Гибридное транспортное средство - RU2657631C1
Код документа: RU2657631C1
Чертежи






Описание
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к гибридному транспортному средству, и, более конкретно, к гибридному транспортному средству, которое оснащено двигателем внутреннего сгорания, а также электрический двигатель хода транспортного средства.
2. Описание предшествующего уровня техники
[0002] Транспортные средства, которые оснащены двигателем внутреннего сгорания, обычно включают в себя катализатор, который очищает выхлопные газы из двигателя внутреннего сгорания в выхлопном канале. Когда катализатор не достигает температуры своей активации, катализатор не может достаточно очистить выхлопной газ. Именно по этой причине были предложены катализаторы с электроподогревом (которые могут именоваться также как «КЭП»), выполненные с возможностью нагревать катализатор электрически, чтобы прогревать его до запуска двигателя внутреннего сгорания.
[0003] В публикации японской патентной заявки №8-61048 (JP 8-61048 А) описан контроллер для такого КЭП. Контроллер определяет рабочие условия КЭП на основе, например, напряжения катализатора, подаваемого на КЭП, тока катализатора, текущего через КЭП, и температуры катализатора, рассчитываемой на основе напряжения катализатора и тока катализатора, и может определить неисправность КЭП на основе результатов определения (см. JP 8-61048 А).
[0004] Когда датчик тока, который определяет ток, который подается на КЭП (который может именоваться также «датчик тока КЭП»), имеет неисправность, электроэнергия, которая подается на КЭП, может быть определена неправильно, и могут возникнуть следующие проблемы. Например, когда датчик тока КЭП указывает на значение, которое выше фактического значения тока, то подача электроэнергии на КЭП может быть недостаточной. Тогда показатель очистки выхлопных газов КЭП может быть снижен, так как КЭП может быть недостаточно прогрет. С другой стороны, когда датчик тока КЭП указывает на значение, которое ниже фактического значения тока, подача электроэнергии на КЭП может быть избыточной. Тогда в КЭП могут образоваться локальные перегретые области, и в результате тепловое напряжение может вызвать трещины в базовом материале КЭП.
[0005] Поэтому необходимо проверять исправность датчика тока КЭП. Тем не менее, создание избыточного датчика тока КЭП для обнаружения возможной неисправности датчика тока КЭП приводит к такой проблеме, такой как увеличение стоимости или размеров оборудования, что может снизить коммерческую привлекательность транспортного средства. Такие проблемы конкретно не выделены в JP 8-61048 А.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Поэтому задачей изобретения является создание гибридного транспортного средства, в котором неисправность датчика тока КЭП может определяться, без избыточного датчика тока КЭП.
[0007] Гибридное транспортное средство согласно одному объекту изобретения представляет собой гибридное транспортное средство, которое оснащено двигателем внутреннего сгорания и электродвигателем, генерирующим движущую силу, и дополнительно включает в себя устройство накапливания электроэнергии, каталитическое устройство с электроподогревом, первый и второй датчики тока, и контроллер. Устройство накапливания электроэнергии накапливает электроэнергию, которая подается на электродвигатель. Каталитическое устройство с электроподогревом включает в себя катализатор, который очищает выхлопные газы от двигателя внутреннего сгорания, и выполнен с возможностью подачи электроэнергии от устройства накапливания электроэнергии для электрического подогрева катализатора. Первый датчик тока (датчик тока КЭП) определяет ток, который подается на каталитическое устройство с электроподогревом. Второй датчик тока определяет входной/выходной ток устройства накапливания электроэнергии. Контроллер выполняет управление определением неисправности, которое оценивает ток, подаваемый на каталитическое устройство с электроподогревом, с использованием величины определения второго датчика тока, и сравнивает оцениваемый ток с величиной определения первого датчика тока для определения того, имеется ли неисправность в первом датчике тока.
[0008] В этом гибридном транспортном средстве, ток, подаваемый на каталитическое устройство с электроподогревом, оценивается с использованием величины определения второго датчика тока, который определяет входной/выходной ток устройства накапливания электроэнергии, и оцениваемый ток сравнивается с величиной определения первого датчика тока (датчика тока КЭП) для определения неисправности первого датчика тока. Таким образом, нет необходимости делать первый датчик тока избыточным для определения, имеет ли неисправность в первом датчике тока. В соответствии с этим гибридным транспортным средством, неисправность первого датчика тока может определяться без избыточного первого датчика тока.
[0009] Гибридное транспортное средство согласно объекту изобретения может представлять собой гибридное транспортное средство, которое оснащено двигателем внутреннего сгорания и электродвигателем, генерирующим движущую силу, и дополнительно включает в себя устройство накапливания электроэнергии, инвертор, преобразователь, каталитическое устройство с электроподогревом, первый и второй датчики тока, и контроллер. Устройство накапливания электроэнергии накапливает электроэнергию, которая подается на электродвигатель. Инвертор приводит в действие электродвигатель. Преобразователь расположен между устройством накапливания электроэнергии и инвертором. Каталитическое устройство с электроподогревом включает в себя катализатор, который очищает выхлопные газы из двигателя внутреннего сгорания, и выполнен с возможностью снабжения электроэнергией из линии электропитания, которая соединяет преобразователь и инвертор для электрического подогрева катализатора. Первый датчик тока (датчик тока КЭП) определяет ток, который подается на каталитическое устройство с электроподогревом. Второй датчик тока определяет ток, который подается из устройства накапливания электроэнергии на преобразователь. Контроллер выполняет управление определением неисправности, которое оценивает ток, подаваемый на каталитическое устройство с электроподогревом с использованием величины определения второго датчика тока, и сравнивает оцениваемый ток с величиной определения первого датчика тока для определения того, имеется ли неисправность в первом датчике тока.
[0010] В этом гибридном транспортном средстве, ток, который подается на каталитическое устройство с электроподогревом, оценивается с использованием величины определения второго датчика тока, который определяет ток, подаваемый из устройства накапливания электроэнергии на преобразователь, и оцениваемый ток сравнивается с величиной определения первого датчика тока (датчика тока КЭП) для определения того, имеется ли неисправность в первом датчике тока. Таким образом, нет необходимости делать первый датчик тока избыточным для определения того, имеется ли неисправность в первом датчике тока. В соответствии с этим, гибридное транспортное средство может определять неисправность первого датчика тока без создания первого избыточного датчика тока.
[0011] Гибридное транспортное средство может работать или в режиме РЗ (расходования заряда), или режиме ПЗ (поддержания заряда). Управление определением неисправности может включать в себя первый процессинг, который выполняется, (i) когда гибридное транспортное средство находится в режиме РЗ, и когда устройство накапливания электроэнергии имеет состояние заряда (СЗ), которое ниже заданного уровня, а катализатор каталитического устройства с электроподогревом имеет температуру, которая ниже заданной величины, или (ii) когда гибридное транспортное средство находится в режиме ПЗ, и когда катализатор имеет температуру, которая ниже заданной величины, и двигатель внутреннего сгорания не работает. При первом процессинге, контроллер может управлять электроэнергией, которая подается на каталитическое устройство с электроподогревом, при этом подается первая электроэнергия, которая требуется для определения того, имеется ли неисправность в первом датчике тока и для прогрева каталитического устройства с электроподогревом.
[0012] В режиме РЗ, двигатель внутреннего сгорания управляется так, чтобы работать менее часто, чем в режиме ПЗ, производится переключение на режим ПЗ, и тогда двигатель внутреннего сгорания запускается сразу после того, как СЗ падает ниже заданного уровня. С другой стороны, в режиме ПЗ, двигатель внутреннего сгорания работает должным образом, чтобы поддерживать СЗ в заданном диапазоне. Как описано выше, условия для запуска двигателя внутреннего сгорания между режимом РЗ и режимом ПЗ различаются. Тем не менее, в соответствии с этим гибридным транспортным средством, когда катализатор имеет температуру, которая ниже заданной величины, первая электроэнергия, которая требуется для определения того, имеется ли неисправность в первом датчике тока и для прогрева каталитического устройства с электроподогревом, должна подаваться на каталитическое устройство с электроподогревом независимо от выбранного режима (режима РЗ/режима ПЗ).
[0013] Более предпочтительно, чтобы управление определением неисправности могло дополнительно включать в себя второй процессинг, который выполняется, когда гибридное транспортное средство находится в режиме РЗ, и когда устройство накапливания электроэнергии имеет СЗ, которое равно или выше заданного уровня, либо когда гибридное транспортное средство находится в режиме ПЗ, и когда катализатор имеет температуру, которая равна или выше заданной величины. При втором процессинге, контроллер может управлять электроэнергией, которая подается на каталитическое устройство с электроподогревом, при этом может подаваться вторая электроэнергия, которая меньше первой электроэнергии.
[0014] Когда гибридное транспортное средство находится в режиме РЗ, и СЗ равно или выше заданного уровня, нет необходимости для прогрева каталитического устройства с электроподогревом, поскольку режим РЗ будет продолжаться, и двигатель внутреннего сгорания в настоящем времени вряд ли запустится. В режиме ПЗ, в котором двигатель внутреннего сгорания работает должным образом, нет необходимости для прогрева каталитического устройства с электроподогревом, когда катализатор имеет температуру, которая равна или выше заданной величины. В таком случае, в соответствии с этим гибридным транспортным средством, вторая электроэнергия, которая меньше, чем первая электроэнергия, только для определения того, имеется ли неисправность в первом датчике тока, может подаваться на каталитическое устройство с электроподогревом независимо от выбранного режима (режима РЗ/режима ПЗ).
[0015] Предпочтительно, что гибридное транспортное средство может работать или в режиме РЗ, или в режиме ПЗ. Управление определением неисправности включает в себя первый процессинг, который выполняется, когда гибридное транспортное средство находится в режиме РЗ, и когда устройство накапливания электроэнергии имеет СЗ, которое ниже заданного уровня, а катализатор каталитического устройства с электроподогревом имеет температуру, которая ниже заданной величины, а также второй процессинг, который выполняется, когда гибридное транспортное средство находится в режиме РЗ, и когда устройство накапливания электроэнергии имеет СЗ, которое равно или выше заданного уровня. При первом процессинге, контроллер может управляет электроэнергией, которая подается на каталитическое устройство с электроподогревом, при этом подается первая электроэнергия, которая требуется для определения того, имеется ли неисправность в первом датчике тока и для прогрева каталитического устройства с электроподогревом. При втором процессинге, контроллер может управлять электроэнергией, которая подается на каталитическое устройство с электроподогревом, при этом может подаваться вторая электроэнергия, которая меньше первой электроэнергии.
