Транспортное средство, в частности игрушечный робот с вибродвигателем, содержащим передний дебаланс - RU2506108C2
Код документа: RU2506108C2
Чертежи









Описание
Ссылка на сопутствующие заявки
В настоящей заявке испрашивается приоритет по предварительной заявке на патент США № 61264023, поданной 25 сентября 2009 года, все содержание которой включено в настоящее описание путем ссылки.
Область изобретения
Настоящее изобретение относится к транспортному средству с вибрационным приводом, в частности к игрушечному роботу с вибродвигателем и множеством ног, в котором игрушечные роботы напоминают небольших живых ползающих животных или жуков.
Предпосылки к созданию изобретения
Специалистам известны транспортные средства с вибродвигателями, которые именуются "виброботы".
Одной особой формой "вибробота" является так называемый "щетинобот" ("bristlebot"), который содержит отрезанную головку зубной щетки, батарейку и вибродвигатель. "Щетинобот" поддерживается на земле щетинками головки зубной щетки, таким образом щетинки соответствуют в определенной степени ногам "щетинобота". И батарейки, и вибродвигатель расположены на верхней стороне головки зубной щетки. Под действием вибрации вся головка зубной щетки совершает колебания и "щетинобот" может двигаться вперед.
Тип движения вперед и механические свойства "щетинобота", однако, совершенно неудовлетворительны во многих отношениях. Например, "щетинобот" не похож на живого жука с точки зрения пользователя или другого лица, а выглядит просто как вибрирующая головка зубной щетки.
Краткое описание изобретения
Настоящее изобретение относится к транспортному средству по п.1 или по п.2 формулы. Зависимые пункты относятся к преимущественным конструкциям по настоящему изобретению.
Транспортное средство по настоящему изобретению имеет множество ног и вибрационный привод. В настоящем изобретении термин "транспортное средство" относится к движущемуся роботу любого типа, в частности к игрушечному роботу вообще и к игрушечным роботам, имеющим форму жука или какого-либо другого животного, насекомого или рептилии.
Согласно одному аспекту настоящего изобретения ноги транспортных средств могут быть изогнуты под углом или согнуты криволинейно и могут быть выполнены гибкими. Вибродвигатель может генерировать силу (Fv), направленную вниз и способную отклонить по меньшей мере передние ноги так, что транспортное средство движется вперед. Ноги транспортного средства преимущественно наклонены в направлении, которое смещено от вертикали. Основания ног, таким образом, расположены на транспортном средстве дальше вперед, чем концы ног. В частности, передние ноги выполнены с возможностью отклоняться, когда транспортное средство совершает колебания под действием вибродвигателя. Наоборот, вибродвигатель также может генерировать силу (Fv), направленную вверх, и достаточную для подпрыгивания транспортного средства или для подъема передних ног от поверхности земли.
Согласно другому аспекту настоящего изобретения геометрия задних ног может быть такой, что достигается различный тормозящий эффект или эффект волочения. Другими словами, геометрия задних ног может быть такой, чтобы противодействовать тенденции к вращению из-за колебаний вибродвигателя. Вращающийся дебаланс движется во время подъема передних ног в боковом направлении относительно продольной оси транспортного средства так, что без принятия контрмер транспортное средство будет двигаться по кривой. Контрмеры могут быть различными: к одной передней ноге можно сместить большую массу, чем к другой передней ноге. Длину одной задней ноги можно увеличить по сравнению с другой задней ногой. Жесткость ног с одной стороны можно увеличить по сравнению с ногами на другой стороне. Одна задняя нога может быть толще по сравнению с другой задней ногой на другой стороне. Одна из задних ног может быть расположена дальше вперед, чем другая задняя нога.
Согласно другому аспекту настоящего изобретения транспортное средство может быть сконструировано так, чтобы поворачиваться и выпрямляться за счет вращающего момента вибродвигателя. Этого можно добиться, например, поместив центр тяжести корпуса или транспортного средства рядом с осью вращения вибродвигателя или на этой оси. Дополнительно, боковые и верхняя стороны транспортного средства могут быть сконструированы так, чтобы позволить транспортному средству самостоятельно выпрямляться при вибрации. Таким образом, высшую точку можно разместить на верхней стороне транспортного средства, чтобы транспортное средство не могло лежать полностью перевернутым на спину. Однако на боковинах и/или на спине такого транспортного средства можно разместить ребра, пластины или выступы, внешние точки которых преимущественно расположены рядом с виртуальным цилиндром или на нем.
Согласно другому аспекту настоящего изобретения ноги могут быть расположены в два ряда, при этом между корпусом транспортного средства и ногами транспортного средства имеется пространство, в частности V-образное углубление, так чтобы ноги могли изгибаться внутрь во время переворота при выпрямлении. Таким образом, движение выпрямления транспортного средства упрощается, если оно должно опрокинуться. Преимущественно, ноги расположены в два ряда, а также сбоку от оси вращения вибродвигателя и над этой осью.
