Система и способ оценки воздушной скорости летательного аппарата на основании модели лобового сопротивления - RU2756243C2
Код документа: RU2756243C2
Чертежи









Описание
УРОВЕНЬ ТЕХНИКИ
Предложенные система и способ относятся к системе оценки воздушной скорости летательного аппарата, в частности к системе, включающей модель оценки воздушной скорости, в особенности в режиме полета летательного аппарата на высоких скоростях.
Трубка Пито или приемник воздушного давления обычно установлены на транспортном средстве и измеряют его скорость относительно текучей среды, в которой это транспортное средство совершает перемещение. В одной из областей применения приемник воздушного давления может быть установлен на летательный аппарат для измерения его скорости относительно воздушной массы во время полета. Приемники воздушного давления обычно содержат полую трубку, задающую открытый конец, ориентированный по направлению потока текущей среды или движения транспортного средства. В случае летательного аппарата полая трубка приемника воздушного давления содержит текучую среду, такую как воздух. Давление в приемнике воздушного давления обеспечивает возможность измерения давления торможения, также называемого полным давлением. Полное давление объединяют со статическим давлением, которое обычно измеряют в другом месте на фюзеляже летательного аппарата или на стороне приемника воздушного давления в случае комбинированного приемника воздушного давления, для определения давления ударной нагрузки. Давление ударной нагрузки используют для определения воздушной скорости летательного аппарата.
Иногда системы расчета воздушной скорости, основанные на приемнике воздушного давления, могут выдавать неточное показание воздушной скорости. Неточность показания может быть вызвана такими проблемами, как загрязнение приемника воздушного давления, повреждение приемника воздушного давления или проблемами технического обеспечения. Некоторыми примерами загрязнения приемника воздушного давления являются, без ограничения, лед, вулканический пепел и насекомые. В настоящее время известные системы оценивают воздушная скорость на основании модели летательного аппарата, однако эти системы могут и не быть выполнены с возможностью надежного расчета точной воздушной скорости во время рабочих режимов некоторых типов. В частности, эти системы могут и не быть выполнены с возможностью точного расчета воздушной скорости во время высокоскоростных режимов полета, в особенности при околозвуковых числах Маха. Кроме того, воздушная скорость, рассчитанная такой системой, может быть чувствительна к изменениям измеряемого угла атаки летательного аппарата. В итоге, воздушная скорость также может быть чувствительна к любым неточностям в модели подъемной силы, даже в режимах, в которых можно точно рассчитать воздушная скорость.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на улучшенную систему оценки воздушной скорости летательного аппарата, в особенности во время высокоскоростных режимов работы. Летательный аппарат работает в высокоскоростном режиме, в котором закрылки летательного аппарата убраны, при этом летательный аппарат совершает перемещение при числе Маха, равном или большем приблизительно 0,4.
В одном из примеров предложена система оценки множества параметров воздушной скорости летательного аппарата. Система содержит один или более процессоров и память, соединенную с процессором. Память, хранящая данные, содержит базу данных и программный код, который, при его исполнении указанными одним или более процессорами, вызывает то, что система принимает множество рабочих параметров, каждый из которых представляет рабочий режим летательного аппарата. Система дополнительно выполнена с возможностью определения коэффициента лобового сопротивления по оси полусвязанной системы координат на основании множества рабочих параметров. Коэффициент лобового сопротивления по оси полусвязанной системы координат количественно определяет силу сопротивления по оси полусвязанной системы координат летательного аппарата, создаваемую в высокоскоростном режиме. Система выполнена с возможностью определения коэффициента подъемной силы по оси связанной системы координат на основании множества рабочих параметров. Коэффициент подъемной силы по оси связанной системы координат соответствует подъемной силе летательного аппарата вдоль вертикальной оси связанной системы координат, создаваемой в низкоскоростном режиме. Кроме того, система выполнена с возможностью определения динамического давления на основании одного из коэффициента лобового сопротивления по оси полусвязанной системы координат и коэффициента подъемной силы по оси связанной системы координат. Кроме того, система выполнена с возможностью оценки множества параметров воздушной скорости на основании динамического давления.
Еще в одном примере предложен способ оценки множества параметров воздушной скорости летательного аппарата. Способ включает прием, посредством компьютера, множества рабочих параметров, каждый из которых представляет рабочий режим летательного аппарата. Кроме того, способ включает определение, посредством компьютера, коэффициента лобового сопротивления по оси полусвязанной системы координат на основании множества рабочих параметров. Коэффициент лобового сопротивления по оси полусвязанной системы координат количественно определяет силу сопротивления по оси полусвязанной системы координат летательного аппарата, созданное в высокоскоростном режиме. Кроме того, способ включает определение коэффициента подъемной силы по оси связанной системы координат на основании множества рабочих параметров, при этом коэффициент подъемной силы по оси связанной системы координат соответствует подъемной силе летательного аппарата вдоль вертикальной оси связанной системы координат, создаваемой в низкоскоростном режиме. Способ включает определение динамического давления на основании одного из коэффициента лобового сопротивления по оси полусвязанной системы координат и коэффициента подъемной силы по оси связанной системы координат. В итоге, способ включает оценку множества параметров воздушной скорости на основании динамического давления.
Другие задачи и преимущества предложенных способа и системы будут очевидны из приведенного далее описания, прилагаемых чертежей и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На ФИГ. 1 схематически показан пример структурной схемы предложенной системы измерения воздушной скорости летательного аппарата.
На ФИГ. 2 показан перспективный вид внешней стороны летательного аппарата по ФИГ. 1, иллюстрирующий силу сопротивления по оси полусвязанной системы координат при работе летательного аппарата в высокоскоростном режиме.
На ФИГ. 3 показан вид компьютерной системы, используемой системой измерения воздушной скорости, показанной на ФИГ. 1.
На ФИГ. 4 показан пример структурной схемы модуля динамического давления системы расчета воздушной скорости по ФИГ. 1, содержащего подмодуль силы лобового сопротивления и подмодуль подъемной силы.
На ФИГ. 5 показан пример структурной схемы подмодуля силы сопротивления по ФИГ. 4, включающего модель лобового сопротивления, модель силы тяги и блок расчета сил.
На ФИГ. 6 показан подробный вид модели лобового сопротивления, показанной на ФИГ. 5.
На ФИГ. 7 показан подробный вид модели силы тяги, показанной на ФИГ. 5.
