Устройство для обработки информации, способ обработки информации и носитель информации - RU2737128C2
Код документа: RU2737128C2
Чертежи





































Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для обработки информации, способу обработки информации и носителю информации.
Уровень техники
В прошлом предлагались различные развлечения, игры и тому подобное с использованием объектов. Например, предлагали игрушку, которая позволяет формировать трехмерный объект с использованием множества блоков или компонентов.
Например, в PTL 1 описана технология, в которой изображение реального объекта, расположенного на игровом поле, обнаруживают или отслеживают на основании результата формирования изображения игрового поля.
Список цитирования
Патентная литература
[PTL 1]
JP 2016-76167A
Раскрытие сущности изобретения
Техническая задача
Однако в PTL 1 не рассмотрен процесс управления перемещением движущегося тела в соответствии с информацией положения, соответствующей заданному шаблону расстановки.
Следовательно, настоящее изобретение предлагает новое и усовершенствованное устройство для обработки информации, способ обработки информации и носитель информации, который может управлять перемещением движущегося тела в соответствии с информацией положения, соответствующей заданному шаблону расстановки.
Решение технической задачи
Настоящее изобретение обеспечивает устройство для обработки информации, включающее в себя блок получения информации, который получает информацию положения от датчика, выполненного с возможностью считывать заданный шаблон расстановки, и блок управления перемещением, который управляет перемещением первого движущегося тела, включающее в себя перемещение в реальном пространстве, на основании информации положения.
Дополнительно, настоящее изобретение обеспечивает способ обработки информации, включающий в себя получение информации положения от датчика, выполненного с возможностью считывать заданный шаблон расстановки, и использование процессора для управления перемещением первого движущегося тела, включающее в себя перемещение в реальном пространстве, на основании информации положения.
Дополнительно, настоящее изобретение обеспечивает носитель информации, включающий в себя первый шаблон расстановки, включающий в себя множество различных шаблонов, определяющих информацию положения относительно реального пространства, при этом, первый шаблон расстановки имеет первую область и второй шаблон расстановки, определяющий информацию управления относительно перемещения движущегося тела, причем второй шаблон расстановки имеет вторую область, меньшую, чем первая область.
Полезный результат изобретения
Как описано выше, в соответствии с настоящим изобретением, можно управлять перемещением движущегося тела в соответствии с информацией положения, соответствующей заданному шаблону расстановки. Следует отметить, что описанный в настоящем документе полезный эффект не может быть ограничен, и могут быть любые полезные эффекты, описанные в настоящем изобретении.
Краткое описание чертежей
Фиг. 1 является пояснительным видом, иллюстрирующим пример конфигурации системы для обработки информации, общей для вариантов осуществления настоящего изобретения.
Фиг.2 представляет собой пример вида снизу тележки 20 в соответствии с вариантами осуществления.
Фиг.3 представляет собой пример вида спереди тележки 20 в соответствии с вариантами осуществления.
Фиг.4 представляет собой пример вида сверху тележки 20 в соответствии с вариантами осуществления.
Фиг.5 представляет собой пример вида сбоку тележки 20 в соответствии с вариантами осуществления.
Фиг.6 представляет собой схему, иллюстрирующая пример, в котором игрушка 40 прикреплена к тележке 20.
Фиг.7 представляет собой блок-схему, иллюстрирующую пример функциональной конфигурации тележки 20.
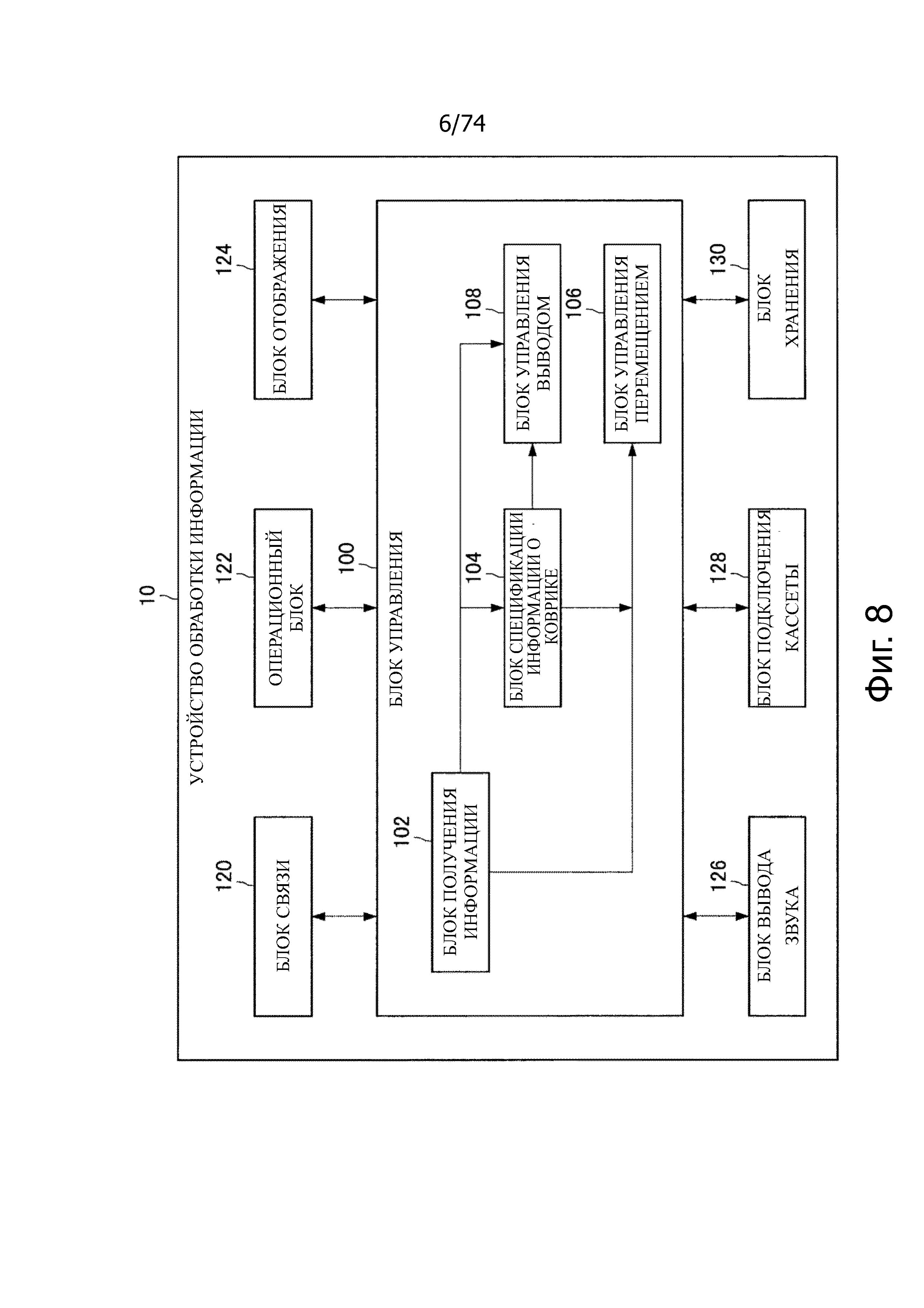
Фиг.8 представляет собой функциональную блок-схему, иллюстрирующую пример конфигурации устройства 10 для обработки информации в соответствии с первым вариантом осуществления.
Фиг.9 представляет собой схему, иллюстрирующую пример указания идентификатора (ID) коврика в соответствии с первым вариантом осуществления.
Фиг. 10 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 11 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 12 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 13 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 14 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 15 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 16 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
Фиг. 17 является схемой, иллюстрирующей пример указания идентификатора коврика в соответствии с первым вариантом осуществления.
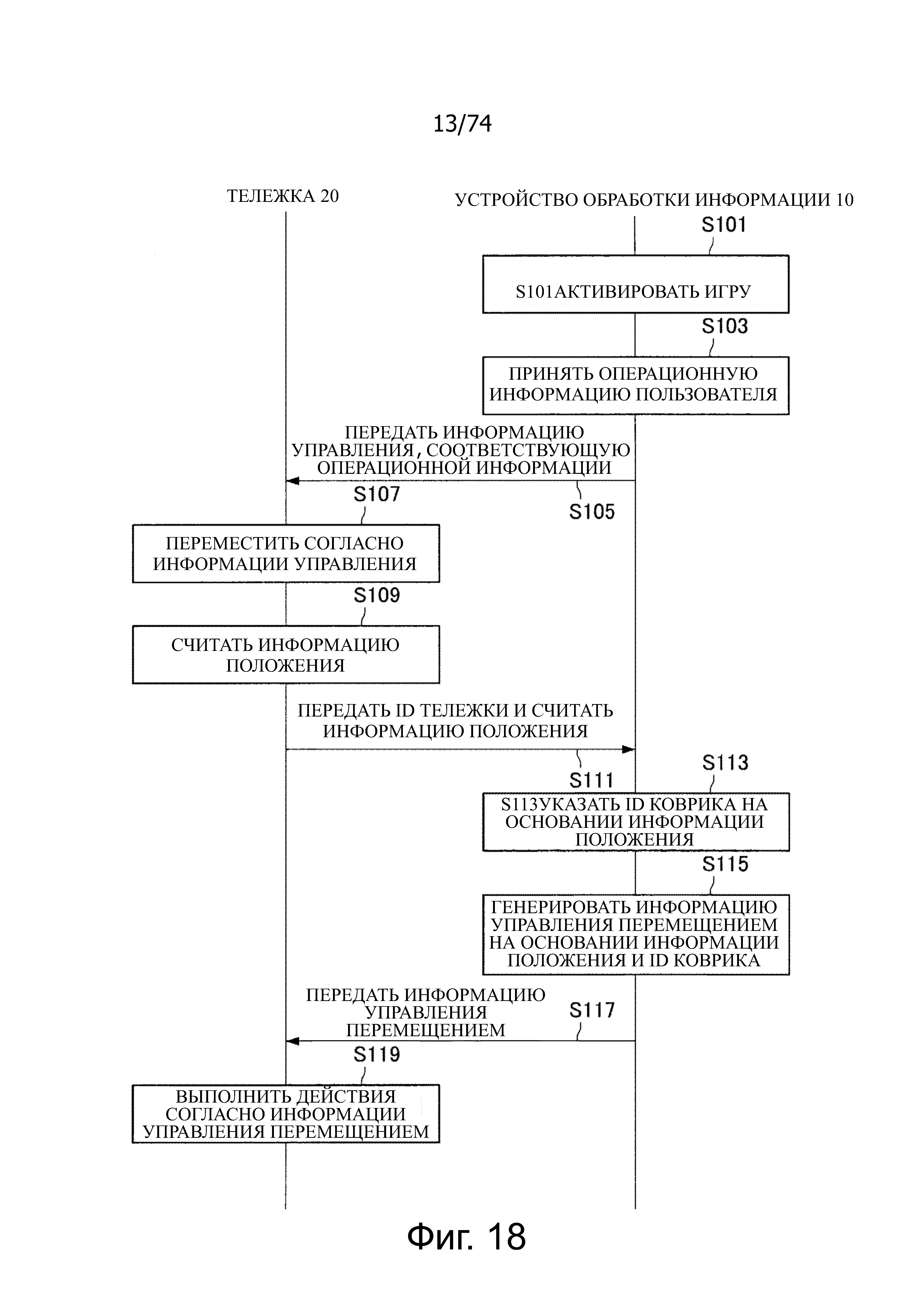
Фиг. 18 является схемой последовательности операций, иллюстрирующая ход процесса в соответствии с первым вариантом осуществления.
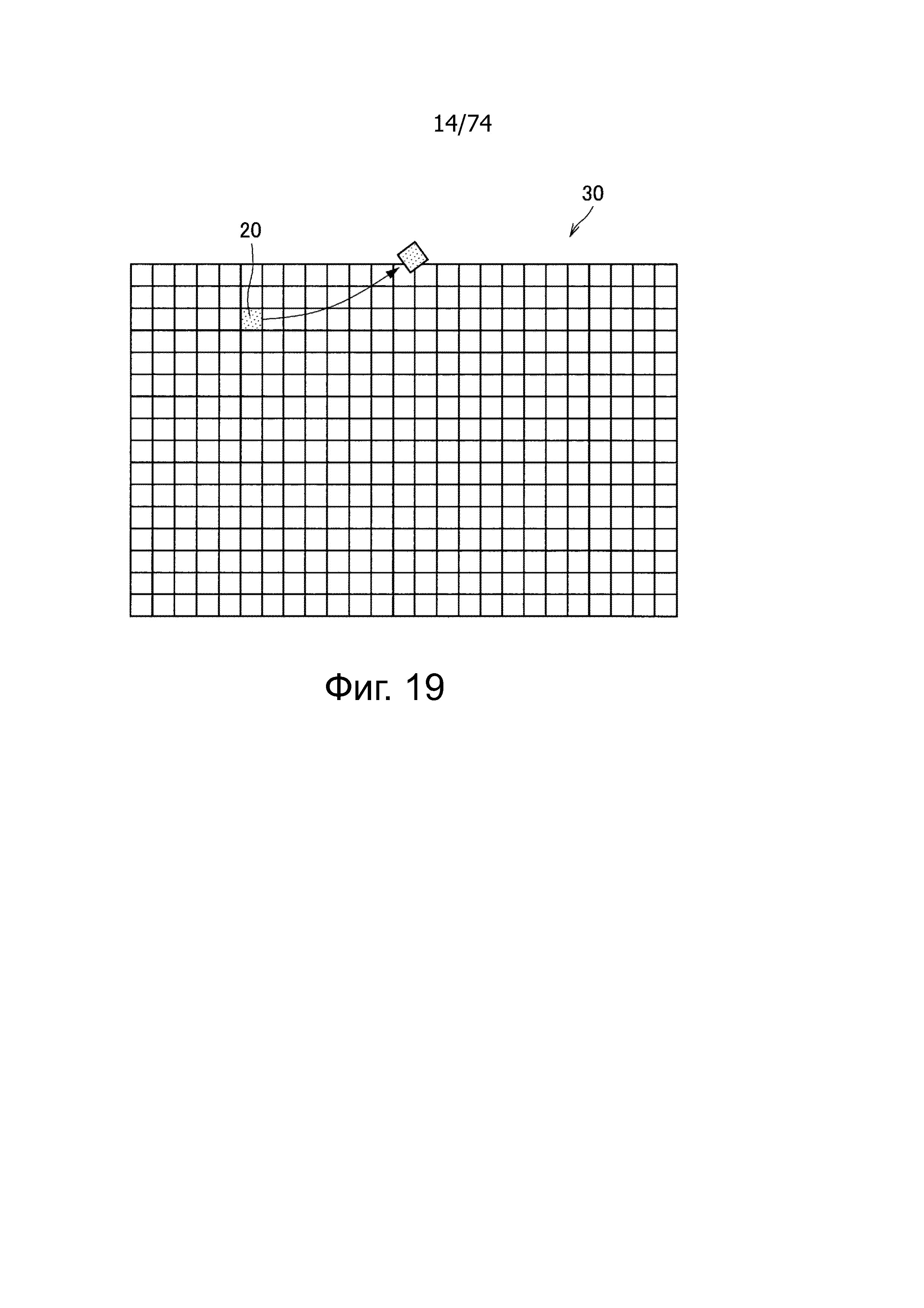
Фиг. 19 является пояснительным видом, иллюстрирующим техническую задачу второго варианта осуществления.
Фиг. 20 является блок-схемой, иллюстрирующей пример конфигурации устройства 10 для обработки информации согласно второму варианту осуществления.
Фиг. 21 является схемой, иллюстрирующей пример управления перемещением тележки 20 согласно второму варианту осуществления.
Фиг. 22 является схемой, иллюстрирующей пример управления перемещением тележки 20 согласно второму варианту осуществления.
Фиг. 23 является схемой, иллюстрирующей пример управления перемещением тележки 20 согласно второму варианту осуществления.
Фиг. 24 является схемой, иллюстрирующей пример управления перемещением тележки 20 согласно второму варианту осуществления.
Фиг. 25 является схемой, иллюстрирующей пример перемещения тележки 20 при наличии неисправности согласно третьему варианту осуществления.
Фиг. 26 является схемой, иллюстрирующей пример перемещения тележки 20 при наличии неисправности согласно третьему варианту осуществления.
Фиг. 27 является схемой, иллюстрирующей пример соединения множества ковриков 30 согласно четвертому варианту осуществления.
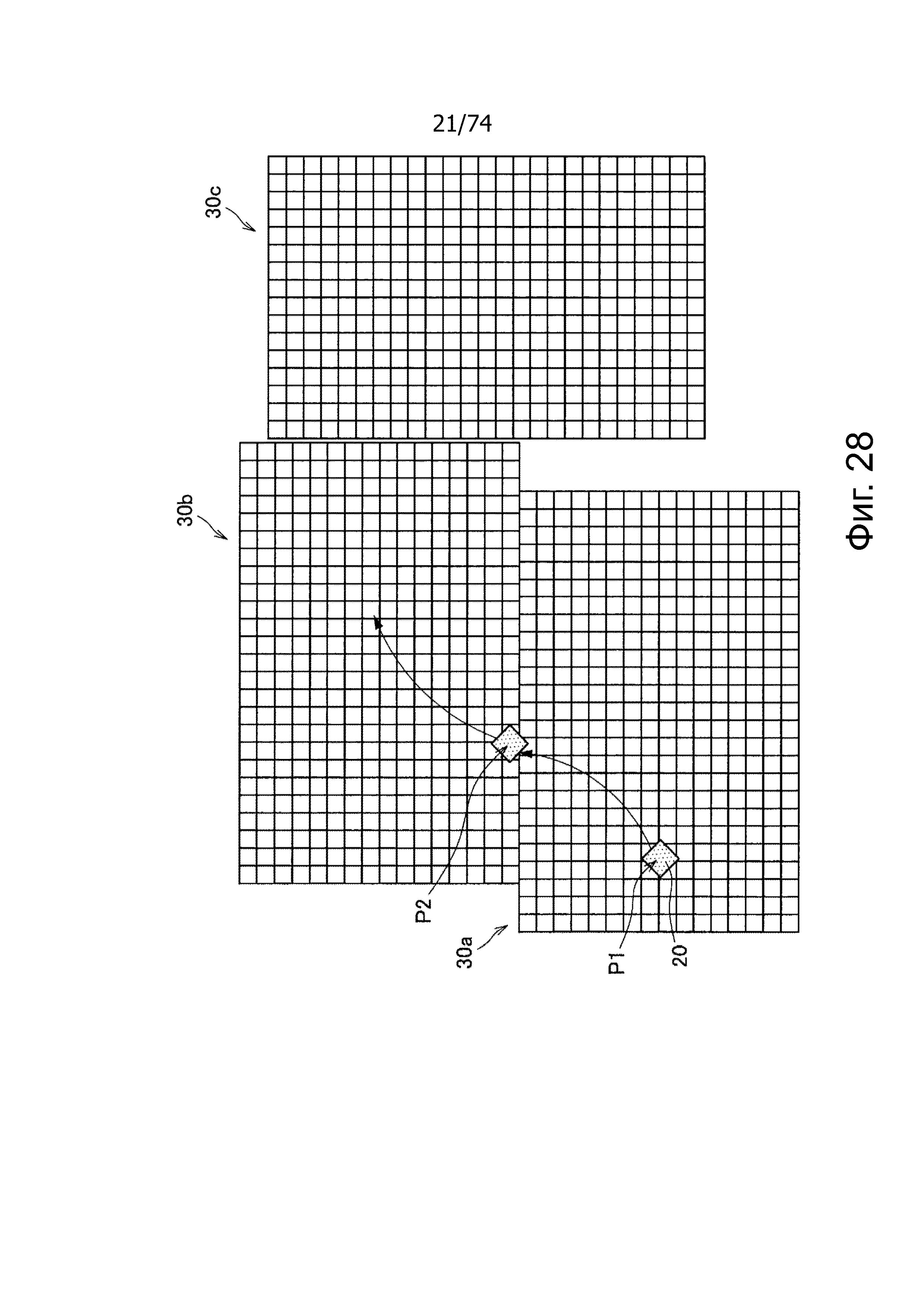
Фиг. 28 является схемой, иллюстрирующей пример, в котором тележку 20 перемещают на множестве соединенных ковриков 30.
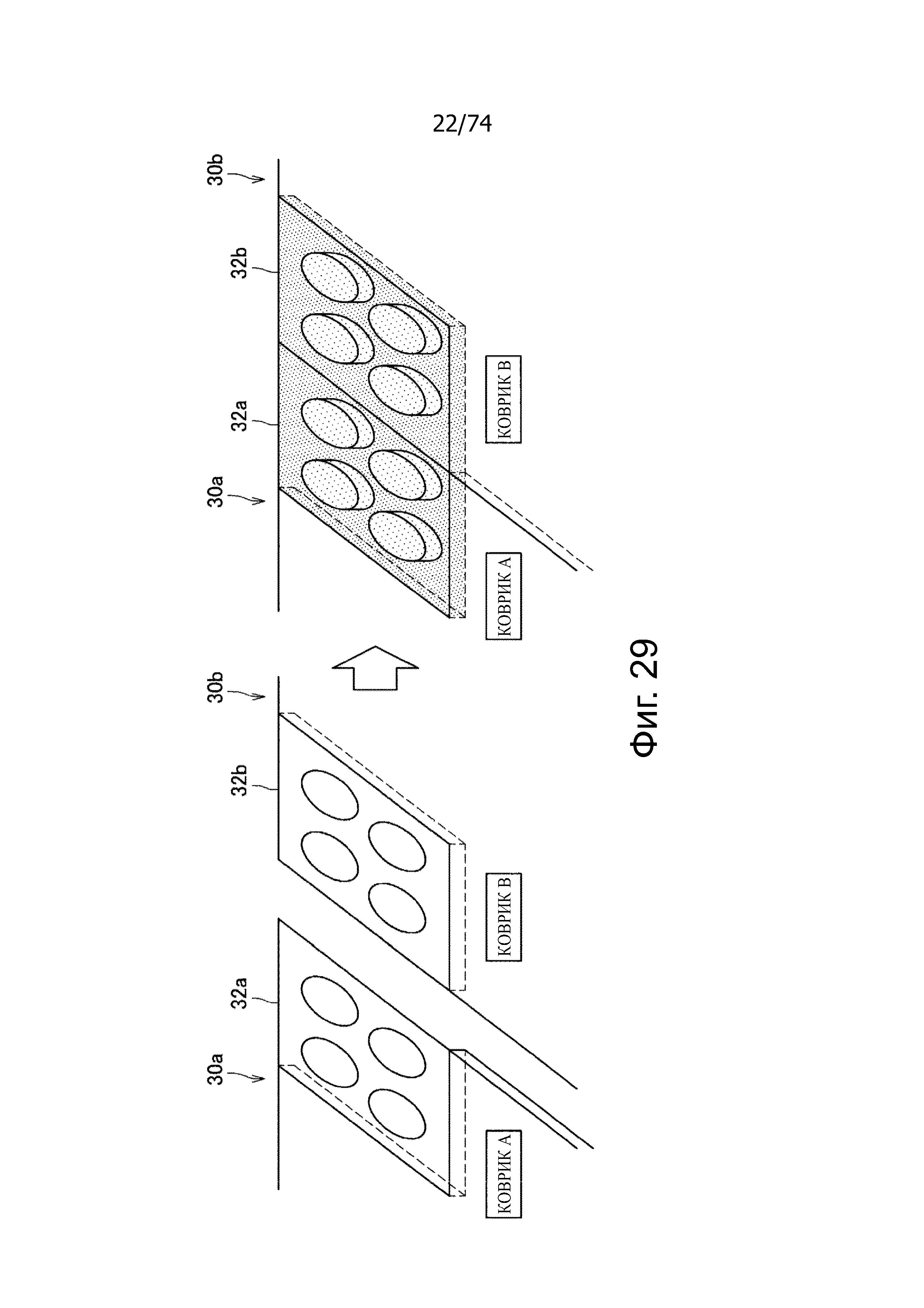
Фиг. 29 является схемой, иллюстрирующей пример структуры углов отдельных ковриков 30 согласно четвертому варианту осуществления.
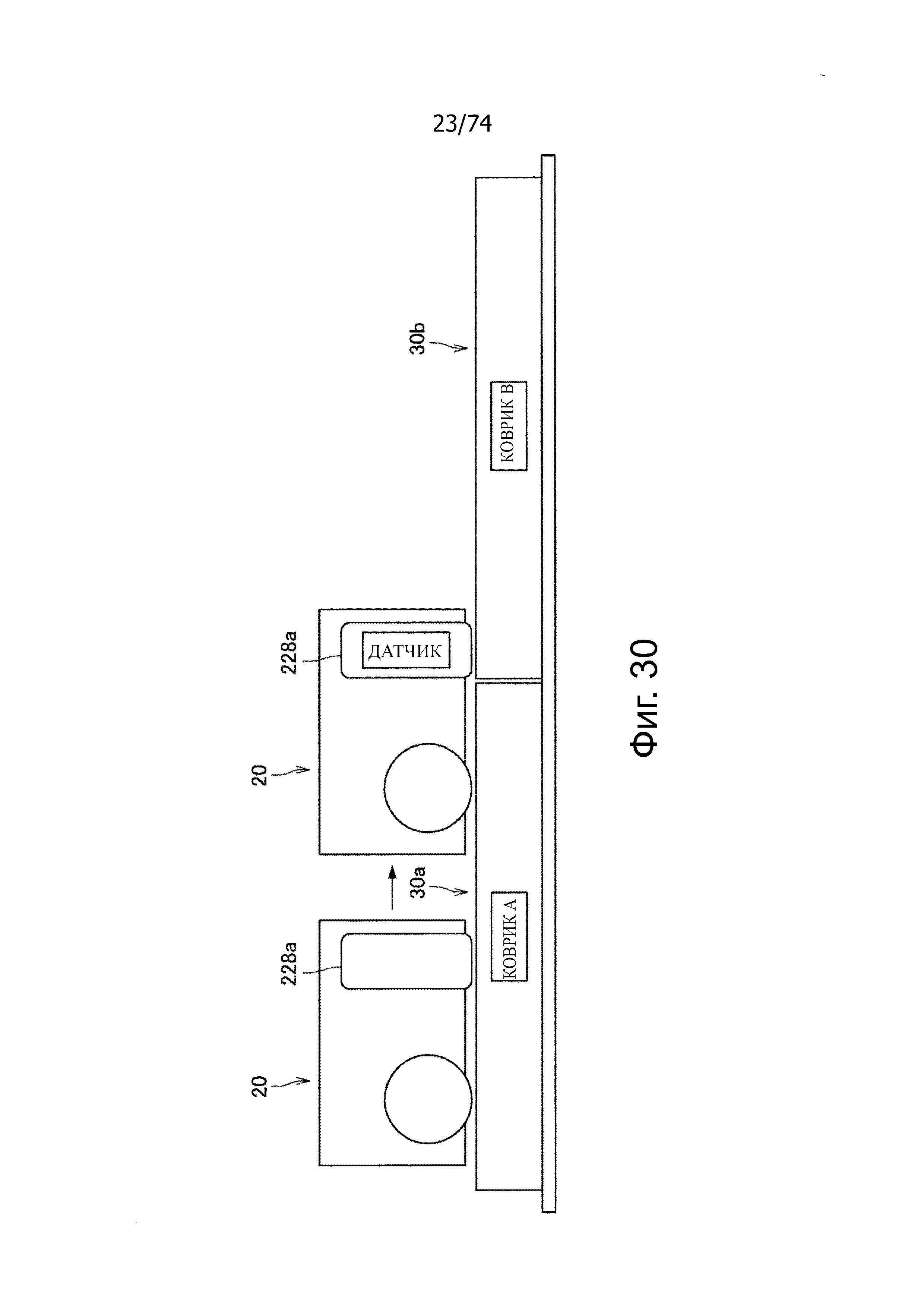
Фиг. 30 является схемой, иллюстрирующей пример определения, соединены ли коврик 30a и другой коврик 30b, когда тележка 20 расположена на краю коврика 30a согласно четвертому варианту осуществления.
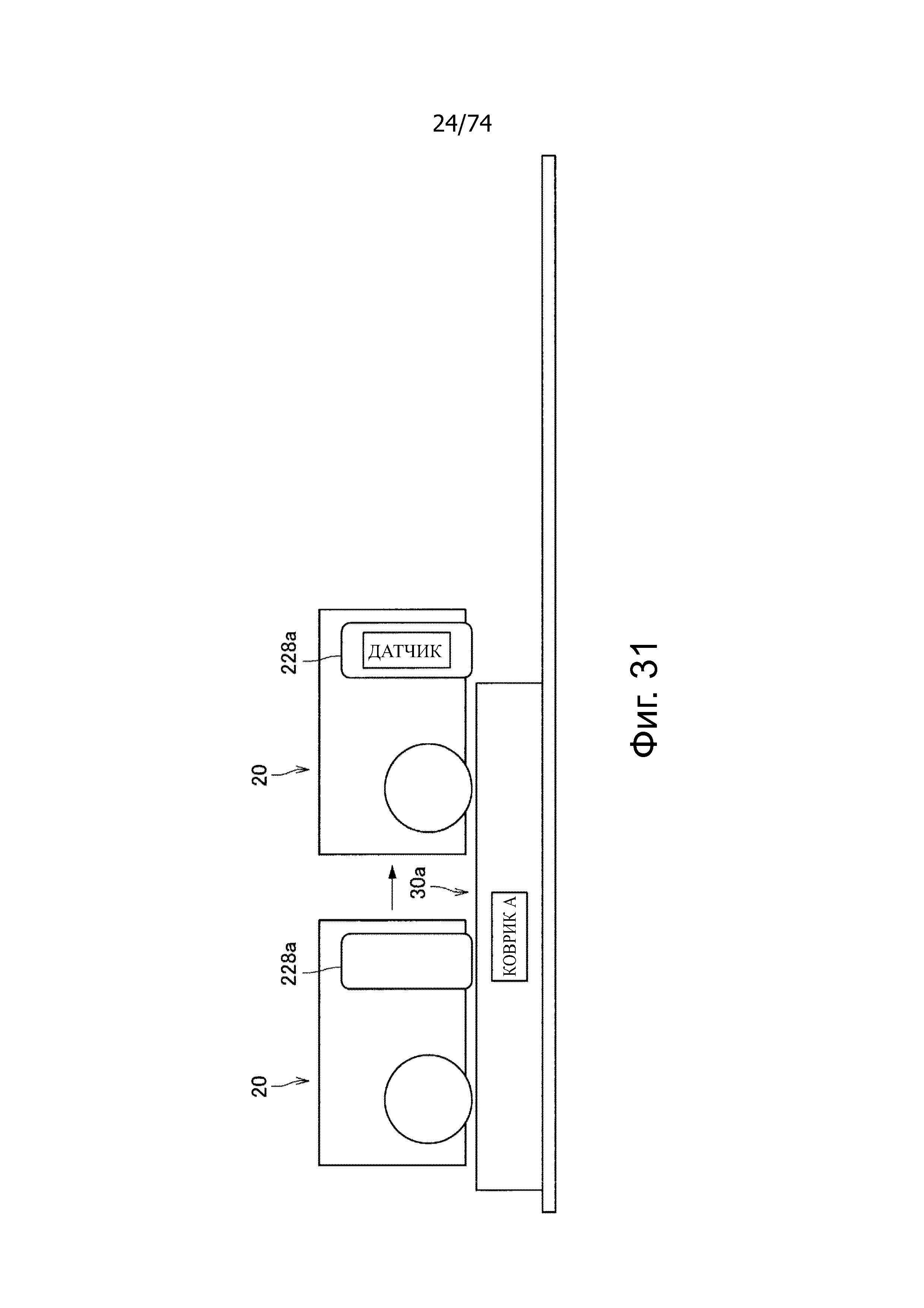
Фиг. 31 является схемой, иллюстрирующей пример определения, соединены ли коврик 30a и другой коврик 30b, когда тележка 20 расположена на краю коврика 30a согласно четвертому варианту осуществления.
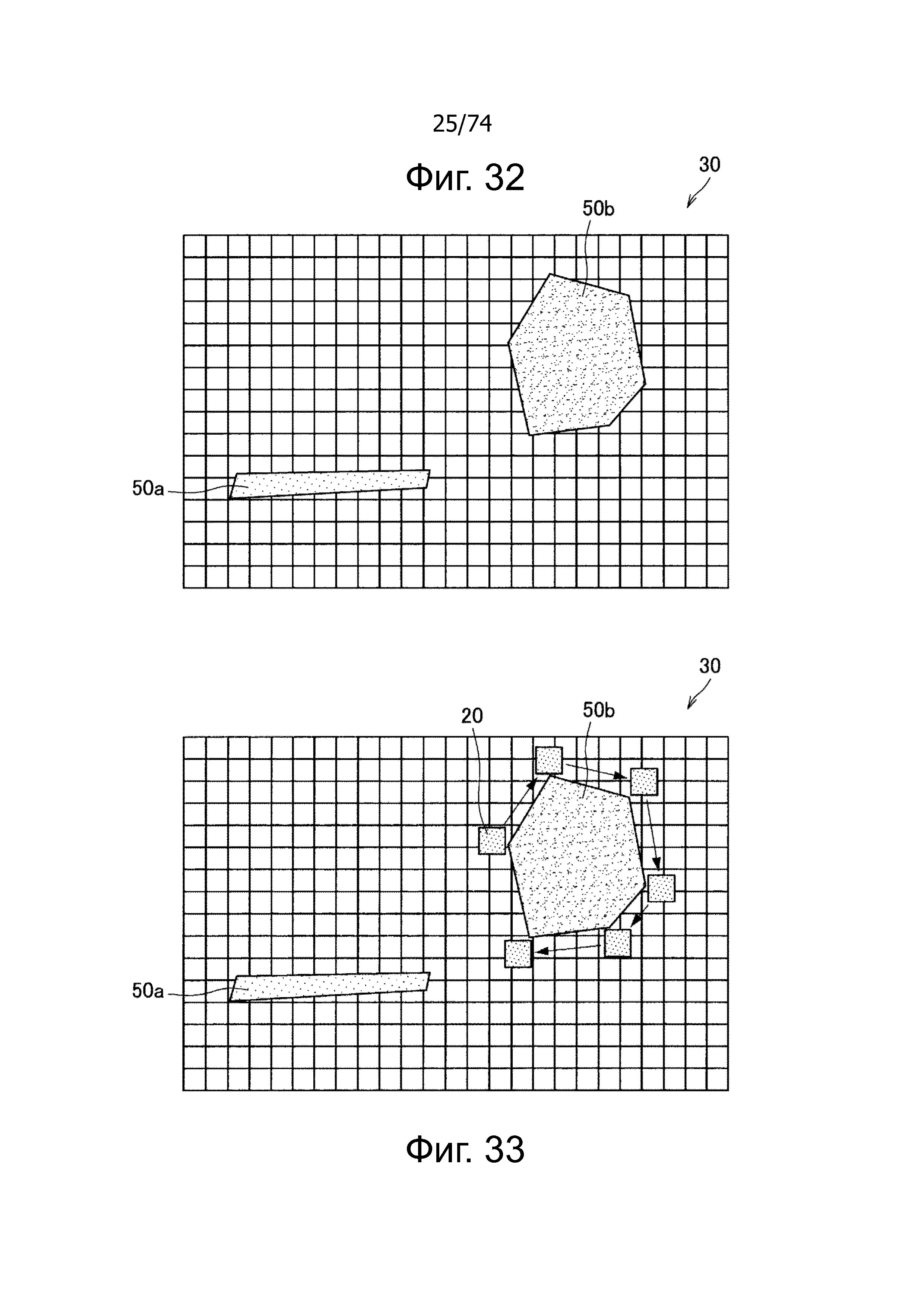
Фиг. 32 является схемой, иллюстрирующей пример добавления полигонов 50 к коврику 30 согласно пятому варианту осуществления.
