Инклинометрический измеритель скорости и направления придонных течений - RU193228U1
Код документа: RU193228U1
Чертежи






Описание
Полезная модель относится к области гидрометрии, в частности к океанографической технике, применяемой при исследовании пространственно-временной изменчивости течений в придонных слоях природных водоемов.
Известны измерители придонных течений (http://www.nortekusa.com/usa/products/acoustic-doppler-velocimeters; https://www.elscolab.com/en/products/acoustic-doppler-velocimeter-for-oceans-adv-ocean; https://www.sontek.com/adp-acoustic-doppler-profiler), содержащие блок записи и обработки информации, приемный блок и измерительный блок, действующий по принципу измерения характеристик акустического сигнала, обусловленного изменением скорости течения, направление которого определяется ориентацией прибора в пространстве, которое, в свою очередь, определяется магнитным зондом.
К недостаткам измерителей указанных типов можно отнести их техническую сложность и высокую стоимость, что является препятствием для изучения пространственной структуры поля придонного течения, меняющейся во времени, что подразумевает одновременное использование большого числа измерителей.
Альтернативой акустическому методу измерений скорости течений является инклинометрический метод. Измерители, основанные на этом методе, также содержат блок записи и обработки информации, приемный блок и измерительный блок, но последний действует по принципу изменения своего наклона под воздействием течения. Из действующих на данном принципе приборов наиболее известна серия измерителей, производимых компанией Lowell Instruments LLC [www.lowellinstruments.com] под наименованием Tilt Current Meters №№1-5. Приборы этой серии, независимо от диапазона рабочих глубин и скоростей, имеют одинаковый состав функциональных блоков и отличаются только габаритами и прочностными параметрами конструктивных элементов, обеспечивающих герметичность электроники и плавучесть в широком диапазоне изменения гидростатического давления.
Кроме упомянутой серии устройств, известны основанные на том же принципе измерители придонных течений, описанные в (Baranov V., Ocherednik V., Zatsepin A., Kuklev S., and Mashura D. Preliminary results of field tests of a tilt current meter in coastal zone of the sea. Scientific-practical electronic journal Alley-Science, 2018, No. 5 (21); Sheremet V.A. SeaHorse tilt current meter: inexpensive near bottom current measurements based on drag principle with coastal applications. Eos Transactions American Geophysical Union. Ocean Sci. Meet., 2010, Vol.91, No. 26, Abstract PO25C13), у которых приемник гидростатического давления имеет форму вытянутого цилидра. Устройство, описанное в (Hansen А.В., Carstensen S., Christensen D.F., and Aagaard Т. Performance of a tilt current meter in the surf zone. Coastal Dynamics, 2017, Paper No. 218, pp. 944-954) отличается формой приемника гидростатического давления - это короткий цилиндр с крышками в виде полусфер. Метрологические параметры всех трех упомянутых устройств в первом приближении близки: они работают в диапазоне скоростей от 2-3 см/с до 50-80 см/с.
К недостаткам выше указанных измерителей можно отнести то, что, как и за всеми гладкими телами круглого сечения, в потоке за ними формируется вихревая дорожка (вихри Кармана), вследствие чего возникают автоколебания измерителя на частоте срыва вихрей, близкой к 1 Гц. Амплитуда угловых колебаний близка к величине измеряемого угла наклона, соответственно, уровень шумового сигнала имеет тот же порядок, что и уровень полезного сигнала. Для устранения указанного недостатка необходимо предотвратить автоколебания тела измерителя в потоке, что требует изменения режима обтекания. Возникновение автоколебаний тел в потоке, влекущее за собой негативные последствия, известно в самолетостроении (флаттер), при эксплуатации воздушных линий («галлопирование» проводов на ветру), в мостостроении, при возведении труб и металлоконструкций и др. Во многих случаях причиной автоколебаний было формирование когерентных структур в запрепятственной области. Известны методы предотвращения подобных эффектов, основанные на создание приспособлений, модифицирующих поток в погранслое обтекаемых тел таким образом, чтобы исключить периодичность отрыва вихрей. Необходимая рандомизация структуры погранслоя при обтекании цилиндра достигалась, например, использованием аэродинамических виброгасителей для воздушных линий в виде вставок перфорированных цилиндров (Hunt, Richard: Overhead line oscillations and the effect of aerodynamic dampers. IEEE Trans. PAS 116(11), 1869-1874 (1969)), а для обдуваемых ветром металлоконструкций - перфорацией труб и или использованием «рубашек» в виде перфорированных труб (Савицкий Г.А. Ветровая нагрузка на сооружения. Издательство литературы по строительству. Москва, 1972, 110 с.). Этот опыт может быть эффективно использован для предотвращения автоколебаний инклинометрических измерителей течений, подвижная часть которых имеет форму гладких тел вращения.
