Устройство для регулирования геометрической формы строчки на швейной машине - SU1390271A1
Код документа: SU1390271A1
Чертежи


Описание
Изобретение относится к автомати - ческой пошивке и соединению текстиль ных материалов, высокополимеризован - ных веществ и кожи.
Известны технические решения, поз воляющие производить автоматическую пошивку, которые реализ лот задачу подвода соединяемых пошивочных изделий в соответствии с требуемой гео метрической кривой под место соеди ™ нения,
Соединяемые пошивочные изделия могут укрепляться в рамке между - упор° ными (или подобныг-ш) элементами, причем упорный элемент перемещается под местом соединения по принципу автоматического цифрового управления кривой,
Так 5 известна швейная машина с
цифровым автоматическим управлением, производящая строчку в соответствии
с швейным шаблоном Причем используется только один нарисованный шаблон ддя получения цифровой информации для управхюния формой строчки задан
копируго01его устройства (заявка ФРГ № 2629677, кл. D 05 В 21/00, 1977)., Известны также другие прис.пособ%- лениЯр в которых используют лелггоч - ные и другие носители информации (за5;вк ФРГ М 23 1 3222, кл, 52О 6 1/20 , 1 973 | патент ГДР № 1 26881 кл. D 05 В 21 /00, 1977; патент США № 3986466. кл. 1 12-121-12,, 1976; заявка ФРГ К 2826084, кл D 05 В 21/00, 1979; патент COIA № 3613610, кл. 112-262, 1971). Патент ГДР № 124393,, кл„ D 05 В 3/00, 1977,,
Известно приспособлений р лрини-- мающее швейное изделие н заг имное устройство, фотоэлектрррхескн копи рующее предварительно сшиваемый край пошивочного изделия в закрепленном положении и управляющее таким обра-- зом декоративной строчкой с равно мерным расстоянием от края (патент ГДР № 124393, кл, D 05 В 3/00, 1977)
Соединяемые пошивочные изделия могут непрерывно или прерь висто за. жиматься местами и с помощью элемен - тов передачи кинематической энергии подводиться под место пришивания (заявка ФРГ № 2253990, кл. 52 а 61/2 1973; № 2522422, кл. D 05 В 35/10, 1980).
Для продвижения пошивочных ЛИЙ и для контрольных устройств из-
0
5
5
0
вестен целый ряд технических решений которые независимо от основного соба работы могут применяться в раз личных областях (заявки ФРГ № 2909664, кл. D 05 В 21/00, 1979; № 2907669, кл. D 05 В 21/00, 1979; № 2840048, кл. D 05 В 21/00, 1979) .
Педостатком является то, что из- вестные приспособления, крепко мающие пошивочные изделия и подводя- eyie их в координатное движение, хотя выполняют качественный шов требуемой формы, однако.требуют больших технических затрат, например стол, пере мешающийся вдоль координат х и у. Кроме того, существенным недостат- ком является прерывистьш швейный процесс, так как пошивочные изделия перед началом пошивки должны зажи- маться в носителе пошивочных изде ЛИЙ, а после окончания пошивки они дохккны выниматься из него.
Использование нескольких носите- лей пошивочных изделий еще больше увеличивает технические затраты. Управление перемещением носителя пошивочных изделий осуществляется либо обычным способом с помощью шаблонов , копируемых механически, пнев- мгтически или фотоэлектрически, либо с помощью программированного управления процессом движения приводящих элементов носителя пошивочных изделий.
Наиболее близким к предлагаемому является устройство для регулирования геометрической формы строчки на швейной машине, содержащее привод поворота сшивае: 1ых деталей, подключенный к выходу регулятора формы строчки, и привод основной подачи, соединенный с одним из выходов блока программного управления, датчики перемещения и угла поворота сщиваемых деталей относительно иглы, связанные с соответствующими входами блока программного управления (патент С1ЧА № 4201144, кл. D 05 В 21/00, 1980).
