Робот - RU2698660C2
Код документа: RU2698660C2
Чертежи









Описание
[001] Эта заявка на изобретение испрашивает приоритет по заявке с номером 104116923, поданной 27.05.2015 г. в Тайвани (КНР), согласно 35 USC 119, все содержание которой включается сюда в виде ссылок.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
[002] Настоящее изобретение относится к роботу, а конкретнее, к очистительному устройству, способному чистить поверхность листового изделия.
Предшествующий уровень техники
[003] Традиционно двери и окна зданий чистят после того как двери и окна были открыты или демонтированы; в то время как двери и окна зданий чистятся рабочими клининговой компании, рама открыта наружу, при этом двигатель управляет висящей рамой для подъема и опускания, а для чистки дверей и окон снаружи здания применяется щетка или струя воды. Однако, при дующем ветре возникает тенденция к раскачиванию висящей рамы вследствие нестабильного центра тяжести. Для предотвращения чрезмерного натирания окон и дверей (избыточная сила при натирании щеткой может послужить причиной поскальзывания рабочих или опасности несчастного случая от падения чистящих инструментов и травмирования людей) окна и двери могут быть лишь слегка отмыты и не могут быть полностью очищены.
[004] На ФИГ. 1 схематично показан обычный адсорбционный робот, раскрытый в патенте Китая под номером CN 203662679 U. Как показано на ФИГ. 1, адсорбционный робот А включает корпус 100 робота, на котором расположены блок 200 адсорбции, блок 300 перемещения, функциональный блок 400 и блок 500 управления. Блок 200 адсорбции в основном включает присоску и соединенный с ней эксгаустер. Блок 300 перемещения расположен за пределами пространства, определяемого присоской блока 200 адсорбции. Эксгаустер высасывает воздух из присоски, формируя отрицательное давление внутри присоски, таким образом присоска присасывается к обрабатываемой поверхности. Под управлением блока управления адсорбционный робот А посредством блока перемещения перемещается по обрабатываемой поверхности. На функциональном блоке 400 расположена чистящая ткань, предназначенная для вытирания обрабатываемой поверхности. На потоковом входе эксгаустера расположен датчик 600 потока. Блок управления получает информацию о потоке, детектируемую датчиком потока, и определяет, в каком состоянии находится присоска - вакуумном или разгерметизации.
[005] На ФИГ. 2 схематично показан другой обычный робот. Обычный робот В на ФИГ. 2 по существу такой же, как и обычный робот А на ФИГ. 1, за исключением той разницы, что блок 300 перемещения расположен внутри пространства, определяемого присоской блока 200 адсорбции. А конкретнее, чистящая ткань 271 для вытирания прикреплена к контактной поверхности каждой кромки рамы блока 200 адсорбции, а блок 300 перемещения расположен внутри рамы. При перемещении блока 300 перемещения чистящая ткань может вытирать поверхность окна.
[006] Тем не менее, согласно уровню техники, когда блок 300 перемещения перемещается по преграде, каждый из роботов А и В целиком наклоняется или приподнимается, вызывая тем самым разгерметизацию замкнутого пространства, так что роботы А и В не могут присосаться к обрабатываемой поверхности. К тому же, когда отношение силы воздействия блока перемещения к силе воздействия функционального блока становится неприемлемым, у робота возникает тенденция к пробуксовке, и он не может перемещаться вперед, или сила воздействия функционального блока слишком мала для чистки обрабатываемой поверхности.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[007] Согласно одному варианту осуществления настоящего изобретения предусматривается робот, приспособленный к передвижению по поверхности листового изделия. Робот включает корпус, по меньшей мере одно устройство перемещения, присоску и насосный узел. По меньшей мере одно устройство перемещения, расположенное в корпусе, предназначено для передвижения робота по поверхности листового изделия. Присоска расположена в корпусе. Насосный узел расположен в корпусе. Присоска может передвигаться относительно корпуса. Во время функционирования робота корпус, присоска и листовое изделие образуют замкнутое пространство. В замкнутом пространстве с помощью насосного узла поддерживается отрицательное давление.
[008] В одном варианте осуществления изобретения площадь первой области пространства, определяемого присоской, больше площади второй области пространства, определяемого корпусом.
