Сеноуборочная машина - RU2579496C2
Код документа: RU2579496C2
Чертежи



Описание
Изобретение относится к сеноуборочной машине, в частности к валкоукладчику для укладки в валки лежащих на земле трав.
Валкоукладчики предназначены для сбора скошенного и лежащего на земле фуража, причем эти машины имеют ротор и подвижные орудия, позволяющие собирать фураж в валки, которые в дальнейшем подбирают, например, при помощи пресс-подборщиков.
Валкоукладчики содержат несущую конструкцию, включающую в себя главную балку, с которой шарнирно соединена, по меньшей мере, одна боковая штанга, которая выполнена с возможностью перемещения вокруг оси при помощи силового цилиндра и на которой установлен, по меньшей мере, один ротор-валкоукладчик. Обычно валкоукладчики содержат несколько роторов, смещенных вдоль несущей конструкции таким образом, чтобы охватывать большую рабочую площадь во время перемещения сельскохозяйственной машины на поле или на лугу.
Сельскохозяйственные машины работают на полях любого типа, поэтому используемые механизаторами орудия и оборудование должны быть выполнены с возможностью адаптации к рельефу этих полей.
Валкоукладчику приходится работать на склонах или на полях с неровной поверхностью или на полях с препятствиями. Для обеспечения этой работы ротор валкоукладчика обычно обладает определенной свободой движения, чтобы следовать контурам земли, кроме того, имеются устройства для подъема рабочих орудий.
В настоящее время свобода движения ротора во время работы не регулируется, и смещения орудий не контролируются с достаточной точностью. Следовательно, шарнир между штангой-держателем ротора и самим ротором подвергается значительным напряжениям, поэтому возникает необходимость в контроле смещения ротора во время работы и во время перемещений.
