую линзу парциального волнового фронта; переменную апертуру, способную управлять размером парциального волнового фронта; устройство считывания положения, расположенное по существу в фокальной плоскости фокусирующей линзы парциального волнового фронта, способное указывать расположение пятна изображения на устройстве считывания положения; управляемый элемент коррекции волнового фронта, расположенный так, чтобы перехватить волновой фронт до его падения на датчик волнового фронта; и контроллер, соединенный с управляемым элементом коррекции волнового фронта, способный управлять управляемым элементом коррекции волнового для коррекции только выбранных компонентов аберрации волнового фронта в виде неплоской волны для более эффективного обнаружения оставшихся компонентов аберрации волнового фронта в виде неплоской волны.
Другим примерным вариантом осуществления является устройство, содержащее датчик волнового фронта, способный в реальном времени измерять величины аберраций волнового фронта, возвращенного глазом пациента, когда хирург просматривает изображение глаза пациента непосредственно во время процедуры коррекции зрения, и обеспечивать выходной сигнал, показывающий величины аберраций в реальном времени; и дисплей, соединенный с датчиком волнового фронта, способный показывать динамическое изображение, указывающий хирургу величины аберраций в реальном времени и видимый хирургом одновременно с просмотром изображения глаза пациента непосредственно во время процедуры коррекции зрения.
Следует понимать, что признаки различных вариантов осуществления описаны выше и во всей заявке могут объединяться и/или заменять друг друга.
Одним примерным вариантом осуществления является устройство для оптимизации процедур коррекции зрения, содержащее: узкий пучок света, направляемый на сетчатку пациента; динамическое устройство компенсации дефокуса, способное компенсировать дефокус волнового фронта от глаза; датчик волнового фронта, способный измерять локальный наклон нескольких парциальных волновых фронтов, выбранных по кольцу (диаметр которого можно динамически менять) по волновому фронту с компенсацией дефокуса; и устройство визуализации, способное отображать в реальном времени двумерную (2D) картину центроида точек данных, в которой каждое положение точки данных представляет собой соответствующий локальный наклон выбранных парциальных волновых фронтов.
Другим вариантом осуществления является способ оптимизации процедур коррекции зрения, содержащий: направление узкого пучка света на сетчатку пациента; динамическую компенсацию дефокуса волнового фронта от глаза пациента; измерение датчиком волнового фронта в реальном времени локального наклона нескольких парциальных волновых фронтов по кольцу (диаметр которого можно динамически менять) по волновому фронту с компенсацией дефокуса; и отображение в реальном времени двумерной (2D) картины центроида точек данных, в которой каждое положение точки данных представляет собой соответствующий локальный наклон выбранных парциальных волновых фронтов.
Распространяя общую идею коррекции некоторых компонентов аберрации волнового фронта на основе обратной связи об измерении волнового фронта в реальном времени для наилучшего выявления оставшихся компонентов аберрации, один вариант осуществления представляет собой устройство для оптимизации процедур коррекции зрения, содержащее: узкий пучок света, направляемый на сетчатку пациента; элемент коррекции волнового фронта, способный динамически корректировать только определенные компоненты аберрации волнового фронта от глаза пациента; датчик волнового фронта реального времени, способный измерять локальный наклон нескольких парциальных волновых фронтов, выбранных согласно определенному составу выборки из волновых фронтов с коррекций; и средство обратной связи, способное сопровождать коррекцию.
Другим вариантом осуществления является способ оптимизации процедур коррекции зрения, содержащий: направление узкого пучка света на сетчатку пациента; динамическую коррекцию только определенных компонентов аберрации волнового фронта от глаза пациента элементом коррекции волнового фронта; измерение датчиком волнового фронта реального времени локального наклона нескольких парциальных волновых фронтов, выбранных согласно определенному составу выборки из волновых фронтов с коррекцией; и сопровождение коррекции средством обратной связи.
В примерном варианте осуществления используется активная коррекция, а не только полностью пассивная компенсация некоторых компонентов (компонента) аберрации волнового фронта от глаза. Коррекция может осуществляться с использованием простой линзы с переменным фокусным расстоянием или эквивалента, или более сложного средства управления волновым фронтом. Ключевым отличием от предыдущих уровней техники является активная часть коррекции. Коррекцию можно сканировать и запланированную коррекцию можно динамически применить к одному или более конкретному компоненту (компонентам) аберрации.
Другой примерный вариант осуществления вовлекает конечного пользователя или управление встроенным алгоритмом в определение величины или диапазона коррекции, которую следует применить, на основе обратной связи об измерении волнового фронта в реальном времени. Одной целью является выделение ключевых признаков тех компонентов аберрации волнового фронта, которые необходимо в дальнейшем скорректировать во время процедуры коррекции зрения. Другой целью является усреднение шума и получение лучшего измерения аберраций глаза.
В другом примерном варианте осуществления выбирается волновой фронт и отображается результат измерений в реальном времени легко понятным рефракционному хирургу способом. В частности, выбором по кольцу волнового фронта с определенной компенсацией дефокуса или сканированием компенсации дефокуса может быть получена такая двумерная картина центроида точек данных, которая выстраивается в эллипс, причем круг и прямая линия являются предельными случаями эллипса, и, поступая так, можно достичь непосредственного представления сферо-цилиндрических аномалий рефракции.
В другом примерном варианте осуществления размер кольца выборки волнового фронта динамически меняется так, чтобы, в то время как простая для понимания двумерная картина центроида точек данных показывается конечному пользователю, выборка могла также покрыть большинство требуемых волновых фронтов. Встроенные алгоритмы могут использоваться для учета изменения размера кольца, а также для отображения эллипса или диаграммы, являющихся типичным представлением сферических и цилиндрических аномалий рефракции, что понятно специалистам, проводящим коррекцию зрения.
В другом примерном варианте осуществления волновой фронт выбирается согласно составу выборки во время коррекции некоторых аберраций низших порядков, так что можно явно выявить информацию о некоторых конкретных аберрациях волнового фронта высших порядков, или наоборот. Например, при динамической компенсации дефокуса и компенсации астигматизма наличие аберраций высших порядков (АВП), таких как кома, являющаяся очень распространенной АВП, с которой часто сталкиваются хирурги и для которой существуют техники хирургического вмешательства, может быть выявлено и отображено в формате, легко понятном клиническим специалистам-практикам.
Другой примерный вариант осуществления сопровождает размещение ИОЛ во время операции, таким образом подтверждая непосредственно в операционной оптимальное центрирование, наклон, круговую угловую ориентацию (в случае любых торических линз) и результаты рефракционной коррекции (т.е. интраоперационное подтверждение эмметропии или другой конечной цели рефракционной коррекции для пациента). А именно, двумерную картину центроида точек данных можно использовать для управления уменьшением наклона, придаваемого ИОЛ; при имплантации мультифокальной ИОЛ описываемое в настоящее время устройство можно использовать для управления и изменения размера выбранного кольца для проверки фокусного расстояния имплантированной мультифокальной ИОЛ; при имплантации аккомодационной интраокулярной линзы (АИОЛ) описываемое в настоящее время устройство можно использовать для измерения того, обеспечивает ли имплантированная АИОЛ желаемый диапазон аккомодации; при имплантации торической ИОЛ описываемое в настоящее время устройство можно использовать для управления центрированием и периферической угловой ориентацией при размещении торической ИОЛ.
Примерный вариант осуществления подтверждает правильность выбора преломляющей силы ИОЛ, особенно при послеоперационной коррекции рефракции роговицы у тех пациентов, у которых дооперационный выбор формул ИОЛ не дал приемлемых результатов.
Другой примерный вариант осуществления позволяет придавать форму и позиционировать роговичную накладку и/или вкладку ex vivo или in vivo.
Глаз без каких-либо оптических аберраций называется эмметропическим глазом, и нормальное зрение без аберраций называется эмметропией. В таком глазе с отличным зрением лучи света от удаленного объекта могут отчетливо фокусироваться на сетчатке, если глаз расслаблен. Именно это является целью лазерной или другой процедуры коррекции зрения. Поскольку для удаленного объекта волновой фронт, падающий на расслабленный эметропический глаз, может считаться плоским, то, когда направление распространения луча света меняется на противоположное, то есть, когда лучи света от точечного источника вблизи центральной ямки (fovea) проходят назад через оптическую систему глаза и выходят из глаза, волновой фронт также является плоским. Фигура 1 показывает плоский волновой фронт 110, выходящий из расслабленного эмметропического глаза 120.
Аберрации глаза традиционно делятся на аберрации низших и высших порядков. Аберрации низших порядков включают дефокус (также называемый сферической аномалией рефракции) и астигматизм (также называемый цилиндрической аномалией рефракции). Более общеупотребительными названиями двух разных типов дефокуса являются близорукость (миопия) и дальнозоркость (гиперметропия или гиперопия). Эти аномалии рефракции могут быть измерены авторефрактометром и составляют около 85 процентов всех аберраций глаза. Когда лучи света, испущенные точечным источником вблизи центральной ямки (fovea), проходят обратно через оптическую систему глаза с дефокусом и выходят из глаза, волновой фронт является либо сферически сходящимся, либо сферически расходящимся. Фигура 2 показывает сходящийся сферический волновой фронт 210, выходящий из миопического, или близорукого, глаза 220, и фигура 3 показывает расходящийся сферический волновой фронт 310, выходящий из гиперопического, или дальнозоркого, глаза 320.
Если астигматизма нет, сечение роговицы глаза имеет форму половины бейсбольного меча в разрезе. Кривизна, или крутизна, полусферы повсюду одинакова. Для сравнения рассмотрим роговицу, похожую на мяч для американского футбола, разрезанный пополам вдоль (в продольном направлении, через оба заостренных конца). Кривизна роговицы в продольном направлении (вдоль швов) не такая крутая, как в поперечном направлении. Такая роговица фокусирует свет не в одной точке, а в двух. Тот, кто имеет нескорректированный астигматизм, может видеть изображения смазанными и двоящимися. Роговица в форме мяча для американского футбола, разрезанного вдоль, является астигматической.
В глазу с астигматизмом лучи света от удаленного объекта фокусируются по двум перпендикулярным направлениям в двух точках, например, одна на сетчатке и другая за сетчаткой. Это случай глаза с астигматической роговицей, имеющей неравномерную кривизну, как у мяча для американского футбола, разрезанного вдоль. Две разные кривизны приводят к наличию двух различных фокальных точек. Существует несколько различных комбинаций астигматизма в зависимости от расположения фокальных точек. Среди них:
простой миопический астигматизм: одна точка перед сетчаткой, другая - на сетчатке;
сложный миопический астигматизм: обе фокальные точки перед сетчаткой;
простой гиперопический астигматизм: одна точка за сетчаткой, другая - на сетчатке;
сложный гиперопический астигматизм: обе фокальные точки за сетчаткой;
смешанный астигматизм: одна точка перед сетчаткой, другая - за сетчаткой.
Зачастую при наличии астигматизма как внутри глаза, так и на роговице, астигматизм внутри глаза имеет противоположную к астигматизму на роговице направленность. Две формы астигматизма могут, таким образом, компенсировать друг друга, и глаз не будет иметь значительной степени астигматизма.
Астигматический глаз обычно имеет два разных меридиана, перпендикулярных друг другу, из-за чего изображения фокусируются в разных плоскостях для каждого меридиана. Меридианы могут быть миопическими, гиперопическими или эмметропическими. Корригируют астигматизм обычно цилиндрическими или торическими линзами с разными преломляющими силами по разным конкретным направлениям.
Из-за астигматизма изображения вне зависимости от расстояния находятся не в фокусе. При астигматизме размытость можно минимизировать аккомодацией, или фокусировкой, чтобы поместить "круг наименьшего рассеяния" на сетчатку.
Для коррекции астигматиза, прежде чем размещать линзу перед или внутри глаза, необходимо определить положение оси цилиндрической линзы. При установлении угла оси наблюдатель располагается напротив пациента, и угол ориентации, равный нулю, находится слева от наблюдателя. Шкала считывается под горизонтальной линией, угол внизу составляет 90° и справа - 180°.
В случае астигматического глаза, или глаза с цилиндрической аномалией рефракции, волновой фронт, выходящий из точечного источника вблизи центральной ямки (fovea) глаза, больше не является осесимметричным по отношению к оптической оси и, вместо этого, волновой фронт имеет различное сферическое расхождение или схождение вдоль двух различных, но взаимно перпендикулярных азимутальных направлений.
Фигура 4 показывает волновой фронт, выходящий из глаза 420, являющегося близоруким и с астигматизмом (сложный миопический астигматизм). Заметим, что степень конвергенции волнового фронта после выхода из глаза различны для вертикального (вид сбоку) и горизонтального (вид сверху) сечений. Волновой фронт 410a в вертикальном сечении в случае вида сбоку изначально более расходящийся после выхода лучей света из глаза, чем волновой фронт 410b в горизонтальном сечении в случае вида сверху. Соответственно, форма пучка также не будет строго конической и осесимметричной относительно оптической оси. Как показано на трехмерном изображении 430, считая, что свет распространяется справа налево, форма сечения пучка (перпендикулярно к направлению распространения пучка) меняется с большего горизонтальный эллипс, на горизонтальную линию, на меньший горизонтальный эллипс с более короткой большой осью, на круг наименьшего рассеяния, на меньший вертикальный эллипс с более короткой большой осью, на вертикальную линию и затем на больший вертикальный эллипс. Следует отметить, что это формы сечений пучка, которые не следует путать с двумерной картиной центроида точек данных, которая будет обсуждаться ниже, хотя между ними есть соответствие и сходство.
Что касается волнового фронта, необходимо отметить, что представление геометрической оптики не является точным. Как только пучок фокусируется вблизи положения наилучшего фокуса, для понимания изменений волнового фронта следует применять волновую оптику. В самом деле, пучок ведет себя как Гауссов пучок вблизи области наилучшего фокуса, и кривизна волнового фронта не постоянна, а постепенно меняется со сходящегося волнового фронта на чуть менее сходящийся волновой фронт, затем на немного сходящийся волновой фронт и, наконец, на плоский и затем расходящийся волновой фронт. В месте, где пучок имеет форму горизонтальной линии, вид сбоку, или вертикальное сечение волнового фронта, фактически плоское, поскольку это точка, в которой соответствующий волновой фронт в вертикальном сечении меняется со сходящегося сферического волнового фронта на расходящийся сферический волновой фронт. Аналогично, в месте, где пучок имеет форму вертикальной линии, вид сверху, или горизонтальное сечение волнового фронта является плоским, так как это положение, при котором соответствующий волновой фронт в горизонтальном сечении меняется со сходящегося сферического волнового фронта на расходящийся сферический волновой фронт. Позже соответствие между изменением формы пучка и изменением связанного с ним волнового фронта будет обсуждаться подробнее.
Следует отметить, что острота зрения и зрительная работоспособность связаны с аберрациями волнового фронта, но параметры, используемые для описания зрения, не совпадают с рецептом на очки или контактные линзы, который можно взять с собой в оптику и заполнить. Зрение обычно описывается формулой Снеллена, например, 20/40. При зрении 20/40 объект, который может увидеть пациент с 20 футов, пациент со зрением 20/20 может увидеть с 40 футов. Поэтому тот, у кого зрение 20/400, видит еще хуже; чем больше знаменатель, или второе число, тем хуже зрение. В крайнем случае, если зрение так слабо, что человек не может увидеть самую большую букву «E» в оптометрической таблице, способом измерения зрения становится количество пальцев, которые он может сосчитать. Если кто-то «может сосчитать пальцы с 3 футов», это означает, что обследуемый глаз имеет зрение меньше 20/400 и может только определить количество пальцев с расстояния трех футов. Золотым стандартом отличного зрения является зрение 20/20, хотя есть пациенты, способные видеть лучше, чем «превосходно». Поскольку большинство пациентов используют оба глаза одновременно, зрение проверяется отдельно для каждого глаза, как и при выписке рецепта пациенту. В таблице ниже показано соответствие остроты зрения (в футах и метрах) аномалиям рефракции в диоптриях, которые являются единицей измерения оптической силы линзы, обратно пропорциональной фокусному расстоянию, выраженному в метрах (то есть 1/м).
В рецептах для коррекции зрения, если глаз имеет только близорукость, будет только одно отрицательное число диоптрий. Знак минус указывает на близорукость, или миопию. Число после знака минус сообщает степень, или "тяжесть" близорукости. Например, -1,00D означает близорукость величиной в 1 диоптрию, -5,25D означает близорукость величиной 5,25 или 51/4 диоптрий. Это больше, чем близорукость -1,00D, и требует более толстых минусовых стекол.
Если глаз имеет только дальнозоркость, будет только одно положительное число диоптрий. Знак плюс указывает на дальнозоркость или гиперопию. Число после знака плюс сообщает степень или "тяжесть" дальнозоркости. Например, +1,00D означает дальнозоркость величиной в 1 диоптрию, +5,75D означает дальнозоркость величиной 5,75 или 5¾ диоптрий. Это больше, чем дальнозоркость +1,00D, и требует более толстых плюсовых стекол.
Если глаз астигматический, описать числа сложнее. Фактически в рецептах для астигматического глаза существуют 3 числа. Общая формула S+C×Axis. И S, и C могут быть и положительными, и отрицательными числами. S обозначает то, что называется "сферой", или сферической частью рецепта. C обозначает величину астигматизма или цилиндрическую часть рецепта. Axis (Ось) - это число от 0 до 180 градусов; это число говорит о том, где имеется отличие в кривизне сетчатки, или как ориентирован или выровнен астигматизм. Этого недостаточно для определения величины астигматизма, необходимо узнать, где именно есть отличие в кривизне, указав координаты. Следовательно, в рецепте при астигматизме определенного вида и степени имеются три числа. Чем больше второе число, С, тем сильнее астигматизм. Существует несколько категорий астигматизма, и точный тип астигматизма устанавливается на основе анализа трех чисел рецепта. Например, -2,00+1,50×180 означает сферическую аномалию рефракции минус 2 диоптрии с астигматизмом плюс 1,50 диоптрии и осью 180 градусов; +4,00+3,00×89 означает сферическую аномалию рефракции плюс 4 диоптрии с астигматизмом плюс 3 диоптрии и осью 89 градусов.
Аберрации высших порядков означают другие искажения, получаемые волновым фронтом света, когда он проходит через глаз с неровностями его преломляющих частей (слезная пленка, роговица, внутриглазная жидкость, хрусталик и стекловидное тело). Ненормальная кривизна роговицы и хрусталика может вносить вклад в аберрации высших порядков (АВП). Тяжелые аберрации высших порядков могут также возникать из-за повреждения роговицы при хирургии глаза, травме или заболевании. Помутнение естественной линзы глаза из-за катаракты может также привести к аберрациям высших порядков. Аберрации также могут возникнуть, когда при высыхании глаза уменьшается слезная пленка, помогающая отклонять или преломлять лучи света для достижения фокуса. Среди аберраций высших порядков можно назвать кому, трилистник и сферическую аберрацию. Аберрации высших порядков могут быть измерены датчиком волнового фронта и составляют около 15 процентов полного числа аберраций глаза.