[009] В одном варианте осуществления изобретения сила воздействия, вызываемая отрицательным давлением замкнутого пространства, распределяется по меньшей мере на одно устройство перемещения и присоску по существу в соответствии с отношением площади второй области к площади области, оставшейся от площади первой области за пределами площади второй области. В этом варианте осуществления изобретения соотношение площадей (т.е. отношение силы воздействия блока перемещения к силе воздействия функционального блока) на присоске может быть взято таким, чтобы нивелировать технологический допуск или созданное преградой нежелательное распределение силы воздействия, являющееся причиной неэффективного функционирования робота.
[0010] В одном варианте осуществления изобретения присоска изготовлена с несколькими сквозными отверстиями, и в сквозные отверстия вставлены стержни таким образом, что присоска подвижно закреплена на корпусе и может передвигаться вдоль продольных осей стержней.
[0011] В одном варианте осуществления изобретения длина стержня больше толщины части присоски, ограничивающей сквозное отверстие.
[0012] В одном варианте осуществления изобретения продольные оси стержней по существу параллельны перпендикуляру к контактной поверхности присоски, так что присоска может передвигаться вдоль перпендикуляра к контактной поверхности присоски.
[0013] В одном варианте осуществления изобретения робот является очистительным устройством. Предпочтительно робот дополнительно включает чистящую ткань, прикрепленную к контактной поверхности присоски.
[0014] В одном варианте осуществления изобретения робот дополнительно включает по меньшей мере один эластичный элемент, расположенный между присоской и корпусом, при этом силы упругости эластичных элементов держат присоску в тесном контакте с поверхностью листового изделия. Предпочтительно площадь первой области пространства, определяемого присоской, по существу равна площади второй области пространства, определяемого корпусом.
[0015] В одном варианте осуществления изобретения корпус робота дополнительно отличается камерой, соединенной с замкнутым пространством, и робот дополнительно включает пневматический датчик, расположенный в камере и предназначенный для определения пневматического давления замкнутого пространства.
[0016] В одном варианте осуществления изобретения робот дополнительно включает по меньшей мере один кромкоискатель, который расположен на боковой поверхности или нижней поверхности корпуса и предназначен для определения кромки листового изделия.
[0017] Согласно одному варианту осуществления настоящего изобретения присоска расположена таким образом, что она может двигаться относительно корпуса. Так, когда по меньшей мере одно устройство перемещения перемещается по преграде, присоска сдвигается относительно корпуса и может находиться в тесном контакте с листовым изделием для сохранения герметически закрытого состояния замкнутого пространства, определяемого листовым изделием, корпусом и присоской и, следовательно, для предотвращения разгерметизации замкнутого пространства.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0018] На ФИГ. 1 схематично показан обычный адсорбционный робот.
[0019] На ФИГ. 2 схематично показан другой обычный робот.
[0020] На ФИГ. 3А показан вид сверху очистительного устройства согласно одному варианту осуществления настоящего изобретения.
[0021] На ФИГ. 3В показан вид снизу очистительного устройства согласно этому варианту осуществления настоящего изобретения.
[0022] На ФИГ. 3С показан вид слева очистительного устройства согласно этому варианту осуществления настоящего изобретения.
[0023] На ФИГ. 3D показан вид спереди очистительного устройства согласно этому варианту осуществления настоящего изобретения.
[0024] ФИГ. 4А − это функциональная блок-схема, показывающая очистительное устройство согласно этому варианту осуществления настоящего изобретения.
[0025] ФИГ. 4В − это функциональная блок-схема, показывающая очистительное устройство согласно этому варианту осуществления настоящего изобретения.
