Устройство для пространственного перемещения субъектов - RU2599858C2
Код документа: RU2599858C2
Чертежи



Описание
Изобретение относится к устройству для пространственного перемещения субъектов, содержащему первый опорный элемент, который содержит удерживающее устройство для по меньшей мере одного субъекта и расположен с возможностью вращения вокруг первой оси вращения относительно второго опорного элемента; второй опорный элемент, который расположен с возможностью вращения вокруг второй оси вращения относительно третьего опорного элемента, причем первая ось вращения и вторая ось вращения расположены, по существу, ортогонально друг к другу; и поверхность для воспроизведения изображений.
Устройство используется, в числе прочего, для имитации движущихся систем, таких как, например, транспортные средства, корабли, самолеты и прочее. Для людей, расположенных в полом корпусе или кабине, имитируется виртуальная реальность, посредством множества искусственно сформированных сенсорных восприятий. Эти сенсорные стимулы, с одной стороны, являются аудиовизуальными стимулами, которые подают пользователю с помощью системы воспроизведения изображений и системы воспроизведения звука. С другой стороны, ускорения или силы, которые действуют на пользователя, формируются основным устройством. Человеческий мозг интерпретирует виртуальное состояние движения с помощью сочетания аудиовизуальной и физического сенсорного ощущения. Более конкретно сенсорное восприятие соответствует действительному сенсорному восприятию таких ситуаций, и эта интерпретация становится для пользователя более реалистичной. По этой причине очень важно подавать эти сигналы пользователю способом, близким к реальности, насколько это возможно.
Кроме того, в представленном устройстве предусмотрены блоки ввода параметров, посредством которых пользователь может управлять движениями движущейся системы в виртуальном мире.
Этот управляющий сигнал от пользователя и любого окружающего воздействия (ветер, дорожное полотно, и т.д.), который также может относиться к переменным возмущения, вводится в физическую имитационную модель. Это относится к математическому отображению реальных характеристик объекта имитации. Это содержит переменные, такие как механическая инерция, сопротивление и т.д. Ускорение или силы и их ориентация, которая направлены на то, чтобы быть поданными пользователю в виртуальном мире, вычислены с помощью этой модели. Это происходит посредством управления различными приводами с помощь блока управления.
Устройство для пространственного движения субъекта, в частности имитации движения тренажера ориентации известны долгое время.
Устройствами в соответствии с уровнем техники являются, например, одноплечевые центрифуги с кабиной на шарнирной подвеске. С такими устройствами кабина, выполненная с возможностью вращения вокруг двух вращательных степеней свободы, обеспечена на внешнем конце расположенного с возможностью вращения плеча. С помощью вращения кабины на определенном нормальном расстоянии от оси вращения кабина и субъект, расположенный в ней, испытывает центробежное ускорение и тангенциальное ускорение, в дополнение к гравитационному ускорению. Результирующее направление ускорения и вариации в величине ускорения вследствие различных угловых скоростей могут быть использованы посредством целевого вращения кабины, чтобы имитировать определенное движение и состояние ускорения для субъекта. Эти две оси вращения кабины имеют две общие точки пересечения, которые обычно лежат в области головы субъекта.
Дополнительное возможное приложение - это обеспечение кабины на шарнирной подвеске в двуплечевых центрифугах, в частности двуплечевые центрифуги с проходящей подъемной тележкой. Эту подъемную тележку проводят вдоль плеча и также она содержит подъемный поступательный привод, который делает возможным движение кабины параллельным с основной осью вращения основного плеча.
Кроме того, известны симуляторы, которые содержат кабину, расположенную вертикально на гексаподе. Отдельно от гравитационного ускорения последнее не имеет дополнительных значений для статического или перманентного возрастания или убывания в результирующем ускорении субъекта. Состояние движения может также быть имитировано посредством наклона и поворота кабины, но упомянутое состояние движения преимущественно имитирует статические ситуации полета или управление машиной.
Кроме того, в различных симуляторах использованы различные шарнирные подвески.
Задача настоящего изобретения состоит в преодолении недостатков уровня техники и
создании устройства для пространственного перемещения субъекта, настолько компактного, насколько возможно, причем, в частности, узел опорных элементов для вращения субъекта вокруг по меньшей мере двух вращательных степеней свободы является настолько миниатюрным и компактным, насколько возможно, в результате чего устройство может быть предпочтительно выполнено более компактным и рентабельным, и при этом, кроме того, обеспечена улучшенная имитация для субъекта, в частности более реалистичная имитация с более впечатляющим воздействием на более компактном пространстве.
Задачи изобретения решаются посредством того, что удерживающее устройство имеет по меньшей мере одну вращательную степень свободы относительно поверхности для воспроизведения изображений
Кроме того, задачи изобретения решаются посредством того, что третий опорный элемент расположен с возможностью вращения вокруг третьей оси вращения относительно устройства перемещения, причем вторая ось вращения и третья ось вращения расположены, по существу, ортогонально друг к другу, или того, что третий опорный элемент жестко присоединен к устройству перемещения.
Дополнительными признаками изобретения являются, например, такие: поверхность для воспроизведения изображений обеспечена на втором элементе опоры и связана с последним, опорный элемент и устройство для движения в каждом произвольном положении во время вращения расположены вне поля зрения субъекта, оси вращения проходят, по существу, через центр, и/или тело субъекта, в частности, голова является центром тяжести тела, и сердце субъекта расположено в области центра.
Кроме того, признаками изобретения может быть то, что поверхность для воспроизведения изображения, по существу, повторяет внутреннюю сторону полого корпуса и изогнута вокруг удерживающего устройства так, чтобы образовать вогнутую поверхность; полый корпус и/или поверхность для воспроизведения изображения имеют, по существу, замкнутую форму, в частности могут являться как полой сферой, так и полым эллипсоидом, сегментированной полой сферой, сегментированным полым корпусом, сформированными в виде полого корпус или полой сферы, так что полый корпус содержит проем для входа и выхода субъектов, так что проем является закрываемым проемом, причем затвор предпочтительно выполняется так, чтобы завершить форму корпуса.