Согласно другому аспекту изобретения транспортное средство может иметь упругий носик или упругую переднюю часть, чтобы транспортное средство отскакивало при ударе о препятствие. Упругий носик или упругая передняя часть преимущественно выполнена из резины. Дополнительно, упругий носик или упругая передняя часть преимущественно имеет конструкцию, сходящуюся в точку. Таким образом, транспортное средство может легче обойти препятствие без использования датчиков или какого-либо другого устройства управления направлением движения.
Согласно другому аспекту настоящего изобретения вибрационный привод может иметь двигатель и дебаланс, где дебаланс расположен перед передними ногами. Таким образом достигается усиленное подъемное движение передних ног, при этом задние ноги остаются в максимально возможной степени на земле (но также могут немного подскакивать). В частности, дебаланс расположен перед двигателем. Дополнительно, батарейка преимущественно расположена в задней части транспортного средства для увеличения веса, поддерживаемого задними ногами. И батарейка, и двигатель преимущественно расположены между ногами. Ось вращения двигателя может быть ориентирована вдоль продольной оси транспортного средства.
Согласно принципам настоящего изобретения транспортное средство может быть сконструировано с вибродвигателем и копировать органическую форму жизни, в частности, живого жука или небольшого животного, в отношении скорости перемещения, стабильности движения вперед, тенденции к перемещению, способности выпрямляться и/или индивидуальности.
Настоящее изобретение может быть устройством, в частности, транспортным средством или игрушечным роботом с вибрационным двигателем, который преследует одну или более из следующих целей.
1. Создание транспортного средства с вибродвигателем с гибкими ногами в различных конфигурациях.
2. Максимизация скорости транспортного средства.
3. Изменение преобладающего направления движения транспортного средства.
4. Предотвращение переворачивания транспортного средства.
5. Создание транспортных средств, которые могут самостоятельно выпрямляться.
6. Генерирование движения, напоминающего движения живых организмов, в частности жуков, насекомых, рептилий и других небольших животных.
7. Генерирование многочисленных режимов движения, чтобы транспортные средства визуально отличались друг от друга своими движениями, чтобы создать множество разных типов транспортных средств.
8. Генерирование кажущегося интеллекта при встрече с препятствиями.
Эти аспекты и пути их достижения подробно описаны ниже со ссылками на приложенные чертежи.
Краткое описание чертежей
Фиг.1А и 1В - транспортное средство или игрушечный робот по первому варианту настоящего изобретения.
Фиг.2А-2F - силы, которые могут действовать на транспортное средство или игрушечный робот по одному варианту настоящего изобретения (на фиг.2C показан вид спереди).
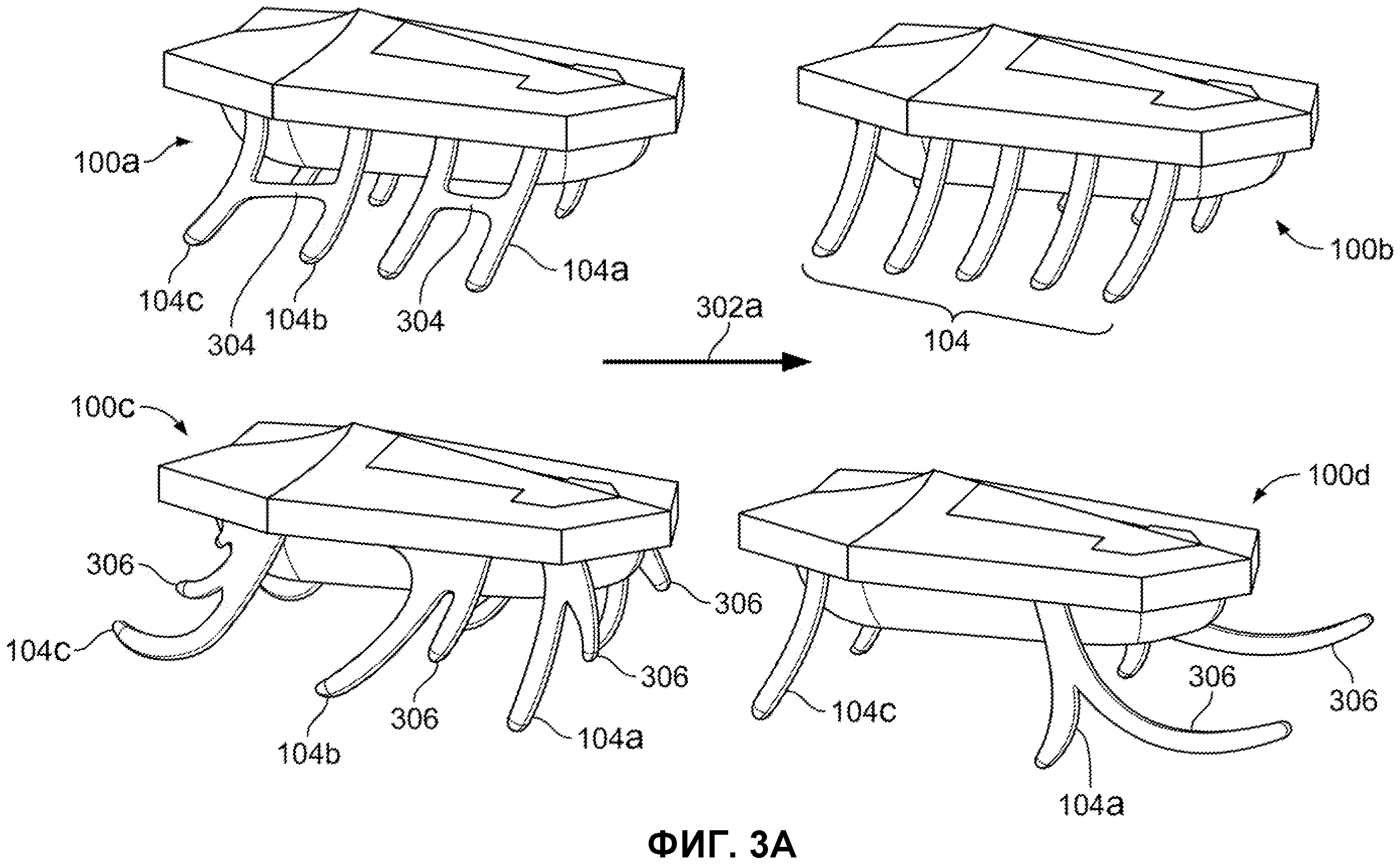
Фиг.3A-3C - транспортные средства или игрушечные роботы по различным другим вариантам настоящего изобретения с модифицированной конструкцией ног.
