Бесконтактный тахогенератор постоянного тока - SU1318173A3
Код документа: SU1318173A3
Чертежи

Описание
1. 1318173
зобретение относится к электрифо ны ум мо чу ны вьф вы ма
ческим машинам, а именно
оесконтактным тахогенераторам постоянного тока.
Цель изобретения - повышение точности определения измеряемой частоты вращения путем повышени-Я точности определения положения ротораg
фиг, 1 схематически изображены
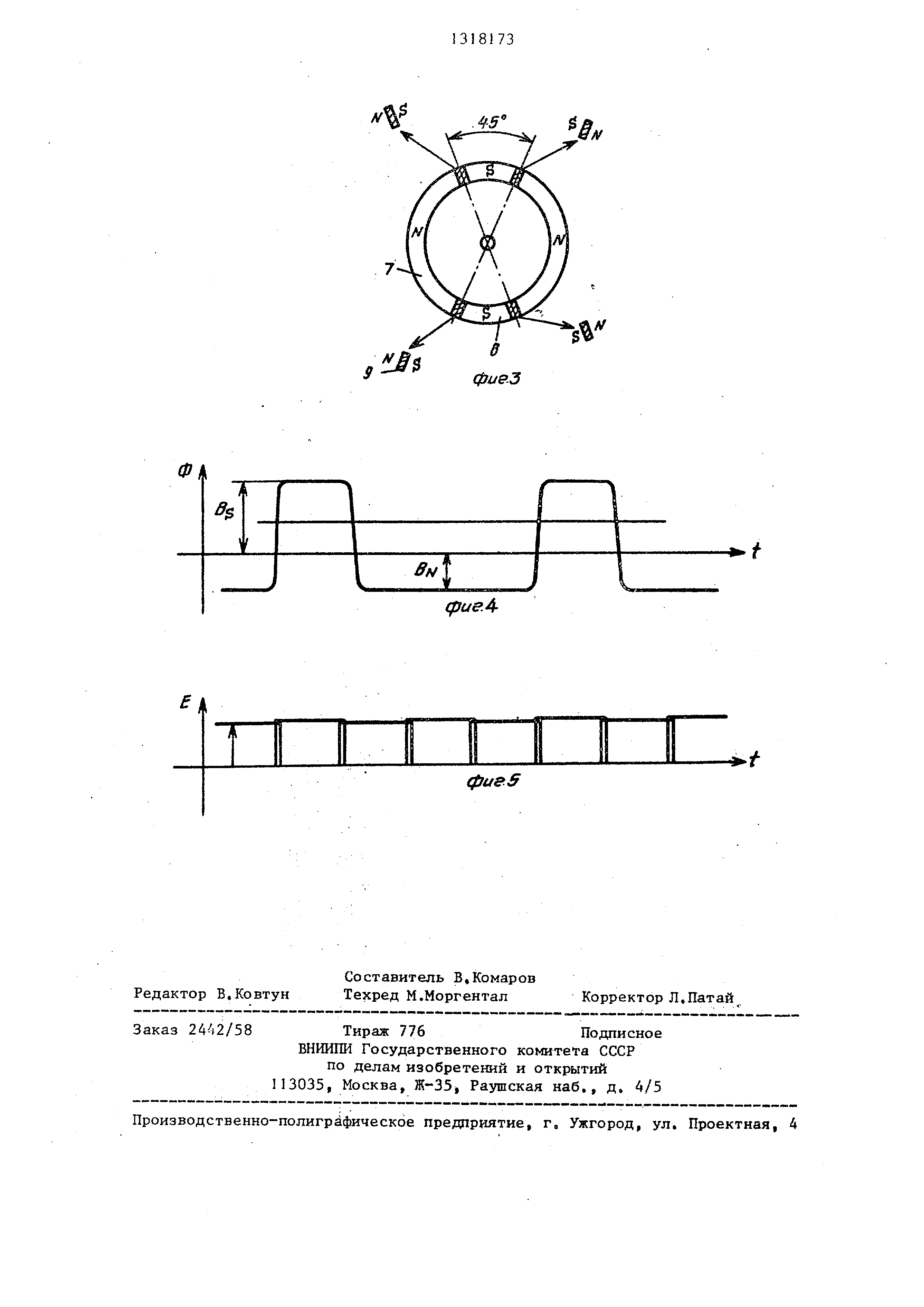
форма которой имеет вид, представленный на фиг. 4 и, следовательно уменьшается зона переключения фаз обмотки статора. При вращении-, ротора чувствительные элементы, расположенные в поле ротора датчика положения, вьфабатывают сигнал на включение и выключение фаз обмотки статора. Форма выходного напряжения тахогенера (элементы бесконтактного тахогенерато- тора (фиг.5) носит стабильный харакра постоянного тока; на фиго 2 -- ротор датчика положения; на фиг. 3 - полюсные наконечники ротора датчика положения тахогенератора с дополнительными постоянными магнитами; на фиг, 4 форма индукции, создаваемой ротором датчика положения; на фиг 5- форма выходного сигнала тахогенера- тора,
Тахогенератор содержит синхронный генератор со статором с обмоткой 2 и ротором 3 в виде постоянного магнита ,, Соосно с ротором 3 установлен датчик положения, содержащий ротор 4, выполненный в виде постоянного магнита 5, и чувствительные элементы 6, расположенные против ротора датчика положения(
Постоянный магнит ротора датчика положения снабжен полюснь ми наконечниками 7 и 8, между которыми установлены дополнительные постоянные магниты 9, примыкающие своими полюсами к полгосным наконечникам, установленным на одноименных полюсах ротора датчика положения. На фиг, 3 отдельно показаны дополнительные постоянз-ше магниты для пояснения их установки на роторе датчика положения„
За счет того, что отношение ширины полюсных наконечников шжкых полюсов к пшрине полюсных наконечников северных полюсов выбрано равным 1/3 и за счет установки дополнитель-ных постоянных магнитов увеличивается крутизна фронта магнитной индукции,
тер, величина сигнала с высокой степенью точности соответствует величине измеряемой частоты вращения,
5 Форму л а изобретения
Бесконтактный тахогёнератор постоянного тока, содержащий синхронный генератор с цилиндрическим ротором в виде постоянного магнита, статором с расположенной в нем обмоткой, и датчик положения ротора с ротором, установленным соосно с ротором генератора , и чувствительными элементами для обнаружения изменения магнитной индукции, расположенными против ротора датчика положения, о т л и 20
25
30
чающий ся тем, что, с целью )повьщения точности определения частоты вращения путем повыше1шя точности определения положения ротора, ротор датчика положения выполнен в ни - де постоянного магнита с полюсными наконечниками, отношение ширины по- 35 люсных наконечников, установленных на южных: полюсах к ширине полюсных наконечников, установленных на северных полюсах, равно 1/35 тахогёнератор снабжен дополнительными посто40
