Устройство и способ для рельсового транспортного средства - RU2524805C2
Код документа: RU2524805C2
Чертежи










Описание
Настоящее изобретение относится к устройствам и способам для измерительных и/или испытательных устройств для рельсовых транспортных средств.
Обычно рельсовые транспортные средства предоставляют многочисленные возможности прикрепления к ним измерительных или испытательных устройств. Почти все из этих возможностей требуют тщательно продуманной адаптации механизмов прикрепления с разными типами рельсовых транспортных средств. В дополнение, многие измерительные и испытательные устройства требуют как можно более беспрепятственного доступа к или в рельсовое транспортное средство и вдали от рельсового транспортного средства или вне его, например, для передачи данных по радио. Поэтому обычно измерительные и/или испытательные устройства прикрепляются в верхней наружной области рельсового транспортного средства, что, однако, связано с большими затруднениями, обусловленными очень отличающимися и меняющимися при необходимости надстройками на рельсовом транспортном средстве. Некоторые возможности прикрепления, например к шасси, входят в рассмотрение только с дополнительными испытаниями на безопасность, что делает эти механизмы прикрепления дорогостоящими и непривлекательными.
Цель изобретения состоит в том, чтобы предоставить устройства и способы для рельсовых транспортных средств, которые обеспечивают возможность универсального и простого присоединения к рельсовому транспортному средству с оптимальной процедурой прикрепленного устройства в действии.
Согласно аспекту изобретения, устройство выполнено из условия, чтобы оно могло быть присоединено к валу оси транспортного средства в рельсовом транспортном средстве. Преимущественно, присоединение может осуществляться наматыванием вокруг вала. Согласно изобретению, было признано, что компоновка на валу рельсового транспортного средства предоставляет конкретные преимущества. Среди прочего, вал рельсовых транспортных средств принадлежит к немногим компонентам рельсового транспортного средства, которые предоставляют возможность всего лишь небольших отклонений в своей конструкции. Типично, приблизительно только два диаметра используются во всем мире. Это предоставляет возможность размещения устройств, например, таких как датчики, блоки оценки и т.д., на рельсовых транспортных средствах особенно простым и легким образом. В частности, модернизация рельсовых транспортных средств таким устройством особенно упрощается компоновкой вала рельсового транспортного средства. Последующее испытание на безопасность может быть опущено. Для почти каждой из измерительных и испытательных процедур, которые должны осуществляться на рельсовом транспортном средстве, компоновка соответствующих датчиков и связанной электроники на одном или более валах рельсового транспортного средства предоставляет поразительные преимущества. Ниже это становится ясно на основании описания многочисленных аспектов изобретения.
Устройство может быть присоединено непосредственно к валу из условия, чтобы смещение по отношению к валу не происходило при работе рельсового транспортного средства. В частности, устройство должно присоединяться к валу из условия, чтобы оно увлекалось движением вращения вала при вращении вала.
Например, устройство может быть прикреплено к валу посредством одного (или более) бандажа, намотанного вокруг вала. Здесь, сторона устройства и/или бандажа прикрепления, обращенная к валу, может иметь выпуклости. Сторона, обращенная к валу, также может быть выполнена в форме профиля покрышки. Таким образом, получается как можно меньшая поверхность соприкосновения с валом. Профиль выпуклостей может быть выполнен, чтобы способствовать стоку жидкости с вала. Все это может уменьшать коррозию на валу, которая может представлять решающий аспект в этом типе прикрепления.
Преимущественно, устройство может быть присоединено к валу из условия, чтобы эффект надреза не возникал на валу. Устройство может присоединяться к валу из условия, чтобы лаковый слой, нанесенный на вал, не повреждался. В этом отношении действие силы, с которой устройство присоединено к валу, должно настраиваться из условия, чтобы она не становилась слишком большой. Устройство или средство прикрепления (например, бандаж) может иметь материал, который мягче, чем лаковый слой на валу. Устройство или средство прикрепления (например, бандаж) может иметь материал, который мягче, чем сталь вала.
Преимущественно, устройство может быть размещено на валу из условия, чтобы оно не располагалось в центре вала. Небольшое смещение в осевом направлении вала от центра вала или от центра рельсового транспортного средства может предоставлять преимущества, в частности, по механическим соображениям. В дополнение, линия визирования грузового контейнера или его днища может достигаться этим способом для различных конфигураций. При необходимости большее пространство для вращения устройства вокруг вала также может быть предусмотрено этим способом. Тем самым, также может быть облегчена сборка.
Согласно аспекту настоящего изобретения, устройство, в частности, может включать в себя электронику. Электроника может быть сконфигурирована для сбора данных транспортного средства, либо данных или информации, имеющих отношение к транспортному средству. Хотя компоновка на валу рельсового транспортного средства, в действительности, кажется проблематичной для сбора многочисленных данных, становятся очевидны некоторые конкретные полезные возможности применения.
Изобретение также предусматривает устройство и способ определения местоположения или позиционирования рельсового транспортного средства. Таким образом, устройство преимущественно может быть выполнено с возможностью выполнения способа радиолокации. Способ радиолокации может быть основан на использовании стационарных опорных радиостанций (точек беспроводного доступа). В этом отношении устройство на валу рельсового транспортного средства может быть выполнено с возможностью работы в пределах области действия беспроводной радиосети.
Согласно дополнительному аспекту изобретения, устройство может быть выполнено с возможностью выполнения способа радиолокации на основании способа спутниковой навигации. В частности, способ радиолокации может быть основан на спутниковой навигационной системе Galileo. Способ радиолокации также может использовать глобальную систему определения местоположения (GPS). Для этого приемник GPS, в частности, может быть расположен на валу рельсового транспортного средства.
При размещении приемника GPS на валу рельсового транспортного средства, в частности, должны приниматься во внимание отражения рельсовым транспортным средством и экранирования. Поэтому, может быть полезным смещать устройство в осевом направлении в сторону к кромке рельсового транспортного средства на валу.
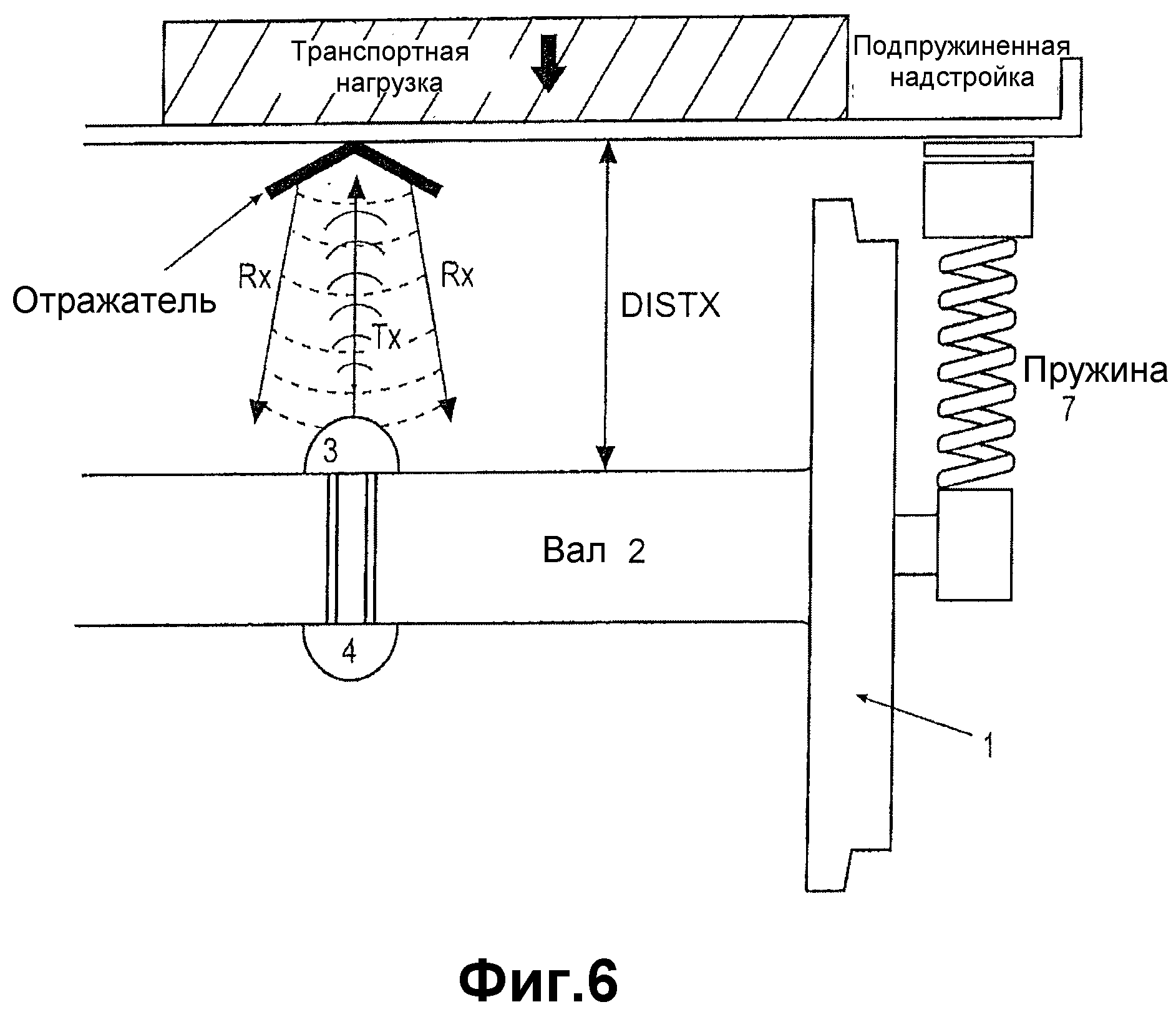
Изобретение также предусматривает устройство и способ определения состояния нагрузки рельсового транспортного средства. В преимущественной конфигурации устройство может иметь электронику, пригодную для выполнения измерения расстояния между валом и днищем рельсового транспортного средства. Оно затем может использоваться для определения состояния нагрузки рельсового транспортного средства. Измерение расстояния между валом и днищем рельсового транспортного средства может осуществляться посредством беспроводного способа, в частности, с применением радиосигналов. В частности, импульсные радиосигналы могут применяться для измерения расстояния между валом и днищем рельсового транспортного средства. Преимущественно, эти импульсные радиосигналы могут испускаться из устройства, расположенного на валу. При применении импульсных радиосигналов измерение расстояния между валом и днищем рельсового транспортного средства может осуществляться посредством измерения обратного рассеяния импульсных радиосигналов. Для этого соответствующая электроника детектирования может быть преимущественно расположена в устройстве на валу.
В другом варианте реализации ультразвуковой передатчик и ультразвуковой приемник могут быть предусмотрены в устройстве, посредством которых может измеряться время распространения звуковых волн между осью и известным объектом на днище вагона. Здесь, может быть полезным выполнять измерение, только если датчик ускорения, заключенный в устройстве, обнаружил, что ультразвуковые датчики расположены под некоторым углом поворота, преимущественно, в наивысшей точке вала.
Изобретение также предусматривает устройство и способ определения массы рельсового транспортного средства. Для этого, преимущественно, может оцениваться выходной сигнал датчика ускорения, который расположен на валу рельсового транспортного средства. Масса грузового вагона может определяться по тому, что он вибрирует некоторым образом, типичным для массы (частоты, амплитуды) после сотрясения (сотрясения маневрирования, прохождение по стрелке). Сотрясение может определяться по направлению и интенсивности датчиком ускорения на валу (оси), вибрация может определяться тем же самым датчиком ускорения или дополнительным датчиком на шасси. Из этих измерительных данных могут определяться масса вагона и масса груза при известном собственном весе, и тем самым может определяться состояние нагрузки. Вибрации, вырабатываемые сотрясением на валу, также могут определяться датчиком порождаемого конструкцией шума, размещенным в корпусе устройства. В этом отношении компоновка на оси должна также быть предпочтительной по отношению к компоновке на транспортном средстве либо на ступице или колесах.
Изобретение также предусматривает способ статистического получения состояния перемещения «тормоз нажат» в связи с уменьшением скорости для определения износа тормозов. Здесь, оценивается по меньшей мере один сигнал датчика, прикрепленного к валу или нескольким валам рельсового транспортного средства. Затем ускорение или скорость рельсового транспортного средства выводится из сигнала датчика. Затем оно сравнивается с состоянием тормоза (нажат или нет), и оттуда оно выводится, откуда берет начало изменение скорости. Из этого также может быть получен износ тормозов. Оценка сконфигурирована соответственно для определения износа тормозов на основании сигналов датчиков (например, датчика ускорения) и состояния приведения в действие тормоза. Оценка может происходить в устройстве на валу рельсового транспортного средства. Эта оценка также может быть только частичной оценкой, которая, например, обнаруживается только в коде ошибки, например, если тормоз приведен в действие, хотя поезд по-прежнему ускоряется или не замедляет свой ход соответствующим образом. Компоновка на валу рельсового транспортного средства особенно полезна для этих измерений.
В дополнительной полезной конфигурации устройство, в частности, может быть выполнено с возможностью выявления торможения рельсового транспортного средства. Для этого устройство преимущественно может включать в себя датчик порождаемого конструкцией шума с присоединением к валу (оси). Частота и длительность операций торможения является ключевым показателем износа и, тем самым, требования к техническому обслуживанию транспортного средства. Посредством постоянного жесткого присоединения колесных дисков к оси хорошая звукопередача выполняется между ними. Акустическая связь датчика, расположенного на обращенной к валу стороне устройства с валом, осуществляется через промежуточную деталь, предоставляющую возможность хорошей передачи порождаемого конструкцией шума, но не повреждает лаковый слой на валу. Нажатие тормозов вызывает значительное изменение порождаемого конструкцией шума благодаря высокому трению в колесных дисках, которое может измеряться датчиком. Полезно использование частоты измерений между несколькими герцами и 2000 Гц. Электроника оценки может выполнять соответствующую калибровку двух состояний «тормоз отпущен» и «тормоз нажат» с использованием дополнительного сигнала скорости. Здесь, статистически получается звуковой профиль ускорения транспортного средства с отпущенным тормозом и используется для сравнения. Дополнительным усовершенствованием статистического получения износа тормозов является регистрация энергии торможения, которая может быть определена датчиком ускорения на валу. Интенсивность торможения может определяться посредством уменьшения скорости (или замедления), определенного таким образом во время состояния перемещения «тормоз нажат», и может сохраняться для более поздней оценки износа. Компоновка на валу рельсового транспортного средства особенно полезна, так как влияние побочных шумов и затухание в этом месте низки.
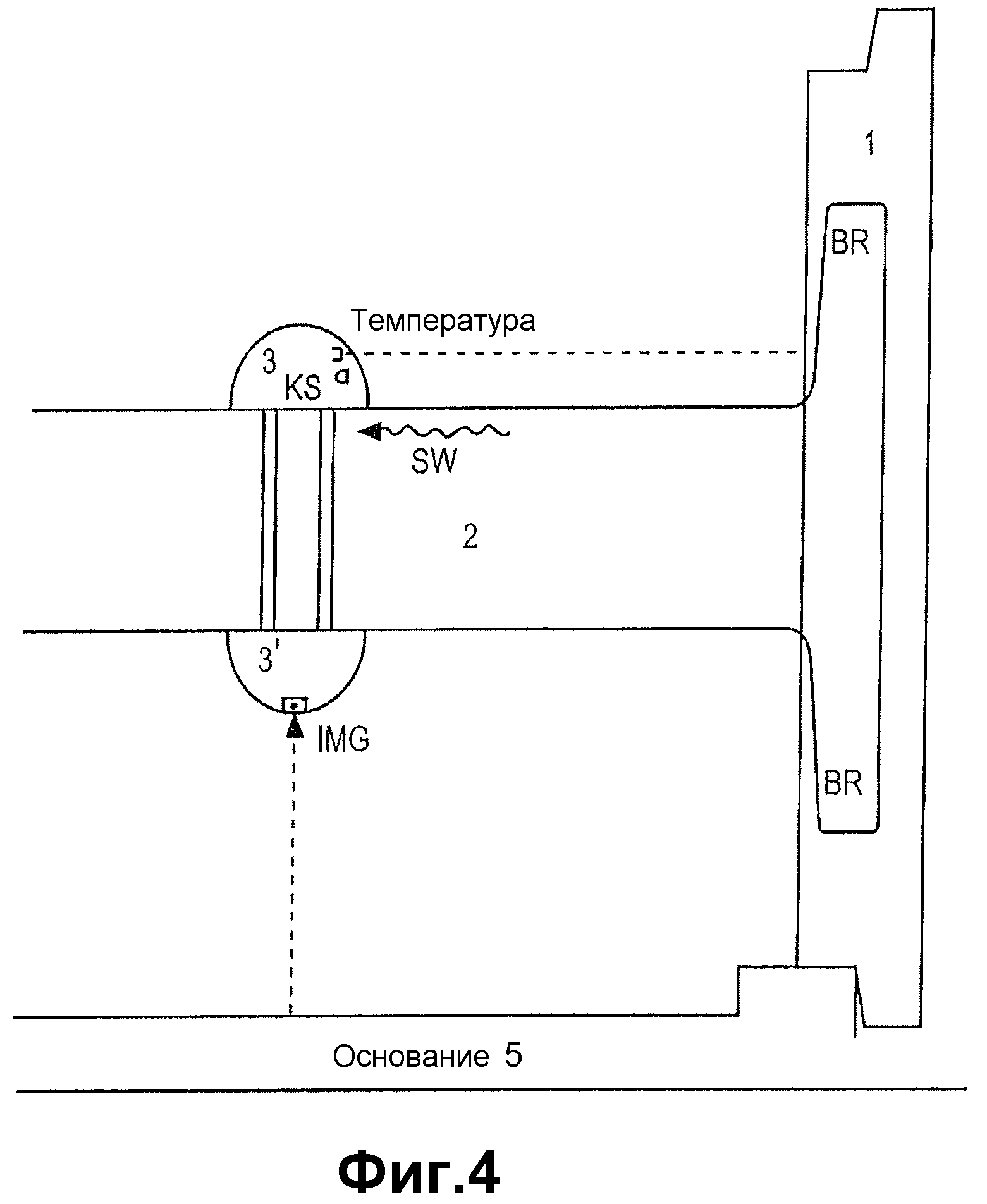
Устройство, к тому же, преимущественно может включать в себя датчик температуры. Этот датчик температуры обычно может применяться для детектирования температуры окружающей среды. Преимущественно, измерение температуры также может использоваться для определения перегрева буксовых подшипников рельсового транспортного средства. В частности, температура может определяться посредством инфракрасного датчика. Соответствующий инфракрасный датчик, в таком случае, преимущественно также может быть расположен в устройстве на валу. Компоновка (двух) датчика(ов) температуры, в частности инфракрасного датчика, в пределах устройства с линией визирования к внутренней стороне колеса преимущественно может использоваться для детектирования так называемых горячих букс, поскольку подшипник находится как раз на другой стороне колеса. Здесь, также, компоновка на валу оказывается особенно полезной.
В дополнительно полезной конфигурации устройство, преимущественно расположенное на валу рельсового транспортного средства, дополнительно может быть выполнено с возможностью выполнения определения положения рельсового транспортного средства согласно способу фильтрации местоположения. Способ фильтрации местоположения может быть основан на сравнении предварительно подвергнутых географической привязке записанных локальных профилей измеренных параметров и/или характеристик, выявляемых устройством. В частности, он может быть основан на подвергнутых географической привязке получении и сохранении значений ускорения (сотрясений железнодорожным путем и прохождений по стрелкам, изменений направления на стрелках, изменений направления изгибами дороги, вертикальных изменений направления на участках подъема и спуска, периодически повторяющегося пути, ускорения, профилей ускорения, например, замедления при прохождении через железнодорожные станции, периодически повторяющихся времен простоя), а также электромагнитных волн. Для этого устройство преимущественно может иметь радиоприемники и соответствующие антенны, которыми могут приниматься электромагнитные волны разных частотных диапазонов. Профили значений ускорения и электромагнитных волн, выявленные таким образом, могут быть связаны с определенными участками пути. Посредством сравнения с прежними подвергнутыми географической привязке записями, этим способом, локализация или определение положения рельсового транспортного средства также могут выполняться без спутниковой навигации. Устройство может быть выполнено с возможностью приема электромагнитных волн в частотном диапазоне ниже 100 МГц и определения локальных профилей по ним. Устройство может быть выполнено с возможностью приема электромагнитных волн в частотном диапазоне ниже 1 МГц и определения локальных профилей по ним. Устройство может быть выполнено с возможностью приема электромагнитных волн в частотном диапазоне выше 100 МГц и ниже 900 МГц и определения локальных профилей по ним. Устройство может быть выполнено с возможностью приема электромагнитных волн в частотном диапазоне выше 2,4 ГГц и определения локальных профилей по ним. Определение положения преимущественно может быть комбинацией способов и устройств спутниковой навигации, а также способов фильтрации местоположения.
