Многокомпонентный акселерометр с одной массой - RU2733974C2
Код документа: RU2733974C2
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По этой заявке испрашивается приоритет предварительной заявки №62/249095 на патент США, поданной 30 октября 2015 года, под названием ʺOcean bottom systemʺ, которая полностью и для всех целей включена в эту заявку путем ссылки. Эта заявка связана с одновременно рассматриваемой заявкой №_/__ на патент США изобретателей Peter Graham Stewart и Kees Faber с той же датой подачи, под названием ʺOcean bottom seismic systemsʺ, реестр №P256885.US.02, которая полностью и для всех целей включена в эту заявку путем ссылки.
УРОВЕНЬ ТЕХНИКИ
В общем, эта заявка относится к геофизической разведке, а более конкретно, к регистрации сейсмических данных и технологиям датчиков. В частности, заявка относится к сенсорным системам для морских сейсмических исследований, в том числе, но без ограничениями ими, к применениям океанических донных кабелей и автономных сейсмических узлов.
Технологии сейсмических исследований обычно используют при разведке и разработке запасов полезных ископаемых для нефтехимической отрасли промышленности. Нефтехимические продукты широко распространены в современной экономике и могут быть обнаружены везде, от масла и бензина до медицинских приборов, детских игрушек и широкого ассортимента повседневных предметов домашнего обихода. Для удовлетворения непрерывно возрастающей потребности в этих продуктах необходимо осуществлять точное обнаружение и исследование запасов нефти и газа, чтобы можно было эффективно управлять этими важными запасами. Вследствие этого все время имеется необходимость в новых сейсмических сенсорных системах и более усовершенствованных технологиях разведки.
Ученые и инженеры обычно используют основанные на сейсмических волнах способы разведки для обнаружения новых запасов нефти и газа и для исследования и управления существующими запасами в динамике во времени. Сейсмические исследования выполняют путем развертывания группы сейсмических датчиков или приемников в пределах представляющей интерес области и мониторинга отклика на управляемое излучение сейсмической энергии сейсмическими источниками, такими как вибраторы и группы воздушных пушек, или с помощью взрывных детонаций. Отклик зависит от сейсмической энергии, отраженной от подземных структур, и это позволяет осуществлять построение изображений соответствующих геологических объектов, в том числе минеральных пластов, и других представляющих интерес подземных структур.
Морские сейсмические исследования можно выполнять при буксировании группы сейсмических датчиков или приемников позади исследовательского судна, при этом приемники распределяют по одной или нескольким буксируемым косам. Набор воздушных пушек или других сейсмических источников используют для генерации сейсмической энергии, которая распространяется вниз через водяную толщу к ложу океана (или другой нижней поверхности). Часть сейсмической энергии проходит сквозь ложе океана и отражается от подземных структур, затем возвращается обратно через водяную толщу, чтобы быть обнаруженной на группе сейсмических кос. Кроме того, сейсмические приемники могут быть расположены по длине океанических донных кабелей или образованы в виде отдельных автономных сейсмических узлов, распределенных по морскому дну.
Типичные сейсмические приемники включают в себя датчики давления и детекторы движения частиц, которые могут быть образованы как отдельные компоненты датчиков или как объединенные с датчиками обоих видов, расположенные в непосредственной близости друг к другу в приемном модуле или сейсмическом узле. Например, набор датчиков давления может быть расположен в группе гидрофонов и адаптирован для регистрации измерений скалярного давления сейсмического волнового поля, распространяющегося через водяную толщу или другую сейсмическую среду. Датчики движения частиц включают в себя акселерометры и геофоны, которые могут быть выполнены с возможностью получения однокомпонентных или трехмерных измерений, результаты которых характеризуют перемещение среды в ответ на распространяющиеся сейсмические волны.
Геофизические данные, относящиеся к подземным структурам, регистрируют при наблюдении отраженной сейсмической энергии с помощью группы таких приемных компонентов. Зарегистрированные сейсмические сигналы используют для построения сейсмического изображения, которое описывает геологическое строение среды и состав породы в области разведки и вокруг нее. Общее качество изображения зависит не только от чувствительности к сигналу, но также и от воздействия помех, и это способствует поддержанию постоянной потребности в более усовершенствованных технических решениях, относящихся к датчикам и приемникам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Эта заявка относится к многокомпонентному датчику движения частиц с одной массой или акселерометру, пригодному для использования при сейсмических исследованиях. Например, множество компонентов датчика могут быть соединены с одной центральной массой, и этим обеспечивается чувствительность к линейному перемещению по трем независимым направлениям и чувствительность к ускорению вращения вокруг трех ортогональных осей. Отдельные компоненты датчика могут быть выполнены с возможностью восприятия соответствующих линейных и вращательных перемещений на основании динамической связи с массой, включая, но без ограничения ими, чувствительные к силе линейные связи и поворотные связи. Линейные и поворотные связи могут быть чувствительными преимущественно либо к акустическим волнам, либо к эффектам сдвига, вследствие чего, как описано в этой заявке, образуется объединенный сигнал датчика с повышенной точностью вектора.
Согласно некоторым вариантам осуществления сейсмический датчик содержит корпус или раму и размещенную центральную массу. Центральная масса расположена внутри рамы и может иметь три главные оси. Множество преобразователей могут быть механически присоединены между рамой и центральной массой и размещены парами, соединенными с противоположными сторонами центральной массы вдоль каждой из трех главных осей.
В зависимости от применения пьезоэлектрические преобразователи с кристаллами, выровненными для обеспечения чувствительности сигнала к напряжению сдвига, могут использоваться в качестве чувствительного элемента. Для образования выходного сигнала, характеризующего ускорение и поворот рамы, может быть предусмотрена электроника для объединения сигналов с преобразователей в каждой паре.
Это изложение сущности изобретения представлено для ознакомления с выбором концепций в упрощенной форме, которые дополнительно рассмотрены ниже в подробном описании. Это изложение сущности изобретения не предназначено ни для идентификации ключевых особенностей или существенных особенностей заявленного объекта изобретения, ни для использования с целью ограничения объема заявленного объекта изобретения. Более развернутое представление признаков, деталей, полезности и преимуществ настоящего изобретения, определенного в формуле изобретения, дано в нижеследующем описании, включающем различные типичные варианты осуществления изобретения, показанные на сопровождающих чертежах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
фиг. 1А - изометрический вид тестовой массы, пригодной для использования в многокомпонентном акселерометре;
фиг. 1В - изометрический вид в разрезе многокомпонентного сейсмического датчика с одной массой, в котором использована центральная тестовая масса;
фиг. 1С - структурная схема, иллюстрирующая типичную модульную сейсмическую сенсорную станцию или узел, выполненный с возможностью использования многокомпонентного сейсмического датчика с одной массой;
фиг. 1D - схематичное представление типичной сейсморазведки с использованием множества модульных сейсмических сенсорных станций или узлов;
фиг. 2 - схематичный вид приведенного для примера многокомпонентного сейсмического датчика в конфигурации с одной массой;
фиг. 3 - график шума в зависимости от частоты для типичной конструкции датчика;
фиг. 4 - изометрический вид типичного многокомпонентного сейсмического датчика с одной массой;
фиг. 5 - график напряжения сдвига в зависимости от частоты для сейсмического датчика типичной конструкции;
фиг. 6 - изометрический вид многокомпонентного сейсмического датчика с одной массой иной конструкции;
фиг. 7 - график напряжения сдвига для сейсмического датчика иной конструкции;
фиг. 8 - изометрический вид многокомпонентного сейсмического датчика с одной массой еще одной иной конструкции;
фиг. 9А - изометрический вид выравнивающего инструментального средства или сборочного приспособления для сборки из компонентов многокомпонентного сейсмического датчика с одной массой;
фиг. 9В - изометрический вид выравнивающего инструментального средства или сборочного приспособления для сборки многокомпонентного сейсмического датчика с одной массой;
фиг. 10 - схематичное представление, иллюстрирующее внешние стимулы, прикладывающие силы к датчику;
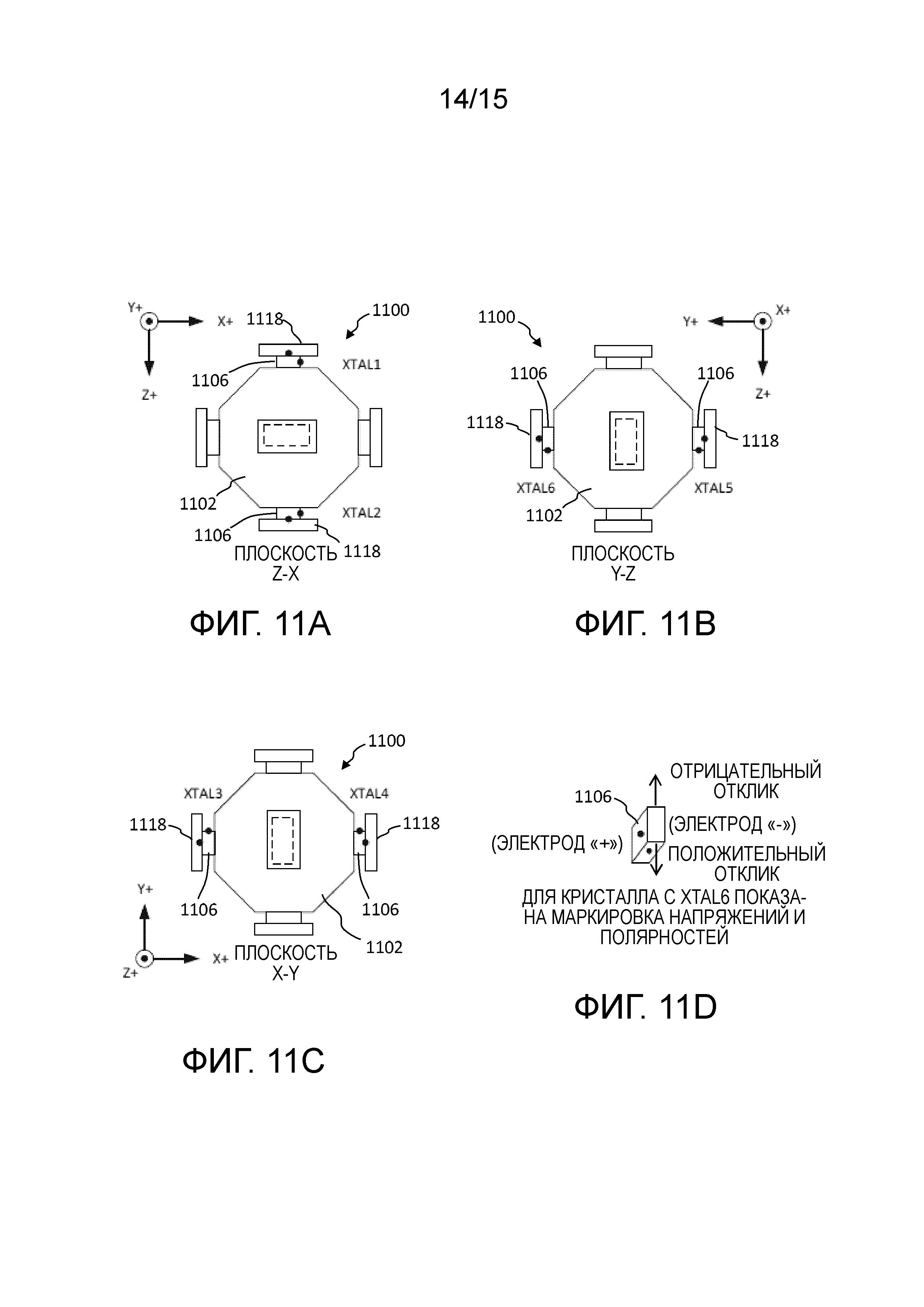
фиг. 11А - схематичное представление, иллюстрирующее ориентацию и отклик на перемещение набора преобразователей, расположенных вокруг тестовой массы в плоскости X-Z;
фиг. 11В - схематичное представление, иллюстрирующее ориентацию и отклик на перемещение набора преобразователей, расположенных вокруг тестовой массы в плоскости X-Y;
фиг. 11С - схематичное представление, иллюстрирующее ориентацию и отклик на перемещение набора преобразователей, расположенных вокруг тестовой массы в плоскости Y-Z;
фиг. 11D - схематичное представление, иллюстрирующее отклик и правило полярностей электродов для типичного преобразователя; и
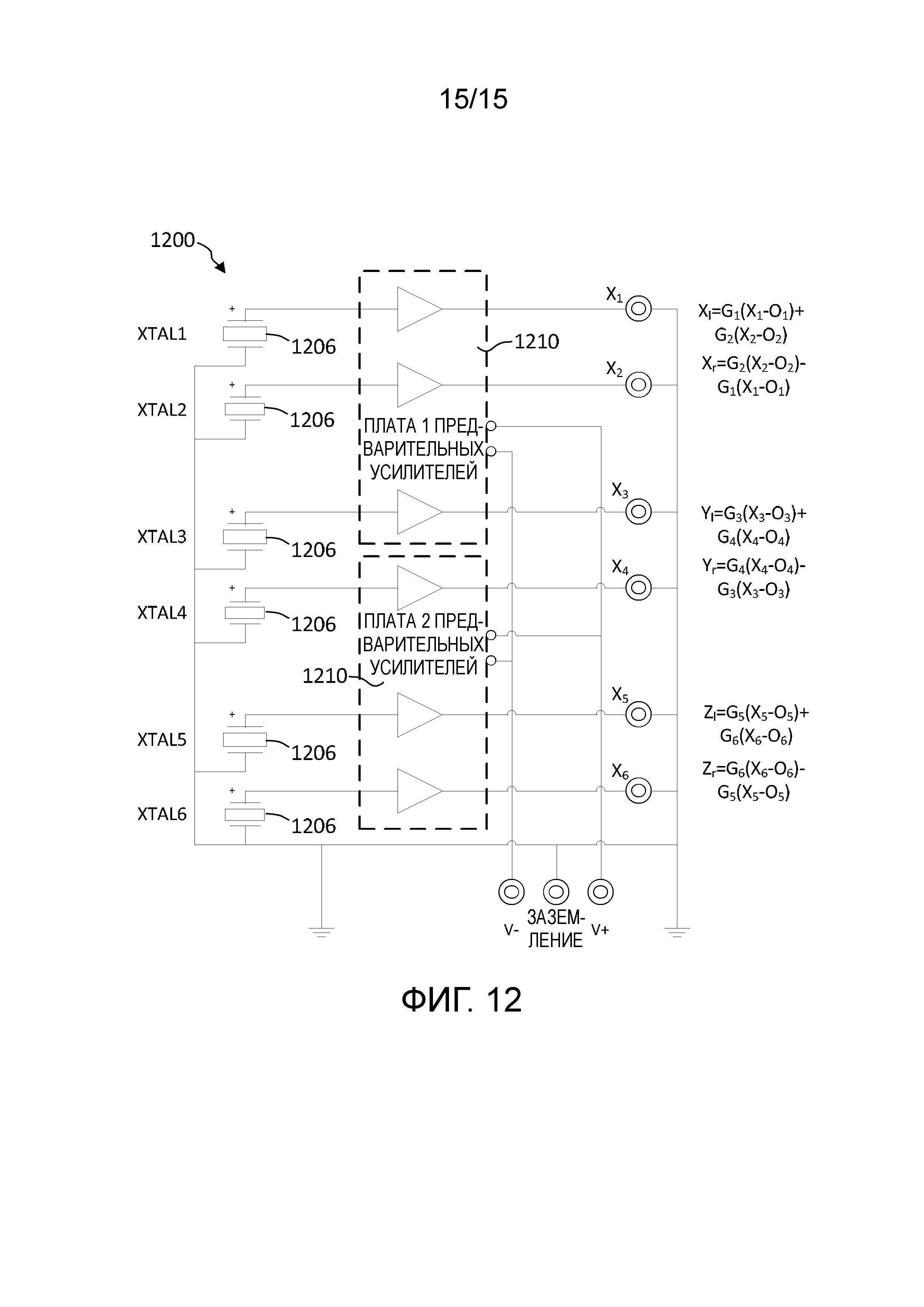
фиг. 12 - типичная схема соединений набора преобразователей в многокомпонентном сейсмическом датчике с одной массой.
ПОДРОБНОЕ ОПИСАНИЕ
В этом раскрытии делается обращение к примерам и вариантам осуществления изобретения. Однако следует понимать, что изобретение не ограничено этими или любыми другими конкретно описываемыми вариантами осуществления. Любое сочетание раскрытых признаков и элементов независимо от того, относятся они или нет к различным вариантам осуществления, предполагается относящимся к реализации и применению на практике изобретения. Кроме того, различные примеры и варианты осуществления изобретения имеют многочисленные преимущества по сравнению с предшествующим уровнем техники. Хотя в некоторых вариантах осуществления могут достигаться эти и другие преимущества по сравнению с различными возможными решениями и по сравнению с предшествующим уровнем техники, заявленное изобретение не ограничивается определенным вариантом осуществления независимо от того, достигается или нет в нем конкретное преимущество. Поэтому приведенные ниже аспекты, признаки, варианты осуществления и преимущества раскрытия являются только иллюстративными и не должны считаться элементами или ограничениями формулы изобретения за исключением случаев, когда это ясно определено на языке формулы изобретения. Точно так же упоминание изобретения не должно толковаться как обобщение любого объекта изобретения, раскрытого в этой заявке, и не должно считаться представляющим элемент или ограничением любого притязания за исключением случаев, когда это явно изложено в этой заявке.
Некоторые варианты осуществления изобретения могут быть реализованы как программный продукт или выполняемый способ для использования вместе с компьютеризированной системой. Соответствующие программы могут определять функции различных вариантов осуществления и способов, описанных в этой заявке, и могут иметься на ряде машиночитаемых носителей. Иллюстративные машиночитаемые носители включают в себя, но без ограничения: (i) информацию, постоянно сохраняемую на не предназначенных для перезаписи носителях данных (например, в запоминающем устройстве, доступном компьютеру только для чтения, таком как постоянные запоминающие устройства или компакт-диски, доступные только для чтения); (ii) изменяемую информацию, сохраняемую на перезаписываемых носителях данных (например, в устройствах с произвольным доступом или оперативных запоминающих устройствах, флэш-памяти и других твердотельных устройствах и на магнитных дисках или жестких дисках; и (iii) информацию, передаваемую в компьютер с помощью среды передачи данных, например, по беспроводной сети, включающую приложения, программный код и другую информацию, загружаемую из интернета или другой сети. Соответствующие нетранзиторные машиночитаемые носители включают в себя машиночитаемые инструкции, которые выполняются процессором компьютера для осуществления различных функций и этапов способов настоящего изобретения, раскрытых в этой заявке, и также представляют соответствующие варианты осуществления настоящего изобретения.
