Трехосный электростатический акселерометр - SU1346058A3
Код документа: SU1346058A3
Чертежи



Описание
Изобретение относится к приборостроению , а именно к конструкции трехосного компенсационного акселерометра с электростатическими обратным преобразователями силы и подвесом чувствительного элемента (инерционной массы).
Целью изобретения является увеличение верхней границы диапазона измеряемых ускорений.
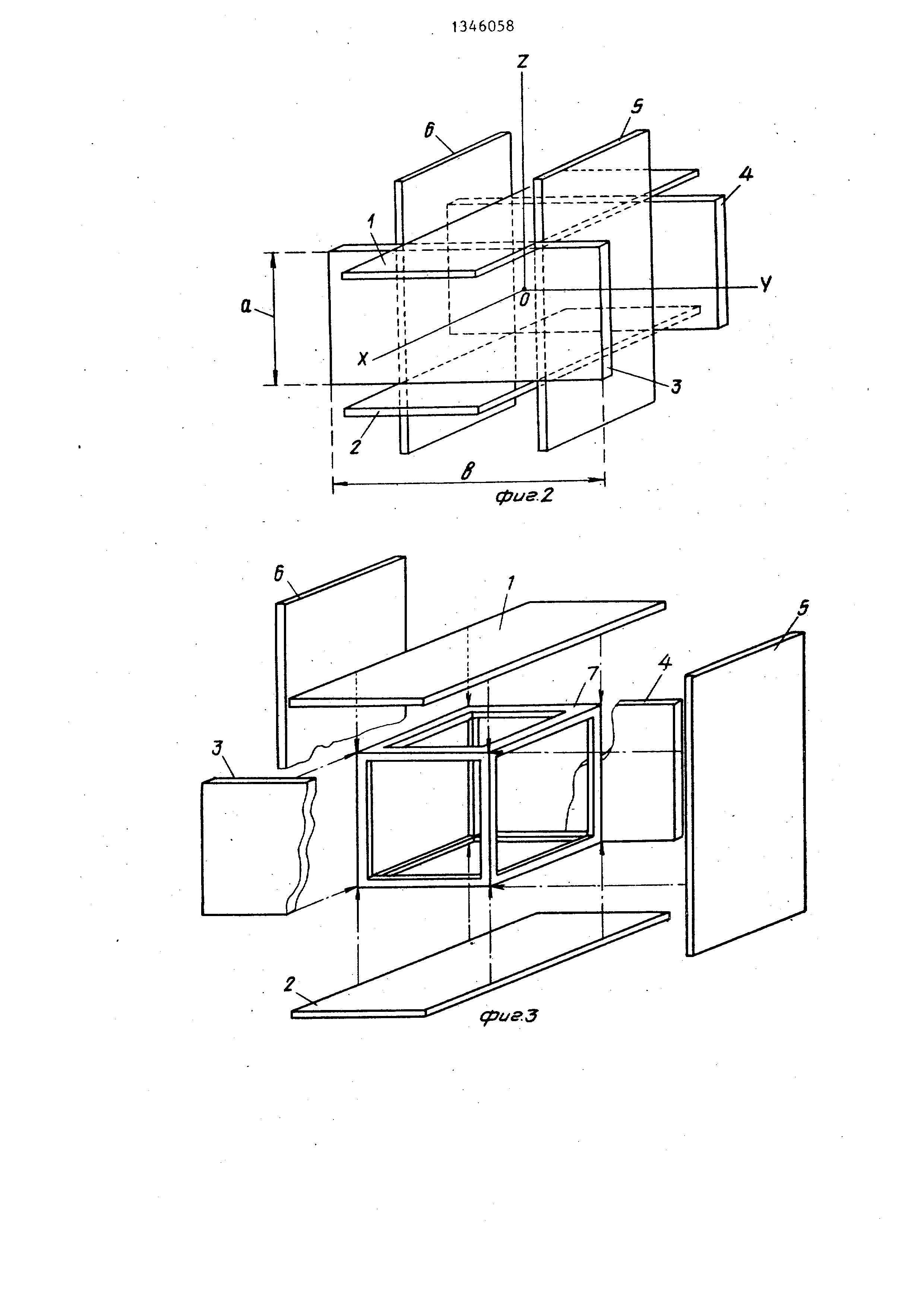
На фиг. 1 показан предлагаемый акселерометр, общий вид; на фиг.2 - первый вариант конструкции чувствительного элемента акселерометра; на фиг. 3 - то же, второй вариант; на фиг. 4 - сечение акселерометра пхюс- костью XOZ (фиг. 1); на фиг. 5 - то же, плоскостью YOZ (фиг. 1); на фиг. 6 - вид электродной пластины; на фиг. 7 - электрическая блок-схема одного контура компенсации акселерометра .