Указанное и аналогичные устройства , подводящие пошивочные изделия paзличны iи элементами в рабочую зону без использования за:«имного устройства , имеют тот недостаток, что ме.жду приводными элементами механизма подачи и местом соединения в связи с неэластичностью пошивочных из- целий возникают отклонения от требуемой геометрической формы и ухудше-
0
э
0
0
ние качества строчки. Кроме того, эти приспособления имеют ограничен ную область применения относительно геометрической формы строчки. нал машина не может распознавать и исправлять отклонения от требуемой формы строчки.
Цель изобретения повьпчение точ- ности регулирования путем снижения влияния первоначальной ориентации сшиваемых деталей и деформируемости материал-а деталей.
Согласно изобретению автоматически вырабатываемая швейной машиной форма строчки сравнивается с запом ненными данными выработанной предва- рительно вручную строчки- образца.
Швейная машина состоит из извест ного устройства для подачи материа- ла, светоизлучателя и фотоэлектри- ческой головки и соединена с систе- мой отработки информации. Для срав- нения геометрических форм строчек предусмотрен инкрементальный датчик данных измерений для по крайней мере одного дополнительного и отдельно работаюш;его механизма лодачи поши вочного изделия, соединенный с дат чиком данных измерений. Инкременталь ный датчик данных измерений соеди няется посредством системы принятия данных при автоматической пошивке и системы принятия данных при ручной подаче с датчиком данных измерений для нормального механизма подачи по шивочного изделия, счетчиком стежков и датчиком положения иголки, Систе- ма принятия данных для ручной подачи соединена с помощью запоминающего устройства для получения данных измерений с устройством сравнения за- данной и фактической величин. Для распознавания процесса шитья в зоне шитья установлены одна или несколько распознаю1чих головок, принимающие световые сигналы, поступающие по крайней мере от одного светопередат чика. В распознающей головке установ лен считывающий блок, для которого предпочтительно используются ЦЦД элементы строчечной или матричной формы в качестве датчиков изображени на базе твердых тел.
.
Возможно применение распознающей головки с фототранзисторами с или без предвключенного светопроводящего кабеля.
5
- IQ
15 -
20 25 е ь зо в , „ о д в ий
35
50
55
Передатчик света может быть рас- положен как под швейной пластинкой (например, по одному светопередатчику справа и-слева от иглы), так и внут ри светопроводящей щвейной пластинки. Кроме того, передатчиком может слу жить самоизлучающая швейная пластин- ка. Посредством системы принятия дан-- iibix пошивочного изделия распознающая головка может соединяться как с сис темой принятия данных при ручной подаче , так и с устройством сравнения. Устройство сравнения соединяется, в свою-очередь, с дополнительным меха низмом подачи для корректуры шитья посредством регулятора формы строчки. Дополнительный механизм подачи поши- во чного материала представляет собой шаговый двигатель.
Согласно изобретению можно осуществлять снятие технологически требуемой формы строчки в виде цифровых сигналов, их формирование, запоми нание и использование для регулирова- имя образовавшейся формы строчки, а также передачу снятых цифровых сиг налов другиь швейным машинам. Таким образом достигается регулирование формы строчки.
