Способ измерения времени пролета метаемым телом мерной базы и устройство для его осуществления - RU2698531C1
Код документа: RU2698531C1
Чертежи
Описание
Изобретения относятся к испытательной технике, а именно к внешнетраекторной регистрации параметров пролета метаемого объекта (МО) на участках промежуточной и внешней баллистики, при осколочных и пулеосколочных испытаниях.
Известны способ измерения времени пролета метаемым телом мерной базы и устройство измерения времени пролета мерной базы метаемым телом при испытаниях стрелкового и спортивно - охотничьего оружия и боеприпасов к ним в экспериментальной баллистике, реализуемые при использовании патента РФ №2089917, МПК6 G01P 3/66, опубл. 10.09.1997, «Устройство для измерения скорости полета пули и снаряда».
Данное устройство содержит два кольцевых магнитоиндукционных датчика, сигнальные обмотки, которые охвачены витком из магнитомягкого материала, разнесенные на базовое расстояние вдоль траектории полета, схему формирования импульсов, два одновибратора, инвертор, измеритель временных интервалов и вычислитель, нормирующий усилитель, нуль-орган, и схему совпадения. Сигнальные обмотки магнитоиндукционных датчиков подключены к входу первого одновибратора через последовательно соединенные нормирующий усилитель и нуль-орган (схему обнуления), выход первого одновибратора соединен с первым входом измерителя временных интервалов, со вторым входом второго одновибратора и с первым входом схемы совпадения, второй вход которой соединен с выходом второго одновибратора, а выход схемы совпадения через инвертор подключен к второму входу измерителя временных интервалов, выход которого соединен с вычислителем, выход которого связан с установочным входом измерителя временных интервалов. Магнитоиндукционные датчики установлены на трубе из немагнитного и неэлектропроводного материала и помещены в металлический кожух, причем корпус каждого из них выполнен из изоляционного материала, витки сигнальных обмоток датчиков изолированы от корпусов прокладкой из упругого неэлектропроводного материала.
Недостатком данных способа и устройства является то, что обмотки магнитоиндукционных датчиков запитываются постоянным током большой величины при малых значениях пульсации напряжения, что накладывает ограничение на длину питающей линии к испытательной технике, что важно при испытаниях на участках пролета МО промежуточной и внешней баллистики при пулеосколочных испытаниях. Это приводит к значительным затратам на материалы, усложняет их изготовление и требует задействования мощных источников энергии.
Известны способ измерения времени пролета метаемым телом мерной базы и устройство измерения времени пролета мерной базы метаемым телом, описанные в патенте РФ №2525687, МПК12 G01P 3/66, F42B 35/00, опубл. 23.06.2014, «Способ запуска регистрирующих систем и измеритель средней скорости метаемого объекта», выбранные в качестве прототипа для заявляемых способа и устройства. Способ включает установку по траектории полета метаемого объекта в начале и конце мерной базы индукционных датчиков, регистрацию моментов времени пролета первого и второго измерительных сечений и времени пролета объектом мерной базы, формирование сигнала на запуск хронографических регистрирующих систем после пролета метаемым объектом первого измерительного сечения. Индукционные датчики выполняют содержащими полесоздающие и полевоспринимающие устройства, установленные в измерительных сечениях напротив друг друга с возможностью пролета между ними метаемого объекта, в числе регистрирующих систем дополнительно запускают фотовидео-регистрирующую систему, которую размещают на расстоянии от второго измерительного сечения, равном или меньшем длины мерной базы, а формирование сигнала на запуск фотовидеорегистрирующей системы производят с синхронизацией по заданным координатам траектории полета в единой шкале времени проведения измерений с задержкой по времени относительно импульса поджига заряда метательной установки, равной времени пролета метаемым объектом мерной базы. Измеритель состоит из первого и второго индукционных датчиков, регистрирующих момент времени пролета метаемым объектом первого и второго измерительных сечений мерной базы. Датчики жестко закреплены в фиксирующих сечениях перпендикулярно направлению движения МО в едином каркасе, выполненном с возможностью перемещения вдоль траектории полета метаемого объекта. Каждый индукционный датчик выполнен содержащим полесоздающее (постоянный магнит) и полевоспринимающее (катушка индуктивности) устройства, установленные в измерительных сечениях и напротив друг друга с возможностью пролета между ними метаемого объекта. Измеритель также содержит счетное устройство, первую, вторую и третью схемы согласования, первый и второй формирователи импульсов, схему переключения режима, генератор тактовых импульсов, схему обнуления, схему совпадения «И», первый и второй идентичные расширители импульсов, первый, второй и третий выходные каскады, адаптер связи ПЭВМ, цифровое табло (для отображения скорости пролета МО через фиксирующие сечения), ПЭВМ.