Фиг. 33 является схемой, иллюстрирующей пример добавления полигонов 50 к коврику 30 согласно пятому варианту осуществления.
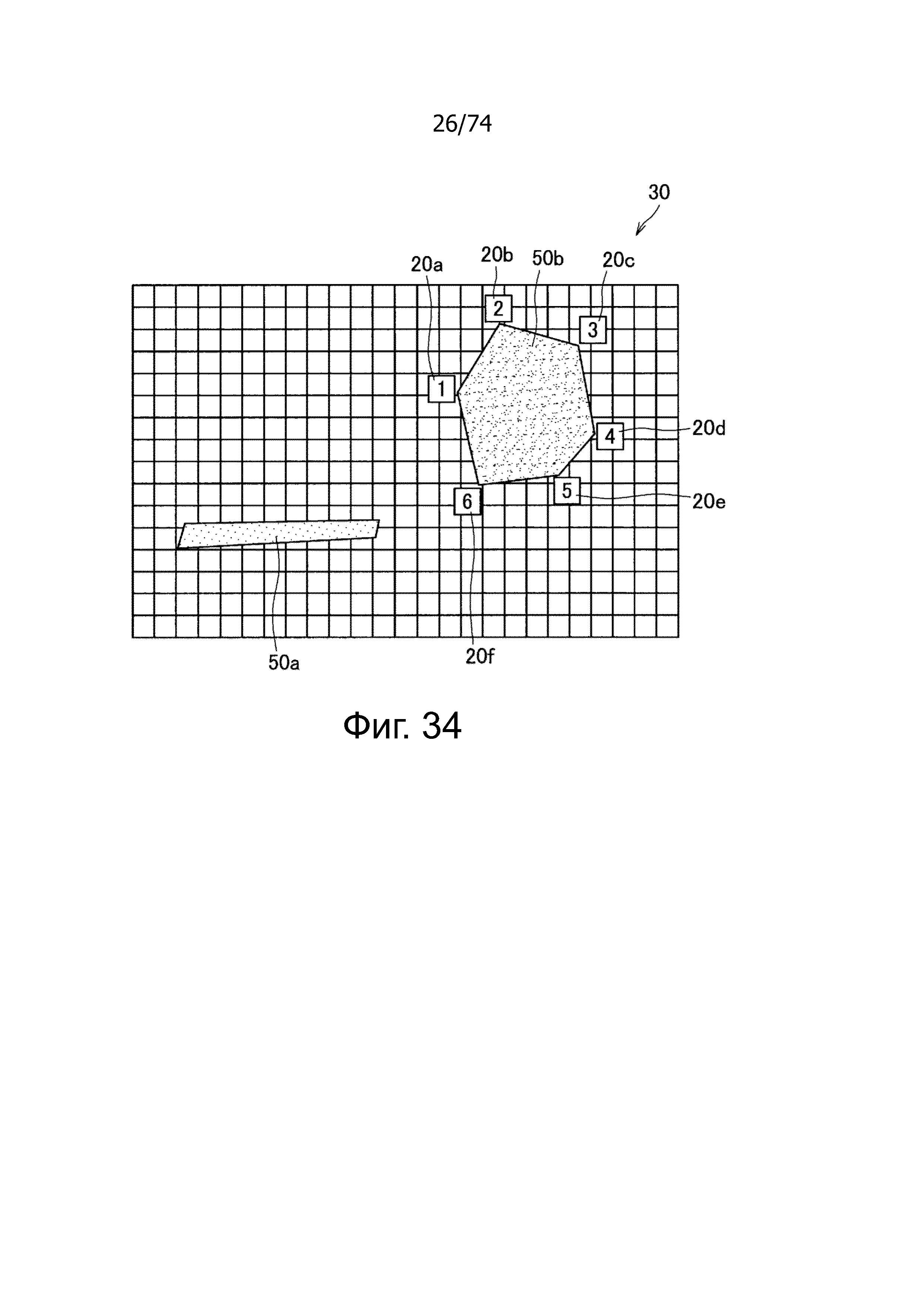
Фиг. 34 является схемой, иллюстрирующей пример добавления полигонов 50 к коврику 30 согласно пятому варианту осуществления.
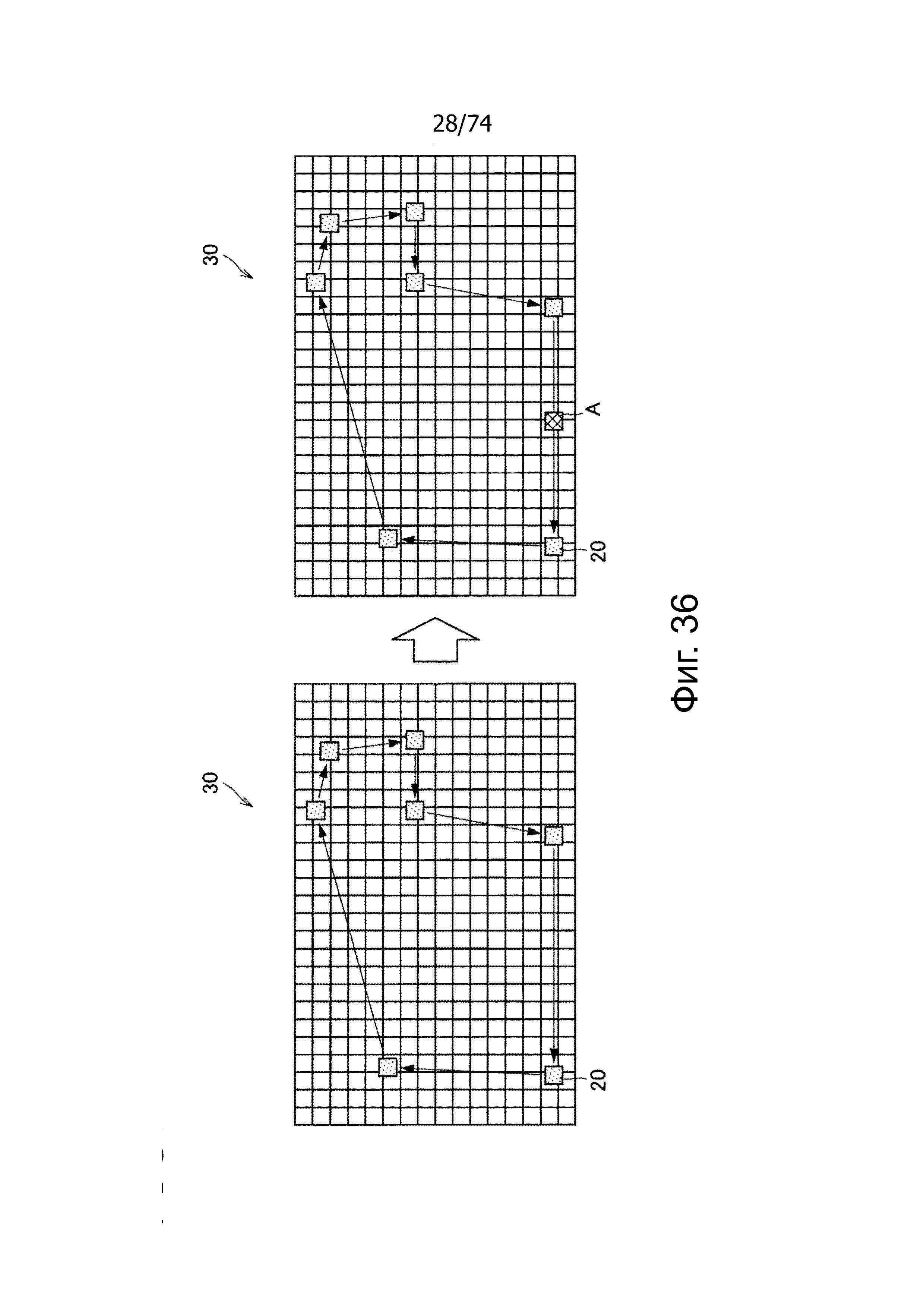
Фиг. 35 является схемой, иллюстрирующей пример изменения уже установленного курса согласно пятому варианту осуществления.
Фиг. 36 является схемой, иллюстрирующей пример изменения уже установленного курса согласно пятому варианту осуществления.
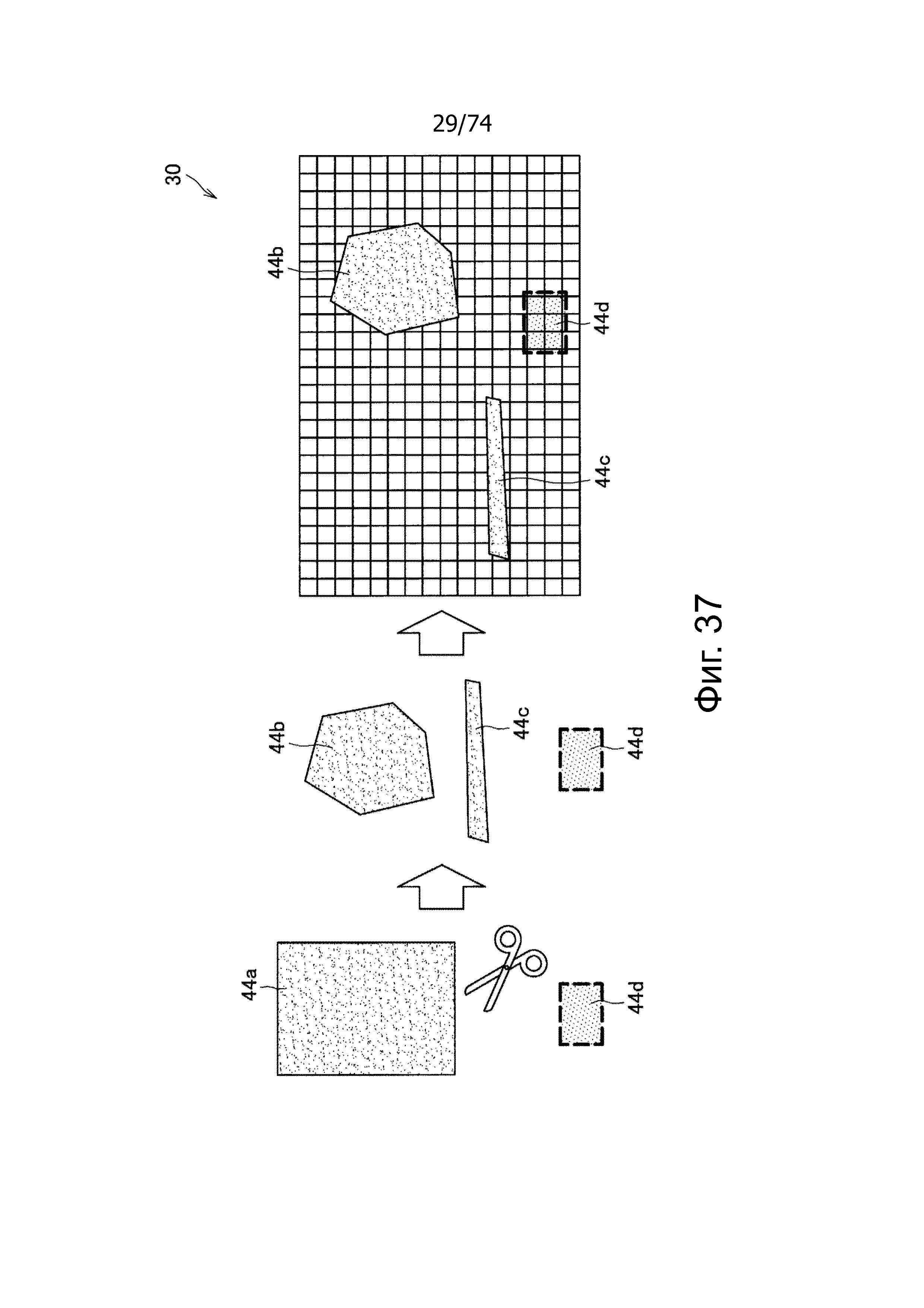
Фиг. 37 является схемой, иллюстрирующей пример добавления полигонов 50 к коврику 30 согласно пятому варианту осуществления.
Фиг. 38 является схемой, иллюстрирующей пример размещения на коврике 30 бумаги 44 с записанной специальной информацией в соответствии с пятым вариантом осуществления.
Фиг. 39 является схемой, иллюстрирующей пример размещения на коврике 30 бумаги 44 с записанной специальной информацией в соответствии с пятым вариантом осуществления.
Фиг. 40 является схемой, иллюстрирующей пример, в котором тележка 20 расположена на бумаге 44.
Фиг. 41 является схемой, иллюстрирующей пример книги 70, включающей в себя множество ковриков 30 согласно шестому варианту осуществления.
Фиг. 42 является схемой, иллюстрирующей пример перемещения тележки 20 из углубления в коврике 30 согласно шестому варианту осуществления.
Фиг. 43 является схемой, иллюстрирующей техническую задачу седьмого варианта осуществления.
Фиг. 44 является схемой, иллюстрирующей пример меню выбора игры согласно восьмому варианту осуществления.
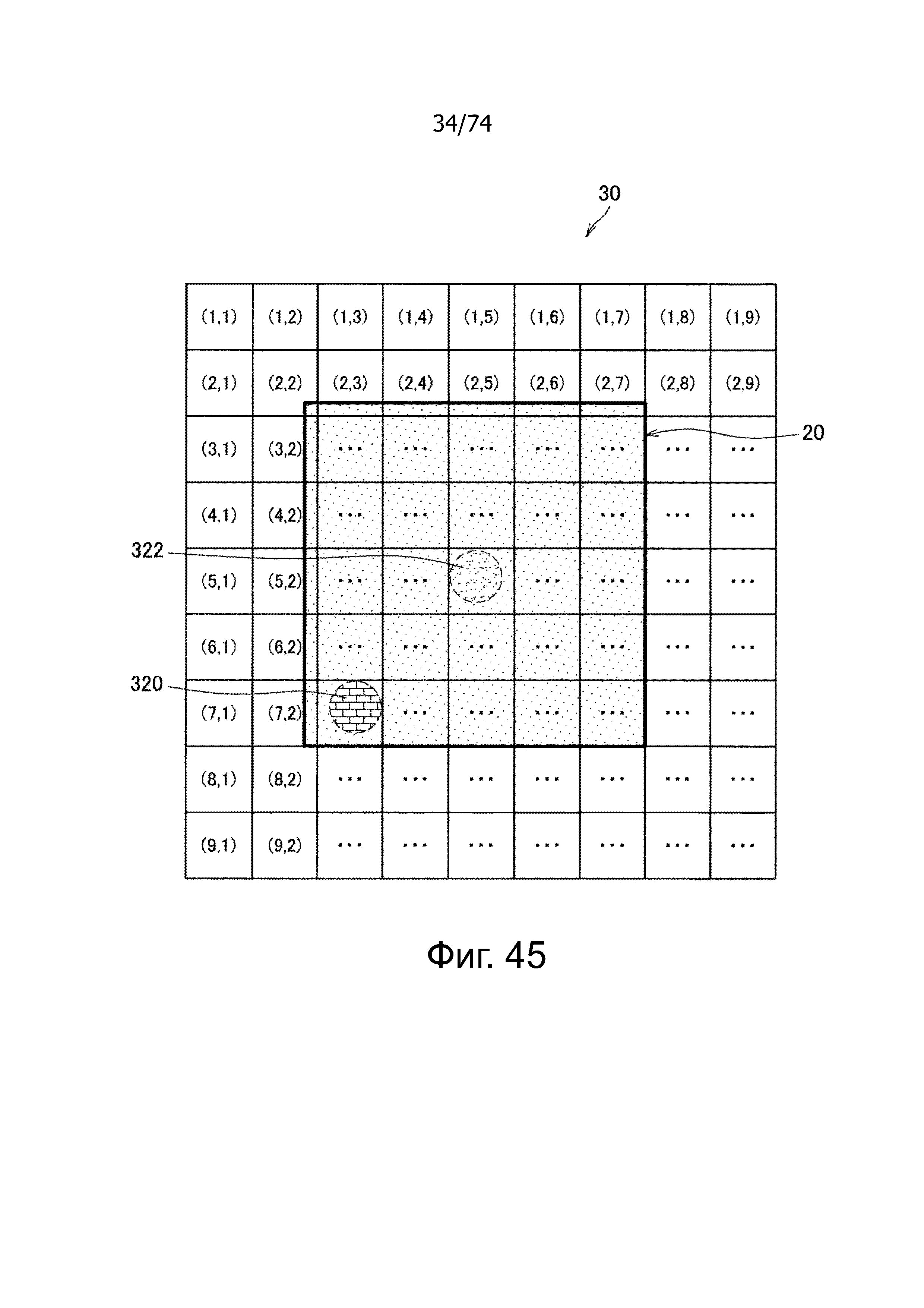
Фиг. 45 является схемой, иллюстрирующей техническую задачу девятого варианта осуществления.
Фиг. 46 является схемой, иллюстрирующей пример конфигурации устройства 10 для обработки информации в соответствии с девятым вариантом осуществления.
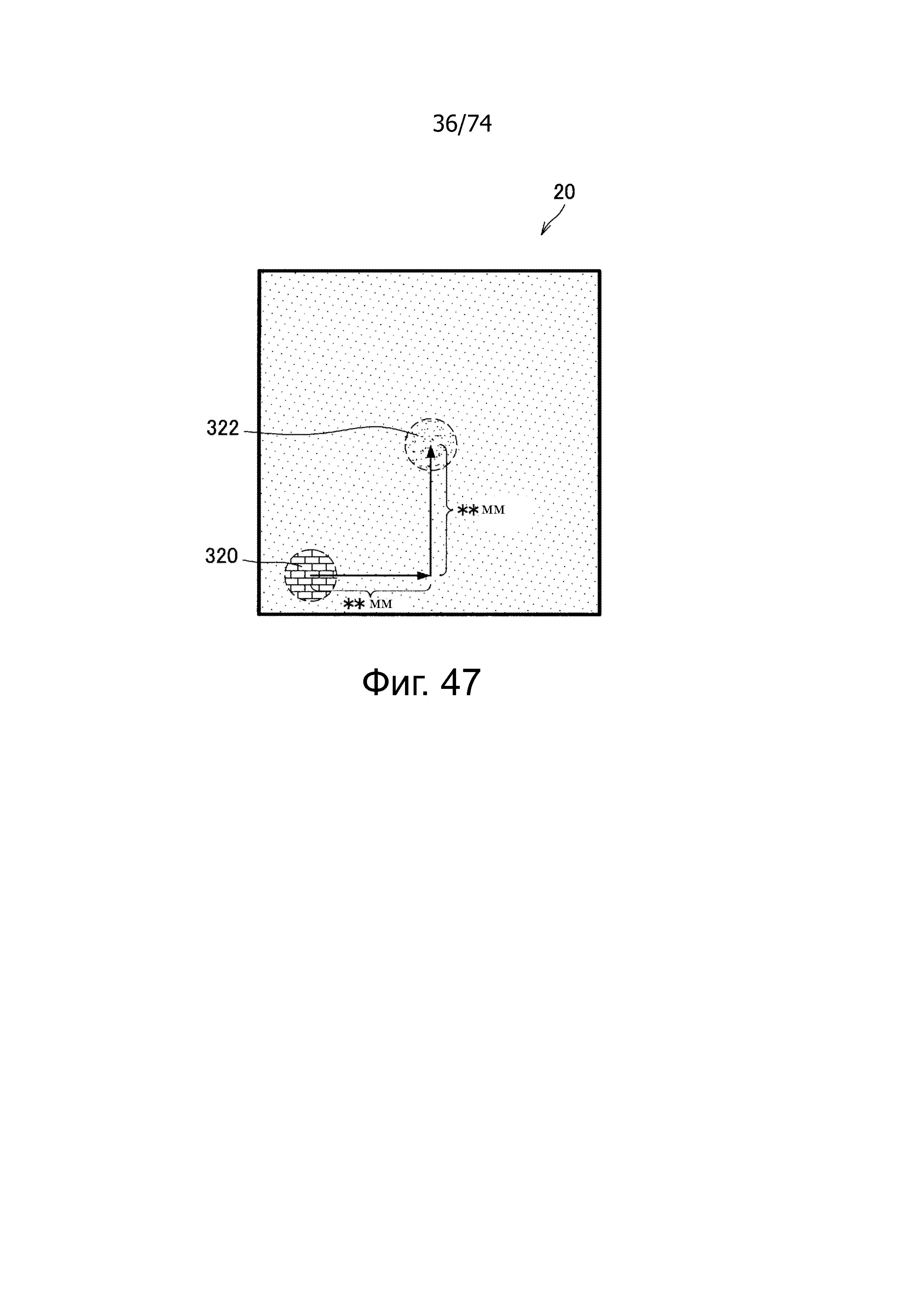
Фиг. 47 является схемой, иллюстрирующей пример указания информации положения, по существу, центра тележки 20 согласно девятому варианту осуществления.
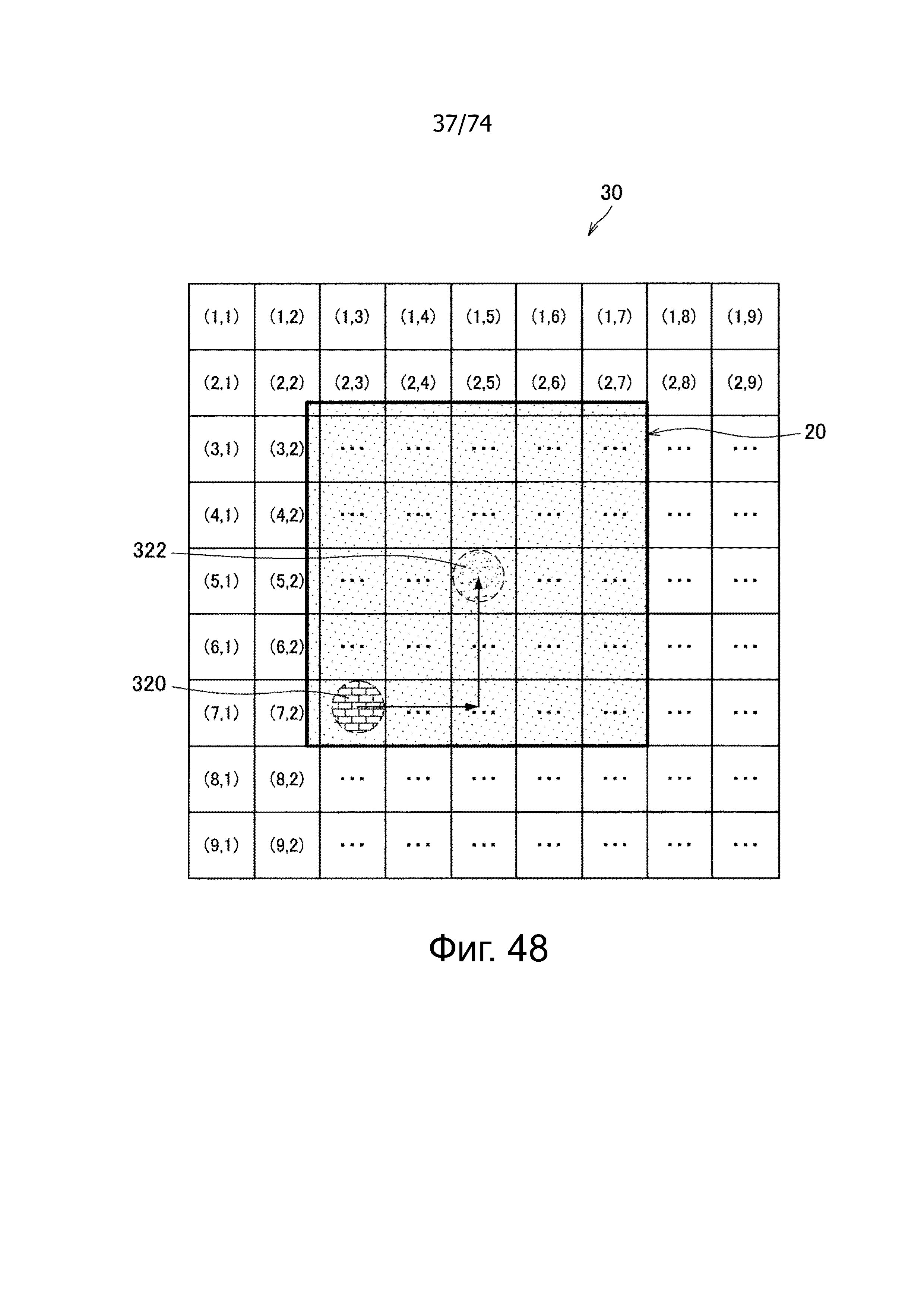
Фиг. 48 является схемой, иллюстрирующей пример задания информации положения, по существу, центра тележки 20 согласно девятому варианту осуществления.
Фиг. 49 является схемой, иллюстрирующей пример парного соединения операционного блока 124 и тележки 20 согласно десятому варианту осуществления.
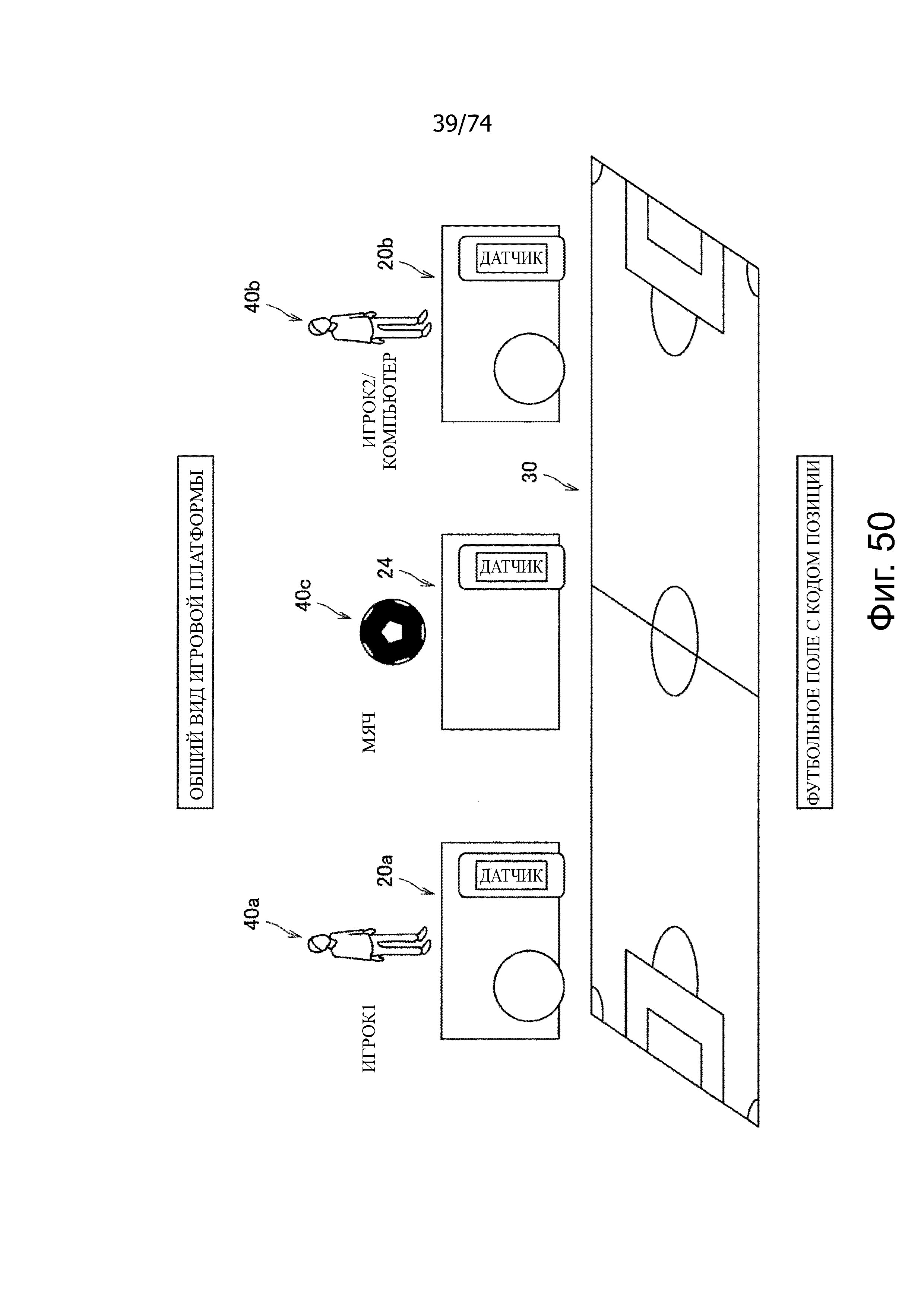
Фиг. 50 является схемой, иллюстрирующей пример платформы игры в футбол согласно одиннадцатому варианту осуществления.
Фиг. 51 является примером видов снизу тележки 24 спортивной игры с мячом согласно одиннадцатому варианту осуществления.
Фиг. 52 является схемой, иллюстрирующей пример управления перемещением тележки 20 игрока в соответствии с одиннадцатым вариантом осуществления.
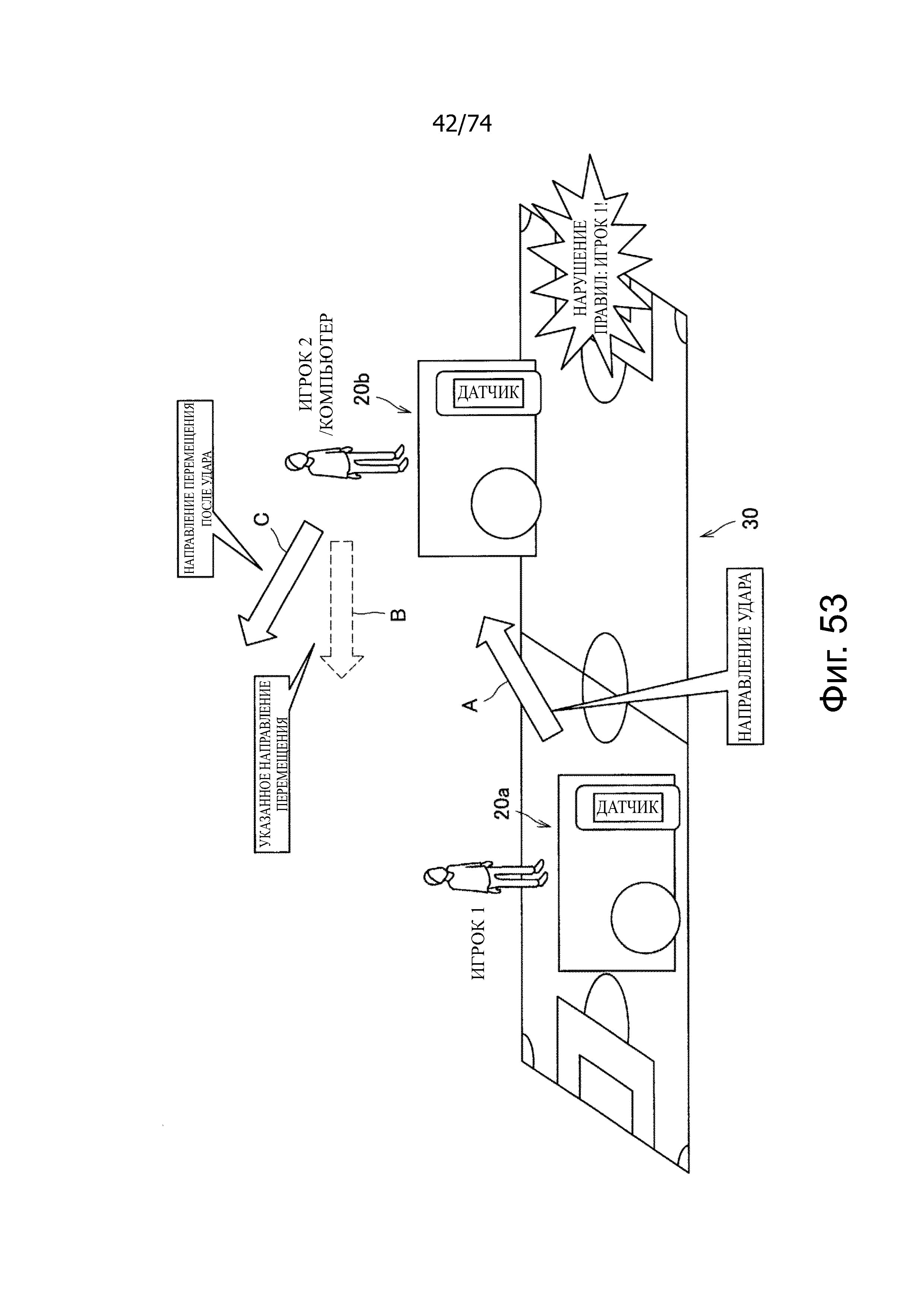
Фиг. 53 является схемой, иллюстрирующей пример определения нарушения правил игры согласно одиннадцатому варианту осуществления.
Фиг. 54 является схемой, иллюстрирующей пример гоночной игры согласно двенадцатому варианту осуществления.
Фиг. 55 является схемой, иллюстрирующей пример, в котором наклейки 44, соответствующие предметам, расположены на коврике 30 согласно двенадцатому варианту осуществления.
Фиг. 56 является схемой, иллюстрирующей пример, в котором наклейка 44, соответствующая предмету, размещена на коврике 30 согласно двенадцатому варианту осуществления.
Фиг. 57 является схемой, иллюстрирующей пример управления перемещением тележки 20, столкнувшаяся с другой тележкой 20 согласно двенадцатому варианту осуществления.
Фиг. 58 является схемой, иллюстрирующей пример сенсорного меню 54 для изменения условий окружающей среды в гоночной игре согласно двенадцатому варианту осуществления.