Фиг.4A и 4B - транспортное средство или игрушечный робот по другому варианту настоящего изобретения с регулируемыми задними ногами.
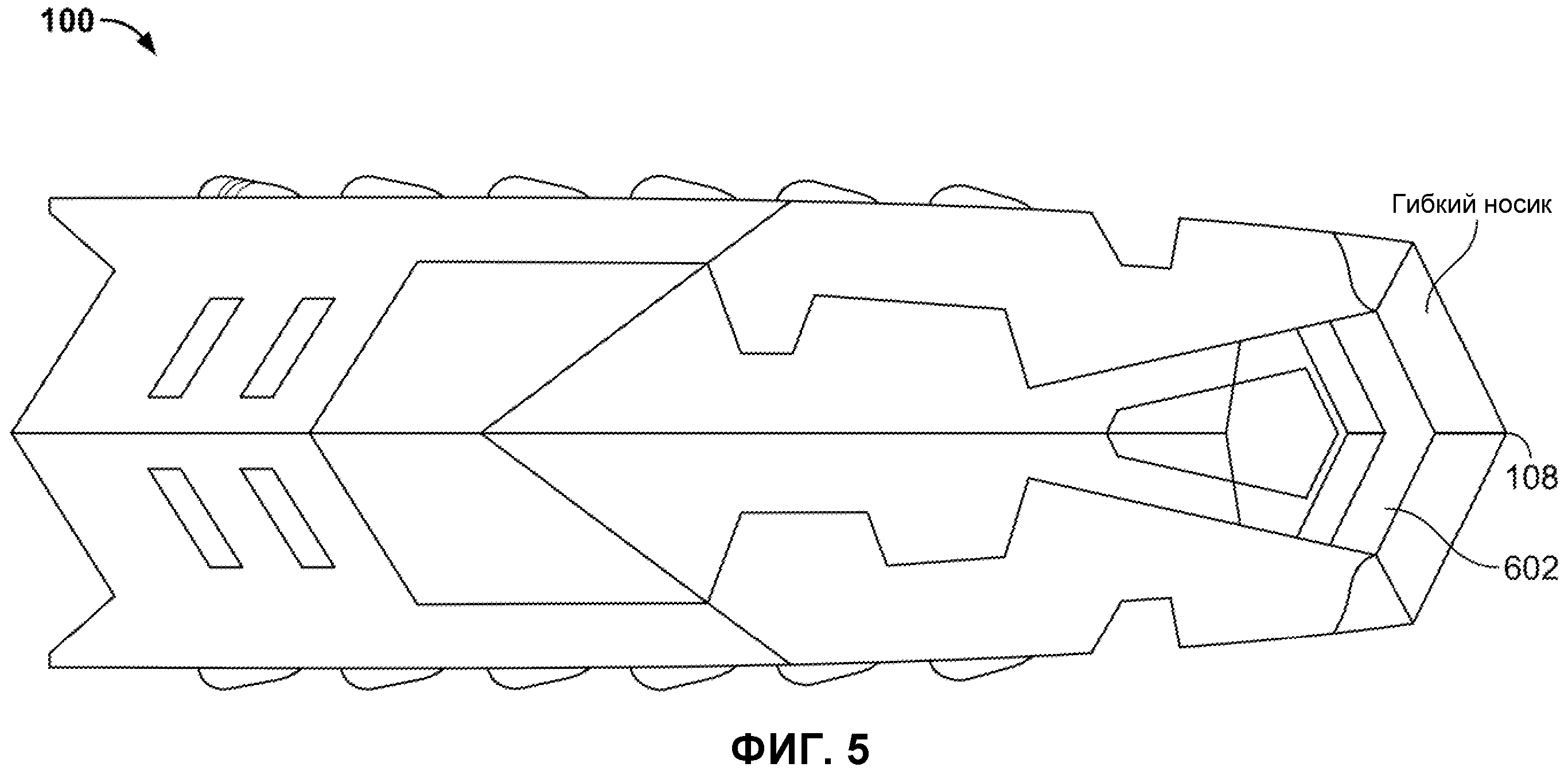
Фиг.5 - транспортное средство или игрушечный робот по другому варианту настоящего изобретения с гибким носиком.