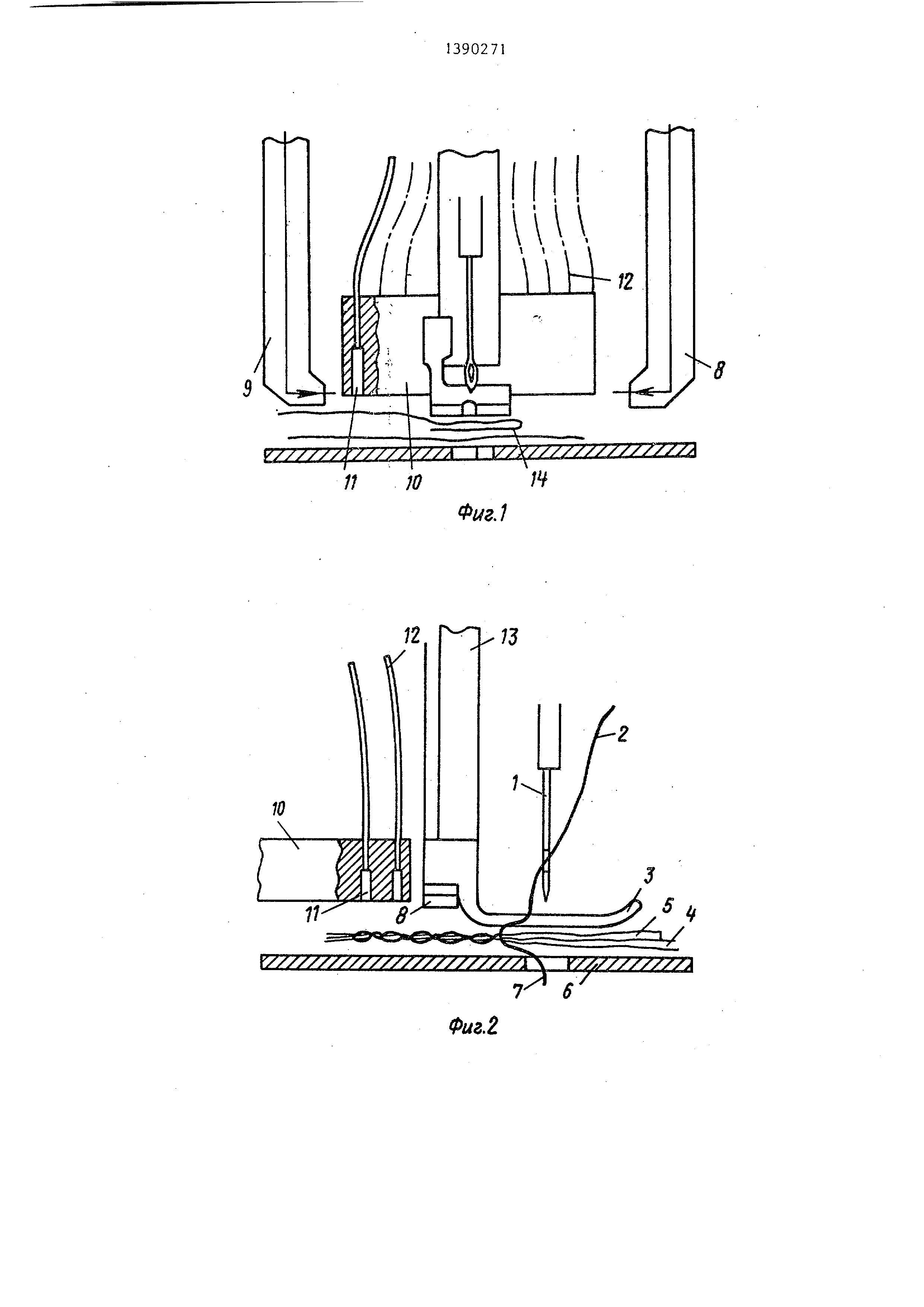
На фиг, 1 изображена схема места пришивания в направлении шитья, общий вид; на фиг.2 - то же, вид сбоку; на . 3 - то же, вид сверху; на фиг. 4 - схема места пришивания по другому варианту, вид сверху; на фиг. 5.- схема места пришивания, вид сверху, с транспортными средствами и пошивочным изделием; на фиг. 6 то же 5 общий вид, с самоизлучающей швейной пластинкой; на фиг. 7 - то же, со светопроводящей швейной плас тинкой.
Устройство для регулирования гео метрической формы строчки на швейной машине содержит (фиг. 1) осветители светопередатчики 8 и 9 справа и слева от иглы, распознаюп ую головку 10 (датчик конфигурации края верх- ней детали) с отверстиями 11, светопроводящие кабели 12 за прижим ной лапкой. Пошивочный материал с краем 14 рядом со строчкой находится над швейной пластинкой.
На фиг. 2 изображены игла 1 с верхней нитью 2, прижимная лапка 3 со стержнем 13, нижний 4 и верхний 5 слои ткани, швейная пластинка .6, нижняя нить 7. правый светопередат
5139
чик 8,, распознающая головка 10 с отверстиями J 1 и светопроводящие ка-- бели 12.
