Акселерометр - RU166301U1
Код документа: RU166301U1
Чертежи
Описание
Предлагаемая полезная модель относится к приборостроению, а именно, к высокочувствительным акселерометрам, и может быть использовано при измерении малых ускорений и для контроля горизонта.
Наиболее близким техническим решением к предлагаемому по совокупности существенных признаков является акселерометр, содержащий корпус, чувствительный элемент, выполненный в виде полой втулки, внутренняя поверхность которой образует газодинамический подшипник с поверхностью вала, установленного и вращающегося в опорах корпуса, привод вращения вала, датчик линейных перемещений с катушками, регистрирующее устройство (см. Авторское свидетельство СССР №605179, опубл. 30.04.1978.)
Недостатком его является низкая точность измерения и чувствительность, поскольку показания зависят от стабильности скорости вращения вала.
Технической задачей предлагаемого устройства является повышение точности измерения ускорения и чувствительности устройства.
Для решения поставленной технической задачи акселерометр, содержит корпус, чувствительный элемент, выполненный в виде полой втулки, внутренняя поверхность которой образует газодинамический подшипник с поверхностью вала, установленного и вращающегося в опорах корпуса, привод вращения вала, датчик линейных перемещений с катушками, регистрирующее устройство, при этом полая втулка установлена подвижно, симметрично относительно катушек датчика линейных перемещений соединенных по дифференциальной схеме и выполнена со смещением центра масс в радиальном направлении, относительно ее геометрического центра, на расстояние

где:
m - масса втулки;
g - ускорение силы тяжести;
φ - угол поворота втулки до состояния равновесия равный 0,01-0,02 рад,
Мс - момент сопротивления слоя газовой смазки равный 0,1-0,9 Г×см,
Отличительной особенностью предлагаемого устройства является то, что полая втулка установлена подвижно, симметрично относительно катушек датчика линейных перемещений соединенных по дифференциальной схеме и выполнена со смещением центра масс в радиальном направлении, относительно ее геометрического центра, на расстояние

где:
m - масса втулки;
g - ускорение силы тяжести;
φ - угол поворота втулки до состояния равновесия равный 0,01-0,02 рад,
Мс - момент сопротивления слоя газовой смазки равный 0,1-0,9 Г×см,
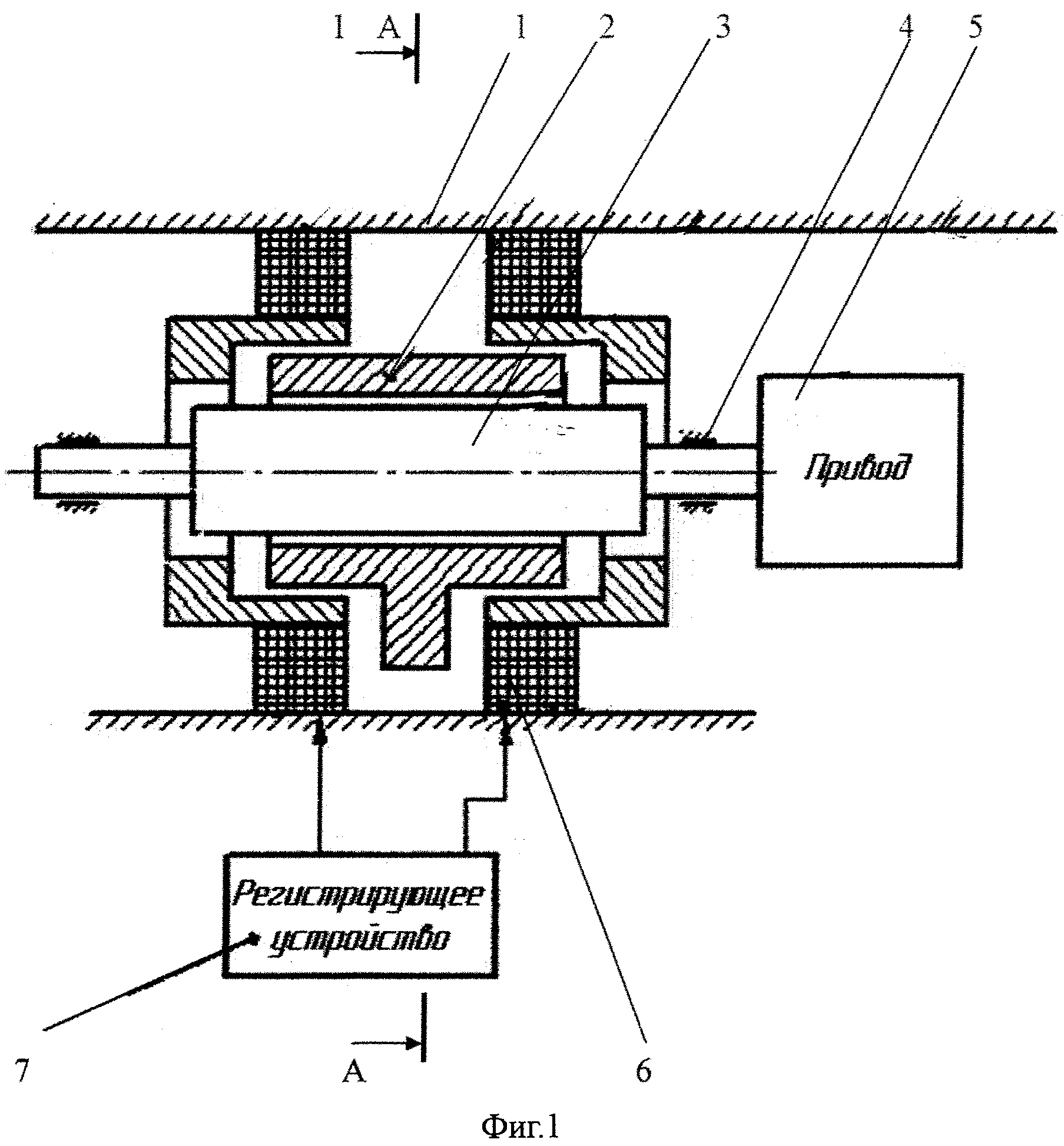
Предлагаемое устройство иллюстрируется чертежами, где на фиг. 1 представлен акселерометр в разрезе, а на фиг. 2 разрез по А-А фиг. 1.
Акселерометр, содержит корпус 1. Чувствительный элемент, выполнен в виде полой втулки 2, внутренняя поверхность которой образует газодинамический подшипник с поверхностью вала 3, установленного и вращающегося в опорах 4 корпуса 1. Устройство содержит привод 5 вращения вала 3, датчик линейных перемещений с катушками 6, регистрирующее устройство 7. Полая втулка 3 установлена подвижно, симметрично относительно катушек 6 датчика линейных перемещений соединенных по дифференциальной схеме и выполнена со смещением ее центра масс 8 в радиальном направлении, относительно ее геометрического центра 9, на расстояние