За ближайший аналог предлагаемой полезной модели принят инклинометрический измеритель скорости придонного течения фирмы Lowell Instruments LLC - TCM1 (https://www.hobodataloggers.com.au/tcm-1), предназначенный для работ на глубинах от 0.76 м, что соответствует полной высоте устройства, до 300 м, что соответствует прочности гермоконтейнера. Измеритель скорости придонного течения содержит подвижную часть, меняющую свое положение под воздействием измеряемого течения, и неподвижную часть, обеспечивающую размещение устройства в придонном течении. Подвижная часть содержит измерительный блок, расположенный в герметичном контейнере цилиндрической формы, с которым соосно неподвижно соединен элемент плавучести, обеспечивающий сборке положительную плавучесть, выполненный в виде цилиндра такого же диаметра. Подвижная часть измерителя прикреплена к неподвижной части - якорю - с помощью гибкого соединения и при нулевой скорости обтекания принимает вертикальную ориентацию, но при наличии гидродинамического давления, т.е. при наличии течения, отклоняется от вертикали на определенный угол. Для измерения величины и направления наклона относительно магнитного поля используются 3-компонентный акселерометр и 3-компонентный магнитный зонд, размещенные в герметичном контейнере вместе с электронным блоком управления и накопления данных, с таймером и источником электропитания. Внешние датчики отсутствуют. Регулируемая плавучесть и геометрические размеры подвижной части измерителя позволяют измерять придонные скорости в интервале 2-40 см/с или 3-80 см/с с погрешностью 3%. Направление течения для скоростей больше 5 см/с измеряется с точностью 5°.
Результаты измерений скорости и направления течения, получаемые при использовании инклинометрического измерителя, описанного в ближайшем аналоге, являются недостаточно точными из-за шумовых сигналов, возникающих в результате автоколебаний подвижной части измерителя, являющихся следствием формирования вихрей Кармана при обтекании цилиндрического тела.
Полезная модель решает проблему повышения точности и достоверности результатов измерения скорости и направления придонных течений при помощи инклинометрического измерителя за счет конструктивных изменений, позволяющих демпфировать автоколебания подвижной части измерителя.
Для получения необходимого технического результата в инклинометрическом измерителе скорости и направления придонных течений, содержащем подвижную часть, в которой находится помещенный в герметичный контейнер измерительный блок, включающий трехкомпонентный акселерометр, трехкомпонентный магнитный зонд, электронный блок управления и накопления данных, таймер, источник электропитания, средства, обеспечивающие заданную плавучесть подвижной части, и приспособления для крепления подвижной части с учетом заданной плавучести, предлагается подвижную часть измерителя для демпфирования автоколебаний поместить в цилиндрическую оболочку, выполненную с возможностью дросселирования набегающего потока жидкости. Цилиндрическая оболочка может быть выполнена перфорированной.
Дросселирование предлагается применить для разрушения когерентности структуры погранслоя на поверхности тела, обтекаемого набегающим потоком жидкости.