Когда работа в поле требует подъема ротора, например, чтобы преодолеть препятствие, или когда ротор убирают в вертикальное положение для транспортировки вне рабочей зоны, следует избегать любых несвоевременных движений, которые могут привести к повреждению шарнира и самого ротора, если ротор столкнется с рамой. Таким образом, возникает проблема блокировки смещения ротора, когда он не находится в рабочем положении.
Задача изобретения состоит в устранении вышеуказанных недостатков за счет создания устройства блокировки возможных смещений ротора, когда он находится в нерабочем состоянии.
Поставленная задача решена в сеноуборочной машине, в частности валкоукладчике, содержащем несущую конструкцию, включающую в себя главную балку, с которой шарнирно соединена, по меньшей мере, одна боковая штанга, на которой установлен, по меньшей мере, один ротор-валкоукладчик, при этом ротор соединен с несущим устройством, образующим средство взаимодействия с держателем, установленным на указанной боковой штанге, при этом несущее устройство позволяет ротору смещаться, чтобы следовать неровностям земли, когда машина работает и находится в рабочем положении, при этом машина отличается тем, что несущее устройство содержит систему регулирования, позволяющую ограничивать движения ротора в рабочем положении и блокировать их в других положениях, и тем, что система регулирования, позволяющая ограничивать движения ротора, содержит, с одной стороны, приводное средство, содержащее, по меньшей мере, один гидравлический силовой цилиндр, и, с другой стороны, соединительное устройство, перемещаемое указанным, по меньшей мере, одним гидравлическим силовым цилиндром.