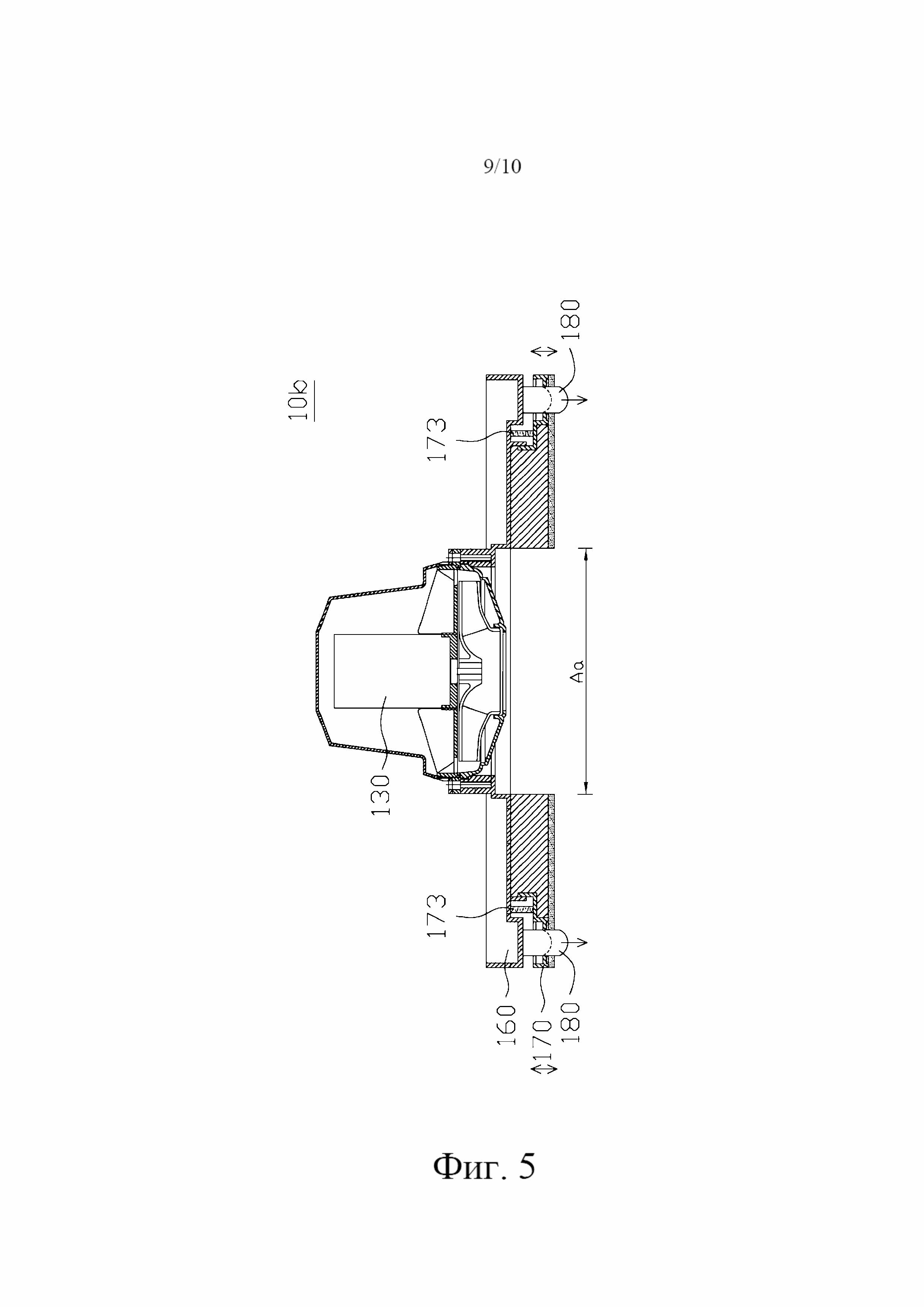
[0026] На ФИГ. 5 показан вид спереди очистительного устройства согласно другому варианту осуществления настоящего изобретения.
[0027] На ФИГ. 6 показан вид спереди очистительного устройства согласно другому варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0028] Настоящее изобретение относится к роботу, приспособленному к передвижению по поверхности листового изделия. Робот может быть игрушкой, машиной на радиоуправлении, очистительным устройством, очистительным устройством для окон или чем-то подобным. В нижеследующем в качестве примера описано очистительное устройство или очистительное устройство для окон. Однако, настоящее изобретение этим не ограничивается.