Предлагаемый инклинометрический измеритель скорости и направления придонных течений приведен на прилагаемых к описанию схемах:
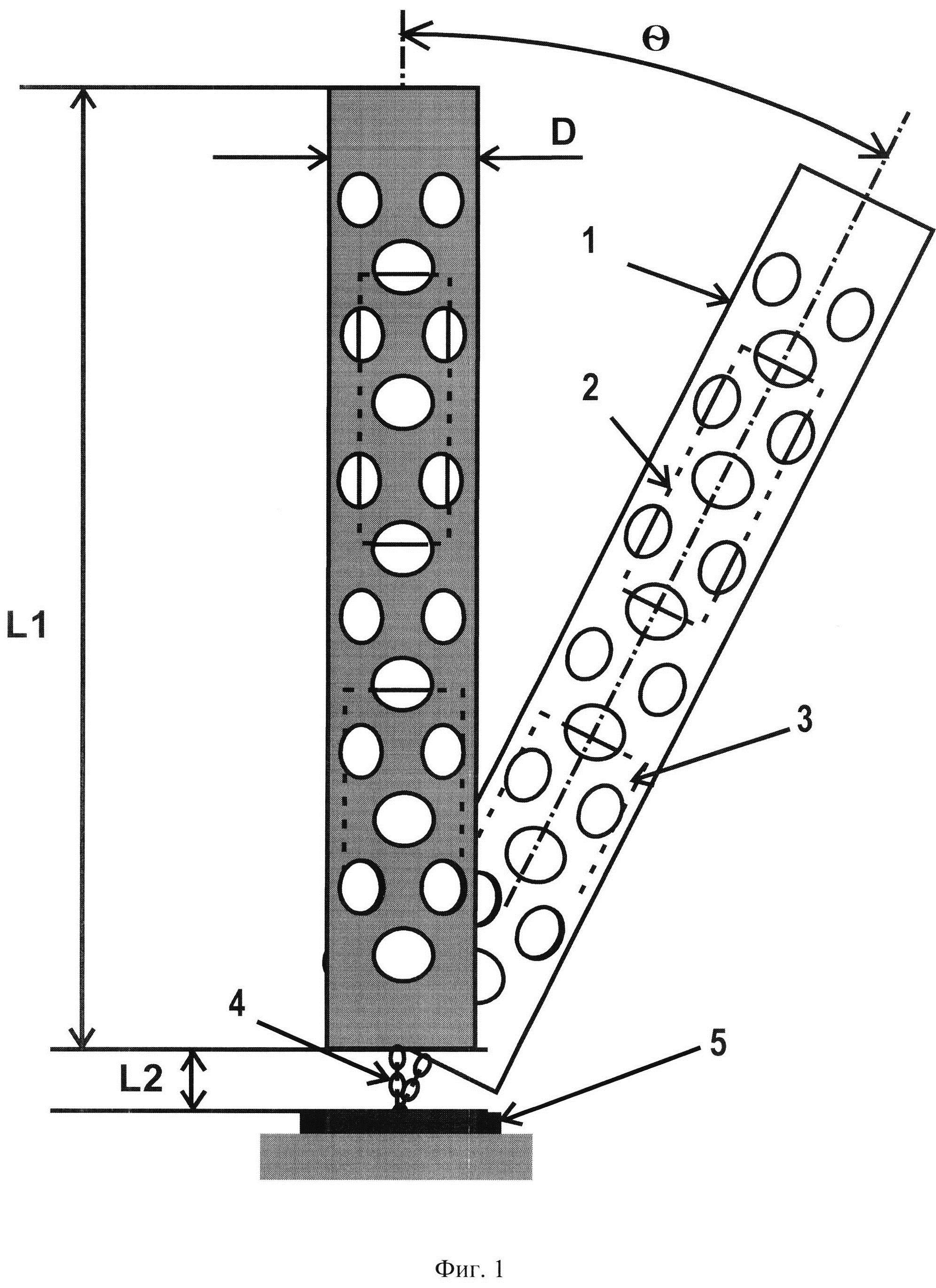
фиг. 1 - инклинометрический измеритель скорости и направления придонных течений при положительной плавучести, осевой разрез;
фиг. 2 - инклинометрический измеритель скорости и направления придонных течений при положительной плавучести, расположение и крепление гермоконтейнера и поплавка;
фиг. 3 - инклинометрический измеритель скорости и направления придонных течений при отрицательной плавучести, расположение и крепление гермоконтейнера и груза;
фиг. 4 - фото инклинометрического измерителя скорости и направления придонных течений, возможный вариант размещения на дне с креплением к якорю;
фиг. 5 - фото инклинометрического измерителя скорости и направления придонных течений при отрицательной плавучести, возможный вариант размещения на дне в арочной конструкции;
фиг. 6 - возможный вариант постановки донной станции с инклинометрическим измерителем скорости и направления придонных течений с акустическим размыкателем и всплывающим буем;
фиг. 7 - пример сравнительных испытаний измерителей с различным исполнением оболочки в опытовом бассейне с буксировочной платформой;
фиг. 8 - пример продолжительной записи придонных течений в натурном эксперименте;
фиг. 9 - фрагмент записи придонного течения в условиях, когда скорость среднего течения упала до нуля, а наблюдаемое слабое периодическое движение было обусловлено волнами зыби.
