Способ определения и коррекции отклонения фазы несущей в ходе приема радионавигационного сигнала - RU2584139C2
Код документа: RU2584139C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области спутниковой радионавигации, а именно спутниковой радионавигации типа GNSS (от английского «Global Navigation Satellite Systems» - глобальные системы спутниковой навигации), в особенности типов GPS (от английского «Global Positioning System» - система глобального позиционирования), Galileo, ГЛОНАСС (Глобальная навигационная спутниковая система).
Уровень техники
Спутниковая радионавигация позволяет определить положение приемника посредством способа, сходного с технологией триангуляции. Расстояния измеряют на основании сигналов, передаваемых спутниками.
Говоря более точно, приемник спутникового позиционирования позволяет, в частности, получать набор псевдоскоростей или интегрированных допплеровских смещений, каждое из которых представляет собой проекцию на ось, соединяющую приемник с каждым спутником, чтобы получить вектор относительной скорости приемника относительно указанного спутника.
Сигналы, передаваемые спутниками, формируют путем модуляции несущей сигнала посредством кода расширения. Таким образом, спутниковые сигналы обеспечивают возможность осуществления двух типов измерений для определения положения приемника. Кроме того, модуляция несущей посредством кода расширения приводит к расширению спектра в частотной полосе, что повышает устойчивость системы к помехам. Помимо этого, такой способ обеспечивает возможность различения спутников (путем использования для всех спутников разных кодов в случае системы GPS).
В измерениях первого типа используют код принятого сигнала. Измерения на основе кода, в отличие от измерений на основе несущей (см. ниже), не содержат неоднозначности, так как приемник может определить все число периодов кода между спутником и приемником. Однако измерения на основе кода обладают значительно меньшей точностью, чем измерения на основе несущей.
Измерения второго типа производят на основе несущей принятого сигнала. Измерения на основе несущей обладают высокой точностью, но содержат неоднозначность. Действительно, приемник может определить лишь фазу несущей, в результате чего число периодов волн между спутником и приемником остается неизвестным. В результате возникает неоднозначность, которую необходимо устранить.
Для осуществления измерений таких двух типов приемник получает и отслеживает принятый сигнал. Для этого он формирует копии кода и несущей, так называемые локальные копии, в отношении которых он проводит корреляцию с принятым сигналом. Поскольку код и несущая представляют собой несогласованные наборы данных, формирование копий кода и несущей осуществляют при помощи двух раздельных контуров.
Контур несущей, как правило, представляет собой контур фазовой автоподстройки частоты (ФАПЧ или по-английски Phase-Locked Loop, PLL). Контур кода, как правило, содержит средства двойной корреляции, позволяющие определить расхождение между локальным кодом и принятым кодом, соответствующее разности измеряемых значений энергии.
Приемник использует эти два контура для получения точных и не содержащих неоднозначности измерений.
На первой стадии, называемой стадией получения, приемник работает в режиме открытого контура, исследуя принятый сигнал путем проверки различных гипотез о местоположении и скорости по локальному коду и локальной несущей. Каждый следящий контур замыкают, когда неопределенность на его входе (местоположения для кода и частоты для несущей) становится в области применения ниже дискриминанта данного контура.
Таким образом, на стадии отслеживания принятого сигнала два контура дополняют друг друга: контур несущей обеспечивает высокую точность, а контур кода обеспечивает надежность.
Тем не менее, прохождение волн, поступающих от спутников, через ионосферу является источником ошибок отслеживания в контуре несущей.
Такие неточности приводят к скачкам циклов в контуре несущей и, следовательно, к ошибкам измерений, при этом необязательно вызывают десинхронизацию контура несущей, в результате чего синхронизация контура несущей не происходит, следовательно, навигационное решение содержит ошибку.
Раскрытие изобретения
Задача, на решение которой направлено изобретение, состоит в устранении указанных недостатков.
Для решения поставленной задачи в соответствии с первым аспектом изобретения предлагается способ отслеживания фазы несущей сигнала, принятого носителем от спутника, при помощи контура отслеживания фазы несущей, причем указанный сигнал получен навигационной системой носителя, содержащей приемник определения местоположения посредством радионавигации и автономный модуль, причем приемник выполнен с возможностью получения и отслеживания фазы несущей сигнала, поступающего от спутника.