Изобретение также отличается тем, что устройство движения является одноплечевой центрифугой, такой как центрифуга с подъемной тележкой, центрифуга с проходящей подъемной тележкой, линейной проходящей тележкой; двуплечевая центрифуга с тележкой, проходящей в обе стороны, двуплечевая центрифуга со съемной тележкой, проходящей в обе стороны, или роботизированной рукой с по меньшей мере одной вращательной и/или одной поступательной степенью свободы, такой как гексапод или неподвижная опора, так что по меньшей мере один блок управления и по меньшей мере один привод обеспечены для вращения элементов опоры вокруг соответствующих осей вращения и для приведения в действие устройства движения, и так что по меньшей мере один привод с возможностью управления посредством блока управления, так что первый привод обеспечен для приведения в действие первого опорного элемента вокруг первой оси вращения, второй привод обеспечен для приведения в действие второго опорного элемента вокруг второй оси вращения; и при необходимости, третий привод обеспечен для приведения в действие третьего опорного элемента вокруг третьей оси вращения и/или таким образом, что по меньшей мере один параметр блока ввода обеспечен так, что субъект может воздействовать на блок управления, в частности управление движением опорных элементов и устройства движения.
Дополнительное решение задачи в соответствии с изобретением является таким, что поверхность для воспроизведения изображений служит в качестве поверхности для воспроизведения изображений, отображающей изображение одного или более проекторов, или в качестве плоской поверхности отображения, такой как, например, поверхность OLED-экрана, поверхность плазменного экрана или поверхность LCD-экрана, так что первый опорный элемент и/или удерживающее устройство имеет вращательную степень свободы по отношению к устройству воспроизведения изображений, так что устройство воспроизведения изображений имеет по меньшей мере одну степень свободы по отношению к устройству движения, так что поверхность воспроизведения изображения и полый корпус неподвижно присоединены ко второму элементу опоры и/или так что удерживающее устройство имеет по меньшей мере одну степень свободы по отношению к первому элементу опоры.
Кроме того, устройство отличается тем, что поверхность для воспроизведения изображения неподвижно присоединена к полому корпусу или что внутренняя сторона полого корпуса является поверхностью для воспроизведения изображения, что первый опорный элемент расположен дугообразно выходящим из поля зрения субъекта, что второй опорный элемент является кольцеобразным, близким к форме полого корпуса или частично близким к форме полого корпуса, причем первый опорный элемент расположен с возможностью вращения вокруг первой оси вращения ко второму элементу опоры в по меньшей мере одной точке, предпочтительно в двух точках, что третий элемент поры является кольцеобразным, близким к форме полого корпуса или частично близким к форме полого корпуса, причем второй опорный элемент расположен с возможностью вращения вокруг второй оси вращения относительно третьего опорного элемента в по меньшей мере одной точке, предпочтительно в двух точках, и/или так что третий опорный элемент расположен с возможностью вращения вокруг третьей оси вращения относительно устройства движения в по меньшей мере одной точке, предпочтительно в двух точках.
Дополнительное решение задачи в соответствии с изобретением такое, что оси вращения, по существу, пересекаются в точке, или такое, что по меньшей мере одна из осей вращения имеет нормальное расстояние от других осей вращения, что нормальное расстояние соответствует минимальному расстоянию между глазом и/или органом равновесия субъекта, что продольная ось и основная ось вращения имеют, по существу, одну точку пересечения для имитирования равномерного, неускоренного движения, стационарного положения или квазистатического движения.
Кроме того, изобретение отличается тем, что для того чтобы имитировать однородное, неускоренное движение, стационарное положение или квазистатическое движение, первая ось вращения соответствует вертикальной оси, вторая ось вращения соответствует поперечной оси и третья ось вращения соответствует продольной оси, тем, что первая ось вращения соответствует поперечной оси, вторая ось вращения соответствует продольной оси и что вращение вокруг третьей оси (6) вращения заблокировано, что первая ось вращения соответствует поперечной оси, вторая ось вращения соответствует вертикальной оси и третья ось вращения соответствует продольной оси, что первая ось вращения соответствует вертикальной оси, вторая ось вращения соответствует продольной оси и третья ось вращения соответствует поперечной оси, что первая ось вращения соответствует поперечной оси, вторая ось вращения соответствует продольной оси и третья ось вращения соответствует вертикальной оси, вторая ось вращения соответствует поперечной оси и третья ось вращения соответствует вертикальной оси.
Для начала будут определены некоторые обозначения, чтобы улучшить понимание:
Поле зрения определено как область, которая может быть визуально воспринята с устойчивого и прямого положения головы и неподвижного пристального взгляда прямо вперед. Более того, поле зрения определено как бинокулярное поле зрения, т.е. поле зрения обоими глазами. Расширение в поперечном направлении поля зрения лежит около 180°, расширение в вверх направлении около 60° и расширение вниз около 70°.
Поле зрения определено как область, которой соответствует поле зрение, ограниченное близостью непрозрачного корпуса или непрозрачных слоев. В случае данного изобретения поле зрение может быть ограничено поверхностью для воспроизведения изображений, деталями кабины и элементами экипировки, такими как шлем.
Поле зрения - это целая область, которая может быть увидена субъектом, учитывая повороты и движения головой.
Продольная ось определена как ось, которая идет вдоль или параллельно направлению взгляда в случае, когда голову удерживают в прямом положении, и неподвижному взгляду, направленному прямо вперед.
Поперечная ось определена как ось, которая идет нормально к продольной оси и, по существу, представляет собой линию, соединяющую два глаза или два уха субъекта.
Вертикальная ось определена как ось, которая идет нормально к двум указанным выше осям и, таким образом, по существу, соответствует вертикальной оси тела в основном направлении вытяжения позвоночника субъекта.