Несмотря на то, что датчики волнового фронта обычно используются для проведения измерений перед коррекцией зрения для получения рецепта на процедуру коррекции зрения, и снимок результата измерения волнового фронта во время или после процедуры коррекции зрения может сообщить специалисту, выполняющему коррекцию, проходит ли коррекция надлежащим образом, статическое изображение, или снимок, карты волнового фронта не может мгновенно направлять или выверять процедуру коррекции зрения в реальном времени для оптимизации результата коррекции зрения. Недостаток объективной обратной связи в реальном времени приводит к необходимости одной или более сопутствующих процедур для согласования или точного регулирования коррекции зрения, а это дорого, по существу рискованно, требует времени и затруднительно как для окулиста, так и для пациента.
Хотя и существуют изобретения, посвященные управляемым лазерным процедурам коррекции зрения, использующим измерение волнового фронта по принципу петли обратной связи (см., например, US 6428533, US 6887232, US 7232463, US 6394999 и US 6508812) и также отображению результатов измерения волнового фронта в реальном времени (см., например, US 6572230, US 6609794 и US 6631991), управление и отображение неудобны для пользователей, потому что управление с помощью петли обратной связи не дает клиническому специалисту свободы оптимизации процедуры коррекции зрения в реальном времени, и отображение происходит не в том формате, который легко понятен специалисту-практику. Кроме того, предыдущие системы адаптивной оптики на основе датчиков волнового фронта, имеющие встроенный компенсатор (компенсаторы) волнового фронта, обычно работают только в режиме включения-выключения, позволяя конечному пользователю только включать или выключать компенсатор (компенсаторы) волнового фронта для компенсации некоторых аберраций низших порядков из всех аберраций волнового фронта глаза (см., например, US 5777719, US 5949521, US 6095651, US 6948818, US 7416305, US 6595643, US 6709108, US 6964480, US 7448752, US 7419264, US 7475989, US 6631991, US 6634750, US 7226443 и US 7237898). Они не дают возможности конечному пользователю динамически, или частично, устранить или планово скорректировать некоторые выбранные компоненты аберрации волнового фронта, чтобы таким образом выявить важные признаки остальных аберраций волнового фронта в подчеркнутой или явной манере. Кроме того, традиционный способ представления результата измерения волнового фронта, обычно в виде двумерной карты волнового фронта или полиномиальных коэффициентов Цернике, вовсе не является легко понятным для специалистов-практиков или рефракционных хирургов. Поэтому клиническим специалистам часто бывает трудно интерпретировать измерения волнового фронта во время процедуры коррекции зрения для оптимизации результата коррекции.
Далее описываются примерные варианты осуществления, обеспечивающие непрерывную обратную связь с измерением волнового фронта в реальном времени в форме видео, а не снимка, понятную специалисту-практику по коррекции зрения во время проведения процедуры коррекции зрения. Это позволяет специалисту-практику по коррекции зрения динамически корректировать или частично удалять только некоторые компоненты аберрации волнового фронта, чтобы выявить или даже усилить клинически значимый признак (признаки) оставшихся аберраций волнового фронта, требующих дальнейшей коррекции. Наряду с этим, результат измерения волнового фронта необходимо представить в такой форме, которую легко интерпретировать и понять. Идентификация этих пропущенных признаков позволит более просто оптимизировать процедуру коррекции зрения в реальном времени.
Согласно одному или более примерным вариантам осуществления, дефокусированный компонент волнового фронта от глаза компенсируется планово и активно по указанию конечного пользователя или по некоторым встроенным алгоритмам в ответ на обратную связь в реальном времени и/или отображение измеренного волнового фронта. Плановая и активная компенсация используется не только для компенсации дефокуса волнового фронта, что может также помочь преодолеть предел динамического диапазона датчика волнового фронта для измерения локального наклона выбранного парциального волнового фронта, но также и для того, чтобы более ясно показать основной признак (признаки) другого компонента (компонентов) аберрации волнового фронта, тем самым позволяя специалисту-практику по коррекции зрения или рефракционному хирургу точно регулировать процедуру коррекции зрения и минимизировать оставшуюся аберрацию (аберрации) волнового фронта в реальном времени. Что касается выбора и отображения в реальном времени результатов измерений волнового фронта, выборка по кольцу позволяет вывести локальный наклон выбранных парциальных волновых фронтов на монитор в виде двумерной картины центроида точек данных, которые можно выстроить в круг, или эллипс, или прямую линию, таким образом прямо определив две главные аномалии рефракции, а именно сферическую и цилиндрическую аномалии рефракции, а также ось цилиндра/астигматизм, или выстроить в кардиоиду в случае комы или других несимметричных форм высших порядков. В результате рефракционный хирург может просто понять результат измерений волнового фронта и, соответственно, точно отрегулировать процедуру коррекции зрения.
Следует отметить, что из всех аберраций волнового фронта сферические аномалии рефракции изменяются в наибольшем диапазоне (чуть ли не до ±30 диоптрий в некоторых крайних случаях) для разных глаз, тогда как все другие компоненты аберрации волнового фронта, такие как астигматизм, обычно имеют гораздо меньший разброс. Кроме того, во время рефракционной хирургии при удалении хрусталика глаза афакичный глаз имеет совершенно другие значения диоптрий рефракционных аномалий, чем факичный глаз, причем различие доходит до 20 диоптрий. Поскольку динамический диапазон датчика волнового фронта для регистрации локального наклона выбранного парциального волнового фронта ограничен, то желательно установить устройство компенсации дефокуса на пути луча датчика волнового фронта, чтобы просто скомпенсировать сферическую аномалию рефракции, так чтобы можно было измерить волновой фронт со скомпенсированным дефокусом датчиком волнового фронта. Однако, как упоминалось выше, датчики волнового фронта предыдущего уровня техники с компенсаторами волнового фронта или системы адаптивной оптики, как правило, все работают в режиме включения-выключения, только включая или выключая компенсацию волнового фронта. Эти возможности недостаточно помогают рефракционному хирургу понять, как следует продолжать в реальном времени рефракционную коррекцию, чтобы достичь наилучшей коррекции зрения. Чтобы преодолеть этот недостаток, рефракционный хирург или встроенный алгоритм могут выборочно устранять или корректировать определенный компонент (компоненты) аберрации волнового фронта, таким образом делая возможным выявление оставшейся аберрации (аберраций) в «преувеличенном» или «усиленном» виде. В результате рефракционный хирург может в реальном времени видеть, как ему/ей продолжать процедуру коррекции зрения, чтобы устранить оставшуюся аберрацию (аберрации), подтвердить результаты и задокументировать величину и сущность скомпенсированных аберраций.
Фигура 5 показывает один вариант осуществления динамической системы детектирования волнового фронта, в которой для коррекции сферического компонента аномалии рефракции волнового фронта от глаза используется устройство компенсации дефокуса.
Последовательный датчик 528 волнового фронта имеет первую линзу 504, которая фокусирует линейно поляризованный входящий пучок света, имеющий волновой фронт 502. Фокусируемый пучок проходит через поляризационный делитель 506 пучка (polarization beam splitter, PBS), установленный так, что пропускаемое им направление поляризации параллельно направлению поляризации входящего пучка. В результате линейно поляризованный сходящийся пучок пройдет через PBS 506. Четвертьволновая пластинка 508 расположена за PBS 506, причем быстрая ось ориентирована так, что после прохождения через четвертьволновую пластинку 508 появляется пучок с круговой поляризацией. Микроотверстие 510, расположенное за четвертьволновой пластиной 508 и прямо напротив сканирующего зеркала 512, служит для отклонения света, не исходящего напрямую из исследуемого волнового фронта пучка света.
Входящий сходящийся пучок после прохождения через микроотверстие 510 фокусируется на отражательной поверхности наклонного сканирующего зеркала 512, установленного на валу двигателя 514. Пучок света, отраженный зеркалом, является расходящимся, причем направление его главного центрального луча меняется в зависимости от угла наклона сканирующего зеркала 512 и углового положения двигателя 514. Ожидается, что отраженный пучок все еще имеет круговую поляризацию, но направление вращения плоскости поляризации изменится с левого на правое или с правого на левое. Поэтому после прохождения через четвертьволновую пластинку 508 во второй раз на обратном пути, пучок снова становится линейно поляризованным, но направление поляризации теперь перпендикулярно исходному входящему пучку. Таким образом, поляризационный делитель 506 пучка будет преимущественно отклонять обратный пучок влево, что показано прерывистыми лучами света на фиг.5.
Вторая линза 516 расположена слева рядом с PBS 506 для коллимации отраженного расходящегося пучка и для получения реплики исходного входящего волнового фронта. Из-за наклона сканирующего зеркала реплицированный волновой фронт смещен в поперечном направлении. Апертура 518 расположена за второй линзой 516 и прямо напротив фокусирующей линзы 520 парциального волнового фронта для выбора малого участка реплицированного волнового фронта. Фокусирующая линза 520 парциального волнового фронта фокусирует выбранный парциальный волновой фронт на устройстве 522 считывания положения, которое используется для определения центроида пятна сфокусированного света, созданного последовательно выбранными парциальными волновыми фронтами. Вращая двигатель 514 и меняя угол наклона сканирующего зеркала 512 непрерывно или поэтапно, можно управлять величиной радиального и азимутального смещения реплицированного волнового фронта, так что можно выбрать любую часть реплицированного волнового фронта для последовательного прохождения через апертуру 518. В результате весь волновой фронт исходного входящего пучка можно описать так же, как и в случае стандартного датчика волнового фронта Шака-Гартмана, за исключением того, что центроид каждого парциального волнового фронта теперь получают не параллельно, а последовательно.
Когда угол наклона сканирующего зеркала остается постоянным, угловое сечение волнового фронта 502 сканируется последовательно. Радиус углового сечения можно менять, меняя наклон сканирующего зеркала.
Модуль 535 источника света, содержащий источник 534 света, коллимирующую линзу 537 и элемент 536 направления пучка, используется для направления узкого пучка света на сетчатку глаза 538 пациента. В US20080278683 упоминалось, что модуль 583 формирования инфракрасного изображения может использоваться для отслеживания положения центральной ямки, а также для выравнивания и регистрации глаза. Кроме того, модуль 542 внутренней фиксации и проекции остроты зрения, как показано на фигуре 5, может содержать микродисплей 544, линзу 546 с переменным фокусом и элемент 548 направления пучка и выполнять функцию изменения аккомодации глаза пациента, а также проверки остроты зрения пациента. Когда аккомодационный механизм глаза пациента не подвергается анестезии, непрерывное измерение аберраций волнового фронта по всему диапазону аккомодации обеспечит оптимальный рецепт для коррекции зрения. Несмотря на то, что эти два модуля изображены, следует также понимать, что они не являются необходимыми в варианте осуществления устройства.
Тем не менее, в качестве одного объекта одного варианта осуществления, модуль внутренней фиксации/проекции остроты зрения может также использоваться для изменения аккомодации глаза пациента, при этом измерения волнового фронта проводятся также по всему диапазону аккомодации. Во время аккомодации, хотя ось фиксации может не меняться, что означает правильное выравнивание пациента, фактическая ось фиксации или центр могут меняться, указывая на псевдоаккомодацию или несимметричную коррекцию зрения. Датчик волнового фронта может регистрировать изменение и определять коррекцию аккомодации.
В качестве другого объекта одного варианта осуществления, модуль внутренней фиксации/проекции остроты зрения может также использоваться для направления взгляда пациента в сторону от оси, чтобы падающий лазерный пучок можно было направлять на разные участки сетчатки, а не только на область центральной ямки. Этого можно достичь, включая определенный пиксель или группу пикселей микродисплея 544, и в результате глаз будет фиксироваться на «включенном» пикселе (пикселях), позволяя обнаружить аберрации волнового фронта глаза при рассеянии света как в центре, так и на периферии. Поступая так, аберрации волнового фронта можно измерить как функцию места падения падающего пучка света и таким образом получить двумерный массив аберраций волнового фронта для света, рассеянного с разных участков сетчатки. Такой двумерный массив измерений волнового фронта предоставит специалисту-практику по коррекции зрения дополнительную значимую информацию, помимо обычных результатов измерений аберраций волнового фронта только из центрального участка рассеяния света. Это дополнительно оптимизирует рецепты для коррекции аберраций в том смысле, что, дополнительно к центральному зрению, можно также оптимизировать и периферическое зрение.
На фигуре 5 активная компенсация дефокуса достигается изменением эффективного фокусного расстояния, или сферической преломляющей силы линзы или комбинации 505 линз, расположенной в оптическом пути напротив датчика 528 волнового фронта. Изменение эффективного фокусного расстояния можно откалибровать для определения коррекции в диоптриях (например), требуемой для изменения фактического волнового фронта, возвращенного сетчаткой, на плоскую волну. Эта коррекция в диоптриях является рецептом рефракции для коррекции зрения пациента. Процедуры получения этого рецепта для сферических и астигматических аберраций подробно описываются ниже.
Следует отметить, что разница между настоящим вариантом осуществления и вариантами, раскрытыми в US7445335 и US20080278683, состоит в том, что элемент 505 динамической компенсации дефокуса установлен на пути света. В предыдущих вариантах осуществления упоминалась только функция компенсации или обнуления дефокуса, если такой элемент использовался. В настоящем варианте осуществления, дополнительно к функции компенсации или обнулению, элемент 505 компенсации дефокуса также допускает активную коррекцию или частичное устранение сферического компонента аномалии рефракции в положительном или отрицательном направлении, чтобы сделать волновой фронт более или менее сферически расходящимся или сходящимся, и активная коррекция проводится по указанию рефракционного хирурга или управляется встроенным алгоритмом согласно отображению в реальном времени и/или обратной связи об измерении волнового фронта.
Одним объектом варианта осуществления является использование устройства компенсации дефокуса для частичной компенсации любой сравнительно большой сферической аномалии рефракции, так, чтобы все оставшиеся сферические и цилиндрические аномалии рефракции и другие аберрации высших порядков попадали в динамический диапазон измерения датчика волнового фронта. Если так, то линза с переменным фокусным расстоянием играет роль оптического компонента, который может также значительно увеличивать динамический диапазон измерения комбинированной системы детектирования волнового фронта. Другим объектом настоящего варианта осуществления является сканирование компенсации дефокуса в диапазоне измерения волнового фронта с изменением или без изменения аккомодации глаза в диапазоне аккомодации так, чтобы можно было наиболее точно измерить аномалии рефракции глаза.
Следует отметить, что устройство компенсации дефокуса, описанное на фигуре 5, может включать в себя набор сконфигурированных линз, позволяющий смещать диапазон фокусировки вдоль оптической оси обратного пучка. Положение и осевая отнесенность данных линз обеспечивает коррекцию, которая может активно удалить или отрегулировать сферический компонент аномалии рефракции прошедшего пучка. Такая активная фокусировка меняет дивергенцию или конвергенцию пучка, делая возможным соответствие или совпадение свойств фокусировки пучка, чтобы усилить другие свойства аберрации, такие как появление эллиптической картины пучка, указывающей на наличие астигматизма. Такой «процесс подбора» действительно меняет сферическую силу такого пучка, при этом точно известна величина компенсационного изменения фокуса. Линейный фокальный сдвиг первого порядка, вносимый корректирующей активной линзой (линзами), не меняет свойств других имеющихся аберраций, а имеет основной целью выявление и выделение основных существующих аберраций высших порядков. Чувствительность к определению существующих аберраций высших порядков растет при более точном положении подбора, когда сферический компонент аберрации аномалии рефракции «совмещается» или «подбирается», позволяя лучше определить и обнаружить изменения волнового фронта, вызванные меньшими значениями наклона, которые могут быть замаскированы большими значениями наклона волнового фронта сферической волны.
Это можно представить, рассматривая глобус Земли, имеющий в основном сферическую форму с мириадами малых изменений наклона, вызванных локальными изменениями местности, причем горные хребты образуют положительные изменения локального наклона, а долины образуют отрицательные изменения наклона. Если бы нужно было спрямить большие линейные сферические участки Земли, оставшиеся небольшие изменения наклона становились бы все более видимы, и, кроме того, лучше бы определялась несферичность эллиптической в общем формы глобуса. Такая активная компенсация дефокуса действует только на линейный сферический компонент зарегистрированного обратного пучка.
Следует отметить, что, хотя в качестве элемента компенсации дефокуса на фигуре 5 используется комбинация положительной и отрицательной линзы с максимальным относительным смещением, могут использоваться другие оптические элементы с переменным фокусом, включая жидкую или твердую линзу (линзы) с переменным фокусом, звуковая катушка или подвижная линза (линзы) с мотором, жидкокристаллическая линза (линзы), акустооптическая линза (линзы), деформируемое зеркало (зеркала) и диафрагма (диафрагмы). Не требуется располагать элемент компенсации дефокуса прямо напротив датчика волнового фронта, он может располагаться в любом месте вдоль оптического пути, поскольку выполняет функцию компенсации дефокуса волнового фронта. В самом деле, в целях компактности элемент компенсации дефокуса может иметь другой оптический элемент (элементы) внутри датчика 528 волнового фронта. Например, он может комбинироваться с передней фокусирующей линзой 504 последовательного датчика 528 волнового фронта. Такой последовательный датчик волнового фронта реального времени может быть выполнен в очень малом размере и поэтому встроен в большое количество систем оптической визуализации или измерительных систем, таких как операционный микроскоп для коррекции рефракции глаза. Следует также отметить, что, хотя последовательный датчик 528 волнового фронта был показан на фигуре 5, могут также использоваться другие виды датчиков волнового фронта, способные обеспечить измерение волнового фронта, включая датчик Шака-Гартмана, Тальбота-Муаре, Чернинга, отслеживание лучей, фазовое различие и интерферометрические датчики волнового фронта.
Система 532 электронного управления и обнаружения координирует активацию всех активных элементов, включая устройство 505 компенсации дефокуса, фокусирующую линзу 582 камеры 584 формирования изображения ближнего ИК диапазона, элемент 546 изменения аккомодации проектора 542 внутренней фиксации/остроты зрения и другие.
Фигура 6 представляет собой подробную блок-схему примерного варианта осуществления системы 532 электронного управления и обнаружения. Печатная монтажная плата (ППМ) 600 включает в себя микроконтроллер 601, имеющий память 602 для хранения программного кода и данных, и блок 604 обработки данных для исполнения программного кода и обработки данных. Микроконтроллер имеет интерфейс 605 ввода/вывода (показан стрелками), соединенный с различными управляющими модулями 606-618. Управляющие модули связаны с различными компонентами детерминированной динамической системы детектирования волнового фронта, показанной на фигуре 5, использующей стандартные технологии.
ППМ 600 также включает в себя главный интерфейс 620 для связи с главным компьютером и модулем 592 отображения и пользовательский интерфейс 622 для связи с устройством пользовательского интерфейса, таким как ножная педаль 624. Ножная педаль может дать хирургу возможность увеличивать или уменьшать масштаб, управляя положением дефокусирующего механизма.
Память 602 способна хранить программы, исполняемые для осуществления описанных ниже алгоритмов управления детерминированной динамической системой детектирования волнового фронта, описанной на фигуре 5. Различные модули, показанные на фигуре 6, могут быть установлены отдельно или встроены в микросхемы ASIC или другие программируемые устройства.
