Способ дистанционного управления высотой полета радиоуправляемой модели летательного аппарата и устройство для его осуществления - RU2319191C1
Код документа: RU2319191C1
Чертежи
Описание
Изобретение относится к способам управления беспилотными летательными аппаратами и более точно касается способа дистанционного управления высотой полета радиоуправляемой модели летательного аппарата, особенно в режимах посадки и полета на сверхмалых высотах, а также касается устройства для осуществления такого способа.
Известен способ дистанционного управления высотой полета беспилотного летательного аппарата, а именно радиоуправляемой модели, путем подачи оператором, находящимся на земле, с пульта управляющих сигналов на отклонение органов регулирования высоты в соответствии с заданной траекторией полета. Известные устройства для осуществления такого способа включают в себя пульт управления, с помощью которого оператор направляет сигналы управления на приемник, расположенный на борту летательного аппарата. Эти сигналы через блок преобразования поступают на привод органов регулирования высоты. Управление высотой оператор производит, основываясь на своем опыте, при этом определение действительной высоты полета модели осуществляется визуально. Наиболее сложными этапами управления являются взлет и заход на посадку. Из-за волнения малоопытные пилоты выполняют слишком резкие маневры на малых высотах у поверхности земли. Несмотря на то, что радиоуправляемые модели обычно находятся в поле зрения оператора, точно определить высоту полета над землей при удалении уже на десятки метров достаточно сложно, ошибочное же определение высоты приводит к жесткой посадке или крушению.
Известен также способ управления беспилотным летательным аппаратом, при котором контроль за положением летательного аппарата осуществляют по изображению, передаваемому с бортовой видеокамеры. Однако и в этом случае также довольно сложно оценить действительную высоту полета, и иногда приходится ориентироваться только по линии горизонта, а такая оценка часто бывает ошибочной. В описанных случаях оператор, управляющий полетом, может следить за направлением полета, оценивать препятствия по направлению движения и корректировать траекторию с учетом этих препятствий, однако, в случае неверной оценки высоты, времени реакции человека может оказаться недостаточно, чтобы избежать крушения. Способы предупреждения сигналом также, как и способы, требующие переключения режима полета, недостаточны, поскольку для быстродвижущихся радиоуправляемых летательных аппаратов требуется более высокая скорость реагирования. Возникает необходимость применения способа управления, при котором реагирование на опасное сближение с землей или иной поверхностью происходит автоматически. При этом возможность управления летательным аппаратом с пульта должна оставаться в любой момент, так как внезапная подмена управления может дезориентировать управляющего. Прибор, который можно разместить на легком беспилотном летательном аппарате, должен быть небольших размеров и иметь небольшой вес. Размещение дорогостоящих устройств на малых радиоуправляемых моделях было бы нецелесообразно.
В настоящее время также известны способы и системы автоматического управления полетом и, в частности, посадкой, используемые на пилотируемых летательных аппаратах. Такие электронные бортовые системы анализируют множество факторов и автоматизируют процессы с заранее известным сценарием действий, как, например, посадка с использованием наземных радиомаяков. Эти системы характеризуются высокой сложностью. В частности, в патенте US, A, 3447765 описана система автоматического управления посадкой летательного аппарата, осуществляющая изменение сигнала управления полетом относительно продольно оси в соответствии с комбинированным сигналом, учитывающим действительную высоту полета, заданное значение скорости снижения и действительное значение скорости снижения. Данная система является достаточно сложной и, кроме того, приспособлена для установки и обеспечения управления посадкой в автоматическом режиме на пилотируемом летательном аппарате. Для радиоуправляемых моделей такие системы не известны.
В основу изобретения поставлена задача создать такой способ дистанционного управления высотой полета беспилотного летательного аппарата, в частности радиоуправляемой модели, при котором обеспечивалась бы автоматическая коррекция управляющего сигнала, исключающая опасное сближение летательного аппарата с поверхностью земли при полете на сверхнизких высотах, а также создать устройство для осуществления такого способа, которое имело бы небольшие габариты и вес, что позволило бы устанавливать его на борту беспилотного управляемого летательного аппарата с применением стандартных систем дистанционного управления.
