Способ и устройство устранения залипания электродов в инерциальных микроэлектромеханических системах - RU2542590C2
Код документа: RU2542590C2
Чертежи



Описание
1. ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области инерциальных микроэлектромеханических систем (далее "инерциальные устройства МЭМС"), используемых в качестве датчиков перегрузок, таких как, например, акселерометры или гироскопы.
Более конкретно, изобретение относится к способу устранения запинания микроповерхностей, обращенных друг к другу, таких как проводящие электроды в инерциальных устройствах МЭМС.
В особенности изобретение может применяться в инерциальных устройствах МЭМС, содержащих проводящие электроды, которые снабжены проводящими выступами, хотя их применение не ограничивается лишь указанными конструкциями.
2. ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Устройства МЭМС представляют собой микроминиатюрные системы в интегральном исполнении, в которых используются механические и электрические компоненты, размеры которых могут составлять от нескольких микрон до нескольких миллиметров.
Критической проблемой производства и применения инерциальных устройств МЭМС является трудность контроля сил, действующих на поверхности внутри этих устройств. В частности, такой нежелательный эффект, как залипание двух микроповерхностей, обращенных друг к другу, часто ограничивает область применения и сокращает срок службы таких устройств.
Как известно, эффект залипания возникает, когда силы сцепления поверхностей (или силы трения покоя) превышают механические силы, возвращающие микроповерхности в исходное положение.
Следует добавить, что в результате уменьшения размеров микроструктур устройств МЭМС за последние годы эффект залипания поверхностей стал проявляться в большей степени.
Хорошо известной проблемой является залипание при использовании, которое проявляется в процессе работы инерциальных устройств МЭМС, когда микроповерхности, такие как проводящие электроды, соприкасаются и слипаются друг с другом, в результате чего устройство МЭМС теряет работоспособность. Залипание поверхностей в процессе работы может быть вызвано следующими силами сцепления: капиллярными, электростатическими (или силами Ван-дер-Ваальса) и силами химических связей. Эти силы прилипания существенно зависят от природы используемых материалов в инерциальном устройстве МЭМС, геометрической формы поверхностей и способа их обработки.
Конструкция одного из таких инерциальных устройств МЭМС, представленная на фигуре 1, содержит подвижную массу 150 с одним подвижным электродом, подвешенную в каркасе (не показан) с помощью пружинного устройства 115, причем подвижный электрод содержит несколько проводящих выступов 155. Кроме того, инерциальное устройство МЭМС содержит две группы неподвижных электродов 120а, 120b, жестко прикрепленных к каркасу, каждый из которых имеет по два проводящих выступа 125а, 125b. Каждый проводящий выступ 125а, 125b проходит рядом с одним из подвижных выступов 155, формируя пару проводящих выступов, между которыми имеется соответствующая емкость, изменяющаяся при движении подвижной массы вдоль измерительной оси 130.
Термин "пружинное устройство", как оно используется в настоящем описании, означает любое средство упругого соединения подвижной массы с каркасом.
Техническая задача снижения вероятности залипания выступов в процессе работы инерциального устройства МЭМС хорошо известна специалистам, и для ее решения было предложено несколько способов.
Один из способов состоит в увеличении возвращающей силы пружин 115 путем повышения жесткости пружин и/или амплитуды движения подвижной массы. Однако для достижения повышенной жесткости пружин разработчики инерциальных устройств МЭМС вынуждены использовать более массивные пружины, что приводит к увеличению размеров этих устройств. Кроме того, при повышении жесткости пружин снижается чувствительность инерциального устройства МЭМС и, соответственно, отношение сигнал/шум.
Более того, в инерциальных устройствах МЭМС с повышенной жесткостью пружин в процессе их работы залипание поверхностей продолжает возникать.
Другой способ связан со снижением сил прилипания за счет использования на поверхностях проводящих выступов, которые могут соприкасаться, подходящих покрытий из материалов с низкой поверхностной энергией и/или материалов с шероховатой поверхностью.
Однако покрытия с низкой поверхностной энергией требуют использования процесса обработки, который имеет хорошо известные недостатки, связанные с его сложностью и увеличением затрат на изготовление МЭМС-изделий.