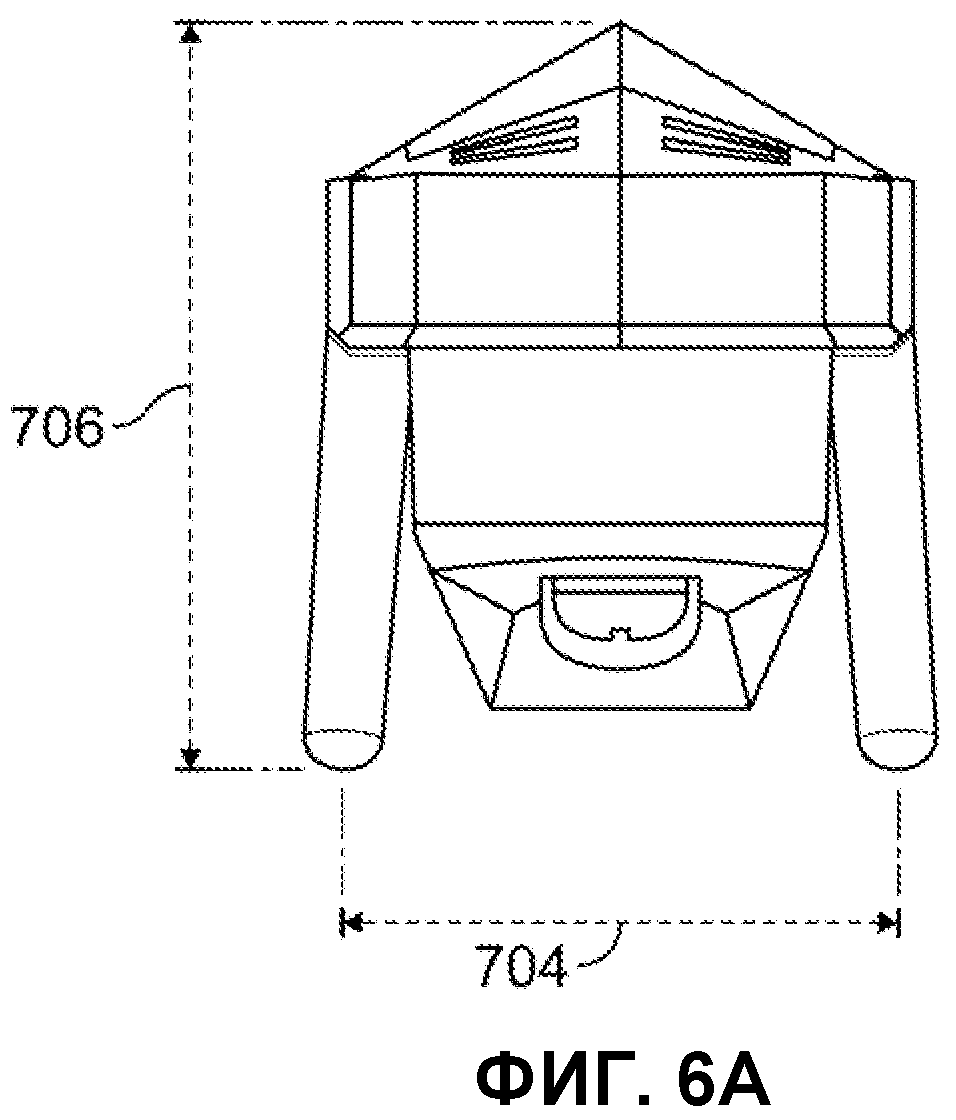
Фиг.6A и 6B - транспортное средство или игрушечный робот по первому варианту.
Фиг.7 - транспортное средство или игрушечный робот по другому варианту настоящего изобретения с дополнительными ребрами, пластинами или выступами.
Подробное описание изобретения
На фиг.1A и 1B показано транспортное средство или игрушечный робот по первому варианту настоящего изобретения.
Транспортное средство 100 с вибрационным приводом например, миниатюрный игрушечный робот, может иметь тело с двумя или более ногами 104, выполненными с возможностью изгибаться когда транспортное средство вибрирует так, чтобы транспортное средство имело тенденцию двигаться в определенном направлении. Например, ноги могут изгибаться или могут быть наклонены в направлении, которое несколько смещено от вертикали и могут быть выполнены из гибкого или гнущегося материала. Тело транспортного средства может содержать двигатель для генерирования вибраций и может иметь относительно низко расположенный центр тяжести. Форма верхней части тела может быть выступающей, чтобы упростить самостоятельное выпрямление транспортного средства при вибрациях. Геометрия задних ног может быть задана такой (например, относительно длины или толщины ног), чтобы достигался разный тормозной эффект или эффект волочения, чтобы противодействовать стремлению к повороту из-за вибраций двигателя или чтобы создать тенденцию к повороту в определенном направлении. Если используется множество ног, некоторые ноги (например, те, которые расположены между передними "ведущими" ногами и задними "волочащимися" ногами) могут иметь несколько более короткую конструкцию, чтобы предотвратить дополнительный эффект торможения или волочения.
