Система для определения числа оборотов и направления вращения вращающегося конструктивного элемента - RU2701790C2
Код документа: RU2701790C2
Чертежи
Описание
Изобретение относится к системе для бесконтактного определения числа оборотов и направления вращения вращающегося во время эксплуатации конструктивного элемента, в частности, намагничиваемого вала автомобиля.
Из уровня техники известны различные датчики частоты вращения для определения числа оборотов вращающегося во время эксплуатации конструктивного элемента. Такие датчики частоты вращения используются, например, для регистрации числа оборотов и направления вращения зубчатого колеса или передаточного вала в коробке передач автомобиля.
Для бесконтактной регистрации числа оборотов, как правило, используются датчики частоты вращения, которые оснащены датчиком магнитного поля (например, датчиком Холла). При этом магнитом в области датчиков Холла создается магнитное поле, которое при прохождении зубца зубчатого колеса изменяется. При этом сначала датчик Холла однократно регистрирует так называемое базовое поле магнита. К этой напряженности базового поля еще дополнительно прибавляется напряженность поля, происходящая от массы зубчатого колеса или сопоставимого конструктивного элемента. В этом случае если с датчиком вместо впадины между зубьями согласован зубец, то на время согласования зубца с датчиком это приводит к повторному усилению магнитного поля. Таким образом, если зубчатое колесо вращается, то происходит колебание напряженности поля в зависимости от прохождения зубьев и впадин между зубьями мимо датчика. Таким образом, датчики Холла регистрируют это изменение магнитного поля и генерируют электрические сигналы, из которых можно определять число оборотов или установочный угол зубчатого колеса. Таким образом, каждый зубец дает в итоге импульс, и посредством подсчета импульсов можно определять число оборотов. Говоря точнее, датчик частоты вращения обнаруживает не зубец как таковой, а в каждом случае переход от зубца к впадине между зубьями или наоборот.
Из DE 41 41 958 A1 и EP 0 800 087 A2 известны в частности датчики частоты вращения, которые имеют два элемента Холла. Для измерения частоты вращения датчик частоты вращения располагается, например, относительно зубчатого колеса таким образом, что зубец зубчатого колеса во время вращательного движения сначала проходит первый, а затем второй датчик Холла. Для этого два элемент Холла должны быть расположены со смещением, если смотреть в окружном направлении или направлении вращения зубчатого колеса или конструктивного элемента. При таких смещенных, если смотреть в направлении вращения зубчатого колеса, элементах Холла зубец сначала подходит к первому и после определенного угла поворота ко второму элементу Холла. Получающиеся из этого колебания магнитного поля обоих датчиков смещены друг относительно друга во времени, вследствие чего дополнительно может определяться не только скорость вращения и угловое ускорение, но и направление вращения, так как в зависимости от направления вращения колебание измеряет сначала один элемент Холла или сначала другой элемент Холла.
Однако теперь если подобный датчик вращения смонтирован таким образом, что остановившийся зубец находится одновременно напротив обоих элементов Холла, то есть оба элемента Холла имеют до боковой поверхности следующего зубца одинаковое расстояние, то общая напряженность магнитного поля на обоих элементах Холла имеет одинаковую величину в соответствующий момент измерения, и направление вращения не может больше определяться. Эта проблема может возникать, в частности, у датчиков частоты вращения, которые привинчиваются для монтажа. Если угловое положение датчика в привинченном состоянии таково, что оба элемента Холла имеют по существу одинаковое расстояние до боковой поверхности следующего зубца, то направление вращения не может определяться, или может доходить до погрешностей измерения, если разница расстояний слишком мала или неизвестна. Таким образом, при монтаже подобных датчиков необходимо постоянно следить за тем, что оба элемента Холла в конечном положении правильно ориентированы, так что при необходимости требуется отнимающая время дополнительная юстировка.
Для предотвращения этой проблемы в DE 41 41 958 A1 предлагается датчик частоты вращения, у которого оба элемента Холла и магнит расположены в датчике частоты вращения относительно подвижно. Например, предлагается то, что магнит вставляется в держатель, который может перемещаться внутри датчика частоты вращения относительно тела. И хотя тем самым могут корректироваться ошибочные ориентации, тем не менее, это требует много времени, чревато ошибками и требует обученный соответствующим образом квалифицированный персонал при монтаже.