Недостатком данных способа и устройства измерения времени пролета мерной базы метаемым телом является то, что рабочий зазор, а именно, расстояние между индукционными датчиками и полесоздающими устройствами в измерительных сечениях на практике не превышает 100 мм, что не позволяет регистрировать пролет крупноразмерных метаемых объектов и определять их скорость при пулеосколочных испытаниях. Вместе с тем, при использовании указанных способа и устройства индукционные датчики и полесоздающее устройство устанавливают на кольце из немагнитного, неэлектрического, труднообрабатываемого и дорогого материала.
Таким образом, вся совокупность этих факторов приводит не только к увеличению магнитных потоков рассеяния, уменьшению магнитного поля в рабочем зазоре, снижению чувствительности датчиков и уменьшению КПД магнитной системы, но и вносит погрешность, снижает точность измерения, а так же приводит к значительным затратам на материалы и усложняет их изготовление.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание способа и устройства, обеспечивающих измерение времени пролета крупноразмерным метаемым телом мерной базы, определение средней скорости метаемого тела (МТ) и запуск регистрирующей аппаратуры от сигнала, сформированного при пролете измерительных сечений.
Технический результат - бесконтактная фиксация по времени местоположения крупнокалиберных МТ в начале и конце мерной базы (время - пролетным способом), исключение магнитных потоков рассеяния, увеличение магнитного поля в рабочем зазоре, повышение чувствительности датчиков и увеличение КПД магнитной системы, а также повышение надежности и точности хронографирования, снижение сложности изготовления.
Указанный технический результат достигается за счет того, что в заявляемом способе, включающем установку по траектории полета метаемого тела в начале и конце мерной базы индукционных измерительных сечений, содержащих полесоздающее и полевоспринимающее устройства, регистрацию моментов времени пролета метаемым телом мерной базы, формирование сигналов на запуск регистрирующих систем, в отличие от прототипа полесоздающее и полевоспринимающее устройства устанавливают попарно в индукционных сечениях напротив друг друга в ортогональных плоскостях с возможностью пролета между ними крупноразмерного метаемого тела, при этом формирование сигнала на запуск всех регистрирующих систем производят при пролете метаемым телом измерительных сечений мерной базы.
Указанный технический результат достигается также за счет того, что в заявляемом устройстве измерения времени пролета мерной базы МТ, содержащем электрически соединенные с регистрирующими системами индукционные датчики, содержащие каждый одно полесоздающее и одно полевоспринимающее устройства, установленные в измерительных сечениях напротив друг друга перпендикулярно направлению движения метаемого тела с возможностью пролета между ними метаемого тела, жестко закрепленные в едином каркасе, выполненном с возможностью перемещения вдоль траектории полета метаемого тела, схему совпадения, в отличие от прототипа в устройство введены четыре фильтра нижних частот, четыре схемы смещения нулевого уровня, четыре аналого-цифровых преобразователя, четыре корректирующие цепи, четыре формирователя импульсов, две схемы «ИЛИ», два усилителя сигнала, блок питания., регистратор аналоговых сигналов; каркас выполнен из ферромагнетика, четыре индукционных датчика закреплены попарно в ортогональных плоскостях индукционных сечений.
Первое полевоспринимающее устройство первого измерительного сечения, первый фильтр нижних частот, первая схема смещения нулевого уровня, первый аналого-цифровой преобразователь, первая корректирующая цепь, первый формирователь импульсов, первый вход первой схемы «ИЛИ» соединены последовательно, первый выход первой схемы «ИЛИ» подключен к входу первого усилителя сигнала, выход которого соединен с входом первой регистрирующей системы.
