Способ и устройство для определения абсолютной скорости рельсового транспортного средства - RU2653767C1
Код документа: RU2653767C1
Чертежи

Описание
Область техники
Изобретение касается устройства и способа для определения абсолютной скорости рельсового транспортного средства, причем на этом транспортном средстве предусмотрены сенсорные устройства и устройство обработки сигналов.
Уровень техники
В рельсовых транспортных средствах в настоящее время скорость определяется за счет того, что измеряют частоту вращения колес с помощью ротора с выступающими полюсами и датчика, расположенного на роторе с выступающими полюсами, сигнал датчика подают на устройство обработки сигналов и там умножают на окружность колеса.
При этом известном методе оставляют без внимания то, что окружность колеса не является постоянной величиной, а изменяется во время эксплуатации вследствие износа или профилирования. Не учитывается также пробуксовывание между рельсом и колесом, что дополнительно искажает результат. В совокупности результат проведенного измерения скорости оказывается неточным.
Представление изобретения
Исходя из этого уровня техники задачей, положенной в основу данного изобретения, является создание устройства и способа для измерения абсолютной скорости рельсового транспортного средства с повышенной точностью.
Эта задача в отношении способа решается признаками независимого пункта 1 формулы изобретения, а в отношении устройства решается признаками независимого пункта 10 формулы. Предпочтительные варианты выполнения данного изобретения охарактеризованы в соответствующих зависимых пунктах формулы изобретения.
Данное изобретение основывается на том, что головка рельса, по которой движется колесо, не является идеально гладкой поверхностью, но во время движения качения каждое колесо вследствие неровностей испытывает колебательное возбуждение. Такое возбуждение испытывает сначала передняя в направлении движения вращающаяся ось, а затем - после некоторого интервала задержки - хвостовая ось тележки. Вследствие этого возникают два подобных эталонных сигнала, которые отличаются по существу временным сдвигом, который соответствует разнице по времени, которое необходимо колесным дискам, чтобы проехать отмеченную точку на рельсе. Если теперь эти подобные сигналы оценить с помощью современной процессорной системы, то можно очень точно рассчитать этот сдвиг по времени. Для того чтобы характеристические кривые сопоставить в подобных сигналах, известны разные методы обработки сигналов. Остальное сводится к простому вычислению, так как расстояние между обеими осями тележки или же между следующими друг за другом тележками в железнодорожном вагоне известно. В результате таким путем может быть просто и точно рассчитана абсолютная скорость рельсового транспортного средства.
Для того чтобы метрологически определить возбуждение осей колесной пары или, соответственно, колеса, могут быть привлечены различные физические величины, как например, пути, скорости, ускорения или производные от них величины, например их дифференциал или интеграл. Для определения этих физических величин для рельсового транспортного средства известны соответствующие сенсорные устройства. Под сенсорным устройством при этом следует понимать измерительный преобразователь с надлежащей первичной обработкой соответственно обрабатываемого сигнала датчика. В зависимости от конструкции этого измерительного преобразователя получается зависящий от направления параметр сенсора. В дальнейшем под направлением z следует понимать направление, вертикальное относительно рельсовой нитки; направление y обозначает латеральное направление, направленное сбоку от рельсовой нитки. Вследствие эквивалентной конусности в точке касания колеса с рельсом имеет место перекрестное воздействие возбуждения рельса в направлении z (вертикально) на движение колесной пары в направлении y (латерально), из-за чего измерительное направление может быть в направлении z и/или в направлении y. Это направление z является более предпочтительным, так как оно точнее отображает вертикальное движение рельса, однако за счет совместного использования сенсоров может быть полезнее с экономической точки зрения привлекать и указанное направление y для определения скорости. На рынке доступны сенсорные устройства, пригодные для использования на железной дороге.
Для того чтобы определить абсолютную скорость рельсового транспортного средства, предлагаемый изобретением способ включает в себя следующие этапы:
• определение неровностей рельса от каждой идущей впереди колесной пары посредством первого сенсорного устройства и по меньшей мере на одной последующей колесной паре посредством другого сенсорного устройства;
• передача произведенных этими сенсорными устройствами сигналов датчиков на устройство для обработки сигналов, которое выполнено с возможностью определения абсолютной скорости путем анализа подведенных сигналов датчиков, причем для этого используют временную позицию максимальной величины в коэффициентах фильтра рассчитанных передаточных функций между этими сигналами сенсоров.