Две вращательные оси ортогональны, когда их направляющие векторы ортогональны. Точка пересечения в трехмерном пространстве для этого не является необходимой. Две оси, таким образом, могут быть ортогональными, когда они сдвинуты относительно друг друга.
Данное изобретение подробно описано ниже с помощью нескольких примеров и вариантов осуществления.
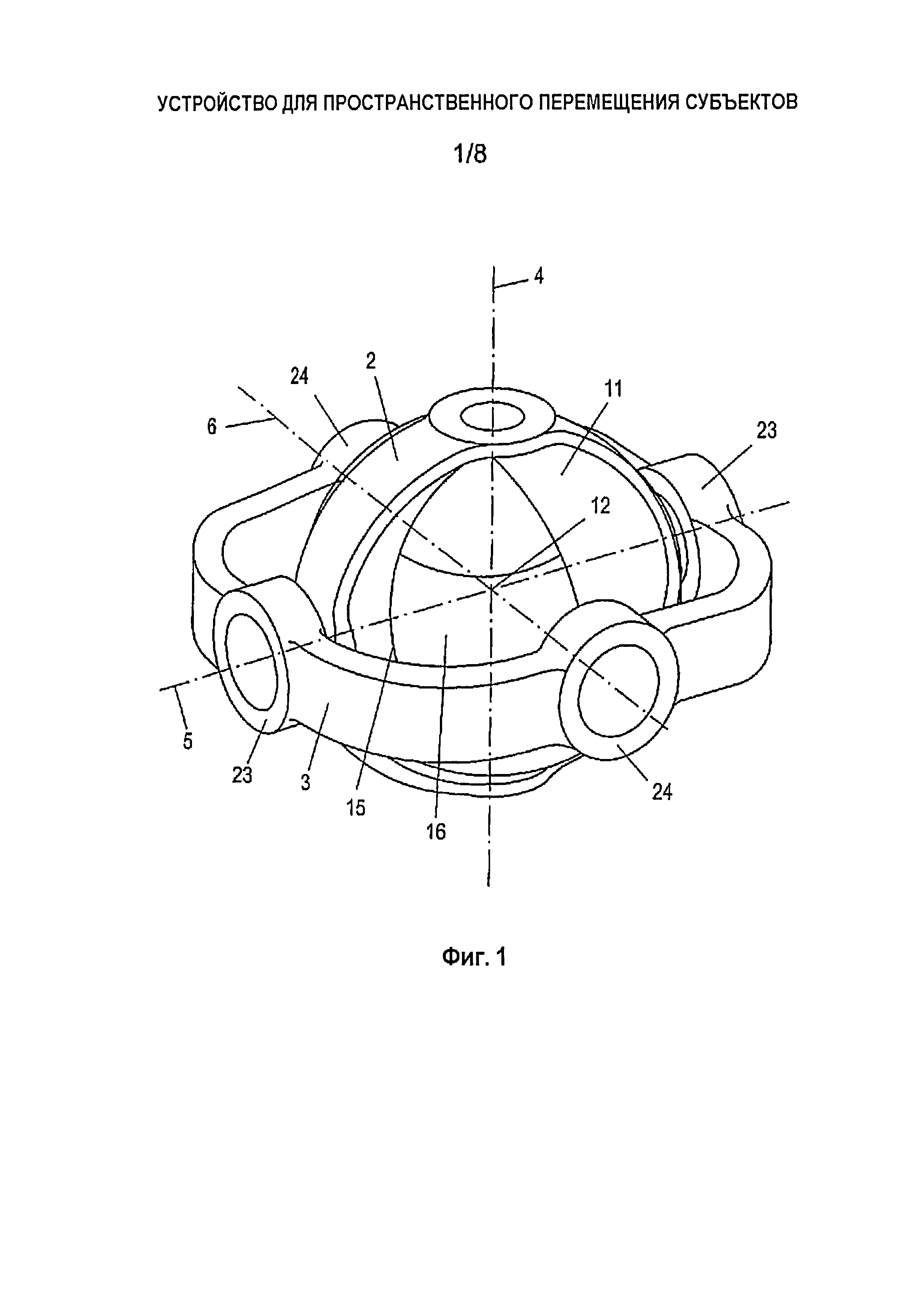
Фиг. 1 показывает вид в перспективе кабины симулятора в соответствии с изобретением.
Фиг. 2 показывает поперечное сечение кабины симулятора в соответствии с изобретением
Фиг. 3 показывает поперечное сечение кабины симулятора по плоскостям сечения III-III на Фиг. 2, причем поперечное сечение Фиг. 2 II-II представлено на Фиг. 3.