Устройство в соответствии с изобретением имеет целый ряд преимуществ:
- смещения ротора во время работы являются контролируемыми и в определенной степени амортизируются при помощи гидравлического силового цилиндра или гидравлических силовых цилиндров, что позволяет уменьшить механические воздействия на шарнир между штангой-держателем ротора и ротором,
- вне рабочего положения гидравлический силовой цилиндр или гидравлические силовые цилиндры могут блокировать любое несвоевременное движение ротора, что обеспечивает высокий уровень безопасности при транспортировке машины,
- синхронизация гидравлического силового цилиндра или гидравлических силовых цилиндров с силовым цилиндром складывания штанги-держателя ротора позволяет избежать происшествий, в частности столкновения ротора с главной балкой, при этом указанная синхронизация позволяет также приводить в действие два разных элемента посредством одной команды из кабины управления, что представляет интерес при прохождении препятствий на поле и позволяет избегать возможных ошибок механизатора при подаче команд управления различными силовыми цилиндрами в определенном порядке,
- силовые цилиндры синхронизированы, и различные элементы расположены таким образом, чтобы можно было получить промежуточное положение, в котором ротор расположен, по существу, параллельно над землей, например приподнят для прохождения препятствия, будучи при этом заблокированным от смещения, чтобы избежать несвоевременных движений.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