На фиг.2A-2F показаны общие силы, действующие на транспортное средство или игрушечный робот по одному варианту настоящего изобретения (на фиг.2C показан вид спереди).
Двигатель вращает дебаланс, который генерирует крутящий момент и вектор силы, как показано на фиг.2A-2D. Если вертикальная сила Fv отрицательна (т.е. направлена вниз), это приводит к отклонению ног, которые выполнены с возможностью сгибания и/или искривления, и тело транспортного средства до участка ног, касающихся земли, движется вперед. Если вертикальная сила Fv положительна (т.е. направлена вверх), то возникает эффект, при котором транспортное средство начинает подпрыгивать так, что передние ноги отрываются от поверхности земли и восстанавливают свою нормальную геометрическую форму (т.е. без дополнительного эффекта сгибания под действием внешней силы). Во время такого движения некоторые ноги, в частности две задние ноги, только скользят сзади и не подпрыгивают. Совершающий колебания дебаланс может вращаться с частотой несколько сотен оборотов в секунду, поэтому транспортное средство совершает колебания и движется в заданном направлении, по существу, вперед.
Вращение двигателя также создает направленную вбок вертикальную силу Fh (см. фиг.2B и 2C), которая направлена в одну сторону (т.е. либо вправо, либо влево), когда носик транспортного средства поднят, и в другую сторону, когда носик транспортного средства прижат вниз. Сила Fh стремится далее повернуть транспортное средство, когда носик поднят. Это явление может создать поворачивающее движение, кроме того, можно манипулировать разными характеристиками движения, в частности скоростью, преобладающим направлением движения, наклоном и процессом самостоятельного выпрямления.
Одним важным признаком геометрии ног является относительное положение "основания" ноги (т.е. той части ноги, которая прикреплена к телу, т.е. в определенной степени "тазобедренному суставу") относительно кончика ноги (т.е. другого конца ноги, касающегося поверхности земли). Изменяя конструкцию гибких ног можно менять манеру движения транспортного средства.
Транспортное средство движется в направлении, соответствующем положению основания ноги, расположенному перед положением конца ноги. Если вертикальная сила Fv отрицательна, тело транспортного средства прижимается вниз. Следовательно, тело наклоняется так, что основание ноги поворачивается вокруг конца ноги и в направлении поверхности, поэтому тело, в свою очередь, движется от конца ноги к основанию ноги. Наоборот, если основание ноги расположить над концом ноги, то тело будет просто подпрыгивать и не будет перемещаться в общем (вертикальном) направлении.
Изогнутая конструкция ноги усиливает направленное вперед движение путем увеличения отклонения ноги по сравнению с прямой ногой.
Увеличить скорость транспортного средства до максимума можно разными способами. Увеличение скорости транспортного средства важно для улучшения визуального восприятия изделия, которое должно напоминать жука, насекомое или рептилию, чтобы оно на самом деле действовало как живое существо. Факторами, которые влияют на скорость, являются частота и амплитуда вибрации, материал ноги (т.е. пониженное трение задних ног приводит к увеличению скорости), длина ноги, способность ноги к отклонению, геометрия одной ноги относительно другой ноги и количество ног.
Частота вибрации (т.е. частота вращения двигателя) и скорость транспортного средства прямо пропорциональны. То есть, когда частота вращения двигателя увеличивается, а все остальные факторы остаются неизменными, транспортное средство будет двигаться быстрее.
Некоторые свойства материала, из которого сделаны ноги, оказывают влияние на скорость. Коэффициент трения ног определяет их вклад в торможение или тяговое усилие, действующее на транспортное средство. Поскольку материал ног может иметь повышенный коэффициент трения относительно поверхности, тормозное или тяговое усилие также может быть увеличено, и транспортное средство будет двигаться медленнее. Поэтому для ног, особенно для задних ног, важно выбрать материал с низким коэффициентом трения. Например, подходит полистирол-бутадиен-стирол с величиной твердости по твердомеру приблизительно 65 единиц. Свойства материала ног также оказывают влияние - как функция толщины и длины ног - на жесткость, которая в конечном итоге определяет, насколько будет определяться подпрыгивающий эффект транспортного средства. Если общая жесткость ног увеличивается, скорость транспортного средства также увеличивается. Наоборот, более длинные и тонкие ноги имеют меньшую жесткость, поэтому скорость транспортного средства будет ниже.
Если тормозное или тяговое усилие (или коэффициент торможения/тяги) задних ног в соответствии с мерами, приведенными выше, уменьшено, в частности, по сравнению с передними или ведущими ногами, скорость существенно возрастет, поскольку тормозное или тяговое усилие будут развивать только задние ноги.