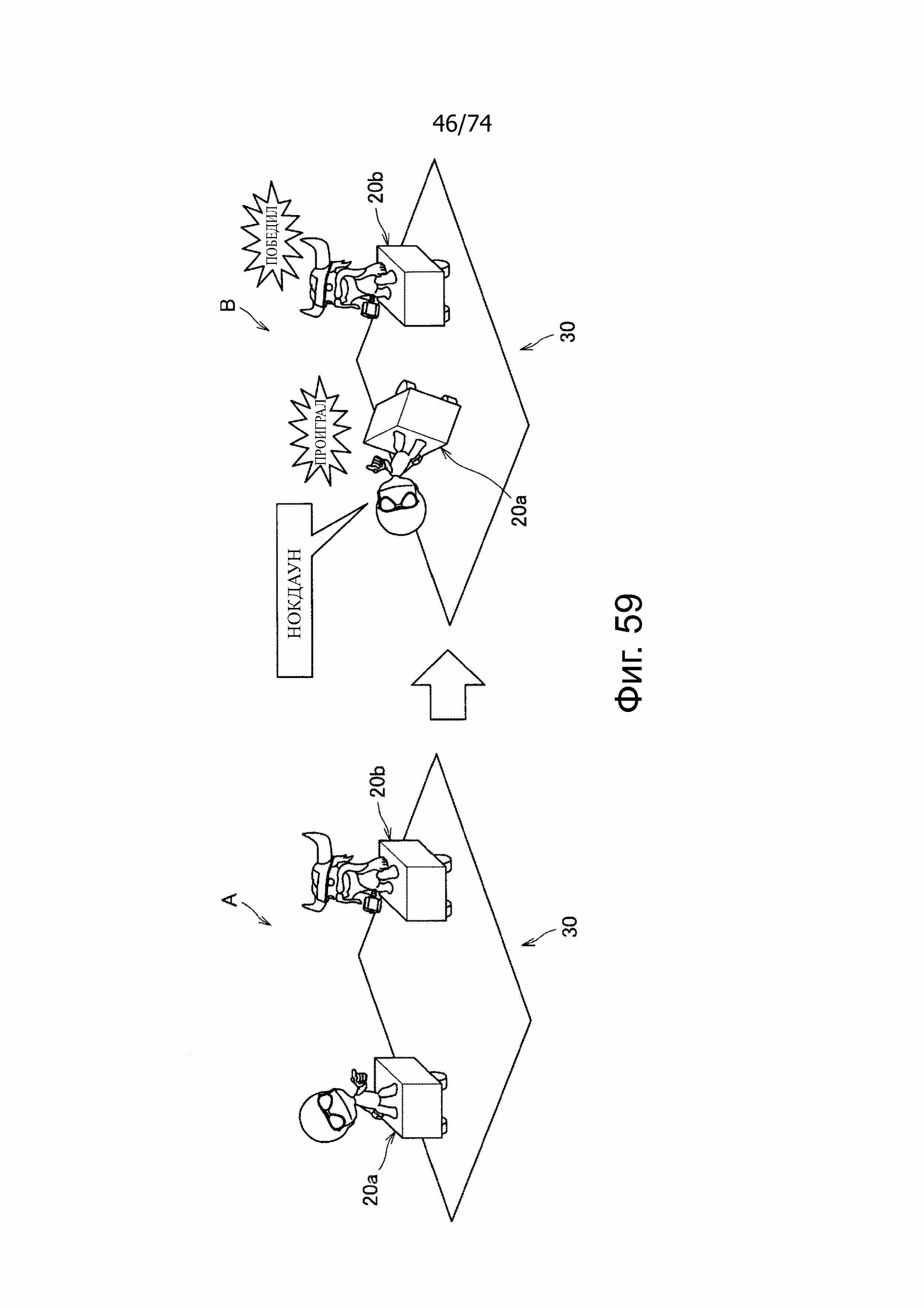
Фиг. 59 является схемой, иллюстрирующей пример определения победы или поражения тележек 20 согласно тринадцатому варианту осуществления.
Фиг. 60 является схемой, иллюстрирующей пример определения победы или поражения тележек 20 согласно тринадцатому варианту осуществления.
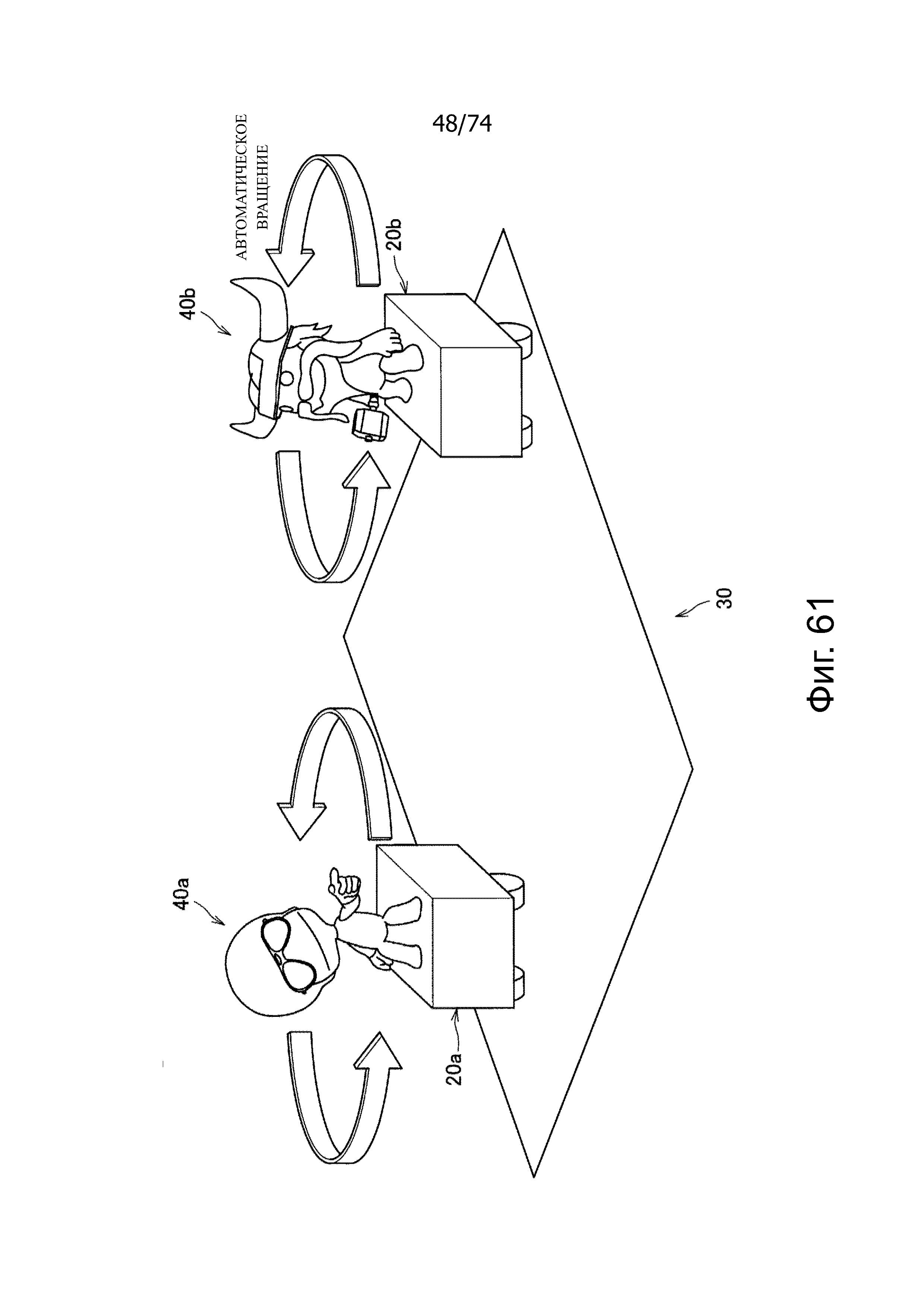
Фиг. 61 является схемой, иллюстрирующей пример схватки, включающей в себя вращение игрушки 40 согласно тринадцатому варианту осуществления.
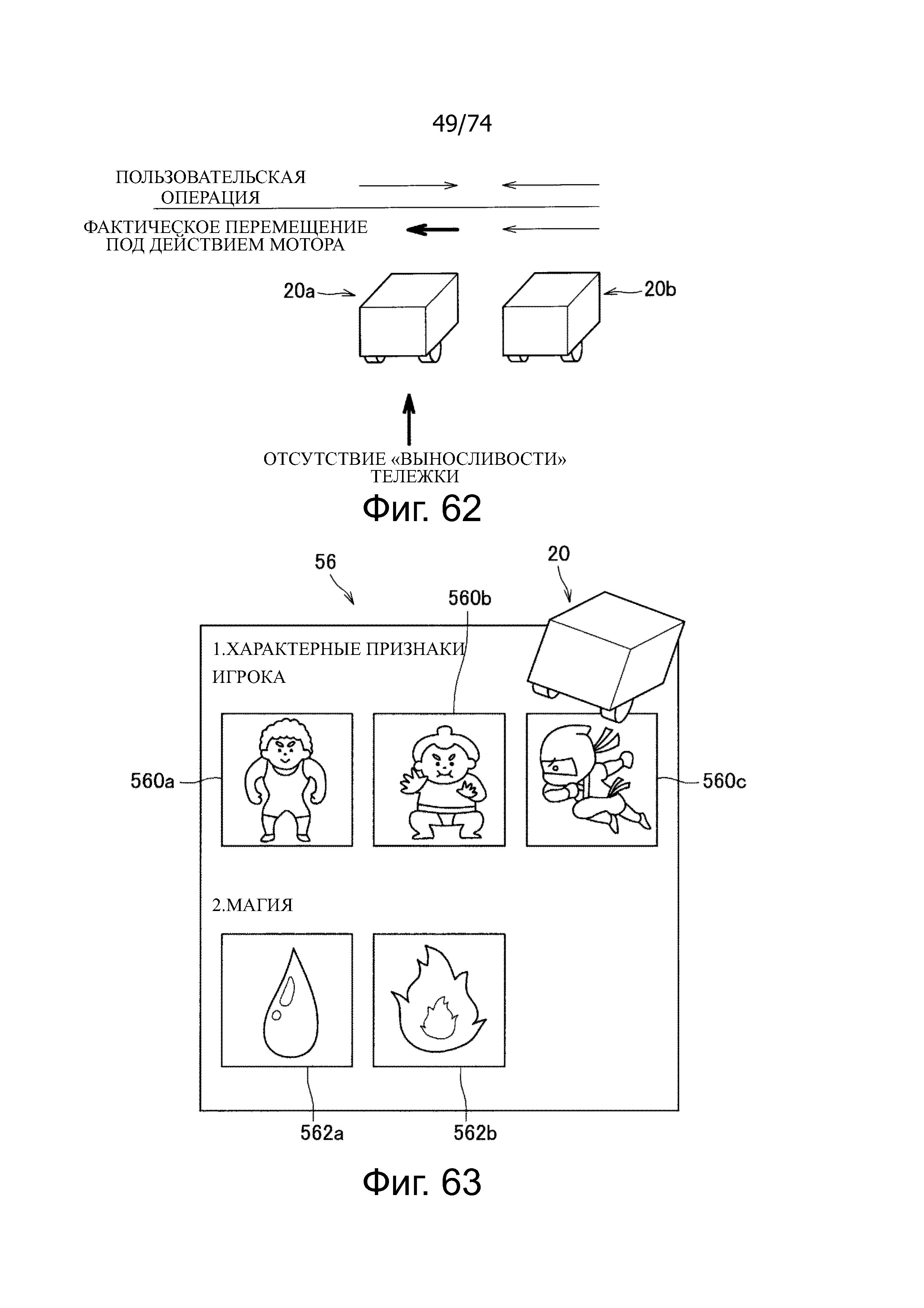
Фиг. 62 является схемой, иллюстрирующей пример управления тележками 20 на основании значений выносливости, ассоциированных с тележками 20, согласно тринадцатому варианту осуществления.
Фиг. 63 является схемой, иллюстрирующей пример карты 56 атрибутов для изменения информации атрибутов, ассоциированных с тележкой 20, согласно тринадцатому варианту осуществления.
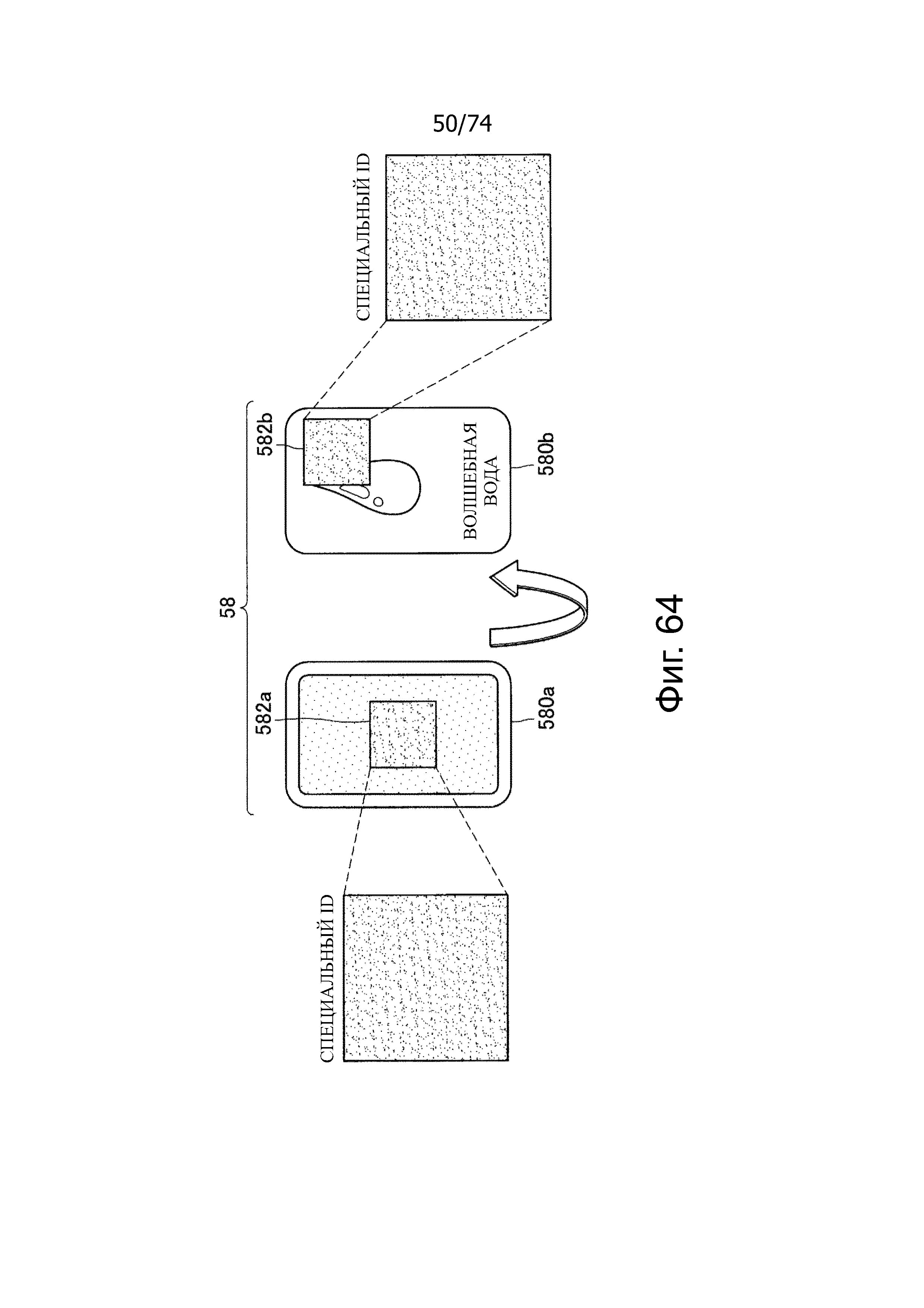
Фиг. 64 является схемой, иллюстрирующей пример карты 58 атрибутов, включающей в себя шаблоны расстановок, напечатанные на обеих поверхностях, согласно тринадцатому варианту осуществления.
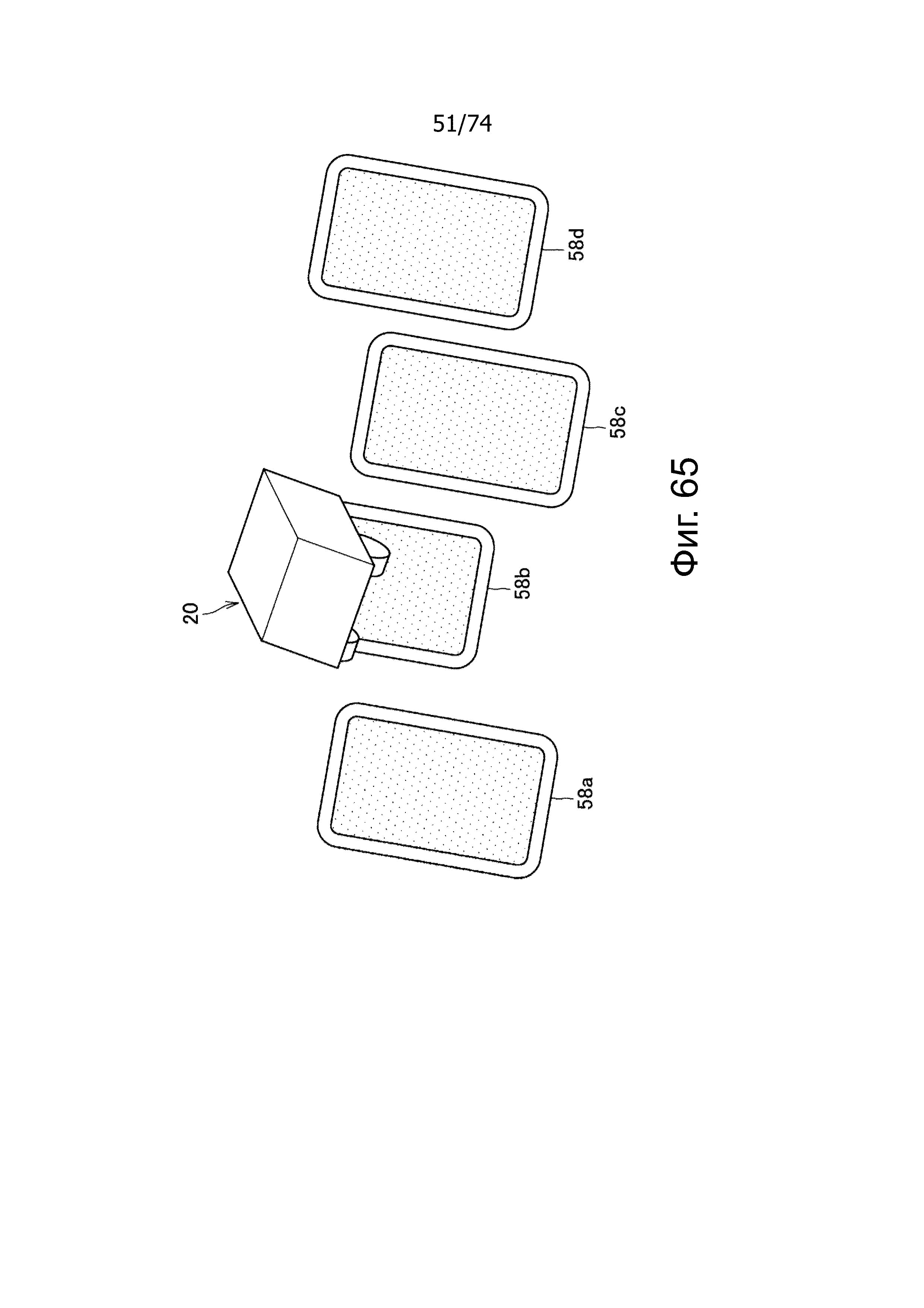
Фиг. 65 является схемой, иллюстрирующей пример ассоциированной информации, записанной в карточках атрибута 58 и тележке 20 согласно тринадцатому варианту осуществления.
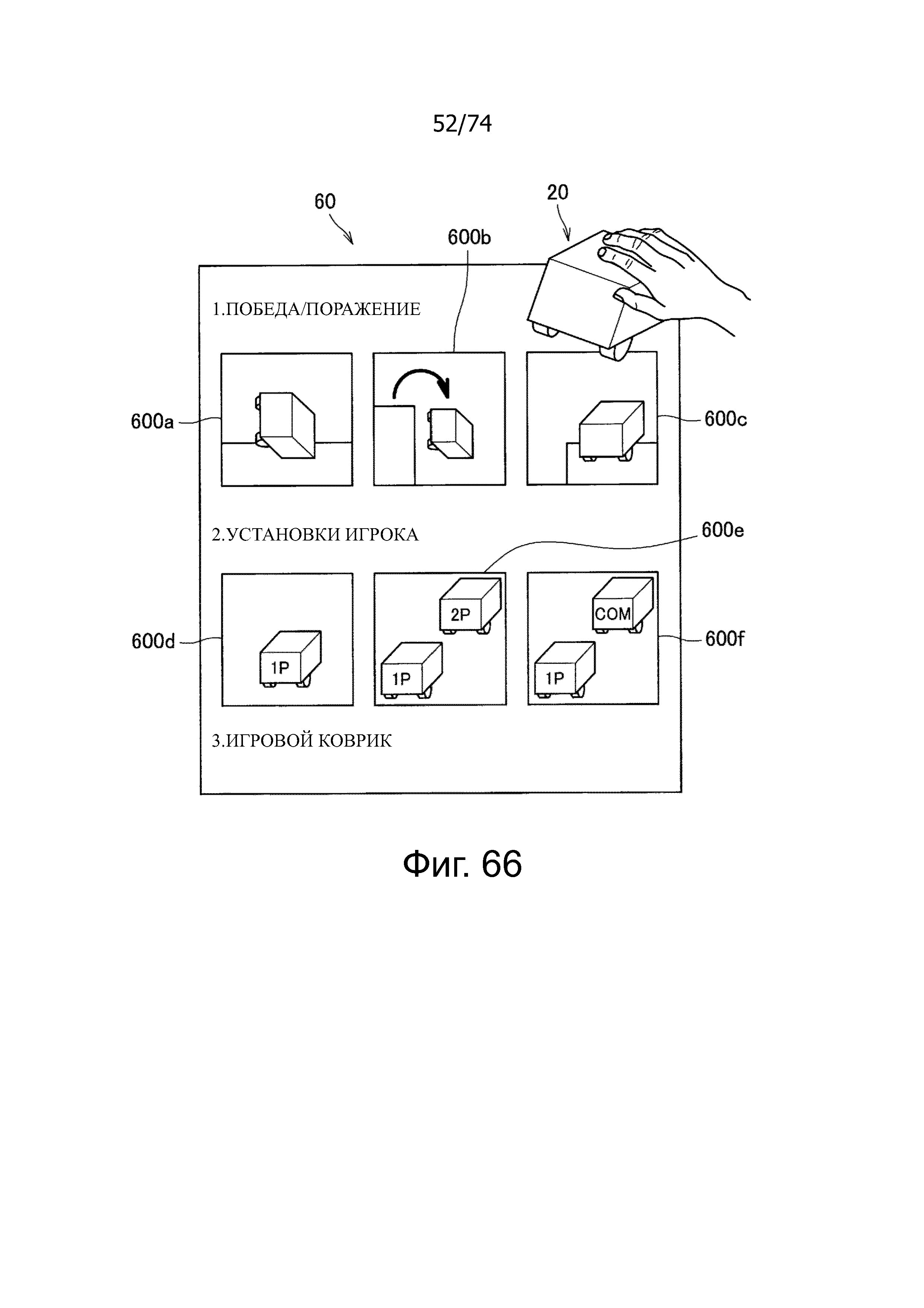
Фиг. 66 является схемой, иллюстрирующей пример меню 60 выбора правила согласно четырнадцатому варианту осуществления.
Фиг. 67 является схемой, иллюстрирующей пример игры-лабиринта согласно пятнадцатому варианту осуществления.
Фиг. 68 является схемой, иллюстрирующей примеры клавиш 62 согласно пятнадцатому варианту осуществления.
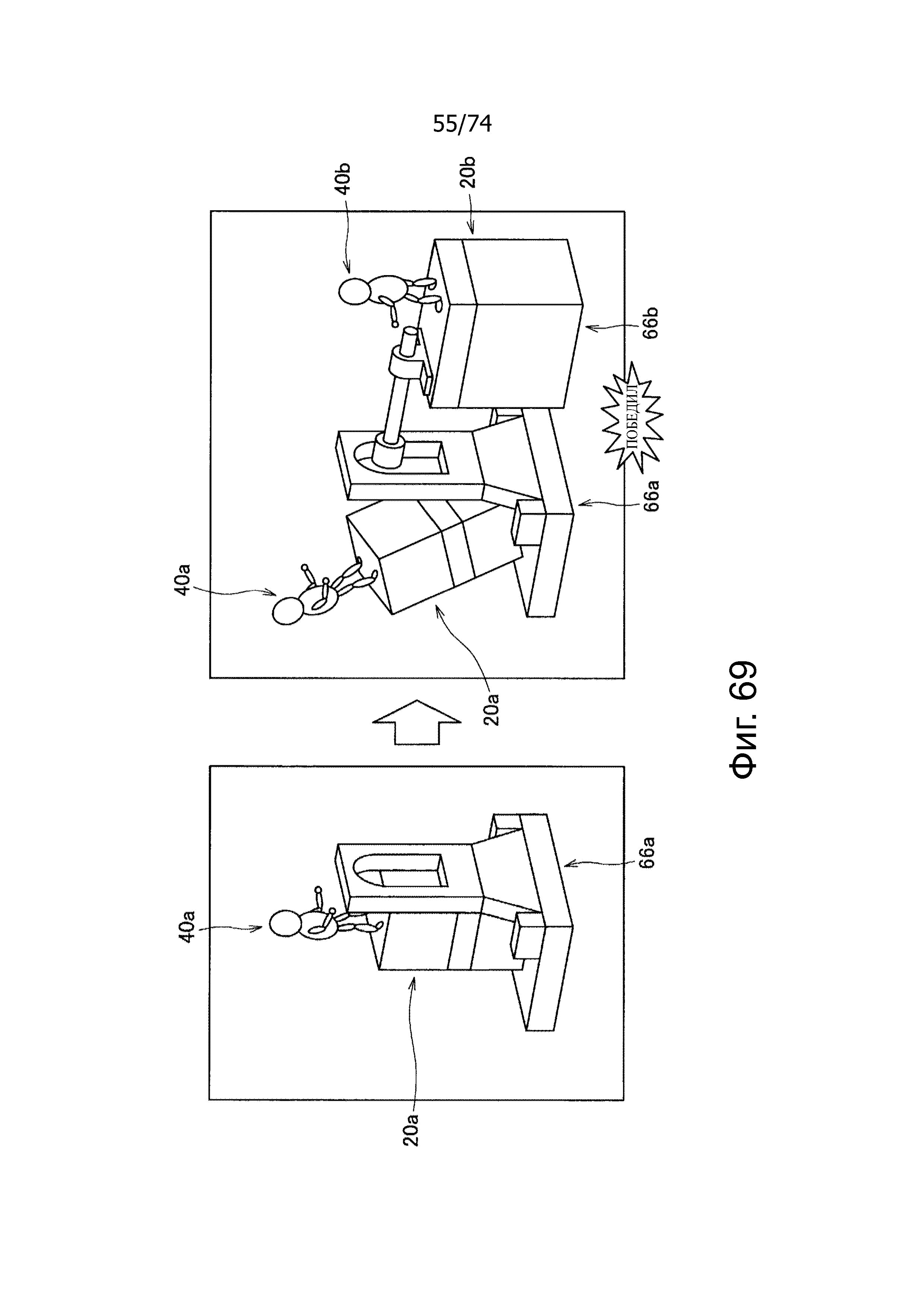
Фиг. 69 является схемой, иллюстрирующей пример игры осады крепости в соответствии с шестнадцатым вариантом осуществления.
Фиг. 70 является схемой, иллюстрирующей первый пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
Фиг. 71 является схемой, иллюстрирующей второй пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
Фиг. 72 является схемой, иллюстрирующей второй пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
Фиг. 73 является схемой, иллюстрирующей второй пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
Фиг. 74 является схемой, иллюстрирующей третий пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
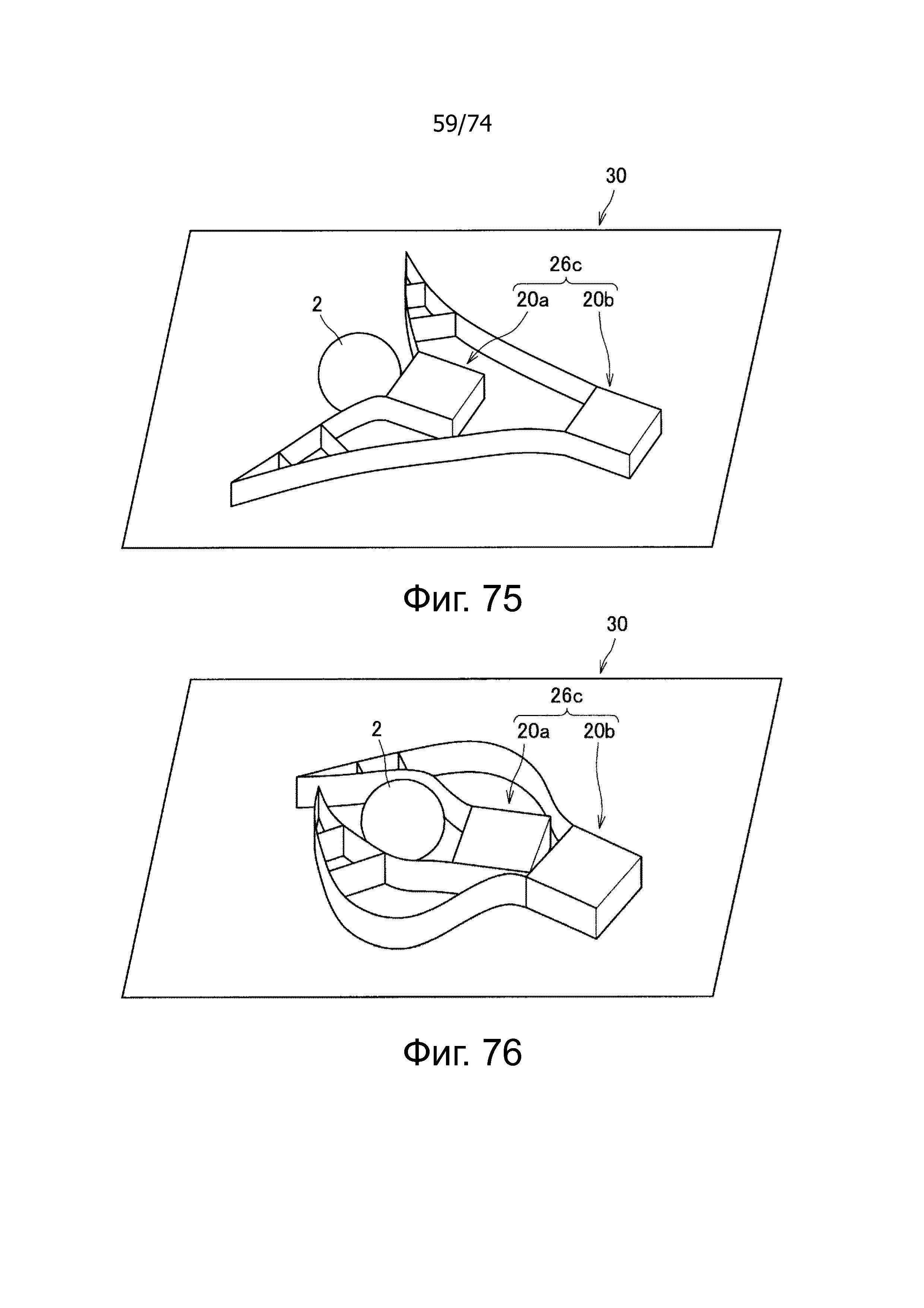
Фиг. 75 является схемой, иллюстрирующей третий пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
Фиг. 76 является схемой, иллюстрирующей третий пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
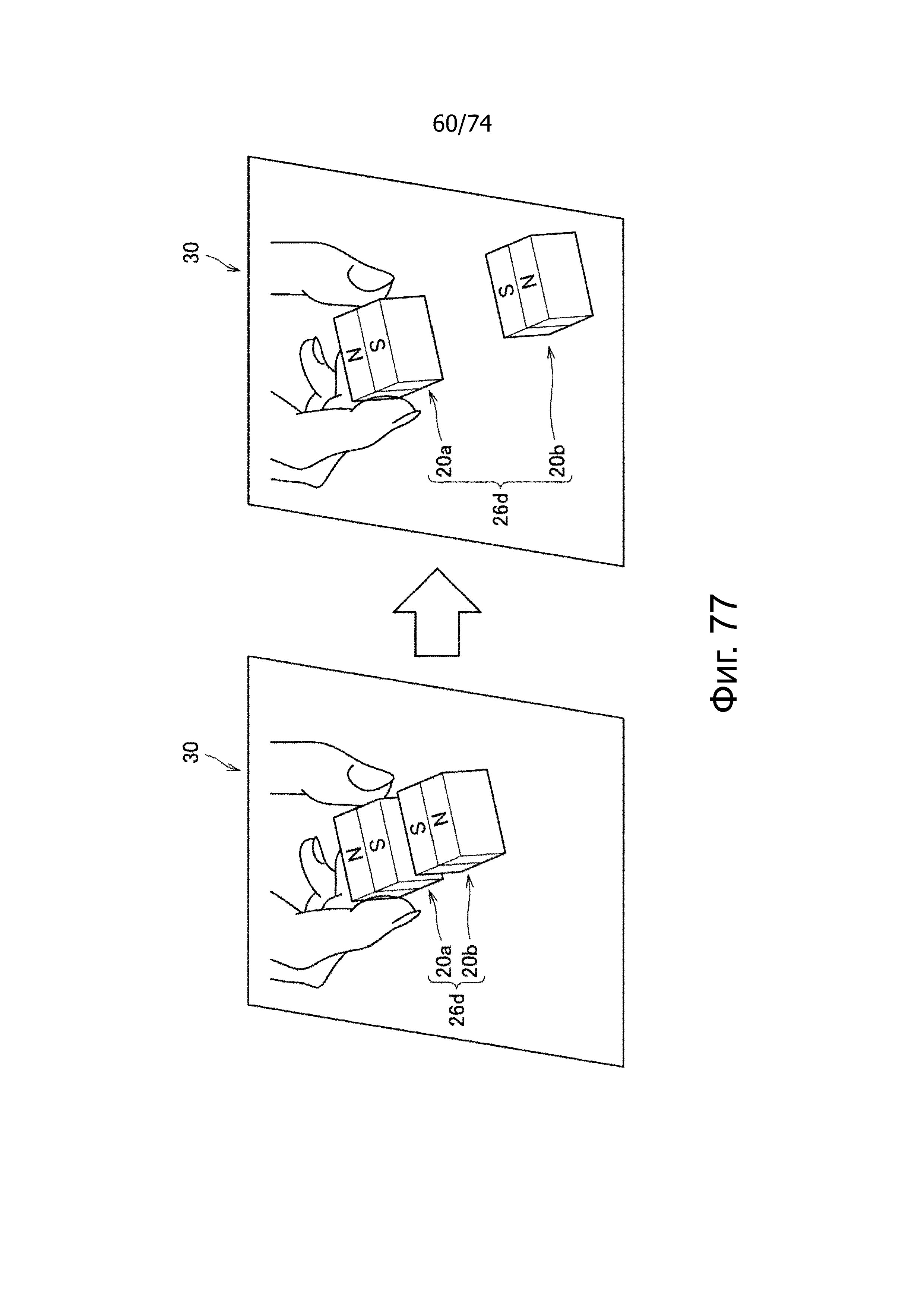
Фиг. 77 является схемой, иллюстрирующей четвертый пример совместного управления двумя тележками 20 согласно семнадцатому варианту осуществления.