Кроме того, даже если на поверхности проводящих выступов нанесены покрытия, снижающие прилипание, проблема полностью не решается.
Таким образом, недостаток вышеуказанных способов заключается в том, что они недостаточно эффективны, поскольку не обеспечивают полное устранение проблемы залипания поверхностей устройств МЭМС в процессе работы. Поэтому пользователь не может быть полностью уверен в постоянной работоспособности инерциального устройства МЭМС.
Для устранения указанного недостатка общераспространенной практикой является использование механического воздействия ударного характера на устройство МЭМС в направлении его измерительной оси, например, с помощью вибрационной системы для увеличения возвращающей силы пружин, чтобы суммарная возвращающая сила превышала силы прилипания. Такой способ может усложнять конструкцию и влечет за собой увеличение стоимости изделий.
Третий способ, раскрытый в патентном документе US 2007/075942, содержит подачу определенного напряжения между проводящими электродами устройства МЭМС для создания электростатической силы, обеспечивающей смещение подвижной массы в направлении, противоположном направлению действия силы прилипания, что позволяет разделить залипшие проводящие электроды.
3. ЦЕЛИ ИЗОБРЕТЕНИЯ
Целью изобретения по меньшей мере в одном варианте его осуществления является устранение вышеуказанного недостатка известных технических решений.
Более конкретно, целью по меньшей мере одного варианта осуществления изобретения является создание способа, обеспечивающего устранение нежелательных эффектов залипания проводящих выступов (или в более общей формулировке проводящих электродов) внутри инерциального устройства МЭМС.
По меньшей мере один вариант осуществления изобретения также относится к такому способу, который недорог и прост в реализации.
Еще одной целью по меньшей мере одного варианта осуществления изобретения является создание способа, включающего исключительно такие средства, которые обычно используются внутри инерциальных устройств МЭМС.
4. КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном из вариантов осуществления изобретения предлагается способ устранения залипания электродов в инерциальном микроэлектромеханическом (МЭМС) устройстве, содержащем:
подвижную массу, подвешенную на каркасе с помощью пружинного устройства и содержащую по меньшей мере один подвижный электрод; и
по меньшей мере один неподвижный электрод, жестко прикрепленный к каркасу, причем каждый неподвижный электрод взаимодействует с одним подвижным электродом, в результате чего формируется пара электродов; причем способ отличается тем, что он включает:
обнаружение по меньшей мере одной пары залипших электродов, для которых слипание характеризуется силой прилипания; и
по меньшей мере одну стадию разделения, включающую подачу в течение заданного интервала времени заданного напряжения между электродами по меньшей мере одной пары электродов для создания электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы прилипания.
Основная идея способа, предлагаемого в настоящем изобретении, заключается в том, что после обнаружения залипания электродов инерциального устройства МЭМС на них в течение заданного интервала времени подается заданное напряжение, которое обеспечивает перемещение подвижной массы в направлении действия силы прилипания для сжатия электродов пары (или пар). Таким образом, после прекращения подачи заданного напряжения создаваемая электростатическая сила исчезает, в результате чего возникают возвращающие силы, которые эффективно смещают подвижную массу в направлении, противоположном направлению действия силы прилипания, для обеспечения разделения залипших электродов. Электростатические силы, действующие на слипшиеся электроды, можно сравнить с натягиванием тетивы лука, в результате чего происходит накопление энергии, которая передается стреле после отпускания тетивы.
Таким образом, предлагаемая в настоящем изобретении подача напряжения для устранения залипания электродов обеспечивает эффективный способ устранения залипания электродов, в котором используются средства, уже имеющиеся в инерциальных устройствах МЭМС, и поэтому способ прост для реализации и достаточно дешев.
Если же разделение залипших электродов после однократного применения предлагаемого способа не происходит, то можно будет повторить процесс столько раз, сколько это будет необходимо, в конце концов, для разделения электродов.
Следует отметить, что посредством простого измерения разности емкостей (между первой емкостью по меньшей мере одной пары электродов, соответствующей смещению подвижной массы в первом направлении, и второй емкостью по меньшей мере одной пары электродов, соответствующей смещению подвижной массы во втором направлении) можно обнаружить залипание электродов, причем знак разности емкостей указывает направление, в котором произошло залипание. Поэтому соответствующий процесс устранения залипания электродов может быть выполнен в зависимости от обнаруженного направления залипания.