На фиг.1 показан общий вид валкоукладчика в соответствии с изобретением;
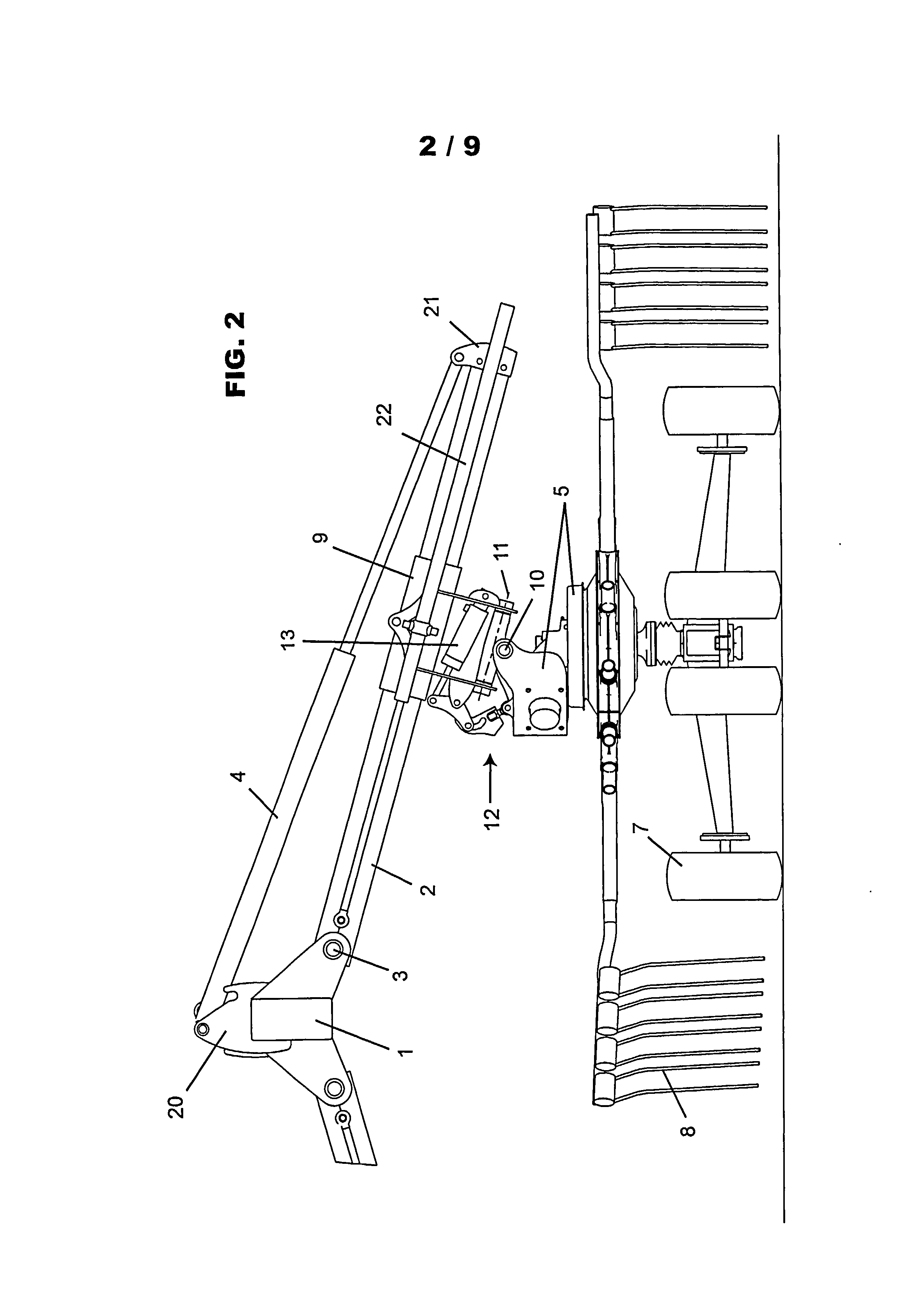
на фиг.2 показан увеличенный вид ротора согласно первому варианту осуществления, в рабочем положении;
на фиг.3 показан ротор согласно первому варианту осуществления в приподнятом положении, в котором он частично приподнят над землей в положении частичного убирания для прохождения над препятствием или для маневрирования в конце поля;
на фиг.4 показан ротор согласно первому варианту осуществления в положении транспортировки. Ротор поднят в вертикальное положение вместе с боковой штангой;
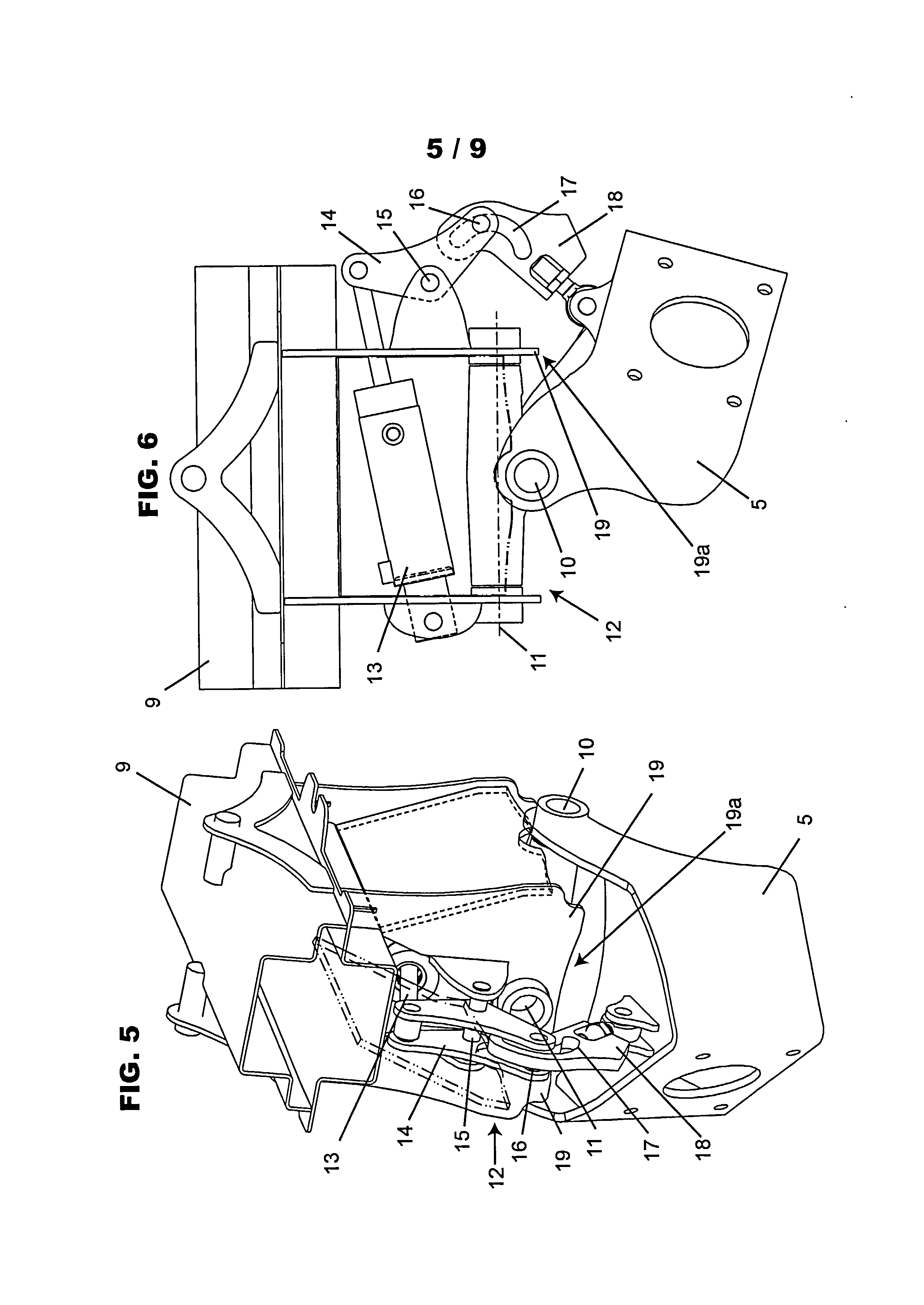
на фиг.5 показан фронтальный вид устройства регулирования согласно первому варианту осуществления;
на фиг.6 показан вид сбоку устройства регулирования согласно первому варианту осуществления;
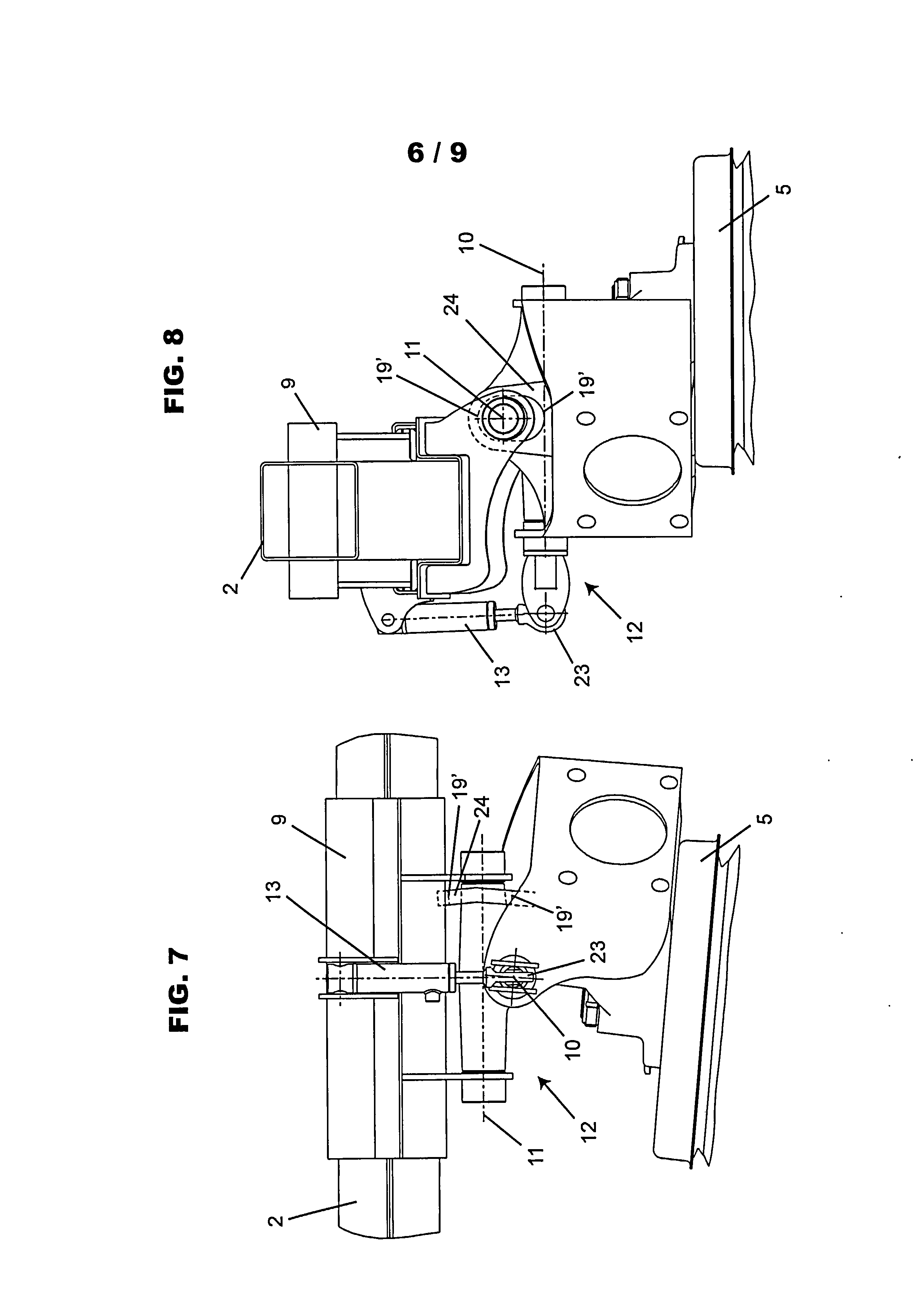
на фиг.7 показан вид сбоку устройства регулирования согласно второму варианту осуществления;
на фиг.8 показан фронтальный вид устройства регулирования согласно второму варианту осуществления;
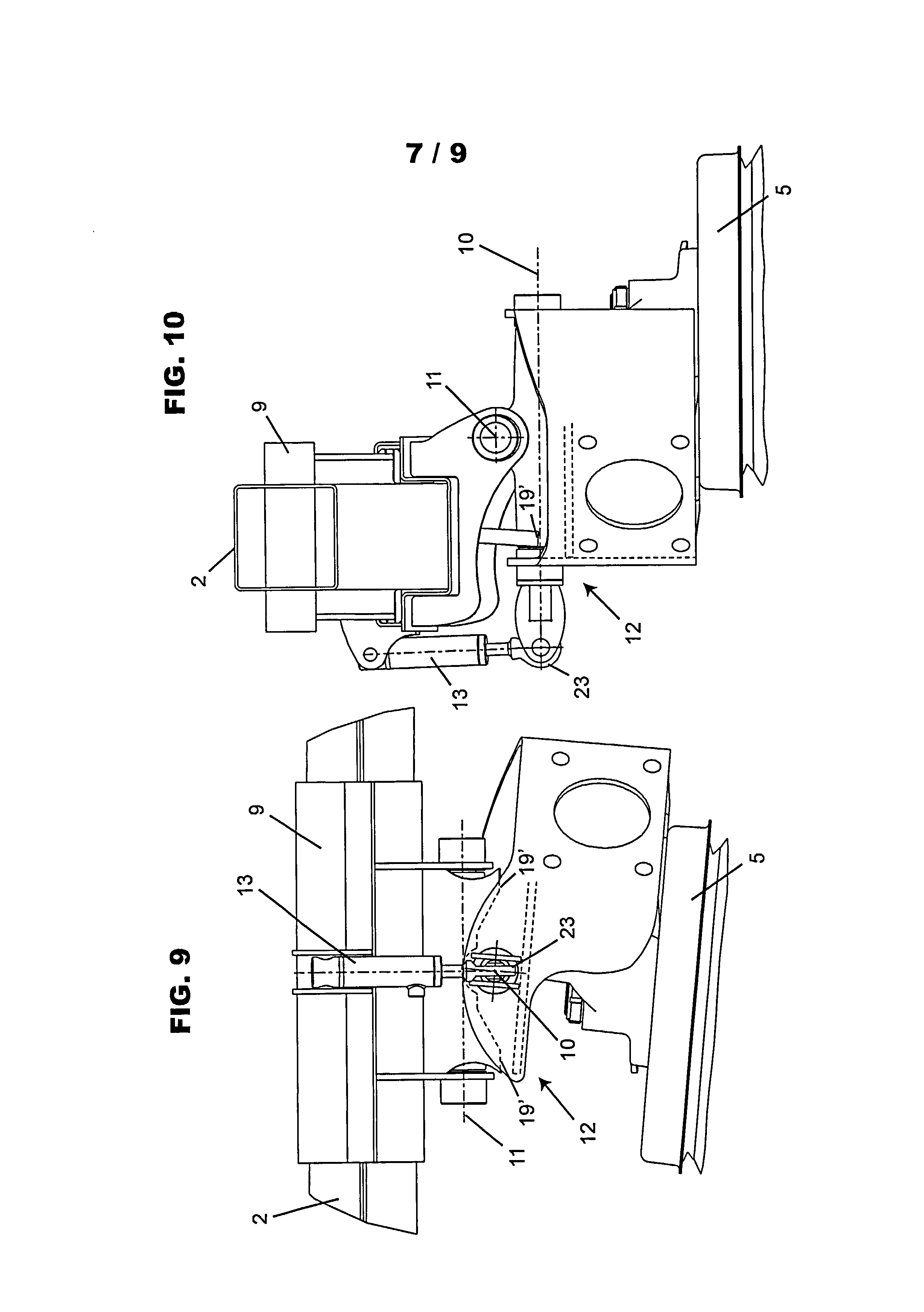
на фиг.9 показан вид сбоку устройства регулирования согласно третьему варианту осуществления;
на фиг.10 показан фронтальный вид устройства регулирования согласно третьему варианту осуществления;
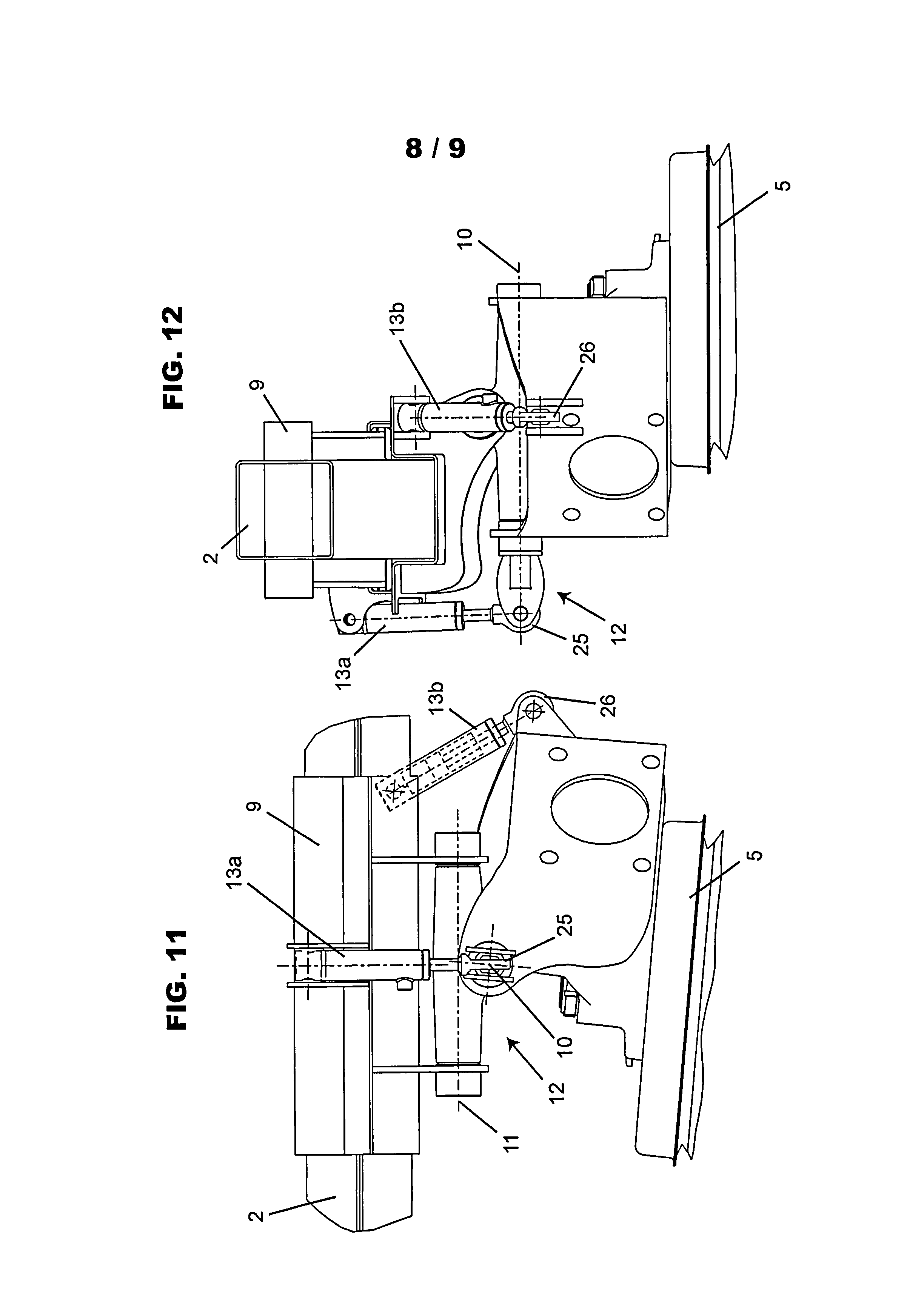
на фиг.11 показан вид сбоку устройства регулирования согласно четвертому варианту осуществления;
на фиг.12 показан фронтальный вид устройства регулирования согласно четвертому варианту осуществления;