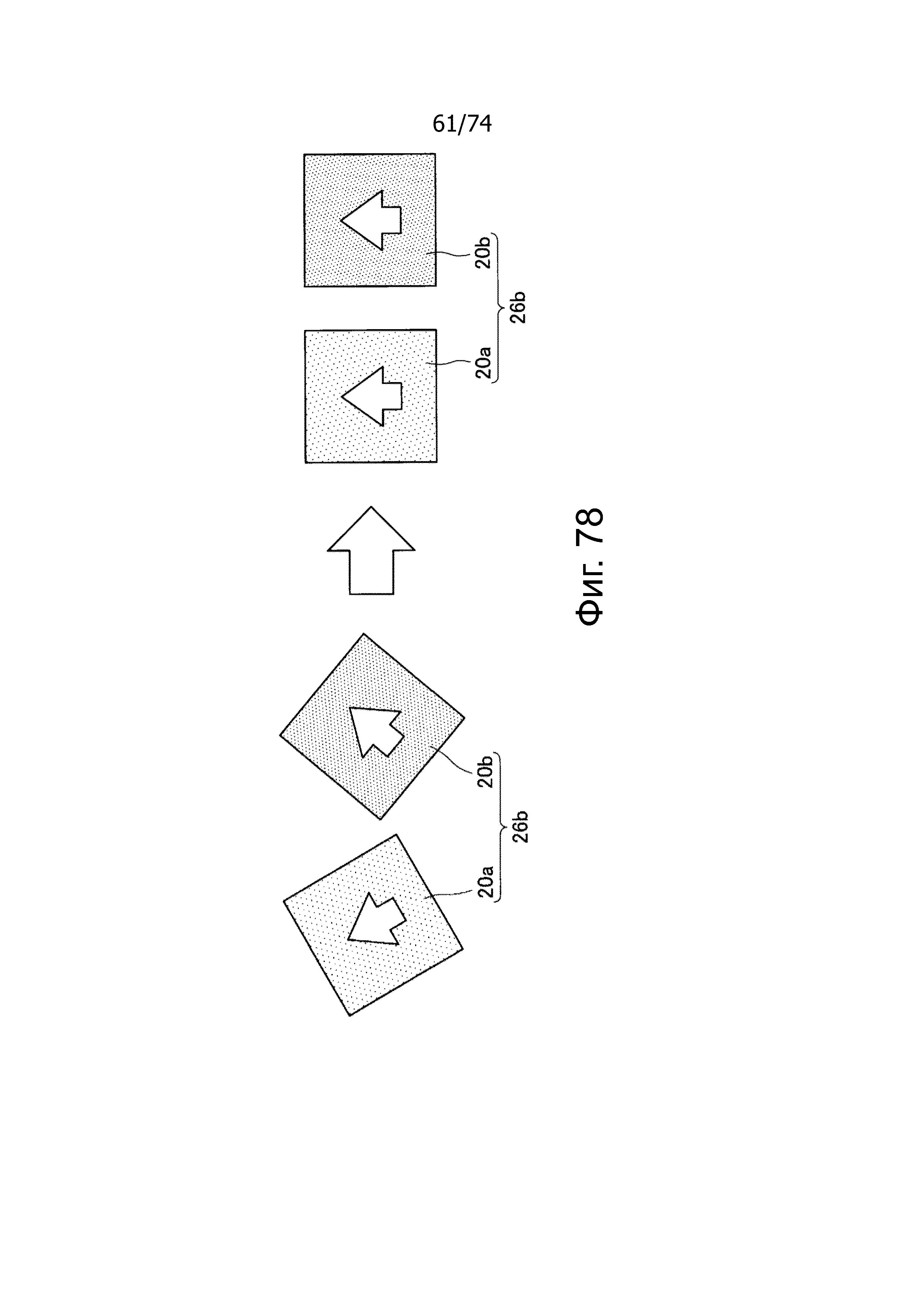
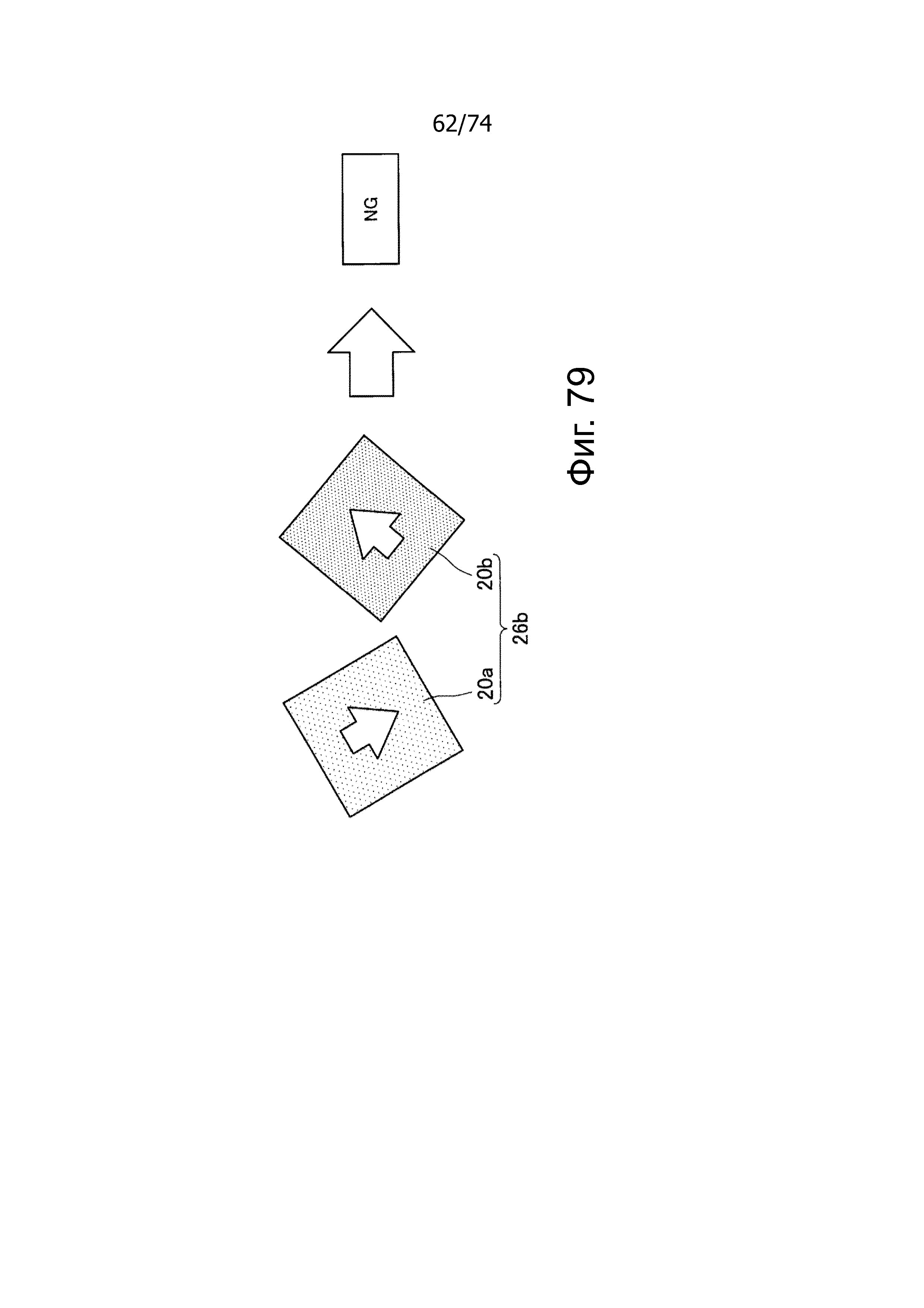
Фиг. 78 является схемой, иллюстрирующей пример изменения позиционного соотношения между двумя тележками 20 согласно семнадцатому варианту осуществления.
Фиг. 79 является схемой, иллюстрирующей пример, когда позиционное соотношение между двумя тележками 20 не может быть изменено согласно семнадцатому варианту осуществления.
Фиг. 80 является схемой, иллюстрирующей пример корректировки направлений перемещения тележек 20 согласно семнадцатому варианту осуществления.
Фиг. 81 является схемой, иллюстрирующей ситуацию, в которой тележка 20 коснулась другого объекта.
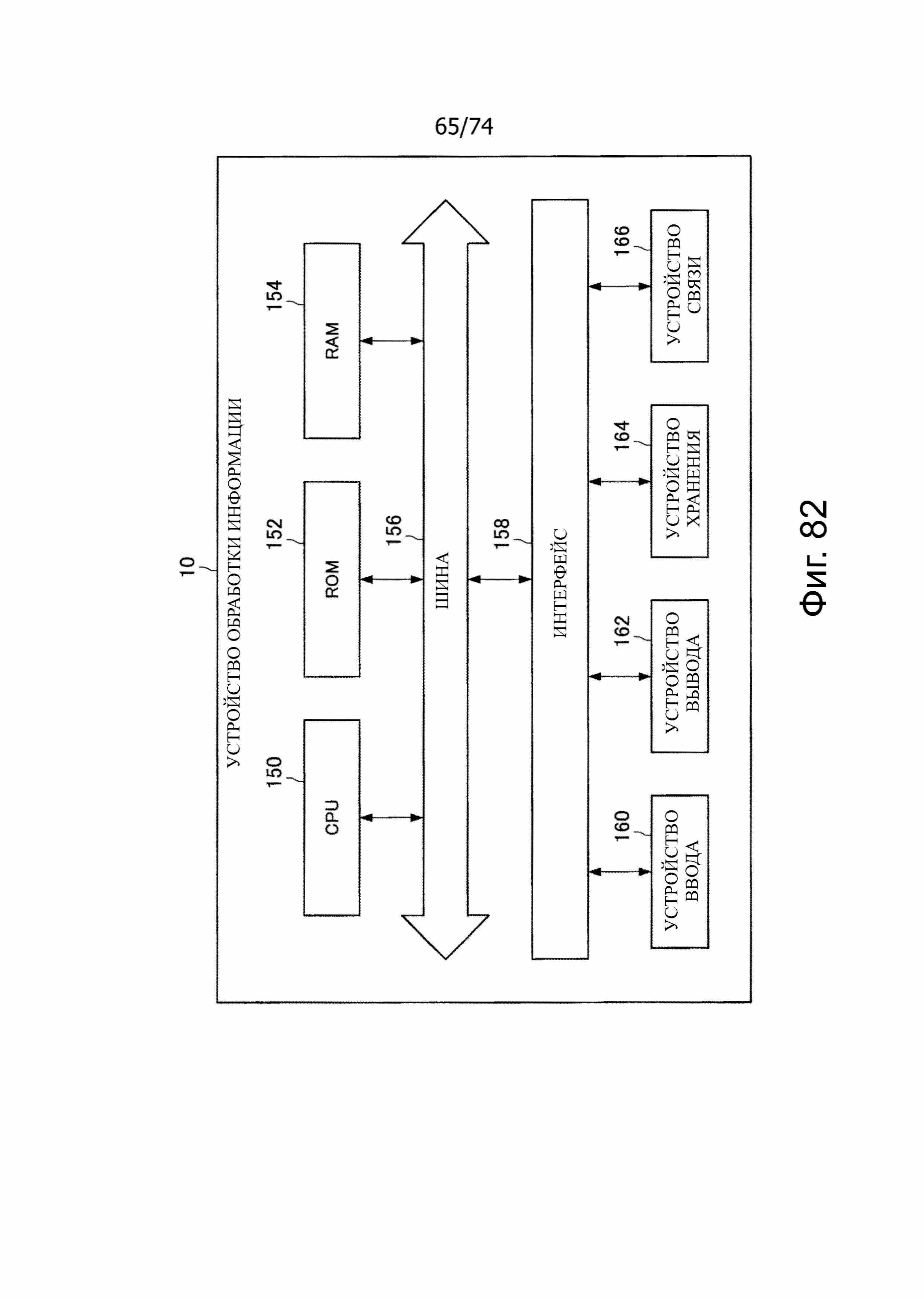
Фиг. 82 является пояснительной схемой, иллюстрирующей пример конфигурации аппаратных средств устройства 10 для обработки информации, общего для вариантов осуществления.
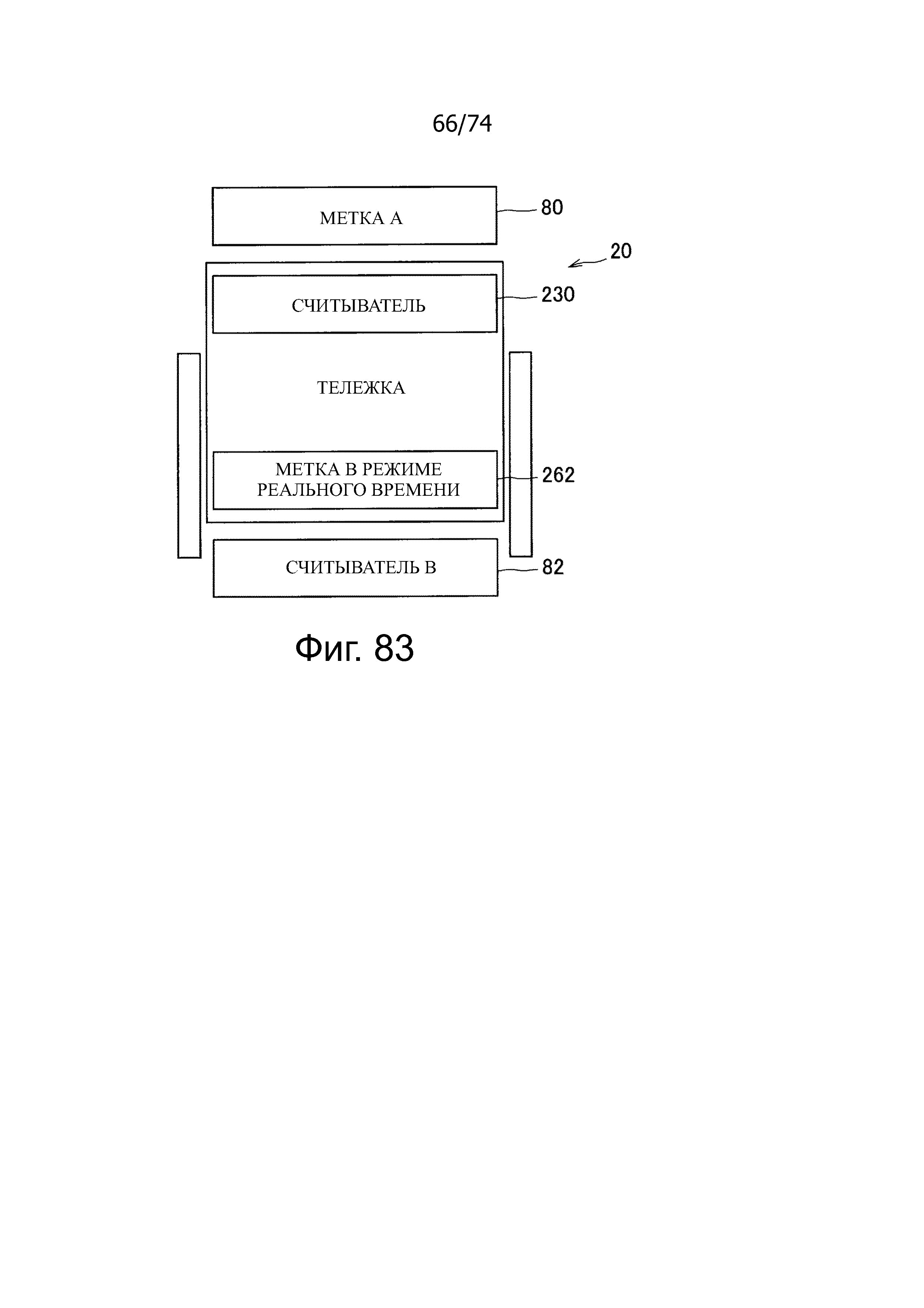
Фиг. 83 является схемой, иллюстрирующей пример тележки 20, снабженной блоком 230 беспроводной связи ближнего радиуса действия согласно модификации 1 настоящего изобретения.
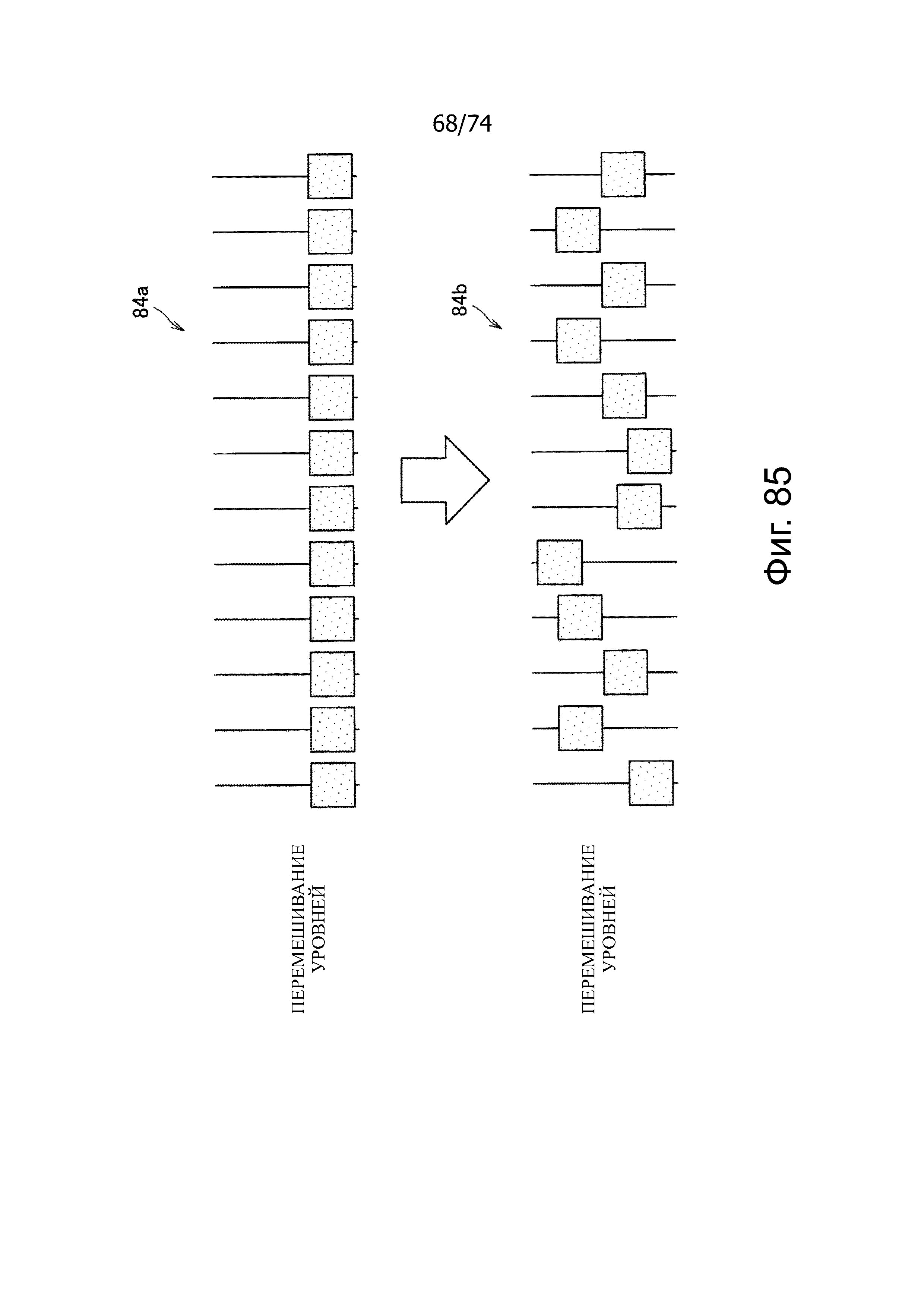
Фиг. 84 является схемой, иллюстрирующей пример использования тележки 20 в качестве пользовательского интерфейса.
Фиг. 85 является схемой, иллюстрирующей пример использования тележки 20 в качестве пользовательского интерфейса.
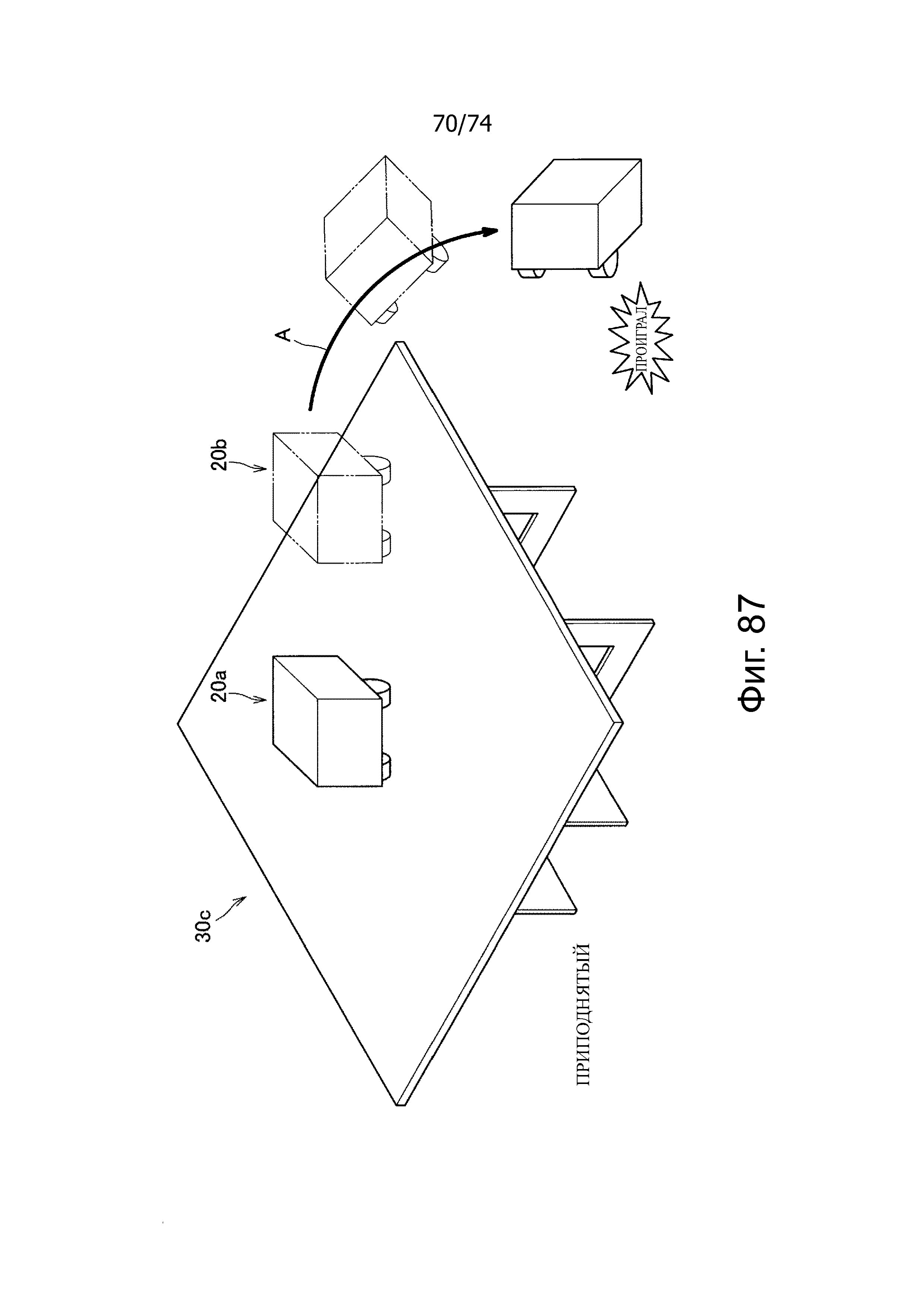
Фиг. 86 является схемой, иллюстрирующей пример формы коврика 30 согласно модификации 3 настоящего изобретения.
Фиг. 87 является схемой, иллюстрирующей пример формы коврика 30 согласно модификации 3 настоящего изобретения.
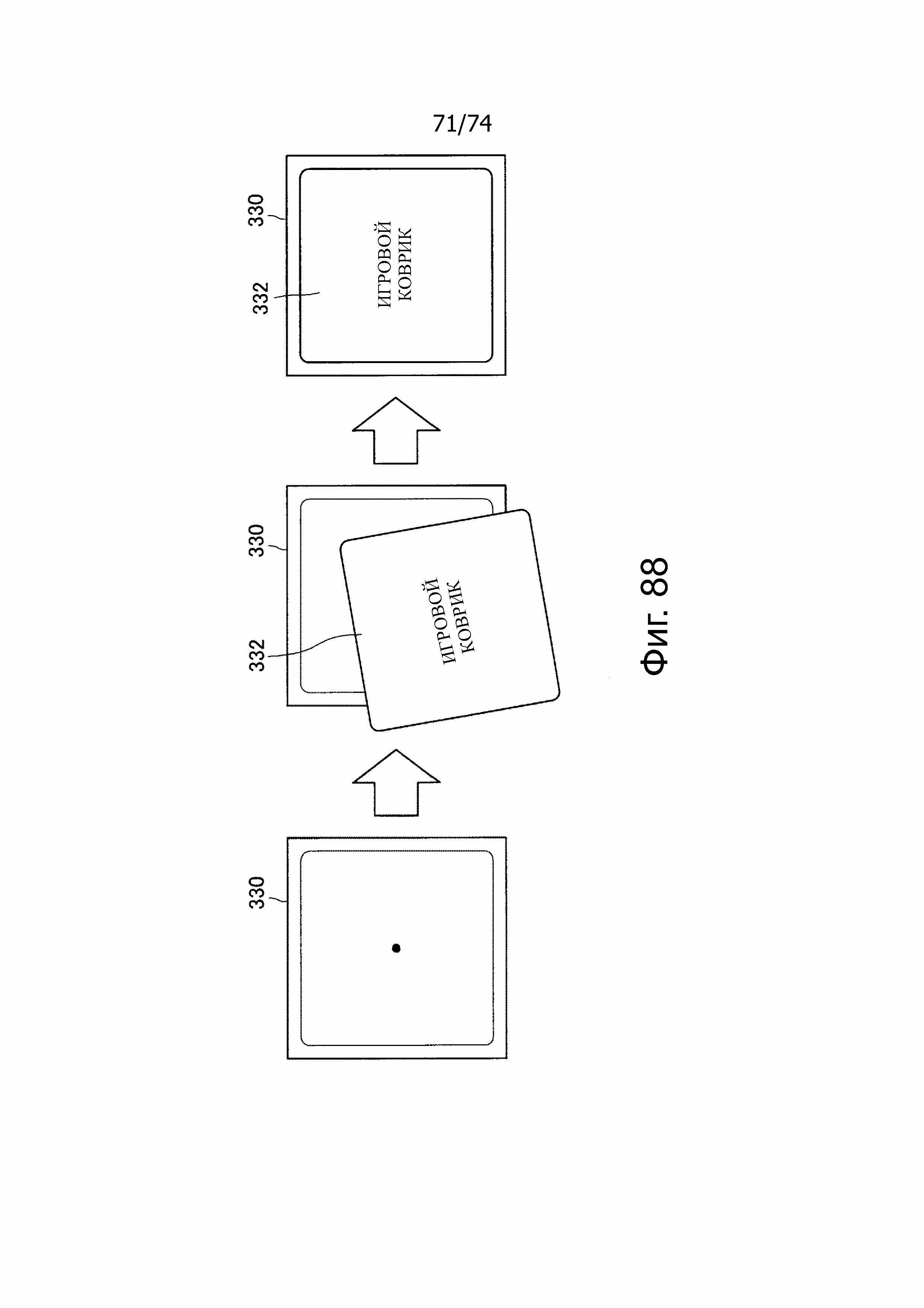
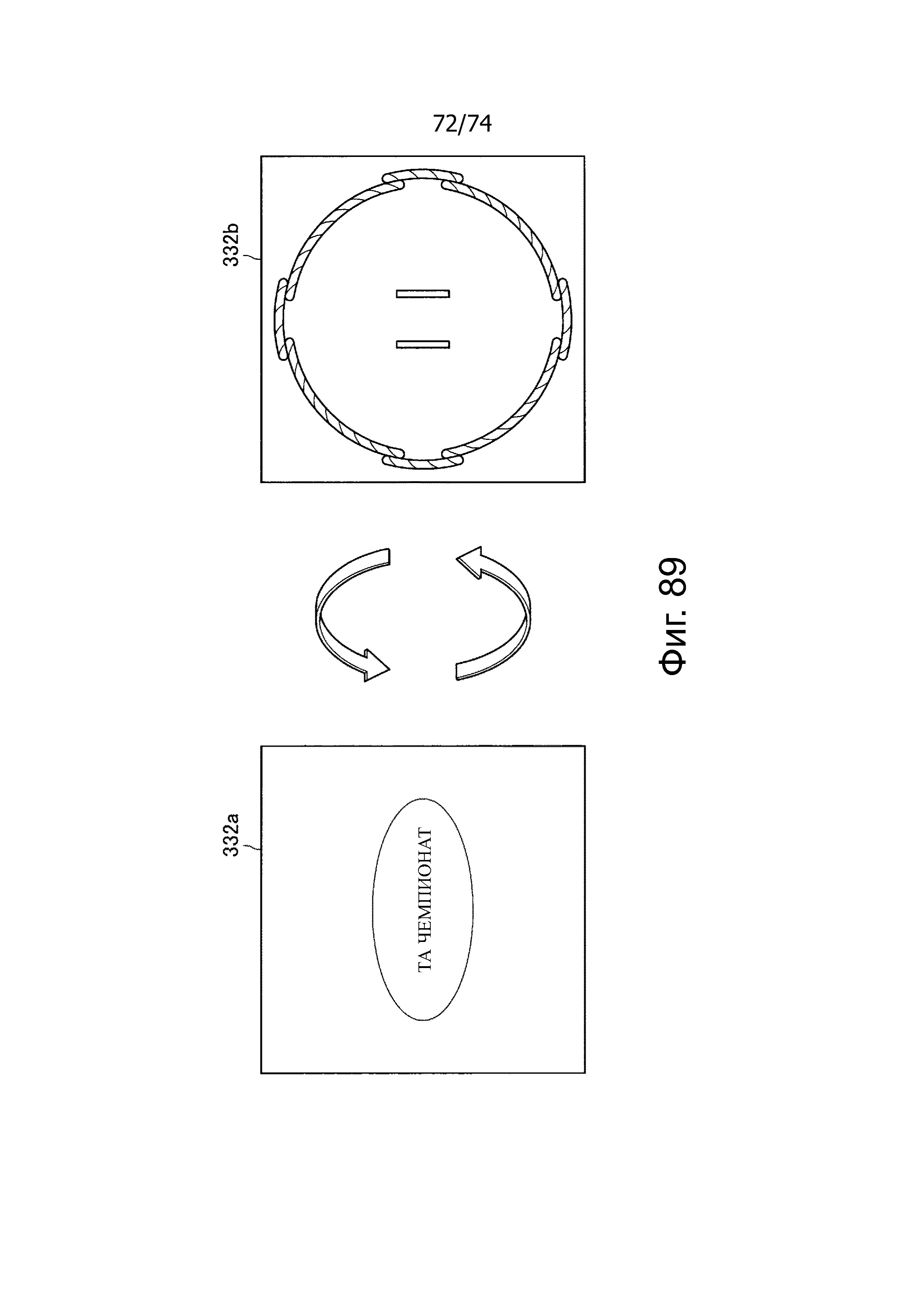
Фиг. 88 является схемой, иллюстрирующей пример формы коврика 30 согласно модификации 4 настоящего изобретения.
Фиг. 89 является схемой, иллюстрирующей пример формы коврика 30 согласно модификации 4 настоящего изобретения.
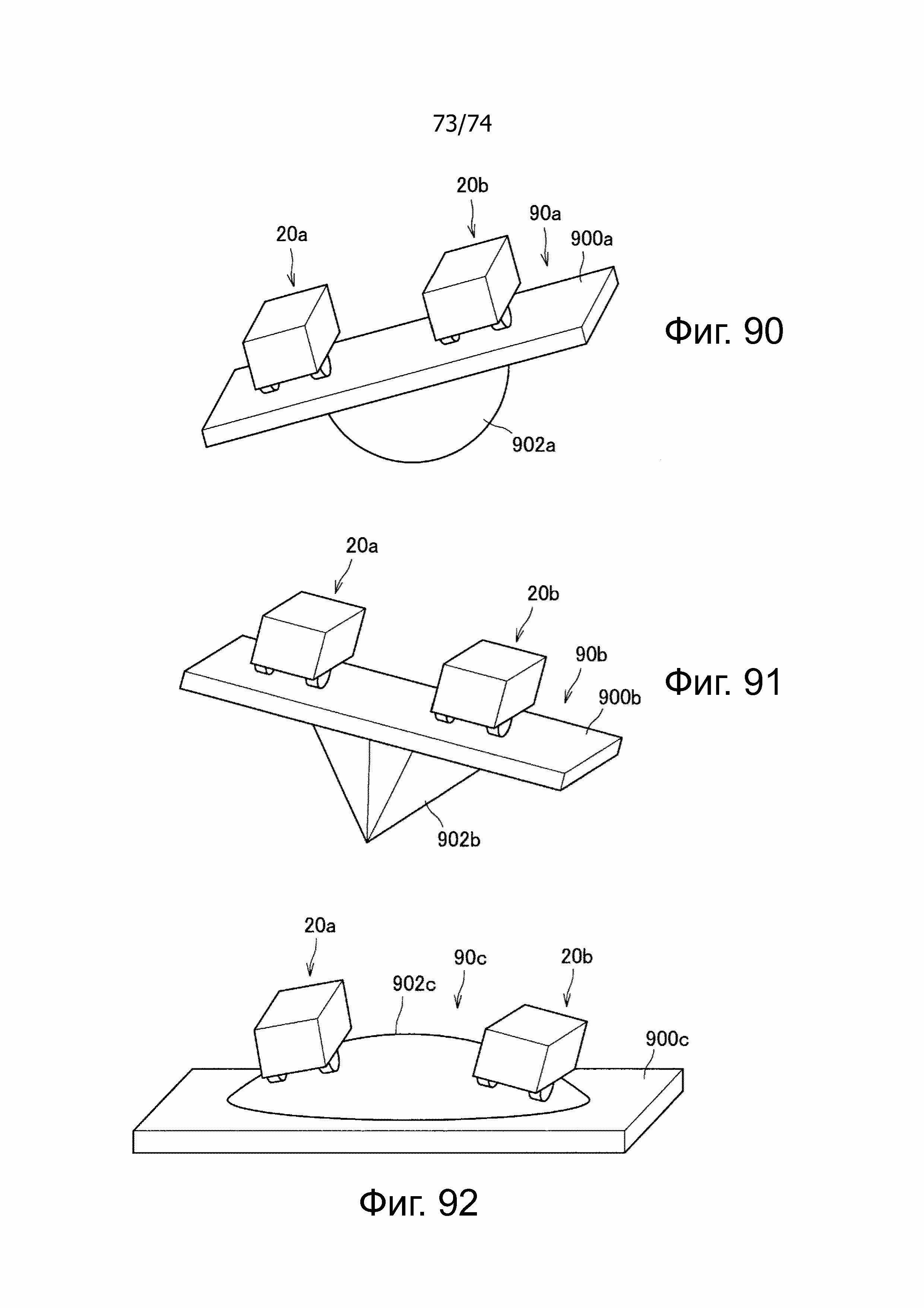
Фиг. 90 является схемой, иллюстрирующей пример формы коврика 90 в соответствии с модификацией 5 настоящего изобретения.