На фиг, 3 показаны игла Ij при- жньтая лапка 3, светопередатчики- 8 и 9 слева и справа от иглы 1 и рас-- познающая головка 10 с отверстия- ми 1 1 .
. На фиг, 4 изображены игла 1, из маненная прижимная лапка 16 с изме ненным стержнем IS, распознающая го- ловка 17 для измененного места шитья распознающая головка 18 перед местом шитья и распознающая головка 19 пос - ле места шитья.
На фиг. 5 изображены зажимная лапка Зэ светопередатчики 8 и 9 спра ва и слева от иглы, распознающая го
ловка 10, пошивочный материал 20 с
началом строчки 20а5 изменение формы строчки 20 и конец строчки 20 Г, механизм 21 подачи (привод основной подачи) и дополнительный механизм 22 подачи материала; привод 24 допол нительного механизма подачи с инкре ментальным датчиком 23 данных изме-- рений, датчиком 25 для дополнитель ного механизма -подачиj образующие датчик угла поворота сшиваемых деталей , датчик 26 дд1Я основного приво- да, являюш,ийся датчиком перемещения сшиваемы х деталей датчик 28,положа ПИЯ иглы, счетчик 27 стежков, коди- рующий преобразователь 29; узлы 30 принятия данных при ручной подаче и 32 при автоматической поижвке, поминающее устройство 31 для данных попшвки (блок nporpaMivffloro управле - ния ), блок 33 сравнения и регулятор 34 формы строчки о
Датчики 25, 26 и 28 и счетчик 27 стежков подключены к соответствующим входам узлов 30 и 32 принятия данных Кодирующий преобразователь 29 подклю чен к соответствующему входу узла 30 принятия данных и первому входу блока 33 сравнения, второй вход которого через запоминающее устройство 3 соединен с выходом узла 30 Выход блока 33 сравнения через регулятор 3 е{)ормы строчки подключен к приводу 24 дополнительного механизма подачи. Привод механизма 21 основной подачи связан с блоком программного управления (не изображено),
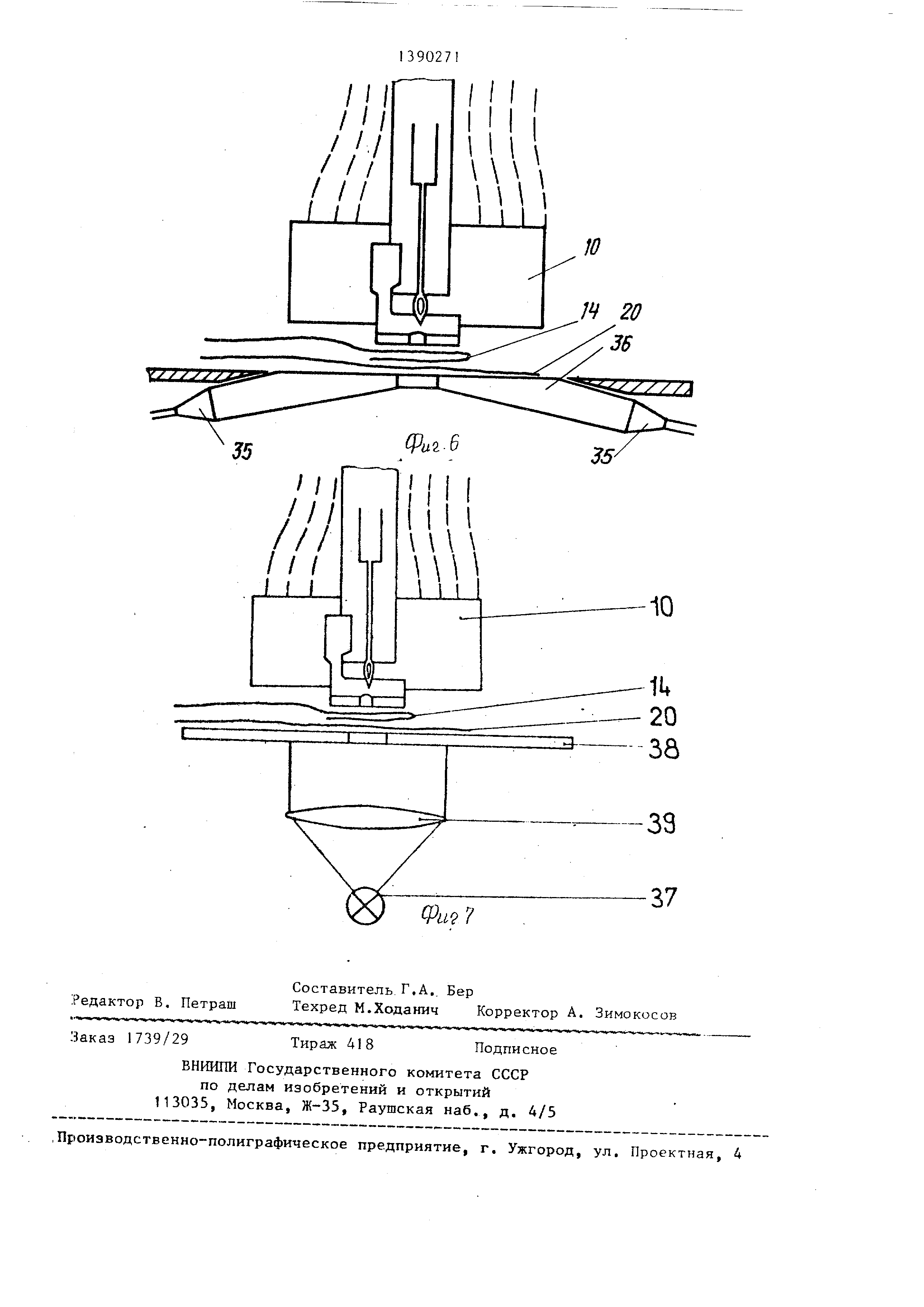
На фиг. 6 показаны распознающая головка 10 за прижимной лапкой, по-- шивочный материал с краем 14 ткани