Способ включает в себя этапы, на которых:
- определяют ошибку слежения контура фазы несущей, причем указанную ошибку слежения определяют между двумя моментами выборки, и указанная ошибка соответствует первому фазовому отклонению;
- определяют изменение ускорения носителя между двумя моментами выборки при помощи автономного модуля;
- проецируют изменение ускорения на ось видимости между спутником и носителем для получения второго фазового отклонения;
- сравнивают первое и второе отклонения для определения ошибки измерения фазы несущей, отслеживаемой указанным контуром фазы несущей.
Способ по изобретению может дополнительно содержать некоторые из следующих аспектов:
- изменение ускорения носителя определяют при помощи цифровой модели, осуществленной в модуле навигационной системы;
- изменение ускорения носителя определяют при помощи инерциального блока навигационной системы;
- сравнение состоит в определении несогласованности первого отклонения со вторым отклонением;
- несогласованность интегрируют по скользящему периоду, длительность которого составляет порядка от одной до пяти констант времени фильтра контура фазы несущей, а затем сравнивают с пороговым значением, обычно равным λ/4, причем способ включает в себя этап, на котором на основе фазового отклонения {δγn·δt2}проекц, сформированного автономным модулем, формируют сигнал-копию принятого сигнала;
- способ включает в себя этап, на котором на основе интегрированных допплеровских смещений, полученных из сформированного сигнала-копии, определяют навигационное решение;
- в случае превышения несогласованностью порогового значения, обычно составляющего порядка λ/4, способ включает в себя этап, на котором корректируют интегрированные допплеровские смещения, необходимые для навигационного решения, причем коррекция состоит в прибавлении к указанным интегрированным допплеровским смещениям члена k·λ/2, где k - целое число, такое, чтобы абсолютное значение интегрированной несогласованности было меньше порогового значения, причем пороговое значение обычно составляет порядка λ/4;
- способ включает в себя этап, на котором на основе скорректированных интегрированных допплеровских смещений определяют навигационное решение;
- сравнение состоит в вычислении члена несогласованности, определенного формулой: , где {δφn}восст - первое фазовое отклонение, {δγn·δt2)проекц - величина, однородная расстоянию, соответствующему второму фазовому отклонению, а λ - длина волны, соответствующая частоте несущей принятого сигнала.