Способ фильтрации местоположения также может быть основан на детектировании изгибов дороги. Для этого, в частности, входит в рассмотрение применение датчиков ускорения. Тогда датчик ускорения преимущественно может быть расположен в устройстве на валу. Способ фильтрации местоположения также может быть основан на детектировании значений ускорения. В частности, некоторые специфические профили или характеристики, вызванные прокатыванием колес по определенным участкам пути, могут оцениваться для выявления положения рельсового транспортного средства.
Способ фильтрации местоположения также может быть основан на акустических сигналах. В частности, устройство, в таком случае, также может иметь акустический датчик, например, такой как микрофон или датчик порождаемого конструкцией шума, или тому подобное, на валу на рельсовом транспортном средстве. Например, акустические сигналы в таком случае могут использоваться для выявления действия торможения рельсового транспортного средства. Более того, участки пути, стрелки, изгибы и т.д. могут оцениваться посредством значений ускорения и/или акустическим образом. Таким образом, устройство согласно изобретению может определять положение или относительное положение рельсового транспортного средства на участке пути или пересылать соответствующие данные, которые используются для определения положения или скорости, а также дополнительные рабочие параметры транспортного средства вне рельсового транспортного средства.
Согласно преимущественному аспекту изобретения, устройство также может быть выполнено с возможностью выполнения способа фильтрации местоположения на основании распознавания образов. Для этого устройство может иметь датчик изображения или яркости. Он может детектировать информацию точечного, линейного или плоского изображения, яркость или цвет, либо цветовые контрасты или перепады яркости. Эти детектирующие сигналы затем могут использоваться для определения положения рельсового транспортного средства.
Для определения положения фильтрами местоположения, преимущественно, небольшая часть парка грузовых вагонов может быть оборудована датчиками и точными приемниками спутниковой навигации (например, GPS, Galileo, EGNOS, AGPS, DGPS). Определенные измерительные данные привязываются к определенному положению и времени измерения и локально сохраняются для более поздней оценки, или передаются в базу данных по линии радиосвязи (например, GSM, спутниковую связь). Таким образом, строится «карта специфичных местоположению ускорений, радиоволн и т.д.». Оставшаяся большая часть парка грузовых вагонов, в таком случае, может быть оборудована всего лишь недорогими датчиками. Здесь точные дорогостоящие приемники спутниковой навигации не требуются. Посредством сравнения записанных измеренных данных с «картой», записанной в базе данных, определяется положение. Сравнение может выполняться в датчике или в системе баз данных. Для того чтобы быть способным выполнять сравнение в датчике, релевантные данные из базы данных передаются в датчик через линию радиосвязи (GSM, спутниковую связь, локальные радиосети). Однако способ «цифрового радиовещания» (например, DAB) особенно полезен для передачи этих данных, поскольку идентичные данные («карта») передаются на многие датчики из центра (базы данных) (отношение 1:n).
С помощью описанного ниже датчика пробега в милях, он может точно рассчитываться по положению, определенному на «карте» (в способе привязки). Стало очевидным, что при этом способе возможно местоположение с путевой точностью. Это, в частности, важно при операции маневрирования и при путевых строительных работах (синхронизации предупреждений бригад рабочих).
Достаточно небольшого количества парка грузовых вагонов, оборудованного спутниковой навигацией, чтобы гарантировать непрерывное автоматическое обновление «карты».
Согласно аспекту изобретения, предусмотрено устройство, которое выполнено с возможностью определения последовательности вагонов рельсового транспортного средства. В материалах настоящей заявки относительное положение вагона может определяться посредством движения вагона в некоторый момент времени. Для этого, преимущественно, датчик движения может быть прикреплен к рельсовому транспортному средству. Преимущественно, датчик движения может быть расположен на валу одного и/или более вагонов. Преимущественно, датчик движения расположен на каждом вагоне рельсового транспортного средства или поезда. Определение движения в таком случае осуществляется посредством датчика движения. В полезной конфигурации датчик движения может быть датчиком ускорения, расположенным на валу рельсового транспортного средства.
Согласно предшествующему уровню техники, специалист по вагонам должен вручную проверять, верны ли состав поезда и последовательность вагонов. Проверка является отнимающей много времени и неудобной. Согласно этому аспекту изобретения, вагоны поезда или рельсового транспортного средства оборудованы устройствами согласно аспекту изобретения. В частности, устройства расположены на валах рельсовых транспортных средств в соответствии с изобретением. В варианте осуществления, при отправлении каждое устройство на валу сохраняет время, когда оно отправилось. Вал отправляет измеренное время отправления и свое фактическое время суток на соседние валы или блоки телематики для сбора всех данных. Передача фактического времени суток служит для синхронизации часов из условия, чтобы приемник данных мог очень точно определять разницы во времени отправления валов. Вследствие высокой упругости буферов вагонов и обычных сегодня ловительных соединений поезда имеют значительную эластичность в продольном направлении. Сжатие поезда, в частности, происходит при маневрировании и торможении поезда локомотивом. В связи с этим при последующем растяжении поезда моменты времени начала движения каждого отдельного вагона задерживаются.
Согласно аспекту изобретения, предусмотрен способ определения последовательности вагонов рельсового транспортного средства (то есть рельсового транспортного средства с множеством вагонов, соответственно, поезда). В материалах настоящей заявки момент времени первого движения вагона рельсового транспортного средства оценивается моментом времени первого движения другого вагона рельсового транспортного средства для определения относительного положения двух вагонов. Преимущественно, движение является движением вагона вперед или назад. Оно может определяться по той причине, что прикреплен датчик движения, который определяет значение движения, которое фильтруется и оценивается для того, чтобы закрывать простые колебания или возмущения. Этот аспект изобретения основан на понимании, что вагоны рельсового транспортного средства двигаются в разные моменты времени при отправлении. Вследствие эластичности соединений вагонов рельсового транспортного средства временная задержка между отдельными вагонами возникает при отправлении. Поэтому, среди прочего, способ согласно изобретению основан на принципе определения движения и момента времени движения для использования его для определения последовательности вагонов. В материалах настоящей заявки компоновка датчиков на валах вагонов особенно отказоустойчива и выгодна.
В качестве альтернативы определению последовательности поезда по началу движения поезда, она также может осуществляться во время движения временным сравнением возникновения внешнего события (например, прохождения стрелки). Этот аспект изобретения основан на понимании, что каждый из вагонов поезда в движении будет проходить местоположение с особой характеристикой (например, выпуклостью) за конечное время. Прохождение стрелки регистрируется всеми вагонами и снабжается временной отметкой часов, синхронно идущих во всех устройствах. Для проверки достоверности, преимущественно, текущая скорость вагона может сохраняться при событии. Она должна быть приблизительно равной при каждом из событий вагонов в рассматриваемом поезде, поскольку все вагоны поезда движутся с одной и той же скоростью. Сравнение событий может осуществляться в любом устройстве в пределах поезда или в другом месте кроме поезда. Соответствующий блок оценки также может быть специально установлен в местоположении, которое специально инициирует формирование такого события (например, на стрелке).
Согласно аспекту изобретения, оценка, которая является сравнением моментов времени, может осуществляться в устройстве на валу рельсового транспортного средства.
Дополнительная оценка интенсивностей радиосигнала между валами дополнительно предоставляет возможность проверки достоверности: тем самым, вагоны, отправленные одновременно на одной и той же железнодорожной станции по другим путям, могут отфильтровываться из списка вагонов поезда.
Согласно еще одному аспекту изобретения, оценка также может происходить в блоке оценки вне рельсового транспортного средства.
Преимущественно, оценка также может происходить в портативном устройстве вне рельсового транспортного средства, которое эксплуатируется человеком, который посажен для контроля очередности вагонов. Ручное устройство в таком случае сконфигурировано для приема и сравнения моментов времени начала движения каждого вагона. В другой конфигурации это осуществляется в одном из устройств на валу вагона.
Согласно дополнительному аспекту, оценка моментов времени первого движения вагонов также может осуществляться в пределах вагона рельсового транспортного средства, в частности локомотива или тяговой машины. Для этого моменты времени первого движения могут передаваться с датчика на валу на следующий датчик на следующем валу следующего вагона. В частности, в материалах настоящей заявки, эпизодическая сеть может создаваться между датчиками на валах вагонов рельсового транспортного средства. Здесь, каждое из устройств на валах вагонов рельсового транспортного средства может передавать данные на следующее устройство на валу, которое, в свою очередь, пересылает данные до тех пор, пока, в заключение, не достигнут вагон или место в поезде, в котором может осуществляться оценка. Поэтому, в этом отношении компоновка устройства на валу также является особенно полезной.
Преимущественно, движение может быть движением качения колес рельсового транспортного средства. Поэтому, в полезных конфигурациях, в устройстве, прикрепленном к валу рельсового транспортного средства, в частности, могут быть предусмотрены датчики, которые пригодны для определения вращения колес. Если вал оси транспортного средства, к которой прикреплено устройство с соответствующим датчиком, вращается в соответствии с вращением колес, движение вращения вала может использоваться для детектирования вращения колес и, тем самым, соответствующего движения вагона или рельсового транспортного средства. В частности, таймер или часы реального времени, в таком случае, могли бы быть предусмотрены в устройстве, которые указывают момент времени начала движения. Начало движения, в таком случае, могло бы снабжаться абсолютной (из часов реального времени) или относительной (из общего тактируемого таймера) временной отметкой. В еще одном варианте осуществления момент времени также может быть получен из беспроводной сети посредством основанной на времени системы определения местоположения (GPS) или внешней привязки по времени (таймера или часов реального времени) в блоке оценки вне устройства на валу. В таком случае устройство на валу рельсового транспортного средства только сигнализировало или передавало бы начало движения. Преимущественно, ID (идентификационный номер) вала и/или вагона, в таком случае, может быть привязан к данным. ID вала, например, может выдаваться в постоянной памяти (ПЗУ (постоянном запоминающем устройстве (ROM), электрически стираемом программируемом ПЗУ (EEPROM)) в устройстве на валу. ID в таком случае может быть уникальным номером, который может встречаться только один раз. Связывание ID с валом в таком случае может осуществляться один раз и конкретно для полного срока службы вала. Связывание ID вагона преимущественно может осуществляться при оборудовании вагона колесным агрегатом и его валом у производителя или после замены на обслуживающем предприятии. Затем, ID может использоваться в качестве индикатора для начала движения вагона. Это уместно, если последовательно отправляются многочисленные вагоны. В таком случае за короткий период времени могут последовательно возникать многочисленные сообщения, что было начато движение. Установление различий согласно валам и/или вагонам, начавшим движение, в таком случае может осуществляться в пределах одного или более блоков оценки на одном или более валов либо в буксировочном транспортном средстве (локомотиве), или, иначе, за пределами поезда в портативном устройстве.
Детектирование движения преимущественно может осуществляться по той причине, что сигнал, сообщенный датчиком движения, сравнивается с пороговым значением. Только если сигнал движения имеет определенную непрерывность выше порогового значения, сигнализируется или определяется начало отправления. Это может быть полезным для исключения кратковременных сотрясений и возмущений.
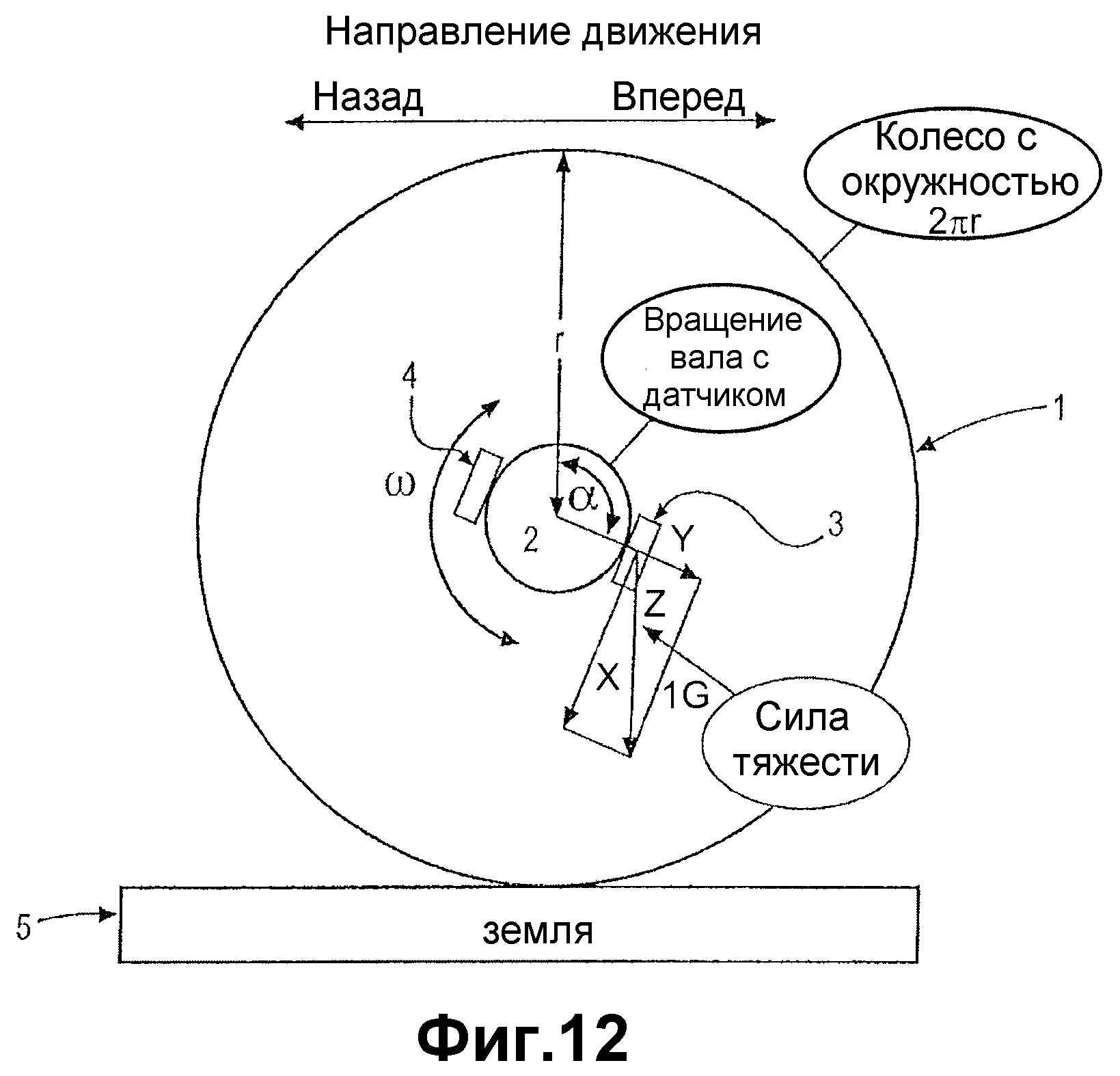
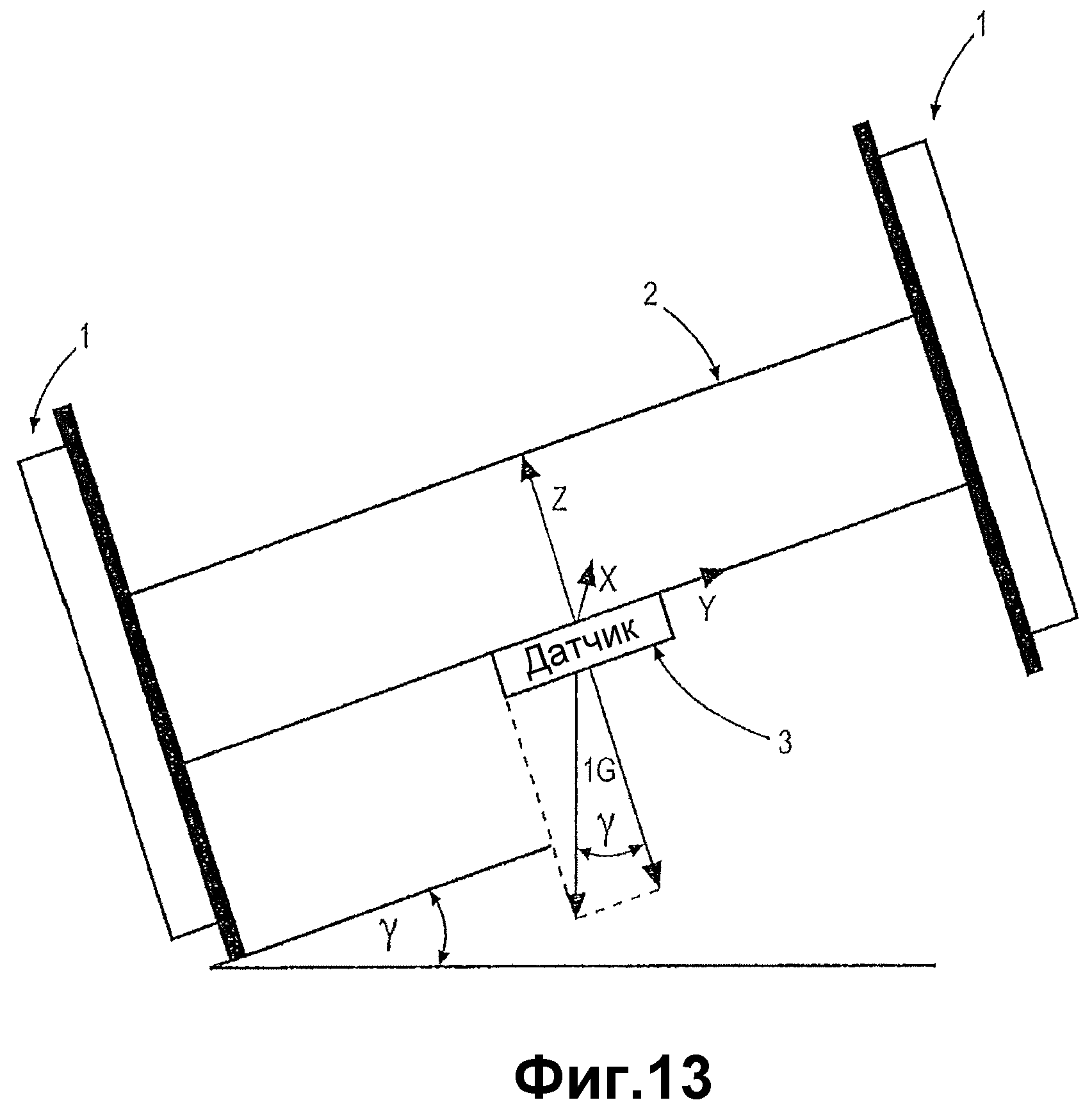
Согласно аспекту изобретения, устройство может иметь датчик ускорения. Датчик ускорения может быть пригодным для определения статического ускорения вдоль по меньшей мере первой оси (то есть в направлении вдоль оси, например, декартовой системы координат). Датчик ускорения может быть размещен на вращающейся детали рельсового транспортного средства, которая вращается в ответ на движение перемещения транспортного средства, из условия, чтобы датчик ускорения двигался при движении вращения колес транспортного средства (пропорционально скорости перемещения) из условия, чтобы соотношение ускорения свободного падения, измеренного датчиком ускорения, изменялось вследствие углового отклонения первой оси по отношению к полю тяготения земли. Таким образом, датчик ускорения может быть расположен в поле тяготения земли и испытывать движение вращения, в силу чего положение оси, на которой он определяет статическое ускорение (например, ускорение свободного падения), может изменяться. Датчик ускорения может выдавать сигнал, представляющий измеренное ускорение.
Дополнительные аспекты датчика ускорения описаны ниже. Они преимущественно могут комбинироваться с определением последовательности вагонов. Подобным образом, каждый из других аспектов изобретения, подобных определению местоположения, формированию сети, определению действия тормозов, измерению температуры и т.д., может комбинироваться с этими и другими аспектами изобретения полезным образом. В частности, к аспектам изобретения применяется, что они выигрывают от компоновки устройства на валу рельсового транспортного средства.
