Способ и лидарная система для измерения турбулентностей атмосферы, осуществляемого на борту летательных аппаратов, а также в аэропортах и на ветровых электростанциях - RU2405172C2
Код документа: RU2405172C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу измерения турбулентностей атмосферы, к лидарной системе для измерения турбулентностей атмосферы, а также к летательному аппарату, в частности самолету или вертолету, оборудованному такой лидарной системой.
Из DE 19502993 А1 известен способ измерения трехмерных скоростей потока посредством лазерного луча с заданной длиной волны. При этом в поток вводят частицы-маркеры и несколько раз друг за другом освещают плоскостной измерительный объем с содержащим частицы-маркеры потоком. Этот многократно освещаемый измерительный объем отображается в направлении проецирования по меньшей мере на один фотоприемник с получением снимков освещаемого измерительного объема и определением трехмерных скоростей потоков на основании зафиксированных фотоприемником снимков многократно освещенного измерительного объема.
Турбулентность атмосферы в атмосфере вносит сильные возмущения в обтекание поверхностей крыла летательных аппаратов, так как повышает аэродинамическое сопротивление и ведет к значительным изменениям подъемной силы. Мероприятия по ее устранению или ослаблению предполагают ее своевременное распознавание и измерение.
Вместе с тем, измерение характеристик ветрового режима и турбулентности имеет большое значение и в других областях, например для ветровых электростанций. На ветровых электростанциях эффективность выработки электроэнергии зависит от правильной установки роторов с учетом ветрового режима и турбулентности. По этим причинам для эффективной и надежной работы ветровых электростанций большое значение имеет точное, бесконтактное измерение характеристического ветрового и вихревого поля при различных погодных условиях на выбранных объектах перед началом их строительства. Измерение этих воздушных характеристик метеорологическими станциями и в отдельных случаях доплеровскими лидарными системами считается в настоящее время еще очень трудоемким, дорогостоящим и неточным.
В аэропортах создаваемые взлетающим или приземляющимся самолетом турбулентности атмосферы, так называемые спутные вихри, образующие спутный след или спутную струю, оказывают значительное влияние на поведение в воздухе летящего сзади самолета. Обусловленные ими силы и моменты могут стать причиной, например, сноса или крена самолетов меньшего размера. Во многих случаях дело даже доходит до возникновения критических ситуаций в полете, которые в нескольких крайних случаях повлекли за собой летные происшествия.
В аэропортах с интенсивным воздушным движением во многих странах спутный след стал также серьезной экономической проблемой. Ведь из-за неопределенности их силы и положения Международная организация гражданской авиации (ICAO) предписывает выдерживать между взлетами и посадками минимальный временной интервал порядка 2-3 минут в зависимости от размеров самолетов, находящихся впереди и сзади. С другой стороны, ввиду возрастания объемов воздушных перевозок в крупных аэропортах существует необходимость общего сокращения интервалов между взлетами и посадками менее чем до одной минуты. Поэтому ведется настойчивый поиск решения для существенного снижения риска при пролете самолетов через зону спутных вихрей. Однако это предполагает их своевременное распознавание и измерение как в пасмурную погоду, так и в условиях хорошей видимости.
Спутные вихри возникают из-за различного характера обтекания нижней и верхней стороны крыльев во время отрыва потока на кромках и законцовках консолей крыла, а их сила зависит от размаха крыла и веса самолетов. Они образуют в вертикальной плоскости позади обоих крыльев с центром примерно на 2/3 их длины вращающиеся в противоположных направлениях спиральные воздушные вихри, диаметр которых приближается к половине длины крыла. Спутные вихри позади самолета несколько смещаются по высоте и распадаются на мелкие завихрения, пока через несколько минут не отдадут всю свою кинетическую энергию в виде тепла окружающему воздуху. Боковые и вертикальные воздушные потоки перемещают вихри в целом и влияют на их распадение. Выхлопные газы двигателей, прежде всего горячий воздух, сажа и водяные пары, примешаны к вихрям и отчасти совершают такие же движения, как они. В стратосфере спутные вихри можно разглядеть, например, по инверсионным следам водяного пара, тянущимся за самолетом.
Образование спутного следа является следствием подъемной силы и поэтому ни в ближайшем, ни в отдаленном будущем спутный след нельзя быть полностью устранить путем разработки новой конструкции крыла. Однако его интенсивность можно ослабить с помощью различных дополнительных аэродинамических мер, например путем разветвления или частичного разделения потока за крылом.
Для самолета, летящего сзади, опасны прежде всего несимметричный характер обтекания двух консолей крыла и внезапные приросты подъемной силы или попадание в нисходящие потоки, которые вблизи земли могут повлиять на весь самолет. Поэтому такие движения воздуха необходимо измерять заранее, т.е. с определенного минимального расстояния, с достаточным пространственным разрешением вдоль оси полета и перпендикулярно к ней. Поскольку посадки летательных аппаратов выполняются при всех возможных погодных условиях, должна быть обеспечена возможность обнаружения и измерения спутных вихрей как при пасмурной погоде, т.е. при плохой видимости, так и в ясную погоду или при полной видимости.
Уровень техники
В настоящее время сканирующий доплеровский радар позволяет в пасмурную погоду, т.е. при дожде, тумане и облачности, регистрировать движение крупных взвешенных в воздухе частиц или гидрометеоров диаметром от 10 мкм до нескольких миллиметров на расстоянии в несколько десятков морских миль. Поэтому доплеровские радары, установленные в аэропорту или на самолете, могут при пасмурной погоде обнаруживать такие воздушные потоки, как градиентные ветры и вихри. Получив сообщение или сигнал об их присутствии, пилот может облететь их на безопасном расстоянии.
Однако длина волны радара в диапазонах от сантиметрового до миллиметрового слишком велика, чтобы при ясной погоде обнаружить пригодное для анализа обратно рассеянное излучение в прочих, более мелких аэрозолях, например частиц диаметром меньше микрометра. По этой причине в настоящее время сегодня в порядке эксперимента в некоторых аэропортах с большой интенсивностью движения используются инфракрасные доплеровские лидары со значительно меньшей длиной волны. Поскольку обратное рассеяние от аэрозолей из-за их различной и зачастую лишь малой концентрации может сильно колебаться и даже обращаться в нуль, используют даже обратное рассеяние на значительно меньших молекулах воздуха в качестве целевой величины для обнаружения доплеровским ультрафиолетовым лидаром.
В публикации DE 10316762 А1 описан способ регистрации скорости ветра доплеровской лидарной системой. При этом лазерный луч от передающего устройства направляется в интересующую область пространства, а из интересующей области пространства принимается обратно рассеянный свет. Для определения доплеровского сдвига создается интерферограмма, распределение интенсивности которой сравнивается с контрольными картинами, заранее определенными для определенных параметров. По результатам сравнения определяется доплеровский сдвиг как мера скорости ветра.
Наземные метеорологические измерительные приборы или доплеровские радары и доплеровские лидары дают глобальное представление о ветровой и вихревой обстановке в аэропортах. Однако эта информация достаточна лишь для общего предупреждения о критических вихревых ситуациях для всех находящихся в данной зоне самолетов без учета опасности для отдельных самолетов. Ожидаемое в будущем общее сокращение взлетно-посадочных интервалов во всех аэропортах станет возможным лишь тогда, когда каждый самолет будет располагать собственной бортовой измерительной системой, своевременно обнаруживающей отдельные вихри на курсе полета при всех погодных условиях и непосредственно оценивающей их потенциальную опасность.