В соответствии со вторым аспектом изобретения предлагается навигационная система, содержащая средства для осуществления способа по первому аспекту изобретения.
Краткое описание чертежей
Другие особенности и преимущества изобретения станут ясны из нижеследующего описания, приведенного исключительно в иллюстративных целях и не накладывающего каких-либо ограничений, которое содержит ссылки на прилагаемые чертежи.
На чертежах:
- фиг. 1 схематически иллюстрирует навигационную систему по изобретению;
- фиг. 2 схематически иллюстрирует этапы способа по изобретению;
- фиг. 3 подробно иллюстрирует навигационную систему по изобретению.
Осуществление изобретения
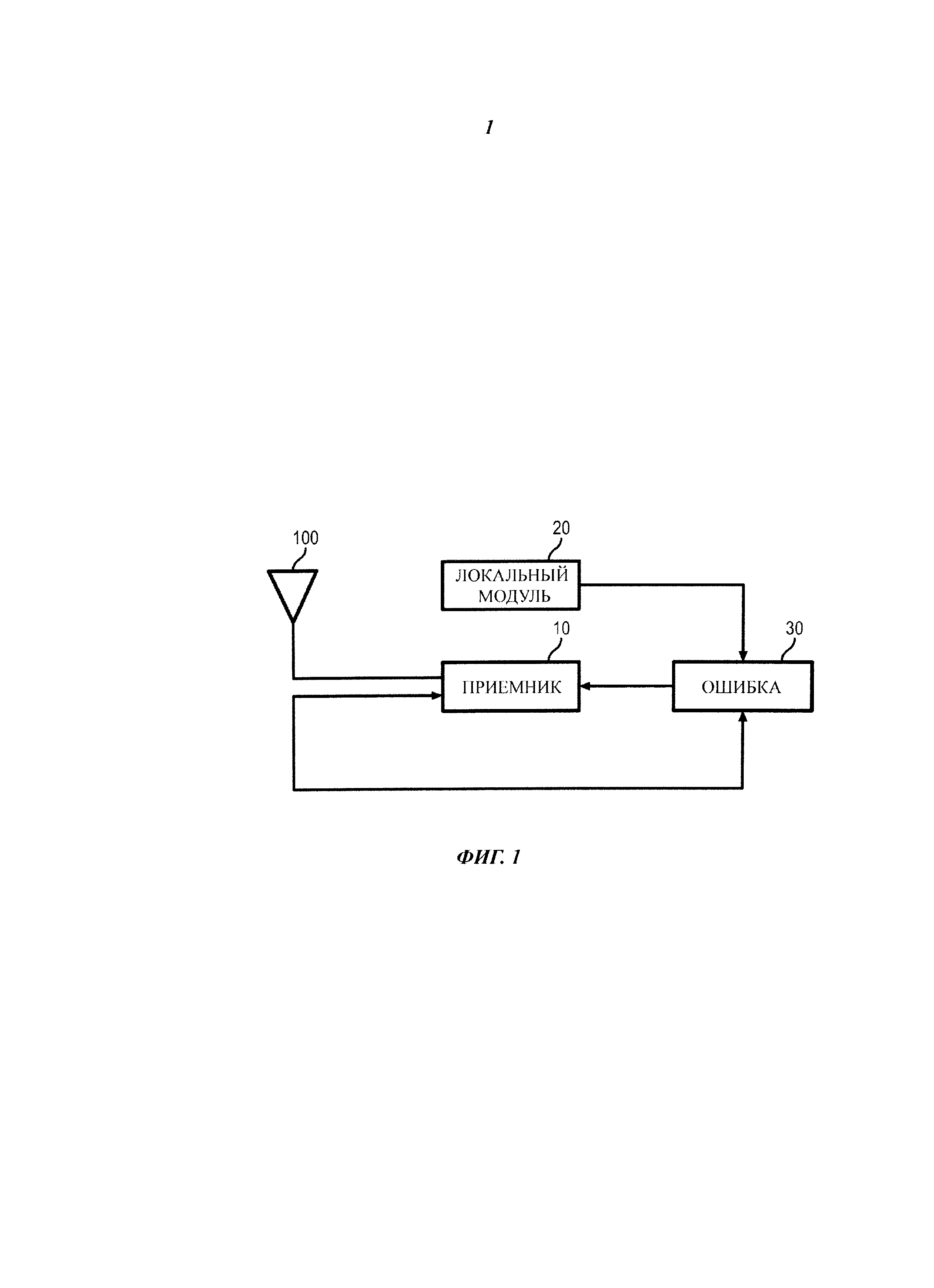
На фиг. 1 представлена навигационная система, установленная на носителе, чаще всего представляющем собой воздушное судно, местоположение которого необходимо определить.
Такая навигационная система содержит приемник 10 определения местоположения посредством радионавигации, предпочтительно представляющий собой приемник GPS или GNSS. Приемник может быть многоканальным приемником; в таком случае каждый канал соответствует одному спутнику, передающему сигналы, принимаемые приемником 10.
Приемник 10 содержит приемную антенну 100, выполненную с возможностью приема сигнала, поступающего от одного или нескольких спутников (не представлены).
Рассмотрим случай, в котором сигнал, принятый навигационной системой, представляет собой сигнал GPS.
В соответствии с известными технологиями радионавигационные сигналы, передаваемые спутниками, представлены в виде несущей, модулированной волной с расширенным спектром, которая содержит двоичный псевдослучайный бинарный код. Поскольку модуляция несущей вызывает расширение спектра относительно частоты несущей, радионавигационные сигналы имеют расширенный спектр.
Псевдослучайные коды представляют собой идентификатор сигнала и, следовательно, передающего спутника.
Кроме того, некоторые сигналы спутникового позиционирования могут также быть использованы для передачи полезных данных (например, навигационного сообщения) в форме двоичной последовательности (со значительно меньшей скоростью в сравнении с псевдослучайным кодом), которая модулирует сигнал, образованный несущей, модулированной кодом.
В случае системы GPS радионавигационные сигналы передаются в частотных полосах L1 с центральной частотой 1575,42 МГц и L2 с центральной частотой 1227,6 МГц.