На преимущественное направление движения транспортного средства можно влиять разными способами. В частности, направление движения можно регулировать весовой нагрузкой на определенные ноги, количеством ног, расположением ног, жесткостью ног и соответствующим коэффициентом торможения или тягового усилия.
Естественная, направленная вбок сила Fh заставляет транспортное средство поворачиваться (см. фиг.2B, 2C, 2D). Если транспортное средство движется прямо вперед, то эту силу следует устранить. Это можно сделать, изменив геометрию ног и подбором соответствующего материала для ног.
Как показано на фиг.2C и 2D, снабженный эксцентриковым вращающимся дебалансом двигатель генерирует (немного наклонно направленный) вектор Vmotor скорости, боковая компонента которого создается действующей вбок силой Fh (на фиг.2C показан эффект этой силы при виде на транспортное средство спереди). Если это направление движения нужно изменить, то одна или более из реактивных сил F1-F4 (см. фиг.2D), действующих на ноги, должны создать другой вектор скорости. Этого можно достичь следующими способами (одним или в комбинации):
(1) Влияние на вектор F1 или F2 привода ведущих ног для противодействия вектору Vmotor скорости: в ситуации, показанной на фиг.2D, на правую переднюю ногу можно возложить больший вес для увеличения вектора F2 скорости и таким образом для противодействия в поперечном направлении вектору Vmotor скорости (для противоположного направления вращения двигателя, при котором вектор скорости направлен наклонно вправо, наоборот, больший вес следует возложить на левую переднюю ногу).
(2) Влияние вектора F3 или F4 торможения или тягового усилия для противодействия вектору Vmotor: этого можно достичь, увеличив длину правой задней ноги или увеличив коэффициент торможения или тягового усилия на правой задней ноге для увеличения вектора F4 скорости, показанного на фиг.2D (для противоположного направления вращения двигателя, при котором вектор скорости направлен наклонно вправо, наоборот, следует соответственно изменить левую заднюю ногу).
(3) Увеличение жесткости ног на правой стороне (например, за счет увеличения толщины ног) для увеличения векторов F2 и F4 скорости, показанных на фиг.2D (для противоположного направления вращения двигателя, при котором вектор скорости направлен наклонно вправо, наоборот, следует соответственно увеличить жесткость ног на левой стороне).
(4) Изменение относительного положения задних ног так, чтобы вектор торможения или тягового усилия указывал в том же направлении, что и вектор Vmotor скорости, показанный на фиг.2D, при этом правая задняя нога должна быть расположена дальше вперед, чем левая задняя нога (для противоположного направления вращения двигателя, при котором вектор скорости направлен наклонно вправо, наоборот, следует расположить левую заднюю ногу дальше вперед, чем правая задняя нога).
Для предотвращения переворачивания транспортного средства или для снижения риска его переворачивания (который очень велик для "виброботов" по предшествующему уровню техники), можно принять разные меры.
В транспортном средстве по настоящему изобретению преимущественно центр тяжести тела (т.е. центр тяжести) расположен как можно ниже, как показано на фиг.2E. Кроме того, ноги, особенно правый ряд ног и левый ряд ног, должны находиться относительно далеко друг от друга. Согласно настоящему изобретению ноги или ряды ног расположены по бокам транспортного средства, более конкретно, сбоку от оси вращения двигателя. Более конкретно, ноги или ряды ног прикреплены к телу транспортного средства над центром тяжести (см. фиг.2C, 2E и 2F), т.е. каждое основание или каждая точка подвески ног прикреплена к телу транспортного средства над центром тяжести (см. также фиг.1). Что касается оси вращения двигателя, ноги прикреплены или подвешены сбоку и над этой осью (см. фиг.2C и 2E). Это позволяет расположить и двигатель, и батарейку (и, факультативно, выключатель) между ногами. Таким образом, центр тяжести тела можно расположить очень близко к земле, чтобы предотвратить переворачивание или снизить риск переворачивания.
Кроме того, можно принять различные меры, направленные на автоматическое возвращение транспортного средства в нормальное положение после переворота, если оно лежит на спине или на боку. Это нужно потому, что несмотря на принятые меры по предотвращению переворачивания, транспортное средство все же может перевернуться на спину или на бок.
Согласно настоящему изобретению для поворота транспортного средства и возврата его в нормальное положение после переворачивания можно использовать крутящий момент двигателя. Этого можно достичь за счет того, что центр тяжести тела (т.е. центр тяжести) расположен близко к оси вращения или лежит на ней (см. фиг.2F). Следовательно, транспортное средство стремится повернуть все тело вокруг этой оси. Вращение тела или транспортного средства происходит в направлении, противоположном направлению вращения двигателя.
Если такими конструктивными мерами будет создана такая тенденция к вращению, транспортному средству также можно придать другую форму так, чтобы вращение вокруг оси вращения тела или двигателя происходило только, когда транспортное средство лежит на спине или на боку.