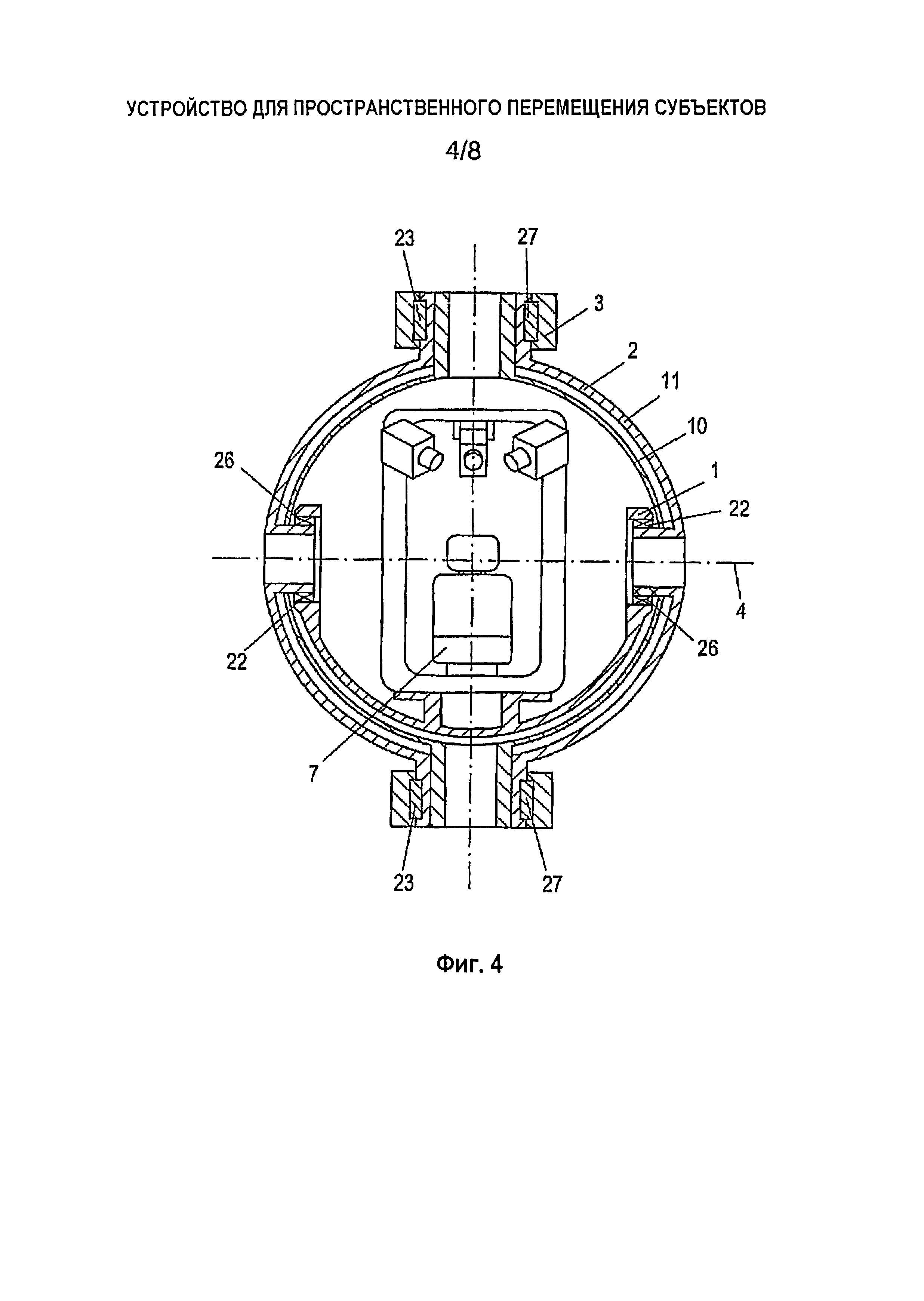
Фиг. 4 показывает поперечное сечение представления дополнительного варианта осуществления настоящего изобретения.
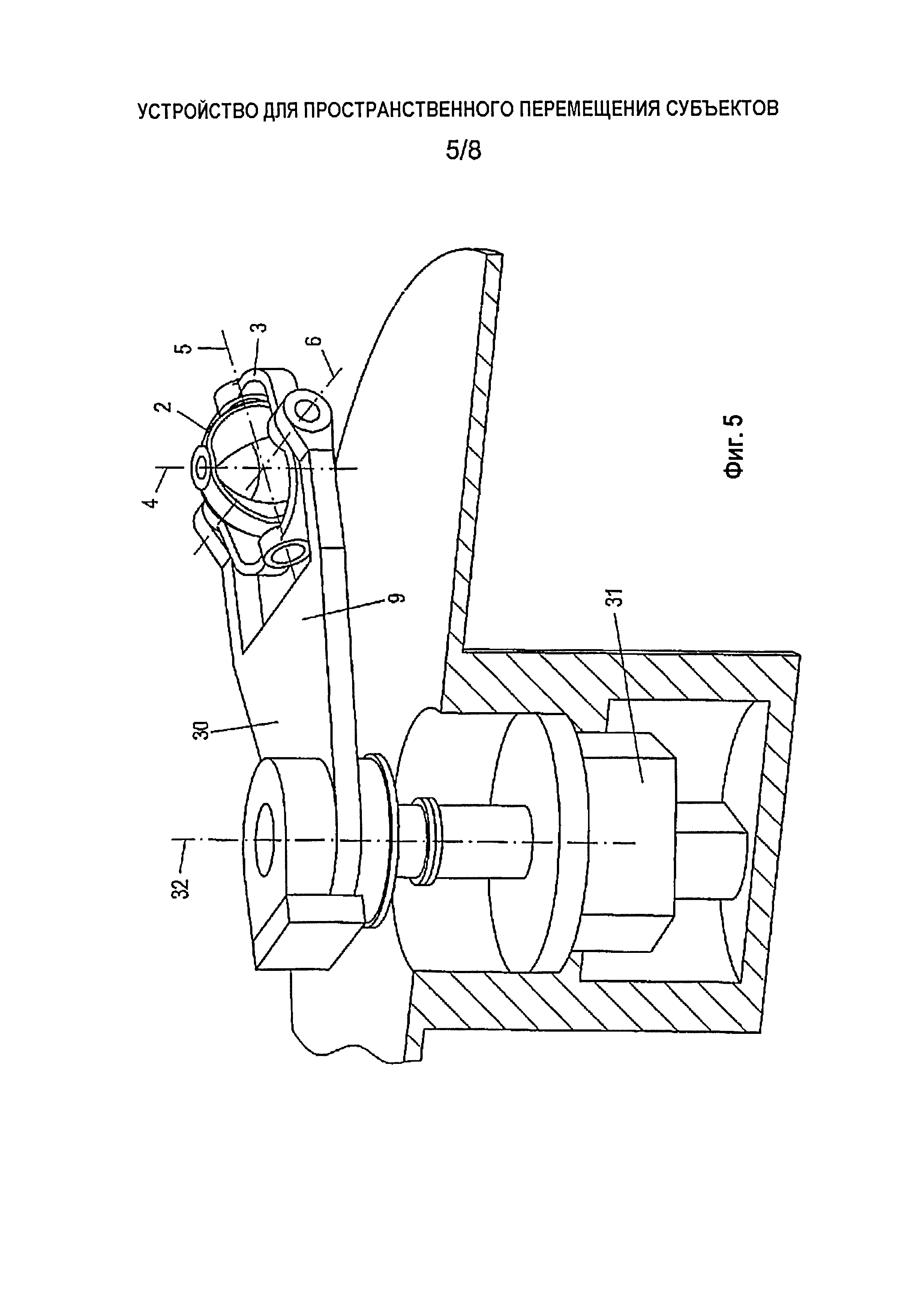
Фиг. 5 показывает устройство кабины симулятора в соответствии с изобретением с одноплечевой центрифугой
Фиг. 6 показывает устройство кабины симулятора в соответствии с изобретением с двуплечевой центрифугой
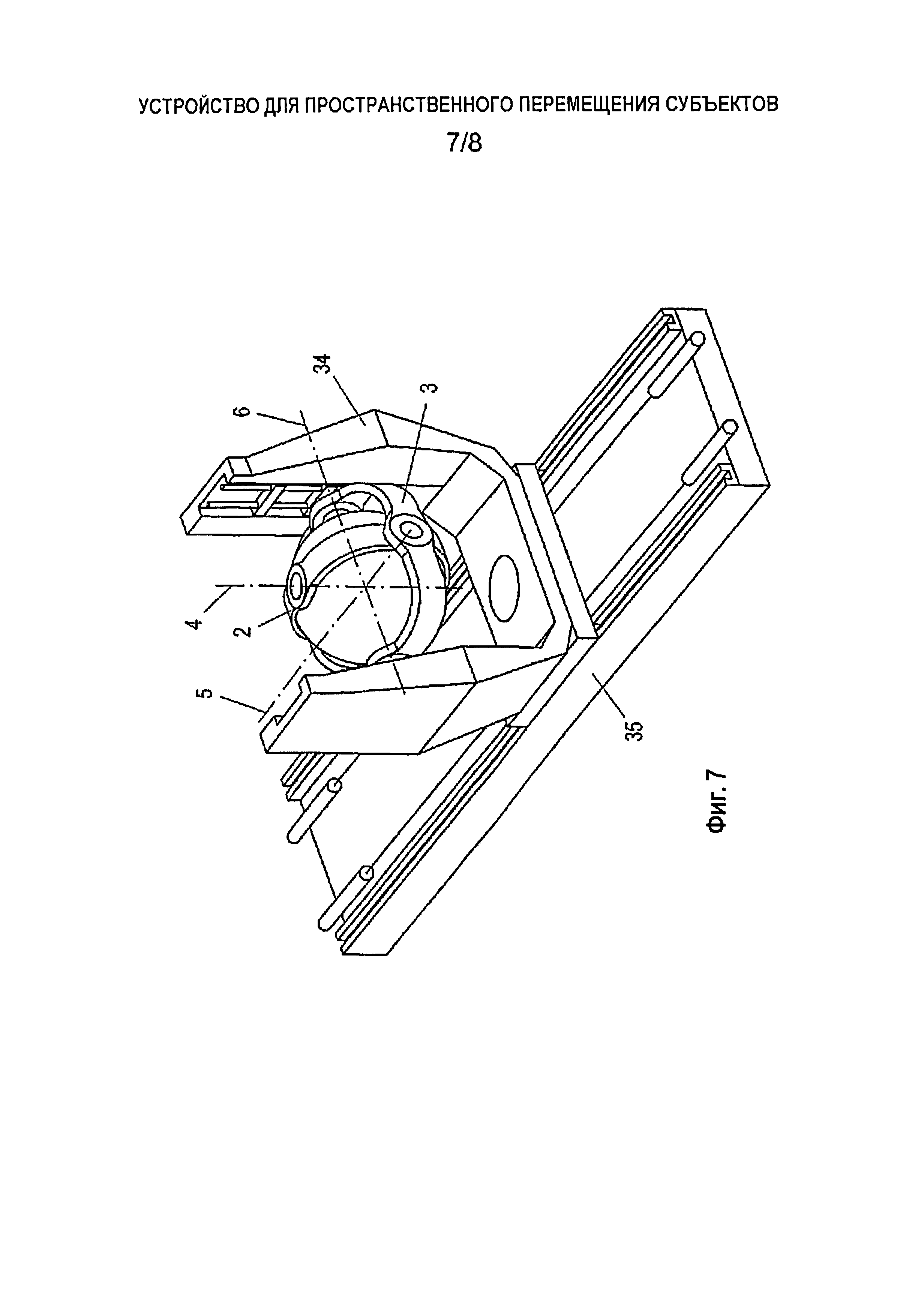
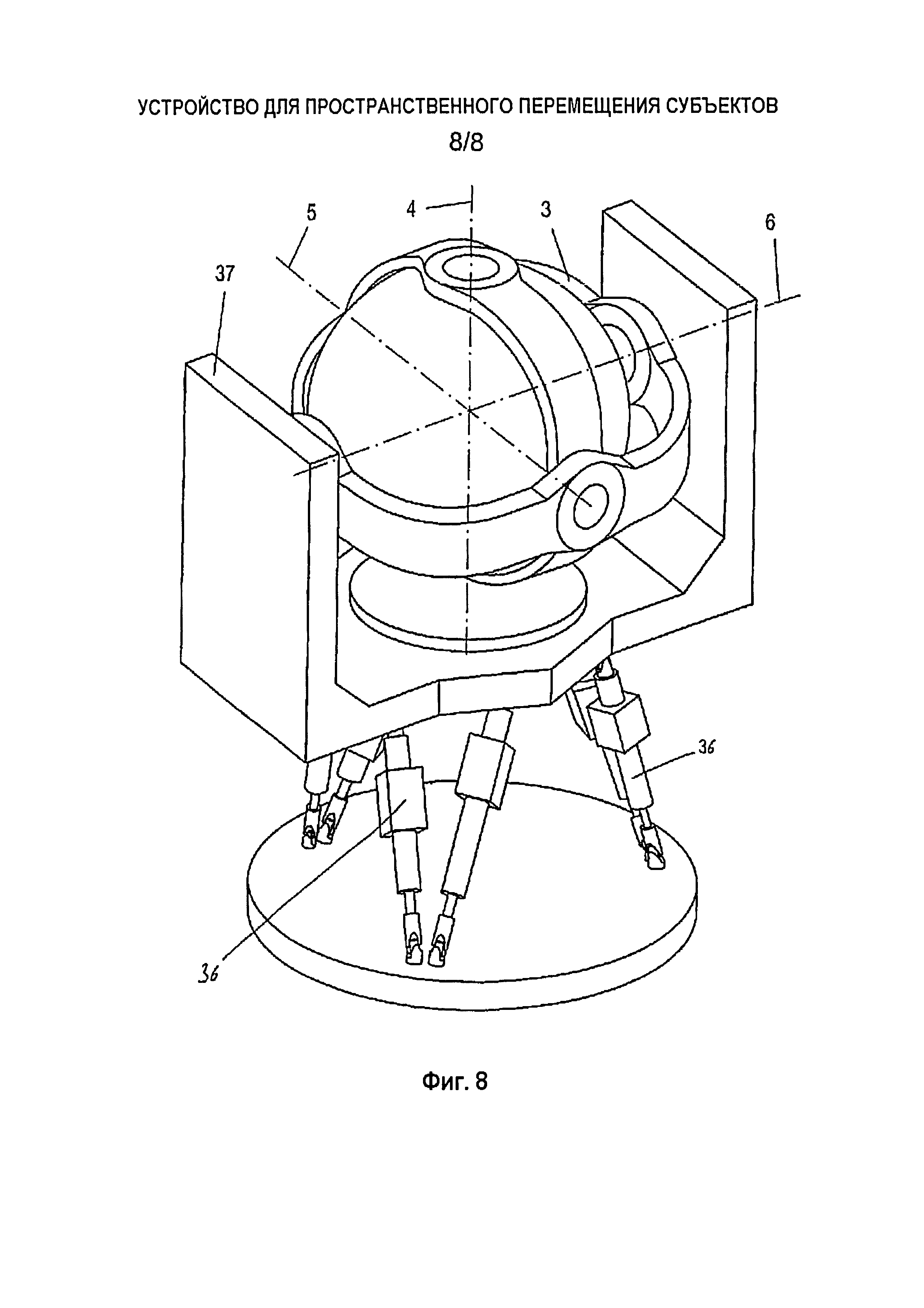
Фиг. 7 показывает устройство кабины симулятора в соответствии с изобретением с тележкой. Фиг. 8 показывает устройство кабины симулятора в соответствии с изобретением в комбинации с гексаподом.
Фиг. 1 показывает вид в перспективе устройства для пространственного перемещения субъектов в соответствии с изобретением, в частности кабину симулятора с третьим опорным элементом 3, на котором расположен второй опорный элемент 2 с возможностью вращения вокруг второй оси вращения 5.
Полый корпус 11 неподвижно соединен со вторым опорным элементом 2. Указанный полый корпус содержит проем 15 и затвор 16. Третий опорный элемент 3 содержит множество, в данном случае четыре, вращательных соединительных устройств 23 и 24. Второе вращательное соединительное устройство 23 используется для соединения и приведения в действие второго опорного элемента 2 относительно третьего опорного элемента 3. Третье вращательное соединяющее устройство используется для вращательного движения третьего опорного элемента 3 по отношению к устройству 9 движения (здесь не показано).