Поставленная задача решается тем, что в способе дистанционного управления высотой полета радиоуправляемой модели летательного аппарата путем подачи с пульта управляющего сигнала на отклонение органов регулирования высоты в соответствии с заданной траекторией полета, согласно изобретению, задают предельный нижний уровень высоты полета, в процессе полета осуществляют измерение фактической высоты полета, по результатам измерений вычисляют текущее значение вертикальной составляющей скорости летательного аппарата и знак ее изменения, сравнивают фактическую измеренную высоту с заданным уровнем, и если фактическая высота оказывается меньше заданного уровня, осуществляют корректировку управляющего сигнала для компенсации отклонения высоты от заданного уровня посредством сигнала обратной связи по фактическому значению высоты и текущему значению вертикальной составляющей скорости, если знак изменения скорости отрицательный, или только по фактическому значению высоты, если знак изменения скорости положительный, и оставляют управляющий сигнал без изменения в случае, если фактическая высота превышает заданный уровень.
В предпочтительном варианте осуществления способа дополнительно задают предварительный нижний уровень, превышающий предельный нижний уровень, и, начиная с этого уровня, ограничивают вертикальную скорость установленным допустимым значением, при котором снижение от предельного нижнего уровня является безопасным.
Целесообразно управляющий сигнал подавать импульсами, а измерение высоты и вычисление текущего значения вертикальной составляющей скорости осуществлять в интервалах между поступающими импульсами управляющего сигнала.
Возможно полет беспилотного летательного аппарата реализовать посредством компьютерного симулятора.
Поставленная задача решается также и тем, что устройство дистанционного управления высотой полета радиоуправляемой модели летательного аппарата, содержащее установленный на пульте управления передатчик сигналов управления положением органов регулирования высоты модели и расположенный на борту модели приемник сигналов передатчика, связанный выходом с приводом перемещения органов регулирования высоты, согласно изобретению, снабжено датчиком измерения высоты и микропроцессором, имеющим средство программного обеспечения, выполненное с возможностью анализа полученных от датчика высоты данных о фактической высоте полета, вычисления по этим данным текущего значения вертикальной составляющей скорости летательного аппарата и знака ее изменения, сравнения фактической высоты полета с заданным предельным нижним значением высоты полета и, если она меньше заданного значения, изменения сигнала управления обратно пропорционально изменению высоты полета и вертикальной составляющей скорости, если знак изменения скорости отрицательный, и обратно пропорционально только изменению высоты, если знак изменения скорости положительный.
Желательно, чтобы на пульте управления было предусмотрено средство изменения заданного значения предельного нижнего уровня высоты полета и заданного допустимого значения скорости снижения от этого уровня.
В предпочтительном варианте выполнения микропроцессор расположен на пульте управления, а на летательном аппарате имеется передатчик для передачи данных о высоте полета с бортового датчика измерения высоты.
Возможно, чтобы к выходу микропроцессора был подключен блок управления выпуском шасси и средства включения имеющегося на борту летательного аппарата взлетно-посадочного оборудования.
Целесообразно в качестве датчика измерения высоты полета использовать ультразвуковой датчик высоты.
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления и прилагаемыми чертежами, на которых:
фиг.1 изображает блок-схему устройства дистанционного управления высотой полета радиоуправляемой модели летательного аппарата, согласно изобретению;
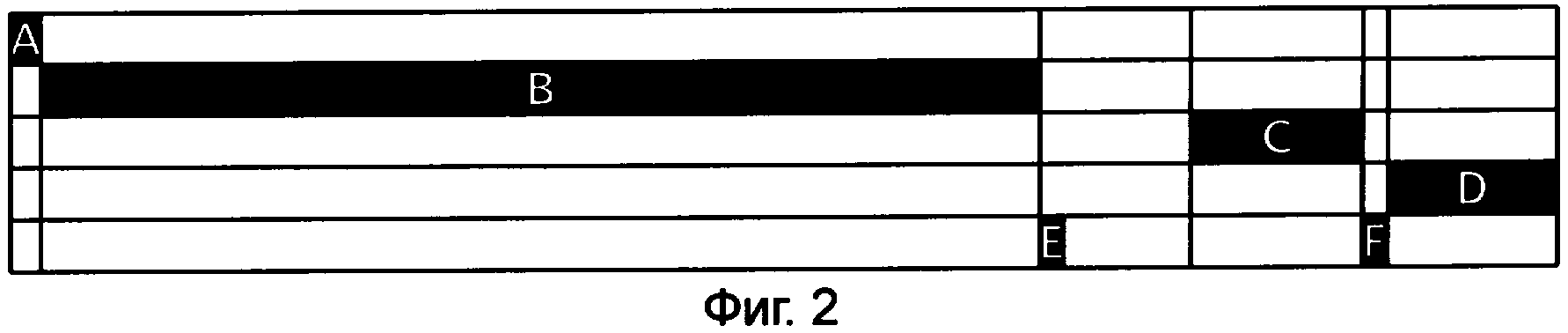
фиг.2 - временную диаграмму работы устройства, представленного на фиг.1.