В общем случае стандартные программы, выполняемые для реализации способов и вариантов осуществления изобретения, могут быть частью операционной системы или могут быть представлены как конкретное приложение, компонент, программа, модуль, объект или последовательность инструкций. Компьютерные программные приложения согласно настоящему изобретению обычно содержат большое количество инструкций, которые могут преобразовываться компьютером в машиночитаемый формат, например в форму выполняемой программы. Кроме того, соответствующие программы могут содержать параметры, переменные и структуры данных, которые либо находятся в определенном месте вместе с соответствующими данными программы, либо находятся в других запоминающих устройствах и устройствах хранения данных. Кроме того, различные программы и выполняемые компьютером способы, описанные в этой заявке, могут быть идентифицированы на основании применения, для которого они реализуются, в соответствии с любым конкретным вариантом осуществления изобретения. Следует также понимать, что любая конкретная терминология, которая следует ниже, используется только для удобства, а изобретение не предполагается ограниченным никаким конкретным применением, идентифицированным или подразумеваемым в соответствии с такой терминологией.
МНОГОКОМПОНЕНТНЫЕ ДАТЧИКИ С ОДНОЙ МАССОЙ
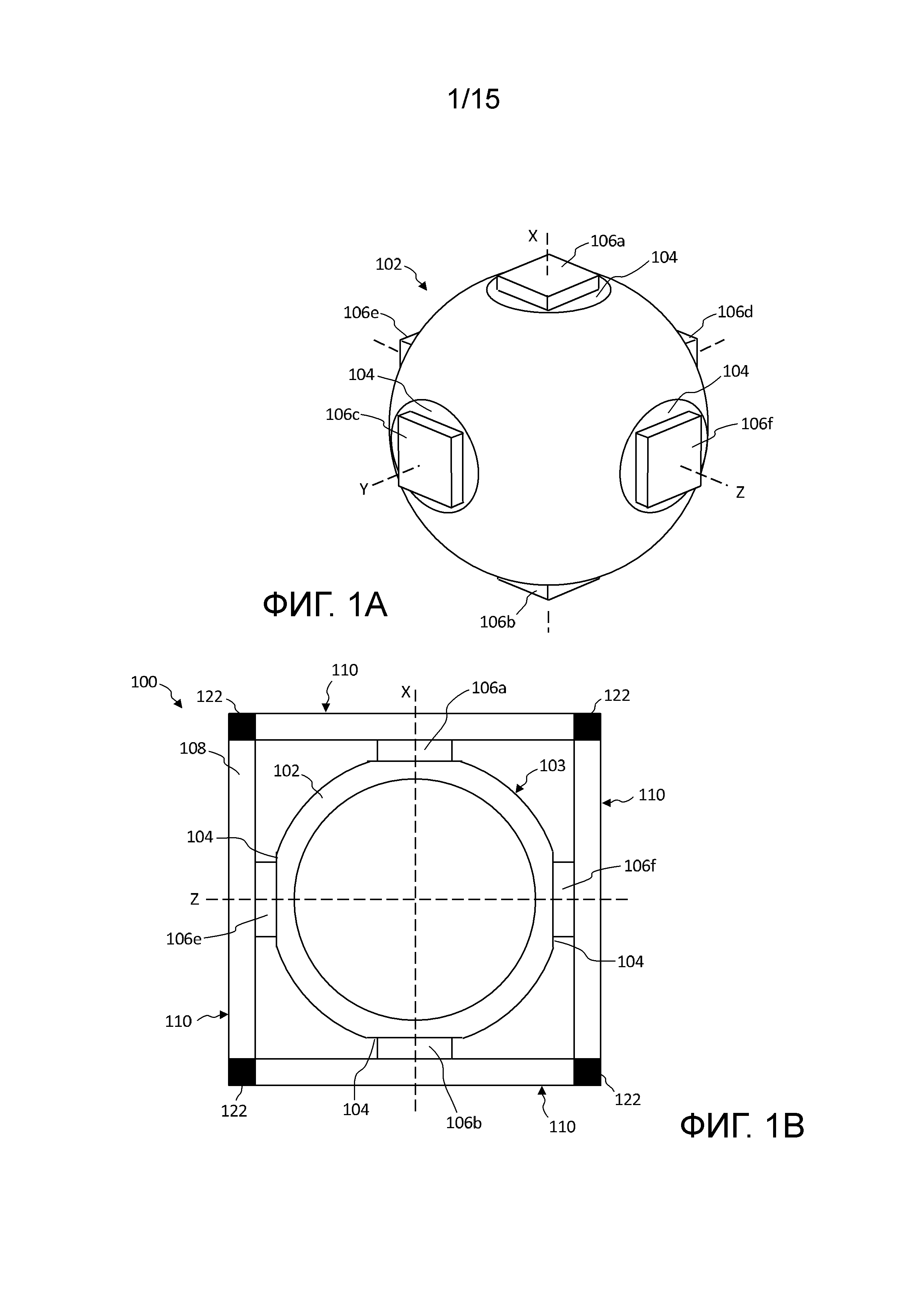
На фиг. 1А представлен изометрический вид тестовой массы или тела 102 многокомпонентного акселерометра или сейсмического сенсорного устройства 100. На фиг. 1В представлен разрез по плоскости X-Z из фиг. 1 многокомпонентного сейсмического датчика 100, включающего такую массу 102.
На фиг. 1А и 1В показан типичный многокомпонентный акселерометр с одной массой или датчик 100 ускорения с одной (унитарной) центральной тестовой массой 102. В этих вариантах осуществления масса 102 может быть представлена как полая сфера с некоторым количеством отдельных элементов датчика или преобразователей 106a-106f, распределенных по периметру. Например, как показано на фиг. 1А и фиг. 1В, пары 106a и 106b, 106c и 106d, 106e и 106f преобразователей могут быть расположены вдоль главных осей X, Y и Z массы, соответственно.
Кроме того, возможны другие конфигурации массы 102, например, сплошная сфера или многогранная форма, имеющая симметрию относительно осей X, Y и Z. Обычно формы, которые являются симметричными относительно одной или нескольких осей перемещения или поворота, являются подходящими для достижения заданных результатов измерений в акселерометре, описанном в этой заявке. В ином случае масса 102 может быть асимметричной относительно одной или нескольких осей X, Y, Z. Кроме того, масса 102 может быть сплошной, а не полой, и образованной либо из одного по существу однородного материала, либо из одного или нескольких основных материалов различных видов и дополнительных слоев или компонентов, которые образуют внешний слой или внешнюю поверхность 103 массы 102. Решение относительно того, каким должно быть тело или масса 102, полой или сплошной, и однородной или выполненной из многочисленных материалов и слоев, является проектным решением, принимаемым с учетом удовлетворения динамических требований, предъявляемых к измерениям как линейного, так и углового ускорения в конкретных условиях или случаях применения.
В зависимости от варианта осуществления одна из массы 102 и внешней поверхности 103 ее или обе могут быть образованы из электропроводного материала для получения электропроводной дорожки для соединения с электродом датчика или преобразователя, описанного в этой заявке. Например, масса 102 может быть образована как сплошная или полая сфера из алюминия, латуни, меди, бериллиевой меди или другого электропроводного материала, или масса 102 может быть образована из керамики или другого электроизоляционного материала с электропроводным покрытием на внешней поверхности 103 (например, из золота, алюминия или другого электропроводного покрывающего металла).
В ином случае одна из массы 102 и внешней поверхности 103 массы или обе могут изготавливаться из не обладающего электропроводностью или электроизоляционного материла, например, для уменьшения влияния паразитной емкости на отношение сигнала к шуму (С/Ш) датчика 100, обусловленной электропроводной областью массы 102. Если такое влияние емкости не подходит для конкретного применения, массу 102 можно изготавливать из не обладающих электропроводностью материалов. Например, массу 102 можно образовывать в виде сплошной или полой сферы из механически обрабатываемой керамики (например, из материала MACOR) или из пластика инжекционного формования.
Как показано на фиг. 1А и 1В, масса 102 может быть образована вместе с некоторым количеством датчиков или преобразователей 106а-106f, расположенных на различных поверхностях 104 крепления. Если ускорение или вращательное перемещение желательно определять по более чем одному независимому направлению, преобразователи можно располагать вдоль независимых (например, поперечных или ортогональных) осей X, Y, Z. Например, в варианте осуществления, показанном на фиг. 1А и 1В, три пары 106a и 106b, 106c и 106d, 106e и 106f из шести отдельных преобразователей расположены попарно, при этом преобразователи каждой пары находятся на противоположных сторонах, и связаны с соответствующими плоскими поверхностями 104 крепления, которые расположены на пересечениях перпендикулярных осей X, Y и Z и внешней поверхности 103 массы 102.
Поверхности 104 крепления могут быть приспособлены для содействия присоединению отдельных датчиков ускорения или преобразователей 106a-106f силы к телу тестовой массы 102. Например, как показано на фиг. 1А и 1В, шесть датчиков 106a, 106b, 106c, 106d, 106e, 106f ускорения прикреплены к парам противоположных поверхностей 104 для восприятия ускорения при прямолинейном перемещении или повороте массы 102 по трем ортогональным направлениям, задаваемым перпендикулярными осями X, Y и Z. Конкретные реализации пьезоэлектрических преобразователей 106a-106f можно использовать для измерения локального силового отклика, обусловленного ускорением и поворотом массы 102, например, в ответ на внешние крутящие моменты и силы, обусловленные падающей сейсмической энергией. В контексте океанического донного узла (ОДУ) или другого сейсмического приемника такие силы могут вызываться сейсмическими или акустическими волнами, распространяющимися через окружающую водяную толщу или другую сейсмическую среду. Преобразователи силы или датчики 106a-106f ускорения могут быть выбраны для получения высокой чувствительности к таким эффектам, чтобы надлежащим образом характеризовать отклик тестовой массы или тела 102 на падающую сейсмическую энергию.
Для получения эталонной структуры, необходимой для измерения перемещения массы 102 датчиками 106a-106f ускорения, масса 102 может подвешена внутри рамы или корпуса 108 и ограничена рамой или корпусом. В варианте осуществления, показанном на фиг. 1В, рама 108 может быть в виде симметричной коробки или в виде другой структуры, обычно с параллельными стенками, или в виде прямоугольной призматической структуры.
В некоторых вариантах осуществления рама 108 может быть выполнена из электропроводного материала. При таком выполнении может быть желательным, чтобы каждый компонент рамы или боковая стенка 110 рамы 108 была электрически изолирована от других компонентов или боковых стенок 110 рамы, например, при использовании механических изоляторов или электроизолирующих соединений 122, расположенных между боковыми элементами 110 в каждом соответствующем углу рамы 108. В других вариантах осуществления боковые элементы 110 рамы 108 могут быть выполнены из электроизоляционного материала, например, если существует опасение, что паразитная емкость, создаваемая проводящей областью рамы 108, может влиять на отношение сигнала к шуму (С/Ш) сенсорного устройства 100. Если такие емкостные эффекты являются неприемлемыми при конкретных применениях, раму 108 можно изготавливать из непроводящих материалов.
Радиальные внешние стороны отдельных датчиков 106a-106f ускорения (расположенные противоположно соединительным поверхностям 104) могут быть прикреплены к соответствующим боковым компонентам 110 рамы или корпуса 108. При этом масса 102 будет воздействовать на пары 106а и 106b, 106c и 106d, 106е и 106f датчиков или преобразователей при перемещении относительно и внутри рамы 108, а рама будет 108 жестко фиксирована, например, на стационарной платформе или ограничена структурой, на которую воздействуют сейсмические волны. Поскольку масса 102 прикреплена к раме 108 через посредство датчиков 106a-106f ускорения, поступательное перемещение и ускорение массы 102 относительно рамы 108 может быть измерено датчиками 106a-106f по трем ортогональным пространственным направлениям.
При такой конфигурации предпочтительно выбирать такой пьезоэлектрический датчик, как датчик 106a-106f ускорения, который выполнен с возможностью реагирования на напряжение сдвига на противоположных сторонах пьезоэлектрического устройства. Такой преобразователь, регистрирующий напряжение сдвига или реагирующий на него, может обеспечить более высокую чувствительность вследствие конфигурации массы 102 внутри рамы 108 и поставленной задачи измерения относительного ускорения между ними двумя. В некоторых примерах реализаций преобразователь может быть пьезоэлектрическим монокристаллом, например, кристаллом ниобата свинца магния/титана свинца (НСМ-ТС) или другим подходящим преобразователем.
Пьезоэлектрические элементы, изготовленные из монокристаллов, могут иметь лучшие характеристики обнаружения сейсмических сигналов по сравнению с поликристаллическими элементами. Кроме того, монокристаллические преобразователи могут быть относительно нечувствительными к тепловым воздействиям и могут иметь высокие коэффициенты преобразования механической энергии в электрическую энергию. При разрезании монокристалла под надлежащим углом поперек ориентации кристалла можно получать преобразователь с высокой чувствительностью к сдвигающим нагрузкам и силам (в противоположность натяжению или сжимающим нагрузкам и силам).
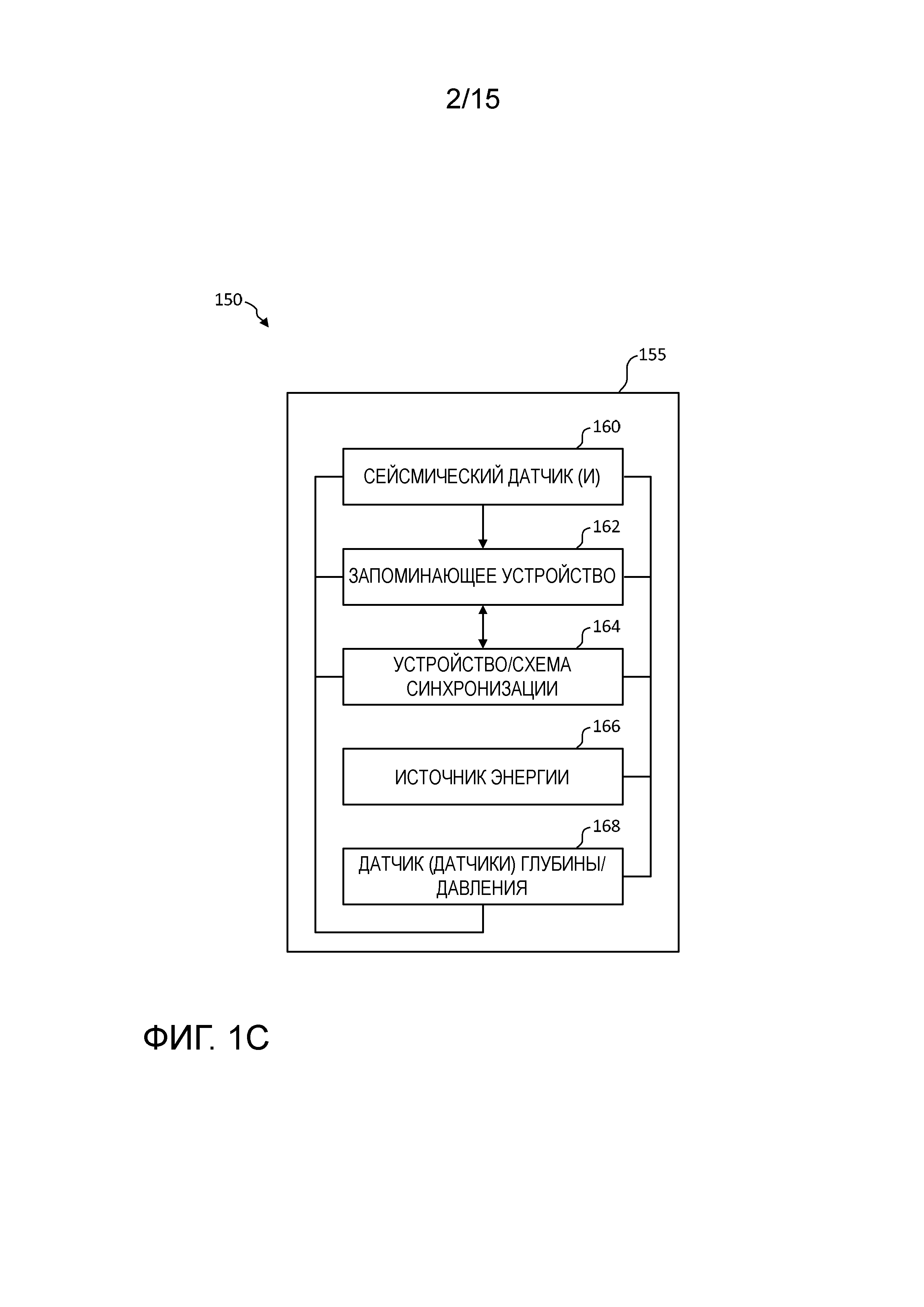
На фиг. 1С представлена структурная схема, иллюстрирующая типичные компоненты океанической донной сейсмической сенсорной станции или сейсмического узла 150 согласно различным вариантам осуществления изобретения. Как показано на фиг. 1С, сейсмический приемник или узел 150 может включать в себя один или несколько сейсмических датчиков 160 и запоминающее устройство 162, расположенные в одном или нескольких компонентах 155 модульного корпуса. Сейсмические датчики 160 могут включать в себя любое количество и сочетания многокомпонентных сейсмических датчиков ускорения с одной массой, описанных в этой заявке, и других датчиков, таких как гидрофоны, геофоны, акселерометры и т.п.
В некоторых вариантах осуществления датчики 160 могут включать в себя трехкомпонентный (3К) датчик, выполненный с возможностью измерения трех пространственных составляющих сейсмических волн. В некоторых вариантах осуществления датчики могут измерять линейное перемещение, поворот или то и другое. Кроме того, сейсмические датчики 160 могут включать в себя цифровые датчики, например, акселерометр на основе микроэлектромеханической системы (МЭМС). При использовании цифровых датчиков можно получать преимущества, заключающиеся в возможности выполнения автоматической калибровки, в пониженном отклонении от нормативов между датчиками в процессе производства, улучшенной частотной характеристике, неизменной характеристике при любой ориентации, в том числе в малоразмерном или компактном конструктивном оформлении.
Примеры этих и других подходящих сенсорных устройств раскрыты в патенте США №6883638 (Peter Maxwell et al.) под названием ʺAccelerometer transducer used for seismic prospectingʺ, с приоритетом от 16 марта 2009 года, который полностью и для всех целей включен в эту заявку путем ссылки. В некоторых вариантах осуществления сейсмические датчики 160 могут включать в себя пьезоэлектрические датчики. Примеры подходящих пьезоэлектрических датчиков раскрыты Ken Kan Deng в патенте США №9294011 и заявке №13/984266 на патент США (публикации США №2013/0319118), в патенте и заявке под названием ʺMethod and apparatus for sensing underwater signalsʺ и с приоритетом от 7 февраля 2012 года, которые полностью и для всех целей включены в эту заявку путем ссылки.