Доплеровские радары в автомобилях с рабочей частотой излучателя 24 ГГц и 77 ГГц способны при пасмурной погоде обнаруживать в узком угловом интервале сплошные препятствия, находящиеся вне поля зрения водителя. Это объясняется большим радиусом действия радарного излучения в тумане и дымке по сравнению с видимым светом. Однако атмосфера при этих частотах далеко не полностью прозрачна, принимается отчетливый сигнал от гидрометеоров самого тумана, который в этом варианте применения доплеровского радара для автомобиля отфильтровывается. Но этот фоновый сигнал тумана был бы в принципе пригоден, чтобы обнаруживать и отображать вихревое движение воздуха по движущимся с ним гидрометеорам. Особым преимуществом этих радарных частот является то, что они получили международный радиодопуск для общего транспорта и, следовательно, были бы особенно пригодны для радарного обнаружения порождаемых самолетом спутных вихрей.
Автомобильные радары имеют также то преимущество, что они уже сегодня могут выпускаться в очень компактном и дешевом исполнении. Для их доработки в системы вихревого предупреждения для самолетов или для управления полетами пришлось бы одновременно с расстоянием до них дополнительно отображать движения воздуха на большей площади перпендикулярно к направлению полета в нескольких местах впереди самолета. Сканирование более широкого углового диапазона впереди самолета можно было бы сегодня быстро производить электронным путем с помощью фазированных антенных решеток с высокой частотой повторений. В настоящее время целью является усовершенствование этих компактных радаров до уровня располагаемых на самолете систем распознавания вихрей в облаках, при сильном дожде и тумане с хорошим разрешением по дальности и углу.
Однако одного только такого перспективного радарного решения в условиях пасмурной погоды недостаточно для надежного обнаружения вихрей при полетах. Дело в том, что вихри при ясной погоде представляют не меньшую опасность, чем при пасмурной. Поэтому была предпринята попытка дополнить радар лидаром, т.е. дополнительно сканировать вихри в оптическом диапазоне спектра, в котором можно детектировать более мелкие частицы воздуха.
Но доплеровские лидары для измерения в прозрачной атмосфере далеко не так компактны, как доплеровские радары. Луч их излучателя при современной технике можно перемещать только механическими сканерами с малой угловой скоростью. В этом случае требуется большая длительность измерения, в течение которого самолет и зоны турбулентности перемещаются по оси измерений. Поскольку из-за этого данные измерения поступают не одновременно, они дают искаженное во времени отображение мгновенного движения воздуха впереди самолета. Особенным недостатком является низкое разрешение по скорости в осевом направлении, которое при низкой частоте повторения импульсов лидаров, в отличие от радаров, уже невозможно улучшить путем усреднения результатов множества измерений.
По сравнению с доплеровскими радарами доплеровские лидары имеют сегодня в целом очень сложную конструкцию и высокую стоимость и поэтому непригодны для установки на небольших самолетах, наиболее подверженных опасности со стороны летящих впереди них крупных самолетов.
В публикации US 2003/0009268 А1 описана система прогнозирования возникновения турбулентности в ветровых потоках для измерения скорости трехмерного воздушного потока, основанная на эффекте Доплера. При этом с самолета посылается лазерный луч, конически сканирующий интересующую область пространства. Обратно рассеянный свет из интересующей области пространства принимается посредством оптической системы, и с помощью эффекта Доплера на этой основе определяется скорость воздушного вихря в пространстве.
В патенте US 4195931 описано устройство для определения места и интенсивности турбулентности атмосферы, в котором импульсный лазерный луч направляется в интересующую область пространства и анализируется обратно рассеянный свет лазера. При этом интерференционная картина принятого света определяется посредством спектроскопа. Спектр обратно рассеянного света соотносится со стандартным спектром, полученным при отсутствии турбулентности атмосферы.
В публикации DE 4013702 С2 описаны способ и устройство для регистрации зон турбулентности в атмосфере, в которых лазерный пучок заданной частоты излучается в выбранную область пространства, а обратно рассеянный свет из этой области пространства улавливается и накладывается на излученный свет. Определяется доплеровский сдвиг частот излученного и обратно рассеянного света и на этой основе определяются направление и скорость ветра в направлении измерения. При этом лазерный пучок делится на два отдельных пучка, причем первый отдельный пучок излучается в область пространства, а обратно рассеянный свет из интересующей области пространства накладывается на второй отдельный пучок.
В документе US 6184981 В1 раскрывается способ, при осуществлении которого посылается импульсный лазерный луч, который отражается от цели, при этом спектр принятого сигнала сравнивается с контрольным спектром. В статье "Two-channel direct-detection Doppler lidar employing a charge-coupled device as a detector" Ирганга, Тодда Д. и др., журнал Applied Optics, т.41, №6 от 20 февраля 2002 г., описан двухканальный доплеровский лидар, использующий в качестве детектора ПЗС-камеру. Лидарная система измеряет ветровые движения воздуха с помощью обратно рассеянного от аэрозолей и молекул света в двух отдельных каналах, причем световой сигнал в одном канале направляется в другой.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы предложить подходящий способ обнаружения турбулентности атмосферы и спутных вихрей при ясной погоде.
Задачей также является разработка соответствующей измерительной системы, которая могла бы иметь компактное исполнение и одновременно позволяла бы обнаруживать неоднородности и движения воздуха на большой площади, т.е. в расширенном угловом диапазоне, перпендикулярно к оси измерения. Такая измерительная система должна быть пригодной для дистанционного измерения, т.е. для измерений на определенном значительном расстоянии и в ограниченном объеме. При этом измерение должно быть нечувствительным к движению в направлении оси измерения.
Эта задача решается в способе измерения турбулентностей атмосферы согласно пункту 1, в лидарной системе по пункту 13 и в применении лидарной системы по пункту 24 формулы изобретения.
При осуществлении предлагаемого в изобретении способа измерения турбулентностей атмосферы посредством лидарной системы в направлении интересующей области пространства посылают расширенный импульсный лазерный луч с заданной длиной волны и принимают обратно рассеянный свет из интересующей области пространства, причем в первый момент времени t1 и во второй момент времени t2 после посылки лазерного импульса измеряют распределение интенсивности в поперечном сечении потока обратно рассеянного света и на основании сравнения двух распределений интенсивности определяют турбулентность атмосферы в удаленном поле измерений. Изобретение позволяет распознавать или обнаруживать и отображать турбулентности атмосферы и спутные вихри. Предлагаемый в изобретении способ особенно пригоден для распознавания во время полета спутных вихрей, создаваемых летящими впереди самолетами и находящихся на определенном расстоянии впереди по курсу. При этом удаление измерительного поля определяется моментами времени t1 и t2, т.е. временем прохождения посланного и обратно рассеянного слоями воздуха на различном расстоянии лазерного импульса.
Предлагаемый в изобретении способ не предусматривает измерение осевого доплеровского сдвига, а использует рассеяние лазерного луча при прохождении через зоны турбулентности и ветры, дающее смешанную мелко- и крупнозернистую картину интенсивности, так называемые спеклы.
В предпочтительном варианте осуществления изобретения путем измерения распределения интенсивности обнаруживают такие спеклы, возникающие при обратном рассеянии лазерного импульса на молекулах воздуха, с определением турбулентности атмосферы на основании сравнения спекл-картин. Это означает, что по мгновенному изображению спеклов можно обнаружить и измерить турбулентность атмосферы.
