Модульная система и способ обмена информацией и/или энергией между модулями модульной системы - RU2711951C2
Код документа: RU2711951C2
Чертежи

Описание
[001] Изобретение относится к модульной системе в соответствии с ограничительной частью пункта 1 формулы изобретения и способу информационного и/или энергетического обмена между модулями модульной системы в соответствии с ограничительной частью пункта 11 формулы изобретения.
[002] Модульные системы с комбинируемыми модулями используются во многих применениях, например, как игрушки, а также для создания сложных роботизированных систем для промышленных применений. Модули, таким образом, являются элементами модульной системы, которые обеспечивают одну или несколько функций. Модули могут быть предоставлены в виде энергетических модулей для обеспечения энергией устройства, которое формируется с помощью модулей модульной системы, модулей управления для управления функциями, приводных модулей для обеспечения по меньшей мере одной функции движения или манипуляции и модулей датчиков для предоставления по меньшей мере одного параметра для дальнейшей обработки и, при необходимости, управления конкретными функциями. Модуль может также объединять множественные функции, при этом, тем не менее, предпочтительным является выделение одной или максимум 2 функций на модуль.
[003] В документах WO 2011/089 109 A1 и WO 2014/032807 A1 описываются модульные системы с разными модулями, и также подробно описывается взаимодействие модулей.
[004] Для обеспечения конкретного информационного и/или энергетического обмена между модулями они механически соединяются друг с другом в определенной последовательности, при этом механическое соединение также обеспечивает передачу данных или энергии. Когда необходимо изменить передачу данных или энергии, необходимо выполнить изменение механической связи модулей друг с другом, что неудобно с одной стороны и с другой стороны занимает очень много времени.
[005] Целью настоящего изобретения является преодоление недостатков, описанных выше.
[006] Цель достигается посредством модульной системы по пункту 1 формулы изобретения, способа согласно изобретению для информационного и/или энергетического обмена между модулями модульной системы по пункту 11 формулы изобретения и компьютерного программного продукта согласно изобретению по пункту 13 формулы изобретения. Преимущественные варианты осуществления представлены в зависимых пунктах формулы изобретения и в описании.
[007] Авторы изобретения обнаружили, что цель может быть достигнута удивительно простым способом, если предоставляются устройства, которые при необходимости обеспечивают формирование перекрестных связей между модулями без необходимости физического изменения модулей. Таким образом, изменение положения модулей относительно друг друга или изменение механического соединения модулей не требуется, но при необходимости сохраняется предусмотренное механическое соединение модулей.
[008] «Комбинируемые модули» представляют собой, таким образом, модули, которые выбираются из ассортимента оборудования модульной системы, которая выполнена с возможностью формирования игрушки, промышленного робота или тому подобного. Эти модули могут быть соединены друг с другом механически (например, согласно инструкциям документа WO 2014/032807 A1), но они не требуют соединения. Модули также могут быть расположены в пространстве независимо друг от друга, где может быть предусмотрена радиосвязь для обмена информацией или энергией.
[009] «Модули» согласно настоящему изобретению представляют собой, в частности, энергетические модули, модули управления, приводные модули и модули датчиков, причем модули также могут сочетать несколько этих функций. Модули являются «активными» модулями и отличаются от «пассивных» модулей, таких как простые конструктивные модули, которые не обладают какой-либо другой функцией помимо передачи энергии и/или информации к активным модулям или между ними.
[0010] Таким образом, для информационного и/или энергетического обмена между собой могут быть взаимно соединены не только два активных модуля, а три или более модулей могут быть взаимно соединены друг с другом. Например, модуль датчиков может быть взаимно соединен с приводным модулем, два приводных модуля могут быть взаимно соединены с приводным модулем, модуль датчиков может быть взаимно соединен с двумя приводными модулями, модуль управления может быть взаимно соединен с модулем датчиков и/или приводным модулем или приводной модуль может быть взаимно соединен с другим приводным модулем без завершения данного списка.
[0011] Обмен энергией в контексте настоящего изобретения означает подачу энергии другим модулем.
[0012] «Обмен информацией» согласно настоящему изобретению представляет собой передачу или пересылку данных из первого модуля во второй модуль, при этом данные применяются для управления отдельными функциями второго модуля.
[0013] «Обмен» между двумя модулями в контексте настоящего изобретения относится не только к двунаправленному обмену, но также к однонаправленному обмену, который, таким образом, альтернативно передает и принимает или передает и принимает только в одном направлении. Этот обмен может выполняться непосредственно между связанными модулями, но также косвенно с помощью дополнительных элементов, подключенных между модулями.
[0014] «Взаимное соединение» в контексте настоящего изобретения означает обеспечение нового соединения или переключения существующего соединения, активного между двумя модулями, при этом посредством этого соединения может быть осуществлен обмен энергией или информацией.
[0015] Модульная система согласно настоящему изобретению по меньшей мере с двумя комбинируемыми модулями отличающаяся тем, что предусмотрены устройства, которые облегчают необязательное взаимное соединение первого модуля со вторым модулем, вследствие чего может быть обеспечено информационное и/или энергетическое соединение между первым и вторым модулем, вследствие чего модули выполнены с возможностью информационного или энергетического обмена, при этом взаимное соединение не включает никакие физические изменения модулей.
[0016] В преимущественном варианте осуществления предусмотрено, что модульная система содержит по меньшей мере три модуля, которые комбинируются друг с другом, при этом между двумя модулями предусмотрено первое информационное и/или энергетическое соединение, причем устройства выполнены с возможностью обеспечения дополнительного соединения в качестве альтернативы или в дополнение к первому информационному и/или энергетическому соединению. Устройства выполнены с возможностью обеспечения второго информационного и/или энергетического соединения между по меньшей мере двумя модулями без необходимости физического изменения модулей или информационного и/или энергетического соединения. Таким образом, существующие соединения могут быть заменены другими соединениями или в дополнение к существующим соединениям могут быть предусмотрены дополнительные соединения. Затем могут быть предусмотрены дополнительные соединения между модулями, которые до сих пор не были обеспечены взаимным соединением, или они существуют по меньшей мере между одним модулем, который до сих пор был обеспечен взаимным соединением, и другим модулем, который еще не был обеспечен взаимным соединением, или который был обеспечен взаимным соединением с другим модулем.
[0017] В преимущественном варианте осуществления предусмотрено, что каждый модуль имеет индикаторные устройства, имеющие по меньшей мере два состояния индикации, при этом модульная система выполнена с возможностью работы по меньшей мере в одном режиме работы модульной системы для указания взаимного соединения двух модулей посредством совпадающих состояний индикации соответствующих индикаторных устройств в модулях. Таким образом, можно очень просто проверить, установлено ли требуемое взаимное соединение без необходимости иметь определенные навыки программирования или конкретные топографические знания о точной конструкции устройства, созданного из модулей. Таким образом, индикаторные устройства предпочтительно выполнены в виде источников света, потому что тогда можно крайне быстро и надежно проверить, достигнуто ли требуемое взаимное соединение. Однако вместо этого или дополнительно в качестве индикаторных устройств могут применяться звуки, вибрации и тому подобное. Когда они являются источниками света, это дает преимущества, если источники света обладают разными цветовыми состояниями и/или светящимися формами, например цифрами, буквами и т.д. Потому что разные взаимные соединения довольно просто могут быть отличены друг от друга.
[0018] Термин «по меньшей мере в одном режиме работы» в контексте настоящего изобретения обозначает, что индикация отображается по меньшей мере в режиме выбора взаимных соединений. Индикация может продолжать отображаться, например, в режиме движения, но это не обязательно.
[0019] В преимущественном варианте осуществления предусмотрено, что модульная система приспособлена для назначения разного статуса индикации разным группам взаимно соединенных модулей по меньшей мере в одном режиме работы модульной системы, чтобы обеспечить дифференцирование модулей. Это способствует одновременному дифференцированию разных взаимных соединений и, таким образом, достижению корректной связи, как предполагалось.
[0020] В преимущественном варианте осуществления предусмотрено, что по меньшей мере два модуля содержат устройства активации, которые выполнены с возможностью обеспечения взаимного соединения между двумя модулями, когда работают их соответствующие устройства активации. Тогда взаимное соединение может быть осуществлено особенно простым и отслеживаемым образом. Например, это могут быть элементы активации, такие как переключатели или клавиши или подобные элементы, которые предусмотрены в каждом модуле. Однако также может быть дополнительно или альтернативно предусмотрено, что устройства активации расположены в центральных устройствах управления. Устройства активации преимущественно приспособлены для обеспечения взаимного соединения, когда они приводятся в действие, в частности, приводятся в действие одновременно.
[0021] В преимущественном варианте осуществления обеспечивается то, что модульная система содержит устройство управления, при этом устройство управления содержит блок отображения, который указывает выбранное взаимное соединение по меньшей мере в режиме работы модульной системы. Отображение такого типа может быть обеспечено, например, линиями и/или идентичными цветовыми тонами изображений модулей, отображающих отдельные модули.
[0022] В качестве альтернативы или дополнительно, предпочтительно, если система управления содержит по меньшей мере одно устройство управления, которое может назначаться конкретному модулю для управления этим конкретным модулем. Тогда система управления устройством фактически выполнена из модулей, чтобы быть выборочно адаптируемой. Например, устройство управления может быть горизонтальным или вертикальным ползунком, который задает заданную скорость вперед и назад при перемещении в прямом или обратном направлении или который задает угол поворота при перемещении влево или вправо. С другой стороны, могут применяться устройства управления, выполненные в виде джойстиков, которые могут, например, одновременно задавать скорость и рулевое отклонение. Эти устройства управления могут быть предоставлены физически или не физически, например в виде видимых изображений на сенсорной панели.
[0023] В качестве альтернативы или дополнительно для управления также может быть применен гироскопический элемент, при этом, например, наклон системы управления вперед и назад приводит к перемещению вперед или назад со скоростью, которая адаптирована как функция поворота, и поворот вправо или влево системы управления приводит к направлению движения вправо или влево с углом поворота, который адаптирован как функция поворота.
[0024] В преимущественном варианте осуществления предусмотрено, что блок отображения приспособлен по меньшей мере в одном режиме работы модульной системы отображать все модули, которые объединены друг с другом, в виде изображений модулей. Тогда систему управления можно сконфигурировать крайне просто.
[0025] Таким образом, система управления предпочтительно приспособлена для отображения параметров соединения объединенных модулей на блоке отображения, в частности в виде линий взаимных соединений между соответствующими изображениями модулей, при этом требуемые взаимные соединения могут быть созданы особенно простым и быстрым образом. Это может быть представлено, например, в матричной форме. Однако могут быть использованы другие подходящие графические схемы изображений модулей.