На схемах приняты следующие обозначения:
1 - цилиндрическая оболочка перфорированная;
2 - поплавок;
3 - гермоконтейнер с измерительным блоком;
4 - цепочка;
5 - якорь;
6 - кольцо;
7 - диск;
8 - груз;
9 - упругая вставка;
10 - всплывающий буй;
11 - фал;
12 - размыкатель;
13 - бункер:
14 - размыкающееся звено;
15 - якорный груз;
L1 - длина цилиндрической оболочки;
L2 - длина цепочки;
D - диаметр цилиндрической оболочки;

Предлагаемый инклинометр построен по модульному принципу. Каркасом модульной сборки может быть цилиндрическая оболочка 1, изготовленная из трубы с равномерно перфорированной поверхностью. Внутри оболочки 1 соосно размещены измерительный блок в гермоконтейнере 3 и модуль плавучести в виде поплавка 2. Для упрощения схемы, акселерометр и магнитный зонд размещаются в гермоконтейнере 3 на общей плате, и в этом же гермоконтейнере 3 размещаются батареи блока питания, обладающие собственным магнитным полем. Во избежание ошибок при определении ориентации прибора относительно магнитного поля Земли, плата с датчиками и батареи блока питания располагаются на противоположных концах гермоконтейнера 3, при этом расстояние между ними выбирается больше экспериментально определенного радиуса значимого воздействия на магнитный зонд магнитного поля батареи. Этой величиной определяется длина гермоконтейнера 3, а, следовательно, его объем и плавучесть, которая при большом весе начинки может оказаться отрицательной. В связи с этим возникает требование к обеспечению дополнительной плавучести, что достигается размещением внутри оболочки 1 поплавка 2.
Гермоконтейнер 3 и поплавок 2 закреплены внутри оболочки 1 с радиальным зазором неподвижно и соосно с помощью плоских колец и стяжных хомутов (не показаны). Радиальный зазор необходим для обеспечения проницаемости подвижной части прибора для набегающего потока жидкости, требуемой для подавления автоколебаний. Для регулировки чувствительности инклинометра, определяемой как приращение угла наклона подвижной части

Все элементы сборки выполнены из немагнитных материалов с учетом требований прочности при заданном гидростатическом давлении. При работе на малых глубинах преимущественно используются пластмассовые трубы, при больших давлениях - трубы из титановых или алюминиевых сплавов, а для изготовления монолитного поплавка в тех же габаритах для абиссальных глубин возможно использование сверхпрочного сферопластика, как это показано в прототипе на примере глубоководной модели Lowell ТСМ 5. В России производятся сферопластики различных типов, представляющие собой высокопрочные закрытоячеистые композиционные материалы, выдерживающие воздействие гидростатических давлений 100-750 атмосфер (http://www.компания-кондор.рф/vysokoprochnye-sferoplastiki/).