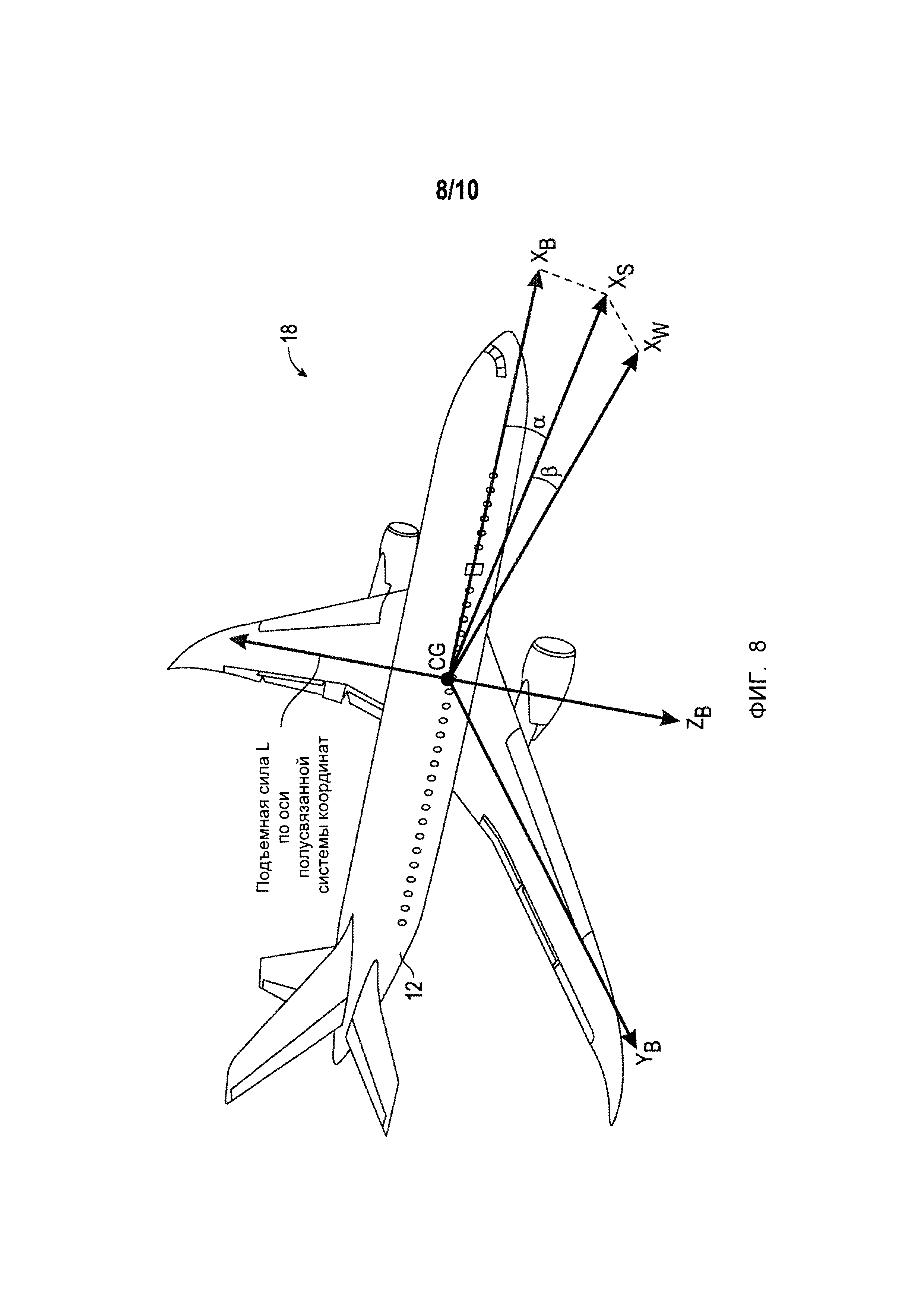
На ФИГ. 8 показан перспективный вид внешней стороны летательного аппарата по ФИГ. 1, иллюстрирующий подъемную силу по оси связанной системы координат при работе летательного аппарата в низкоскоростном режиме.
На ФИГ. 9 показан пример структурной схемы подмодуля подъемной силы, показанного на ФИГ. 4.
На ФИГ. 10 показан пример структурной схемы логического подмодуля, показанного на ФИГ. 4.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На ФИГ. 1 схематически показана иллюстративная структурная схема предложенной системы 10 измерения воздушной скорости. Система 10 измерения воздушной скорости непрерывно оценивает параметры воздушной скорости летательного аппарата 18, при этом она не полагается на результаты измерений обычных насадок для измерения полного давления. Система 10 измерения воздушной скорости принимает в качестве входных данных множество рабочих параметров 20, каждый из которых описан более подробно ниже. Каждый из рабочих параметров 20 представляет конкретный режим работы летательного аппарата 18. Система 10 измерения воздушной скорости содержит модуль 22 оценки динамического давления и модуль 24 оценки параметров воздушной скорости. Модуль 22 оценки динамического давления принимает в качестве входных данных рабочие параметры 20 и оценивает значение динамического давления Qbar на основании указанных входных данных. Модуль 24 оценки параметров воздушной скорости принимает динамическое давление Qbar в качестве входных данных от модуля 22 оценки динамического давления и оценивает по меньшей мере один параметр воздушной скорости на основании динамического давления Qbar. В частности, как пояснено более подробно ниже, параметры воздушной скорости содержат число MMDL Маха, эквивалентную воздушную скорость VeasMDL, давление QcMDL ударной нагрузки, откалиброванную воздушную скорость VcasMDL и истинную воздушную скорость VtMDL летательного аппарата 18. Параметры воздушной скорости используют для непрерывного расчета воздушной скорости летательного аппарата 18.
Рабочие параметры 20, являющиеся входными данными, вводимыми в систему 10 расчета воздушной скорости, содержат угол а атаки, угол В бокового скольжения, множество положений поверхностей управления, положение поверхности стабилизатора, положение закрылков, положение шасси, статическое давление ps, число N1 оборотов двигателя, полную температуру ТТОТ потока воздуха, вес W летательного аппарата и ускорение или коэффициент перегрузки. В одном из примеров барометрическая высота hp может быть использована вместо статического давления ps, а степень повышения давления в двигателе (EPR) может быть использована вместо числа N1 оборотов двигателя. Поверхности управления летательного аппарата 18 содержат, без ограничения, элероны, флапероны, рули направления, интерцепторы, рули высоты, устройства балансировки и закрылки. Положения поверхностей управления представляют положение подвижных поверхностей управления полетом летательного аппарата 18. В описанных примерах под положением поверхности управления может иметься в виду различные положения множества интерцепторов 8 (см. ФИГ. 2) и руля 6 направления (см. ФИГ. 2) летательного аппарата 18.
Согласно ФИГ. 2, положение поверхности стабилизатора является мерой угла установки горизонтального стабилизатора 14 относительно фюзеляжа 12 летательного аппарата 18, как видно на виде сбоку. Положение закрылков является показательным в отношении положения множества закрылков 28 (см. ФИГ. 2) крыльев 16. В частности, положение закрылков указывает, находятся ли закрылки 28 в убранном положении. В одном из примеров летательный аппарат 18 содержит трехпозиционный рычаг управления шасси, при этом тремя положениями являются положение «ВНИЗУ», положение «ВВЕРХУ» и положение «ВЫКЛЮЧЕНО». Положением шасси может быть положение «ВНИЗУ», положение «ВВЕРХУ» или некоторое другое положение между указанными положениями, если шасси находятся в переходном состоянии. Полная температура ТТОТ потока воздуха также может называться температурой торможения, и ее измеряют зондом для измерения полной температуры потока воздуха (не показан), установленном на летательном аппарате 18.
Коэффициент перегрузки представляет собой отношение полного аэродинамического усилия и движущего усилия, создаваемых летательным аппаратом 18, к полному весу летательного аппарата 18. Например, во время горизонтального полета летательного аппарата 18 по прямой, полная подъемная сила равна полному весу. Следовательно, коэффициент перегрузки является единичной гравитационной силой. Ускорение или коэффициент перегрузки определяют одним или более акселерометрами. Однако акселерометры большинства типов действительно измеряют коэффициент перегрузки. Если акселерометры действительно точно измеряют ускорения, то в дальнейшем соответствующий коэффициент перегрузки рассчитывают путем вычитания ускорения вследствие гравитации вдоль каждой оси.