Предпочтительно, чтобы запоминающее устройство 162 было оперативным запоминающим устройством, или носителем данных, или другим компонентом запоминающего устройства с объемом, достаточным для хранения заданного количества сейсмических данных. Хотя запоминающее устройство 162 показано как единое целое, следует понимать, что запоминающее устройство 162 на самом деле может содержать множество компонентов или модулей запоминающего устройства и запоминающее устройство 162 может существовать на многочисленных операционных уровнях, начиная с быстродействующих регистров и сверхоперативных запоминающих устройств и кончая менее быстродействующими кристаллами динамических оперативных запоминающих устройств и другими компонентами запоминающего устройства.
В некоторых вариантах осуществления узел 150 может включать в себя одно из устройства синхронизации или схемы 164 синхронизации или то и другое и источник питания или источник 166 энергии. В некоторых вариантах осуществления устройство 164 синхронизации может включать в себя резонатор, кварц или генератор, выполненный с возможностью генерации синхронизирующего сигнала для регистрации сейсмических данных. В некоторых вариантах осуществления устройство 164 синхронизации может быть выполнено с возможностью независимой генерации синхронизирующего сигнала для сейсмической сенсорной станции или узла 150. В иных вариантах осуществления устройство 164 синхронизации может быть выполнено с возможностью приема внешнего синхронизирующего сигнала с ведущего устройства синхронизации и генерации локального синхронизирующего сигнала для узла 150 на основании принимаемого внешнего синхронизирующего сигнала.
Источник 166 энергии может быть выполнен с возможностью снабжения электроэнергией одного или нескольких из датчиков 160, запоминающего устройства 162 и других электронных схем в узле 150. В некоторых вариантах осуществления источник 166 энергии может включать в себя аккумулятор с достаточно большой емкостью для снабжения электроэнергией сейсмического узла 150 в течение заданного времени выполнения сейсморазведки. Кроме того, в зависимости от варианта осуществления электроэнергия может подводиться к узлу 150 извне от источника энергии по кабелю или с помощью индуктивной связи или иным образом, описанным в этой заявке.
В некоторых вариантах осуществления узел 150 может включать в себя один или несколько датчиков 168 глубины и/или давления. Датчики 168 глубины или давления могут быть выполнены с возможностью определения глубины погружения сейсмической сенсорной станции во время развертывания и/или извлечения. В таких вариантах осуществления может быть задана пороговая глубина для переключения сейсмической сенсорной станции в рабочий режим или режим прекращения действия. Например, во время развертывания датчики, запоминающее устройство и другие схемы узла 150 могут не снабжаться электроэнергией до тех пор, пока не будет достигнута пороговая глубина погружения, измеряемая датчиками 168 глубины/давления. Точно так же, во время извлечения, когда достигается пороговая глубина погружения, одна или несколько схем сейсмической сенсорной станции могут быть отключены от электропитания. При избирательном снабжении электроэнергией одной или нескольких схем узла 150 в этих вариантах осуществления может сохраняться электроэнергия и увеличиваться продолжительность работы сейсмической сенсорной станции во время операций по регистрации сейсмических данных.
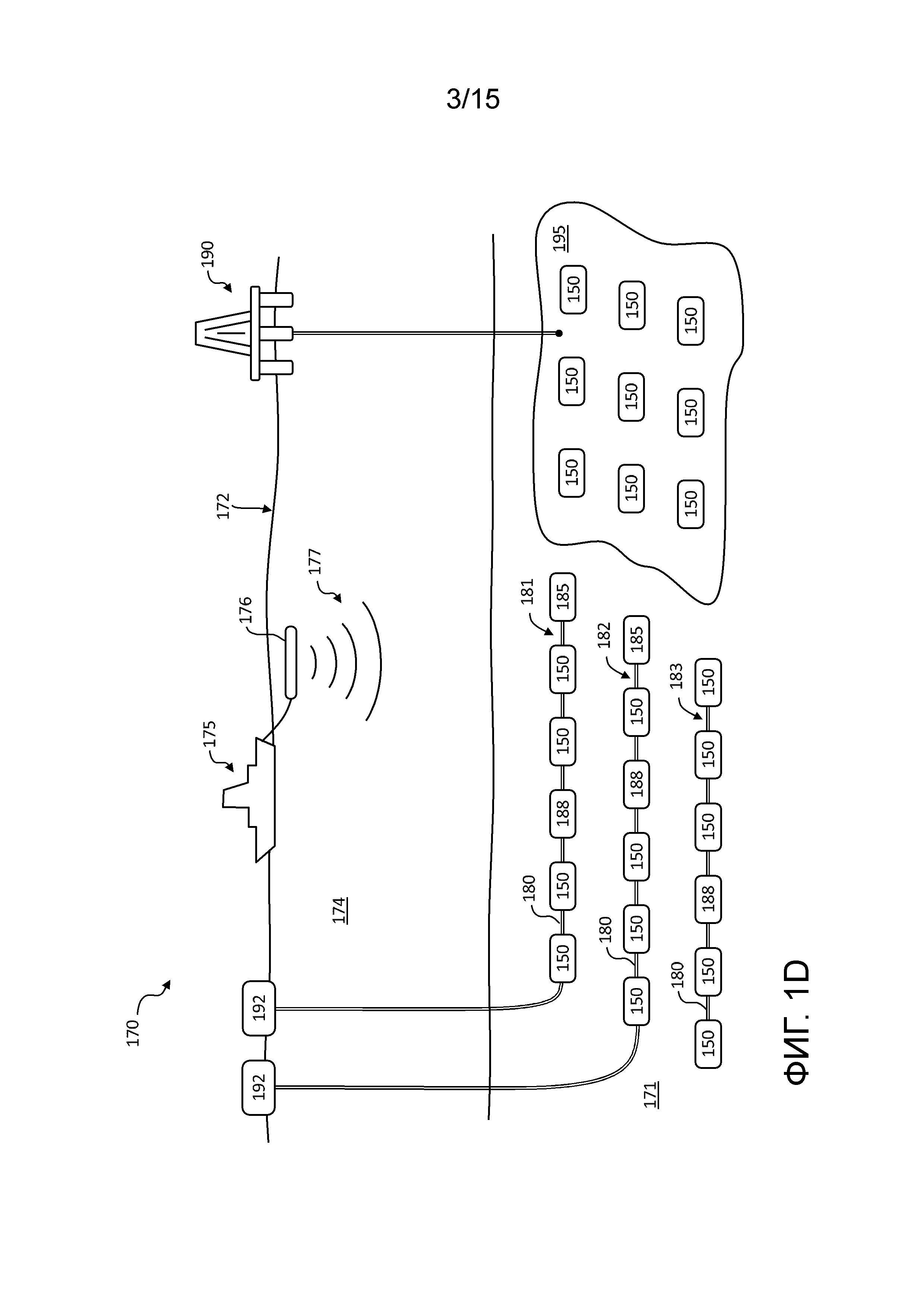
На фиг. 1D показаны типичная сейсморазведочная установка и способ 170 согласно различным вариантам осуществления изобретения. Как показано на фиг. 1D, множество автономных сенсорных станций или узлов 150 могут быть развернуты на морском дне 171 или подобным же образом ниже поверхности 172 водной массы или водяной толщи 174.
Как показано на фиг. 1D, два или большее количество узлов 150 могут быть развернуты на ложе моря или морском дне с помощью соответствующего троса или проволочного троса 180. В некоторых вариантах осуществления трос 180 может быть выполнен из синтетического материала с заданной удельной плотностью относительно удельной плотности воды, в которую он погружается. В некоторых вариантах осуществления трос 180 может быть пассивным тросом, например, трос 180 может не включать в себя никаких электрических проводников. В иных вариантах осуществления трос или кабель 180 может включать в себя встроенные проводники для передачи одного или нескольких из синхронизирующего сигнала, сигналов данных, управляющих сигналов и электроэнергии между отдельными сейсмическими узлами 150. Таким образом, трос или кабель 180 может иметь пассивную конфигурацию, при этом отсутствует передача сигналов или электроэнергии, или активную конфигурацию, при которой предусмотрены сигнальные соединения и/или соединения по электропитанию.
Хотя в этом конкретном примере могло упоминаться ложе моря или морское дно, варианты осуществления изобретения не ограничены водной массой или водяной толщей какого-либо конкретного вида. Точнее, различные варианты осуществления можно приспосабливать для использования в любой водной среде, морской среде или в береговых условиях, включая океаны, озера, реки другие геологические районы. В соответствии с этим использование в этой заявке терминов море, морское дно, ложе море и т.п. следует понимать широко для охвата всех водных масс и других сейсмических сред 174 и любых соответствующих поверхностей 171, пригодных для наблюдения распространяющейся сейсмической энергии с помощью сейсмического узла или приемника 150.
В конкретных вариантах осуществления один или несколько сейсмических узлов 150 могут быть развернуты на ложе моря или другой поверхности 171 с помощью подходящей технологии, включая, но без ограничения, с помощью дистанционного управляемого аппарата или автономно управляемого аппарата (ДУА или АУА) или путем сбрасывания узлов 150 с выпускающего судна или сейсмического судна 175. В других вариантах осуществления автономные узлы 150 могут быть снабжены движительной системой и запрограммированы на плавание через водяную толщу 174 к заданным местам и с заданных мест на ложе 171 моря. Как можно видеть на фиг. 1D, развертывание отдельных сейсмических узлов 150 без троса 180 может быть предпочтительным в областях вблизи препятствий, например, в рабочей области 195 ложа 171 моря, связанной с установкой 190 для бурения нефтяных скважин или для проведения других работ, чтобы исключить приход троса 180 в контакт с другими подводными компонентами и другими препятствиями и возможное повреждение его во время развертывания и/или извлечения узлов 150.
В некоторых вариантах осуществления развертываемые на тросе сейсмические сенсорные станции могут быть соединены с вешкой или буем 192. Например, отрезки 181 и 182 троса показаны соединенными с соответствующими вешками 192. Хотя вешки 192 показаны расположенными на плавающих буях, это является только типичным случаем, и в иных вариантах осуществления одна или несколько вешек 192 могут быть размещены на ложе 171 моря. Кроме того, вешки 192 могут быть выполнены с возможностью плавания или зависания на заданной глубине ниже поверхности 172 или выше ложа 171 моря в водяной толще 174.
В некоторых вариантах осуществления вешки 192 могут включать в себя высокоточное или ведущее устройство синхронизации и компоненты связи, выполненные с возможностью обмена данными и/или электроэнергией с узлами 150. Например, ведущий синхронизирующий сигнал от высокоточного устройства синхронизации может передаваться к узлам 150 по проводникам в тросах 180 для содействия коррекции устройств синхронизации или для образования локальных синхронизирующих сигналов в узлах 150.
Кроме того, в некоторых вариантах осуществления вешки 192 могут быть выполнены с возможностью передачи электроэнергии, данных и/или управляющих сигналов на узлы 150. В соответствии с этим вешки 192 могут быть снабжены устройствами выработки электроэнергии или аккумулирования энергии и/или логическим устройством управления для выполнения проверок качества и реализации заданных рабочих протоколов и т.п. В некоторых вариантах осуществления сигналы, посылаемые с вешек, могут использоваться, например, для осуществления зарядки аккумуляторов сенсорных станций, для выполнения проверки качества/технического состояния станций, для включения/выключения станций и т.д. В некоторых вариантах осуществления устройства на вешках 192 могут быть снабжены устройством глобальной спутниковой системы определения местоположения (GPS) или другой системы определения местоположения или навигации, и/или радиопередающим/приемным устройством для содействия определению местоположения вешки 192 и/или облегчения связи с устройством на вешке 192 и/или узлами 150.
В вариантах осуществления, в которых один или несколько тросов 180 выполнены с возможностью передачи электроэнергии и/или сигналов данных, хвостовое оконечное устройство 185 может быть расположено на конце каждого троса 180. Кроме того, отдельное головное оконечное устройство может быть предусмотрено в устройстве вешки 192, а морская вода может использоваться для связи головного и хвостового оконечных устройств.
В некоторых вариантах осуществления одно из оконечных устройств 185 или оба этих устройства и устройства на вешках 192 могут быть опущены. Например, типичный отрезок 183 троса показан без присоединения к соответствующему устройству на вешке 192 и без хвостового оконечного устройства 185.
Что касается опять фиг. 1D, то катер или судно 175 с источником может быть выполнено с возможностью буксирования сейсмического источника 176 при проведении сейсморазведки в районе сейсмических узлов 150. В некоторых вариантах осуществления сейсмический источник 176 может быть воздушной пушкой (или некоторым количеством отдельных воздушных пушек), выполненной с возможностью выброса сильной струи сжатого воздуха в водяную толщу 174, излучающей акустическую энергию к морскому дну 171. Как показано на фиг. 1D, сильная струя сжатого воздуха создает сейсмические волны 177, которые распространяются вниз через водяную толщу 171 к морскому дну 171 и которые могут проникать сквозь морское дно 171 с отражением от подземных структур и структур ниже морского дна. Отражения от подземных структур могут регистрироваться на узлах 150 как сейсмические данные, а затем могут обрабатываться для образования изображения соответствующих подземных слоев и других структур. Эти изображения могут анализироваться геологами для идентификации областей, которые могут содержать углеводороды и запасы других полезных ископаемых, и для идентификации других геофизических объектов, представляющих интерес.
В некоторых вариантах осуществления множество катеров или сейсмических судов 175 с источниками могут одновременно работать при регистрации сейсмических данных с узлов 150. В вариантах осуществления, в которых используются многочисленные суда 175, соответствующие сейсмические источники 176, связанные с судами, могут быть выполнены с возможностью одновременной работы. Например, источники 176 двух или большего катеров 175 с источниками могут быть выполнены с возможностью по существу одновременного излучения сейсмической энергии или с такой заданной задержкой, при которой имеется по меньшей мере некоторое перекрытие во время излучения сейсмической энергии от двух или большего количества источников 176.
В некоторых вариантах осуществления высокоточное устройство синхронизации может быть включено в каждый приемник или сейсмический узел 150 или в отдельные приемники или сейсмические узлы 150. В иных вариантах осуществления высокоточный синхронизирующий сигнал может подаваться с внешнего ведущего устройства синхронизации, выполненного с возможностью согласования с ведомыми устройствами синхронизации, реализованными в сейсмических узлах 150. Ведущее устройство синхронизации может быть расположено в устройстве на вешке 192 или в устройствах 188, размещенных с заданными промежутками вдоль одного или нескольких отдельных тросов или кабелей 180.
В некоторых вариантах осуществления устройства 188 могут включать высокоточное устройство синхронизации и интерфейс или другие связные компоненты. В иных вариантах осуществления устройства 188 могут также включать в себя другие компоненты, такие как источник питания. В других вариантах осуществления одно или несколько таких устройств 188 могут быть сконфигурированы как «суперстанция» или подобный сейсмический узел, например, как сейсмическое сенсорное устройство со всеми компонентами сейсмического узла 150, а также как высокоточное устройство синхронизации, используемое для формирования ведущего синхронизирующего сигнала для других соседних сейсмических узлов 150.
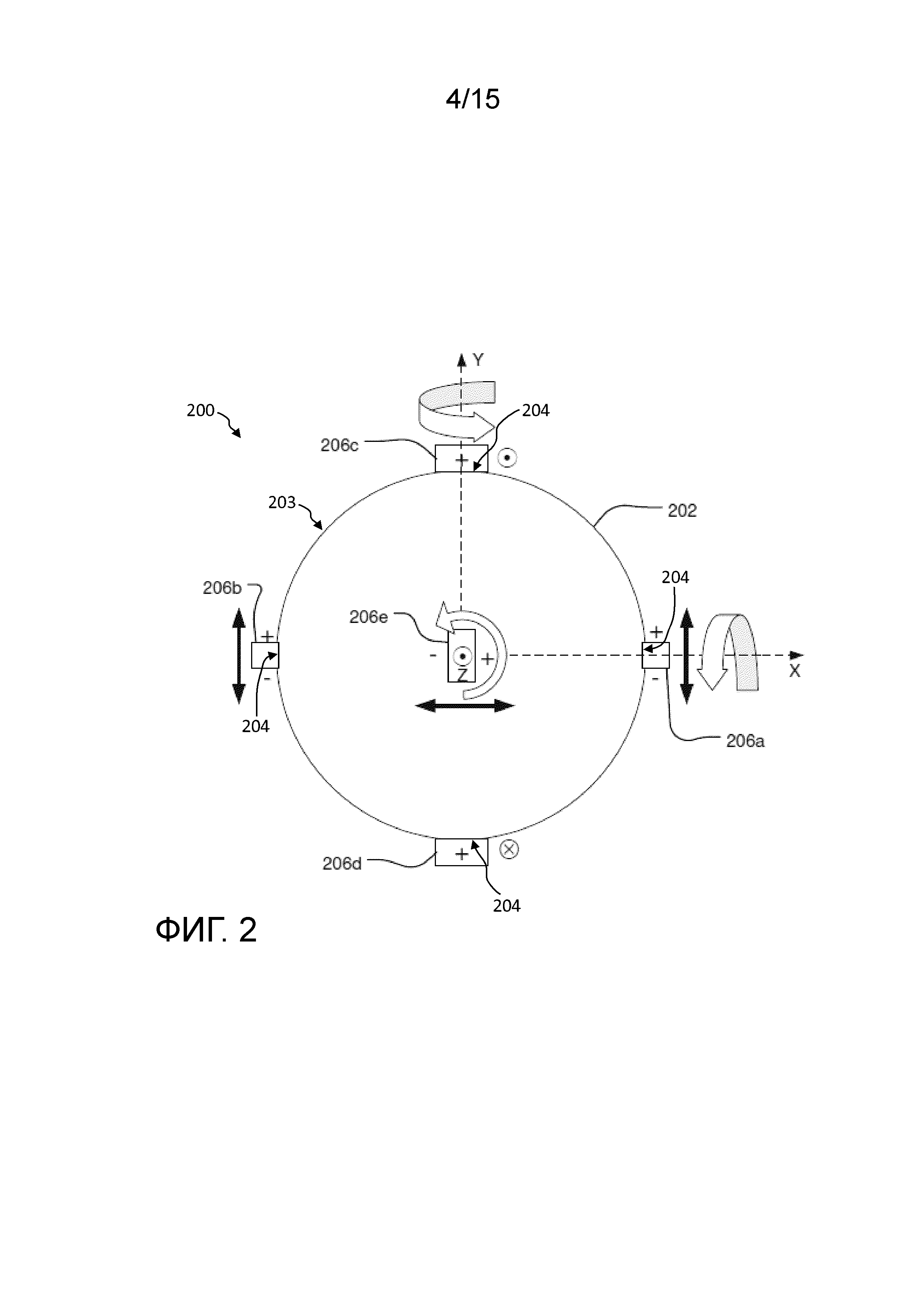
На фиг. 2 представлен схематичный вид приведенной для примера конфигурации датчика для многокомпонентного сейсмического сенсорного устройства 200 с одной массой. Как показано на фиг. 2, в таких примерах может использоваться конструкция датчика, соответствующая акселерометру 100 с одной массой из фиг. 1А и 1В.