В предпочтительном варианте осуществления изобретения распределения интенсивности в оба момента времени t1 и t2 регистрируют с помощью камеры при заданном времени экспозиции и на основании полученных снимков формируют графическое представление вариации показателя преломления в поле измерений. Это означает, что по двойным снимкам, сделанным друг за другом с коротким временным интервалом, можно определить движение воздуха перпендикулярно к оси измерения или оптической оси. Поскольку эти снимки одновременно охватывают широкую область, определяемую углом съемки, отпадает необходимость сканирования пространства, сопряженного со значительными затратами времени, и поперечное разрешение в пространстве и по скорости остается равномерно хорошим во всем угловом диапазоне.
Рассеяние лазерного луча с первоначально однородной характеристикой интенсивности по его поперечному сечению с получением зернистой пятнистой картины, грануляций или спеклов является следствием различной длины оптических путей отдельных лучей или элементарных волн лазерного луча через области воздуха с различным показателем преломления. Вследствие когерентности первичного излучения эти элементарные волны, рассеянные на составных частях воздуха, т.е. как на молекулах, так и на частицах аэрозолях, также когерентны. Тогда амплитуда и фаза элементарных волн изменяется по отношению друг к другу от места к месту в пределах луча. Наконец, они накладываются друг на друга в пространстве, образуя сложное интерференционное поле с распределенной в пространстве нерегулярной интенсивностью. При таких движениях воздуха, как вихри, и при связанных с ними изменениях структуры показателя преломления модулируется в пространстве и времени также интерференционная картина, т.е. спеклы.
Вариации показателя преломления воздуха обусловлены преимущественно разностями температур. В спутных вихрях, тянущихся за самолетами, вследствие движения воздуха и распада вихрей возникают градиенты давления и температуры. Дополнительно вблизи к поверхности земли из-за ее нагрева в дневное и охлаждения в ночное время возникают температурные градиенты в воздухе, которые завихряются взлетающими и приземляющимися самолетами. Кроме того, к завихренному воздуху примешиваются горячие выхлопные газы двигателей - прежде всего водяные пары и окись углерода. В целом в спутном следе позади самолета при взлете или посадке возникает структурированное температурное поле, что одновременно ведет к неравномерному распределению показателя преломления воздуха.
В отличие от эффекта Доплера, в случае которого по осевому сдвигу частот или длин волн обратно рассеянного света определяется поперечная составляющая движения воздуха, а сканирование обеспечивает индикацию атмосферной турбулентности на большой площади, использование спеклов позволяет регистрировать пространственную неравномерность показателя преломления, вызванную завихрением, одновременно на большей площади и определять ее на основании сравнения двух отдельных изображений распределения спеклов в разные моменты времени, причем регистрируются модуляция показателя преломления или спекл-картины во времени и дополнительно поперечная составляющая скорости движения воздуха. Важными для использования спеклов являются их статистически распределенные размер и интенсивность. Следовательно, они пригодны для однозначной индикации как мелких, так и крупных структур распределения показателя преломления.
В этом смысле вариации показателя преломления играют в предлагаемой в изобретении измерительной системе роль, схожую с ролью аэрозолей при использовании радаров и лидаров. Как точки изменений показателя преломления, так и частицы аэрозолей служат центрами (очагами), которые переносятся с воздухом и движение которых одновременно может характеризовать движение воздуха. Как это обстоятельство можно конкретно использовать для измерения турбулентности с помощью спеклов согласно изобретению, будет подробно рассмотрено ниже.
В общепринятом на сегодняшний день описании предложенной Колмогоровым модели развития турбулентности во времени предполагается, что возникающие в атмосфере турбулентности с так называемым "наружным" диаметром L0 до нескольких десятков или сотен метров со временем каскадно распадаются вследствие внутреннего трения воздуха на все уменьшающиеся турбулентности без энергообмена с окружающей средой, пока, наконец, не приобретут минимальной величины l0, так называемого "внутреннего" диаметра (порядка нескольких миллиметров), и не растворятся в окружающем воздухе, отдав всю свою кинетическую энергию в виде тепла преимущественно вследствие конвекции и диффузии. Этот процесс со временем приводит к образованию внутри вихрей температурного поля мелкозернистой структуры, которое медленно исчезает лишь за счет выравнивания температуры с окружающим воздухом.
Показатель преломления n гораздо в большей степени зависит от температуры Т, чем от колебаний давления воздуха p, причем незначительным влиянием влажности воздуха в видимой области спектра можно пренебречь:
n=1+77,6×10-6(1+7,52×10-3λ-2)р/Т
n=1+79×10-6р/Т и dn/dT=79 р/T2,
где р - давление воздуха в миллибарах, Т - температура в градусах Кельвина и λ - длина волны в мкм (здесь, например, λ=0,5 мкм).
Зависимость усредненной по времени вариации показателя преломления от положения в пространстве выражается так называемой структурной функцией показателя преломления Dn(x, r):
Dn(x,r)=<{n(х+r)-n(х)}2>,
где переменные х и r представляют трехмерные радиус-векторы.
Если величина вектора дальности r находится в пределах между наружным и внутренним диаметрами L0 и l0, то структурную функцию можно представить как функцию расстояния и структурного параметра показателя преломления



Структурный параметр показателя преломления



где

Согласно изобретению вихревое поле измеряют расширенным импульсным лазерным лучом. Для расстояния r=1 м и

При каждой встрече парциальных волн с мельчайшими ячейками турбулентности они всякий раз отклоняются на угол дифракции порядка λ/l0=10-4 рад (например, если λ=0,5 мкм и l0=5 мм), что при прохождении более длинного пути через поле турбулентности ведет к заметному смещению и расширению луча.
Небольшая часть энергии луча рассеивается на молекулах воздуха и частицах аэрозолей, причем часть рассеянного света уходит в обратном направлении, т.е. к излучателю. Однако интенсивность обратно рассеянного света по поперечному сечению расширенного лазерного луча не равномерна, а из-за образования спеклов распадается на островки высокой и низкой интенсивности, которые воспроизводят пространственные и временные вариации показателя преломления.
Поэтому согласно изобретению предлагается, например, отображать и измерять поперечные изменения локальных неоднородностей показателя преломления или спеклов посредством принятой в лидарных системах геометрии измерения, при которой лазерный излучатель и приемник установлены в одном и том же месте. При этом из атмосферы принимают обратное рассеяние посланного расширенного импульсного лазерного луча и анализируют пространственное и временное распределение его интенсивности. Для такого отображения в качестве приемника можно использовать, например, электронную съемочную систему (камеру), которая с постоянными временными интервалами с определенного расстояния измерения периодически регистрирует и анализирует трехмерную характеристику интенсивности обратно рассеянного света от посланного расширенного импульсного лазерного луча.
Измерение производится предпочтительно в обратном направлении, т.е. в отраженном свете. Далее предпочтительным в смысле изобретения является процесс измерения с временным разрешением, при котором по отображению поля спеклов или поля течения регистрируется протяженная плоскость измерения ограниченной толщины на постоянном удалении от измерительной системы. Это позволяет с помощью изображения спеклов визуализировать поля ветров, турбулентности и спутные вихри в ясной атмосфере в отдельных цилиндрических областях, находящихся на большом расстоянии.
Предлагаемая в изобретении лидарная система для измерения турбулентностей атмосферы особенно подходит для летательных аппаратов и содержит лазер для посылки в интересующую область пространства расширенного импульсного лазерного луча с заданной длиной волны, детектор для измерения распределения интенсивности в поперечном сечении потока обратно рассеянного света из интересующей области пространства в первый момент времени t1 и во второй момент времени t2 после посылки лазерного импульса, блок синхронизации, сопрягающий детектор с лазером для инициирования измерений в моменты времени t1 и t2, и блок обработки данных, который на основании сравнения измеренных распределений интенсивности определяет турбулентность атмосферы.