Вследствие совместного применения сенсоров и/или из соображений более простого монтажа, и/или более простой прокладки кабеля может оказаться благоприятным, если используемые сенсоры размещены на рельсовом транспортном средстве в различных местах. В основном подходящими измерительными позициями являются позиции на буксовых коробках или непосредственно над первичной пружиной (попарно над тем же рельсом), или непосредственно над вторичной пружиной тележки. Вызываемое вибрациями ускорение определяется предпочтительно в направлении z. В общем эти ускорения тем меньше, чем дальше сенсоры удалены от позиции буксовой коробки (место возбуждения), так что в ближней области могут быть установлены более экономичные сенсоры. С другой стороны, это зависящее от скорости подобие будет тем незаметнее, чем больше удаление от позиции буксовой коробки. Для того чтобы скомпенсировать этот эффект, можно обратиться к эффективным методам обработки сигналов.
Может оказаться предпочтительным использование двух сенсорных устройств на каждой буксовой коробке различных колесных пар, которые попарно расположены над одним и тем же рельсом. При этом рассматриваемые колесные пары могут также принадлежать разным тележкам. Значение имеет только то, что известно расстояние между этими сенсорами, если смотреть вдоль рельса.
Может быть предпочтительным также, если возбуждение измеряется одновременно по обоим рельсам посредством датчиков буксовой коробки. При этом для определения временной задержки привлекаются возбуждения как правого, так и левого рельсов, за счет чего повышается точность и устойчивость к помехам.
Может быть также полезным, если эти сенсоры размещены над соответствующими ступенями упругости первичных пружин. За счет этого могут быть получены конструктивные и/или экономические преимущества, в частности, если совместно использовать сенсоры с другими системами. В отношении распределения сенсоров на тележках имеются точно такие же вариационные возможности, как и в отношении измерительной позиции «буксовая коробка».
Можно также размещать сенсоры на раме двух или более различных тележек. Также и здесь может определяться зависящая от скорости разность временных интервалов по сигналам возбуждения. При этом учитываемое расстояние "A" представляет собой расстояние от середины одной из попарно рассматриваемых тележек до середины другой тележки соответствующей пары тележек.
Дополнительно усовершенствование может быть достигнуто за счет того, что для определения абсолютной скорости привлекается комбинация из нескольких пар тележек, благодаря чему вследствие эффекта усреднения может быть дополнительно повышена точность измерения скорости.
В другом предпочтительном варианте выполнения может быть предусмотрено, что сенсоры размещаются в кузове вагона над двумя или более тележками. Преимуществом такого размещения является упрощенная прокладка кабеля и низкие механические требования к сенсорам, за счет чего такая система может быть реализована экономичнее. В отношении распределения сенсоров в кузове вагона над тележками предоставляются точно такие же вариационные возможности, как и в отношении измерительной позиции «середина рамы».
Одним методом определения временного сдвига может быть вычисление посредством взаимной корреляции. Значительное усовершенствование может быть, однако, достигнуто методами идентификации систем, как например, идентификации системы с помощью адаптивных фильтров, которые очень хорошо подходят для оценки имеющихся сигналов возбуждения. С помощью адаптивного фильтра при этом оценивается сигнал одного датчика с помощью другого сигнала датчика. При взаимном возбуждении датчиков движения, например одной пары сенсоров, которая расположена над одним и тем же рельсом, может быть оценен сигнал одного сенсора через сигнал другого сенсора. Адаптивный фильтр, применяемый для этой оценки, выдает в этом случае передаточную функцию (ÜTF), которая имеет явный максимум. Временная позиция этого максимума на передаточной функции (ÜTF) соответствует тогда временному сдвигу Δt между обоими сигналами. По этому временному сдвигу могут быть определены скорость (расстояние между сенсорами в направлении движения, деленное на временной сдвиг Δt) и направление движения (знак перед этим временным сдвигом). Расчет передаточной функции здесь может производиться как в частотном диапазоне, так и во временном диапазоне. Пригодные для использования на железной дороге вычислительные системы, такие как специальные процессоры для обработки сигналов, микроконтроллеры и микропроцессоры, доступны на рынке.
