Модульная видеоэндоскопическая система - RU2662277C2
Код документа: RU2662277C2
Чертежи






Описание
Изобретение относится к медицине и ветеринарии и может быть использовано для диагностических и хирургических манипуляций, например для медицинского обследования внутренних полостей или трубовидных органов тела путем визуального осмотра или осмотра с применением фотографических средств.
Кроме того, настоящее изобретение может быть использовано для создания эндоскопических и хирургических инструментов для взятия проб клеток или для биопсии или для хирургических целей, а также для создания хирургических инструментов с использованием лазера, в которых лазерный луч направляется вдоль гибкого канала или пропускается через гибкий канал.
УРОВЕНЬ ТЕХНИКИ
Из US 9107573 известен эндоскоп, содержащий
рукоятку,
гибкую стержневую, или съемную, часть, имеющую дистальный конец и проксимальный конец,
соединительный механизм, скрепляющий с возможностью раскрепления рукоятку с проксимальным концом гибкой стержневой части,
осветительный блок или источник света для освещения области перед дистальным концом гибкой стержневой части,
электронный видеосенсор, такой как ПЗС-датчик, размещенный на дистальном конце гибкой стержневой части,
блок изображений, размещенный в гибкой стержневой части,
причем соединительный механизм содержит канал электрических сигналов для подачи электропитания на осветительный блок и блок изображений и канал данных для передачи данных от блока изображений.
Проксимальная половина гибкой стержневой части выполнена достаточно утолщенной, чтобы вмещать, помимо прочего, средства (122) управления положением дистального конца гибкой стержневой части.
Кроме того, проксимальная половина гибкой стержневой части также содержит клапан для воздуха и клапан для отсасывания различных жидкостей организма из внутренней части рабочего стержня.
Известный эндоскоп имеет модульную конструкцию, при этом в нем обеспечена возможность сопряжения по выбору одной гибкой стержневой или съемной части с множеством различных рукояток, например четырьмя, каждая из которых может иметь собственное назначение.
Так, например, первая рукоятка может содержать электронные средства для управления блоком изображений и осветительным блоком, а также кабель для передачи видеосигнала в устройство для управления видеокамерой.
Вторая рукоятка вместо кабеля может содержать аккумуляторную батарею и средства беспроводной связи с устройством для управления видеокамерой.
Третья рукоятка может содержать аккумуляторную батарею и встроенный монитор для показа изображений, получаемых электронным видеосенсором.
Четвертая рукоятка может содержать соединительные средства типа USB для подсоединения внешнего кабеля к компьютеру.
Такая конструкция также позволяет производить по отдельности обработку, например дезинфекцию, рукоятки и гибкой стержневой части, что упрощает и ускоряет обслуживание эндоскопа.
Однако конструкция такого эндоскопа является громоздкой, область применения гибкой части ограниченной. Также к недостаткам следует отнести объединение гибкой стержневой части и всей механической части средств управления, поскольку механическая часть средств управления, которая не контактирует с биологическими тканями, также подвергается очистке и стерилизации, что предполагает изготовление всего модуля из специальных, устойчивых к стерилизационному воздействию, материалов и приводит к увеличению стоимости устройства в целом. При этом чаще всего выходят из строя (разгерметизация, залом трубки, помутнение оптики) трубка эндоскопа и оптическая система, а выход из строя механической части и электроники происходит редко. Поэтому объединение гибкой стержневой части и всей механической части приводит к тому, что при необходимости ремонта трубки эндоскопа и/или оптической части в ремонт отправляются (и, следовательно, не могут использоваться) также и две самые дорогостоящие, но при этом редко выходящие из строя части эндоскопа (механическая часть и электроника). Также вследствие объединения гибкой стержневой части и всей механической части увеличивается стоимость комплекта этих частей при проведении одной хирургической операции с разными гибкими стержневыми частями. Еще одним недостатком известного эндоскопа является размещение области соединения разъемных частей в месте охвата рукоятки ладонью, что снижает надежность этого соединения вследствие действия в этом месте разнонаправленных сил во время осуществления врачом хирургических манипуляций.
Из WO 02055126 известна система для диагностических и хирургических манипуляций in vivo, являющаяся наиболее близким аналогом предлагаемого изобретения.
Система содержит устройство, выполненное с возможностью вставки in vivo и содержащее одноразовую вставляемую часть и внешнюю часть.
Одноразовая вставляемая часть содержит датчик для получения информации in vivo.
Система также содержит передатчик для передачи этой информации и приемник для ее получения.
Кроме того, устройство в этой системе может быть выполнено не в виде видеосенсора, а применяться для механических воздействий для интубации или отсасывания, например при желудочных кровотечениях и опорожнении желудка.
К недостаткам следует отнести невозможность рассоединения рукоятки и гибкой части при любом угле изгиба последней. Также к недостаткам известной системы относится отсутствие корректировки управления при использовании разных вставляемых частей.
Таким образом, несмотря на большое многообразие известных систем, остается насущной задача создания многофункциональных модульных эндоскопических систем для диагностических и хирургических манипуляций, характеризующихся широкой универсальностью и простотой в управлении.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Указанная задача решена благодаря блоку управления эндоскопом, содержащему:
управляющие средства для управления эндоскопом;
каналы управления, связанные с управляющими средствами и выполненные с возможностью передачи управляющих воздействий от управляющих средств; и
соединительные средства, выполненные с возможностью разъемного соединения блока управления эндоскопом с вводимой частью эндоскопа с обеспечением соединения каждого канала управления блока управления эндоскопом с соответствующим каналом управления вводимой части эндоскопа в соответствующих областях соединения таким образом, что при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями, область соединения по меньшей мере одного канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа поперечна по отношению к продольной оси эндоскопа.
Указанный блок управления эндоскопом обеспечивает достижение технического результата в виде возможности отсоединения вводимой части эндоскопа от блока управления эндоскопом при любом состоянии вводимой части эндоскопа, обусловленном управляющими воздействиями, что, в свою очередь, облегчает и ускоряет работу медицинского персонала при проведении эндоскопической процедуры.
Предпочтительно каналы управления содержат по меньшей мере один механический канал управления и по меньшей мере один электронный канал управления.
Предпочтительно каналы управления содержат механические каналы управления, а управляющие средства содержат первый управляющий механизм, выполненный с возможностью передачи механическому каналу управления вращения, и/или второй управляющий механизм, выполненный с возможностью передачи механическому каналу управления поступательного движения.
Предпочтительно блок управления эндоскопом содержит рукоятку, по меньшей мере один конец которой представляет собой трубчатую часть, а указанный по меньшей мере один механический канал управления содержит три полых вала, концентрически расположенных в трубчатой части рукоятки.
Предпочтительно первый управляющий механизм содержит управляющее колесо и червячное колесо, размещенные на одной оси, и промежуточные зубчатые колеса, выполненные с возможностью передачи вращения от червячного колеса, связанного с управляющим колесом, на зубчатое колесо, жестко закрепленное на одном из полых валов.
Предпочтительно электронный канал управления содержит по меньшей мере одну электрическую контактную группу, содержащую подпружиненные контакты, неподвижно расположенные по окружности одного из полых валов на его дистальном конце, и соответствующую электрической контактной группе, содержащей контактные площадки, расположенные по окружности проксимального участка вводимой части эндоскопа.
Предпочтительно второй управляющий механизм содержит криволинейный рычаг, закрепленный в трубчатой части рукоятки одним из своих концов, выполненным в виде вилки, имеющей два плеча, пластину, жестко закрепленную на одном из полых валов и выполненную с возможностью вставки в промежуток между указанными двумя плечами вилки криволинейного рычага, причем криволинейный рычаг выполнен с возможностью его отклонения с обеспечением перемещения пластины вместе с одним из полых валов в осевом направлении, а второй управляющий механизм также содержит плоскую пружину, выполненную с возможностью возвращения рычага в исходное положение после его отклонения.
Предпочтительно для фиксации второго управляющего механизма в нерабочем положении рукоятка содержит фиксирующий механизм, содержащий стержень, на верхнем конце которого расположен штифт, а на нижний конец насажена ручка, причем стержень выполнен с возможностью поворота вокруг своей оси при повороте ручки вокруг оси этого стержня с обеспечением вхождения указанного штифта в паз, выполненный на криволинейном рычаге, для фиксации криволинейного рычага в заблокированном положении и обеспечением выведения указанного штифта из паза с переводом криволинейного рычага в высвобожденное положение.
Предпочтительно соединительные средства содержат расположенные по окружности полых валов на их дистальном конце пазы, шлицы и элементы трения, выполненные с возможностью зацепления с соответствующими выступами, шлицами и элементами трения, расположенными по окружности вводимой части эндоскопа на ее проксимальном конце.
Предпочтительно соединительные средства также содержат механическую муфту, расположенную на дистальном конце трубчатой части рукоятки и выполненную с возможностью фиксации в ней вводимой части эндоскопа.
Предпочтительно ось вращения управляющего колеса проходит поперечно относительно продольной оси трубчатой части рукоятки.