[0016] Когда гибридное транспортное средство находится в режиме РЗ, и СЗ равно или выше заданного уровня, нет необходимости для прогрева каталитического устройства с электроподогревом, поскольку режим РЗ будет продолжаться, и двигатель внутреннего сгорания и двигатель внутреннего сгорания в настоящем времени вряд ли запустится. Затем производится переключение в режим ПЗ, и двигатель внутреннего сгорания запускается сразу после того, как СЗ падает ниже заданного уровня. В этом гибридном транспортном средстве, необходимость прогрева каталитического устройства с электроподогревом определяется способом, пригодным для режима РЗ, и выполняется первый или второй процессинг, как описано выше. Таким образом, в соответствии с этим гибридным транспортным средством, неисправность первого датчика тока может определяться способом, пригодным для режима РЗ.
[0017] Гибридное транспортное средство может работать или в режиме РЗ, или в режиме ПЗ. Управление определением неисправности включает в себя первый процессинг, который выполняется, когда гибридное транспортное средство находится в режиме ПЗ, и когда катализатор каталитического устройства с электроподогревом имеет температуру, которая ниже заданной величины, и двигатель внутреннего сгорания не работает, а также второй процессинг, который выполняется, когда гибридное транспортное средство находится в режиме ПЗ, и когда катализатор имеет температуру, которая равна или выше заданной величины. При первом процессинге, контроллер может управляет электроэнергией, которая подается на каталитическое устройство с электроподогревом, при этом подается первая электроэнергия, которая требуется для определения того, имеется ли неисправность в первом датчике тока и для прогрева каталитического устройства с электроподогревом. При втором процессинге, контроллер может управляет электроэнергией, которая подается на каталитическое устройство с электроподогревом, при этом может подаваться вторая электроэнергия, которая меньше первой электроэнергии.
[0018] Когда гибридное транспортное средство находится в режиме ПЗ, в котором двигатель внутреннего сгорания работает должным образом, чтобы поддерживать СЗ в заданном диапазоне, каталитическому устройству с электроподогревом нужен прогрев, когда катализатор имеет температуру, которая ниже заданной величины, и двигатель внутреннего сгорания не работает, при этом каталитическому устройству с электроподогревом не нужен прогрев, когда катализатор имеет температуру, которая равна или выше заданной величины. Как описано выше, в этом гибридном транспортном средстве, необходимость прогрева каталитического устройства с электроподогревом определяется способом, пригодным для режима ПЗ, и выполняется первый или второй процессинг, как описано выше. Таким образом, в соответствии с этим гибридным транспортным средством, неисправность первого датчика тока может определяться способом, пригодным для режима ПЗ.
[0019] Согласно объекту изобретения, может быть создано гибридное транспортное средство, в котором неисправность датчика тока КЭП может определяться без избыточного датчика тока КЭП.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] Признаки, преимущества, а также техническое и промышленное значение примерных вариантов реализации изобретения будут описаны ниже со ссылкой на сопроводительные чертежи, на которых одинаковыми цифрами обозначены одинаковые элементы, и на которых:
Фиг. 1 представляет собой общую схему конфигурации гибридного транспортного средства согласно первому варианту реализации изобретения;
Фиг. 2 представляет собой диаграмму, которая иллюстрирует конфигурацию КЭП;
Фиг. 3 представляет собой диаграмму, которая иллюстрирует режим РЗ и режим ПЗ;
Фиг. 4 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру процессинга определения неисправности датчика тока КЭП, которая выполняется ЭБУ;
Фиг. 5 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру 1 процессинга определения неисправности, которая выполняется на этапах S14 и S26 на фиг. 4;
Фиг. 6 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру 2 процессинга определения неисправности, которая выполняется на этапах S18 и S28 на фиг. 4;
Фиг. 7 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру мониторинга процессинга определения неисправности;
Фиг. 8 представляет собой общую схему конфигурации гибридного транспортного средства согласно второму варианту реализации;
Фиг. 9 представляет собой блок-схему, которая иллюстрирует процедуру 1 процессинга определения неисправности, которая выполняется во втором варианте реализации; и
Фиг. 10 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру 2 процессинга определения неисправности, которая выполняется во втором варианте реализации.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
[0021] Варианты реализации изобретения подробно описаны ниже со ссылкой на чертежи. Идентичные или соответствующие части обозначены одинаковыми ссылочными номерами на всех чертежах, и их описание не повторяется.
[0022] Первый вариант реализации
Фиг. 1 представляет собой общую схему конфигурации гибридного транспортного средства согласно первому варианту реализации изобретения. Как видно из фиг. 1, гибридное транспортное средство 1 включает в себя двигатель 10, двигатели-генераторы 15 и 20, устройство 25 деления мощности, ведущие колеса 30, выхлопной канал 80, и устройство 82 КЭП.
[0023] Двигатель 10 представляет собой двигатель внутреннего сгорания, который выдает мощность за счет преобразования энергии горения, которая вырабатывается при сжигании воздушно-топливной смеси, в кинетическую энергию движущегося элемента, такого как поршень или ротор.
[0024] Двигатели-генераторы 15 и 20 представляют собой вращающиеся электрические машины переменного тока, такие как трехфазные синхронные электродвигатели переменного тока с постоянными магнитами, встроенными в ротор. Двигатель-генератор 15 используется в качестве силового генератора, который приводится в действие двигателем 10 через устройство 25 деления мощности, а также в качестве электродвигателя для запуска двигателя 10. Двигатель-генератор 20 работает в первую очередь как электродвигатель для приведения в действие ведущих колес 30. Когда гидравлическое транспортное средство 1 тормозится, или ускорение гибридного транспортного средства 1 замедляется на нисходящем откосе, электродвигатель-генератор 20 работает как генератор электроэнергии, производящий регенеративную электроэнергию.
[0025] Устройство 25 деления мощности включает в себя планетарный зубчатый механизм, который имеет, например, три вращающихся вала, солнечную шестерню, водило и кольцевую шестерню. Устройство 25 деления мощности делит мощность привода от двигателя 10 на две части. Часть мощности передается на вращающийся вал двигателя-генератора 15, а остальная часть мощности передается на приводные колеса 30.
[0026] Устройство 82 КЭП включает в себя КЭП 85 и источник 90 питания КЭП. КЭП 85 расположен в выхлопном канале 80 двигателя 10. КЭП 85 имеет катализатор, который очищает выхлопные газы из двигателя 10, и выполнен с возможностью нагрева катализатора с помощью электроэнергии, которая подается из источника 90 питания КЭП. Источник 90 питания КЭП меняет напряжение электроэнергии, которая подается из устройства 40 накапливания электроэнергии через спаренные линии PL3 и NL3 электропитания, на номинальное напряжение КЭП 85 и подает электроэнергию на КЭП 85.
[0027] Фиг. 2 представляет собой диаграмму, которая иллюстрирует конфигурацию КЭП 85. На фиг. 2 показано поперечное сечение КЭП 85, взятое вдоль направления потока выхлопных газов. Как видно из фиг. 2, КЭП 85 включает в себя подложку 300 катализатора, изоляционный элемент 310, и электроды 320 и 330
[0028] Подложка 300 катализатора встроена в выхлопной канал 80, и образована проводящим элементом в виде круглого или эллипсоидального цилиндра и пр., который имеет сотовую структуру в поперечном сечении, перпендикулярном направлению потока выхлопных газов, например. На подложке 300 катализатора смонтирован трехходовой катализатор, окислительный катализатор или подобный элемент (не показано), а вредные компоненты в выхлопных газах, которые проходят через КЭП 85, удаляются с помощью подложки 300 катализатора.
[0029] Изоляционный элемент 310, расположенный между внешней периферийной поверхностью подложки 300 катализатора и внутренней периферийной поверхностью выхлопного канала 80, и образован из элемента, который имеет электроизоляционные свойства и теплоизоляционные свойства. В качестве изоляционного элемента 310 используется изоляционный материал, такой как оксид алюминия.
[0030] Электрод 320 электрически соединен с подложкой 300 на входном конце подложки 300 катализатора относительно направления потока выхлопных газов. Электрод 330 электрически соединен с подложкой 300 на нижнем конце подложки 300 относительно направления потока выхлопных газов. Другие концы электродов 320 и 330 соединены с источником 90 питания КЭП (фиг. 1). Когда напряжение подается на подложку 300 катализатора из источника 90 питания КЭП через электроды 320 и 330, ток течет через подложку 300 катализатора, и подложка 300 катализатора генерирует тепло из-за его электрического сопротивления. Это повышает температуру трехходового катализатора или окислительного катализатора, который установлен на подложке 300 катализатора. Затем КЭП 85 становится каталитически активным и способным эффективно очищать выхлопные газы.
[0031] Конфигурация КЭП 85 не ограничивается той, что показана на фиг. 2, и к КЭП 85 применимы различные типы известных КЭП.
[0032] Как видно опять же из фиг. 1, гибридное транспортное средство 1 также включает в себя устройство 40 накапливания электроэнергии, главное реле системы (которое в дальнейшем именуется как «ГРС») 45, блок управления электроэнергией (которое в дальнейшем именуется как «БУЭ») 50, вспомогательные машины 70, и электрический воздушный кондиционер 75. Гибридное транспортное средство 1 дополнительно включает в себя электронный блок управления (которое в дальнейшем именуется как «ЭБУ») 100, датчики 110, 115, 120, 125 и 130 тока, зарядное устройство 150, и секцию 160 приема электроэнергии.
[0033] Устройство 40 накапливания электроэнергии является перезаряжаемым источником питания постоянного тока, и включает в себя вторичную батарею, такую как никель-водородная батарея или литиево-ионная батарея. Устройство 40 накапливания электроэнергии может подавать электроэнергию на БУЭ 50, электрический воздушный кондиционер 75 и источник 90 питания КЭП. Устройство 40 накапливания электроэнергии заряжается с помощью электроэнергии, которая подается из двигателя-генератора 15 и/или двигателя-генератора 20 через БУЭ 50, когда двигатель-генератор 15 и/или электродвигатель-генератор 20 вырабатывает электроэнергию. Кроме того, устройство 40 накапливания электроэнергии может заряжаться с помощью электроэнергии, которая подается из внешнего источника 200 питания через секцию 160 приемки электроэнергии, в качестве устройства 40 накапливания электроэнергии может использоваться конденсатор большой емкости.
[0034] Состояние заряда (СЗ) устройства 40 накапливания электроэнергии выражается, например, процентом текущей величины заряда тока в устройстве 40 накапливания электроэнергии к его полной зарядной емкости. СЗ рассчитывается на основе входного/выходного тока устройства 40 накапливания электроэнергии, который определяется датчиком 110 тока, и/или выходным напряжением устройства 40 накапливания электроэнергии, которое, например, определяется датчиком напряжения (не показано). СЗ может вычисляться в ЭБУ, который дополнительно оснащен устройством 40 накапливания электроэнергии, или может вычисляться в ЭБУ 100 на основе значения величины определения входного/выходного тока и/или выходного напряжения устройства 40 накапливания электроэнергии.
