Стиральная машина - RU2303668C2
Код документа: RU2303668C2
Чертежи



Описание
Настоящее изобретение относится к стиральной машине для осуществления процессов стирки, полоскания и отжима во вращающемся барабане, имеющем горизонтальную или наклонную ось вращения, а конкретнее к стиральной машине, в которой можно регулировать частоту вращения барабана посредством обнаружения его смещения в начале процесса отжима.
Для обычной стиральной машины для осуществления процессов стирки, полоскания и отжима во вращающемся барабане, имеющем горизонтальную или наклонную ось вращения, предложен способ регулирования вращения барабана во время отжима посредством обнаружения неравномерности распределения белья во вращающемся барабане (см. выложенную заявку на патент Японии № 2003-326093).
Согласно способу, описанному в вышеупомянутой заявке, во время процесса отжима барабан ускоряют вплоть до первой скорости вращения в 50 об/мин, а затем медленно ускоряют вплоть до второй скорости вращения в 70 об/мин. После этого барабан ускоряют вплоть до третьей скорости вращения в 100 об/мин, которая находится между второй скоростью вращения и резонансной скоростью вращения в 120 об/мин, и регулируют для поддержания этой третьей скорости вращения в течение определенного периода времени. В это время осуществляют первое определение S1 неравномерного распределения белья. В том случае, если первое определение S1 указывает на низкую степень неравномерности вращения, то тем самым делается вывод о том, что внутри барабана белье не находится в неравномерно распределенном состоянии, и вращающийся барабан ускоряют вплоть до четвертой скорости вращения в 170 об/мин, и при этом осуществляют второе определение S2 неравномерного распределения таким же самым образом, как и при первом определении S1.
В том случае, если из второго определения S2 неравномерности следует вывод о том, что белье во вращающемся барабане не находится в неравномерно распределенном состоянии, то ускоряют вращающийся барабан до скорости вращения в 900 об/мин, которая является установившейся скоростью вращения в высокоскоростном диапазоне при процессе отжима, и затем в течение определенного периода времени поддерживают эту установившуюся скорость вращения. После этого останавливают барабан для окончания процесса отжима.
Однако при применении в вышеупомянутой обычной стиральной машине этот обычный способ определения неравномерного распределения белья по неравномерности вращения барабана имеет недостатки, состоящие в том, что это определение осуществляют косвенным образом, и, кроме того, точность этого способа является недостаточной из-за, например, различий в белье или в условиях установки стиральной машины.
Следовательно, целью настоящего изобретения является создание стиральной машины, в которой можно уменьшать вибрацию или шум во время процесса отжима посредством определения с высокой точностью вибрации бака для воды во время процесса отжима, при этом вибрация возникает вследствие неравномерного распределения белья во вращающемся барабане, имеющем горизонтальную или наклонную ось вращения.
Согласно настоящему изобретению предлагается стиральная машина, содержащая вращающийся барабан для размещения в нем белья, при этом вращающийся барабан имеет горизонтальную или наклонную ось вращения; бак для воды с возможностью вибрации, поддерживаемый в корпусе стиральной машины, при этом вращающийся барабан с возможностью вращения установлен в баке для воды, электродвигатель для привода во вращение вращающегося барабана; программатор для программирования работы стиральной машины; устройство управления для управления электродвигателем и работой стиральной машины, запрограммированной программатором, причем устройство управления содержит микрокомпьютер; и устройство обнаружения смещения для обнаружения смещения бака для воды, при этом устройство обнаружения смещения содержит катушку возбуждения, по меньшей мере, две детекторные катушки, соосные с катушкой возбуждения, и сердечник, который может перемещаться вдоль оси, при этом одна из детекторных катушек и сердечник могут перемещаться согласно смещению бака для воды, и при этом конец катушки возбуждения соединен с концом одной из детекторных катушек, а также с концом другой из детекторных катушек, образуя нейтральную точку, соединяющуюся с опорным напряжением 0V электроэнергии микрокомпьютера.
При таком выполнении величина вибрации бака для воды вследствие неравномерного распределения белья во вращающемся барабане может быть непосредственно обнаружена в виде величины его смещения посредством устройства обнаружения смещения, выходное напряжение которого может быть непосредственно обнаружено микрокомпьютером, установленным в устройстве управления, что тем самым дает возможность с высокой точностью и без задержки обнаруживать вибрацию во время процесса отжима, чтобы на основе результата обнаружения можно было осуществлять регулирование скорости вращения электродвигателя для значительного уменьшения вибрации и шума во время процесса отжима.
Стиральная машина согласно настоящему изобретению дает возможность непосредственно обнаруживать вибрацию бака для воды, которая возникает вследствие неравномерного распределения белья и которая особенно заметна в стиральной машине барабанного типа, так чтобы можно было надежно уменьшать вибрацию и шум во время процесса отжима.