С помощью предлагаемой в изобретении лидарной системы можно измерять турбулентность атмосферы и спутные вихри летящих впереди самолетов также при ясной погоде. Кроме того, лидарную систему можно выполнить очень компактной, что позволит использовать ее на борту самолетов.
Детектор предпочтительно выполнен с возможностью определения положения спеклов, возникающих при обратном рассеянии лазерного импульса на молекулах воздуха, а блок обработки данных выполнен, в частности, с возможностью сравнения спекл-картин для определения турбулентности атмосферы на основании результатов их сравнения.
В предпочтительном варианте осуществления изобретения детектор включает в себя по меньшей мере одну камеру, которая при заданном времени экспозиции регистрирует распределения интенсивности в моменты времени t1 и t2, причем блок обработки данных на основании полученных снимков формирует графическое представление вариации показателя преломления в поле измерений. Это позволяет визуализировать турбулентности атмосферы для экипажа самолета.
Предлагаемая в изобретении отображающая лидарная система позволяет измерять или визуализировать трехмерную динамику движения воздуха в зонах турбулентности. Это осуществляется путем приема обратно рассеянного света из плоскости поперечного сечения расширенного импульсного лазерного луча, который проходит через зоны турбулентности и за счет этого рассеивается, создавая спекл-картину, с помощью электронной камеры, включаемой синхронно с посылаемым импульсом.
Лидарную систему можно использовать, например, и как стационарную наземную измерительную систему. В этом случае можно целенаправленно контролировать определенные зоны аэропортов, например взлетно-посадочные полосы, на наличие спутных вихрей или турбулентностей атмосферы. Изобретение позволяет достаточно точно определять местоположение вихрей, поэтому пилоты летательных аппаратов могут обходить их. В частности, такую измерительную систему можно скомбинировать с системой управления полетом летательного аппарата, чтобы при возникновении турбулентности атмосферы по направлению полета непосредственно вмешиваться в управление полетом. В этом случае может происходить даже непосредственное вхождение летательного аппарата в спутный след другого летательного аппарата. Подобно системе поддержки водителя в автомобилях при таком варианте осуществления изобретения по меньшей мере частично автоматически исключается влияние вихрей на движение самолета в полете, что позволяет избежать опасных ситуаций.
Наряду с использованием в авиации изобретение можно использовать и для других измерительных задач, в частности для измерения воздушных потоков и турбулентности атмосферы при ясной погоде в районе ветровых электростанций.
Благодаря моностатическому расположению лидарной системы, при котором излучатель, т.е. лазер, и приемник, т.е. детектор, находятся в одном и том же месте, можно производить измерение турбулентности атмосферы с движущегося объекта, в частности с самолета. Однако и при измерениях с земли, например с аэродрома или с ветровой электростанции, моностатическое расположение имеет то преимущество, что посылаемый и принимаемый луч можно обрабатывать совместно в одном устройстве, что особенно важно при мобильных измерениях.
Для принятия во внимание этих новых условий, новой схемы взаимного расположения излучателя и приемника, увеличения расстояния до измеряемого объема воздушной массы и движения измерительного прибора предлагаются следующие конструктивные варианты осуществления изобретения:
Посылаемый луч целесообразно расширять соосно с принимаемым лучом, чтобы высветить большую площадь измеряемого объема с визируемого расстояния измерения, т.е. больший угол измерения, причем камера, например, одновременно регистрирует все поле спеклов измеряемого объема. Благодаря этому отпадает необходимость в последовательном сканировании измеряемого объема.
Из-за неоднородностей атмосферы расширенный лазерный луч кумулятивно разлагается на множество отдельных островков интенсивности или объективных спеклов. Для наблюдателя, находящегося сбоку от лазерного луча и смотрящего навстречу ему, эти островки интенсивности поперечного сечения представляются длинными, узкими светящимися следами (нитями) внутри всего луча. Если бы весь луч падал на экран, то спеклы выглядели бы как грануляционное поле в пределах сечения лазерного луча, временные изменения которого соответствовали бы поперечному движению воздуха. Однако поскольку для измерения нельзя установить экран, изобретением предлагается использовать в качестве экрана саму атмосферу, т.е. обратное рассеяние от цилиндрической области пространства определенной толщины. Поскольку камера имеет также очень короткую выдержку, процесс перемещения спеклов фиксируется моментальными снимками.
Камеру устанавливают, например, так, чтобы она была направлена по оси расширенного импульсного лазерного луча. Короткую выдержку камеры можно использовать таким образом, чтобы этот "атмосферный экран" определенной толщины на отрегулированном удалении служил в качестве "стены" от которой идет световой эхо-сигнал спеклов. По истечении определенного времени прохождения импульса, соответствующего двойному пути распространения света до "стены", затвор камеры открывается и вскоре после этого закрывается, причем время экспозиции соответствует в этом случае толщине отражающей "стены". То, что отображается, является для каждого импульса моментальным снимком интенсивности спеклов не только в направлении отражающей "стены", но и на обратном пути от стены до приемника. Дополнительно вследствие дифракции света и отображения оптической приемной системы перед камерой и ее приемной апертурой возникают так называемые субъективные спеклы, которые в снимке камеры накладываются на объективные спеклы.
В прозрачном воздухе преобладает процесс единичного рассеяния, т.е. доля многократно рассеянных фотонов в обратном рассеянии исчезающе мала. Только при высокой плотности аэрозолей, т.е. в тумане или в облаках доля многократно рассеянных фотонов в аэрозолях на больших участках пути, т.е. только через несколько десятков метров, становится заметной. Для рассматриваемых здесь способов измерения это означает, что атмосфера в тонких слоях порядка нескольких метров для поверхностного освещения подобно своего рода экрану обратного рассеяния отражает свет без бокового распространения вследствие многократного рассеяния. Поэтому тонкие слои атмосферы можно использовать как своего рода экран, который отражает изображения в направлении проектора без заметного уменьшения контраста вследствие бокового рассеяния. Эти изображения, отраженные от атмосферы с обратным рассеянием, весьма слабы по сравнению с изображениями на твердом экране из-за низкой отражающей способности воздуха. Однако коротковолновое импульсное лазерное излучение и типичная энергия импульсов стандартных лазеров позволяют получить пригодные для анализа сигналы из протяженного слоя с расстояния в несколько сотен метров. Ниже это поясняется подробнее.
Атмосферные объективные спеклы, как уже говорилось, возникают вследствие кумулятивного разложения первоначально однородного лазерного луча в направлении его распространении на пятна интенсивности, т.е. на сильную модуляцию интенсивности из-за интерференции парциальных волн, обусловленной различными показателями преломления воздуха и рассеянием на частицах аэрозолей по всему поперечному сечению луча. Модуляция интенсивности и величина спеклов имеют статистическое распределение и зависят от структурного параметра
Спеклы, возникающие после выхода импульсного лазерного луча из лидара до достижения заранее определенного слоя на определенном расстоянии в поперечном сечении луча, благодаря однородным свойствам обратного рассеяния молекул воздуха без мешающего бокового распространения становятся видимыми как грануляция объективных спеклов и могут регистрироваться камерой, установленной за приемным телескопом. При типичном линейном увеличении 1/100 и первоначальном среднем диаметре спеклов 5 мм их диаметр в фокальной плоскости телескопа будет равен 50 мкм, что в пять раз больше типичного диаметра пикселя камеры на приборах с зарядовой связью (ПЗС-камеры), составляющего 10 мкм.