Указанная задача также решена благодаря управляющей секции эндоскопа, содержащей блок управления эндоскопом, содержащий
управляющие средства для управления эндоскопом;
каналы управления, связанные с управляющими средствами и выполненные с возможностью передачи управляющих воздействий от управляющих средств; и
соединительные средства, выполненные с возможностью разъемного соединения блока управления эндоскопом с вводимой частью эндоскопа с обеспечением соединения каждого канала управления блока управления эндоскопом с соответствующим каналом управления вводимой части эндоскопа в соответствующих областях соединения таким образом, что при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями, область соединения по меньшей мере одного канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа поперечна по отношению к продольной оси эндоскопа; и
управляющую насадку, содержащую
управляющие средства для управления эндоскопом;
каналы управления, связанные с управляющими средствами и выполненные с возможностью передачи управляющих воздействий от управляющих средств;
соединительные средства, выполненные с возможностью разъемного соединения управляющей насадки с блоком управления эндоскопом с обеспечением соединения каналов управления управляющей насадки с соответствующими каналами управления блока управления эндоскопом и/или вводимой части эндоскопа.
Предпочтительно каналы управления блока управления эндоскопом содержат по меньшей мере один механический канал управления и по меньшей мере один электронный канал управления, а каналы управления управляющей насадки содержат по меньшей мере один электронный канал управления.
Предпочтительно управляющие средства блока управления эндоскопом содержат первый управляющий механизм, выполненный с возможностью передачи механическому каналу управления блока управления эндоскопом вращения, и/или второй управляющий механизм, выполненный с возможностью передачи механическому каналу управления блока управления эндоскопом поступательного движения, а управляющие средства управляющей насадки содержат кнопки управления, выполненные с возможностью управления электронным каналом управления.
Предпочтительно блок управления эндоскопом содержит рукоятку, по меньшей мере один конец которой представляет собой трубчатую часть, а механический канал управления блока управления эндоскопом содержит три полых вала, концентрически расположенных в трубчатой части рукоятки.
Предпочтительно первый управляющий механизм содержит управляющее колесо и червячное колесо, размещенные на одной оси, и промежуточные зубчатые колеса, выполненные с возможностью передачи вращения от червячного колеса, связанного с управляющим колесом, на зубчатое колесо, жестко закрепленное на одном из полых валов.
Предпочтительно электронный канал управления блока управления эндоскопом содержит по меньшей мере одну электрическую контактную группу, которая содержит подпружиненные контакты, неподвижно расположенные по окружности одного из полых валов на его дистальном конце, и которая соответствует электрической контактной группе, содержащей контактные площадки, расположенные по окружности проксимального участка вводимой части эндоскопа, и по меньшей мере одну электрическую контактную группу, которая содержит подпружиненные контакты, неподвижно расположенные по окружности одного из валов на его проксимальном конце, а управляющая насадка содержит контактные площадки, расположенные по окружности на ее дистальном участке, соответствующие указанным подпружиненным контактам, неподвижно расположенным на проксимальном конце одного из валов.
Предпочтительно второй управляющий механизм содержит криволинейный рычаг, закрепленный в трубчатой части рукоятки управляющим концом, выполненным в виде вилки, имеющей два плеча, пластину, жестко закрепленную на одном из полых валов и выполненную с возможностью вставки в промежуток между указанными двумя плечами вилки криволинейного рычага, причем криволинейный рычаг выполнен с возможностью его отклонения с обеспечением перемещения пластины вместе с одним из полых валов в осевом направлении, а второй управляющий механизм также содержит плоскую пружину, выполненную с возможностью возвращения рычага в исходное положение после его отклонения.
Предпочтительно для фиксации второго управляющего механизма в нерабочем положении рукоятка содержит фиксирующий механизм, содержащий стержень, на верхнем конце которого расположен штифт, а на нижний конец посажена ручка, причем стержень выполнен с возможностью поворота вокруг своей оси при повороте ручки вокруг оси этого стержня с обеспечением вхождения указанного штифта в паз, выполненный на криволинейном рычаге, для фиксации указанного криволинейного рычага в заблокированном положении и обеспечением выведения указанного штифта из паза с переводом криволинейного рычага в высвобожденное положение.
Предпочтительно соединительные средства содержат расположенные по окружности полых валов на их дистальном конце пазы, шлицы и элементы трения, выполненные с возможностью зацепления с соответствующими выступами, шлицами и элементами трения вводимой части эндоскопа на ее проксимальном конце.
Предпочтительно по окружности одного из полых валов на его проксимальном конце расположены шлицы, выполненные с возможностью зацепления с соответствующими шлицами, расположенными по окружности управляющей насадки на ее дистальном участке.
Предпочтительно соединительные средства также содержат механическую муфту, расположенную на дистальном конце трубчатой части рукоятки и выполненную с возможностью фиксации в ней вводимой части эндоскопа.
Предпочтительно ось вращения колеса управления проходит поперечно относительно продольной оси трубчатой части рукоятки.
Указанная задача также решена благодаря вводимой части эндоскопа, содержащей
каналы управления, выполненные с возможностью передачи управляющих воздействий для управления вводимой частью эндоскопа, и
соединительные средства, выполненные с возможностью разъемного соединения вводимой части эндоскопа с блоком управления эндоскопом с обеспечением соединения каждого канала управления вводимой части эндоскопа с соответствующим каналом управления блока управления эндоскопом в соответствующих областях соединения таким образом, что при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями, область соединения по меньшей мере одного канала управления вводимой части эндоскопа и соответствующего канала управления блока управления эндоскопом поперечна по отношению к продольной оси эндоскопа.
Предпочтительно соединительные средства и каналы управления расположены в одном трубчатом корпусе, причем соединительные средства содержат элементы трения, расположенные по окружности проксимального участка трубчатого корпуса и соответствующие элементам трения, расположенным на дистальном конце блока управления эндоскопом.
Предпочтительно соединительные средства также содержат крепежные элементы, расположенные на дистальном участке трубчатого корпуса и выполненные с возможностью фиксации вводимой части на блоке управления эндоскопом.
Указанная задача также решена благодаря модульной видеоэндоскопической системе, содержащей
предложенный блок управления эндоскопом, предложенную вводимую часть эндоскопа,
управляющую насадку, выполненную с возможностью разъемного соединения с проксимальной частью блока управления эндоскопом, и
видеоинформационный модуль, выполненный с возможностью соединения с блоком управления эндоскопом.
Указанная задача также решена благодаря вводимой части эндоскопа, содержащей
соединительные средства, выполненные с возможностью разъемного соединения вводимой части эндоскопа с блоком управления эндоскопом,
гибкий участок, и
канал управления, выполненный с возможностью передачи управляющих воздействий для изгиба гибкого участка, в которой канал управления содержит редуктор.
Указанная вводимая часть эндоскопа обеспечивает достижение технического результата в виде повышения универсальности блока управления эндоскопом с приводом соответствующей многофункциональной модульной эндоскопической системы, так как один и тот же привод может использоваться как с относительно высокооборотным инструментом, так и с относительно низкооборотным инструментом (в последнем случае с редуктором). Указанная вводимая часть также обеспечивает повышение точности управления вводимой частью.
Предпочтительно соединительные средства и каналы управления расположены в одном трубчатом корпусе, причем соединительные средства содержат элементы трения, расположенные по окружности проксимального участка трубчатого корпуса и соответствующие элементам трения, расположенным на дистальном конце блока управления эндоскопом.
Предпочтительно соединительные средства также содержат крепежные элементы, расположенные на дистальном участке трубчатого корпуса и выполненные с возможностью фиксации вводимой части на блоке управления эндоскопом.
Предпочтительно канал управления содержит по меньшей мере две тяги, барабан, неподвижный диск, имеющий два симметричных отверстия, выполненных с возможностью пропускания через них двух тяг и направления указанных двух тяг на барабан, и полый вал, выполненный с возможностью передачи вращения на редуктор, причем по одному концу указанных двух тяг закреплены на дистальном конце гибкого участка, а их другие концы закреплены на барабане, а указанный барабан выполнен с возможностью наматывания одной тяги и сматывания второй тяги при его вращении указанным редуктором.
Предпочтительно редуктор содержит входное зубчатое колесо, выходное зубчатое колесо с внутренним зацеплением, в диске которого выполнен дугообразный вырез, и промежуточное зубчатое колесо, выполненное с возможностью передачи вращения от входного зубчатого колеса на выходное зубчатое колесо, причем ось, на которой установлено промежуточное зубчатое колесо проходит через вырез.
Предпочтительно между гибким участком и корпусом расположен жесткий участок.
Указанная задача также решена благодаря модульной видеоэндоскопической системе, содержащей
блок управления эндоскопом,
предложенную вводимую часть эндоскопа, и
видеоинформационный модуль, выполненный с возможностью соединения с блоком управления эндоскопом.
Указанная задача также решена благодаря модульной видеоэндоскопической системе, содержащей
блок управления эндоскопом,
управляющую насадку, выполненную с возможностью разъемного соединения с проксимальной частью блока управления эндоскопом,
предложенную вводимую часть эндоскопа, и
видеоинформационный модуль, выполненный с возможностью соединения с блоком управления эндоскопом.