На ФИГ. 2 показано изображение модели лобового сопротивления по оси полусвязанной системы координат, создаваемой при работе летательного аппарата 18 в высокоскоростных режимах. Высокоскоростные режимы описаны более подробно ниже. Как показано на ФИГ. 2, параметры ХВ, YB и ZB представляют соответственно оси х, у, и z связанной системы координат летательного аппарата 18, a CG представляет центр тяжести летательного аппарата 18. Угол α атаки измеряют между осью ХВ связанной системы координат летательного аппарата 18 и вектором XS, который представляет направленную вперед ось полусвязанной системы координат летательного аппарата 18. Направленная вперед ось XS полусвязанной системы координат является проекцией направления XW воздушной скорости летательного аппарата 18 на плоскость, заданную осью х и осью z. Угол β бокового скольжения измеряют между направленной вперед осью XS полусвязанной системы координат и направлением XW воздушной скорости летательного аппарата 18.
Согласно ФИГ. 1, все рабочие параметры 20 могут быть доступны в качестве входных данных от датчиков. Однако иногда угол а атаки, угол β бокового скольжения и статическое давление ps могут представлять собой рассчитанные или вычисленные значения вместо измеренных значений. В частности, статическое давление ps может быть измерено посредством надежного приемника статического давления, такого как приемник статического давления, или еще в одном примере статическое давление ps может быть рассчитано на основании геометрической высоты полета летательного аппарата 18. В одном из неограничивающих примеров значение геометрической высоты полета может быть получено от глобальной навигационной спутниковой системы. В одном из примеров угол а атаки может быть получен на основании инерциальных измерений летательного аппарата 18. Однако еще в одном подходе угол а атаки также может быть получен с использованием датчиков угла атаки. Угол β бокового скольжения может быть измерен датчиком или оценен на основании модели аэродинамических боковых сил летательного аппарата 18. Еще в одном примере угол β бокового скольжения получают на основании инерциальных измерений.
Согласно ФИГ. 1, в одном из примеров система 10 измерения воздушной скорости может быть использована в качестве первоисточника для определения воздушной скорости летательного аппарата 18. Еще в одном подходе система 10 измерения воздушной скорости может быть использована в качестве независимого источника данных о воздушной скорости и использована для мониторинга другого источника данных о воздушной скорости, такого как, например, трубка Пито. В частности, система 10 измерения воздушной скорости может быть использована для определения точности трубки Пито (не показана). Еще в одном примере система 10 измерения воздушной скорости может быть использована в качестве только одного из источников данных о воздушной скорости.
Согласно ФИГ. 3, система 10 расчета воздушной скорости реализована на одном или более компьютерных устройств или систем, таких как иллюстративная компьютерная система 30. Компьютерная система 30 содержит процессор 32, память 34, запоминающее устройство 36 большой емкости, интерфейс 38 ввода-вывода и человеко-машинный интерфейс 40. Компьютерная система 30 функционально соединена с одним или более внешними источниками 42 посредством сети 26 или интерфейса 38 ввода-вывода. Внешние источники могут содержать, без ограничения, серверы, базы данных, запоминающие устройства большой емкости, периферийные устройства, облачные сетевые службы или любое другое подходящее компьютерное оборудование, которое может быть использовано компьютерной системой 30.
Процессор 32 содержит одно или более устройств, выбранных из микропроцессоров, микроконтроллеров, процессоров для цифровой обработки сигналов, микрокомпьютеров, центральных вычислительных блоков, программируемых вентильных матриц, программируемых логических устройств, конечных автоматов, логических схем, аналоговых схем, цифровых схем или любых других устройств, которые управляют сигналами (аналоговыми или цифровыми сигналами) на основании рабочих инструкций, которые сохранены в памяти 34. Память 34 содержит одно запоминающее устройство или множество запоминающих устройств, в том числе, помимо прочего, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство, статическое оперативное запоминающее устройство (SRAM), динамическое оперативное запоминающее устройство (DRAM), флеш-память, кэш-память или любое другое устройство, выполненное с возможностью хранения информации. Запоминающее устройство 36 большой емкости содержит устройства хранения данных, такие как накопитель на жестких дисках, накопитель на оптических дисках, накопитель на магнитной ленте, энергозависимое или энергонезависимое твердотельное запоминающее устройство или любое другое устройство, выполненное с возможностью хранения информации.
Процессор 32 работает под управлением операционной системы 46, которая находится в памяти 34. Операционная система 46 управляет компьютерными ресурсами таким образом, что компьютерный программный код, реализованный в виде одного или более компьютерных программных приложений, таких как приложение 48, находящееся в памяти 34, может получать инструкции, исполняемые процессором 32. В альтернативном примере процессор 32 может исполнять непосредственно приложение 48, при этом в данном случае операционная система 46 может быть опущена. Кроме того, в памяти 34 находятся одна или более структур 49 данных, которые могут быть использованы процессором 32, операционной системой 46 или приложением 48 для сохранения или обработки данных.
Интерфейс 38 ввода-вывода обеспечивает машинный интерфейс, который функционально соединяет процессор 32 с другими устройствами и системами, такими как сеть 26 или внешний источник 42. Таким образом, приложение 48 работает во взаимодействии с сетью 26 или внешним источником 42 путем установления связи посредством интерфейса 38 ввода-вывода для обеспечения различных признаков, функций, приложений, процессов или модулей, содержащих примеры настоящего изобретения. Кроме того, приложение 48 содержит программный код, исполняемый одним или более внешними источниками 42, или в противном случае основано на функциях или сигналах, обеспечиваемых другими системными или сетевыми компонентами, являющимися внешними по отношению к компьютерной системе 30. В действительности, в условиях многочисленных возможных конфигураций аппаратного обеспечения и программного обеспечения специалистам в данной области техники будет понятно, что примеры настоящего изобретения могут содержать приложения, расположенные за пределами компьютерной системы 30, распределенной среди множества компьютеров или других внешних источников 42 или обеспеченной вычислительными ресурсами (аппаратным обеспечением и программным обеспечением), обеспечиваемыми в качестве сервиса по сети 26, такого как облачный вычислительный сервис.
Человеко-машинный интерфейс 40 функционально соединен с процессором 32 компьютерной системы 30 известным способом, что позволяет пользователю взаимодействовать непосредственно с компьютерной системой 30. Человеко-машинный интерфейс 40 может содержать видеодисплеи или буквенно-цифровые дисплеи, сенсорный экран, динамик и любые другие подходящие звуковые и визуальные индикаторы, выполненные с возможностью предоставления данных пользователю. Кроме того, человеко-машинный интерфейс 40 содержит устройства ввода и управления, такие как буквенно-цифровая клавиатура, указательное устройство, кнопочные панели, клавиши, ручки управления, микрофоны и т.п., выполненные с возможностью приема команд или входных данных от пользователя и возможностью передачи введенных входных данных в процессор 32.