[0026] В качестве альтернативы или дополнительно система управления преимущественно приспособлена для предоставления изображениям модулей на блоке отображения состояния индикации, которое соответствует состоянию индикации модуля, представленного изображением модуля. Тогда можно очень просто и быстро отследить, какое взаимное соединение между этими модулями действительно было выполнено, и при необходимости они могут быть соединены очень быстро.
[0027] В преимущественном варианте осуществления предусмотрено, что устройство управления содержит индикаторное устройство по меньшей мере в одном режиме работы модульной системы, при этом состояние индикации индикаторного устройства соответствует состоянию индикации модуля, связанного с устройством управления, при этом блок отображения преимущественно приспособлен к блоку управления для представления индикаторного устройства. Это обеспечивает особенно простое отслеживание того, какой модуль фактически управляется устройством управления. Кроме того, эта связь устройства управления с конкретным модулем может быть легко изменена.
[0028] В преимущественном варианте осуществления предусмотрено, что система управления содержит блок ввода, при этом блок ввода приспособлен по меньшей мере в одном режиме работы модульной системы для представления требуемого взаимного соединения, корректируемого посредством выбора отображаемого варианта взаимного соединения. Таким образом, блок ввода преимущественно выполнен в виде блока отображения, выполненного в виде сенсорного экрана. Имеются преимущества, когда блок отображения выполнен с возможностью корректировки взаимного соединения при нажатии на линию взаимного соединения, например, пальцем или указателем мыши.
[0029] В преимущественном варианте осуществления предусмотрено, что все объединенные модули соединены с общей шиной данных, при этом каждый модуль имеет адрес устройства с целью идентификации. Тогда необязательным взаимным соединением можно крайне просто управлять. Таким образом, шина данных может быть обеспечена в виде проводной и/или беспроводной связи.
[0030] В независимом пункте формулы заявляется способ согласно настоящему изобретению для информационного и/или энергетического обмена между модулями модульной системы и по меньшей мере двумя модулями, которые объединены друг с другом, отличающийся тем, что предусмотрены устройства, которые обеспечивают необязательное взаимное соединение первого модуля со вторым модулем, чтобы между первым и вторым модулями устанавливалось информационное и/или энергетическое соединение, при этом модули могут осуществлять информационный и энергетический обмен, причем физическое изменение модулей не связано с взаимным соединением.