Предпочтительно блок управления эндоскопом содержит электронный блок, выполненный с возможностью соединения с видеоинформационным модулем посредством кабеля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Описание настоящего изобретения сопровождается соответствующими чертежами, на которых:
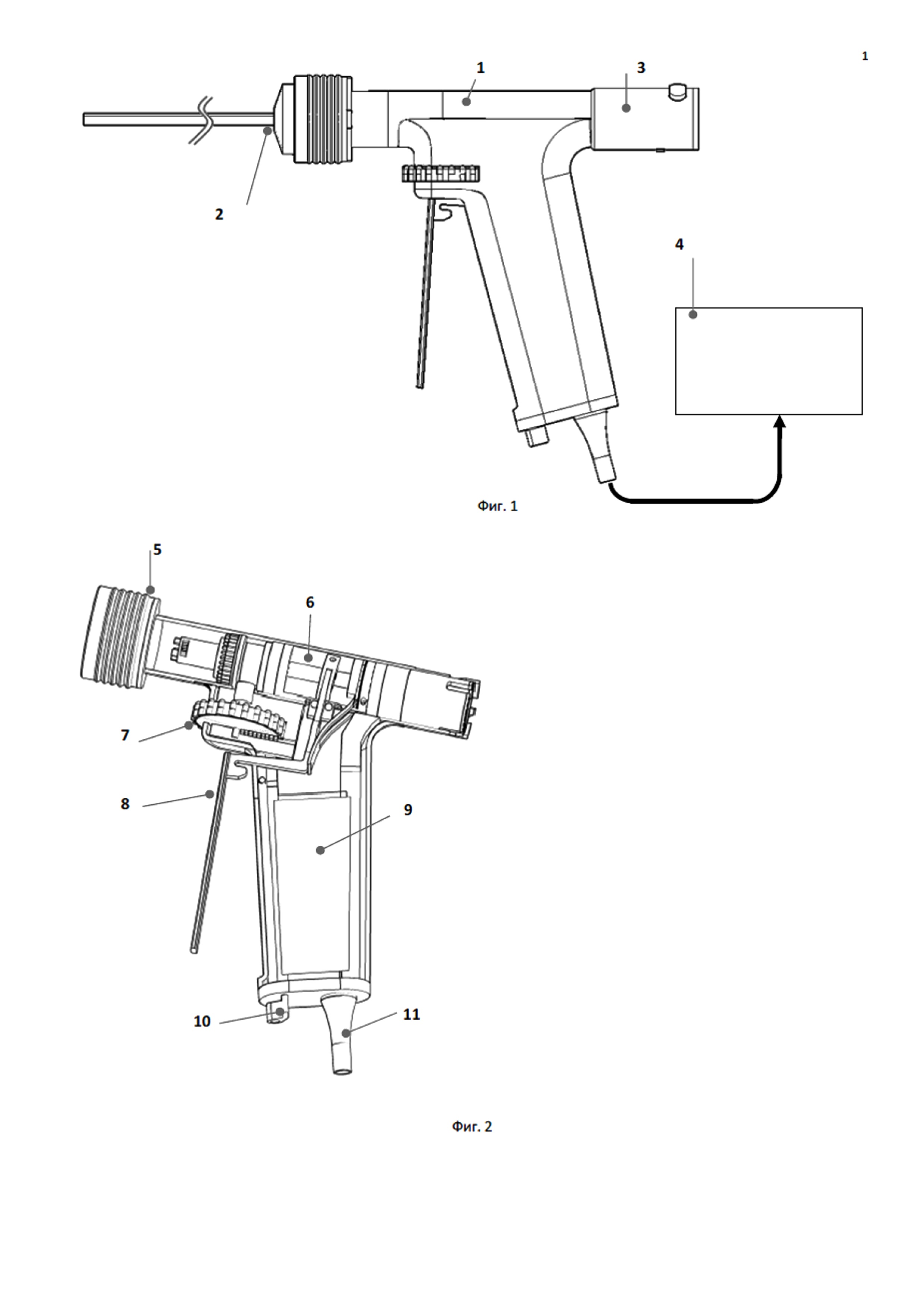
на фиг. 1 изображен вид сбоку многофункциональной модульной видеоэндоскопической системы согласно одному из вариантов реализации изобретения;
на фиг. 2 изображен вид сбоку блока управления эндоскопом согласно одному из вариантов реализации изобретения;
на фиг. 3 изображен аксонометрический вид электромеханического разъема блока управления эндоскопом согласно одному из вариантов реализации изобретения;
на фиг. 4 изображен аксонометрический вид первого управляющего механизма для управления углами изгиба гибкого участка вводимой части эндоскопа согласно одному из вариантов реализации изобретения;
на фиг. 5 изображен аксонометрический вид второго управляющего механизма для управления линейными перемещениями хирургического инструмента согласно одному из вариантов реализации изобретения;
на фиг. 6 изображен аксонометрический вид расположения полых валов согласно одному из вариантов реализации изобретения;
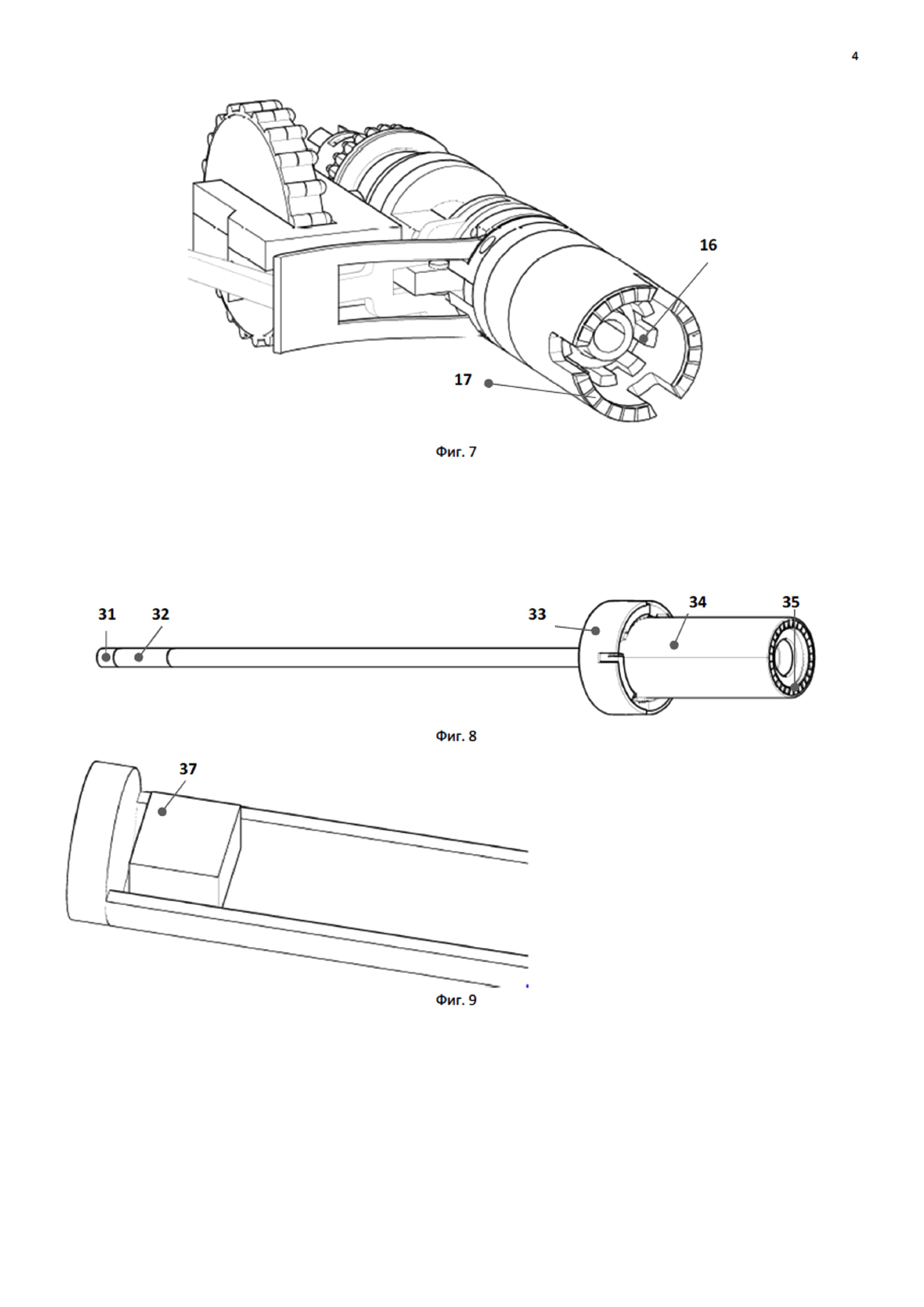
на фиг. 7 изображен аксонометрический вид проксимальной контактной группы электромеханического разъема согласно одному из вариантов реализации изобретения;
на фиг. 8 изображен вид сбоку вводимой части эндоскопа согласно одному из вариантов реализации изобретения;
на фиг. 9 изображен аксонометрический вид видеосенсора, расположенного в головке вводимой части эндоскопа, согласно одному из вариантов реализации;
на фиг. 10 изображен аксонометрический вид механизма линейного перемещения вводимой части эндоскопа согласно одному из вариантов реализации изобретения;
на фиг. 11 изображен аксонометрический вид механизма перемещения управляющих тяг вводимой части эндоскопа согласно одному из вариантов реализации изобретения;
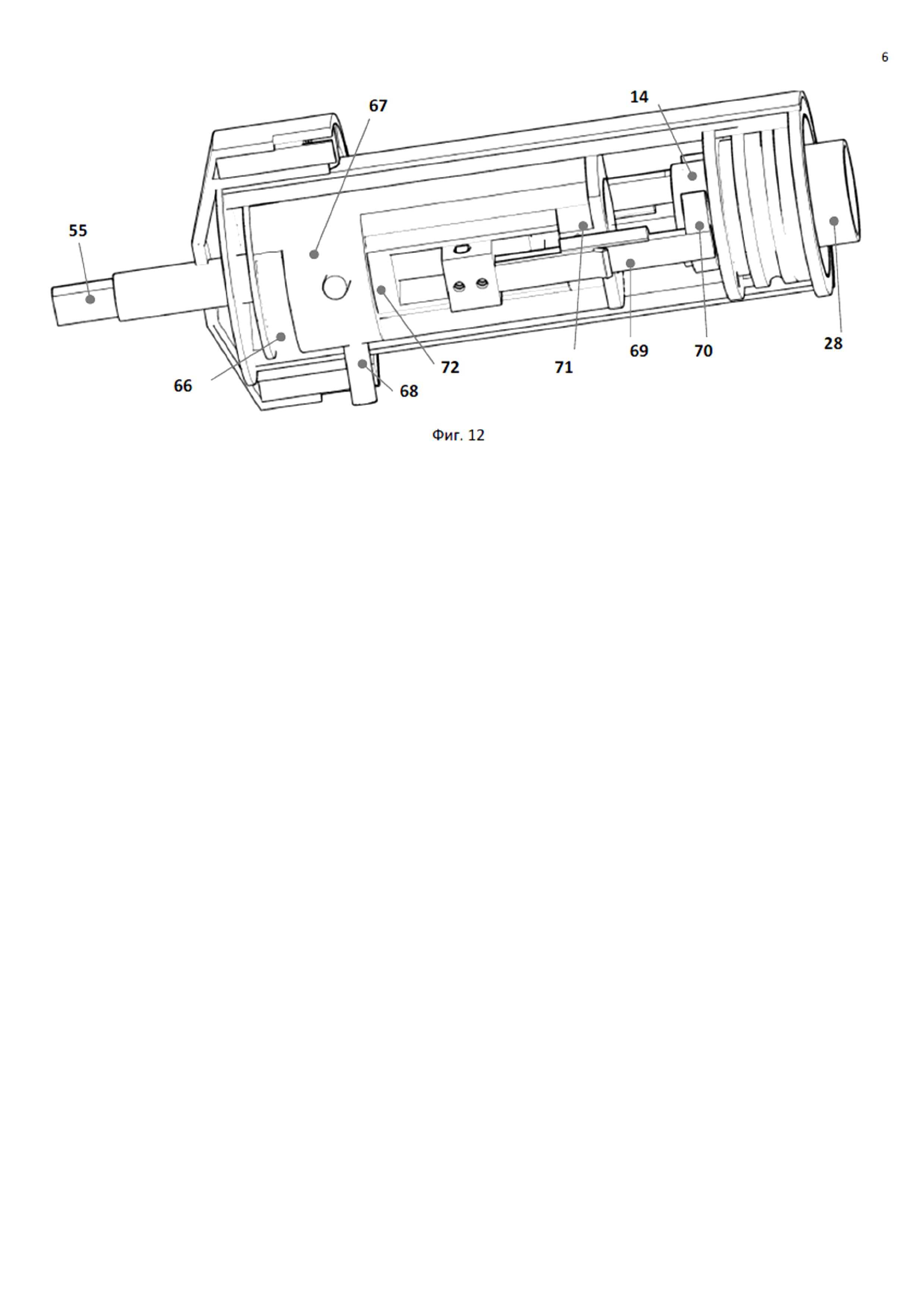
на фиг. 12 изображен аксонометрический вид механизма управления хирургическим инструментом согласно одному из вариантов реализации изобретения;
на фиг. 13 изображен аксонометрический вид управляющей насадки с электромотором согласно одному из вариантов реализации изобретения;
на фиг. 14 изображена блок-схема видеоэндоскопической системы согласно одному из вариантов реализации изобретения;
на фиг. 15 изображен аксонометрический вид вводимой части эндоскопа согласно одному из вариантов реализации изобретения при ее соединении с блоком управления эндоскопом;
на фиг. 16 изображен аксонометрический вид редуктора согласно одному из вариантов реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В одном из вариантов реализации изобретения эндоскоп содержит блок 1 управления эндоскопом и вводимую часть 2 эндоскопа. Еще в одном варианте реализации эндоскоп также содержит съемную управляющую насадку 3, выполненную с возможностью разъемного соединения с блоком управления эндоскопом. При необходимости эндоскоп может содержать набор съемных управляющих насадок 3. Еще в одном из вариантов реализации изобретения эндоскоп выполнен в виде многофункциональной модульной видеоэндоскопической системы.
В одном из вариантов реализации изобретения многофункциональная модульная видеоэндоскопическая система (фиг. 1) содержит:
блок 1 управления эндоскопом, выполненный в виде рукоятки, дистальный конец которой представляет собой трубчатую часть,
набор съемных вводимых частей 2 эндоскопа, одна из которых при работе видеоэндоскопической системы размещена в дистальной части трубчатой части блока 1 управления эндоскопом,