В смысле данного изобретения под термином передаточная функция (ÜTF) понимаются функциональные возможности фильтра, например функция самого по себе известного нерекурсивного фильтра, КИХ-фильтра (Finite Impulse Response - Filter), который сигнал одного сенсора наилучшим образом (в смысле минимальной суммы квадратичных ошибок) воспроизводит посредством сигнала другого сенсора. При анализе сигналов датчиков привлекается временная позиция указанной области абсолютного максимума в коэффициентах фильтра между этими сигналами датчиков.
Еще одно улучшение может быть обеспечено за счет определения общей передаточной функции по нескольким парам сенсоров. Такое определение может происходить, например, таким образом, что у одной тележки с 4 сенсорами буксовых коробок рассчитывается оптимальная общая передаточная функция (ÜTF), причем определяются следующие 4 передаточные пути: ось 1-справа на ось 2-справа (вперед ÜTF); ось 2-справа на ось 1-справа (назад ÜTF); ось 1-слева на ось 2-слева (вперед ÜTF); ось 2-слева на ось 1-слева (назад ÜTF). При передаточной функции назад (назад-ÜTF) временная зависимость инвертируется, чтобы эти 4 передаточные функции конструктивно накладывались друг на друга. Такой способ может быть распространен на сколь угодно большое количество передаточных путей, за счет чего может быть повышена как скорость вычислений, так и их точность. Таким образом при испытании данного изобретения на локомотиве удалось обеспечить надежное определение скорости со скоростью расчетов в 1 с и с точностью 0,2 м/с.
Данное изобретение касается также устройства для определения абсолютной скорости рельсового транспортного средства, содержащего:
- перовое сенсорное устройство, которое придано идущей впереди колесной паре рельсового транспортного средства, и по меньшей мере одно следующее сенсорное устройство, которое придано хвостовой колесной паре этого рельсового транспортного средства, и каждое из этих сенсорных устройств предназначено для того, чтобы определять неровности рельсов;