Несколько наборов пьезоэлектрических преобразователей или элементов 206a и 206b, 206c и 206d, 206e и 206f датчиков ускорения могут быть установлены (например, при использовании электропроводного клея) на сферической центральной тестовой массе или теле 202 (например, выполненном из латуни или другого металла или с электропроводным покрытием), которое действует как общее основание для преобразователей 206a-206f.
В одной такой конфигурации масса 202 может иметь диаметр, примерно равный по меньшей мере максимальной длине компонента кристалла преобразователя, умноженной на семь (то есть, 7×3,5 мм или≥25 мм). В некоторых конкретных вариантах осуществления могут использоваться пьезоэлектрические преобразователи 201a-206f сдвиговых мод, например, продолговатые или имеющие подобную форму кристаллические преобразователи 206a-206f с размерами приблизительно 3,5 мм × 2 мм × 1 мм. В более общем случае, в зависимости от применения форма и размеры преобразователей 206a-206f, каждого отдельно или в наборе, могут изменяться.
Тестовая масса 202 может иметь параллельные плоские соединительные поверхности 204, расположенные на противоположных концах ортогональных осей X, Y, Z и, кроме того, образованные с неглубокими выемками или полостями с размерами, выбранными из условия размещения преобразователей 206a-206f для гарантии нахождения преобразователей в заданном положении, в дополнение к использованию клея или другого механического крепления. Первый набор пьезоэлектрических преобразователей 206a, 206b образует линейный акселерометр, ориентированный из стороны в сторону на фиг. 2, на противоположных сторонах массы 202 вдоль горизонтальной оси X и акселерометр углового ускорения с чувствительностью к повороту вокруг оси X. Длинная ось или продольный размер кристаллических элементов, образующих преобразователи 206а, 206b, может быть ориентирован в плоскости чертежа и вне ее, например, как показано, в плоскости X-Z.
Второй набор или пара из двух преобразователей 206с, 206d может быть аналогичным образом установлена вдоль вертикальной оси Y, при этом наибольший размер или ось кристаллических элементов, образующих преобразователи 206с, 206d, повернута перпендикулярно к оси первой пары 206a и 206b преобразователей, например, как показано, ориентирована в плоскости X-Y. Третий набор преобразователей 206e, 206f (преобразователь 206f из пары расположен позади массы 202) может быть установлен на противоположных концах оси Z, при этом длинные оси кристаллических элементов, образующих преобразователи 206е, 206f, повернуты перпендикулярно к ориентации первой и второй пар 206a и 206b, 206c и 206d преобразователей, например, как показано, ориентированы в плоскости Y-Z.
Таким образом, ориентация каждого набора или пар 206a и 206b, 206c и 206d, 206e и 206f преобразователей может быть ортогональна к ориентации других наборов, например, как показано на схематичном виде из фиг. 2, когда пары соответствующих кристаллов установлены так, что их наибольший размер ориентирован в плоскостях X-Y, X-Z и Y-Z, соответственно. Следует отметить, что символы «+» и «-» вблизи (или поверх) каждого из преобразователей 206a-206f на фиг. 2 указывают на сдвиговое выравнивание преобразователей 206 и не обязательно указывают на местоположение или полярность электродов, соединенных с преобразователями 201a-206f. В общем случае, как описано в этой заявке, сдвиговое выравнивание и полярность соответствующих электродов могут изменяться.
Наружный корпус или рама сенсорного устройства 200 (см., например, фиг. 1В) может быть выполнена из подходящего жесткого не обладающего электропроводностью материала (например, из керамики) и выполнена с возможностью поддержания относительной ориентации и положения центральной массы 202 при соединении каждого из преобразователей 206a-206f с соответствующей стороной рамы. Сама рама может быть образована из частей, жестко соединенных друг с другом вокруг массы 202. В ином случае в раме или корпусе может быть предусмотрен проем, имеющий размеры, подходящие для вставления массы 202 вместе с прикрепленными преобразователями 206a-206f в первой выбранной ориентации (например, с преобразователями, ориентированными по диагоналям к углам) и затем поворота во вторую выбранную ориентацию для соединения массы 202 в фиксированном положении относительно рамы (например, с преобразователями вблизи перпендикулярных элементов рамы).
В любом из этих примеров выбранный (например, отрицательный) электрод каждого из преобразователей 206a-206f может быть ориентирован по направлению к внешней поверхности 203 прилегающей массы 202 и может находиться с ней в контакте, при этом другой (например, положительный) электрод, расположенный на противоположной поверхности, является доступным для контакта с помощью проволочного вывода или другого электрического контакта с рамой или корпусом. Например, положительные электроды преобразователей 206a-206f могут быть соединены с сигнальными выходными контактами проводом (например, припаянным или приваренным). Кроме того, каждый элемент рамы корпуса может быть электрически изолирован от других элементов рамы для предотвращения помехи от сигналов, создаваемых отдельными индивидуальными преобразователями 206a-206f.
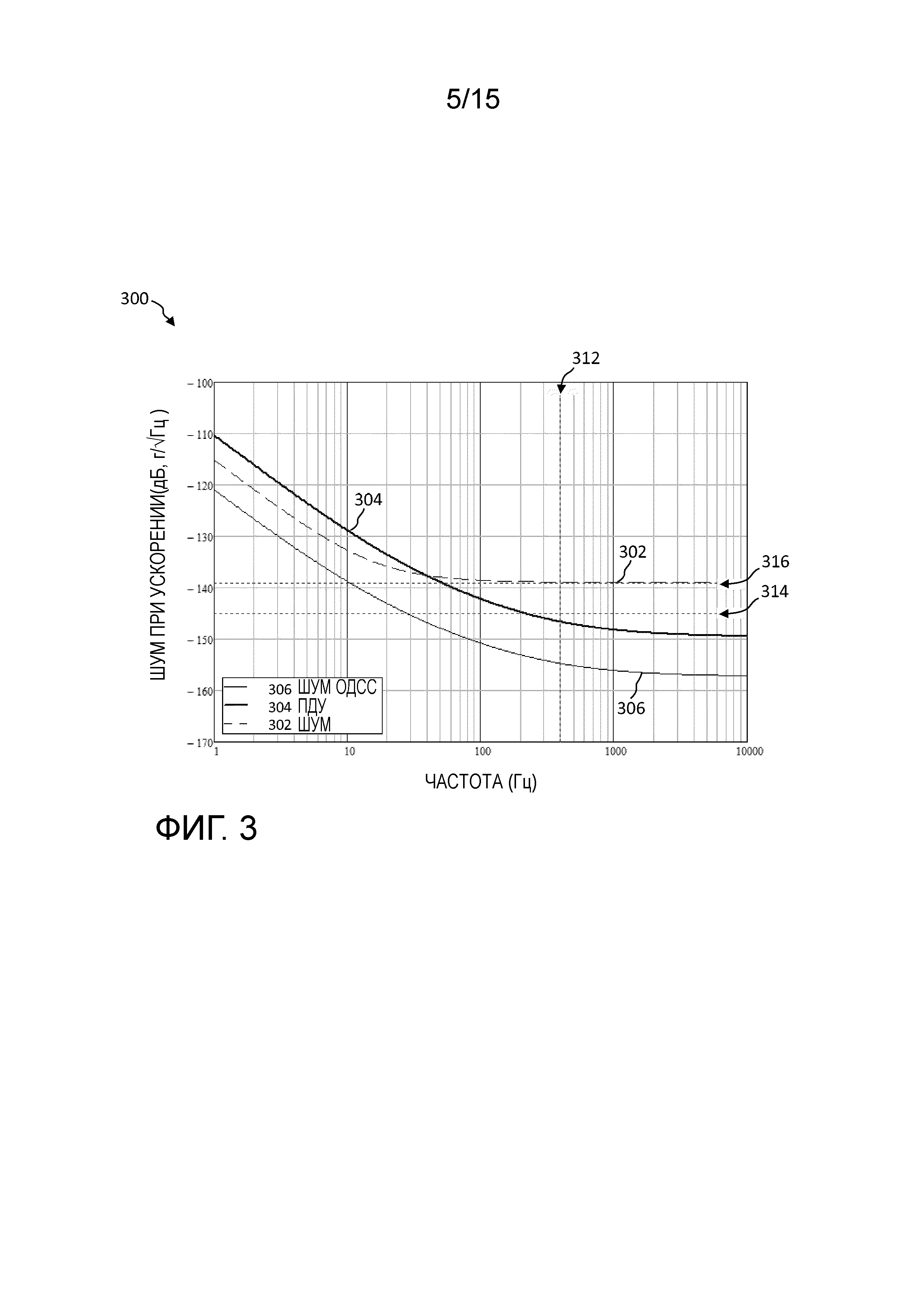
На фиг. 3 представлен график 300 зависимости шума от частоты для типичной конструкции сейсмического датчика. Как показано на фиг. 3, шум значительно снижается на протяжении представляющего интерес частотного диапазона. Результаты показаны для заданной базовой или эталонной функции шума (кривая 302), для типичного компонента пьезоэлектрического датчика ускорения (ПДУ) (кривая 304) и для типичной океанической донной сенсорной системы (ОДСС) (кривая 306). Кроме того, показаны выбранная эталонная частота около 400 Гц (линия 312), а также эталонный интервал подавления от около -145 дБ (линия 314) до около -139 дБ (линия 316).
Как в общем показано на фиг. 3, каждый из основных механических параметров, относящихся к диаметру и массе (как к плотности, так и распределению), и конфигурация преобразователя могут быть выбраны из условия достижения заданного динамического диапазона при измерениях акселерометром как углового перемещения, так и поступательного перемещения. Например, подходящие параметры включают в себя значение ускорения тестовой массы 330 мg (3,234 м/с2) при 200 Гц (например, на основании энергии первого вступления на цифровое сенсорное устройство), при этом броуновский механический шум массы и корпуса по порядку величины находится ниже чем 20

КОНФИГУРАЦИИ ДАТЧИКОВ
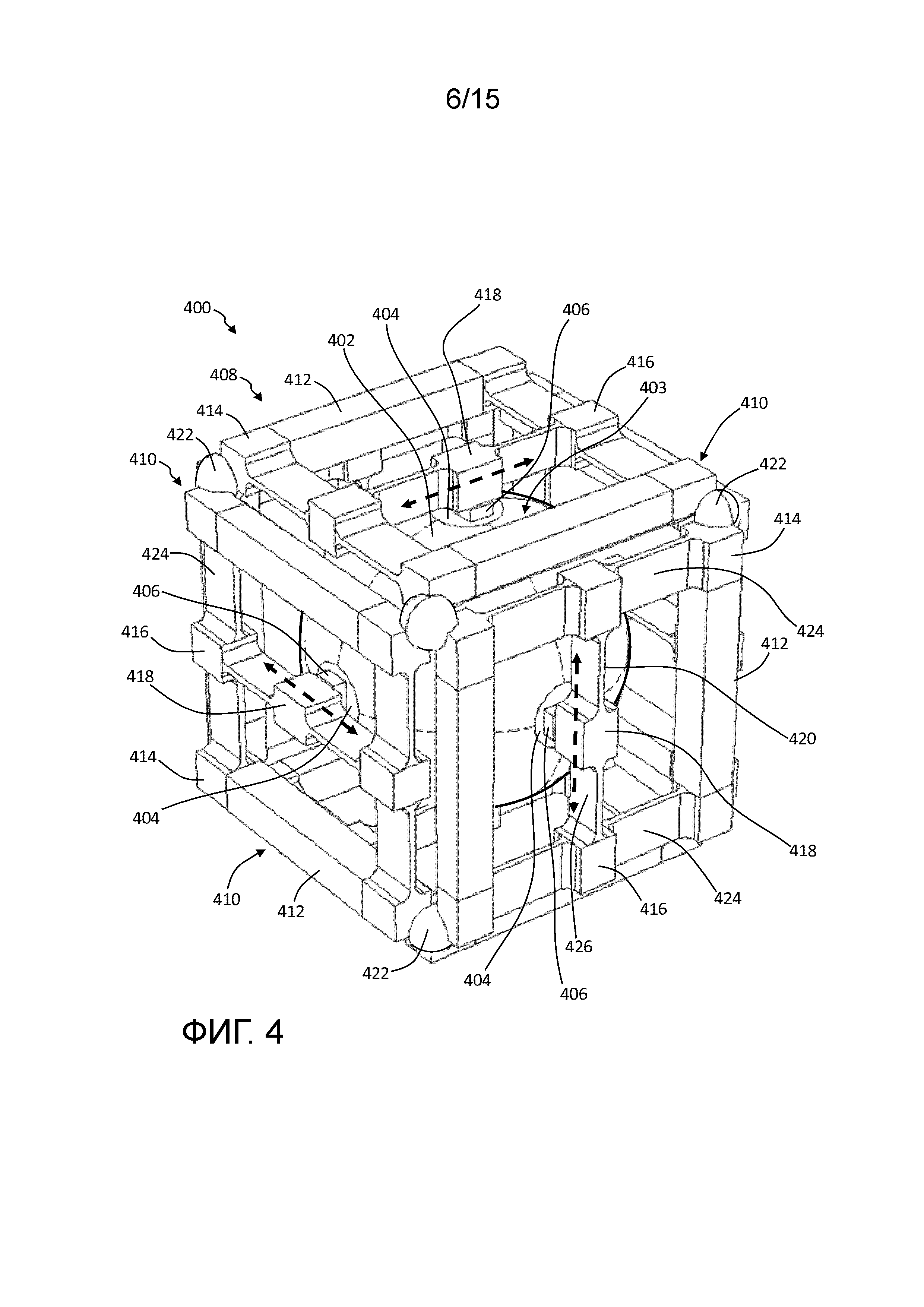
На фиг. 4 представлен изометрический вид типичного многокомпонентного сейсмического датчика 400 с одной центральной массой 402. В этой типичной реализации структурные элементы адаптированы к оценкам динамического диапазона, приведенным выше, а также к повышенной удельной электрической проводимости и конкретной изоляции для каждой из шести независимых преобразовательных цепей. Тестовая масса или тело 402 в этом варианте осуществления представляет собой электропроводную сферу с внешней поверхностью 403, пригодной для образования физического соединения, имеющего достаточную прочность и приемлемую удельную электрическую проводимость, с каждым элементом датчика или преобразователя 406 (например, имеющего тангенс электрических потерь δ≤0,004). Например, центральная масса 402 может быть выполнена из анодированного алюминия в качестве основного материала, покрытого поверхностным или внешним слоем 403 золота или другого проводника. Кроме того, масса 402 может быть масштабирована на основании удельного веса алюминия или другого основного материала. Плоские соединительные поверхности 404 могут быть образованы на поверхности 403 массы 402 и соединены с пьезоэлектрическими преобразователями 406, выровненными вдоль трех ортогональных осей, как описано выше, имеющих начало в центре массы 402.
Поверхности 404 образуют поверхности соединения и выравнивания, предназначенные для присоединения каждого из преобразователей 406. В некоторых вариантах осуществления неглубокая прямоугольная или продолговатая выемка может быть образована в каждой из поверхностей 404, приспособленная для надлежащего выравнивания преобразователей 406 и содействия присоединению преобразователей 406 к массе 402. Как правило, преобразователи 406 обычно образуют как плоские и удлиненные прямоугольные структуры и выравнивают так, чтобы преобразователи 406 пар на противоположных концах каждой оси были параллельны друг другу и относительно направления чувствительности к сдвигу кристалла. Каждую из других двух пар преобразователей 406 можно выравнивать аналогичным образом, чтобы преобразователи 406 в каждой паре были в основном параллельны по чувствительности к сдвигу, но ортогональны к расположениям на одной линии пар преобразователей по каждой из других двух осей.
В некоторых типичных реализациях преобразователи 406 могут содержать монокристаллический пьезоэлектрический материал, например, ниобат свинца магния - титанат свинца или другой подходящий материал, описанный в этой заявке, или же могут быть образованы из указанного материала. Преобразователи 406 можно приклеивать к поверхностям 404 электропроводным клеем таким образом, чтобы каждый из общих (отрицательных) контактов преобразователей 406 был в электрическом контакте с массой 402.
Масса 402 акселерометра 400 с одной массой может быть заключена в корпус или раму 408 с шестью боковыми элементами или компонентами 410 рамы, объединенными в противолежащие пары. Каждая пара сторон 410 может быть расположена вдоль одной из главных осей центральной массы 402, при этом каждая пара имеет ортогональную или поперечную ориентацию относительно других. Кроме того, каждая сторона 410 рамы 408 может состоять из двух поперечных стоек или поперечин 412, расположенных параллельно друг другу и совместно образующих по существу половину периметра каждой стороны 410. Поперечины 412 могут быть по существу одинаковыми по ширине и толщине (например, обычно квадратными в поперечном сечении поперек длины или продольного направления) и создают по существу жесткую структуру в трех измерениях.
Концы поперечных стоек или поперечин 412 могут быть соединены парой траверс 414, образующих остальной периметр каждой стороны 410. Траверсы 414 могут быть образованы вместе с секциями 424 плоской перемычки, продолжающимися от каждого из поперечных элементов 412, и соединены друг с другом в центре пролета центральным опорным или соединительным элементом 416. Плоские перемычки 424 могут находиться в плоскости каждой стороны 410 рамы 408, а опорный элемент 416 может быть образован по существу как куб или прямоугольная призма, например, с длиной, высотой и шириной, подобными поперечной ширине участков 424 плоской перемычки поперечного элемента 412.
Для завершения каждого бокового элемента 410 рамы центральный стержень 420 датчика продолжается между опорными элементами 416 траверс 414, ориентированных в основном параллельно поперечным элементам 412, и находится между ними. Каждый стержень 420 датчика может быть образован вместе с двумя секциями 426 плоской поперечной перемычки, соединенными друг с другом в центре пролета, например, опорным столбиком или держателем 418 датчика. Секции 426 плоской перемычки каждого стержня 420 датчика могут быть ориентированы перпендикулярно к плоскости соответствующей стороны 410 и перпендикулярно к секциям 424 плоской перемычки на траверсах 414. Опора 418 датчика может быть образована по существу как куб или прямоугольная призма, например, с длиной, высотой и шириной, аналогичными поперечной ширине секций 426 плоской перемычки стержня 420 датчика.