[0031] В преимущественном варианте осуществления предусмотрено, что применяется модульная система согласно изобретению.
[0032] Изобретение может быть дополнительно реализовано в виде компьютерного программного продукта, доступного с пригодного для использования компьютера или машиночитаемого носителя, и который предусматривает программный код для использования на или в сочетании с компьютером или системой выполнения команд. Таким образом, в независимом пункте формулы также заявляются компьютерные программные продукты для настоящего изобретения, которые хранятся на машиночитаемом носителе и которые включают машиночитаемые программные устройства, которые обуславливают выполнение компьютером способа согласно настоящему изобретению при реализации программных устройств на компьютере.
[0033] С целью этого применения пригодный для использования компьютер или машиночитаемый носитель могут представлять собой все приспособления или устройства, которые содержат, хранят, сообщают, распространяют или передают программу для использования системой выполнения команд или использования в сочетании с системой выполнения команд устройства или приспособлений. Соответственно, также могут применяться устройства мобильной связи, например мобильные телефоны, планшетные компьютеры и тому подобное.
[0034] Носителем может быть электронная, магнитная, оптическая, электромагнитная, инфракрасная или полупроводниковая система или устройство или приспособление или среда распространения. Варианты осуществления машиночитаемого носителя включают полупроводниковое или твердотельное запоминающее устройство или магнитную ленту, съемный компьютерный диск, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), постоянно установленный магнитный диск и оптический диск. Настоящие варианты осуществления оптических дисков включают компакт-диск для однократной записи данных (CD-ROM), компакт-диск с возможностью перезаписи (CDR-R/W) и DVD.
[0035] Система обработки данных, которая выполнена с возможностью хранения и/или выполнения программного кода, содержит по меньшей мере один процессор, который прямо или косвенно связан по меньшей мере с одним запоминающим элементом с помощью системной шины. Запоминающий элемент может включать локальное запоминающее устройство, которое становится активным во время текущего выполнения программного кода, массовое запоминающее устройство и буферное запоминающее устройство, которое обеспечивает временное хранение по меньшей мере нескольких программных кодов с целью уменьшения количества вызовов кода из массового запоминающего устройства во время выполнения.