В варианте исполнения с положительной плавучестью (фиг. 2), подвижная часть прибора прикреплена с помощью гибкой связи, выполненной в виде цепочки 4, к неподвижному донному якорю 5. Цепочка состоит из нескольких звеньев, при этом верхнее звено неподвижно закреплено в центре нижней крышки гермоконтейнера 2, а нижнее - на донном якоре 5, что позволяет подвижной части прибора отклоняться от вертикали на достаточно большой угол




Сигнал акселерометра имеет две составляющие: условно постоянную, пропорциональную углу наклона


При исполнении предлагаемой модели в варианте с отрицательной плавучестью, подвижная часть прибора перевернута на 180° и подвешена с помощью цепочки 4 к арочной конструкции, как это показано на фиг. 5, при этом поплавок 2 не используется, а необходимая для работы перевернутого инклинометра отрицательная плавучесть обеспечивается весом свинцового кольца 8. Форма кольца выбрана для сохранения проницаемости оболочки в соответствии с требованием подавления автоколебаний. Максимальный момент силы отрицательной плавучести, балансирующий момент гидродинамической силы, достигается креплением кольца 8 в нижней части оболочки 1, например, с помощью стяжных капроновых хомутов (не показаны), однако, при этом могут возникнуть высокочастотные колебания в точке подвеса. Их можно избежать, переместив кольцо 8 ближе к точке подвеса и одновременно увеличив его массу, чтобы обеспечить тот же момент гидростатической силы. Арочная конструкция изготавливается из немагнитных материалов, обеспечивающих достаточную грузоподъемность и жесткость конструкции и устойчивость на течении. Последнее требование, как вариант, достигается использованием грузов 7, располагающихся через равные интервалы по периметру конструкции, касающемуся грунта. Высота точки подвеса определяется длиной L1 оболочки инклинометра, а также необходимостью зазора между инклинометром и дном, исключающим возможность касания дна с учетом неровностей и мягкости грунта. Оптимальное сочетание габаритов инклинометра с отрицательной плавучестью 0.5 кГ и несущей арки достигается при возвышении точки подвеса над дном 0.7 м и длине оболочки L1=0.45 м.
Описание применения предлагаемого измерителя скорости и направления придонных течений.
В соответствии с глубиной моря и предполагаемым диапазоном изменения скоростей выбирается вариант компоновки прибора: при умеренных скоростях - с положительной плавучестью и креплением к якорю 5 (фиг. 2, 4), при больших скоростях - с отрицательной плавучестью и постановкой на грунт в арочной конструкции (фиг. 3, 5).
Установка поплавка 2 и гермоконтейнера 3 в оболочке 1 выполняется с использованием плоских перфорированных колец 6, диска 7, расположение которых показано на фиг. 2. Для крепления к оболочке 1 используются одноразовые стяжные хомуты (не показаны), которые пропускаются через отверстия в кольцах 6, диске 7 и оболочке 1 с таким расчетом, чтобы после затягивания закладные модули оказались закрепленными без люфта. Гермоконтейнер 3 всегда крепится на срезе оболочки. При этом предусматривается возможность извлечения гермоконтейнера 3 из оболочки 1 и снятие крышки для работы с электроникой (программирование таймера, включение/выключение, скачивание данных) и замены батарей (заряда аккумуляторов) с последующим возвращением его на то же место. Извлечение поплавка 2 необходимо только для его переустановки на ином удалении от гермоконтейнера с целью изменения чувствительности прибора или для использования в варианте с отрицательной плавучестью; в этом случае к оболочке 1 крепится свинцовое кольцо 8 (фиг. 3, 5).
При использовании измерителя в варианте с положительной плавучестью (фиг. 1, 2, 4), цепочка 4, верхнее звено которой постоянно неподвижно прикреплено с помощью винта к крышке гермоконтейнера (фиг. 2, 3), неподвижно крепится нижним звеном к якорю с помощью стяжного одноразового хомута. При использовании модели в варианте с отрицательной плавучестью цепочка крепится к вершине арочной конструкции (фиг. 5). После этих операций прибор можно устанавливать на грунт для измерений, которые начнутся в заранее запрограммированный момент времени.