Как показано на фиг. 4, отдельные стороны 410 рамы 408 могут быть в основном плоскими или планарными и могут выполняться с жесткими конструктивными допусками и с высокой повторяемостью. В показанном варианте осуществления стороны 410 рамы 408 могут быть образованы из механически обрабатываемой керамики для максимизации ортогональных допусков и жесткости боковин 410. В других вариантах осуществления боковины 410 могут быть выполнены из алюминия или другого электропроводного металлического материала или из композиционного материала. Таким образом, боковые элементы 410 рамы 408 могут быть либо электропроводными, либо изолирующими.
Шесть отдельных боковых элементов 410 рамы могут быть скреплены друг с другом для образования жесткого кубического корпуса или рамы 408, которую располагают вокруг тестовой массы или центрального тела 402. Желательно соединять стороны 410 рамы 408 друг с другом с использованием изолирующих элементов 422 для уменьшения механической связи между соседними поперечными элементами 412 и траверсными элементами 414 в каждом отдельном компоненте 410 рамы, например, с использованием изолирующих элементов 422, расположенных на пересечениях углов боковин 410. Изоляторы 422 (всего восемь) могут минимизировать передачу механической и вибрационной энергии с одной стороны 410 рамы 408 к другой, когда масса 402 перемещается относительно рамы 408, например, как описывается в этой заявке, в ответ на сейсмическую энергию.
В вариантах осуществления, в которых компоненты 410 рамы выполнены из электропроводного материала (например, алюминия или другого металла) изоляторы 422 также могут быть электрическими изоляторами. Кроме того, в одном примере варианта осуществления каждый конец поперечных компонентов 412 может быть образован с вогнутой выемкой для приема показанного по существу сферического изолятора 422; однако могут использоваться изоляторы 422 других форм и конфигураций. В некоторых реализациях изоляторы могут быть образованы из стекла, керамики или стеклотекстолита G10, состоящего из стекловолокна и эпоксидной смолы. Поперечные элементы 412 и изоляторы 412 могут быть прикреплены друг к другу при использовании эпоксидной смолы или клея другого вида.
Внешние поверхности каждого из преобразователей 406 могут быть прикреплены к внутренней поверхности опоры 418 датчика на соответствующей стороне компонента 410 рамы, например, при использовании клея. Поскольку жесткий стержень 420 датчика присоединен на центральном участке каждой стороны 410, резонансная частота может быть относительно высокой.
Возможность минимизации поперечных влияний на пары параллельных преобразователей 406 в сенсорной системе 400 может зависеть от точности ортогонального выравнивания соответствующих осей кристаллов преобразователей 406 и точности поляризации кристаллов. Для большей экономичности, чувствительности и надежности каждая сторона 410 рамы 408 может содержать стержень 420 датчика, соединенный с боковым компонентом 410, который включает в себя одну или несколько секций 426 перемычки, относительно жестких вдоль оси восприятия и относительно мягких или менее жестких вдоль оси отсутствия восприятия. Эта конструкция является по существу подобной конструкции траверсных элементов 414, которые имеют секцию 424 плоской перемычки, соответствующую секциям 426 плоской перемычки стержней 420 датчика. В этой конфигурации может повышаться или становиться максимальной чувствительность прикрепленных преобразователей 406 по оси восприятия (например, в случае пары преобразователей, параллельной оси). Кроме того, в этом варианте осуществления траверсы 414 на каждой стороне 410 рамы 408 выполнены с возможностью ослабления действия сил вдоль ортогональных осей, действующих на соответствующие боковые компоненты 410 рамы 408.
Преимущество этой конструкции заключается в создании относительно высокого механического напряжения сдвига на преобразователях 406 по главному или основному направлению восприятия, например, вдоль продольного размера соответствующего стержня 420 датчика, показанного жирными пунктирными линиями со стрелками на каждой стороне 410 рамы 408. В противоположность этому, относительно низкое напряжение сдвига может быть по направлениям поперек оси; например, сниженное на -40 дБ относительно основного направления восприятия.
В вариантах осуществления сенсорного узла 400 эти результаты могут достигаться благодаря выполнению стержней 420 датчика относительно жесткими по направлению восприятия; то есть, в продольном направлении вдоль плоскости секций 426 поперечной перемычки, показанном стрелками на фиг. 4, и относительно менее жесткими (более гибкими или «мягкими») по направлению поперек оси, нормальному к плоскости секций 426 поперечной перемычки. Точно так же, траверсы 414 на каждой стороне 410 рамы 408 могут быть аналогичным образом выполнены относительно более жесткими по направлению восприятия (в поперечном направлении вдоль плоскости секций 424 плоской перемычки) и относительно менее жесткими и более гибкими по направлению поперек оси, нормальному к плоскости секций 424 плоской перемычки.
Поскольку стержень 420 датчика и траверсные элементы 414 на каждой боковой секции 410 рамы 408 могут быть относительно более жесткими по направлению восприятия, чем по направлениям поперек оси, напряжение сдвига на кристаллическом элементе соответствующего преобразователя 406 может усиливаться или становиться максимальным вдоль основных осей восприятия. Наряду с этим, могут быть снижены наводки от главной оси датчика к другим независимым осям. Таким образом, чувствительность конструкции датчика 400 повышена за счет усиления действия характеристик ориентации кристаллов отдельных преобразователей 406 для получения относительно более высокого электрического напряжения при воздействии по предпочтительному направлению восприятия и для снижения эффектов вне оси, чтобы получать заданный уровень точности вектора.
Более конкретно, датчик 400 выполнен с возможностью создания состоятельного представления перемещения или импульса вдоль каждой независимой оси измерения независимо от ориентации датчика. Кроме того, датчик 400 выполнен с возможностью значительного снижения отклика на импульс вдоль одной конкретной оси датчика, наблюдаемого по другим двум независимым (ортогональным) осям. Этим повышается точность вектора за счет получения более точного представления фактического (физического) векторного волнового поля, наблюдаемого на датчике 400, при уменьшении нефизических эффектов в отклике датчика.
В зависимости от применения датчик, конструктивно оформленный в соответствии с фиг. 4, может быть выполнен с чувствительностью и динамическим диапазоном, выбранными исходя из значения ускорения около±335 мg (±3,283 м/с2) при максимальном сигнале (вступления прямой волны) океанической донной кабельной сети и минимальном сигнале океанической донной кабельной сети около 20 нг2/

В конкретных примерах подходящие линейные размеры кристалла пьезоэлектрического датчика ускорения могут быть порядка около 3,5 мм × 2 мм × 1 мм. Соответствующие механические параметры могут включать в себя, но без ограничения ими, среднее напряжение сдвига, основанное на удвоенной площади сдвига, приблизительно 16 МПа (2500 фунт-сила/дюйм2) при использовании среднего значения растяжения 50 фунт-сила (около 220 Н). Подходящее тело массы может быть выполнено в виде алюминиевой сферы, описанной выше, с диаметром, например, порядка около 2,35 см (0,925 дюйма) и массой порядка около 18,3 г. Соответствующие компоненты рамы или боковых панелей могут быть выполнены в виде (квадратных) алюминиевых держателей или стоечных компонентов толщиной 3,124 см (1,23 дюйма) с алюминиевыми траверсными элементами и стержневыми элементами датчика, имеющими секции перемычки толщиной 0,508 мм (20 милов). Эти значения являются только типичными и изменяются от варианта осуществления к варианту осуществления.
В конкретных примерах для изоляторов 422 могут использоваться стеклянные сферы и другие подходящие материалы. Что касается прочности, то такие конструкции способны выдерживать удар при падении с высоты 30,5 см (12 дюймов) на твердую поверхность, приводящий к повышающемуся до приблизительно 784 g ускорению в течение полупериода синусоидального волнового импульса при длительности импульса 0,5 мс. В этом заключается резкое отличие от конструкций из предшествующего уровня техники, которые обычно могут повреждаться в результате значительно более слабых создаваемых ударов.
Соответствующие процедуры испытаний включают в себя перемещение сенсорного устройство 400 по вертикали с ускорением 300 мg (2,94 м/с2) вдоль оси Z (или вдоль любой другой выбранной оси) при дискретном распределении частот. При таких испытаниях соответствующие граничные условия ускорения могут быть установлены или определены на изоляторах 422 или же наложены на углы сенсорного устройства 400, показанного на фиг. 4. Результирующее напряжение на кристаллах 422 преобразователей, наведенное этим перемещением, нанесено на график на фиг. 5.
На фиг. 5 представлен график 500 напряжения сдвига в зависимости от частоты для типичной конструкции 400 сейсмического датчика из фиг. 4. Показаны релевантные напряжения сдвига на кристаллах для трех основных осей X, Y и Z (кривые 502, 504 и 506, соответственно).
Например, для пары кристаллов, определяемых как акселерометр по оси X, показано τxy (кривая 504), поскольку оно представляет собой напряжение сдвига, которое создает заметное электрическое напряжение и может быть ориентировано так, что будет соответствовать ускорениям по оси Y. Напряжения сдвига на преобразователе по оси X (кривая 502) и преобразователе по оси Z (кривая 506) также показаны на графике для каждой частоты. Опорная точка на каждой частоте представляет собой максимальное напряжение на любой из соответствующих граней кристалла, находящихся в контакте с центральной массой. Имеются два кристалла по каждой оси и одна контактная грань на каждый кристалл (то есть, в случае, когда преобразователь прикреплен к внешней поверхности массы).
Две особенности показаны на графике 500 напряжения сдвига. Первая заключается в том, что характеристики кристалла являются по существу плоскими в зависимости от частоты. Это происходит потому, что резонанс датчика находится в значительной степени за пределами частотного диапазона. Вторая заключается в том, что отклик по оси X может быть относительно сильным; например, только приблизительно на 23 дБ слабее, чем по оси Z. Кроме того, следует отметить, что при ускорениях по направлению оси Z (вибрациях по оси Z) ось Y является осью, по которой один стержень датчика при контакте с кристаллом преобразователя находится в самом мягком или наименее жестком соединении, что, вероятно, приводит к большему напряжению на кристалле по оси Y. В противоположность этому, пара траверс рамы по оси Y может быть относительно более жесткой в ответ на перемещение вдоль оси Z. Характеристику этой конструкции можно улучшить уменьшением толщины стержня до приблизительно 0,254 мм (до 0,01 дюйма), но более толстые конструкции также могут иметь преимущества, например, при учете особенностей изготовления.
В соответствии с тем, что напряжение сдвига кристаллов преобразователей является по существу постоянным в зависимости от частоты и что кристаллы преобразователей действуют как пружины между массой и рамами, относительное перемещение между массой и изоляторами (с учетом контролируемых или граничных условий для приложенного ускорения) также является по существу постоянным в зависимости от частоты. В конкретных примерах амплитуда соответствующего относительного перемещения составляет около 7,33 нм. Общее относительное перемещение относительно изоляторов (или других опорных точек) можно найти в соответствии с A/(2πf)2, где f - частота и А - ускорение (например, 300 мg (2,94 м/с2)).
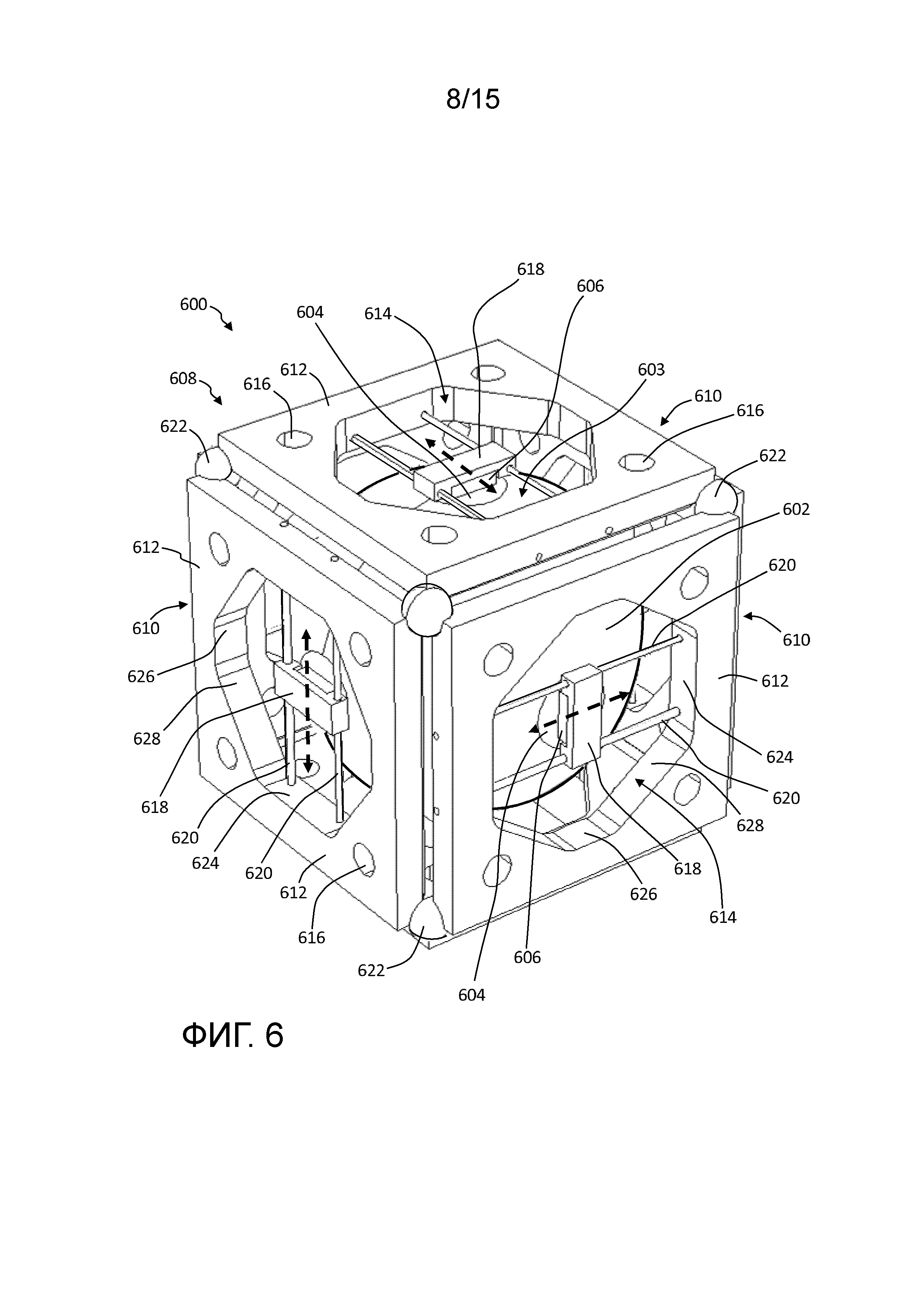
На фиг. 6 представлен изометрический вид альтернативного многокомпонентного сейсмического акселерометрического сенсорного устройства 600 с одной массой. Датчик 600 может быть выполнен несколько иначе, чем датчик согласно варианту осуществления из фиг. 4, и может обладать дополнительными конструктивными и технологическими преимуществами. В других отношениях акселерометр 600 из фиг. 6 может быть подобен акселерометру из фиг. 4.
Как показано на фиг. 6, датчик 600 образован с центральной тестовой массой или телом 602, заключенным в корпус или раму 608. Центральная масса 602 может быть сферической (либо сплошной, либо полой) или сконфигурированной в соответствии с другими вариантами осуществления. Шесть плоских или снабженных выемками поверхностей 604 могут быть образованы на внешней поверхности 603 массы 602, например, совмещенные с противоположными концами трех ортогональных осей, имеющих начало в центре массы 602.
Поверхности 604 образуют соединительные и выравнивающие структуры для прикрепления каждого элемента датчика или преобразователя 606. В некоторых вариантах осуществления неглубокая прямоугольная полость или выемка может быть образована в каждой из поверхностей 604 для соответствующего выравнивания преобразователей 606 и содействия соединению преобразователей 606 с внешней поверхностью 603 массы 602.
Рама 608 может быть образована соединением шести плоских пластинчатых секций или боковых пластинчатых элементов 612, выполненных с возможностью образования в основном кубического ограждения вокруг массы 602. Например, каждая из пластин 612 может образовывать боковой компонент или секцию 610 рамы, при этом все секции имеют аналогичные или по существу идентичные размеры, толщины и конструкции. Отдельные пластины 612 могут быть вырезаны из алюминия или керамики или образованы из других материалов с подходящими сроком службы и жесткостью.
Центральный проем 614 может быть образован в каждой из пластин 612, например, по существу центрально расположенный на каждой стороне 610 рамы 608. Кроме того, как показано на фиг. 6, несколько просверленных отверстий 616 могут быть образованы в пластинах 612, например, в углах секции 610 рамы, отстоящих от центрального проема 614. Как и в варианте осуществления из фиг. 4, в углах отдельные секции 610 рамы могут быть соединены изоляторами 622 для обеспечения электрической изоляции и уменьшения силовой связи между соседними секциями 610 рамы.
В примере варианта осуществления сенсорного устройства 600, показанного на фиг. 6, центральный проем 614 может быть восьмиугольным по форме и ограничен наборами параллельных и противоположных внутренних стенок 624, 626 и 628, при этом, например, стенки 624 по существу нормальны к стенкам 626, а стенки 628 расположены по диагонали между стенками 624 и 626, и стенки могут иметь приблизительно одинаковые или различные длины. В ином случае проем 614 может иметь круговую, треугольную, продолговатую, квадратную, шестиугольную или другую геометрию и соответственно может изменяться конфигурация внутренних стенок.
В противоположность конфигурации стержня датчика, показанного в варианте осуществления на фиг. 4, один, два или большее количество прутковых элементов 620 могут использоваться для присоединения каждого из преобразователей 606 к боковой секции 610 рамы. Каждый преобразователь 606 может удерживаться в держателе или опорной структуре 618, которая поддерживается в центральном проеме 614 прутками 620.
Прутковые элементы 620 прикреплены к противоположным внутренним стенкам 624 центрального проема 614 и продолжаются между ними. Прутки 620 могут быть расположены в основном параллельно и на расстоянии друг от друга и могут проходить через боковые концы опоры 618 датчика. В типичных реализациях прутки 620 выполнены из бериллиевой меди и имеют, например, круговое поперечное сечение и диаметр около 0,508 мм (0,02 дюйма). Бериллиевая медь и другие подходящие материалы придают прутковым элементам 620 высокий предел текучести и высокую удельную электрическую проводимость, а круговое поперечное сечение приводит к по существу одинаковой характеристике напряжения сдвига по обоим поперечным направлениям, перпендикулярным к основной оси поступательного сдвига, ориентированной вдоль продольного направления (показанного пунктирными линиями с двумя стрелками). В ином случае материалы и геометрия поперечного сечения могут изменяться в зависимости от применения.