[0036] Устройства ввода/вывода или I/O, которые могут включать клавиатуру, дисплеи, указывающие устройства и т.д., но без ограничения, могут быть соединены с системой либо непосредственно, либо с помощью контроллера ввода/вывода, подключенного между ними.
[0037] Сетевые адаптеры также могут быть подключены к системе, чтобы облегчить соединение системы обработки данных с другими системами обработки данных, или удаленными принтерами, или запоминающими устройствами через частные или общедоступные сети, подключенные между ними. Кабельные модемы или карты Ethernet в этом контексте представляют собой лишь несколько вариантов осуществления существующих типов сетевых адаптеров.
[0038] Кроме того, в независимом пункте формулы заявляется независимо от описанного подтверждения модульная система согласно настоящему изобретению или способ согласно настоящему изобретению для типа передачи информации или передачи энергии посредством скользящих контактов, при этом предусмотрен по меньшей мере один кольцевой скользящий контакт, который контактирует по меньшей мере с одним контактным элементом, при этом скользящий контакт содержит по меньшей мере 2 части, которые электрически изолированы друг от друга в направлении по окружности. Таким образом, обратное движение информации или энергии может быть обеспечено крайне просто без необходимости перепрограммирования.
[0039] В преимущественном варианте осуществления предусмотрено, что по меньшей мере одна токонепроводящая часть расположена в направлении по окружности между 2 токопроводящими частями скользящего контакта. Тогда смена полярности или короткое замыкание могут быть предотвращены.
[0040] В преимущественном варианте осуществления предусмотрено, что токоведущие части скользящего контакта расположены так, что контакт с соответствующими контактными элементами, которые преимущественно выполнены в виде штыревых контактов, возможен только при предварительном контакте частей без тока. Это эффективно предотвращает преимущественные контактные всплески напряжения.
[0041] В преимущественном варианте осуществления предусмотрено, что скользящие контакты и контактирующие элементы объединены с механическими соединительными элементами модулей.
[0042] В преимущественном варианте осуществления предусмотрено, что механические соединительные элементы обеспечивают соединение и взаимное сцепление соединительных элементов, в частности, только при взаимной ориентации соединяемых модулей.