Второе полевоспринимающее устройство первого измерительного сечения, второй фильтр нижних частот, вторая схема смещения нулевого уровня, второй аналого-цифровой преобразователь, вторая корректирующая цепь, второй формирователь импульсов, второй вход первой схемы «ИЛИ» соединены последовательно, второй выход первой схемы «ИЛИ» подключен к первому входу схемы совпадения «И», выход которой подключен к входу второго усилителя сигнала, выход которого подключен к входу второй регистрирующей системы.
Первое полевоспринимающее устройство второго измерительного сечения, третий фильтр нижних частот, третья схема смещения нулевого уровня, третий аналого-цифровой преобразователь, третья корректирующая цепь, третий формирователь импульсов, первый вход второй схемы «ИЛИ» соединены последовательно, выход второй схемы ИЛИ соединен с вторым входом схемы совпадения «И».
Второе полевоспринимающее устройство второго измерительного сечения, четвертый фильтр нижних частот, четвертая схема смещения нулевого уровня, четвертый аналого-цифровой преобразователь, четвертая корректирующая цепь, четвертый формирователь импульсов, второй вход второй схемы «ИЛИ» соединены последовательно, выходы первой, второй, третьей и четвертой схем смещения нулевого уровня также подключены к первому, второму, третьему и четвертому каналам регистратора аналоговых сигналов соответственно.
Каркас измерительных сечений может быть выполнен в виде квадратов из ферромагнетика.
Применение всей совокупности признаков заявляемых способа и устройства позволяет при пулеосколочных испытаниях обеспечить бесконтактную регистрацию моментов пролета крупноразмерным метаемым телом измерительных сечений, определяющих начало и конец мерной базы, что позволяет обеспечить определение средней скорости метаемого тела, ускорения, координат, уравнения движения даже с отклонением тела от заданной траектории, позволяет формировать сигнал на запуск регистрирующих систем, при этом формирование указанного сигнала с синхронизацией запуска к траектории полета метаемого тела, без задержки по времени относительно сигнала, сформированного при пролете измерительных сечений, позволяет повысить надежность и точность фиксации на аэробаллистическом участке полета метаемого тела.
Жесткое закрепление в датчиков в измерительных сечениях в ортогональных плоскостях перпендикулярно направлению движения метаемого тела в едином каркасе, выполненном с возможностью перемещения вдоль траектории полета метаемого тела, позволяет точно зафиксировать датчики и перемещать их в случае необходимости по баллистической трассе без трудоемкой переустановки, что повышает точность и надежность регистрации.
Наличие схем смещения нулевого уровня обеспечивают одновременно блокировку аналого-цифровых преобразователей, корректирующих цепей и формирователей импульсов от несанкционированного формирования управляющего сигнала, а также синхронизирует работу этих устройств. Это обеспечивает синхронизацию запуска регистрирующих систем с моментом пролета метаемым телом измерительных сечений.
Установка попарно индукционных датчиков в ортогональных плоскостях измерительных сечений на мерной базе позволяет обеспечить надежное измерение параметров МТ, а также исключает потерю механизма формирования полезного сигнала, а именно, характеристик функций отклика от датчиков при механическом повреждении их и отклонении от траектории пролета МТ, что позволяет повысить надежность и точность измерения.
Выполнение каркаса из ферромагнетика приводит к повышению чувствительности датчиков и увеличению КПД магнитной системы, уменьшению потоков рассеяния. Установка четырех индукционных датчиков попарно жестко в ортогональных плоскостях индукционных сечений в виде квадратов из ферромагнетика, исключает необходимость замера не только рабочего зазора между индукционными датчиками и полесоздающими устройствами, но и расстояния между измерительными сечениями, снижает сложность изготовления.