В показанных вариантах осуществления держатели или опоры 618 могут быть выполнены из латуни или другого подходящего металлического материала и приспособлены для крепления к пруткам 620 на продольных сторонах пьезоэлектрических преобразователей 606. Рама 608 может быть согласована по размерам с прутками 620, расположенными вблизи внутренних поверхностей каждой секции 610 рамы, с тем, чтобы уменьшить моменты «отслаивания». Например, сдвигающая сила на кристаллическом преобразователе 606, поперечная относительно основной оси поступательного сдвига (показанной пунктирными линиями с двумя стрелками), может создавать составляющую напряжения, которая может влиять на отслаивание или же отделение преобразователя 606 от массы 602 и создавать силу, достаточную для разрушения клеевого соединения или другого механического соединения, которое удерживает преобразователь 606 на внешней поверхности 603 массы 602. Как правило, чем ближе прутки 620 находятся к массе 602, тем меньше соответствующий момент, и этот потенциальный эффект ослабляется.
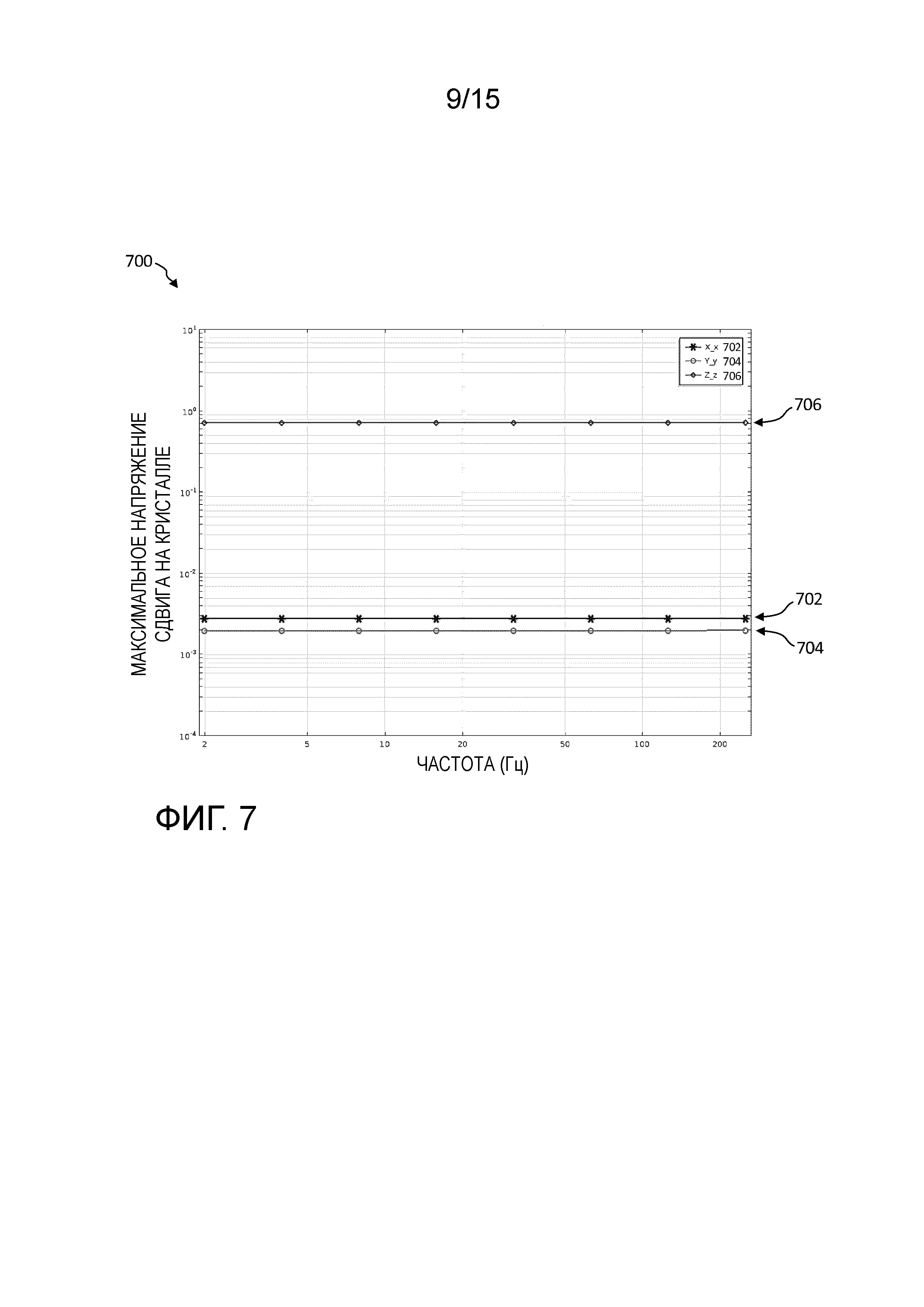
При работе, подобной описанной выше с обращением к фиг. 5, сенсорное устройство 600 из фиг. 6 может перемещаться по вертикали (например, вдоль оси Z) с ускорением около 300 мg (2,94 м/с2) при дискретном распределении частот. При таком испытании соответствующее граничное условие для вертикального ускорения может быть наложено на изоляторы 622, для которых задают значение и фазу ускорения. Напряжение на кристаллах 620 преобразователей, наведенное этим перемещением, показано на графике на фиг. 7.
На фиг. 7 представлен график 700 напряжения сдвига в зависимости от частоты для альтернативного сейсмического датчика 600 из фиг. 6. Показаны соответствующие напряжения сдвига на кристаллах для трех основных осей X, Y и Z датчика (кривые 702, 704 и 706, соответственно).
Для пары кристаллов, определенной как акселерометр по оси Y, на график нанесено τxy (кривая 704), поскольку оно является напряжением сдвига, которое создает заметное электрическое напряжение и может быть ориентировано так, что будет соответствовать ускорениям по оси Y. Соответствующие напряжения сдвига на преобразователях по оси X (кривая 702) и преобразователях по оси Z (кривая 706) также показаны для каждой частоты. Опорная точка на каждой частоте является максимальным напряжением на любой из граней кристалла, находящейся в контакте с центральной массой. И в этом случае имеются два кристалла на одну ось и одна поверхность контакта на один кристалл, при этом преобразователь прикреплен к внешней поверхности массы.
Характеристики кристаллов остаются по существу плоскими в зависимости от частоты, вследствие чего резонанс датчика в значительной степени находится вне полосы. Однако в противоположность варианту осуществления из фиг. 5, характеристики по поперечным осям (для пар преобразователей по оси X и оси Y) являются более похожими и обе более чем на 40 дБ ниже характеристики по оси возбуждения (для пары преобразователей по оси Z). Этой конструкцией также удовлетворяются требования к точности вектора в случае, если отклик на резкое вступление сейсмической волны вдоль конкретной оси измеряется согласованно и точно, а отклик вне оси значительно слабее, чем отклик по направлению оси.
В соответствии с тем, что напряжение сдвига кристаллов преобразователя является по существу постоянным в зависимости от частоты и что кристаллы преобразователя действуют как пружины или подобные подпружиненные соединения между массой и рамами, относительное перемещение массы и верхней рамы (рассматриваемое как регулирование) также является по существу постоянным в зависимости от частоты. В этих конкретных примерах амплитуда относительного перемещения составляет около 0,91 нм. Общее относительное перемещение датчиков может быть найдено в соответствии с A/(2πf)2, где f - частота и А - ускорение (например, 300 мg (2,94 м/с2)).
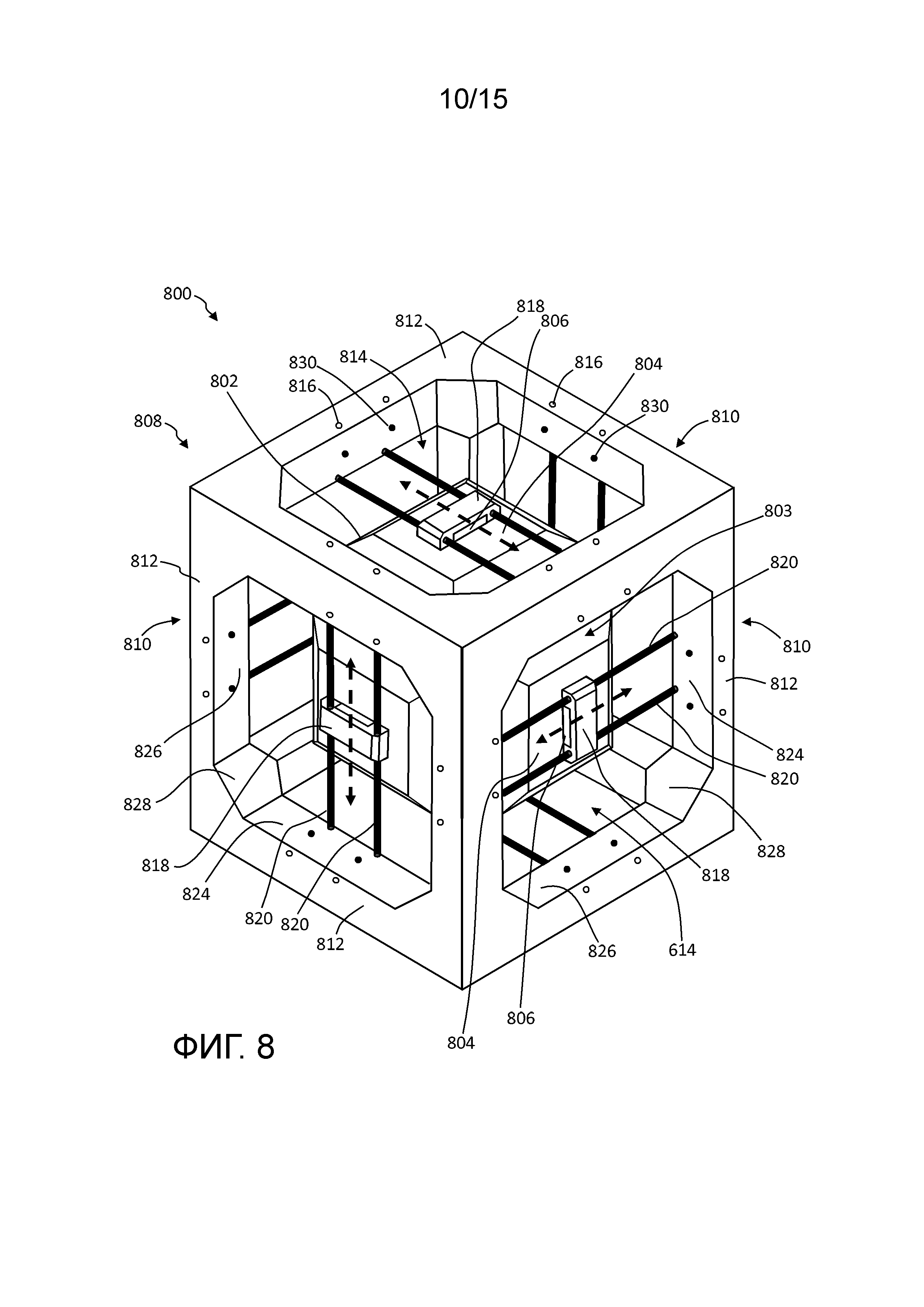
На фиг. 8 представлен изометрический вид еще одного альтернативного многокомпонентного сейсмического сенсорного устройства 800 с одной массой. Как показано на фиг. 8, сенсорное устройство или акселерометр 800 в некоторых отношениях может подобен датчику 400 из фиг. 4 и датчику 600 из фиг. 6. Корпус или рама 808 сенсорного устройства 800 также может быть изготовлена из цельной механически обрабатываемой керамики, металла или другого подходящего материала, обеспечивающего дополнительную ортогональность и жесткость.
Центральная тестовая масса или тело 802 заключено внутри корпуса или рамы 808. Центральная масса 802 может быть сферической (либо сплошной, либо полой) или образована в виде симметричного многогранника или в другой конфигурации (например, с шестью плоскими соединительными поверхностями 804, образованными на внешней поверхности 803 массы 802, совмещенными с противоположными концами трех ортогональных осей, имеющих начало в центре массы 802). Как описывалось выше, соединительные поверхности 804 образуют связующие и выравнивающие поверхности для прикрепления элементов датчика или преобразователей 806. В некоторых вариантах осуществления неглубокая полость или выемка может быть образована в каждой из поверхностей 804 для размещения и выравнивания отдельных пьезоэлектрических преобразователей 806 и для содействия присоединению преобразователей 806 к внешней поверхности 803 массы 802.
Как показано на фиг. 8, рама 808 может включать в себя шесть плоских поверхностей или сторон 810, образующих куб вокруг массы 802. Такая рама 808 может быть образована как моноблок или подобный структурный оболочечный компонент, полученный из керамики механической обработкой (например, из материала MACOR) или из другого подходящего материала или другого материала с подходящими жесткостью и другими механическими свойствами.
Центральный проем 814 может быть образован в каждой из боковых поверхностей 810 рамы 808, окруженный множеством боковых стоек или поперечин 812, образующих периметрическую структуру кубической рамы 808. В симметричных вариантах осуществления боковые элементы 812 могут быть выполнены подобными или по существу идентичными по размеру, толщине и конструкции.
Как показано на фиг. 8, центральные проемы 814 могут быть в основном квадратными или восьмиугольными по форме и ограниченными двумя парами параллельных и обычно противоположных внутренних стенок 824 и 826. Стенки 824 и 826 могут быть одинаковой длины, при этом чередующиеся пары стенок 824 и 826 ориентированы в основном перпендикулярно друг к другу. Остальные внутренние стенки 828 обычно могут быть короче, чем другие внутренние стенки 824, 826, и ориентированы диагонально относительно них и относительно боковых периметрических компонентов 812 вдоль сторон 810 рамы 808. Кроме того, диагональные стенки 828 могут быть наклонены внутрь к массе 802 и могут плавно переходить в боковые элементы 812, которые продолжаются вдоль каждой стороны 810 рамы 808. Кроме того, центральные проемы 814 могут быть достаточно большими, приспособленными для вставления массы 802 в раму 808 и закрепления в ней.
Как показано на фиг. 8, аналогично варианту осуществления из фиг. 6, пара цилиндрических прутков 820 может использоваться для соединения каждого из преобразователей 806 с рамой 808 сенсорного устройства 800. В конкретных конфигурациях каждый преобразователь 806 может удерживаться в держателе или опоре 818, которая также удерживается в центральном проеме 814 прутками 820, которые прикреплены к паре противоположных внутренних стенок 824 и продолжаются между ними. В типичной конфигурации концы прутков 820 могут быть введены в отверстия 816, просверленные в боковой стойке или поперечинах 812 боковых поверхностей 810, и закреплены в них, например, клеем. Пары прутков 820 могут располагаться параллельно и на расстоянии друг от друга, продолжаясь через боковые концы соответствующего держателя 818. В типичных реализациях прутки 820 могут быть выполнены из бериллиевой меди, при этом они могут иметь диаметр 0,508 мм (0,02 дюйма) и круговое поперечное сечение. В ином случае в размеры и состав материалов могут вноситься изменения.
В показанных вариантах осуществления опоры 818 могут быть выполнены из латуни или другого подходящего металлического материала и приспособлены к скреплению с прутками 820 на сторонах пьезоэлектрических преобразователей 806. Раме 808 могут быть приданы соответствующие размеры, а прутки 820 могут быть расположены вблизи внутренней поверхности каждой стороны 810 рамы 808 для снижения моментов отслаивания, описанных выше. В дополнение к этому каналы 830 могут быть просверлены или иным образом образованы в боковых компонентах 812, например, от внутреннего края стоечных элементов, поперек просверленных отверстий 816, в которых размещены прутки 820 и с которыми каналы 830 находятся в сообщении по жидкой среде для нагнетания клея (например, электропроводной эпоксидной смолы или другого связующего агента), чтобы прутки 820 удерживались на месте.
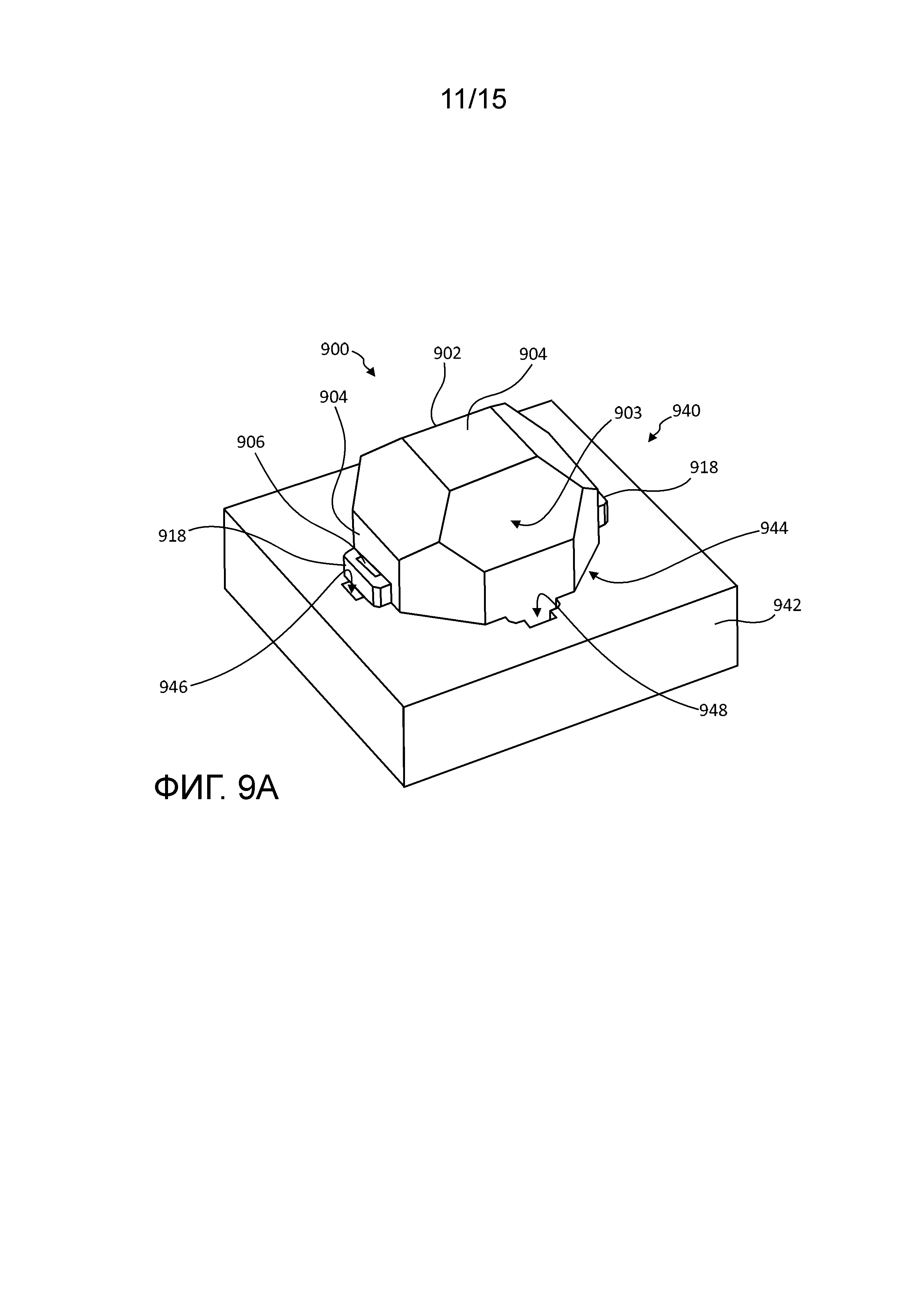
На фиг. 9А представлен изометрический вид выравнивающего инструментального средства или сборочного приспособления 940, предназначенного для изготовления сейсмического датчика 900 с одной массой, с центральной тестовой массой или телом 902. На фиг. 9А показано инструментальное средство или сборочное приспособление 940, приспособленное для выравнивания элементов датчика или преобразователей 906 и опорных держателей 918 относительно центральной массы 902.