Кроме того, навигационная система по фиг. 1 содержит автономный модуль 20 и модуль 30 определения и коррекции возможных ошибок слежения. Следует отметить, что автономный модуль 20 не принимает каких-либо сигналов, поступающих от одного или более спутников, и потому может быть назван автономным. Измерениям, которые он предоставляет, в дальнейшем описании придано определение «автономные», которое отличает их от прочих.
В соответствии с известными технологиями приемник 10 может работать в режиме получения или отслеживания.
В данном случае будем считать, что приемник работает в режиме отслеживания, т.е. обеспечивает возможность предоставления навигационного решения на основе набора псевдорасстояний и псевдоскоростей или интегрированных допплеровских смещений, которые позволяют определить местоположение носителя.
Навигационное решение для носителя определяют именно на основе этих измерений.
В частности, осуществляют решение набора уравнений, полученных на основе таких псевдоизмерений. Данные процедуры хорошо известны специалистам в данной области, а потому не будут более подробно рассмотрены в последующем описании.
Говоря точнее, прием радионавигационного сигнала включает в себя первую демодуляцию с использованием внутренней копии фазы несущей, сформированной в приемнике осциллятором, приводимым контуром отслеживания фазы несущей, и вторую демодуляцию с использованием внутренней копии формы кода расширения, сформированной контуром отслеживания кода.
Приемник использует сигналы слежения контуров отслеживания фазы несущей и кода для определения псевдоизмерений, позволяющих получить навигационное решение.
Как уже было указано выше, навигационная система содержит модуль 30 определения и коррекции ошибок слежения.
Такой модуль 30 обеспечивает возможность осуществления способа контроля контура отслеживания фазы несущей сигнала, принятого от спутника. Разумеется, в случае многоканального приемника такой способ используют для каждого из каналов.
Цель применения данного способа состоит в выявлении одного или нескольких скачков циклов фазы несущей и их коррекции.
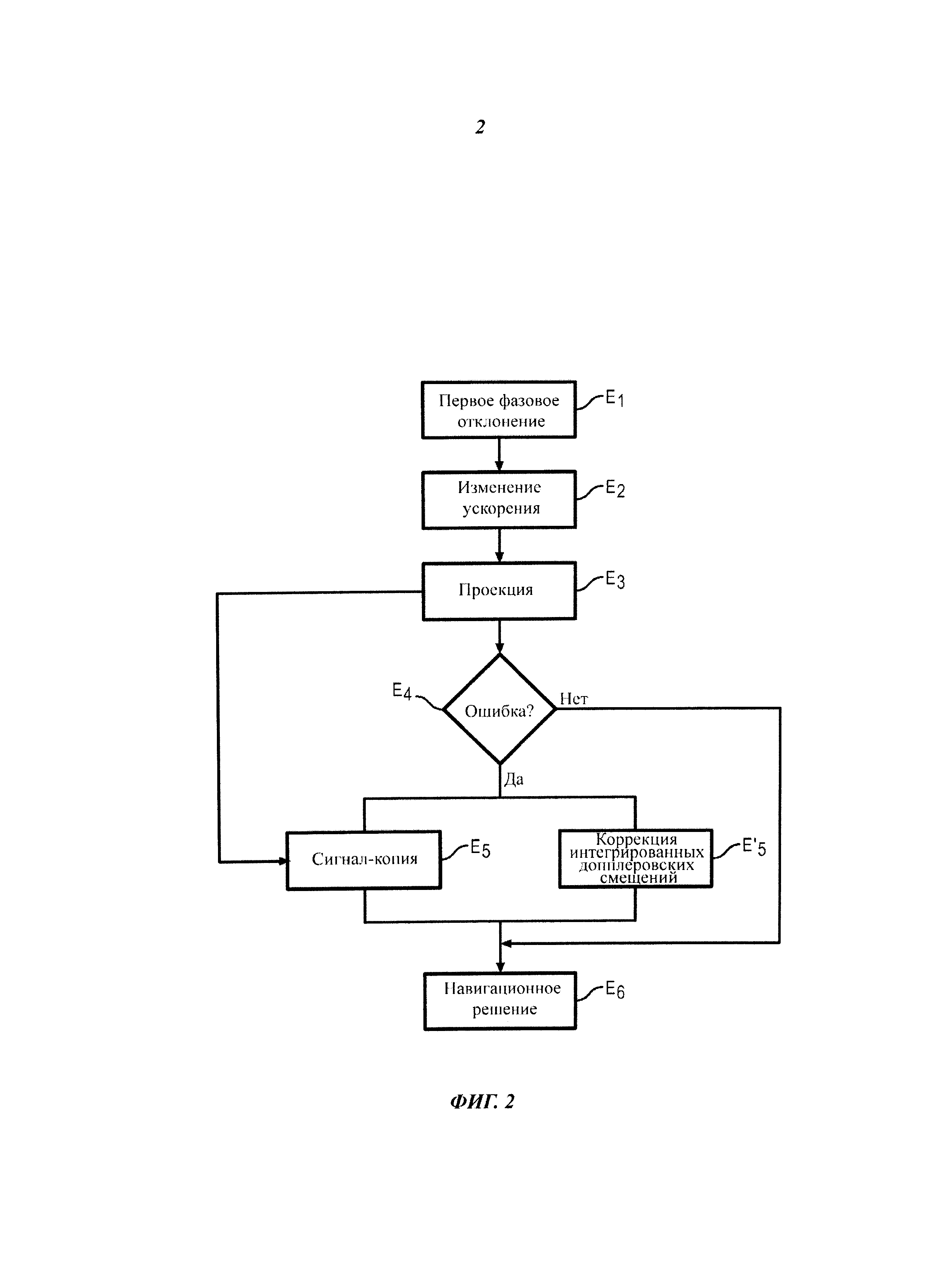
Этапы данного способа схематически представлены на фиг. 2.
На первом этапе E1 определяют ошибку слежения контура фазы несущей между двумя моментами времени. Такая ошибка слежения представляет собой первое фазовое отклонение. Данное фазовое отклонение обеспечивает возможность коррекции контура сопровождения фазы несущей.