База 44 данных может находиться на запоминающем устройстве 36 большой емкости и может быть использована для сбора и организации данных, используемых различными системами и модулями, описанными в данном документе. База 44 данных может содержать данные и дополнительные структуры данных, которые хранят или организуют данные. В частности, база 44 данных может быть организована с использованием любой организации или структуры баз данных, содержащей, помимо прочего, реляционную базу данных, иерархическую базу данных, сетевую базу данных или их сочетание. Система управления базами данных в форме компьютерного программного приложения, исполняющего инструкции на процессоре 32, может быть использована для получения доступа к информации или данным, сохраненным в записях базы 44 данных, в ответ на запрос, при этом указанный запрос может быть динамически определен и исполнен операционной системой 46, другими приложениями 48 или одним или более модулями.
На ФИГ. 4 показана структурная схема, иллюстрирующая модуль 22 оценки динамического давления и модуль 24 оценки параметров воздушной скорости, показанные на ФИГ. 1. Модуль 22 оценки динамического давления содержит подмодули 50, 52, 54. Подмодули 50, 52, 54 показаны в виде отдельных компонентов, что может указывать на использование техник модульного программирования. Однако конфигурация программ может уменьшить степень отличия подмодулей 50, 52, 54 путем объединения по меньшей мере некоторых программных функций множества модулей в один модуль. Кроме того, функции, приписываемые подмодулям 50, 52, 54, могут быть распределены другими способами или на других системах, отличных от показанных систем. Таким образом, примеры настоящего изобретения не ограничены конкретной компоновкой систем или модулей, показанных на ФИГ. 4.
Подмодуль 50 представляет собой подмодуль 50 силы сопротивления, который в дальнейшем оценивает динамическое давление Qbardrag на основе силы сопротивления, которое основано на модели лобового сопротивления летательного аппарата 18 (см. ФИГ. 1). Динамическое давление Qbardrag на основе силы сопротивления используют для определения динамического давления Qbar, если только летательный аппарат 18 не работает в низкоскоростном режиме. Система 10 измерения воздушной скорости определяет, что летательный аппарат 18 работает в высокоскоростном режиме при определении, что закрылки 28 летательного аппарата 18 (см. ФИГ. 2) убраны, и при приеме оцененного числа MMDL Маха со значением, превышающим приблизительно 0,4, от модуля 24 оценки параметров воздушной скорости. Система 10 измерения воздушной скорости определяет, что летательный аппарат 18 работает в низкоскоростном режиме при определении, что закрылки летательного аппарата 18 не убраны, или в качестве альтернативы при приеме оцененного числа MMDL Маха со значением, равным или меньшим приблизительно 0,4, от модуля 24 оценки параметров воздушной скорости.
Подмодуль 52 представляет собой подмодуль 52 подъемной силы, который определяет динамическое давление QbarLift при низкой скорости при условии, что летательный аппарат 18 работает в низкоскоростном режиме. Логический подмодуль 54 является логическим переключателем скорости. Как пояснено ниже и показано на ФИГ. 10, логический подмодуль 54 принимает в качестве входных данных динамическое давление Qbardrag при высокой скорости, определенное подмодулем 50 силы сопротивления, и динамическое давление QbarLift, определенное подмодулем 52 подъемной силы, и определяет оцениваемое динамическое давление Qbar на основании рабочих режимов летательного аппарата 18 (см. ФИГ. 1). Когда система 10 измерения воздушной скорости переходит между высокоскоростным режимом и низкоскоростным режимом, логический подмодуль 54 в системе 10 измерения воздушной скорости использует логическую схему гистерезисной функции и алгоритм 94 сглаживания перехода для определения оцениваемого динамического давления Qbar. Логическая схема гистерезисной функции и алгоритм 94 сглаживания перехода описаны более подробно ниже.
Модуль 24 оценки параметров воздушной скорости принимает в качестве входных данных динамическое давление Qbar от модуля 22 динамического давления, а также статическое давление ps или барометрическую высоту hp. Как пояснено ниже, на основании входных данных модуль 24 оценки параметров воздушной скорости определяет оцененное число MMDL Маха, эквивалентную воздушную скорость VeasMDL, давление QcMDL ударной нагрузки, откалиброванную воздушную скорость VcasMDL и истинную воздушную скорость VtMDL летательного аппарата. Как показано на ФИГ. 4, оцененное число MMDL Маха возвращают в качестве ответных входных данных в подмодули 50, 52 модуля 22 динамического давления.
Ниже будет описан расчет динамического давления Qbardrag, определяемого подмодулем 50 силы сопротивления. На ФИГ. 2 показана сила сопротивления по оси D полусвязанной системы координат летательного аппарата 18, создаваемой при высокоскоростных режимах работы. Как показано на ФИГ. 2, направленная вперед ось XS полусвязанной системы координат направлена вдоль проекции направления полета летательного аппарата 18 на плоскость XBZB. Другими словами, направленная вперед ось XS полусвязанной системы координат не связана с фиксированным направлением летательного аппарата 18. Кроме того, на ФИГ. 2 штриховой или пунктирной линией показана сила D сопротивления по оси полусвязанной системы координат, которая ориентирована в направлении, противоположном направленной вперед оси XS полусвязанной системы координат.
На ФИГ. 5 показана более подробная структурная схема подмодуля 50 силы сопротивления. Согласно ФИГ. 2 и 5, подмодуль 50 силы сопротивления содержит нелинейную модель 60 лобового сопротивления по оси полусвязанной системы координат, модель 62 силы тяги по оси полусвязанной системы координат и блок 64 расчета сил, который определяет динамическое давление Qbardrag. На ФИГ. 6 показана более подробная структурная схема модели 60 лобового сопротивления подмодуля 50 силы сопротивления. Согласно ФИГ. 5 и 6, модель 60 лобового сопротивления принимает в качестве входных данных рабочие параметры 20, каждый из которых представляет рабочий режим летательного аппарата 18, и определяет коэффициент Со лобового сопротивления по оси полусвязанной системы координат на основании рабочих параметров 20. В частности, модель 60 лобового сопротивления принимает в качестве входных данных угол α атаки, угол β бокового скольжения, положения поверхностей управления, положение поверхности стабилизатора, положение закрылков, положение шасси и оцененное число MMDL, Маха (от модуля 24 оценки параметров воздушной скорости, показанного на ФИГ. 4). Как пояснено более подробно ниже, модель 60 лобового сопротивления определяет коэффициент CD лобового сопротивления по оси полусвязанной системы координат на основании входных данных и множества составляющих CD1-CD6. Коэффициент СD лобового сопротивления по оси полусвязанной системы координат количественно определяет силу D сопротивления по оси полусвязанной системы координат летательного аппарата 18, показанного на ФИГ. 2, при этом меньший коэффициент CD лобового сопротивления по оси полусвязанной системы координат указывает на меньшую силу сопротивления.
Составляющие CD1-CD6 являются табличными функциями входных данных (то есть, угол α атаки, угол β бокового скольжения, положения поверхностей управления, положение поверхности стабилизатора, положение закрылков, положение шасси и оцененное число MMDL, Маха).
Как показано на ФИГ. 6, коэффициент Со лобового сопротивления по оси полусвязанной системы координат определяют уравнением 1 следующим образом:

где
«Flap» представляет положение закрылков, являющееся показательным в отношении положения закрылков 28 (см. ФИГ. 2) крыльев 16,
«Gear» представляет положение шасси,
«Spoiler» представляет различные положения интерцепторов 8 (см. ФИГ. 2),
«Stabilizer» представляет положение поверхности стабилизатора, а
«rudder» представляет положение руля 6 направления летательного аппарата 18 (см. ФИГ. 2).