Далее, первая вращательная ось 4, вторая вращательная ось 5 и третья вращательная ось 6 представлены в виде диаграммы. Три вращательные оси, по существу, соответствуют трем вращательным осям устройств, соединенных с возможностью вращения. В представленном базовом положении все три вращательные оси ортогональны друг к другу. Три оси 4, 5, 6 пересекаются в данном варианте осуществления, по существу, в точке, которая расположена в центре 12.
Полый корпус 11 выполнен сферическим и содержит проем 15 для входа и выхода субъекта или используемый в качестве основного люка для транспортировки объектов. Проем 15 может быть закрыт затвором 16, который выполнен, по существу, соответствующим форме полого корпуса 11. Также предпочтительно, в соответствии с идеей, что полый корпус 11 выполнен не непрерывно сферическим, а содержит проемы, и, например, выполнен эллипсоидальным, цилиндрическим или прямоугольным.
Фиг. 2 показывает представление в поперечном сечении варианта осуществления в соответствии с изобретением. Устройство для пространственного перемещения субъекта 8, который расположен на удерживающем устройстве 7, содержит первый опорный элемент 1, который соединен с поддерживающим устройством 7 и расположен с возможностью вращения вокруг первой оси 4 вращения по отношению ко второму опорному элементу 2. Опорный элемент 1 обеспечивает возможность вращения на по меньшей мере 10°, 20°, 30°, 45°, 90°, 180° или 360°. Данное вращение можно обеспечить и регулировать поэтапно, ограниченно или неограниченно.