Первое фазовое отклонение определяют между последовательными выборками, измеряемыми на выходе контура фазы несущей. Такое фазовое отклонение равно δφn=φn-φn-1, гдеn - индекс, соответствующий моменту вычисления.
На втором этапе Е2 (который на практике может быть осуществлен до вышеописанного первого этапа Е1 или одновременно с ним) определяют изменение ускорения носителя между теми же двумя моментами.
Определение такого изменения ускорения производит автономный модуль 20 навигационной системы.
В соответствии с одним из вариантов осуществления изобретения автономный модуль 20 может содержать инерциальную цифровую модель, которая позволяет определять изменения ускорения носителя относительно спутника.
С учетом того, что движение спутника (в данном случае носителя) в основном подчинено законам Кеплера, положение спутника определяют по кеплеровым элементам орбиты. Скорость спутника определяют путем дифференцирования (предпочтительно точной формулы) или дифференцирования положения. Ускорение получают путем дифференцирования скорости.
В соответствии с другим вариантом осуществления изобретения автономный модуль 20 представляет собой инерциальный блок.
В соответствии с известными технологиями инерциальный блок в основном состоит из двух групп датчиков, каждая из которых содержит по три датчика. Датчики одной из групп представляют собой гирометры (для измерения вращения), а датчики другой группы - акселерометры (для измерения ускорения). Три датчика каждой из групп ориентированы так, чтобы регистрировать перемещения в пространстве (в трех измерениях). Интегрирование измерений ускорения дает скорость по оси каждого из акселерометров, а интегрирование скоростей дает положение каждого из акселерометров в направлении по его оси. Для осуществления интегрирования необходимо определить начальные константы, для чего используют инерциальное выравнивание.
Поскольку перемещение подвижного объекта может быть произвольным, ориентация осей акселерометров изменяется; в связи с этим необходимо спроектировать измерения ускорения в опорной системе координат; задачей гирометров является определение вращения осей измерения акселерометров.
Таким образом, на третьем этапе Е3 изменение ускорения проецируют на ось видимости спутник - приемник так, чтобы получить относительное измерение, причем такая проекция изменения ускорения представляет собой второе фазовое отклонение.
Проекция изменения ускорения однородна с расстоянием в метрах (м), а поскольку длина волны эквивалентна 2π радианам, от проекции изменения ускорения можно легко перейти к отклонению фазы несущей.