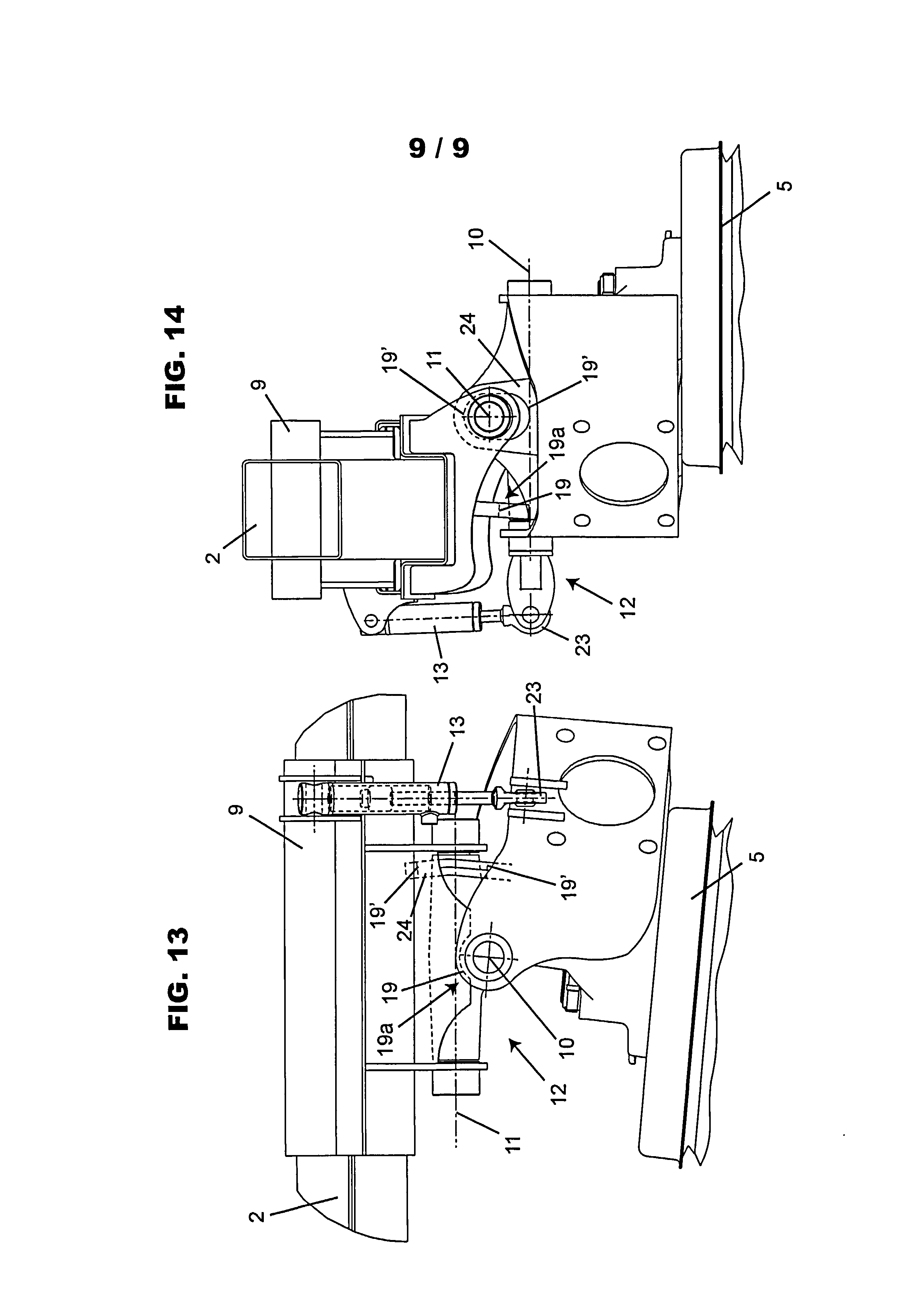
на фиг.13 показан вид сбоку устройства регулирования согласно пятому варианту осуществления;
на фиг.14 показан фронтальный вид устройства регулирования согласно пятому варианту осуществления.
Как показано на фиг.1, валкоукладчик для укладки в валки лежащих на земле трав в соответствии с изобретением содержит несущую конструкцию, содержащую главную балку 1, с которой шарнирно соединена, по меньшей мере, одна боковая штанга 2, подвижная вокруг горизонтальной оси 3. Боковая штанга 2 может перемещаться вокруг оси 3 при помощи силового цилиндра 4 складывания.
Силовой цилиндр 4 складывания предназначен для раскладывания и складывания боковой штанги-держателя 2 ротора-валкоукладчика 5 между положением транспортировки, в котором боковая штанга 2 расположена по существу вертикально, и рабочим положением, в котором она наклонена в направлении земли. Кроме того, боковую штангу 2 можно переместить в приподнятое положение, в котором ротор 5 приподнят над землей. Это приподнятое положение находится между рабочим положением и положением транспортировки и позволяет, например, проходить над валком.
Как показано на фиг.1, валкоукладчик обычно содержит средства 6 трансмиссии, позволяющие приводить во вращение часть каждого ротора 5 вокруг по существу вертикальной оси в рабочем положении, при этом на указанной оси установлена колесная пара 7, поддерживающая ротор 5. Различные орудия 8, установленные на роторе 5, расположены на штангах, установленных в центральном корпусе, который вращается вокруг указанной по существу вертикальной оси.