[0043] В преимущественном варианте осуществления предусмотрено, что соединение возможно только при ориентации модулей относительно друг друга, когда контактирующие элементы входят в плотный контакт с частями без тока, и/или обеспечивают взаимное сцепление только при ориентации модулей относительно друг друга, при которой контактирующие элементы входят в плотный контакт с частями без тока.
[0044] С этой целью преимущественным образом предусмотрены механически взаимно сцепляющие устройства, которые предотвращают прямой контакт токопроводящей части скользящего контакта с соответствующими контактными элементами без контактирования с токонепроводящими частями.
[0045] Далее описываются признаки и дополнительные преимущества настоящего изобретения на основе преимущественных вариантов осуществления со ссылкой на графические материалы, на которых:
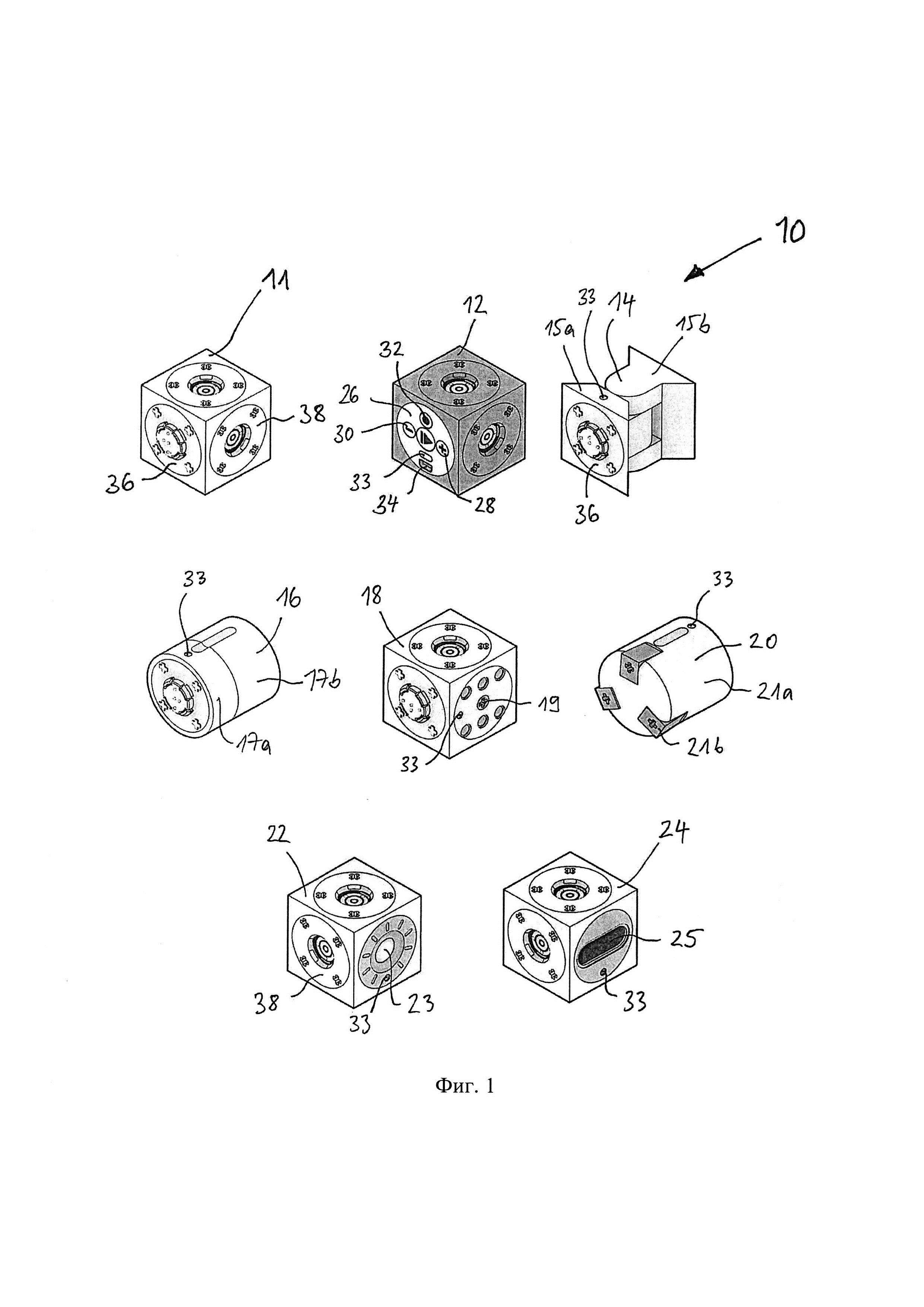
[0046] на фиг. 1 показаны разные модули модульной системы согласно изобретению;
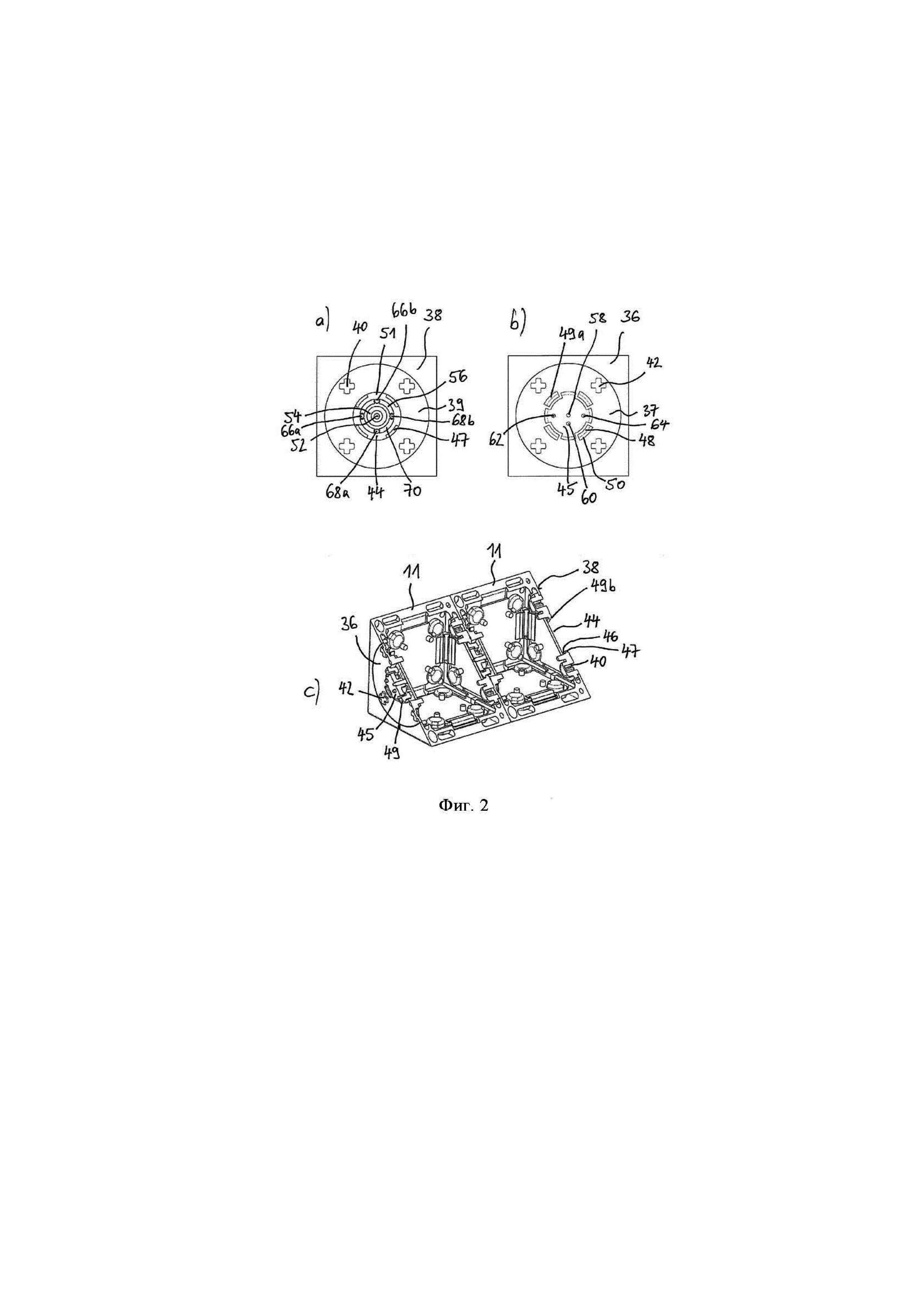
[0047] на фиг. 2a, b, c показаны штыревые и гнездовые соединительные поверхности модулей модульной системы согласно изобретению согласно фиг. 1;
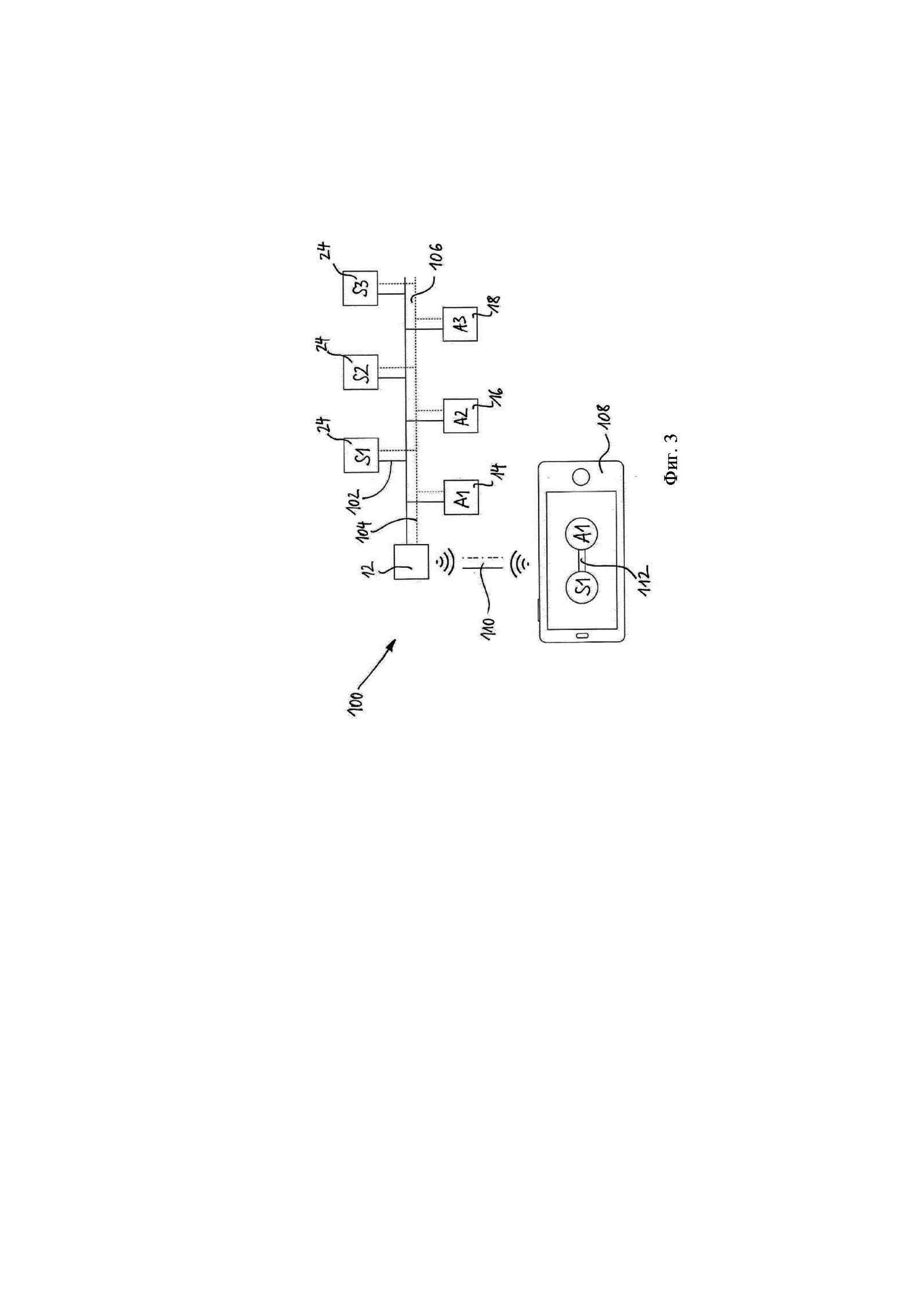
[0048] на фиг. 3 показан первый схематический вариант осуществления устройства, выполненного из объединенных модулей модульной системы согласно изобретению;
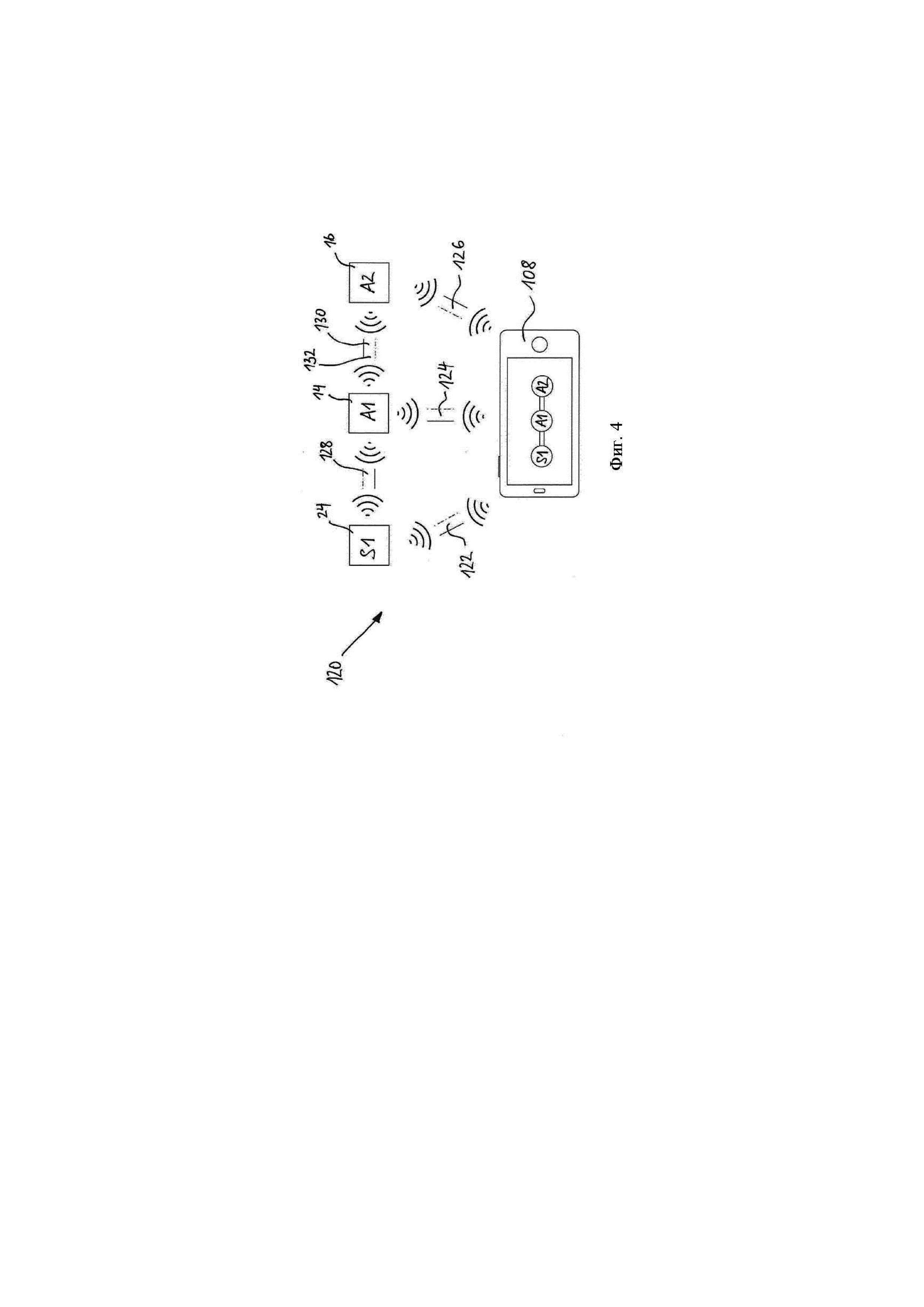
[0049] на фиг. 4 показан второй схематический вариант осуществления устройства, собранного из объединенных модулей модульной системы согласно изобретению;
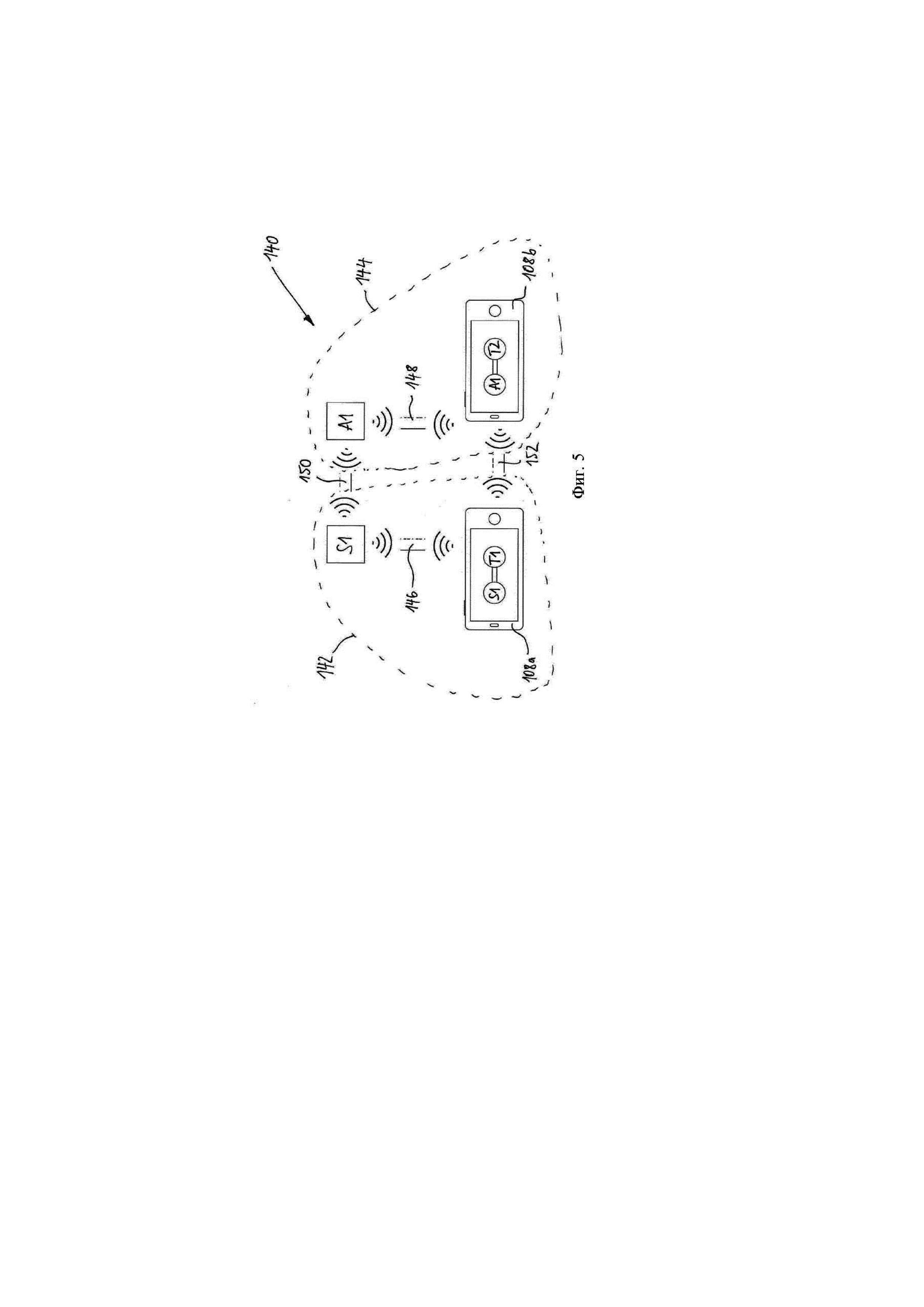
[0050] на фиг. 5 показан третий схематический вариант осуществления устройства, собранного из объединенных модулей модульной системы согласно изобретению;
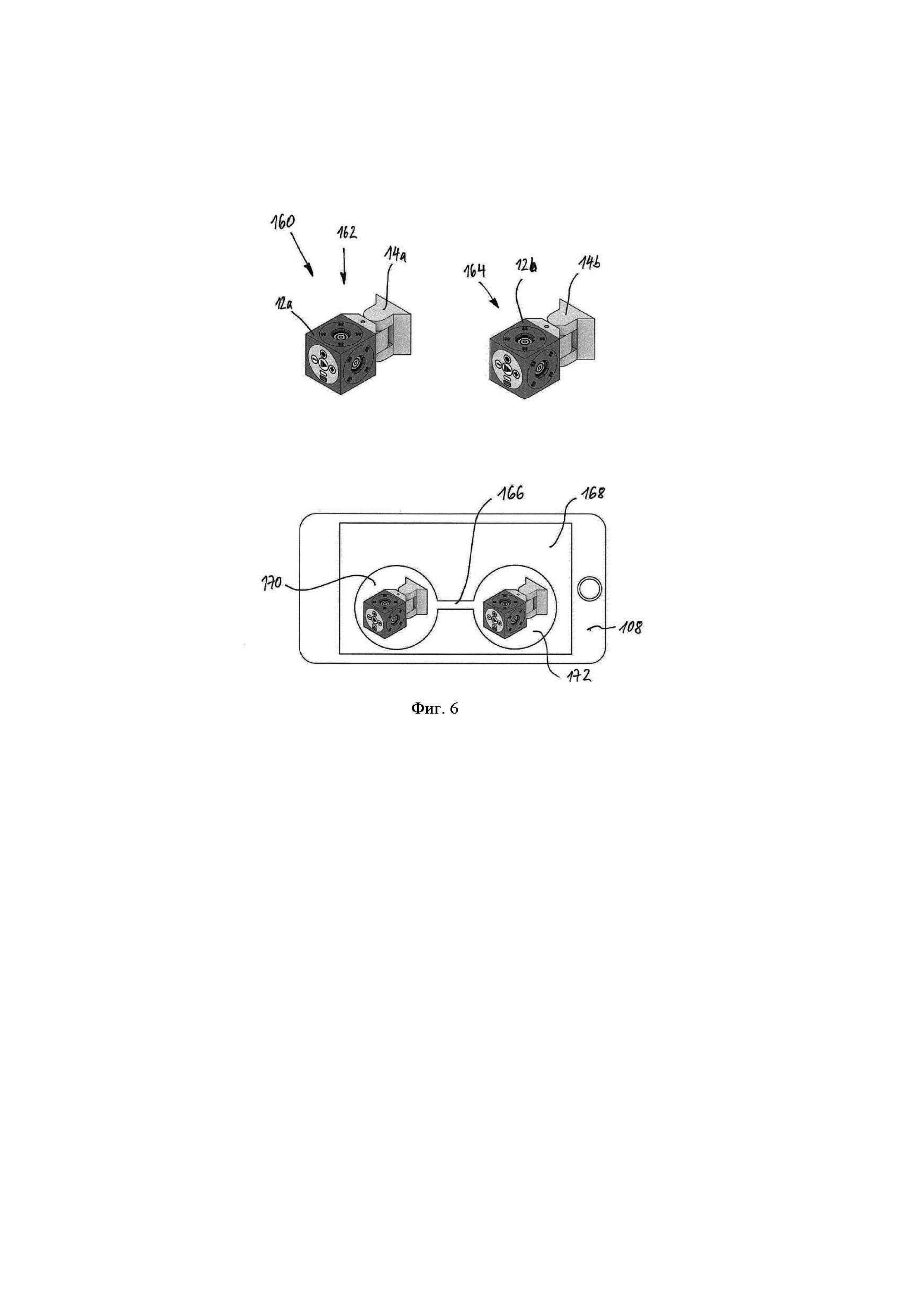
[0051] на фиг. 6 показан четвертый вариант осуществления устройства, собранного из объединенных модулей модульной системы согласно изобретению;
[0052] на фиг. 7 показан пятый вариант осуществления устройства, собранного из объединенных модулей модульной системы согласно изобретению;
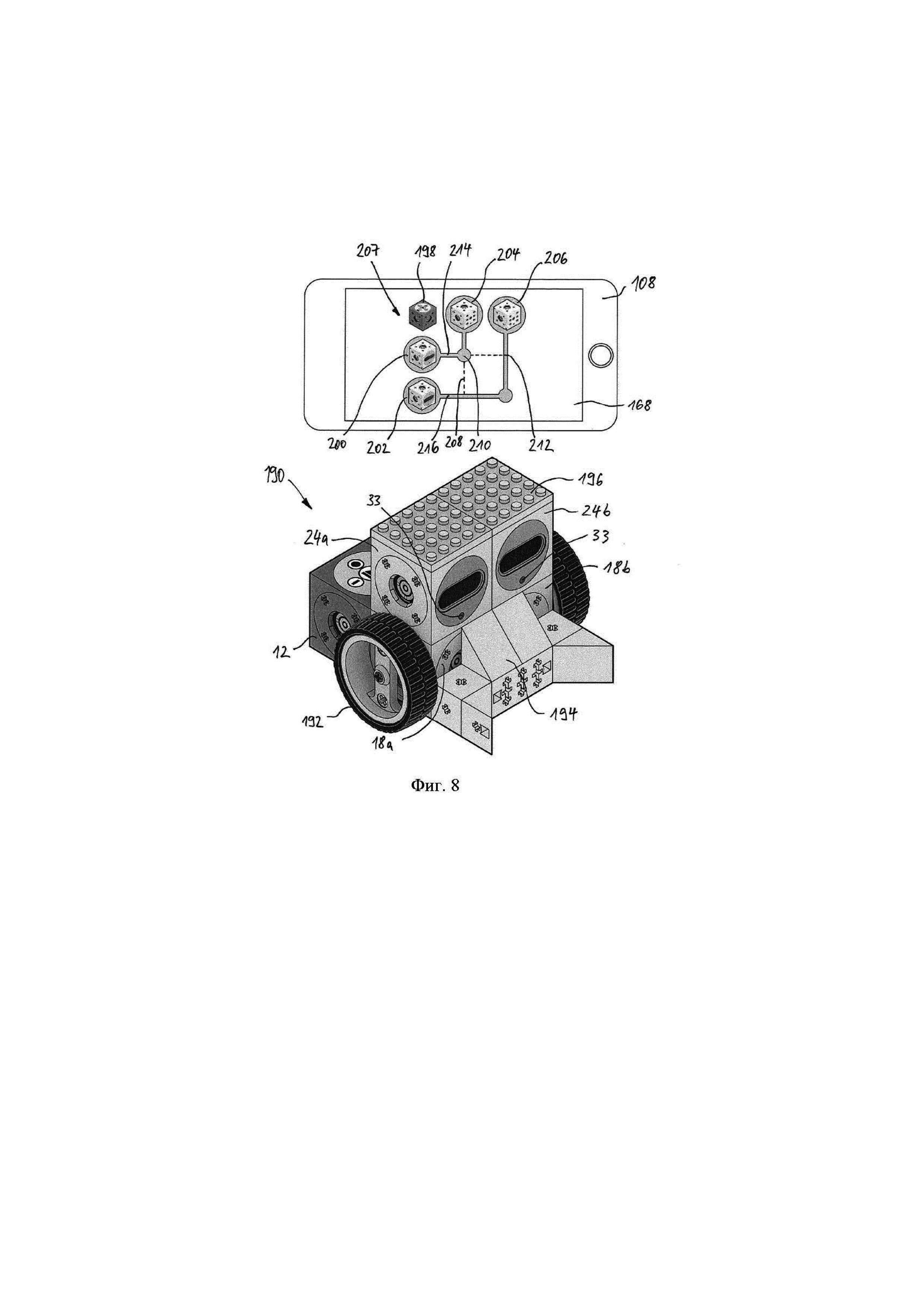
[0053] на фиг. 8 показан шестой вариант осуществления устройства, собранного из объединенных модулей модульной системы согласно изобретению в режиме взаимного соединения;
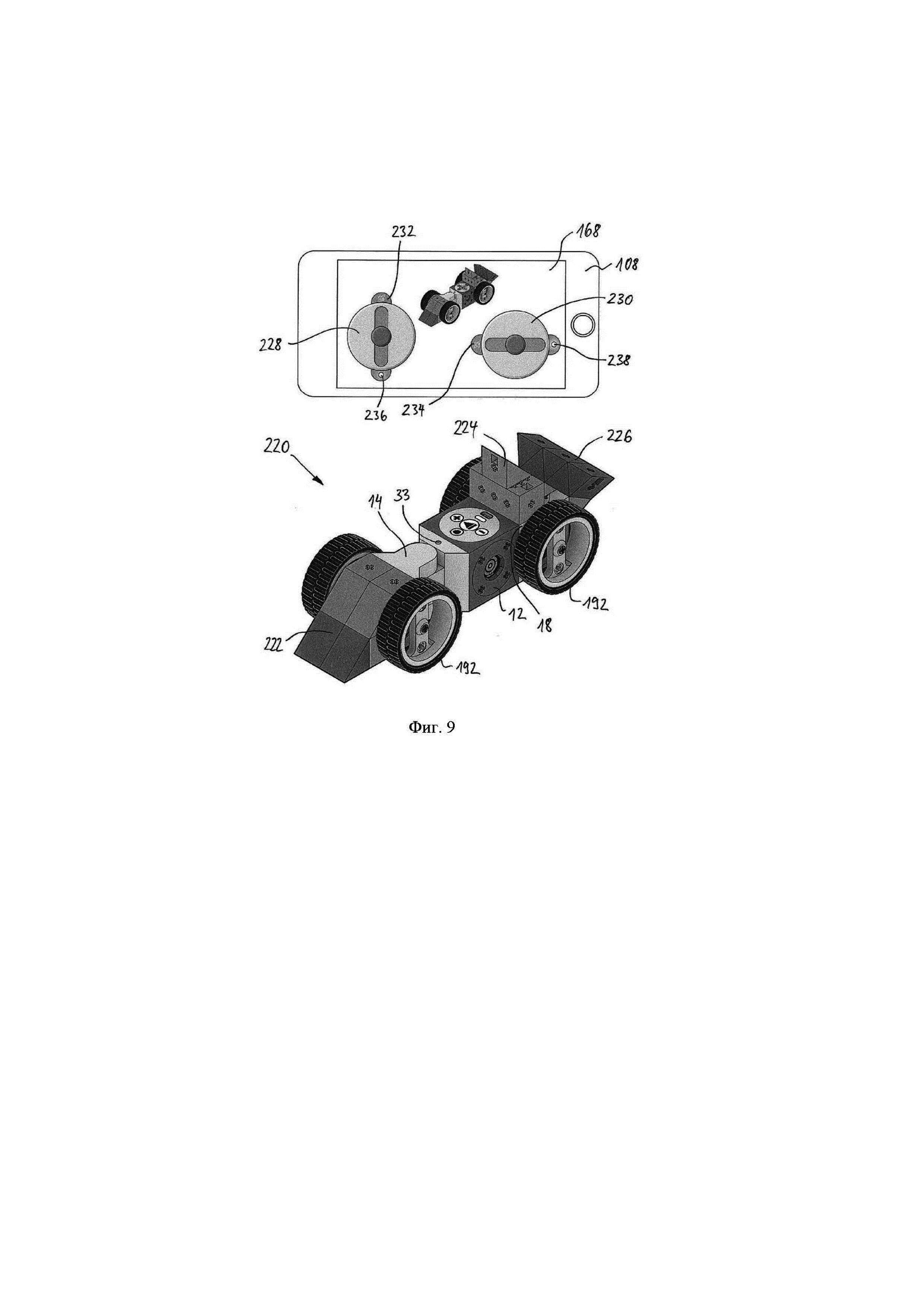
[0054] на фиг. 9 показан седьмой вариант осуществления устройства, собранного из объединенных модулей модульной системы согласно изобретению в режиме управления; и
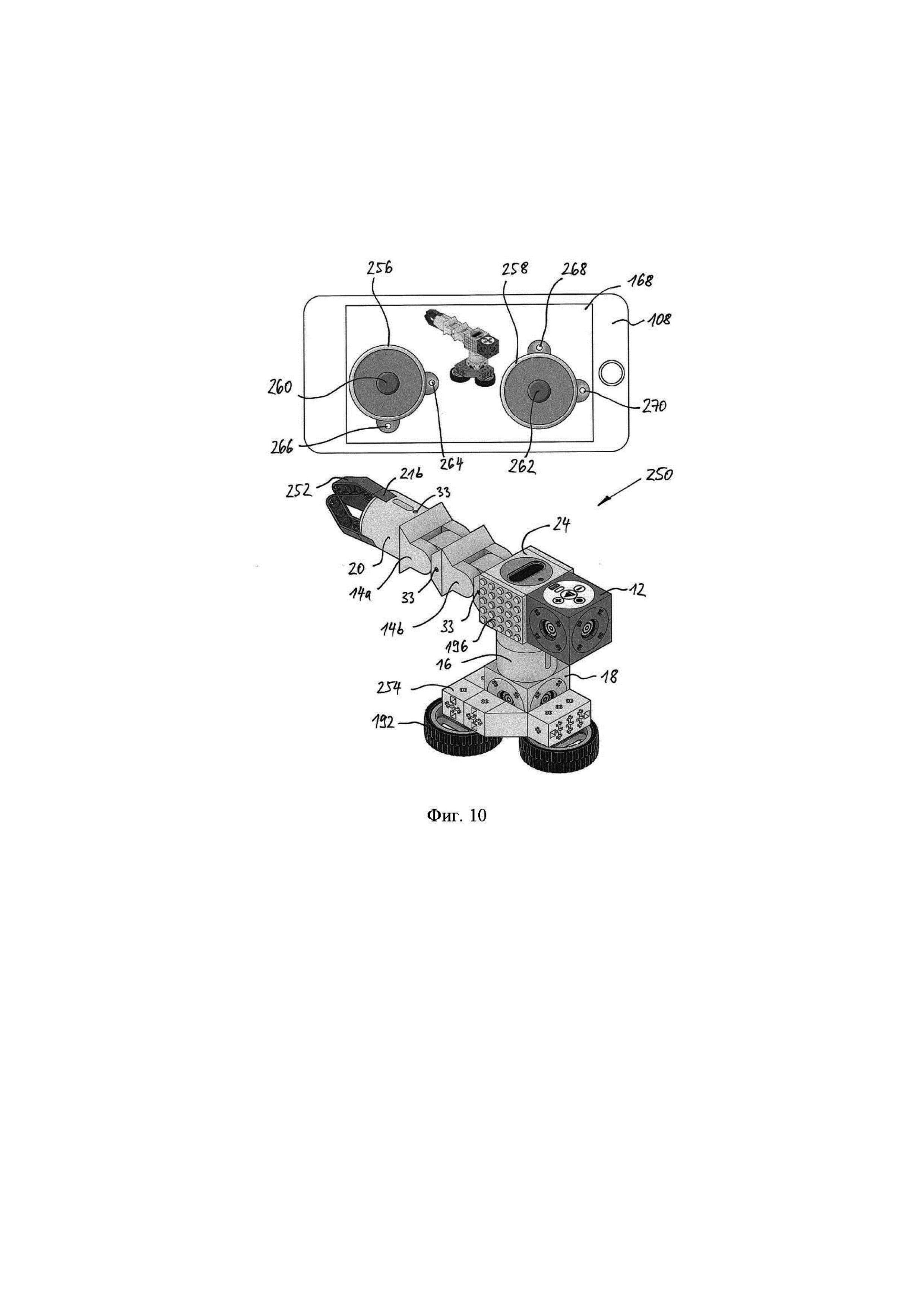
[0055] на фиг. 10 показан восьмой вариант осуществления устройства, собранного из объединенных модулей модульной системы в режиме управления.