Способ дистанционного управления высотой полета радиоуправляемой модели летательного аппарата, согласно изобретению, состоит в том, что исходя из аэродинамических характеристик конкретной модели и с учетом заданной траектории полета задают предельный нижний уровень высоты полета данной модели, в процессе полета осуществляют измерение фактической высоты полета и по результатам измерений вычисляют текущее значение и знак вертикальной составляющей скорости полета. Сравнивают измеренное значение высоты полета с заданным предельным нижним уровнем и, если оно оказывается меньше заданного предельного уровня, а знак изменения скорости отрицательный, осуществляют корректировку подаваемого оператором с пульта управляющего сигнала для компенсации отклонения высоты от заданного уровня посредством сигнала обратной связи по фактическому значению высоты и вычисленному текущему значению вертикальной составляющей скорости. Если знак изменения скорости положительный, то корректировку управляющего сигнала осуществляют посредством сигнала обратной связи только по фактическому значению высоты. Если же в результате сравнения окажется, что фактическое значения высоты превышает заданный нижний предельный уровень, то управляющий сигнал оставляют без изменений.
В предпочтительном варианте выполнения способа дополнительно задают предварительный нижний уровень, превышающий предельный нижний уровень и, начиная с этого уровня, в интервале высот между ним и нижним предельным уровнем ограничивают вертикальную составляющую скорости установленным допустимым значением, при котором снижение от предельного нижнего уровня является для данной модели безопасным.
Устройство дистанционного управления высотой полета радиоуправляемой модели летательного аппарата, в соответствии с вышеописанным способом, представлено на фиг.1. Устройство включает в себя пульт 1 управления с передатчиком 2 импульсных управляющих радиосигналов, приемник 3, установленный на борту модели так, что он способен принимать сигналы передатчика 2, микропроцессор 4, ко входу 5 которого подключен приемник 3, а к выходу 6 подключен ультразвуковой датчик 7 высоты, подключенный своим выходом к информационному входу 8 микропроцессора 4. Выход 9 микропроцессора 4 связан со входом привода 10 перемещения органов регулирования высоты полета летательного аппарата. Кроме того, микропроцессор 4 имеет вход 11 запуска режима программирования с помощью ключа 12 и выход 13, к которому подключен светодиод 14, являющийся индикатором режимов работы устройства. Ультразвуковой датчик 7 высоты содержит пьезоизлучатель 15, микрофон 16 и усилитель 17 принятого сигнала.
Способ дистанционного управления высотой полета радиоуправляемой модели беспилотного летательного аппарата, согласно изобретению, станет понятным из описания работы устройства.
Работа устройства описывается на примере управления полетом легкой радиоуправляемой модели самолета. Устройство не подменяет ручного управления, но осуществляет относительное отклонение руля высоты. Начиная с заданного значения высоты 10 метров (заданный предварительный нижний уровень), следит, чтобы скорость снижения не превышала 5 метров в секунду (установленное допустимое значение скорости снижения от нижнего предельного уровня); ниже высоты 2,5 метра происходит постепенное смещение позиции руля высоты с таким расчетом, чтобы нейтральное положение штурвала соответствовало полету на высоте не менее 2,5 метра (нижний предельный уровень). Посадка от предельного нижнего уровня осуществляется за счет снижения горизонтальной составляющей скорости полета модели, при этом увеличивается угол атаки и постепенно снижается скорость модели до посадочной (все значения высот устанавливаются в зависимости от конструкции модели самолета). Если в результате холмистого характера поверхности земли датчик 7 высоты зафиксирует внезапное и значительное увеличение высоты, то возвращение руля высоты в положение, соответствующее положению штурвала, происходит постепенно, а если оператор переводит рукоятку управления в нейтральное положение, то дальнейшее управление происходит в обычном режиме. Для того чтобы работа устройства не вызвала кабрирования при резком снижении, величина отклонения руля высоты уменьшается, как только высота полета начнет увеличиваться. Таким образом, модель плавно набирает требуемую высоту. Для предотвращения сваливания из-за значительной потери скорости горизонтального полета модели крылатого летательного аппарата возможно подключение датчика горизонтальной скорости, для устранения возможных опасных кренов летательного аппарата возможна установка на борт гироскопического или иного электронного устройства стабилизации.