Микроконтроллер 601 может посылать управляющий сигнал на контроллер 606 сканирующего зеркала, связанный с приводом сканирующего зеркала, для перемещения сканирующего зеркала 514 и может посылать управляющие сигналы на контроллер 608 источника света для включения и выключения источника 534 света. Кроме того, микроконтроллер может принимать сигналы квадрантного детектора 522, как показано на фигуре 5, через входной усилитель и аналого-цифровой преобразователь 610. Кроме того, микроконтроллер может также управлять фокусирующей линзой 582 камеры ближнего ИК диапазон посредством контроллера 612 фокусирующей линзы. Одной ключевой функцией микроконтроллера является компенсация дефокуса устройства 505 компенсации дефокуса посредством контроллера 614 компенсации дефокуса. Другие дополнительные функции микроконтроллера включают изменение аккомодации глаза пациента посредством управления элементом 546 изменения аккомодации контроллером 616 внутренней фиксации и изменение размера апертуры выборки парциальных волновых фронтов устройством 518 переменной апертуры посредством контроллера 618 переменной апертуры. Функцию подсистемы электронного управления и обнаружения может выполнять специализированный микропроцессор, или компьютер, или другое электронное средство обработки данных и, таким образом, система 532 электронного управления и обнаружения, показанная на фигуре 5, должна рассматриваться только как опциональный компонент, а не как абсолютно необходимая часть устройства.
Модуль 592 отображения, показанный на фигуре 5, включен потому, что на него может смотреть рефракционный хирург непосредственно во время процедуры коррекции зрения, сверяясь с ним в выборе желаемой компенсации дефокуса и оптимизации результата коррекции зрения. Следует, однако, отметить, что модуль 592 отображения на фигуре 5 нужно понимать в широком смысле как средство обратной связи в реальном времени. В самом деле, при хирургической процедуре коррекции зрения под операционным микроскопом подход к осуществлению отображения измерений волнового фронта в реальном времени заключается в установке микродисплея внутри операционного микроскопа, так чтобы результат измерения волнового фронта можно было накладывать на изображение глаза пациента, формируемое операционным микроскопом, и непосредственно показывать рефракционному хирургу. В таком случае хирургу не требуется отворачивать голову от бинокуляра операционного микроскопа.
Фигура 7 иллюстрирует операционный микроскоп 710 с полупрозрачным микродисплеем 720, расположенном в сопряженной плоскости объекта в пути формирования изображения. Этот микродисплей используется для отображения выходных данных детерминированной динамической системы детектирования волнового фронта с фигуры 5, так что хирург может реагировать на полученную информацию, не отводя взгляда от окуляра микроскопа. Следует отметить, что, если микродисплей не является полупрозрачным, в пути формирования изображения можно установить элемент направления пучка, позволяющий проецировать изображение с микродисплея на сетчатку глаза хирурга. Дисплей может также представлять собой небольшой ЖК монитор, установленный непосредственно на операционный микроскоп.
С другой стороны, если вид с операционного микроскопа уже показывается на большом экране вдали от операционного микроскопа и хирург оперирует пациента, согласуясь с показываемом на большом экране изображением с микроскопа, тогда результат измерения волнового фронта в реальном времени должен предпочтительно выводиться на тот же большой экран, что и наложенное изображение, или отдельно на другое окно дисплея.
Информация об измерении волнового фронта с компенсацией дефокуса в реальном времени может также быть представлена в другом формате данных. Одним примером является использование встроенного алгоритма, который автоматически корректирует или сканирует дефокус и в то же время информирует рефракционного хирурга о том, что ему/ей следует продолжать процедуру коррекции зрения определенным образом.
Фигура 8 показывает примерную блок-схему такого встроенного алгоритма, в котором дефокус сканируется для определения наилучших положений компенсации дефокуса, способных выявить оставшиеся аберрации. Затем выбирается заданное значение или положение компенсации дефокуса, и рефракционный хирург получает сведения о том, как ему/ей продолжать процедуру коррекции зрения.
В блоке 800 обработки запускается алгоритм обработки обратной связи волнового фронта в реальном времени. Например, пользователь может выбрать алгоритм обратной связи в реальном времени из меню алгоритмов, показываемого на дисплее главного компьютера.
В блоке 802 обработки компенсация дефокуса перемещается в следующее положение и в блоке 804 обработки измеряются отклики от квадрантов детектора пятна изображения.
В блоке 806 обработки на основе отклика от каждого квадранта позиционного детектора вычисляются декартовы координаты. Затем определяются, например, наклоны волнового фронта, положения центроида, большая и малая оси, величины сферической, цилиндрической, коматической и трилистниковой аберраций выбранного волнового фронта. Также отображается след центроида. Вычисления могут осуществляться многократно для одного и того же положения компенсации дефокуса, например до тех пор, пока усреднением не будет достигнуто желаемое отношение сигнал/шум, и, другими словами, то же кольцо может быть выбрано многократно и усреднения могут проводиться до получения желаемого отношения сигнал/шум. Кроме того, для охвата всего волнового фронта может быть выбрано множество концентрических колец. Кроме того, количество парциальных волновых фронтов, которые нужно выбрать по кольцу, можно также менять, многократно включая источник света в импульсном режиме синхронно со сканированием сканирующего зеркала.
В блоке 810 обработки определяется, собрано ли требуемое количество точек данных компенсации дефокуса. Если требуемое или желаемое количество точек данных не достигнуто, обработка возвращается на блок 802 обработки, дефокус смещается на следующую позицию. Для определения того, достигнуто или нет желаемое или требуемое количество точек данных, в качестве критерия можно использовать результат измерения датчиком волнового фронта. Если измерение волнового фронта показывает, что наклон выбранного парциального волнового фронта еще попадает в динамический диапазон датчика волнового фронта, компенсация дефокуса может продолжаться. Если, напротив, результат измерения датчиком волнового фронта показывает, что один или более измеренный локальный наклон парциального волнового фронта уже выходит или вышел за пределы динамического диапазона, это будет означать, что уже достигнут один край компенсации дефокуса. Тот же критерий можно использовать для определения другого края дефокуса, пока все точки данных между двумя крайними точками не будут собраны.
Если ответ на вопрос, достигнуто ли требуемое или желаемое количество точек данных волнового фронта, положительный, тогда обработка передается блоку 812 обработки, в котором из эллипсов, полученных сканированием компенсации, определяется наилучшее значение (значения) компенсации, способные выявить оставшиеся аберрации. Этот этап подробно описан ниже со ссылкой на фигуру 13. Механизм дефокуса смещается на одно из значений «наилучшей компенсации», и результирующий центроид точек данных выводится на дисплей. Рефракционному хирургу передается информация о том, как лучше продолжить процедуру коррекции зрения.
Например, информация о том, в каком направлении переместить ИОЛ для надлежащего выравнивания, или в каком направлении повернуть торическую линзу для коррекции астигматизма, может быть представлена на дисплее в графическом или текстовом виде.
Эта информация не обязательно должна отображаться визуально, поскольку той же цели могут также служить другие формы обратной связи, такие как звуковая инструкция. В другом примерном варианте осуществления модуль визуального отображения можно заменить общим механизмом обратной связи, который может быть внедрен в систему 532 электронного управления и обнаружения. Можно также объединить визуальное отображение и звуковую инструкцию для сопровождения хирурга во время совершения процедуры коррекции зрения.
Алгоритм обратной связи датчика волнового фронта реального времени может выполняться автоматически микроконтроллером, исполняющим программы, хранящиеся во встроенной памяти. Альтернативно, программный код может храниться в главном компьютере и использоваться для управления различными модулями управления, либо может использоваться некоторая комбинация управления с главного компьютера и встроенных программ.
Во время процедуры коррекции зрения целью является улучшение зрения пациента до состояния эмметропии. Для ее достижения необходимо скорректировать аберрации высших и низших порядков, такие как сферическая, цилиндрическая, коматическая и трилистник. Традиционно коррекция проводится при статическом измерении, результатом которого является число, обычно в диоптриях, указывающее на степень оптической аномалии рефракции и требуемой коррекции или обнуления. Данная коррекция применяется, и затем следует новое статическое измерение для определения эффективности воздействия или коррекции.
С помощью описанного здесь устройства измерения волнового фронта в реальном времени можно не только отображать диоптрии оптических аберраций в реальном времени, но также обеспечить звуковой сигнал в реальном времени для указания типа аномалии, величины аномалии и изменения аномалии. Звуковая обратная связь может состоять, например, из высоты, тона и громкости, которые могут изменяться отдельно или совместно. Звук обратной связи может меняться с высокого на низкий, как только применяемая коррекция улучшает аномалию; напротив, если применяемая коррекция ухудшает или изменяет аномалию на противоположную, звук обратной связи может меняться с низкого на высокий. В случае, если пользователь плохо слышит, может, например, меняться повышение или понижение звука.
Вариант осуществления звуковой обратной связи для коррекции цилиндрической аномалии может состоять из конкретной высоты, указывающей на то, что аномалия является цилиндрической, при этом тон укажет величину аномалии. Как только коррекция выполнена, в данном примере, как только повернута торическая ИОЛ, высота повысится или понизится (уменьшится или увеличится частота), в зависимости от того, приближается ли коррекция к состоянию эмметропии (обнуление существующей цилиндрической аномалии с помощью ИОЛ) или удаляется от него. Как только желаемая коррекция достигнута, для подтверждения может быть подан звук другой высоты и/или тона, или пользователь услышит изменение звука с восходящего на нисходящий.
Такую звуковую обратную связь можно использовать в любых процедурах коррекции зрения, как в интраоперационных, так и в корригирующих очках и т.д. Имея такую звуковую обратную связь, клиницистам не придется отворачивать голову или отводить глаза от процедуры коррекции или операции, таким образом снизится вероятность ошибок. Такую звуковую обратную связь можно использовать всегда, когда волновой фронт используется для определения, измерения и/или коррекции аберраций волнового фронта.
Традиционные датчики волнового фронта для определения параметров волнового фронта человеческого глаза обычно делают снимок или несколько снимков волнового фронта глаза пациента при приглушенном или выключенном комнатном освещении. Такие датчики волнового фронта не могут показывать результаты непрерывного измерения волнового фронта в реальном времени для обратной связи в реальном времени, особенно если они предназначены для установки в офтальмологический операционный микроскоп, при включенном освещении и/или комнатном освещении. В процедурах коррекции зрения клиницисты/хирурги, выполняющие коррекцию, могут предпочтительно использовать отображение результатов измерений волнового фронта в реальном времени и, следовательно, обратную связь, во время проведения процедуры коррекции зрения. Кроме того, большинство хирургов могут также предпочтительно пользоваться тем, что данные волнового фронта, отображаемые в реальном времени, синхронизированы и наложены на видеоизображение/видеофильм в реальном времени глаза, из которого исходит волновой фронт, и при этом показаны наложенные данные волнового фронта количественным, качественным или комбинированным количественным/качественным способом.
Кроме того, для более эффективного осуществления процедур коррекции зрения хирургам требуется не только видеть данные волнового фронта в реальном времени на видео, но и, например, перематывать/воспроизводить заново отдельные фрагменты, чтобы пересмотреть этап операции и определить, как продолжать коррекцию, или ставить на паузу, чтобы обратиться к определенному моменту времени. До сих пор эти вопросы не были рассмотрены должным образом.
Далее описываются устройство/система и способ реализации измерения и отображения волнового фронта в реальном времени, а также отображение/запись/воспроизведение в реальном времени данных волнового фронта, синхронизированных с видеоизображением/видеофильмом глаза в реальном времени.
Согласно одному или более примерным вариантам осуществления, описываются устройство/система и способ обеспечения обратной связи с процедурой коррекции зрения. Устройство характеризуется датчиком волнового фронта реального времени, видеокамерой реального времени и компьютером, имеющим цифровое видеозаписывающее устройство и дисплей, связанный с компьютером. Способ характеризуется сбором данных волнового фронта от глаза датчиком волнового фронта реального времени, получением/записью видеофильма глаза видеокамерой, обработкой измеренных данных волнового фронта от глаза компьютером для получения в реальном времени наиболее желаемой информации для наложения информации о волновом фронте на записанный видеофильм глаза, и отображением как информации о волновом фронте, так и видеоизображения глаза на мониторе или нескольких мониторах, связанных с компьютером.
Одним признаком одного примерного варианта осуществления является то, что информация о волновом фронте в реальном времени и видеофильм глаза в реальном времени, полученные датчиком волнового фронта и видеокамерой глаза одновременно, но по очереди, снимается и/или записывается синхронно поточным способом. Другим признаком одного примерного варианта осуществления является то, что собранная информация обрабатывается в реальном времени и преобразуется в желаемый формат или для отображения в реальном времени, или для воспроизведения на одном и том же мониторе (мониторах). Еще одним признаком данного примерного варианта осуществления является то, что информацию, которую нужно показать на мониторе, может выбирать конечный пользователь по своему усмотрению.
Фигура 9A показывает схематическую диаграмму примерного варианта осуществления устройства/системы, содержащего/содержащей датчик 90102 волнового фронта реального времени, видеокамеру 90104 реального времени, компьютер 90106, связанный с датчиком 90102 волнового фронта и с видеокамерой 90104, дисплей/монитор 90108, связанный с компьютером 90106 и с делителем 90110 пучка.
Фигура 9B показывает примерный вариант осуществления способа с исполняемыми этапами. Датчик волнового фронта реального времени и видеокамера реального времени одновременно получают соответствующие им данные и передают данные компьютеру. Делитель пучка используется для направления части света от глаза к видеокамере и другой части света от глаза к датчику волнового фронта. Делитель пучка и видеокамера могут быть помещены внутрь модуля датчика волнового фронта. Компьютер обрабатывает данные в реальном времени и преобразует данные в желаемый формат для отображения.
В примерном варианте осуществления видеокамера и датчик волнового фронта связаны с компьютером и взаимодействуют посредством стандартных готовых программ-компиляторов, компоновщиков пользовательского интерфейса, сервисов и драйверов, таких как, например, Microsoft Visual Studio Professional и программный интерфейс Microsoft DirectShow, являющихся архитектурой потока данных для Microsoft Windows, так что программное обеспечение принимает непрерывный поток данных от оборудования как видеокамеры, так и датчика волнового фронта.
Измерения волнового фронта могут проводиться по кадрам, так же, как видеокамера захватывает признаки видимой картины (например, цвет, яркость, движение и т.д.) по кадрам в реальном времени, и синхронизироваться с видеофильмом глаза.
Поток данных волнового фронта представляет собой значения измерений волнового фронта в реальном времени, и поток данных камеры представляет собой кадры камеры в реальном времени (то есть "фильм"). Значения измерений волнового фронта в реальном времени принимаются асинхронно относительно кадров камеры в реальном времени. Программное обеспечение преобразует поток волнового фронта в компьютерную графику, синхронизированную и совмещенную с кадрами камеры и отображаемую на дисплее компьютера в виде комбинированного «фильма», синхронизированного с действиями хирурга в реальном времени.
В одном примерном варианте осуществления значения измерений датчика волнового фронта преобразуются в компьютерное изображение в форме кругов или эллипсов, являющихся типичными представлениями сферической и цилиндрической аномалий рефракции, хорошо понятных специалистам-практикам по коррекции зрения. Это компьютерное изображение накладывается на изображение биологического глаза, как показано на фигуре. 9C. Этот комбинированный "фильм" записывается в память, так что хирург может при желании пересматривать (например, повторно воспроизводить) этот фильм во время и/или после операции.
Компьютер связан с монитором, способным отображать результат измерений волнового фронта и видеоизображение биологического глаза одновременно. Монитор может быть частью компьютера (как, например, в случае лэптопа), или отдельным монитором, или несколькими мониторами, связанными друг с другом.
Характеристики волнового фронта могут показать имеющуюся в оптической системе глаза оптическую аномалию, так что клиницист может скорректировать эту ошибку (ошибки) в реальном времени во время операции или обследования глаза. Если бы данное изобретение не обладало возможностью работы в реальном времени, клиницист смог бы только сделать снимок (одиночный статический кадр) этих характеристик, что значительно замедляет каждую регулировку коррекции и позволяет отслеживаемым величинам между снимками меняться до известной степени (например, движению глаз пациента, накоплению слез и т.д.)
Дополнительно к такому преимуществу отображения в реальном времени, данный примерный вариант осуществления обеспечивает такие возможности цифрового видеозаписывающего устройства, как пересмотр (повторное воспроизведение) параметров в виде фильма во время и/или после операции или обследования. Эта возможность позволяет исследовать значения характеристик с течением времени, для коррекции во время или после операции и в целях тренировки для улучшения хирургических техник или для обучения студентов-медиков.
Следует отметить, что видеокамера может быть монохромной/черно-белой камерой или цветной камерой. Спектральная чувствительность видеокамеры может охватывать как видимый, так и инфракрасный диапазон. Камера может иметь функцию увеличения или уменьшения масштаба, так что хирург или клиницист могут выбирать цифровое увеличение показываемого видеоизображения. Показываемое изображение глаза можно также переворачивать или поворачивать, чтобы ориентировать его по взгляду хирурга. В примерном варианте осуществления для формирования изображения, показанного на фигуре 9C, использовалась USB-камера, модель UI-2230SE-M производства IDS.
Дисплей может являться встроенным дисплеем поднятой головы или микродисплеем в оптическом пути операционного микроскопа. Результат измерения волнового фронта и видеоизображение глаза можно воспроизводить по запросу, то есть ставить на паузу во время операции или воспроизводить после нее. Видеоизображение глаза можно использовать для обеспечения возможности идентификации любой отдельной отметки (отметок), сделанной вручную, или естественного ориентира (ориентиров) для выравнивания интраокулярной линзы (ИОЛ), и результат измерения в реальном времени датчиком волнового фронта можно использовать для сравнения оптического выравнивания, или визуального выравнивания, с физическим выравниванием. Кроме того, видео и/или данные волнового фронта можно использовать в помощь клиницисту для определения ключевых событий во время процедуры, таких как выравнивание по отношению к глазу, отслеживание движений глаза, закрыто ли веко глаза, рекомендуется ли промывание или множества других параметров.
Оптический волновой фронт сканируется/выбирается в реальном времени и оцифровывается. Эти цифровые выборки затем анализируются для получения параметров, таких как аберрации/искажения волнового фронта. Эти параметры (метрики) используются для вычисления оптических аномалий рефракции, обычно представляемых в виде карты волнового фронта и/или единиц аномалий волнового фронта различных порядков в диоптриях. Параметры отображаются и/или сохраняются в реальном времени в файлах на стационарном устройстве хранения, в том числе и для поддержания возможности цифровой видеозаписи (DVR). Параметры синхронизируются с записанным видеоизображением глаза (цели исследования). Посредством работы пользователя элементами управления цифровым устройством видеозаписи (DVR) (например, сканирование, воспроизведение, перемотка и т.д.), предыдущие параметры исследуются и могут использоваться в качестве обратной связи в данной/будущих процедурах коррекции зрения.
Фигура 9C представляет собой скриншот, изображающий компьютерное изображение, полученное датчиком волнового фронта, наложенное на кадры видео биологического глаза. На фигуре 9C компьютерное изображение эллипса 90302, преобразованное из потока данных волнового фронта, накладывается на выходное изображение биологического глаза, полученное видеокамерой. Как описано в заявке на патент США 12/609219 под названием «Optimizing Vision Correction Procedures» («Оптимизация процедур коррекции зрения»), датчик волнового фронта измеряет локальный наклон выбранного парциального волнового фронта, чтобы ясно показать преобладающий признак (признаки) компонентов аберрации волнового фронта, таким образом позволяя специалисту-практику по коррекции зрения или рефракционному хирургу точно регулировать процедуру коррекции зрения и минимизировать оставшуюся аберрацию (аберрации) волнового фронта в реальном времени.