Для постановки и выборки измерителя предусматриваются дополнительные фалы, плавучести и якоря, сочетаемые тем или иным способом в зависимости от выбранного способа постановки и выборки. В любом случае вся дополнительная оснастка должна располагаться на дне таким образом, чтобы ни один ее элемент не мог соприкасаться с подвижной частью измерителя. Отказаться от дополнительной оснастки можно лишь в случае постановки измерителей аквалангистом. В иных случаях используются плавсредства. Учитывая малый вес измерителя, постановка выполняется без использования грузоподъемных устройств. Донная станция должно иметь два разнесенных якоря, соединенных фалом (грунтропом), что позволяет в простейшем случае (при малой глубине водоема) зацепить лежащий на дне грунтроп с помощью «кошки» и поднять за грунтроп всю станцию. Для постановки такой станции, необходимо обеспечить посадку измерителя на дно в правильной ориентации, для чего грунтроп крепится к якорю измерителя, и постановка выполняется при медленном дрейфе судна в следующей последовательности: 1) спуск измерителя на грунтропе до дна, 2) продолжение вытравливания грунтропа с расчетом, чтобы он с небольшим натяжением ложился на дно, 3) сброс на дно вспомогательного (отнесенного) якоря. Правильная ориентация измерителя обеспечивается тем, что подвижная часть прибора имеет положительную плавучесть. В случае отрицательной плавучести, предусматривающей использование арочной конструкции, постановка ведется в обратной последовательности: сначала опускается на дно отнесенный якорь, затем укладывается грунтроп, затем на вспомогательном фале, пропущенном вдвое через перекрестие арок, на дно опускается арочная конструкция, и вспомогательный фал за один конец вытягивается. Правильная вертикальная ориентация обеспечивается тем, что грунтроп крепится к нижней части арочной конструкции, утяжеленной грузами 7, а вспомогательный выхлестываемый фал удерживает конструкцию при спуске в вертикальном положении. Возможен вариант постановки без выхлестывания вспомогательного фала. В этом случае вспомогательный фал крепится к отнесенному якорю, а его верхний конец крепится к сигнальному бую, который остается в течение всего времени работы станции на поверхности моря, что облегчает поиск и подъем станции. Однако, в этом случае имеется риск хищения станции.
Наибольшие удобства и безопасность обеспечивает использование акустического размыкателя. Схема постановки с акустическим размыкателем представлена на фиг. 6. К отнесенному якорю 15 крепится дополнительное устройство с притопленным вытяжным буем 10, фалом 11 и бункером 13. Длина фала 11 превышает глубину моря, что позволяет бую 10 при всплытии подняться на поверхность моря. Коренной конец фала 10 проходит через днище бункера 13 и крепится к якорю 15. Буй 10 удерживается на дне размыкателем 12 со спусковым механизмом 14, который крепится к якорю 15. Собранная по схеме, показанной на фиг.6, станция устанавливается путем сбрасывания за борт. Необходимость длинного грунтропа в данном варианте отпадает, и вместо него для соединения якорей 15 и 5 используется укороченный фал длиной около 3 м, проходящий через трубку из упругого пластика, например, из ПХВ, которая обеспечит при достижении дна разнесение элементов донной станции по горизонтали на длину упругой вставки 9. Для подъема станции выполняется стандартная процедура размыкания с помощью акустического вызывного акустического устройства, при этом буй 10 всплывает на поверхность моря, вытягивая из бункера 13 фал 11, с помощью которого выбирается целиком вся станция, вручную или с помощью грузоподъемных механизмов произвольного типа.
Конкретные примеры использования инклинометрического измерителя скорости и направления течения.
Предлагаемая полезная модель подвергнута испытаниям в опытовом бассейне с буксировочной платформой и в натурных условиях.