Вышеуказанные и другие цели и отличительные признаки настоящего изобретения станут очевидными из последующего описания предпочтительных вариантов осуществления изобретения со ссылкой на сопровождающие чертежи, на которых:
фиг. 1 - вид сбоку в разрезе стиральной машины согласно первому варианту осуществления настоящего изобретения,
фиг. 2 - перспективный вид датчика обнаружения смещения в стиральной машине согласно первому варианту осуществления настоящего изобретения,
фиг. 3 - блок-схема стиральной машины согласно первому варианту осуществления настоящего изобретения,
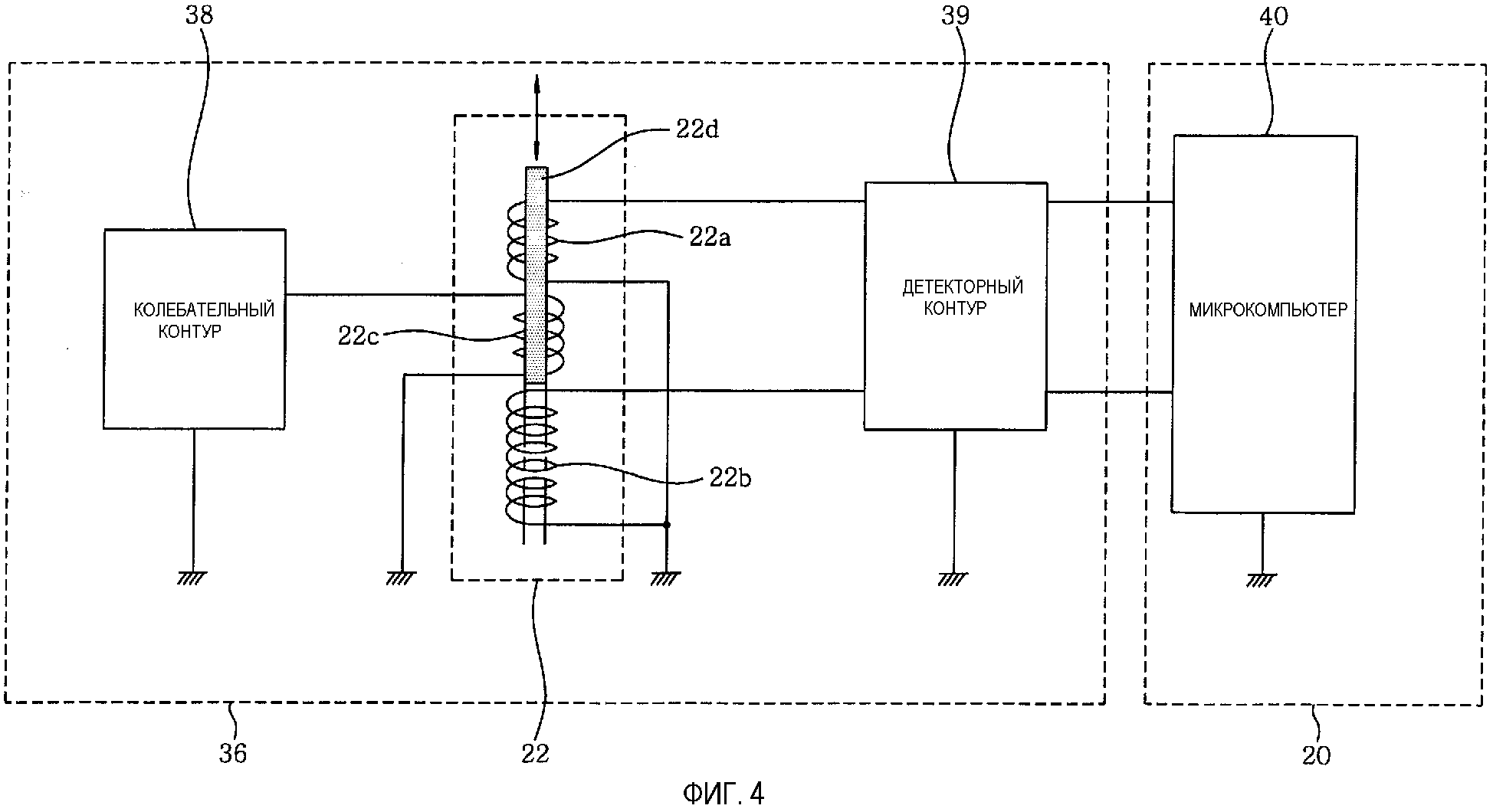
фиг. 4 - подробная блок-схема устройства обнаружения смещения в стиральной машине согласно первому варианту осуществления настоящего изобретения,
фиг. 5 - график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно второму варианту осуществления настоящего изобретения,
фиг. 6 - график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно третьему варианту осуществления настоящего изобретения,
фиг. 7 - график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно четвертому варианту осуществления настоящего изобретения,
фиг. 8 - график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно пятому варианту осуществления настоящего изобретения, и
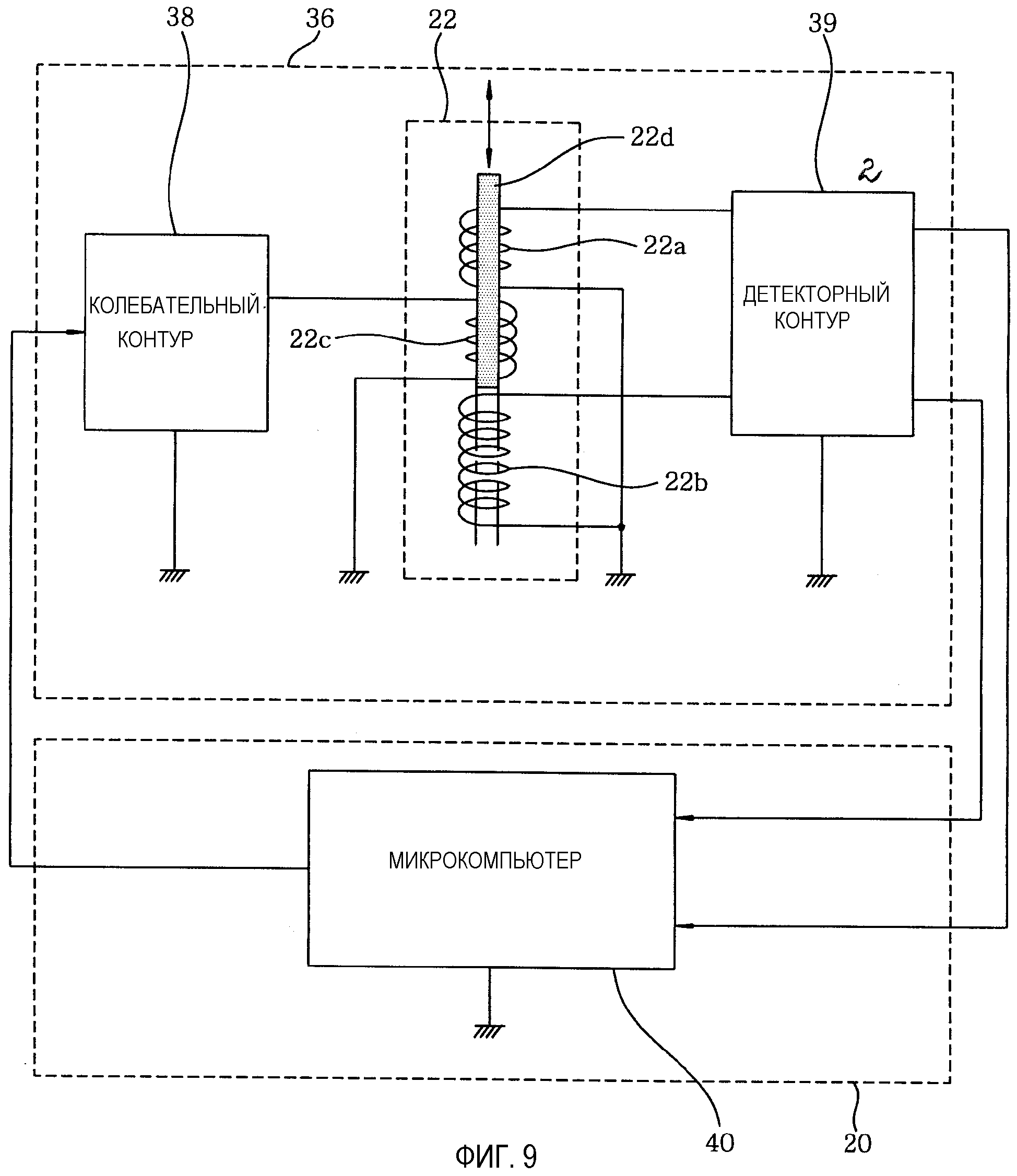
фиг. 9 - подробная блок-схема устройства обнаружения смещения в стиральной машине согласно пятому варианту осуществления настоящего изобретения.