[0029] На ФИГ. 3А показан вид сверху очистительного устройства согласно одному варианту осуществления настоящего изобретения. На ФИГ. 3В показан вид снизу очистительного устройства согласно этому варианту осуществления настоящего изобретения. На ФИГ. 3С показан вид слева очистительного устройства согласно этому варианту осуществления настоящего изобретения. На ФИГ. 3D показан вид спереди очистительного устройства согласно этому варианту осуществления настоящего изобретения.
[0030] Обратимся к ФИГ. 3A − 3D, очистительное устройство 10a может быть прикреплено к листовому изделию (не показано) и передвигаться по листовому изделию для очистки от пыли на поверхности листового изделия. Листовым изделием может быть, например, вертикальное окно. Очистительное устройство 10a включает устройства 111 и 112 перемещения, корпус 160, присоску 170 и насосный узел 130 (см. ФИГ. 4). Как показано на ФИГ. 3В и 3С, корпус 160 и присоска 170 совместно определяют пространство, а насосный узел 130 сообщается с этим пространством. Во время функционирования очистительное устройство 10а располагается на листовом изделии, и насосный узел 130 выкачивает воздух из замкнутого пространства, определяемого листовым изделием, корпусом 160 и присоской 170, при этом в замкнутом пространстве поддерживается отрицательное давление для того, чтобы очистительное устройство 10а присасывалось к поверхности листового изделия. Устройствами 111 и 112 перемещения могут быть подвижные или скользящие элементы, такие как шкивы, ролики или тому подобное. Кроме того, после приведения в движение устройств 111 и 112 перемещения очистительное устройство 10а может передвигаться по поверхности листового изделия.
[0031] Как показано на ФИГ. 3С, присоска 170 расположена так, что она может передвигаться относительно корпуса 160. Снова, но более подробно, рассмотрим ФИГ. 3А, где видно, что присоска 170 изготовлена с несколькими сквозными отверстиями, при этом несколько стержней 172 вставлены в сквозные отверстия, а длина стержня 172 больше толщины части присоски 170, ограничивающей сквозное отверстие, так что присоска 170 может передвигаться вдоль продольных осей стержней 172, и присоска 170 может быть подвижно закреплена на корпусе 160 посредством нескольких стержней 172. Предпочтительно продольные оси стержней 172 по существу параллельны перпендикуляру к контактной поверхности присоски 170, так что присоска 170 может передвигаться вдоль перпендикуляра к контактной поверхности присоски 170. То есть продольные оси стержней 172 по существу параллельны перпендикуляру к поверхности листового изделия, так что присоска 170 может передвигаться вдоль перпендикуляра к поверхности листового изделия.
[0032] В предшествующем уровне техники блок 300 перемещения не имеет эластичности и для работы ему необходима эластичность присоски блока 200 адсорбции для того, чтобы замкнутое пространство образовывало герметически закрытое состояние. Тем не менее, существуют следующие недостатки формирования герметически закрытого состояния в соответствии с эластичностью присоски. Когда блок 300 перемещения сталкивается с преградой, робот А или В целиком приподнимается, потому что блок 300 перемещения не имеет эластичности, вызывая тем самым разгерметизацию замкнутого пространства.
[0033] По сравнению с уровнем техники присоска 170 этого варианта осуществления изобретения расположена так, что она может передвигаться относительно корпуса 160. Так, когда устройства 111 и 112 перемещения перемещаются по преграде, присоска 170 сдвигается относительно корпуса 160 таким образом, что она может находиться в тесном контакте с листовым изделием для сохранения герметически закрытого состояния замкнутого пространства, определяемого листовым изделием, корпусом 160 и присоской 170, тем самым предотвращая разгерметизацию замкнутого пространства. Как вариант, когда присоска 170 прижимается к преграде, корпус очистительного устройства 10а по-прежнему может передвигаться относительно присоски 170 и не может приподниматься. Таким образом, отрицательное давление замкнутого пространства по-прежнему может прикладывать силу воздействия к корпусу 160.