Каждую из составляющих CD1-CD6 определяют на основании трехмерных таблиц поиска, сохраненных в памяти 34 системы 10 измерения воздушной скорости (см. ФИГ. 3). Например, составляющую CD1 определяют путем взятия конкретных значений угла а атаки и оцененного числа MMDL Маха, нахождения этих значений в одной из таблиц поиска и
последующего определения составляющей CD1 на основании конкретных значений угла α атаки и оцененного числа MMDL Маха. Кроме того, каждую из составляющих CD4-CD6 определяют на основании трехмерной таблицы поиска. В альтернативном примере составляющие CD1-CD6 определяют на основании математических функций, таких как полиномы.
Согласно ФИГ. 6, следует учитывать, что коэффициент Со лобового сопротивления по оси полусвязанной системы координат увеличивается в значении по мере попадания числа Маха летательного аппарата 18 в околозвуковую область (то есть, между 0,8 до 1,0). Следовательно, Уравнение 1 обеспечивает относительно точную оценку (то есть, вплоть до приблизительно 5%) коэффициента СD лобового сопротивления по оси полусвязанной системы координат даже при околозвуковых числах Маха. Кроме того, коэффициент CD лобового сопротивления по оси полусвязанной системы координат является относительно чувствительным к углу α атаки, в особенности при меньших значениях. Таким образом, результирующая воздушная скорость, которую в итоге рассчитывают с использованием системы 10 измерения воздушной скорости, не слишком чувствительна к небольшим погрешностям при измерении или определении угла атаки. В частности, с учетом наличия погрешности в параметрах, используемых при расчете силы сопротивления и силы тяги, значение воздушной скорости может иметь точность приблизительно 5%.
Значение коэффициента CD лобового сопротивления по оси полусвязанной системы координат не уходит в ноль или становится ничтожно малым. Таким образом, модель, показанная на ФИГ. 6, может точно оценивать воздушная скорость даже во время режимов, при которых коэффициент нормальной перегрузки достигает нулевой гравитации. В итоге, коэффициент CD полусвязанной системы координат многих современных летательных аппаратов не подвержен существенному влиянию аэроупругости или нестационарной аэродинамики. Следовательно, уравнение 1 не содержит факторы этих воздействий. Однако в одном из примеров дополнительные переменные могут быть введены в уравнение 1 для учета аэроупругости или нестационарной аэродинамики, что может улучшить точность коэффициента CD лобового сопротивления по оси полусвязанной системы координат.
На ФИГ. 7 показан подробный вид модели 62 силы тяги, показанной на ФИГ. 5. Как показано на ФИГ. 7, модель 62 силы тяги содержит блок 70 модели полной силы тяги двигателя, модель 72 силы воздушного сопротивления входа двигателя и блок 74 силы тяги по оси полусвязанной системы координат, который определяет составляющую TXS силы тяги по направленной вперед оси полусвязанной системы координат. Модель 62 силы тяги принимает в качестве входных данных число N1 оборотов двигателя или степень повышения давления в двигателе (EPR), статическое давление ps или высоту, полную температуру ТТОТ потока воздуха, оценку числа MMDL Маха, угол α атаки и угол β бокового скольжения. Кроме того, в качестве дополнения модель 62 силы тяги принимает в качестве входных данных показатель угла xFCT установки двигателя, определяемый по отношению к оси ХВ связанной системы координат (см. ФИГ. 2), и показатель угла zFCT установки двигателя, определяемый по отношению к оси ZB (см. ФИГ. 2). Оба показателя угла xFCT, zFCT установки двигателя являются геометрическими постоянными и имеют фиксированные значения, основанные на конкретном месте установки турбореактивного двигателя летательного аппарата 18 (не показан).
Полная сила тяги турбореактивного двигателя летательного аппарата (не показан на чертежах) является силой тяги, создаваемой выходным потоком турбореактивного двигателя летательного аппарата. Блок 70 модели полной силы тяги двигателя принимает входные данные и определяет два составляющей GXB и GZB полной силы тяги. Составляющую GXB полной силы тяги является полной силой тяги по отношению к оси ХВ связанной системы координат (см. ФИГ. 2), а составляющая GZB полной силы тяги является полной силой тяги по отношению к оси ZB (см. ФИГ. 2). Составляющую GXB полной силы тяги определяют на основании уравнения 2, а составляющую GZB полной силы тяги определяют на основании уравнения 3. Уравнения 2 и 3 приведены ниже:


где T1 является табличной функцией числа N1 оборотов двигателя, статического давления ps, оцененного числа MMDL Маха и полной температуры ТТОТ потока воздуха.
Согласно ФИГ. 7, модель 72 силы воздушного сопротивления входа двигателя определяет силу воздушного сопротивления Rd обратной тяги. Сила воздушного сопротивления входа представляет силу сопротивления, вызванную движущей силой воздуха, поступающего в турбореактивный двигатель летательного аппарата 18 (не показан). Силу воздушного сопротивления RD входа определяют уравнением 4 следующим образом:

где Т2 является табличной функцией числа N1 оборотов двигателя, статического давления ps, оцененного числа MMDL, Маха и полной температуры ТТОТ потока воздуха.
Блок 74 силы тяги по оси полусвязанной системы координат системы 10 определяет составляющую TXS силы тяги по направленной вперед оси полусвязанной системы координат путем вычитания силы воздушного сопротивления входа из полной силы тяги двигателя. Сила воздушного сопротивления входа представляет собой силу сопротивления, вызванную движущей силой воздуха, поступающего в турбореактивный двигатель летательного аппарата 18, а полная сила тяги двигателя представляет собой полную тягу, создаваемую турбореактивным двигателем летательного аппарата. В частности, составляющую TXS силы тяги по направленной вперед оси полусвязанной системы координат определяют уравнением 5 следующим образом:

Согласно ФИГ. 5, коэффициент CD лобового сопротивления по оси полусвязанной системы координат и составляющую TXS силы тяги по направленной вперед оси полусвязанной системы координат принимают в качестве входных данных блоком 64 расчета сил. Кроме того, блок 64 расчета сил принимает в качестве входных данных вес W летательного аппарата, ускорение/коэффициенты Nx, Nz перегрузки, угол α атаки и базовую площадь Sref. Базовая площадь Sref представляет площадь крыла в плане. В дальнейшем блок 64 расчета сил определяет динамическое давление Qbardrag, создаваемое при работе летательного аппарата 18 в высокоскоростных режимах. Динамическое давление Qbardrag основано на силе вдоль оси NXS полусвязанной системы координат. Уравнение 6 определяет силу вдоль оси NXS полусвязанной системы координат, а Уравнение 7 определяет динамическое давление Qbardrag, создаваемое в высокоскоростном режиме.


Далее будет описан расчет динамического давления QbarLift, определяемого подмодулем 52 подъемной силы. На ФИГ. 8 показан вид модели подъемной силы по оси связанной системы координат при работе летательного аппарата 18 в низкоскоростных режимах. Как показано на ФИГ. 8, подъемную силу L по оси связанной системы координат летательного аппарата 18 создают в направлении, по существу противоположном оси ZB. Подъемная сила L по оси связанной системы координат представляет силу, которая обычно противодействует весу летательного аппарата 18 во время горизонтального полета. Следует учитывать, что сила вдоль оси ZB является фиксированной по отношению к фюзеляжу 12 летательного аппарата 18. Обычно, вектор подъемной силы летательного аппарата представлен вдоль направления, перпендикулярного направлению полета.