- устройство для обработки сигналов, на которое подаются сигналы отдельных сенсорных устройств, причем это устройство для обработки сигналов предназначено для того, чтобы выполнять анализ указанных сигналов датчиков и определять по ним абсолютную скорость, причем для этого используют временную позицию максимальной величины в коэффициентах фильтра рассчитанных передаточных функций между этими сигналами сенсоров.
Краткое описание чертежей
Для дальнейшего разъяснения данного изобретения в последующей части данного описания делается отсылка на прилагаемые чертежи, из которых можно почерпнуть другие предпочтительные варианты выполнения, подробности и модификации данного изобретения, и поясняются не ограничивающие объем притязаний примеры выполнения изобретения.
На чертежах показано следующее:
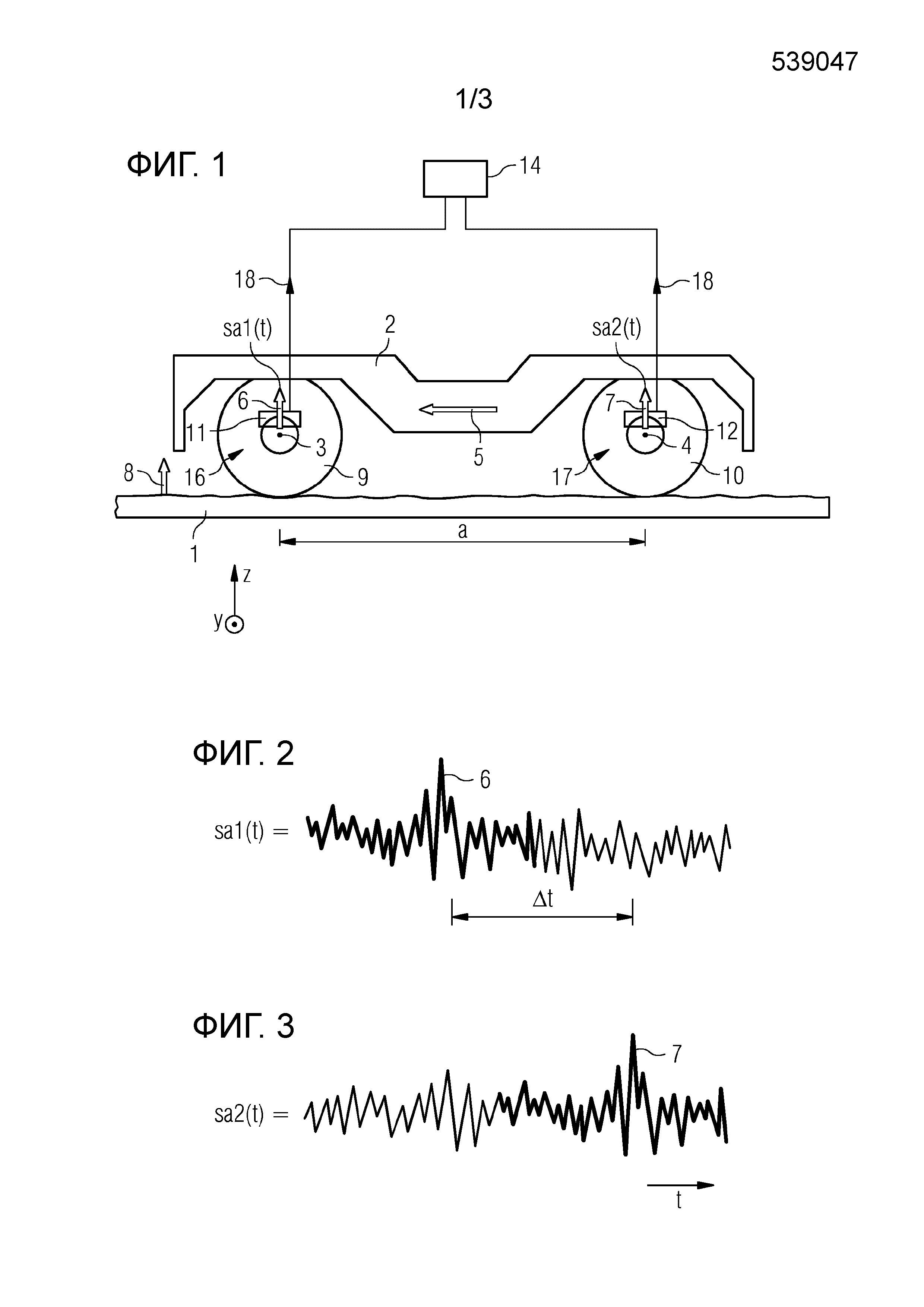
Фиг. 1 - схематичное изображение тележки с одной идущей впереди и одной хвостовой колесными парами, вид сбоку, причем в представленном примере выполнения сенсорные устройства установлены на буксовых коробках;
Фиг. 2 - первый сигнал возбуждения как функция времени, измеренный на идущей впереди колесной паре на Фиг. 1;
Фиг. 3 - второй сигнал возбуждения как функция времени, измеренный на хвостовой колесной паре на Фиг. 1;
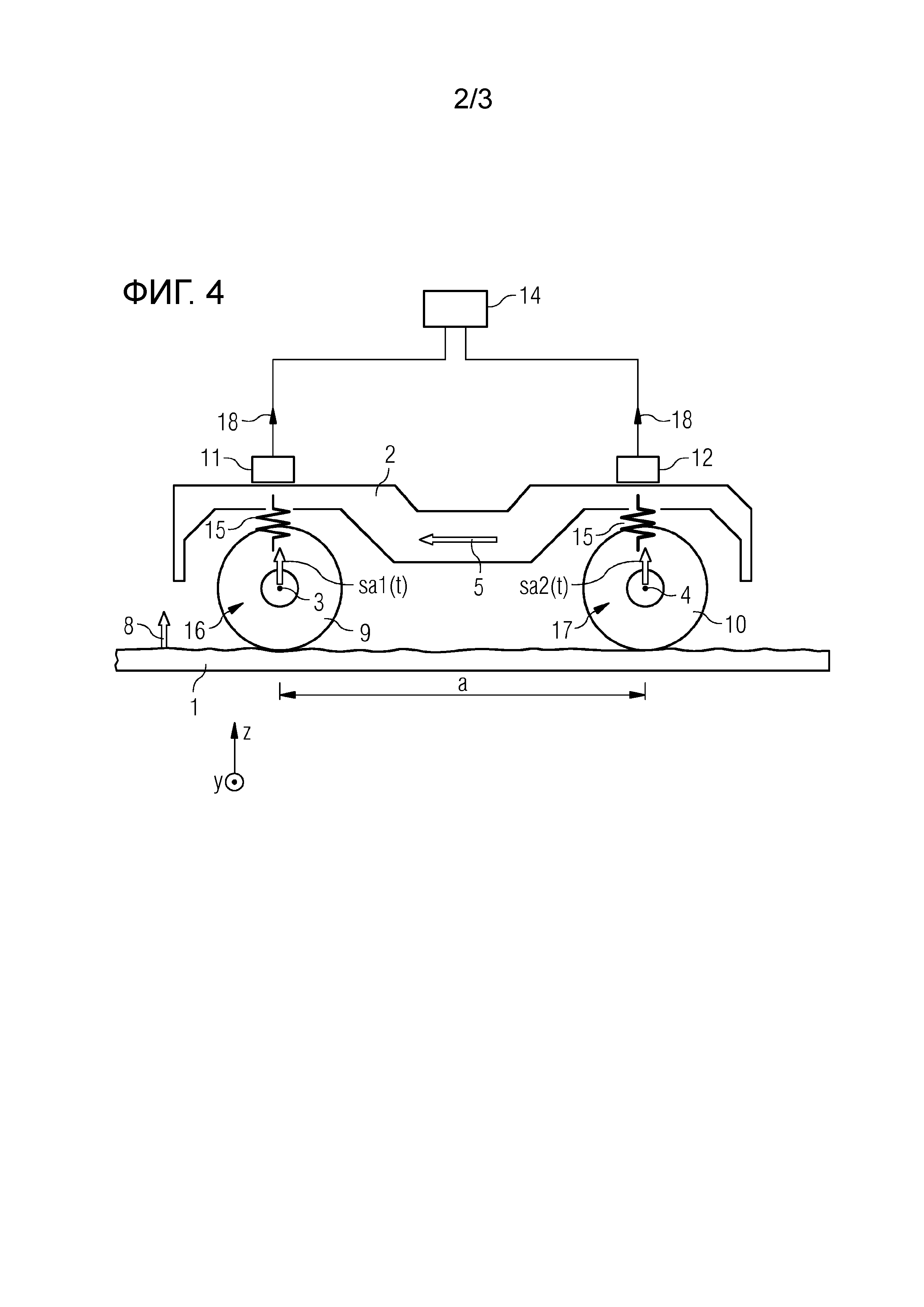
Фиг. 4 - один пример выполнения данного изобретения, при котором на одной тележке установлено сенсорное устройство, на раме тележки над первичной пружиной буксовых коробок колесных пар;
Фиг. 5 - другой пример выполнения данного изобретения, при котором измерительная позиция размещена в кузове вагона соответственно над серединой тележки, причем для определения абсолютной скорости учитываются несколько таких измерительных устройств.
Выполнение изобретения