[0035] ГРС 45 расположено между устройством 40 накапливания электроэнергии и спаренными линиями PL1 и NL1 электропитания. ГРС 45 активируется для переключения гибридного транспортного средства 1 в «состояние готовности к работе» в ответ на управляющий сигнал от ЭБУ 100, когда пользователь задействует выключатель питания (не показан), нажимая, например, на педаль тормоза.
[0036] БУЭ 50 включает в себя повышающий преобразователь 55, инвертор 60, и преобразователь 65 постоянного тока в постоянный. Повышающий преобразователь 55 расположен между спаренными линиями PL1 и NL1 электропитания и спаренными линиями PL2 и NL2 электропитания, и увеличивает напряжение между спаренными линиями PL2 и NL2 электропитания до уровня, который равен или выше, чем напряжение между спаренными линиями PL1 и NL1 электропитания на основе управляющего сигнала от ЭБУ 100. Повышающий преобразователь 55 образован, например, из повышающей цепи обратимого тока прерывистого действия.
[0037] Инвертор 60 расположен между спаренными линиями PL2 и NL2 электропитания и двигателями-генераторами 15 и 20. Инвертор 60 приводит в действие двигатели-генераторы 15 и 20 на основе управляющего сигнала от ЭБУ 100. Инвертор 60 образован из мостовых схем, каждая из которых предусмотрена для соответствующего одного из двигателей-генераторов 15 и 20, и включает в себя переключающие элементы для трех фаз, например.
[0038] Преобразователь 65 ПТ/ПТ соединен со спаренными линиями PL1 и NL1 электропитания. Преобразователь 65 ПТ/ПТ уменьшает напряжение электроэнергии, которая подается из спаренных линий PL1 и NL1 электропитания, до напряжения вспомогательной машины и подает электроэнергию на вспомогательные машины 70 на основе управляющего сигнала от ЭБУ 100. Вспомогательные машины 70 всесторонне представляют различные вспомогательные машины и аккумулятор вспомогательной машины, которые смонтированы в гибридном транспортном средстве 1.
[0039] Электрический воздушный кондиционер 75 соединен со спаренными линиями PL1 и NL1 электропитания и снабжается рабочей электроэнергией из устройства 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания. Электрический воздушный кондиционер 75 управляет температурой в кабине гибридного транспортного средства 1 на основе управляющего сигнала от ЭБУ 100.
[0040] Источник 90 электропитания КЭП соединен со спаренными линиями PL1 и NL1 электропитания через спаренные линии PL3 и NL3 электропитания и снабжается электроэнергией из устройства 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания и спаренные линии PL3 и NL3 электропитания. Источник 90 питания КЭП меняет напряжение электроэнергии из спаренных линий PL3 и NL3 электропитания на номинальное напряжение КЭП 85 и подает электроэнергию на КЭП 85 на основе управляющего сигнала от ЭБУ 100.
[0041] Зарядное устройство 150 соединено со спаренными линиями PL1 и NL1 электропитания. Зарядное устройство 150 меняет напряжение электроэнергии, которая подается от внешнего источника 200 питания через секцию 160 приема электроэнергии до уровня, пригодного для устройства 40 накапливания электроэнергии, и выдает электроэнергию на устройство 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания (изменение устройства 40 накапливания электроэнергии с помощью электроэнергии от внешнего источника 200 питания может именоваться как «внешняя зарядка»). Зарядное устройство 150 включает в себя преобразователь переменного тока в постоянный, который преобразовывает электроэнергию переменного тока, которая подается от внешнего источника 200 питания через секцию 160 приемки электроэнергии в электроэнергию постоянного тока, а преобразователь (ПТ/ПТ), который меняет напряжение на выходе из преобразователя переменного тока в постоянный до уровня, пригодного для устройства 40 накапливания электроэнергии, например.
[0042] Секция 160 приема электроэнергии принимает электроэнергию от внешнего источника 200 питания и выдает электроэнергия на зарядное устройство 150. Секция 160 приема электроэнергии может быть образована входом, к которому может быть подключен разъем зарядного кабеля, который соединен с внешним источником 200 питания, или энергоприемной катушкой, которая может принимать электроэнергию от катушки передачи энергии, расположенной на стороне внешнего источника 200 питания через магнитное поле бесконтактным способом.
[0043] Датчик 110 тока определяет ток IB, который подается на устройство 40 накапливания электроэнергии или выдается из него, и выдает величину определения, соответствующую току IB, на ЭБУ 100. Датчик тока 115 определяет ток IAC, который подается из устройства 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания на электрический воздушный кондиционер 75 и выдает величину определения, соответствующую току IAC, на ЭБУ 100. Датчик 120 тока определяет ток IC, который подается из устройства 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания на повышающий преобразователь 55 и выдает величину определения, соответствующую току IC, на ЭБУ 100.
[0044] Датчик тока 125 определяет ток IA, который подается из устройства 40 накапливания электроэнергии через преобразователь 65 (ПТ/ПТ) на вспомогательные машины 70 и выдает величину определения, соответствующую току IA, на ЭБУ 100. Датчик 130 тока определяет ток IE, который подается из устройства 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания и спаренные линии PL3 и NL3 электропитания на источник 90 питания КЭП, и выдает величину определения, соответствующую току IE, на ЭБУ 100. Другими словами, датчик 130 тока представляет собой датчик тока КЭП, который определяет ток IE, который подается на устройство 82 КЭП (датчик 130 тока может именоваться также «датчиком 130 тока КЭП»).
[0045] ЭБУ 100 включает в себя ЦП (центральный процессор), ПЗУ (постоянное запоминающее устройство), в котором хранятся программы обработки и т.д., ОЗУ (временное запоминающее устройство), в котором временно хранятся данные, порт ввода/вывода, через который передаются различные сигналы, и так далее (из которых показаны не все), и управляет всеми устройствами в гибридном транспортном средстве 1. Управление этими устройствами необязательно может быть достигнуто обработкой, которая выполняется за счет программного обеспечения, и может быть достигнуто обработкой, которая выполняется специализированным оборудованием (электронная схема).
[0046] Одной из основных функций управления ЭБУ 100 является управление рабочим состоянием гибридного транспортного средства 1 путем выборочного принятия режима РЗ и режима ПЗ. Режим РЗ представляет собой режим, в котором СЗ устройства 40 накапливания электроэнергии предпочтительно расходуется, главным образом, при приведении гибридного транспортного средства 1 в режим ЭТ (электрического транспортного средства), и при этом обеспечивая движение гибридного транспортного средства 1 в режиме ГТ (гибридного транспортного средства). Режим ПЗ представляет собой режим, в котором СЗ контролируется в заданном диапазоне путем переключения гибридного транспортного средства 1 между режимом ГТ и режимом ЭТ соответственно. В режиме ЭТ, гибридное транспортное средство 1 питается только от электродвигателя-генератора 20 с остановленным двигателем 10. В режиме ГТ, гибридное транспортное средство 1 питается от двигателя 10 и двигателя-генератора 20.
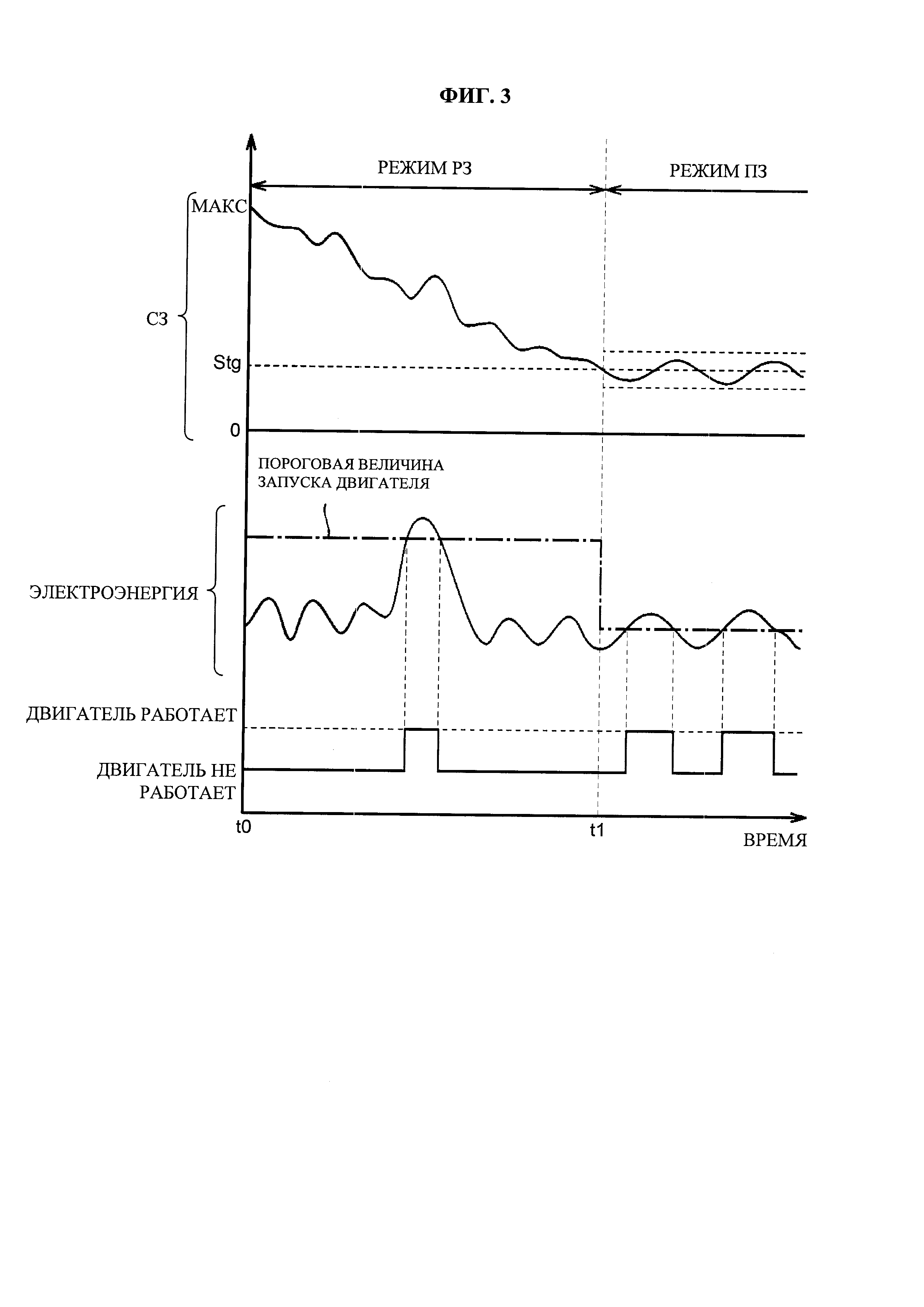
[0047] Фиг. 3 представляет собой диаграмму, которая иллюстрирует режим РЗ и режим ПЗ. Обращаясь к фиг. 3, предположим, что гибридное транспортное средство 1 начинает приводиться движение в режиме РЗ (в момент t0 времени) после того, как устройство 40 накапливания электроэнергии заряжается до полной мощности (СЗ=МАХ) с помощью электроэнергии от внешнего источника 200 питания посредством внешней зарядки.