На ФИГ. 9 показан подмодуль 52 подъемной силы. Согласно ФИГ. 8 и 9, подмодуль 52 подъемной силы содержит нелинейную модель 80 аэродинамической подъемной силы по оси связанной системы координат, модель 82 силы тяги по оси связанной системы координат и блок 84 расчета сил. Как пояснено ниже, модель 80 аэродинамической подъемной силы определяет коэффициент CL подъемной силы по оси связанной системы координат, который соответствует подъемной силе L (см. ФИГ. 8) вдоль вертикальной оси ZB связанной системы координат, создаваемой при работе летательного аппарата 18 на низкой скорости.
Согласно ФИГ. 9, нелинейная модель 80 аэродинамической подъемной силы по оси связанной системы координат определяет коэффициент CL подъемной силы по оси связанной системы координат на основании угла α атаки, угла β бокового скольжения, положения поверхностей управления, положения поверхности стабилизатора, положения закрылков, положения шасси и оцененного числа MMDL, Маха (от модуля 24 оценки параметров воздушной скорости, показанного на ФИГ. 4). Аналогично коэффициенту CD лобового сопротивления по оси полусвязанной системы координат, коэффициент CL подъемной силы по оси связанной системы координат определяют на основании множества составляющих CL1-CL6 - Составляющие CL1-CL6 являются табличными функциями входных данных (угол α атаки, угол β бокового скольжения, положения поверхностей управления, положение поверхности стабилизатора, положение закрылков, положение шасси и оцененное число MMDL Маха), а коэффициент CL подъемной силы по оси связанной системы координат определяют на основании уравнения 8 следующим образом:

Модель 82 силы тяги по оси связанной системы координат определяет движущую подъемную силу по оси связанной системы координат, обозначенную как TZB, на основании уравнения 9 следующим образом:

Коэффициент CL подъемной силы по оси связанной системы координат и движущую подъемную силу TZB по оси связанной системы координат принимают в качестве входных данных блоком 84 расчета сил. Кроме того, блок 84 расчета сил принимает в качестве входных данных вес W летательного аппарата, ускорение/коэффициент Nz перегрузки и базовую площадь Sref. В дальнейшем блок 84 расчета сил определяет динамическое давление QbarLift, создаваемое при работе летательного аппарата 18 в низкоскоростных режимах. Динамическое давление QbarLift основано на силе вдоль оси ZB связанной системы координат. Уравнение 10 определяет динамическое давление QbarLift следующим образом:

Согласно ФИГ. 4, динамическое давление Qbardrag из подмодуля 50 силы сопротивления и динамическое давление QbarLift из подмодуля 52 подъемной силы принимают логическим подмодулем 54. Как пояснено ниже, логический подмодуль 54 оценивает динамическое давление Qbar на основании динамического давления Qbardrag, или динамического давления QbarLift. Другими словами, динамическое давление Qbar основано на коэффициенте CD лобового сопротивления по оси полусвязанной системы координат или коэффициенте CL подъемной силы по оси связанной системы координат. На ФИГ. 10 показан логический подмодуль 54. Как показано на ФИГ. 10, логический подмодуль 54 содержит переключатель 90 выбора, который используют для выбора динамического давления Qbardrag или динамического давления QbarLift. Следует учитывать, что на ФИГ. 10 по существу показан иллюстративный пример логического подмодуля 54. В действительности, логический подмодуль 54 может быть реализован с использованием множества различных подходов для выбора источника динамического давления Qbar. Например, еще в одном варианте реализации
также может быть использована переходная функция, основанная на средневзвешенном двух исходных значений на протяжении указанного переходного диапазона числа MMDL Маха и положения закрылков.
Согласно ФИГ. 10, логический подмодуль 54 принимает в качестве входных данных динамическое давление Qbardrag от подмодуля 50 силы сопротивления, оцененное число MMDL Маха, сигнал, являющийся показательным в отношении положения закрылков 28 (см. ФИГ. 2) крыльев 16, и динамическое давление QbarLift. Входные данные отправляют в блок 92 выбора. Блок 92 выбора генерирует логический сигнал, указывающий на значение «истина» при значении оцененного числа MMDL Маха более приблизительно 0,4 и при нахождении закрылков 28 в убранном положении. Сигнал со значением «истина» указывает на то, что летательный аппарат 18 работает в высокоскоростных режимах. Если логический сигнал указывает на то, что летательный аппарат 18 (см. ФИГ. 1) работает в высокоскоростном режиме, переключатель 90 выбирает динамическое давление Qbardrag из подмодуля 50 силы сопротивления в качестве оцененного динамического давления Qbar.
Во всех других режимах летательный аппарат 18 определен таким образом, что он работает в низкоскоростном режиме, а блок 92 выбора задает логический сигнал в значение «ложь». В частности, блок 92 выбора генерирует логический сигнал, указывающий на значение «ложь» при значении оцененного числа MMDL Маха менее или равном приблизительно 0,4, или при неубранных закрылках 28 (то есть, при развернутых закрылках). Сигнал со значением «ложь» указывает на то, что летательный аппарат 18 работает в низкоскоростном режиме. Если логический сигнал указывает на то, что летательный аппарат 18 работает в низкоскоростном режиме, переключатель 90 выбирает динамическое давление QbarLift из подмодуля 52 подъемной силы в качестве оцененного динамического давления Qbar.
Блок 92 выбора содержит логическую схему гистерезисной функции. Логическая схема гистерезисной функции может по существу предотвратить непрерывное переключение между двумя источниками, если число MMDL Маха недалеко от порогового значения 0,4. В частности, при увеличении оцененного числа MMDL Маха от значения, меньшего приблизительно 0,4, до значения, большего приблизительно 0,4 с погрешностью приблизительно 0,02, и в ответ на уборку закрылков 28 (см. ФИГ. 2), логическая схема гистерезисной функции изменяет логический сигнал, созданный блоком 92 выбора из значения «ложь» в значение «истина». Следовательно, логическая схема гистерезисной функции определяет, что летательный аппарат 18 переключается из низкоскоростного режима в высокоскоростной режим. Логическую схему гистерезисной функции используют для определения изменения числа Маха от значения, меньшего приблизительно 0,4, до значения, по существу превышающего 0,4, которое в свою очередь по существу предотвращает непрерывное переключение. Аналогичным образом, при дальнейшем уменьшении оцененного числа MMDL Маха до значения, меньшего или равного приблизительно 0,4 с погрешностью приблизительно 0,02, логическая схема гистерезисной функции изменяет логический сигнал, созданный блоком 92 выбора, из значения «истина» в значение «ложь». Следовательно, логическая схема гистерезисной функции определяет, что летательный аппарат 18 переключается из высокоскоростного режима в низкоскоростной режим.
Согласно ФИГ. 10, переключатель 90 также содержит алгоритм 94 сглаживания перехода. Алгоритм 94 сглаживания перехода обеспечивает плавный переход по мере переключения оцененного динамического давления Qbar из одного исходного значения в другое. В частности, значение оцененного динамического давления Qbar переключают между динамическим давлением Qbardrag и динамическим давлением QbarLift на основании алгоритма 94 сглаживания перехода, при этом алгоритм 94 сглаживания перехода постепенно изменяет значение оцененного динамического давления Qbar в течение некоторого периода времени. Период времени перехода между значениями динамических давлений Qbardrag, QbarLift составляет приблизительно несколько секунд. Алгоритм 94 сглаживания перехода может быть основан на любом количестве различных подходов, таких как, помимо прочего, переключение без переходных процессов.