набор съемных управляющих насадок 3, одна из которых при работе видеоэндоскопической системы соединена с проксимальной частью трубчатой части блока 1 управления эндоскопом, и
видеоинформационный модуль 4, имеющий электрическое соединение с блоком 1 управления эндоскопом.
Блок 1 управления эндоскопом в других вариантах реализации может иметь другую конструкцию, обеспечивающую выполнение его функций. При необходимости он может быть снабжен рукояткой. Блок 1 управления эндоскопом (фиг. 2) содержит пластиковую полую пистолетную рукоятку и имеет металлический, например титановый, корпус, содержащий трубчатую часть, объединенную с верхней частью пистолетной рукоятки.
Трубчатая часть корпуса объединена с металлической несущей рамкой, повторяющей контуры пистолетной рукоятки, при этом пистолетная рукоятка механически соединена с несущей рамкой.
В одном из вариантов реализации изобретения блок 1 управления эндоскопом выполнен из металла, например титана, и содержит трубчатую часть, объединенную с верхней частью пистолетной рукоятки, и нижнюю часть пистолетной рукоятки.
Блок 1 управления эндоскопом также содержит:
механическую муфту 5,
электромеханическое устройство 6 сопряжения,
первый управляющий механизм 7,
второй управляющий механизм 8,
электронный блок 9, и
фиксирующий механизм 10 для фиксации второго управляющего механизма 8 в нерабочем (заблокированном) положении.
Блок 1 управления эндоскопом, согласно одному из вариантов реализации, для осуществления таких операций, как, например, лапароскопия, бронхоскопия, отоскопия, торакоскопия, ларингостробоскопия, используется в отсутствии управляющей насадки 3 для управления вводимой частью эндоскопа, содержащей по меньшей мере соединительные средства, выполненные с возможностью разъемного соединения вводимой части 2 эндоскопа с блоком 1 управления эндоскопом, гибкий участок и каналы управления, выполненные с возможностью передачи управляющих воздействий для изгиба гибкого участка. Каналы управления могут быть механическими и/или электронными.
Еще в одном варианте реализации блок 1 управления эндоскопом используется совместно с управляющей насадкой 3, образуя совместно с нею управляющую секцию эндоскопа. В этом варианте реализации управляющая насадка 3 содержит: управляющие средства для управления эндоскопом; каналы управления, связанные с управляющими средствами и выполненные с возможностью передачи управляющих воздействий от управляющих средств; соединительные средства, выполненные с возможностью разъемного соединения управляющей насадки 3 с блоком 1 управления эндоскопом с обеспечением соединения каналов управления управляющей насадки 3 с соответствующими каналами управления блока 1 управления эндоскопом и/или вводимой части 2 эндоскопа.
Механическая муфта 5 размещена на дистальном конце трубчатой части блока 1 управления эндоскопом для фиксации в ней вводимой части 2 эндоскопа (фиг. 8),
Электромеханическое устройство 6 сопряжения (фиг. 2) предназначено для механического и электрического соединения вводимой части 2 эндоскопа и управляющей насадки 3 (фиг. 1) с первым управляющим механизмом 7 для управления угловыми параметрами, и со вторым управляющим механизмом 8 для управления линейными параметрами (фиг. 2).
Электромеханическое устройство 6 сопряжения выполнено таким образом, что при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями, область соединения по меньшей мере одного канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа поперечна по отношению к продольной оси эндоскопа.
Кроме того, электромеханическое устройство 6 сопряжения предназначено для механического и электрического соединения вводимой части 2 эндоскопа и управляющей насадки 3 с видеоинформационным модулем 4.