Изобретение также предусматривает способ определения последовательности вагонов рельсового транспортного средства. Рельсовое транспортное средство, в таком случае, может включать в себя множество вагонов. Здесь, например, моменты времени возникновения одинакового внешнего механического воздействия на вагоны могут сравниваться друг с другом. Для этого, преимущественно, оцениваются сигналы с датчиков, прикрепленных к валам вагонов. Датчики могут быть датчиками ускорения.
Изобретение также предусматривает способ для регулярной проверки комплектности поезда рельсового транспортного средства, включающего в себя множество вагонов. В этом отношении, соответственно, фактически определенная последовательность поезда может сравниваться с последовательностью поезда, служащей в качестве эталона. Определение фактической последовательности поезда осуществляется посредством оценки сигналов с датчиков, прикрепленных к одному или более валам вагонов.
Ранее описанное устройство, определяющее последовательность поезда по внешним событиям, преимущественно также может использоваться для проверки комплектности поезда в любых местоположениях вдоль перегона. Для этого требуется только сравнение между последовательностью поезда, определенной в начале перемещения и сохраненной в устройстве оценки, и фактически определенной последовательностью поезда. Оценка может осуществляться в электронике оценки, расположенной на поезде, или стационарным оборудованием, которое, например, прикреплено около пути. Также может быть полезным, чтобы все из данных, определенных в устройстве оценки, пересылались в центр через глобальную линию радиосвязи (например, GSM), и там осуществлялась центральная оценка касательно комплектности поезда. Последнее также предоставляет возможность немедленного инициирования дополнительных действий, если комплектность поезда уже не имеет места.
Вышеописанные способы определения последовательности поезда преимущественно могут быть сконфигурированы для формирования списка вагонов поезда. Здесь, оценка сигналов с датчиков на валах или валу вагона или всех вагонов поезда преимущественно может быть сконфигурирована из условия, чтобы определялся состав поезда или так называемая последовательность вагонов. Это известно как компоновка поезда. Особенно полезно, что точной синхронизации часов в отдельных устройствах не требуется для этого.
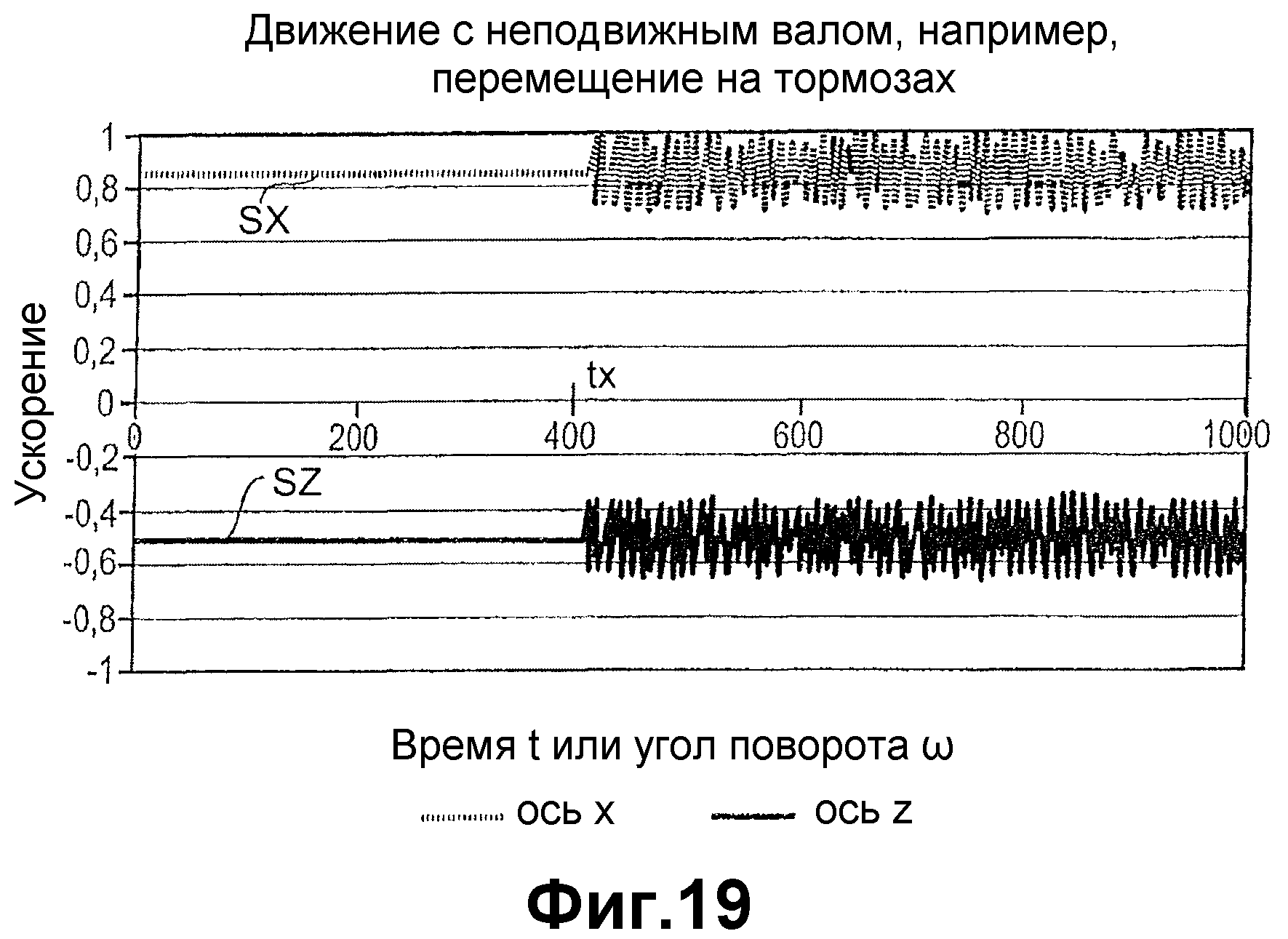
При испытании тормозов, перед отправлением поезда, каждый из тормозов поезда сначала приводится в действие, а затем вновь отпускается машинистом поезда, централизованно управляющим уменьшением и увеличением давления воздуха в магистральной воздушной линии. Проверка, реагировал ли тормоз отдельного вагона, фактически осуществляется подходящим элементом датчика давления в контуре давления тормозной системы или датчиком траектории в тормозном механизме, который регистрирует и оценивает изменения. Если тормоза всех вагонов реагировали успешно, испытание тормозов считается пройденным. По существу, в описанном способе существует проблема определения отличия торможения «обычной» работы от испытания тормозов. Для этого, согласно этому аспекту изобретения, преимущественно, датчики движения могут быть предусмотрены в устройстве на валу рельсового транспортного средства, выходные сигналы которых могут оцениваться для определения отличия между движущимся рельсовым транспортным средством и стоящим рельсовым транспортным средством. Поскольку отпущенный тормоз сначала нажимается только при выполнении испытаний тормозов, а затем вновь отпускается в неподвижном состоянии без изменения поездом своей скорости в течение этого времени, устройство согласно аспекту изобретения также может быть преимущественно сконфигурировано и использоваться для испытания тормозов.
Согласно аспекту изобретения, также предусмотрена беспроводная сеть, компоненты (узлы сети) которой определены с использованием устройства на валах рельсовых транспортных средств. В частности, сетевые узлы могут быть расположены на валах вагонов поезда. Предпочтительно, сеть может иметь характеристики беспроводной эпизодической сети. В этом отношении, может быть предусмотрено, что устройства на валах рельсового транспортного средства самопроизвольно определяют себя узлами сети связанной сети. В еще одной конфигурации часть электроники (некоторые датчики и т.д.) может быть расположена на валу рельсового транспортного средства, а другая часть электроники может быть размещена централизованно в блоке телематики в другом местоположении рельсового транспортного средства. Тем самым, не установлено никаких ограничений на состав поездов.
Согласно полезной конфигурации, передача данных в таком случае может происходить по сети из устройства на рельсовом транспортном средстве (например, на валу) в соответствующее устройство на соседнем рельсовом транспортном средстве (например, другом вагоне того же самого поезда, в частности, в устройство на валу того же самого или другого вагона поезда). В силу этого могут перекрываться большие расстояния между грузовыми вагонами или также пассажирскими вагонами. Отдельное устройство в таком случае всего лишь должно быть способным осуществлять передачу на следующий вагон (или также вал). Тем самым, энергия может значительно сберегаться. В пределах устройства могут быть предусмотрены процедуры аутентификации и авторизации. В частности, может выполняться ассоциативное связывание с рельсовым транспортным средством. Устройства могут программироваться относительно своей ассоциативной связи с рельсовым транспортным средством при вводе в эксплуатацию. В силу этого избегаются ошибочные построения сетей из устройств на рельсовых транспортных средствах. В таком случае сеть может быть сконфигурирована для определения последовательности вагонов поезда. В этой связи сеть может быть сконфигурирована согласно каждому из дополнительных аспектов настоящего изобретения, как они описаны выше и ниже.
Настоящее изобретение также относится к способу модернизации рельсового транспортного средства устройством, прикрепленным к валу рельсового транспортного средства. Прикрепление преимущественно может быть осуществлено посредством бандажа, намотанного вокруг вала. Поэтому настоящее изобретение имеет цель предложить устройство и способ контроля рельсовых транспортных средств, в частности грузовых вагонов, которые пригодны для применения на рельсовых транспортных средствах и, среди прочего, предоставляют возможность простой модернизации рельсовых транспортных средств устройством.
Согласно дополнительному аспекту настоящего изобретения, предусмотрено устройство для контроля рельсового транспортного средства с колесами. Согласно этому аспекту изобретения, устройство может включать в себя датчик ускорения. Датчик ускорения может быть пригодным для определения статического ускорения вдоль по меньшей мере первой оси (то есть в направлении вдоль оси, например, декартовой системы координат). Датчик ускорения может быть расположен на вращающейся детали рельсового транспортного средства, которая вращается в ответ на движение перемещения транспортного средства, из условия, чтобы датчик ускорения двигался при движении вращения колес транспортного средства (пропорционально скорости перемещения) так, чтобы соотношение ускорения свободного падения, измеренного датчиком ускорения, изменялось вследствие углового отклонения первой оси по отношению к полю тяготения земли. Таким образом, датчик ускорения может быть расположен в поле тяготения земли и испытывать движение вращения, в силу чего положение оси, на которой он определяет статическое ускорение (например, ускорение свободного падения), может изменяться. Датчик ускорения может выдавать сигнал, представляющий измеренное ускорение. Устройство может включать в себя блок оценки, который установлен для приема выходного сигнала датчика ускорения, который указывает измеренное ускорение, и для определения пробега в милях и/или скорости перемещения рельсового транспортного средства на основании этого выходного сигнала. Блок оценки может быть установлен для определения по меньшей мере пробега в милях или скорости перемещения по развитию значений ускорения во времени. Блок оценки дополнительно может быть установлен для детектирования по меньшей мере одного сигнала отклонения от номинала по сигналу датчика ускорения. Как пояснено позже, преимущественно, множество датчиков ускорения может быть расположено на валу рельсового транспортного средства под постоянным углом друг к другу.
Вращающаяся деталь могла бы быть самим одним колесом или более из колес рельсового транспортного средства. Однако, преимущественно, вращающаяся деталь всего лишь присоединена к колесам и двигается в соответствии с движением вращения колес, которое отражается в изменении выходного сигнала датчика ускорения, который соответствует движению транспортного средства. По сигналу датчика (изменению статического ускорения), например, пробег в милях транспортного средства может рассчитываться, если известны окружность колеса и соотношение между оборотами колеса и оборотами датчика ускорения. Окружность или диаметр колеса, поэтому, преимущественно хранятся в блоке оценки. Более того, блок оценки может быть установлен для определения мгновенной скорости или ускорения рельсового транспортного средства по сигналу датчика.
Согласно преимущественному аспекту изобретения, датчик ускорения, например, расположен в или на валу оси транспортного средства, присоединенной к колесам, из условия, чтобы датчик ускорения двигался вокруг центральной точки вала при движении вращения колеса (например, с такой же частотой вращения, как колеса на валу) при нормальном перемещении транспортного средства вперед или назад. Выходной сигнал датчика ускорения, исходящий из него, подается в блок оценки, который приспособлен для определения пробега в милях рельсового транспортного средства на основании выходного сигнала. При непрерывном движении рельсового транспортного средства в одном направлении датчик ускорения будет двигаться вокруг вала оси транспортного средства рельсового транспортного средства, а угол оси, на котором датчик ускорения измеряет статическое ускорение, меняется по отношению к (или в) полю тяготения земли (относительно силовых линий поля тяготения земли). Это всегда верно, если датчик ускорения, как таковой, вращается в поле тяготения земли или вполне обычно в статическом поле тяготения планеты, поскольку ось, на которой датчик ускорения может определять ускорение, испытывает угловое отклонение относительно поля тяготения из условия, чтобы в результате происходило изменение измеренного ускорения. Одновременно, эти аспекты изобретения также предоставляют возможность определять значения непреднамеренного ускорения тем же самым датчиком ускорения и связывать их с определенной группой ошибок.
Согласно дополнительному аспекту изобретения, блок оценки выполнен с возможностью определения пробега в милях полного транспортного средства или, например, оси грузового вагона, состоящего из вала и колес (таким образом, не непосредственно у рельсового транспортного средства, а у отдельной оси транспортного средства). Это имеет огромное значение, особенно если оси транспортного средства в рельсовом транспортном средстве заменяются. Тем самым, отдельная ось транспортного средства может иметь иной пробег в милях, чем другая ось транспортного средства одного и того же рельсового транспортного средства. В контексте настоящего изобретения «вал» обозначает вал оси транспортного средства, который соединяет два колеса. Согласно этому аспекту изобретения, блок оценки прикреплен к оси транспортного средства вместе с датчиком ускорения, например, в изготовленном за одно целое (в одном корпусе) компактном устройстве.
Блок оценки определяет пробег в милях оси транспортного средства, к которой прикреплен датчик (или устройство). В дополнение, блок оценки может быть установлен для определения пробега в милях рельсового транспортного средства, соответственно, пройденного расстояния рельсового транспортного средства, по приращению (относительному увеличению) пробега в милях одной из нескольких или нескольких осей транспортного средства. Несмотря на то что оценка сигналов ускорения, относящихся к оси транспортного средства, может происходить прямо в блоке оценки на оси транспортного средства, уже предварительно оцененные сигналы нескольких осей транспортного средства могут иметь отношение и сопоставляться с дополнительными параметрами и сигналами, соответственно, в центральном блоке (позже описанном более подробно в качестве блока телематики) рельсового транспортного средства.
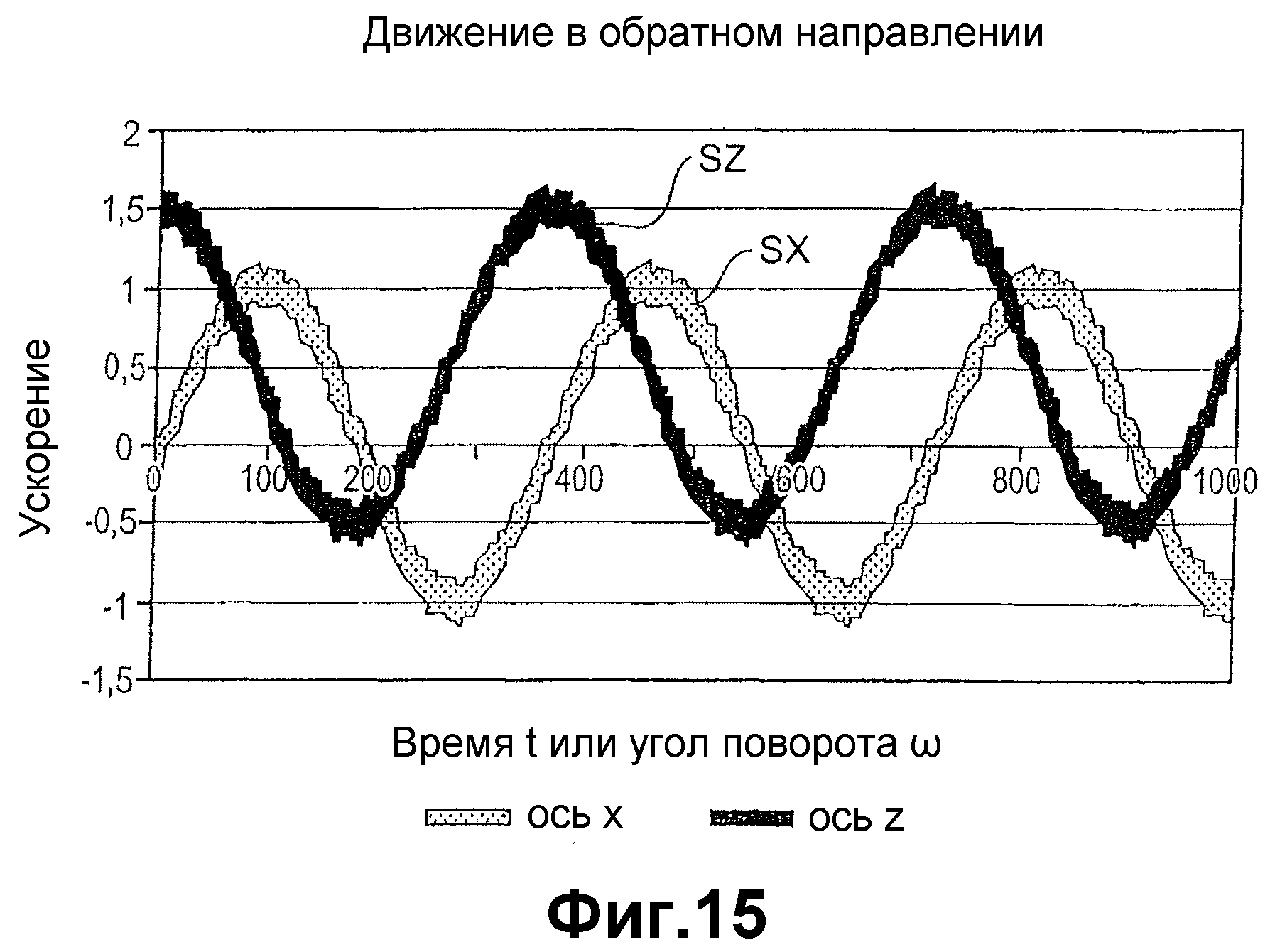
Согласно изобретению, среди прочего, было обнаружено, что по выходному сигналу датчика ускорения, в котором отражено ускорение, измеренное датчиком ускорения, пробег в милях и/или скорость перемещения преимущественно могут определяться посредством электронной оценки, и, одновременно, могут определяться наиболее важные сигналы ошибок. При непрерывном движении вперед или назад транспортного средства выходной сигнал является периодическим сигналом, в идеальном случае - синусоидальным сигналом. С известной окружностью колеса блок оценки преимущественно может определять пройденное расстояние рельсового транспортного средства, например, по периоду или частоте синусоидального сигнала (или, иначе, по расстоянию точек максимума или нуля синусоидального сигнала).
Преимущественно, определение пробега в милях или скорости перемещения возможно по максимумам/минимумам (экстремумам) выходного сигнала датчика ускорения. Это происходит потому, что в соответствии с положением оси или осей, на которых датчик ускорения измеряет статическое ускорение, может возникать смещение (измеренного значения ускорения), которое сдвигает выходной сигнал (измеренное ускорение) относительно нулевой линии. Поэтому, нулевые точки часто менее пригодны, чем максимумы или минимумы выходного сигнала. Автоматическая оценка выходного сигнала датчика ускорения, например, в микроконтроллере, также преимущественно может быть настроена для определения пробега в милях на основании максимумов или минимумов выходного сигнала и для выдачи соответствующего выходного значения, представляющего пробег в милях.
Преимущественно, датчик ускорения может быть размещен из условия, чтобы по меньшей мере одна ось, на которой ускорение может определять статическое ускорение, была ориентирована так, что угловое отклонение оси по отношению к полю тяготения не происходит в результате при блокировке колес. Тогда это преимущественно может быть учтено в конфигурации блока оценки. Он может быть выполнен из условия, чтобы он определял блокировку колес рельсового транспортного средства на основании этого выходного сигнала (или, иначе, множества таких выходных сигналов) датчика ускорения. Здесь, например, могут обнаруживаться неправильное действие или неправильные срабатывания тормозов рельсовых транспортных средств, которые влекут за собой повреждения и износ. Часто, тормоза вообще не отпускаются или не отпускаются надлежащим образом при маневрировании, или сила торможения не регулируется надлежащим образом по отношению к состоянию нагрузки. Устройство согласно изобретению может быть настроено для обнаружения этих ошибок. В частности, блок оценки может включать в себя часы реального времени и выдавать возникновение (начало) блокировки колес с временной отметкой, и при необходимости определять длительность неустойчивого режима работы.