Второй опорный элемент 2 расположен с возможностью вращения вокруг второй оси 5 вращения по отношению к третьему опорному элементу 3. Ось 5 вращения выходит из данного представления и таким образом изображена в виде точки. Первая вращательная ось 4 и вторая вращательная ось 5 идут, по существу, ортогонально друг другу. Кроме того, обеспечен третий опорный элемент 3, который расположен с возможностью вращения вокруг третьей оси 6 вращения по отношению к устройству 9 движения (здесь не показано), причем вторая ось 5 вращения и третья ось 6 вращения расположены, по существу, ортогонально друг другу. Субъект 8 удерживают посредством удерживающего устройства 7, которое в данном варианте осуществления выполнено в виде сиденья и окружающие части могут воссоздать различные варианты осуществления кабины самолета или вертолета, кабину автомобиля, кабину грузовика и т.д. Форма сиденья, внешняя конструкция или также блоки 21 ввода параметра могут быть адаптированы к специальному применению для этих целей. Блоки ввода параметра могут быть реализованы как, например, джойстики, рулевые колеса, переключатели, ползунки, педали и т.д. В зависимости от применения дисплей на лобовом стекле так же может быть обеспечен. Кабина может быть закрыта или открыта, как представлено здесь. Сиденье, т.е. удерживающее устройство 7 предпочтительно регулируемо, так что голова 13 субъекта 8 может быть расположена в центре 12 устройства. Однако предпочтительно в соответствии с идеей изобретения расположить другие части корпуса в центре, таком как, например, центр тяжести корпуса или сердце субъекта. Для этого удерживающее устройство 7 выполнено с возможностью передвижения в продольном направлении, вертикальном и по выбору в боковом направлении; а также вращения.