[0048] Режим РЗ представляет собой режим, в котором СЗ в устройстве 40 накапливания электроэнергии предпочтительно расходуется. В режиме РЗ в основном расходуется электроэнергия, которая накопилась в устройстве 40 накапливания электроэнергии (главным образом, электроэнергия, заряженная посредством внешней зарядки). Когда гибридное транспортное средство 1 работает в режиме РЗ, двигатель 10 не работает, чтобы поддерживать СЗ. Таким образом, хотя СЗ может временно возрасти из-за регенеративной электроэнергии, которая восстанавливается, когда, например, гибридное транспортное средство 1 замедляется или электроэнергии, которая генерируется при периодической работе двигателя 10, СЗ в конечном итоге в целом уменьшается при увеличении расстояния пробега, поскольку скорость разрядки превышает скорость зарядки.
[0049] Режим ПЗ представляет собой режим, в котором СЗ устройства 40 накапливания электроэнергии управляется в заданном диапазоне. В качестве одного примера, когда СЗ падает до пороговой величины Stg, которая указывает на снижение СЗ в момент tl времени, выбирается режим ПЗ, так чтобы СЗ может после этого сохраняться в заданном диапазоне. В частности, двигатель 10 работает (режим ГТ), когда СЗ уменьшается, и двигатель 10 останавливается (режим ЭТ), когда СЗ увеличивается. Другими словами, в режиме ПЗ, двигатель 10 работает, чтобы поддерживать СЗ. Как описано выше, двигатель 10 работает должным образом, чтобы поддерживать СЗ в режиме ПЗ, в то время как в режиме РЗ, в котором двигатель 10 не работает, чтобы поддерживать СЗ, двигатель 10 управляется так, чтобы работать менее часто, чем в режиме ПЗ.
[0050] Когда электроэнергия, которая требуется для приведения в движение гибридного транспортного средства 1, меньше, чем заданная пороговая величина запуска двигателя, гибридное транспортное средство 1 приводится в движение двигателем-генератором 20 при остановленном двигателе 10 (режим ЭТ). С другой стороны, когда требуемая мощность превышает пороговую величину запуска двигателя, гибридное транспортное средство 1 движется с помощью работающего двигателя 10 (режим ГТ). В режиме ГТ, гибридное транспортное средство 1 движется с использованием движущей силы от двигателя 10 в дополнение или вместо движущей силы от двигателя-генератора 20. Электроэнергия, генерируемая двигателем-генератором 15, который приводится в действие двигателем 10, в то время как гибридное транспортное средство 1 движется в режиме ГТ, напрямую подается на двигатель-генератор 20 или накапливается в устройстве 40 накапливания электроэнергии.
[0051] Пороговая величина запуска двигателя в режиме РЗ предпочтительно больше, чем пороговая величина запуска двигателя в режиме ПЗ. Другими словами, область, в которой гибридное транспортное средство 1 движется в режиме ЭТ в режиме РЗ, предпочтительно больше, чем область, в которой гибридное транспортное средство 1 движется в режиме ЭТ в режиме ПЗ. Далее, в режиме РЗ, частота, с которой запускается двигатель 10, дополнительно уменьшается, и возможности для гибридного транспортного средства 1 двигаться в режиме ЭТ еще больше увеличиваются по сравнению с таковыми в режиме ПЗ. С другой стороны, в режиме ПЗ гибридное транспортное средство 1 может управляться, при этом оно может эффективно управляться как двигателем 10, так и двигателем-генератором 20.
[0052] Следует отметить, что даже когда гибридное транспортное средство 1 находится в режиме РЗ, двигатель 10 работает, когда требуемая мощность превышает пороговую величину запуска двигателя, и также может работать в некоторых случаях, например, для прогрева двигателя 10, даже когда требуемая мощность не больше, чем пороговая величина запуска двигателя. С другой стороны, даже когда гибридное транспортное средство 1 находится в режиме ПЗ, двигатель 10 останавливается, когда СЗ увеличивается до определенного уровня. Другими словами, режим РЗ не ограничивается режимом ЭТ, в котором гибридное транспортное средство 1 движется с остановленным двигателем 10, а режим ПЗ не ограничивается режимом ГТ, в котором гибридное транспортное средство 1 движется с работающим двигателем 10. И в режиме РЗ, и в режиме ПЗ, гибридное транспортное средство 1 может работать или в режиме ЭТ, или режиме ГТ.
[0053] Как видно опять же из фиг. 1, ЭБУ 100 выполняет управление определением неисправности для определения того, действительно ли датчик 130 тока КЭП, который определяет ток IE, подаваемый на устройство 82 КЭП, имеет неисправность. Когда датчик 130 тока КЭП имеет неисправность, электроэнергия, которая подается на КЭП 85, может быть определена неправильно и могут возникнуть следующие проблемы. Например, когда датчик 130 тока КЭП выдает определение величины, которая выше фактической величины тока, то подача электроэнергии на КЭП 85 может быть недостаточной. Тогда показатель очистки выхлопных газов КЭП 85 может быть понижен, так как КЭП 85 может недостаточно прогреваться. С другой стороны, когда датчик 130 тока КЭП выдает величину определения, которая ниже фактической величины тока, подача электроэнергии КЭП может быть чрезмерной. Тогда в КЭП 85 могут локально образоваться перегретые области, и результирующий тепловой шок может вызвать появление трещин в подложке 300 катализатора (фиг. 2) КЭП 85. Поэтому неисправность датчика 130 тока КЭП необходимо обнаруживать. Тем не менее, избыточный датчик 130 тока КЭП для обнаружения неисправности датчика 130 тока КЭП приводит к проблеме, такой как увеличение стоимости или размеров оборудования, что может ухудшить конкурентоспособность гибридного транспортного средства 1.
[0054] Таким образом, в гибридном транспортном средстве 1 согласно этому первому варианту реализации, ЭБУ 100 оценивает ток, который подается из устройства 40 накапливания электроэнергии на устройство 82 КЭП (который может именоваться также «током КЭП») с использованием величины определения от существующего датчика 110 тока, который определяет выходной ток устройства 40 накапливания электроэнергии. Далее ЭБУ 100 сравнивает оценочную величину тока КЭП с величиной определения от датчика 130 тока КЭП, и определяет, что датчик 130 тока КЭП имеет неисправность, когда имеется разница между оценочной величиной и величиной определения. Эта конфигурация делает возможной определение неисправность датчика 130 тока КЭП без создания датчика 130 тока КЭП.
[0055] При вышеуказанном управлении определением неисправности, ЭБУ 100 выполняет различный процессинг для определения неисправности датчика 130 тока КЭП в зависимости от выбранного режима (режима РЗ/режима ПЗ). В частности, когда гибридное транспортное средство 1 находится в режиме РЗ, и СЗ равно или выше заданного уровня, нет необходимости для прогрева КЭП 85, поскольку режим РЗ будет продолжаться, и запуск двигателя 10 в это время менее вероятен. Когда СЗ падает ниже заданного уровня, производится переключение режима ПЗ, и двигатель 10 при этом вскоре запускается. С другой стороны, когда гибридное транспортное средство 1 находится в режиме ПЗ, в котором двигатель 10 работает должным образом, чтобы поддерживать СЗ в заданном диапазоне, КЭП 85 нужен прогрев, когда КЭП 85 имеет температуру, которая ниже заданной величины, и двигатель 10 не работает, в силу чего КЭП не нужен прогрев, если КЭП 85 имеет температуру, которая равна или выше заданной величины.
[0056] ЭБУ 100 выполняет процессинг для обнаружения неисправности датчика 130 тока КЭП способом, пригодным для выбранного режима в зависимости от того, находится ли он в режиме РЗ или режиме ПЗ. Затем, ЭБУ 100 выполняет различный процессинг в зависимости от того, нужен ли КЭП 85 прогрев при процессинге определения неисправности для каждого режима. В частности, когда КЭП 85 нуждается в прогреве, ЭБУ 100 подает электроэнергию на устройство 82 КЭП, чтобы обнаружить неисправность датчика 130 тока КЭП во время прогрева КЭП 85. С другой стороны, когда КЭП 85 не нуждается в прогреве, ЭБУ 100 подает электроэнергию на устройство 82 КЭП только для обнаружения неисправности датчика 130 тока КЭП, во время обнаружения неисправности датчика 130 тока КЭП. В дальнейшем будет подробно описано управление определением неисправности, которое выполняется ЭБУ 100 для определения того, действительно ли датчик 130 тока КЭП имеет неисправность.
[0057] Фиг. 4 представляет собой блок-схему последовательности операций, которая, которая иллюстрирует процедуру процессинга управления определением неисправности датчика 130 тока КЭП, которая выполняется ЭБУ 100. Это управление определением неисправности выполняется, когда гибридное транспортное средство 1 находится в состоянии готовности к включению. Например, оно выполняется непосредственно после переключения гибридного транспортного средства 1 из состояния готовности к выключению в состояние готовности к включению.
[0058] Как видно из фиг. 4, ЭБУ 100 определяет, был ли выбран режим РЗ (этап S10). Если определено, что был выбран режим РЗ (ДА на этапе S10), ЭБУ 100 выполняет процессинг определения неисправности для режима РЗ. В частности, ЭБУ 100 сначала определяет, является ли СЗ устройства 40 накапливания электроэнергии равным или выше, чем пороговая величина Sth (этап S12). Пороговая величина Sth представляет собой величину определения СЗ, которая используется для определения того, действительно ли вскоре будет сделано переключение из режима РЗ в режим ПЗ из-за снижения СЗ. Например, пороговая величина Sth установлена на значение, которое несколько выше, чем пороговая величина Stg (фиг. 3), при котором переключение из режима РЗ в режим ПЗ производится из-за уменьшения СЗ.
[0059] Если определяется на этапе S12, что СЗ равно или выше, чем пороговая величина Sth (ДА на этапе S12), определяется, что переключения из режима РЗ в режим ПЗ скоро не произойдет, и ЭБУ 100 выполняет процессинг 1 определения неисправности датчика тока КЭП (который может именоваться также «процессинг 1 определения неисправности») (этап S14). При процессинге 1 определения неисправности, электроэнергия подается на устройство 82 КЭП только для определения неисправности датчика 130 тока КЭП, во время выполнения определения неисправности. Другими словами, когда СЗ равно или выше, чем пороговая величина, предполагается, что в настоящее время режим РЗ будет продолжаться, КЭП 85 не нуждается в прогреве, так как запуск двигателя 10 менее вероятен. Таким образом, при процессинге 1 определения неисправности, относительно небольшое количество электроэнергии подается на КЭП 85 только для обнаружения неисправности датчика 130 тока КЭП, в то время как выполняется обнаружение неисправности. Процессинг 1 определения неисправности соответствует «второму процессингу» в этом изобретении. Процессинг 1 определения неисправности подробно описан ниже.