В предпочтительных вариантах устройство МЭМС содержит по меньшей мере для одной из указанных пар электродов по меньшей мере один ограничитель-упор, прикрепленный к одному электроду указанной по меньшей мере одной пары электродов и проходящий в направлении другого электрода указанной по меньшей мере одной пары электродов для ограничения поверхности контакта электродов.
Такой ограничитель-упор для электродов залипшей пары электродов имеет поверхность с низкой энергией, в результате чего вероятность устранения залипания электродов повышается.
В гипотетическом случае, когда залипли все пары электродов, на которые подается заданное напряжение, наличие одного или нескольких ограничителей-упоров на неподвижном и/или подвижном электроде все-таки не мешает созданию электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы залипания, чтобы разделить электроды всех или части пар залипших электродов. Ограничитель-упор имеет очень низкую электропроводность, в результате чего предотвращается возможность короткого замыкания пары электродов, когда они слипаются. Кроме того, имеется разброс размеров ограничителей-упоров, который не позволяет получить ограничители-упоры одинаковых размеров на группе пар электродов в устройстве МЭМС. Поэтому даже в указанном гипотетическом случае может обеспечиваться создание эффекта натягивания тетивы лука.
В предпочтительных вариантах после истечения заданного интервала времени заданное напряжение выключается в течение интервала времени выключения, так что отношение интервала времени выключения напряжения к времени отклика системы подвижная масса - пружины меньше или равно 10%.
Таким образом, обеспечивается действие положительного "эффекта тетивы лука", в результате чего повышается вероятность устранения залипания электродов.
В предпочтительных вариантах по меньшей мере один подвижный электрод содержит множество подвижных выступов, и указанный по меньшей мере один неподвижный электрод содержит множество неподвижных выступов, каждый из которых взаимодействует с одним подвижным выступом, формируя пару выступов, имеющих некоторую емкость, причем каждый подвижный выступ может перемещаться относительного одного неподвижного выступа под действием ускорения, в результате чего емкость изменяется, и заданное напряжение подается между выступами по меньшей мере одной пары выступов для создания электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы прилипания.
В предпочтительных вариантах устройство МЭМС содержит по меньшей мере для одной из указанных пар выступов по меньшей мере один ограничитель-упор, прикрепленный к одному выступу указанной по меньшей мере одной пары выступов и проходящий в направлении другого выступа указанной по меньшей мере одной пары выступов для ограничения поверхности контакта этих выступов. Следует отметить, что для выступов, имеющих поверхность с низкой энергией, благодаря наличию такого ограничителя-упора эффект тетивы лука оптимизируется.
На практике это выступы незалипших пар выступов, которые обеспечивают возможность создания эффекта тетивы лука. В гипотетическом случае, если залипли все пары выступов, то наличие одного или нескольких ограничителей-упоров на неподвижном и/или подвижном выступе все-таки не мешает созданию электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы залипания, чтобы разделить выступы всех или части пар залипших выступов. С одной стороны, ограничитель-упор имеет очень низкую электропроводность, в результате чего предотвращается возможность короткого замыкания пары выступов, когда они слипаются. С другой стороны, имеется разброс размеров ограничителей-упоров, который не позволяет получить ограничители-упоры одинаковых размеров на группе пар выступов в устройстве МЭМС. Эта же аргументация справедлива в отношении разброса расстояний между подвижными и неподвижными выступами группы пар выступов в устройстве МЭМС. Таким образом, вероятность залипания всех пар выступов очень мала.
В другом варианте осуществления изобретения предлагается компьютерный программный продукт, содержащий команды кода программы, для осуществления вышеописанного способа (любого его варианта), когда программа выполняется компьютером.
В другом варианте осуществления изобретения предлагается машиночитаемый носитель для хранения компьютерной программы, содержащей набор команд, которые могут быть выполнены компьютером для осуществления вышеописанного способа (любого его варианта).