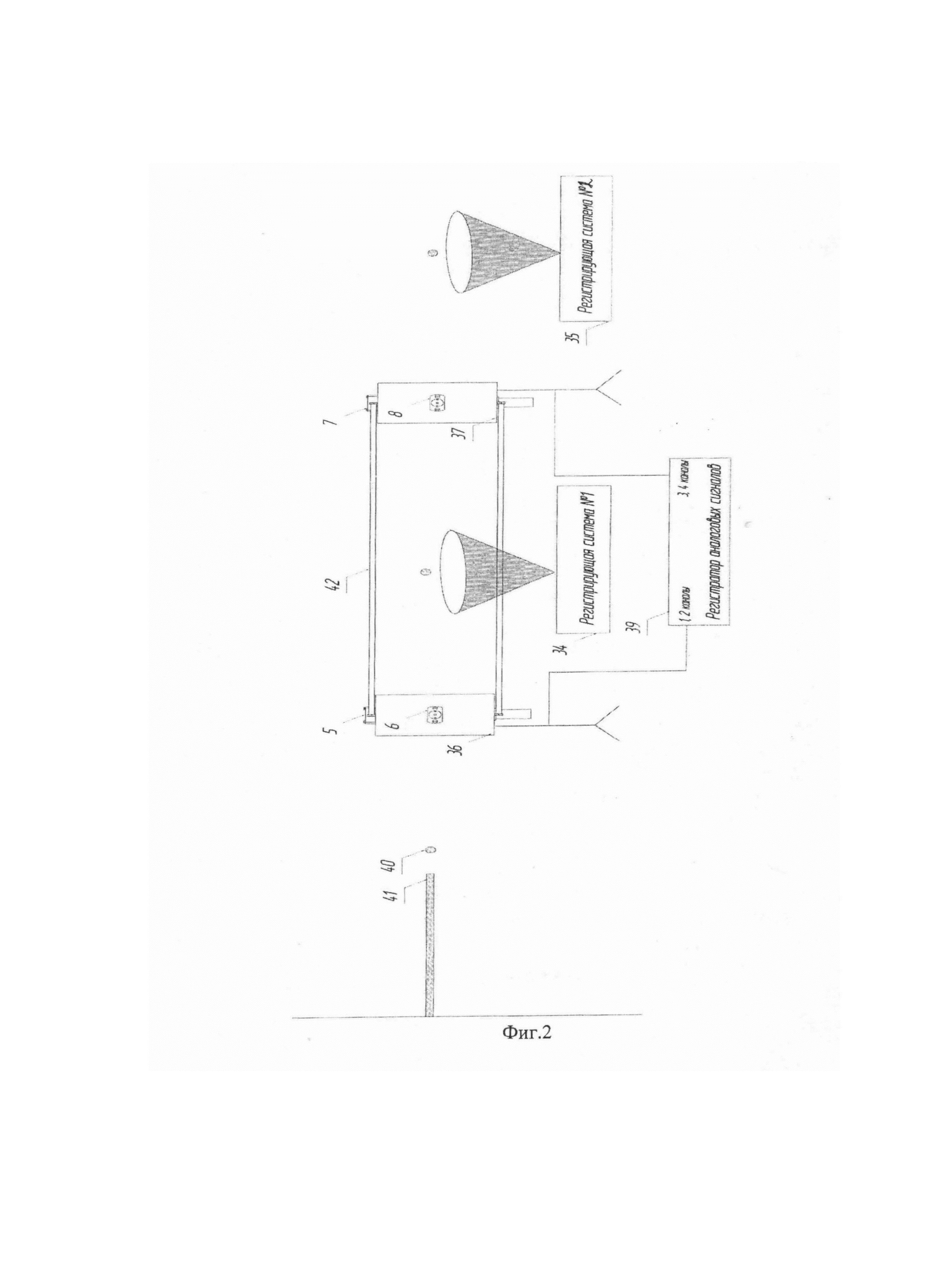
Заявляемые способ и устройство поясняются следующими чертежами: на фиг. 1 - приведена схема устройства измерения времени пролета мерной базы метаемым телом, на фиг. 2 - схематично показано размещение измерительных сечений измерительной базы и регистрирующей аппаратуры на баллистической трассе для пулеосколочных испытаний.