Фиг. 91 является схемой, иллюстрирующей пример формы коврика 90 согласно модификации 5 настоящего изобретения.
Фиг. 92 является схемой, иллюстрирующей пример формы коврика 90 согласно модификации 5 настоящего изобретения.
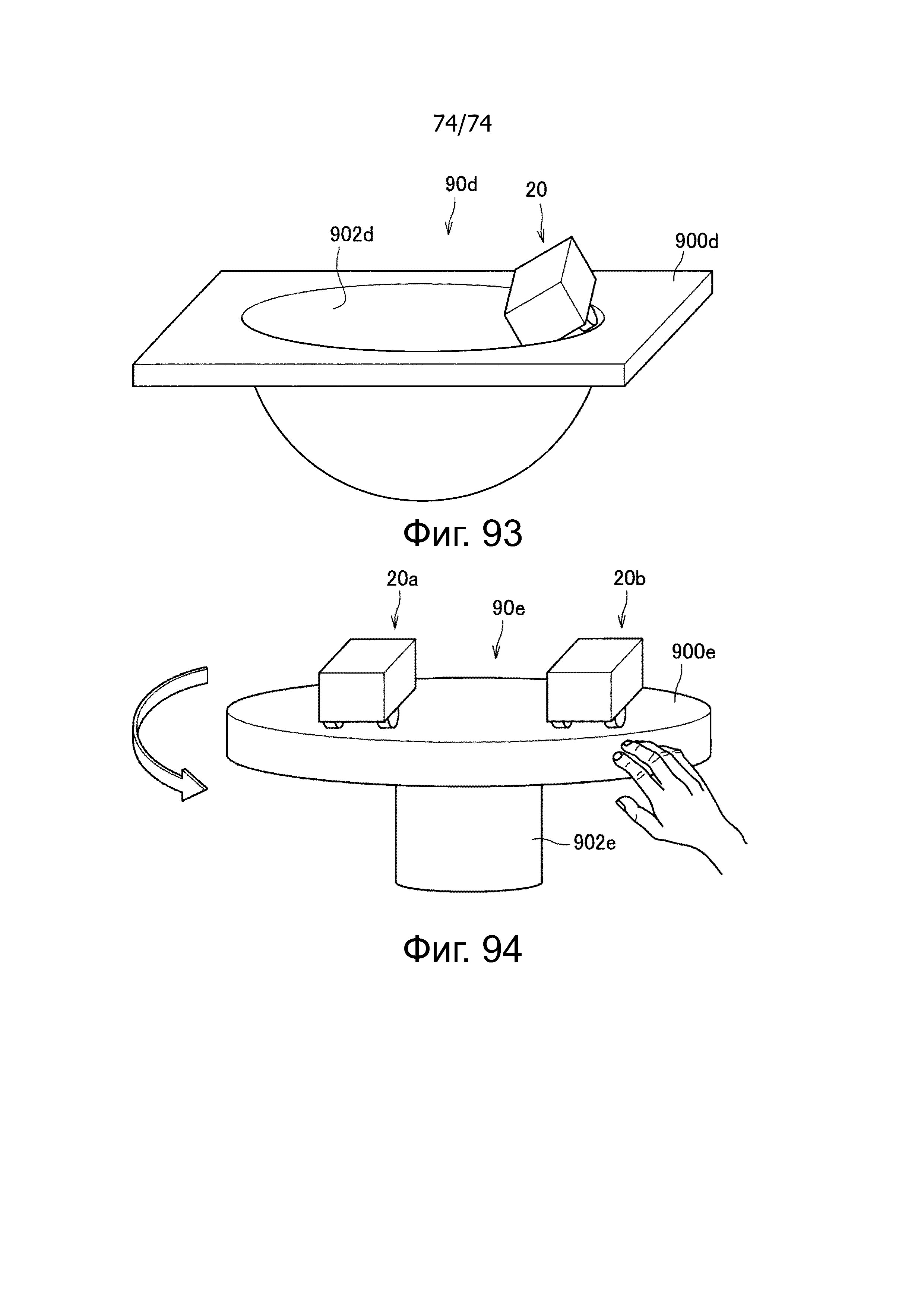
Фиг. 93 является схемой, иллюстрирующей пример формы коврика 90 согласно модификации 5 настоящего изобретения.
Фиг. 94 является схемой, иллюстрирующей пример формы коврика 90 согласно модификации 5 настоящего изобретения.
Осуществление изобретения
Предпочтительные варианты осуществления настоящего изобретения будут подробно описаны со ссылкой на прилагаемые чертежи. Следует отметить, что в настоящем описании и на чертежах одинаковые ссылочные позиции представлены для составляющих элементов, по существу, с одинаковыми функциональными конфигурациями, чтобы избежать повторного описания.
Дополнительно, в настоящем описании и на чертежах для различия множества составляющих элементов, по существу, с одинаковыми функциональными конфигурациями после одной и той же ссылочной позиции могут быть предоставлены различные буквенные обозначения. Например, при необходимости, множество компонентов, имеющих, по существу, одинаковые функциональные конфигурации, различают, как тележка 20а и тележка 20b. Однако в случае, когда каждый из множества составляющих элементов, имеющих, по существу, одинаковые функциональные конфигурации, не требует особого различия, предоставлена только одна и та же ссылочная позиция. Например, тележка 20a и тележка 20b будут просто называться тележками 20 в случае, когда различие не является особенно необходимым.
Дополнительно, раздел «Осуществление изобретения» будет описан в следующем порядке пунктов.
1. Конфигурация системы для обработки информации
2. Первый вариант осуществления
3. Второй вариант осуществления
4. Третий вариант осуществления
5. Четвертый вариант осуществления
6. Пятый вариант осуществления
7. Шестой вариант осуществления
8. Седьмой вариант осуществления
9. Восьмой вариант осуществления
10. Девятый вариант осуществления
11. Десятый вариант осуществления
12. Одиннадцатый вариант воплощения
13. Двенадцатый вариант осуществления
14. Тринадцатый вариант осуществления
15. Четырнадцатый вариант осуществления
16. Пятнадцатый вариант осуществления
17. Шестнадцатый вариант осуществления
18. Семнадцатый вариант осуществления
19. Конфигурация аппаратного обеспечения
20. Модификации
1. Конфигурация системы для обработки информации
Прежде всего, со ссылкой на фиг. 1 будет описан пример конфигурации системы для обработки информации, общей для вариантов осуществления настоящего изобретения. Как показано на фиг. 1, система для обработки информации, общая для вариантов осуществления, включает в себя устройство 10 для обработки информации, одну или несколько тележек 20 и коврик 30.
1-1. Устройство 10 для обработки информации
Устройство 10 для обработки информации представляет собой устройство, которое управляет перемещением одной или нескольких тележек 20. Устройство 10 для обработки информации может дополнительно управлять выполнением различных приложений, таких как игровое приложение. Например, устройство 10 для обработки информации управляет выполнением игрового приложения, и затем управляет перемещением одной или нескольких тележек 20 во время выполнения игрового приложения. Следует отметить, что, хотя устройство 10 для обработки информации реализовано на аппаратном обеспечении, отличном от тележек 20 на фиг. 1, по меньшей мере, часть конфигурации устройства 10 для обработки информации для управления тележками 20 может быть реализована на тележках 20.
Как показано на фиг. 1, устройство 10 для обработки информации может включать в себя операционные блоки 122, блок 124 отображения и блок 128 подключения кассеты.
1-1-1. Блок 128 подключения кассеты
Блок 128 подключения кассеты представляет собой механизм для подключения кассеты 22. Кассета 22 хранит, например, двоичные данные, видеоданные, музыкальные данные и т.п. различных приложений (таких как игровое приложение).
Например, как только кассета 22 установлена в блоке 128 подключения кассеты, описанный ниже блок 100 управления считывает приложение, сохраненное в кассете 22, и активирует приложение.
1-1-2. Операционные блоки 122
Операционные блоки 122 принимают операцию пользователя, касающуюся, например, перемещения тележек 20. Хотя подробности будут описаны позже, отдельные операционные блоки 122 могут быть ассоциированы с отдельными тележками 20. В этом случае, операционные блоки 122 могут принимать операции для тележек 20, ассоциированные с операционными блоками 122. Дополнительно, устройство 10 для обработки информации может управлять перемещением тележек 20 в соответствии с информацией операции, принятой от операционных блоков 122.
1-1-3. Блок 124 отображения
Блок 124 отображения может включать в себя, например, жидкокристаллический дисплей (LCD), органический светодиод (OLED) или тому подобное. Например, блок 124 отображения может быть выполнен как сенсорный дисплей.
Блок 124 отображения отображает различные типы информации (например, информацию состояния и различные типы информации уведомления относительно активированного приложения) в соответствии с управлением блока 100 управления, описанным ниже.
1-2. Коврик 30
Согласно настоящему изобретению коврик 30 является примером первого листообразного носителя информации (information medium). Заданный шаблон расстановки напечатан (записан) на коврике 30. Заданный шаблон расстановки может включать в себя первый шаблон расстановки, включающий в себя множество различных шаблонов, определяющих информацию положения на коврике 30. Информация положения на коврике 30 может рассматриваться как информация положения, ассоциированная с реальным пространством. Например, на коврике 30 определено множество единичных областей в шаблоне сетки, и для каждой единичной области печатают (записывают) шаблон, ассоциированный с информацией положения единичной области. Следует отметить, что, как раскрыто в шестом варианте осуществления, описанном ниже, носитель информации может иметь форму книги. Более конкретно, необходимо только, чтобы носитель информации в соответствии с настоящим изобретением имел поверхность, включающую в себя заданный шаблон расстановки и следует отметить, что поверхность, включающая в себя заданный шаблон расстановки, не ограничена плоскостью. Дополнительно, заданный шаблон расстановки может быть одним из шаблона, который отражает видимый свет, и шаблон, который отражает невидимый свет, или может быть их комбинацией. В случае использования шаблона, который отражает невидимый свет, шаблон, который отражает световое излучение в инфракрасном диапазоне, может быть напечатан на коврике 30, и, например, для распознавания шаблона может быть использован инфракрасный (IR) датчик для коврика 30.
Кроме того, заданный шаблон расстановки может включать в себя второй шаблон расстановки, определяющий информацию управления, касающуюся перемещения тележек 20. Например, информация управления включает в себя информацию управления, по меньшей мере, одной из скоростей перемещения, схемы перемещения и вращательного движения тележки 20.
1-3. Тележка 20
1-3-1. Внешняя конфигурация
Тележка 20 представляет собой пример перемещения тела согласно настоящему изобретению. Тележка 20 выполняет операцию (такую как перемещение), включающую в себя перемещение, основываясь на операции пользователя на операционном блоке 122 или на основании управления устройством 10 для обработки информации. На фиг. 2-5 показаны схемы, иллюстрирующие пример внешней конфигурации тележки 20. На фиг. 2 показан пример вида снизу тележки 20. На фиг. 3 показан пример вида спереди тележки 20. На фиг. 4 показан пример вида сверху тележки 20. На фиг. 5 показан пример вида сбоку тележки 20. Следует отметить, что «перемещение», описанное в настоящем изобретении, может рассматриваться как перемещение движущегося тела (например, тележки 20), главным образом, в горизонтальном направлении.
Как показано на фиг. 2, тележка 20 включает в себя выключатель 250 питания, датчик 228a положения, переключатель 222a и два колеса 254. Для каждого колеса 254 тележка 20 может дополнительно включать в себя один двигатель (не показан), который вращает колесо 254. Например, три компонента, включающие в себя переключатель 222а и два колеса 254, находятся в контакте с поверхностью, и в этом состоянии тележка 20 движется по поверхности, где расположена тележка 20.
1-3-1-1. Блок 228 датчиков
Блок 228 датчиков включает в себя датчик 228a положения. Датчик 228a положения может включать в себя датчик изображения (камеру). Например, в случае, когда тележка 20 размещена на коврике 30, датчик 228a положения захватывает изображение коврика 30 и применяет процесс, такой как декодирование, к захваченному изображению. Таким образом, датчик 228a положения считывает шаблон расстановки, записанный на коврике 30, для получения информации положения на коврике 30. Более конкретно, датчик 228a положения считывает шаблон расстановки, записанный в единичной области, расположенной непосредственно под датчиком 228a положения среди множества единичных областей на коврике 30.
Как показано на фиг. 2, датчик 228a положения может быть прикреплен отдельно, по существу, от центра тележки 20 в горизонтальном направлении тележки 20. Кроме того, датчик 228a положения может быть прикреплен к передней части тележки 20 в горизонтальном направлении тележки 20.
Хотя не показано, блок 228 датчиков может дополнительно включать в себя датчик ускорения, датчик скорости вращения двигателя и датчик силы. Например, датчик силы может воспринимать величину внешней силы, приложенной к тележке 20. Например, датчик силы может быть установлен вместо переключателя 222a.
1-3-1-2. Блок 260 крепления
Как показано на фиг. 3-5, блок 260 крепления может быть установлен на верхней поверхности тележки 20. Блок 260 крепления включает в себя заданный электрический интерфейс. Например, блок 260 крепления включает в себя интерфейс с широтно-импульсной модуляцией (PWM), шину между интегральными схемами (I2C), последовательный периферийный интерфейс (SPI), порты ввода/вывода общего назначения (GPIO) и т.п.
Как показано на фиг. 6, игрушка 40 может быть прикреплена к блоку 260 крепления. Игрушка 40 включает в себя комбинацию из одного или нескольких блоков (конструкторский набор). Игрушка 40 может дополнительно включать в себя, например, светодиод, двигатель, зуммер и тому подобное.
В случае, когда игрушка 40 прикреплена к блоку 260 крепления, тележка 20 может управлять перемещением игрушки 40 (например, излучением света LED, работой двигателя, выводом звука и т.п.). Хотя подробности будут описаны позже, когда, например, пользователь подносит игрушку 40 или тележку 20, снабженную игрушкой 40, близко или вступает в контакт с листом бумаги (таким как карточка) или тому подобным, записывая заданный шаблон расстановки (также называемый четвертым шаблоном расстановки), игрушка 40 или тележка 20 могут быть ассоциированы с четвертым шаблоном расстановки. В этом случае, устройство 10 для обработки информации или тележка 20 могут использовать шаблон перемещения, соответствующий четвертому шаблону расстановки, для управления перемещением игрушки 40.
1-3-2. Функциональная конфигурация
Со ссылкой на фиг. 7 приведено описание функциональной конфигурации тележки 20. Фиг. 7 представляет собой блок-схему, иллюстрирующую пример функциональной конфигурации тележки 20. Как показано на фиг. 7, тележка 20 включает в себя блок 200 управления, блок 220 связи, блок 222 ввода, блок 224 отображения, блок 226 вывода звука, блок 228 датчика, блок 230 беспроводной связи ближнего радиуса действия, блок 232 привода, и серводвигатель 234. Отметим, что повторное изложение приведенного выше описания опущено.
1-3-2-1. Блок 200 управления
Блок 200 управления может включать в себя, например, схему обработки, такую как центральный процессор (CPU). Блок 200 управления осуществляет полное управление перемещением тележки 20.
Например, блок 200 управления вызывает блок 220 связи передавать в устройство 10 для обработки информации информацию положения, считанную блоком 228 датчиков с коврика 30. Обратите внимание, что вместо блока 228 датчиков блок 200 управления может указывать информацию положения, соответствующую шаблону расстановки, считываемую блоком 228 датчиков с коврика 30.
1-3-2-2. Блок 222 ввода
Блок 222 ввода принимает пользовательскую операцию для тележки 20. Блок 222 ввода может включать в себя переключатель 222a, кнопку и т.п.
1-3-2-3. Блок 224 отображения
Блок 224 отображения включает в себя, например, LED (такой как четырехцветный LED), LCD, OLED или тому подобное. Блок 224 отображения отображает различные типы информации в соответствии с управлением блока 200 управления. Например, во время активации игрового приложения блок 224 отображения отображает различные типы информации уведомления и т.п., относящиеся к тележке 20.
1-3-2-4. Блок 226 вывода звука
Блок 226 вывода звука включает в себя, например, динамик и тому подобное. Блок 226 вывода звука выводит различные звуки в соответствии с управлением блока 200 управления. Например, во время активации игрового приложения блок 226 вывода звука выводит различные звуки уведомлений (например, зуммер), звуковые эффекты и т.п. относящиеся к тележке 20.
1-3-2-5. Блок 230 беспроводной связи ближнего радиуса действия
Блок 230 беспроводной связи ближнего радиуса действия включает в себя, например, устройство считывания и записи ближней радиосвязи (NFC). Например, блок 230 беспроводной связи ближнего радиуса считывает информацию из NFC метки, расположенной близко к блоку 230 беспроводной связи ближнего радиуса действия или записывает информацию на NFC метку.
1-3-2-6. Блок 232 привода
Блок 232 привода представляет собой механизм для привода тележки 20. Блок 232 привода может включать в себя, например, левый двигатель и правый двигатель. Двигатели могут обеспечивать перемещение в соответствии с управлением блока 200 управления. Таким образом, отдельные колеса 254 тележки 20 вращаются, и тележка 20 может перемещаться по поверхности, на которой расположена тележка 20.
1-3-2-7. Серводвигатель 234
Сервомотор 234 представляет собой двигатель сервомеханизма, установленного в тележке 20, для управления положением, скоростью и т.п. Например, серводвигатель 234 вращается в соответствии с управлением блока 200 управления. В результате, тележка 20 сталкивается (например, ударяется) с другим объектом, или тележка 20 падает.
Выше было приведено описание конфигурации системы для обработки информации, общей для вариантов осуществления настоящего изобретения. Далее будет последовательно изложено подробное описание вариантов осуществления.
2. Первый вариант осуществления
Прежде всего будет приведено описание первого варианта осуществления в соответствии с настоящим изобретением. Во-первых, будут приведены предпосылки разработки первого варианта осуществления. Обычно желательно, чтобы типы ковриков 30 (например, иллюстрации коврика 30) варьировались в соответствии с типами игр и приложений. В этом случае, устройство 10 для обработки информации должно иметь возможность указывать тип коврика 30, который использует пользователь.
Как описано ниже, в соответствии с первым вариантом осуществления, одна или несколько тележек 20 могут быть размещены на коврике 30, и устройство 10 для обработки информации может указывать тип коврика.
2-1. Конфигурация
Далее будет подробно описана конфигурация в соответствии с первым вариантом осуществления. Фиг.8 является блок-схемой, иллюстрирующей пример конфигурации устройства 10 для обработки информации в соответствии с первым вариантом осуществления. Как показано на фиг. 8, устройство 10 для обработки информации включает в себя блок 100 управления, блок 120 связи, операционный блок 122, блок 124 отображения, блок 126 вывода звука, блок 128 подключения кассеты и блок 130 хранения.
2-1-1. Блок 100 управления
Блок 100 управления может включать в себя, например, схему обработки, такую как CPU 150, описанный ниже. Блок 100 управления полностью управляет перемещением по устройству 10 обработки информации. Дополнительно, как показано на фиг. 8, блок 100 управления включает в себя блок 102 получения информации, блок 104 спецификации информации о коврике, блок 106 управления перемещением и блок 108 управления выводом.
2-1-2. Блок 102 получения информации
Блок 102 получения информации получает информацию, воспринятую тележкой 20, от тележки 20. Например, блок 102 получения информации получает от тележки 20 информацию положения или информацию управления, считанную тележкой 20 с коврика 30, для получения информации.
Блок 102 получения информации может дополнительно получать из операционного блока 122 информацию пользователя, введенную в операционный блок 122. Блок 102 получения информации может дополнительно получать из блока 128 подключения кассеты информацию (например, двоичные данные, музыкальные данные и т.п. приложения), считанные с кассеты, подключенной к блоку 128 подключения кассеты.
2-1-3. Блок 104 спецификации информации о коврике
Блок 104 спецификации информации о коврике определяет идентификационную информацию (идентификатор коврика) о коврике 30, предоставленную тележкой 20, на основании информации, полученной блоком 102 получения информации.
2-1-3-1. Пример спецификации 1
Например, в коврике 30 может быть определена начальная позиция, и информация положения начальной позиции и ID коврика может быть ассоциирована друг с другом заранее. В этом случае, когда, например, тележку 20 помещают в начальное положение и нажимают кнопку запуска, установленную в операционном блоке 122, блок 104 спецификации информации о коврике может указывать, в качестве идентификатора коврика 30, ID коврика, ассоциированный с информацией положения, полученной тележкой 20 из начального положения. Например, как показано на фиг. 9, блок 104 спецификации информации о коврике указывает, что идентификатор «Mat23» коврика, ассоциированный с информацией положения (5, 2), полученной тележкой 20a из начального положения на коврике 30, является ID коврика 30, поставленного тележкой 20а.
2-1-3-2. Пример спецификации 2
В качестве альтернативы, в коврике 30 может быть определены начальный позиции двух тележек 20, и комбинация информации положения двух начальных позиций и идентификаторов коврика может быть ассоциирована друг с другом заранее. В этом случае, когда одну тележку 20 помещают в каждое из двух начальных положений и нажимают кнопку запуска, находящуюся в операционном блоке 122, блок 104 спецификации информации о коврике может указывать в качестве идентификатора мата 30 коврика, ID коврика, ассоциированный с комбинацией информации положения, полученной двумя тележками 20 от коврика 30. В примере, показанном на фиг. 10, информация положения, полученная тележкой 20a из первого начального положения на коврике 30, представляет собой (5, 2), и информация положения, полученная тележкой 20b из второго начального положения на коврике 30, представляет собой (10, 5). В этом случае, блок 104 спецификации информации о коврике может указывать, что идентификатор «Mat23» коврика, ассоциированный с комбинацией (5, 2) и (10, 5), является ID коврика 30, поставленного двумя тележками 20.
2-1-3-3. Пример спецификации 3
Альтернативно, комбинация информации положения и угловая информации двух тележек 20 и ID коврика в начале приложения (такого как игра) может быть заранее ассоциирована друг с другом. В этом случае, когда одна тележку 20 помещают в каждом из двух начальных положений на коврике 30 под каждым заранее установленным углом, и, например, нажимают кнопка запуска, установленную в операционном блоке 122, блок 104 спецификации информации о коврике может в качестве ID коврика 30 указывать ID коврика, ассоциированный с комбинацией информации положения и угловой информации, полученной двумя тележками 20 от коврика 30. В примере, показанном на фиг. 11, информация положения, полученная тележкой 20a из первого начального положения на коврике 30, равна (5, 2), и величина угла тележки 20a относительно коврика 30 составляет «45 градусов». Информация положения, полученная тележкой 20b из второго начального положения на коврике 30 составляет (10, 5) и величина угла тележки 20b относительно коврика 30 составляет «0 градусов». В этом случае, блок 104 спецификации информации о коврике определяет, что ID «Mat23» коврика, ассоциированный с комбинацией информации, является ID коврика 30 для двух тележек 20. Согласно примеру спецификации 3, могут повысить надежность определения ID коврика.
2-1-3-4. Пример спецификации 4
Альтернативно, начальная позиция или начальная область, записывающая ID коврика (вместо информации положения), может быть напечатана на коврике 30. В качестве альтернативы, листовой носитель (такой как бумага и наклейка), включающий в себя печатную информацию (строку символов или изображение) с указанием начальной области и записью ID коврика, может быть приклеена на коврик 30.
В этих случаях, как показано, например, на фиг. 12, блок 104 указания информации о коврике может указывать в качестве ID коврика 30 идентификатор коврика, считываемый тележкой 20 из начальной области 42 в момент размещения тележки 20 в начальной области 42 (что является начальной областью, напечатанной на коврике 30 или листообразном носителе, наклеенным на коврике 30 и указывающим начальную область). Как показано на фиг. 12 и 13, начальная область 42 может быть расположена на коврике 30 или, как показано на фиг. 14, начальная область 42 может быть расположена вне коврика 30.
2-1-3-5. Пример спецификации 5
Альтернативно, идентификатор коврика может быть записан в заранее определенной единичной области (например, (0, 0) или тому подобное) в коврике 30. В этом случае, например, в случае, когда идентификатор коврика еще не указан, тележка 20 может сначала автоматически перемещаться в заданную единичную область 300, как показано на фиг. 15 или 16. Блок 104 спецификации информации о коврике может затем указывать, что идентификатор коврика, считываемый тележкой 20 из заданной единичной области 300, является идентификатором коврика 30, снабженный тележкой 20.
2-1-3-6. Пример спецификации 6
Альтернативно, в отдельных единичных областях в коврике 30 могут быть записаны значения координат, закодированные с использованием положений единичных областей и заранее определенной функции. Кроме того, комбинация кодированных значений координат, ассоциированных с множеством последовательных единичных областей и идентификатором коврика, может быть ассоциирована друг с другом. В этом случае, когда, например, тележку 20 помещают в начальное положение, заранее определенной на коврике 30, тележка 20 может сначала автоматически перемещаться во множестве последовательных единичных областей. Блок 104 спецификации информации о коврике может затем указать, что идентификатор коврика, ассоциированный с комбинацией кодированных значений координат, считанных тележкой 20 из множества последовательных единичных областей, является идентификатором коврика 30, снабженным тележкой 20.
Следует отметить, что направление конкретно не ограничено относительно множества последовательных единичных областей. Например, как указано стрелкой A на фиг. 17, тележка 20 может быть выполнена с возможностью перемещения в горизонтальном направлении или может быть выполнена с возможностью перемещения в вертикальном направлении. Альтернативно, тележка 20 может быть выполнена с возможностью перемещения по диагонали, как показано стрелкой B на фиг. 17.
2-1-4. Блок 106 управления перемещением
Блок 106 управления перемещением управляет перемещением тележки 20 на основании информации (информация положения, угловая информация, результат измерения ускорения и т.п.) относительно тележки 20, полученной блоком 102 получения информации и на основании указанного идентификатора коврика блоком 104 спецификации информации о коврике. Например, блок 106 управления перемещением управляет перемещением, отображением и/или выводом звука тележки 20 на основании полученной информации относительно тележки 20 и указанного идентификатора коврика.
Блок 106 управления перемещением также управляет перемещением тележки 20 на основании операционной информации пользователя, введенной в операционный блок 122. Например, в случае, когда операционная информация указывает направление перемещения, блок 106 управления перемещением вызывает тележку 20 перемещаться в направлении перемещения.
2-1-5. Блок 108 управления выводом
Блок 108 управления выводом управляет выводом различных типов информации на основании информации, полученной блоком 102 получения информации, и идентификатора коврика, указанного блоком 104 спецификации информации о коврике. Например, блок 108 управления выводом вызывает блок 124 отображения отображать информацию отображения приложения (например, экран меню, информация состояния приложения, информации уведомления и т.п.), полученной блоком 102 получения информации. Блок 102 управления выводом также вызывает блок 126 вывода звука выводить аудиоданные приложения (например, фоновая музыка (BGM), звук предупреждения, звуковой эффект и т.п.) приложения, полученные блоком 102 получения информации.
2-1-6. Блок 120 связи
Блок 120 связи может включать в себя, например, устройство 166 связи, описанное ниже. Блок 120 связи передает и принимает информацию к другим устройствам (например, к тележкам 20) и от них. Например, блок 120 связи передает и принимает информацию к отдельным тележкам 20 и от них посредством беспроводной связи (например, Bluetooth (зарегистрированный товарный знак) с низким энергопотреблением (BLE) или Wi-Fi (зарегистрированный товарный знак)). Например, блок 120 связи передает информацию управления перемещением на тележки 20 в соответствии с управлением блока 106 управления перемещением. Блок 120 связи также принимает информацию (такую как информация положения и ускорение), воспринятую тележкой 20, из тележки 20.
2-1-7. Блок 126 вывода звука
Блок 126 вывода звука может включать в себя, например, устройство 162 вывода, описанное ниже. Блок 126 вывода звука выводит звук в соответствии с управлением блока 108 управления выводом.
2-1-8. Блок130 хранения
Блок 130 хранения может включать в себя, например, запоминающее устройство 164, описанное ниже. Запоминающее устройство 130 хранит различные типы данных и различные типы программного обеспечения.
2-1-9. Модификация
Следует отметить, что конфигурация устройства 10 для обработки информации в соответствии с первым вариантом осуществления не ограничена примером, описанным выше. Например, один или более блок 124 отображения, блок 126 вывода звука и блок 128 подключения кассеты могут отсутствовать в устройстве 10 для обработки информации. Например, блок 124 отображения может быть, например, смартфоном, планшетным терминалом, телевизионным приемником или тому подобное, и в этом случае, блок 124 отображения и устройство 10 для обработки информации могут иметь возможность осуществлять связь через проводную связь или беспроводную связь.
Дополнительно, хотя операционный блок 122 подключен к устройству 10 для обработки информации через кабель в примере, показанном на фиг. 1, пример этим не ограничен. Операционный блок 122 и устройство 10 для обработки информации могут быть разделены и могут иметь возможность осуществлять связь посредством беспроводной связи (например, BLE, Wi-Fi (зарегистрированный товарный знак) или тому подобное).
2-2. Последовательность выполнения операций процесса
Выше было приведено описание конфигурации в соответствии с первым вариантом осуществления. Далее, со ссылкой на фиг. 18, будет описана последовательность операций процесса в соответствии с первым вариантом осуществления. Фиг. 18 представляет собой схему последовательности операций, иллюстрирующую пример последовательности операций процесса в соответствии с первым вариантом осуществления.
Как показано на фиг. 18, пользователь сначала подключает кассету к блоку 128 подключения кассеты устройства 10 для обработки информации. Затем блок 128 подключения кассеты считывает данные игрового приложения, сохраненные в кассете. Затем блок 100 управления активирует игровое приложение на основании считанных данных (S101).
Затем пользователь использует операционный блок 122 для перемещения тележки 20, размещенной на коврике 30. Затем блок 102 получения информации устройства 10 для обработки информации принимает и получает операционную информацию, принятую операционным блоком 122, от операционного блока 122 (S103).
Затем блок 106 управления перемещением генерирует информацию управления для управления перемещением тележки 20 на основании полученной операционной информации. Блок 120 связи затем передает информацию управления в тележку 20 в соответствии с управлением блока 106 управления перемещением (S105).
Затем тележку 20 перемещают на коврике 30 в соответствии с принятой информацией управления (S107). Кроме того, каждый раз, когда тележка 20 перемещается в другую единичную область, тележка 20 считывает информацию положения, записанную в единичной области (S109). Затем тележка 20 передает считанную информацию положения и идентификационную информацию тележки 20 в устройство 10 для обработки информации (S111).
Впоследствии, блок 104 спецификации информации о коврике устройства 10 для обработки информации определяет идентификатор коврика для коврика 30, снабженного тележкой 20, на основании принятой информации положения (S113).
Затем, блок 106 управления перемещением генерирует информацию управления перемещением для управления перемещением тележки 20 на основании информации положения, принятой на S111, и идентификатор коврика, указанного на S113 (S115). Затем блок 120 связи передает информацию управления перемещением в тележку 20 в соответствии с управлением блока 106 управления перемещением (S117).
Затем тележка 20 функционирует в соответствии с принятой информацией управления перемещением (S119).
2-3. Полезные эффекты
Как описано выше, устройство 10 для обработки информации в соответствии с первым вариантом осуществления может указывать ID коврика 30 на основании информации (такой как информация положения), считываемой тележкой 20, размещенной на коврике 30 с коврика 30. Следовательно, даже в случае использования различных типов ковриков 30 для различных типов игровых приложений, устройство 10 для обработки информации может точно указать тип коврика 30, который использует пользователь. Дополнительно, соответствующий процесс может быть выполнен в соответствии с типом коврика 30.
3. Второй вариант осуществления
Выше было приведено описание первого варианта осуществления. Далее будет описан второй вариант осуществления. Сначала будут описаны предпосылки для второго варианта осуществления. Как описано выше, информация положения в основном записывается в каждой из отдельных единичных областей в коврике 30.
Случайно во время игры, как показано на фиг. 19, тележка 20 может быть перемещена за пределы коврика 30. В таком случае, тележка 20 не может получить информацию положения и устройство 10 для обработки информации не может распознать информацию положения тележки 20. В результате, продолжение игры может быть затруднено.
Как описано позже, согласно второму варианту осуществления, тележка 20 может быть надлежащим образом возвращена на коврик 30 в случае, когда тележка 20 была перемещена за пределы коврика 30.
3-1. Конфигурация
Далее будет описана конфигурация согласно второму варианту осуществления. Фиг. 20 является функциональной блок-схемой, иллюстрирующей пример конфигурации устройства 10 для обработки информации согласно второму варианту осуществления. Как показано на фиг. 20, по сравнению с первым вариантом осуществления (показанным на фиг. 8), устройство 10 для обработки информации согласно второму варианту осуществления дополнительно включает в себя блок 110 обнаружения внешней силы. В дальнейшем будут описаны только составляющие элементы с функциями, отличными от первого варианта осуществления.
3-1-1. Блок 110 обнаружения внешней силы
Блок 110 обнаружения внешней силы обнаруживает, применяют ли внешнюю силу к тележке 20, и определяет величину внешней силы на основании информации, полученной блоком 102 получения информации. Например, блок 110 обнаружения внешней силы обнаруживает применяют или нет внешнюю силу и определяет величину внешней силы на основании статистических данных значения, измеренного датчиком скорости вращения двигателя (блок 228 датчиков) в тележке 20. В качестве альтернативы, блок 110 обнаружения внешней силы обнаруживает, наличие или отсутствие внешней силы, и определяет величину внешней силы, сравнивая значение, измеренное датчиком ускорения (блок 228 датчиков) в тележке 20, и результат оценки скорости перемещения тележки 20 (то есть скорость перемещения тележки 20 оценена на основании разницы между временем получения информации положения в последний раз и временем вновь полученной информации положения).