Таким образом, задача изобретения состоит в предоставлении улучшенной системы, в частности, улучшенного датчика вращения для бесконтактного определения числа оборотов и направления вращения вращающегося во время эксплуатации конструктивного элемента, при помощи которой (системы), соответственно, которого (датчика вращения) могут предотвращаться недостатки обычных технологий. В частности, задача изобретения состоит в предоставлении датчика частоты вращения, при помощи которого могут определяться число оборотов и направление вращения вращающегося конструктивного элемента, и который можно быстро монтировать, и который не требует трудоемкой калибровки или юстировки.
Эти задачи решаются с помощью системы для бесконтактного определения числа оборотов и направления вращения вращающегося во время эксплуатации конструктивного элемента с признаками независимого пункта формулы изобретения. Предпочтительные варианты осуществления и применения изобретения проистекают из зависимых пунктов формулы изобретения.
Соответствующая изобретению система в соответствии с уровнем техники имеет вращающийся во время эксплуатации конструктивный элемент, причем конструктивный элемент, по меньшей мере, в одной окружной области имеет окружную структуру из выполненных в виде ребер или зубьев радиальных выступов и расположенных между ними пазов или впадин между зубьями. Окружная структура может быть частью поверхностной структуры вращающегося конструктивного элемента или может быть предусмотрена в виде отдельного датчика частоты вращения, который смонтирован на конструктивном элементе. Конструктивным элементом может быть, например намагничиваемый вал, то есть вал из ферромагнитного материала.
Кроме того, система включает в себя привинчиваемое сенсорное устройство, при помощи которого может определяться число оборотов и направление вращения конструктивного элемента. Сенсорное устройство имеет резьбовой участок, при помощи которого сенсорное устройство может привинчиваться для неподвижного расположения сенсорного устройства. Сенсорное устройство располагается таким образом, что окружная структура может перемещаться мимо сенсорного устройства. Кроме того, сенсорное устройство имеет устройство генерации магнитного поля и устройство регистрации магнитного поля. В дальнейшем сенсорное устройство называется также как датчик частоты вращения.
Согласно общим аспектам изобретения устройство регистрации магнитного поля имеет, по меньшей мере, три датчика магнитного поля, которые расположены не соосно на одной прямой линии и таким образом расположены со смещением. Другими словами датчики магнитного поля расположены с таким смещением, что в независимости от монтажного привинченного положения сенсорного устройства при вращении конструктивного элемента каждый выступ достигает, по меньшей мере, двух из указанных, по меньшей мере, трех датчиков магнитного поля с разницей (со смещением) во времени. Таким образом, если смотреть в окружном направлении выступов, соответственно, в направлении вращения конструктивного элемента всегда, по меньшей мере, два из упомянутых, по меньшей мере, трех датчиков магнитного поля расположены со смещением. При этом расстояние между максимально удаленными друг от друга датчиками магнитного поля меньше или равно ширине пазов или впадин между зубьями окружной структуры. Датчики магнитного поля расположены таким образом, что они взаимодействуют с устройством генерации магнитного поля и обращены к окружной структуре вращающегося конструктивного элемента.
Соответствующее изобретению наличие, по меньшей мере, трех датчиков магнитного поля предоставляет то особое преимущество, что независимо от монтажного положения датчика, то есть от поворотного положения в завинченном состоянии, всегда по меньшей мере, два датчика магнитного поля имеют различное расстояние до боковой поверхности ближайшего выступа, так что наряду с определением угловой скорости вращения также в любое время возможно определение направления вращения – в независимости от того, в каком поворотном положении смонтировано сенсорное устройство. По этой причине не требуется во время завинчивания сенсорного устройства следить за тем, как ориентированы датчики магнитного поля в конечном положении, так что изобретение создает условия для быстрого монтажа, и предотвращаются погрешности измерений, обусловленные монтажом. Кроме того, благодаря тому, что расстояние между максимально удаленными друг от друга датчиками магнитного поля меньше или равно ширине пазов или впадин между зубьями, обеспечивается то, что зарегистрированное различными датчиками изменение напряженности магнитного поля посредством вращающегося конструктивного элемента создается одной и той же боковой поверхностью зубца. Это делает возможным достоверное измерение угловой скорости вращения вала и направления вращения.