Устройство обеспечивает возможность пространственного перемещения субъекта вокруг по меньшей мере трех вращательных осей 4, 5 и 6. Первая вращательная ось 4 соответствует в данном варианта осуществления вертикальной оси, вторая вращательная ось 5 соответствует поперечной оси и третья вращательная ось соответствует продольной оси.
Следует отметить, что в результате вращения удерживающего устройства и субъекта на 90° вокруг конкретной оси другие две оси меняют свои осевые определения. Например, когда удерживающее устройство и субъект повернуты на 90° вокруг вертикальной оси, продольная ось станет поперечной осью, а поперечная ось станет продольной осью. В зависимости от управления и имитации конфигурация осей может, таким образом, быть изменена гибким образом. Другие оси также могут меняться посредством вращения вокруг конкретной оси.
Поверхность 10 для воспроизведения изображений обеспечена на внутренней стороне полого корпуса 11. Поверхность предпочтительно выполнена соответствующей внутренней стороне полого корпуса и продолжающейся за поле зрения, предпочтительно за поле зрения субъекта 8. Первый опорный элемент 1 предпочтительно расположен вне поля зрения субъекта 8. В результате такой компоновки только желаемые части удерживающего устройства являются видимыми для субъекта, в частности части кабины, блоки ввода параметров, дисплеи на лобовом стекле, так же как тело субъекта, сиденье и поверхность для воспроизведения изображений. Движущиеся изображения, в частности, формируемые компьютером изображения окружения, предпочтительно отображают на поверхности 10 для воспроизведения изображений.
Это воспроизведение может быть произведено посредством проекторов, а так же посредством других устройств отображения изображений. Проекторы 25 обеспечены в данном варианте осуществления. Последние проецируют желаемое изображение на, по меньшей мере, поле зрения субъекта 8. Расположение конфигурируют так, чтобы сами проекторы располагались снаружи поля зрения и поля зрения субъекта. Область, на которую проецируют изображение, предпочтительно соответствует, по меньшей мере, полю зрения субъекта 8, или полю, которое проходит вне поля зрения субъекта, так что только облучаемая область видна субъекту. даже когда его голова перемещается. В настоящем варианте осуществления проекторы неподвижно соединены с первым опорным элементом 1. Когда этот элемент вращается вокруг первой оси вращения, проекторы, как и субъект, вращаются и таким образом следуют за полем зрения субъекта.
Устройства 22, 23 и 24, соединенные с возможностью вращения, обеспечены для приведения во вращение вокруг осей 4, 5 и 6 вращения. Первое вращательное устройство 26 и первый носитель 29 обеспечены для вращения вокруг первого опорного элемента. Первое вращательное устройство предпочтительно выполнено как электрическое вращательное устройство, в частности как электрический прямой привод и/или гидравлический привод.
По меньшей мере одно, предпочтительно два вторых вращательных привода 27 также обеспечены для вращения вокруг второго опорного элемента 2 вокруг второй оси вращения. Последнюю можно увидеть в данном представлении.
Третий опорный элемент 3 содержит по меньшей мере третье вращательное устройство, но предпочтительно два третьих вращательных устройства 28. Последнее обеспечивает возможность приведения в действие вращения относительно устройства 9 перемещения. Два вращательных устройства 27 так же могут быть обеспечены в третьем опорном элементе. В этом варианте осуществления приводы для вращения второго опорного элемента относительно третьего опорного элемента и приводы для вращения третьего опорного элемента относительно устройства перемещения должны быть обеспечены в третьем опорном элементе.
Вариант осуществления представленных элементов, которые настолько компактны, насколько возможно, представлены в данной конфигурации. Чтобы достигнуть реалистичной имитации для субъекта, предпочтительно определенное минимальное расстояние от головы 13 субъекта 8 до поверхности для воспроизведения изображений. При увеличении данного расстояния требуется более реалистичное изображение удаленных объектов для отображения окружения. С другой стороны, поверхность 10 для воспроизведения изображений, так же как и три опорных элемента и другие объекты, перемещается с помощью устройства перемещения. В частности, высокое ускорение и силы ускорения, ведущие оттуда, достигаются с помощью варианта осуществления с одноплечевой центрифугой. Размер шарнирного подвеса, сформированного тремя опорными элементами, таким образом, имеет прямое влияние на измерения устройства 9 перемещения. Таким образом, возникает конфликт целей между реалистичным дисплеем и расстоянием, максимально возможным между головой и поверхностью для воспроизведения изображения и поверхностью для воспроизведения изображений и изменениями шарнирного подвеса, который настолько компактен, насколько возможно. Более того, для близости имитации к реальности важно, чтобы опорный элемент лежал вне поля зрения субъекта. Для данного изобретения самое большое расстояние от головы субъекта до поверхности для воспроизведения изображения достигается тем, что оно не обеспечено на глубоком (первом) опорном элементе, а располагается на опорном элементе, лежащем дальше. Однако чтобы достигнуть неискаженной имитации, в частности неискаженного отображения окружения посредством поверхности для отображения изображений, первый опорный элемент, который имеет степень свободы по отношению к поверхности для воспроизведения изображения, дугообразно выходит из поля зрения субъекта. Кроме того, приводы 27 и 28 для вращения вокруг двух вращательных степеней свободы обеспечены в кольце, в данном случае в третьем опорном элементе 3. Опорный элемент, лежащий внутри третьего опорного элемента, т.е. первый и второй опорные элементы могут, таким образом, быть выполнены более компактно. В частности, в настоящем изобретении полый корпус 11 допускает опорные функции и поддерживает второй опорный элемент в смысле прочности.