3-1-2. Блок 106 управления перемещением
Блок 106 управления перемещением согласно второму варианту осуществления управляет тележкой 20 таким образом, что тележку 20 автоматически перемещают в заранее определенное положение в случае, когда имеется отклонение в получении информации положения с помощью блока 102 получения информации. В качестве альтернативы, блок 106 управления перемещением управляет направлением перемещения тележки 20 на основании направления перемещения тележки 20 непосредственно перед генерированием величины отклонения при получении информации положения с помощью блока 102 получения информации. В настоящем документе приведены конкретные примеры случая наличия отклонения в получении информации положения, включающий в себя случай, когда информация положения не может быть получена (например, случай, когда тележка 20 перемещается за пределы коврика 30), случай, когда взаимосвязь между частями полученной информации положения до и после несовместимы, и случай, когда информация положения не может быть правильно обнаружена из-за неисправность блока 228 датчиков тележки 20. Например, в случае, когда блок 106 управления перемещением определяет, что тележка 20 перемещена за пределы коврика 30, блок 106 управления перемещением управляет тележкой 20 так, что тележка 20 перемещается к коврику 30.
3-1-2-1. Пример управления 1
Например, в случае, когда блок 106 управления перемещением определяет, что тележка 20 перемещена за пределы коврика 30, блок 106 управления перемещением может вызвать тележку 20 перемещаться назад, пока тележка 20 не сможет снова получить информацию положения, как указано стрелкой А на фиг. 21.
3-1-2-2. Пример управления 2
В качестве альтернативы, в случае, когда блок 106 управления перемещением определяет, что тележка 20 перемещается за пределы коврика 30, блок 106 управления перемещением может вызвать тележку 20 двигаться вперед по дуге на заданном радиусе, пока тележка 20 не сможет получить информацию положения снова, как указано стрелкой A на фиг. 22. Альтернативно, блок 106 управления перемещением может вызвать тележку 20 двигаться вперед по спирали (например, с постепенно увеличивающимся радиусом), пока тележка 20 не сможет снова получить информацию положения, как указано стрелкой A на фиг. 23. В соответствии с примером управления 2, в случае, когда, например, тележка 20, с установленной на ней игрушкой 40 (например, специальным объектом), которая не может перемещаться вперед, расположена вне коврика 30, тележка 20 может быть перемещена к коврику 30, в то же время предоставляя пользователю реальное восприятие события.
3-1-2-3. Пример управления 3
Альтернативно, в случае, когда блок 106 управления перемещением определяет, что тележка 20 перемещена за пределы коврика 30, блок 106 управления перемещением может сначала указать текущее позиционное соотношение между тележкой 20 и ковриком 30 на основании результата обнаружения тележки 20, полученного блоком 102 получения информации, и затем вызывает тележку 20 перемещаться в соответствии с заданным позиционным соотношением, пока тележка 20 не сможет снова получить информацию положения, как указано, например, стрелкой A на фиг. 24.
Далее будет описан конкретный пример способа задания позиционного соотношения между тележкой 20 и ковриком 30. Например, блок 106 управления перемещением может задавать текущее позиционное соотношение между тележкой 20 и ковриком 30 на основании предыстории значения, которое определяют датчиком скорости вращения двигателя (блок 228 датчиков) в тележке 20 и которое получают блоком 102 получения информации. Например, блок 106 управления перемещением может задавать текущее позиционное соотношение между тележкой 20 и ковриком 30 на основании информации положения, последней полученной тележкой 20, и на основании статистических данных результата измерения числа оборотов двигателя в тележке 20 с момента получения информации положения тележкой 20.
В качестве альтернативы, модуль 106 управления перемещением может дополнительно определять текущее позиционное соотношение между тележкой 20 и ковриком 30 на основании результата обнаружения внешней силы, обнаруженной боком 110 обнаружения внешней силы. Например, блок 106 управления перемещением может указывать текущее позиционное соотношение между тележкой 20 и ковриком 30 на основании информации положения, последней полученной тележкой 20, и на основании величины внешней силы (например, величины изменения ускорения), обнаруженной блоком 110 обнаружения внешней силы.
3-2. Полезный эффект
Как описано выше, устройство 10 для обработки информации в соответствии со вторым вариантом осуществления может надлежащим образом возвращать тележку 20 к коврику 30 в случае, когда определено, что тележка 20 была перемещена за пределы коврика 30. Следовательно, даже если, например, во время игры тележка 20 перемещается за пределы коврика 30, игра может быть продолжена.
4. Третий вариант осуществления
Выше было приведено описание второго варианта осуществления. Далее будет описан третий вариант осуществления. Сначала будет описаны предпосылки для реализации третьего варианта осуществления. Как описано выше, устройство 10 для обработки информации и отдельные тележки 20 в основном осуществляют связь посредством беспроводной связи. Следовательно, если соединение между устройством 10 для обработки информации и тележкой 20 временно прерывается, устройство 10 для обработки информации не может управлять тележкой 20. Дополнительно, пользователь обычно не может распознать отключение устройства 10 для обработки информации и тележки. 20, и пользователь может быть введен в заблуждение.
Как описано позже, в соответствии с третьим вариантом осуществления, пользователь может получить уведомление о сбое связи между устройством 10 для обработки информации и тележкой 20.
4-1. Тележка 20
4-1-1. Пример движения 1
В соответствии с третьим вариантом осуществления тележка 20 может автоматически перемещаться в заранее определенную область 310 на коврике 30, как показано на фиг. 25 в случае сбоя связи с устройством 10 для обработки информации. В данном документе заранее определенная область 310 может быть напечатана на коврике 30. Как показано на фиг. 25, на коврике 30 могут быть обозначены не только область 310a при наличии сбоя связи, но также, например, область 310b для указания низкого уровня заряда батареи в тележке 20, область 310c для указания окончания игры, область 310d для указания других неисправностей и т.п.. Кроме того, для каждой области 310 изображение и сообщение, указывающее тип области 310, могут быть напечатаны на коврике 30 вместе с областью 310 или могут отображаться на блоке 124 отображения, как показано на фиг. 25. Это позволяет пользователю распознать, что в данный момент возникла неисправность или тому подобное, и распознать тип неисправности.
4-1-2. Пример перемещения 2
В качестве альтернативы, шаблон перемещения тележки 20 и значение, обозначенное шаблоном перемещения, могут быть ассоциированы заранее. Например, когда устройство 10 для обработки информации и тележка 20 отсоединены, тележка 20 может автоматически перемещаться по шаблону перемещения, ассоциированного с «разъединением». Альтернативно, в случае, когда тележка 20 ожидает инструкции или тому подобного от устройства 10 для обработки информации тележка 20 может автоматически перемещаться с колебательным движением (как часы), как показано на фиг. 26. В качестве альтернативы, в случае низкого уровня заряда батареи тележки 20, тележка 20 может автоматически перевернуться.
4-2. Полезный эффект
Как описано выше, согласно третьему варианту осуществления, сообщение о сбое связи может быть сообщено пользователю в случае, когда устройство 10 для обработки информации и тележка 20 отключены.
5. Четвертый вариант осуществления
Выше был описан третий вариант осуществления. Далее будет приведено описание четвертого варианта осуществления. Сначала будут описаны предпосылки для четвертого варианта осуществления.
В основном, размер одного коврика 30 определен заранее. Следовательно, если множество ковриков 30 может быть соединено, как показано, например, на фиг. 27, пользователь, при желании, может без труда увеличивать размер коврика 30.
Однако одна и та же информация положения в основном записана в одних и тех же единичных областях в разных ковриках 30. Следовательно, когда тележка 20 пересекает коврики 30, если информацию положения, записанную в коврике 30 после перемещения, используют в качестве информации положения тележки 20, то положение тележки 20 распознают некорректно. Например, когда тележку 20 перемещают от края коврика 30a (верхний край, показанный на фиг. 28) к краю коврика 30b, как обозначено точкой P2 на фиг. 28, тележка 20 считывает с коврика 30b ту же информацию положения, что и информацию положения, записанную на другом краю коврика 30a (нижний край, показанный на фиг. 28).
Как описано позже, согласно четвертому варианту осуществления, положение тележки 20 может быть точно определено даже в случае соединения множества ковриков 30, и тележка 20 пересекает коврики 30.
5-1. Соединение ковриков 30
В четвертом варианте осуществления, в случае, когда пользователь соединяет множество ковриков 30, может быть выполнена первоначальная установка для установки множества ковриков 30 в качестве группы. Например, при первоначальной установке тележка 20 может непрерывно перемещаться по всему множеству ковриков 30 один раз для каждого, например, на основании управления устройством 10 для обработки информации или на основании действий пользователя. В результате, устройство 10 для обработки информации может распознавать множество ковриков 30 как группу.
Следует отметить, что, как показано на фиг. 29, желательно, чтобы отдельные углы 32 отдельных ковриков 30 имели отверстия, которые могут быть соединены с использованием блоков (конструкторский набор). Это позволяет пользователю легко соединять и отделять множество ковриков 30, как показано на схеме справа на фиг. 29.
5-2. Конфигурация
Далее будет описана конфигурация в соответствии с четвертым вариантом осуществления. Составные элементы, включенные в состав устройства 10 для обработки информации согласно четвертому варианту осуществления, могут быть такими же, как во втором варианте осуществления (проиллюстрированном на фиг. 20). Далее будут описаны только составляющие элементы с функциями, отличными от второго варианта осуществления.
5-2-1. Блок 100 управления
5-2-1-1. Определение перехода от коврика к коврикам 30
Пример определения 1
Блок 100 управления согласно четвертому варианту осуществления может определять, переместилась ли тележка 20 к другому коврику 30, на основании разницы между информацией положения, полученной в последний раз, и вновь полученной информацией положения и на основании результата обнаружения блоком 110 обнаружения внешней силы. Например, в случае, когда абсолютное значение разности между информацией положения, полученной в прошлый раз, и вновь полученной информацией положения, касающейся тележки 20, больше, чем заданное пороговое значение, и блок 110 обнаружения внешней силы определяет, что внешнее усилие не прикладывается к тележке 20, блок 100 управления определяет, что тележка 20 переместилась на другой коврик 30. В примере, показанном на фиг. 28, блок 100 управления определяет, что тележка 20 переместилась с коврика 30a на коврик 30b, когда тележка 20 достигает точки P2.
Следует отметить, что, когда блок 100 управления определяет, что тележка 20 переместилась на другой коврик 30, устройство 10 для обработки информации также может указывать взаимное расположение между двумя ковриками 30 (например, угол между ковриками 30) на основании полученной информации положения в последний раз, вновь полученной информации положения и направлением движения тележки 20.
Пример определения 2
Альтернативно, блок 100 управления также может определять, переместилась ли тележка 20 к другому коврику 30, на основании результата распознавания изображения, полученного датчиком 228a положения (блоком 228 датчиков) тележки 20. Например, в случае обнаружения области (зазора) без коврика 30 непосредственно под датчиком 228a положения на основании изображения, полученного датчиком 228a положения, и определяют, что ширина зазора находится в пределах заданного диапазона, блок 100 управления может определять, что тележка 20 переместилась на другой коврик 30. Следует отметить, что наличие или отсутствие коврика 30 непосредственно под датчиком 228a положения может быть определено, например, на основании величины изменения фокусного расстояния. датчика 228а положения (камеры).
5-2-1-2. Определение соединения с другим ковриком 30
Следует отметить, что, как описано выше, датчик 228а положения может быть расположен на краю тележки 20. Поэтому, когда тележка 20 достигает края коврика 30а, по которому движется тележка 20, блок 100 управления также может указывать, соединен или нет коврик 30а с другим ковриком 30b на основании результата распознавания для изображения, полученного датчиком 228а положения. Например, как показано на фиг. 30, модуль 100 управления указывает, что коврик 30a соединен с другим ковриком 30b в случае, когда распознают, что непосредственно под датчиком 228a положения находится другой коврик 30b, на основании результата распознавания для изображения, полученного датчиком 228a положения, в то время, когда центр тележки 20 достигает края коврика 30а. Дополнительно, как показано на фиг. 31, блок 100 управления указывает, что коврик 30a не соединен с другим ковриком 30b в случае, когда распознают, что другой коврик 30b отсутствует непосредственно под датчиком 228a положения на основании результата распознавания для изображения, полученного датчиком 228a положения в момент, когда центр тележки 20 достигает края коврика 30a. Пример спецификации может предотвратить падение тележки 20 с коврика 30а.
5-3. Полезный эффект
Как описано выше, согласно четвертому варианту осуществления перемещение тележки 20 к другому коврику 30 может быть точно определено при перемещении тележки 20 между множеством ковриков 30 при соединении множества ковриков 30.
6. Пятый вариант осуществления
Выше был описан четвертый вариант осуществления. Далее будет приведено описание пятого варианта осуществления. Прежде всего будут описаны предпосылки для пятого варианта осуществления.
Если пользователь может добавлять объекты игры (например, препятствия, зоны, предметы, трассы гоночной игры и т.п.) к существующему коврику 30, то данный аспект повышает степень свободы игры, что является желательным. Например, как показано на фиг. 32, желательно, чтобы пользователь мог добавить полигоны 50, соответствующие отдельным объектам, к существующему коврику 30.
Как описано позже, в соответствии с пятым вариантом осуществления пользователь может свободно и легко добавлять объекты игры (например, препятствия, зоны, предметы, трассы гоночной игры и тому подобное) к существующему коврику 30.
6-1. Установка полигона
6-1-1. Пример 1 установки
Во-первых, будет описан пример установки полигона, соответствующего объекту согласно пятому варианту осуществления. Например, как показано на фиг. 33, тележка 20 может быть перемещена на коврик 30, чтобы добавить полигон 50, соответствующий объекту игры. Например, каждый раз, когда пользователь нажимает на переключатель 222a тележки 20, одна вершина полигона 50 может быть добавлена в то же положение, что и положение тележки 20, или около нее во время нажатия. В качестве альтернативы, в случае, когда пользователь перемещает тележку 20 на коврике 30, одновременно нажимая переключатель 222а тележки 20, то же положение или около траектории движения тележки 20 может быть задано как контур полигона 50. Отметим, что информация о заданном положении полигона 50 может храниться в блоке 130 хранения.
6-1-2. Пример 2 установки
В качестве альтернативы, как показано на фиг. 34, множество тележек 20 может быть расположено на коврике 30, например, в заданном режиме установки. В этом случае, та же самая позиция, что и рядом с положением каждой из множества тележек 20, может быть установлена в качестве информации положения каждой вершины полигона 50.
В качестве альтернативы, на основе результатов определения углов множества тележек 20, расположенных на коврике 30 относительно коврика 30, может быть сформирована кривая Безье, и затем положение и форма полигона 50 могут быть определены на основании кривой Безье. Например, угол каждой тележки 20 относительно коврика 30 может быть определен как направление каждого отрезка линии полигона 50.
6-1-3. Пример 3 установки
Альтернативно, в частности, в случае гоночной игры или тому подобного, пользователь может иметь возможность динамически изменять курс, установленный для коврика 30. Например, как показано на схеме слева на фиг. 35, тележка 20 сначала автоматически зацикливает уже установленный курс в заданном режиме установки. Затем пользователь поднимает тележку 20 с коврика 30, когда тележка 20 достигает положения в курсе (точка A в примере, показанном на фиг. 35), где пользователь желает вмести изменения. Затем, как показано на схеме справа на фиг. 35, после того как тележка 20 помещена в желаемое положение (точка B в примере, показанном на фиг. 35) на коврике 30, направление движения может быть изменено так, чтобы курс включал в себя точку B (вместо пункт А).
Обратите внимание, что направление движения также может быть изменено в аналогичной процедуре в случае, когда курс определяют кривой Безье. Например, когда тележка 20 зацикливает уже установленный курс, пользователь может изменить курс, перемещая тележку 20 на коврике 30, одновременно нажимая переключатель 222а тележки 20.
Дополнительно, как показано на фиг. 36, пользователь может быть в состоянии динамически добавить новую вершину (или точку) в заданный курс. Например, как показано на схеме слева на фиг. 36, тележка 20 сначала автоматически зацикливает уже установленный курс в заданном режиме установки. Затем, когда пользователь нажимает переключатель 222a тележки 20, когда тележка 20 достигает положения (точка A в примере, показанном на фиг. 36), где пользователь желает добавить вершину, в положение может быть добавлена новая вершина по курсу.
6-1-4. Пример 4 установки
6-1-4-1. Бумага или наклейка
В качестве альтернативы пользователь может расположить на коврике 30 листовой носитель информации для записи специальной информации, отличной от информации положения, чтобы, тем самым, добавить полигон 50. В настоящем документе листовой носитель информации является примером второго листового носителя информации согласно к настоящему изобретению. Специальная информация может быть шаблоном расстановки (вторым шаблоном расстановки) типа, отличного от шаблона расстановки, напечатанного на коврике 30 и ассоциированного с информацией положения. Например, второй шаблон расстановки может быть ассоциирован с типом объекта. Альтернативно, второй шаблон расстановки может определять информацию управления, касающуюся перемещения тележки 20. Например, информация управления включает в себя информацию управления, по меньшей мере, одной из скорости движения, шаблона перемещения и вращательного движения тележки 20. Дополнительно, область второго шаблона расстановки в основном меньше области первого шаблона, соответствующего коврику 30.
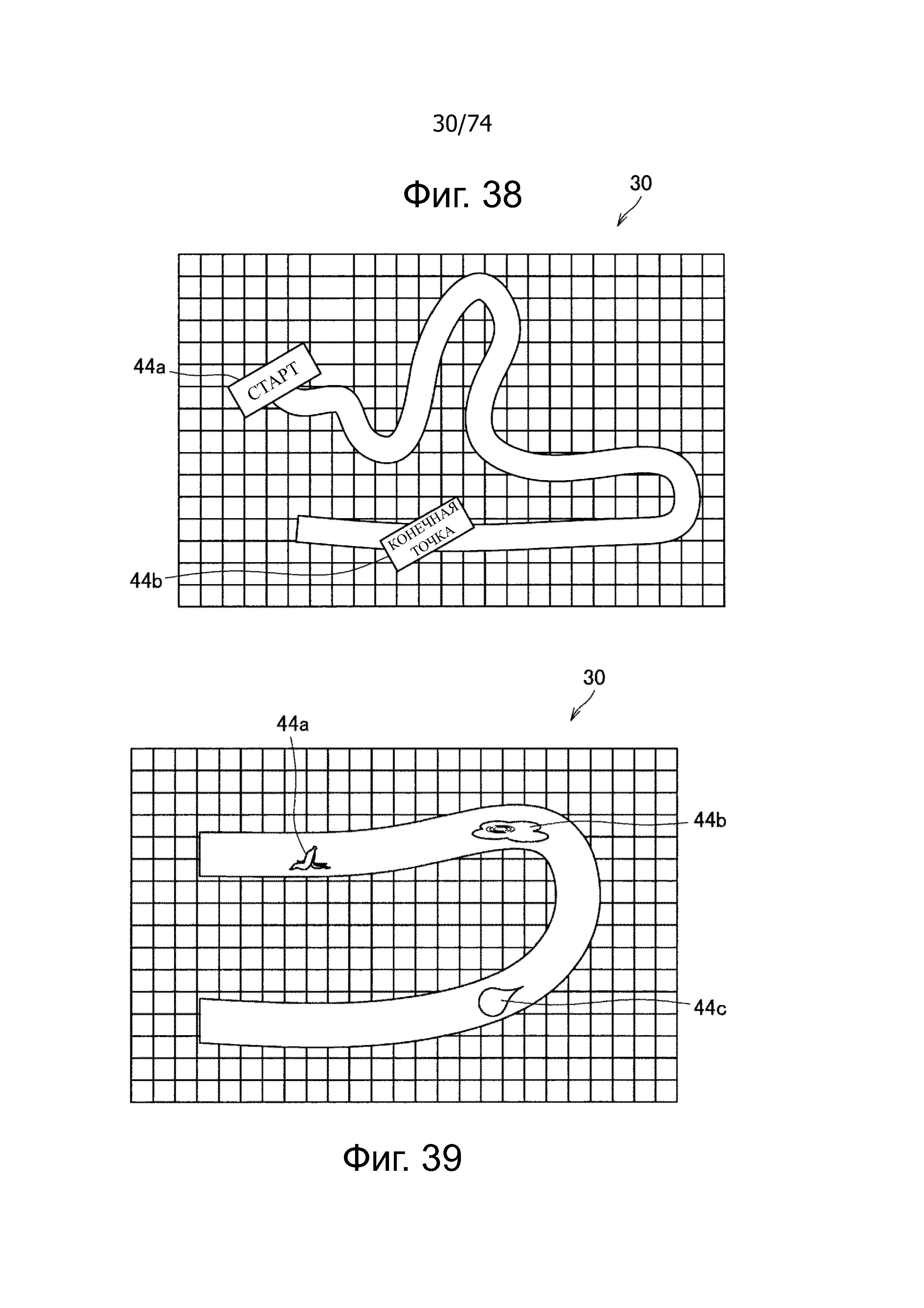
Листообразный носитель информации представляет собой, например, бумагу, наклейку или тому подобное. Например, как показано на фиг. 37, пользователь использует ножницы или режущий инструмент, чтобы разрезать бумагу (или наклейку) 44a на желаемые формы, а затем размещает отрезанную бумагу 44b и бумагу 44c в желательных положениях коврика 30. В результате, каждая из областей размещения бумаги 44b и область размещения бумаги 44с в коврике 30 становится областью записи специальной информации. Например, когда тележка 20 достигает области размещения бумаги 44b или области размещения бумаги 44с, тележка 20 может считывать информацию, записанную в бумаге 44b или бумаге 44с (вместо информации положения).
Например, в случае гоночной игры бумагу 44a, записывающая информацию, соответствующую начальной точке, и бумагу 44b, записывающая информацию, соответствующую цели, располагают на коврике 30, как показано на фиг. 38, и пользователь может указать начальную точку и финиш в гоночной игре.
В качестве альтернативы, как показано на фиг. 39, кусочки бумаги 44, записывающие информацию, указывающую различные предметы (такие как банан, лед, масло, лужа и тому подобное), могут быть расположены на трассе гоночной игры. В этом случае, в случае, когда тележка 20 достигает кусков бумаги 44, блок 106 управления перемещением может управлять перемещением тележки 20 для вращения. В качестве альтернативы, по ходу движения могут быть дополнительно размещены кусочки бумаги, записывающие информацию о специальных предметах для увеличения или уменьшения скорости тележки 20.
В качестве альтернативы, в случае ролевой игры (RPG) на коврике 30 информация может быть размещена на бумаге, указывающая сундук с сокровищами, информация о записи на бумаге, указывающая ловушку и т.п.
6-1-4-2. Прозрачная наклейка
Кроме того, например, в качестве прозрачной наклейки 44 можно использовать инфракрасный фильтр, записывающей специальную информацию. Как показано на фиг. 37, прозрачная наклейка 44 может быть размещена на коврике 30 для добавления специальной информации на коврике 30 без уменьшения видимости фонового изображения (то есть, изображения, напечатанного на коврике 30).
6-1-4-3. Расчет информации положения
Следует отметить, что, как показано на фиг. 40, когда тележка 20 движется на листовом носителе 44, на котором записывают специальную информацию, тележка 20 временно не может получить информацию положения (поскольку коврик 30 покрыт листовым носителем 44). Следовательно, устройство 10 для обработки информации не может распознавать информацию положения тележки 20.
Таким образом, когда информацию положения не принимают от тележки 20, блок 102 получения информации может фактически указывать текущую информацию положения тележки 20 на основании информации положения, последней полученной от тележки 20, и результата измерения другого типа, полученного от тележки 20. Например, блок 102 получения информации может виртуально задавать текущую информацию положения тележки 20 на основании информации положении, последней полученной от тележки 20, и истории результатов измерения количества оборотов двигателя в тележке 20 с момента получения информации положения тележкой 20.
6-2. Полезный эффект
Как описано выше, в соответствии с пятым вариантом осуществления пользователь может свободно и легко добавлять объекты игры (например, препятствия, зоны, предметы, трассы гоночной игры и тому подобное) к существующему коврику 30.
7. Шестой вариант осуществления
Ранее был описан пятый вариант осуществления. Далее будет описан шестой вариант осуществления. Как описано позже, согласно шестому варианту осуществления могут использовать множество ковриков 30 для реализации ролевой игры (RPG).
7-1. Конфигурация книги
В шестом варианте осуществления каждая страница снабжена ковриком 30 для формирования книги 70, как показано на фиг. 41. Например, как показано на фиг. 41, объяснение может быть написано на каждой странице слева, на странице книги 70, и страница игры может быть написана на каждой странице справа. Например, переход к «странице 22» может быть задан при невыполнении заданного события, и может быть задан переход к «странице 50» при завершении игры. Таким образом, например, может быть сформирована книга 70 под названием «Выбери свое собственное приключение». Пользователь может переворачивать страницы и повторять перемещение тележки 20 на перевернутых страницах, чтобы наслаждаться RPG.
Кроме того, как показано на фиг. 41, на краях части или всех страниц (коврика 30) могут быть сформированы отверстия 700. В результате, когда тележка 20, перемещающаяся по странице, опускается в отверстие 700 на странице, пользователь может легко перевернуть страницу на страницу назначения.
Кроме того, как показано на фиг. 42, желательно обеспечить наклон вокруг отверстия 700. В результате, когда страница переворачивается, тележка 20 может легко перемещаться (выходить) из отверстия 700 в перевернутой странице.
8. Седьмой вариант осуществления
Шестой вариант осуществления был описан. Далее будет описан седьмой вариант осуществления. Прежде всего будут описаны предпосылки для седьмого варианта осуществления. Некоторые пользователи могут обманывать или мешать оппонентам в играх. Например, как показано на фиг. 43, некоторые пользователи могут касаться или перемещать свои тележки 20 или тележки 20 противников без разрешения. Следовательно, желательно иметь возможность надлежащим образом определять обман.
Как описано позже, согласно шестому варианту осуществления, может быть определен факт наличия или отсутствия обмана.
8-1. Конфигурация
Далее будет описана конфигурация согласно седьмому варианту осуществления. Составляющие элементы, включенные в состав устройства 10 для обработки информации согласно седьмому варианту осуществления, могут быть такими же, как и во втором варианте осуществления (проиллюстрированном на фиг. 20). Далее будут описаны только составляющие элементы с функциями, отличными от второго варианта осуществления.
8-1-1. Блок 110 обнаружения внешней силы
В случае, когда блок 110 обнаружения внешней силы согласно седьмому варианту осуществления обнаруживает приложение внешней силы к тележке 20, блок 110 обнаружения внешней силы может дополнительно определять, генерируется ли внешняя сила рукой человека или другим объектом (например, объект размещен на коврике 30). Например, блок 110 обнаружения внешней силы определяет, что внешняя сила генерируется рукой человека, в случае, когда блок 110 обнаружения внешней силы определяет, что направление движения тележки 20 определено из значения, измеренного датчиком ускорения (блок 228 датчиков) в тележке 20, и направления движения, заданное из значения, измеренного датчиком вращения двигателя (блок 228 датчиков) в тележке 20, противоположно. Конкретный пример случая включает в себя случай, в котором хотя двигатель в тележке 20 пытается двигаться назад, тележка 20 фактически перемещается назад рукой человека.
8-2. Полезный эффект
Как описано выше, согласно седьмому варианту осуществления, может быть соответствующим образом определен факт обмана во время игры с тележкой 20.
9. Восьмой вариант осуществления
Был описан седьмой вариант осуществления. Далее будет описан восьмой вариант осуществления. Сначала будет описаны предпосылки для восьмого варианта осуществления. Также желательно, чтобы пользователь мог выбирать желаемую игру из множества типов игр. Также желательно, чтобы пользователь мог интуитивно выбирать желаемую игру.
Как описано ниже, согласно восьмому варианту осуществления пользователь может интуитивно выбирать желаемую игру из множества типов игр.
9-1. Конфигурация
В восьмом варианте осуществления могут использовать лист бумаги 72 с напечатанным «меню выбора игры», как показано на фиг. 44. Меню выбора игры может включать в себя множество областей 720 выбора игры и множество областей 722 выбора для других функций. Информация (такая как шаблон расстановки), соответствующая области, может быть записана в каждой из областей 720 выбора игры и областей 722 выбора для других функций, и тележка 20 может быть способна считывать информацию.
Например, в случае, когда пользователь помещает тележку 20, расположенную за пределами бумаги 72, в область 720c выбора игры 3, как показано на фиг. 44, тележка 20 может считывать информацию, записанную в области 720c, и устройство 10 для обработки информации может принимать информацию от тележки 20, чтобы указывать, что выбрана «игра 3». Устройство 10 для обработки информации может затем начать «игру 3».
Альтернативно, тележка 20 может автоматически перемещаться по бумаге 72 на основании заранее определенного алгоритма (например, случайного выбора игры). В этом случае, устройство 10 для обработки информации может принимать информацию, считываемую тележкой 20, с бумаги 72 в положении, в котором тележка 20 остановлена, и устройство 10 для обработки информации может указывать, что выбрана игра, соответствующая информации.
Кроме того, как показано на фиг. 44, области 722 выбора для других функций включают в себя, например, область 722a переключателя включения/выключения питания, область 722b обновления приложения, область 722c начала зарядки, область 722d регулировки громкости и тому подобное. Например, в случае, когда тележка 20 размещена в области 722a переключателя включения/выключения питания, устройство 10 для обработки информации может включать/выключать питание тележки 20 (и/или устройства 10 для обработки информации). Альтернативно, в случае, когда тележка 20 размещена в области 722b обновления приложения, устройство 10 для обработки информации может начать обновлять, например, заранее определенное приложение, сохраненное в устройстве 10 для обработки информации (например, через сеть связи, такую как интернет). Альтернативно, в случае, когда тележка 20 размещена в области 722c начала зарядки, устройство 10 для обработки информации может перемещать тележку 20 к заранее определенной зарядной станции. Обратите внимание, что «меню выбора игры» может быть напечатано на специальном коврике 30 вместо бумаги 72.
9-2. Полезный эффект
Как описано выше, согласно восьмому варианту осуществления пользователь может интуитивно и легко выбирать желаемую игру среди множества типов игр.
10. Девятый вариант осуществления
Выше было приведено описание восьмого варианта осуществления. Далее будет описан девятый вариант осуществления. Сначала будут описаны предпосылки для девятого варианта осуществления. Как описано со ссылкой на фиг. 2 и т.п., датчик 228a положения (тележки 20) может быть прикреплен отдельно от центра тележки 20 в горизонтальном направлении, например, по механической или электрической причине. Следовательно, информация положения, считываемая тележкой 20 с коврика 30, и информация положения, соответствующая центру тележки 20, могут значительно отличаться. Например, в примере, показанном на фиг. 45, информация 320 положения, соответствующая датчику 228a положения, равна (7, 3), тогда как информация 322 положения, соответствующая центру тележки 20, равна (5, 5). Следовательно, информация положения тележки 20, распознаваемая устройством 10 для обработки информации, и информация положения тележки 20, распознаваемая пользователем, могут значительно различаться, и, например, пользователь может запутаться или почувствовать неудобство во время игры.
Как описано позже, в соответствии с девятым вариантом осуществления информация положения, соответствующая основному центру тележки 20, может быть указана на основе информации местоположения, воспринятой тележкой 20.
10-1. Конфигурация
Далее будет описана конфигурация в соответствии с девятым вариантом осуществления. Фиг. 46 является блок-схемой, иллюстрирующей пример конфигурации устройства 10 для обработки информации в соответствии с девятым вариантом осуществления. Как показано на фиг. 46, по сравнению со вторым вариантом осуществления (проиллюстрированным на фиг. 20), устройство 10 для обработки информации в соответствии с девятым вариантом осуществления дополнительно включает в себя блок 112 коррекции информации положения. В дальнейшем будут описаны только составные элементы с функциями, отличными от второго варианта осуществления.
10-1-1. Блок 112 коррекции информации положения
Блок 112 коррекции информации положения корректирует информацию положения, полученную от тележки 20, на основании положения присоединения датчика 228a положения на тележке 20. Например, блок 112 коррекции информации положения корректирует информацию положения, полученную с тележки 20, в информацию положения, которую указывают из позиции присоединения датчика 228a положения и которая соответствует основному центру тележки 20. Например, как показано на фиг. 47, расстояния в направлении x и направлении y между позицией присоединения датчика 228a положения и центральной точкой тележки 20 могут быть заранее определены, например, в конструкции тележки 20. В этом случай, как показано на фиг. 48, блок 112 коррекции информации положения сначала использует расстояние в направлении x между положением присоединения датчика 228a положения и центральной точкой тележки 20, чтобы скорректировать координату x, полученную из тележки 20, и затем использует расстояние в направлении y между положением присоединения датчика 228a положения и центральной точкой тележки 20 для корректировки координаты y, полученной от тележки 20. В результате получают информацию положения, соответствующую, по существу, центру тележки 20.
10-1-2. Блок 106 управления перемещением
Блок 106 управления перемещением согласно девятому варианту осуществления управляет перемещением тележки 20 на основании информации положения тележки 20, скорректированной блоком 112 коррекции информации положения.
10-2. Полезный эффект
Как описано выше, устройство 10 для обработки информации в соответствии с девятым вариантом осуществления корректирует информацию положения, полученную из тележки 20, в информацию положения, соответствующую, по существу, центру тележки 20. Следовательно, информацию положения тележки 20 распознают устройством 10 для обработки информации и информация положения тележки 20, распознаваемая пользователем, становятся практически одинаковыми, и пользователь может продолжать играть в игру.
11. Десятый вариант осуществления
Был описан девятый вариант осуществления. Далее будет описан десятый вариант осуществления. Сначала будут описаны предпосылки для десятого варианта осуществления. Например, когда количество операционных блоков 122 и тележек 20, используемых в одной и той же ситуации, велико, пользователь может быть не в состоянии распознать соответствие между отдельными операционными блоками 122 и отдельными тележками 20. Дополнительно, пользователь может быть в не состоянии распознать тележку 20, которой должен управлять пользователь, среди множества тележек 20. В результате пользователь может принять другую тележку 20b за тележку, которой должен управлять пользователь, и управлять тележкой 20b (например, пользователь может произвольно поместить игрушку 40 на другую тележку 20b).
Как описано позже, в соответствии с десятым вариантом осуществления пользователь может легко ассоциировать отдельные операционные блоки 122 и отдельные тележки 20.
11-1. Сопряжение
В десятом варианте, как показано на фиг. 49, специальная информация (например, шаблоны расстановки) может быть напечатана на отдельных функциональных блоках 122, или листовые носители (такие как бумага и наклейки), записывающие специальную информацию, могут быть размещены на отдельные операционные блоки 122. В этом случае, когда пользователь подносит тележку 20 близко или входит в контакт с областью 44, включающей в себя напечатанную специальную информацию (или область, включающую в себя вставленный листовой носитель информации, на котором записана специальная информация), тележка 20 может считывать специальную информацию и затем передавать считывать информацию в устройство 10 для обработки информации. Затем устройство 10 обработки информации может соединять операционный блок 122 и тележку 20 на основе принятой информации.
11-2. Блок 108 управления выходом
Для каждого комплекта сопряжения тележки 20 и операционного блока 122 блок 108 управления выводом согласно одиннадцатому варианту осуществления может вызвать блок 224 отображения (такого как LED) тележки 20 и блок отображения (такой как LED и LCD) на операционном блоке 122 излучать свет того же цвета или того же шаблона мигания.