При этом один особенно предпочтительный пример осуществления предусматривает то, что устройство регистрации магнитного поля образовано из трех датчиков магнитного поля, которые расположены в виде треугольника. При этом длины сторон треугольника меньше или равны ширине пазов или впадин между зубьями. При этом наиболее предпочтительно расположение в виде равностороннего треугольника. Расположение в виде равностороннего треугольника создает условия для упрощенного анализа и математической обработки зарегистрированных сигналов магнитного поля. Кроме того, вследствие этого обеспечивается то, что в любом поворотном положении оба датчика магнитного поля, которые, если смотреть в направлении вращения, максимально удалены друг от друга, имеют определенное минимальное расстояние между собой, что предпочтительно для регистрации наиболее высоких частот.
Кроме того, согласно одному другому варианту осуществления предусмотрен оценочный блок для обработки (оценки) выходных сигналов упомянутых, по меньшей мере, трех датчиков магнитного поля, который настроен определять оба датчика магнитного поля, которые расположены на максимальном расстоянии друг от друга, если смотреть в направлении вращения конструктивного элемента, то есть в окружном направлении конструктивного элемента, соответственно, выступов, и для определения направления вращения использовать измеренные изменения потока этих двух датчиков магнитного поля.
Тем самым обеспечивается то, что в любом монтажном положении для измерения используются те два датчика магнитного поля, между которыми разница во времени созданного боковой поверхностью выступа изменения магнитного поля максимальна, что улучшает точность измерения. Предпочтительно оценочный блок выполнен в виде части внутренней электроники обработки результатов сенсорного устройства, однако он может быть также выполнен в виде внешнего оценочного блока.
Предпочтительно сенсорное устройство обладает функцией обучения, при помощи которой в сенсорном устройстве может сохраняться, какой из обоих использованных для определения направления вращения датчиков магнитного поля должен первым регистрировать изменение потока с более низкого потока на более высокий поток, чтобы имело место первое направление вращения и не противоположное направление вращения. Таким образом, на фазе обучения конструктивный элемент вращается в заданном первом направлении вращения, и делается заключение, какой из датчиков магнитного потока первым обнаруживает изменение потока с более низкого потока на более высокий поток. Если в штатном режиме этот датчик снова первым перед другим датчиком обнаруживает изменение потока с более низкого потока на более высокий поток, то имеет место это первое направление вращения, в противном случае это - противоположное направление вращения.
Согласно одному другому варианту осуществления упомянутые, по меньшей мере, три датчика магнитного поля расположены в плоскости, перпендикулярной к радиальному направлению конструктивного элемента, соответственно, окружной структуры, так что датчики имеют по существу одинаковое радиальное расстояние до вращающегося конструктивного элемента.
Дальнейшая возможность соответствующей изобретению реализации предусматривает то, что сенсорное устройство настроено обнаруживать вибрацию конструктивного элемента, если сигналы датчиков магнитного поля показывают угловую скорость вращения, отличную от нуля, но не показывают однозначное направление вращения. Согласно этому варианту могут обнаруживаться вибрации, что является частой проблемой, которая встречается у не вращающихся валов, в частности, передаточных валов, если механизм не вращается, а вибрации присутствуют. Подобные вибрации могут приводить к изменениям потока и тем самым к вычислениям угловой скорости вращения. Однако сенсорное устройство не определяет однозначное направление вращения, так как попеременно в равной степени обнаруживаются правые и соответственно левые вращения.
Датчиками магнитного поля сенсорного устройства могут быть активные датчики потока магнитного поля, которые предпочтительно работают согласно принципу Холла (датчики Холла).
Согласно одному другому аспекту изобретения сенсорное устройство может включать в себя корпус, который имеет торцевую область, в которой для образования измерительного наконечника закреплены датчики магнитного поля. Кроме того, корпус может иметь расположенное на противоположном конце тело корпуса, в котором расположены штекерное соединение для сенсорного устройства и микропроцессорный блок для обработки измерительных сигналов датчиков магнитного поля, в который выходные сигналы датчиков магнитного поля передаются для обработки. Кроме того, корпус может иметь резьбовой участок для привинчивания сенсорного устройства, который расположен предпочтительно между торцевой областью и телом корпуса.