Для начинающих пилотов большинство разбитых моделей приходится на взлеты и посадки, в то время как применение описываемого устройства обеспечивает правильный запуск модели с земли или с рук, а главное идеальную посадку как для моделей вертолета, так и планера, который сможет автоматически лечь на траву с минимальной скоростью даже если модель вышла из зоны контроля. Кроме того, даже опытному пилоту бывает сложно точно определить высоту полета модели над холмистым полем уже на расстоянии в 50 метров. Устройство дает возможность радиоуправляемой модели лететь и маневрировать над гладкой поверхностью на высоте в десятки сантиметров, что было бы невозможно в ином случае, так как при изменении скорости и траектории полета было бы необходимо синхронно и пропорционально управлять шаг/газом несущего винта вертолета или мгновенно реагировать на любой крен крылатого летательного аппарата.
В большинстве устройств дистанционного управления в качестве сигнала, определяющего положение органов регулирования высоты летательного аппарата, используют импульсный сигнал, повторяемый каждые 20 мс, при длительности импульса в пределах от 1 до 2 мс. В описываемом устройстве корректировка осуществляется путем изменения длительности управляющего сигнала. Если изменения длительности импульса не требуется (в режиме, когда фактическая высота полета превышает нижний предельный уровень), то сразу после окончания поступившего от приемника 3 управляющего импульса (позиция С на временной диаграмме фиг.2) на выходе 9 микропроцессора 4 генерируется импульс аналогичной длительности (позиция D на временной диаграмме). На следующем этапе происходит излучение ультразвукового сигнала в направлении земли (позиция А на временной диаграмме). Ультразвуковой сигнал исходит от пьезоизлучателя 15 ультразвукового датчика 7 и после отражения от поверхности земли улавливается резонансным микрофоном 16 этого же датчика. Задержка между моментом излучения и моментом приема отраженного сигнала определяет фактическую высоту полета. Затухание звукового сигнала в воздухе пропорционально квадрату пройденного расстояния, поэтому усилитель 17 полученного от микрофона 16 сигнала должен менять уровень усиления с минимального до максимально установленного в период ожидания, либо эту задачу решает встроенный в микропроцессор 4 компаратор или аналоговый вход. В данном варианте устройства период максимального ожидания отраженного сигнала (позиция В на временной диаграмме) является ограниченным и соответственно ограниченной является высота, которая может быть определена. Этот период, по существу, определяет заданный нижний предельный уровень высоты полета. Максимальная высота, которая может быть измерена, составляет в описываемом примере 2,5 метра и в пределах этой высоты прибор осуществляет изменение (корректировку) управляющего импульсного сигнала, поступающего на вход привода 10 перемещения органов регулирования высоты полета. В период, обозначенный на временной диаграмме позицией Е, в интервале между импульсами управляющего сигнала, осуществляется вычисление вертикальной составляющей скорости и знака ее изменения (путем сопоставления последних измеренных значений высоты), а также происходит сравнение фактической измеренной высоты с заданным значением. Если в результате сравнения фактической измеренной высоты с заданным нижним предельным уровнем полета фактическая измеренная высота оказывается меньше предельного заданного уровня и знак изменения скорости отрицательный, на соответствующий вход средства формирования управляющего сигнала, например, сумматора (на чертеже условно не показан) поступает сигнал обратной связи по фактическому значению высоты и текущему значению вертикальной составляющей скорости или только по фактическому значению высоты, если знак изменения скорости положительный. При этом соответственно изменяется длительность управляющего импульса D на выходе 9 микропроцессора 4. Если в результате сравнения фактическая измеренная высота превышает заданный предельный уровень (2,5 м), управляющий сигнал повторяется без изменений. В период, обозначенный на временной диаграмме буквой F, вычисляется длительность исходящего управляющего импульса D.
Перед запуском модели на земле устройство переводят в режим программирования, замыканием ключа 12. В этом режиме в память средства программного обеспечения микропроцессора 4 с пульта 2 управления заводят данные, определяющие нейтральную позицию, максимальные отклонения руля высоты в обоих направлениях, величину допустимого значения скорости снижения, величину предельного нижнего уровня высоты полета, значение предварительного нижнего уровня. Светодиод 14 отображает серией вспышек текущий режим при программировании, а в процессе эксплуатации периодичность вспышек отображает фактическую высоту полета.