В другом варианте осуществления изобретения предлагается устройство устранения залипания электродов, предназначенное для взаимодействия с инерциальным микроэлектромеханическим устройством, содержащим:
подвижную массу, подвешенную на каркасе с помощью пружинного устройства и содержащую по меньшей мере один подвижный электрод; и
по меньшей мере один неподвижный электрод, жестко прикрепленный к каркасу, причем каждый неподвижный электрод взаимодействует с одним подвижным электродом, в результате чего формируется пара электродов; причем устройство устранения залипания электродов отличается тем, что оно содержит:
средство обнаружения по меньшей мере одной пары залипших электродов, для которых слипание характеризуется силой прилипания;
средство подачи в течение заданного интервала времени заданного напряжения между электродами по меньшей мере одной пары электродов для создания электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы прилипания.
5. КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и достоинства изобретения станут более понятными из нижеприведенного описания иллюстративного неограничивающего варианта и из прилагаемых чертежей, на которых показано:
фигура 1 - схематический вид известной конструкции инерциального устройства МЭМС (уже упоминалась выше), в которой может быть применен способ устранения залипания электродов по настоящему изобретению;
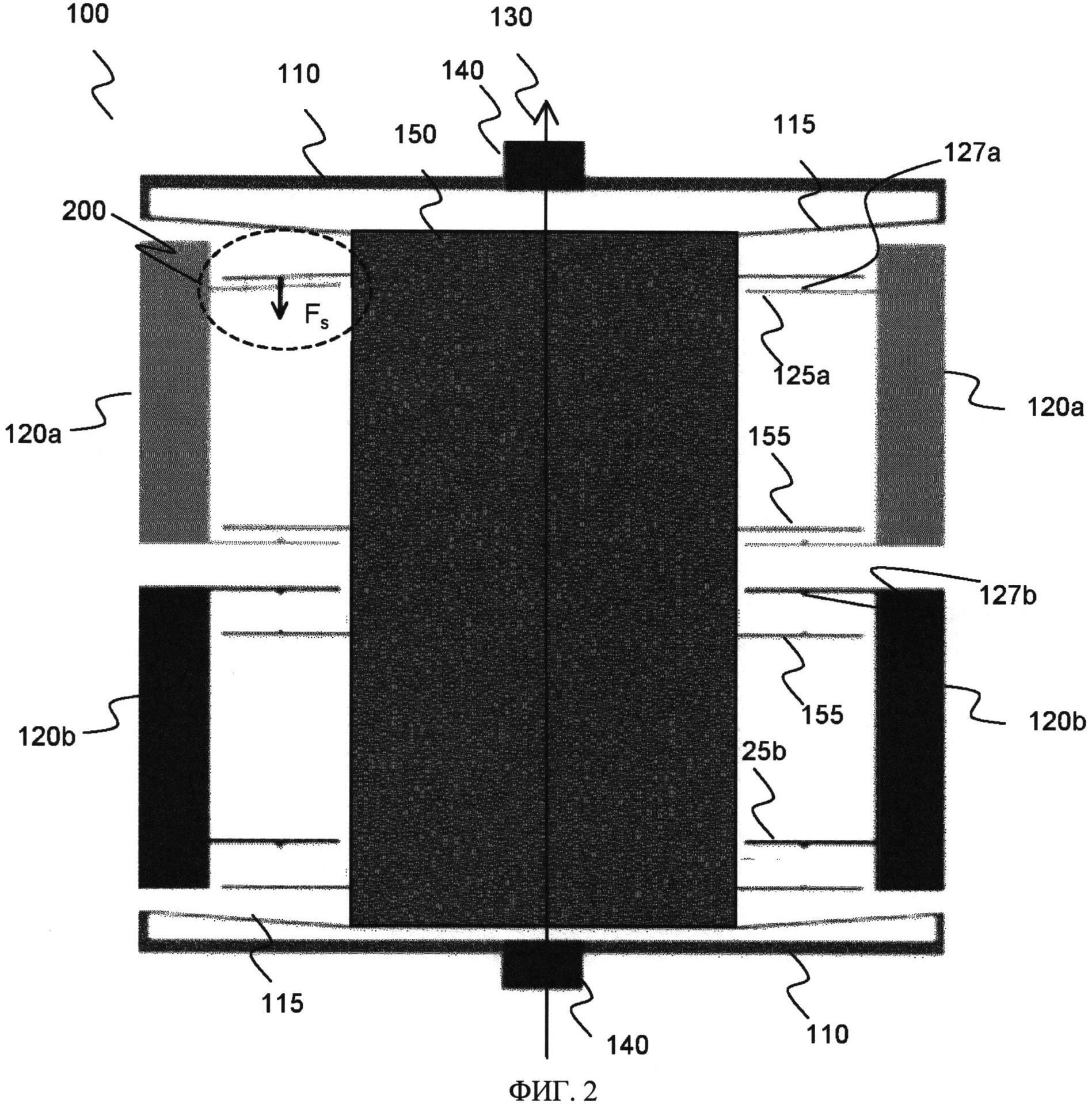
фигура 2 - вид инерциального устройства МЭМС фигуры 1 с залипшими электродами;
фигуры 3а и 3b - иллюстрации принципа действия способа устранения залипания электродов по одному из вариантов осуществления изобретения для инерциального устройства МЭМС фигуры 2;
фигура 4 - структурная схема устройства устранения залипания электродов, в котором реализуется способ, предлагаемый в настоящем изобретении.
6. ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На всех чертежах настоящего документа одинаковые элементы и стадии указываются одинаковыми ссылочными номерами.
На фигурах 1, 2, 3а и 3b, которые будут описаны ниже, представлен схематический вариант конструкции инерциального устройства МЭМС, в котором осуществляется способ устранения залипания электродов по одному из вариантов настоящего изобретения. Такое устройство содержит одну подвижную массу, подвешенную в каркасе с помощью пружинного устройства и снабженную одним подвижным электродом, и несколько неподвижных электродов. Подвижный электрод имеет несколько подвижных проводящих выступов, и каждый неподвижный электрод имеет несколько неподвижных проводящих выступов, каждый из которых расположен перед одним соответствующим подвижным выступом и параллелен ему, формируя пару взаимодействующих проводящих выступов. Следует понимать, что инерциальное устройство МЭМС, в котором может быть применено настоящее изобретение, может иметь проводящие электроды без выступов, и иллюстративный пример, подробно рассмотренный в настоящем описании, может быть адаптирован соответствующим образом для такого случая. В особенности описанный ниже способ устранения залипания электродов подходит для разделения проводящих выступов (рассматриваемых в качестве проводящих электродов), однако в более общем случае способ может быть применен к отдельным проводящим электродам, не имеющим проводящих выступов.
На фигуре 1, уже упомянутой выше в связи с известными техническими решениями, приведен схематический вид известной конструкции инерциального устройства 100 МЭМС, в которой может быть применен способ устранения залипания электродов по одному из вариантов осуществления настоящего изобретения. Инерциальное устройство 100 МЭМС содержит следующие элементы:
каркас (на фигуре 1 не показан), к которому прикреплены неподвижные держатели 110 и крепежные средства 140;
подвижную массу 150, формирующую подвижный электрод, который подвешен на неподвижных держателях 110 с помощью пружин 115 и снабжен несколькими проводящими выступами 155;
первую группу неподвижных электродов 120а, жестко прикрепленных к каркасу, каждый из которых содержит по два проводящих выступа 125а, взаимодействующих с выступами 155 подвижной массы, с формированием пар выступов (125а, 155), используемых для перемещения вниз подвижной массы 150 вдоль измерительной оси 130;
вторую группу неподвижных электродов 120b, жестко прикрепленных к каркасу, каждый из которых содержит по два проводящих выступа 125b, взаимодействующих с выступами 155 подвижной массы, с формированием пар выступов (125b, 155), используемых для перемещения вверх подвижной массы 150 вдоль измерительной оси 130.
Подвижная масса 150, то есть подвижный электрод и его выступы, каркас и две группы неподвижных электродов с их выступами, а также пружины изготовлены способом микромеханической обработки в полупроводниковой пластинке (например, в пластинке из кремния) с использованием обычных технологий, применяемых в микроэлектронике.
Подвижный электрод электрически изолирован от неподвижных электродов. Каждая пара выступов устройства 100 МЭМС имеет переменную емкость, которая используется для измерения смещений подвижной массы 150 и для управления ее перемещениями по измерительной оси 130 путем подачи заданного напряжения.