[0060] Если определяется на этапе S12, что СЗ ниже, чем пороговая величина Sth (НЕТ на этапе S12), ЭБУ 100 определяет, ниже ли температура КЭП 85, чем пороговая величина Tth (этап S16). Это определение делается для проверки состояния прогрева КЭП 85, поскольку гибридное транспортное средство 1 вскоре переключается в режим ПЗ, в котором двигатель 10 работает должным образом, чтобы поддерживать СЗ устройства 40 накапливания электроэнергии в заданном диапазоне, когда СЗ падает ниже пороговой величины Sth. Состояние прогрева КЭП 85 должно проверяться в связи с тем, что КЭП 85 мог нагреваться в результате предыдущей поездки или случайного срабатывания двигателя 10 даже в режиме РЗ, в котором двигатель 10 запускается с меньшей вероятностью. Температура КЭП 85 определяется, например, датчиком температуры (не показано).
[0061] Затем, если определено на этапе S16, что температура КЭП 85 ниже, чем пороговая величина Tth (ДА на этапе S16), определяется, что КЭП 85 не был прогрет, и ЭБУ 100 выполняет процессинг 2 определения неисправности датчика тока КЭП (который может именоваться также просто «процессинг 2 определения неисправности») (этап S18).
При процессинге 2 определения неисправности, электроэнергия подается на устройство 82 КЭП для определения неисправности датчика 130 тока КЭП, во время прогрева КЭП 85. Другими словами, поскольку двигатель 10 работает по мере необходимости, чтобы поддерживать СЗ устройства 40 накапливания электроэнергии в заданном диапазоне в режиме ПЗ, желательно, что КЭП 85 был предварительно прогрет. Таким образом, при процессинге 2 определения неисправности, большее количество электроэнергии, чем при процессинге 1 определения неисправности, подается на КЭП 85, при этом неисправность датчика 130 тока КЭП может определяться во время прогрева КЭП 85. Процессинг 2 определения неисправности соответствует «первому процессингу» в этом изобретении. Процессинг 2 определения неисправности также подробно описан ниже.
[0062] Если на этапе S16 определено, что температура КЭП 85 равна или выше, чем пороговая величина Tth (НЕТ на этапе S16), то определяется, что КЭП 85 был прогрет, и ЭБУ 100 переводит процессинг на этап S14 и выполняет процессинг 1 определения неисправности. Это связано с тем, что относительно небольшое количество электроэнергии необходимо подавать в КЭП 85 только для обнаружения неисправности датчика 130 тока КЭП, когда КЭП 85 был прогрет.
[0063] С другой стороны, если определяется на этапе S10, что режим ПЗ выбран (НЕТ на этапе S10), ЭБУ 100 выполняет процессинг определения неисправности для режима ПЗ. В частности, ЭБУ 100 сначала определяет, ниже ли температура КЭП 85 пороговой величины Tth (этап S20). Если определено, что температура КЭП 85 равна или выше, чем пороговая величина Tth (НЕТ на этапе S20), то определяется, что КЭП 85 был прогрет, и ЭБУ 100 выполняет процессинг 1 определения неисправности (этап S26). Процессинг 1 определения неисправности такой же, что и процессинг, который выполняется на этапе S14 (описано ниже).
[0064] Если определяется на этапе S20, что температура КЭП 85 ниже, чем пороговая величина Tth (ДА на этапе S20), ЭБУ 100 определяет, работает ли двигатель 10 (этап S22). Если определено, что двигатель 10 работает (ДА на этапе S22), ЭБУ 100 ждет, пока двигатель 10 не остановится (этап S24). Это связано с тем, что нагрузки вспомогательных машин 70 нестабильны, и точность обнаружения неисправности может понизиться, в то время как двигатель 10 работает. Затем, если определено, что двигатель 10 остановился (ДА на этапе S24), ЭБУ 100 определяет, что КЭП 85 был прогрет выхлопным газом из двигателя 10, и передает процессинг на этап S26 и выполняет процессинг 1 определения неисправности.
[0065] Если определяется на этапе S22, что двигатель 10 не работает (НЕТ на этапе S22), другими словами, когда КЭП 85 не был прогрет, и двигатель 10 не работает, ЭБУ 100 выполняет процессинг 2 определения неисправности (этап S28). Процессинг 2 определения неисправности такой же, что и процессинг, который выполняется на этапе S18 (описанном ниже).
[0066] Процессинг 1 определения неисправности, которая выполняется на этапе S14 и S26, и процессинг 2 определения неисправности, который выполняется на этапах S18 и S28, описаны далее.
[0067] Фиг. 5 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру процессинг 1 определения неисправности, который выполняется на этапах S14 и S26 на фиг. 4. Как видно из фиг. 1 вместе с фиг. 5, ЭБУ 100 выполняет начальную проверку на датчике 130 тока КЭП (этап S110). В этой первоначальной проверке проверяется, прошло ли распознавание нулевой точки датчика 130 тока КЭП, и есть ли прерывание или короткое замыкание в линиях сигнала определения, например. Если определяется, что имеется неисправность, обнаруженная при первоначальной проверке (ДА на этапе S112), ЭБУ 100 переводит процессинг на этап S128 и определяет, что датчик 130 тока КЭП имеет неисправность.
[0068] Если определяется на этапе S112, что нет никакой неисправности, обнаруженной при первоначальной проверке (НЕТ на этапе S112), ЭБУ 100 определяет, выполнены ли условия выполнения определения неисправности (этап S114). Условия выполнения подробно описаны ниже. Далее, если определяется, что условия выполнения определения неисправности выполнены (ДА на этапе S114), ЭБУ 100 определяет неисправность датчика 130 тока КЭП с использованием величины определения от датчика 110 тока, который определяет входной/выходной ток устройства 40 накапливания электроэнергии. Другими словами, в этом первом варианте реализации, ток КЭП, которая подается на устройство 82 КЭП, оценивается с использованием величины определения от датчика 110 тока, и оценочная величина тока КЭП сравнивается с величиной определения от датчика 130 тока КЭП для определения неисправности датчика 130 тока КЭП, как описано ниже.
[0069] В частности, ЭБУ 100 генерирует команды для уменьшения токов, которые подаются из устройства 40 накапливания электроэнергии на другие компоненты, помимо КЭП 85 (этап S116). Величина определения от датчика 110 тока включает в себя, в дополнение к току КЭП, подаваемому из устройства 40 накапливания электроэнергии на устройство 82 КЭП, ток, который подается из устройства 40 накапливания электроэнергии на электрический воздушный кондиционер 75, ток, который подается из устройства 40 накапливания электроэнергии через преобразователь 65 ПТ/ПТ на вспомогательные машины 70, и ток, который передается между устройством 40 накапливания электроэнергии и электродвигателями-генераторами 15 и 20. Таким образом, в этом первом варианте реализации, токи, которые подаются из устройства 40 накапливания электроэнергии в электрический воздушный кондиционер 75 и вспомогательные машины 70 (другие компоненты), уменьшаются во время обнаружения неисправности, чтобы повысить точность оценки тока КЭП с использованием величины определения от датчика 110 тока.
[0070] Поскольку ток КЭП оценивается путем вычитания токов, которые подаются из устройства 40 накапливания электроэнергии на электрический воздушный кондиционер 75 и вспомогательные машины 70, из величины определения от датчика 110 тока, как описано ниже, то токи, которые подаются из устройства 40 накапливания электроэнергии на электрический воздушный кондиционер 75 и вспомогательные машины 70 (другие компоненты), не обязательно должны быть уменьшены до 0. Тем не менее точность оценки тока КЭП может быть повышена путем уменьшения этих токов.
[0071] В частности, ЭБУ 100 генерирует команду на снижение энергопотребления электрического воздушного кондиционера 75, и выдает генерированную команду на электрический воздушный кондиционер 75. Если электрический воздушный кондиционер 75 может быть отключен, ЭБУ 100 может выдать команду на выключение электрического воздушного кондиционера 75. Кроме того, ЭБУ 100 генерирует команду на снижение электроэнергии, которая подается из преобразователя 65 (ПТ/ПТ) на вспомогательные машины 70, и выдает генерированную команду на преобразователь 65 ПТ/ПТ. Например, ЭБУ 100 уменьшает выходное напряжение преобразователя 65 ПТ/ПТ до уровня, который ниже, чем напряжение, нужное вспомогательным машинам 70. Далее, электроэнергия, которая подается из преобразователя 65 ПТ/ПТ на вспомогательные машины 70, может быть снижена до 0.
[0072] Снижение тока, который передается между устройством 40 накапливания электроэнергии и двигателями-генераторами 15 и 20, не достигается путем непосредственного генерирования команды для уменьшения тока, идущего на двигатели-генераторы 15 и 20, или от них. Вместо этого это включено в условия выполнения определения неисправности на этапе S114. На этапе S114 определяется, что условия выполнения определения неисправности выполняются, когда выполняются следующие условия, например: (i) двигатель 10 не работает; (ii) команда приводной мощности от гибридного транспортного средства 1 равна 0: и (iii) электроэнергия, который может подаваться на устройство 82 КЭП, больше заданной величины.
[0073] Причиной условия (i) является то, что колебание энергопотребления вспомогательными машинами 70, которое может возникнуть при работе двигателя 10, может неблагоприятно повлиять на точность оценки тока КЭП с использованием величины определения от датчика 110 тока. Если колебание энергопотребления вспомогательных машин 70 невелико, когда двигатель 10 работает на холостом ходу, условие (i) может быть изменено следующим образом: двигатель 10 не работает или работает на холостом ходу.
[0074] Причиной условия (ii) является то, что на точность измерения тока КЭП с использованием величины определения от датчика 110 тока может оказать неблагоприятное воздействие ток, который протекает из устройства 40 накапливания электроэнергии на двигатели-генераторы 20, когда команда приводной мощности является положительной.
[0075] Причиной условия (iii) является то, что выход электроэнергии устройства 40 накапливания электроэнергии может достигать своего верхнего предела, так как может быть запущена подача электроэнергии из устройства 40 накапливания электроэнергии на КЭП 85 и двигатель 10, или подача электроэнергии на другие компоненты, отличные от КЭП 85, может быть ограничена, когда электроэнергия, которая может подаваться из устройства 40 накапливания электроэнергии на устройство 82 КЭП, падает ниже заданной величины (номинальной электроэнергии КЭП 85, например).
[0076] После выполнения этапа S116, ЭБУ 100 управляет источником 90 питания КЭП, при этом заданная электроэнергия определения неисправности может подаваться на КЭП 85 (этап S118). Другими словами, при этом процессинге 1 определения неисправности, относительно небольшое количество электроэнергии только для определения неисправности датчика 130 тока КЭП (электроэнергии для определения неисправности) подается на КЭП 85, во время выполнения определения неисправности.