Устройство генерации магнитного поля может быть выполнено в виде постоянного магнита или в виде нагружаемой напряжением катушки, которая создает магнитное поле. Предпочтительно устройство генерации магнитного поля включает в себя встроенную в корпус датчика катушку для создания магнитного поля. Катушка может быть встроена, например, в резьбовой участок.
Далее изобретение относится автомобилю, в частности, к автомобилю промышленного назначения, включающему в себя систему или сенсорное устройство, которые были здесь раскрыты.
Описанные ранее предпочтительные варианты осуществления и признаки изобретения могут произвольно комбинироваться друг с другом. Дальнейшие частные варианты и преимущества изобретения описываются в дальнейшем со ссылкой на приложенные чертежи, на которых показано:
фиг.1A - вид спереди на вал;
фиг.1B - вид сверху на вал с фиг. 1A;
фиг.2A - вид в перспективе известного из уровня техники датчика частоты вращения;
фиг.2B - схематичный вид сенсорного устройства согласно одному варианту осуществления изобретения; и
фиг.3 - схематичное изображение системы сенсорного устройства и вращающегося конструктивного элемента согласно одному варианту осуществления изобретения.
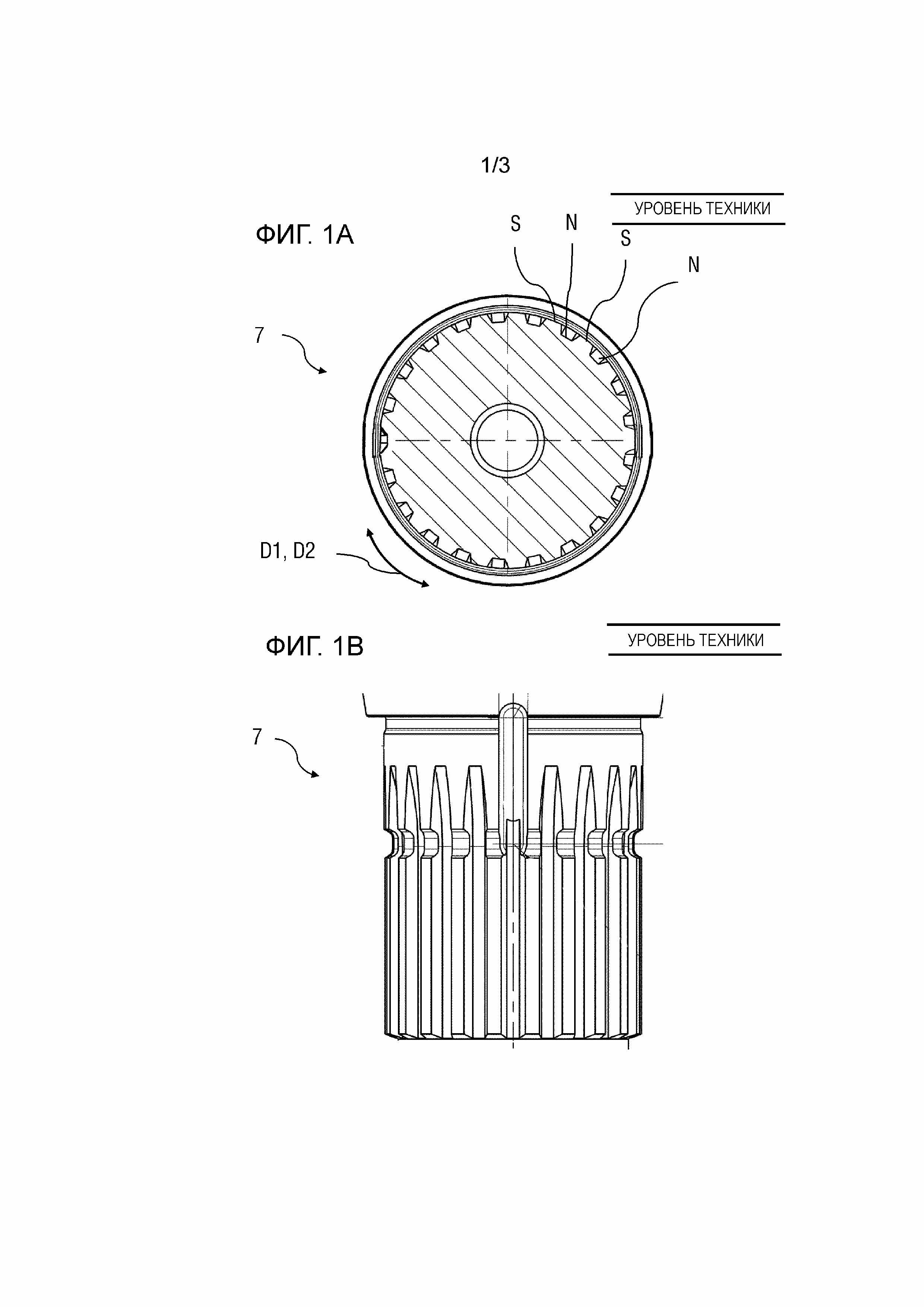
Фиг.1A и 1B показывают известный сам по себе вал 7 из ферромагнитного материала в качестве примера вращающегося во время эксплуатации конструктивного элемента, чьи угловая скорость вращения, ускорение и направление вращения должны измеряться при помощи сенсорного устройства. Вал