Преимущественно, датчик ускорения может быть расположен на внешней окружности вала, присоединенного к колесу (например, оси, соединяющей два колеса рельсового транспортного средства). В основном, датчик ускорения также преимущественно может быть расположен на колесе либо в или на ступице. Однако, согласно изобретению, компоновка на валу оси транспортного средства была осуществлена в качестве особенно полезной по вышеупомянутым причинам. В этом отношении датчик или сборка, в которой размещен датчик, может вращаться как одно целое по существу вокруг вала и, в этом отношении, вокруг собственной оси. При компоновке на колесе или ступице могут быть достигнуты преимущества согласно изобретению.
Преимущественно, датчик ускорения может быть расположен из условия, чтобы первая ось, на которой датчик ускорения может определять статическое ускорение, указывала в тангенциальном направлении на внешней окружности площади поперечного сечения вращающейся детали, к которой он прикреплен (например, вала оси транспортного средства). Датчики ускорения типично имеют одно, два или три осевых направления, ортогональных друг другу (также упоминаемых как оси или измерения), на которых они могут определять ускорения. Для каждого из этих осевых направлений (осей, измерений) выходной сигнал может выдаваться датчиком ускорения. Поскольку датчики также могут определять статическое ускорение (например, ускорение свободного падения) в каждом из этих направлений, выходной сигнал датчика ускорения типично выдает информацию об изменении значения ускорения в одном, двух или всех трех направлениях. Если одна из осей датчика ускорения указывает в тангенциальном направлении, соответственно, направлении вращения вала оси транспортного средства, таким образом, синусоидальный выходной сигнал является результатом при постоянной скорости вращения. Кроме того, выходной сигнал также выдает информацию об угле поворота или положении колеса при медленных движениях или даже при остановке.
Выгодное расстояние от датчика движения до центра вала оси транспортного средства, например, имеет значение около 100 мм. Преимущественно, датчик ускорения, в таком случае, может двигаться по круговой траектории с диаметром 200 мм при вращении вала. Типичным диаметром D вращающейся детали (например, вала оси транспортного средства), на которой размещен датчик ускорения, может быть D=173 или 160 мм. Могло бы быть выяснено, что приблизительно на это расстояние возбуждается сигнал в типичных датчиках движения, характеристики которых содействуют оценке по отношению к пробегу в милях, движению вращения и определенным ошибочным условиям. Чем ближе датчик расположен к центру (связанному с поперечным сечением) вала или вращающейся детали, тем в меньшей степени сигнал возможно подвергается наложению значений возмущения относительно некоторых сигналов оценки. Однако центр обычно затруднен для или вовсе не имеет доступа. Компоновка на ступице колеса также может быть полезной, поскольку она доступна, но вряд ли пригодна для модернизации.
Преимущественно, датчик ускорения также может быть расположен из условия, чтобы второе осевое направление, в котором датчик ускорения определяет ускорение, указывало от центра вала в радиальном направлении относительно площади поперечного сечении вала (или вращающейся детали). Если датчик с двумя осевыми направлениями используется и расположен согласно этому аспекту изобретения, таким образом, может определяться ускорение в радиальном, а также в тангенциальном направлении. Отсюда, может преимущественно определяться направление вращения колеса, так как выходные сигналы, связанные с соответственной осью, находятся в определенной фазировке друг к другу в зависимости от того, в каком направлении вращаются колесо или колеса транспортного средства. В таком случае блок оценки согласно этому аспекту настоящего изобретения преимущественно сконфигурирован из условия, чтобы он определял фазировку выходных сигналов и выводил информацию о направлении вращения колеса из нее.
В заключение, датчик ускорения преимущественно может быть расположен из условия, чтобы третье осевое направление, в котором датчик ускорения может определять ускорение, указывало поперек направления перемещения, например, в осевом направлении вала. Таким образом, например, также может определяться наклон транспортного средства, либо вала или оси транспортного средства. Тем самым, например, движение на повороте или специфические внешние состояния отклонения от номинала также могут автоматически идентифицироваться и, например, сохраняться и/или передаваться со временем их возникновения (временной отметкой).
Таким образом, датчик ускорения может быть выполнен в качестве 1-мернго, 2-мерного или 3-мерного датчика, в котором осевые направления, в которых определяется ускорение, в парах являются, каждое, ортогонально друг другу. Множество 1-, 2- или 3-мерных датчиков также может использоваться в разных местоположениях окружности оси, которые облегчают оценку, например, поскольку может избегаться смещение, являющееся результатом центробежной силы, в качестве значения возмущения.
Устройство согласно настоящему изобретению преимущественно может иметь датчик ускорения, аналого-цифровой преобразователь, батарею для энергоснабжения, микропроцессор для предварительной оценки или, иначе, для всесторонней оценки (согласно вышеупомянутым аспектам) выходных сигналов датчика и память для хранения информации выходного сигнала датчика ускорения. В дополнение, может быть предусмотрен модуль радиосвязи для передачи по меньшей мере предварительно обработанных (например, оцифрованных и проверенных по профилю ошибок) или сохраненных данных. Датчик(и) ускорения, память, модуль радиосвязи и/или микропроцессор, а также дополнительные компоненты преимущественно могут быть размещены в общем надежном корпусе. Этот корпус (устройство) преимущественно прикрепляется к оси (валу) транспортного средства. Для избежания дисбаланса, идеально, должен быть предусмотрен противовес, например, на противоположной стороне вала оси транспортного средства.
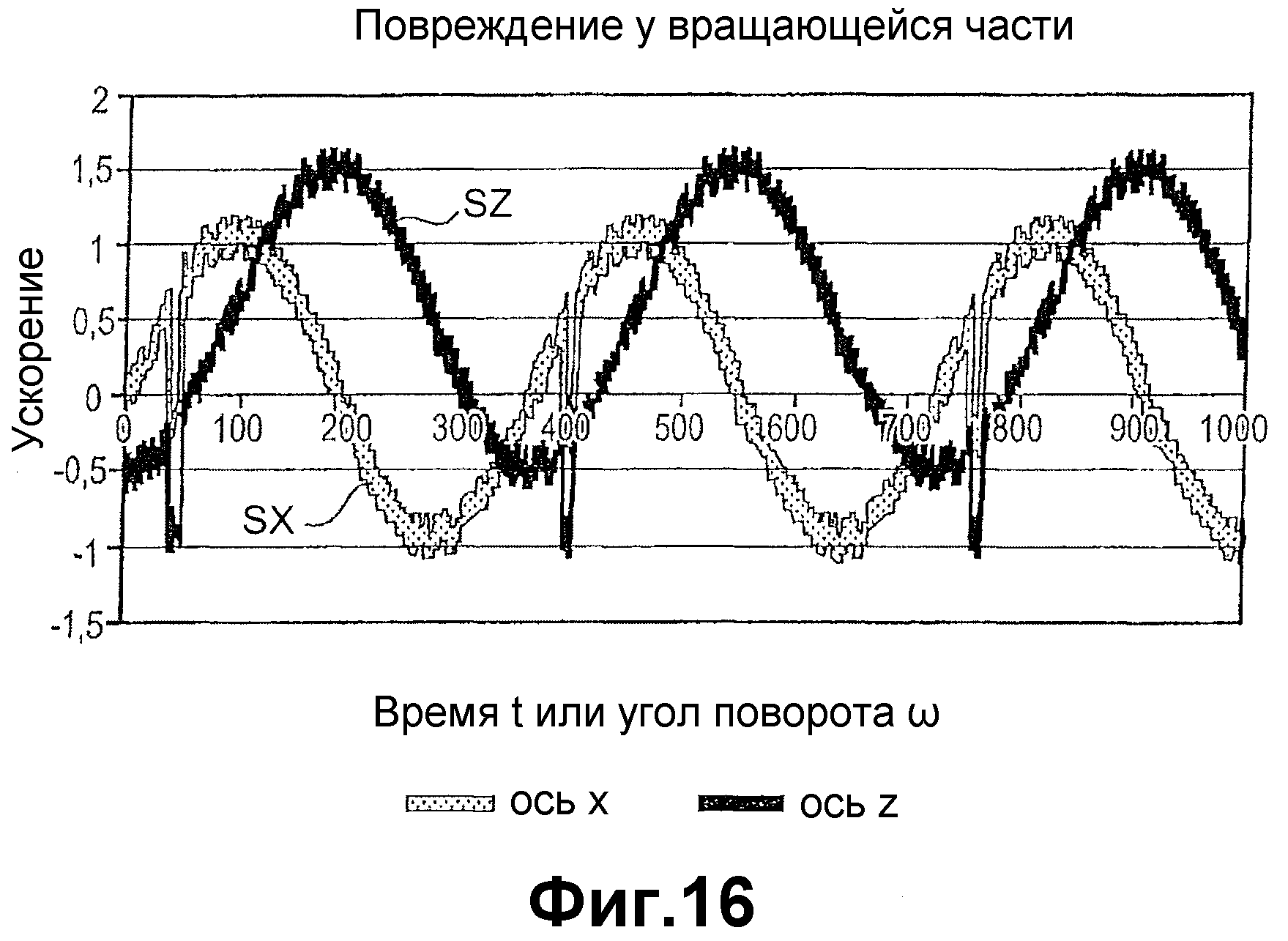
Прежде всего, оценка может быть настроена, чтобы предусматривать определение пробега в милях, соответственно, показания в километрах или пройденных километров, либо пройденного расстояния транспортного средства. Кроме определения пробега в милях либо угла наклона колес или оси транспортного средства, она также может определять повреждения в отношении вращающегося объекта (например, подшипников или беговой поверхности в конкретных плоскостях) на основании выявления отклонений от синусоидальной траектории. Если отклонения от синусоидальной формы периодически повторяются с частотой оси при одном и том же угловом положении, это указывает неисправность, например, на колесах или в подшипнике. Блок оценки, в таком случае, может быть настроен, чтобы автоматически идентифицировать и различать этот тип ошибок (определенных профилей ошибок). Сохранение и/или передача в таком случае может осуществляться в виде кода ошибки, возможно, с временной отметкой.
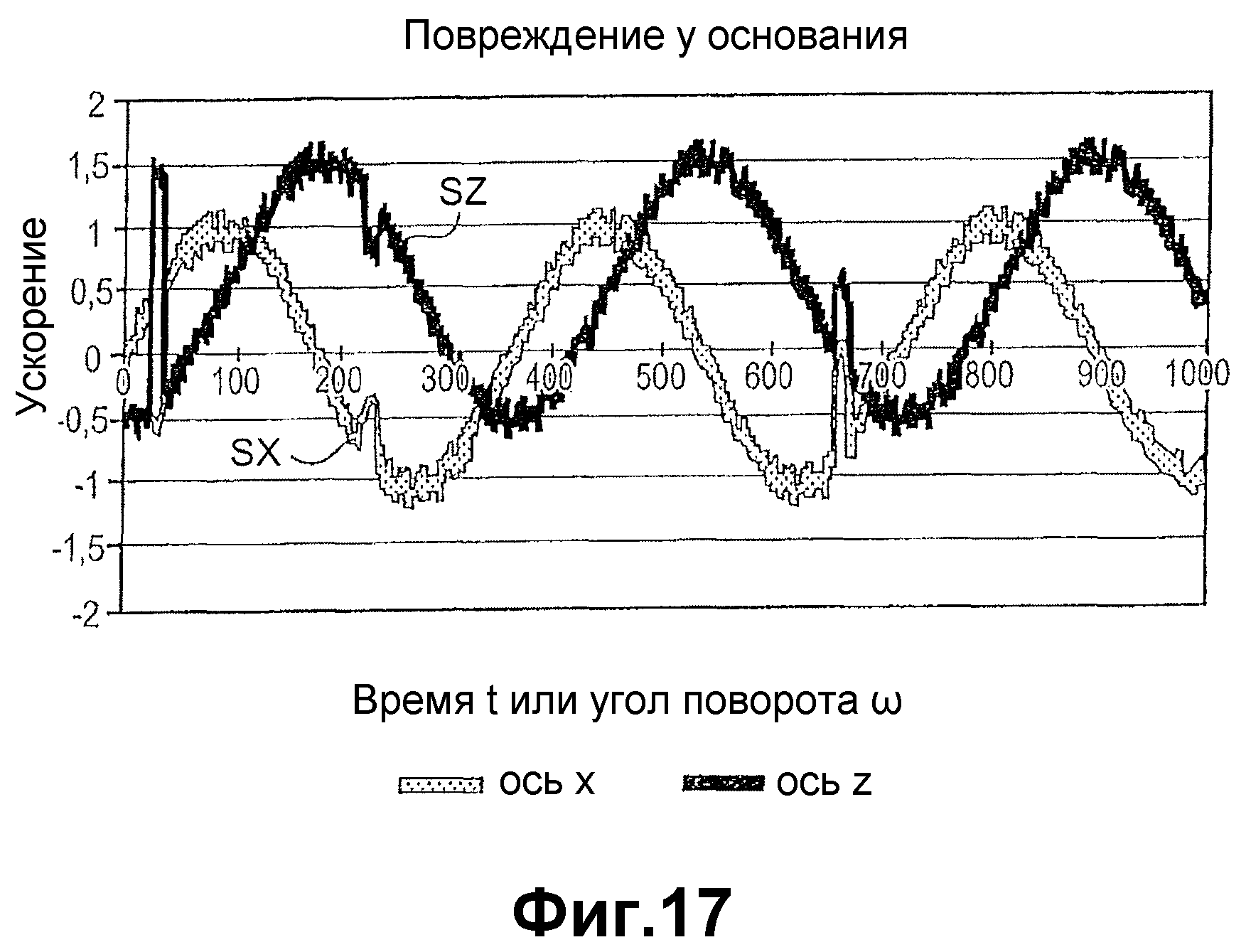
Подобным образом, посредством блока оценки, настроенного согласно изобретению, который принимает сигналы датчиков с датчика ускорения на рельсовом транспортном средстве, повреждения в отношении основания (например, рельса) могут определяться посредством обнаружения поодиночке появляющихся значений ускорения в вертикальном направлении. Сохранение и/или передача в таком случае может осуществляться в виде кода ошибки, возможно, с временной отметкой.
В заключение, сотрясения в поперечном направлении (например, при загрузке) или сотрясения в продольном направлении (например, сотрясения маневрирования) возможны при оценке изменений ускорения в горизонтальном направлении. Блок оценки может быть настроен, чтобы детектировать их и ассоциативно связывать их с типом отклонения от номинала. Сохранение и/или передача в таком случае может осуществляться в виде кода ошибки, возможно, с временной отметкой.
Для того чтобы детектировать горизонтальные и вертикальные сотрясения, требуются значения ускорения датчика ускорения вдоль первого и значения ускорения вдоль второго осевого направления (радиального и тангенциального к вращающейся детали или валу). Вследствие предварительных сведений о компоновке датчика на вращающейся детали, направление сотрясений может логически выводиться из векторной равнодействующей ускорений. То есть, из сигналов датчиков может определяться, в каком направлении (например, вертикальном или горизонтальном) произошло сотрясение. Преимущественно, должны детектироваться сотрясения в горизонтальном направлении, которые равны или больше чем 2,4 g (g = ускорение свободного падения), так как могло бы быть выяснено, что сотрясения такой силы влекут за собой повышенную опасность повреждения или указывают на не отвечающее нормам обращение с рельсовым транспортным средством. Такие сигналы также могут сохраняться и/или передаваться со специфичным кодом ошибки и, при необходимости, временными отметками.
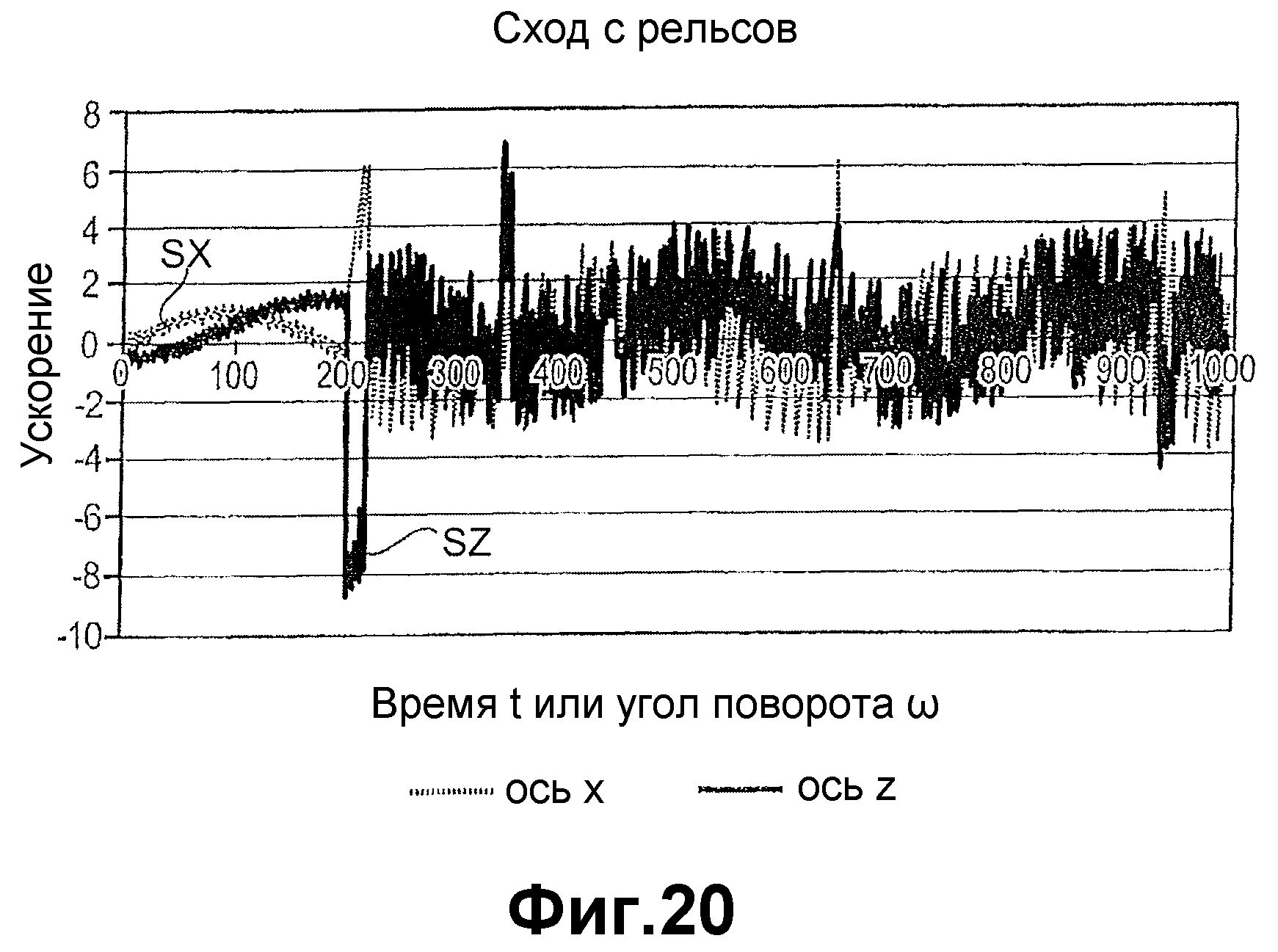
Потеря контакта между колесом и рельсом (например, при сходе с рельсов) также может обнаруживаться, например, если непрерывное наложение синусоидального сигнала со значением возмущения обнаружено на всех осях, частично с периодически повторяющейся характеристикой в вертикальном направлении с постоянным расстоянием по времени (частотой разнесения шпал).
Посредством регистрации непериодических значений ускорения (вибрации) без периодического сигнала, измеряемого тем временем (то есть ось не вращается), может определяться блокировка колес. Обнаружение этого отклонения от номинала накладывает повышенные требования на электронику, так как это отклонение от номинала может возникать из-за остановки. Поэтому, блок оценки преимущественно должен быть выполнен из условия, чтобы он был способным к определению движения рельсового транспортного средства с и без вращения колес или вала. Для этого устройство может иметь дополнительный датчик вибраций на оси транспортного средства, который определяет начало движения транспортного средства на основании повышенной вибрации транспортного средства, и только затем приводится в действие датчик ускорения. Это может значительно уменьшать потребление энергии. Это также преимущественно может использоваться для определения очередности вагонов.