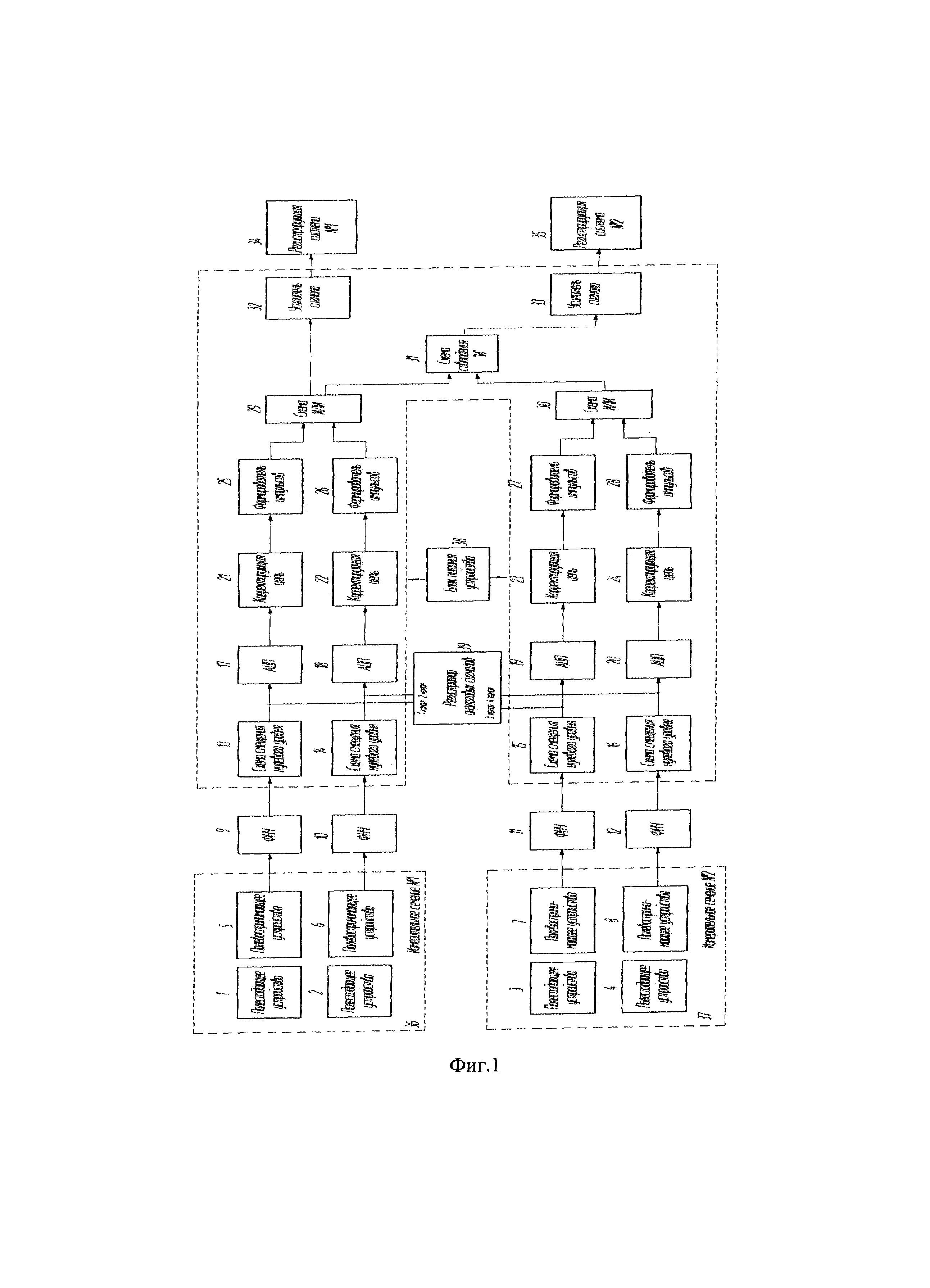
Устройство измерения времени пролета метаемым телом мерной базы (Фиг. 1) состоит из электрически соединенных с регистрирующими системами 34 и 35 (в данном примере выполнения рентгеновские аппараты), индукционных датчиков содержащих каждый одно полесоздающее (постоянный магнит) 1, 2, 3, 4 и одно полевоспринимающее устройства (катушка индуктивности) 5, 6, 7, 8 соответственно. Индукционные датчики закреплены попарно в ортогональных плоскостях в измерительных сечениях 36 и 37 напротив друг друга перпендикулярно направлению движения метаемого тела с возможностью пролета между ними метаемого тела 40, жестко закреплены в едином каркасе 42 из ферромагнетика, выполненном с возможностью перемещения вдоль траектории полета метаемого тела 40.