Согласно ФИГ. 4, оцененное динамическое давление Qbar в дальнейшем отправляют в модуль 24 оценки параметров воздушной скорости. В дальнейшем модуль 24 оценки параметров воздушной скорости определяет параметры воздушной скорости, которые содержат оцененное число MMDL Маха, эквивалентную воздушную скорость VeasMDL, давление QcMDL ударной нагрузки, откалиброванную воздушную скорость VcasMDL и истинную воздушную скорость VtMDL летательного аппарата 18. Параметры воздушной скорости используют для непрерывного расчета воздушной скорости летательного аппарата 18. Истинная воздушная скорость VtMDL представляет скорость летательного аппарата 18 по отношению к потоку наружного воздуха, а эквивалентная воздушная скорость VeasMDL является истинной воздушной скоростью, скорректированной на плотность локального воздуха. Откалиброванную воздушную скорость VcasMDL вычисляют на основании давления QcMDL ударной нагрузки. Оцененное число MMDL Маха определено на основании уравнения 11, эквивалентная воздушная скорость VeasMDL, основана на уравнении 12, давление QcMDL ударной нагрузки основано на уравнении 13, откалиброванная воздушная скорость VcasMDL основана на уравнении 14, а истинная воздушная скорость VtMDL основана на уравнении 15:





где
эквивалентная воздушная скорость VeasMDL, откалиброванная воздушная скорость VcasMDL и истинная воздушная скорость VtMDL измерены в узлах,
динамическое давление Qbar и давление QcMDL ударной нагрузки приведены в фунтах (0,454 кг) на квадратный фут (30,48 см),
Р0 представляет стандартное дневное давление на уровне моря, а полная температура ТТОТ потока воздуха выражена в кельвинах.
Согласно чертежам, предложенная система измерения воздушной скорости обеспечивает надежный подход для оценки воздушной скорости вне зависимости от результатов измерений обычных насадок для измерения полного давления. Как пояснено выше, система измерения воздушной скорости содержит модель лобового сопротивления, которая может быть использована для оценки различных параметров воздушной скорости во время высокоскоростных режимов летательного аппарата. Следовательно, система измерения воздушной скорости обеспечивает относительно точную оценку параметров воздушной скорости во всем диапазоне режимов полета на околозвуковой скорости. В отличие от этого, система, полностью основанная на модели подъемной силы, может быть и не выполнена с возможностью точного расчета воздушной скорости во время высокоскоростных режимов полета, в особенности при околозвуковых числах Маха. В качестве дополнения воздушная скорость, рассчитанная системой, полностью основанной на модели подъемной силы, может быть чувствительна к изменениям измеренного угла атаки летательного аппарата на высоких скоростях или когда летательный аппарат имеет относительно низкий вес. Кроме того, предложенная система расчета воздушной скорости имеет меньшую чувствительность к изменениям угла атаки по сравнению с существующими системами на основе подъемной силы.
Кроме того, настоящее изобретение содержит примеры согласно следующим пунктам:
Пункт 1. Система (10) оценки множества параметров воздушной скорости для непрерывного расчета воздушной скорости летательного аппарата (18), содержащая:
один или более процессоров (32) и
память (34), соединенную с указанными одним или более процессорами (32) и хранящую данные, содержащие базу данных (44) и программный код, который, при его исполнении указанными одним или более процессорами (32), побуждает систему (10):
принимать множество рабочих параметров (20), каждый из которых представляет режим работы летательного аппарата (18);
определять коэффициент (CD) лобового сопротивления по оси полусвязанной системы координат на основании указанного множества рабочих параметров (20), при этом коэффициент (CD) лобового сопротивления по оси полусвязанной системы координат количественно определяет лобовое сопротивление по оси полусвязанной системы координат летательного аппарата (18), создаваемое при высокоскоростном режиме;
определять коэффициент (CL) подъемной силы по оси связанной системы координат на основании указанного множества рабочих параметров (20), при этом коэффициент (CL) подъемной силы по оси связанной системы координат соответствует подъемной силе летательного аппарата (18), создаваемой вдоль вертикальной оси связанной системы координат при низкоскоростном режиме;
оценивать динамическое давление (Qbar) на основании одного из коэффициента (CD) лобового сопротивления по оси полусвязанной системы координат и коэффициента (CL) подъемной силы по оси связанной системы координат и
оценивать указанное множество параметров воздушной скорости на основании динамического давления (Qbar).
Пункт 2. Система (10) по пункту 1, выполненная с возможностью определения, что летательный аппарат (18) работает в высокоскоростном режиме на основании:
определения, что множество закрылков (28) летательного аппарата (18) убраны, и
при приеме оцененного числа (MMDL) Маха со значением, превышающим приблизительно 0,4.
Пункт 3. Система (10) по пункту 1, выполненная с возможностью определения, что летательный аппарат (18) работает в низкоскоростном режиме на основании:
определения, что множество закрылков (28) летательного аппарата (18) не убраны, или
при приеме оцененного числа (MMDL) Маха со значением, меньшим или равным приблизительно 0,4.
Пункт 4. Система (10) по пункту 1, определяющая, посредством логической схемы гистерезисной функции, что
при увеличении оцененного числа (MMDL) Маха от значения, меньше приблизительно 0,4, до значения, больше приблизительно 0,4, с погрешностью приблизительно 0,02 и при уборке множества закрылков (28) происходит переключение летательного аппарата (18) из низкоскоростного режима в высокоскоростной режим, а
при уменьшении оцененного числа (MMDL) Маха до значения, меньше или равно приблизительно 0,4, с погрешностью приблизительно 0,02 происходит переключение летательного аппарата (18) из высокоскоростного режима в низкоскоростной режим.
Пункт 5. Система по пункту 1, выполненная с возможностью: переключения значения оцененного динамического давления (Qbar) между динамическим давлением (Qbardrag) и динамическим давлением (QbarLift) на основании алгоритма (94) сглаживания перехода, который постепенно изменяет значение оцененного динамического давления (Qbar) в течение периода времени.
Пункт 6. Система (10) по пункту 1, в которой указанные параметры воздушной скорости содержат оцененное число (MMDL) Маха, эквивалентную воздушную скорость (VeasMDL), давление (QcMDL) ударной нагрузки, откалиброванную воздушную скорость (VcasMDL) и истинную воздушную скорость (VtMDL) летательного аппарата (18).
Пункт 7. Система (10) по пункту 1, в которой указанное множество рабочих параметров (20) содержат угол (α) атаки, угол (β) бокового скольжения, множество положений поверхностей управления, содержащих множество положений интерцепторов и положение руля направления, положение поверхности стабилизатора, положение закрылков, положение шасси и оцененное число (MMDL) Маха.