Далее будут описаны предпочтительные варианты осуществления настоящего изобретения со ссылкой на сопровождающие чертежи. Однако настоящее изобретение не следует истолковывать как ограниченное ими.
На фиг. 1 показан вид сбоку в разрезе стиральной машины согласно первому варианту осуществления настоящего изобретения, на фиг. 2 - перспективный вид датчика обнаружения смещения в стиральной машине согласно первому варианту осуществления настоящего изобретения, на фиг. 3 - блок-схема стиральной машины согласно первому варианту осуществления настоящего изобретения и на фиг. 4 - блок-схема устройства обнаружения смещения в стиральной машине согласно первому варианту осуществления настоящего изобретения.
Как показано на фиг. 1-4, цилиндрический барабан 1, имеющий дно, с возможностью вращения установлен в баке 3 для воды. Барабан 1, который имеет множество отверстий 2 по всей своей цилиндрической поверхности и вал 4 в центре (центральная ось вращения), расположен таким образом, что его центральная ось вращения наклонена к задней части стиральной машины. Электродвигатель 5, установленный на задней стороне бака 3 для воды, соединен с валом 4 для вращения барабана 1 в прямом и обратном направлении. Кроме того, на внутренней цилиндрической поверхности барабана 1 расположено несколько перемешивающих лопастей 6.
Отверстие 3а, расположенное на наклонной передней стороне бака 3 для воды, может быть открыто и закрыто дверцей 7. При открытой дверце 7 можно загружать белье в барана 1 и выгружать из него через люк 8 для загрузки и выгрузки белья. Так как дверца 7 установлена в наклонном положении, то пользователю при загрузке и выгрузке белья не нужно сильно сгибаться.
Бак 3 для воды поддерживается в корпусе 9 стиральной машины на пружине 10 и амортизаторе 11, так что он может качаться взад и вперед. С нижней частью бака 3 для воды соединен один конец сливного патрубка 12, другой конец которого соединен со сливным клапаном 13 для слива моечной воды из бака 3.
Датчик обнаружения смещения (устройство обнаружения смещения) 22 для обнаружения смещения бака 3 для воды установлен вблизи амортизатора 11 таким образом, что он может двигаться согласно вертикальному смещению бака 3 для воды. Нижняя рама 23 поддерживает корпус 9 стиральной машины и все элементы, находящиеся в нем.
Кроме того, имеется клапан 14 для подачи воды в бак 3 по подающей трубе 15 и уровнемер 16 для определения уровня воды в баке 3 для воды.
Более того, хотя в вышеописанном варианте осуществления изобретения барабан 1, имеющий вал 4 в своем центре вращения, установлен таким образом, что его центральная ось вращения наклонена к задней части стиральной машины, барабан 1 с валом 4 может быть установлен так, что его центральная ось вращения будет расположена горизонтально.
Как показано на фиг. 2, датчик обнаружения смещения 22 имеет первую детекторную катушку 22а, вторую детекторную катушку 22b и катушку возбуждения 22с (которая намотана внутри первой детекторной катушки 22а), которые соосны друг другу. По оси подвижно установлен стержень 22е, имеющий в себе сердечник 22d. Как показано на фиг. 1, верхний упор 22f соединен с баком 3 для воды, а нижний упор 22g - с нижней рамой 23.
Кроме того, хотя они и не показаны на фиг. 1, корпус 9 стиральной машины дополнительно содержит в себе вентилятор 17 для циркуляции теплого воздуха через барабан 1 и нагреватель 18 для получения теплого воздуха (см. фиг. 3), так что стиральная машина может, кроме того, иметь функцию сушки белья в барабане 1.
Как показано на фиг. 3, блок управления 19 содержит устройство управления 20 с микрокомпьютером для управления рядом последовательных операций, включая стирку, полоскание, отжим и сушку, а также для управления работой электродвигателя 5, клапана слива воды (DV) 13, клапана подачи воды (FV) 14, вентилятора (F) 17, нагревателя (Н) 18 и т.д.
В устройство управления 20 вводятся данные от программатора 21 для установления, например, определенной последовательности операций с предоставлением пользователю информации на дисплее 35. После того, как программатором 21 введена программа для начала работы, устройство управления 20 через приводное устройство 37 управляет работой клапана слива воды 13, клапана подачи воды 14, вентилятора 17 и нагревателя 18 на основе входных данных, посылаемых, например, от уровнемера 16 для определения уровня воды в баке 3 для воды, тем самым осуществляя операции стирки и сушки.
Одновременно устройство управления 20 регулирует скорость вращения электродвигателя 5, управляя преобразователем 26 через ведущую схему 25 на основе информации, посылаемой от датчиков обнаружения положения 24 (24а, 24b, 24c), которые обнаруживают положение ротора электродвигателя 5. Хотя это и не показано, электродвигатель 5 представляет собой бесщеточный электродвигатель постоянного тока, имеющий статор с трехфазными обмотками и ротор с двухполюсным постоянным магнитом, расположенным на кольце. Статор содержит трехфазные обмотки, состоящие из первой обмотки 5а, второй обмотки 5b и третьей обмотки 5с, намотанных вокруг железного сердечника с пазами.