имеет регулярную окружную структуру из пазов N и ребер S. Все ребра S имеют одинаковую ширину, и равным образом все пазы N имеют одинаковую ширину, причем ширина пазов и ширина ребер могут быть отличны друг от друга. При помощи обозначенной ссылочными позициями D1 и D2 двунаправленной стрелки обозначены оба возможных направления D1 и D2 вращения вала 7.
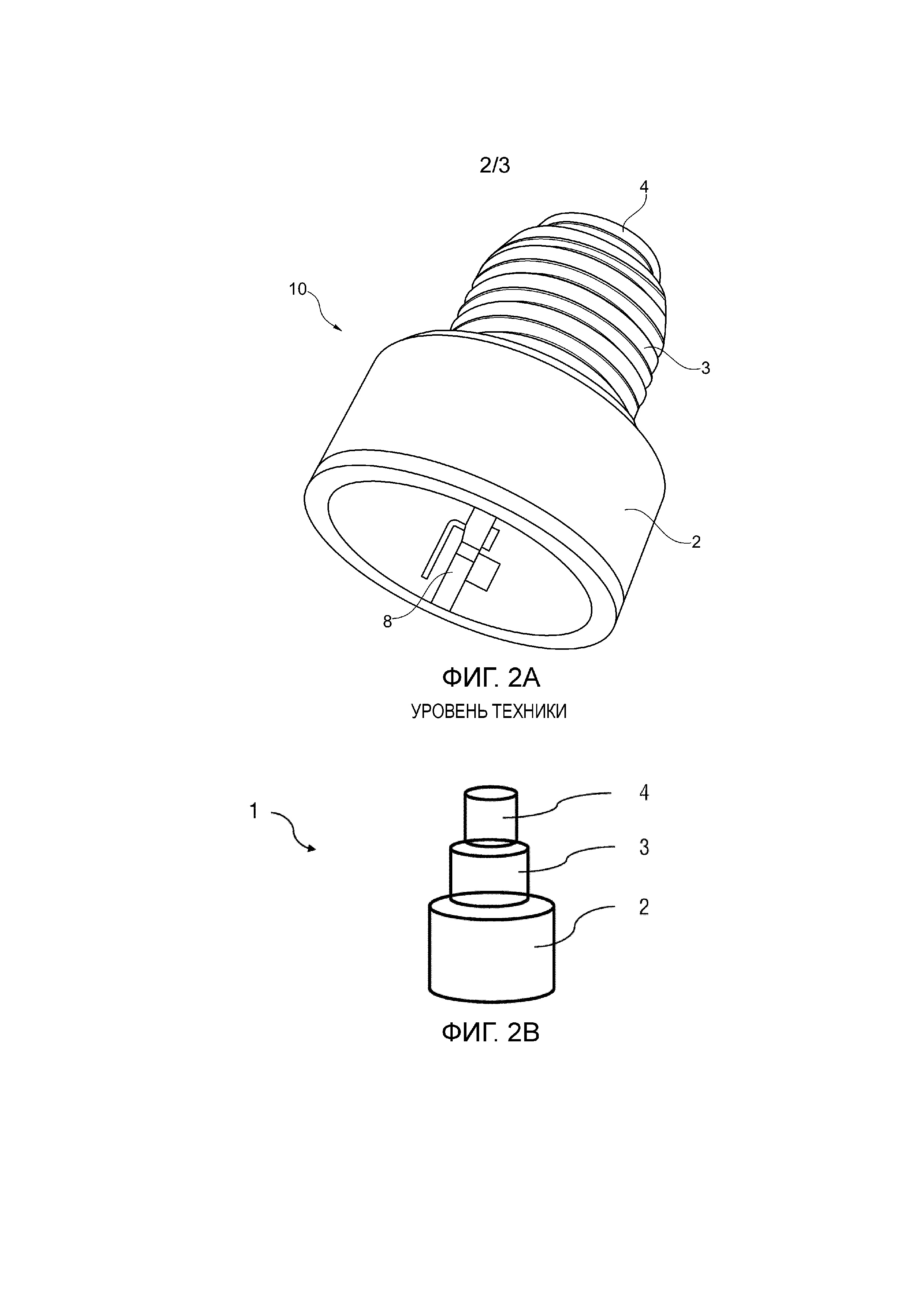
Фиг.2A схематично показывает на виде в перспективе конструкцию известного из уровня техники датчика 10 частоты вращения. Известный датчик частоты вращения выполнен в виде привинчиваемого датчика частоты вращения и имеет для этого суженный участок 3 с наружной резьбой. При помощи резьбового участка 3 датчик ввинчивается в соответствующее резьбовое отверстие, так что наконечник 4 датчика расположен в радиальном направлении против окружной структуры вала 7. В наконечнике 4 датчика, выполненном в виде суживающейся торцевой области, в известном из уровня техники датчике 10 частоты вращения расположен один или два датчика Холла. На противоположном конце датчик 10 частоты вращения имеет тело 2, в котором расположены штекерное соединение 8 и микропроцессорный блок. В микропроцессорный блок передаются выходные сигналы датчиков Холла.
Фиг.2B показывает вариант осуществления сенсорного устройства 1 на сильно схематизированном изображении. Сенсорное устройство 1 имеет аналогичный корпус, как у известного из уровня техники сенсорного устройства 10, включающий в себя торцевую область 4, резьбовой участок 3 и