Следовательно, на верхней стороне, т.е. на спине транспортного средства, можно поместить высшую точку 120 (см. фиг.1), например, ребро, пластину или выступ 902 (см. фиг.7), чтобы транспортное средство не могло перевернуться полностью, т.е., повернуться на 180°. Дополнительно, выступы, например ребра, пластины или выступы 904а, 904b (см. фиг.7), можно расположить на транспортном средстве поперечно, чтобы транспортное средство легче переворачивалось с боков и со спины в нормальное вертикальное положение. Таким образом, действующая обычно горизонтально сила Fh и действующая обычно вертикально сила Fv действуют не параллельно направлению силы тяжести в перевернутом транспортном средстве. Поэтому сила Fh или Fv может оказывать выпрямляющее действие на транспортное средство.
Как указано выше, расстояние между ногами или рядами ног должно быть как можно больше, чтобы в максимально возможной степени воспрепятствовать переворачиванию. В этом случае между двумя рядами ног расстояние может увеличиваться сверху вниз, как показано на фиг.2C и 2E, т.е. между точками подвески (или оснований) двух рядов ног расстояние меньше, чем между между концами ног. Наоборот, нужно создать пространство 404 (см. фиг.2E), чтобы ноги могли сгибаться внутрь. Такое пространство 404, преимущественно созданное между телом транспортного средства и ногами, может иметь форму V-образного углубления, т.е. тело транспортного средства скошено, как показано на фиг.2E, от вершины вниз. Это пространство 404 позволяет ногам отклоняться внутрь во время выпрямляющего переворачивания, чтобы добиться максимально плавного перехода из положения на боку в стабильное нормальное вертикальное положение.
Транспортное средство по настоящему изобретению должно двигаться так, чтобы максимально быть похожим на животное, в частности, на жука, насекомое, рептилию или другого мелкого животного.
Для того чтобы добиться максимального сходства движения транспортного средства с движением живого существа, такое транспортное средство должно иметь возможность бродить или странствовать по извилистой траектории, поскольку движение в единственном направлении не будет напоминать пользователю или третьему лицу движение живого существа.
Произвольности или случайности движения можно добиться, с одной стороны, меняя жесткость ног, материал ног и/или инерцию массы эксцентрика. Если увеличить жесткость ног, уменьшится величина подпрыгивания и уменьшится случайность движения. Наоборот, транспортное средство движется в случайных направлениях, когда жесткость ног, особенно передних ведущих ног по сравнению с задними ногами ниже. Хотя материал ног влияет на жесткость ног, подбор материала дает и другой эффект. Это объясняется тем, что материал ног можно выбрать таким, чтобы он притягивал грязь к концам ног, чтобы транспортное средство могло поворачиваться случайно или двигаться в другом направлении из-за изменившегося липкого трения с землей. Инерция массы эксцентрика также влияет на случайность траектории движения. Это происходит потому, что при большей инерции транспортное средство подпрыгивает с большей амплитудой, а это позволяет транспортному средству удариться в другое относительное положение.
Произвольность или случайность движения может быть достигнута, с одной стороны, за счет упругого носика 108 (см. фиг.1 и 5) транспортного средства. Это объясняется тем, что если транспортное средство сталкивается с другим объектом, оно отскакивает от него в случайном направлении. Таким образом, транспортное средство не пытается постоянно бороться с препятствием, а меняет направление движения из-за отскока и поэтому огибает препятствие. В этом случае не нужны никакие датчики: кажущееся разумным поведение достигается чисто механическими средствами.
Носик или передняя часть 108 транспортного средства может обладать свойствами упругости и может быть выполнена, в частности, из мягкого материала с низким коэффициентом трения. Здесь можно использовать резину с величиной твердости 65 единиц по твердомеру (или менее), чтобы получить гибкий носик, который можно сжимать относительно легко. Кроме того, носик или передняя часть 108 должна иметь конструкцию, сходящуюся в точку, чтобы носик было легче сжимать, что способствует отпружиниванию так, чтобы конец транспортного средства получал направленный вбок удар такой же силы, которая возможна для нового удара. Таким образом, транспортное средство можно отклонить в другом направлении благодаря форме носика.
Кроме того, свойства ног также играют роль во время удара о препятствие. Это объясняется тем, что если ноги имеют такую конструкцию, что транспортное средство при ударе немного поворачивается вокруг вертикальной оси, то обходное движение вокруг препятствия возникнет быстрее.
Наконец, скорость транспортного средства также важна для поведения при отклонении при ударе о препятствие. При более высокой скорости усиливается эффект отскока и вероятность того, что затем транспортное средство ударится под другим углом и обойдет препятствие, повышается.
На фиг.3A-3C показаны разные конфигурации ног. На всех чертежах движение вперед осуществляется направо (в плоскости чертежа).
На верхнем левом изображении на фиг.3A ноги соединены с распорками. Распорки используются для повышения жесткости ног, в то же время создавая впечатление длинных ног. Распорки могут быть расположены произвольно вдоль высоты ног. Различное расположение распорок, в частности, когда левые распорки расположены напротив правых, используется для изменения характеристик ног без необходимости менять длину ног. Таким образом, создается альтернативная возможность корректировки направления движения.