Преимущественно, блок оценки также может быть настроен для определения или дополнительной проверки частоты вращения оси посредством оценки постоянной составляющей, наведенной центробежной силой во втором осевом направлении (радиальном направлении). Эта величина может использоваться для контроля или проверки достоверности других сигналов датчиков. Постоянная составляющая, вызванная центробежной силой, может избегаться посредством использования двух датчиков тангенциального ускорения, прикрепленных к валу преимущественно под углом 90°.
Согласно полезному аспекту изобретения, также предусмотрен способ контроля рельсового транспортного средства. В этом отношении, измеряется статическое ускорение вдоль по меньшей мере первой оси, при этом ось вращается в поле тяготения земли согласно движению вращения колес транспортного средства из условия, чтобы соотношение измеренного статического ускорения изменялось вследствие углового отклонения первой оси по отношению к полю тяготения земли. Из измеренных значений ускорения в одном, двух или трех осевых направлениях (как пояснено ранее), в таком случае, рассчитывается скорость перемещения или пробег в милях, либо то и другое. Кроме того, частота вращения движения вращения, например, вращающейся детали (например, колес, вала, ступицы и т.д.), пробег в милях, скорость (частота синусоидального сигнала), направление перемещения (из фазировки двух синусоидальных сигналов) и многочисленные разные другие сигналы и по меньшей мере одно возмущение или состояние отклонения от номинала рельсового транспортного средства могут определяться по сигналам ускорения.
Полезный аспект настоящего изобретения также состоит в том, что рельсовые транспортные средства могут модернизироваться устройством согласно изобретению без особого вмешательства и простым недорогим способом. Поэтому настоящее изобретение также предусматривает способ модернизации рельсовых транспортных средств с колесами, в котором рельсовые транспортные средства оборудованы устройством для контроля рельсового транспортного средства. В этом отношении, могут использоваться устройства согласно одному или более аспектам изобретения, как пояснено ранее. Может быть полезным присоединять один или каждый вал рельсового транспортного средства, вагона рельсового транспортного средства или каждого из вагонов, включающих в себя тяговое транспортное средство (одно или более), к одному или более устройствам способом согласно изобретению.
В этом отношении, датчик ускорения, который может определять статическое ускорение вдоль по меньшей мере одной оси, может быть расположен на вращающейся детали (например, преимущественно на валу, соединяющем два колеса) рельсового транспортного средства из условия, чтобы датчик ускорения двигался при движении вращения колес транспортного средства (преимущественно пропорционально скорости перемещения) так, чтобы соотношение ускорения свободного падения, измеренного датчиком ускорения, изменялось вследствие углового отклонения оси по отношению к полю тяготения земли. В дополнение, блок оценки должен быть предусмотрен непосредственно в датчике ускорения, соответственно, также на вращающейся детали (например, на валу), где-нибудь на самом рельсовом транспортном средстве или вне рельсового транспортного средства. Оценка включает в себя обнаружение по меньшей мере одного отклонения от номинала или возмущения действия перемещения рельсового транспортного средства, например, такого как блокировка колес. Преимущественно, передача уже, по меньшей мере, частично оцененных выходных сигналов датчика ускорения осуществляется беспроводным способом, например, в виде показания в километрах и/или кода ошибки. Посредством компоновки на валу согласно изобретению избегается какое бы то ни было значительное вмешательство в рельсовое транспортное средство, которое требуется состоящими из двух частей системами измерительного преобразователя и датчика. В дополнение, избегается источник отклонения от номинала отсутствующей регулировки измерительного преобразователя и датчика, неизбежный в состоящих из двух частей системах. Все из важных значений транспортного средства (пробег в милях, скорость, отклонение от номинала, диагностика шасси) могут определяться посредством компактного датчика (устройства), например, на валу рельсового транспортного средства.
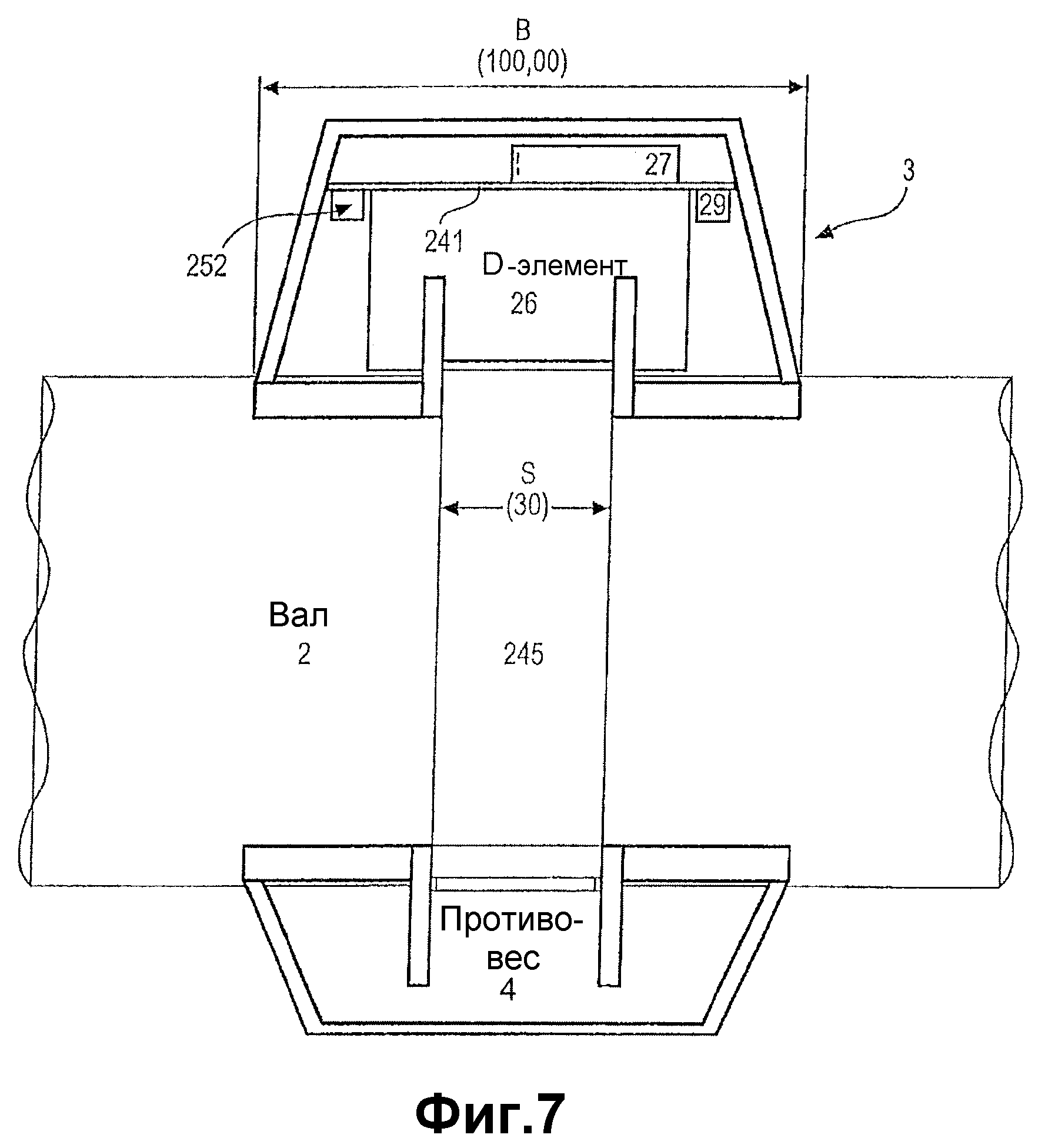
В полезной конфигурации устройство прикреплено к валу или валу оси транспортного средства, либо, иначе, оси грузового вагона, круговым стальным бандажом, который дополнительно уменьшает объем работ по модернизации. В этом отношении, преимущественно, могут применяться материалы, которые сохраняют низкой коррозию между стальным бандажом и валом. В частности, слой пластикового материала или полимера также может быть вставлен между валом и стальным бандажом. Стало очевидным, что устройство, в котором размещена очень разная электроника, фильтры местоположения, датчики тормозов и/или температуры, инфракрасные датчики и/или датчики расстояния, датчик движения, датчик вибраций, датчик ускорения и/или электроника оценки, должно быть расположено на валу оси транспортного средства. Преимущественно, устройство может быть выполнено из условия, чтобы крутящие силы как можно меньше вырабатывались на устройстве (например, устройствах). Поэтому, удлинение устройства (устройств) по отношению к валу (вдоль центральной оси вала) может быть как можно меньшим. Компоновка устройства (устройств) приблизительно в центре вала оси транспортного средства также полезна. Отношение высоты H к ширине B устройства (размеров корпуса) не должно быть ниже H:B=1:2; таким образом, устройство должно максимально выступать из вала в радиальном направлении всего лишь в половину того, насколько оно проходит в осевом направлении вала. Это способствует прикреплению круговым стальным бандажом (или, иначе, двумя параллельными стальными бандажами). По отношению к диаметру D вала рельсового транспортного средства высота H и ширина B устройства могут приблизительно находиться в отношении: D:H:B=4:1:2. Если также рассматривать ширину стального бандажа S, соответственно, результатом является следующее приблизительное преимущественное соотношение: D:H:B:S=6:1,5:3,3:1. Преимущественно, оно не должно отклоняться от этого соотношения на более чем 50%. Стало очевидным, что сопротивление крутящим силам, в силу этого, увеличивается.
Кроме датчика ускорения батарея, микропроцессор, запоминающее устройство для данных и модуль радиосвязи могут быть размещены на валу (например, валу оси транспортного средства или оси грузового вагона). В таком случае могут оцениваться выходные сигналы датчика ускорения, соответствующие вышеприведенному описанию. Преимущественно, система датчиков состоит всего лишь из компактной части, прикрепленной к вращающейся детали. Эта часть может быть жестко присоединена к вращающейся детали, например оси транспортного средства (или валу оси транспортного средства), в транспортном средстве и не должна отделяться от оси или вала транспортного средства на оси транспортного средства при ремонтных работах. В таком случае устройство может быть составляющим одно целое, компактным и легким для монтажа для того, чтобы сохранять низким объем работ по обслуживанию или модернизации. Поскольку подвижные компоненты не присутствуют в датчике, устройство согласно изобретению практически свободно от износа и не требует никаких вмешательств в шасси. Таким образом, устройство согласно изобретению, прикрепленное к вращающейся детали, например, преимущественно может быть состоящим из от одно- до трехосного (например, микромеханического или пьезоэлектрического) датчика ускорения, батареи для электропитания, микропроцессора для обработки и оценки данных, часов реального времени, памяти для промежуточного хранения данных, модуля радиосвязи для передачи данных в подходящее устройство считывания или дополнительное устройство оценки, и корпуса.
В дополнение, преимущественно, противовес должен быть предусмотрен для избежания дисбаланса. Он может быть прикрепляемым к оси или валу транспортного средства способом, подобным устройству со стальным бандажом. К тому же, может быть полезным использовать в качестве противовеса батарею. Эти компоненты могут быть защищены от внешних воздействий в корпусе и устанавливаться на ось (или вал) транспортного средства, которая должна контролироваться. Для этого не требуются никакие изменения в отношении системы, которая должна контролироваться. Для избежания дисбаланса, при сборке датчика, противовес может устанавливаться на стороне оси или вала транспортного средства у оси транспортного средства, противоположной датчику.
После пуска в эксплуатацию устройство согласно изобретению измеряет изменение силы тяжести в зависимости от угла поворота вращающейся детали (например, оси или вала, соединяющего два колеса) и оценивает данные для того, чтобы определять пробег в милях и, при необходимости, по меньшей мере одно отклонение по ним от номинала (при необходимости, наряду с ассоциативно связанным кодом ошибки). Полученная от этого информация, например, сохраняется в модуле и передается в подходящее устройство оценки, например по радио, по требованию или в предварительно заданные моменты времени для того, чтобы там определять скорость перемещения или пробег в милях. В отличие от традиционных решений, основанных на двух компонентах (первичном преобразователе и датчике), точкой отсчета системы согласно изобретению является земля или поле тяготения земли.
Согласно дополнительному аспекту изобретения, устройство, выполненное как описано выше, может быть присоединено к одной или преимущественно к каждой оси рельсового транспортного средства.
В преимущественной конфигурации изобретения блок телематики может быть предусмотрен на рельсовом транспортном средстве, который беспроводным способом принимает данные с устройства или устройств (например, одного на каждой оси транспортного средства). Эти данные могут быть скоростью, пробегом в милях, частотой вращения оси или вала транспортного средства на оси транспортного средства. Преимущественно, в особенности, передаются не сами значения ускорения (то есть, например, аналоговые сигналы датчиков), но значения, основанные на обработке данных. В этом отношении, преимущественно, здесь входят в рассмотрение: частота вращения оси транспортного средства, пробег в милях (показание в километрах), скорость, направление вращения оси транспортного средства и специфичные коды ошибок, которые могут иметь отношение к отклонениям от номинала, например, таким как блокировка колес или оси транспортного средства, сотрясения в горизонтальном или вертикальном направлении или сход с рельсов. В дополнение, момент времени и, при необходимости, продолжительность отклонения от номинала могут передаваться в отношении каждого отклонения от номинала. Блок телематики может быть настроен, чтобы пересылать данные посредством технологии мобильной радиосвязи (GSM, UMTS (универсальной системы мобильных телекоммуникаций) и т.д.). Он также может включать в себя блок GPS (глобальной системы определения местоположения) для определения положения. Блок телематики, крайне преимущественно, может включать в себя датчик вибраций для того, чтобы быть способным определять, когда транспортное средство начинает двигаться. Это предоставляет возможность сберегать энергию. Кроме мобильной радиосвязи также входит в рассмотрение связь через спутник, поскольку рельсовые транспортные средства, в частности грузовые вагоны, могут быть в дороге в зонах без требуемой инфраструктуры или покрытия сети.
Определяются и передаются не только данные, относящиеся к движению вращения вала, но также информация об отклонениях от номинала. В этом отношении, в особенности, блокировки колес, а также вертикальные или горизонтальные сотрясения входят в рассмотрение. В качестве сообщений об отклонениях от номинала блок оценки в устройстве, например, может обнаруживать повреждения подшипников, сходы с рельс или блокировки колес и назначать им код ошибки, который затем передается.
В частности, что касается выявления блокировки колес, блок оценки может быть выполнен с возможностью приведения в действие только по превышению максимального уровня вибраций. Для детектирования этого типа вибрации, преимущественно, датчик ускорения не используется, так как поглощение энергии было бы слишком высоким для этого. Стало очевидным, что полезно предусмотреть дополнительный датчик, который должен быть датчиком вибраций с очень низкой утечкой тока. Предпочтительно, он настраивается и оценивается из условия, чтобы дополнительные части схемы приводились в действие только при достаточно сильной вибрации. Для этого, например, минимальные уровни и минимальная длительность вибраций могут храниться в качестве пороговых значений в устройстве.
При блокировках колес должно учитываться, что, например, в отличие от антиблокировочной тормозной системы в настоящей системе датчиков является существенным определять, что колеса или вал, жестко присоединенный к колесам, не будут вращаться при движении рельсового транспортного средства.
В целом, электроснабжение устройства, присоединенного к оси или валу транспортного средства, должно быть выполнено из условия, чтобы оно автономно имело около 6 лет наработки без вынуждения заряжаться в промежутке. В частности, входят в рассмотрение батареи типа C (C-элементы) или типа D (D-элементы). Они располагают пригодным энергоснабжением в комбинации с выгодной конструкцией. Может быть удобным, например, использовать два C-элемента место одного D-элемента для того, чтобы распределять их по окружности вала, из условия, чтобы они, по меньшей мере, частично компенсировали друг друга относительно распределения веса. Аккумуляторы (перезаряжаемые батареи) неожиданно оказались менее пригодными. В такой мере, согласно аспекту изобретения, также предусмотрено устройство согласно одному или более аспектов, раскрытых здесь, которое включает в себя одну или более батарей с вышеупомянутыми характеристиками.
Согласно дополнительному аспекту изобретения, предусмотрено устройство, которое расположено под рельсовым транспортным средством, преимущественно на валу рельсового транспортного средства, и которое выполнено с возможностью получения характеристик нагрузки рельсового транспортного средства. Например, устройство может быть выполнено с возможностью определения состояния нагрузки рельсового транспортного средства. Устройство также может быть выполнено с возможностью идентификации нагрузки рельсового транспортного средства. Устройство также может быть выполнено с возможностью управления или регулирования загрузки или выгрузки рельсового транспортного средства. В частности, грузовые контейнеры могут подвергаться сбору данных, и преимущественно может получаться их состояние нагрузки. Для этого устройство может преимущественно использовать радиосигналы. В варианте осуществления RFID-метки (радиочастотной идентификации) на элементах груза могут считываться устройством. Для этого устройство на валу рельсового транспортного средства преимущественно имеет устройство считывания для радиосигналов. Другие способы сбора данных также входят в рассмотрение. Этот аспект изобретения преимущественно использует обстоятельство, что многие рельсовые транспортные средства, например грузовые вагоны, имеют деревянный пол, который не экранирует линию радиосвязи снизу рельсового транспортного средства. Поэтому, компоновка датчика под рельсовым транспортным средством согласно изобретению особенно пригодна для выполнения сбора данных и управления нагрузкой оттуда, которые могут использоваться оттуда для логистических целей, например, во взаимодействии с соответствующей беспроводной инфраструктурой, как она описана в материалах настоящей заявки.
Согласно дополнительным аспектам изобретения, может быть предусмотрена инфраструктура, которая собирает и централизованно оценивает данные из датчиков ускорения, прикрепленных к транспортным средствам, в частности, рельсовым транспортным средствам, таким как грузовые вагоны согласно изобретению, и приспособленных согласно изобретению. В силу этого могут быть предусмотрены использование и контроль данных, которые улучшают логистику для рельсовых транспортных средств, простым способом. В этом отношении, они добавляются благоприятным образом, при котором рельсовые транспортные средства могут модернизироваться очень просто и без очень длинной процедуры выдачи разрешения. Преимущественно, рельсовые транспортные средства могут иметь блок телематики, в котором собираются и пересылаются данные из устройств, прикрепленных к одним или более осям или валам транспортного средства из осей транспортного средства.
Согласно аспекту изобретения, было обнаружено, что датчики ускорения могут применяться в качества датчиков вращения, соответственно, для определения пробега в милях, определения скорости и т.д. и также могут определять состояния отклонения от номинала в этой функции. Поэтому особенно полезная синергетическая возможность использования датчиков ускорения появляется для связанных с вращением параметров и значений возмущения. В этом отношении, неожиданно было установлено, что датчики ускорения, размещенные для детектирования движения вращения, также могут быть сконфигурированы для детектирования наиболее важной неправильной работы рельсовых транспортных средств. В дополнение, стало очевидным, что полезно комбинировать датчики ускорения с по меньшей мере одним датчиком вибраций для того, чтобы быть способным лучше детектировать одну из наиболее важных ошибок, а именно, блокировку колес, без чрезмерного давления на высокочувствительный энергетический баланс датчика в нем. В особенности, что касается энергетического баланса, были обнаружены неожиданно в высокой степени полезные части оценки. В материалах настоящей заявки является заслуживающим внимания энергетический баланс по отношению к передаче данных, предварительной оценке и сохранению данных. Изобретение дополнительно предусматривает надежную возможность проведения различия связанного с осями или валами осей транспортного средства пробега в милях в рельсовых транспортных средствах (соответственно, пробега в милях на ось транспортного средства у рельсового транспортного средства) и для выполнения оценок транспортного средства по ним, которые проходят за пределами простого полного пробега в милях рельсового транспортного средства. В отличие от применений моторных транспортных средств в рельсовых транспортных средствах интересны другие параметры, которые требуют совершенно иной оценки и компоновки. Оценка согласно настоящему изобретению дополнительно должна быть способна к детектированию, в частности, горизонтальных сотрясений выше 2,4 g.
Мобильное устройство для считывания и регистрации данных на транспортном средстве может быть настроено для бесконфликтной связи с множеством устройств поблизости. Для этого только несколько или только одно устройство может приводиться в действие посредством специального датчика (например, датчика считывания) и задающего резонатора (например, магнита). Протоколы радиосвязи могут предусматривать другие полезные возможности, которые предоставляют возможность устанавливать связь с множеством устройств одновременно и уникально идентифицировать их на основании идентификационных номеров. В частности, на грузовом складе одновременно может быть множество грузовых вагонов, которые имеют устройство на каждой оси транспортного средства. Эти устройства преимущественно могут считываться и записываться центральной радиостанцией. В еще одной конфигурации считывание и запись осуществляются посредством мобильного устройства, которое проносится поблизости от соответственного устройства. В дополнительных конфигурациях связь с устройствами осей транспортного средства происходит посредством блока телематики. В качестве возможного, оно должно быть расположено из условия, чтобы оно могло хорошо принимать сигналы GPS, если оно предусмотрено для GPS. Удобна компоновка сбоку в верхней области рельсового транспортного средства.