Также устройство измерения времени пролета метаемым телом мерной базы содержит первый 9, второй 10, третий 11 и четвертый 12 фильтры нижних частот, первую 23, вторую 14, третью 15 и четвертую 16 схемы смещения нулевого уровня, первый 17, второй 18, третий 19 и четвертый 20 аналого-цифровые преобразователи, первую, вторую, третью и четвертую идентичные корректирующие цепи 21, 22, 23 и 24 соответственно, четыре идентичных формирователя импульсов 25, 26, 27 и 28 соответственно, первую 29 и вторую 30 схемы «ИЛИ», два усилителя сигнала 32 и 33, схему совпадения «И» 31.
В состав заявляемого устройства входят блок 38 питания устройства, регистратор аналоговых сигналов 39.
Блок 38 питания устройства устанавливают непосредственно рядом с каркасом 42 мерной базы, на которой размещены измерительные сечения с индукционными датчиками.
В каркасе 42, на котором размещены индукционные датчики, для крепления элементов используют шпильки с резьбой, что позволяет при необходимости мобильно изменять измерительную базу с точностью, равной шагу резьбы непосредственно в ходе проведения измерений.
Каркас измерительных сечений выполнен из ферромагнетика. Установка четырех индукционных датчиков попарно жестко в ортогональных плоскостях индукционных сечений в виде квадратов из ферромагнетика исключает необходимость замера не только рабочего зазора между индукционными датчиками и полесоздающими устройствами, но и расстояния между измерительными сечениями
Первое полевоспринимающее устройство 5 первого измерительного сечения 36, первый фильтр 9 нижних частот, первая схема 13 смещения нулевого уровня, первый аналого-цифровой преобразователь 17, первая корректирующая цепь 21, первый формирователь импульсов 25, первый вход первой схемы «ИЛИ» 29 соединены последовательно, первый выход первой схемы «ИЛИ» 29 подключен к входу первого усилителя 32 сигнала, выход которого соединен с входом первой регистрирующей системы 34.
Второе полевоспринимающее устройство 6 первого измерительного сечения 36, второй фильтр 10 нижних частот, вторая схема 14 смещения нулевого уровня, второй аналого-цифровой преобразователь 18, вторая корректирующая цепь 22, второй формирователь 26 импульсов, второй вход первой схемы «ИЛИ» 28 соединены последовательно. Второй выход первой схемы «ИЛИ» 29 подключен к первому входу схемы 31 совпадения «И», выход которой подключен к входу второго усилителя 33 сигнала, выход которого подключен к входу второй регистрирующей системы 35.
Первое полевоспринимающее устройство 7 второго измерительного сечения 37, третий фильтр 11 нижних частот, третья схема 15 смещения нулевого уровня, третий аналого-цифровой преобразователь 19, третья корректирующая цепь 23, третий формирователь импульсов 27, первый вход второй схемы «ИЛИ» 30 соединены последовательно. Выход второй схемы «ИЛИ» 30 соединен с вторым входом схемы совпадения «И».
Второе полевоспринимающее устройство 8 второго измерительного сечения 37, четвертый фильтр 12 нижних частот, четвертая схема 16 смещения нулевого уровня, четвертый аналого-цифровой преобразователь 20, четвертая корректирующая цепь 24, четвертый формирователь импульсов 28, второй вход второй схемы «ИЛИ» 30 соединены последовательно.
Выходы первой 13, второй 15, третьей 14 и четвертой 16 схем смещения нулевого уровня также подключены к первому, второму, третьему и четвертому каналам регистратора 39 аналоговых сигналов соответственно.