Преобразователь 26 содержит переключающие устройства, каждое из которых имеет параллельную цепь из транзистора большой мощности (например, прибора на основе комбинации биполярного транзистора и полевого транзистора с изолированным затвором (ИЗБТ)) и обратнопроводящего диода. Каждое из переключающих устройств содержит последовательную цепь из первого и второго переключающих элементов 26а и 26b, последовательную цепь из третьего и четвертого переключающих элементов 26с и 26d и последовательную цепь из пятого и шестого переключающих элементов 26е и 26f, при этом последовательные цепи соединены друг с другом параллельно.
Оба конца каждой из последовательных цепей служат в качестве терминалов ввода и соединены с источником электропитания постоянного тока. Кроме того, точки соединения двух переключающих элементов в каждой последовательной цепи являются соответственно терминалами вывода, которые, в свою очередь, соединены соответственно с терминалом U, терминалом V и терминалом W трехфазных обмоток. Сочетая надлежащим образом операции включения и выключения двух переключающих элементов в каждой последовательной цепи, управляют терминалами U, V и W для установки на соответственно положительное напряжение, нулевое напряжение и плавающее состояние.
Операции включения и выключения переключающих устройств контролируются устройством управления 20 на основе информации от трех датчиков обнаружения положения 24а-24с с применением интегральных схем. Датчики обнаружения положения 24а-24с размещены у статора с интервалами электрического угла в 120 градусов и обращены к постоянному магниту, имеющемуся в роторе.
В то время как ротор делает один оборот, каждый из трех датчиков обнаружения положения 24а-24с выдает импульс с интервалами электрического угла в 120 градусов. Устройство управления 20 проверяет, изменил ли, по меньшей мере, один из трех датчиков обнаружения положения 24а-24с свое состояние, и когда обнаружено изменение состояния, устройство управления 20 изменяет состояние включено-выключено переключающих элементов 26а-26f на основе сигналов от датчиков обнаружения положения 24а-24с, тем самым обеспечивая нахождение терминалов U, V и W при соответственно положительном напряжении, нулевом напряжении и плавающем состоянии. Магнитное поле образуется благодаря подаче контролируемой таким образом электроэнергии к первой, второй и третьей обмоткам 5а-5c статора, что приводит к вращению ротора.
Кроме того, каждый из переключающих элементов 26а, 26с и 26е подвергается широтно-импульсной модуляции (ШИМ), и число оборотов ротора регулируется, например, изменением коэффициента заполнения при частоте в 10 кГц. Всякий раз, когда состояние сигнала изменяется в, по меньшей мере, одном из датчиков обнаружения положения 24а-24с, устройство управления 20 определяет его период, вычисляет число оборотов ротора на основе определенного периода и затем осуществляет ШИМ-регулирование переключающих элементов 26а, 26с и 26е таким образом, чтобы число оборотов ротора соответствовало заданному значению.
Детектор тока 27, который включает в себя резистор 28, соединенный с входным терминалом преобразователя 26, и цепь обнаружения тока 29, соединенную с резистором 28, обнаруживает входной ток преобразователя 26 и подает его выходное напряжение в устройство управления 20. В том случае, когда электродвигателем 5 является бесщеточный электродвигатель постоянного тока, его крутящий момент по существу пропорционален его входному току. Таким образом, крутящий момент электродвигателя 5 может быть получен посредством обнаружения входного тока преобразователя 26 благодаря использованию цепи обнаружения тока 29, соединенной с резистором 28.
Определитель количества белья 30 определяет количество белья в барабане 1 на основе сигнала, передаваемого от детектора тока 27, когда барабан 1 вращается с определенной скоростью вращения (например, 200 об/мин).
Источник электроснабжения от энергосистемы общего пользования 31 соединен с преобразователем 26 через инвертор постоянного тока, содержащий, например, диодный мост 32, дроссельную катушку 33 и сглаживающий конденсатор 34. Необходимо отметить, что вышеописанная структура является лишь одним примером, и структуры с бесщеточным электродвигателем постоянного тока 5, преобразователем 26 и т.п. не следует истолковывать как ограничительные.
Программатор 21 (не показан) содержит устройство для установки времени стирки, устройство для установки количества полосканий, устройство для установки времени отжима, устройство для установки времени сушки, устройство для пуска и паузы, включатель, выключатель и устройство установки цикла.
Дисплей 35 (не показан) содержит индикатор времени стирки, индикатор количества полосканий, индикатор времени сушки и индикатор установки цикла. Дисплей 35, кроме того, содержащий цифровой индикатор, может показывать количество моющего средства и оставшееся время.
Устройство обнаружения смещения 36, показанное на фиг. 3, содержит колебательный контур 38, соединенный с катушкой возбуждения 22с в датчике обнаружения смещения 22, и детекторный контур 39, соединенный с первой детекторной катушкой 22а и второй детекторной катушкой 22b, как это особенно показано на фиг. 4. Выходной сигнал от детекторного контура 39 подается к микрокомпьютеру 40, входящему в состав устройства управления 20.
Кроме того, конец катушки возбуждения 22с соединен с концом первой детекторной катушки 22а, а также с концом второй детекторной катушки 22b, образуя нейтральную точку, имеющую опорное напряжение 0V сообща с микрокомпьютером 40, что тем самым предотвращает несоответствие напряжения между ними.
Далее будет дано объяснение того, как будет работать стиральная машина с этой структурой.
Если белье, загруженное во вращающийся барабан 1, при его отжиме после стирки находится в неравномерно распределенном состоянии, то барабан 1 вращается так, что вал 4 не остается в одном и том же положении, а движется вверх и вниз, влево и вправо и назад и вперед. В этом случае бак 3 для воды движется таким же самым образом, как и вращающийся барабан 1, так что движение (главным образом, вертикальное движение) обнаруживается датчиком обнаружения 22, и сигнал о смещении бака 3 для воды посылается в микрокомпьютер 40 устройства управления 20 через устройство обнаружения смещения 36.