Затем, на четвертом этапе Е4, производят сравнение первого и второго отклонений с целью выявления возможной ошибки фазы несущей, отслеживаемой контуром фазы несущей.
В частности, речь идет об определении того, является ли фазовое отклонение, обеспечивающее возможность управления контуром фазы несущей, результатом ошибки или несогласованности или же оно вызвано скачком цикла.
Наконец, на пятом этапе Е5 на основе фазового отклонения, измеренного контуром несущей и, возможно, скорректированного с использованием проекции изменения ускорения, сформированной по результатам измерений автономного модуля 20, определяют навигационное решение.
Радионавигационное решение формируют на основе псевдоизмерений, например, методом наименьших квадратов и с использованием фазового отклонения.
Сравнение, производимое на этапе Е4, состоит, в частности, в определении несогласованности первого отклонения со вторым отклонением.
Если выявленная несогласованность превышает пороговое значение, может быть выдан предупредительный сигнал о несогласованности, после чего первое фазовое отклонение заменяют на второе, и навигационное решение определяют на этапе Е6 на основе скорректированного слежения.
В альтернативном случае навигационное решение определяют на этапе Е6 на основе скорректированных псевдоизмерений.
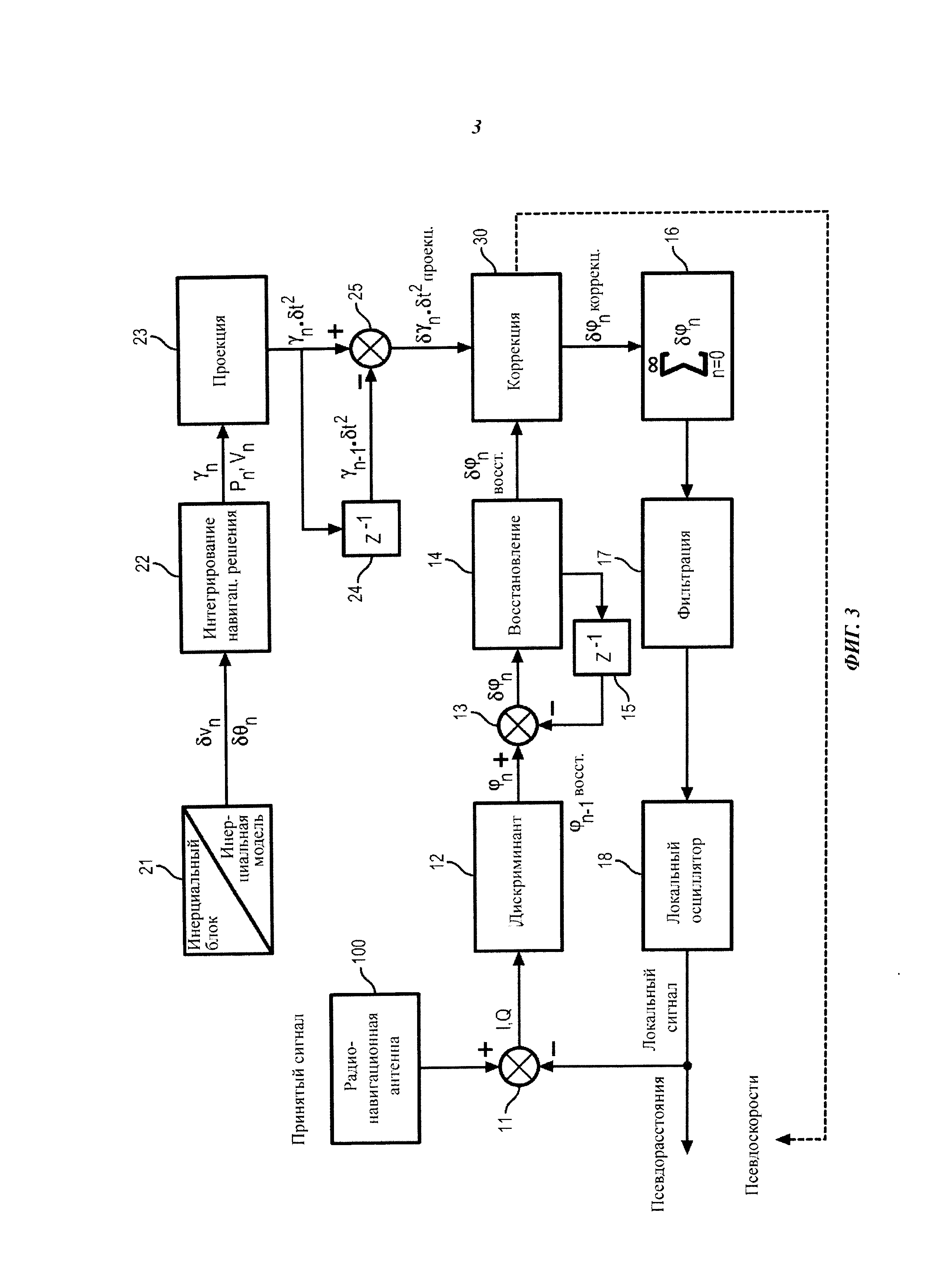
На фиг. 3 приведена подробная схема навигационной системы.