тело 2 корпуса, в котором расположены штекерное соединение и микропроцессорный блок. В отличие от известного из уровня техники датчика 10 в торцевой области 4 соответствующего изобретению датчика 1 расположены три активных датчика магнитного поля, что изображено на фиг.3. Катушка (не изображена на фиг.2B) для создания магнитного поля встроена в окружную боковую стенку корпуса.
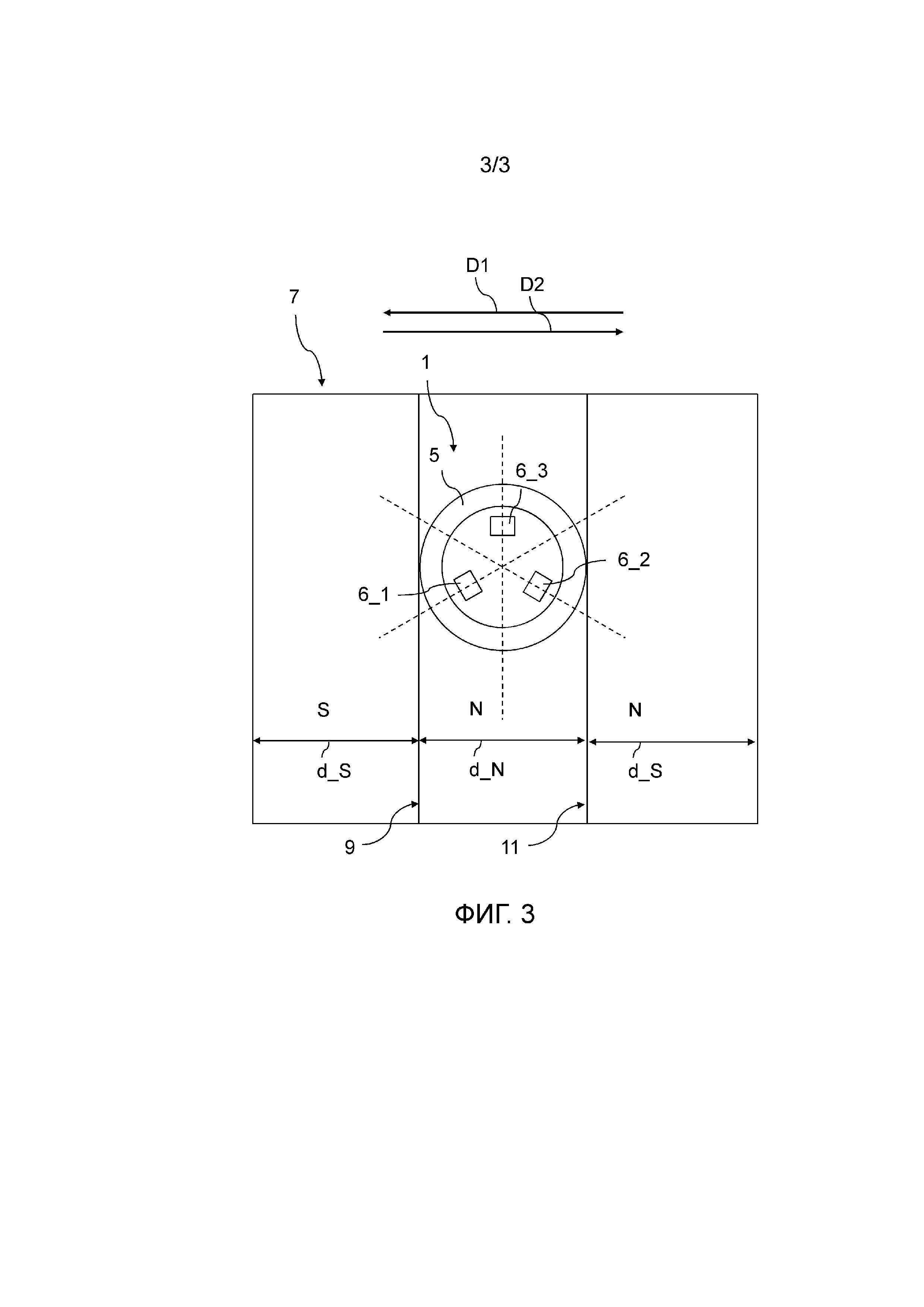
Фиг.3 показывает вид сверху на систему, состоящую из вала 7 и сенсорного устройства 1. Из всего вала 7 на фиг.3 показан лишь фрагмент соответственно одного паза N и двух соседних ребер S. Ширина ребер обозначена двунаправленной стрелкой d_S, а ширина паза двунаправленной стрелкой d_N. Оба направления вращения вала 7 вновь обозначены стрелками D1 и D2.
Из всего датчика 1 на фиг.3 для наглядного пояснения принципа конструкции схематично изображены лишь катушка 5 для создания магнитного поля и три активных датчика 6_1, 6_2 и 6_3 магнитного поля. Катушка 5 встроена в боковую стенку корпуса на резьбовом участке 3 и создает магнитное поле, с которым взаимодействуют три датчика 6_1, 6_2 и 6_3 магнитного поля. Три датчика магнитного поля выполнены в принципе конструктивно идентично и расположены в виде равностороннего треугольника, то есть точки расположения трех датчиков 6_1, 6_2 и 6_3 магнитного поля представляют собой вершины равностороннего треугольника. Для наглядности показаны пунктирные линии через датчик и центральную точку треугольника, причем пунктирные линии двух соседних датчиков