Учитывая то, что сигнал о смещении бака 3 для воды указывает на неравномерное распределение белья 1 во вращающемся барабане 1, вибрацию и шум при работе стиральной машины можно уменьшить во время процесса сушки посредством использования устройства управления 20, которое через ведущую цепь 25 и преобразователь 26 выдает сигнал управления к электродвигателю 5, чтобы остановить процесс отжима или изменить число оборотов в случае, если неравномерное распределение белья оценивается как превышающее заранее установленный порог.
Второй предпочтительный вариант
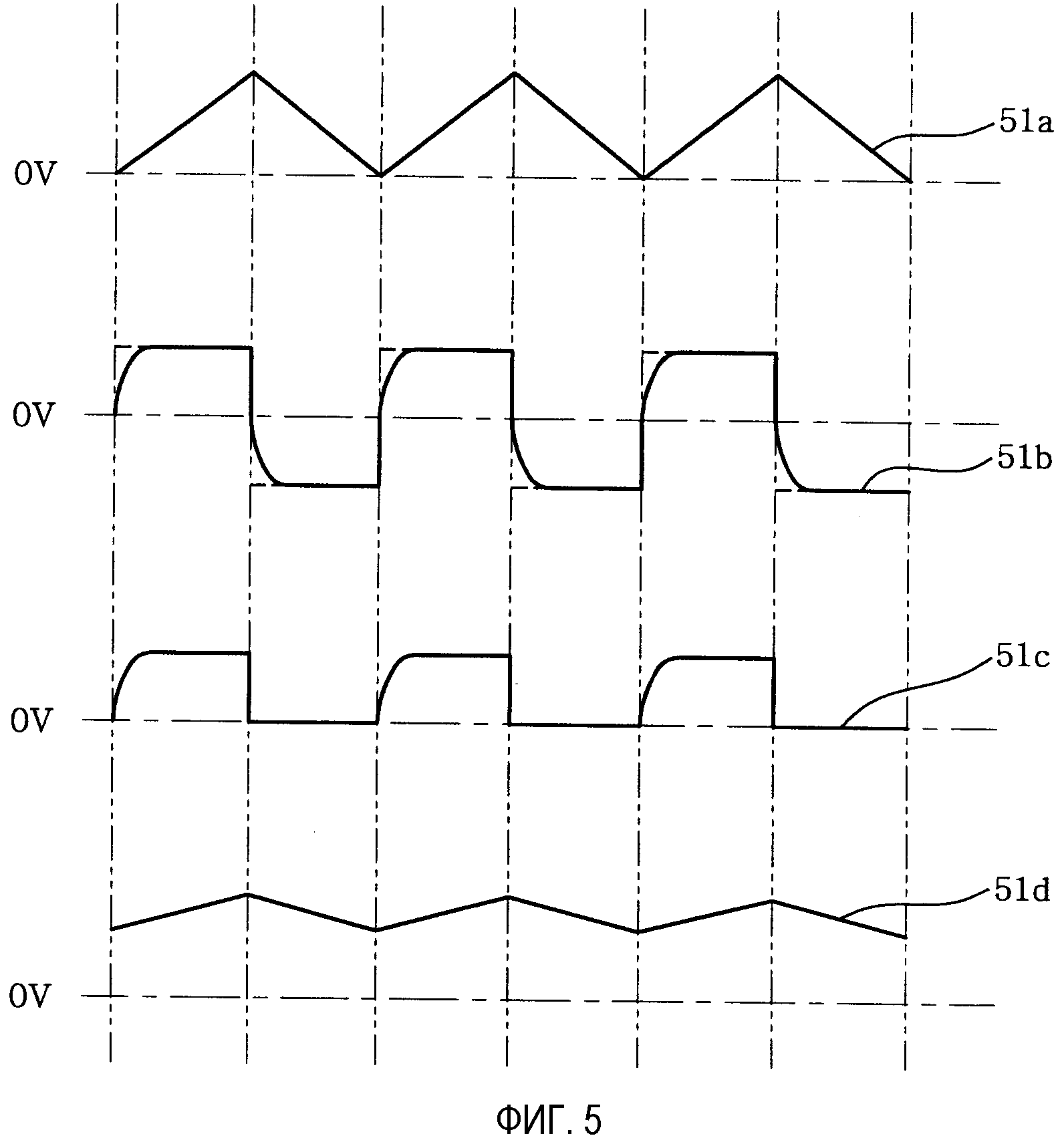
На фиг. 5 представлен график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно второму варианту осуществления настоящего изобретения. В дальнейшем его элементы, которые аналогичны элементам в первом варианте, будут обозначены такими же самыми позициями, что и в первом варианте, при этом они остаются без объяснения.
На фиг. 5 форма волны 51а относится к сигналу, подводимому к катушке возбуждения 22с, форма волны 51b - к выходному сигналу от первой детекторной катушки 22а и второй детекторной катушки 22b, форма волны 51с - к полуволновому выпрямленному сигналу, который обрабатывается в детекторном контуре 39, и форма волны 51d - к сглаженному сигналу, выходящему от детекторного контура 39. За исключением этого, второй вариант имеет такую же самую структуру, как и у первого варианта.
В дальнейшем будет описан принцип действия устройства обнаружения смещения 36 с этой структурой.
Сначала к катушке возбуждения 22с подводится треугольная форма волны, примером которой служит форма волны 51а, показанная на фиг. 5. Треугольная форма волны может быть создана колебательным контуром 38 со сравнительно простой структурой контура, имеющего, например, два операционных усилителя (не показаны). При подведении треугольной формы волны к катушке возбуждения 22с происходит процесс дифференцирования в отношении подведенной формы волны в первой детекторной катушке 22а, так что создается форма волны, сходная с формой волны в виде частично сглаженного меандра, примером которой служит форма волны 51b. Форма волны, по существу одинаковая с формой волны 51b, создается во второй детекторной катушке 22b.
После этого образованная форма волны подвергается полуволновому выпрямлению и затем сглаживается детекторным контуром 39 так, как это иллюстрируется формами волны 51с и 51d. Форма волны, полученная при этом процессе, поступает, например, в аналого-цифровой преобразователь в микрокомпьютере 40, тем самым передавая информацию о смещении, обнаруженном датчиком обнаружения смещения 22, к устройству управления 20.