Орудия 8, обычно представляющие собой вилы, собирают находящийся на земле скошенный фураж и укладывают его в валки, которые затем может подбирать другая машина. Как известно, по обе стороны от главной балки 1 расположены несколько роторов для охвата большой площади поля и для ограничения числа валков, собираемых на следующем этапе.
На фиг.2 в увеличенном виде показан ротор 5 в рабочем положении. Этот ротор 5 может поворачиваться вокруг первой оси 10 и второй оси 11, которые соединяют его с держателем 9, таким образом, чтобы следовать неровностям поля. Держатель 9 выполнен с возможностью перемещения на соответствующей боковой штанге 2 при помощи гидравлического силового цилиндра 22.
Согласно изобретению, смещения ротора 5 возможны в рабочем положении вокруг первой оси 10 и второй оси 11, которые являются по существу перпендикулярными, при этом первая ось 10 находится в плоскости, параллельной земле и ориентирована в направлении движения A машины, вторая ось 11 перпендикулярна к направлению движения и может иметь более или менее значительный наклон относительно горизонтали, когда машина находится в рабочем положении.
Как показано на различных фигурах, ротор 5 соединен с держателем через несущее устройство 12, содержащее первую ось 10 и вторую ось 11 и обеспечивающее смещения, позволяющие следовать неровностям поля, когда машина работает и находится в рабочем положении. Согласно изобретению несущее устройство 12 содержит систему регулирования, позволяющую ограничивать движения ротора 5 вокруг первой оси 10 и второй оси 11 в рабочем положении и блокировать их в других положениях или в любом другом положении.
Согласно изобретению, система регулирования, позволяющая ограничивать движения ротора 5, содержит, с одной стороны, приводное средство, содержащее, по меньшей мере, один гидравлический силовой цилиндр 13, 13a, 13b, и, с другой стороны, соединительное устройство, перемещаемое указанным, по меньшей мере, одним гидравлическим силовым цилиндром 13, 13a, 13b. На фиг.2-10, а также 13 и 14 представлены варианты осуществления, содержащие только один гидравлический силовой цилиндр 13, тогда как на фиг.11 и 12 представлен вариант осуществления, в котором применяют два гидравлических силового цилиндра 13a, 13b.
Согласно важному отличительному признаку изобретения, указанный, по меньшей мере, один гидравлический силовой цилиндр 13, 13a, 13b соединен, с одной стороны, с ротором 5 при помощи соединительного устройства и, с другой стороны, с держателем 9.
В первом варианте осуществления, в частности, как показано на фиг.5 и 6, соединительное устройство содержит коромысло 14, шарнирно соединенное с осью 15 несущего устройства 12. Кроме того, указанное коромысло 14 соединено с гидравлическим силовым цилиндром 13 и выполнено с возможностью поворота вокруг оси 15 под действием указанного гидравлического силового цилиндра 13.
Кроме того, коромысло 14 дополнительно содержит ось 16, которая заходит в гнездо 17 вытянутой формы, выполненное в лапе 18, шарнирно соединенной с ротором 5 и позволяющее ограничить повороты вокруг первой оси 10.
В этом варианте осуществления система регулирования содержит средство упора 19a между ротором и держателем 9 для ограничения поворотов вокруг второй оси 11, при этом указанное средство упора 19a содержит два упора 19.
Когда гидравлический силовой цилиндр 13 находится в выдвинутом положении, как показано на фиг.5 и 6, то есть когда ротор 5 находится в рабочем положении, ось 16 находится в среднем положении в гнезде 17, поэтому возможно смещение в две стороны от этого положения. Следовательно, может происходить ограниченное движение вращения вокруг первой оси 10, позволяющее следовать контуру поля.
В этом же положении ротор 5 может также иметь свободу движения вокруг второй оси 11, что соответственно позволяет производить смещение в трех пространственных измерениях.
Гидравлический силовой цилиндр 13 является, например, одноступенчатым силовым цилиндром, управляемым при помощи давления, когда его необходимо укоротить. Когда гидравлический силовой цилиндр 13 переводят в убранное положение с сокращением, как показано на фиг.3 и 4, коромысло 14 поворачивается до момента, когда ось 16 придет к концу своего хода в гнезде 17, и поворачивает ротор 5 вверх вокруг первой оси 10. В этот момент какое-либо смещение вокруг первой оси 10 становится невозможным.
Подъем ротора 5 в направлении держателя 9 тоже приводит к контакту упоров 19, предусмотренных на несущем устройстве 12, с верхней частью ротора 5, блокируя этим действием возможное вращение вокруг второй оси 11.
Таким образом, действие сокращения гидравлического силового цилиндра 13 приводит к повороту ротора 5 в направлении главной балки 1 и к одновременной блокировке двух возможных смещений ротора 5 вокруг первой оси 10 и второй оси 11.
Во втором и третьем вариантах осуществления, представленных на фиг.7-10, соединительное устройство представляет собой шарнир 23. Эти варианты осуществления предусматривают использование только одного гидравлического силового цилиндра 13, который соединен с ротором 5 при помощи указанного шарнира 23. Предпочтительно шарнир 23 является шаровым шарниром. Кроме того, гидравлический силовой цилиндр 13 расположен в плоскости, проходящей через первую ось 10. В этих двух вариантах осуществления система регулирования содержит два упора 19′ между ротором 5 и держателем 9 для ограничения поворотов вокруг первой оси 10. Во втором варианте осуществления, представленном на фиг.7 и 8, вторая ось 11 может перемещаться в ограниченных пределах внутри вытянутого отверстия, выполненного в лапе 24, неподвижно соединенной с ротором 5, при этом концы вытянутого отверстия образуют два упора 19′. В третьем варианте осуществления, показанном на фиг.9 и 10, держатель 9 имеет две стороны, образующие упоры 19′, и ротор 5 может входить в контакт с одной или другой из этих сторон, когда он поворачивается вокруг первой оси 10. Упоры 19′ выполнены с возможностью обеспечения достаточного поворота ротора 5 вокруг первой оси 10 во время работы, чтобы следовать неровностям поля.