Таким образом, подвижный электрод и неподвижные электроды в парах выступов выполняют две функции:
определение положения подвижной массы 150 относительно каркаса путем измерения изменений емкости пар выступов;
возбуждение электростатических сил, которые обеспечивают перемещение подвижной массы 150 вверх или вниз по измерительной оси с помощью группы неподвижных электродов 120а или 120b, на которые подается напряжение (например, в диапазоне от 1 В до 10 В) относительно подвижного электрода. Такое устройство 100 МЭМС может работать вместе с системой обратной связи (на фигуре 1 не показана), которая обеспечивает возможность возврата подвижной массы в положение покоя после измерения ее смещения. Например, смещение подвижной массы может произойти в результате ускорения, вызванного сейсмическим толчком, действующим на устройство МЭМС, такое как акселерометр. Электростатические силы обратной связи, действующие на подвижную массу в результате подачи напряжения между подвижным электродом и неподвижными электродами, компенсируют ускорение, вызванное сейсмическим толчком, путем перемещения подвижной массы снова в положение покоя.
В одном из вариантов осуществления изобретения каждый выступ 125а, 125b неподвижных электродов снабжен упором-ограничителем 127а, 127b, который проходит в паре выступов в направлении выступа подвижной массы. Эти упоры-ограничители ограничивают поверхность контакта между выступом неподвижного электрода и выступом подвижной массы каждой пары выступов для уменьшения вероятности залипания выступов устройства МЭМС.
Необходимо иметь в виду, что количество неподвижных электродов и выступов, показанных на фигуре 1 (а также на фигурах 2, 3а и 3b), сознательно ограничено, чтобы не перегружать фигуру и ее описание.
На фигуре 2 иллюстрируется вид инерциального устройства МЭМС фигуры 1 с залипшими электродами;
В отличие от примера, представленного на фигуре 1, где подвижная масса находится в состоянии покоя (поскольку пружины 115 не деформированы), подвижная масса на фигуре 2 находится в положении контакта (поскольку пружины деформированы). Деформация пружин происходит в результате возникновения залипания пары выступов 200, расположенных вверху слева в устройства МЭМС.
Обнаружение залипания выступов предложенного способа осуществляется путем измерения разности емкостей (ниже указывается как ΔС). Как показано на фигуре 1 слева от измерительной оси 130, определяются две переменные емкости:
первая переменная емкость С1, которая представляет среднюю емкость по всем парам выступов (125а, 155), используемых для перемещения подвижной массы 150 вниз вдоль измерительной оси 130; и
вторая переменная емкость С2, которая представляет среднюю емкость по всем парам выступов (125b, 155), используемых для перемещения подвижной массы 150 вверх вдоль измерительной оси 130.
В случае залипания выступов (например, залипания пары выступов, указанных ссылочным номером 200 на фигуре 2) подвижная масса 150 удалена от своего положения покоя, и между первой и второй переменными емкостями может быть обнаружена и определена с помощью электронных средств разность емкостей, ΔС=С1-С2. Поскольку можно определить знак этой разности ΔС емкостей, то затем можно определить направление, в котором происходит залипание выступов (вверх или вниз по измерительной оси 130), и, соответственно, осуществить процесс устранения залипания в зависимости от направления залипания.
Следует иметь в виду, что в случае залипания выступов подвижная масса находится в положении контакта независимо от того, находится ли устройство МЭМС в состоянии покоя или в активном состоянии.
Залипание выступов определяется силой прилипания (указана как Fs), направленной вниз по оси, параллельной измерительной оси 130а, что заставляет подвижную массу 150 оставаться в нижнем положении. Деформация четырех пружин 115, возникающая в результате этого залипания, создает возвращающую силу Fr, действующую в направлении, противоположном направлению действия силы прилипания. Как правило, эта возвращающая сила превышает силу прилипания, и в этом случае подвижная масса 150 возвращается в положение покоя. В данном случае, поскольку возвращающая сила меньше силы прилипания, подвижная масса 150 остается в положении контакта (залипания выступов, в данном случае), и это может привести к неработоспособности устройства МЭМС.