[0056] На фиг. 1 показан преимущественный вариант осуществления модульной системы 10 согласно изобретению, который преимущественно содержит по меньшей мере один модуль из множества показанных активных модулей 12, 14, 16, 18, 20, 22, 24 в дополнение к пассивному конструктивному модулю, который просто обеспечивает сквозное прохождение сигнала.
[0057] Модули 12, 14, 16, 18, 20, 22, 24 содержат модуль 12 управления, который содержит запатентованный надлежащий источник энергии и механически соединенные модули, соединительный модуль 14 с двумя компонентами 15a, 15b, которые могут поворачиваться относительно друг друга. Модуль 16 вращения с двумя компонентами 17а, 17b, которые могут вращаться относительно друг друга посредством двигателя, который не показан, приводной модуль 18 с осью 19, который приводится в движение двигателем (не показан), захватный модуль 20 с 3 манипуляторами 21b, которые одновременно могут поворачиваться посредством двигателя (не показан) относительно основания базового элемента (21а), световой модуль 22 со светочувствительным элементом 23 и инфракрасный модуль 24 с инфракрасным сенсорным элементом 25.
[0058] Модуль 12 управления содержит пульт 26 управления оператора с клавишей 28 «+» и клавишей 30 «-» для увеличения или уменьшения конкретных команд управления, клавишу 32 приемника, светящийся индикатор 33, который может отображать различные цвета, мини-USB-соединение 34 для управляемого программирования и зарядки источника энергии модуля 12 управления с помощью внешнего компьютера или тому подобного и комбинированную клавишу 35 воспроизведения и паузы для воспроизведения или приостановки определенных запрограммированных функций.
[0059] Модули 12, 14, 16, 18, 20, 22, 24 содержат различные соединительные поверхности 36, 38, при этом каждый модуль 12, 14, 16, 18, 20, 22, 24 содержит по меньшей мере одну штыревую соединительную поверхность 36 и по меньшей мере одну гнездовую соединительную поверхность 38, которые обеспечивают соединение отдельных модулей 12, 14, 16, 18, 20, 22, 24 друг с другом.
[0060] Кроме того, модули 12, 14, 16, 18, 20, 22, 24 содержат световые индикаторы 33, подобно модулю 12 управления, которые могут соответственно отображать разные цвета, которые могут совпадать друг с другом, например белый, желтый, красный, зеленый и синий.
[0061] На фиг. 2а и 2b штыревая соединительная поверхность 36 с ее опорной поверхностью 37 и гнездовая соединительная поверхность 38 с ее опорной поверхностью 39 сопоставлены друг с другом.
[0062] На фиг. 2с показан вид в разрезе двух пассивных конструктивных модулей 11, которые соединены и сцеплены друг с другом.
[0063] Очевидно, что гнездовая соединительная поверхность 38 содержит крестообразные углубления 40, которые соответствуют 45º, 135º, 225º, 315º. Еще одно воплощение изобретения более подробно проиллюстрировано на фиг. 2–11. Идентичные или аналогичные компоненты предусматривают крестообразные выступы 42, которые соответствуют штыревой соединительной поверхности 36. Кроме того, гнездовая соединительная поверхность 38 содержит по существу круглое углубление 44, которое соответствует по существу круглому выступу 45 штыревой соединительной поверхности 36, при этом гнездовая соединительная поверхность содержит подрезы 46, которые расположены по диагонали напротив друг друга под выступами 47, в которых подрезы 46 соответствуют штырям 48, которые расположены по диагонали напротив подрезов 46 и содержат скосы 49a на верхних сторонах и выступы 50, которые расположены на радиальной наружной стороне. Этот скос 49a соответствует скосу 49b на выступе 47 гнездовой соединительной поверхности 38.
[0064] Штыри 48 со своими выступами 50 могут сцепляться при помощи точно выровненной вставки штыревой соединительной поверхности 36 в гнездовую соединительную поверхность 38, при этом штыри 48 могут отходить радиально внутрь вследствие определенной эластичности.
[0065] Точнее говоря, части 51, расположенные между выступами 47, имеют габаритную ширину в направлении по окружности, габаритная ширина имеет по меньшей мере такой же размер, как и расширение выступов 50 штырей 48, при этом штыревые соединительные поверхности 36 и гнездовые соединительные поверхности 38 защищены друг от друга в положении, когда они повернуты относительно друг друга на 45º, 135º, 225º, 315º.
[0066] Вращение штыревой соединительной поверхности 36 и гнездовой соединительной поверхности 38 относительно друг друга по часовой стрелке или против часовой стрелки отталкивает выступ 50 от штыря 48, чтобы войти в зацепление под выступом 47 в выемке 44, где штырь 48 упруго изогнут радиально обратно. Таким образом, выступ 47, а также выступ 50 выполнены закругленными на своих противоположных поверхностях. Кроме того, соответствующие угловые части могут быть слегка скошены, чтобы облегчить взаимное сцепление.
[0067] Когда штыревая соединительная поверхность 36 и гнездовая соединительная поверхность 38 повернуты относительно друг друга точно на 45 градусов, ввиду этого они могут иметь положение 0 градусов, 90 градусов, 180 градусов или 270 градусов относительно друг друга, крестообразные выступы 42 могут проникать в соответствующие крестообразные выемки 40, вследствие чего штыревая соединительная поверхность 36 может проникать достаточно глубоко в гнездовую соединительную поверхность 38 до их соответствующих опорных поверхностей 37, 39. Затем штыри 48 могут упруго отклоняться назад в свои нормальные положения, и соответствующие выступы 50 штырей 48 непосредственно контактируют с соответствующими выступами 47 в выемке 44, вследствие чего штыревая соединительная поверхность 36 и гнездовая соединительная поверхность 38 прочно взаимно сцеплены друг с другом. Расцепление может выполняться только путем другого поворота штыревой соединительной поверхности 36 и гнездовой соединительной поверхности 38 относительно друг друга на 45º, 135º, 225º, 315º.
[0068] В качестве альтернативы, когда все должно происходить быстро, непосредственное взаимное сцепление штыревой соединительной поверхности 36 и гнездовой соединительной поверхности 38 также может выполняться во взаимно выровненном состоянии 0º, 90º, 180º и 270º. Поскольку выступы 50 штырей 48 из-за скосов 49 под давлением соответствующих выступов 47 в выемках 44 вызывают смещение штырей 48 радиально внутрь, пока опорные поверхности 37, 39 не соприкасаются друг с другом, и штыри могут упруго вернуться назад в их нормальные положения, где, в свою очередь, соответствующие выступы 50 штырей 48 непосредственно контактируют с соответствующими выступами 47 в выемке 44, вследствие чего штыревая соединительная поверхность 36 и гнездовая соединительная поверхность 38 прочно сцеплены друг с другом. Если должно быть предотвращено взаимное сцепление под давлением, должны быть предусмотрены скосы.
[0069] Кроме того, очевидно, что штыревая соединительная поверхность 36 и гнездовая соединительная поверхность 38 непрерывно вращаются относительно друг друга с опорными поверхностями 37, 39, прикладывающими давление друг к другу без разъединения, при этом выступы 42 функционируют в целом как сцепляющая опора или расцепляющая опора.
[0070] Кроме того, из фиг. 2a, b, c видно, что штыревая соединительная поверхность 36 и гнездовая соединительная поверхность 38 не только обуславливают механическое соединение соответствующих модулей, но также обеспечивают передачу энергии и данных через контактные кольца 52, 54, 56 в гнездовой соединительной поверхности 38 и соответствующие контактные штыри 58, 60, 62, 64 во всех положениях взаимного сцепления.
[0071] Точнее говоря, внутреннее круглое контактное кольцо 52 и наиболее близкое концентрическое и круговое контактное кольцо 54 вместе с соответствующим внутренним контактным штырем 58 и соседним контактным штырем 60 обеспечивают первый и второй проводник последовательных данных, которые предоставлены параллельно во всех соответствующих контактных кольцах 52, 54 и контактных штырях 58, 60 модуля 11, 12, 14, 16, 18, 20, 22, 24 и проходят через все модули. Соответствующие контактные штыри 58, 60, 62, 64 соответственно подпружинены, вследствие чего обеспечивается безопасный контакт в сцепленном состоянии штыревой соединительной поверхности 36 и гнездовой соединительной поверхности 38 в соответствующих контактных кольцах.
[0072] Наружное контактное кольцо 56 выполнено соответственно из четырех горизонтально или вертикально противоположных контактных точек 66a, 66b, 68a, 68b, и частей 70, расположенных между ними, которые изолированы от контактных точек 66a, 66b, 68a, 68b, но соединены друг с другом. На противоположные контактные точки 66a, 66b, 68a, 68b соответственно подается противоположное напряжение постоянного тока (например, «+» полюсы 66a, 66b и «-:» полюсы 68a, 68b), и противоположные контактные точки 62, 64 связаны с ними. В частях 70 соответственно ток отсутствует. Таким образом, предотвращаются изменение полярности и короткое замыкание. С другой стороны, вращение штыревой соединительной поверхности 36 по отношению к гнездовой соединительной поверхности 38, может обеспечивать изменение полярности и, следовательно, изменение направления вращения без специального перепрограммирования.
[0073] Токонепроводящие части 70, в свою очередь, эффективно предотвращают контактные всплески напряжения. Таким образом, это достигается размещением сцепляющих устройств 40, 42, 47, 50, чтобы контактные штыри 62, 64 могли контактировать с контактным кольцом 56 в первый раз, только когда они попадают на токонепроводящие части 70, и контактирование контактных точек 66a, 66b, 68a, 68b осуществляется только после предварительного контакта токонепроводящих частей 70 и последующего вращения для обеспечения сцепления.
[0074] На фиг. 3 схематично показан первый вариант осуществления устройства 100, который собран из объединенных модулей 12, 14, 16, 18, 20, 22, 24 модульной системы 10 согласно изобретению. Модули 12, 14, 16, 18, 20, 24 соответственно механически соединены друг с другом своей штыревой соединительной поверхностью 36 и гнездовой соединительной поверхностью 38, при этом также предусмотрены два проводника 102, 104 последовательных данных в дополнение к прохождению через источник энергии, при этом 2 проводника последовательных данных образуют непрерывную шину 106 данных, которая проходит через все модули 12, 14, 16, 20, 24.
[0075] Модуль 12 управления содержит блок беспроводной локальной сети (WLAN) (не показан), который может связываться с блоком WLAN (не показан) устройства 108 управления, выполненного в виде смартфона, который способен обеспечивать непосредственное программирование элемента 12 управления и дополнительно шины 106 данных через устройство 108 управления. Вместо показанного смартфона 108 также можно применять любое другое подходящее устройство управления, например компьютер, планшетный компьютер или тому подобное, при этом вместо радиосвязи 110 также может применяться проводная связь через интерфейс 34 USB.