На Фиг. 1 показана в упрощенном представлении тележка 2 не показанного подробнее рельсового транспортного средства. На находящейся в направлении движения впереди колесной паре 16 и на хвостовой колесной паре 17 попарно расположены колеса 9, 10. Эти колесные пары по отношению друг к другу имеют межосевое расстояние "a". Как представлено на верхней части Фиг. 1, поверхность катания рельса 1 является неровной. На Фиг. 1 направление движения проходит справа налево. Таким образом, когда переднее колесо 9 проезжает по неровности, хвостовое колесо следует со смещение во времени. Эти неровности вызывают колебательные возбуждения, которые оцениваются метрологически. Как показано на Фиг. 1, каждой буксовой коробке придано сенсорное устройство: передней оси придано сенсорное устройство 11, а задней оси придано сенсорное устройство 12. Эти сенсорные устройства 11, 12 в зависимости от выполнения могут отображать в зависимости от направления различные физические параметры, как например: путь, скорость, ускорение, или, соответственно, производные от них величины, например их дифференциал или интеграл. В отношении рельсовой нитки под направлением z следует понимать вертикальное направление, а под направлением y - латеральное направление. Оба сенсорных устройства вырабатывают соответственно по одному сигналу 18 датчика, который подается на устройство 14 для обработки и оценки сигналов. По существу, оно состоит из пригодной для использования на железной дороге цифровой процессорной системы. Алгоритм, готовый к выполнению на этой процессорной системе, определяет подобие по обоим по времени следующим друг за другом сигналам 18 датчиков. В данном примере это алгоритм для расчета передаточной функции (ÜTF) с помощью адаптивного фильтра, причем этот расчет может производиться как во временном диапазоне, так и в частотном диапазоне. КИХ-фильтр наилучшим образом воспроизводит при этом сигнал одного датчика посредством сигнала другого датчика, при этом получается наименьшая сумма квадратичных ошибок. Результатом сравнения является искомое запаздывание по времени Δt (см. Фиг. 2 и Фиг. 3).