[0034] Как показано на ФИГ. 3В и 3С, в одном варианте осуществления изобретения устройства 111 и 112 перемещения расположены за пределами замкнутого пространства. Кроме того, площадь первой области Аа пространства, определяемого присоской 170, больше площади второй области Aw пространства, определяемого корпусом 160, а площадь первой области Аа за вычетом площади второй области Aw равна площади оставшейся области Ас. Оставшаяся область Ас является областью первой области Аа за пределами второй области Aw. Так как первая область Аа и вторая область Aw связаны друг с другом, первая область Аа является пространством, определяемым присоской 170, а вторая область Aw определена корпусом 160, сила воздействия, вызываемая отрицательным давлением всего замкнутого пространства, распределяется на устройства 111 и 112 перемещения и присоску 170 по существу в соответствии с отношением площади второй области Aw к площади оставшейся области Ас.
[0035] По сравнению с предыдущим уровнем техники замкнутое пространство цельно и не может быть разделено. Так, очень сложно четко распределять силу воздействия на блок 300 перемещения и силу воздействия на присоску блока 200 адсорбции, при этом две силы воздействия обусловлены отрицательным давлением замкнутого пространства. Результаты, получаемые в связи с этим, по существу включают следующие типы. Если сила воздействия на блок 300 перемещения больше, то сила воздействия на присоску блока 200 адсорбции будет меньше, вызывая в связи с этим проблему отсутствия результатов чистки. Если сила воздействия на блок 300 перемещения в дальнейшем возрастет, то сила воздействия на присоску блока 200 адсорбции в дальнейшем снизится. Таким образом, робот А или В в дальнейшем не сможет присосаться к вертикальной поверхности, и робот А или В упадет. Если в дальнейшем робот столкнется с преградой, то робот А или В целиком приподнимется, что приведет к разгерметизации замкнутого пространства и падению робота А или В. Если сила воздействия на блок 300 перемещения маленькая, то сила воздействия на присоску блока 200 адсорбции будет большой, вызывая в связи с этим проблему, при которой блок 300 перемещения будет пробуксовывать, и робот А или В не сможет перемещаться. А конкретнее, когда 80% силы воздействия, вызываемой отрицательным давлением замкнутого пространства, приходится на присоску блока 200 адсорбции, блок 300 перемещения пробуксовывает, и робот А или В не может перемещаться.
[0036] Согласно прототипам, изображенным на ФИГ. 1 и 2, отрицательное давление замкнутого пространства, определяемого присоской, присасывает робота А или В к обрабатываемой поверхности. Таким образом, блок 300 перемещения обычного робота А или В и присоска блока 200 адсорбции составляют единое целое и не могут быть разделены, и такое расположение, при котором вызывается сила воздействия отрицательного давления, не может быть распределено. Когда блок 300 перемещения перемещается по преграде, роботы А и В целиком наклоняются или приподнимаются, вызывая тем самым разгерметизацию замкнутого пространства, и роботы А и В не могут присосаться к обрабатываемой поверхности.
[0037] В отличии от этого, согласно разработанной структуре этого варианта осуществления изобретения силы воздействия на устройства 111 и 112 перемещения по существу являются отрицательным давлением, вызываемым второй областью Aw, а сила воздействия на присоску 170 является отрицательным давлением, вызываемым оставшейся областью Ас. Таким образом, силы воздействия на устройства 111 и 112 перемещения и сила воздействия на присоску 170 могут сохраняться постоянными. Когда устройства 111 и 112 перемещения перемещаются по преграде, тем не менее существует заранее заданная сила, прикладывающаяся к присоске 170, для предотвращения разгерметизации замкнутого пространства, так что благодаря заранее заданной силе очистительное устройство 10а присасывается к обрабатываемой поверхности.
[0038] В одном варианте осуществления изобретения присоска 170 дополнительно может включать чистящую ткань 171, прикрепленную к контактной поверхности присоски 170. Чистящая ткань 171 является эластичной. Когда в замкнутом пространстве сохраняется отрицательное давление, а атмосферное давление вызывает силу воздействия, приложенную к очистительному устройству 10а для придавливания очистительного устройства 10а к листовому изделию, эластичность чистящей ткани 171 сохраняет герметически закрытое состояние замкнутого пространства.