На фигурах 3а и 3b иллюстрируется принцип действия способа устранения залипания электродов по одному из вариантов осуществления изобретения для инерциального устройства МЭМС фигуры 2. На фигурах 3а и 3b иллюстрируются первая и вторая стадии, соответственно, этого способа устранения залипания выступов.
В рассматриваемом варианте осуществления изобретения в способе разделения выступов используется эффект натягивания тетивы лука. Этот процесс состоит из двух нижеописанных стадий.
В нижеприведенном рассмотрении залипание выступов происходит вверху слева в устройстве МЭМС, как показано на фигуре 2.
После обнаружения возникновения залипания выступов для верхнего неподвижного электрода 120а выполняется первая стадия способа (фигура 3а). Она состоит в подаче на небольшое время (например, на 100 мкс) определенного напряжения (например, величины, находящейся в диапазоне от 5 В до 10 В), в результате чего возникает электростатическая сила Fe, действующая в том же направлении, что и сила Fs прилипания. Эта электростатическая сила Fe создает смещение подвижной массы 150 в направлении действия силы прилипания, в результате чего деформируются пружины 115, выступ неподвижного электрода и выступ подвижного электрода, составляющие пару выступов, для которых обнаружено состояние залипания, так что:
Fe=Fr+Ff,
где
Fr - возвращающая сила пружины, возникающая в результате деформации четырех пружин 115; и Ff - возвращающая сила выступов, возникающая в результате деформации выступа 125а неподвижного электрода и выступа 155 подвижного электрода.
Таким образом, при деформациях выступа неподвижного электрода и выступа подвижного электрода на них действует сила, равная разности между Fe и Fr.
Каждая пара выступов 125а и 155 ведет себя как пружина с жесткостью Kd. Энергия Edd деформации выступов, которая накапливается в паре деформированных выступов, может быть определена следующим образом:
где:
Kd - жесткость "пружины" пары выступов:
Kdf - жесткость выступа неподвижного электрода;
Kdm - жесткость выступа подвижного электрода;
Δxm - смещение подвижной массы 150, соответствующее деформации пары выступов.
Затем выполняется вторая стадия способа (фигура 3b). Она заключается в том, что через небольшой промежуток времени (порядка 100 мкс в рассматриваемом примере) прекращается подача определенного напряжения между первой группой неподвижных электродов 120а и подвижным электродом. После выключения напряжения (то есть электростатическая сила Fe больше не действует) на подвижную массу будет действовать возвращающая сила пружин и возвращающая сила выступов.
Следует иметь в виду, что напряжение должно выключаться в течение такого интервала времени, отношение величины которого к времени отклика системы подвижная масса - пружины будет меньше или равно 10%. Более точно, в рассматриваемом примере типичные величины указанного интервала времени выключения напряжения и времени отклика системы подвижная масса - пружины составляют 100 мкс и 1 мс соответственно.
В результате, когда напряжение выключается, энергия Edd деформации пары выступов преобразуется в кинетическую энергию путем придания скорости подвижной массе 150 в форме аксиального силового воздействия.
Когда величина этой энергии Edd деформации равна нулю, кинетическая энергия максимальна, и на подвижную массу 150 будет действовать возвращающая сила Fr пружин и сила Fs прилипания.
В присутствии силы Fs прилипания подвижная масса 150 деформирует пару выступов с максимальным использованием кинетической энергии и возвращающей силы пружин. После исчерпания кинетической энергии (то есть, когда пара выступов 125а, 155 будет иметь деформацию, противоположную деформации на первой стадии способа) на пару выступов будет действовать возвращающая сила Ff выступов. Поэтому максимальная сила (также указываемая ниже как отделяющая сила), которая действует на пару выступов для отделения выступа 155 подвижной массы от выступа 125а неподвижного электрода, равна сумме возвращающей силы Fr пружин и возвращающей силы Ff выступов. Иначе говоря, эта максимальная сила соответствует электростатической силе Fe, которая действовала на стадии 1.
Для лучшего понимания процессов, происходящих при выполнении первой и второй стадий способа, можно обратиться к аналогии натягивания тетивы лука, в результате чего происходит накапливание энергии, которая затем передается стреле после отпускания тетивы.