В еще одной конфигурации приемник GPS также может быть расположен на валу рельсового транспортного средства. Здесь, должны приниматься во внимание возможные экранирования и отражения.
Особенно для связанных с обеспечением безопасности применений, хранение данных в устройстве должно быть не только энергонезависимым (например, ЭСППЗУ или тому подобном), но также защищенным от манипулирования. В дополнение, устройство, связанное с осью транспортного средства, может быть защищено от замены, например, мерами, такими как пломба. Устройство может шифровать внутренние данные и выдавать запрос аутентификации перед тем, как данные могут быть считаны или подвергнуты манипуляции. Здесь, может проводиться различие между людьми с разными функциями. Например, блок оценки на устройстве может предусматривать, что только определенный обслуживающий персонал одобрен для считывания или манипулирования определенными данными.
Подводя итог вышесказанному, некоторые аспекты настоящего изобретения предоставляют возможность прикрепления компонентов к рельсовому транспортному средству выгодным образом. Среди прочего, изобретение основано на понимании, что вал рельсового транспортного средства преимущественно может использоваться для прикрепления устройства, в частности электроники. Прикрепление устройства, в частности, должно быть очень надежным, но предоставлять как можно меньшую поверхность соприкосновения с валом. Таким образом, избегаются скопления воды, тем самым уменьшая коррозию вала. Эффект надреза на валу должен совершенно избегаться. Подобным образом, должно отсутствовать повреждение лака. Бандаж, используемый для прикрепления, может быть изготовлен из стали. Однако тогда удобно использовать дополнительный материл, например, такой как полимер или тому подобные, на внутренней стороне стального бандажа, соответственно, стороне, являющейся обращенной к валу. Он мог бы иметь выпуклый профиль или, иначе, профиль автопокрышки на стороне, обращенной к валу. Таким образом, поверхность соприкосновения дополнительно сокращается, а материалы защищены. В качестве материала прикрепления, в частности, могут рассматриваться более мягкие материалы, чем у вала или слоя лака на валу. Выпуклости и профили покрышки также могут использоваться на стороне, обращенной к стальному бандажу, поскольку здесь также могут быть уместны аспекты коррозии. Прикрепление устройства к валу должно быть нескользким.
Важная характеристика, которая могла бы определяться устройством на валу рельсового транспортного средства, состоит в том, уменьшается ли перемещение рельсового транспортного средства вследствие действия тормозов или по другим причинам. В этом отношении устройство, в частности, может быть выполнено из условия, чтобы оно могло проводить различие между подъемом и торможением транспортного средства. Для этого, преимущественно, акустический датчик может быть предусмотрен на устройстве, расположенном на валу. Электроника в таком случае может быть выполнена с возможностью оценки характеристических волн или спектров. Подобным образом, входит в рассмотрение применение инфракрасного датчика в устройстве на валу. Таким образом, могут идентифицироваться так называемые горячие буксы. Инфракрасный датчик, в частности, может использоваться в импульсной или интервальной работе. Таким образом, могут достигаться длительные времена наработки инфракрасного датчика. Это имеет особую важность при применении на рельсовых транспортных средствах.
Соответственно, настоящее изобретение в целом относится к устройствам и способам, связанным с теми, которые основаны на прикреплении устройства к валу рельсовых транспортных средств. Эти устройства преимущественно могут включать в себя один или более описанных выше датчиков и/или один или более аспектов изобретения. Для этого устройство может включать в себя одну или более деталей, которые по отдельности или совместно присоединены к валу рельсового транспортного средства. В этом отношении они могут быть расположены, чтобы минимизировать центробежные или крутящие силы. Часть электроники также может быть предусмотрена в другом местоположении на рельсовом транспортном средстве (блоке телематики) при условии, что по меньшей мере одна часть электроники также прикреплена к валу.
Согласно дополнительному аспекту изобретения, устройство, прикрепленное к валу рельсового транспортного средства и сконфигурированное согласно одному из вышеприведенных аспектов изобретения, дополнительно может быть выполнено с возможностью определения частоты собственных колебаний вала. В частности, устройство может быть выполнено с возможностью определения изменения частоты собственных колебаний. Этот аспект изобретения основан на понимании, что повреждения и меняющиеся механические нагрузки вала могут давать в результате сдвиг частоты свободных колебаний вала. В действии, вал возбуждается собственными колебаниями очень разными способами. Они могут непрерывно детектироваться в устройстве согласно изобретению, которое прикреплено к валу рельсового транспортного средства. Если отклонение частоты свободных колебаний превышает некоторое пороговое значение, соответственно, может инициироваться аварийный сигнал, если изменение указывает, что вал поврежден. Подобным образом, могут оцениваться изменения частоты свободных колебаний относительно механического напряжения или износа вала. В частности, блок оценки в пределах устройства на валу сконфигурирован для выполнения этой оценки изменения частоты свободных колебаний. Согласно этому аспекту изобретения, соответственно, устройство выполнено с возможностью использования собственной частоты вала рельсового транспортного средства посредством устройства, прикрепленного к валу, для того, чтобы выполнять анализ повреждений при текущей работе, в частности, во время перемещения рельсового транспортного средства.
Согласно дополнительному аспекту изобретения, отдельное возбуждение колебаний вала не требуется. Скорее, для этого используются нормальные обычные возбуждения вала. Кроме того, устройство может быть выполнено с возможностью определения механического напряжения вала посредством сдвига частоты свободных колебаний вала. В частности, образование трещин на валу может иметь следствием изменение собственной частоты (частоты свободных колебаний). Этим способом повреждения в отношении колесных пар грузового вагона могут идентифицироваться на ранней стадии и во время текущей работы. Подобным образом можно измерять вес фактической нагрузки. Устройство на валу, в частности, выполнено с возможностью использования сотрясений, например, при погрузке и разгрузке, при маневрировании или при прохождении через выпуклости, например, стрелки или стыки между рельсами, а также посредством легких сотрясений на беговой поверхности и/или на рельсах для возбуждения собственных колебаний вала колесной пары.
Для этого устройство согласно изобретению может иметь вибродатчики (например, датчики ускорения, микрофоны порождаемого конструкцией шума и т.д.), которые выполнены с возможностью детектирования и для анализа собственных колебаний вала. Согласно аспекту изобретения, анализ колебаний может осуществляться непосредственно в устройстве на валу и сравниваться с установками. Отклонение от установки может определяться с указанием идентификации устройства на валу по отношению к определенной колесной паре или определенному вагону и, например, пересылаться посредством радиосвязи. Посредством сравнения с установкой собственных колебаний или посредством сравнения спектров собственных колебаний, соответственно, может на ранней стадии определяться, вырисовываются ли повреждения в отношении вала, и может ли из этого проистекать опасность.
Согласно аспекту изобретения, устройство согласно изобретению выполнено с возможностью определения изгибного напряжения вала посредством определения частоты свободных колебаний. Изгибное напряжение является результатом смещенных точек приложения нагрузки, которая должна поддерживаться валом, но также под собственным весом самого вала. Стало очевидным, что изгибное напряжение вала может изменять собственную частоту вала. Устройство согласно изобретению, поэтому, в частности, выполнено с возможностью определения этого сдвига собственной частоты, обусловленного изгибным напряжением. Отсюда, согласно дополнительному аспекту изобретения, может определяться вес фактической полезной нагрузки вагона. Чем больше вес полезной нагрузки, тем больше изгибное напряжение вала и, соответственно, сдвиг собственной частоты вала. Это может преимущественно использоваться, в частности, с неповрежденным валом. При поврежденном вале (например, при образовании трещин), кроме описанного ранее эффекта изменения спектра собственных частот при изгибной нагрузке, также может детектироваться предел прочности при изгибе вала в зависимости от угла поворота вала. Тем самым, с вращающимся валом спектр собственных частот вала модулируется частотой вращения вала. В таком случае устройство согласно изобретению может быть выполнено с возможностью выявления этой модуляции. Анализ повреждений согласно аспекту изобретения, соответственно, может включать в себя оценку модуляции собственной частоты вала частотой вращения вала. Изобретение также относится к способу согласно одному из вышеприведенных аспектов, в котором изменение собственной частоты фиксируется и оценивается. Способы и устройства для определения и оценки изменения собственной частоты преимущественно могут комбинироваться с одним или более из дополнительных аспектов изобретения, упомянутых выше и ниже. В частности, датчик, который может определять сдвиг собственной частоты или частоты свободных колебаний, преимущественно предусмотрен на валу рельсового транспортного средства.
Дополнительные аспекты настоящего изобретения очевидны из описания предпочтительных вариантов осуществления, основанного на прилагаемых фигурах, на которых:
- фиг.1 показывает устройство, размещенное на валу рельсового транспортного средства, согласно аспектам настоящего изобретения,
- фиг.2 показывает дополнительное представление устройства, расположенного на валу,
- фиг.3 показывает упрощенную структурную схему устройства согласно варианту осуществления изобретения,
- фиг.4 показывает представление устройства на валу согласно варианту осуществления изобретения,
- фиг.5 показывает вид в разрезе и сверху двухосной тележки рельсового транспортного средства с устройством согласно аспектам изобретения,
- фиг.6 показывает представление устройства на валу согласно варианту осуществления изобретения,
- фиг.7 показывает упрощенное представление бокового поперечного разреза варианта осуществления изобретения,
- фиг.8 показывает дополнительный вид упрощенного представления варианта осуществления изобретения,
- фиг.9 показывает упрощенное представление варианта осуществления изобретения относительно компоновки на валу оси транспортного средства в рельсовом транспортном средстве,
- фиг.10 показывает упрощенное представление варианта осуществления изобретения относительно компоновки на валу оси транспортного средства в рельсовом транспортном средстве,
- фиг.11 показывает упрощенное представление рельсового транспортного средства с устройством и возможной инфраструктурой согласно аспектам изобретения,
- фиг.12 показывает представление варианта осуществления относительно датчика ускорения,
- фиг.13 показывает представление варианта осуществления относительно датчика ускорения,
- фиг.14 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению с непрерывным движением вперед транспортного средства,
- фиг.15 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению с непрерывным задним ходом,
- фиг.16 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению с непрерывным движением вперед и примерной неисправностью в колесе или подшипнике,
- фиг.17 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению с непрерывным движением вперед и примерной неисправностью на основании,
- фиг.18 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению с непрерывным движением вперед и сотрясением в горизонтальном направлении,
- фиг.19 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению с заблокированным валом,
- фиг.20 показывает схему с примерными временными траекториями двух сигналов датчика ускорения в устройстве согласно изобретению при сходе с рельсов, и
- фиг.21 показывает упрощенное представление аспектов изобретения касательно определения очередности вагонов рельсового транспортного средства.
Фиг.1 показывает упрощенное представление сечения варианта осуществления устройства согласно изобретению. Представлено колесо 1, например, рельсового транспортного средства с надстройкой (не показана). Ось или вал 2 транспортного средства по оси транспортного средства (в контексте настоящего изобретения часто для упрощения упоминаемый просто как вал) прикреплен к колесу 1, которое выступает в плоскость изображения так, что представлена только его площадь поперечного сечения. Вал 2 типично может соединять два подобных колеса 1 рельсового транспортного средства. На валу 2 расположено устройство 3, которое может быть сконфигурировано согласно разным аспектам изобретения, описанного в материалах настоящей заявки. Вполне обычно устройство расположено на валу вместо других местоположений рельсового транспортного средства. Колесо 1 катится по основанию 5, которое, например, может быть рельсом, при движении вперед или назад рельсового транспортного средства. В устройстве 3 могут быть предусмотрены очень разные датчики, например, микропроцессор, память, в частности, полупроводниковая память, модуль радиосвязи или модули радиосвязи для приема и/или передачи данных. В такой мере частичная или полная предварительная обработка принятых или собранных данных уже может быть осуществлена в пределах устройства 3. В таком случае, на основании сигналов датчиков, среди прочего могут определяться пройденное расстояние (пробег в милях), остановка, блокировка колес, скорость, аномальные рабочие состояния (износ, сход с рельсов), повреждения пути, сотрясения маневрирования и продолжительность работы, температуры, положения, состояния транспортных средств, рабочие состояния и т.д.
Фиг.2 показывает еще одно упрощенное представление варианта осуществления согласно фиг.1. Проиллюстрированы колеса 1 и вал 2 рельсового транспортного средства, на которых расположено устройство согласно варианту осуществления изобретения. В частности, может быть видно устройство 3, которое может включать в себя датчики и дополнительные электронные компоненты для предварительной обработки и передачи данных, как пояснено ранее. Надстройка рельсового транспортного средства может быть сконструирована совершенно по-разному, и по этой причине прикрепление устройства к валу является особенно выгодным.
Фиг.3 показывает упрощенную структурную схему устройства 3, как оно может быть прикреплено к валу 2 рельсового транспортного средства. Устройство 3 может включать в себя разные датчики в зависимости от конфигурации и обработки, хранения и пересылки их сигналов на разное расстояние. В частности, датчиками могут быть инфракрасный датчик 256 для измерения температуры, датчик 257 порождаемого конструкцией шума для фиксации вибраций вала, датчик 21 ускорения, датчик 258 расстояния, приемник 255 GPS для определения положения, датчик 253 фильтра местоположения, зависящий от реализованной функции фильтрации местоположения, датчик 252 вибраций и/или датчик 251 считывания.
Инфракрасный датчик 256 может оценивать инфракрасные сигналы для того, чтобы, таким образом, определять температуру вала, колеса 1 или других частей рельсового транспортного средства или окружающей среды. Полезным применением измерения температуры в комбинации с инфракрасным датчиком является идентификация горячих букс. Соответствующее сообщение об отклонении от номинала, в таком случае, может сохраняться и/или передаваться устройством наружу. В силу этого можно избежать повреждений. Инфракрасный датчик преимущественно может быть импульсным и/или приводиться в действие на интервалах, чтобы потреблять только низкую мощность. Инфракрасный датчик преимущественно может применяться для формирования изображения тормозного диска.
Датчик 257 торможения по порождаемому конструкцией шуму обычно может служить для определения, тормозится он или нет. Тем самым, может определяться, замедляется ли перемещение, например, вследствие подъема или потому, что он тормозится. При использовании датчика порождаемого конструкцией шума могут детектироваться характеристические волны или спектры.
Датчик 21 ускорения может измерять статическое ускорение в одном, двух и/или трех направлениях (оси X, Y и Z согласно фиг.1 и 2) и соответственно выдает три сигнала SX, SY и SZ, ассоциативно связанных с осями (3-мерный датчик). В упрощенных реализациях он также может быть 1- или 2-мерным датчиком. В настоящем варианте осуществления они являются аналоговыми сигналами, а потому сначала оцифровываются в аналого-цифровом преобразователе 22. Оцифрованные сигналы датчиков затем подаются в логический узел 231 оценки, присоединенный к аналого-цифровому преобразователю 22. Логический узел 231 оценки или программа оценки, которая, в наипростейшем случае, является пригодной только для сохранения принятых данных датчика в запоминающем устройстве 24 для данных и/или для передачи этих данных посредством модуля 27 радиосвязи через антенну 29 в дополнительный блок оценки, может быть присоединена проводами или реализована в качестве встроенной микроконтроллерной системы. Кроме того, устройство 3 может включать в себя логический 25 узел приведения в действие и обнаружение 253 движения, которые предусматривают, чтобы устройство включалось, только если требуется. Для этого логический 25 узел приведения в действие может быть присоединен к датчику 251 считывания, возбуждаемому для считывания или регистрации данных из или в устройстве 3 посредством внешнего поля. Это может происходить при приближении устройства 12 записи/считывания (описанного позже). Датчик 251 считывания, в частности, может приводиться в действие по той причине, что магнит временно удерживается поблизости (в нескольких сантиметрах) датчика 3 пробега в милях. Преимущество использования датчика считывания состоит в том, что он сам не требует энергии, но только логический 25 узел приведения в действие потребляет ток. Однако утечка тока логического 25 узла приведения в действие может сохраняться очень низкой. Датчик считывания является очень дешевым. Он не имеет контактов и является бесконтактным, и, тем самым, может быть без проблем интегрирован в надежный корпус. Дополнительное преимущество может быть достигнуто, если небольшое расстояние между магнитом и устройством 3 задано для приведения в действие. В силу этого, можно специально приводить в действие только определенное устройство 3, если несколько устройств 3 установлено на грузовом вагоне.
Логический узел 253 обнаружения движения преимущественно может быть присоединен к датчику 252 вибраций. Вследствие длительного времени от 6 до 7 лет, в течение которого устройство 3 должно автономно работать, полезно адаптированное управление потреблением энергии. Датчик 252 вибраций должен быть сконфигурирован, насколько возможно, для одинакового улавливания вибраций во всех направлениях. Утечка тока также должна быть очень низкой. Преимущественный датчик вибраций для применения в настоящем варианте осуществления может быть датчиком вибраций согласно принципу шарового переключателя. Датчик 252 вибраций может быть присоединенным к напряжению с большим последовательным резистором и присоединенным к логическому узлу 253 обнаружения движения. Он предусматривает, что фронт формируется в сигнале с каждой вибрацией. Эти фронты преимущественно интегрируются (подсчитываются). Приведение в действие устройства 3 осуществляется, только если было превышено максимальное количество фронтов (вибраций) (например, в пределах определенного временного окна). В силу этого может гарантироваться, что приведение в действие не осуществляется слишком часто или слишком низкими вибрациями в результате погрузки рельсового транспортного средства. Вибрация может сохраняться в устройстве в качестве параметра в виде уровня шума или максимального количества вибраций. В силу этого могут приниматься во внимание специфичные особенности транспортного средства или использования. В таком случае посредством приведения в действие устройства 3 также приводится в действие только датчик 21 ускорения, который применяется для определения вращения вала 2. В силу этого преимущественно может определяться, вращается ли вал 2, и, при необходимости, присутствует ли блокировка колес.
Также может быть предусмотрено тактирование 28 для обеспечения временной развертки (например, в реальном времени и/или тактирования для компонентов устройства и для оценки сигналов посредством временной нормали). Батарея 26 выдает требуемую энергию, при этом, конечно, в качестве альтернативы также могут быть предусмотрены аккумуляторы или другие генераторы энергии, которые предоставляют возможность автономной работы устройства 3. Преимущественно, входят в рассмотрение батареи, которые выдают 8 А-ч (ампер-часов) или 19 А-ч. Это имеет место с C-элементами или D-элементами. В силу этого наработка от 6 до 7 лет может достигаться с устройством 3, установленным согласно изобретению.
Оценка в блоке 23 может расширяться за пределы промежуточного хранения и/или передачи данных SX, SY и/или SZ датчика. Может быть предусмотрено выполнение определенных этапов оценки уже в пределах устройства 3 для сокращения объема данных для сохранения/передачи или для становления последующей оценки необязательной. Таким образом, например, количество оборотов колес или пройденное расстояние могли бы выдаваться непосредственно на основании сигналов SX, SY и SZ датчика. В дополнение, некоторые сигналы отклонения от номинала (блокировка колес) могли бы рассчитываться и/или передаваться с указаниями времени, такими как момент времени и/или продолжительность отклонения от номинала. Однако такая оценка данных также может осуществляться в отдельном блоке оценки, прикрепленном к рельсовому транспортному средству или предусмотренном стационарно вне рельсового транспортного средства. Таким образом, логический узел 231 оценки, в частности, может обеспечивать: расчет частоты вращения, идентификацию направления, расчет скорости, расчет пробега в милях в комбинации с одним или более отклонениями от номинала, такими как детектор сотрясения из-за маневрирования (например, с предельным значением >2,4 g), детектор сотрясения из-за рельсов, детектор плоской поверхности, детектор схода с рельсов и/или детектор блокировки.
Вместо модуля 27 радиосвязи также могут быть предусмотрены другие интерфейсы, которые предоставляют возможность беспроводного или проводного считывания данных датчика ускорения. В частности, в рассмотрение входят GSM, Bluetooth, UMTS, WLAN или другие интерфейсы радиосвязи.
Посредством каскада 233 конфигурирования устройство может предварительно конфигурироваться под разные ситуации. Кроме того, может быть предусмотрен каскад 232 аварийного сигнала, который инициирует аварийный сигнал при обнаруженных отклонениях от номинала.