Что касается выборки и отображения результата измерений волнового фронта в реальном времени, выборка по кольцу позволяет отображать локальный наклон выбранных парциальных волновых фронтов на мониторе в форме двумерной картины центроида точек данных, который может выстраиваться в круг, или эллипс, или прямую линию, таким образом прямо указывая на две главные аномалии рефракции, а именно сферическую и цилиндрическую аномалии рефракции, а также на ось цилиндра/астигматизм, или выстраиваться в кардиоиду в случае комы или других несимметричных форм высших порядков. В результате рефракционный хирург может легко понять результат измерения волнового фронта и в соответствии с ним точно отрегулировать коррекцию зрения.
Возвращаясь к фигуре 9C, метки 90304 достоверно указывают на то, что глаз выровнен и данные волнового фронта "правильные". Если нет совпадения с метками для надлежащего выравнивания глаза с датчиком волнового фронта, зеленые метки исчезают. Если датчик волнового фронта не выровнен, тогда измерения не являются точными и данные волнового фронта не оцениваются.
Рука 90306 является направляющим "ориентиром", который указывает клиницисту, в каком направлении переместить пациента/микроскоп для лучшего выравнивания.
Нижние числа на фигуре 9C показывают измеренную рефракцию в виде рецепта и положительный цилиндр. Клиницист может выборочно менять рефракцию на Rx и положительный цилиндр на отрицательный цилиндр. Отметки на границе видео показывают ориентацию пациента относительно микроскопа/клинициста и могут быть повернуты/изменены.
Клиницист может дополнительно настраивать дисплей, чтобы он показывал рецепт линзы и/или аномалии рефракции глаза и/или указатели конечной цели, такой как эмметропия. Компьютер может также обрабатывать данные датчика волнового фронта для получения дополнительной информации о состоянии глаза, такой как покрытие слезной пленкой или сухое состояние, и напомнить хирургу промыть глаз. Дисплей может также предоставлять другую информацию, которую компьютер может извлечь из данных волнового фронта и видеоизображения глаза, такую как двумерная топографическая карта волнового фронта глаза.
Дополнительно клиницист может менять конфигурацию дисплея, ориентируя дисплей, камеру или, посредством программного обеспечения, видео в предпочитаемое положение. Клиницист может также выбирать форму представления качественных и/или количественных данных. Это может быть значения диоптрий, или рефракция, или рецепт; качественный дисплей можно выбрать для отображения эллипса и/или круга, представляющих сферу и/или цилиндр; линия, пересекающая эллипс, может представлять ось астигматизма, или клиницист может выбрать, показывать/отображать ли данные рефракции в виде двумерной топографической карты.
Дисплей, показанный на фигуре 9C, дает хирургу много преимуществ при проведении офтальмологических процедур. Среди них возможность знать, достаточно ли хорошо выровнен глаз относительно датчика волнового фронта (с помощью направляющего круга 90304, нарисованного на экране, хирург может располагать глаз пациента так, чтобы он совпадал с центром нарисованного круга), обеспечение доверительного индикатора, чтобы хирург знал, что результат волнового фронта "правильный", дать хирургу возможность видеть влияние хирургического инструмента (инструментов), попадающих в путь света и интерферирующих с желаемым результатом волнового фронта, возможность видеть влияние воды, промывающей глаз, способность направлять хирурга при повороте имплантированной торической интраокулярной линзы (ИОЛ) для коррекции астигматизма, показывать в явном виде результат измерения волнового фронта в единицах диоптрий сферы и цилиндра, когда коррекция выполнена как качественно, так и количественно, позволить хирургу видеть, есть ли пузырьки воздуха или остались ли еще в полости глаза обломки или обрывки материала линзы, способные повлиять на результат измерения волнового фронта, и т.д.
Дополнительно к процедурам коррекции зрения, примерные варианты осуществления можно также использовать при изготовлении линз, отслеживании турбулентности воздуха и коррекции волнового фронта, а также в других устройствах и системах адаптивной оптики. Кроме того, настоящие вариант осуществления можно использовать в других устройствах, таких как ОКТ, фемтосекундные лазеры, ЛАСИК; или приборах, основанных на эффекте Доплера/радарах/резонансе, или в других устройствах, дающих информацию, не видимую человеческому глазу, которая может быть измерена физическими приборами/человеком.
В US 7445335 упоминалось, что при выборке волнового фронта по кольцу и отображении двумерной картины точек данных, в которой положение каждой точки данных определяет локальный наклон положением центроида выбранного парциального волнового фронта, двумерная картина точек данных в виде центроида может прямо указывать в реальном времени, является ли волновой фронт плоским, как далеко находится дефокус, является ли дефокус расходящимся или сходящимся, какова степень астигматизма и где расположена ось астигматизма.
Для иллюстрации этих пунктов будет кратко повторено то, что обсуждалось в публикации US7445335. Предположим, что для анализа волнового фронта используется последовательный датчик 928 волнового фронта, и квадрантный детектор 922 с четырьмя фоточувствительными зонами A, B, C и D используется для определения локального наклона посредством положения центроида пятна изображения анализируемого парциального волнового фронта, как показано на фигуре 9. Если парциальный волновой фронт падает по нормали на фокусирующую линзу 920 парциального волнового фронта перед квадрантным детектором 922, пятно 934 изображения на квадрантном детекторе 922 будет расположено по центру, и четыре фоточувствительные зоны примут одинаковое количество света, причем мощность сигнала от каждой зоны будет одинакова. С другой стороны, если парциальный волновой фронт отклоняется от нормали на угол наклона (другими словами, смещается вправо и вверх), пятно изображения на квадрантном детекторе сместится от центра (переместится по направлению к правому верхнему квадранту, что показывает пятно 936 изображения).
Отклонение (x, y) центроида от центра (x=0, y=0) можно приблизить первым порядком, используя следующие уравнения (1):
где A, B, C и D обозначают мощность сигнала от каждой соответствующей фоточувствительной зоны квадрантного детектора, и знаменатель (A+B+C+D) используется для нормализации измерения, чтобы устранить вклад флуктуаций интенсивности оптического источника. Следует отметить, что уравнения (1) не являются абсолютно точными в вычислении локального наклона в единицах положения центроида, но это хорошее приближение. На практике может потребоваться дополнительная коррекция ошибок положения пятна изображения, что может быть сделано уравнением с некоторыми вычислениями и встроенным алгоритмом.
Когда несколько симметричных парциальных волновых фронтов (например, 4, 8 или 16) по кольцу оптического пучка будут последовательно собраны и затем спроецированы (например, в направлении по часовой стрелке) на фокусирующую линзу 920 парциального волнового фронта и квадрантный детектор 922, отклонение центроида, обозначаемое (x, y) в уравнении (1), от центра квадрантного детектора покажет картину x-y координат, которую можно отобразить на мониторе и также обработать цифровым способом, чтобы показать положение дефокуса и астигматизма, а также асимметрию.
Фигура 10 показывает несколько репрезентативных случаев плоского волнового фронта, дефокуса и астигматизма, соответствующее положение пятна изображения на квадрантном детекторе позади фокусирующей линзы парциального волнового фронта, а также последовательное перемещение соответствующих положений центроида при отображении на мониторе в виде двумерной картины точек данных. Следует отметить, что вместо изображения нескольких смещенных волновых фронтов, собранных и спроецированных в качестве парциальных волновых фронтов на одну и ту же фокусирующую линзу парциального волнового фронта и на квадрантный детектор, было взято такое эквивалентное представление, при котором несколько парциальных волновых фронтов выстроены по тому же кольцу, и, соответственно, несколько квадрантных детекторов выстроены по тому же кольцу, чтобы показать случай сканирования различных участков волнового фронта на единственную фокусирующую линзу парциального волнового фронта и единственный квадрантный детектор.
Предположим, что сканирование по кольцу волнового фронта начинается с верхнего парциального волнового фронта и перемещается по часовой стрелке ко второму парциальному волновому фронту справа, и так далее, как показано стрелкой 1009. На фигуре 10 можно видеть, что, когда волновой фронта представляет собой плоскую волну 1001, все парциальные волновые фронты (например, 1002) сформируют пятно 1003 изображения в центре квадрантного детектора 1004, и в результате след 1005 центроида на мониторе 1006 будет также всегда находиться в начале координат.
Когда входящий волновой фронт является расходящимся, как волновой фронт 1011, центр пятна 1013 изображения каждого парциального волнового фронта 1012 окажется на радиально внешней стороне от центра волнового фронта с такой же величиной отклонения от центра квадрантного детектора 1014, и в результате след 1015 на мониторе 1016 будет представлять собой круг по часовой стрелке, что показывает стрелка 1018, начинающийся из верхнего положения 1017. Если, с другой стороны, входящий волновой фронт является расходящимся, как волновой фронт 1021, центр пятна 1023 изображения каждого парциального волнового фронта 1022 окажется на радиально внутренней стороне относительно центра волнового фронта с такой же величиной отклонения от центра квадрантного детектора 1024. В результате след 1025 центроида на мониторе 1026 все еще будет кругом, но начнется из нижнего положения 1027, и все еще будет иметь направление по часовой стрелке, что показывает стрелка 1028. Поэтому когда обнаруживается изменение знака для положения центроида как по оси Х, так и по оси Y, это указывает на то, что входящий волновой фронт меняется с расходящегося пучка на сходящийся, или наоборот. Кроме того, начальная точка следа центроида может также использоваться в качестве критерия, указывающего на то, является ли входящий волновой фронт расходящимся или сходящимся.
Из фигуры 10 также можно видеть, что, когда входящий волновой фронт является астигматическим, может оказаться, что волновой фронт будет расходящимся в вертикальном направлении, как показывает 1031а, и расходящимся в горизонтальном направлении, как показывает 1031b. В результате центроид вертикальных парциальных волновых фронтов 1033a будет расположен радиально снаружи относительно центра входящего волнового фронта, и центроид горизонтальных парциальных волновых фронтов 1033b будет расположен радиально внутри относительно центра входящего волнового фронта. Следовательно, след 1035 центроида на мониторе 1036 начнется из верхнего положения 1037, но будет двигаться против часовой стрелки, что показывает стрелка 1038, поэтому теперь направление вращения центроида противоположное.
Рассуждая так же, нетрудно понять, что, если входящий волновой фронт астигматический, но все парциальные волновые фронты или полностью расходящиеся, или полностью сходящиеся, след центроида будет поворачиваться по часовой стрелке (т.е. не в противоположном направлении), однако, в случае астигматизма, след центроида на мониторе будет эллиптическим, а не круглым, потому что парциальные волновые фронты вдоль одной астигматической оси будут более расходящимися или более сходящимися, чем вдоль другой оси.
В более общем случае астигматического волнового фронта, либо след центроида будет поворачиваться в противоположном направлении, будучи эллиптическим или круглым, либо след центроида будет поворачиваться в нормальном направлении вращения по часовой стрелке, но след будет эллиптическим. Ось эллипса может иметь любое радиальное направление относительно центра, что укажет на ось астигматизма. В таком случае, четырех парциальных волновых фронтов по кольцу может оказаться недостаточно для точного определения оси астигматизма и потребуется выбрать по кольцу больше парциальных волновых фронтов (например, 8, 16 или 32 вместо 4).
Как упоминалось в разделе «сущность изобретения», одним новым признаком вариантов осуществления является способ сбора (выборки) волнового фронта и отображения результатов измерений волнового фронта. Хотя в US7445335 упоминалось, что осуществляя выборку данных нескольких волновых фронтов по кольцу волнового фронта от глаза пациента, можно определить сферические и цилиндрические аномалии рефракции (или дефокус и астигматизм) глаза, там не было подробного объяснения эффекта активной компенсации дефокуса на двумерной картине точек данных. Если глаз имеет сравнительно большую сферическую аномалию рефракции и сравнительно малый астигматизм, двумерная картина центроида точек данных будет больше похожа на круг, эллиптичность которого будет едва заметна, затрудняя обнаружение оси астигматизма, а также степень астигматизма. С другой стороны, если дефокус исходного волнового фронта имеет надлежащую компенсацию, оставшийся астигматизм ясно проявится на двумерной картине точек данных, явно показывая ось и степень астигматической аномалии.
Фигура 11 показывает меридиональные сечения волнового фронта с различными компенсациями дефокуса и соответствующими изменениями двумерной картины точек данных в случае эмметропического глаза или глаза с только сферической аномалией рефракции. На фигуре 11a верхний ряд изображений 1112-1116 волнового фронта показывает кривизну волнового фронта для конкретной компенсации дефокуса и часть детектора, до которой пятно изображения парциального волнового фронта фокусируется линзой. Средний ряд изображений показывает кольцо детекторов, ориентированных для регистрации сфокусированного пятна изображения парциальных волновых фронтов кольцевого участка волнового фронта и смещение центроидов волнового фронта от центра (x=0, y=0) детекторов. Нижний ряд показывает отклонение каждого центроида на каждом квадранте детектора относительно начала координат, соответствующего (x=0, y=0). Буквенные отметки на отображаемых на дисплее точках данных соответствуют отметкам детекторов в кольце детекторов.
На фигуре 11 изображение волнового фронта, изображение детектора и изображение дисплея для отдельного смещения дефокуса расположены вертикально. Например, для компенсации 1112 дефокуса детекторы и пятна изображения показаны позицией 1132 и дисплей показан позицией 1122.
Можно видеть, что, когда настраивается компенсация дефокуса (слева направо), результирующий волновой фронт меняется со сферически более расходящегося волнового фронта 1112 на сферически менее расходящийся волновой фронт 1113, на плоский волновой фронт 1114, на сферически менее сходящийся волновой фронт 1115 и на сферически более сходящийся волновой фронт 1116. Соответственно, положение пятна изображения на квадрантном детекторе также изменится, как показано на фигуре 11, с радиально более внешнего 1132 на радиально менее внешний 1133, на находящийся в центре 1134, на радиально менее внутренний 1135, на радиально более внутренний 1136. Соответственно, двумерная картина данных также изменится с большего круга 1122 с точкой данных "a" в первом квадранте на меньший круг 1123 с точкой данных "a" все еще в первом квадранте, на совмещение точек 1124 данных в центре, на меньший круг 1125 с точкой данных "a" теперь в третьем квадранте, и затем на больший круг 1126 с точкой данных "a" все еще в третьем квадранте.
Один признак, связанный с последовательным выбором парциальных волновых фронтов по кольцу, состоит в том, что, независимо от того, является ли результирующий волновой фронт сферически расходящимся или сходящимся, отображаемая последовательность двумерных точек данных будет иметь определенное направление поворота (что показывает последовательность a, b, c, d на фигуре 11). Однако точки данных будут расположены на противоположной стороне кругового следа центроида, если есть изменение дивергенции или конвергенции сферического волнового фронта. Таким образом, положение точек данных относительно центра круга может показать, является ли волновой фронт расходящимся или сходящимся.
В качестве одного объекта одного варианта осуществления может быть проведено калибровочное измерение по существу плоского волнового фронта, чтобы определить отношение между диаметром следа центроида, диаметром и/или шириной кольца и компенсацией дефокуса. Затем измерение волнового фронта от глаза может быть осуществлено сканированием компенсации дефокуса, а также, возможно, размера кольца, то есть его диаметра и ширины, и соотнесением результатов измерений с калибровочными данными. Поступая так, можно получить более точное измерение сферической аномалии рефракции глаза.
Дополнительно, фигура 11 фактически показывает также феномен, который может использоваться для выравнивания. Следует отметить, что центр двумерной картины точек данных, или круга следа центроида, на самом деле перемещается при сканировании элемента компенсации дефокуса. Это может происходить из-за неверного выравнивания оптической оси между датчиком волнового фронта и элементом компенсации дефокуса, или из-за латерального или поперечного движения глаза при настройке или сканировании элемента компенсации дефокуса. Таким образом, в качестве одного объекта одного варианта осуществления данный феномен может использоваться для выравнивания устройства компенсации дефокуса с датчиком волнового фронта. В качестве другого объекта одного варианта осуществления датчик волнового фронта реального времени с элементом активной компенсации дефокуса может использоваться для обозначения выравнивания глаза относительно описываемого здесь устройства.
Дополнительно устройство может также использоваться с отображением двумерной картины точек данных в реальном времени для сопровождения конечного пользователя при выравнивании глаза пациента с помощью устройства. Кроме того, оно может также использоваться для отслеживания глаза. Компенсация дефокуса может быть надлежащим образом выбрана так, чтобы получить желаемую двумерную картину точек данных с подходящим размером, и встроенный алгоритм может использоваться для извлечения данных о центральном положении двумерной картины точек данных и для управления механическим механизмом для перемещения устройства относительно глаза пациента, используя петлю обратной связи, так что глаз всегда выравнивается устройством. Другим объектом введения такой обратной связи для выравнивания является введение алгоритма коррекции в реальном времени, который обновляет данные относительно коррекции измеренных смещенных координат и активно отображает данные о правильном выравнивании.
Следует отметить, что, хотя на фигурах 9, 10 и 11 начало декартовых координат используется в качестве опорной точки, это только один частный случай. На самом деле, если квадрантный детектор не выровнен по оптической оси фокусирующей линзы парциального волнового фронта, пятно изображения плоского парциального волнового фронта не будет поделено поровну между четырьмя квадрантами. Если в этом случае полный волновой фронт является плоским, все измеряемые парциальные волновые фронты будут также плоскими, и поэтому положение центроида точек данных будет таким же. Другими словами, когда полный волновой фронт является плоским, двумерный центроид точек данных займет то же положение, не обязательно в начале декартовых координат. Таким образом, практический подход к выравниванию глаза пациента или устройства компенсации дефокуса относительно датчика волнового фронта состоит в использовании опорного плоского волнового фронта для определения этой опорной точки в декартовых координатах и в использовании затем встроенного алгоритма, чтобы узнать, выровнен ли относительно опорной точки измеренный волновой фронт как от глаза пациента, так и после прохождения некоторого оптического элемента, такого как устройство компенсации дефокуса.
Фигура 12 показывает, в случае глаза с дефокусом и астигматизмом, вертикальное и горизонтальное сечения волновых фронтов с различными компенсациями дефокуса, соответствующие пятна изображения выбранного парциального волнового фронта на квадрантном детекторе и соответствующее изменение двумерной картины точек данных.
Фигура 12 устроена так же, как и фигура 11, кроме того, что теперь показаны вертикальное и горизонтальное сечения волнового фронта, потому что, в случае астигматизма, эти сечения будут иметь разную кривизну, что было описано выше со ссылкой на фигуру 4.
Как описано выше, ось астигматизма (Axis) представляет собой любое число от 0 до 180 градусов; это число оси сообщает, где есть отличие в кривизне роговицы, или как ориентирован, или выровнен, астигматизм. Как на фигуре 4, так и на фигуре 12 для ясности описания ось является или вертикальной, или горизонтальной линией. Однако, как известно из предыдущего уровня техники, при реальном измерении глаза ось может иметь другие значения.
Поскольку компенсация дефокуса настраивается, как показано на фигуре 12 (слева направо), волновой фронт 1212 в вертикальном сечении изначально более расходящийся, чем соответствующий волновой фронт в горизонтальном сечении. Соответственно, пятна изображения на квадрантном детекторе, как показано позицией 1242, будут радиально более смещены наружу для парциальных волновых фронтов, выбранных в верхнем и нижнем участках кольца (a и c), чем для выбранных в левом и правом участках кольца (d и b). В результате двумерная картина 1232 центроида точек данных будет эллипсом с главной осью, выровненной по существу вертикально.