[0039] Снова обратимся к ФИГ. 3А, где видно, что в одном варианте осуществления изобретения очистительное устройство 10а дополнительно включает несколько кромкоискателей 180, выступающих за четырехстороннюю поверхность корпуса 160 соответственно. Когда очистительное устройство перемещается к кромке окна, кромкоискатель 180 при соприкосновении с кромкой окна нажимается и втягивается внутрь. В это время система 140 управления (будет описана ниже) детектирует сигнал, полученный от кромкоискателя 180, немедленно останавливает движение вперед очистительного устройства 10а и разрешает очистительному устройству 10а сделать поворот или двинуться в обратном направлении. Как показано на ФИГ. 5 (будет описана ниже), кромкоискатель 181 очистительного устройства 10а в одном варианте осуществления изобретения также может быть расположен на нижней поверхности корпуса 160. В работающем состоянии кромкоискатель 181 втянут в нижнюю поверхность корпуса 160 и прижимается к поверхности окна. Когда кромкоискатель 181 достигает кромки окна, кромкоискатель 181 не может быть прижат к поверхности. Поэтому кромкоискатель 181 принимает выступающее положение и передает сигнал на систему 140 управления, которая немедленно останавливает движение вперед очистительного устройства 10а и разрешает очистительному устройству 10а сделать поворот или двинуться в обратном направлении.
[0040] ФИГ. 4А − это функциональная блок-схема, показывающая очистительное устройство согласно варианту осуществления настоящего изобретения. Как показано на ФИГ. 4А, очистительное устройство 10а в этом варианте осуществления изобретения дополнительно включает приводной узел 120, систему 140 управления и блок 190 питания. Блок 190 питания, электрически соединенный с насосным узлом 130, приводным узлом 120 и системой 140 управления, обеспечивает электропитанием насосный узел 130, приводной узел 120 и систему 140 управления. В одном варианте осуществления изобретения блок 190 питания может включать батарейный блок и дополнительно включать блок датчика заряда батареи (не показано). Когда заряд батареи очистительного устройства 10а недостаточен, блок датчика заряда батареи производит предупреждающий звуковой сигнал, предупреждающий световой сигнал или какой-либо подобный. В это время пользователь получает информационное предупреждение о том, что необходимо удалить очистительное устройство 10а с листового изделия. В одном варианте осуществления изобретения очистительное устройство 10а может включать силовой кабель для электрического соединения с разъемом. В этом варианте осуществления изобретения электропитание обычно подается с помощью силового кабеля. Когда электропитание отключено, блок 190 питания может служить в качестве резервного источника питания и одновременно производить предупреждающий звуковой сигнал, предупреждающий световой сигнал или какой-либо подобный. Система 140 управления сопряжена с насосным узлом 130 и приводным узлом 120. Приводной узел 120 получает управляющий сигнал системы 140 управления для приведения во вращение устройств 111 и 112 перемещения таким образом, чтобы вращающееся устройство 111 перемещения или устройство 112 перемещения переместилось.
[0041] ФИГ. 4В − это функциональная блок-схема, показывающая очистительное устройство согласно варианту осуществления настоящего изобретения. Ссылаясь на ФИГ. 4В, система 140 управления включает блок 410 обработки и считывающий элемент 420. Блок 410 обработки управляет приводным узлом 120 для приведения в движение устройств 111 и 112 перемещения. Блок 410 обработки управляет насосным узлом 130 для управления отрицательным давлением замкнутого пространства.
[0042] В одном варианте осуществления изобретения система 140 управления может дополнительно включать приемник 441 дистанционного управления (ДУ). Приемник 441 дистанционного управления получает сигнал Sw дистанционного управления от источника 442 сигнала дистанционного управления, таким образом система 140 управления управляет траекторией перемещения очистительного устройства 10а в соответствии с сигналом Sw дистанционного управления. Передачей сигнала между приемником 441 дистанционного управления и источником 442 сигнала дистанционного управления может быть, например, инфракрасная передача или беспроводная передача, при этом беспроводной передачей может быть, например, ZigBee, bluetooth, RFIO, Wi-Fi или подобная.