Пункт 8. Система (10) по пункту 7, в которой коэффициент (CD) лобового сопротивления по оси полусвязанной системы координат определен следующим образом:
CD=CD1(α, MMDL)+CD2(Flap, MMDL)+CD3(Gear, MMDL)+CD4(Spoiler, α, MMDL)+CD5(stabilizer, α, MMDL)+CD6(rudder, β, MMDL)
где «Flap» представляет положение закрылков, являющееся показательным в отношении положения закрылков (28) крыльев (16), «Gear» представляет положение шасси, «Spoiler» представляет множество положений интерцепторов, «Stabilizer» представляет положение поверхности стабилизатора, «rudder» представляет положение руля направления, а каждая из составляющих CD1-CD6 определена на основании соответствующих таблиц поиска, сохраненных в памяти (34).
Пункт 9. Система (10) по пункту 1, выполнена с возможностью оценки динамического давления (Qbardrag) при высокой скорости на основании модели лобового сопротивления летательного аппарата (18), при этом динамическое давление (Qbardrag) при высокой скорости используется для определения динамического давления (Qbar), только если летательный аппарат (18) не работает в низкоскоростном режиме.
Пункт 10. Система (10) по пункту 9, в которой динамическое давление (Qbardrag) при высокой скорости определено на основании составляющей TXS силы тяги по направленной вперед оси полусвязанной системы координат, который определен путем вычитания силы воздушного сопротивления входа турбореактивного двигателя из полной силы тяги турбореактивного двигателя.
Пункт 11. Способ оценки множества параметров воздушной скорости для непрерывного расчета воздушной скорости летательного аппарата (18), включающий:
прием, посредством компьютера (30), множества рабочих параметров (20), каждый из которых представляет режим работы летательного аппарата (18);
определение, посредством компьютера (30), коэффициента (CD) лобового сопротивления по оси полусвязанной системы координат на основании указанного множества рабочих параметров (20), при этом коэффициент (CD) лобового сопротивления по оси полусвязанной системы координат количественно определяет лобовое сопротивление по оси полусвязанной системы координат летательного аппарата (18), создаваемое при высокоскоростном режиме;
определение коэффициента (CL) подъемной силы по оси связанной системы координат на основании указанного множества рабочих параметров (20), при этом коэффициент (CL) подъемной силы по оси связанной системы координат соответствует подъемной силе летательного аппарата (18), создаваемой вдоль вертикальной оси связанной системы координат при низкоскоростном режиме;
оценку динамического давления (Qbar) на основании одного из коэффициента (CD) лобового сопротивления по оси полусвязанной системы координат и коэффициента (CL) подъемной силы по оси связанной системы координат и оценку указанного множества параметров воздушной скорости на основании динамического давления (Qbar).
Пункт 12. Способ по пункту 11, включающий определение того, что летательный аппарат (18) работает в высокоскоростном режиме на основании:
определения того, что множество закрылков (28) летательного аппарата (18) убраны, и
при приеме оцененного числа (MMDL) Маха со значением, превышающим приблизительно 0,4.
Пункт 13. Способ по пункту 11, включающий определение того, что летательный аппарат (18) работает в низкоскоростном режиме на основании:
определения того, что множество закрылков (28) летательного аппарата (18) убраны, или
при приеме оцененного числа (MMDL) Маха со значением, меньшим или равным приблизительно 0,4.
Пункт 14. Способ по пункту 11, включающий:
при увеличении оцененного числа (MMDL) Маха от значения, меньше приблизительно 0,4, до значения, больше приблизительно 0,4, с погрешностью приблизительно 0,02 и при уборке множества закрылков (28) определение, посредством логической схемы гистерезисной функции, что происходит переключение летательного аппарата (18) из низкоскоростного режима в высокоскоростной режим, а
при уменьшении оцененного числа (MMDL) Маха до значения, меньше или равно приблизительно 0,4, с погрешностью приблизительно 0,02 определение, посредством логической схемы гистерезисной функции, что происходит переключение летательного аппарата (18) из высокоскоростного режима в низкоскоростной режим.
Пункт 15. Способ по пункту 11, включающий переключение значения оцененного динамического давления (Qbar) между динамическим давлением (Qbardrag) и динамическим давлением (QbarLift) на основании алгоритма (94) сглаживания перехода, который постепенно изменяет значение оцененного динамического давления (Qbar) в течение периода времени.
Пункт 16. Способ по пункту 11, согласно которому параметры воздушной скорости содержат оцененное число (MMDL) Маха, эквивалентную воздушную скорость (VeasMDL, давление (QcMDL) ударной нагрузки, откалиброванную воздушную скорость (VcasMDL) и истинную воздушную скорость (VtMDL) летательного аппарата (18).
Пункт 17. Способ по пункту 11, согласно которому указанное множество рабочих параметров (20) содержат угол (α) атаки, угол (β) бокового скольжения, множество положений поверхностей управления, содержащих положение интерцептора и положение руля направления, положение поверхности стабилизатора, множество положений закрылков, положение шасси и оцененное число (MMDL) Маха.
Пункт 18. Способ по пункту 17, включающий определение коэффициента (CD) лобового сопротивления по оси полусвязанной системы координат следующим образом:
CD=CD1(α,MMDL)+CD2(Flap, MMDL)+CD3(Gear, MMDL)+CD4(Spoiler, α, MMDL)+CD5 (stabilizer, α, MMDL)+CD6(rudder, β, MMDL)
где «Flap» представляет положение закрылков, являющееся показательным в отношении положения закрылков (28) крыльев (16), «Gear» представляет положение шасси, «Spoiler» представляет множество положений интерцепторов, «Stabilizer» представляет положение поверхности стабилизатора, «rudder» представляет положение руля направления, а каждая из составляющих CD1-CD6 определена на основании соответствующих таблиц поиска, сохраненных в памяти (34) компьютера (30).
Пункт 19. Способ по пункту 11, включающий оценку динамического давления (Qbardrag) при высокой скорости на основании модели лобового сопротивления летательного аппарата (18),
при этом динамическое давление (Qbardrag) при высокой скорости используют для определения динамического давления (Qbar), только если летательный аппарат (18) не работает в низкоскоростном режиме.
Пункт 20. Способ по пункту 19, включающий определение динамического давления (Qbardrag) при высокой скорости на основании составляющей (TXS) силы тяги по направленной вперед оси полусвязанной системы координат, определенного путем вычитания силы воздушного сопротивления входа из полной силы тяги турбореактивного двигателя летательного аппарата (18).
Несмотря на то, что формы устройства и способов, описанных в данном документе, представляют предпочтительные примеры настоящего изобретения, следует понимать, что настоящее изобретение не ограничено этими точными формами устройства и способов, а изменения могут быть реализованы в настоящем изобретении без выхода за рамки его объема.
Реферат
Группа изобретений относится к системе и способу оценки множества параметров воздушной скорости. Система содержит один или более процессоров, память, хранящую данные для их исполнения процессором для реализации способа, заключающегося в том, что принимают множество рабочих параметров режимов работы летательного аппарата, определяют коэффициент лобового сопротивления по оси полусвязанной системы координат на основании указанного множества рабочих параметров, определяют коэффициент подъемной силы по оси связанной системы координат при низкоскоростном режиме, оценивают динамическое давление на основании одного из коэффициента лобового сопротивления по оси полусвязанной системы координат и коэффициента подъемной силы по оси связанной системы координат и оценивают указанное множество параметров воздушной скорости на основании динамического давления. Обеспечивается повышение точности оценки воздушной скорости летательного аппарата. 2 н. и 18 з.п. ф-лы, 10 ил.
Комментарии