Дополнительно к объективным спеклам в самой приемной апертуре возникают статистически распределенные интерференции волн, создающие субъективные спеклы с нижним предельным значением диаметра ds=1,2λf/D, где D - диаметр приемной апертуры. При λ=0,267 мкм и числе F (относительной светосиле) приемной оптики (F=f/D), равном 10, диаметр ds=3,2 мкм или равен изображению удаленной частицы аэрозоля. Но здесь в случае субъективных спеклов речь идет о нижнем предельном значении, причем большие спеклы возникают с большей частотой. В целом они значительно меньше, чем объективные спеклы и поэтому не играют роли при анализе изображения.
Для отображения спеклов только с одного определенного расстояния измерений приемная камера предпочтительно оснащается схемой кратковременного включения, которая обеспечивает регистрацию света только после определенного времени прохождения посланного лазерного импульса и по истечении короткого интервала времени снова выключается. Этот способ задания расстояния путем измерения времени прохождения импульса позволяет ограничивать во времени регистрацию изображения области измерения (синхронизированная съемка), т.е. делать снимок обратного рассеяния (эхо-сигнала) от исследуемой цилиндрической области воздушного пространства, имеющей определенные диаметр и толщину, вдоль оптической оси с постоянного расстояния, задаваемого через время прохождения импульса.
В зависимости от того, регистрируется ли неоднородность показателя преломления или температуры при мгновенной турбулентности атмосферы, или же распределение скорости воздуха, изобретение предпочтительно включает в себя два разных аспекта: (А) измерение спекл-картины в разных местах вдоль одной и той же измерительной оси в одно и то же время и (Б) двукратное измерение спекл-картин, как в случае (А), через определенные короткие промежутки времени. В случае (А) регистрируется градиент показателя преломления Δn/Δr(х,у), в случае (Б) - его изменение во времени Δn/ΔrΔt (х,у).
Согласно третьему аспекту (В) изобретения вместо использования спеклов в качестве измерительного зонда для отображения мгновенной турбулентности атмосферы или движения воздуха используется пространственно модулированный лазерный луч (структурированное лазерное излучение). При этом в качестве дополнения или альтернативы измерению спеклов можно отображать как вариации показателя преломления Δn/Δr (х,у), так и его изменения во времени Δn/ΔrΔt (x,y) посредством двойных импульсов и двойной экспозиции.
Краткое описание чертежей
Ниже сущность изобретения поясняется на примерах его осуществления, сопровождаемых чертежами, на которых показаны:
на фиг.1 - лидарная система для измерения турбулентностей атмосферы согласно первому предпочтительному варианту осуществления изобретения,
на фиг.2 - лидарная система для измерения турбулентностей атмосферы согласно второму предпочтительному варианту осуществления изобретения,
на фиг.3 - лидарная система для измерения турбулентностей атмосферы согласно третьему предпочтительному варианту осуществления изобретения,
на фиг.4 - графическое представление вихревой структуры, формируемое предлагаемым в изобретении способом с помощью лидарной системы, причем радиальное искажение изображения происходит вследствие собственного движения летательного аппарата с измерительной системой на борту,
на фиг.5 - голографический расщепитель пучка, который делит измерительный луч согласно предпочтительному варианту осуществления изобретения на дискретные измерительные лучи и
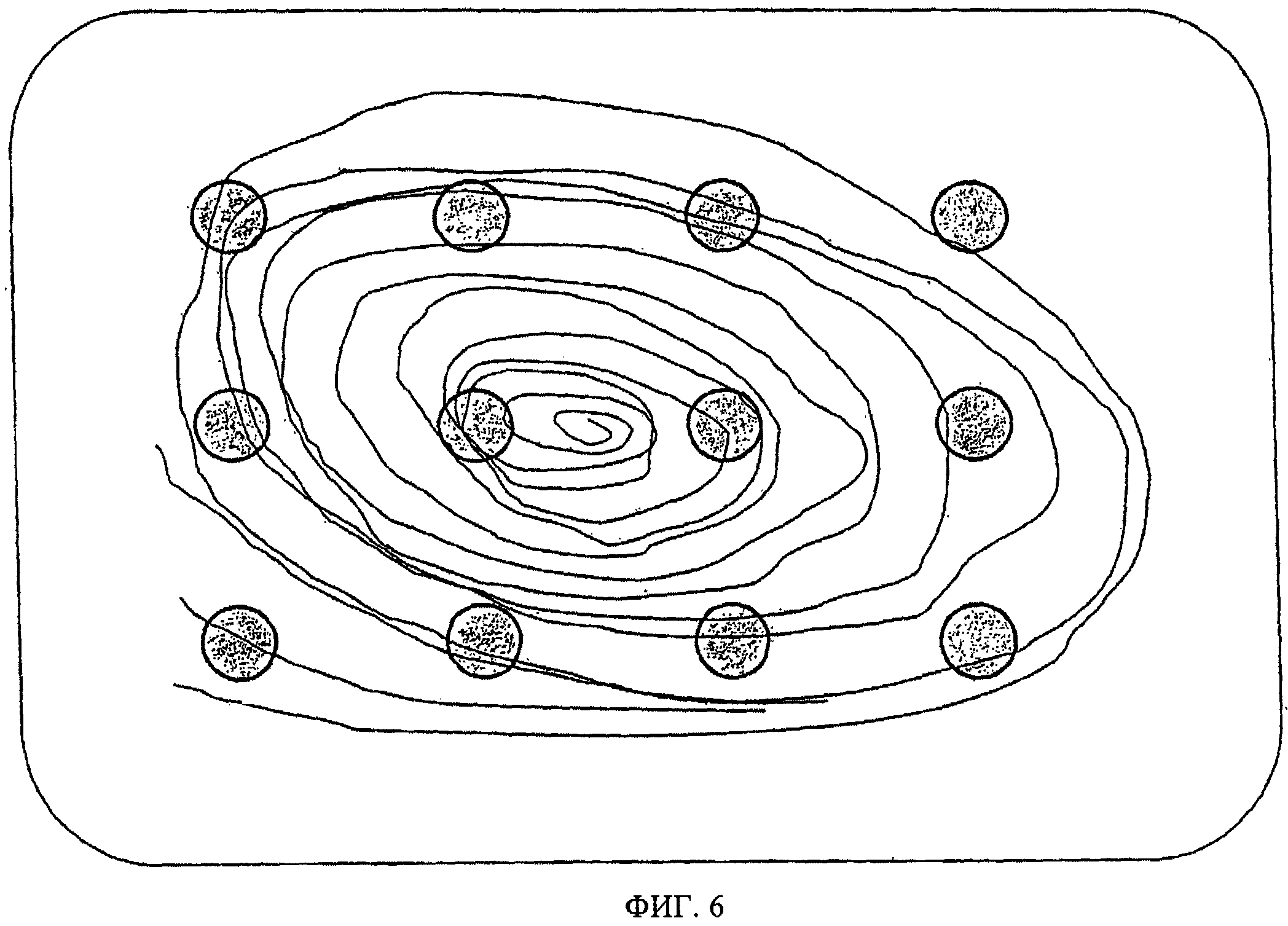
на фиг.6 - пример наложения дискретных круглых полей измерения на вихревую структуру.