Электромеханическое устройство 6 сопряжения (фиг. 2) размещено и неподвижно закреплено в трубчатой части блока 1 управления эндоскопом, предпочтительно соосно с его трубчатой частью, и содержит концентрически расположенные полые валы 28, 220, 230 и электрические контактные группы 15, 17, являющиеся ответными частями для используемых во время работы вводимой части 2 эндоскопа и управляющей насадки 3. Концентрически расположенные полые валы 28, 220, 230 образуют механический канал управления, а электрические контактные группы 15, 17 входят в состав электронных каналов управления. Концентрически расположенные полые валы 28, 220, 230 выполнены с возможностью поворота и/или перемещения в осевом направлении. Использование полых валов в качестве механических каналов обеспечивает, что при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями, область соединения по меньшей мере одного канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа сохраняет поперечность по отношению к продольной оси эндоскопа. Электрическая контактная группа 15 расположена на дистальной части электромеханического устройства 6 сопряжения, а именно в области дистального конца полого вала 230. Электрическая контактная группа 17 расположена на проксимальной части электромеханического устройства 6 сопряжения, а именно в области проксимального конца полого вала 220.
Управляющие средства для управления эндоскопом, например для передачи механическому каналу управления вращения и/или для передачи механическому каналу управления поступательного движения, содержат первый управляющий механизм 7 и второй управляющий механизм 8.
Первый управляющий механизм 7 выполнен с возможностью передачи механическому каналу управления вращения и служит для управления угловыми параметрами, такими как угол изгиба гибкого участка 32 (фиг. 8) вводимой части 2 эндоскопа.
Кроме того, первый управляющий механизм 7 служит для управления электронными устройствами, такими как, например, драйверы светодиодов освещения головки 31, электродвигатели или высокочастотные электрохирургические аппараты, путем изменения таких характеристик электропитания, как, например, ток, частота, скважность импульсов, при осуществлении их электропитания через видеоинформационный модуль 4 или электронный блок 9.
Первый управляющий механизм 7 содержит (фиг. 4): управляющее колесо 18, при помощи которого пользователь, в частности, управляет изгибом гибкого участка 32 вводимой части 2 эндоскопа,
червячное колесо 23, размещенное на одной оси с управляющим колесом 18, и
систему 21 промежуточных зубчатых колес, выполненных с возможностью передачи вращения от червячного колеса 23, связанного с управляющим колесом 18, на зубчатое колесо 22, жестко закрепленное на полом валу 230 электромеханического устройства 6 сопряжения.
В одном из вариантов реализации система 21 промежуточных зубчатых колес содержит два зубчатых колеса.
Управляющее колесо 18 расположено в верхней части блока 1 управления эндоскопом так, чтобы управляющим колесом 18 было удобно управлять пальцами руки, удерживающей блок 1 управления эндоскопом, выполненный в форме пистолетной рукоятки.
Ось вращения управляющего колеса 18 проходит поперечно относительно продольной оси электромеханического устройства 6 сопряжения.
Внутри управляющего колеса 18 размещено прозрачное или светопроницаемое тело, например цилиндр из оптического акрила, пропускающее свет от источника, расположенного внутри оси управляющего колеса 18.
На нижней части управляющего колеса 18 управления размещен абсолютный энкодер 19 и линейка светоприемников 20.
Первый управляющий механизм 7 является двухканальным, поскольку обеспечивает передачу управляющих воздействий на механический канал управления и электронный канал управления.
Механический канал управления, используемый с первым управляющим механизмом 7, образован управляющим колесом 18, червячным колесом 23 и системой 21 промежуточных зубчатых колес.
В одном из вариантов реализации изобретения вращением управляющего колеса 18 изменяют интенсивность света, излучаемого источником света, таким как светодиод, или управляют отсосом.
Данные об абсолютном положении управляющего колеса 18 непрерывно поступают в видеоинформационный модуль 4.
При вращении управляющего колеса 18 вращающий момент через червячное колесо 23 передается на систему 21 промежуточных зубчатых колес.
Использование червячной передачи предотвращает передачу вращающего момента от гибкого участка 32 вводимой части 2 эндоскопа на управляющее колесо 18, т.е. усилие, оказываемое на гибкий участок 32, находящийся внутри тела пациента, при работе видеоэндоскопической системы не приведет к нежелательному проворачиванию управляющего колеса 18 и не помешает врачу осуществлять необходимые манипуляции.
Благодаря такому техническому решению гибкий участок 32 вводимой части 2 эндоскопа может быть выполнен из упругого материала, например силикона, в отличие от часто используемых в настоящее время с этой целью пакета металлических пластинок или металлических элементов.
Система 21 промежуточных зубчатых колес (фиг. 4) передает вращающий момент на зубчатое колесо 22 электромеханического устройства 6 сопряжения, жестко закрепленное на полом валу 230. Далее полый вал 230 через элементы 13 трения, расположенные по окружности на его дистальном конце, передает вращение на соответствующие элементы трения (не показаны) проксимального электромеханического разъема (не показан) вводимой части 2 эндоскопа. В этом варианте реализации область взаимодействия элементов 13 трения полого вала 230 и элементов трения проксимального электромеханического разъема вводимой части 2 эндоскопа образует область соединения канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа, которая поперечна по отношению к продольной оси эндоскопа при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями. Это, в частности, обеспечено тем, что при использовании полого вала в качестве канала управления блока управления, передающего вращение через электромеханический разъем на соответствующие каналы управления вводимой части, как описано выше, обеспечивается неизменность ориентации указанной области соединения по отношению к оси эндоскопа при любом состоянии вводимой части, вызванном управляющими воздействиями. В других вариантах реализации возможно использовать и другие соединительные средства и/или способы соединения, обеспечивающие такую неизменность ориентации. Такие соединительные средства и/или способы соединения при необходимости могут быть использованы со всеми другими вариантами реализации настоящего изобретения.
Электронный канал управления содержит по меньшей мере одну электрическую контактную группу 15, содержащую подпружиненные контакты, неподвижно расположенные по окружности одного из полых валов 230 на его дистальном конце, и соответствующую изображенной на фиг. 8 электрической контактной группе 35 проксимального электромеханического разъема (не показан), содержащей контактные площадки, расположенные по окружности проксимального участка вводимой части эндоскопа.
Электронный канал управления, используемый в первом управляющем механизме 7, образован управляющим колесом 18, абсолютным энкодером 19 и светоприемниками 20.
При вращении управляющего колеса 18 одновременно с ним свое угловое положение меняет абсолютный энкодер 19, благодаря чему изменяется освещение светоприемников 20 в зависимости от угла поворота управляющего колеса 18.
Сигнал от светоприемников 20 поступает в электронный блок 9, где этот сигнал преобразуется в показатель абсолютного угла поворота управляющего колеса 18, который затем при необходимости передается в видеоинформационный модуль 4.
В одном из вариантов реализации видеоинформационный модуль 4, в зависимости от угла поворота управляющего колеса 18, может изменять характеристики электропитания присоединенных устройств, таких как хирургический отсос. Кроме того, сам электронный блок 9 может изменять характеристики электропитания присоединенных устройств, например светодиодов освещения вводимой части 2 эндоскопа.
В энкодере 19 могут применяться, помимо прочего, коды Грея.
При присоединении вводимой части 2 эндоскопа к блоку 1 управления эндоскопом данные о положении управляющего колеса 18 запоминаются электронным блоком 9 блока 1 управления эндоскопом. При изменении положения управляющего колеса 18 данные о его положении направляются в электронный блок 9, где они декодируются, например из кодов Грея в бинарный код. Далее данные о положении управляющего колеса 18 от электронного блока 9 непрерывно поступают на видеоинформационный модуль 4. Электронный блок 9 определяет тип вводимой части 2 и передает эти данные в видеоинформационный модуль 4. Электронный блок 9 или видеоинформационный модуль 4 формирует соответствующий сигнал управления в требуемом канале управления. Например, если электронный блок 9 определил вводимую часть 2 как ларингостробоскоп, то при повороте управляющего колеса 18 может изменяться частота следования световых импульсов от светодиодов на дистальном конце гибкого участка 32. В случае, когда видеоинформационный модуль 4 получил от электронного блока 9 информацию, что используется шейверная насадка, при повороте управляющего колеса 18 может быть реализовано управление напряжением на электродвигателе управляющей насадки 3 или хирургического аспиратора. Алгоритмы управления могут быть оперативно изменены врачом из программного меню видеоинформационного модуля 4 или определяться электронным блоком 9 в зависимости от типа вводимой части 2 эндоскопа.
Второй управляющий механизм 8, размещенный в блоке 1 управления эндоскопом, служит для управления линейными параметрами, в частности для управления положением, например иглы, петли, электрода или углом раскрыва рабочей части хирургического инструмента, размещаемого при необходимости на дистальном конце вводимой части 2 эндоскопа.
Второй управляющий механизм 8 содержит криволинейный рычаг 27 (фиг. 5), плоскую пружину 26, пластину 25 и полый вал 28, установленный внутри полого вала 230 концентрически по отношению к нему.