В бассейне проводилась градуировка в интервале скоростей от 0 до 60 см/с, подтвердившая, что прибор обладает чувствительностью, достаточной для изучения течений в диапазоне, характерном для природных водоемов. Так, при скорости течения 20 см/с, которую можно считать характерной для глубоких водоемов, прибор настраивается так, чтобы изменение угла наклона составляли 4°/см⋅с-1, что обеспечивает порог чувствительности около 1 см/с; при скорости 40 см/с, характерной для динамически более активных прибрежных и присклоновых зон, для проливов, каналов и т.п., прибор настраивается так, чтобы изменение угла наклона составляло 1,5°/см⋅с-1, при этом надежно регистрируются скорости в диапазоне от 3-5 до 60-70 см/с. Одновременно был оценен эффект подавления автоколебаний за счет дросселирования потока с помощью перфорированной оболочки. Сравнивались сигналы двух приборов, отличающихся только наличием или отсутствием перфорации. На фиг. 7 воспроизведены углы отклонения оси прибора от вертикали в процессе трогания платформы с места, движения с постоянной скоростью 0.29 м/с и останова. Верхний график характеризует поведение измерителя с оболочкой в виде гладкого (не перфорированного) цилиндра, нижний - измерителя с перфорированной оболочкой. Для гладкой оболочки сигнал имеет выраженную квазипериодическую составляющую, обусловленную автоколебаниями с периодом около 1 сек с наложением более медленных флуктуаций. В результате вариации угла отклонения достигли 10° при среднем за прогон значении около 20°. Для перфорированного цилиндра наблюдались стабильный сигнал со слабыми флуктуациями, которые легко сгладить при обработке. Проведенный эксперимент свидетельствует о достижении эффекта подавления автоколебаний предложенным методом, а именно - дросселированием потока с помощью перфорированной оболочки.
Проверка работоспособности полезной модели проводилась в Черном море в условиях с ветрами переменной силы и направления с ожидаемым влиянием поверхностного волнения на придонное течение (фиг. 8, 9). Глубина моря - 27 м. На фиг. 8 представлена 2-недельная запись скорости в векторной форме (вверху), а также модуля скорости (средний график) и направления (внизу). Тонкими линиями показан первичный сигнал, в котором часто доминируют сравнительно быстрые флуктуации, рассмотреть которые можно только на растянутых фрагментах записей. Толстыми линиями на графиках показан временной ход осредненного модуля и направления скорости течения. Приведенный пример демонстрирует достаточную информативность предлагаемой модели для решения задач мониторинга прибрежной зоны моря, когда с изменениями синоптической ситуации возникают знакопеременные вдольбереговые течения, скорость которых меняется от нуля до 30 см/с, при этом надежно определяются моменты, когда средняя скорость обращается в нуль, но, как правило, остаются знакопеременные колебания скорости с периодами поверхностных волн. Пример таких колебаний приведен на 5-минутном фрагменте записи меридиональной и зональной составляющих скорости течений в штилевых условиях при наличии волн зыби (фиг. 9). Как видим, измеритель зарегистрировал знакопеременное течение с периодом колебаний около 6 сек и плавно меняющейся амплитудой в пределах от 1 до 3 см/с, при этом можно отметить практическое отсутствие шумового (непериодического) сигнала. Запись демонстрирует способность предлагаемой модели прибора корректно измерять слабые течения с порогом чувствительности около 1 см/с.
Таким образом, предлагаемый инклинометрический измеритель скорости и направления придонных течений позволяет без больших затрат повысить точность измерений по сравнению с измерителем, описанным в ближайшем аналоге, расширить диапазон измерений вблизи предела чувствительности, доведя ее до реального значения 1 см/с, и верхнего предела частотного диапазона, доведя его до 1 Гц, что не уступает дорогостоящим приборам аналогичного назначения. Тем самым открывается перспектива для исследования сложной пространственно-временной структуры полей придонных течений как слабых, так и сильных, требующего проведения синхронных измерений в большом числе точек, что практически невозможно при использовании известных стандартных измерителей течений.
Реферат
Полезная модель относится к области гидрометрии, в частности к океанографической технике, применяемой при исследовании пространственно-временной изменчивости течений в придонных слоях природных водоемов. Инклинометрический измеритель скорости и направления придонных течений содержит подвижную часть, в которой находится помещенный в герметичный контейнер измерительный блок. Измерительный блок включает трехкомпонентный акселерометр, трехкомпонентный магнитный зонд, электронный блок управления и накопления данных, таймер, источник электропитания. Измеритель снабжен средствами, обеспечивающими заданную плавучесть подвижной части, а также приспособлениями для крепления подвижной части с учетом заданной плавучести. Подвижная часть измерителя для демпфирования автоколебаний помещена в цилиндрическую оболочку. Оболочка выполнена с возможностью дросселирования набегающего потока жидкости. Оболочка может быть выполнена перфорированной. Повышает точность измерений. 1 з.п.ф-лы; 9 ил.
Комментарии