Заявляемый способ измерения времени пролета метаемым телом мерной базы осуществляется при работе заявляемого устройства следующим образом.
При пролете крупноразмерным метаемым телом 40, вылетевшим из ствола 41 метательной установки, через первое измерительное сечение (ИС) 36, в полевоспринимающих устройствах 5 и 6 вырабатываются сигналы, которые одновременно поступают на первый 9 и второй 10 фильтры нижних частот и соответственно, первую 13 и вторую 14 схемы смещения нулевого уровня. Одновременно сигналы поступают на первый и второй каналы регистратора 39 аналоговых сигналов для их регистрации и далее на первый 17 и второй 18 аналого-цифровые преобразователи, затем на две корректирующие цепи 21 и 22, первый 25 и второй 26 формирователи импульсов, первый и второй входы схемы «ИЛИ» 29 соответственно, затем на вход первого усилителя сигнала 32. Одновременно с этим, сигнал с второго выхода первой схемы «ИЛИ» 29 поступает на первый вход схемы совпадения «И» 31.
Первый усилитель 32 сигнала усиливает управляющий импульс до величины, необходимой для устойчивого запуска первой 34 регистрирующей системы (электрические параметры импульса устанавливаются исходя из технических характеристик сигналов запуска всех применяемых систем) и далее этот нормированный импульс поступает на вход первой регистрирующей системы 34 для ее запуска.
Второе измерительное сечение работает аналогично первому.
При пролете крупноразмерным метаемым телом 40, вылетевшим из ствола 41 метательной установки, через второе измерительное сечение (ИС) 37, в полевоспринимающих устройствах 7 и 8 вырабатываются сигналы, которые одновременно поступает на третий и четвертый фильтры нижних частот 11 и 12 соответственно, третью 15 и четвертую 16 схемы смещения нулевого уровня.
Одновременно сигналы поступают на третий и четвертый каналы регистратора 39 аналоговых сигналов для их регистрации и далее на третий и четвертый аналого-цифровые преобразователи 19 и 20, две корректирующие цепи 23 и 24, третий 27 и четвертый 28 формирователи импульсов, первый и второй соответствующие входы схемы «ИЛИ» 30, второй вход схемы совпадения «И» 31 и затем на вход второго усилителя сигнала 33. После усиления этот нормированный импульс поступает на вход второй регистрирующуей системы 35 для ее запуска.
Схемы смещения нулевого уровня 13, 14, 15 и 16 осуществляют смещение начальных уровней сигналов с полевоспринимающих устройств 5, 6, 7 и 8 соответственно на нормированное значение напряжения для повышения помехоустойчивости устройства. Корректирующие цепи 21, 22, 23 и 24 выполняют функцию коррекции формы управляющего сигнала.
Таким образом, решается техническая задача измерения времени пролета метаемым телом мерной базы, определения средней скорости МТ и запуск регистрирующей аппаратуры от сигнала, сформированного при пролете первого и второго измерительных сечений (индукционных сечений) мерной базы, а также повышается надежность и точность измерений.
Реферат
Группа изобретений относится к испытательной технике, а именно к внешнетраекторной регистрации параметров пролета метаемого тела (МТ) на участках промежуточной и внешней баллистики, при осколочных и пулеосколочных испытаниях. Способ включает установку по траектории полета метаемого тела в начале и конце мерной базы в измерительных сечениях индукционных датчиков, содержащих полесоздающее и полевоспринимающее устройства, регистрацию моментов времени пролета метаемым телом мерной базы, формирование сигналов на запуск регистрирующих систем. Полесоздающее и полевоспринимающее устройства устанавливают попарно в индукционных сечениях напротив друг друга в ортогональных плоскостях с возможностью пролета между ними крупноразмерного метаемого тела, при этом формирование сигнала на запуск всех регистрирующих систем производят при пролете метаемым телом измерительных сечений мерной базы. Технический результат - повышение надежности и точности измерений. 2 н. и 1 з.п. ф-лы, 2 ил.
Комментарии