При дальнейшей настройке компенсации дефокуса волновой фронт 1213 в вертикальном сечении становится менее расходящимся, в то время как соответствующий волновой фронт 1223 в горизонтальном сечении является плоским. Таким образом, пятна изображения на квадрантном детекторе, как показано позицией 1243, будут радиально меньше смещены наружу для парциальных волновых фронтов, выбранных в верхнем и нижнем участках кольца (a и c), тогда как пятна изображения парциальных волновых фронтов, выбранных в левом и правом участках кольца (d и b), попадут по существу близко к центру квадрантного детектора. В результате, двумерная картина 1233 центроида точек данных будет по существу похожа на вертикальную линию.
При дальнейшей настройке компенсации дефокуса волновой фронт 1214 в вертикальном сечении может стать даже менее расходящимся с углом дивергенции, равным углу конвергенции волнового фронта 1224 в горизонтальном сечении, прошедшего точку плоского волнового фронта и изменившегося с расходящегося на сходящийся. Соответственно, пятна изображения на квадрантном детекторе (a и c), что показывает позиция 1244, будут даже менее радиально внешними для парциальных волновых фронтов, выбранных в верхнем и нижнем участках кольца, тогда как пятна изображения парциальных волновых фронтов, выбранных в левом и правом участках кольца (b и d) будут теперь расположены до некоторой степени радиально внутри, причем внутреннее положение равно внешнему положению пятен изображения парциальных волновых фронтов, выбранных на верхнем и нижнем участках. В результате двумерная картина 1234 центроида точек данных будет похожа на круг с обратным направлением поворота, как обсуждалось выше.
При продолжении дальнейшей настройки компенсации дефокуса волновой фронт 1215 в вертикальном сечении теперь станет плоским, тогда как волновой фронт 1225 в горизонтальном сечении станет более сходящимся. Соответственно, пятна изображения на квадрантном детекторе, что показывает позиция 1245, окажутся ближе к центру для парциальных волновых фронтов, выбранных в верхнем и нижнем участках кольца (a и c), тогда как для парциальных волновых фронтов, выбранных в левом и правом участках кольца (b и d), пятна изображения будут расположены более радиально внутри. В результате двумерная картина 1235 центроида точек данных будет похожа на горизонтальную линию.
При продолжении дальнейшей настройки компенсации дефокуса волновой фронт 1216 в вертикальном сечении пройдет точку плоского волнового фронта и станет едва сходящимся, тогда как волновой фронт 1226 в горизонтальном сечении станет даже более сходящимся. Соответственно, пятна изображения на квадрантном детекторе, что показывает позиция 1246, будут расположены радиально немного внутри для парциальных волновых фронтов, выбранных в верхнем и нижнем участках кольца (a и c), тогда как для парциальных волновых фронтов, выбранных в левом и правом участках кольца (b и d), пятна изображения будут расположены даже более радиально внутри. В результате двумерная картина 1236 центроида точек данных будет похожа на горизонтальный эллипс.
Из фигуры 12 можно видеть, что, когда степень эллиптичности мала, будет труднее точно определить большую и малую ось эллипса и величину эллиптичности, соответствующие астигматической аномалии рефракции. Так же, как и в случае чистого дефокуса или сферической аномалии рефракции, порядок вращения двумерной картины точек данных, хотя и похожей теперь на эллипс, будет иметь определенное направление вращения, если парциальные волновые фронты собираются последовательно по кольцу. Опять же, каждая точка данных будет расположена на противоположной стороне относительно центра эллипса, если есть изменение полной дивергенции или конвергенции результирующего волнового фронта. Итак, если направление вращения следа центроида не противоположно, положение точек данных относительно центра эллипса может сообщить, является ли полный волновой фронт сходящимся или расходящимся. При этом форма эллипса, выраженная в ориентации большой и малой осей, длина большой и малой осей и отношение длин большой и малой осей, или эллиптичность, могут использоваться для определения градуса измеренного астигматизма.
Тем не менее, при настройке компенсации дефокуса для лучшей компенсации компонента дефокуса результирующий волновой фронт изменится так, что полная дивергенция или конвергенция будут уменьшаться, пока вдоль отдельного направления результирующего волнового фронта локальный наклон не станет равным нулю, то есть соответствующее сечение волнового фронта не станет плоским, что показывают позиции 1223 и 1215. Соответствующие им две прямые линии двумерных картин (1233 и 1235) центроида точек данных будут перпендикулярны друг другу, если нет аберраций высших порядков, кроме дефокуса и астигматизма. При дальнейшей настройке устройства компенсации дефокуса для еще лучшей компенсации компонента дефокуса результирующий волновой фронт будет иметь больший более расходящийся участок и меньший менее расходящийся участок, или наоборот. Двумерные картины точек данных для такого случая не показаны на фигуре 12, но их можно представить себе на основании выполняемого обсуждения. Одним признаком двумерной картины точек данных в настоящий момент является то, что порядок вращения следа центроида изменится, и картина точек данных будет похожа на меньший эллипс с более короткой большой осью. И снова форма последовательно отраженного эллипса, выраженная в ориентации большой и малой осей, длинах большой и малой осей и отношении длин большой и малой осей, или эллиптичности, может использоваться для определения градуса измеренного астигматизма.
Когда происходит по существу хорошая компенсация сферического компонента дефокуса, результирующий волновой фронт является поровну расходящимся для половины полного волнового фронта (1214) и поровну сходящимся для другой половины полного волнового фронта (1224). Последовательное направление поворота теперь круглой двумерной картины следа центроида точек данных теперь поменяется на противоположное по сравнению с двумя большими эллипсами 1232 и 1236.
Следует упомянуть, что, хотя существует различие в двумерной картины центроида точек данных при настройке или сканировании компенсации дефокуса в области «наилучшего фокуса» и форме сечения фокусируемого пучка при астигматизме, на самом деле между ними очень хорошее соответствие и сходство. Эта похожесть является существенным признаком настоящего изобретения, делающим представление результата измерения волнового фронта таким простым для понимания специалистов-практиков. Предположим, что пучок, испускаемый точечным источником вблизи центральной ямки, выходит из глаза, имеющего и близорукость, и астигматизм, и что пучок фокусируется справа налево, как показано в нижней части фигуры 12. Выходя из глаза, пучок сфокусируется скорее в вертикальном, чем в горизонтальном направлении. Из-за этого форма сечения пучка будет похожа на горизонтальный эллипс 1256.
Сейчас нужно вновь напомнить, что существует различие между геометрической лучевой оптикой, являющейся приближением, и более точной волновой оптикой в том смысле, что лучевая оптика, как показано на фигурах 2 и 4, предполагает, что пучок может быть сфокусирован до бесконечно малого размера, так что кривизна сферического волнового фронта не будет меняться, а это не так. На самом деле волновая оптика показывает, что при фокусировке сходящегося пучка волновой фронт будет постепенно меняться с расходящегося с относительно фиксированным радиусом кривизны, как и предсказывала лучевая оптика, на более сходящийся, на менее сходящийся, на плоский и затем на менее расходящийся, более расходящийся и, наконец, на менее расходящийся с относительно фиксированным радиусом кривизны, как предсказывала лучевая оптика. Соответственно, во время изменения радиус кривизны волнового фронта будет меняться с положительного большего, но более постоянного, чем предсказывала лучевая оптика, с меньшего на больший, на бесконечный, и на отрицательный больший, с меньшего на больший, но с относительно фиксированным радиусом кривизны, как предсказывала лучевая оптика. Следует отметить, что на фигуре 12 показан только случай для области вблизи "наилучшего фокуса", в которой приближения лучевой оптики уже не действуют.
Итак, если посмотреть на вертикальное сечение волнового фронта, при приближении к положению "наилучшего фокуса" он станет менее сходящимся скорее, чем горизонтальное сечение волнового фронта, которое все еще далеко от своего положения "наилучшего фокуса". Такой ситуации с волновым фронтом соответствуют позиции 1216 и 1226. Оказалось, что двумерная картина 1246 точек данных также является горизонтальным эллипсом, так что соответствие хорошее.
Когда астигматический пучок фокусируется больше, он превращается в горизонтальную линию 1255. Это означает, что в вертикальном направлении пучок сфокусирован наилучшим образом. Итак, волновой фронт (1215) в вертикальном сечении должен быть плоским, тогда как волновой фронт (1225) в горизонтальном сечении все еще сходящийся. Следует отметить, что двумерная картина 1235 центроида точек данных также представляет сбой горизонтальную линию, так что соответствие снова хорошее.
При дальнейшем распространении фокусируемого астигматического пучка он превращается в круг наименьшего рассеяния, и форма пучка становится кругом 1254. В этом месте волновой фронт в вертикальном сечении проходит точку плоского волнового фронта и становится немного расходящимся (1214), тогда как волновой фронт в горизонтальном сечении все еще немного сходящийся (1224), поскольку он не достиг положения "наилучшего фокуса". Соответственно, двумерная картина 1234 точек данных в виде круга оказывается последовательно измененной на обратную.
При дальнейшем движении фокусируемого астигматического пучка форма пучка становится вертикальной линией 1253. Следует отметить, что волновой фронт в вертикальном сечении становится более расходящимся (1213), тогда как пучок идеально фокусируется в горизонтальном направлении, что означает, что волновой фронт в горизонтальном сечении является плоским (1223). Соответственно, двумерная картина центроида точек данных представляет собой также вертикальную линию 1233.
При распространении еще дальше фокусируемого астигматического пучка форма пучка превращается в вертикальный эллипс (1252). В этом положении волновой фронт в вертикальном сечении становится еще более расходящимся (1212), тогда как волновой фронт в горизонтальном сечении становится только немного расходящимся (1222). Оказывается, что двумерная картина точек данных также представляет собой вертикальный эллипс (1232).
Объединяя приведенное выше обсуждение и обсуждения, сделанные для сферически сходящегося или расходящегося волнового фронта фокусируемого пучка и плоского волнового фронта пучка, можно видеть, что целью объединения двумерной картины точек данных также является хорошее соответствие фокусировке пучка в единственную точку. Итак, двумерная картина центроида точек данных, полученная при измерении волнового фронта выбором волновых фронтов пучка по кольцу, может интуитивно указать на состояние эмметропии и наличие сферической и цилиндрической аномалий рефракции способом, хорошо понятным специалистам-практикам по коррекции зрения. Поэтому следует понимать, что уникальный способ представления измерений волнового фронта в форме двумерной картины центроида точек данных, имеющей те же свойства, что и форма сфокусированного пучка, является ключевым признаком одного варианта осуществления настоящего изобретения.
В качестве одного объекта одного варианта осуществления может быть проведено калибровочное измерение волнового фронта для по существу плоского волнового фронта, чтобы определить отношение между параметрами следа центроида, диаметром и шириной кольца и компенсацией дефокуса. Затем может быть проведено реальное измерение волнового фронта от глаза сканированием компенсации дефокуса и также, возможно, размеров кольца, а именно его диаметра и ширины, и соотнесение результатов измерений с калибровочными данными. Поступая так, можно получить более точное измерение как сферической, так и цилиндрической аномалии рефракции глаза.
Следует отметить, что те же выравнивание глаза или оптического элемента и отслеживание глаза, обсуждавшиеся для случая сферической аномалии рефракции, могут также применяться к глазу, имеющему и сферическую, и цилиндрическую аномалии рефракции. В этом случае при сканировании устройства компенсации дефокуса центр эллипса (с прямой линией и последовательно противоположным кругом в качестве предельных случаев эллипса) можно сравнить с опорной точкой, и, если центр всегда попадает в заранее заданное расстояние до опорной точки, можно считать, что достигнуто хорошее выравнивание или отслеживание.
Следует отметить, что, если в глазу есть аберрации высших порядков, другие или дополнительные, помимо дефокуса и астигматизма, двумерная картина точек данных будет отличаться от эллипса (с кругом и прямой линией в качестве двух предельных случаев эллипса). В качестве одного объекта одного варианта осуществления такая неидеальная эллиптическая картина точек данных или следа центроида может быть либо отображена непосредственно, либо выстроена в эллипс и отклонения точек данных от построенного эллипса укажут специалисту-практику по коррекции зрения, что есть аберрации высших порядков. Степень асимметричного отклонения, или отличие от эллипса наилучшего соответствия, может использоваться для оценки наилучшего положения обнуленного фокуса при оптимальном измерении сферического обнуления. Такая форма отображения аберраций высших порядков будет, очевидно, более приемлема и понятна специалистам-практикам по коррекции зрения, чем двумерная карта волнового фронта или полиномиальные коэффициенты Цернике. Следует отметить, однако, что, когда на дисплее появляется асимметрия, этому есть много возможных причин. Например, это может произойти из-за неправильного выравнивания глаза относительно описанного ранее устройства. При таких обстоятельствах фактическая картина центроида, вызванная сферической аномалией рефракции, скорее всего не будет симметричной, и не следует добиваться симметрии выравниванием от оси фиксации, иначе данные об астигматизме будут неверны.
Наиболее интересным признаком двух компенсаций дефокуса, которые приводят к двумерной картине точек данных в виде двух прямых линий, является то, что линия может более ясно показать ось астигматизма. При этом длина прямых линий вместе с величиной дефокуса могут напрямую указать градус, или значение диоптрий, астигматизма. Хотя длина прямой линии зависит от диаметра или радиуса кольца, а также, до определенной степени, от размера апертуры выборки, но их можно определить и откалибровать заранее. В качестве одного объекта одного варианта осуществления можно сканировать устройство компенсации дефокуса для нахождения двух прямых линий двумерных картин точек данных, причем такое сканирование может быть инициировано специалистом-практиком по коррекции зрения, или рефракционным хирургом, или встроенным алгоритмом, и коррекция дефокуса может быть остановлена в одном из двух значений или положений, чтобы показать на дисплее прямую линию. Сканирование дефокуса позволит конечному пользователю достигнуть более точного определения оси и величины астигматизма. Сканирование дефокуса, также по возможности объединенное со сканированием кольца, может также служить цели усреднения шума и получения лучшего измерения аберрации глаза. Например, разброс между двумя значениями компенсации дефокуса, приводящей к двум прямым линиям в двумерной картине точек данных, может использоваться для получения информации об астигматизме глаза.
Две прямые линии двумерной картины точек данных в действительности показывают, что можно скорректировать аномалии рефракции, используя по меньшей мере две комбинации сферической и цилиндрической линз. Первая комбинация состоит в использовании значения компенсации дефокуса, которое привело к первой (вертикальной) прямой линии 1233, для выбора сферической линзы для коррекции сферической аномалии рефракции. Такая сферическая линза сделает волновой фронт 1223 в горизонтальном сечении плоским. В то же время, поскольку волновой фронт 1213 в вертикальном сечении все еще немного расходящийся, можно использовать положительную цилиндрическую линзу для фокусировки света только в вертикальном направлении (в общем случае, в направлении вдоль первой прямой линии) для того, чтобы вертикальный все еще немного расходящийся волновой фронт стал плоским. В результате центроид двумерных точек данных может располагаться в центре, и полный волновой фронт можно сделать полностью плоским. Это приведет к идеальной коррекции сферических и цилиндрических аномалий рефракции.
Вторая комбинация состоит в использовании значения компенсации дефокуса, которое привело ко второй (горизонтальной) прямой линии 1235 двумерной картины центроида точек данных, для выбора сферической линзы для коррекции сферической аномалии рефракции. Такая сферическая линза сделает волновой фронт 1215 в вертикальном сечении плоским. В то же время, поскольку волновой фронт 1225 в горизонтальном сечении немного сходящийся, отрицательная цилиндрическая линза может использоваться для только отрицательной фокусировки света в горизонтальном направлении (в общем случае, в направлении вдоль второй прямой линии), чтобы сделать горизонтально немного сходящийся волновой фронт плоским. В результате двумерный центроид точек данных может располагаться в центре, и полный волновой фронт можно сделать полностью плоским. Это приведет к другой идеальной коррекции сферических и цилиндрических аномалий рефракции.
Кроме этих двух комбинаций существуют и другие возможные комбинации. Например, если коррекция дефокуса (сферическая линза) соответствует по существу случаю круга наименьшего рассеяния, расположенного где-то между двумя прямыми линиями, то для коррекции астигматизма потребуется цилиндрическая линза как с положительной, так и с отрицательной цилиндрической рефракцией соответственно в двух перпендикулярных направлениях ориентации. Возможно, более практичным будет выбрать более тонкую общую комбинацию линз, соответствующую малым значениям диоптрий для коррекции как дефокуса, так и астигматизма. В некоторых случаях сферическая коррекция может быть той, которая соответствует кругу наименьшего рассеяния. Чтобы этого достигнуть, можно сканировать коррекцию дефокуса и использовать встроенный алгоритм для нахождения наилучшего соответствия последовательно обратной двумерной картине точек данных в виде круга, ища соответствия длинам большой и малой осей. При этом такая коррекция дефокуса будет являться ожидаемой сферической коррекцией, и диаметр круга двумерной картины точек данных можно использовать, чтобы определить градус все еще оставшегося астигматизма для выбора цилиндрической линзы как с положительной, так и с отрицательной оптической силой, перпендикулярной к направлению ориентации.
Следует отметить, что динамическая коррекция дефокуса на основе обратной связи измерения волнового фронта в реальном времени обеспечит много преимуществ при измерении аберраций глаза и коррекции зрения. В качестве одного варианта осуществления, когда описанное устройство используется для определения аномалий рефракции глаза пациента, конечный пользователь может с помощью устройства сканировать устройство компенсации дефокуса и также менять аккомодацию пациента для получения точного измерения аномалий рефракции в разных условиях аккомодации. Изменение аккомодации для обнаружения диапазона аккомодации пациента позволит врачу узнать диапазон и, также, дальнюю точку аккомодации, и таким образом зафиксировать пациента на желаемом расстоянии. Затем могут быть сделаны желаемые предписания для коррекции сферической и цилиндрической рефракции или даже для коррекции аберраций высших порядков на основе серии двумерных картин центроида точек данных, таких как одна из двух прямых линий двумерной картины точек данных, полученной при сканировании дефокуса.
Рецепт может также быть создан автоматически с использованием встроенного алгоритма, что дает преимущество в сканировании дефокуса и также аккомодации. Например, устройство компенсации дефокуса может вначале быть коротко просканировано для определения и оценки величины коррекции, которая позволит измеряемому волновому фронту от пациента попасть в диапазон измерений датчика волнового фронта. После этого можно определить диапазон аккомодации глаза, сканируя внутреннюю фиксацию, в то время как датчик волнового фронта отслеживает изменение волнового фронта. В диапазоне аккомодации, когда сканируется внутренняя фиксация, глаз способен компенсироваться, так что измеренный волновой фронт будет стремиться восстановить прежнее состояние. Однако когда внутренняя фиксация сканируется до одного из двух переделов аккомодации, глаз больше не сможет компенсировать изменение внутренней фиксации, теперь глаз «замутнен». Любое дальнейшее сканирование внутренней фиксации не приведет к отклику от глаза, и измерение волнового фронта в реальном времени не покажет, что глаз достиг одного из двух пределов аккомодации. Таким способом могут быть найдены два предела аккомодации глаза. Все эти процессы может автоматически осуществлять встроенный алгоритм.