[0077] Далее, ЭБУ 100 получает величины определения от датчика 110 тока, который определяет входной/выходной ток устройства 40 накапливания электроэнергии, и датчиков 115 и 125 тока (этап S120). Далее, ЭБУ 100 вычисляет оценочную величину тока КЭП, которая подается на устройство 82 КЭП с использованием величин определения, полученных на этапе S120 (этапе S122).
[0078] В частности, ЭБУ 100 вычисляет входной ток преобразователя 65 ПТ/ПТ, исходя из величины определения от датчика тока 125, и вычисляет оценочную величину тока КЭП путем вычитания расчетного входного тока преобразователя 65 ПТ/ПТ и величины определения от датчика тока 115 из величины определения от датчика 110 тока. Входной ток преобразователя 65 ПТ/ПТ рассчитывается путем умножения величины определения от датчика тока 125 на выходное напряжение преобразователя 65 ПТ/ПТ и деления полученного значения на входное напряжение преобразователя 65 ПТ/ПТ. Выходное напряжение преобразователя 65 ПТ/ПТ может быть определено датчиком напряжения (не показан) или может представлять собой выходное значение команды для преобразователя 65 ПТ/ПТ. В качестве входного напряжения преобразователя 65 ПТ/ПТ может быть использовано определенное значение напряжения устройства 40 накапливания электроэнергии.
[0079] Затем ЭБУ 100 получает величину определения от датчика 130 тока КЭП (этап S124). Затем ЭБУ 100 определяет, была ли абсолютная величина разницы между величиной определения датчика 130 тока КЭП, которая была определена на этапе S124, и оценочной величиной тока КЭП, которая была рассчитана на этапе S122, больше, чем заданная пороговая величина (этап S126). Пороговая величина представляет собой величину определения, которая используется для определения, что датчик 130 тока КЭП имеет неисправность, когда имеется разница между величиной определения от датчика 130 тока КЭП и оценочной величиной тока КЭП, которая вычисляется с использованием величиной определения от датчика 110 тока.
[0080] Другими словами, если определено на этапе S126, что абсолютная величина разницы между величиной определения датчика 130 тока КЭП и оценочной величиной тока КЭП, которая была рассчитана с использованием величины определения от датчика 110 тока, больше, чем пороговая величина (ДА на этапе S126), ЭБУ 100 определяет, что датчик 130 тока КЭП имеет неисправность (этап S128). После этого, ЭБУ 100 возвращает токи на другие компоненты, уменьшившиеся на этапе S116, до исходного уровня (этап S130).
[0081] Если определяется на этапе S126, что абсолютная величина разницы между величиной определения от датчика 130 тока КЭП и оценочной величиной тока КЭП не более, чем пороговая величина (НЕТ на этапе S126), ЭБУ 100 определяет, что датчик 130 тока КЭП находится в нормальном состоянии и переводит процессинг на этап S130.
[0082] Фиг. 6 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру процессинга 2 определения неисправности, которая выполняется на этапах S18 и S28 на фиг. 4. Как видно из фиг. 6, ЭБУ 100 выполняет начальную проверку на датчике 130 тока КЭП (этап S210) и определяет, имеется ли какая-либо неисправность, обнаруженная при первоначальной проверке (этап S212). Этапы S210 и S212 совпадают с этапами S110 и S112, соответственно, при процессинге 1 определения неисправности на фиг. 5.
[0083] Если определяется на этапе S212, что не имеется неисправности, обнаруженной при первоначальной проверке (НЕТ на этапе S212), ЭБУ 100 управляет источником 90 питания КЭП, при этом заданная электроэнергия прогрева КЭП может подаваться на КЭП 85 (этап S214). При этом процессинге 2 определения неисправности, неисправность датчика 130 тока КЭП определяется во время прогрева КЭП 85. В отличие от процессинга 1 определения неисправности, который выполняется только для определения неисправности, электроэнергия подается на КЭП 85, независимо от того, реализованы ли условия выполнения определения неисправности. При этом процессинге 2 определения неисправности, большее количество электроэнергии (электроэнергии прогрева КЭП), чем то, которое подается во время процессинга 1 определения неисправности, поступает на КЭП 85, при этом может выполняться определение неисправности во время прогрева как КЭП 85, как описано выше.
[0084] Далее, ЭБУ 100 определяет, реализованы ли условия выполнения определения неисправности (этап S216). Далее, если определяется, что условия выполнения определения неисправности выполнены (ДА на этапе S216), ЭБУ 100 генерирует команды для уменьшения токов, которые подаются из устройств 40 накапливания электроэнергии на другие компоненты, кроме КЭП 85 (этап S218). Поскольку этапы S216 и S218 совпадают с этапами S114 и S116, соответственно, при процессинге 1 определения неисправности на фиг. 5, избыточное описание не повторяется.
[0085] После этого ЭБУ 100 переносит процессинг на этап S220. Поскольку этапы S220 - S230 совпадают с этапами S120 - S130, соответственно, при процессинге 1 определения неисправности на фиг. 5, избыточное описание не повторяется.
[0086] Если определяется на этапе S216, что условия выполнения определения неисправности не реализованы (НЕТ на этапе S216), ЭБУ 100 определяет, возникла ли пауза с того момента, как прошел заданный период времени после подачи электроэнергии на КЭП 85 на этапе S214 (этап S232). При этом при процессинг 2 определения неисправности, электроэнергия прогрева КЭП подается на КЭП 85 для прогрева КЭП 85, независимо от того, реализованы ли условия выполнения определения неисправности. Тем не менее предусмотрено заданное номинальное время для подачи электроэнергии прогрева на КЭП 85, и указанный выше заданный период времени устанавливается равным этому номинальному времени.
[0087] Если определяется, что паузы не возникло (НЕТ на этапе S232), ЭБУ 100 возвращает процессинг на этап S216. Если определяется, что пауза возникла с того момента, как условия выполнения определения неисправности не были выполнены (ДА на этапе S232), ЭБУ 100 управляет источником 90 питания КЭП, при этом подача электроэнергии на КЭП 85 может быть остановлена (этап S234).
[0088] После этого ЭБУ 100 выполняет процессинг 1 определения неисправности на фиг. 5 (этап S236). Когда процессинг 2 определения неисправности завершен, до завершения процессинга во время и после этапа S218 из-за возникшей паузы, нет необходимости прогрева КЭП 85 (КЭП 85 был прогрет). Таким образом, выполняется процессинг 1 определения неисправности, в котором относительно небольшое количество электроэнергии только для определения неисправности датчика 130 тока КЭП (электроэнергии определение неисправности) подается на КЭП 85 во время определения неисправности.
[0089] Процессинг 1 или 2 определения неисправности выполняется, когда выбран режим РЗ, в котором двигатель 10 используется менее часто (ДА на этапе S10 на фиг. 4), или когда двигатель 10 не работает (НЕТ на этапе S22 или ДА на этапе S24 на фиг. 4), когда выбран режим ПЗ. Тем не менее, двигатель 10 может запускаться в ответ на работу акселератора, производимую пользователем, например, во время выполнения процессинга 1 или 2 определения неисправности. В таком случае ЭБУ 100 прекращает (сбрасывает на ноль) процессинг определения неисправности, который выполняется, и выполняет управление определением неисправности на фиг. 4 снова после остановки двигателя 10.
[0090] Фиг. 7 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру мониторинг выполнения процессинга определения неисправности. Процессинг, который показан на этой блок-схеме, периодически выполняется с заданными интервалами, когда гибридное транспортное средство 1 находится в состоянии готовности к включению.
[0091] Как видно из фиг. 7, ЭБУ 100 определяет, выполняется ли процессинг 1 определения неисправности на фиг. 5 или процессинг 2 определения неисправности на фиг. 6 (этап S310). Если ни процессинг 1 определения неисправности, ни процессинг 2 определения неисправности не выполняется (НЕТ на этапе S310), ЭБУ 100 переводит процессинг на возврат без выполнения последующих этапов.
[0092] Если определяется на этапе S310, что выполняется процессинг 1 или 2 определения неисправности (ДА на этапе S310), ЭБУ 100 определяет, был ли запущен двигатель 10 (этап S312). Если двигатель 10 не был запущен (НЕТ на этапе S312), ЭБУ 100 переводит процессинг на возврат.
[0093] Если определяется на этапе S312, что двигатель 10 был запущен (ДА на этапе S312), ЭБУ 100 заканчивает выполняемый процессинг определения неисправности (этап S314). После этого, ЭБУ 100 определяет, был ли остановлен двигатель 10 (этап S316). Далее, если определяется, что двигатель 10 был оставлен (ДА на этапе S316), ЭБУ 100 запускает управление определением неисправности на фиг. 4 снова с самого начала (этап S318).
[0094] Как описано выше, в этом первом варианте реализации, ток, который подается на устройство 82 КЭП, оценивается с использованием величины определения от датчика 110 тока, который определяет входной/выходной ток устройства 40 накапливания электроэнергии, и оценочная величина сравнивается с величиной определения от датчика 130 тока КЭП для определения неисправности датчика 130 тока КЭП. Таким образом, нет необходимости создавать избыточный датчик тока КЭП для определения неисправности датчика 130 тока КЭП. Согласно этому первому варианту реализации, неисправность датчика 130 тока КЭП может определяться без избыточного датчика тока КЭП.
[0095] Кроме того, согласно этому первому варианту реализации, неисправность датчика 130 тока КЭП определяется по-разному для двух режимов (режима РЗ/режима ПЗ) с разными условиями для запуска двигателя 10. Кроме того, необходимость прогрева КЭП 85 определяется при процессинге определения неисправности способом, пригодным для каждого режима (режима РЗ /режима ПЗ), и процессинге 1 или 2 определения неисправности выполняется должным образом. При процессинге 2 определения неисправности может определяться неисправность датчика 130 тока КЭП, в то время как прогревается КЭП 85. При процессинге 1 определения неисправности, определение неисправности может выполняться с помощью меньшего количества электроэнергии, чем при процессинге 2 определения неисправности для снижения энергопотребления.
[0096] Второй вариант реализации изобретения
В то время как КЭП 85 электрически соединяется со стороной низкого напряжения повышающего преобразователя 55 через источник 90 питания КЭП в первом варианте реализации, КЭП 85 электрически соединяется со стороной высокого напряжения повышающего преобразователя 55 во втором варианте реализации.