Криволинейный рычаг 27 имеет управляющий конец и управляемый конец.
Управляющий конец рычага 27 закреплен в электромеханическом устройстве 6 сопряжения. Управляющий конец криволинейного рычага 27 предпочтительно выполнен в виде вилки, имеющей два плеча.
В промежуток между двумя плечами вставлена пластина 25, выполненная с возможностью перемещения, из поверхности которой выступают два небольших штифта так, что эти штифты расположены по обе стороны управляющего конца криволинейного рычага 27, т.е. охватывают его. Штифты служат упорами для управляющего конца криволинейного рычага 27.
При отклонении криволинейного рычага 27 поперечно его продольной оси, пластина 25 и жестко связанный с ней полый вал 28 совершают перемещение в осевом направлении вдоль продольной оси электромеханического устройства 6 сопряжения.
Полый вал 28 через вырезы 14, выполненные на его дистальном конце, передает перемещение в осевом направлении в вводимую часть 2 эндоскопа.
Плоская пружина 26 поджимает рабочее плечо криволинейного рычага 27 в дистальном направлении и обеспечивает перемещение криволинейного рычага 27 в крайнее дистальное (высвобожденное) положение таким образом, что пользователю не надо прилагать усилий для приведения хирургического инструмента в исходное, т.е. открытое, положение.
Фиксирующий механизм 10 для фиксации второго управляющего механизма 8 служит для фиксации криволинейного рычага 27 в нерабочем положении, когда в использовании криволинейного рычага 27 нет необходимости.
Фиксирующий механизм 10 содержит стержень 200, на верхнем конце которого, как показано на фиг. 5, выполнен штифт 202, а на нижний конец стержня 200 насажена ручка 201.
Стержень 200 выполнен с возможностью поворота вокруг своей продольной оси, в частности путем поворота ручки 201 вокруг продольной оси стержня 200.
В одном из вариантов реализации изобретения при повороте стержня 200 при помощи ручки 201 против часовой стрелки, если смотреть на стержень 200 со стороны ручки 201, штифт 202 входит в ответный паз на криволинейном рычаге 27 и фиксирует криволинейный рычаг 27 в заблокированном положении, в котором управляемый конец криволинейного рычага 27 прижат к рукоятке блока 1 управления эндоскопом.
При повороте стержня 200 при помощи ручки 201 по часовой стрелке, если смотреть на стержень 200 со стороны ручки 201, например на 90°, штифт 202 выходит из ответного паза на криволинейном рычаге 27, и под действием плоской пружины 26 происходит отклонение криволинейного рычага 27, после которого управляемый конец криволинейного рычага 27 оказывается в высвобожденном положении, т.е. находится на расстоянии от рукоятки блока 1 управления эндоскопом.
Электронный блок 9 выполнен в виде электронной платы для размещения электронных компонентов. К электронному блоку 9 идет сигнал от электрической контактной группы 15, электрической контактной группы 17 и абсолютного энкодера управляющего колеса 18.
Электронный блок 9 соединен с видеоинформационным модулем 4 посредством кабеля 11. В одном из вариантов реализации в электронном блоке 9 установлен NFC-контроллер, посредством которого электронный блок 9 определяет тип вводимой части 2 эндоскопа.
Каналы управления управляющей насадки 3, содержащие электронный канал управления и механический канал управления, связаны с управляющими средствами и выполнены с возможностью передачи управляющих воздействий от управляющих средств. В различных вариантах реализации указанные управляющие воздействия передаются каналам управления блока 1 управления эндоскопом и/или каналам управления вводимой части 2 эндоскопа через каналы управления блока 1 управления эндоскопом. Управляющие средства содержат кнопки управления, выполненные с возможностью управления электронным каналом управления управляющей насадки 3.
Управляющие воздействия могут поступить от кнопок управления управляющей насадки 3, от управляющего колеса 18 или от видеоинформационного модуля 4. Объектом управления могут быть светодиоды освещения на дистальном конце гибкого участка 32, двигатель в управляющей насадке 3 или внешнее устройство, такое как вакуумный экстрактор.
Пользователь осуществляет управление вводимой частью 2 эндоскопа, используя управляющие средства, а именно механические органы управления, такие как управляющее колесо 18 первого управляющего механизма 7, криволинейный рычаг 27 второго управляющего механизма 8 и электрические органы управления, такие как кнопки управления, расположенные на управляющей насадке 3, присоединенной к электромеханическому устройству 6 сопряжения.
Для передачи вводимой части 2 эндоскопа сигналов механического управления электромеханическое устройство 6 сопряжения содержит полый вал 230 и полый вал 28, концентрически расположенный в полом вале 230 (фиг 6).
Полый вал 230 участвует в управлении изгибом гибкого участка 32 вводимой части 2 эндоскопа посредством первого управляющего механизма 7.
Полый вал 230 выполнен с возможностью вращения от управляющего колеса 18 и имеет на своем дистальном конце соединительные элементы, предпочтительно элементы 13 трения.
Полый вал 28 участвует в управлении линейными параметрами вводимой части 2 эндоскопа посредством второго управляющего механизма 8.
Полый вал 28 выполнен с возможностью перемещения в осевом направлении при движении криволинейного рычага 27 и имеет на своем дистальном конце вырезы 14.
Для передачи вводимой части 2 эндоскопа вращающего момента от электродвигателя в электромеханическом устройстве 6 размещен полый вал 220, который предпочтительно охватывается управляющей насадкой 3.
Полый вал 220 содержит шлицы 12 и 16, размещенные соответственно на его дистальном и проксимальном концах.
Шлицы 12, элементы 13 трения, вырезы 14 и электрическая контактная группа 15 дистальной части электромеханического устройства 6 сопряжения образуют соединительные средства, или ответную часть, для проксимального электромеханического разъема вводимой части 2 эндоскопа. В зависимости от задачи, выполняемой вводимой частью 2 эндоскопа, проксимальный электромеханический разъем содержит соответствующие шлицы, элементы трения или выступы для управления механическим каналом управления и электрическую контактную группу 35 для управления по электронному каналу управления.
Изображенные на фиг. 7 шлицы 16 и электрическая контактная группа 17 проксимальной части электромеханического устройства 6 сопряжения образуют соединительные средства, или ответную часть, для дистального разъема управляющей насадки 3. Ответная часть дистального разъема управляющей насадки 3 содержит соответствующие шлицы и электрическую контактную группу.
Вводимая часть 2 эндоскопа, которая изображена на фиг. 8 и которая может использоваться как в составе раскрытой выше многофункциональной модульной видеоэндоскопической системы, так и только с блоком 1 управления эндоскопом, выполнена в виде составного тела и содержит головку 31, гибкий участок 32, крепежные элементы 33 и проксимальный электромеханический разъем (не показан).
Головка 31 вводимой части 2 эндоскопа размещена на ее дистальном конце и неподвижно закреплена на гибком участке 32.
Электромеханическая контактная часть выполнена в виде трубчатого корпуса 34, который содержит механический и электронный каналы управления, необходимые для управления изгибом гибкого участка 32 и/или угловым положением активного элемента головки 31. При этом управление изгибом гибкого участка приводит к изменению состояния вводимой части, например ее переход из прямого состояния в изогнутое состояние. В других вариантах реализации управляющие воздействия, передаваемые по каналам управления, переводят вводимую часть между другими состояниями, вид которых определяется конкретным применением.
Гибкий участок 32 вводимой части 2 эндоскопа соединяет головку 31 с трубчатым корпусом 34.
В одном из вариантов реализации изобретения активным элементом головки 31 является видеомодуль 37 (фиг. 9), размещенный в головке 31.
Еще в одном из вариантов реализации изобретения активным элементом головки 31 является хирургический инструмент, размещенный на дистальном конце головки 31.
В одном из вариантов реализации изобретения гибкий участок 32 выполнен цилиндрическим и сплошным, т.е. без полостей, а вводимая часть 2 эндоскопа также содержит жесткую часть, расположенную между гибким участком 32 и трубчатым корпусом 34. В другом варианте реализации изобретения гибкий участок 32 может быть заменен на жесткий участок.
Механизмы, размещенные в трубчатом корпусе 34, обеспечивают возможность изменения положения хирургического инструмента во время хирургической или диагностической процедуры. Более подробно эти механизмы описаны далее.
Электромеханическая контактная часть вводимой части является ответной частью для дистального конца электромеханического устройства 6 сопряжения и обеспечивает соединение электронного и механического каналов управления блока 1 управления эндоскопом с соответствующими электронным и механическим каналами управления вводимой части 2. При этом область соединения электронного и механического каналов управления блока 1 управления эндоскопом с соответствующими электронным и механическим каналами управления вводимой части 2 поперечна по отношению к продольной оси эндоскопа при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями. Более подробно средства соединения электронного и механического каналов управления блока 1 управления эндоскопом с соответствующими электронным и механическим каналами управления вводимой части 2 описаны ниже.
Крепежные элементы 33 служат для неподвижного закрепления (фиксации) вводимой части 2 эндоскопа в блоке 1 управления эндоскопом.