Продолжая разговор об определении диапазона аккомодации, глаз можно заставить зафиксироваться в дальней точке диапазона аккомодации. Затем устройство компенсации дефокуса можно сканировать для определения, например, одной из двух прямых линий двумерной картины центроида точек данных. Опять же, это может быть сделано автоматически встроенным алгоритмом. Поскольку предварительно была сделана калибровка, длина прямой линии и направление ориентации смогут дать рецепт цилиндрической линзы, и текущее значение компенсации дефокуса должно быть способно дать рецепт сферической линзы. Полученный таким образом рецепт линзы учитывает диапазон аккомодации и позволит пациенту ясно увидеть удаленный объект и в то же время сфокусироваться так, чтобы ясно увидеть объект, расположенный ближе, чем позволяет его диапазон аккомодации.
Рецепт можно проверить при использовании пациентом пробных линз. Опять же, аккомодацию пациента можно изменить, и отображение в реальном времени двумерной картины точек данных скажет конечному пользователю, хорошо ли прошла коррекция зрения или нет. Кроме того, благодаря точному измерению волнового фронта при разных размерах кольца, а также контролю аккомодации пациента по всему диапазону аккомодации, высока вероятность того, что полученный таким образом рецепт (который может также учитывать аберрации высших порядков) будет гораздо более точным, чем полученный с использованием авторефрактометра, и поэтому существует вероятность, что такой рецепт будет достаточно хорош, чтобы субъективное подтверждение больше не потребовалось.
В качестве другого объекта одного варианта осуществления для вычисления и отображения на дисплее центрирования, величины или длины, а также направления ориентации угловой оси большой и малой осей эллипса наилучшего соответствия может использоваться цифровой процессор с встроенным алгоритмом, таким образом непосредственно выдавая конечному пользователю измеренные сферические и цилиндрические аномалии рефракции волнового фронта. Цифровой процессор может также выполнять наилучшее наложение отображаемой двумерной картины точек данных на эллипс и дальнейшее сопровождение конечного пользователя в точной настройке компенсации дефокуса, так что можно достигнуть даже более точного определения оси астигматизма.
Фигура 13 показывает примерную блок-схему основных этапов нахождения большой и малой осей и сферических и цилиндрических аномалий рефракции измеренного волнового фронта на основе двумерной картины центроида точек данных. Дополнительно процессор может также определять наличие аберраций высших порядков по заранее заданным критериям. Процессор может создавать сигнал, показывая отклонение построенного эллипса от круга, или сближение точек данных, или прямую линию, и этот сигнал можно использовать для управления элементом или устройством коррекции волнового фронта. Полученная информация может отображаться вместе с двумерной картиной центроида точек данных в окне дисплея волнового фронта. Например, в одном углу окна дисплея волнового фронта могут отображаться в реальном времени аномалии рефракции в единицах значений сферо-цилиндрических диоптрий и ось астигматизма в градусах, а также длина большой и малой осей эллипса наилучшего соответствия, отношение двух осей и наличие или отсутствие аберраций высших порядков. Кроме того, во время процедуры коррекции зрения масштаб отображаемой в реальном времени информации может быть автоматически цифровым способом увеличен или уменьшен, чтобы предупредить специалиста-практика по коррекции зрения, идет ли коррекция в верном или неверном направлении. Когда будет достигнут определенный уровень коррекции, отображаемая информация может быть выделена, например, размером шрифта, жирным шрифтом, стилем или цветом.
Обработка начинается в блоке 1302 обработки и продолжается в блоке 1304, где вычисляется средний вектор векторов исходных данных положения точки, полученный датчиками положения. В блоке 1306 обработки все векторы исходных данных положения точки преобразуются в средний вектор. В блоке 1308 обработки вычисляется средняя длина преобразованных векторов точек для определения среднего радиуса описанного круга. На этапе 1310 обработки длина каждого преобразованного вектора точки сравнивается со средним радиусом для выбора всех векторов точек, имеющих длину вектора, большую выбранного радиуса.
На этапе 1313 обработки используется алгоритм построения кривой для определения угла ориентации прямой линии, которая наиболее соответствует выбранным векторам точек. Этот угол является одной из осей астигматизма. На этапе 1314 обработки все преобразованные точки поворачиваются на угол ориентации для того, чтобы расположить большую и малую оси перпендикулярно декартовой системе координат.
На этапе 1316 обработки определяются магнитуды большой и малой полуосей методом вычерчивания кривой с подстановкой повернутых векторов точек в формулу эллипса. На этапах 1318 и 1320 обработки величины большой и малой полуосей используются для вычисления сферической и цилиндрической аномалий рефракции в диоптриях. Как описано выше, эта информация доставляется пользователю в виде рецепта на корригирующие линзы.
На этапе 1322 обработки вычисляется отклонение от эллипса для определения наличия аберраций высших порядков, которые могут дополнительно анализироваться для определения параметров коррекции.
На этапе 1324 обработки длина большой оси или отношение длин большой и малой осей построенного эллипса может использоваться для определения того, близок ли построенный эллипс к кругу, или к точке данных, или к прямой линии, и может выводиться сигнал для указания элементу коррекции волнового фронта изменить коррекцию. По встроенному алгоритму или вводу пользователя этапы обработки могут повторяться, пока не будет достигнуто желаемое соответствие, например, прямой линии. Наконец, обработка заканчивается на этапе 1326 обработки.
Алгоритм может быть автоматически встроен в микроконтроллер, извлекающий встроенные программы, содержащиеся во встроенной памяти. Альтернативно, программный код может храниться в главном компьютере и использоваться для управления различными модулями управления, или может использоваться некоторая комбинация управления с главного компьютера и встроенных программ.
Можно также цифровым способом увеличивать или уменьшать масштаб отображаемой двумерной картины точек данных для «усиления» или «ослабления» двумерной картины точек данных на дисплее. Этот признак будет особенно полезен для процедур коррекции зрения в реальном времени. Сканирование компенсации дефокуса позволит конечному пользователю находить две «прямые линии» и, следовательно, ось астигматизма. При проведении коррекции астигматизма в реальном времени длина двух «прямых линий» или длина эллипса будет уменьшаться с ходом коррекции, и на определенном этапе понадобится «увеличить масштаб» и тонко настроить коррекцию дефокуса, чтобы увидеть, похожа ли все еще двумерная картина точек данных на «прямую линию», пока она не исчезнет или не будет достигнут «идеальный» круг или полное совпадение точек данных в одну.
Описываемое в настоящее время устройство может быть разработано для облегчения работы несколькими способами, говоря о взаимодействии пользователя с устройством. Во-первых, в систему может быть введена демографическая информация о пациенте. Это происходит или непосредственным вводом данных с клавиатуры компьютера, или посредством установленных стандартов безопасности и коммуникации, таких как совместимые протоколы DICOM и HIPAA в Electronic Medical Record, которые соединяются электронной сетью и взаимодействует с установленным интерфейсом, таким как Health Language 7. Как только демографические данные пациента загружены в устройство, выбирается несколько других параметров. Пользователь может осуществлять ввод множеством способов, включая клавиатуру, сенсорный экран, голос, перчатки виртуальной реальности и ножное переключение. Параметры, которые можно ввести, изначально включают в себя оперируемый глаз, осуществляемую процедуру (например, имплантация торической, мультифокальной или аккомодационной интраокулярной линзы [ИОЛ]), положительный или отрицательный цилиндр, который нужно отобразить, включение/выключение записи данных, включение/выключение звуковой обратной связи и включение/выключение дисплея поднятой головы.
В одном или более примерных вариантах осуществления конечному пользователю измерительного устройства, такого как датчик волнового фронта для аномалий рефракции глаза или аберраций, предоставлена свобода управления формой, форматом, передаточной функцией, приложением, выражением, выводом результирующего данного или данных и выбора им/ей алгоритма.
Одним примерным вариантом осуществления является устройство, содержащее фокусирующую линзу парциального волнового фронта, способную фокусировать парциальный волновой фронт, являющийся участком падающего волнового фронта, созданного источником света, в пятно изображения, расположенное в фокальной плоскости, устройство последовательного сканирования волнового фронта, способное последовательно сканировать различные участки волнового фронта, падающего на фокусирующую линзу парциального волнового фронта, переменную апертуру, способную управлять размером парциального волнового фронта, устройство считывания положения, расположенное по существу в фокальной плоскости фокусирующей линзы парциального волнового фронта, способное определять положение пятна изображения на фокальной плоскости, управляемый элемент корректировки волнового фронта, расположенный так, чтобы перехватить волновой фронт до его падения на датчик волнового фронта, устройство пользовательского ввода, непереносное устройство хранения данных, читаемое компьютером, содержащее одно или более значения данных, сохраненные измерительным устройством, и программу и контроллер, соединенный с управляемым элементом коррекции волнового фронта, устройство пользовательского ввода и устройство хранения данных, способное управлять управляемым элементом коррекции волнового фронта для коррекции выбранных компонентов аберраций волнового фронта для измерения одного или более оставшихся компонентов аберрации участка волнового фронта, исполнять программу для определения одного или более оставшихся компонентов аберрации волнового фронта с одной или более соответствующими переменными, принимать выбранный пользователем алгоритм, обрабатывающий одну или более переменных для оценки или изменения одной или более переменных, для обеспечения результирующего значения и вывода результирующего значения.
Другой примерный вариант осуществления представляет собой устройство, содержащее: датчик волнового фронта, способный получать исходные данные значений аберрации волнового фронта глаза; устройство пользовательского ввода, способное дать конечному пользователю выбрать один из множества заранее заданных процессов, таких как алгоритмы, фильтры и анализы, в котором выбранный заранее заданный процесс управляет исходными значениями данных аберрации волнового фронта для оценки или изменения исходных значений данных аберрации волнового фронта и выводит результирующие данные в различных формах; стационарное устройство хранения данных, читаемое компьютером, хранящее одно или более исходных значений данных аберрации волнового фронта, полученных датчиком волнового фронта измерительного устройства, и программный код; контроллер, связанный с устройством хранения данных и с устройством пользовательского ввода, способный исполнять программный код для определения одного или более значения исходных данных аберрации волнового фронта, выбираемый пользователем процесс, алгоритм, который обрабатывает одну или более переменных для исполнения выбранного пользователем процесса для оценки или изменения одного или более исходных значений данных аберрации волнового фронта и для вывода результирующих данных.
Другим примерным вариантом осуществления является устройство, содержащее: фокусирующую линзу парциального волнового фронта, способную фокусировать парциальный волновой фронт, являющийся участком падающего волнового фронта, созданного источником света, в пятно изображения, расположенное в фокальной плоскости; устройство последовательного сканирования волнового фронта, способное последовательно проецировать различные участки падающего волнового фронта на фокусирующую линзу парциального волнового фронта; переменную апертуру, способную управлять размером парциального волнового фронта; устройство считывания положения, расположенное по существу в фокальной плоскости фокусирующей линзы парциального волнового фронта, способное определять положение пятна изображения в фокальной плоскости; управляемый элемент коррекции волнового фронта, расположенный так, чтобы перехватить участок волнового фронта до его падения на датчик волнового фронта; устройство пользовательского ввода; стационарное устройство хранения данных, читаемое компьютером, хранящее одного или более значений данных, полученных измерительным устройством и программой; и контроллер, соединенный с управляемым элементом коррекции волнового фронта, устройством пользовательского ввода и устройством хранения данных, способный управлять управляемым элементом коррекции волнового фронта для коррекции выбранных компонентов аберрации волнового фронта, чтобы измерять один или более оставшийся компонент аберрации участка волнового фронта, исполнять программу для сравнения одной или более оставшихся компонентов аберрации волнового фронта с одной или более соответствующими переменными, принимать выбранный пользователем алгоритм, обрабатывающий одну или более переменных для оценки или изменения одного или более результирующих значений и вывода результирующего значения.
Другим примерным вариантом осуществления является устройство, содержащее: фокусирующую линзу парциального волнового фронта, способную фокусировать парциальный волновой фронт, являющийся участком падающего волнового фронта, созданного источником света, в пятно изображения, расположенное в фокальной плоскости; устройство последовательного сканирования волнового фронта, способное последовательно проецировать различные участки падающего волнового фронта на фокусирующую линзу парциального волнового фронта; переменную апертуру, способную управлять размером парциального волнового фронта; устройство считывания положения, расположенное по существу в фокальной плоскости фокусирующей линзы парциального волнового фронта, способное определять положение пятна изображения в фокальной плоскости; управляемый элемент коррекции волнового фронта, расположенный так, чтобы перехватить участок волнового фронта до его падения на датчик волнового фронта; устройство пользовательского ввода; непереносное устройство хранения данных, читаемое компьютером, хранящее одного или более значений данных, полученных измерительным устройством и программой; и контроллер, соединенный с устройством пользовательского ввода и с устройством хранения данных, способный исполнять программу для сравнения одного или более значений данных с одной или более соответствующими переменными, исполнять выбранный пользователем процесс, обрабатывающий одну или более переменных для оценки или изменения одной или более переменных для обеспечения результирующего значения и вывода результирующего значения в определенном формате.
Следует понимать, что признаки различных вариантов осуществления, описанные выше и во всей заявке, могут объединяться друг с другом и/или заменять друг друга.
Фигура 13A представляет собой блок-схему одного примерного варианта осуществления. Согласно фигуре 13A, измерительное устройство 13110 соединено с интерфейсом 13111 устройства, включающим в себя контроллер 13112, включающий процессор 13114, память 13116, интерфейс 13118 устройства и интерфейс 13120 ввода/вывода, и внутреннюю шину 13122, соединяющую различные компоненты контроллера. Устройство 13124 пользовательского ввода, такое как клавиатура или мышь, и устройство 13126 вывода, такое как дисплей, соединены с интерфейсом 13120 ввода/вывода.
Измерительное устройство 13110 соединено с интерфейсом 13118 устройства (или, альтернативно, с интерфейсом 13120 ввода/вывода) и передает в виде исходных данных результаты измерений контроллеру 13112.
Целью является не ограничить возможности устройства по работе с данными теми, что предусмотрены производителем, а дать отдельному пользователю большую свободу настройки в соответствии со своими предпочтениями, которая потенциально может меняться при различных приложениях устройства. Это служит меняющимся и индивидуальным потребностям конечных пользователей в управлении теми процессами, которые они хотят применить (особые алгоритмы, фильтры и анализы, например) к данным, и в отображении данных, удовлетворяя их меняющиеся потребности. Эти процессы можно, например, применять в реальном времени, сохранять для последующего использования, пересылать по Интранету или Интернету. Они могут осуществлять одновременно или последовательно по выбору пользователя.
Таков новый способ и процесс (процессы), которые можно применить к существующим и будущим продуктам. Фигура 13B показывает примерную блок-схему этапов. В примерном варианте осуществления эти этапы будут выполняться контроллером при исполнении программы, хранящейся в памяти. Исходные данные от измерительного устройства будут также храниться в памяти.
На этапе 13202 запуска будет инициироваться, или запускаться, приложение/процесс устройства.
На следующем этапе 13204, который может быть частью процесса инициализации или запускаться пользователем, «машина» спрашивает пользователей, желают ли они изменить алгоритм по умолчанию или предыдущий алгоритм (алгоритмы), использовавшиеся для отображения, или представления, или хранения, или передачи результирующей информации из собранных или полученных данных. В частности, алгоритм по умолчанию или предыдущий алгоритм (алгоритмы) могут быть алгоритмами датчика волнового фронта для измерения (измерений) аномалии рефракции или аберрации глаза.
Если пользователь выбирает «нет», процесс переходит к этапу 13220, на котором машина может либо использовать алгоритм по умолчанию или предыдущий алгоритм (алгоритмы), или попросить пользователя выбрать из списка заранее заданных алгоритмов.
Как только выбор сделан, машина работает по плану, предоставляя результирующие данные по выбору пользователя, что показывает этап 13222, за которым следует этап 13230 завершения.
С другой стороны, если пользователь выбирает «да», машина запускает процесс пользовательского ввода, что показывает этап 13206.
На этапе 13208 машина позволяет пользователю ввести процесс или алгоритм.
На следующем этапе 13210 машина назначает полям исходного данного конкретную функцию, функции или алгоритмы.
На этапе 13212 функция (функции) или алгоритм (алгоритмы) осуществляют оценку/изменение данных по желанию пользователя и выводят их в различных формах перед этапом 13230 завершения.
В качестве опции эти алгоритмы могут быть введены в реальном времени, например, с клавиатуры, или импортированы из другой среды.
В качестве другой опции машина может также предоставить пользователю набор заранее заданных алгоритмов или процессов, которые можно применять отдельно или вместе с данными машины. Например, может существовать алгоритм/модуль низкочастотного фильтра и функция/модуль преобразования в полярные координаты. Пользователь может выбрать преобразование данных в полярные координаты и затем низкочастотную фильтрацию.
Любые перечисленные выше входные данные можно сохранять для дальнейшего использования. Таким образом, пользователь может создавать «библиотеку» пользовательских/записанных функций/приложений.
В качестве еще одной опции, машина может также напомнить пользователю определить желаемый способ или способы вывода данных. Например, пользователь может выбрать вывод на графический дисплей, аудио, числовой формат или все вместе. Выходные данные можно также экспортировать в другое приложение или машину/устройство, влияя или нет на их функциональность, или для объединения использования/хранения данных.
Машина может представлять предустановленные алгоритмы/приложения так, чтобы напоминать пользователю поменять в реальном времени применяемый в настоящее время алгоритм/приложение на новый без необходимости ставить на паузу или останавливать текущий процесс (процессы) машины.
Дополнительно пользователю может поступить напоминание о выборе способа, которым будут представлены результирующие данные, исходные или обработанные. Машина может напомнить пользователю выбрать графическое отображение, способ отображения и отображаемые пределы данных. Альтернативно пользователь может выбрать для отображения данные, обработанные или исходные, с графическим компонентом или без него.
В общем случае данные/данное от устройства, полученные от или через микропроцессор, через канал связи или отображенные, могут быть введены в созданный или выбранный пользователем процесс или процессы. Пользователь будет иметь возможность вводить особые данные или данное в особе поле ввода (независимую переменную) при их создании.
Например, процессор устройства может визуально представлять конечному пользователю данные на ЖК (жидкокристаллическом) дисплее. Эти данные могут быть представлены непрерывным набором данных в виде прямой, y=mx+b (задано производителем по умолчанию). Конечному пользователю может потребоваться представление данных в виде полинома третьей степени, y=k3x3+k2x2+k1x+k0. Процессор устройства предоставляет пользовательскому интерфейсу механизму/способ, позволяющий конечному пользователю вводить в уравнение y=k3x3+k2x2+k1x+k0 и однозначно вводить/назначать данное (независимую переменную). Затем пользователь может выбрать, как он/она хочет использовать результаты уравнения; представлять реальное время в виде 'y' (зависимой переменной), выводить графически в виде вычерченной линии, сохранять для последующего обращения, передавать куда либо или делать все вышеперечисленное.
Например, если полями исходных данных были измеренная сферическая аномалия рефракции и измеренная цилиндрическая аномалия рефракции афакичного глаза, измеренная авторефрактометром, тогда этим полям исходных данных могут быть назначены параметры u и v, соответственно. Если пользователю требуется результирующее значение, w, связанное с мощностью интраокулярной линзы (ИОЛ), тогда с помощью устройства ввода можно ввести алгоритм «w=0,07 (u+0,5v)2+1,27 (u+0,5v)+1,22».