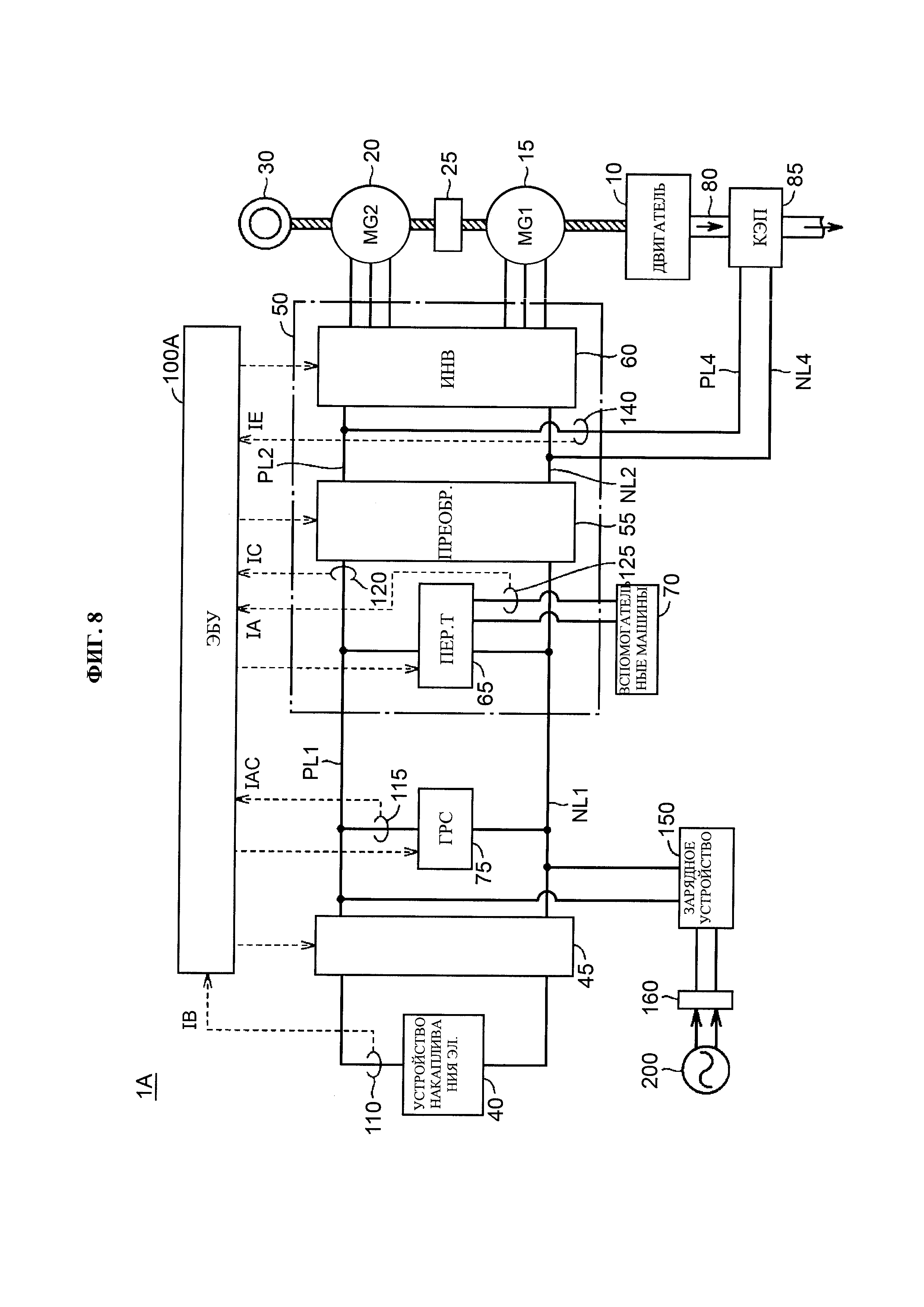
[0097] Фиг. 8 представляет собой общую схему конфигурации гибридного транспортного средства согласно второму варианту реализации. Как видно из фиг. 8, гибридное транспортное средство 1А имеет такую же конфигурацию, что и гибридное транспортное средство 1 согласно первому варианту реализации на фиг. 1, за тем исключением, что оно не включает в себя источник 90 питания КЭП, а включает в себя датчик тока 140 вместо датчика 130 тока и ЭБУ 100А вместо ЭБУ 100.
[0098] КЭП 85 соединен со спаренными линиями PL2 и NL2 электропитания через спаренные линии PL4 и NL4 электропитания, и снабжается электроэнергией из устройства 40 накапливания электроэнергии через повышающий преобразователь 55, спаренные линии PL2 и NL2 электропитания, и спаренные линии PL4 и NL4 электропитания.
[0099] Датчик тока 140 определяет ток IE, который подается из спаренных линий PL4 и NL4 электропитания на КЭП 85, и выдает величину определения, соответствующую току IE, на ЭБУ 100А. Другими словами, датчик тока 140 представляет собой датчик тока КЭП, который определяет ток IE, подаваемый на КЭП 85 (датчик тока 140 может именоваться также «датчиком 140 тока КЭП»).
[0100] ЭБУ 100А выполняет управление определением неисправности для определения того, действительно ли датчик 140 тока КЭП, который определяет ток IE, который подается на КЭП 85, имеет неисправность. В этом втором варианте реализации изобретения, КЭП 85 электрически соединяется со стороной высокого напряжения повышающего преобразователя 55, и датчик 120 тока, который определяет ток, подаваемый из устройства 40 накапливания электроэнергии через спаренные линии PL1 и NL1 электропитания на повышающий преобразователь 55, расположен на входной стороне (стороне низкого напряжения) повышающего преобразователя 55.
[0101] Таким образом, в гибридном транспортном средстве 1А согласно второму варианту реализации изобретения, ЭБУ 100А оценивает ток КЭП, который подается из устройства 40 накапливания электроэнергии на КЭП 85 с использованием величины определения из существующего датчика 120 тока, который определяет ток, подаваемый из устройства 40 накапливания электроэнергии на повышающий преобразователь 55. Далее, ЭБУ 100А сравнивает оценочную величину тока КЭП и величину определения от датчика 140 тока КЭП, и определяет, что датчик 140 тока КЭП имеет неисправность, если имеется разница между оценочной величиной и величиной определения. Эта конфигурация делает возможным определение неисправности датчика 140 тока КЭП без создания избыточного датчика 140 тока КЭП. Далее описано управление определением неисправности, которая выполняется ЭБУ 100А, для определения того, действительно ли датчик 140 тока КЭП имеет неисправность.
[0102] Процедура процессинга управления определением неисправности, которая выполняется ЭБУ 100А для определения того, действительно ли датчик 140 тока КЭП имеет неисправность, такая же, что и таковая первого варианта реализации изобретения на фиг. 4 в целом. При управлении определением неисправности второго варианта реализации изобретения, процедура процессинга 1 определения неисправности на этапе S14 и S26, и процедура процессинга 2 определения неисправности на этапах S18 и S28 отличаются от управления определением неисправности первого варианта реализации изобретения на фиг. 4.
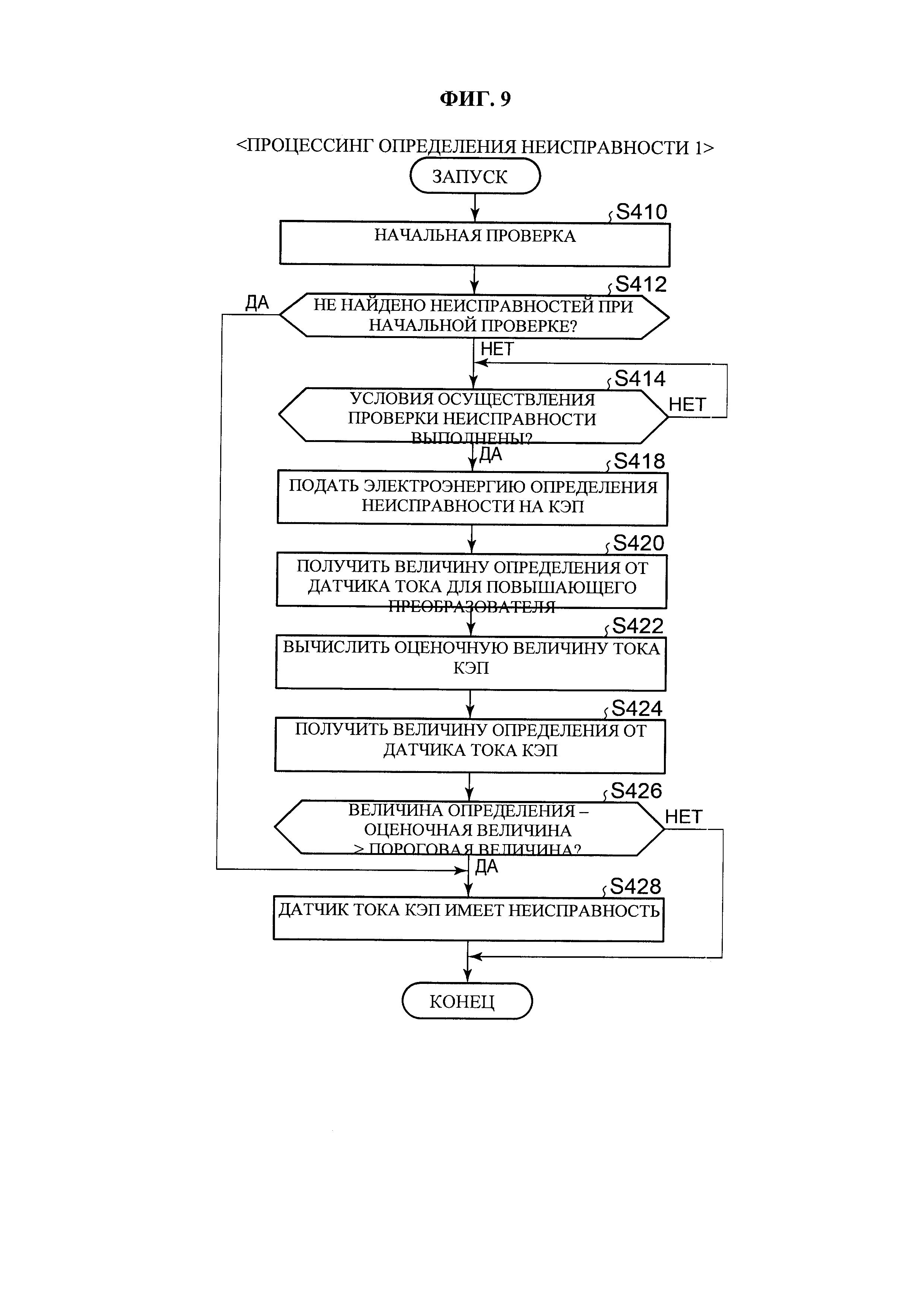
[0103] Фиг. 9 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру процессинга 1 определения неисправности, выполняемую во втором варианте реализации изобретения. Поскольку этапы S410 - S414 и этапы S426 и S428 на фиг. 9 являются такими же, что и этапы S110 - S114, а также этапы S126 и S128, соответственно, при процессинге 1 определения неисправности первого варианта реализации на фиг. 5 избыточное описание не повторяется.