Как и в схеме по фиг. 1, прием сигнала типа GPS производит радионавигационная антенна 100.
В антенне 100 производят предварительное усиление сигнала, затем его фильтрацию, снижение частоты и, наконец, аналого-цифровое преобразование для обеспечения возможности цифровой обработки сигнала.
В соответствии с известными технологиями в режиме отслеживания контур фазы несущей отслеживает фазу несущей принятого сигнала. Задание контура фазы несущей осуществляет локальный осциллятор 18, который позволяет корректировать фазовое отклонение между локальной копией и принятым сигналом в ходе отслеживания фазы несущей. Навигационное решение вычисляют на основе локального сигнала, который должен представлять собой, по существу, почти точную копию принятого сигнала.
Формирование локального сигнала-копии происходит в локальном осцилляторе 18. В соответствии с известными технологиями такой сигнал-копия образован несущей (синусоидой), модулированной псевдослучайным двоичным кодом; его дискретизируют с частотой порядка от нескольких мегагерц до нескольких десятков мегагерц. Частота копии несущей равна частоте передачи несущей спутником (в случае GPS L1 - 1,57542 ГГц), уменьшенной на понижение частоты в приемнике и увеличенной на относительное допплеровское смещение между спутником и носителем. Задача контура слежения за фазой несущей и состоит именно в определении такого относительного допплеровского смещения. Частота копии кода равна частоте передачи кода спутником (в случае кода GPS С/А - 1,023 МГц), увеличенной на приведение кода несущей (т.е. допплеровское смещение, оцениваемое контуром несущей) и на несогласованность между кодом и несущей, в определении которой состоит задача контура слежения за кодом.
По принятому сигналу и локальному сигналу, сформированному локальным осциллятором 18, определяют инфазный канал I и квадратурный канал Q корреляционного произведения двух сигналов; эти каналы используют в дальнейшем.
А именно канал I получают интегрированием произведения принятого сигнала на локальный сигнал, причем такое интегрирование производят на частоте порядка от нескольких мегагерц до нескольких десятков мегагерц (аналогично частоте дискретизации локального осциллятора 18) на промежутке длительностью 1 мс или равной периоду кода С/А, причем канал I подают на выход, после чего обнуляют.
Канал Q определяют аналогично каналу I, но локальный сигнал при этом берут с опережением по фазе несущей на π/2 по сравнению с локальным сигналом, используемым для вычисления канала I.
По таким двум каналам I, Q определяют (12) дискриминант контура несущей. Дискриминант получают вычислением . По полученному дискриминанту определяют значение фазы φn несущей.
Поскольку принятый сигнал содержит навигационные данные, кодирующие информацию, фазу несущей восстанавливают 13, 14, 15, чтобы извлечь эти данные.
А именно определяют 13, 15 фазовое отклонение между двумя моментами вычисления (или двумя выборками): δφn=φn-φn-1.
Это фазовое отклонение δφn позволяет затем получить (шаг 14) восстановленное фазовое отклонение {δφn}восcт.
В частности, если δφn>π/2, то δφn уменьшают на π, а если δφn<-π/2, то δφn увеличивают на π.
Таким образом, для определения наличия неоднозначности фазы несущей используют именно фазовое отклонение δφn.
Фазовое отклонение {δφn}восст интегрируют 16 по всему периоду слежения, затем фильтруют 17 при помощи контура третьего порядка, а затем передают на вход локального усилителя 18 для формирования сигнала-копии принятого сигнала.