[0076] Чтобы организовать требуемое взаимное соединение между первым инфракрасным (IR) модулем 24 (S1) и первым приводным модулем 14 (A1), взаимное соединение 112 выбирается на устройстве 108 управления и передается в модуль 12 управления. Затем модуль 12 управления выдает адреса блоков, например, в виде MAC-адресов, и программирует шину 106 данных, вследствие чего только первый приводной модуль 14 (А1) реагирует в отношении управления на сигнал датчика первого инфракрасного (IR) модуля 24 (S1), при этом другие модули не реагируют на этот сигнал датчика.
[0077] На фиг. 4 схематично показан второй вариант осуществления устройства 120, выполненного из объединенных модулей 14, 16, 24 модульной системы 10 согласно изобретению.
[0078] Очевидно, что каждый модуль 14, 16, 24, а также устройство 108 управления содержат блоки WLAN (не показаны), которые облегчают радиальную связь 122, 124, 126 между устройством 108 управления и отдельными модулями 14, 16, 24, а также модулей 14, 16, 26 между собой 128, 130.
[0079] С помощью программирования посредством устройства 108 управления модули 14, 16, 24 получают команду организовать радиальную шину 132 данных между собой, которая основана на радиосвязи 128, 130 между модулями 14, 16, 24, вследствие чего приводные модули 14 (A1), 16 (A2) взаимно соединены с инфракрасным (IR) модулем 24 (S1), вследствие чего их управление основано на параметрах, подаваемых инфракрасным (IR) модулем 24 (S1).
[0080] На фиг. 5 схематично показан третий вариант осуществления устройства 140, собранного из объединенных модулей 14, 24 модульной системы согласно изобретению.
[0081] Очевидно, что предусмотрены два элемента 142, 144 устройства, а именно инфракрасный (IR) модуль 24 (S1), который соединен с первым устройством 108a управления (T1), и приводной модуль 16 (A1), который соединен со вторым устройством 108b (T2) управления. Соответствующее соединение 146, 148, в свою очередь, основано на беспроводной локальной сети (WLAN). Затем взаимное соединение модуля 16, 24 может быть осуществлено непосредственно через 150 или через 152 посредством соответствующих устройств 108a, 108b управления для обмена данными.
[0082] На фиг. 6 схематично показан четвертый вариант осуществления устройства 160, собранного из объединенных модулей 12а, 12b, 14а, 14b модульной системы согласно изобретению.
[0083] Очевидно, что устройство 160 содержит два элемента 162, 164 устройства, которые соответственно содержат модуль 12a, 12b управления и соединительный модуль 14a, 14b, механически соединенный с ним с помощью устройства 108 управления, причем два элемента 162, 164 устройства соединены друг с другом с помощью элементов WLAN (не показаны) модулей 12а, 12b управления, чтобы они могли обмениваться данными. Взаимное соединение 166 отображается на элементе 168 отображения устройства 108 управления между изображениями 170, 172 модулей, представляющих элементы 162, 164 устройства.
[0084] Во время взаимного соединения 166 было выполнено программирование, вследствие чего механическое перемещение соединительного модуля 14a первого элемента 162 устройства рукой пользователя (не показана) автоматически синхронно перемещает соединительный модуль 14b другого элемента 164 устройства.
[0085] Следует понимать, что устройство управления в этом варианте осуществления, но также и в других вариантах осуществления, как правило, применяется только для настройки взаимного соединения, чтобы устройство впоследствии независимо осуществляло запрограммированные этапы с применением взаимных соединений, не требуя отдельных команд через устройства управления такого типа. Эти команды обеспечивают необходимые взаимные соединения через предоставленные модули или собственный модуль управления в устройствах. Однако, как описано, некоторые управляющие команды могут передаваться через устройство управления, чтобы непосредственно управлять приводом и рулевым механизмом.
[0086] На фиг. 7 схематично показан пятый вариант осуществления устройства 180, собранного из объединенных модулей 14а, 14b модульной системы 10 согласно изобретению. Это альтернатива варианту осуществления, показанному на фиг. 6, где не используются запатентованные модули 12a, 12b управления. Вместо этого поворотные соединительные модули 14а, 14b уже содержат все необходимые блоки, такие как источник энергии, блок управления и радиоблок.
[0087] На фиг. 8 схематично показан шестой вариант осуществления устройства 190, собранного из объединенных модулей 12, 18а, 18b, 24а, 24b модульной системы 10 согласно изобретению в соединенном виде.
[0088] Очевидно, что устройство 190 также содержит формообразующие или образующие конструкцию блоки 194 в дополнение к двум колесам 192, которые приводятся в движение осями 19 приводных модулей 18а, 18b, при этом конструктивные элементы образуют тип ползуна, и устройство 190 дополнительно содержит переходные структурные блоки 196, посредством которых устройство 190 может быть дополнено компонентами, изготовленными из известных других модульных систем.
[0089] Все модули 12, 18а, 18b, 24a, 24b, в свою очередь, формируют шину данных (не показана) через соответствующие штыревые соединительные поверхности 36 и гнездовую соединительную поверхность 38, которые соединены друг с другом.
[0090] На дисплее 168 устройства 108 управления модули 12, 18a, 18b 24a, 24b, которые связаны с устройством 190 в режиме взаимного соединения, отображаются в таблице, то есть в матрице, соответствующими изображениями 198, 200, 202, 204 модуля. Поскольку в этом варианте осуществления только один инфракрасный (IR) модуль 24а, 24b должен быть соединен с приводными модулями 18а, 18b, таблица 207 содержит проведенные линии 208 взаимных соединений, отображающие основные варианты взаимных соединений. Нажатие одной точки 210 пересечения линий 208 взаимных соединений, в свою очередь, определит взаимное соединение инфракрасного (IR) модуля 24a с приводным модулем 18a, а с другой стороны – взаимное соединение инфракрасного (IR) модуля 24b с приводным модулем 18b, которое было передано через устройство 108 управления в модуль 12 управления и, таким образом, запрограммировано в устройстве 190.
[0091] Чтобы облегчить нажатие, блок 168 отображения выполнен в виде сенсорного экрана. В качестве альтернативы может быть осуществлен другой выбор, например, с помощью элемента мыши или тому подобного.
[0092] Каждый этап взаимного соединения был подтвержден командой подтверждения, чтобы завершить этап взаимного соединения. Например, можно было бы также взаимно соединить с инфракрасным (IR) модулем 24a оба приводных модуля обеих точек 210, 212 пересечения, которые были нажаты, и только после этого взаимное соединение было завершено командой подтверждения.
[0093] Выбранные и запрограммированные взаимные соединения показаны, с одной стороны, сплошными линиями 214 и 216, а с другой стороны, также идентичными цветами взаимно соединенных модулей 18a, 18b, 24a, 24b, причем два разных взаимных соединения 214, 216 соответственно также включают разные цвета, например красный и зеленый.
[0094] Для того чтобы выбранные взаимные соединения могли быть обнаружены также непосредственно в устройстве 190 и чтобы неправильные соединения сразу же могли быть исправлены, источники света 33 соответствующих взаимно соединенных модулей 18a, 18b, 24a, 24b светятся одинаковым цветом, который отображается для соответствующего взаимного соединения 214, 216 и соответствующего изображения 198, 200, 202, 204, 206 модуля.
[0095] Оба колеса 192, таким образом, приводятся в движение соответствующими приводными модулями 18а, 18b, которые обеспечивают непосредственное рулевое управление. Таким образом, также учитываются параметры датчиков соответственно взаимно соединенных инфракрасных (IR) модулей 24а, 24b, которые управляют транспортным средством 190, вследствие чего, например, шарики автоматически захватываются и перемещаются с помощью ползуна 194.
[0096] Используя блок датчиков, который содержит гироскопический блок, дополнительная балансировка всего устройства 190 обеспечивается таким образом, чтобы транспортное средство 190 всегда было ориентировано вертикально.
[0097] Вместо этого матричного представления изображений 198, 200, 202, 204, 206 модулей и линий взаимных соединений могут быть использованы и другие подходящие формы представления.
[0098] На фиг. 9 схематично показан седьмой вариант осуществления устройства 220, собранного из объединенных модулей 12, 14, 18, модульной системы 10 в режиме управления.
[0099] Очевидно, что устройство 220 представляет собой дистанционно управляемый автомобиль, который содержит модуль 12 управления, поворотный соединительный модуль 14, соединенный с ним для рулевого управления, и приводной модуль 18, соединенный посредством модуля 12 рулевого управления с поворотным соединительным модулем 14, выполненным с возможностью приведения в движение двух колес 192, и множество формообразующих или образующих конструкцию блоков 222, 224, 226.
[00100] В отличие от устройства 190 согласно фиг. 8 привод обеспечивается приводным модулем 18 синхронно на оба колеса 192, и отдельно обеспечивается рулевое управление посредством поворотного соединительного модуля 14, на котором два колеса 192 поддерживаются независимо друг от друга с помощью функции свободного хода конструктивными элементами 222.
[00101] Таким образом, режим взаимного соединения завершается, и блок 168 отображения системы 108 управления отображает режим управления. Таким образом, предусмотрены два элемента 228, 230 управления, которые выполнены в виде ползунковых управляющих объектов с центральным положением.
[00102] Вертикальный управляющий ползунок 228 управляет приводным модулем 18, при этом сдвиг ползунка вверх управляет скоростью движения вперед, и сдвиг ползунка вниз управляет скоростью движения назад. В качестве альтернативы могла бы быть использована посредством клавиши 232 гироскопическая функция системы 108 управления, чтобы заменить приведение в движение управляющего ползунка 228 поворотом системы 108 управления вперед и назад.
[00103] Горизонтальный управляющий ползунок 230 управляет поворотным соединительным модулем 14, при этом сдвиг ползунка вправо управляет углом поворота вправо, а сдвиг ползунка влево управляет углом поворота влево. В качестве альтернативы может быть использована посредством клавиши 234 гироскопическая функция системы 108 управления, чтобы заменить приведение в движение управляющего ползунка 230 поворотом системы 108 управления вправо и влево.
[00104] Чтобы лучше отслеживать связь управляющих объектов 228, 230 с соответствующими управляемыми модулями 14, 18, каждый управляющий объект 228, 230 содержит индикаторное устройство, выполненное в виде светящихся точек 236, 238, которые принимают одинаковый цвет свечения, что и соответствующие источники света 33 управляемых модулей 14, 18.
[00105] Эта связь может быть автоматически предложена пользователю посредством системы 108 управления. Однако также может быть выполнена связь в ручном режиме, в частности, при условии, что связь может быть скорректирована позже, если это необходимо.
[00106] На фиг. 10 схематично показан восьмой вариант осуществления устройства 250, выполненного из объединенных модулей 12, 14а, 14b, 16, 18, 20, 24 модульной системы 10 в режиме управления.