11-3. Полезные эффекты
Как описано выше, в соответствии с десятым вариантом осуществления пользователь может легко сопрягать отдельные операционные блоки 122 и отдельные тележки 20. Кроме того, пользователь может получить информацию относительно соответствия между отдельными операционными блоками 122 и отдельными тележками 20.
12. Одиннадцатый вариант осуществления
Ранее было приведено описание десятого варианта осуществления. Далее будет описан одиннадцатый вариант осуществления. Прежде всего, будут описаны предпосылки для одиннадцатого варианта осуществления. Также желательно иметь возможность использовать множество тележек 20, расположенных на коврике 30, для проведения футбольной игры.
Кстати, в известных роботизированных футбольных играх мяч часто распознается на основании распознавания изображений, снятых камерами. Однако камеры и система распознавания изображений могут увеличить стоимость изделия.
Кроме того, во многих случаях один пользователь может управлять только одним роботом-игроком. Следовательно, может быть способ, при котором компьютер автоматически управляет перемещением других роботов-игроков. В этом случае, желательно, чтобы другие роботы-игроки могли соответствующим образом управляться во время игры.
Как описано позже, в соответствии с одиннадцатым вариантом осуществления множество тележек 20, расположенных на коврике 30, может использоваться для недорогой реализации футбольной игры.
12-1. Игровая платформа
Сначала будет описана игровая платформа согласно одиннадцатому варианту осуществления со ссылкой на фиг. 50. Как показано на фиг. 50, на коврике 30 могут быть расположены, по меньшей мере, две тележки 20 для игроков и тележка 24 для мяча. Тележки 20 для игроков могут быть обычными тележками 20 (описанными выше). Как описано позже, тележка 24 для мяча может быть тележкой особой формы.
Как показано на фиг. 50, игрушка 40 в форме игрока может быть расположена на тележке 20 игрока. Игрушка 40с в форме мяча может быть расположена на тележке 24 для мяча. Например, пользователь перемещает тележку 20 игрока, чтобы вызвать игрушку 40 на тележке 20 игрока столкнуться с игрушкой 40с на тележке 24 для мяча. Таким образом, как описано ниже, тележка 24 для мяча может физически перемещаться или может перемещаться посредством управления устройством 10 для обработки информации в соответствии с столкновением. Дополнительно, как показано на фиг. 50, на коврике 30 может быть напечатана иллюстрация футбольного поля.
12-1-1. Тележка 24 для мяча
Фиг. 51 иллюстрирует пример вида снизу тележки 24 для мяча. Как и в тележке 24а для мяча, так и в тележке 24b для мяча, показанной на фиг. 51, на нижней поверхности тележки 24 для мяча может быть установлено множество всевозможных колес 256. Таким образом, тележка 24 для мяча может плавно перемещаться в произвольном направлении.
В качестве альтернативы, как в тележке 24с для мяча, показанной на фиг. 51, на нижней поверхности тележки 24 для мяча может быть установлен вентилятор 258, и тележка 24 для мяча может иметь возможность зависать посредством вращения вентилятора 258. Например, когда тележка 24 для мяча находится в плавающем состоянии, устройство 10 для обработки информации принудительно останавливает вращение вентилятора 258 тележки 24 для мяча. В результате, тележка 24 для мяча опускается и может быть реализовано ограничивающее перемещение мяча.
В качестве альтернативы, как в тележке 24d для мяча, показанной на фиг. 51, колеса и тому подобное не могут быть установлены на нижней поверхности тележки 24 для мяча, и может быть нанесена заранее определенная краска для уменьшения коэффициента трения нижней поверхности. В результате, когда тележка 20 игрока сталкивается с тележкой 24 для мяча, тележка 24 для мяча может скользить по коврику 30.
12-2. Конфигурация
Далее будет описана конфигурация согласно одиннадцатому варианту осуществления. Составные элементы, включенные в состав устройства 10 для обработки информации в соответствии с одиннадцатым вариантом осуществления, могут быть такими же, как в девятом варианте осуществления (проиллюстрировано на фиг. 46). Далее будут описаны только составляющие элементы с функциями, отличными от девятого варианта осуществления.
12-2-1. Блок 106 управления перемещением
12-2-1-1. Управление тележкой 20 игрока
Например, для каждой тележки 20 игрока, ассоциированной с операционным блоком 122, блок 106 управления перемещением согласно одиннадцатому варианту осуществления вызывает тележку 20 игрока перемещаться в зависимости от операции пользователя на операционном блоке 122, ассоциированном с тележкой 20 игрока. Блок 106 управления перемещением дополнительно управляет перемещением отдельных тележек 20 игрока, не ассоциированных с операционными блоками 122, на основании информации положения, полученной из тележки 24 для мяча и на основании, например, заранее определенного алгоритма, результатов машинного обучения, или т.п.
В примере, показанном на фиг. 52 предполагают, что пользователь не управляет тележкой 20b игрока, и роль вратаря установлена для тележки 20b игрока. В этом случае, блок 106 управления перемещением может следовать движению тележки 20а игрока, эквивалентному атакующему игроку противника, чтобы перемещать тележку 20b игрока только в одном направлении (направление х в примере, показанном на фиг. 52). То есть, блок 106 управления перемещением может последовательно перемещать тележку 20b игрока так, что координата x тележки 20b игрока всегда приблизительно равна координате x тележки 20a игрока.
12-2-1-2. Управление тележкой 24 для мяча
Блок 106 управления перемещением может дополнительно управлять перемещением тележки 24 для мяча в соответствии с результатом обнаружения столкновения тележки 20 игрока с тележкой 24 для мяча. Например, блок 106 управления перемещением вызывает тележку 24 для мяча перемещаться на расстояние, направление движения и скоростью в соответствии с результатом измерения положения столкновения, направления положения, ускорения при столкновении и т.п. тележки 20 игрока относительно тележки 24 для мяча. Это может перемещать тележку 24 для мяча, как будто тележка 24 для мяча на самом деле получила удар.
В качестве альтернативы, устройство 10 для обработки информации может не управлять перемещением тележки 24 для мяча (как описано выше). В этом случае, когда тележка 20 игрока сталкивается с тележкой 24 для мяча, при этом, тележка 24 для мяча физически перемещается на коврике 30 в соответствии со столкновением.
12-2-2. Блок 100 управления
Блок 100 управления, согласно одиннадцатому варианту осуществления, может определять наличие «нарушения правил игры», на основании результатов обнаружения столкновений множества тележек 20 для игроков во время игры в футбол. Например, как показано на фиг. 53, предполагают, что блок 100 управления обнаружил движение тележки 20b игрока, управляемой пользователем (в дальнейшем именуемой «игрок 2») (или тележкой 20b игрока, управляемой устройством 10 для обработки информации) в направление (стрелка C, показанная на фиг. 53) отличается от направления (стрелка B, показанного на фиг. 53), заданного игроком 2 (или устройством 10 для обработки информации). Например, блок 100 управления сравнивает направление движения, указанное операционной информацией игрока 2 для тележки 20b игрока (или информацию управления устройства 10 для обработки информации), и направление движения, указанное результатом измерения датчика ускорения в тележке 20b игрока, чтобы, тем самым, обнаруживать движение тележки 20b игрока в направлении, отличном от направления, указанного игроком 2 (или устройством 10 для обработки информации).
В этом случае, блок 100 управления может определить, что пользователь («игрок 1»), управляющий тележкой 20а игрока, вступивший в контакт с тележкой 20b игрока, нарушил правила игры. Например, блок 100 управления может определить, что пользователь, управляющий тележкой 20а игрока нарушил правила игры только в том случае наличия различия между командой, соответствующей тележке 20а игрока (вступающая в контакт с тележкой 20b игрока), и командой, соответствующей тележке 20b игрока.
12-3. Полезные эффекты
Как описано выше, в соответствии с одиннадцатым вариантом осуществления множество тележек 20, расположенных на коврике 30, можно использовать для недорогой реализации футбольной игры. Дополнительно, одна или несколько тележек 20 для игроков, которыми не управляет пользователь, могут автоматически и соответствующим образом перемещаться во время игры в футбол.
13. Двенадцатый вариант осуществления
Выше было приведено описание одиннадцатого варианта осуществления. Далее будет описан двенадцатый вариант осуществления. Как описано позже, в соответствии с двенадцатым вариантом осуществления, как показано на фиг. 54, может быть реализована гоночная игра на коврике 30 с использованием множества тележек 20.
13-1. Конфигурация
Сначала будет описана конфигурация в соответствии с двенадцатым вариантом осуществления. Составные элементы, включенные в состав устройства 10 для обработки информации согласно двенадцатому варианту осуществления, могут быть такими же, как в девятом варианте осуществления (проиллюстрировано на фиг. 46). Далее будут описаны только составляющие элементы с функциями, отличными от девятого варианта осуществления.
13-1-1. Блок 106 управления перемещением
13-1-1-1. Управление перемещением при прохождении через специальную область
Блок 106 управления перемещением в соответствии с двенадцатым вариантом осуществления управляет перемещением тележки 20 на основании информации управления, соответствующей шаблону расстановки, считываемой тележкой 20 с листообразного носителя информации (такого как бумага и наклейка), расположенного на коврике 30. Шаблон расстановки, ассоциированный с представленным элементом (например, «ускорение», «препятствие», «оружие» или тому подобное) тележке 20, может быть записан на листовом носителе информации.
Например, как показано на фиг. 55, когда тележка 20 проходит над наклейкой 44a, соответствующей «ускорению», блок 106 управления перемещением дает команду тележке 20 увеличить скорость тележки 20 на основании информации, считываемой тележкой 20 с наклейки 44a. Альтернативно, когда тележка 20 проходит над наклейкой 44b, соответствующей «оружию», блок 106 управления перемещением сохраняет в блоке 130 хранения тот факт, что тележка 20 получила «оружие» на основании информации, считываемой тележкой 20 с наклейки 44б.
В качестве альтернативы, когда тележка 20 проходит над наклейкой 44 (или заранее определенной областью на коврике 30), соответствующей «препятствию», блок 106 управления перемещением вызывает тележку 20 вращаться, уменьшает скорость или управляет тележкой 20 так, чтобы тележка скользила на основании информации, считываемой тележкой 20 с наклейки 44 (или заранее определенной области на коврике 30). Например, когда тележка 20 проходит над наклейкой 44с, соответствующей «маслу», как показано на фиг. 56, блок 106 управления перемещением управляет тележкой 20 для перемещения скольжения. Дополнительно, когда тележка 20 достигает «зоны вибрации» 46, определенной на коврике 30, блок 106 управления перемещением управляет перемещением тележки 20 с вибрацией (непрерывно), в течение времени нахождения тележки 20 расположена в зоне 46 вибрации.
13-1-1-2. Управление началом игры
В другом примере управления блок 106 управления перемещением может управлять гоночной игрой, так что гоночная игра не запускается до того, как, например, все тележки 20, размещенные на коврике 30, считывают информацию положения с коврика 30 (например, блок 106 управления перемещением может подавлять движение всех тележек 20). В качестве альтернативы, блок 106 управления перемещением может управлять гоночной игрой, так что гоночная игра не запускается, если все тележки 20, участвующие в гоночной игре, не расположены в заранее определенных начальных положениях на коврике 30. В качестве альтернативы, блок 106 управления перемещением может управлять гоночной игрой так, чтобы гоночная игра не начиналась до момента подачи стартового звука гоночной игры, например, из блока 126 вывода звука.
13-1-1-3. Управление атакой
В другом примере управления, в случае, когда тележка 20a имеет определенный элемент «оружия», и пользователь нажимает заранее определенную кнопку (например, «кнопку атаки» или тому подобное) на операционном блоке 122 (ассоциированном с тележкой 20а), блок 106 управления перемещением может определять успех или неудачу атаки на другую тележку 20b в соответствии с позиционным соотношением между тележкой 20b и тележкой 20а (например, направление тележки 20а относительно тележки 20b и расстояние между тележками 20) и в соответствии с типом «оружия». Дополнительно, в случае, когда блок 106 управления перемещением определяет, что атака на тележку 20b успешна (например, «оружие» поражает тележку 20b), блок 106 управления перемещением может управлять движением тележки 20b, как если бы тележка 20b подверглась нападению, как показано на фиг. 57. Например, блок 106 управления перемещением управляет вращением двигателя в тележке 20b так, что тележка 20b вращается. Следует отметить, что позиционное соотношение между тележкой 20b и тележкой 20а может быть указано на основании информации положения и угловой информации отдельных тележек 20.
13-1-2. Блок 108 управления выводом
В случае, когда тележка 20 имеет предмет (такой как «оружие»), блок 108 управления выводом согласно двенадцатому варианту осуществления может отображать информацию, указывающую тип элемента, на блоке 124 отображения. Альтернативно, блок 108 управления выводом может вызывать блок 224 отображения тележки 20 излучать свет в соответствии с типом предмета или может вызывать блок отображения (такой как светодиод) в операционном блоке 122, ассоциированном с тележкой 20, излучать свет. Например, блок 108 управления выводом может изменить цвет или шаблон света, излучаемого блоком 224 отображения тележки 20 и/или блоком отображения в операционном блоке 122, в соответствии с типом предмета, удерживаемого тележкой 20.
13-1-3. Изменение информации установки
13-1-3-1. Обозначение условий окружающей среды
Следует отметить, что пользователь может иметь возможность изменять условия окружающей среды в гоночной игре (например, погоду, климат, этап и т.п.) на основе, например, действия пользователя на сенсорном меню 54, как показано на фиг. 58. Например, пользователь может иметь возможность определять коэффициент сцепления поверхности трассы, возможность ускорения и тому подобное на сенсорном меню 54. Кроме того, пользователь может иметь возможность выбирать тип трассы (например, грязь, пыль, лед, пространство и тому подобное) на сенсорном меню 54. Кроме того, пользователь может определять погоду (например, солнечную и дождливую), силу ветра и тому подобное в гоночной игре на сенсорном меню 54.
В случае, когда условия окружающей среды обозначены на сенсорном меню 54, блок 106 управления перемещением может управлять перемещением всех тележек 20 в гоночной игре на основании назначенных условий окружающей среды (таких как погода, климат и цикл). Блок 108 управления выводом может также вызвать блок 124 отображения отображать информацию (такую как строка символов и изображение), указывающую обозначенные условия окружающей среды.
Как показано на фиг. 58, сенсорное меню 54 может быть напечатано на бумаге (такой как карточка). В этом случае, пользователь может приблизить тележку 20 к области 540, соответствующей желаемому состоянию окружающей среды, среди областей 540, соответствующих отдельным условиям окружающей среды в сенсорном меню 54, и пользователь может вызвать тележку 20 прочитать информацию, записанную в область 540 для установки условий окружающей среды. Альтернативно, экран, соответствующий сенсорному меню 54, может отображаться на блоке 124 отображения. В этом случае, условия окружающей среды могут быть установлены на основании действий пользователя на экране.
13-1-3-2. Обозначение сложности
В качестве альтернативы пользователь может указать сложность гоночной игры, используя, например, экран меню, заранее определенную карту или тому подобное. В настоящем документе обозначением, касающимся сложности, может быть, например, выбор одного из «простой», «нормальный» и «сложный» или может быть, например, выбор одного из «50 сс», «100 сс» и «150 сс»
В случае, когда устанавливают «сложность», блок 106 управления перемещением может ограничивать максимальное значение скорости вращения двигателей всех тележек 20 в гоночной игре в соответствии с обозначенной сложностью. Таким образом, сложность гоночной игры может быть изменена.
13-2. Полезный эффект
Как описано выше, согласно двенадцатому варианту осуществления может быть реализована гоночная игра с использованием множества тележек 20, расположенных на коврике 30.
14. Тринадцатый вариант осуществления
Ранее был описан двенадцатый вариант осуществления. Далее будет описан тринадцатый вариант осуществления. Сначала будут описаны предпосылки для тринадцатого варианта осуществления. Также желательно иметь возможность реализовать игру-схватку, используя множество тележек 20, расположенных на коврике 30. Игра-схватка может быть игрой, в которой победу определяют в случае, когда тележка 20 противника выталкивается из коврика 30 (или из заранее определенной области на коврике 30) или в случае, когда тележка 20 противника падает первым. В игре-схватке сложность игры может варьироваться в зависимости от форм игрушек 40, расположенных на отдельных тележках 20. Поэтому, степень свободы стратегии повышают при наличии выбора пользователем игрушки 40, расположенной на тележке 20.
Между прочим, в случае, когда человек определяет победу или поражение в игре-схватке, может возникнуть ситуация, в которой трудно определить, какая тележка 20 выиграла. Следовательно, может быть случай, когда другие пользователи считают, что результат определения является несправедливым.
Как описано позже, согласно тринадцатому варианту осуществления, победа или поражение могут быть соответствующим образом определены, когда в игре-схватке участвуют множество тележек 20, расположенных на коврике 30.
14-1. Конфигурация
Во-первых, будет описана конфигурация в соответствии с тринадцатым вариантом осуществления. Составные элементы, включенные в состав устройства 10 для обработки информации в соответствии с тринадцатым вариантом осуществления, могут быть такими же, как в девятом варианте осуществления (проиллюстрировано на фиг. 46). Далее будут описаны только составляющие элементы с функциями, отличными от девятого варианта осуществления.
14-1-1. Блок 100 управления
Блок 100 управления в соответствии с тринадцатым вариантом осуществления может определять победу или поражение множества тележек 20, играющих в игру-схватку, на основании считывания информации, полученной от множества тележек 20. Например, как показано на фиг. 59, блок 100 управления указывает, что тележка 20a упала на основании, например, результата измерения датчика ускорения (блока 228 датчика) в тележке 20a, чтобы определить, что тележка 20a проиграла (то есть, тележка 20b выиграла). В качестве альтернативы, как показано на фиг. 60, блок 100 управления указывает, что тележка 20b выталкивается за пределы коврика 30 (в то время, как тележка 20а расположена на коврике 30) на основании, например, истории информации положения, считанной тележкой 20b, чтобы определить, что тележка 20b проиграла (то есть, тележка 20a выиграла).
Следует отметить, что вместо того, чтобы пользователи просто управляли отдельными тележками 20 во время игры, отдельные тележки 20 могут непрерывно вращаться, чтобы сражаться, как показано на фиг. 61. В этом случае, условия взаимодействия с пользователем (UX) могут быть улучшены с игрушкой 40 (такой как форма), расположенной на тележке 20. Следует отметить, что желательно вращать только игрушку 40, расположенную на тележке 20 (без вращения тележки 20). Кроме того, скорость вращения может изменяться органом управления «огня» на операционном блоке 122.
14-1-2. Блок 106 управления перемещением
Блок 106 управления перемещением согласно тринадцатому варианту осуществления может управлять перемещением отдельных тележек 20 на основании информации атрибутов, ассоциированные с отдельными тележками 20, играющими в игру-схватку. Например, блок 106 управления перемещением управляет перемещением отдельных тележек 20 на основании значений выносливости, ассоциированных с отдельными тележками 20. Например, в случае, когда значение выносливости, ассоциированное с тележкой 20a, равно или меньше заданного порогового значения, и тележка 20а сталкивается с другой тележкой 20b, блок 106 управления перемещением автоматически управляет тележкой 20а так, что тележка 20а перемещается в том же направлении, что и направление движения тележки 20b (независимо от действий пользователя тележки 20а), как показано на фиг. 62. Это может фактически указывать на то, что тележке 20а не хватает выносливости.
Следует отметить, что значение выносливости, ассоциированное с тележкой 20, может быть уменьшено в соответствии, например, с продолжительностью времени вращения двигателя в тележке 20. Например, в случае, когда двигатель в тележке 20 вращается со скоростью 100% мощности, значение выносливости, ассоциированное с тележкой 20, может постепенно уменьшаться с увеличением продолжительности вращения двигателя.
14-1-3. Изменение информации атрибутов
Следует отметить, что тележка 20 может вступить в контакт с карточкой 56 атрибута или быть рядом с ней, как показано, например, на фиг. 63, чтобы изменить информацию атрибута, ассоциированную с тележкой 20. Более конкретно, когда тележка 20 считывает шаблон расстановки, записанный в карточке 56 атрибута, информация атрибута, соответствующая шаблону расстановки, может быть вновь ассоциирована с тележкой 20. Как проиллюстрировано на фиг. 63, карточка 56 атрибута может включать в себя множество областей 560 символов и множество областей 562 навыков. Когда тележка 20 приводится в контакт или находится близко к одной из множества областей 560 символов, информация атрибута, соответствующая области 560 может быть вновь ассоциирована с тележкой 20. В примере, показанном на фиг. 63, информация атрибута, соответствующая области 560a символов, указывает на высокую скорость и низкую мощность. Информация атрибута, соответствующая символьной области 560b, указывает, что мощность высокая, а выносливость низкая. Кроме того, когда тележка 20 приводится в контакт или находится близко к одной из множества областей 562 навыков, информация атрибута, указывающая, что навык (или мощность или оружие), соответствующее области 562, может использоваться, по меньшей мере, один раз, может быть вновь ассоциированной с тележкой 20. Например, информация атрибута указывает, что можно использовать магию, такую как вода, лед и пламя. Следует отметить, что экран установки, соответствующий карточке 56 атрибута, может быть отображен, например, на блоке 124 отображения (вместо использования карточки 56 атрибута). В этом случае, для каждой тележки 20 информация атрибута, ассоциированная с тележкой 20, может быть изменена на основании операции на экране установки.
14-1-3-1. Модификация
Для модификации на поверхностях 580 карты 58 атрибутов могут быть индивидуально напечатаны шаблоны 582 (специальная информация) расстановки, отличные друг от друга, как показано на фиг. 64. Альтернативно, один и тот же шаблон 582 расстановки может быть напечатан на обеих поверхностях 580 карты 580 атрибутов.
В качестве альтернативы, шаблоны 582 (специальная информация) расстановки, отличающиеся друг от друга, могут быть индивидуально записаны во множестве карточек 58 атрибутов, снабженных одной и той же печатной иллюстрацией. В этом случае, как показано на фиг. 65, пользователь может ассоциировать тележку 20 с информацией атрибута, чтобы играть в игру (такую как карточная игра), не зная видов информации атрибутах, ассоциированных с отдельными карточками 58 атрибутов. Обратите внимание, что каждый из способов установки информации атрибута может аналогичным образом применяться к двенадцатому варианту осуществления (гоночная игра).
14-2. Полезные эффекты
Как описано выше, в соответствии с тринадцатым вариантом осуществления, может быть реализована игра-схватка с использованием множества тележек 20, расположенных на коврике 30. Кроме того, победа или поражение в игре-схватке могут быть определены автоматически и соответствующим образом.
15. Четырнадцатый вариант осуществления
Ранее был описан тринадцатый вариант осуществления. Далее будет описан четырнадцатый вариант осуществления. Как описано позже, согласно четырнадцатому варианту осуществления, пользователь может устанавливать правило игры с высокой степенью свободы.
В четырнадцатом варианте осуществления пользователь может выбирать правило игры на основании, например, операции пользователя в меню 60 выбора правила, проиллюстрированного на фиг. 66. Как показано на фиг. 66, например, опрокидывание, падение с коврика 30, выход за пределы коврика 30 и тому подобное можно выбирать для условий победы или поражения в игре. Дополнительно, что касается игроков в игре, например, можно выбрать только одного пользователя, двух пользователей, комбинацию одного пользователя и одного игрока, комбинацию одного пользователя и трех игроков, комбинацию двух пользователей и двух игроков и подобное. Дополнительно, что касается коврика 30 можно выбрать, например, использование «коврика A», использование «коврика B», использование комбинации «коврика A», «коврика B» и «коврика C», без использования коврика 30 и тому подобное. Дополнительно, в отношении установки параметров функционирования, например, может быть выбран режим управления колесом, режим управления пользователем и т.п. Кроме того, в отношении настройки компьютера (например, настройки в отношении игрока), например, может быть выбран автоматический побег, автоматическая погоня, случайное перемещение и т.п.
Как показано на фиг. 66, меню 60 выбора правил может быть напечатано на бумаге (такой как карточка). В этом случае, пользователь может приблизить тележку 20 к области 600, соответствующей желаемому правилу, из областей 600, соответствующих отдельным правилам в меню 60 выбора правил, и может вызвать тележку 20 считывать информацию, записанную в области 600, для тем самым, установить правила игры. Альтернативно, экран, соответствующий меню 60 выбора правил, может отображаться на блоке 124 отображения, и правило игры может быть установлено на основании действий пользователя на экране.
Как описано выше, согласно четырнадцатому варианту осуществления, пользователь может устанавливать правило игры с высокой степенью свободы.
16. Пятнадцатый вариант осуществления
Ранее был описан четырнадцатый вариант осуществления. Далее будет описан пятнадцатый вариант осуществления. Как описано позже, согласно пятнадцатому варианту осуществления может быть реализована игра в лабиринт, включающая в себя элементы обучения, с использованием тележек 20 и коврика 30.
16-1 Обзор
Фиг. 67 является схемой, иллюстрирующей пример игры в лабиринт согласно пятнадцатому варианту осуществления. Как показано на фиг. 67, коврик 30, снабженный напечатанной иллюстрацией лабиринта и множеством типов мозаичных элементов 62 для управления перемещением тележки 20 на коврике 30, может использоваться в игре в лабиринт. Например, пользователь сначала помещает одну тележку 20b в начальное положение на коврике 30. Как показано на фиг. 67, пользователь затем размещает заранее заданную одну или более мозаичных элементов 62 в линию, чтобы сформировать последовательность 64 команд. Затем, когда пользователь помещает одну тележку 20a на край последовательности 64 команд, тележка 20a автоматически перемещается по последовательности 64 команд. и затем считывает команды (информацию управления), записанные в отдельных мозаичных элементах 62, включенных в состав последовательности 64 команд. Затем управляют перемещением тележки 20b на основании команд считывания.
На фиг. 68 показана схема, иллюстрирующая примеры мозаичных элементов 62. Как показано на фиг. 68, могут быть подготовлены, например, мозаичные элементы «вернуться назад» 62a на один квадрат, «пойти вперед» 62b на один квадрат, «повернуть влево» 62c, «повернуть вправо» 62d, «сыграть» 62e, «начало последовательности» 62f и другие типы мозаичных элементов 62.
16-2. Конфигурация
Далее будет описана конфигурация согласно пятнадцатому варианту осуществления. Составные элементы, включенные в состав устройства 10 для обработки информации согласно пятнадцатому варианту осуществления, могут быть такими же, как в девятом варианте осуществления (проиллюстрировано на фиг. 46). Далее будут описаны только составляющие элементы с функциями, отличными от девятого варианта осуществления.
16-2-1. Блок 106 управления перемещением
Блок 106 управления перемещением согласно пятнадцатому варианту осуществления вызывает другую тележку 20b перемещаться по коврику 30 в соответствии с последовательностью команд, считываемых тележкой 20а из последовательности 64 команд. Например, в случае, когда последовательность 64 команд включает в себя игровые мозаичные элементы 62e, и обнаруживают, что тележка 20a достигла игрового мозаичного элемента 62e, блок 106 управления перемещением вызывает тележку 20b перемещаться в соответствии с каждой из одной или нескольких команд в порядке одной или нескольких команд, считываемых посредством тележки 20а в последовательности команд 64 до обнаружения.
Следует отметить, что одна и та же информация положения может быть записана в каждом квадрате коврика 30. Таким образом, даже в случае, когда, например, параметр вращения двигателя в тележке 20 отличается от стандартного значения, тележка 20 можно аккуратно перемещать по квадратам на коврике 30.
16-2-2. Блок 100 управления
Блок 100 управления согласно пятнадцатому варианту осуществления может определять победу или поражение пользователя на основании предварительно установленного правила и перемещения тележки 20b на коврике 30. Например, блок 100 управления определяет, что пользователь проиграл в случай, когда тележка 20b проходит через «стенку», определенную в лабиринте, в случае, когда тележка 20b достигает отметки «огонь» до достижения отметки «вода», в случае, когда тележка 20b достигает отметки «монстр» до достижения отметки «меч», в случае, когда тележка 20b достигает отметки «сундук с сокровищами» до достижения отметки «ключ», и в других случаях. Кроме того, блок 100 управления определяет, что пользователь выиграл (то есть, игра очищена) в случае, когда тележка 20b достигает отметки «сундук с сокровищами» до того, как будет выполнено любое из условий.
16-3. Полезный эффект
Как описано выше, согласно пятнадцатому варианту осуществления, перемещение тележки 20 в игре в лабиринт управляют на основании последовательности команд, включающей в себя одну или несколько мозаичных элементов, размещенных пользователем. То есть, для начала игры в лабиринт, пользователь должен расположить множество различных типов мозаичных элементов в соответствующем порядке в соответствии с типом лабиринта. Таким образом, согласно пятнадцатому варианту осуществления может быть реализована игра в лабиринт, включающая в себя элементы обучения (такие как программирование), с использованием тележек 20 и коврика 30.
17. Шестнадцатый вариант осуществления
Ранее был описан пятнадцатый вариант осуществления. Далее будет описан шестнадцатый вариант осуществления. Прежде всего, будут описаны предпосылки для шестнадцатого варианта осуществления. Традиционно, очень мало игр, включающих в себя как элементы игры, так и элементы головоломки.
Как описано позже, согласно шестнадцатому варианту осуществления может быть реализована игра «Разрушение замка» с использованием тележек 20 и блоков (конструкторский набор). Игра в замок может включать как элементы игры, так и элементы головоломки.
В игре разрушение замка согласно шестнадцатому варианту осуществления пользователь сначала использует блоки для сборки замка 66а, как показано, например, на схеме слева на фиг. 69. Затем пользователь помещает тележку 20а на собранный замок 66а. Впоследствии пользователь использует операционный блок 122 для перемещения другой тележки 20b, снабженной игрушкой (например, оружием) 40b, чтобы, тем самым, попытаться разрушить замок 66а.
Как показано на схеме справа на фиг. 69, в случае, когда обнаружено падение тележки 20a из-за разрушения замка 66a, устройство 10 для обработки информации определяет, что игра разрушения замка окончена.
В игре «Разрушение замка» сложность игры может варьироваться в зависимости от того, как надежно собран замок. То есть, согласно шестому варианту осуществления, тележки 20 и блоки могут использоваться для реализации игры, включающей в себя как элементы игры, так и элементы головоломки.
18. Семнадцатый вариант осуществления
Выше был описан шестнадцатый вариант осуществления. Далее будет описан семнадцатый вариант осуществления. Как описано позже, согласно семнадцатому варианту осуществления, осуществляют совместное управление двумя тележками 20 (то есть, две тележки 20 перемещаются совместно). В результате, например, может быть реализовано перемещение животного.
18-1. Обзор
В семнадцатом варианте осуществления пользователь сначала приводит в контакт две тележки 20 с заранее определенной областью записи или рядом с ней, записывая специальную информацию (третий шаблон расстановки) на заранее определенном листообразном носителе (таком как книжка с картинками и карта). Третий шаблон расстановки может быть шаблоном, определяющим совместное управление двумя тележками 20. Таким образом, шаблон перемещения (шаблон совместного перемещения), соответствующий третьему шаблону расстановки, может быть ассоциирован с двумя тележками 20.
18-2. Конфигурация
Далее будет описана конфигурация согласно семнадцатому варианту осуществления. Составляющие элементы, включенные в состав устройства 10 для обработки информации в соответствии с семнадцатым вариантом осуществления, могут быть такими же, как в девятом варианте осуществления (проиллюстрировано на фиг. 46). Далее будут описаны только составляющие элементы с функциями, отличными от девятого варианта осуществления. Следует отметить, что, как описано выше, устройство 10 для обработки информации может быть предусмотрено на каждой из двух тележек 20. Кроме того, обратите внимание, что совместное управление по девятому варианту осуществления также может быть выполнено посредством связи между устройствами 10 для обработки информации, установленными на двух тележках 20. Кроме того, пример совместного управления в девятом варианте осуществления также может быть выполнен посредством связи между устройством 10 для обработки информации, включающим в себя операционный блок 122, и множеством тележек 20. Например, устройство 10 для обработки информации, включающее в себя операционный блок 122, может сначала передавать информацию (инструкцию) о перемещении только в одну из тележек 20. Затем одна тележка 20 может предоставлять принятую информацию о перемещении (или информацию о перемещении, основанную на информации перемещения) другой тележке 20. Другая тележка 20 может затем выполнить совместное перемещение в соответствии с одной тележкой 20 на основании информации о перемещении, предоставленной для одной тележки 20.
18-2-1. Блок 106 управления перемещением
Блок 106 управления перемещением согласно семнадцатому варианту осуществления может управлять позиционным соотношением между двумя тележками 20 (в дальнейшем также называемым набором тележек 26) на основании информации, полученной на основании считывания третьего шаблона расстановки двумя тележками 20. Например, блок 106 управления перемещением управляет двумя тележками 20 таким образом, что каждая из двух тележек 20 перемещаются по шаблону перемещения, соответствующему третьему шаблону расстановки.
Как описано выше, информация положения и угловая информация могут быть записаны в отдельных единичных областях на коврике 30. Например, блок 106 управления перемещением управляет двумя тележками 20 так, что каждая из двух тележек 20 перемещается на основании комбинации информации положения и угловой информации, считываемой каждой из двух тележек 20 с коврика 30, и основанной на шаблоне перемещения, ассоциированном с двумя тележками 20.
18-2-1-1. Первый пример совместного управления: медленное перемещение червя
В настоящем документе конкретные примеры совместного управления будут описаны со ссылкой на фиг. 70-77. На фиг. 70 показана схема, иллюстрирующая первый пример совместного управления набора 26 тележек. Как показано на фиг. 70, первый пример совместного управления представляет собой пример управления двумя тележками 20 (набор 26a тележек) таким образом, что две тележки 20 перемещаются по шаблону перемещения (в дальнейшем называемой первым шаблоном перемещения), например, как медлительный червь.
Например, пользователь может сначала приблизить набор 26а тележек близко к заданному листовому носителю информации, и на основании этого, первый шаблон перемещения может быть ассоциирован с набором 26а тележки. Впоследствии в режиме начальной установки, устройство 10 для обработки информации (блок 100 управления) может распознать, что, например, расстояние между двумя тележками 20 во время размещения пользователем двух тележек 20 на коврике 30 является максимальным расстоянием и может записывать максимальное расстояние в блоке 130 хранения. Блок 100 управления может дополнительно определять, какая из двух тележек 20 является тележкой 20a на стороне головы, на основании направления (угловой информации) каждой из двух тележек 20.
Впоследствии, блок 106 управления перемещением вызывает две тележки 20 повторять движение, приближаясь друг к другу и отделяясь друг от друга. Например, блок 106 управления перемещением сначала заставляет тележку 20a со стороны головы ускоряться и возвращаться назад, пока расстояние от тележки 20b со стороны хвоста не станет, например, одной трети от максимального расстояния (то есть, перемещает тележку 20a со стороны головы ближе к тележке 20b со стороны хвоста). Затем, блок 106 управления перемещением вызывает тележку 20a со стороны головы перемещаться вперед в положение, в котором расстояние от тележки 20b со стороны хвоста не превышает максимальное расстояние. Впоследствии, блок 106 управления перемещением вызывает тележку 20b на стороне хвоста ускоряться и двигаться вперед до тех пор, пока расстояние от тележки 20а на стороне головы не станет, например, одной трети максимального расстояния (то есть, перемещает тележку 20b на стороне хвоста к тележке 20а на стороне головы). Затем блок 106 управления перемещением повторяет процесс снова. В соответствии с примером совместного управления 1 комплект 26а тележки может перемещаться с помощью медлительного перемещения червя.