До этого модулю 30 определения и коррекции ошибок может быть необходимо произвести коррекцию ошибки.
Для этого модуль 30 получает, с одной стороны, фазовое отклонение {δφn}восст, поступающее от контура фазы несущей (динамику, измеренную контуром фазы несущей), а с другой стороны, автономную динамику, которая представляет собой проекцию изменения ускорения на ось видимости между спутником и носителем.
Изменение ускорения, определенное автономным модулем 20, получают либо из инерциальной модели либо от инерциального модуля 23.
Такое изменение ускорения получают путем определения автономной динамики, обработанной модулем 22 интегрирования навигационного решения с целью получения автономных измерений, и, следовательно, абсолютных измерений ускорения γn, положения Рn и скорости vn.
Проекцию ускорения на ось видимости между спутником и носителем формирует модуль 23 проекции.
По этой проекции получают, таким образом, автономное значение проекции изменения ускорения на ось видимости {δγn>δt2}проекц.
Изменение ускорения определяют на том же промежутке времени вычислений, который используют для определения изменения фазы в контуре фазы несущей.
Для определения наличия возможной ошибки модуль 30 коррекции определяет член несогласованности, определенный следующим образом: , где {δφn}восст - первое фазовое отклонение, {δγn·δt2}проекц - величина, однородная расстоянию, соответствующему проекции второго фазового отклонения, а λ - длина волны, соответствующая частоте несущей принятого сигнала.
Если приведенный выше член превышает пороговое значение, то измерение фазы несущей {δφn }восcт содержит ошибку.
В таком случае существуют два решения, позволяющие устранить такую ошибку.
Первое решение состоит в использовании для формирования сигнала-копии на этапе Е5 фазового отклонения {δγn·δt2}проекц, полученного автономным модулем 20. В таком случае пороговое значение имеет величину порядка на λ/4, где является функцией отношения сигнала к шуму.
Именно этот сигнал-копию используют в дальнейшем для измерения псевдоскоростей или интегрированных допплеровских смещений, необходимых для вычисления навигационного решения.
Второе решение состоит в корректировке интегрированных допплеровских смещений на этапе Е5′ путем прибавления к ним члена k·λ/2, где k - целое число, подобранное так, чтобы выполнялось неравенство: |несогласованность|интегр<порог. В частности, несогласованность интегрируют по скользящему периоду, длительность которого составляет порядка от 1 до 5 констант фильтра контура слежения за несущей. Пороговое значение составляет порядка λ/4.
Первое решение применимо лишь в том случае, если в момент вычисления фильтрации 17 имеется оценка 25 {δγn·δt2}проекц.
Второе решение применимо всегда, но становится единственно возможным в случаях, когда неприменимо первое решение. В таком случае значение фазового отклонения {δφn}восст несущей должно быть сохранено в памяти для того, чтобы вычисления члена несогласованности относились к синхронизованным (т.е. полученным в один и тот же временной промежуток) измерениям - автономным и радионавигационным.
Реферат
Изобретение относится к радиотехнике и может использоваться для определения местоположения. Технический результат состоит в повышении точности отслеживания фазы носителя. Для этого отслеживают фазу несущего сигнала, принятого носителем от спутника, при помощи контура отслеживания фазы несущей, причем указанный сигнал получают посредством навигационной системы носителя, содержащей приемник определения местоположения посредством радионавигации и автономный модуль, причем приемник выполнен с возможностью приема и отслеживания фазы несущей сигнала, поступающего от спутника. 2 н. и 7 з.п. ф-лы, 3 ил.
Формула
- определяют (Е1) ошибку слежения контура фазы несущей, причем указанную ошибку слежения определяют между двумя моментами выборки, и указанная ошибка соответствует первому фазовому отклонению;
- определяют (Е2) изменение ускорения носителя между двумя моментами выборки при помощи автономного модуля (20);
- проецируют (Е3) изменение ускорения на ось видимости между спутником и носителем для получения второго фазового отклонения;
- сравнивают (Е4) первое и второе отклонения для определения ошибки измерения фазы несущей, отслеживаемой указанным контуром фазы несущей, причем указанное сравнение состоит в определении несогласованности первого отклонения со вторым отклонением.
Комментарии