Кроме полиномов, для использования в алгоритмах, вводимых пользователем, могут быть также предусмотрены такие функции, как логарифм и экспонента.
Фигуры 13C и 13D представляют собой примеры скриншотов описанного выше процесса. На фигуре 13C определяется назначение переменных исходным данным и пользователю напоминают ввести алгоритм. На фигуре 13D отображаются значения данных, связанные с переменными, и результирующие значения.
Настоящий способ предоставляет пользователю полную гибкость в использовании возможностей процессора и устройства и в настройке конечного продукта для наиболее продуктивного использования.
Данную технику/подход можно применить к любому устройству, процессору или способу хранения, получения и/или создания данных. Вариантами осуществления могут быть авторефрактометры или датчики волнового фронта, в которых данные от устройства могут иметь множество применений/результатов, таких как рецепты, двух- или трехмерные графики, усреднения; офтальмологические камеры, в которых фотографические данные могут обрабатываться традиционным алгоритмом, таким как БПФ; вывод пульсоксиметра, в котором данные от удара к удару могут обрабатываться по отдельным событиям.
Примерный вариант осуществления может выполняться вручную, голосом, по сценарию и/или может быть дан в отдельном приложении/процессе к исходному процессу. Этот процесс может осуществляться до, во время или после использования машины/устройства. Таким образом, пользователь получает возможность гибкого планирования желаемого результата (результатов) до начала использования машины/устройства; регулирования результатов в реальном времени во время использования машины/устройства; или использования позже при оценке собранных данных, пользуясь изменением процессов. Выполнение приложения может происходить по отдельности отдельным фиксированным приложением, или несколькими приложениями, выполняемыми последовательно, случайно, или предпочитаемым приложением или использованием машины/устройства или процесса.
Теперь будет сделано более подробное описание варианта осуществления интерфейса устройства, объединенного с особым датчиком волнового фронта, разработанного правопреемником настоящей заявки. В данном варианте осуществления исходные измеренные данные включают в себя, например, сферическую аномалию рефракции, цилиндрическую аномалию рефракции и аберрации высших порядков, такие как кома, трилистник и сферические аберрации. Теперь будет описано измерительное устройство.
Динамическая система волнового фронта, показанная на фигуре 5, система электронного контроля и управления, показанная на фигуре 6, позволяют выбрать волновой фронт согласно составу выборки во время коррекции некоторых аберраций низших порядков, так что информация о некоторых отдельных аберрациях волнового фронта высших порядков может быть явно выделена, или наоборот. Например, динамически корректируя дефокус и компенсируя астигматизм, можно выявить и отобразить в формате, легко понятном клиническим специалистам-практикам наличие такой аберрации высших порядков (АВП), как кома, самая распространенная АВП, с которой очень часто сталкиваются хирурги и для которой есть техники оперативного воздействия.
В настоящем варианте осуществления, микроконтроллер 601 дополнительно исполняет программу, хранящуюся, например, в памяти 602, для осуществления этапов, описанных выше со ссылкой на фигуре 13B. Пользователь осуществляет ввод и получает вывод через соединенный главный компьютер и модуль 592 отображения. Альтернативно, пользовательский ввод может обеспечиваться микроконтроллеру 601 напрямую посредством присоединенного устройства пользовательского ввода и вывода, связанного с устройством вывода.
В другом варианте осуществления микроконтроллер 601 выводит исходные данные на главный компьютер и модуль 592 отображения, и обработка, описанная выше со ссылкой на фигуру 13B, будет осуществлена главным компьютером и модулем 592 отображения.
Описанные выше варианты осуществления могут использоваться во множестве приложений. Например, они могут использоваться в линзметре для измерения и тонкой настройки преломляющей способности линз, включая очковую линзу, контактную линзу и/или ИОЛ. Хотя различные варианты осуществления, которые объединены идеей настоящего изобретения, были здесь подробно показаны и описаны, специалисты в данной области техники смогут легко разработать много других измененных вариантов осуществления, все еще объединенных данной идеей.
Как только описанная выше информация введена, система готова к началу использования. Затем хирург завершает извлечение катаракты и до введения ИОЛ начинает измерять волновой фронт афакичного глаза. Детерминированная система динамического считывания (детектирования) волнового фронта включается одним из упомянутых выше способов, таких как механизмы взаимодействия с устройством. Затем, после имплантации ИОЛ хирургом, измерение волнового фронта продолжается. Хирург регулирует положение ИОЛ в глазу до тех пор, пока измерение не подтвердит оптимальное размещение ИОЛ. Как только операция завершена, данные сохраняются (если была включена запись данных) и система отключается.
В качестве прикладного варианта осуществления описанное в настоящее время устройство может использоваться в хирургии катаракты для оптимизации имплантации традиционной интраокулярной линзы (ИОЛ). Вначале, когда из глаза удаляют хрусталик, описываемое в настоящее время устройство может использоваться для подтверждения условия афакии по всей видимой области роговицы посредством динамического изменения размера кольца. Когда ИОЛ имплантирована, при настройке компенсации дефокуса цифровое усиление двумерного положения точек данных относительна начала координат системы на дисплее может также увеличиваться или уменьшаться, позволяя конечному пользователю «увеличивать масштаб» и «уменьшать масштаб», тем самым «усиливая» или «ослабляя» двумерную картину точек данных. В случае коррекции чисто сферической аномалии рефракции, меняя коррекцию дефокуса, конечный пользователь может управлять диаметром похожей на круг двумерной картины точек данных, чтобы упростить центрирование двумерной картины точек данных относительно опорной точки (такой как начало координат) декартовой системы координат и таким образом достигнуть лучшей точности размещения ИОЛ в глазу. Рефракционный хирург может по необходимости менять размер круга, меняя коррекцию дефокуса, а также управляя цифровым «масштабированием», и, в результате, точность размещения имплантируемой ИОЛ может быть существенно улучшена посредством перемещения ИОЛ до тех пор, пока двумерная картина точек данных в виде круга не окажется в центре относительно опорной точки (такой как начало координат) системы координат по некоторым заранее заданным критериям. «Сближение», или «сжатие» рассеянных точек данных, особенно с помощью функции «уменьшения масштаба» посредством управления цифровым уменьшением поможет точному размещению ИОЛ, и в то же время управляющий сигнал, соответствующий наилучшему сближению точек данных при «уменьшении масштаба» точно укажет, достигнута ли точная коррекция сферической аномалии рефракции. Этот процесс нахождения наилучшего положения центрирования может быть также автоматизирован встроенным алгоритмом.
В качестве еще одного другого приложения варианта осуществления описываемое в настоящее время устройство может использоваться для определения того, имеет ли имплантированная мультифокальная ИОЛ желаемый фокусный диапазон, дополнительно к оптимизации ее размещения. Как известно специалистам в данной области техники, мультифокальная линза обычно имеет множество концентрических кольцевых зон, при этом каждое кольцо имеет различную преломляющую силу. В общем случае, чем дальше зона от центра и ближе к внешней периферии, тем уже становится ширина кольца. В US20080278683 упоминалось, что, используя адаптивный последовательный датчик волнового фронта для измерения волнового фронта, можно регулировать диаметр и ширину выбранного кольца посредством управления углом наклона сканирующего зеркала и размером апертуры выборки парциального волнового фронта так, что можно сделать выбранные парциальные волновые фронты совпадающими с различными кольцевыми зонами имплантированной мультифокальной ИОЛ. Описываемое в настоящее время устройство может, таким образом, использоваться для измерения волнового фронта отдельно от каждой кольцевой зоны и отображение/обратная связь в реальном времени результата измерений вместе с надлежащей коррекцией дефокуса и также, при необходимости, с изменением аккомодации, может сказать рефракционном хирургу, достигнута ли желаемая коррекция сферической аномалии рефракции для конкретной зоны. Когда получена преломляющая сила каждой отдельной зоны, может быть также определен полный диапазон фокусировки имплантированной мультифокальной линзы. Таким образом, хирург сможет сказать, была ли операция успешна в плане увеличения диапазона фокусировки пациента до определенного градуса или протяженности.
В качестве ключевого приложения варианта осуществления описываемое в настоящее время устройство может использоваться для оптимизации имплантации и ориентации торической ИОЛ. При имплантации торической ИОЛ во время рефракционной хирургии катаракты, дополнительно к центрированию и оптимизации наклона торической ИОЛ, решающим этапом является поворот торической ИОЛ до желаемой оси ориентации так, чтобы достигнуть полной коррекции астигматизма. Функция цифрового «увеличения масштаба» может стать наиболее полезной при процедуре имплантации ИОЛ. Фигура 14 показывает схематическую диаграмму торической ИОЛ, имеющей разметку оси. В качестве одного объекта данного варианта осуществления, дефокус может быть скорректирован, чтобы двумерная картина точек данных на дисплее превратилась в прямую линию, и в результате любой оставшийся астигматизм мог быть показан более подробно. На этом этапе имплантированную торическую линзу можно поворачивать так, чтобы отображаемая прямая линия двумерных точек данных превратилась в круг. Затем дефокус можно продолжать настраивать, чтобы продолжать пытаться превратить изображение двумерных точек данных в прямую линию, и теперь можно использовать функцию «увеличения масштаба», в то время как торическая линза продолжает поворачиваться до изменения прямой линии на круг. Этот процесс можно повторять до тех пор, пока не будут достигнуты определенные заранее заданные критерии. Поворачивая имплантированную торическую ИОЛ для преобразования прямой линии или эллипса в круг, а также тонко настраивая дефокус с помощью цифрового «увеличения масштаба», чтобы убедиться, что круг может «сблизиться» в опорную точку или начало декартовых координат, можно более точно хирургически определить желаемое положение и угловую ориентацию имплантированной торической ИОЛ.
В качестве еще одного другого приложения варианта осуществления описываемое в настоящее время устройство может использоваться для проверки того, что имплантированная аккомодативная, или аккомодационная, интраокулярная линза (АИОЛ) может обеспечить желаемый диапазон аккомодации. Как хорошо известно специалистам в данной области техники, АИОЛ представляет собой линзу, способную менять свою преломляющую силу в глазу под действием ресничной мышцы. Во время имплантации АИОЛ, дополнительно к центрированию АИОЛ, если ресничная мышца все еще функционирует, можно регулировать аккомодацию пациента на разных расстояниях с помощью переменной внутренней фиксации. При другом способе, чтобы сделать возможным изменение аккомодации, может использоваться другой механизм стимуляции ресничной мышцы. Сканируя коррекцию дефокуса и также выполняя измерение волнового фронта в реальном времени, можно осуществить более точное измерение аномалий рефракции по полному диапазону аккомодации имплантированной АИОЛ. Это укажет на то, достигнут ли желаемый диапазон аккомодации, регулируемый ресничной мышцей, при имплантации АИОЛ. Такое же измерение может также быть проведено после хирургической операции, когда аккомодационная способность пациента восстановилась.
В качестве другого приложения варианта осуществления описываемое в настоящее время устройство может также использоваться для осуществления терапии пресбиопии и для максимального улучшения результатов операции после имплантации АИОЛ. Специалистам в данной области техники известно, что внутренний физиологический механизм аккомодации одинаков для естественной аккомодации и для АИОЛ. Возможность описанного здесь устройства обнаруживать изменения аккомодации пациента при получении результатов измерения волнового фронта в реальном времени может использоваться посредством биологической обратной связи пациенту для улучшения оставшихся способностей, таким образом отсрочивая начало пресбиопии, и для лечения пресбиопии в самом начале.
После операции пациент с имплантированной АИОЛ может также использовать информацию биологической обратной связи в реальном времени для улучшения функционирования линзы посредством психофизической обратной связи. Другими словами, устройство может записывать полное оптическое состояние глаза в реальном времени, собирать и анализировать данные и возвращать результаты пациенту для максимального улучшения свойств АИОЛ. Обратную связь можно получить на основе информации о волновом фронте в реальном времени и измерения в реальном времени диапазона аккомодации или амплитуды. Обратная связь также может быть в форме исходных данных, полученных информационных карт, связанных с амплитудой аккомодации, и/или других чувственных восприятий, управляемых максимальным увеличением аккомодации (включая визуальную, звуковую, обонятельную, тактильную и/или вкусовую обратную связь).
В качестве еще одного другого приложения варианта осуществления описываемое в настоящее время устройство может использоваться для придания формы и размещения наружной и внутренней роговичных вкладок. Специалистам в данной области техники хорошо известно, что под или на роговицу можно имплантировать вкладки и накладки из биосовместимого материала, и их можно иссекать энергией эксимерного или фемтосекундного лазера или другой точной технологией иссечения. Такое иссечение дает возможность проведения точной и обратимой рефракционной процедуры, позволяющей избежать сложностей эктазии и возможного послеоперационного высыхания глаза. Описываемое в настоящее время устройство может, таким образом, использоваться для оптимизации иссечения или для производства вкладок или накладок для достижения оптимальной остроты зрения. Изменение на "blanks" может осуществляться как до, так и после имплантации внутрь или на глаз. Существует множество материалов, которые можно использовать, включая искусственный коллаген с или без поперечных связей, потенциально с поперечными связями внутри операционного ложа роговицы пациента, или различные гидрогели и современные полимеры. Можно определить спецификации материала для оптимизации работы с измерением волнового фронта в реальном времени, а также биосовместимости, обратимости, последующего усовершенствования и оптических свойств. Например, спецификация материала может быть такова, чтобы его можно было модифицировать и/или производить по сравнительно недорогой технологии (например, лазерное или электромагнитное излучение любой оптимальной длины волны, которое может быть безопасно доставлено ex-vivo, поскольку не происходит взаимодействия с глазом пациента, и гораздо менее дорого, чем эксимерные или фемтосекундные лазеры).
Данные волнового фронта в реальном времени, обеспеченные описанным здесь устройством, могут использоваться для измерения аберраций глаза, осуществления способом петли обратной связи в реальном времени удаления или создания вкладок и накладок ex-vivo (как на переднюю, так и на заднюю поверхности), и затем имплантации продукта при интраоперационном подтверждении волнового фронта в реальном времени для точного позиционирования. При таком способе глаз пациента никогда не подвергается облучению лазером, и процедура полностью обратима. Вкладки и накладки могут быть полностью удалены, при этом может вводиться новый имплант. Альтернативно и дополнительно, в любое время в будущем может быть проведена операция по усовершенствованию материала вкладки или накладки. В качестве другой опции, вначале может быть размещена вкладка или накладка, а затем данные волнового фронта в реальном времени могут использоваться для иссечения вкладки или накладки in-vivo в реальном времени с петлей обратной связи. В клиническом аспекте все эти подходы приводят к обратимой процедуре, проводимой при точном измерении волнового фронта в реальном времени, обеспечиваемом описанным здесь устройством. Интраоперационная часть процедуры становится возможна благодаря точному позиционированию вкладки или накладки с использованием описанного здесь устройства. Дополнительным клиническим преимуществом при процедуре ex-vivo является то, что энергия не доставляется глазу, и это уменьшает степень послеоперационного высыхания глаза или другие послеоперационные осложнения.
Фигура 15 показывает схематическую диаграмму другого варианта осуществления, в котором устройство динамического управления волновым фронтом используется для коррекции некоторых выбранных компонентов аберрации волнового фронта от глаза. Модуль 1535 источника света, модуль 1583 получения инфракрасных изображений, модуль 1542 внутренней фиксации/проекции остроты зрения, модуль 1528 датчика волнового фронта реального времени, модуль 1532 электронного управления и контроля и модуль 1592 отображения выполняют те же функции, что и 535, 583, 542, 528, 532 и 592, показанные на фигуре 5. Модуль 1535 источника света, содержащий источник 1534 света, собирающую линзу 1537 и элемент 1536 направления пучка используются для направления узкого пучка света на сетчатку глаза 1538 пациента. Следует отметить, что некоторые из этих модулей не являются абсолютно необходимыми для функционирования устройства, как уже обсуждалось выше. На фигуре 15, кроме элемента 1505 активной компенсации дефокуса, добавлен модуль 1550 управления волновым фронтом, который на фигуре 15 представлен деформируемым зеркалом 1552. Причина включения элемента 1505 компенсации дефокуса дополнительно к деформируемому зеркалу 1552 заключается в том, что, вообще говоря, деформируемое зеркало имеет сравнительно малый ход, что означает, что его диапазон компенсации дефокуса ограничен. Поэтому комбинация деформируемого зеркала с элементом компенсации дефокуса позволит достигнуть управления волновым фронтом в большом практическом диапазоне, так как изменение дефокуса или сферической аномалии рефракции является самым большим среди всех аберраций волнового фронта различных глаз. Однако, следует отметить, что, если модуль 1550 управления волновым фронтом действительно имеет достаточно большой динамический диапазон, то элемент 1505 компенсации дефокуса не нужен. Итак, элемент 1505 компенсации дефокуса не является абсолютно необходимым элементом функционирования варианта осуществления, показанного на фигуре 15.
Следует отметить, что вариант осуществления, показанный на фигуре 15, является расширением варианта, показанного на фигуре 5. Концепция состоит в коррекции некоторых компонентов аберрации волнового фронта на основе обратной связи с измерением волнового фронта в реальном времени, чтобы оставшиеся компоненты аберрации могли проявиться более ясно. Различия между вариантом осуществления с фигуры 15 и вариантом, описанным в US20080278683, состоит в том, что модуль 1550 управления волновым фронтом установлен в пути света для обеспечения коррекции. В предыдущих вариантах осуществления только упоминалась компенсация или функция обнуления такого элемента. В настоящем варианте осуществления, дополнительно к компенсации или функции обнуления, модуль 1550 управления волновым фронтом также обеспечивает активную коррекцию или частичную компенсацию только некоторых компонентов аберрации волнового фронта от глаза пациента. Активная коррекция находится в ведении рефракционного хирурга или управляется встроенным алгоритмом, согласно отображению и/или обратной связи в реальном времени измерения волнового фронта. Одним объектом настоящего варианта осуществления является сканирование коррекции конкретных компонентов аберрации в диапазоне измерения датчика волнового фронта с изменением или без изменения аккомодации глаза по всему диапазону аккомодации, так что может быть получении лучшее и более точное измерение аберраций глаза.
Следует отметить, что, хотя деформируемое зеркало показано на фигуре 15 в качестве элемента управления волновым фронтом, могут использоваться другие элементы управления волновым фронтом, включая устройство управления волновым фронтом на основе пропускающего жидкого кристалла. Одним уникальным преимуществом объединения пропускающего устройства управления или коррекции волнового фронта с датчиком волнового фронта реального времени является то, что можно получить действительно компактную систему адаптивной оптики.
Элемент управления волновым фронтом может быть расположен где угодно вдоль оптического пути, поскольку он служит для коррекции некоторых выбранных компонентов аберрации волнового фронта. В самом деле, для компактности элемент управления волновым фронтом может быть спроектирован вместе с другим оптическим элементом (элементами) внутри датчика 1528 волнового фронта. Такой последовательный датчик волнового фронта реального времени адаптивной оптики может быть конструктивно мал и поэтому может встраиваться в большое количество оптических измерительных систем и систем визуализации, таких как рефракционный операционный микроскоп. Следует также отметить, что, хотя последовательный датчик волнового фронта 1528 показан на фигуре 15, могут также использоваться другие типы датчиков волнового фронта, если они могут обеспечить измерение волнового фронта, включая датчики Шака-Гартмана, Тальбота-Муаре, Чернинга, отслеживание луча, фазовое различие и интерферометрические датчики волнового фронта.