[0043] Функции дистанционного управления очистительного устройства 10а включают, например, функцию сброса системы в исходное состояние, функцию автоматического возврата домой, функцию полного запуска, функцию запуска с места и функцию ручного режима, которые будут описаны ниже. Функция автоматического возврата домой представляет собой автоматическое движение очистительного устройства 10а к местоположению, где пользователь может легко взять очистительное устройство 10а после чистки. Местоположение, например, может находиться ниже середины листового изделия. Функция полного запуска представляет собой запуск очистительного устройства 10 от верхнего края, после того как очистительное устройство 10а переместится к верхнему краю, для выполнения чистки слева направо (или справа налево), а затем сверху вниз. Функция запуска с места представляет собой запуск очистительного устройства с текущего места для выполнения чистки слева направо (или справа налево), а затем сверху вниз. Функция ручного режима включает функции управления чисткой с места очистительного устройства или управления передвижением очистительного устройства 10а вверх, вниз, влево и вправо.
[0044] В одном варианте осуществления изобретения очистительное устройство 10а имеет функцию обнаружения кромок окон и дверей. Как показано на ФИГ. 4В, считывающий элемент 420 может включать кромкоискатель 421 и аналого-цифровой преобразователь 423. Аналого-цифровой преобразователь 423 включен между кромкоискателем 421 и блоком 410 обработки. Кромкоискатель 421 может обнаруживать кромку листового изделия или посторонний предмет на листовом изделии. Кромкоискателем 421 может быть аналоговый датчик и может быть датчик расстояния, такой как инфракрасный, лазерный, ультразвуковой датчик или подобный. Кроме того, кромкоискателем также может быть, например, концевой выключатель или бесконтактный выключатель. Система 140 управления может считывать значение кромкоискателя 421 при помощи аналого-цифрового преобразователя 423 и таким образом определять расстояние между очистительным устройством и кромкой листового изделия. В частности, если листовое изделие является листом из стекла без дверной или оконной рамы, и когда значение датчика находится ниже нижнего порогового значения, она интерпретирует это так: на данный момент не получено никакого значения датчика, отраженного от стекла (т.е., очистительное устройство 10а в данный момент достигло кромки стекла). С другой стороны, если листовое изделие является листом из стекла без дверной или оконной рамы, установленной на кромке, и когда значение датчика находится выше наивысшего порогового значения (заранее заданного значения), то она интерпретирует это так: на данный момент очистительное устройство 10а достигло дверной или оконной рамы, и получено отраженное значение датчика с более высокой интенсивностью.
[0045] В одном варианте осуществления изобретения считывающий элемент 420 может включать цифровой датчик 424 и цифровой вход 425. Цифровой датчик 424 определяет раму окна или двери с помощью метода, использующего механизм касания кромки окна или двери. К примеру, цифровым датчиком 424 является концевой выключатель или бесконтактный выключатель. Цифровым входом 425 может быть кнопочный ввод или вход цифрового датчика 424.
[0046] Кроме того, в одном варианте осуществления изобретения объект распределения силы воздействия отрицательного давления замкнутого пространства также может быть достигнут без использования исполнения, в котором площадь Аа первой области пространства, определяемого присоской 170, больше площади Aw второй области пространства, определяемого корпусом 160. На ФИГ. 5 показан вид спереди очистительного устройства согласно другому варианту осуществления настоящего изобретения. Как показано на ФИГ. 5, площадь Аа области пространства, определяемого присоской 170, по существу такая же, как и площадь Аа области пространства, определяемого корпусом 160. Кроме того, по меньшей мере один эластичный элемент 173 дополнительно расположен между присоской 170 и корпусом 160, и силы упругости эластичных элементов 173 держат присоску в тесном контакте с поверхностью листового изделия. Согласно разработанной структуре этого варианта осуществления изобретения, когда устройства 111 и 112 перемещения перемещаются по или к преграде, силы упругости эластичных элементов 173 прикладываются к присоске 170 для предотвращения разгерметизации замкнутого пространства. Таким образом, очистительное устройство 10а присасывается к обрабатываемой поверхности совокупностью силы воздействия отрицательного давления и сил упругости эластичных элементов 173.