Осуществление изобретения
На фиг.1 показана лидарная система 100 для регистрации и измерения турбулентностей атмосферы согласно первому предпочтительному примеру исполнения. Предлагаемая в изобретении лидарная система включает в себя лазер 10, который посредством оптической системы 11 с блоком 11а линз и отклоняющим зеркалом 11b посылает расширенный импульсный лазерный луч 12 с заданной длиной волны в интересующую область пространства. Детекторное устройство 21, 22 служит для измерения распределения интенсивностей в поперечном сечении потока обратно рассеянного света из интересующей области пространства, причем измерение производится в первый момент времени t1 и во второй момент времени t2 после посылки лазерного импульса L. Блок 25 синхронизации обеспечивает сопряжение детекторного устройства, состоящего из двух детекторов 21, 22, с лазером 10. Блок 25 синхронизации управляет детекторами 21, 22 таким образом, чтобы проводить измерение в каждый из двух моментов времени t1 и t2 после посылки лазерного импульса L. Блок 30 обработки данных сравнивает измеренные детекторами 21, 22 распределения интенсивности, чтобы по результатам сравнения определить турбулентность атмосферы. Блок 30 обработки данных связан электронными средствами с системой формирования изображений.
При выполнении измерения посылается лазерный импульс L, который на своем пути проходит сквозь атмосферу и при этом рассеивается на молекулах воздуха и частицах аэрозолей. На фиг.1 показаны два измеряемых объема V1 и V2, расположенных вдоль общей оси S луча и отделенных друг от друга в пространстве. Через приемный телескоп 23 и светоделитель 24 обратно рассеянный свет из двух измеряемых объемов V1 и V2 направляется к детекторам 21 и 22. Расстояние z до первого измеряемого объема V1 определяется моментом времени t1 после посылки лазерного импульса L, в который происходит обнаружение обратно рассеянного света детектором 21. Расстояние до второго измеряемого объема V2 определяется моментом времени t2 после посылки лазерного импульса L, в который происходит обнаружение обратно рассеянного света детектором 22.
В качестве детекторов 21, 22 служат камеры, регистрирующие рассеянные сигналы от измеряемых объемов V1 и V2. В представленном примере используются две одинаковых камеры с усилителем сигнала изображения, которые с помощью светоделителя делят между собой общую ось приема и время экспозиции которых синхронно с посылкой лазерного импульса устанавливается посредством схемы кратковременного включения таким образом, чтобы они регистрировали световые сигналы, поступающие по оси луча S от пространственно разделенных измеряемых объемов V1 и V2. Благодаря съемке двумя отдельными камерами рассеянные сигналы от двух различных измеряемых объемов V1 и V2 могут разделяться во времени, хотя время прохождения лазерного импульса L до первого и второго измеряемого объема и обратно чрезвычайно мало. Вместе с тем, можно использовать также одну камеру, быстродействия которой достаточно для разделения рассеянных сигналов от двух расположенных друг за другом измеряемых объемов V1 и V2.
В приведенном здесь примере в качестве лазера 10 используется моноимпульсный лазер с длительностью лазерного импульса L, равной Δτ.
В качестве детекторов 21, 22 в приведенном примере служат ПЗС-камеры с предвключенным усилителем сигнала изображения в виде многоканальной платы 26 (МКП, от англ. Multi-channel plate). МКП 26 имеет две задачи. Первая задача состоит в том, чтобы по принципу фотоэлектронного умножителя усиливать слабый поток фотоэлектронов светового сигнала от фотокатода в снабженной микроканалами плате, прежде чем направить его на фосфоресцирующий экран, где он регистрируется ПЗС-матрицей. Второй задачей МКП 26 является включение камеры 21 на прием путем включения питания ее усилителя в момент времени t1=2t0 после посылки лазерного импульса (t=0) и выключение ее по истечении времени t1ε=2(t0+δt).
Аналогично этому плата МКП 26 включает камеру 22 на прием при t2=(2t0+Δt) и снова выключает ее при t2ε=2 (t0+Δt+δt). Здесь 2×Δt означает временной интервал между двумя снимками, а 2×δt - соответствующую одинаковую длительность экспозиции обеих камер 21, 22. При скорости света сΔz=cΔt - это расстояние между двумя измеряемыми слоями толщиной δz=cδt.
На снимках 1 и 2 обеих ПЗС-камер 21, 22 показаны спеклы для времени прохождения импульса 2(t0+δt) и 2(t0+Δt+δt), возникшие вдоль пути измерения. Они состоят из объективных спеклов на пути к отражающим слоям V1 и V2 и обратно и субъективных спеклов приемной системы. Теперь устанавливают взаимную корреляцию двух изображений, в простейшем случае вычитая одно из другого. Результатом является графическое представление только вариаций показателя преломления вдоль поля измерения между двумя слоями V1 и V2, которое, например представляет собой вихрь. Поскольку атмосферные воздействия на общем пути прохождения импульсов одинаковы, они при взаимной корреляции отпадают и остается только влияние составляющей пути между двумя слоями.
Как пояснялось выше, эта вариация показателя преломления по существу отражает неоднородности температуры завихрения. Однако поскольку она непрерывно создается за счет кинетической энергии движущегося воздуха и в то же время снова исчезает из вихрей вследствие диффузии тепла и конвекции, это температурное поле является критерием еще сохраняющейся структуры завихрения.
Использование периодически определяемых лазерных импульсов (например 10 Гц) с интервалом τ позволяет, например, при типичной посадочной скорости самолета 100 м/с получать виды в разрезе завихрения, например, через каждые 10 м. При типичном времени включения камер 2×δt=20 нс толщина атмосферного экрана составила бы δz=3 м. Расстояние между слоями V1 и V2 в этом случае выбирается равным пути, который самолет пролетает между двумя импульсами. Δt=10 м. Однако понятно, что все параметры, например время измерения δt, интервал τ между лазерными импульсами и временной интервал 2×Δt между двумя снимками можно свободно выбирать в определенных пределах и согласовывать со скоростью самолета, ожидаемой скоростью вихрей и необходимой разрешающей способностью измерения.
На фиг.2 показана лидарная система 200 согласно второму предпочтительному варианту осуществления изобретения, позволяющая отображать развитие вихрей во времени. Это означает, что можно показать не только мгновенную неоднородность воздуха, т.е. стоп-кадр, но и получить непосредственное изображение поля скоростей турбулентного воздуха. Детали и элементы лидарной системы, представленной на фиг.2, выполняющие те же функции, что и в системе, показанной на фиг.1, имеют здесь те же обозначения, что и на фиг.1.
В лидарной системе, показанной на фиг.2, вместо одного лазерного импульса посылается пара импульсов с временным интервалом δτ. На рынке предлагаются лазеры, излучающие такие двойные импульсы с регулируемым временным интервалом (например, 1-30 мс, в большинстве случаев два лазера с синхронной модуляцией добротности). Имеются также соответствующие камеры с усилителем сигнала изображения, которые могут делать снимки с очень коротким временным интервалом и сохранять их в памяти.
При этом детекторы 21, 22 выполнены как камеры с двойной экспозицией, а лазер 10 - как двухимпульсный лазер.
Комбинация двухимпульсного лазера 10 и камер 21, 22 с двойной экспозицией позволяет посредством первого лазерного импульса L устанавливать взаимную корреляцию изображений 1 и 2 от измеряемых объемов V1 и V2, а затем взаимную корреляцию изображений 1' и 2', принимаемых от второго лазерного импульса L' от измеряемых объемов V1 и V2. На основании полученных таким путем двойных изображений турбулентного движения в различные моменты времени после второй корреляции смещения спеклов представляют скорости движения воздуха. Если, например, временной интервал двойных импульсов равен 1 мс, а скорость движения воздуха в вихре - 50 м/с, значит спеклы переместились на 50 мм. При масштабе изображения 1/100 это соответствует смещению на 500 мкм в фокальной плоскости камеры с пиксельным расстоянием 10 мкм.