Независимая форма распознавания и управления волновым фронтом свойственна описанному здесь изобретению в том, что отдельный оптический путь, состоящий из локального манипулятора волнового фронта, взаимодействует с обратным пучком отдельным действием по уменьшению и переформированию аберраций прошедшего пучка для получения определенных измерений локальных изменений наклона, проводимых на обратном пучке. Активный манипулятор вносит локальное отклонение или деформацию пучка, "совпадающую" с обратным знаком входящего пучка, устраняя таким образом отклонение исходного пучка при считывании и измерении. Активный манипулятор пучка затем регистрирует природу аберраций пучка, позволяя активное обнаружение и изоляцию каждой обнаруженной переменной аберрации. Затем это дает возможность привнесения или удаления некоторых аберраций относительно всех или выбранных существующих аберраций. В этом активном происходящем процессе детерминированная динамическая система детектирования волнового фронта может затем обеспечить основу для запроса от относительного влияния существующих аберраций на активные характеристики системы, которые оцениваются. Активный локальный манипулятор волнового фронта способен независимо работать как с глобальным, так и с локальным аспектами аберрации. Манипулятор может использоваться вместе с линейной оптикой для компенсации сферических аберраций для полного улучшения и обеспечения возможности выбора диапазона измерений при активной оценке подробного состава неравномерностей волнового фронта.
Описываемое в настоящее время устройство, показанное на фигуре 15, может обеспечивать результаты измерения волнового фронта в реальном времени и поэтому использоваться для интраоперационной оптимизации тех процедур по хирургии рефракции, которые могут скорректировать аберрации высших порядков. Например, в будущем ИОЛ могут стать обычным средством коррекции аберраций высших порядков, таки как кома, и в таком случае, когда потребуется имплантировать такую ИОЛ в глаз, возникнет необходимость во время имплантации располагать ее правильно. Устройство, как показано на фигуре 15, может использоваться для компенсации, например, астигматизма, во время компенсации дефокуса. В результате аберрации высших порядков, такие как кома, могут более ясно проявляться в двумерной картине точек данных с определенной компенсацией дефокуса. Затем рефракционный хирург может тонко регулировать положение ИОЛ для коррекции аберрации высших порядков, чтобы убедиться, что коррекция аберраций высших порядков оптимизирована. Могут быть случаи, когда потребуется скорректировать аберрации высших порядков лазерным иссечением ткани роговицы, тогда как аберрации низших порядков можно скорректировать имплантацией торической ИОЛ. Этот подход может дать преимущество пациентам с катарактой и с аберрациями глаза как высших, так и низших порядков. При коррекции аберрации низших порядков торической ИОЛ, что обычно делается во время хирургии катаракты, вещество ткани роговицы, которое потребуется иссечь, чтобы скорректировать только аберрации высших порядков, будет значительно меньше, чем если бы нужно было скорректировать все аберрации иссечением роговицы.
Все хирургические процедуры по коррекции рефракции, которые могут скорректировать аберрации высших порядков, включая ЛАСИК, СБК, ЛТК, ИнтраЛАСИК, ФлексиЛАСИК, ФРК, ЛАСЭК, РК, LRI, CRI и ДК, получают преимущества при использовании описанного здесь устройства. В этих процедурах волновой фронт можно выбирать согласно любому составу выборки, так что можно получить информацию о некоторых конкретных компонентах аберрации волнового фронта. Может быть покрыт весь волновой фронт и наличие аберрации высших порядков (АВП), такой как кома, являющаяся самой распространенной АВП, с которой хирурги хорошо знакомы и имеют способы борьбы с ней, может быть выявлено и отображено в формате, легко понятном клиническим специалистам-практикам. В самом деле, измерение асимметричных аберраций при условии хорошего центрирования или получение любых точек данных, которые не ложатся на круг, или эллипс, или линию с изгибами, будет означать, что есть эффекты, вызванные АВП. Наличие такой асимметрии должно быть нормой, а не исключением, поскольку АВП всегда присутствуют в некоторой степени. Понимание и отделение этих условий от условий сферо-цилиндрической аномалии поможет в оценке практических ограничений для операции. Устранение этих условий позволит лучше понимать, как следует надлежащим образом провести операцию. Это имеет первостепенное значение и в первую очередь отличает описываемое в настоящее время устройство от всех других существующих подходов.
В качестве одного объекта одного варианта осуществления описываемое в настоящее время устройство может быть объединено с другими рефракционными операционными лазерными системами для обеспечения обратной связи об измерении волнового фронта в реальном времени и сопровождения рефракционного хирурга при оптимизации рефракционной процедуры. Например, когда конкретная аберрация высшего порядка имеет особую ориентацию, коррекция некоторых аберраций выявит пространственную зависимость аберрации высших порядков и, при наличии обратной связи об измерении волнового фронта в реальном времени, любые не зарегистрированные другим способом циклодукционные движения глаза, или вращательная децентрация глаза и лазера могут быть зарегистрированы, а ориентация исправлена и подтверждена (на основе дооперационных оценок). В качестве другого примера, известно, что после операции может возникнуть уменьшение контрастной чувствительности из-за внесенных во время процедур коррекции рефракции роговицы (таких как ЛАСИК) аберраций высших порядков. Чтобы минимизировать этот нежелательный и отрицательный результат может использоваться описываемое в настоящее время устройство для обеспечения измерения волнового фронта в реальном времени с частичной компенсацией аберраций высших порядков, позволяя таким образом рефракционному хирургу ясно видеть, остались ли аберрации высших порядков, влияющие на процесс лазерного иссечения, и минимизировать эти аберрации высших порядков.
Описываемое в настоящее время устройство может быть встроено или объединено с другими офтальмологическими устройствами, в том числе для повышения их функциональности. Дополнительно к встраиванию такого устройства в операционный микроскоп для оптимизации рефракционной хирургии катаракты, в качестве другого объекта одного варианта осуществления то же самое устройство может также объединяться со стандартной щелевой лампой для обеспечения как измерения волнового фронта в реальном времени, так и исследования глаза пациента щелевой лампой.
Например, представим, что в операционной в конце оперирования катаракты операционный микроскоп также получает последнее измерение волнового фронта глаза после имплантации ИОЛ. Если есть остаточный астигматизм, хирург может сделать или лимбальный послабляющий разрез (LRI), или роговичный послабляющий разрез (CRI) с обратной связью об измерении волнового фронта в реальном времени для постепенного углубления разреза до достижения желаемой нейтрализации астигматизма. После, когда пациент приходит на повторные осмотры, тот же глаз можно снова исследовать с помощью щелевой лампы, объединенной с датчиком волнового фронта реального времени, как описано здесь. Система, таким образом, будет способна зарегистрировать данные клинического измерения с послеоперационным измерением в операционной в конце процедуры и отследить регрессию со временем. На основе регрессии хирург может рекомендовать операцию «усовершенствования» или опять в операционной, или в клинике на щелевой лампе. Клиническое усовершенствование может осуществляться при сопровождении тем же датчиком волнового фронта реального времени, что был доступен в операционной. Постепенное регулирование процедуры усовершенствования в клинике может осуществляться с непрерывной обратной связью, обеспечивающей лучшие результаты, и с предоставлением врачу конкретной базы данных выполняемых при отслеживании волнового фронта лимбальных послабляющих разрезов (LRI) или роговичных послабляющих разрезов (CRI) и фемтосекундной экстракции лентикулы (Флекси) для дальнейшей коррекции цилиндра.
Другой примерный вариант осуществления включает в себя датчик волнового фронта реального времени, видеокамеру реального времени, компьютер и дисплей, связанный с компьютером. Компьютер способен дать возможность синхронизированной обработки данных, записи, отображения и воспроизведения как записанных данных волнового фронта, так и записанного видеоизображения глаза, и обеспечить свободу управления формой, форматом, передаточной функцией, приложением, выражением, выводом и/или алгоритмом результирующего данного или данными устройства по выбору пользователя.
Другой примерный вариант осуществления включает в себя датчик волнового фронта реального времени, видеокамеру реального времени, компьютер и дисплей, связанный с компьютером. Компьютер способен дать возможность синхронизированной обработки данных, записи, отображения и воспроизведения как записанных данных волнового фронта, так и записанного видеоизображения глаза. Компьютер также связан и управляет управляемым элементом 505 коррекции волнового фронта для коррекции только выбранных компонентов аберрации волнового фронта в виде неплоской волны, чтобы позволить более эффективно обнаружить оставшиеся компоненты аберрации участка волнового фронта в виде неплоской волны.
Описанные выше варианты осуществления могут использоваться во множестве приложений. Например, они могут использоваться в линзметре для измерения и тонкой настройки преломляющей силы линза, включая очковые линзы, контактные линза и/или ИОЛ. Хотя различные варианты осуществления, объединенные идеей настоящего изобретения, были здесь показаны и подробно описаны, специалисты в данной области техники смогут легко разработать множество других измененных вариантов осуществления, все еще объединенных данной идей. Более того, варианты осуществления, такие как, например, признаки, варианты осуществления и зависимые пункты формулы, описанные в связи с заявленным устройством, также применимы к заявленному способу, и наоборот.
Реферат
Группа изобретений относится к области медицины. Устройство визуализации для обеспечения обратной связи с процедурой коррекции зрения включает в себя датчик волнового фронта реального времени для измерения волнового фронта оптического пучка; видеокамеру реального времени, выполняющую сбор по кадрам в реальном времени данных видеоизображений биологического глаза; компьютерную систему, соединенную с датчиком волнового фронта реального времени и видеокамерой реального времени для хранения измеренных аберраций оптического волнового фронта и собранных данных видеоизображений; дисплей, соединенный с компьютерной системой, для одновременного отображения в реальном времени или в режиме воспроизведения аберраций оптического волнового фронта, измеренных в заданное время во время процедуры коррекции зрения, и кадров данных видеоизображений биологического глаза. Способ включает в себя этапы: измерения аберраций оптического волнового фронта от биологического глаза; сбора по кадрам данных видеоизображений биологического глаза; хранения измеренных аберраций оптического волнового фронта и собранных данных видеоизображений; выполнения синхронизации измеренных аберраций оптического волнового фронта и собранных данных видеоизображений и одновременного отображения информации о волновом фронте и кадров видеоизображений биологического глаза. Применение данной группы изобретений позволит каждому пользователю адаптировать операции с данными, собранными или записанными устройством. 2 н. и 41 з.п. ф-лы, 15 ил., 1 табл.
Формула
- датчик волнового фронта реального времени, выполненный с возможностью приема во время процедуры коррекции зрения оптического волнового фронта от биологического глаза для измерения аберраций оптического волнового фронта в реальном времени;
- видеокамеру реального времени, выполненную с возможностью сбора покадрово в реальном времени данных видеоизображений биологического глаза во время процедуры коррекции зрения, в то время как датчик волнового фронта измеряет аберрации оптического волнового фронта, причем видеоизображения фиксируют одно или более состояний биологического глаза, включая выравнивание интраокулярной линзы (IOL) с метками, закрытие века глаза, промывание, пузырьки воздуха, интерферирование на пути света и покрытие слезной пленкой во время процедуры коррекции зрения;
- компьютерная система, соединенная с датчиком волнового фронта реального времени и видеокамерой реального времени, причем компьютерная система выполнена с возможностью хранения измеренных аберраций оптического волнового фронта и собранных данных видеоизображений в реальном времени и с возможностью обеспечения синхронизированной обработки данных, записи, отображения и воспроизведения сохраненных измеренных аберраций оптического волнового фронта и сохраненных данных видеоизображений биологического глаза; и
- дисплей, соединенный с компьютерной системой, для одновременного отображения в реальном времени или в режиме воспроизведения аберраций оптического волнового фронта, измеренных в заданное время во время процедуры коррекции зрения, и кадров данных видеоизображений биологического глаза, собранных в заданное время для обеспечения корреляции аберраций оптического волнового фронта, измеренных в заданное время с одним или более состояниями биологического глаза, включая выравнивание интраокулярной линзы (IOL) с метками, закрытие века глаза, промывание, пузырьки воздуха, интерферирование на пути света и покрытие слезной пленкой во время процедуры коррекции зрения в заданное время.
- и компьютерная система дополнительно сконфигурирована:
- управлять регулируемым элементом коррекции волнового фронта для коррекции только выбранных компонентов аберрации волнового фронта в виде неплоской волны, чтобы более эффективно обнаруживать оставшиеся компоненты аберрации волнового фронта в виде неплоской волны.
- определять и отображать диаграмму, являющуюся наиболее типичным представлением сферических и цилиндрических аномалий рефракции.
- вычислять и показывать на дисплее центрирование, магнитуду или длину, а также направление ориентации угловой оси большой и малой осей наиболее точно подобранного эллипса, который непосредственно указывает на сферические и цилиндрические аномалии рефракции аберраций измеренного оптического волнового фронта.
- отображать одновременно в реальном времени аномалии рефракции в сферо-цилиндрических единицах величин диоптрий и астигматической оси в градусах.
- щелевой ламповый биомикроскоп для обеспечения как измерения волнового фронта в реальном времени, так и исследования глаза пациента методом щелевой микроскопии.
- сопровождать постепенное выполнение хирургом процедуры коррекции зрения в реальном времени для оптимизации результата процедуры коррекции зрения.
- получать/записывать окончательное измерение аберраций оптического волнового фронта от глаза после имплантации ИОЛ до завершения процедуры коррекции зрения по хирургии катаракты для способствования выполнению лимбальных послабляющих разрезов (LRI), или роговичных послабляющих разрезов (CRI), или дугообразных разрезов и, если имеется остаточный астигматизм, для обеспечения обратной связи от волнового фронта в реальном времени для постепенного изменения разреза вплоть до достижения желаемой нейтрализации астигматизма.
- предоставлять врачу определенные базы данных волнового фронта при выполнении лимбальных послабляющих разрезов (LRI), или роговичных послабляющих разрезов (CRI), или дугообразных разрезов и фемтосекундной экстракции лентикулы (Flexi) для дальнейшей коррекции цилиндра.
- отображать в реальном времени, как следует продолжать процедуру коррекции зрения, чтобы способствовать устранению оставшейся аберрации (аберраций);
- подтверждать результаты; и
- документировать величину и направление скомпенсированных аберраций.
- продолжать измерение волнового фронта после имплантации ИОЛ для способствования регулировке положения ИОЛ в оперируемом глазу, пока обратная связь не подтвердит оптимальное размещение ИОЛ.
- предупреждать специалиста, выполняющего коррекцию зрения, идет ли коррекция в правильном или неправильном направлении.
- увеличивать и уменьшать масштаб отображаемой в реальном времени информации, чтобы предупредить специалиста, проводящего коррекцию зрения, идет ли коррекция в правильном или неправильном направлении.
- выделять отображаемую информацию: размер шрифта, толщину, стиль или цвет при достижении требуемого уровня коррекции.
- цифровым способом увеличивать или уменьшать масштаб изображения для усиления или ослабления изображения.
- анализировать результаты рефракции для интраоперационного подтверждения достижения конечной цели коррекции зрения для пациента, такой как эмметропия.
- подтверждать правильность выбора оптической силы ИОЛ для послеоперационных процедур коррекции рефракции роговицы у тех пациентов, для которых дооперационная диагностика зрения ИОЛ не дала удовлетворительных результатов.
- сопровождать центрирование и периферическую угловую ориентацию высококачественной ИОЛ, такой как торическая ИОЛ.
- отображать графическую и/или звуковую информацию, указывающую, в каком направлении нужно перемещать ИОЛ для правильного выравнивания или в каком направлении повернуть торическую линзу для коррекции астигматизма.
- элемент направления пучка, установленный в траектории формирования изображений микроскопа для хирургической процедуры коррекции зрения для проецирования изображения на дисплее на сетчатку глаза хирурга, при этом микроскоп является встроенным в датчик волнового фронта реального времени.
- накладывать данные измерения волнового фронта на изображение оперируемого глаза.
- полупрозрачный микродисплей, установленный в сопряженной плоскости биологического глаза в траектории формирования изображений микроскопа для хирургической процедуры коррекции зрения, при этом микроскоп является встроенным в датчик волнового фронта реального времени;
- динамическая система детектирования волнового фронта;
- при этом компьютерная система дополнительно сконфигурирована:
- отображать выходные данные динамической системы детектирования волнового фронта, так что хирург может реагировать на полученную информацию, не отрывая взгляда от окуляра микроскопа.
- отображать результат измерения аберраций оптического волнового фронта в реальном времени на том же большом экране, что и наложенное изображение, либо рядом, либо отдельно в другом окне дисплея.
- обеспечивать невизуальную обратную связь, такую как звуковой сигнал, для сопровождения осуществления процедуры коррекции зрения хирургом.
- отображать в реальном времени значения диоптрий или графическое представление оптических аберраций; и создавать в реальном времени звуковой сигнал, указывающий на тип аномалии, величину аномалии и изменение аномалии.
- изменять высоту, тон и громкость звукового сигнала в реальном времени, указывая на улучшение или ухудшение применяемой коррекции во время процедуры коррекции зрения.
- создавать в реальном времени звуковой сигнал заданной высоты, указывающей на то, что аберрация является цилиндрической, причем тон укажет на магнитуду аномалии.
- определять, имеет ли имплантированная мультифокальная ИОЛ желаемый диапазон фокусировки, дополнительно к оптимизации ее положения.
- проводить калибровочное измерение аберраций оптического волнового фронта.
- измерять, может ли имплантированная аккомодационная интраокулярная линза (АИОЛ) обеспечить желаемый диапазон аккомодации.
- определять диапазон компенсации дефокуса, который может быть применен, на основании обратной связи в реальном времени об измерении аберраций оптического волнового фронта.
- подтверждать состояние афакии биологического глаза на всей видимой области роговицы, динамически меняя размер кольца выборки датчика волнового фронта.
- динамически менять размер кольца выборки датчика волнового фронта.
- измерения в реальном времени во время процедуры коррекции зрения аберраций оптического волнового фронта от биологического глаза датчиком волнового фронта реального времени;
- сбора покадрово в реальном времени данных видеоизображений биологического глаза видеокамерой реального времени во время процедуры коррекции зрения, в то время как датчик волнового фронта измеряет аберрации оптического волнового фронта, причем видеоизображения фиксируют одно или более состояний биологического глаза, включая выравнивание интраокулярной линзы (IOL) с метками, закрытие века глаза, промывание, пузырьки воздуха, интерферирование на пути света и покрытие слезной пленкой во время процедуры коррекции зрения;
- хранение с использованием компьютерной системы измеренных аберраций оптического волнового фронта и собранных данных видеоизображений в реальном времени;
- выполнение синхронизации с использованием компьютера измеренных аберраций оптического волнового фронта и собранных данных видеоизображений в реальном времени; и
- одновременное отображение с использованием компьютера в реальном времени или в режиме воспроизведения аберраций оптического волнового фронта, измеренных в заданное время во время процедуры коррекции зрения, и кадров данных видеоизображений биологического глаза, собранных в заданное время во время процедуры коррекции зрения для обеспечения корреляции аберраций оптического волнового фронта, измеренных в заданное время с одним или более состояниями биологического глаза, включая выравнивание интраокулярной линзы (IOL) с метками, закрытие века глаза, промывание, пузырьки воздуха, интерферирование на пути света и покрытие слезной пленкой во время процедуры коррекции зрения в заданное время.
Комментарии