/,
0
0
5
дс
3.5
0
50
J.J
i6
и самоизлучающая щвейная пластинка 36 с двумя источниками 35 света.
На фиг, 7 изображены-распознающая головка 10, пошивочный материал с краем 14 ткани, светопроницаемая швейная пластинка 38, собирающая линза 39, светопередатчик 37.
Фиг, 13 относится к двойной ба- сонной машине с неизменяемыми рабо чими инструментами.
Устройство работает, следующим об разоМо
В иглу 1 продевается верхняя нить 2. Прижимная лапка 3 прижимает нижний 4 и верхний 5 слои ткани к швейной пластинке 6. Верхняя 2 и нижняя 7 ;нити образуют строчку. Ря- дом со стержнем I3 прижимной лапки установлены справа световой передатчик В и слева световой передатчик 9. Световые передатчики работают таким образом, что в зависимости от положения края 14 ткани верхнего слоя 5 ткани либо справа, либо слева они приводятся в действие. Когда, например , отогнутый слой ткани (фиг. I) расположен слева от иглы, установ - ленный на правой стороне световой передатчик В излучает свет. Этот свет на краю 14 ткани частично отражается наверх, ,так что световые лучи спереди могут падать на установленные в отверстиях 11 головки 10 кабели 12 световых проводов. Чтобы улучшить направляющий эффект световых лучей, кабели 12 световых проводов в распознающей головке 10 установлены так, что их передние стороны помещены в конце отверстия 11 с небольшим диаметром и большой глубиной. Распознающая головка 10 располагается на небольшом расстоянии от поверхности материала, так что не мешает процессу образования строчки.
Согласно фиг. 4 стержень 15 прижимной лапки имеет другое положение, приж-имная лапка 16 изменена, распознающая головка 17 установлена ближе к месту.образования строчки. На месте выгиба пошивочного изделия установлена вторая распознаюо ая головка 18. Когда изготавляются длинные.- строчки с небольшим отклонением от прямой на необходимом расстоянии от второй может устанавливаться третья распознающая головка 19.