На Фиг. 2 и Фиг. 3 показаны в качестве примера вызываемые неровностями между рельсами измерительными сигналами как функция времени: на переднем колесе 3 измеряется сигнал 6 возбуждения (эталонный сигнал «sa1(t)» на Фиг. 2), на заднем колесе 4 измеряется сигнал 7 возбуждения (эталонный сигнал «sa2(t)» на Фиг. 3). Оба сигнала 6, 7 по своему временному характеру подобны и по существу сдвинуты на интервал Δt. Если это временное запаздывание Δt установлено после вычисления подобия, то с привлечением известного расстояния „a" между осями 3, 4 колес 9, 10 фактическая скорость рельсового транспортного средства очень легко определяется путем вычисления отношения v=a/Δt (где v - абсолютная скорость; a - межосевое расстояние; Δt - временное запаздывание).
На Фиг. 4 показан один вариант выполнения данного изобретения, при котором на тележке 2 сенсоры 11, 12 локально размещены над первичной ступенью 15 упругости. Принцип здесь такой же, как и представленный выше. Определяемые обоими этими сенсорами 11, 12 сигналы возбуждения (на Фиг. 2 и Фиг. 3 эталонные сигналы «sa1(t)» и «sa2(t)») подаются как сигнал 18 на устройство 14 для обработки и оценки сигналов, которое в свою очередь определяет временное запаздывание Δt и с использованием приведенного выше отношения вычисляет фактическую скорость рельсового транспортного средства.
На Фиг. 5 показан другой пример выполнения данного изобретения. Здесь каждое из обоих сенсорных устройств 11 и 12 установлено в кузове 13 вагона, причем каждый из этих кузовов 13 вагонов находится на передней тележке 2 и, соответственно, на задней тележке 2'. Между обоими этими тележками 2,2' в железнодорожном вагоне могут быть установлены дополнительные тележки. Каждый сигнал 18, произведенный измерительными устройствами 11 и 12, снова подается на устройство 14 для обработки и оценки сигналов. По уже известному алгоритму анализа сигналов оно опять-таки определяет временное запаздывание Δt между сигналами 6, 7. В отличие от представленного на Фиг. 1 и Фиг. 4 в данном примере для определения абсолютной скорости v используется расстояние „A" между обеими тележками 2, 2'.
Перечень ссылочных обозначений
1 - рельс
2, 2' - тележка
3 - передняя ось колеса
4 - задняя ось колеса
5 - скорость
6 - сигнал возбуждения на идущем впереди колесе
7 - сигнал возбуждения на хвостовом колесе
8 - неровность рельса
9 - колесо (идущее впереди)
10 - колесо (идущее позади)
11 - сенсорное устройство
12 - сенсорное устройство
13 - кузов вагона
14 - устройство для обработки сигналов
15 - первичная пружина
16 - идущая впереди колесная пара
17 - хвостовая колесная пара
18 - сигнал датчика
a - межосевое расстояние
A - расстояние между следующими друг за другом тележками
Δt - временной интервал, запаздывание
V - абсолютная скорость
Z - вертикальное направление
y - латеральное направление
ÜTF - передаточная функция
Реферат
Группа изобретений относится к способу и устройству для определения скорости рельсового транспортного средства. Способ определения скорости рельсового транспортного средства, при котором на этом транспортном средстве предусматривают сенсорные устройства и устройство для обработки сигналов, причем способ включает в себя следующие этапы: определение неровностей рельса соответственно на одной идущей впереди колесной паре посредством первого сенсорного устройства и по меньшей мере на одной хвостовой колесной паре посредством еще одного сенсорного устройства; передача произведенных сенсорными устройствами сигналов датчиков на устройство для обработки сигналов, которое выполнено для того, чтобы проводить анализ подведенных сигналов датчиков и на основании этого определять скорость, причем для этого производится оценка передаточной функции от одного сенсора к другому. Технический результат – повышение точности определения скорости рельсового транспортного средства. 2 н. и 14 з.п. ф-лы, 5 ил.
Комментарии