Стало очевидным, что полезно предварительно обрабатывать многочисленные данные датчиков, например, такие как данные SX, SY, SZ датчика в устройстве 3, как описано выше, и выдавать или передавать уже рассчитанные величины (пробег в милях или показание в километрах, блокировку колес, коды ошибок и т.д.). Это, в частности, полезно в связи с блоком 13 телематики (описанным позже), который принимает данные одного или более устройств 3, которые могут быть прикреплены к нескольким осям 2 транспортного средства в рельсовом транспортном средстве. Соответственно, устройство 3 может быть связано с валом 2 рельсового транспортного средства.
Устройство 3 может быть сконфигурировано для приема и сохранения важных параметров. Например, диаметр (или радиус) колеса соответствует этому для того, чтобы быть способным рассчитывать пробег в милях. В дополнение, различные специфичные транспортному средству параметры, например, такие как уровень шумового сигнала или амплитуда шумового сигнала при блокировке колес или сходе с рельсов, предыстория рельсового транспортного средства (уже пройденные километры или год производства), преимущественно могут регистрироваться в запоминающем устройстве 24 из устройства. В дополнение, могут регистрироваться максимальные значения для вертикальных или горизонтальных сотрясений (например, 2,4 g, при этом g - ускорение свободного падения). Вследствие этих параметров устройство 3 способно автономно рассчитывать некоторые специфичные вращению или вызванные отклонением от номинала величины и выводить результаты. Вывод может осуществляться в виде полных кодов ошибки и значений в километрах. Согласно дополнительному аспекту изобретения, параметры и/или рассчитанные значения защищены от манипулирования в устройстве 3. То есть, могут использоваться способы шифрования.
Фиг.4 показывает сечение рельсового транспортного средства, на котором пояснены измерение температуры и использование датчика IMG изображения. В целом, устройство 3 расположено на валу 2 оси транспортного средства в рельсовом транспортном средстве. Оно движется с валом 2, при этом устройство, тем самым, вращается вокруг вала. Это вращение осуществляется в соответствии с вращением колеса 1. Если в подшипнике оси возникает горячая букса, это определяется посредством датчика TEMP температуры. Датчик температуры может быть инфракрасным датчиком.
Преимущественно, устройство 3 также может иметь датчик KS порождаемого конструкцией шума. Он мог бы детектировать звуковые волны SW, которые затем оцениваются. В таком случае приведение в действие тормоза могло бы обнаруживаться акустическим образом, по звуковым волнам SW через вал, поскольку приведение в действие тормозов вызывает типичные акустические образы (спектры, гармоники и т.д.). Другие состояния отклонения от номинала или условия отклонения от номинала также могли бы обнаруживаться датчиком порождаемого конструкцией шума.
Датчик IMG изображения также мог бы быть предусмотрен в устройстве на валу согласно изобретению. Датчик IMG изображения, в таком случае, мог бы принимать изображение или, иначе, только сигнал яркости основания 5. В этом отношении, он может быть преимущественно синхронизирован с движением вращения вала. Это, например, достигается оценкой сигналов датчика ускорения, как она подробно описана ниже. Изображение основания, в таком случае, может оцениваться для определения абсолютного или, иначе, преимущественно только относительного положения в пределах известного расстояния. Для этого датчик изображения, например, может детектировать только значения яркости или некоторые цветовые значения. Детектирование всегда может осуществляться, только если датчик ориентирован вниз по направлению к основанию. В силу этого может сберегаться энергия, и может быть упрощена фильтрация местоположения. Детектированные изображения (или, иначе, только значения изображений, точки и т.д.) затем могут сравниваться с известными образами, чтобы, таким образом, определять положение.
Другие способы фильтрации изображений преимущественно могут использовать сигналы датчиков ускорения, как они подробно описаны позже.
Фиг.5 показывает дополнительные аспекты изобретения. Устройство 3 согласно изобретению, как правило, расположено на вале рельсового транспортного средства согласно одному или более аспектам изобретения. Устройство 3 может содержать в себе один или более из ранее и позже упомянутых датчиков и соответствующие средства оценки и/или хранения и/или беспроводной передачи данных. Устройство 3 преимущественно расположено на рельсовом транспортном средстве с двухосной тележкой, как проиллюстрировано на фиг.5. Преимущественно, устройство 3 может быть расположено не точно в середине M вала 2. Это предоставляет большее пространство при вращении вокруг вала 2. Кроме того, в этом положении часто преимущественно имеется линия визирования по днищу транспортного контейнера рельсового транспортного средства. Например, это преимущественно предоставляет возможность измерения расстояния для определения состояния нагрузки. Устройства 3 согласно изобретению могут быть расположены на одном или более валов 2 двухосной тележки. Пружина 7 находится за пределами колес. Это преимущественно применяется, так как, в силу этого, имеется свободный обзор с устройства 3 на колеса 1. Это предоставляет возможность осуществления других ранее и позже упомянутых измерений устройством 3.
Фиг.6 показывает дополнительный вариант осуществления изобретения. В дополнительной конфигурации может быть предусмотрен датчик 258 для измерения расстояния. Он преимущественно может быть выполнен с возможностью определения расстояния до днища грузового вагона или любых известных неподвижных частей от вала. В основном, в рассмотрение входят ультразвуковые передатчики и приемники, которые предоставляют возможность измерения расстояния ультразвуком. Однако возможно они не могут выдерживать существующие условия окружающей среды и, в вариантах, не осуществляют измерение в достаточной мере точно при вращении вала. Поэтому может быть предусмотрен преимущественно основанный на радиосвязи датчик, также как представлено на фиг.6. Передатчик, расположенный в устройстве 3, может испускать импульсные сигналы TX и измерять их обратное рассеяние RX. Из этого, может измеряться расстояние DISTX между днищем надстройки рельсового транспортного средства и валом 2 (или устройством). Этот способ, действующий в виде радара, может быть преимущественным над ультразвуком. Измерение расстояния может использоваться для определения состояния нагрузки рельсового средства, например грузового вагона. Вследствие пружины 7 рельсового транспортного средства, расстояние DISTX между валом 2 оси транспортного средства и днищем надстройки уменьшается, когда транспортное средство нагружено. Вследствие этого данное расстояние может использоваться для измерения нагрузки. Преимущественно, измерение расстояния может синхронизироваться с движением вращения оси. Для этого могут использоваться датчики ускорения согласно многочисленным аспектам изобретения. В силу этого расстояние до определенной поверхности обратного рассеяния может специально определяться при некоторой ориентации вала, преимущественно, вверх. Здесь, также является удобным прикрепление отражателя радара, который вырабатывает определенный воспроизводимый отраженный сигнал. Такой отражатель порождает очень сильное отражение сигнала благодаря своим форме и размеру, адаптированным к частоте радара. В силу этого отраженный сигнал может очень хорошо различаться от отражений других компонентов днища вагона. Преимущественно, отражатель радара может быть прикреплен к днищу вагона над валом.
Более того, синхронизация измерения расстояния с вращательным движением оси также приводит к уменьшению энергии, требуемой для выработки сигнала.
Фиг.7 показывает упрощенное представление варианта осуществления изобретения. В этом представлении физическая конфигурация и прикрепление к валу 2 оси транспортного средства в рельсовом транспортном средстве находятся на переднем плане. Преимущественно, устройство 3 размещено в прочном корпусе. Батарея 26 (здесь, например, D-элемент) должна быть расположена на валу 2 как можно компактнее. Основная форма корпуса для устройства 3 может быть выполнена более широкой на валу. Упомянутые аспекты имеют благоприятные влияния на возникающие силы, которые могут становиться чрезвычайно высокими в настоящей заявке. Устройство 3 может быть прикреплено посредством одного или более круговых стальных бандажей 245. Это предоставляет возможность модернизации с минимальным расходованием времени. Преимущественно, ширина S стального бандажа 245 может составлять приблизительно S=30 мм. Ширина B устройства 3 в осевом направлении вала, в таком случае, преимущественно не может превышать 100 мм. Соотношение между шириной S стального бандажа 245 и шириной устройства 3 может быть около S:B=1:3,3. На противоположной стороне вала 2 предусмотрен противовес 4 для того, чтобы уравновешивать дисбаланс. В поперечном разрезе корпуса устройства 3 и противовеса 4 имеют приблизительно трапецеидальный профиль или широкое основание. Полукруглый или арочный профиль также входят в рассмотрение. Избежание крутящих сил на модуле 3 датчика является важным. Электронные приборы могут быть прикреплены во внешней области устройства 3. На этом схематическом представлении плата 241, датчик 252 вибраций, модуль 27 радиосвязи и антенна 29 показаны в качестве представителей электронных приборов, взятых в целом. Датчик 252 вибраций и антенна 29 расположены в части платы, перекрывающей батарею 26, а именно на внутренней стороне (обращенной к валу) платы 241. Запоминающее устройство (не показано) должно быть энергонезависимой памятью (например, ЭСППЗУ). Преимущественно, устройство 3 может быть расположено посередине вала 2 или оси транспортного средства.
Фиг.8 показывает сечение через вал 2, а также устройство 3 и противовес 4 для выделения дополнительных преимущественных аспектов изобретения. Корпуса устройства 3 и противовеса 4 закруглены в направлении вдоль окружности вала 2 и, тем самым, лучше адаптируются к окружности вала. Усиливающие элементы 242 жесткости могут быть предусмотрены для поглощения крутящих и других сил. Стальной бандаж 245 проходит вокруг вала 2 и через каналы 243 корпусов для устройства 3 и противовеса 4. В устройстве батарея 26, плата 241, модуль 247 радиосвязи и датчик 252 вибраций указаны с упрощением. Часть или все дополнительные электронные приборы расположены на этом месте, как представлено на фиг.3. В частности, также имеется датчик 21 ускорения. Высота H устройства может быть в диапазоне H=45 мм. Таким образом, отношение высоты H к ширине B устройства может составлять приблизительно H:B=1:2. Вал может иметь диаметр D 173 мм, при этом D=160 мм и, при необходимости, изменяющиеся диаметры также входят в рассмотрение. Поэтому полезно использование стального бандажа, длина которого может гибко регулироваться, чтобы приспосабливаться к разным диаметрам вала. Посредством использования стального бандажа и корпусов с каналами 243 облегчается операция модернизации. Смещение устройства 3 и противовеса 4 под стальным бандажом предотвращается заданным высоким контактным давлением на ось или вал транспортного средства и, преимущественно, механической прочностью двух частей корпуса под стальным бандажом.
Сила сцепления между валом 2 и круговым бандажом 245 должна быть выбрана из условия, чтобы не возникал эффект надреза на валу 2. Повреждения лакового слоя на валу 2 также нужно избегать.
Задание размеров устройства по отношению к диаметру оси или вала, соответственно, может иметь результатом следующее: D:B:H:S=180:100:45:30=6:3,3:1,5:1. Преимущественно, оно не может значительно отклоняться от этих значений (таким образом, соответственно, не более чем отклонение 50%), если целью является прикрепление к валу 2 стальным бандажом простым способом.
Дополнительным аспектом является коррозия между стальным бандажом 245 и валом 2. Может быть полезно обеспечивать дополнительный слой 244 между стальным бандажом 245 и валом 2, который пригоден для предотвращения коррозии. Этот слой 244 представлен для иллюстрации на части окружности вала 2, но проходил бы полностью вокруг вала 2 под стальным бандажом 245. Сторона слоя 244, обращенная к валу 2, в таком случае, могла бы иметь выпуклости или, иначе, профиль покрышки. Преимущественно, она могла бы быть сконфигурирована из условия, чтобы присутствовало надежное прикрепление, однако, которое не влечет за собой повреждения в отношении вала и удерживает как можно меньше влаги. Опорные элементы 247 (в виде подошвы) скошены, чтобы приспосабливаться к кривизне вала. Это повышает прочность и сопротивление крутящим, центробежным и создающим ускорение силам. Посредством использования множества скошенных подошв на внешних частях корпуса в результате происходит самовыравнивание датчика на оси, благодаря которому при сборке может гарантироваться, что оси измерения внутренних датчиков ориентированы точно параллельно или ортогонально валу.
Фиг.9 показывает соответственную конфигурацию дополнительной преимущественной конфигурации присоединения устройства 3 к валу 2. В этой конфигурации применяются два круговых бандажа 254 (например, стальных бандажа). Таким образом, склонность к коррозии может дополнительно снижаться. В этой связи конфигурация может быть подобна такой, как описана ранее. Соотношения размеров, в таком случае, были перенесены на два бандажа, при этом вместо ширины S стального бандажа 254 на фиг.8 теперь должно рассматриваться расстояние наружных кромок двух стальных бандажей.
Фиг.10 показывает представление в перспективе дополнительной преимущественной конфигурации присоединения устройства 3 к валу 2. В этом варианте осуществления предусмотрена замкнутая круговая гильза, в которой устройство 3 может быть размещено наряду с необязательным противовесом. Окружающий корпус обеспечивает дополнительную защиту от разбивания камнем, истирания, манипулирования и т.д. Гильза также предоставляет преимущества относительно крутящих сил. Стальные бандажи 254 теперь проходят вокруг один раз снаружи гильзы. Здесь, должно быть теперь рассмотрено расстояние стальных бандажей по отношению к заданным выше измерениям.
Фиг.11 показывает схематический вид сбоку рельсового транспортного средства 16 (вагона, локомотива и т.д.) с устройством согласно изобретению и необязательной инфраструктурой для беспроводной и проводной передачи сигналов и контроля рельсового транспортного средства 16. Рельсовое транспортное средство 16 имеет устройство 3 и противовес 4 на валу 2. Для этого входят в рассмотрение оба показанных вала 2. Устройство 3 может быть сконфигурировано, как описано в материалах настоящей заявки. Данные, полученные и, при необходимости, предварительно оцененные устройством 3, могут передаваться в центр 15 по разным трактам. Бортовой блок 13 телематики со средством радиосвязи может быть расположен на рельсовом транспортном средстве 16 и принимает сигналы датчиков (например, пробег в милях и, при необходимости, дополнительную информацию или результаты предварительной оценки, в частности код ошибки, момент времени начала движения и т.д.), переданные устройством 3 через линию 17 радиосвязи, и передает их в центр 15 через вторую линию 20 радиосвязи. Блок телематики преимущественно включает в себя микроконтроллер, интерфейс радиосвязи, память, модули для GPS, GSM, Bluetooth и/или UMTS, батарею и/или датчик вибраций, а также, при необходимости, многочисленные дополнительные датчики. Кроме того, стационарное средство 14 радиосвязи может принимать сигналы датчиков через линию 18 радиосвязи и передавать их через дополнительную беспроводную или проводную линию 19 связи в центр 15. Линия 18 радиосвязи также может действовать согласно обычным стандартам мобильной радиосвязи (например, GSM или UMTS). Данные могут собираться централизованно и оцениваться в центре 15. В качестве дополнительной опции данные могут приниматься мобильным устройством 12 через беспроводную или проводную линию 11 связи. Параметры также могут настраиваться и изменяться в устройстве 3 через линии 17, 18 и 11 связи. Хотя на рельсовом транспортном средстве могут происходить более сильные отражения, чем при более низких частотах, линия 17 радиосвязи преимущественно может использовать высокочастотный диапазон 868 МГц или 2,4 ГГц. Неожиданно это оказалось удобным даже в отношении сложной инфраструктуры и сложных сценариев считывания и контроля многочисленных устройств 3. Использование более низкой радиочастоты, особенно одобренное для работы железной дороги, было бы полезным по отношению к условиям распространения волн в окружающей среде грузовых вагонов и возможным возмущениям коммунальными пользователями.
Согласно преимущественному аспекту изобретения, предусмотрено не только одно устройство 3 на валу оси транспортного средства в рельсовом транспортном средстве, но множество отдельных устройств 3, 3A и т.д. на каждом валу или оси 2 транспортного средства. Согласно этому аспекту изобретения, устройства 3, 3A связаны не только с рельсовым транспортным средством 16, но фактически с соответствующим валом или осью 2 транспортного средства. Соответственно, блок 13 телематики может поддерживать связь с обоими устройствами 3 и 3A. Существует линия 17A связи с устройством 3A. Мобильное устройство 12 также может устанавливать связь с устройством 3A через линию 11A радиосвязи. Это, в конце концов, также применяется к стационарному средству 14 радиосвязи, которое поддерживает связь со вторым устройством через линию 18A радиосвязи. Каждое устройство 3 и 3A может быть сконфигурировано, как описано в материалах настоящей заявки. Преимущественно, блок 13 телематики, например, теперь может проводить различие между устройствами 3 и 3A и, тем самым, определять, какие сигналы (начало движения, пробег в милях, скорость, направление вращения, блокировка колес, действие тормозов и т.д.) происходят с какой оси транспортного средства.
Пробег в милях грузового вагона, например, может выводиться в блоке 13 телематики из приращения отдельных пробегов в милях. Проверка истории пробега в милях и отклонений от номинала отдельных осей 2 транспортного средства особенно полезна, так как оси 2 транспортного средства могут заменяться по отдельности. Поэтому эти оси 2 транспортного средства могут иметь истории пробега в милях и отклонений от номинала, отличные от транспортного средства. Что касается обеспечения безопасности и надежности рельсового транспортного средства, эта информация имеет большую важность. В случае отклонения от номинала блок телематики может передавать аварийный сигнал в центр по радио. Таким образом, отклонения от номинала могут быстро обнаруживаться и, при необходимости, также корректироваться. Для того чтобы предоставлять возможность связывания с осями 2 транспортного средства и рельсовыми транспортными средствами 16, в устройстве может быть предусмотрено кодирование. Оно может быть уникальным и неизменяемым.
Мобильное устройство 12 может быть выполнено с возможностью считывания устройства 3, 3A, как только оно будет находиться рядом с устройством 3, 3A, для выполнения считывания. Для этого датчик 251 считывания (см. фиг.3) может возбуждаться посредством магнита, и, вслед за тем, устройство, которое должно считываться, может быть приведено в действие.
Блок 13 телематики может быть выполнен с возможностью проверки положения и, например, скорости, или также направления движения рельсового транспортного средства посредством GPS. Это может осуществляться время от времени для выполнения проверки достоверности над данными, выданными устройствами 3, 3A. В частности, для того чтобы сопоставлять сигналы скорости, переданные датчиками с текущей скоростью GPS. В дополнение, в случае отклонения от номинала (например, сообщения: блокировка колеса с устройства) также может проверяться, не движется ли рельсовое транспортное средство на самом деле. В дополнение, оно может при необходимости подвергаться определению местоположения. Блок 13 телематики преимущественно также может иметь датчик вибраций, который предусматривает, что блок 13 телематики приводится в действие, только если рельсовое транспортное средство движется. Автономное время работы блока телематики преимущественно имеет значение вплоть до 6 или 7 лет.
С устройством 3 или 3A согласно настоящему изобретению обнаружение движения вращения и диагностика шасси возможны посредством компактного, составляющего одно целое и автономного блока, который может просто модернизироваться.
Блок 13 телематики может запрашивать устройства 3, 3A с постоянными интервалами вместо ожидания передач устройств. В еще одной преимущественной конфигурации каждое из блока 13 телематики и устройств 3, 3A может иметь часы реального времени и с помощью них осуществлять синхронизацию. В таком случае определенные моменты времени могут быть предусмотрены для передачи. Что касается случая отклонения от номинала (блокировки, схода с рельсов), передачи вне определенных временных интервалов также могут быть предусмотрены, например, после одновременного ответа датчиков 252 вибрации в устройствах и в блоке 13 телематики после предыдущего промежутка времени стоянки.