Как описывалось выше, согласно второму варианту осуществления настоящего изобретения можно, используя треугольную форму волны, получить при простой структуре цепи стабильные выходные характеристики.
Третий предпочтительный вариант
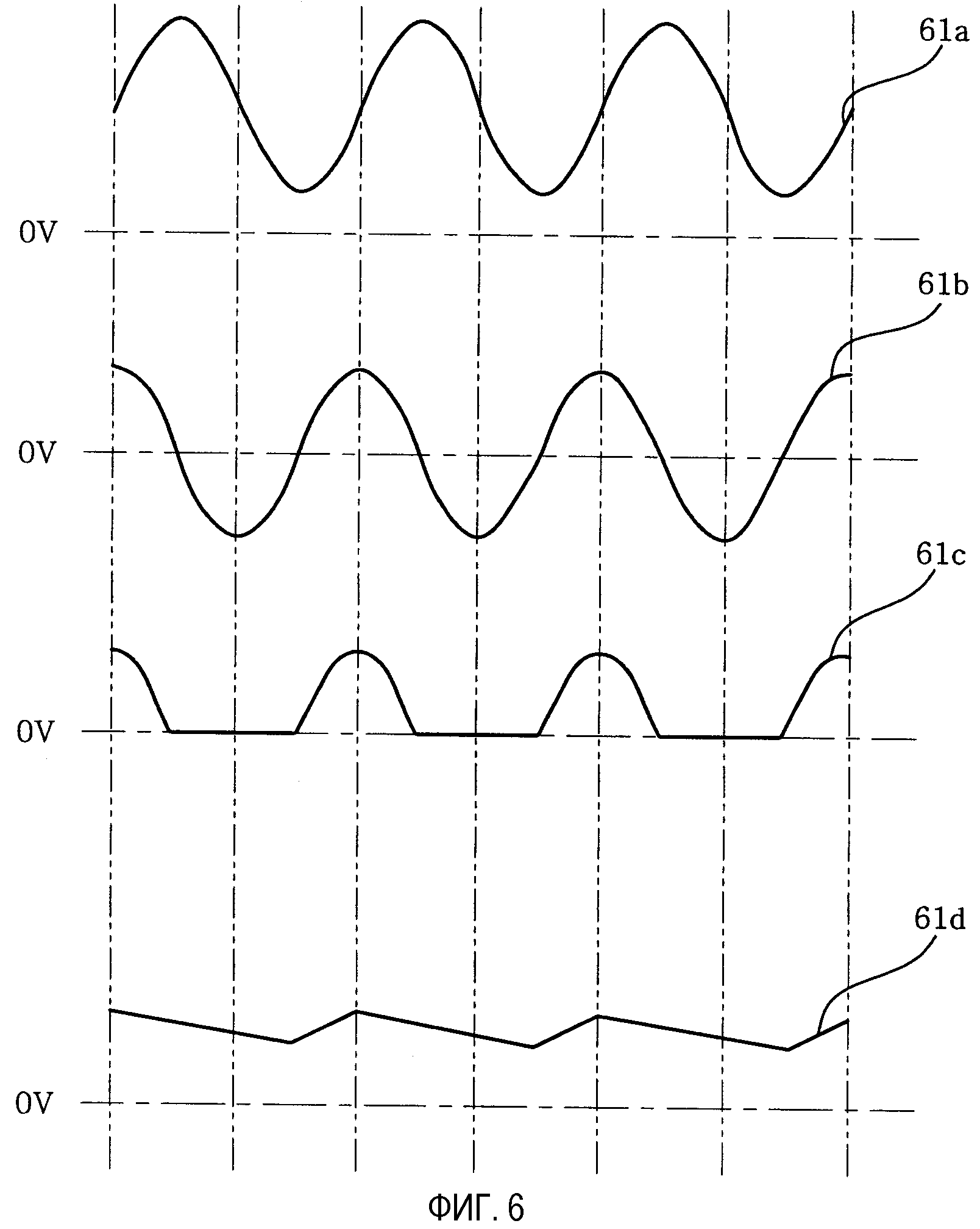
На фиг. 6 представлен график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно третьему варианту осуществления настоящего изобретения. В дальнейшем его элементы, которые аналогичны элементам в первом варианте, будут обозначены такими же самыми позициями, что и в первом варианте, при этом они останутся без объяснения.
На фиг. 6 форма волны 61а относится к сигналу, подводимому к катушке возбуждения 22с, форма волны 61b - к выходному сигналу от первой детекторной катушки 22а и второй детекторной катушки 22b, форма волны 61с - к полуволновому выпрямленному сигналу, который обрабатывается в детекторном контуре 39, и форма волны 61d - к сглаженному сигналу, выходящему от детекторного контура 39. За исключением этого, третий вариант имеет такую же самую структуру, как и у первого варианта.
В дальнейшем будет описан принцип действия устройства обнаружения смещения 36 с этой структурой.
Сначала к катушке возбуждения 22с подводится синусоидальная форма волны, примером которой служит форма волны 61а, показанная на фиг. 6. Синусоидальная форма волны может быть создана колебательным контуром 38 со сравнительно простой структурой контура (не показана). При подведении синусоидальной формы волны к катушке возбуждения 22с происходит процесс дифференцирования в отношении подведенной формы волны в первой детекторной катушке 22а, так что создается форма волны, которая является одинаковой с формой волны 61b, за исключением сдвига ее фазы. Форма волны, по существу одинаковая с ней, создается во второй детекторной катушке 22b.
После этого образованная форма волны подвергается полуволновому выпрямлению и затем сглаживается детекторным контуром 39 так, как это иллюстрируется формами волны 61с и 61d. Форма волны, полученная при этом процессе, поступает, например, в аналого-цифровой преобразователь в микрокомпьютере 40, тем самым передавая информацию о смещении, обнаруженном датчиком обнаружения смещения 22, к устройству управления 20.
Как описывалось выше, согласно третьему варианту осуществления настоящего изобретения можно, подводя синусоидальную форму волны к катушке возбуждения 22, получить нечувствительные к температуре и стабильные выходные характеристики, поскольку синусоидальная форма волны не изменяется даже после прохождения через датчик обнаружения смещения 22.