[00107] Очевидно, что устройство 250 является типом крана. Кран содержит захватный модуль 20, манипуляторы 21b которого предусматривают соответствующие удлинительные элементы 252, которые контактируют друг с другом в исходном положении манипуляторов 21b на своих передних концах.
[00108] Захватный модуль 20 предусматривает первый поворотный соединительный модуль 14а, и первый поворотный соединительный модуль 14а соединен со вторым поворотным соединительным модулем 14b, который обеспечивает большую степень свободы перемещения захватного модуля 20.
[00109] Второй захватный модуль 14b соединен с инфракрасным (IR) модулем 24, который соединен с модулем 12 управления, при этом инфракрасный (IR) модуль 24 применяется в качестве пассивного образующего конструкцию блока.
[00110] Таким образом, образующий конструкцию блок, используется только для сквозного проведения сигнала, и его функция датчика не используется в устройстве 250.
[00111] Кроме того, инфракрасный (IR) модуль 24 соединен вертикально по направлению вниз с помощью модуля 16 вращения, который, в свою очередь, соединен с приводным модулем 18. Также этот приводной модуль 18 не функционирует в контексте функции устройства 250 и применяется только для поддержки устройства 250 в сочетании с формообразующими и образующими конструкцию блоками 254 и расположенными на нем колесами 192, вследствие чего устройство 250 устойчиво. Таким образом, модуль 12 управления с массой его батареи применяется в качестве компенсации массы для стороны захватного модуля.
[00112] Вместо управляющих ползунков на фиг. 9 в системе 108 управления используются графические джойстики 256, 258. Таким образом, захватный модуль 20 и второй поворотный соединительный модуль 14b связаны с левым джойстиком 256, и поворотный соединительный первый модуль 14a и модуль 16 вращения связаны с правым джойстиком.
[00113] Точнее говоря, сдвиг кнопки 260 управления левого джойстика 256 в горизонтальной плоскости вызывает открытие и закрытие манипуляторов 21b захватного модуля 20 в определенных положениях. Сдвиг кнопки 260 управления левого джойстика 256 по вертикали вызывает поворот второго поворотного соединительного модуля 14b в направлении вверх и в направлении вниз. Сдвиг кнопки 262 управления правого джойстика 258 в горизонтальной плоскости приводит к вращению модуля 16 вращения на случайный угол поворота со скоростью вращения, которая, соответственно, определяется степенью сдвига кнопки управления. И перемещение кнопки 262 управления правого джойстика 258 по вертикали вызывает поворот первого поворотного соединительного модуля 14b в направлении вверх или вниз. Таким образом, подсвеченная точка 264, 266 левого джойстика 256 имеет цвет, который совпадает соответственно с цветом источника света 33 захватного модуля 20 или второго поворотного соединительного модуля 14b с целью идентификации. Подсвеченная точка 268, 270 правого джойстика 258 соответственно имеет одинаковый цвет с источником света 33 первого поворотного соединительного модуля 14a и модуля 16 вращения с целью идентификации.
[00114] Сдвиг кнопок 260, 262 управления по горизонтали или вертикали обеспечивает соответственно управление совместными перемещениями соответственно двух управляемых модулей 14а, 14b, 16, 20 одновременно.
[00115] Инфракрасный (IR) модуль 24 также может быть использован для управления приводным модулем 18, вследствие чего оба модуля 18, 24 не будут использоваться в качестве конструктивных модулей без функции пассивного проведения сигнала, но они будут выполнять собственные функции. Например, перемещение устройства 250 может быть обеспечено в качестве дополнительной функции колесами 192, которые расположены на приводном модуле. Поскольку система 108 управления содержит дополнительный элемент управления поверх существующих элементов управления 256, 258, это может ввести в заблуждение оператора, инфракрасный (IR) модуль 24 может взять на себя управление приводным модулем 18. Затем пользователь может управлять устройством 250 контролируемым образом посредством предварительно заданных движений руки над инфракрасным сенсорным элементом 25 модуля 24 датчиков.
[00116] Кроме того, вместо пассивных модулей 18, 24 могут применяться конструктивные модули 11.
[00117] В проиллюстрированных вариантах осуществления показаны только активные модули модульной системы 10. Следует понимать, что могут быть присоединены дополнительные активные модули, но также через переходные элементы могут быть добавлены или дополнены пассивные конструктивные и формообразующие модули из других модульных систем.
[00118] Как указано выше, очевидно, что настоящее изобретение обеспечивает крайне простое и отслеживаемое взаимное соединение отдельных модулей модульной системы, при этом взаимное соединение возможно в любое время и, в частности, без конструктивных корректировок положений или механического соединения модулей, которые объединены друг с другом.
[00119] Если не указано иное, все признаки настоящего изобретения могут свободно комбинироваться друг с другом. Также признаки, описанные в описании фигур, могут быть свободно объединены с другими признаками, если не указано иное. Таким образом, признаки, заявленные для устройства, также могут быть использованы для признаков в заявках на способ, и признаки способа могут быть использованы в заявках на устройство.
ПОЗИЦИОННЫЕ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
[00120] 10 модульная система
[00121] 11 конструктивный модуль, пассивный
[00122] 12, 12a, 12b модуль управления
[00123] 14, 14a, 14b поворотный соединительный модуль
[00124] 15a, 15b поворачиваемые элементы поворотного соединительного модуля 14
[00125] 16 модуль вращения
[00126] 17a, 17b вращаемые компоненты модуля 16 вращения
[00127] 18, 18a, 18b приводной модуль
[00128] 19 ось приводного модуля 18
[00129] 20 захватный модуль
[00130] 21a базовый элемент захватного модуля 20
[00131] 21b поворотные манипуляторы захватного модуля 20
[00132] 22 световой модуль
[00133] 23 светочувствительный элемент светового модуля 22
[00134] 24, 24a, 24b инфракрасный (IR) модуль
[00135] 25 инфракрасный (IR) сенсорный элемент модуля 24 датчиков
[00136] 26 интерфейс оператора модуля 12 управления
[00137] 28 клавиша «+» модуля 12 управления
[00138] 30 клавиша «-» модуля 12 управления
[00139] 32 клавиша приемника модуля 12 управления
[00140] 33 светящиеся индикаторы модулей, индикаторные устройства
[00141] 34 мини-USB-соединение
[00142] 35 комбинированная клавиша воспроизведения и паузы
[00143] 36 штыревая соединительная поверхность
[00144] 37 опорная поверхность штыревой соединительной поверхности 36
[00145] 38 гнездовая соединительная поверхность
[00146] 39 опорная поверхность гнездовой соединительной поверхности 38
[00147] 40 крестообразные выемки гнездовой соединительной поверхности 38
[00148] 42 крестообразные выступы штыревой соединительной поверхности 36
[00149] 44 круглая выемка гнездовой соединительной поверхности 38
[00150] 45 круглый выступ штыревой соединительной поверхности 36
[00151] 46 подрезы выемки 44
[00152] 47 выступы над подрезами 46
[00153] 48 штыри штыревой соединительной поверхности 36
[00154] 49a скосы выступов 50
[00155] 40b скосы выступов 47
[00156] 50 выступы штырей 48
[00157] 51 части между выступами 47
[00158] 52, 54, 56 контактные кольца в гнездовой соединительной поверхности 38
[00159] 58, 60, 62, 64 соответствующие контактные штыри в штыревой соединительной поверхности 36
[00160] 66a, 66b, 68a, 68b контактные точки наружного контактного кольца 56
[00161] 70 токонепроводящие части наружного контактного кольца 56
[00162] 100 первый преимущественный вариант осуществления устройства
[00163] 102, 104 проводники последовательных данных
[00164] 106 шина данных
[00165] 108, 108a, 108b система управления, устройства для необязательного взаимного соединения
[00166] 110 радиосвязь
[00167] 112 взаимное соединение
[00168] 120 второй преимущественный вариант осуществления устройства
[00169] 122, 124, 126, 128, 130 радиосвязь
[00170] 132 шина данных на основе радиосвязи
[00171] 140 третий преимущественный вариант осуществления устройства
[00172] 142, 144 два элемента устройства
[00173] 146, 148 соединение на основе WLAN
[00174] 150 152 взаимное соединение
[00175] 160 четвертый преимущественный вариант осуществления устройства
[00176] 162, 164 элементы устройства устройства 160
[00177] 166 взаимное соединение
[00178] 168 элемент отображения системы 108 управления
[00179] 170, 172 изображение модуля
[00180] 180 пятый преимущественный вариант осуществления устройства
[00181] 190 шестой преимущественный вариант осуществления устройства
[00182] 192 колесо
[00183] 194 формообразующий или образующий конструкцию блок, ползун
[00184] 196 переходной структурный блок
[00185] 198, 200, 202, 204, 206 изображение модуля
[00186] 207 таблица
[00187] 208 основные варианты взаимных соединений, выполненных в виде линий взаимных соединений
[00188] 210, 212 точка пересечения линий взаимных соединений 208
[00189] 214, 216 сплошные линии для выделения выбранного и запрограммированного взаимного соединения
[00190] 220 седьмой преимущественный вариант осуществления устройства
[00191] 222, 224, 226 формообразующий или образующий конструкцию блок
[00192] 228, 230 элементы управления, управляющие ползунки с центральным положением
[00193] 232, 234 клавиша для гироскопической функции
[00194] 236, 238 светящаяся точка, индикаторное устройство
[00195] 250 восьмой преимущественный вариант осуществления устройства
[00196] 252 удлиненные элементы манипуляторов 21b захватного модуля 20
[00197] 254 формообразующие и образующие конструкцию блоки
[00198] 256, 258 элементы управления, графические джойстики
[00199] 260, 262 кнопки управления джойстиков 256, 258
[00200] 264, 266 светящиеся точки джойстика 256, индикаторное устройство
[00201] 268, 270 светящиеся точки джойстика 258, индикаторное устройство.
Реферат
Изобретение относится к модульной системе, которая используется, например, в игрушках, а также для создания сложных роботизированных систем для промышленных применений. Технический результат изобретения заключается в обеспечении формирования перекрестных связей между модулями без необходимости физического изменения модулей. Модульная система для передачи информации и/или передачи энергии содержит по меньшей мере два модуля, которые могут быть скомбинированы друг с другом, при этом предусмотрены устройства, которые обеспечивают при необходимости взаимное соединение первого модуля со вторым модулем, вследствие чего между ними может обеспечиваться информационное и/или энергетическое соединение. Модульная система содержит систему управления, которая содержит блок отображения, указывающий выбранное взаимное соединение модулей, по меньшей мере в одном режиме работы модульной системы. Система управления содержит блок ввода, который выполнен с возможностью предоставления требуемого соединения, выбираемого по меньшей мере в одном режиме работы модульной системы путем выбора отображаемого варианта взаимного соединения. 2 н. и 10 з.п. ф-лы, 10 ил.
Комментарии