Гидравлический силовой цилиндр 13 является, например, одноступенчатым силовым цилиндром, управляемым при помощи давления, когда его необходимо укоротить. Во время работы гидравлический силовой цилиндр 13 является плавающим, то есть не управляется давлением и может свободно удлиняться и сокращаться в зависимости от движений ротора вокруг второй оси 11. Гидравлический силовой цилиндр 13 можно выполнить таким образом, чтобы во время работы поворот ротора вокруг второй оси 11 не приводил гидравлический силовой цилиндр в положение максимального удлинения или в положение максимального сокращения. В альтернативном варианте гидравлический силовой цилиндр 13 можно выполнить таким образом, чтобы во время работы он мог приходить в свои положения конца хода, чтобы ограничивать повороты ротора 5 вокруг второй оси 11. Во время работы ротор 5 имеет также свободу движения вокруг первой оси 10, что обеспечивает возможное смещение в трех пространственных измерениях.
Когда гидравлический силовой цилиндр 13 переводят в сокращенное положение, его действие заставляет ротор 5 повернуться вокруг второй оси 11, и больше невозможно никакое смещение вокруг второй оси 11. Во втором варианте осуществления, как показано на фиг.7, когда боковая штанга 2 поворачивается из рабочего положения в приподнятое положение или в положение транспортировки, собственный вес ротора 5 приводит к перемещению оси 11 внутри вытянутого отверстия, и ось 11 приходит в положение опоры на нижний упор 19′, наиболее удаленный от несущей штанги 2. Как показано на фиг.9, сокращение гидравлического силового цилиндра 13 приводит в третьем варианте осуществления к приходу ротора 5 в положение опоры на упоры 19′.
В четвертом варианте осуществления, представленном на фиг.11 и 12, соединительное устройство образовано шарнирами 25, 26. Приводное средство содержит первый силовой цилиндр 13a, соединенный с ротором 5 через шарнир 25, а также второй силовой цилиндр 13b, соединенный с ротором 5 через шарнир 26. Предпочтительно шарниры 25, 26 являются шаровыми шарнирами.
Этот четвертый вариант осуществления предпочтительно предусматривает, чтобы первый гидравлический силовой цилиндр 13a находился в плоскости, проходящей через первую ось 10, и чтобы второй гидравлический силовой цилиндр 13b находился в плоскости, проходящей через вторую ось 11.
Первый и второй гидравлические силовые цилиндры 13a, 13b являются, например, одноступенчатыми, управляемыми при помощи давления, когда их необходимо укоротить. Во время работы первый и второй гидравлические силовые цилиндры 13a, 13b являются плавающими, то есть не управляются давлением и могут свободно удлиняться и сокращаться в зависимости от движений ротора вокруг первой оси 10 и второй оси 11.
Первый гидравлический силовой цилиндр 13a можно выполнить таким образом, чтобы во время работы поворот ротора вокруг второй оси 11 не приводил первый гидравлический силовой цилиндр 13a в положение максимального удлинения или в положение максимального сокращения. В альтернативном варианте первый гидравлический силовой цилиндр 13a можно выполнить таким образом, чтобы во время работы он мог приходить в свои положения конца хода, чтобы ограничивать повороты ротора 5 вокруг второй оси 11. Второй гидравлический силовой цилиндр 13b можно выполнить таким образом, чтобы во время работы поворот ротора вокруг первой оси 10 не приводил второй гидравлический силовой цилиндр 13b в положение максимального удлинения или в положение максимального сокращения. В альтернативном варианте второй гидравлический силовой цилиндр 13b можно выполнить таким образом, чтобы во время работы он мог приходить в свои положения конца хода, чтобы ограничивать повороты ротора 5 вокруг первой оси 10. Во время работы ротор 5 имеет определенную свободу движения вокруг первой оси 10 и второй оси 11, что обеспечивает возможное смещение в трех пространственных измерениях.
Когда первый гидравлический силовой цилиндр 13a переводят в сокращенное положение, его действие заставляет ротор 5 повернуться вокруг второй оси 11, и больше невозможно никакое смещение вокруг второй оси 11. Когда второй гидравлический силовой цилиндр 13b переводят в сокращенное положение, его действие заставляет ротор 5 повернуться в направлении главной балки 1 вокруг первой оси 10, и больше невозможно никакое смещение вокруг первой оси 10. Таким образом, действие сокращения первого и второго гидравлических силовой цилиндров 13a, 13b блокирует одновременно два возможных смещения ротора 5 вокруг первой оси 10 и второй оси 11.
В пятом варианте осуществления, показанном на фиг.13 и 14, соединительное устройство образовано шарниром 23. Этот вариант осуществления предусматривает использование только одного гидравлического силового цилиндра 13, который соединен с ротором 5 при помощи указанного шарнира 23. Предпочтительно шарнир 23 является шаровым шарниром. Кроме того, гидравлический силовой цилиндр 13 расположен в плоскости, имеющей наклон относительно направления движения A. В верхней проекции машины эта плоскость образует с плоскостью, параллельной направлению движения A, угол, приблизительно находящийся в пределах от 10° до 80°, например, приблизительно равный 45°.
В этом варианте осуществления система регулирования содержит два упора 19′, находящиеся между ротором 5 и держателем 9, чтобы ограничивать повороты вокруг первой оси 10. Кроме того, система регулирования содержит средство упора 19a, содержащее упор 19, находящийся между ротором 5 и держателем 9, чтобы ограничивать повороты вокруг второй оси 11. Вторая ось 11 может перемещаться в ограниченных пределах внутри вытянутого отверстия, выполненного в лапе 24, неподвижно соединенной с ротором 5, при этом концы вытянутого отверстия образуют два упора 19′. Упор 19 образован опорной стороной, неподвижно соединенной с держателем 9, с которой может входить в контакт первая ось 10.