Крепежные элементы 33 выполнены с возможностью закрепления на механической муфте 5 и неподвижно соединены с трубчатым корпусом 34.
Согласно одному из вариантов реализации изобретения, крепежные элементы 33 содержат вырезы, в которые входят зубья механической муфты 5.
Видеомодуль 37 содержит видеосенсор и осветительные элементы, например светодиоды.
Вместе с тем, в других вариантах реализации головка 31 видеоэндоскопической части может содержать только оптическую систему и элементы освещения, например для диафаноскопии.
В одном из вариантов реализации головка 31 и гибкий участок 32 выполнены неразъемными с трубчатым корпусом 34.
Могут быть реализованы различные комбинации головок 31, отличающихся по управляемости видеомодуля 37 (управляемый, неуправляемый), и различные комбинации типов гибкого участка 32, отличающихся по управляемости дистального конца гибкого участка 32 и по типу самого участка (жесткий, гибкий).
Для управления перемещением в осевом направлении при повороте управляющего колеса 18 в трубчатом корпусе 34 размещен механизм винт-гайка (фиг. 10), который содержит полый вал 50, редуктор 51, винтовой элемент 52, ходовой элемент 53 и неподвижную шайбу 54.
Полый вал 50 выполнен с возможностью передачи вращающего момента от блока 1 управления на редуктор 51 посредством соединения соединительных средств, в частности элементов 13 трения, расположенных по окружности на дистальном конце полого вала 230, с элементами трения, расположенными по окружности на проксимальном электромеханическом разъеме.
В этом варианте реализации область взаимодействия элементов 13 трения полого вала 230 и элементов трения проксимального электромеханического разъема вводимой части 2 эндоскопа образует область соединения канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа, которая поперечна по отношению к продольной оси эндоскопа при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями.
Редуктор 51 (фиг. 16) обеспечивает необходимую чувствительность управления и определяет направление вращения винтового элемента 52 (по или против часовой стрелки при вращении колеса 18 по часовой стрелке).
В одном из вариантов реализации редуктор содержит входной вал, выполненный с возможностью соединения с полым валом 50. Входной вал приводит во вращение зубчатое колесо 100, которое передает вращение на промежуточные зубчатые колеса 101 и 103, закрепленные на одной оси. Ось закреплена на неподвижной дистальной стенке (не показана) редуктора. Промежуточные зубчатые колеса 101 и 103 передают вращение на винтовой элемент 52 посредством зубчатого колеса 102 с внутренним зацеплением, соединенного с винтовым элементом 52. В зубчатом колесе 102 выполнен дугообразный вырез 104, через который проходит ось промежуточных зубчатых колес 101 и 103. Размер этого выреза определяет диапазон поворота зубчатого колеса 102.
В одном из вариантов реализации редуктор содержит одно промежуточное зубчатое колесо.
Винтовой элемент 52 размещен параллельно продольной оси трубчатого корпуса 34 и проксимальным концом механически связан с выходным валом редуктора 51. Дистальный конец винтового элемента закреплен в неподвижной шайбе 54. В этой неподвижной шайбе 54 сделаны прорези - направляющие, по которым ходовой элемент 53 может перемещаться в осевом направлении по резьбе.
На дистальном конце ходовой элемент 53 соединен с жесткой тягой 55. На проксимальном конце ходового элемента прикреплено цилиндрическое тело (гайка) с резьбой внутри, которое образует с винтовым элементом 52 винтовую передачу, благодаря которой обеспечивается перемещение ходового элемента 53 с жесткой тягой 55.
Перемещение жесткой тяги 55 в осевом направлении далее преобразуется в перемещение рабочих частей хирургического инструмента, например в изменение размеров и в перемещение петли для полипэктомии.
Благодаря вырезу 104 зубчатое колесо 102 может быть повернуто только на заданный угол, вследствие чего ограничено перемещение хирургического инструмента и таким образом исключена поломка инструмента, которая может возникнуть при неограниченном перемещении рабочих частей этого хирургического инструмента.
Для управления изгибом гибкого участка 32 при повороте управляющего колеса 18 в вводимой части 2 размещен механизм управления изгибом гибкого участка 32 (фиг. 11), который состоит из полого вала 50, редуктора 51, барабана 62, неподвижного диска 63 и двух тяг 60.
Полый вал выполнен с возможностью передачи вращающего момента от блока 1 управления к редуктору 51 посредством соединения соединительных средств, в частности элементов 13 трения, расположенных по окружности полого вала 230 на дистальной части электромеханического устройства 6 сопряжения, с соответствующими элементами трения, расположенными по окружности на проксимальном электромеханическом разъеме.
В этом варианте реализации область взаимодействия элементов 13 трения полого вала 230 и элементов трения проксимального электромеханического разъема вводимой части 2 эндоскопа образует область соединения канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа, которая поперечна по отношению к продольной оси эндоскопа при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями.
Редуктор 51 обеспечивает необходимую чувствительность управления и определяет направление изгиба гибкого участка 32 (влево или вправо при вращении колеса 18 по часовой стрелке).
Барабан 62 выполнен с возможностью поворота вокруг своей оси, расположенной параллельно продольной оси трубчатого корпуса 34. Барабан 62 механически связан с выходным валом редуктора 51.
Неподвижный диск 63 имеет два симметричных отверстия, через которые проходят две тяги 60.
На фиг. 16 изображен редуктор согласно одному из вариантов реализации, который содержит входной вал, выполненный с возможностью соединения с полым валом 50. Входной вал приводит во вращение зубчатое колесо 100, которое передает вращение на промежуточные зубчатые колеса 101 и 103, закрепленные на одной оси. Ось закреплена на неподвижной дистальной стенке (не показана) редуктора. Промежуточные зубчатые колеса 101 и 103 передают вращение на барабан 62 посредством зубчатого колеса 102 с внутренним зацеплением, соединенного с барабаном 62 выходным валом. В зубчатом колесе 102 выполнен дугообразный вырез 104, через который проходит ось промежуточных зубчатых колес 101. Размер этого выреза определяет диапазон поворота зубчатого колеса 102.
По одному концу двух тяг закреплено на дистальном конце гибкого участка. Другие концы двух тяг 60 закреплены в верхней точке барабана 62 таким образом, что при изгибе гибкого участка на 0 градусов (гибкий участок прямой) обе тяги имеют одинаковую длину и точка закрепления тяг на барабане 62 находится в верхнем положении. При повороте управляющего колеса 18 вращающий момент через дистальный разъем электромеханического устройства 6 сопряжения, проксимальный разъем трубчатого корпуса 34 и редуктор 51 передается на барабан 62. При вращении барабана 62 одна из тяг, в зависимости от направления вращения, наматывается на его поверхность, другая - сматывается, в результате чего гибкий участок 32 изгибается.
Радиус барабана 62 и максимальный угол α его поворота рассчитываются такими, чтобы изменение длин тяг 60 приводило к максимальному требуемому изгибу гибкого участка 32.
Аналогично насадке с хирургическим инструментом вырез 104 также ограничивает поворот зубчатого колеса 102, вследствие чего ограничено перемещение двух тяг и таким образом исключена поломка гибкого участка 32, которая может возникнуть при неограниченном перемещении этих двух тяг.
В одной из возможных реализаций варианта, изображенного на фиг. 12, который содержит неразъемные жесткий участок и трубчатый корпус 34, на дистальном конце головки 31 размещается хирургический инструмент, управляемый перемещением в осевом направлении полого вала 28 при воздействии вторым управляющим механизмом 8, при помощи механизма управления хирургическим инструментом, который состоит из
тяги 55, расположенной на дистальном конце механизма управления хирургическим инструментом и выполненной с возможностью передачи перемещения в осевом направлении на дистальный конец головки 31,
механизма отпирания разъема, который состоит из пружины 66, обеспечивающей нахождение механизма отпирания в исходном (закрытом) положении,
цилиндрического элемента 67, выполненного с возможностью вращения вдоль своей продольной оси,
рычагов 68, закрепленных на цилиндрическом элементе 67,
выступов(зубьев) 71, симметрично и неподвижно закрепленных на цилиндрическом элементе 67,
цилиндрического неподвижного тела 72 с продольными проточками, относительно которого вращается цилиндрический элемент 67,
защелки, соединяющей подвижный полый вал 28 и тягу 55 и состоящей из двух симметричных элементов(зубьев защелки) 70, выполненных с возможностью вхождения при закрытом разъеме в вырезы 14 дистального конца полого вала 28,
двух симметричных подпружиненных пластин 69, на одном конце каждой из которых размещены симметричные элементы(зубья защелки) 70, а второй конец - жестко закреплен с тягой 55.
При соединении трубчатого корпуса 34 с дистальным концом электромеханического устройства 6 сопряжения (фиг. 12) зубья 70 защелки совмещаются с вырезами 14 на конце полого вала 28 в момент, когда он максимально сдвинут в дистальном направлении путем приведения криволинейного рычага 27 в высвобожденное положение.
После этого вводят зубья механической муфты 5 в вырезы крепежных элементов 33 с фиксацией вводимой части 2 эндоскопа на блоке 1 управления эндоскопом.