Трехосный электростатический акселерометр состоит из корпуса и расположенного в корпусе с возможностью перемещения относительно него чувствительного элемента (инерционной массы). Чувствительный элемент
акселерометра имеет два варианта кон- 30 между соответствующими электродами 2130 корпуса и инерционной массой. Для снижения термочувствительности акселерометра поперечины 14-19 изготавливают из материала инерционной массы или другого имеющего такой же коэффициент температурного расширения материала .
35
струкции.
Чувствительный элемент по первому варианту состоит из шести одинаковых прямоугольных пластин (фиг. 2), расположенных с образованием трех пар параллельных и отстоящих одна от другой на некотором расстоянии пластин 1 и2, Зи4, 5и6. Плоскости пар пластин , взаимно перпендикулярны, средние части пластин, собранных в JQ чувствительный элемент, образуют куб, а выступающие за поверхность куба концы пластин - крылья. Пластины чувствительного элемента могут быть выполнены из легких
Каждая электродная пластина, например пластина 9 (фиг. 6), помимо активных электродов 23 и 24, которые одновременно служат для емкостного определения положения чувствительного элемента акселерометра и для созда45 ния электростатических сил обратного преобразователя и подвеса чувствительного элемента, имеет боковые металлизированные поверхности 31, нижнюю металлизированную поверхность 32,
сплавов алюминия, бериллия, магния, титана и соединены между собой лазерной сваркой.
Чувствительный элемент по второму варианту также состоит из шести одинаковых прямоугольных пластин (фиг.З), расположенных аналогично пластинам в первом варианте конструкции, однако пластины соединены в чувствительном элементе посредствоь кубического каркаса 7. По второму варианту пластины выполняют из изолирующего материала (оксид кремния, керамика) с металлизированной поверхностью и наклеивают на кубический каркас.
Корпус акселерометра состоит из трех пар электродных пластин 8 и 9, 10и11, 12и13 (фиг. 1), соединен, ных попарно поперечинами 14-19. Пластины 8 и 9 соединены в пару поперечинами 14 и 15, пластины 10 и 11 - перечинами 16 и 17, а пластины 12 и 13 - поперечинами 18 и 19 (фиг.1,4 и 5). Пластины 8-13 с поперечинами 14-19 вставлены одна в другую вокруг инерционной массы и укреплены друг
g относительно друга при помощи крепежной детали 20 (фиг. 1). Собранный узел прибора установлен внутрь герметичного кожуха.
На каждой паре электродных плас2Q тин 8-13 расположена система из четырех активных электродов: на пластинах 8 и 9 - электродь 21-24 (фиг.4 и 5); на пластинах 10 и 11 - электроды 25 и 26 и еще два электрода.(на
25 ЧФИГ.4 не показанных); на пластинах 12 и 13 - электроды 27 - 30 (фиг. 5) Поперечины 14-19 выполняют функци калиброванных регулировочных прокладок для фиксации расстояний d и dj
35
JQ
JQ
Каждая электродная пластина, например пластина 9 (фиг. 6), помимо активных электродов 23 и 24, которые одновременно служат для емкостного определения положения чувствительного элемента акселерометра и для созда45 ния электростатических сил обратного преобразователя и подвеса чувствительного элемента, имеет боковые металлизированные поверхности 31, нижнюю металлизированную поверхность 32,
50 упоры 33, которые препятствуют соприкосновению инерционной массы с активными электродами.
Проводящая поверхность 31 имеет тот же потенциал, что и инерционная
5g масса, и выполняет функции экрана для устранения посторонних электростатических притяжений к другим не относящимся к активным электродам прово- ДГ1ЩИМ поверхностям.
Проводящая поверхность 32 доведена до эталонного потенциала, .с тем чтобы свести до минимума действие паразитных емкостей при емкостном определении положения чувствительного элемента прибора.
Электродные пластины 8-13 изготовлены из изолирующего материала (оксид кремния, глинозем). Металлизация активных электродов и других проводящих поверхностей осуществлена путем напьтения в вакууме. Электроды и проводящие поверхности отделены пазами , образованными при помощи ультразвука .
Механические упоры 33 имеют высоту порядка 20 мкм и получены методом щелкографии.
Трехосный электростатический акселерометр имеет три идентичных контура компенсации, каждый из которых, например по оси OZ и по углу у, состоит (фиг. 7) из генератора ЗА переменного тока и источника 35 постоянного тока, соединенных соответственно через емкость и резистор посредством гибкого проводника 36 с инерционной массой. Кроме того, в состав контура компенсации входят четыре трансформатора 37-40, два предварительных усилителя 41 и 42, два фазочувстви- тельных выпрямителя 43 и 44, а также суммирующе-вычитающее устройство 45, корректирующие блоки 46 и 47 и выходной усилительный блок 48.
Предлагаемый трехосный электростатический акселерометр измеряет шесть компонент движения корпуса прибора: три проекции вектора линейного ускорения на оси ОХ, OY, OZ и три проекции вектора углового ускорения на эти же оси.