[0047] На ФИГ. 6 показан вид спереди очистительного устройства согласно другому варианту осуществления настоящего изобретения. Ссылаясь на ФИГ. 6, корпус 160 дополнительно отличается камерой 162, соединенной с замкнутым пространством, определяемым корпусом 160 и присоской 170. Как показано на ФИГ. 6 и 4В, система 140 управления дополнительно включает пневматический датчик 430. Пневматический датчик 430 регулярно или нерегулярно детектирует давление замкнутого пространства, определяемого корпусом 160 и присоской 170, и передает сигнал на систему 140 управления для наблюдения за давлением замкнутого пространства, детектируемым пневматическим датчиком 430. Когда давление замкнутого пространства понижается до заранее заданного значения или понижается с заранее заданной скоростью, система 140 управления немедленно останавливает движение вперед очистительного устройства 10а и возвращает его в исходное положение или двигает вперед или назад до тех пор, пока давление замкнутого пространства не возвратится к нормальному состоянию.
[0048] В одном варианте осуществления изобретения пневматическим датчиком 430 может быть пьезоэлектрический преобразователь, содержащий пьезоэлектрик, способный создавать пьезоэффект, который означает, что когда к его поверхности прикладывается давление, то генерируется напряжение, а величина давления может быть определена согласно свойству кристалла, обеспечивающего создаваемое напряжение. В одном варианте осуществления изобретения пневматическим датчиком 430 может служить датчик давления, который является пьезорезистивным мостом на поверхности кремниевого чипа. Тыльная сторона чипа просверлена и, следовательно, между тыльной стороной и внутренностью чипа сформирована мембрана давления. Диапазон давлений определяется в соответствии с толщиной мембраны. Когда к чипу прикладывается давление, мембрана деформируется таким образом, что значение сопротивления моста изменяется в соответствии с коэффициентом давления.
[0049] Согласно уровню техники датчик 600 потока расположен у потокового входа эксгаустера. Так как поток потокового входа эксгаустера детектируется большей его частью, время для оценки разгерметизации в соответствии с изменением потока больше времени разгерметизации. Когда величина разгерметизации велика, робот не может сразу же среагировать и поэтому срывается с окна вниз. По сравнению с уровнем техники в этом варианте осуществления изобретения давление замкнутого пространства может быть определено сразу, и направление перемещения может быть сразу же скорректировано для предотвращения падения робота с окна.
[0050] Согласно одному варианту осуществления настоящего изобретения присоска 170 расположена таким образом, что она может двигаться относительно корпуса 160. Так, когда устройства 111 и 112 перемещения перемещаются по преграде, присоска 170, сдвинувшись относительно корпуса 160, может находиться в тесном контакте с листовым изделием для сохранения герметически закрытого состояния замкнутого пространства, определяемого листовым изделием, корпусом 160 и присоской 170, и разгерметизации замкнутого пространства можно избежать. В одном варианте осуществления изобретения площадь первой области Аа пространства, определяемого присоской 170, дополнительно больше площади второй области Aw пространства, определяемого корпусом 160, сила воздействия отрицательного давления на устройства 111 и 112 перемещения и сила воздействия на присоску 170 распределяются в соответствии с отношением площади второй области Aw к площади оставшейся области Ас. В одном варианте осуществления изобретения между присоской 170 и корпусом 160 дополнительно расположен по меньшей мере один эластичный элемент 173. Согласно структуре этого варианта осуществления изобретения, когда устройства 111 и 112 перемещения перемещаются по преграде, силы упругости эластичных элементов 173 прикладываются к присоске 170 для предотвращения разгерметизации замкнутого пространства. Таким образом, очистительное устройство 10а присасывается к обрабатываемой поверхности совокупностью силы воздействия отрицательного давления и сил упругости эластичных элементов 173.
Реферат
Изобретение относится к роботу, приспособленному для передвижения по поверхности листового изделия. Робот содержит корпус (160), по меньшей мере одно устройство перемещения (111), (112), расположенное в корпусе для передвижения робота по поверхности листового изделия, присоску (170) и насосный узел (130), расположенный в корпусе (160). Присоска (170) выполнена с возможностью перемещения относительно корпуса (160) вдоль перпендикуляра к контактной поверхности присоски. Во время работы робота корпус (160), присоска (170) и листовое изделие образуют замкнутое пространство, в котором при помощи насосного узла (130) поддерживается отрицательное давление. Технический результат заключается в предотвращении разгерметизации замкнутого пространства и повышении надежности крепления робота при движении по обрабатываемой поверхности. 9 з.п. ф-лы, 10 ил.
Комментарии