Распознающие головки 10 и 17-19 в начале строчки 20 а опускаются
вниз и находятся на небольшом рас стоянии от пошивочного изделия 20, а в конце швейного процесса 20с ав томатически поднимаются вверх.
Согласно фиг. 5 швейная машина переключается для снятия образца формы строчки в рабочее положение Запись программы к узлу 30 приня- тин данных при ручном режиме рабо ты. Пошивочное изделие 20 направля ется вручную, причем пошивка продо жается до момента 20 d Головка 10 после каждого стежка определяет форму строчки и через устройство 29 распознавания, представляющее собой измерительный преобразовател передает соответствующую величину измерения в запоминающее устрой- ство 31 .
При движении иглы синхронно такж приводится в движение механизм 21 подачи ткани. Количество стежков, число оборотов механизма 21 и поло жение иглы через счетчик 27 стежков датчик 26 данных измерений для ос новного привода и датчик 28 положе - ния иглы передаются в запоминающее устройство 31. Направляемое вручную пошивочное изделие 20 приводит в действие механизм 22 подачи, почтительно выполненный в виде пары зажимных валов, и инкрементальный датчик 23 данных измерений. Полу чанные данные через датчик 25 данны измерений для дополнительного привода передаются в запоминающее устрой ство 31. В момент 20 6 игла 1 остается в пошивочном изделии 20, швей- ный процесс прерывается, основной привод выводится из строя и швейное изделие 20 вручную поворачивается вокруг иглы 1J причем прижимная лап- ка 3 поднимается. При этом через подающий механизм дальнейшие данные поступают в запоминающее устройство 31. Край пошивочного изделия с готовой строчкой за иглой 1 пово
рачивается влево, так что световые лучи могут падать на отдаленные от- верстия 11 в головке 10. Если в швейном процессе до момента 20 В только 7-и и 8-и ряды воспринимают свет, то в конце поворота пошивочного изделия в данном случае отверстия Ul...u8, в2..,ё8, с2.,.с8ит.д. также, воспринимают световые сигналы. Это изменение регистрируется в за-
5
. ю j , 20
25 on Q ,
35
45
50
55
поминающем устройстве 31. По мере продолжения швейного процесса с каждым стежком происходят изменения восприятия световых сигналов, которые также запоминаются.
После окончания швейного процесса машина переключается на режим автоматической пошивки. Далее происходит автоматическая пошивка аналогичных пошивочных материалов согласно запомненной программе. С помощью известного устройства подачи пошивочного материала устанавливается стартовое состояние изделия 20. Начинается процесс образования строчки. Головка 10 определяет отклонение от формы строчки для блока 33 сравнения, к которому также поступает постоянная информация из запоминаюп его устройства 31 .
Разность между постоянной и истинной величинами усиливается в регуляторе 34 фор(ы строчки и используется как величина регулирования для изменения числа оборотов пары зажимных валов 22, которая может приводиться в движение, например, шаговым двигателем 24. После соответствующего чис ла стежков пошивочное изделие 20 поворачивается с места 20 в дополнительным приводящим механизмом 22.
При этом из работы выводится основной привод 21, игла находится в самом низком положении и служит точкой поворота пошивочного материала 20 и шаговый двигатель вращается до тех пор, пока блок 33 сравнения не реализует минимальное отклонение регулируемой величины от требуемой заданной величины.
Швейный процесс продолжается, пока полностью не отработает запомненная программа.
Находящиеся вьш1е пошивочного материала 20 светопередатчики 8 и 9 располагаются слева и справа от иглы 1 так, что они излучают лучи параллельно поверхности материала по возможности в инфракрасном или ультрафиолетовом диапазоне. Эти лучи света отражаются либо на строчку, либо на параллельно с ней расположенный край пошивочного изделия и воспринимаются распознающей головкой 10. Другая возможность распознавания края материала состоит в том, что при попадании наклонного луча тень
, 913
края материала, лежащего выше, попа- дает на лежащую ниже часть шитья, в результате чего распознается строч ка, проходящая параллельно краю ма териала.