Для установления корреляции изображений 1 и 2, принятых от первого импульса L, служит коррелятор 31, а для корреляции изображений 1' и 2', принятых с первым импульсом L' - коррелятор 32. Еще один коррелятор 33 используется для второй ступени корреляции, на которой путем установления корреляции выходных сигналов корреляторов 31 и 32 определяется скорость движения воздуха.
Преимуществом представления движения спеклов во времени является одновременная индикация движения измерительной оси самолета на изображении. Во временном интервале между двумя импульсами ΔT=1 мс при скорости самолета ν=100 м/с он перемещается вперед на 0,1 м. При угле отклонения от оси φ=1° соответствующая точка измерения переместится в радиальном направлении от оси движения на δr=τνtgφ=1,7 мм или при масштабе изображения 1:100 - на 17 мкм в фокальной плоскости камеры, что соответствует 1,7-кратному диаметру пикселя. По световому потоку из этого центра движения с помощью нескольких серий измерений определяются угол атаки и угол скольжения самолета в проекции на измеряемый слой, как показано на фиг.4, что особенно полезно для управления полетом летательного аппарата.
Вместо камеры с двойной экспозицией можно использовать четыре отдельных камеры, причем в этом случае обратно рассеянные световые сигналы от каждого лазерного импульса принимаются двумя камерами, и все камеры с помощью светоделителя приводятся к общей оптической оси.
В вариантах осуществления изобретения, показанных на фиг.1 и 2, прямой лазерный луч используется в качестве измерительного луча. Луч лазера по своему поперечному сечению может иметь плавно изменяющуюся интенсивность, например представлять собой основную моду с гауссовым профилем интенсивности. Однако характеристика интенсивности может распадаться на более высокие поперечные моды и изменяться от импульса к импульсу. Это в первом приближении не оказывает влияния на предлагаемый способ, так как эта дополнительная модуляция интенсивности сокращается при корреляции спекл-картин в случае поступления одинакового лазерного импульса с различных расстояний. Остается только доля изменения спеклов на разностном отрезке как составная часть корреляции.
На фиг.3 показана лидарная система 300, в которой генерируется измерительный луч S, характеристика интенсивности которого статистически модулируется по его поперечному сечению с помощью пространственного модулятора 50 сразу после выхода из лидара. При этом лазер 10 направляет свет на микродисплей 51, управляемый генератором случайных изображений 52, чтобы вызвать статистическое модулирование лазерного луча S. Остальные обозначения на фиг.3 соответствуют обозначениям, принятым на фиг.1 и 2.
Аналогично приведенным выше на фиг.1 и 2 примерам осуществления изобретения определяется смещение изображения в модуляционных картинах отраженного лазерного луча и используется как мера отклонения луча в зонах турбулентности атмосферы. Как и в примерах на фиг.1 и 2, это позволяет по выбору регистрировать мгновенную турбулентность атмосферы или движение воздуха. Использование показанного на фиг.3 варианта исполнения особенно удобно в тех случаях, когда образование спеклов после прохождения света через зоны турбулентности не является выраженным, например, при использовании широкополосных лазеров с очень малой длиной когерентности (например, фемтосекундных лазеров), или протяженных в пространстве лазеров, например после прохождения луча через волоконные жгуты или рассеивающие экраны.
В представленных вариантах осуществления изобретения существуют различные возможности оптического расчета лидарной системы в отношении энергии импульсов, междуимпульсного интервала, диаметра испускаемого луча, расходимости пучка лазерного излучателя, диаметра апертуры и фокусного расстояния приемного телескопа, числа и диаметра пикселей камер. В качестве излучающего и приемного телескопов можно использовать также объективы с переменным фокусным расстоянием (вариообъективы).
Поскольку объекты измерения или отдельные вихри почти вращательно-симметричны, а вихревая пара является антисимметричной относительно оси, нет необходимости отображать сплошь всю площадь поперечного сечения обоих вихрей, достаточно отобразить лишь отдельные зоны поперечного сечения, например измерительные круги в определенном числе и определенного диаметра, что означает существенную экономию энергии лазерных импульсов.
Для этой цели в особом варианте осуществления изобретения предусмотрено деление измерительного луча на отдельные дискретные лучи посредством голографического расщепителя или пропускающей решетки 51, как показано на фиг.5, которая за счет дифракции расщепляет падающий лазерный луч на несколько одинаковых отдельных лучей без сколько-нибудь значительных общих потерь. Затем отдельные лучи рассеиваются или отражаются от атмосферного слоя V, образующего измеряемый объем. Как видно из фиг.6, вследствие расщепления луча на 4×3 отдельных лучей в общей сложности освещаются 64×48 пикселей в фокальной плоскости камеры, имеющей, например, общее число пикселей 640×480. При использовании в качестве приемного телескопа вариообъектива можно соответствующей настройкой получить иное отображение измерительных кругов в фокальной плоскости. Можно также менять голографический расщепитель 51 для получения иного числа измерительных кругов в зависимости от расстояния, на котором проводится измерение (расстояние измерения).
Предпосылкой осуществления изобретения является то, что интенсивность обратно рассеянного атмосферой светового сигнала расширенного импульсного лазерного луча должна быть достаточной для съемки камерой спеклов из определенного атмосферного слоя с определенного расстояния измерения. Это будет показано ниже.
Обратное рассеяние происходит на молекулах воздуха и частицах аэрозолей, причем для отображения спеклов важнее рассеяние молекулами из-за его непрерывности. Интенсивность молекулярного рассеяния возрастает с уменьшением длины волны пропорционально λ-4, аэрозольного рассеяния - пропорционально λ-1,3, т.е. выгоднее регистрировать рассеяние, используя как можно более короткие длины волн или в ультрафиолетовых лучах. Поскольку квантовая эффективность фотокатодов ПЗС-камер с предвключенным многоканальным усилителем сигнала изображения, пригодных для данного случая применения, весьма высока (30-40%), предлагается использовать лазерное излучение с длиной волны в ультрафиолетовом диапазоне от 230 нм до 400 нм. При современном уровне техники здесь речь может идти, например, об Nd:YAG-лазерах с учетверением или утроением частоты и с длиной волны 266 и 355 нм.
Другое преимущество длин волн менее 400 нм состоит в том, что здесь правилами безопасной эксплуатации лазеров допускается энергия импульсов, примерно в 10 раз превышающая энергию импульсов при длине волны больше 400 нм. В диапазоне длин волн примерно от 220 нм до 295 нм (диапазоне Хартлея) добавляется еще одно преимущество, состоящее в том, что солнечная радиация вследствие поглощения в озоновом слое на высоте 25-50 км снижается до едва заметного уровня, хотя пропускание атмосферы на протяжении нескольких сотен метров практически не ухудшается, что значительно облегчает измерение слабых лазерных сигналов при сильном солнечном фоне.
Число принятых фотонов обратного рассеяния Np в зависимости от числа излученных N0, объемного коэффициента обратного рассеяния β, коэффициента затухания α в атмосфере, расстояния z и площади А апертуры приемного телескопа, Т0 оптического пропускания лидарной системы, где с - скорость света, Т - продолжительность измерения, можно вычислить по известному уравнению лидара:
Np=N0(cT)βA/z2T0exp(-20fzαdz)
или число NE фотоэлектронов камеры, отнесенное к энергии импульса E0, N0=E0 (λ/hc), где h - постоянная Планка, λ - длина волны и Q - квантовая эффективность фотокатода, с помощью уравнения:
NE=E0(λ/hc)(cT)βA/z2Т0ехр(-20fzαdz)Q
Ниже приведены некоторые примеры исполнения и числовые примеры для области применения лидарной системы в смысле настоящего изобретения.