18-2-1-2. Второй пример совместного контроля: перемещение человека при ходьбе
На фиг. 71-73 показаны схемы, иллюстрирующие второй пример совместного управления комплектом 26 тележек. Как показано на фиг. 71, второй пример совместного управления представляет собой пример управления набором 26b тележек таким образом, что набор 26b тележек перемещается по шаблону перемещения (в дальнейшем называемым второй шаблон перемещения), такой как, например, ходьба человека (двуногая ходьба).
Например, пользователь может сначала приближает набор 26b тележки близко к заданному листовому носителю информации, и на этом основании второй шаблон движения может быть ассоциирован с набором 26b тележки. Впоследствии, в режиме начальной установки, блок 100 управления может определять тележку 20a на стороне правой ноги и тележку 20a на стороне левой ноги (из двух тележек 20) на основании, например, взаимного расположения между двумя тележки 20 (набор 26b тележек) во время размещения пользователем двух тележек 20 на коврике 30. Кроме того, блок 100 управления может автоматически определять расстояние установки между левой и правой ногами одновременно (то есть, расстояние между тележкой 20а на стороне правой ноги и тележкой 20а на стороне левой ноги) на основании расстояния между двумя тележками 20 в момент размещения двух тележек 20.
Впоследствии, блок 106 управления перемещением вызывает тележку 20a на стороне правой ноги и тележку 20a на стороне левой ноги поочередно идти вперед (или назад), чтобы двигаться к виртуальной точке 74, соответствующей целевой позиции, как показано, например, на фиг. 72 и фиг.73. Согласно примеру управления положения тележек 20 могут быть легко скорректированы, даже если положения немного отклоняются от целевых положений.
18-2-1-3. Третий пример совместного управления: структура для обхвата объекта
На фиг. 74-76 показаны схемы, иллюстрирующие третий пример совместного управления набором 26 тележек. Как показано на фиг. 74-76, третий пример совместного управления представляет собой пример управления набором 26с тележки таким образом, что набор 26с тележки перемещается, например, по шаблону перемещения (в дальнейшем именуемой третьим шаблоном перемещения) прыжка на другой объект 2, расположенный на коврике 30 для обхвата объекта 2.
Например, пользователь может сначала приблизить набор 26с тележки близко к заданному листовому носителю информации, и на этом основании третий шаблон перемещения может быть ассоциирован с набором 26с тележки. Впоследствии, в режиме начальной установки, когда пользователь помещает две тележки 20 (набор 26с тележек), например, на коврик 30 и затем нажимает, например, кнопку запуска в операционном блоке 122, блок 100 управления может автоматически распознают положение тележки 20a спереди и положение тележки 20b сзади (из двух тележек 20, как показано на фиг. 74). Таким образом, может быть подтвержден размер набора 26с тележек (например, размер бумаги, подлежащей наклеиванию на две тележки 20).
Пример управления 1
Впоследствии, когда тележка 20a впереди перемещается на основании, например, операции на операционном блоке 122, ассоциированном с тележкой 20a впереди, блок 106 управления перемещения может (автоматически) управлять перемещением тележки 20b сзади, например, что тележка 20b сзади следует за тележкой 20a впереди по плавной кривой.
Пример управления 2
Кроме того, когда заданное условие выполнено, блок 106 управления перемещением управляет двумя тележками 20 так, что две тележки 20 запрыгивают и обхватывают объект 2, расположенный рядом с тележкой 20a спереди, как показано на фиг. 75 и фиг.76. Заданное условие может заключаться в том, что пользователь выполняет заданную операцию на операционном блоке 122, или может быть, что расстояние между тележкой 20a спереди и тележкой 20b сзади становится равным или меньшим, чем заданное расстояние. Это может реализовать движение захвата объекта 2, когда расстояние между тележкой 20a спереди и тележкой 20b сзади становится равным или меньшим, чем заданное расстояние.
Отметим, что, например, набор 26с тележки также может перемещаться при обхвате объекта 2 (как показано на фиг. 76) на основании управления блоком 106 управления перемещением или действия пользователя на операционном блоке 122.
18-2-1-4. Четвертый пример совместного управления: перемещение, воспроизводящее физический феномен
Фиг. 77 является схемой, иллюстрирующей четвертый пример совместного управления набором 26 тележек. Как показано на фиг. 77, четвертый пример совместного управления представляет собой пример управления набором 26d тележек таким образом, что набор 26d тележек перемещается по форме повторяющим физическое явление (например, характер движения отталкивания и притяжение двух постоянных магнитов (в дальнейшем упоминается как как четвертый шаблон перемещения) или тому подобное.
Например, пользователь может сначала приблизить отдельные тележки 20 близко к заранее определенному листообразному носителю информации, и на основании этого «атрибуты магнита» могут быть ассоциированы с тележками 20. Более конкретно, северный полюс может быть ассоциирован с частью (такой как передняя половина) тележки 20, и южный полюс может быть ассоциирован с оставшейся частью (такой как тыльная половина) тележки 20.
Впоследствии, как показано на фиг. 77, в случае, когда множество тележек 20, ассоциированных с «атрибутами магнита», расположено на коврике 30, блок 106 управления перемещением управляет каждой тележкой 20a множества тележек 20 на основании «магнитного полюса», ассоциированного с частью тележки 20a, ближе к другой тележке 20b и основанной на расстоянии между тележкой 20a и другой тележкой 20b. Например, как показано на схеме слева на фиг. 77, когда часть, ассоциированная с «южным полюсом» в одной тележке 20a, и часть, ассоциированная с «южным полюсом» в другой тележке 20b, приближаются друг к другу, блок 106 управления перемещением управляет тележкой 20b так, что тележка 20b отталкивается (например, перемещается назад) от тележки 20а, как показано на схеме справа на фиг. 77.
Модификации
Для модификации только один магнитный полюс (то есть, «северный полюс» или «южный полюс») может быть ассоциирован с отдельными тележками 20. В этом случае, могут быть сформированы магниты только с одним магнитным полюсом (не существующим в реальном мире).
Альтернативно, коэффициенты статического трения, коэффициенты динамического трения или тому подобное могут быть установлены в качестве значений параметров. В этом случае, блок 106 управления перемещением может управлять скоростью движения и т.п. отдельных тележек 20 на основании значений параметров.
В альтернативном варианте блок 106 управления перемещением также может управлять перемещением двух тележек 20, как если бы между двумя тележками 20 была применена сила упругости. Например, блок 106 управления перемещением может управлять одной тележкой 20а, так что тележка 20а следует за другой. тележка 20б с небольшой задержкой. Это может реализовывать перемещение, как будто тележка 20а тянется тележкой 20b.
Альтернативно, блок 106 управления перемещением также может управлять скоростью вращения обоих колес тележки 20, чтобы реализовать перемещение, как если бы игрушка 40, расположенная на тележке 20, остановилась в центре вращения.
18-3. Полезный эффект
Как описано выше, согласно семнадцатому варианту осуществления, две тележки 20 могут управляться совместно. В результате, например, могут быть реализованы перемещения животных, как в первом-третьем примерах совместного управления. Следует отметить, что, как предложено выше, расстояние между двумя независимыми тележками 20 может быть ограничено равным или меньшим расстоянием в соответствии с размером реплицированного животного, и две тележки 20 могут перемещаться по-разному в одно и то же время. Можно предположить, что это увеличивает вероятность репликации животного, воспроизводимого двумя тележками 20.
18-4. Модификации
18-4-1. Модификация 1
Семнадцатый вариант осуществления не ограничен примерами. Например, в зависимости от типа шаблона перемещения (например, вида животного или тому подобного), ассоциированного с двумя тележками 20, и позиционного соотношения между двумя тележками 20 в начале, две тележки 20 могут перестать перемещаться или может сломаться при работе двух тележек 20.
Следовательно, блок 106 управления перемещением может сначала определить, нужно ли изменить позиционное соотношение между двумя тележками 20, основываясь на типе шаблона перемещения, ассоциированного с этими двумя тележками 20, и текущем позиционном соотношении между двумя тележками 20. Затем в случае, когда блок 106 управления перемещением определяет, что позиционное соотношение между двумя тележками 20 необходимо изменить, блок 106 управления перемещением может управлять перемещением двух тележек 20 для изменения позиционного соотношения между двумя тележками 20 на основании результата определения. В этом случае, как показано, например, на фиг. 78, блок 106 управления перемещением может перемещать или вращать обе (или только одну) две тележки 20 так, что позиционное соотношение между двумя тележками 20 становится позиционным отношением по умолчанию. В качестве альтернативы, в случае, когда блок 106 управления перемещением определяет, что невозможно (или трудно) автоматически изменять позиционное соотношение между двумя тележками 20 на позиционное соотношение по умолчанию, блок 108 управления выводом может вызывать блок 126 вывода звука (или тележку 20) вывести звук ошибки или может вызвать блок 124 отображения (или тележку 20) отображать ошибку, как показано на фиг. 79.
18-4-2. Модификация 2
Обычно типы и характеристики двигателей, приводов двигателей, передач и тому подобного в отдельных тележках 20 могут различаться. Следовательно, даже в случае, когда устройство 10 для обработки информации управляет каждой из множества тележек 20 таким образом, что, например, множество тележек 20 перемещают в одном направлении, часть множества тележек 20 может перемещаться в разных направлениях.
Следовательно, для каждой тележки 20 блок 106 управления перемещением может использовать угловую информацию (и информацию положения), считанную тележкой 20 с коврика 30, для управления направлением перемещения тележки 20 по мере необходимости. Например, для каждой тележки 20 блок 106 управления перемещением может управлять направлением перемещения тележки 20 (например, путем изменения направления перемещения) на основании угловой информации, полученной тележкой 20, так что направление перемещения тележки 20 становится таким же, как направление команды перемещения для тележки 20, как показано на фиг. 80.
18-4-3. Модификация 3
Как описано выше, определяют, касалась ли тележка 20 другого объекта, на основании, например, результата измерения датчика ускорения в тележке 20. С другой стороны, может быть трудно указать тип объекта прикосновения к тележке 20. В результате перемещение тележки 20 может быть ограничено, как показано на фиг. 81.
Следовательно, когда, например, определено, что длительность вращения двигателя в тележке 20 достигла заранее определенного времени, в то время как определено, что величина изменения информации положения тележки 20 находится в пределах заданного порогового значения, блок 106 управления перемещения может определить, что объект, ограничивающий перемещение тележки 20, находится по направлению перемещения тележки 20. Кроме того, в этом случае, блок 106 управления перемещением может временно прекратить управлять перемещением (например, управление перемещением вперед и управление вращением) тележки 20.
Кроме того, в случае, например, управления перемещения вперед, блок 106 управления перемещением может вызвать тележку 20 временно вернуться назад и отклониться влево и вправо. Это может реализовать перемещение, при котором тележка 20 «обнаружила препятствие и избежала препятствия». Следовательно, может быть реализовано перемещение, более похожее на перемещение животного.
19. Конфигурация аппаратного обеспечения
Выше было приведено описание вариантов осуществления. Далее, со ссылкой на фиг. 82 будет описана аппаратная конфигурация устройства 10 для обработки информации, общая для вариантов осуществления. Как показано на фиг. 82, устройство 10 для обработки информации включает в себя CPU 150, постоянное запоминающее устройство (ROM) 152, оперативное запоминающее устройство (RAM) 154, шину 156, интерфейс 158, устройство 160 ввода, устройство 162 вывода, хранилище 164 и устройство 166 связи.
CPU 150 функционирует как устройство обработки операций и устройство управления и управляет всей операцией в устройстве 10 для обработки информации в соответствии с различными программами. CPU 150 также реализует функции блока 100 управления. CPU 150 включает в себя процессор, такой как микропроцессор.
В ROM 152 хранят программы, данные управления, такие как рабочие параметры и тому подобное, используемые CPU 150.
В RAM 154 временно хранят, например, программы, выполняемые CPU 150, используемые данные и тому подобное.
Шина 156 включает в себя шину CPU или тому подобное. Шина 156 взаимно соединяет CPU 150, ROM 152 и RAM 154.
Интерфейс 158 соединяет хранилище 164 и устройство 166 связи с шиной 156.
Устройство 160 ввода включает в себя: средство ввода для пользователя для ввода информации (например, сенсорная панель, кнопка, переключатель, циферблат, рычаг, микрофон или тому подобное); схема управления вводом, которая генерирует входной сигнал на основании ввода пользователем и который выводит входной сигнал в CPU 150 и тому подобное. Устройство 160 ввода может реализовывать функции операционного блока 122.
Устройство 162 вывода включает в себя, например, устройство отображения, такое как устройство LCD, устройство OLED, проектор, лампа и тому подобное. Устройство 162 вывода также включает в себя устройство вывода звука, такое как динамик. Устройство 162 вывода может реализовывать функции блока 124 отображения и блока 126 вывода звука.
Хранилище 164 представляет собой устройство для хранения данных, которое функционирует в качестве блока 130 хранения. Хранилище 164 включает в себя, например, носитель данных, устройство записи, которое записывает данные на носитель данных, устройство считывания, которое считывает данные с носителя данных, устройство удаления, которое удаляет данные, записанные на носителе данных, и тому подобное.
Устройство 166 связи представляет собой, например, интерфейс связи, включающий в себя устройство связи (например, сетевую карту) для соединения с сетью связи, такой как интернет и локальная сеть (LAN). Устройство 166 связи также может быть устройством связи, соответствующим беспроводной локальной сети, устройством связи, соответствующим стандарту «Долгосрочное развитие» (LTE), или устройством проводной связи для проводной связи. Устройство 166 связи может реализовывать функции блока 120 связи.
20. Модификации
Хотя предпочтительные варианты осуществления настоящего раскрытия были подробно описаны со ссылкой на приложенные чертежи, настоящее изобретение не ограничивается примерами. Очевидно, что специалисты с обычными знаниями в области техники настоящего изобретения могут представлять различные изменения или модификации в пределах объема технической концепции, описанной в формуле изобретения, и подразумевается, что изменения или модификации, очевидно, относятся к технической области настоящего изобретения.
20-1. Модификация 1
Например, как показано на фиг. 83, блок 230 беспроводной связи ближнего радиуса действия (например, считывающее/записывающее NFC устройство) может быть установлен вблизи верхней поверхности в тележке 20, и метка 262 реального времени (например, программная метка) может быть установлена вблизи нижней поверхности в тележка 20. Считыватель 82 (например, считыватель NFC) может быть дополнительно установлен на коврике 30. В этом случае, когда пользователь подносит метку 80 (например, NFC метку) близко к верхней поверхности тележки 20, как показано на фиг. 83, тележка 20 может передавать информацию, считанную с метки 80, в считыватель 82. Например, блок 230 беспроводной связи ближнего радиуса действия сначала считывает информацию, сохраненную в метке 80. Затем блок 200 управления перезаписывает информацию, хранящуюся в метке 262 реального времени с информацией, считанной из метки 80. Информация, вновь сохраненная в метке 262 реального времени, затем передается в считыватель 82, расположенный непосредственно под тележкой 20. Таким образом, пользователь может передавать информацию метки 80 в область положения тележки 20 на коврике 30.
Например, когда игрушка 40 (такая как кукла), с функцией NFC, помещена на тележку 20, тележка 20 может считывать информацию, указывающую тип игрушки 40, из игрушки 40 и затем передавать считанную информацию считывателю 82 на коврике 30. Таким образом, устройство 10 для обработки информации или коврик 30 могут распознавать тип игрушки 40, помещенной в тележку 20.
20-2. Модификация 2
20-2-1. Изменение параметров
В другой модификации тележка 20 также может использоваться в качестве определенного пользовательского интерфейса. Например, как указано стрелкой A на фиг. 84 значения параметров, ассоциированных с тележкой 20 (или перемещением тележки 20), могут динамически изменяться в соответствии с расстоянием перемещения и направлением перемещения, когда пользователь переводит тележку 20. В качестве альтернативы, как показано стрелкой B, показанной на фиг. 84, значения параметров ассоциированных с тележкой 20 (или вращением тележки 20), могут динамически изменяться в соответствии с величиной вращения (такой как угол поворота и направление вращения), когда пользователь поворачивает тележку 20. Альтернативно, как обозначено стрелкой C, показанной на фиг. 84, значения параметров, ассоциированных с тележкой 20 (или состоянием переворачивания тележки 20), могут динамически изменяться в случае, когда пользователь поворачивает тележку 20 или поднимает тележку 20. Обратите внимание, что информация перемещения (перевод, вращение, опрокидывание и т.п.) может быть указано в соответствии с информацией положения или ускорением, измеренным тележкой 20.
Кроме того, в случае, когда тележка 20 включает в себя датчик силы, значения параметров, ассоциированных с тележкой 20, могут динамически изменяться в соответствии с величиной силы, измеряемой датчиком силы.
Например, информация перемещения может использоваться в качестве пользовательского интерфейса для музыкального приложения. Например, высота звука, громкость, темп, тон и тому подобное могут динамически изменяться, когда пользователь перемещает тележку 20. В качестве альтернативы значения уровня различных параметров в микшере могут динамически изменяться, как показано на фиг. 85, когда пользователь перемещает тележку 20.
20-2-2. Обозначения изменения параметров
Кроме того, когда значения параметров изменяются, тележка 20 может вызвать блок 224 отображения (тележки 20) отображать отображение, указывающее измененные значения параметров. Например, тележка 20 может изменять цвет, рисунок и т.п. света, излучаемого блоком 224 отображения, в соответствии с измененными значениями параметров. В качестве альтернативы, тележка 20 может вызвать блок 226 вывода звука выводить звук, соответствующий измененным значениям параметров. Например, тележка 20 может изменять тип, громкость и тому подобное звука, выводимого блоком 226 вывода звука, в соответствии с измененными значениями параметров.
20-3. Модификация 3
Хотя форма коврика 30 представляет собой плоскую поверхность в примере, показанном на фиг. 1, форма не ограничена примером. В модификации коврик 30 может иметь складную форму, позволяющую поднимать коврик 30, как показано на фиг. 86. В примере, показанном на фиг. 86, коврик 30 выполнен с возможностью изменять высоту углубления независимо от того, сложен ли коврик 30 в вертикальном направлении или в горизонтальном направлении. Обратите внимание, что шаблон складывания не ограничен примером.
Фиг. 87 является схемой, иллюстрирующей ситуацию, в которой коврик 30, показанный на фиг. 86 складывается для поднятия нижней части, и тележка 20 размещается на верхней поверхности коврика 30. Как показано на фиг. 87, согласно модификации, один коврик 30 может реализовывать форму, похожую на борцовский мат. Это может дополнительно использовать преимущество игры, в которую играют в реальном пространстве.
Следует отметить, что, как описано выше, устройство 10 для обработки информации может указывать, упала ли тележка 20 с коврика 30, на основании значения измерения датчика ускорения в тележке 20, истории информации положения, считанной тележкой 20 с коврика 30 и тому подобное.
20-4. Модификация 4
В другой модификации коврик 30 может включать в себя три слоя (носитель 330 (например, бумага для картона или тому подобное) и два коврика 332), как показано на фиг. 88. В частности, коврики 332 могут быть закреплены на обеих поверхностях носителя 330. Информация положения записывается в отдельные коврики 332, например, в виде сетки (как в коврике 30). Согласно модификации, могут быть реализованы два типа игр одним ковриком 30, как показано на фиг. 89. То есть, различные игры могут быть реализованы путем размещения передней поверхности 332a вверх и размещения задней поверхности 332b вверх.
20-5. Модификация 5
В другой модификации коврик 90 другой формы, как показано на фиг. 90-94 можно использовать вместо коврика 30, показанного на фиг. 1. Например, полусферический объект 902a может быть закреплен под частью 900a коврика, как в коврике 90a, показанном на фиг. 90. Альтернативно, объект 902b в форме пирамиды (например, четырехугольная пирамида, шестиугольная пирамида или тому подобное) может быть закреплен под частью 900b коврика, как в коврике 90b, показанном на фиг. 91. Альтернативно, например, выступ 902c, по которому может перемещаться тележка 20, может быть установлен на части 900c коврика , как в коврике 90c, показанном на фиг. 92. Альтернативно, например, отверстие 902d, большее, чем размер тележки 20, может быть предусмотрено в части 900d коврика, как в коврике 90d, показанном на фиг. 93. Альтернативно, коврик 90 может иметь форму поворотного стола. Например, как показано на фиг. 94, часть 900e коврика может быть установлена на основании 902e, и часть 900e коврика может вращаться автоматически или вручную. В случаях использования ковриков 90 в играх могут быть использованы дополнительные физически полезные эффекты.
20-6. Модификация 6
Функции устройства 10 для обработки информации в соответствии с вариантами осуществления могут быть реализованы одним компьютером или могут быть реализованы множеством компьютеров, работающих вместе. Кроме того, устройство 10 для обработки информации может включать в себя множество устройств.
20-7. Модификация 7
Хотя устройство 10 для обработки информации является игровым устройством, как показано на фиг. 1 в примерах, описанных в вариантах осуществления, устройство 10 для обработки информации не ограничивается этим примером. Например, устройство 10 для обработки информации может представлять собой сервер, персональный компьютер общего назначения (РС), планшетный терминал, мобильный телефон, такой как смартфон, портативный музыкальный проигрыватель, телевизионный приемник, носимое устройство, такое как дисплей, установленный на голове (HMD), робот или тому подобное.
20-8. Модификация 8
В другой модификации дрон (летающий объект) может быть установлен вместо тележки 20. Дрон является примером движущегося тела согласно настоящему изобретению. Следует отметить, что устройство 10 для обработки информации может быть встроено в дрон или может быть встроено в устройство, такое как смартфон.
Далее подробности модификации будут описаны более конкретно. Традиционно, используют известный способ, в котором установлен маркер, указывающий взлет и посадку дрона или указывающий конкретное место, и устройство формирования изображения, которое установлено на дроне и которое снимает изображение области ниже, принимает изображение установленного маркера, чтобы тем самым помочь управлению перемещению дрона. Дополнительно, данные датчика, полученные от датчика изображения, датчика глобальной системы позиционирования (GPS), инерциального датчика, ультразвукового датчика, барометра и т.п., независимо или в целом используются в обычном дроне для определения положения дрона на открытом пространстве. Однако точность определения положения данных датчика для наружного пространства недостаточна для управления положением дрона в относительно узком пространстве, таком как внутреннее пространство. Следовательно, ожидают, что повышение точности определения местоположения дрона будет контролировать полет дрона во внутреннем пространстве.
Для управления полетом дрона для управления траекторией полета дрона может быть использована информация положении, указывающая шаблон расстановки в настоящем изобретении. Обратите внимание, что «шаблон расстановки» в данном случае включает в себя традиционно используемые маркеры. Дополнительно, управление перемещением тележки 20 может применяться к управлению полетом дрона в настоящем изобретении, если явно не указано иное.
В настоящем изобретении полет дрона управляется на основании множества фрагментов информации положения, включенной в состав шаблон расстановки. Шаблон расстановки может быть напечатан на одном коврике или может быть напечатан на множестве ковриков, как в вариантах осуществления, относящиеся к тележке 20. В качестве альтернативы, может быть надлежащим образом использован носитель информации, отличный от коврика. Дополнительно, полетом дрона можно управлять так, что дрон автономно перемещается между ковриками, отделенными друг от друга и расположенными в заранее определенных позиционных отношениях. Каждый коврик может указывать, по меньшей мере, один фрагмент информации положения коврика, который будет выполнять дрон. В качестве альтернативы, в дрон может быть загружена таблица данных из сети, включающая в себя данные каждого заранее записанного коврика, и полет между ковриками можно контролировать путем сравнения кода каждого коврика и таблицы данных.
Варианты осуществления, в которых коврики расположены отдельно, пригодны не только для управления полетом во внутреннем пространстве, но также для управления полетом во внешнем пространстве. В частности, шаблон расстановки, указывающий информацию положения, соответствующую промежуточной точке, может быть установлен в каждой из множества промежуточных точек на траектории полета, соединяющей точку взлета и точку посадки дрона в открытом пространстве. Затем можно управлять автономным полетом или полетом дрона вручную на основании промежуточных точек, установленных таким образом. Обратите внимание, что управление полетом через промежуточные точки, обеспеченные шаблонами расстановки, может применяться в сочетании (интегрированным образом) с управлением полетом с использованием обычно используемого GPS.
Конфигурация может обеспечивать управление полетом дрона с более высокой точностью определения местоположения, чем точность определения местоположения дрона на основе GPS или тому подобного.
Для определения высоты полета дрона может быть использован шаблон расстановки по настоящему изобретению. В частности, высота полета дрона может быть обнаружена на основании размера шаблона расстановки, полученного распознаванием изображений, и полет дрона может управляться на основании обнаруженной высоты полета. Более конкретно, можно признать, что чем меньше размер шаблона, тем выше высота.
Обратите внимание, что в случае управления высотой дрона на основании шаблона расстановки взлета и посадки, приближением или удаления дрона и шаблона расстановки может привести к тому, что шаблон расстановки станет слишком большим на изображении, так что шаблон расстановки не попадает в угол обзора или может привести к тому, что шаблон расстановки станет слишком маленьким на изображении, так что шаблон расстановки нее будет распознан. Чтобы решить данную техническую задачу, первый шаблон расстановки первого размера и второй шаблон расстановки второго размера, превышающего первый размер, могут быть расположены, по существу, в одной и той же позиции в реальном пространстве. Более конкретно, первый шаблон расстановки и второй шаблон расстановки могут быть расположены таким образом, что центр первого шаблона расстановки и центр второго шаблона расстановки, по существу, совпадают. Когда принимается комбинация шаблонов расстановки, центр первого шаблона расстановки располагают в центре второго шаблона расстановки. Следовательно, чтобы распознать комбинацию шаблонов расстановки, центр каждого шаблона расстановки может быть распознан (проигнорирован) дроном как область, не обеспеченная информацией управления, включающая в себя информацию положения. Дополнительно, размер первого шаблона расстановки может быть равен или меньше размера области, не содержащей информации управления во втором шаблоне расстановки.
В соответствии с конфигурацией первого шаблона расстановки и второго шаблона расстановки будут распознавать первый шаблон расстановки, когда дрон приближается к посадочной поверхности, даже в том случае, когда второй шаблон расстановки не попадает в угол обзора при приземлении дрона. Таким образом, может быть точно определена высота полета дрона. В результате, воздействие на дрон при взлете и посадке, в частности, при посадке, уменьшается и, например, жизненный цикл изделия дрона может быть увеличен.
Что касается управления высотой полета дрона, высотой можно управлять в соответствии с количеством блоков шаблонов расстановки в угле обзора, вместо управления ссылками на размеры отдельных шаблонов расстановки. Более конкретно, можно признать, что чем больше количество блоков шаблонов расстановки в угле обзора, тем выше высота над уровнем моря. Следует отметить, что блок шаблона расстановки в данном случае означает минимальный блок шаблона, указывающий информацию положения, и можно предположить, что на одном коврике размещают множество блоков шаблонов расстановки (носителе информации).
20-9. Модификация 9
Этапы в последовательности операций процессов в вариантах осуществления могут не обрабатывать в описанных порядках. Например, порядки этапов могут быть соответствующим образом изменены и обработаны. Дополнительно, часть этапов может обрабатываться параллельно или обрабатываться индивидуально вместо обработки этапов в хронологическом порядке. Дополнительно, часть этапов может быть пропущена, или могут быть добавлены другие этапы.
В соответствии с вариантами осуществления также может быть предоставлена компьютерная программа для аппаратного обеспечения, такого как CPU 150, ROM 152 и RAM 154, для достижения функций, эквивалентных компонентам устройства 10 для обработки информации в соответствии с вариантами осуществления. Дополнительно, также предусмотрен носитель данных, записывающий компьютерную программу.
Дополнительно, полезные эффекты, описанные в настоящем описании, являются только пояснительными или иллюстративными и не предназначены для ограничения. Таким образом, в дополнение или вместо преимущественных эффектов, описанных выше, технология согласно настоящему изобретения может достигать других полезных эффектов из описания настоящего описания, очевидных для специалистов в данной области техники.
Следует отметить, что следующая конфигурация также относится к технической области настоящего изобретения.
(1). Устройство для обработки информации включает в себя:
блок получения информации, который получает информацию положения от датчика, выполненного с возможностью считывать заданный шаблон расстановки; и
блок управления перемещением, который управляет перемещением первого движущегося тела, включающее в себя перемещение в реальном пространстве, на основании информации положения.
(2). Устройство для обработки информации по (1) дополнительно включает в себя:
блок коррекции положения, который корректирует информацию положения, полученную от датчика, на основании положения крепления датчика на первом движущемся теле, в котором
блок управления перемещением управляет перемещением первого движущегося тела на основании скорректированной информации положения.
(3). Устройство для обработки информации по (2), в котором
блок коррекции положения корректирует информацию положения, полученную от датчика, к информации положения, которая указана из положения крепления и которая соответствует, по существу, центру первого движущегося тела, и
блок управления перемещением управляет перемещением первого движущегося тела на основании скорректированной информации положения.
(4). Устройство для обработки информации по (3), в котором
датчик прикреплен к первому движущемуся телу отдельно от, по существу, центра первого движущегося тела в горизонтальном направлении.
(5). Устройство для обработки информации по (4), в котором
датчик прикреплен к передней части первого движущегося тела в горизонтальном направлении.
(6). Устройство для обработки информации по любому из (1) - (5), в котором
в случае наличия отклонения в получении информации положения, блок управления перемещением управляет первым движущимся телом так, что первое движущееся тело автоматически перемещается в заданное положение.
(7). Устройство для обработки информации по (6), в котором
в случае наличия отклонения в получении информации положения, блок управления перемещением управляет первым движущимся телом так, что первое движущееся тело движется назад.
(8). Устройство для обработки информации по (6), в котором
в случае наличия отклонения в получении информации положения, блок управления перемещением управляет первым движущимся телом так, что первое движущееся тело автоматически перемещается, пока не будет получена информация положения.
(9). Устройство для обработки информации по (6), в котором
блок управления перемещением управляет направлением перемещения первого движущегося тела на основании направления перемещения первого движущегося тела непосредственно перед возникновением отклонения в получении информации положения.
(10). Устройство для обработки информации по любому из (1) - (9), в котором
заданный шаблон расстановки включает в себя:
первый шаблон расстановки, включающий в себя множество различных шаблонов, определяющих, по меньшей мере, информацию положения относительно реального пространства; и
второй шаблон расстановки, определяющий информацию управления относительно перемещения движущегося тела, и
блок управления перемещением управляет перемещением первого движущегося тела на основании информации положения, полученной на основании считывания первого шаблона расстановки датчиком, и информации управления, полученной на основании считывания второго шаблона расстановки датчиком.
(11). Устройство для обработки информации по (10), в котором
информация управления является информацией управления, по меньшей мере, одного из скорости перемещения, шаблона перемещения и вращательного движения первого движущегося тела.
(12). Устройство для обработки информации по любому из (1)-(11) дополнительно включает в себя:
блок обнаружения внешней силы, который обнаруживает внешнюю силу для первого движущегося тела, в котором
блок управления перемещением управляет перемещением первого движущегося тела дополнительно на основании результата обнаружения внешней силы.
(13). Устройство для обработки информации по любому из (1)-(12) дополнительно включает в себя:
блок связи, который устанавливает связь со вторым движущимся телом, в котором
блок управления перемещением управляет позиционным соотношением между первым движущимся телом и вторым движущимся телом на основании связи, установленной блоком связи.
(14). Устройство для обработки информации по (13), в котором
заданный шаблон расстановки включает в себя третий шаблон расстановки, определяющий совместное управление первым движущимся телом и вторым движущимся телом, и
блок управления перемещением управляет позиционным соотношением между первым движущимся телом и вторым движущимся телом на основании информации, полученной на основе считывания третьего шаблона расстановки датчиком.
(15). Устройство для обработки информации по любому из (1)-(14), в котором
заданный шаблон расстановки включает в себя четвертый шаблон расстановки относительно перемещения объекта, отличного от первого движущегося тела, и
блок управления перемещением электрически соединен с первым движущимся телом и выполнен с возможностью управлять перемещением объекта, прикрепленного к первому движущемуся телу, на основании информации, полученной на основании считывания четвертого массива расстановки датчиком.
(16). Способ обработки информации включает в себя:
получение информации положения от датчика, выполненного с возможностью считывать заданный шаблон расстановки; и
использование процессора для управления перемещением первого движущегося тела, включающее в себя перемещение в реальном пространстве, на основании информации положения.
(17). Носитель информации включает в себя:
первый шаблон расстановки, включающий в себя множество различных шаблонов, определяющих информацию положения относительно реального пространства, причем первый шаблон расстановки имеет первую область; и
второй массив расстановки, определяющий информацию управления относительно перемещения движущегося тела, причем второй массив расстановки имеет вторую область, меньшую, чем первая область.
(18). Носитель информации по (17), в котором
второй шаблон расстановки определяет комбинацию множества различных шаблонов первого шаблона расстановки.
(19). Носитель информации по (17) или (18), в котором
информация управления включает в себя информацию управления, по меньшей мере, одного из скорости перемещения, шаблона перемещения и вращательного движения движущегося тела.
(20). Носитель информации по любому из (17) - (19), в котором
носитель информации включает в себя:
первый носитель информации; и
второй носитель информации, независимый от первого носителя информации и имеющий область, меньшую, чем первый носитель информации,
первый шаблон расстановки предоставлен на первом носителе информации, и
второй шаблон расстановки предоставлен на втором носителе информации.
Список ссылочных позиций
10 устройство для обработки информации
20 тележка
22 кассета
24 тележка для мяча
30, 90 коврик
40 игрушка
100, 200 блок управления
102 блок получения информации
104 блок спецификация информации о коврике
106 блок управления перемещением
108 блок управления выходом
110 блок обнаружения внешней силы
112 блок коррекции информации положения
120, 220 блок связи
122 операционный блок
124, 224 блок отображения
126, 226 блок вывода звука
128 блок подключения кассеты
130 блок хранения
222 блок ввода
228 сенсорный блок
230 блок беспроводной связи ближнего радиуса действия
232 блок привода
234 серводвигатель
Реферат
Предложены устройство обработки информации, способ обработки информации и носитель информации, позволяющие управлять перемещением движущегося тела в соответствии с информацией положения, соответствующей заданному шаблону расстановки. Устройство обработки информации включает в себя блок получения информации, выполненный с возможностью получения информации положения от датчика, выполненного с возможностью считывать заданный шаблон расстановки, и блок управления перемещением, выполненный с возможностью управления перемещением первого движущегося тела, включающего в себя перемещение в реальном пространстве, на основании информации положения. 3 н. и 6 з.п. ф-лы, 94 ил.
Комментарии