Гидравлический силовой цилиндр 13 является, например, одноступенчатым силовым цилиндром, управляемым при помощи давления, когда его необходимо укоротить. Во время работы гидравлический силовой цилиндр 13 является плавающим, то есть не управляется давлением и может свободно удлиняться и сокращаться в зависимости от движений ротора вокруг первой оси 10 и второй оси 11. Таким образом, во время работы ротор 5 имеет возможность смещаться в трех пространственных измерениях.
Когда гидравлический силовой цилиндр 13 переводят в сокращенное положение, то в силу своего расположения в наклонной плоскости он заставляет ротор 5 повернуться в направлении главной балки 1 одновременно вокруг первой оси 10 и второй оси 11. При этом первая ось 10 приходит в положение опоры на упор 19, тогда как вторая ось 11 приходит в положение опоры на нижний упор 19′, наиболее удаленный от несущей штанги 2. В результате становится невозможным какое-либо смещение вокруг первой оси 10 и второй оси 11.
Держатель 9 может перемещаться скольжением под действием гидравлического силового цилиндра 22 вдоль боковой штанги 2 таким образом, чтобы расположить ротор 5 наиболее оптимально в зависимости от числа используемых роторов и от конфигурации, необходимой для работы.
На фиг.3 показан ротор в приподнятом положении для прохождения над препятствием или для маневрирования в конце поля. В этом положении гидравлический силовой цилиндр 13 и коромысло 14 приводятся в действие таким образом, чтобы удерживать ротор 5 неподвижным по существу в горизонтальном положении, промежуточном между рабочим положением и положением транспортировки. Во втором и третьем вариантах осуществления это по существу горизонтальное приподнятое положение можно получить за счет соответствующего осуществления упоров 19′, на которые опирается ротор. В четвертом варианте осуществления первый и второй гидравлические силовые цилиндры 13a, 13b приводятся в действие таким образом, чтобы удерживать ротор 5 неподвижным в этом по существу горизонтальном положении. В пятом варианте осуществления ротор 5 удерживают неподвижным в этом по существу горизонтальном положении, приводя в действие гидравлический силовой цилиндр 13.
На фиг.4 ротор показан в положении транспортировки. Ротор 5 поднят, и боковая штанга 2 находится в по существу вертикальном положении. Кроме того, ротор переместился вдоль боковой штанги 2 к главной балке 1, чтобы уменьшить высоту машины.
Переход между рабочим положением, промежуточным положением и положением транспортировки происходит под действием силового цилиндра 4 складывания. Расположение этого силового цилиндра 4 относительно главной балки 1 и относительно боковой штанги 2 показано на фиг.2-4.
Таким образом, согласно изобретению, силовой цилиндр 4 складывания боковой штанги 2 с установленным на ней ротором 5 расположен между элементом 20 соединения с главной балкой 1 и по существу наружным концом 21 указанной боковой штанги 2 таким образом, чтобы позволить перемещение боковой штанги 2 между положением наклона в направлении земли, рабочим положением и положением транспортировки, в котором боковая штанга 2 расположена более или менее вертикально относительно земли, при этом перемещение происходит за счет вращения вокруг оси 3.
Предпочтительно силовой цилиндр 4 складывания и гидравлический силовой цилиндр или гидравлические силовые цилиндры 13, 13a, 13b приводного средства синхронизированы таким образом, чтобы движение боковой штанги 2 в направлении вертикального положения приводило к сокращению гидравлического силового цилиндра или гидравлических силовых цилиндров 13, 13a, 13b, обеспечивающему блокировку возможных смещений ротора 5.
Благодаря синхронизации, частичное складывание боковой штанги 2 для приведения силового цилиндра 4 складывания в по существу горизонтальное положение относительно земли приводит к сокращению гидравлического силового цилиндра или гидравлических силовых цилиндров 13, 13a, 13b, чтобы перевести ротор 5 в по существу горизонтальное положение, приподнятое над землей, например, для прохождения препятствия.
Синхронизация приводит также к тому, что движение боковой штанги 2 в рабочее положение за счет удлинения гидравлического силового цилиндра 4 приводит к удлинению гидравлического силового цилиндра или гидравлических силовых цилиндров 13, 13a, 13b с целью разблокировки ротора 5, как только он приходит в рабочее положение.
Возможны различные версии осуществления, в частности, валкоукладчик может содержать разное число роторов 5 и разные орудия 8, при этом размеры роторов 5 могут быть более или менее значительными, и их можно располагать более или менее высоко относительно земли, не выходя за рамки изобретения.
Что касается системы регулирования, позволяющей ограничивать перемещение ротора 5, различные детали можно выполнять по-разному и можно располагать в другой конфигурации в системе регулирования, в частности, что касается точек крепления на держателе 9, формы упоров 19, 19′ или коромысла 14 или амплитуды гидравлического силового цилиндра или гидравлических силовых цилиндров 13, 13a, 13b, не выходя за рамки изобретения.
Представленное выше описание изобретения относится к ротору-валкоукладчику 5, установленному на несущей боковой штанге 2, однако можно предусмотреть машины большой ширины с несколькими роторами 5, установленными на одной штанге 2, не выходя за рамки изобретения.
Разумеется, изобретение не ограничивается описанными и представленными в качестве примеров вариантами осуществления и включает в себя все технические эквиваленты, а также их комбинации.
Реферат
Изобретение относится к сеноуборочной машине, в частности валкоукладчику, содержащему несущую конструкцию, включающую в себя главную балку, с которой шарнирно соединена по меньшей мере одна боковая штанга, на которой установлен по меньшей мере один ротор-валкоукладчик. Ротор соединен с несущим устройством, образующим средство взаимодействия с держателем, который установлен на указанной боковой штанге. Несущее устройство позволяет ротору смещаться, чтобы следовать неровностям земли, когда машина работает и находится в рабочем положении. Несущее устройство содержит систему регулирования, позволяющую ограничивать перемещения ротора в рабочем положении и блокировать их в других положениях. Система регулирования, позволяющая ограничивать перемещения ротора, содержит приводное средство, которое содержит по меньшей мере один гидравлический силовой цилиндр. Использование данного изобретения позволяет осуществить блокировку ротора, когда он находится в нерабочем положении. 22 з.п. ф-лы, 14 ил.
Комментарии