Масса 902 может быть вставлена в основное отверстие 944, образованное в основании 942 выравнивающего инструментального средства 940, которому приданы размеры и конфигурация, обеспечивающие прием массы 902 конкретной конфигурации или формы, в соответствии с которой масса 902 изготовлена механической обработкой или иным образом, и удержание массы 902 в конкретной ориентации. Несколько пазов 946, 948 и т.д. могут быть образованы в основании 942, прилегающих к основному отверстию 944 и выровненных относительно поперечных осей массы 902, прилегающих к соответствующим поверхностям 903 крепления. Пазам 946, 948 могут приданы размеры и конфигурация, обеспечивающие прием преобразователя 906 в сочетании с соответствующим держателем или опорой 918 в соответствующей ориентации для выравнивания кристаллов преобразователей 906 вдоль заданной оси сдвига.
Поэтому кристаллы преобразователей 906 могут быть прикреплены к массе 902 с заданным совмещением и могут удерживаться на месте в течение продолжительного периода нанесения отвердителей клея. Тем самым многочисленные пьезоэлектрические преобразователи или другие элементы 906 датчика могут быть одновременно присоединены.
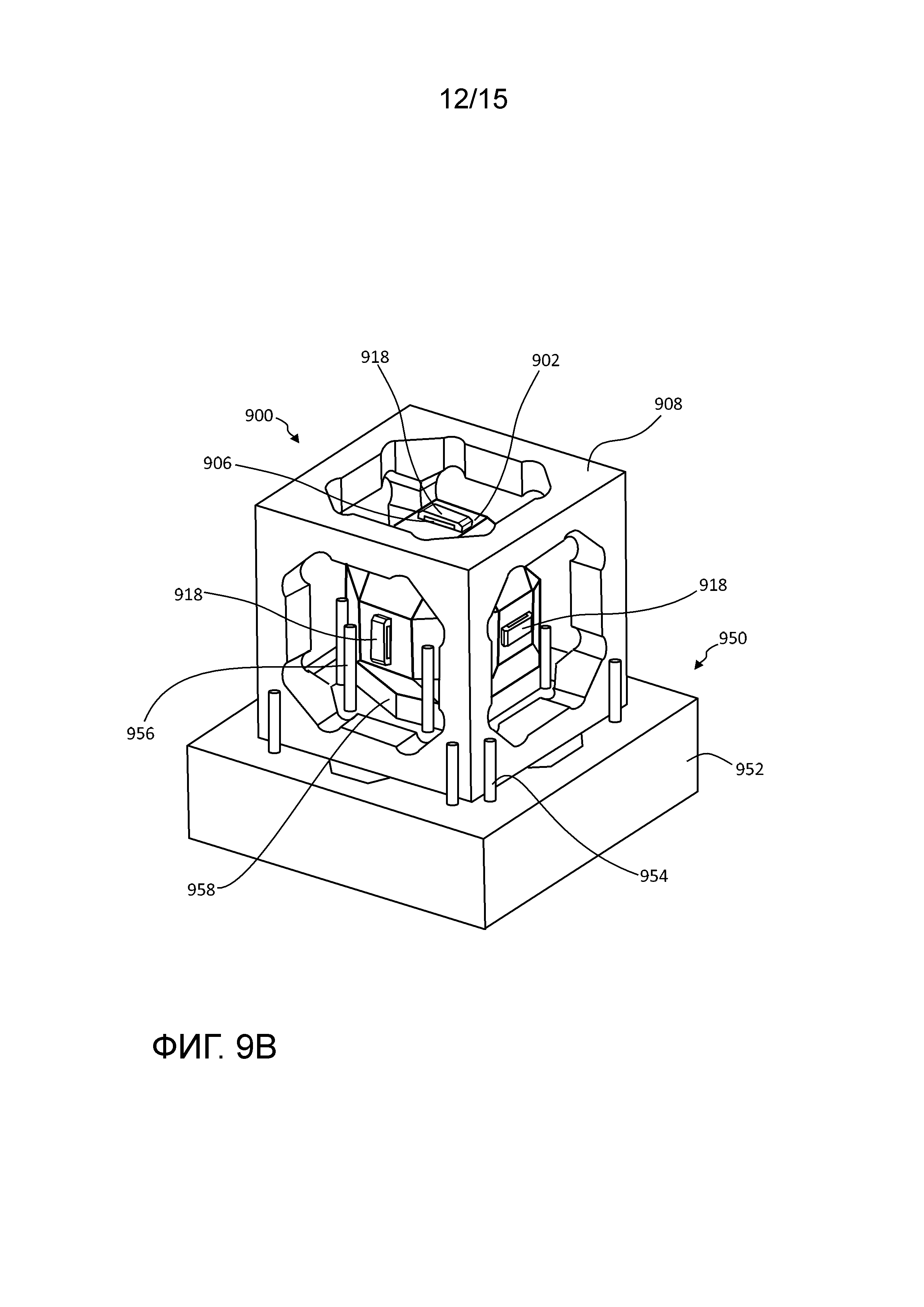
На фиг. 9В представлен изометрический вид сборочного приспособления 950 для многокомпонентного акселерометра с одной массой или сейсмического сенсорного устройства 900. Второй этап процесса изготовления может быть осуществлен на сборочном приспособлении или инструментальном средстве 950, показанном на фиг. 9В.
Масса 902 с преобразователями 906 и опорами 918, ранее присоединенными к ней, может временно удерживаться на месте на основании 952 инструментального средства 950. Несколько вертикальных столбиков 954 могут быть помещены с возможностью удаления в отверстия в основании 952 сборочного инструментального средства 950 для удержания массы 902 на месте. Центральный участок 958 основания 952 может быть соответствующим образом приподнят для подъема массы 902 выше поверхности и для нахождения массы 902 в заданном положении, когда корпус или рама 908 помещена поверх массы 902 с опорой на основание 952.
Кроме того, рама 908 может удерживаться на месте набором дополнительных вертикальных столбиков 956, которые могут быть с возможностью удаления помещены в дополнительные отверстия в основании 952 для удержания рамы 908 на месте относительно массы 902. В то время как масса 902 и рама 908 удерживаются на месте относительно друг друга в сборочном инструментальном средстве 950, прутки могут быть введены через отверстия в стойках рамы 908 с первой стороны, через отверстия в опорах 918 и далее через отверстия в противоположных стойках, образующих поверхность рамы 808, как это показано, например, на фиг. 6 и фиг. 8. После этого клей может быть введен по клеевым каналам и отвержден для прикрепления стержней к раме 908 и опорам 918. Таким образом, в сборочном инструментальном средстве 950 обеспечивается одновременное выполнение операций отверждения по всем осям для присоединения прутков, в результате чего минимизируется и нормализируется любое напряжение, которое может прилагаться к пруткам и преобразователям во время процесса сборки.
ОТКЛИК ДАТЧИКА
На фиг. 10 представлено схематичное изображение, иллюстрирующее внешний стимул, прикладывающий силу к сенсорному устройству 1000. Как показано на фиг. 10, линейным внешним стимулом 1001 прикладывается сила к держателям или опорам 1018 через корпус или раму датчика. Держатели или опоры 1018 механически соединены с отдельными элементами 1006 датчика, например, с пьезоэлектрическими преобразователями.
Инерционное сопротивление тестовой массы 1002 противодействует внешней силе или стимулу 1001, а напряжение сдвига создается на каждой паре преобразователей 1006, расположенных для реагирования на внешнюю силу 1001. Когда отклик кристалла (выходное напряжение пьезоэлектрического кристалла) является суммарным для преобразователей 1006 на каждой стороне массы 1002, выбранные правила ориентации и полярности кристаллов приводят к сигналу, пропорциональному амплитуде ускорения, обусловленному внешним стимулом, прикладываемым вдоль выбранной оси восприятия. Смещенные относительно оси датчики имеют минимальный отклик благодаря механической конструкции сенсорного устройства 1000, обеспечивающей требуемую податливость внутри держателя кристалла относительно рамы, описанной в этой заявке.
Как показано на фиг. 10 каждый преобразователь 1006 заключен между тестовой массой или телом 1002 (показанным эллиптическим ради удобства) и прилегающим держателем или опорным элементом 1018. Метка 1034 механического позитивного действия (или положительного отклика) показана для каждого из двух преобразователей 1006, и они могут быть выровнены относительно одного и того же конца каждого кристалла. Кроме того, преобразователи 1006 могут устанавливаться на массу 1002 вместе с отрицательными или общими электродами, помещаемыми на внешнюю поверхность массы 1002 и/или в электрический контакт с внешней поверхностью, и вместе с положительными электродами, ориентированными по отношению к опорным держателям 1018 и/или помещаемыми в электрический контакт с ними.
В некоторых примерах масса 1002 может содержать электропроводный металл или включать в себя покрытую металлом поверхность, задающую эквипотенциальную поверхность, которая электрически соединена с общими (отрицательными) электродами каждого преобразователя 1006 в датчике 1000 и которая, как показано на фиг. 10, может быть электрически соединена с общей линией заземления. Типичная электрическая схема 1050 представляет собой эквивалентную схему, на которой показаны электрическая полярность преобразователей 1006 и заземляющее соединение. Однако правила полярностей и механического позитивного действия являются только типичными и без потери общности могут быть изменены для любого или всех преобразователей 1006.
Когда в случае линейного датчика 1000 ускорения акустическая плоская волна или другой подходящий внешний импульс 1001 проходит вдоль обозначенной положительной оси восприятия, датчик 1000 образует положительный сигнал в ответ на результирующее напряжение сдвига, действующее на преобразователи 1006. Напряжение сдвига, наводимое инерционным сопротивлением массы 1002, которая прикреплена к одной поверхности каждого преобразователя 1006, в связи с внешним стимулом 1001, передается на опорные держатели 1018, которые прикреплены к противоположным поверхностям преобразователей 1006. Тело массы 1002 и опорные держатели 1018 работают на сжатие и растяжение противоположных поверхностей преобразователя 1006, создавая напряжение сдвига.
Когда акустические волны распространяются в направлении, противоположном направлению положительной оси восприятия датчика, создается отрицательный выходной сигнал. Поэтому направлением распространения волны определяется полярность сигнала по каждой оси линейного датчика. По действием линейного механического стимула кристаллы подвергаются воздействию сил сдвига и создают сигнал одноименной полярности. Из эквивалентной схемы 1050 на фиг. 10 видно, что в этой конкретной конфигурации электрический отклик VR равен сумме выходных напряжений XTAL1 и XTAL2 двух кристаллов 1006 преобразователя.
ОТКЛИК НА ПОВОРОТ
Три оси X, Y, Z линейного датчика могут быть расположены ортогонально, например, с положительной ориентацией полярности оси, каждая из которых удовлетворяет правилу правой руки (см. фиг. 2). В случае датчика ускорения вращения перемещение, действующее на связанную пару пьезоэлектрических преобразователей 1006, будет иметь положительную полярность, определяемую в направлении по часовой стрелке вокруг общей оси, наблюдаемую в плоскости перемещения и вдоль положительной оси, нормальной к плоскости. Иначе говоря, при рассмотрении вниз от положительного конца оси, нормальной к плоскости вращения, перемещение, действующее на связанную пару датчиков, будет иметь положительную полярность и происходить в направлении против часовой стрелки вокруг оси. Без потери общности в ином случае правило знаков может быть изменено на обратное.
На фиг. 11А представлено схематичное изображение, иллюстрирующее ориентацию и трансляционный отклик датчика 1100 с набором преобразователей 1106, прикрепленных к опорным держателям 1118, расположенных в плоскости X-Z вокруг тестовой массы 1102. На фиг. 11В и 11С представлены схематичные изображения, иллюстрирующие ориентацию и трансляционный отклик преобразователей 1106, расположенных в плоскостях X-Y и Y-Z, соответственно. На фиг. 11D представлено схематичное изображение, иллюстрирующее отклик и правило полярностей электродов для типичного преобразователя 1106.
На фиг. 11А показаны ориентация первой пары преобразователей 1106, расположенных вокруг массы 1102 в плоскости Z-X, и направление положительного трансляционного отклика на внешнюю силу. Подключение электродов и соответствующая полярность выходного напряжения показаны с помощью соответствующих меток (точек) напряжения и электродов при использовании положительного отклика и правила маркировки электродов из фиг. 11D.
На фиг. 11В и 11С использовано то же самое правило маркировки. На фиг. 11В показана ориентация второй пары преобразователей 1006, расположенных вокруг массы 1102 в плоскости X-Y, и на фиг. 11С показана ориентация третьей пары преобразователей 1106, расположенных вокруг массы 1102 в плоскости Y-Z.
На фиг. 12 представлена схема соединений набора пьезоэлектрических преобразователей или сенсорных элементов 1206 в многокомпонентном сейсмическом сенсорном устройстве 1200 с одной массой. На фиг. 12 представлена упрощенная схема соединений плат 1210 предварительных усилителей и каналов X1-X6 для преобразователей 1206 согласно различным вариантам осуществления многокомпонентного датчика 1200 ускорения с одной массой. В некоторых вариантах осуществления встроенный предварительный усилитель/цифровой преобразователь может быть помещен после буферного предварительного усилителя. В дополнительных вариантах осуществления после представления в цифровую форму процессор для регулирования усиления и удаления смещения может использоваться до формирования конечных линейных и представляющих вращательное перемещение выходных сигналов, например, путем цифрового суммирования и вычисления разностей.
В некоторых конфигурациях многокомпонентный датчик 1200 ускорения с одной массой может иметь шесть откликов датчика на перемещение: три отклика на ортогональные линейные ускорения и три отклика на ускорения вращения. Отклики на линейные ускорения и ускорения вращения по каждой оси (обозначенные Xl, Xr; Yl, Yr; и Zl, Zr, соответственно) образуются на основании сигналов суммы и разности, получаемых с помощью соответствующих пар изгибных монокристаллических преобразователей 1206, показанных на фиг. 12. Каждая из трех пар преобразователей 1206 может быть расположена вдоль отдельной одной из трех ортогональных осей X, Y, Z восприятия, которые продолжаются через центр массы (одного) тестового тела, описанного выше.
После буферизации и преобразования в цифровую форму отклики противоположных пар отдельных преобразователей 1206 могут быть просуммированы или вычтены для образования откликов на линейное ускорение и ускорение вращения. Правилом знаков определяется, какие выходные сигналы, линейные или вращения, будут получены суммированием или вычислением разностей пар сигналов противоположных кристаллов. В конкретной конструкции линейный сигнал отклика может быть образован суммированием откликов противоположных кристаллов, например, в соответствии с определением механической ориентации каждого кристалла, показанной выше на фиг. 11А-11С. Как следствие этого, разность откликов противоположных кристаллов можно использовать для образования отклика на ускорение вращения. Однако правило знаков является произвольным и может быть изменено на обратное без потери общности.
ОБРАЗОВАНИЕ СИГНАЛОВ
В этом разделе определены отдельные формулы и алгоритмы для вычисления и образования простых типичных линейных выходных сигналов и выходных сигналов вращения в случае типичного многокомпонентного датчика ускорения с одной массой. Эти относительно простые примеры не обязательно включают в себя все корректировки ориентации в трех измерениях, поскольку, они могут быть получены, например, в результате выполнения формальной калибровки, но такие корректировки предполагаются в объеме раскрытия.
В математических выражениях первого порядка, приведенных ниже, буферизованные сигналы преобразователей обозначены v1-v6. Корректировки смещения обозначены o1-o6 и корректировки усиления обозначены А1-А6. Конкретные значения корректировок усиления, представленные в этой заявке, являются только типичными и изменяются от варианта осуществления к варианту осуществления. В частности, эти конкретные значения пригодны только для обозначения диапазона изменчивости сигналов линейного и вращательного перемещения в конкретных конфигурациях многокомпонентного сейсмического датчика с одной массой. В более общем смысле, эти значения изменяются в зависимости от отклика преобразователя, конфигурации электроники и других факторов.
Таблица 1. Линейный отклик



Таблица 2. Отклик на поворот



Таблица 3. Параметры
Таблица 4. Типичные корректировки коэффициента усиления
ПРИМЕРЫ
В системе регистрации сейсмических данных можно использовать сенсорную станцию с одним или несколькими сейсмическими датчиками, при этом сейсмические датчики включают в себя любое количество, отдельно и в сочетании, гидрофонов, геофонов, акселерометров и т.п. Такая система может включать в себя многокомпонентный акселерометр с одной массой, например, реализованный как шестикомпонентный сейсмический датчик, выполненный с возможностью измерения с тремя степенями свободы линейного перемещения по трем независимым направлениям и с тремя степенями свободы при повороте вокруг трех независимых осей. В некоторых из этих вариантов осуществления датчик снабжен тремя парами акселерометров или подобных пьезоэлектрических датчиков, соединенных с одной тестовой массой и расположенных вдоль трех независимых или ортогональных осей.
Резонанс такого многокомпонентного акселерометра с одной массой может быть по величине на один или несколько порядков выше, чем других датчиков (например, типичного датчика ускорения частиц), что обеспечивает недорогую реализацию механической системы ударного воздействия с высокочастотной границей пропускания при сохранении плоской характеристики в выбранном, представляющем интерес сейсмическом частотном диапазоне. Акселерометр может обладать направленным восприятием при конфигурировании кристаллов и стержней в однозначных ориентациях и/или прикреплении к кристаллам опор, которые являются «жесткими» вдоль главной оси восприятия и «мягкими» вдоль поперечных осей. Одна задача, которая может быть решена при такой конфигурации, заключается в снижении или минимизации искажения в раме при усилении или максимизации напряжения сдвига на кристалле по основному направлению восприятия.