Изображение сверху справа на фиг.3A показывает вариант со множеством изогнутых ног. Следует обратить внимание, что средние ноги, т.е., все ноги кроме двух передних и двух задних, можно сконструировать так, чтобы они не контактировали с землей. За счет этого облегчается изготовление ног, поскольку средние ноги не участвуют в определении поведения при движении. Для определения поведения при движении можно учитывать только вес средних ног.
Нижние изображения (левое и правое) на фиг.3A показывают дополнительные прикрепленные элементы или выступы, которые придают транспортному средству схожесть с живым существом. Такие прикрепленные элементы или выступы совместно вибрируют, когда транспортное средство движется. Можно использовать регулировку этих прикрепленных элементов или выступов для генерирования требуемого поведения при движении или требуемого резонансного поведения и для генерирования повышенной случайности в поведении при движении.
Дополнительные конфигурации ног показаны на фиг.3B. Верхние изображения (слева и справа) показывают, что ноги могут соединяться с корпусом в других положениях по сравнению с вариантами, показанными на фиг.3A. В дополнение к разнице во внешнем виде, используется более высокая точка крепления ног, поэтому ноги имеют более длинную конструкцию без подъема центра тяжести тела (т.е. центра тяжести). В свою очередь более длинные ноги имеют уменьшенную жесткость, что может помимо создания других свойств привести к улучшению подпрыгивания. Нижнее изображение на фиг.3B показывает альтернативный вариант задних ног, где две ноги соединены друг с другом.
Дополнительные конфигурации ног показаны на фиг.3C. На верхнем левом изображении показан вариант с минимальным числом ног, а именно с одной задней ногой и двумя передними ногами. Размещение задней ноги либо слева, либо справа работает как руль и используется для управления направлением движения транспортного средства. Если используется задняя нога с нижним коэффициентом трения, то скорость транспортного средства увеличивается, как было описано выше.
На левом нижнем изображении на фиг.3C показан вариант с тремя ногами, где имеется одна передняя нога и две задние ноги. Управлять можно с помощью задних ног, расположив одну заднюю ногу впереди второй задней ноги.
Верхнее правое изображение на фиг.3C показывает транспортное средство с существенно модифицированными задними ногами, которые придают транспортному средству сходство с кузнечиком. Нижние стороны задних ног лежат на земле, поэтому коэффициент трения относительно земли также уменьшен. Поэтому на такое транспортное средство меньше оказывают влияние неровности и отверстия в земле и оно может легче скользить по неровностям или отверстиям в земле.
Нижнее правое изображение на фиг.3C показывает транспортное средство, в котором средние ноги подняты относительно передних и задних ног. Средние ноги, таким образом, играют эстетическую роль. Однако они также используются для влияния на поведение при переворачивании. Дополнительно, благодаря их весу можно также регулировать поведение при подпрыгивании.
На фиг.4A и 4B показано транспортное средство или игрушечный робот по другому варианту настоящего изобретения, где задние ноги можно регулировать по высоте независимо друг от друга. Задние ноги могут быть выполнены из жесткой и/или гибкой проволоки или из другого подходящего материала, например, пластика. Регулируемые задние ноги используются так, что пользователь может регулировать поведение при движении транспортного средства. В частности, можно регулировать направление движения, например, от поворота налево до движения по прямой и до поворота направо.
На фиг.7 показано транспортное средство или игрушечный робот по другому варианту изобретения, в котором имеются дополнительные ребра, пластины или выступы 902, 904а и 904b. Эти ребра, пластины или выступы могут быть расположены сверху 902 и по бокам 904а, 904b, чтобы влиять на поведение транспортного средства при переворачивании. В частности, эти ребра, пластины или выступы 902, 904а и 904b могут быть сконструированы так, чтобы их внешние точки находились рядом с виртуальным цилиндром или на нем. Таким образом транспортное средство может вращаться как цилиндр, когда оно лежит на спине или на боку. Таким образом транспортное средство может выпрямиться относительно быстро.
Реферат
Изобретение относится к транспортному средству с вибрационным приводом и множеством ног. Транспортное средство, в частности игрушечный робот, содержащее множество ног и вибрационный привод. Причем вибрационный привод имеет двигатель и дебаланс, при этом дебаланс расположен перед передними ногами. Ноги транспортного средства установлены сбоку от оси вращения вибрационного привода и над ней, при этом батарейка и двигатель расположены между ногами. Кроме того, ноги транспортного средства могут быть расположены в два ряда ног и сбоку от оси вращения вибрационного привода, при этом двигатель и батарейка расположены между ногами. Технический результат заключается в улучшении управляемости робота. 2 н.. и 36 з.п. ф-лы, 7 ил.
Формула
множество ног и вибрационный привод,
отличающееся тем, что вибрационный привод имеет двигатель и дебаланс, при этом дебаланс расположен перед передними ногами,
ноги установлены сбоку от оси вращения вибрационного привода и над ней, при этом батарейка и двигатель расположены между ногами.
множество ног и вибрационный привод, в котором вибрационный привод содержит двигатель и дебаланс,
отличающееся тем, что ноги расположены в два ряда ног и сбоку от оси вращения вибрационного привода, при этом двигатель и батарейка расположены между ногами.
Комментарии