магнитного поля в каждом случае образуют друг с другом угол в 60°. Характерным признаком является то, что вся головка датчика имеет меньший или равный диаметр, чем ширина d_N паза N. Три датчика 6_1, 6_2 и 6_3 магнитного поля в каждом случае соединены с микропроцессорным блоком, который находится в теле 2 корпуса.
Как можно увидеть на фиг.3, треугольное расположение трех датчиков 6_1, 6_2 и 6_3 магнитного поля обеспечивает то, что они расположены не на одной прямой линии, а расположены с таким смещением, что вне зависимости от монтажного привинченного положения сенсорного устройства при вращении конструктивного элемента каждый край ребра S достигает, по меньшей мере, двух из, по меньшей мере, трех датчиков магнитного поля с разницей во времени. Таким образом, если смотреть в окружном направлении ребер S или пазов N или в направлении D1, D2 вращения конструктивного элемента, по меньшей мере, два из трех датчиков 6_1, 6_2 и 6_3 магнитного поля постоянно расположены со смещением. Таким образом, в любом возможном привинченном положении сенсорного устройства 1 постоянно имеются, по меньшей мере, два датчика магнитного поля, которые имеют различное расстояние до боковой поверхности ближайшего ребра. В показанном на фиг.3 монтажном положении при вращении конструктивного элемента 7 в направлении D2 боковая поверхность, например, боковая поверхность 9 достигает сначала датчик 6_1, затем датчик 6_3 и, наконец, датчик 6_2. При вращении в противоположном направлении D1 последовательность обратная.