где:
m - масса втулки;
g - ускорение силы тяжести;
φ - угол поворота втулки до состояния равновесия равный 0,01-0,02 рад,
Мс - момент сопротивления слоя газовой смазки равный 0,1-0,9 Г×см,
Устройство работает следующим образом: акселерометр устанавливается на контролируемую поверхность, вал 3 раскручивается электроприводом 5, втулка 3 всплывает на слое смазки газодинамического подшипника.
На фиг. 2 показаны силы и моменты, действующие на втулку 2, при вращении вала 3 действуют: - момент сопротивления слоя газовой смазки Мс,
-вес втулки 2 mg приложенный к центру масс


Вектор веса втулки 2 раскладывается на две составляющие: нормальную составлявшую






где m - масса втулки;
g - ускорение силы тяжести»

φ - угол поворота втулки.
Из уравнения (1) следует, что угол поворота втулки выразится формулой:

Согласно уравнению (2) втулка 2 при вращении вала 3 повернется на стационарный угол и не будет вовлечена в синхронное вращение вместе с валом 3.
Выполнение смещения центра масс втулки в соответствии с уравнением
где:
m - масса втулки;
g - ускорение силы тяжести;
φ - угол поворота втулки до состояния равновесия равный 0,01-0,02 рад,
Мс - момент сопротивления слоя газовой смазки равный 0,1-0,9 Г×см, обеспечивает оптимальные параметры устройства.
Результат измерения не будет зависеть от стабильности скорости вращения вала, что существенно повышает чувствительность акселерометра и точность измерения
Реферат
Акселерометр, содержащий корпус, чувствительный элемент, выполненный в виде полой втулки, внутренняя поверхность которой образует газодинамический подшипник с поверхностью вала, установленного и вращающегося в опорах корпуса, привод вращения вала, датчик линейных перемещений с катушками, регистрирующее устройство, отличающийся тем, что полая втулка установлена подвижно, симметрично относительно катушек датчика линейных перемещений, соединенных по дифференциальной схеме и выполнена со смещением центра масс в радиальном направлении относительно ее геометрического центра, на расстояние l, равноегде m - масса втулки;g - ускорение силы тяжести;φ - угол поворота втулки до состояния равновесия, равный 0,01-0,02 рад,М- момент сопротивления слоя газовой смазки, равный 0,1-0,9 Г×см.
Формула
Комментарии