Согласно фиг. 6 в качестве свето- передатчика применяется самоизлучаго- щая швейная пластинка 36. Слева и справа от нее расположено по одному Источнику света, которые излучают Лучи света на швейную пластинку 36 Ьод наклоном снизу и тем caSaiM зас- Тавляют ее светиться. Одна часть лучей проходит через лежащий на швей ной пластинке 36 и пропускающий свет материал 20 и регистрируется распоз Нающей головкой 10. На краю 14 материала образуется граница света И тени, которая и служит адекватной геометрической кривой для образова Иия строчки.
; Если светопередатчик 37 находится Ьод швейной пластинкой 38, то последняя должна пропускать свет ХФИГ.7), Лучи света делаются параллельными с помощью собирающей линзы 39, расположенной между светопере- датчиком 37 и щвейной пластинкой 38.
Часть лучей проходит через пропускающий свет пощивочный материал 20 и регистрируется (аналогично фиг. 6) распознающей головкой.
Задача съемочного блока распознающей головки 10 состоит в обработке сигналов во временной последовательности . Для этого колебания яркости изображаются на медиуме, так что на нем происходит перераспределение зарядов. При регистрации такого распределения зарядов по внещней .электрической цепи протекают соответствующие токи, временное изменение котсфых описывает изменение щвейных параметров. Эти аналоговые величины замеряются и обрабатываются известным способом с помощью аналогово- цифрового преобразователя, адаптера микро-ЭВМ и периферийных устройств. Между отдельными составными частями этой системы передаются как информационные сигналы, так и сигналы - управления. Они служат для замера
0
5
27
5
0
5
0
5
0
110
и оценки швейньпс параметров, проведения теста на смысл замеренных величин , определения отклонения от накопленных данных, оценки и выдачи оцененных величин, управления швейным процессом с помощью приводящего механизма, например двигателя, и, когда это требуется, для выдачи информации о швейном процессе на дисплее .
Формула изоб-ретения
. Устройство для регулирования геометрической формы строчки на швей ной машине, содержащее„привод поворота сшиваемых деталей, подключенный к выходу р&гулятора формы строчки , и привод основной подачи, соединенный с одним из выходов блока программного управления, датчики перемещения и угла поворота сшиваемых деталей относительно иглы, связанные с соответствующими входами блока программного управления, отличающееся тем, что, с целью повы1чения точности регулирования путем снижения влияния первоначальной ориентации сшиваемых деталей и дефор - мируемости материала деталей, оно снабжено фотоэлектрическими датчиками конфигурации края верхней детали, кодирующим преобразователем и блоком сравнения, причем Лотоэлектрический датчик конфигурации края верхней детали подключен через кодирующий преобразователь к первому входу блока сравнения, соединенного вторым входом с выходом формы строчки блока программного управления, при этом выход блока сравнения подключен к входу регулятора формы строчки.
2. Устройство по п.1, о т л и - чающееся тем, что фотоэлектрический датчик конфигурации края верхней детали содержит неподвижно закрепленные над поверхностью стола швейной машины осветители и матричный или строчной набор светоприемни- ков, размещенных в зоне траектории движения края верхней сшиваемой детали .
/7 Ю/V
ФигЛ




Реферат
Изобретение относится к автоматической пошивке и/или соединению текстильных материалов, высокополи меризованных веществ и кожи. Целью изобретения является повышение точ- ности регулирования путем снижения влияния первоначальной ориентации сшиваемых деталей и деформируемости материала деталей. №ейному процессу придается вид регулировочного про- цесса. Причем отклонение автомати чески вырабатываемой формы строчки от предварительно сделанной вручную служит величиной регулирования для средств продвижения пошивочных изде- ЛИЙ. Для этого в области пришивания устанавливаются одна или несколько головок распознавания и световые передатчики , связанные с системой обработки информации. Первая образовавшаяся строчка превращается в цифровой код и запоминается вместе с другой информацией о строчке, а образовавшаяся при автоматической по-. шивке форма строчки сравнивается с запомненными данными. Отклонения от требуемой формы строчки немедленно автоматически исправляются. 1 з.п. , 7 ил. i (Л
Формула
Комментарии