Если же разделение электродов после выполнения второй стадии не происходит, то можно будет повторить процесс столько раз, сколько это будет необходимо, в конце концов, для разделения электродов.
На фигуре 4 приведена структурная схема устройства 400 устранения залипания электродов, в котором реализуется способ, предлагаемый в одном из вариантов осуществления настоящего изобретения.
Устройство устранения залипания электродов содержит:
постоянное запоминающее устройство (ПЗУ) 430;
оперативное запоминающее устройство (ОЗУ) 410; и
процессор 420.
Постоянное запоминающее устройство 430 хранит исполняемые коды программ, которые при выполнении их процессором 420 обеспечивают осуществление предлагаемого в изобретении способа, например правил и действий, раскрытых в настоящем описании со ссылками на фигуры 2, 3а и 3b.
После инициализации устройства коды (команды) вышеуказанных программ передаются в оперативное запоминающее устройство 410 для выполнения процессором 420. Оперативное запоминающее устройство 410 содержит также регистры для записи переменных и параметров, необходимых для выполнения программ. Процессор 420 получает информацию, указывающую на возникновение залипания электродов инерциального устройства МЭМС, с которым соединено устройство 400, и в соответствии с командами вышеуказанных программ формирует информацию, указывающую подачу заданного напряжения на неподвижные электроды.
Все стадии способа устранения залипания электродов, представленные на фигурах 2, 3а, 3b, могут быть осуществлены также:
путем выполнения набора компьютерных команд программируемой вычислительной машиной, такой как компьютер типа PC, цифровой сигнальный процессор (DSP) или микроконтроллер, причем программы могут быть записаны на носителе информации, который может быть съемным (например, гибкий диск, диск CD-ROM или DVD-ROM) или несъемным; или же программы могут выполняться специализированным устройством или компонентом, таким как программируемая логическая матрица, специализированная интегральная микросхема или иной специализированный аппаратный компонент.
Реферат
Изобретение относится к области инерциальных микроэлектромеханических систем, используемых в качестве датчиков перегрузок, таких как, например, акселерометры или гироскопы. Способ устранения залипания электродов в инерциальном микроэлектромеханическом устройстве, содержащем: подвижную массу (150), подвешенную на каркасе с помощью пружинного устройства (115) и содержащую по меньшей мере один подвижный электрод; неподвижный электрод, жестко прикрепленный к каркасу, причем неподвижный электрод взаимодействует с подвижным электродом, в результате чего формируется пара электродов. Причем способ включает обнаружение пары залипших электродов, для которых слипание характеризуется силой прилипания (F), и стадию разделения, включающую подачу в течение заданного интервала времени заданного напряжения между электродами пары электродов для создания электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы прилипания. 3 н. и 2 з.п. ф-лы, 4 ил.
Формула
- подвижную массу (150), подвешенную на каркасе с помощью пружинного устройства (115) и содержащую по меньшей мере один подвижный электрод; и
- по меньшей мере один неподвижный электрод, жестко прикрепленный к каркасу, причем каждый неподвижный электрод взаимодействует с одним подвижным электродом, в результате чего формируется пара электродов;
причем указанный способ включает
- обнаружение по меньшей мере одной пары залипших электродов, для которых слипание характеризуется силой прилипания (Fs); и
- по меньшей мере одну стадию разделения, включающую подачу в течение заданного интервала времени заданного напряжения между электродами по меньшей мере одной пары электродов для создания электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы прилипания.
- подвижную массу (150), подвешенную на каркасе с помощью пружинного устройства (115) и содержащую по меньшей мере один подвижный электрод; и
- по меньшей мере один неподвижный электрод, жестко прикрепленный к каркасу, причем каждый неподвижный электрод взаимодействует с одним подвижным электродом, в результате чего формируется пара электродов;
причем устройство устранения залипания электродов содержит средство обнаружения по меньшей мере одной пары залипших электродов, для которых слипание характеризуется силой прилипания (Fs), а также средство подачи в течение заданного интервала времени заданного напряжения между электродами по меньшей мере одной пары электродов для создания электростатической силы, которая обеспечивает смещение подвижной массы в направлении действия силы прилипания.
Комментарии