Даже в монтажном положении, при котором, например, датчики 6_2 и 6_3 имели бы одинаковое расстояние до боковой поверхности, например, до боковой поверхности 11 (это не изображено на фиг.3), расстояние от датчика 6_1 до боковой поверхности 11 было бы другим, чем расстояние от датчиков 6_2 и 6_3. Датчики 6_1, 6_2 и 6_3 магнитного поля измеряют изменения в магнитном потоке между пазами N и ребрами S. Для этого сенсорное устройство 1 выполнено, чтобы регистрировать время для изменения потока для каждого датчика по отдельности. Кроме того, может также регистрироваться время для изменения потока между датчиками.
При помощи данного исполнения датчика 1 предоставлены, например, несколько возможностей измерять угловую скорость вращения вала. Согласно первому варианту один из трех датчиков 6_1, 6_2 и 6_3 может считать чередование боковых поверхностей между пазами и ребрами. Если количество пазов и ребер известно, то может вычисляться угловая скорость вращения. Согласно другому варианту анализируется измерение времени между тремя датчиками. Вследствие этого угловая скорость вращения может определяться при помощи данных о геометрическом расположении датчиков.
Направление вращения конструктивного элемента 7 определяется, благодаря тому, что анализируется изменение потока между обоими расположенными, если смотреть в окружном направлении, на максимальном расстоянии друг от друга датчиками. В показанном на фиг.3 монтажном положении ими являются датчики 6_1 и 6_2.
Для этого еще на фазе обучения обучается направление вращения, причем вал 7 вращается в заданном направлении вращения, для того чтобы показать сенсорному устройству 1, что является прямым и обратным направлением. Например, датчик 6_1 обнаруживает изменение потока с более низкого потока на более высокий поток перед датчиком 6_3 при вращении в направлении D2, что по определению является в этом случае обученным направлением D2 вращения и сохранено в электронике обработки результатов. Затем если в режиме измерения датчик 6_1 обнаруживает перед датчиком 6_3 изменение потока с более низкого потока на более высокий поток, то определяется направление D2 вращения. В противном случае имеет место противоположное направление D1 вращения.
Несмотря на то, что изобретение было описано со ссылкой на определенные примеры осуществления, для специалиста очевидно, что различные изменения могут осуществляться, и эквиваленты могут использоваться в качестве замены, не выходя за объем изобретения. Дополнительно может реализовываться большое количество модификаций, не покидая соответствующий объем. Следовательно, изобретение не должно быть ограничено раскрытыми примерами осуществления, а должно охватывать все примеры осуществления, которые входят в объем приложенных пунктов формулы изобретения. В частности, изобретение истребует также защиты для предмета и признаков зависимых пунктов формулы изобретения вне зависимости от пунктов, на которые они ссылаются.
Реферат
Группа изобретений относится к системе для бесконтактного определения числа оборотов и направления вращения намагничиваемого вала. Система включает в себя вращающийся во время эксплуатации конструктивный элемент, который в одной окружной области имеет окружную структуру из выполненных в виде ребер или зубьев радиальных выступов и расположенных между ними пазов или впадин. Система включает в себя привинчиваемое сенсорное устройство для определения числа оборотов и направления вращения конструктивного элемента, имеющее резьбовой участок для неподвижного размещения сенсорного устройства, так что окружная структура может перемещаться мимо сенсорного устройства, устройство генерации магнитного поля и устройство регистрации магнитного поля. Устройство регистрации магнитного поля имеет, по меньшей мере, три датчика магнитного поля, которые расположены не на одной прямой линии, причем расстояние между максимально удаленными друг от друга датчиками магнитного поля меньше или равно ширине пазов или впадин между зубьями. Технический результат – повышение точности определения числа оборотов и направления вращения вала. 2 н. и 8 з.п. ф-лы, 3 ил.
Комментарии