Четвертый предпочтительный вариант
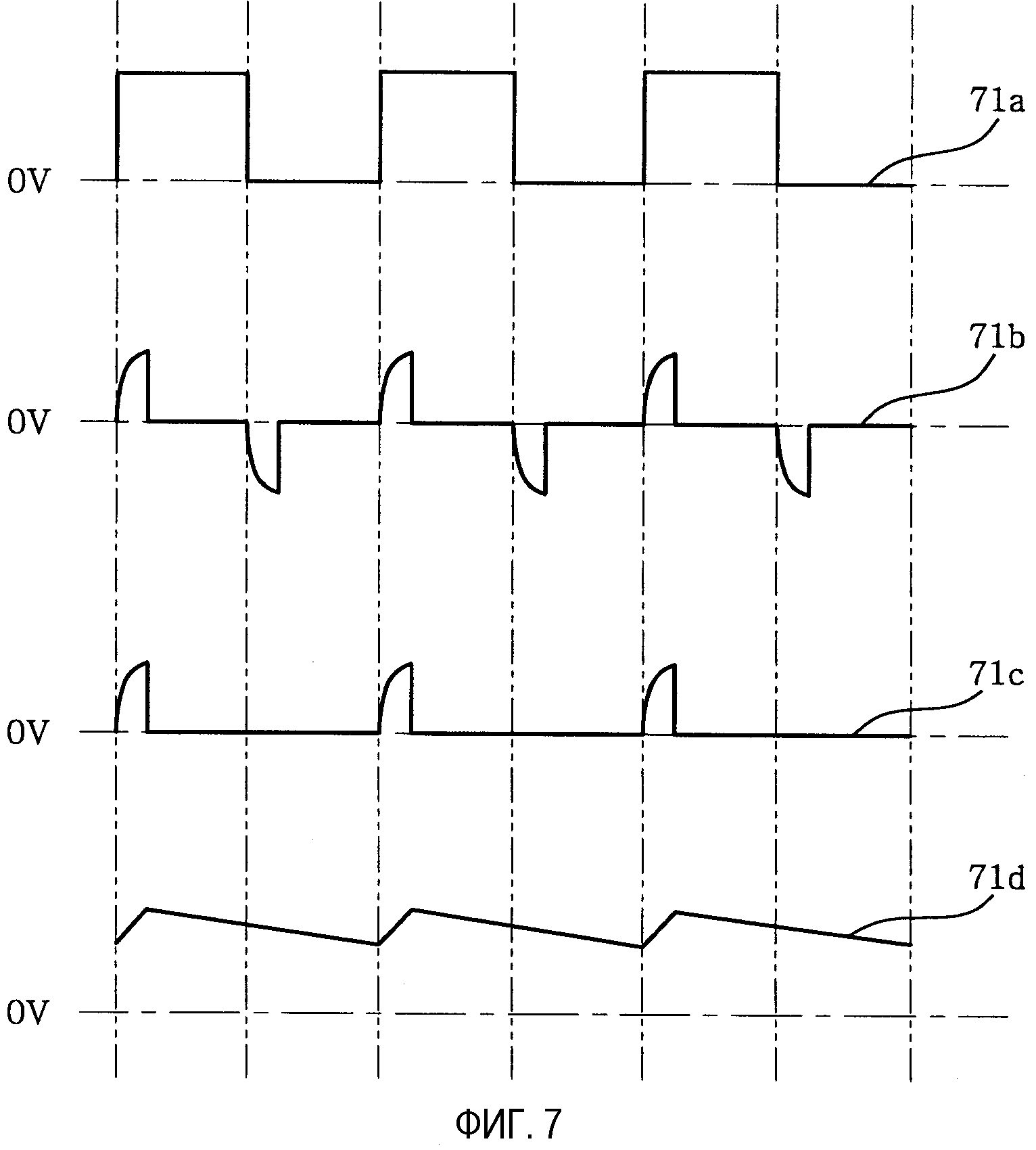
На фиг. 7 представлен график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно четвертому варианту осуществления настоящего изобретения. В дальнейшем его элементы, которые аналогичны элементам в первом варианте, будут обозначены такими же самыми позициями, что и в первом варианте, при этом они останутся без объяснения.
На фиг. 7 форма волны 71а относится к сигналу, подводимому к катушке возбуждения 22с, форма волны 71b - к выходному сигналу от первой детекторной катушки 22а и второй детекторной катушки 22b, форма волны 71с - к полуволновому выпрямленному сигналу, который обрабатывается в детекторном контуре 39, и форма волны 71d - к сглаженному сигналу, выходящему от детекторного контура 39. За исключением этого, четвертый вариант имеет такую же самую структуру, как и у первого варианта.
В дальнейшем будет описан принцип действия устройства обнаружения смещения 36 с этой структурой.
Сначала к катушке возбуждения 22с подводится форма волны в виде меандра, примером которой служит форма волны 71а, показанная на фиг. 7. При подведении формы волны в виде меандра к катушке возбуждения 22с происходит процесс дифференцирования в отношении подведенной формы волны в первой детекторной катушке 22а, так что создается форма волны с узкими высокими пиками, примером которой служит форма волны 71b. Пик формы волны 71b может быть установлен регулированием постоянной времени колебательного контура 38 или обмоточного коэффициента каждой катушки в датчике обнаружения смещения 22. При использовании вышеописанного способа может быть легко получено высокое напряжение. Форма волны, по существу одинаковая с ней, создается во второй детекторной катушке 22b.
После этого образованная форма волны подвергается полуволновому выпрямлению и затем сглаживается детекторным контуром 39 так, как это иллюстрируется формами волн 71с и 71d. Форма волны, полученная при этом процессе, поступает, например, в аналого-цифровой преобразователь в микрокомпьютере 40, тем самым передавая информацию о смещении, обнаруженном датчиком обнаружения смещения 22, к устройству управления 20.
Как описывалось выше, согласно четвертому варианту осуществления настоящего изобретения можно, подводя форму волны в виде меандра к катушке возбуждения 22с, получить высокий выходной уровень при простой структуре цепи и усилить чувствительность устройства обнаружения смещения 36.