Фиг.12 показывает упрощенное представление сечения варианта осуществления устройства согласно изобретению. Представлено колесо 1, например, рельсового транспортного средства (не показано). Ось или вал транспортного средства оси 2 транспортного средства (впоследствии часто для упрощения указываемый просто как вал) прикреплены к колесу 1, которое выступает в плоскость изображения, из условия, чтобы была проиллюстрирована только его площадь поперечного сечения. Типично, вал 2 может соединять два подобных колеса 1 рельсового транспортного средства. На валу 2 расположен блок 3, который включает в себя по меньшей мере один датчик движения, который может определять статическое ускорение на по меньшей мере одной оси (направлении). На противоположной стороне блока 3 расположен противовес 4, чтобы избежать дисбаланса. Колесо 1 катится по основанию 5, которое, например может быть рельсом, при движении вперед или назад рельсового транспортного средства. Осевые направления, в которых датчик ускорения может определять ускорение, идентифицированы осью X, Y и Z. Каждые из осей X, Y и Z ортогональны друг другу. В дополнение, направление силы тяготения земли или поля тяготения/ускорения свободного падения представлено стрелкой 1G. Ось X указывает в тангенциальном направлении относительно окружности поперечного сечения вала 2, ось Z указывает в радиальном направлении, обозреваемом от центра вала 2, а ось Y указывает в осевом направлении вала 2, соответственно, из плоскости изображения. В блоке 3 могут быть предусмотрены, кроме датчика ускорения, микропроцессор, память, в частности полупроводниковая память, и модуль радиосвязи для передачи данных. В такой мере частичная или полная предварительная обработка сигналов, определенных датчиком ускорения, может быть осуществлена уже в пределах устройства 3. Вместо модуля радиосвязи также может быть предусмотрен другой интерфейс, через который данные могут беспроводным образом или по проводам считываться из блока 3. Направление вращения оси или вала транспортного средства указано вместе с угловой скоростью ω. Подобным образом, показан угол поворота α относительно ускорения свободного падения. Угол поворота α вала 2 может фиксироваться датчиком движения. В конкретном применении, соответственно, могут фиксироваться скорость, угол поворота и/или наклон вала 2, возможно встречающиеся неровности на вращающейся сборке, неровности на основании и сотрясения другими объектами. На основании сигналов датчиков, в таком случае, пройденное расстояние (пробег в милях), остановка, блокировка колес, скорость, аномальные рабочие состояния (износ, сход с рельсов), повреждения пути, сотрясения маневрирования и продолжительность работы, температуры, положения, состояния транспортных средств, рабочие состояния и т.д. могут определяться среди прочего. Среди прочего, датчик ускорения измеряет ускорение свободного падения, действующее на ось и на датчик. Ось или вал 2, вращающийся в поле тяготения земли, поскольку он не находится под углом 90° к поверхности земли, вырабатывает периодический сигнал датчика оси X и Z в зависимости от изменяющегося угла поворота вала 2. Частота сигнала соответствует частоте вращения оси. В центре настоящего изобретения находится оценка временной траектории сигналов датчиков для определения пробега в милях или скорости передвижения и обнаружение специфических возмущений посредством автоматической оценки.
Фиг.13 показывает дополнительно упрощенное представление варианта осуществления согласно фиг.12. Представлены колеса 1 и вал 2 рельсового транспортного средства, на которых расположено устройство согласно варианту осуществления изобретения. В частности, может быть виден блок 3, который, как пояснено выше, также может включать в себя дополнительные электронные компоненты для предварительной обработки и передачи данных, кроме датчика ускорения. На основании этих фигур еще раз показано положение осевых осей, по которым датчик ускорения может определять ускорение. Ось Y указывает в осевом направлении вала 2. Она предоставляет возможность определения наклона вала 2 относительно горизонтали. Ось X проходит в радиальном направлении вала, соответственно в или противоположно направлению вращения вала. Ось Z тянется в радиальном направлении. Углом наклона является γ.Таким образом, блок оценки согласно изобретению может быть настроен, чтобы также определять наклон рельсового транспортного средства.
Фиг.14-20 показывают сигналы SX и SZ датчиков для осевых направлений X и Z, когда они появляются в устройстве 3 согласно аспектам изобретения и могут пересылаться в блок оценки или микроконтроллер. На основании входных сигналов блок 23 оценки или, иначе, блоки 13, 14 или 15 согласно фиг.11 могут выдавать определенные выходные сигналы или результаты измерений. Для этого блок 23 оценки или, иначе, блоки 13, 14 или 15 настроены для оценки временной траектории сигналов SX, SZ датчиков (или, иначе, третьего сигнала SY вдоль третьей оси, что касается наклона оси транспортного средства, вала 2) и для расчета пробега в милях и/или скорости по ним и, при необходимости, обнаружения сигналов отклонения от номинала.
Фиг.14 показывает схему сечения с примерными временными траекториями двух сигналов SX, SZ датчика ускорения устройства 3 (как описано ранее) с непрерывным движением вперед транспортного средства. Представлена временная траектория или траектория, имеющая отношение к углу поворота ω, выходных сигналов SX, SZ датчика ускорения, который может быть присоединен к оси 2 транспортного средства рельсового транспортного средства согласно изобретению. Фиг.14 относится к непрерывному движению вперед и воспроизводит выходные сигналы SX, SZ, связанные с осью X (SX) и осью Z (SZ). Они являются периодическими синусоидальными сигналами, подвергнутыми наложению незначительных возмущений. Сигнал SZ, соответствующий оси Z, имеет смещение, зависящее от скорости, относительно сигнала SX, связанного с осью X, здесь, примерно около 0,5 g (g - ускорение свободного падения). Направление движения вращения может извлекаться из фазового сдвига сигнала SX, связанного с осью X, относительно сигнала SZ, связанного с осью Z. В настоящем случае представлено движение вперед.
Фиг.15 показывает сигналы согласно фиг.14, при этом фиг.15 теперь относится к заднему ходу. Соответственно, сигнал SZ, связанный с осью Z, опережает сигнал SX оси X. Однако при одинаковой скорости рельсового транспортного средства, период или частота сигналов остаются постоянными. Поэтому, по максимумам сигналов при электронной оценке может определяться скорость, а по временным полным траекториям сигналов (или даже только одного из сигналов) - завершенный пробег в милях.
Фиг.16 вновь показывает представление, соответствующее фиг.14, при этом присутствует повреждение у вращающейся части, так что пики пропорционально появляются в обоих сигналах SX, SZ на периодических интервалах. Такие пики (выбросы или тому подобное) могут определяться в пределах объема оценки, которая настроена для идентификации этого возмущения. Периодичность дает указание, что присутствуют повреждения в отношении вращающейся части, например плоских поверхностей, или дефекты в подшипниках или беговых поверхностях. В дополнение, точное положение повреждения может логически выводиться из сигналов SX, SZ датчика. Блок оценки (например, блок 23 или, иначе, один из блоков 12, 13, 14 или 15) может быть настроен для получения специфического положения повреждения на колесе по сигналам SX, SZ датчика. По векторной равнодействующей значений SX и SZ ускорения, в частности, может быть определено направление сотрясений или значения ускорения. Поэтому, посредством устройства согласно изобретению, также может быть проведено различие между вертикальным и горизонтальным сотрясениями. Учитывая направление получающихся в результате значений ускорения, разный тип сигнала или отклонения от номинала (повреждения подшипников, сотрясения маневрирования, нагрузка и т.д.) могут различаться, как дополнительно пояснено ниже.
Фиг.17 вновь показывает сигналы SX, SZ согласно фиг.14, при этом теперь присутствует повреждение у основания, например на рельсе. Здесь, значения ускорения (выбросы, всплески и т.д.) пропорционально появляются поодиночке в вертикальном направлении по обеим осям. Автоматическая оценка, соответственно, может быть настроена из условия, чтобы всплески или выбросы в вертикальном направлении оценивались и выводились в качестве повреждения основания.
Фиг.18 показывает сигналы SX, SZ согласно фиг.14 при сотрясении в продольном направлении, например, при маневрировании. Здесь, значения ускорения (выбросы, всплески и т.д.) пропорционально появляются поодиночке в горизонтальном направлении по обеим осям. Автоматическая оценка, таким образом, может быть настроена из условия, чтобы сигналы идентифицировались в качестве продольного или маневрового сотрясения. В частности, сотрясения выше 2,4 g в горизонтальном направлении могут обнаруживаться и выводиться в качестве отклонения от номинала, при необходимости, с моментом времени.
Фиг.19 относится к случаю, в котором рельсовое транспортное средство двигается от момента времени tx, но колеса заблокированы. Выходные сигналы SX, SZ показывают непериодические значения ускорения (повышенный шум от вибраций) от момента времени tx, без периодического сигнала (то есть о том, что вращается ось), измеряемого одновременно. Возникновение повышенного шума при отсутствии периодического синусоидального сигнала, одновременно зависящего от угла поворота, соответственно, может идентифицироваться в качестве блокировки колес. Оценка, в таком случае, может сохранять эти сигналы, например, с моментом времени возникновения и продолжительностью присутствия.
Фиг.20, в заключение, показывает возможную траекторию сигналов SX, SZ ускорения при сходе с рельсов или долговременной потере контакта между колесом и рельсом. Здесь, определяется непрерывное наложение синусоидального сигнала значениями возмущения на всех осях частично с периодически повторяющейся характеристикой в вертикальном направлении при постоянном расстоянии во времени. Автоматическая идентификация этих сигналов, таким образом, была бы возможной на основании упомянутых признаков и могла бы идентифицироваться в соответственно настроенном блоке оценки. При необходимости мог бы инициироваться аварийный сигнал, или по меньшей мере мог бы фиксироваться момент времени.
Согласно дополнительному аспекту настоящего изобретения, частота вращения оси 2 транспортного средства также может определяться или проверяться на основании центробежной силы, соответственно, ускорения, измеренного в радиальном направлении (оси Z). Эта составляющая является постоянным сигналом, поскольку скорость остается постоянной. В таком случае блок оценки согласно изобретению выполнен так, чтобы он выполнял сопоставление с этим сигналом.
Согласно конкретной конфигурации изобретения, некоторые специфичные простые коды ошибок могут быть связаны с отклонениями от номинала или состояниями. Например, преимущественна следующая кодировка:
Коды могут быть простыми числовыми кодировками состояния отклонения от номинала. Для передачи преамбула со специфичными данными (например, ID) устройства и шифрованными параметрами может быть присоединена спереди. 'NN NN NN NN' - 4-байтная полезная нагрузка. Кроме показания километров или показываемого полезного значения, она также может включать в себя временную отметку часов реального времени. Показанная таблица 1 иллюстрирует некоторые полезные примеры без претензии на полноту. Преимущественно, временная отметка может использоваться для определения последовательности вагонов. Состояния могут относиться к приведению в действие тормоза, которое, например, полагается на оценку сигналов датчика порождаемого конструкцией шума. Подобным образом, сигналы датчика температуры могут определяться для обнаружения горячей буксы. Сотрясения могут определяться датчиками ускорения. Некоторые состояния или отклонения от номинала определяются по комбинациям сигналов датчиков. Например, ускорение или изменение скорости относительно нажатия тормозов, соответственно, порождаемый конструкцией шум. Подобным образом, это может применяться к датчику температуры.
Таким образом, согласно аспектам настоящего изобретения, одно-, двух- или трехосный датчик ускорения прикреплен к оси или валу транспортного средства в транспортном средстве, в частности рельсовом транспортном средстве, который измеряет значения появляющихся ускорений в направлении оси X, Y и Z. Датчик ускорения жестко присоединен к оси и вращается осью вокруг центра оси. Среди прочего, датчик ускорения измеряет ускорение свободного падения, действующее на ось и на датчик. Ось, вращающаяся в поле тяготения земли, вырабатывает, поскольку она не находится под углом 90° к поверхности земли, периодический сигнал датчика оси X и Z в зависимости от изменяющегося угла поворота оси. Частота сигнала соответствует частоте вращения оси. Одновременно, может детектироваться по меньшей мере один сигнал отклонения от номинала. Эти сигналы могут иметь отношение к оси транспортного средства в рельсовом транспортном средстве.
Фиг.21 иллюстрирует вариант осуществления изобретения относительно состава поезда и последовательности вагонов.
Здесь, рельсовое транспортное средство является поездом с N вагонами. Первый вагон W1 может быть локомотивом или простым вагоном, как представлено здесь. Поезд с вагонами W1, W2, W3, W4, ..., WN-1, WN-1, WN начинает двигаться влево в момент времени 0. Вагон W1 начинает двигаться в момент времени TS1 (временной метки TS1). Вагон W2 начинает движение только в момент времени TS2, так как соединение с некоторым люфтом или пружинистостью предусмотрено между W2 и W1. Таким образом, вызывается задержка ΔT=TS2-TS1 между моментами времени отправки вагонов. Третий вагон W3 отходит соответственно только в момент времени TS3, четвертый вагон W4 в момент времени TS4, N-2-ой вагон WN-2 только в момент времени TSN-2, N-1-ый вагон WN-1 в момент времени TSN-1 и последний вагон WN в момент времени TSN. Временные задержки между соответственно соседними вагонами не имеют равной длительности в парах. Тем не менее, всегда применяется условие TSi Детектирование движения осуществляется с применением устройства 3, прикрепленного к валу 2 вагонов с W1 по WN, описанным ранее образом. Вагоны с W1 по WN могут иметь устройство 3 на каждом валу 2 своих осей транспортного средства или только на одном валу 2. Это указано нумерацией от 1 до N на колесах. Преимущественно, устройство 3 может иметь датчик вращения или движения согласно вышеприведенным аспектам и вариантам осуществления, в частности датчик ускорения. Согласно этому аспекту изобретения, обычно может использоваться следующее соотношение: POSX=F(TSX), в котором POSX - относительное положение рельсового транспортного средства (то есть вагона в пределах поезда), а TSX - относительное или абсолютное время отправления рельсового транспортного средства (то есть вагона X в пределах поезда). Преимущественно, идентификационная характеристика IDX вагона X входит в функцию, в силу чего следствием является следующее соотношение: POSX=F(TSX, IDX). Этот ID может храниться в устройстве 3. В варианте осуществления он может быть идентификационным номером IDWX вала, который может быть выражен, как изложено ниже: POSX=F(TSX, IDWX). Тем самым, этот ID также может использоваться для идентификации вагона. В таком случае он может быть уникальным и только один раз назначенным номером, который связан с одиночным валом. В еще одном варианте осуществления вагонам могут назначаться идентификационные номера IDX, которые затем также сохраняются в устройстве на валу. Преимущественно, оно может быть постоянным запоминающим устройством, которое хранит номер. Значения IDX или, иначе, IDWX преимущественно могут быть защищены от недопустимого последующего манипулирования. Согласно аспекту изобретения, устройства 3 на валах с 1 по N вагонов с W1 по WN также могут поддерживать связь друг с другом или по меньшей мере передавать данные с одного устройства на следующее. Предпочтительно, это может происходить по той причине, что устройства 3 выполнены с возможностью создания эпизодической сети. Эта сеть может самопроизвольно конфигурировать саму себя при составлении рельсовых транспортных средств, в частности, поездов с множеством вагонов. Преимущественно, она может передавать данные с устройства 3 на валу вагона на соседнее или по меньшей мере пространственно ближайшее устройство 3 на валу другого вагона. Тем самым, могут перекрываться большие расстояния, которые могли бы преодолеваться только увеличением мощности передачи отдельного устройства. В силу этого может сберегаться мощность. Для этого устройство 3 может предусматривать требуемые протоколы для аутентификации и авторизации в пределах нестационарной сети. Кроме того, устройство преимущественно настроено, чтобы, к тому же, выдавать параметры, дополнительно требуемые для рельсовых транспортных средств, в дополнение к традиционным характеристикам сети. Для этого, например, в устройство могут вводиться данные, которые определяют членство в отношении поезда. Также могут вводиться параметры, которые относятся к вагону поезда. Они также могут быть привязаны к одному или более из ID вагона или валов вагонов и храниться постоянно. Устройство 3 может иметь уникальный единственный ID, который привязан к валу 2 рельсового транспортного средства. Тем самым, характеристики вала 2 могут контролироваться, и, в качестве основы, могут предприниматься проверки. Манипулирование возможно, только если устройство снято, что, в свою очередь, может предотвращаться опломбированием на валу оси транспортного средства, как описано выше. Обмен данными может осуществляться беспроводным способом с разными дополнительными устройствами 14, как уже описано выше со ссылкой на фиг.11. Они могут быть предусмотрены в качестве блока 14 телематики или, иначе, блоков 14 телематики в каждом вагоне, либо вне поезда в качестве ручных устройств 12 или, иначе, стационарных устройств 12. Устройства 12, 14, в таком случае, могут перенимать оценку сигналов или принимать полные данные из устройств 3. Устройства 3, 12, 14 могут объединяться в единое целое в инфраструктуре, как было описано со ссылкой на фиг.11. В частности, информация о последовательности вагонов, в таком случае, также может преимущественно использоваться в пределах инфраструктуры. Согласно дополнительному варианту осуществления изобретения, устройство 3 дополнительно выполнено с возможностью определения частоты свободных колебаний вала 2. В частности, оно может включать в себя датчики порождаемого конструкцией шума или другие акустические датчики для детектирования сдвига частоты свободных колебаний вала 2. В материалах настоящей заявки, предпочтительно, возбуждение вала 2, вызванное работой, применяется для определения сдвига частоты свободных колебаний. В частности, устройство 3 может быть выполнено с возможностью анализа сдвига частоты свободных колебаний в отношении возможных ошибок или опасностей. Здесь, устройство 3 может включать в себя блок оценки, обнаруживающий дефектный вал 2, в частности образование трещин вала 2, на основании сдвига частоты собственных колебаний. В частности, такое выявление дефектов может осуществляться на каждом валу рельсового транспортного средства. Оценка может передаваться через блоки телематики и радиосвязи или сохраняться в пределах устройства. Соответственно, аварийные сигналы могут инициироваться при превышении пороговых значений. Устройство 3 согласно изобретению дополнительно может быть выполнено с возможностью выполнения анализа повреждений посредством оценки модуляции собственной частоты вала 2 частотой вращения вала 2. Преимущественно, отдельное возбуждение колебаний не требуется. Взамен оценка осуществляется при текущей работе. Возбуждение, в таком случае, например, выполняется выпуклостями на беговой поверхности и/или рельсах. Более того, возбуждения могут наводиться при загрузке и выгрузке, при маневрировании, прохождении через выпуклости и/или стрелки, и они могут автоматически анализироваться на сдвиг собственной частоты в пределах устройства 3 согласно изобретению. Если устройство 3 имеет датчики ускорения или микрофоны порождаемого конструкцией шума, они могут быть выполнены с возможностью записи таких собственных колебаний. Анализ колебаний может выполняться непосредственно в устройстве 3, при этом там может детектироваться сдвиг собственной частоты. Отклонение от установки собственной частоты может сообщаться в центр через радиосвязь или сохраняться в пределах устройства с указанием идентификации устройства 3 или вала 2, либо колесной пары вагона. Стало очевидным, что повреждения, например, возникающие на валу 2, могут изменять спектр собственной частоты вала 2. Тем самым, посредством сравнения с заданным спектром он может быть предостережен о наступающих дальнейших повреждениях и опасностях, проистекающих из них. Более того, вал 2 в целом подвергается изгибному напряжению. В частности, оно возникает при смещенных точках приложения нагрузки, которая должна поддерживаться валом 2, но также под собственным весом самого вала 2. Стало очевидным, что изгибное напряжение вала 2 может изменять собственную частоту вала 2. В устройстве 3 согласно этому варианту осуществления изобретения этот эффект, например, может использоваться для определения веса фактической нагрузки рельсового транспортного средства или грузового вагона. Чем больше вес полезной нагрузки, тем больше изгибное напряжение на валу 2 и, соответственно, сдвиг собственной частоты вала. Это, в частности, применяется к неповрежденному валу. С дефектным валом (например, с образованием трещин) изменение спектра собственных частот может определяться, кроме сдвига собственной частоты. Таким образом, например, с вращающимся валом 2, спектр собственных частот вала 2 модулируется частотой вращения вала 2. Устройство 3 согласно этому варианту осуществления, в частности, преимущественно может быть выполнено с возможностью выявления этой модуляции спектра собственных частот и применения ее для определения дефекта на валу (например, образования трещин).
Реферат
Изобретение относится к области контроля тормозных систем транспортных средств. При испытании рельсового транспортного средства, определяют последовательность вагонов рельсового транспортного средства. Определяют движение транспортного средства в определенный момент времени. Определяют полноту состава рельсового транспортного средства путем сравнения фактически определенной последовательности с последовательностью состава, служащей в качестве эталона. Модернизируют рельсовое транспортное средство при помощи датчика. 8 н. и 9 з.п. ф-лы, 21 ил., 1 табл.
Формула
датчик ускорения, пригодный для определения статического ускорения вдоль, по меньшей мере, первой оси, при этом
датчик ускорения размещен на детали, вращающейся пропорционально скорости транспортного средства в ответ на движение перемещения транспортного средства, из условия, чтобы датчик ускорения двигался так, чтобы соотношение ускорения свободного падения, измеренного датчиком ускорения, изменялось вследствие углового отклонения первой оси по отношению к полю тяготения земли; и
блок оценки, который установлен для приема выходного сигнала датчика ускорения, который представляет измеренное ускорение, и для определения пробега в милях и, по меньшей мере, одного состояния отклонения от номинала рельсового транспортного средства на основании этого выходного сигнала.
Комментарии