45
янными магнитами, расположенными между полюсными наконечниками соседних полюсов, причем полюса дополнительных постоянных магнитов примыкают к , полюсным наконечникам, установленным на одноименгагх с ними полк1сах ротора датчика положения,
форма которой имеет вид, представленный на фиг. 4 и, следовательно уменьшается зона переключения фаз обмотки статора. При вращении-, ротора чувствительные элементы, расположенные в поле ротора датчика положения, вьфабатывают сигнал на включение и выключение фаз обмотки статора. Форма выходного напряжения тахогенератора (фиг.5) носит стабильный характер , величина сигнала с высокой степенью точности соответствует величине измеряемой частоты вращения,
Форму л а изобретения
Бесконтактный тахогёнератор постоянного тока, содержащий синхронный генератор с цилиндрическим ротором в виде постоянного магнита, статором с расположенной в нем обмоткой, и датчик положения ротора с ротором, установленным соосно с ротором генератора , и чувствительными элементами для обнаружения изменения магнитной индукции, расположенными против ротора датчика положения, о т л и
30
чающий ся тем, что, с целью )повьщения точности определения частоты вращения путем повыше1шя точности определения положения ротора, ротор датчика положения выполнен в ни - де постоянного магнита с полюсными наконечниками, отношение ширины по- 35 люсных наконечников, установленных на южных: полюсах к ширине полюсных наконечников, установленных на северных полюсах, равно 1/35 тахогёнератор снабжен дополнительными посто40
45
янными магнитами, расположенными между полюсными наконечниками соседних полюсов, причем полюса дополнительных постоянных магнитов примыкают к , полюсным наконечникам, установленным на одноименгагх с ними полк1сах ротора датчика положения,
фие-З
Реферат
Изобретение относится к электрическим машинам, а именно к бесконтактным тахогенераторам постоянного тока. Цель изобретения - повышение точности определения измеряемой частоты вращения путем повышения точности определения положения ротора. Та- хогенератор содержит синхронный генератор со статором 1 с обмоткой 2 и ротором 3 в виде постоянного магнита, Соосно с ротором 3 установлен датчик положения, содержащий ротор 4, выполненный в виде постоянного магнита с полюсными наконечниками и чувствительные элементы 6, расположенные против ротора датчика положения. Отношение ширины полюсньк наконечников южных полюсов к ширине наконечников северных полюсов равно 1/3. Тахоге- нератор снабжен дополнительными постоянными магнитами, расположенными между полюсными наконечниками соседних полюсов. Полюса дополнительных постоянных магнитов примыкают к полюсным наконечникам, установленным на одноименных с ними полюсах ротора датчика положения, В тахогенераторе увеличивается крутизна фронта магнитной индукции и, следовательно, уменьшается зона переключения фаз обмотки статора, форма выходного напряжения носит стабильный характер. 5 ил. &э X ч М CN

Формула
Комментарии