Пятый предпочтительный вариант
На фиг. 8 представлен график форм волн, показывающий формы волн в каждой части устройства обнаружения смещения во время работы стиральной машины согласно пятому варианту осуществления настоящего изобретения, а на фиг. 9 показана подробная блок-схема устройства обнаружения смещения. В дальнейшем его элементы, которые аналогичны элементам в первом варианте, будут обозначены такими же самыми позициями, что и в первом варианте, при этом они останутся без объяснения.
На фиг. 8 форма волны 80 относится к синхронизирующему сигналу, посылаемому от микрокомпьютера 40 к колебательному контуру 38, показанному на фиг. 9, форма волны 81а - к сигналу, подводимому к катушке возбуждения 22с, форма волны 81b - к выходному сигналу от первой детекторной катушки 22а и второй детекторной катушки 22b, форма волны 81с - к полуволновому выпрямленному сигналу, который обрабатывается в детекторном контуре 39, и форма волны 81d - к сглаженному сигналу, выходящему от детекторного контура 39. За исключением этого, пятый вариант имеет такую самую структуру, как и у первого варианта.
В дальнейшем будет описан принцип действия устройства обнаружения смещения 36 с этой структурой.
Сначала к катушке возбуждения 22с подводится треугольная форма волны, примером которой служит форма волны 81а, показанная на фиг. 8. Треугольная форма волны может быть создана колебательным контуром 38 со сравнительно простой структурой контура, имеющего, например, два операционных усилителя (не показаны). При подведении треугольной формы волны к катушке возбуждения 22с происходит процесс дифференцирования в отношении подведенной формы волны в первой детекторной катушке 22а, так что создается форма волны, сходная с формой волны в виде частично сглаженного меандра, примером которой служит форма волны 81b. Форма волны, по существу одинаковая с формой волны 81b, создается во второй детекторной катушке 22b.
После этого образованная форма волны подвергается полуволновому выпрямлению и затем сглаживается детекторным контуром 39 так, как это иллюстрируется формами волн 81с и 81d. Форма волны, полученная при этом процессе, поступает, например, в аналого-цифровой преобразователь в микрокомпьютере 40, тем самым передавая информацию о смещении, обнаруженном датчиком обнаружения смещения 22, к устройству управления 20.
Если в данном случае период формы волны 81а, выходящей от колебательного контура 38, и период операций считывания в микрокомпьютере 40 не синхронизированы друг с другом, то микрокомпьютер 40 считывает форму волны 81d таким образом, что фаза формы волны 81d в данное время считывания отличается от фазы в предшествующее время считывания. Например, как показано на фиг. 8, операции считывания формы волны 81d осуществляются в первое время считывания 82а, во второе время считывания 82b и третье время считывания 82с. В результате может иметь место несовместимость или непостоянство среди множества считываемых данных.
Для того чтобы решить эту проблему, синхронизирующий сигнал, как например, с формой волны 80, показанной на фиг. 8, посылают от микрокомпьютера 40 к колебательному контуру 38, так чтобы форму волны, подлежащую считыванию, т.е. форму волны 81d в примере на фиг. 8, можно было сделать синхронной с операциями считывания. Например, как показано на фиг. 8, операции считывания формы волны 81d осуществляют в первое время считывания 83а, второе время 83b и третье время считывания 83с.
Как объяснялось выше, сигналы от катушки возбуждения 22с и двух детекторных катушек 22а и 22b могут быть сделаны синхронными с внутренним сигналом микрокомпьютера 40 в устройстве управления 20, тем самым делая возможным синхронное осуществление операций считывания сигнала, полученного выпрямлением и сглаживанием выходного напряжения детекторных катушек 22а и 22b.
Таким образом, может быть усилена совместимость и постоянство принимаемых данных для достижения высокоточного обнаружения вибрации.
Хотя настоящее изобретение описано в отношении вариантов его осуществления, в которых датчик обнаружения смещения 22 установлен в вертикальном направлении, настоящее изобретение не следует истолковывать как ограниченное ими. Например, датчик обнаружения смещения 22 может быть установлен в горизонтальном направлении или в наклонном направлении так, чтобы он мог обнаруживать горизонтально двухмерное смещение.
Кроме того, хотя настоящее изобретение описано в отношении вариантов его осуществления, в которых катушки датчика обнаружения смещения 22 намотаны с перекрытием друг друга, настоящее изобретение не следует истолковывать как ограниченное ими. Кроме того, катушки датчика обнаружения смещения 22 можно наматывать таким образом, чтобы они имели общую ось.
Как можно было видеть выше, стиральная машина согласно настоящему изобретению может применяться в качестве малошумной стиральной машины для бытового или промышленного использования, потому что можно ограничивать ее вибрацию и шум посредством эффективного обнаружения неравномерности распределения белья для регулирования скорости вращения электродвигателя, особенно в стиральной машине барабанного типа.
Хотя изобретение показано и описано в отношении предпочтительных вариантов его осуществления, специалистам в данной области будет понятно, что могут быть сделаны различные изменения и модификации, не выходящие за пределы изобретения и не отклоняющие от его сущности, определенные в нижеследующей формуле изобретения.
Реферат
Стиральная машина содержит вращающийся барабан для размещения в нем белья, при этом вращающийся барабан имеет горизонтальную или наклонную ось вращения. Бак для воды с возможностью вибрации поддерживается в корпусе стиральной машины, а вращающийся барабан с возможностью вращения установлен в баке для воды. Стиральная машина содержит также электродвигатель для привода во вращение вращающегося барабана, программатор для программирования работы стиральной машины, устройство управления для управления электродвигателем и работой стиральной машины, запрограммированной программатором. Устройство управления содержит микрокомпьютер и устройство обнаружения смещения для обнаружения смещения бака для воды. Устройство обнаружения смещения содержит катушку возбуждения, по меньшей мере, две детекторные катушки, соосные с катушкой возбуждения, и сердечник, который может перемещаться вдоль оси. Конец катушки возбуждения соединен с концом каждой из детекторных катушек, образуя нейтральную точку, соединенную с опорным напряжением 0V источника питания микрокомпьютера. Другой конец катушки возбуждения соединен с колебательным контуром, а второй конец каждой из детекторных катушек соединен с микрокомпьютером через детекторный контур. 4 з.п. ф-лы, 9 ил.

Комментарии