В любом из примеров и вариантов осуществления, описанных в этой заявке, сейсмический датчик может содержать раму и центральную массу, расположенную внутри рамы, при этом центральная масса имеет три главные оси. Множество преобразователей могут находиться в механическом соединении между рамой и центральной массой. Преобразователи могут быть размещены тремя парами, при этом преобразователи в каждой паре соединены с противоположными сторонами центральной массы, находящимися вдоль трех различных главных осей.
Каждый из преобразователей может иметь ориентацию кристаллов, определяющую чувствительность к сдвигу, при этом чувствительности к сдвигу преобразователей в каждой паре ориентированы в основном параллельно друг к другу и по существу перпендикулярны к соответствующей главной оси. Например, чувствительности к сдвигу трех пар преобразователей могут быть ориентированы по взаимно перпендикулярным направлениям. Взаимно перпендикулярные направления могут соответствовать главным осям, но чувствительность к сдвигу каждой пары перпендикулярна к главной оси, вдоль которой эта пара расположена, и поэтому параллельна другой из трех главных осей, вдоль которой расположена другая пара преобразователей.
Рама или корпус может содержать множество боковых элементов рамы, расположенных парами на противоположных сторонах центральной массы, находящихся вдоль трех главных осей, при этом преобразователи в каждой соответствующей паре соединены с боковыми элементами рамы. Множество изолирующих элементов могут быть расположены между боковыми элементами рамы в ее углах, при этом изолирующие элементы выполнены с возможностью уменьшения передачи сдвиговой нагрузки между соответствующими боковыми элементами рамы.
Стержень может быть расположен вдоль центрального участка каждого бокового элемента рамы, при этом стержень выполнен с возможностью соединения с соответствующим преобразователем напротив центральной массы. Такой стержень может иметь неравномерное поперечное сечение, определяющее более высокую жесткость вдоль основного направления восприятия соответствующего преобразователя (например, определяемого ориентацией кристалла, при этом чувствительность к сдвигу перпендикулярна к соответствующей главной оси), и относительно меньшую жесткость по направлению, перпендикулярному основному направлению восприятия (например, вдоль соответствующей главной оси).
В ином случае один или несколько прутков могут быть присоединены к каждому боковому элементу рамы и расположены напротив проема, образованного в центральной области бокового элемента рамы. Один или несколько прутков могут быть выполнены с возможностью присоединения соответствующего преобразователя к соответствующей стороне рамы, при этом прутки продолжаются, например, вдоль основного направления восприятия. Кроме того, прутки могут быть выполнены с возможностью снижения передачи сдвиговой нагрузки по направлению, перпендикулярному к основному направлению восприятия.
В любом из этих примеров и вариантов осуществления центральная масса может быть электропроводной или может иметь электропроводную внешнюю поверхность. Каждый из преобразователей может быть электрически соединен с электропроводной внешней поверхностью для образования потенциала общего вывода. Например, каждый из преобразователей может быть ориентирован относительно стороны отрицательного электрода, расположен напротив электропроводной поверхности центральной массы, а все отрицательные электроды могут быть присоединены к электропроводной сфере для образования общего заземления.
Электроника датчика может быть выполнена с возможностью объединения сигналов преобразователей в каждой паре для образования выходного сигнала, характеризующего ускорение рамы по направлению, перпендикулярному к соответствующим главным осям. Аналогично этому, электроника датчика может быть выполнена с возможностью объединения сигналов преобразователей в каждой паре для образования выходного сигнала, характеризующего поворот рамы вокруг соответствующей главной оси. В зависимости от требований к электроду и отклику при выбранной ориентации кристалла преобразователя сигналы могут быть объединены путем суммирования для образования выходного сигнала (линейного) ускорения и объединены путем вычитания для образования выходного сигнала ускорения вращения при использовании соответствующей электроники предварительных усилителей, коэффициентов усиления и других параметров.
Сенсорное устройство согласно любому из рассмотренных выше вариантов осуществления и примеров может содержать модульный корпусной узел, имеющий один или несколько компонентов, выполненный с возможностью развертывания в водяной толще. Сейсмический датчик может быть расположен в модульном корпусе, при этом сейсмический датчик содержит центральную массу, расположенную внутри рамы, и множество преобразователей, механически присоединенных между рамой и центральной массой. Преобразователи могут быть размещены парами и соединены с противоположными сторонами центральной массы, при этом противоположные стороны находятся вдоль трех главных осей центральной массы.
Электроника датчиков может быть выполнена с возможностью образования выходного сигнала путем объединения сигналов преобразователей в каждой паре, при этом выходной сигнал характеризует сейсмическое волновое поле, распространяющееся через водяную толщу. Например, первая (например, аддитивная) комбинация сигналов может быть восприимчивой к ускорению по направлению восприятия, перпендикулярному к главной оси, вдоль которой пара преобразователей присоединена к массе. И наоборот, вторая (например, субтрактивная) комбинация сигналов может быть восприимчивой к повороту вокруг главной оси, вдоль которой пара преобразователей присоединена к массе.
В ином случае правило знаков может быть изменено на обратное, например, на основе ориентации кристалла преобразователя, правила соединения электродов и других компонентов электронной обработки сигналов. Например, каждая пара преобразователей может иметь ориентацию кристаллов, определяющую чувствительность к сдвигу по направлению восприятия, при этом чувствительности к сдвигу отдельных преобразователей в паре ориентированы в основном по параллельным направлениям, а чувствительности к сдвигу других пар преобразователей ориентированы по взаимно перпендикулярным направлениям.
Рама может содержать множество боковых элементов рамы, расположенных на противоположных сторонах центральной массы. Множество изолирующих элементов могут быть расположены между боковыми элементами рамы и выполнены с возможностью снижения передачи сдвиговой нагрузки между сторонами рамы. Кроме того, рама может содержать множество боковых поверхностей, расположенных вокруг центральной массы вдоль главных осей, при этом каждая из боковых поверхностей соединена с соответствующим одним из преобразователей напротив центральной массы. Боковые поверхности (или боковые элементы рамы) могут быть выполнены исходя из относительно более высокой жесткости вдоль направления восприятия соответствующих преобразователей и относительно низкой жесткости по направлению, перпендикулярному к соответствующему направлению восприятия (например, вдоль соответствующих главных осей массы).
Центральная масса может быть образована из электропроводного материала или электропроводная внешняя поверхность может быть образована на центральной массе. Каждый из преобразователей может быть электрически соединен с электропроводной внешней поверхностью для образования потенциала общего вывода.
Устройство синхронизации может быть выполнено с возможностью образования синхронизирующего сигнала, соответствующего выходному сигналу электроники датчика, а запоминающее устройство сконфигурировано для сохранения выходного сигнала и соответствующего синхронизирующего сигнала. В вариантах осуществления сенсорной станции и сейсмического узла устройство синхронизации и запоминающее устройство могут быть расположены в модульном корпусе совместно с сейсмическим датчиком и электроникой датчика. Кроме того, сенсорное устройство может содержать источник питания, выполненный с возможностью снабжения электроэнергией электроники, схемы синхронизации, запоминающего устройства и электроники датчика. Датчик глубины может быть выполнен с возможностью управления источником питания на основании глубины погружения сенсорного устройства в водяной толще. Модульный корпус может быть по существу унитарным или образованным из отдельных модульных компонентов, соединенных друг с другом, при этом сейсмический датчик, электроника датчика, схема синхронизации, запоминающее устройство, источник питания, датчик глубины и другие внутренние компоненты расположены в тех же самых или других компонентах корпуса.
Подходящие способы образования или сборки такого сейсмического датчика или сенсорного устройства включают в себя создание выравнивающего сборочного приспособления и расположение массы на основании выравнивающего сборочного приспособления, при этом массой задаются три ортогональные оси. Множество преобразователей могут быть расположены на сборочном приспособлении с прилеганием к массе, при этом преобразователи размещены парами на противоположных сторонах массы вдоль по меньшей мере двух ортогональных осей. Преобразователи могут быть выровнены при использовании сборочного приспособления, при этом каждая пара преобразователей образует основное направление восприятия, ориентированное перпендикулярно к соответствующей оси. Кроме того, преобразователи могут быть присоединены к массе, при этом на сборочном приспособлении каждый из преобразователей удерживается в выровненном состоянии вдоль соответствующего основного направления восприятия.
В ином случае каждый из этапов может выполняться независимо без выравнивающего сборочного приспособления, например, при использовании других выравнивающих инструментальных средств. В зависимости от конструкции датчика и сборочного приспособления размещение массы на основании выравнивающего сборочного приспособления может включать в себя вставление преобразователей в пазы, образованные вблизи отверстия в основании сборочного приспособления, при этом пазы выполнены с возможностью выравнивания преобразователей для образования соответствующих основных направлений восприятия перпендикулярно к соответствующим ортогональным осям.
Кроме того, на сборочном приспособлении можно расположить раму, при этом стороны рамы выравнивают относительно трех ортогональных осей. Множество преобразователей можно присоединить к раме, при этом преобразователи присоединяют между массой и соответствующими сторонами. Кроме того, выбранные способы сборки могут включать в себя вставление штырей в основание, при этом штыри выполнены с возможностью удержания одной из массы и рамы или обеих в заданных положениях во время операции одновременного отверждения для присоединения множества преобразователей к одной из массы и рамы или к обеим по существу в одно и то же время.
Дополнительные сочетания также являются осуществимыми. Например, сенсорная станция может включать в себя один или несколько датчиков скалярного давления и трехкомпонентный (3К) датчик, выполненный с возможностью измерения трех пространственных составляющих сейсмических волн, например, один или несколько акселерометров на основе микроэлектромеханической системы (МЭМС) или пьезоэлектрических датчиков. Кроме того, в сенсорную станцию можно включать один или несколько дополнительных компонентов, например, устройство или схему синхронизации, выполненную с возможностью образования синхронизирующего сигнала, запоминающее устройство, сконфигурированное для сохранения сейсмических данных с датчиков, источник энергии, выполненный с возможностью снабжения электроэнергией датчиков и других электронных компонентов.
Система может включать в себя один или несколько датчиков глубины или датчиков давления, выполненных с возможностью определения глубины погружения сейсмической сенсорной станции во время развертывания и/или извлечения. Во время развертывания один или несколько датчиков, запоминающее устройство и другие схемы или электронные компоненты сейсмической сенсорной станции могут не снабжаться электроэнергией до тех пор, пока не будет достигнута пороговая глубина погружения, измеряемая, например, датчиками глубины или давления. Кроме того, когда пороговая глубина погружения достигается, одна или несколько схем или электронных компонентов сейсмической сенсорной станции могут быть отключены от электропитания.
Благодаря избирательному снабжению электроэнергией одной или нескольких таких схем или электронных компонентов сейсмической сенсорной станции во время развертывания и/или извлечения, могут осуществляться энергосбережение и увеличение эксплуатационного ресурса сенсорной станции. В частности, эксплуатационный ресурс сейсмических датчиков и/или станции может быть увеличен во время выполнения операций по регистрации сейсмических данных по сравнению с эксплуатационным ресурсом таких систем без возможности избирательного подключения и отключения электроэнергии для одной или нескольких схем или электронных компонентов, будь то на основании глубины погружения, временного режима или другого рабочего параметра.
В некоторых примерах сейсмическая сенсорная станция образована при использовании одного общего корпуса, а все схемы или электронные компоненты сенсорной станции содержатся внутри корпуса. Кроме того, сейсмическая сенсорная станция может быть выполнена с возможностью развертывания на тросе, например, в случае корпуса, имеющего проход, образованный в нем и выполненный с возможностью приема троса, или в случае использования зажима или другого соединительного механизма, выполненного с возможностью содействия присоединения к тросу.
Сейсморазведочная установка может включать в себя две или большее количество сенсорных станций или узлов, описанных в этой заявке. Способ развертывания сенсорных станций в сейсморазведочной установке может быть реализован путем размещения станций вдоль троса или проволочного троса или с помощью дистанционно управляемого аппарата или автономно управляемого аппарата или при использовании автономных движительных систем. Дополнительные способы заключаются в буксировании таких сейсморазведочных установок позади судна.
Способы регистрации сейсмических данных включают в себя действие такой системы регистрации сейсмических данных, описанной в этой заявке. Кроме того, нетранзиторный машиночитаемый носитель данных может быть снабжен программным кодом, включенным в него, при этом программный код является исполняемым компьютерным процессором для осуществления такого способа регистрации сейсмических данных при работе системы регистрации сейсмических данных, описанной в этой заявке.
ОСЛАБЛЕНИЕ И УСИЛЕНИЕ ПОПЕРЕЧНЫХ ВОЛН
Автономная сенсорная система может быть сконфигурирована в соответствии с любым из приведенных выше примеров, при этом система имеет один или несколько из первого датчика, второго датчика и/или третьего датчика, содержащего один или несколько из гидрофона, трехкомпонентного геофона и свободного от поперечных волн датчика, способного регистрировать сейсмические сигналы без значительного искажения поперечными волнами. Например, такая автономная сенсорная система может включать в себя один или несколько датчиков, содержащихся в области или корпусе с акустическим импедансом, подобным акустическому импедансу окружающей воды, чтобы акустические сигналы, проходящие через воду, передавались к датчикам при минимальном отражении.
Внешняя сторона корпуса может включать в себя или может быть образована как перфорированный жесткий корпус, покрытый гибким акустически прозрачным поверхностным слоем. Внутреннее пространство корпуса может быть заполнено жидкой средой, при этом как поверхностный слой, так и жидкая среда имеют акустический импеданс, по существу равный акустическому импедансу окружающей воды или морской воды. По меньшей мере один из датчиков может находиться во взвешенном состоянии в жидкой среде, так что находящийся во взвешенном состоянии датчик частично или в значительной степени изолирован от перемещения корпуса автономной сенсорной системы, вследствие чего датчик защищен от помехи от поперечных волн, проходящей через корпус.
Автономная сенсорная система может быть выполнена в соответствии с любым из приведенных выше примеров, а выходные сигналы одного или нескольких датчиков могут быть объединены для образования объединенного сейсмического сигнала. В таком объединенном сигнале могут быть значительно ослаблены эффекты образования волн-спутников и многократных волн, а объединенный сигнал может либо регистрироваться отдельно, либо дополнительно объединяться с выходным сигналом одного или нескольких других датчиков. Выходной сигнал однокомпонентного вертикального датчика может быть использован для удаления или снижения или уменьшения влияния помехи от поперечных волн в вертикальной или горизонтальной составляющей другого из датчиков, либо сам, либо в сочетании с выходным сигналом одного или нескольких дополнительных датчиков, таких как гидрофон.
Регистрируемая энергия поперечных волн может быть выделена для определения свойств подземной структуры на основании энергии поперечных волн. Предпочтительно выделять энергию поперечных волн объединением выходных сигналов датчиков и также предпочтительно регистрировать одним из датчиков как поперечные волны, так и продольные волны, а другим из датчиков регистрировать только продольные волны, при этом для выделения энергии поперечных волн также предпочтительно осуществлять вычитание одного или нескольких таких выходных сигналов.
Кроме того, таким сенсорным устройством можно выполнять измерения как линейных величин, так и величин поворота. Измерениями величин поворота можно получать по существу чистые данные поперечных волн, а наличие данных как о повороте, так и о перемещении позволяет вычислять производные волнового поля. Такие вычисления могут обеспечить удаление засорения поперечными волнами из данных океанического донного узла (ОДУ), также улучшенную интерполяцию данных основной или продольной волны (P-волны) и дополнительной или поперечной волны (S-волны или PS-волны), вследствие чего делаются возможными глубоководные исследования узлом с использованием C-волны (PS-волны или обменной волны).
Автономная свободная от поперечных волн или с пониженной чувствительностью к поперечным волнам сенсорная система может быть сконфигурирована для любого из приведенных выше примеров, при этом датчик включает в себя наружный или внешний корпус и внутренний корпус, находящийся во взвешенном состоянии в жидкой среде или среде, поглощающей поперечные волны, внутри внешнего корпуса, при этом предпочтительно, чтобы удельный вес внутреннего корпуса и удельный вес поглощающей поперечные волны среды были по существу одинаковыми для содействия нахождению внутреннего корпуса во взвешенном состоянии в жидкой среде или геле внутри внешнего корпуса. Наружный корпус можно сконструировать таким образом, что энергия поперечных волн будет диспергироваться или рассеиваться на корпусе, тогда как продольные волны будут проходить через корпус с по существу минимальным затуханием. Кроме того, наружный корпус может содержать перфорированный жесткий компонент корпуса, покрытый гибким акустически прозрачным поверхностным слоем, при этом продольные волны могут проходить через как наружный корпус, так и поглощающую поперечные волны среду, среда может содержать морскую воду или гель, и/или волны могут регистрироваться на геофоне, установленном во внутреннем корпусе.
Сенсорная система может быть сконфигурирована для любого из приведенных выше примеров с любым одним или несколькими датчиками, реализуемыми в виде акселерометра с одной массой, описанного выше. Точно так же, любой один или несколько датчиков могут быть сконфигурированы как шестикомпонентный датчик, описанный в этой заявке. Кроме того, любой один или несколько датчиков могут быть сконфигурированы как датчик с одной массой для независимого измерения энергии продольных волн, а также энергии поперечных волн, например, по одному, двум или трем различным ортогональным направлениям.
Если особо не указано иное, все ссылки на геофоны, используемые в изобретении, охватывают обычные геофоны, а также другие известные устройства для обнаружения действия сейсмических волн и направленные датчики, включая, но без ограничения, акселерометры, а ссылки на акселерометры таким же образом охватывают другие направленные датчики, включая, но без ограничения, геофоны. Хотя изложенное выше относится к вариантам осуществления настоящего изобретения, другие и дальнейшие варианты осуществления изобретения могут быть разработаны без отступления от основного объема его, а объем его определяется формулой изобретения, которая следует ниже.
Хотя это изобретение описано применительно к конкретным примерам вариантов осуществления, понятно, что изменения могут быть сделаны и эквиваленты могут быть подставлены для адаптации раскрытия к различным проблемам и применениям, но в пределах заявленных сущности и объема изобретения. Изобретение не ограничено примерами, которые описаны, а охватывает все варианты осуществления, попадающие в объем прилагаемой формулы изобретения.
Реферат
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных мероприятий. Предложен сейсмический датчик, который содержит центральную массу, имеющую три главные оси и расположенную внутри рамы. Множество преобразователей механически присоединены между рамой и центральной массой. Преобразователи размещены парами, при этом преобразователи в каждой паре соединены с противоположными сторонами центральной массы, образованными вдоль каждой из трех главных осей. Для образования выходного сигнала, характеризующего ускорение и поворот рамы, может быть предусмотрена электроника для объединения сигналов преобразователей в каждой паре. Технический результат - повышение точности и информативности получаемых данных. 4 н. и 30 з.п. ф-лы, 12 ил., 4 табл.
Комментарии