[0104] Если определяется на этапе S414, что условия выполнения определения неисправности выполнены (ДА на этапе S414), ЭБУ 100А управляет повышающим преобразователем 55, при этом заданная электроэнергия определения неисправности может подаваться на КЭП 85 (этап S418). В частности, ЭБУ 100А управляет повышающим преобразователем 55, при этом выходное напряжение повышающего преобразователя 55 может быть равным номинальному напряжению КЭП 85. Когда выполняется процессинг определения неисправности, выходное напряжение повышающего преобразователя 55 не меняется, даже если функционируют двигатели-генераторы 15 и/или 20, поскольку двигатель 10 не работает, и требуемая приводная мощность равна 0.
[0105] Далее, ЭБУ 100А получает величину определения от датчика 120 тока, который определяет ток, подаваемый из устройства 40 накапливания электроэнергии на повышающий преобразователь 55 (этап S420). Далее, ЭБУ 100А вычисляет оценочную величину тока КЭП, которая подается на КЭП 85 с использованием величины определения от датчика 120 тока (этап S422). В частности, ЭБУ 100А использует величину определения от датчика 120 тока в качестве оценочной величины тока КЭП. Далее, ЭБУ 100А получает величину определения от датчика 140 тока КЭП (этап S424). После этого ЭБУ 100А переводит процессинг на этап S426.
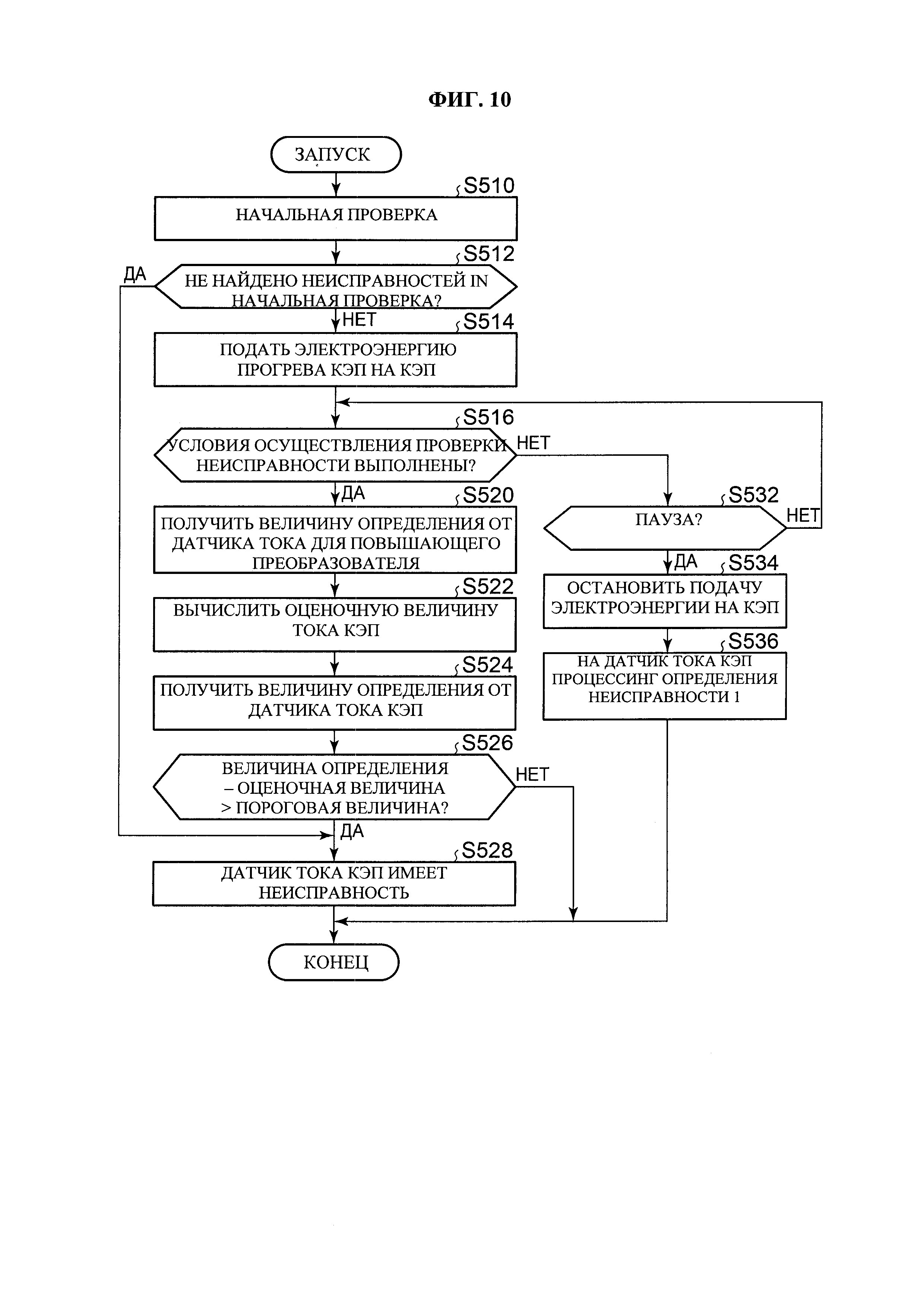
[0106] Фиг. 10 представляет собой блок-схему последовательности операций, которая иллюстрирует процедуру процессинга 2 определения неисправности, которая выполняется во втором варианте реализации изобретения. Поскольку этапы S510 - S516, этапы S526 и S528, а также этапы S532 - S536 на фиг. 10 такие же, что и этапы S210 - S216, этапы S226 и S228, а также этапы S232 - S236, соответственно, при процессинге 2 определения неисправности первого варианта реализации, на фиг. 6 избыточное описание не повторяется.
[0107] Если определяется на этапе S516, что условия выполнения определения неисправности выполнены (ДА на этапе S516), ЭБУ 100А получает величину определения от датчика 120 тока (этап S520). Далее, ЭБУ 100А вычисляет оценочную величину тока КЭП, которая подается на КЭП 85 с использованием величины определения от датчика 120 тока (этап S522). В частности, ЭБУ 100А использует величину определения от датчика 120 тока в качестве оценочной величины тока КЭП. Далее, ЭБУ 100А получает величину определения от датчика 140 тока КЭП (этап S524). После этого, ЭБУ 100А переводит процессинг на этап S526.
[0108] Согласно опять же второму варианту реализации, неисправность датчика 140 тока КЭП может определяться без создания избыточного датчика 140 тока КЭП, как и в первом варианте реализации. Кроме того, неисправность датчика 140 тока КЭП может определяться способом, пригодным для выбранного режима (режима РЗ/режима ПЗ).
[0109] В то время как ток КЭП оценивается с использованием величины определения от датчика 120 тока, который определяет ток, подаваемый на повышающий преобразователь 55 в вышеуказанном втором варианте реализации, ток КЭП может оцениваться с использованием величины определения от датчика 110 тока, который определяет входной ток устройства 40 накапливания электроэнергии в конфигурации, в которой КЭП 85 электрически соединяется со стороной высокого напряжения повышающего преобразователя 55 таким же образом, что и в первом варианте реализации. В этом случае, процедуры обработки для процессинга 1 и 2 определения неисправности такие же, как и таковые для процессинга 1 и 2 определения неисправности первого варианта реализации на фиг. 5 и фиг. 6, соответственно.
[0110] В то время как датчик 130 тока КЭП расположен на входной стороне источника 90 питания КЭП в вышеуказанном первом варианте реализации, датчик 130 тока КЭП может быть расположен на входной стороне источника 90 питания КЭП. В этом случае, когда величина определения от датчика 130 тока КЭП преобразуется в величину тока на входной стороне источника 90 питания КЭП с использованием напряжение коэффициента преобразования источника 90 питания КЭП, либо оценочная величины тока КЭП, которую вычисляют с использованием величины определения от датчика 120 тока, преобразуется в величину тока на выходной стороне источника 90 питания КЭП, величина определения может сравниваться с оценочной величиной.
[0111] В каждом из вышеуказанных вариантов реализации, гибридное транспортное средство 1 или 1А представляет собой гибридное транспортное средство с конфигурацией, в которой двигатель 10 и двигатели-генераторы 15 и 20 соединены устройством 25 деления мощности. Тем не менее, гибридные транспортные средства, к которым применимо данное изобретение, не ограничиваются гибридными транспортными средствами с такой конфигурацией. Например, это изобретение применимо к тому, что именуют серийным типом гибридного транспортного средства. Когда гибридное транспортное средство 1 или 1А представляет собой серийный тип гибридного транспортного средства, двигатель 10 используется только для запуска двигателя-генератора 15, и электроэнергия для движения транспортного средства генерируется только двигателем-генератором 20.
[0112] В то время как гибридное транспортное средство 1 или 1А представляет собой транспортное средство, которое включает в себя устройство 40 накапливания электроэнергии, которое может заряжаться извне от внешнего источника 200 питания, в каждом из описанных выше вариантов реализации, это изобретение также применимо к гибридным транспортным средствам без средств внешней зарядки (зарядного устройства 150 и секции 160 приемки электроэнергии). Режим РЗ и режим ПЗ предпочтительны для заряженных извне гибридных транспортных средств, но не обязательно ограничены заряжаемыми извне гибридными транспортными средствами.
[0113] В вышеизложенном, датчики 130 и 140 тока КЭП соответствуют одному примеру «первого датчика тока» в этом изобретении, а датчик 110 тока соответствует одному примеру «второго датчика тока», который определяет входной/выходной ток устройства накапливания электроэнергии в этом изобретении. Датчик 120 тока соответствуют одному примеру «второго датчика тока», который определяет ток, который подается из устройства накапливания электроэнергии на преобразователь в этом изобретении, а ЭБУ 100 и 100А соответствуют одному примеру «контроллера» в этом изобретении.
[0114] Должно быть понятно, что варианты реализации изобретения, которые раскрыты здесь, являются не ограничительными, а иллюстративными во всех аспектах. Объем изобретения определяется прилагаемой формулой, а не приведенным выше описанием вариантов реализации, и все изменения, которые производятся в рамках концепции и объема эквивалентов формулы изобретения охватываются ими.
Реферат
Изобретение относится к гибридному транспортному средству. Гибридное транспортное средство содержит устройство накопления электроэнергии; каталитическое устройство с электроподогревом, принимающее электроэнергию из устройства накапливания электроэнергии; первый датчик определения тока, который подается на каталитическое устройство с электроподогревом; второй датчик тока определения входного/выходного тока устройства накапливания электроэнергии. Контроллер управления определением неисправности оценивает ток, подаваемый на каталитическое устройство с электроподогревом с использованием величины определения второго датчика тока, и сравнивает оцениваемый ток с величиной определения первого датчика тока для определения того, имеется ли неисправность в первом датчике тока. Повышается надежность определения неисправности. 2 н. и 4 з.п. ф-лы, 10 ил.
Комментарии