В этом варианте реализации область взаимодействия зубьев 70 защелки и вырезов 14 на конце полого вала 28 образует область соединения канала управления блока управления эндоскопом и соответствующего канала управления вводимой части эндоскопа, которая поперечна по отношению к продольной оси эндоскопа при любом состоянии вводимой части эндоскопа, обусловленного управляющими воздействиями.
В дальнейшем, при воздействии врача на криволинейный рычаг 27, полый вал 28 совершает возвратно-поступательные перемещения, которые передаются через пластины 69, перемещающиеся в продольных проточках цилиндрического неподвижного тела 72 и цилиндрического элемента 67, на тягу 55.
При извлечении трубчатого корпуса 34 вращательное движение муфты 5 через рычаги 68 передается цилиндрическому элементу 67. Выступы 71, при вращении цилиндрического элемента 67, попадают под пластины 69, поднимая их на высоту, достаточную для выхода зубьев 70 защелки из вырезов 14 полого вала 28.
В одной из реализаций управляющая насадка 3 для шейвера состоит из вала со шлицами 82 (фиг. 13), являющимися ответными частями к шлицам 16 проксимального разъема электромеханического устройства 6 сопряжения, сепаратора 83, предназначенного для выделения из внутренней полости полого вала 220 удаляемого биологического материала, который потом по трубке 85 выводится во внешнее устройство сбора, и передачи валу вращательного момента, кнопок 76 управления и электронных компонентов 84 управления в виде микросхем, электрической контактной группы 78, являющейся ответной частью к проксимальной электрической контактной группе 17 электромеханического устройства 6 сопряжения и представляющей собой расположенные по сегментам круга подпружиненные контакты типа pogo pin, редуктора 86, предназначенного для получения требуемых характеристик, например скорости вращения инструмента на дистальном конце головки 31, электрического мотора 87.
Плата электронных компонентов 84 соединена с кнопками 76 управления и контактной группой 78.
В одном из вариантов реализации основными элементами видеоинформационной системы (фиг. 14) являются: видеомодуль 37, формирующий электрический сигнал, источник света 88, дополнительный преобразователь сигнала видеомодуля - преобразователь 89 интерфейса, расположенный в трубчатом корпусе 34 вводимой части эндоскопа,
электрический дистальный разъем, образованный электрическими контактными группами 35 и 15,
электромеханическое устройство 6,
электрический проксимальный разъем, образованный электрическими контактными группами 17 и 78, к которым подключены кнопки 76 управления и, для некоторых реализаций, исполнительные устройства, например электродвигатель, шинные переключатели 91.
Сигнал от видеомодуля, при необходимости, подвергается предварительной обработке в преобразователе 89 интерфейса. Преобразователь 89 интерфейса обеспечивает сопряжение с электронным блоком 9. Этот шаг не является обязательным и его необходимость определяется возможностями электронного блока 9 обрабатывать входные сигналы различных форматов. Далее, через разъем, образованный электрическими контактными группами 35 и 15, сигнал попадает на шинные переключатели 91. Необходимость в них обусловлена тем, что вводимая часть 2 эндоскопа устанавливается в блок 1 управления эндоскопом с четырьмя фиксированными углами поворота вокруг своей продольной оси. Это позволяет врачу выбирать направление обзора эндоскопа в соответствии с расположением исследуемой области, при этом не приходится корректировать положение блока 1 управления эндоскопом в пространстве. Например, для эндоскопа с обзором вперед-вбок могут быть выбраны варианты установки вводимой части 2 эндоскопа для обзора вверх, вниз, влево или вправо. Кроме того, для эндоскопов с гибкими управляемыми дистальными концами могут быть выбраны варианты установки с изгибом в вертикальной или горизонтальной плоскости. Индикация выбранного угла установки вводимой части 2 эндоскопа осуществляется выделением в электрической контактной группе 15 четырех контактов и в электрической контактной группе 35 - одного (фиг. 15). Контакт в электрической контактной группе 35 формирует сигнал, в зависимости от поворота (показан круговой стрелкой) вводимой части 2 эндоскопа, при установке этот сигнал поступает на контакт А, В, С или D электрической контактной группы 15. Далее сигнал 90 (показан стрелкой) с контакта А, В, С или D (для примера, на фиг. 15 - с контакта А) поступает на соответствующий шинный переключатель 91, который осуществляет необходимую коммутацию между шиной данных вводимой части 2 эндоскопа и электронным блоком 9 рукоятки блока 1 управления эндоскопом.
Электронный блок 9 рукоятки блока 1 управления эндоскопом осуществляет преобразование видеосигнала в стандартный выходной формат. Например, сигнал от видеосенсора в параллельном формате DVP или последовательном MIPI CSI может быть преобразован в выходной последовательный сигнал USB 3.0.
Кроме того, электронный блок 9 рукоятки блока 1 управления эндоскопом получает данные от абсолютного энкодера управляющего колеса 18, данные о типе вводимой части 2 эндоскопа и положении кнопок 76 управления управляющей насадки 3. Эти данные передаются в центральный видеоинформационный модуль 4 для выбора алгоритма обработки видеоинформации и формирования соответствующего управления.
Центральный видеоинформационный модуль 4 предназначен для обработки, хранения и отображения информации. Видеоинформационный модуль 4 может быть описан в виде сочетания 5 блоков, таких как блок 56 отображения, блок 57 локального хранения данных, блок 58 сопряжения с внешними информационными системами, блок 59 первичной обработки данных и блок 61 управления и сопряжения с пользователем. Далее сигнал от видеоинформационного модуля 4 идет на внешние управляемые устройства 80 (высокочастотный хирургический аппарат, вакуумный экстрактор) и/или от них на видеоинформационный модуль 4.
Блок отображения выводит видеосигнал, например в формате HDMI, на монитор. Количество мониторов может быть от одного до нескольких, например, один для врача, а второй для пациента.
Блок локального хранения данных выводит всю эндоскопическую видеосессию или отдельные фото на внешние устройства хранения, такие как флеш-память или жесткий диск. Обычно эти данные переписываются и/или стираются перед новым обследованием.
В медицине общепринятым форматом хранения результатов эндоскопии, томографии, УЗИ и прочих обследований является DICOM. Специальное программное обеспечение, которое хранит указанные результаты на удаленных серверах и позволяет читать и/или записывать медицинские данные в этом формате, называется DICOM Клиент или DICOM Сервер. В блоке сопряжения с внешними информационными системами реализован DICOM Клиент.
Блок первичной обработки данных обеспечивает дополнительную обработку (фильтрацию, сжатие, спектральные преобразования) видеосигнала.
Посредством этого блока, например, можно изменить контрастность или выделить определенный участок спектра во входном сигнале или синтезировать видеоизображение из некоторых участков, например усилить красный цвет, в котором лучше видна капиллярная сеть.
С помощью блока управления и интерфейса с пользователем пользователь осуществляет настройки параметров изображения на мониторе, таких как уровень белого, яркость, контраст и т.д., с помощью сенсорного экрана и/или кнопок/ручек управления. Далее этот сигнал идет в блок первичной обработки данных.
В настоящем описании изобретение описано на примере вариантов реализации, которые не следует трактовать как ограничительные. Для специалиста очевидно, что возможны изменения и модификации, находящиеся в объеме настоящего изобретения, который определяется нижеследующей формулой.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам медицинского обследования внутренних полостей или трубовидных органов. Блок управления эндоскопом содержит управляющие средства, по меньшей мере один канал управления, связанный с управляющими средствами и выполненный с возможностью передачи управляющих воздействий от управляющих средств блока управления эндоскопом к вводимой части эндоскопа, и соединительные средства, выполненные с возможностью разъемного соединения блока управления эндоскопом с вводимой частью эндоскопа с обеспечением соединения каждого канала управления блока управления эндоскопом с соответствующим каналом управления вводимой части эндоскопа, причем соединение каналов управления обеспечено посредством соединительных средств, расположенных по окружности на дистальном конце блока управления эндоскопом, и соответствующих ответных элементов, расположенных по окружности на проксимальном конце вводимой части эндоскопа. Вводимая часть эндоскопа содержит по меньшей мере один канал управления вводимой части эндоскопа, выполненный с возможностью передачи управляющих воздействий от блока управления эндоскопом для управления вводимой частью эндоскопа, и соединительные средства вводимой части эндоскопа, выполненные с возможностью разъемного соединения вводимой части эндоскопа с блоком управления эндоскопом с обеспечением соединения каждого канала управления вводимой части эндоскопа с соответствующим каналом управления блока управления эндоскопом, причем соединение каналов управления обеспечено посредством соединительных средств вводимой части эндоскопа, расположенных по окружности на ее проксимальном конце, и соответствующих соединительных средств блока управления эндоскопом, расположенных по окружности на дистальном конце блока управления эндоскопом. Модульная видеоэндоскопическая система содержит блок управления эндоскопом, вводимую часть эндоскопа и видеоинформационный модуль, выполненный с возможностью соединения с блоком управления эндоскопом. Использование изобретений позволяет упростить управление видеоэндоскопической системой. 3 н. и 20 з.п. ф-лы, 16 ил.
Формула
1. Блок управления эндоскопом, содержащий:
Комментарии