Поскольку работа акселерометра по всем трем каналам измерения компонент линейного ускорения аналогична и совпадает по трем каналам измерения компонент углового ускорения, рассмотрим ее на примере измерения линейного ускорения , направленного по оси OZ,
и углового ускорения вокруг оси OY. I
При наличии указанных компонент ускорения инерционная масса перемещается по оси OZ и одновременно вращается вокруг оси OY. Пластины 1 и 2 инерционной массы в схеме контура компенсации образуют с электродами 21 24 два дифференциальных емкостных датчика линейного и углового положений инерционной массы относительно корпуса акселерометра. Сигналы с этих дифференциальных датчиков усиливаются , выпрямляются и с помощью сумми - рующе-вычитающего устройства разделяются на две составляющие: S,, пропорциональную смещению инерционной массы по оси OZ, и Sj, пропорциональную углу поворота инерционной массы вокруг оси OY.
Сигналы S и S преобразуются корректирующими блоками 6 напряжений и и Uj., пропорциональных линейному
5 ускорению по оси OZ и угловому ускорению вокруг оси OY соответственно. Напряжения U- и U, являются выходными сигналами акселерометра. Кроме того , напряжения U и U. преобразуются
0 и усиливаются выходным усилительным блоком, который формирует напряжения и , Uj, и. и и. Эти напряжения подают на активные электроды 21-24 для компенсации инерционной силы и инер5 ционного момента, действующих на инерционную массу.
Как известно, в дифференциальном электростатическом обратном преобразователе силы
- ,
где F - электростатическая сила;
С - емкость конденсатора, образованного электродами преобразователя;
е - смещение центрального электрода преобразователя из нейтрального положения; и - напряжение между электродами. Но (Е - диэлектрическая проницаемость среды между электродами), следовательно, , а
215
В компенсационном акселерометре с электростатическим обратным преобразователем силы электростатическая сила F уравновешивает инерционную силу та (т - масса чувствительного элемента; а - измеряемое ускорение), поэтому
,
0
5
0
5
0
55
а следовательно,
т,2 2е2 m
TI , - „
Е S
Поскольку предлагаемый акселерометр имеет большее отношение S/m по сравнению с прототипом, то при
данном максимальном напряжении U между электродами обратного преобразователя силы он способен измерять большее максимальное ускорение, чем прототип. Таким образом достигается увеличение верхней границы диапазона измеряемых прибором ускорений. Если увеличения максимального измеряемого ускорения не требуется,, то при данном максимальном измеряемом ускорени предлагаемый акселерометр позволяет снизить рабочее напряжение в электростатическом обратном преобразователе силы.
Формула изобретения
1. Трехосный электростатический акселерометр, содержащий корпус и расположенную в корпусе с возможностью перемещения относительно него инерционную массу, электрически соединенную с корпусом гибким проводником и образованную плоскими прямоугольными одинаковыми пластинами, соединенными между собой и расположенными в трех ортогональных плоскостях, а также двенадцать укрепленных в корпусе изолированных от него плоских электро- дов, расположенных по четыре в тех же трех ортогональных плоскостях, кото
5
о 5 о
рые образуют двенадцать электрических конденсаторов с поверхностями инерционной массы, и блок трех контуров компенсации, электрически соединенных с инерционной массой и электродами корпуса, отличающийся тем, что, с целью увеличения верхней границы диапазона измеряемых ускорений , инерционная масса образована шестью пластинами с проводящими поверхностями , соединенными между собой и образующими внутренний объем, ограниченный этими пластинами, представляющий собой куб со стороной, меньшей длины пластины и равной ее ширине, центральная часть каждой пластины образует одну сторону куба, а две боковые части каждой пластины образуют одинаковые плоские выступы, при этом электроды корпуса укреплены попарно напротив пластин инерционной массы, а каждый электрод образует электрический конденсатор с расположенными напротив соответствующим плоским выступом пластины инерционной массы и с половиной поверхности центральной части этой же пластины.
2. Акселерометр по п. 1, о т л и- чающийся тем, что пластины инерционной массы укреплены на кубическом каркасе.
20
cpue.l
фиг.2


Реферат
Изобретение относится к компенсационным акселерометрам с электростатическими обратными преобразователями силы и подвесом чувствительного элемента. Цель изобретения - увеличение верхней границы диапазона измеряемых ускорений. В устр-ве инерционная масса образована шестью пластинами с проводящими поверхностями. Центральные части пластин образуют куб, а две боковые части каждой пластины образуют одинаковые плоские выступы, составляющие с электродами корпуса электрические конденсаторы- датчики линейного и углового положения инерционной массы При наличии ускорения сигналы с датчиков преобразуются корректирующими блоками в напряжения , пропорциональные линейному и угловому ускорениям и являющиеся выходными сигналами акселерометра. Пластины могут быть укреплены на кубическом каркасе. 1 з.п, ф-лы, 7 ил. С Q СО с 00 4 05 О сл СХ) см

Формула
Комментарии