Таким образом, устройство автоматически обеспечивает следующие режимы полета модели:
1) на высоте, превышающей нижний заданный предельный уровень (более 2,5 м), управляющий сигнал повторяется без изменения;
2) на высоте, меньшей заданного предельного нижнего уровня (менее 2,5 м), сигнал изменяется с расчетом увеличения высоты в случае снижения обратно пропорционально высоте и пропорционально скорости снижения;
3) на высоте, меньшей заданного предельного нижнего уровня (менее 2,5 м), сигнал изменяется с расчетом увеличения высоты и обратно пропорционально только высоте, в случае набора высоты;
4) в случае увеличения высоты до значений, превышающих нижний предельный уровень, управляющий сигнал, скорректированный за счет обратной связи, изменяется в сторону снижения высоты, но с ограничением скорости этого изменения, в интервале между предварительным нижним уровнем и предельным нижним уровнем вплоть до достижения соответствия между высотой и положением рукоятки пульта управления, если положение рукоятки пульта управления находится ниже нейтрального.
Устройство, согласно изобретению, является конструктивно достаточно простым и может быть установлено на различные авиамодели. На моделях крылатых летательных аппаратов устройство устанавливают в цепи управления рулем высоты. На моделях вертолетов устройство устанавливают в цепи управления коллективным шагом основного ротора, при этом для управления оборотами двигателя должен применяться гувернер. Вертолет с установленным устройством, согласно изобретению, выполняет безопасную посадку в режиме авторотации, а также может выполнять полеты на малой высоте в пилотажном режиме, когда обороты двигателя сохраняются постоянными благодаря гувернеру.
Вариант выполнения устройства, в котором с выхода микропроцессора поступает сигнал на выпуск шасси и запуск другого взлетно-посадочного оборудования (например, посадочных огней, закрылков и др.), позволяет осуществлять указанные операции автоматически в зависимости от режима полета. Фиксированные значения поступающих на выход сигналов для режимов полета у поверхности земли и на высоте задаются заранее с пульта, в режиме программирования устройства.
В том случае, когда управление моделью требует сложного микширования сигналов управления для нескольких исполнительных механизмов, наиболее удобным является вариант выполнения устройства, в котором на борту летательного аппарата установлен радиопередатчик данных о высоте, а пульт дистанционного управления оснащен приемником и микропроцессором и осуществляет микширование каналов с учетом сигнала отклонения, основанного на данных о высоте полета. Например, в некоторых моделях вертолетов рукоятка шаг/газа микшируется сразу на четыре канала управления исполнительными механизмами и способ микширования зависит от установленного режима полета.
В настоящее время обучение пилотированию радиоуправляемых моделей осуществляют на компьютерных симуляторах. Внесение функций описанного устройства в алгоритм компьютерного симулятора позволит не только оценить удобство и новые возможности в отношении полетов на низкой высоте, но и поможет определить оптимальные режимы работы устройства для выбранной модели.
Устройство дистанционного управления высотой полета, выполненное согласно настоящему изобретению, может быть использовано на моделях самых различных летательных средств. На моделях самолетов и планеров устройство осуществляет относительное отклонение руля высоты, на моделях вертолетов - управление двигателем и шагом винтов.
Реферат
Изобретение относится к области управления беспилотными летательными аппаратами. Технический результат заключается в исключении возможности опасного сближения с поверхностью земли. Способ заключается в подаче с пульта управляющего сигнала на отклонение органов регулирования высоты летательного аппарата в соответствии с заданной траекторией полета, задании предельного нижнего уровня высоты полета, измерении в процессе полета, вычислении по результатам измерений текущего значения вертикальной составляющей скорости летательного аппарата и знака ее изменения, сравнении фактической измеренной высоты с заданным уровнем, и если фактическая высота оказывается меньше заданного уровня, осуществлении корректировки управляющего сигнала для компенсации отклонения высоты от заданного уровня посредством сигнала обратной связи по фактическому значению высоты и текущему значению вертикальной составляющей скорости. Устройство для осуществления способа снабжено датчиком измерения высоты и микропроцессором, формирующим сигнал коррекции управляющего сигнала. 2 н. 6 з.п. ф-лы, 2 ил.

Комментарии