β=2,5×10-5 м-1 sr-1 - молекулярный объемный коэффициент обратного рассеяния атмосферы вблизи поверхности земли при λ=0,266 мкм
z=100 м - расстояние до измеряемого объема
A=3×10-2 м2 площадь апертуры приемного телескопа при диаметре апертуры D=20 см
Т=10 нс - продолжительность измерения при толщине слоя ст=3 м
Т0=0,4 - полное пропускание оптической системы
Q=0,3 - квантовая эффективность фотокатода
ехр.()=0,8 - пропускание атмосферы при расстоянии измерения до 100 м
E0=1 мДж
N=2×104 фотоэлектронов на 1 мДж энергии лазерного импульса
При числе пикселей 64×48 и энергии импульса 50 мДж на освещение одного элементарного пикселя изображения приходилось бы 325 фотоэлектронов, что вполне достаточно для среднего высвечивания пикселя. В других практических случаях значения могли бы значительно отличаться от принятых здесь.
В комбинации с быстро переключающимися и чувствительными камерами предпочтительно использовать лазер ультрафиолетового диапазона, а в некоторых случаях видимого диапазона. Для генерирования типичных лазерных импульсов длительностью 5-20 нс сегодня наиболее подходят твердотельные лазеры, в частности Nd:YAG-лазеры с основной длиной волны 1,064 мкм, излучением с удвоением частоты при 0,53 мкм в видимом диапазоне и излучением с учетверением частоты при 0,266 мкм в ультрафиолетовом диапазоне с соответствующим набором материалов фотокатода камеры, имеющихся на рынке. Двухимпульсные лазеры этого типа с непрерывным регулированием междуимпульсного интервала в пределах от 1 до 20 мс также имеются на рынке.
Измерение турбулентных полей у поверхности земли на ветровой электростанции и в аэропорту или с самолета в сочетании с управлением полетами обычно применяется при расстоянии измерения от 50 до 200 м. Требуемое расстояние измерения можно при 100 м принять как типичное, необходимое расширение лазерного луча для высвечивания площади составляет несколько градусов, осевая длина желаемого измеряемого объема - 3 м (в соответствии с длительностью измерения 10 нс), частота повторений импульсов лазера и кадровая частота камеры - 10-20 Гц. Необходимое разрешение измерения скорости в воздушном вихре находится в пределах 1 м/с, типичное разрешение изображения в VGA-формате или 640×480 пикселей при диаметре пикселя 10 мкм.
Излучающий телескоп для расширения лазерного луча и приемный телескоп для приема из атмосферы обратно рассеянного света применяются с параллельными оптическими осями, что является обычным для лидарных систем. Результаты численных расчетов и измерений показывают, что энергии импульса посылаемого луча 20-100 мДж на импульс в прозрачной атмосфере достаточно для обеспечения удовлетворительного отношения сигнал/шум в отраженном изображении, например, для числа пикселей 100×100.
Для достижения большего радиуса действия, например свыше 1000 м (увеличение расстояния со 100 до 1000 м означает стократное уменьшение интенсивности сигнала), можно, например, повысить энергию импульса или выбрать большую продолжительность измерения, т.е. толщину обратно рассеивающего слоя. Для увеличения радиуса действия можно также значительно сократить число освещаемых пикселей.
При линейном увеличении приемного телескопа 1:100 размер пикселя на расстоянии 100 м составляет 1 мм, а путь частицы при скорости 1 м/с от снимка до снимка при междуимпульсном интервале 1 мс составляет 1 м/с×10-3 с=1 мм или 1 пиксель в сравнении с величиной спекла 5 мм. Глубина резкости приемного телескопа с диаметром апертуры 20 см и фокусным расстоянием 1 м на расстоянии 100 м составляет около 20 м, что позволяет охватить зону осевого распространения всех типичных вихрей, чтобы затем регистрировать их без новой фокусировки телескопа и лишь со сдвигом во времени области приема камеры, в стационарном случае с разрешением по длине 3 м. Поскольку типичная скорость взлета и посадки самолета составляет 100 м/с, он успевает между двумя импульсами лазера и снимком камеры переместиться вперед примерно на 3 м. Здесь можно было бы обеспечить те же условия, что и в стационарном случае, но без сдвига во времени экспозиции камеры от импульса к импульсу.
Общим для всех предлагаемых здесь способов измерения является то, что при каждом измерении регистрируются поверхностные изменения состояния определенного измеряемого объема в различные моменты времени. Это не создает особых проблем в случае стационарных лидарных систем. Ведь в этом случае место измерения при постоянном времени прохождения импульса остается неизменным, а интервал между двумя снимками можно устанавливать путем использования двойных импульсов с регулируемым междуимпульсным интервалом. Поскольку лидарная система в самолете сама находится в движении, необходимо принять меры, чтобы, несмотря на разницу во времени между снимками, регистрировался один и тот же измеряемый объем и чтобы, несмотря на собственное движение самолета, его возможное влияние на отдельное измерение оставалось минимальным.
В особом варианте осуществления изобретения предлагается способ регистрации и измерения турбулентностей атмосферы с помощью лидарной системы, при осуществлении которого в направлении интересующей области пространства посылают расширенный импульсный лазерный луч с заданной длиной волны и принимают обратно рассеянный свет из интересующей области пространства, причем для определения движения воздуха с помощью камер после определенного времени прохождения лазерного луча в атмосфере по определенному времени экспозиции камер регистрируют и анализируют распределение интенсивности в поперечном сечении лазерного луча.
В предпочтительном варианте распределение интенсивности анализируют за счет распада первоначально невозмущенного лазерного луча на спеклы в зонах турбулентности атмосферы.
Предпочтительно анализируют лазерный луч, распределение интенсивности которого предварительно модулируется в лидаре и который дополнительно подвергается влиянию турбулентностей атмосферы.
Реферат
Изобретение относится к измерениям турбулентностей атмосферы с помощью лидарной системы, в частности на борту летательных аппаратов. В направлении интересующей области пространства посылают расширенный импульсный лазерный луч (12) с заданной длиной волны и принимают обратно рассеянный свет из интересующей области пространства, причем в первый момент времени t1 и во второй момент времени t2 после посылки лазерного импульса (L) измеряют распределение интенсивности в поперечном сечении потока обратно рассеянного света и на основании сравнения двух распределений интенсивности определяют турбулентность атмосферы в поле измерений, определяемом моментами времени t1 и t2. При этом с помощью камер (21, 22) получают снимки спекл-картин. Блок (30) обработки данных устанавливает взаимную корреляцию снимков для визуализации турбулентности и отображения ее на мониторе (35). Изобретение позволяет обнаруживать неоднородности и движения воздуха на большой площади. 3 н. и 19 з.п. ф-лы, 6 ил.
Формула
детектор (21, 22) для измерения распределения интенсивности в поперечном сечении потока обратно рассеянного света из интересующей области пространства в первый момент времени t1 и во второй момент времени t2 после посылки лазерного импульса (L), причем моменты времени t1 и t2 определяют поле измерений,
блок (25) синхронизации, сопрягающий детектор (21, 22) с лазером (10) для инициирования измерений в моменты времени t1 и t2,
блок (30; 31, 32, 33) обработки данных, который на основании сравнения измеренных распределений интенсивности определяет турбулентность атмосферы, причем детектор (21, 22) выполнен с возможностью определения положения спеклов, возникающих при обратном рассеянии лазерного импульса (L) на молекулах воздуха, а блок (30; 31, 32, 33) обработки данных выполнен с возможностью сравнения спекл-картин для определения турбулентности атмосферы на основании результатов их сравнения.
Комментарии