Управление приводами происходит посредством блока 17 управления (здесь не показан). Последний управляет или регулирует вращательное движение и вращательные положения приводов. Отдельно от управления посредством имитационной модели субъект может сам также влиять на вращательное движение и/или вращательное положение приводов с помощью блоков 21 ввода параметров.
Фиг. 3 показывает поперечное сечение варианта осуществления настоящего изобретения по плоскости III-III на фиг. 2. Более того, плоскость поперечного сечения II-II представлена для поперечного сечения на фиг. 2. Снова первый опорный элемент 1 расположен с возможностью вращения вокруг первой оси вращения на втором опорном элементе 2. Второй опорный элемент выполнен в виде кольца и расположен вокруг второй оси 5 вращения относительно третьего опорного элемента 3. Два вращательных соединительных устройства 23 обеспечены для вращения, причем каждое упомянутое вращательное соединительное устройство содержит второй вращательный привод 27. Последний, как уже было упомянуто в описании фи. 2, обеспечен в третьем опорном элементе, в частности во втором вращательном соединительном устройстве третьего опорного элемента.
Первый опорный элемент 1 соединен посредством первого вращательного соединительного устройства 22 со вторым опорным элементом 2. Также обеспечены первый вращательный привод 26 и первый носитель 29. Однако в соответствии с идеей изобретения предпочтительно расположить два вращательных привода. В принципе, возможно интегрировать носитель в приводы или выполнить привод и носитель как независимые блоки.
Далее, представлены удерживающее устройство 7, три проектора 25 и поверхность 10 для воспроизведения изображения. В зависимости от применения и размера поверхности для отображения изображений может быть предпочтительно использовать больше или меньше проекторов, но предпочтительно три.
Кроме того, в данном варианте осуществления первая ось 4 вращения соответствует вертикальной оси, вторая ось 5 вращения соответствует поперечной оси и третья ось 6 вращения соответствует продольной оси.
Фиг. 4 показывает дополнительный вариант осуществления, в котором конфигурация оси отличается от предыдущих примеров. Опять же, первый опорный элемент 1 установлен с возможностью вращения вокруг первой вращательной оси 4 относительно второго опорного элемента 2. Первый опорный элемент 1 дугообразно продолжается вокруг удерживающего устройства 7 и расположен с возможностью вращения и приведения в действие вокруг поперечной оси. Второй опорный элемент 2 выполнен кольцеобразным и содержит диаметрально противоположные вращательные соединительные устройства, в частности два вращательных соединительных устройства 23, расположенных вдоль вертикальной оси. Вращательное соединительное устройство 23 также, по меньшей мере, частично является компонентом третьего опорного элемента, который выполнен в виде кольца вокруг поверхности для воспроизведения изображений, обеспеченной на втором опорном элементе, причем указанная поверхность для воспроизведения изображений предпочтительно соответствует внутренней стороне полого корпуса 11. Далее, третий опорный элемент 3 для вращения относительно устройства перемещения содержит по меньшей мере один, предпочтительно два третьих вращательных соединительных устройства 24, которые расположены диаметрально противоположно и которые не видны в области представления. Первый опорный элемент, который имеет дугообразную форму, также содержит два первых вращательных соединительных устройств 22, расположенных диаметрально противоположно. Третий опорный элемент выполнен в форме кольца, причем кольцо расположено вертикально в основном положении.
В данной конфигурации первый опорный элемент обеспечен для вращения вокруг поперечной оси, второй опорный элемент обеспечен для вращения вокруг для вертикальной оси и третий опорный элемент обеспечен для вращения вокруг продольной оси. Как также было упомянуто в других вариантах осуществления, изменение расположения определенных осей возможно с помощью вращения вокруг осей 4, 5 и 6 вращения, вращательные соединительные устройства, расположенные диаметрально противоположно, которые также представлены в других примерах вариантов осуществлений, содержат приводы 26, 27 и 28 и носитель для направления вращательного движения. В варианте осуществления в соответствии с фиг. 4 части первого опорного элемента расположены в поле зрения субъекта 8. Во многих случаях, например, когда поле зрения сужается из-за шлема или непрозрачных элементов кабины, это не ослабляет реалистичность отображения окружения на поверхности для воспроизведения изображений, поскольку эти области в любом случае удалены. В других случаях первый опорный элемент находится в любом случае вне поля зрения субъекта.
Фиг. 5 показывает устройство в соответствии с изобретением для пространственного перемещения субъекта, причем устройство 9 перемещения выполнено как одноплечевая центрифуга. Последняя содержит основное плечо 30, которое выполнено с возможностью вращения вокруг основной оси 32 вращения и приводится в действие посредством основного привода 31. Основной привод 31 содержит приводной мотор и соединяющие элементы, а также средства для управления вращением. Основной привод 31 предпочтительно так же выполнен с возможностью управления посредством блока 17 управления и, более того, на него может влиять субъект с помощью блоков 21 ввода параметров и имитационная модель. Основной привод, по существу, используемый для влияния на базовое ускорение, содержит гравитационное ускорение, центростремительное ускорение и тангенциальное ускорение в его величине и вариантах. Базовое ускорение всегда действует вдоль результирующей трех векторов ускорения. Чтобы подвергнуть субъекта различным состояниям ускорения, удерживающее устройство 7 и, таким образом, субъект 8 могут вращаться вокруг трех осей 4, 5 и 6 вращения. Далее, воздействию перемещения и/или ускорения помогает проекция или отображение изображений окружения на поверхности 10 для воспроизведения изображений, в результате чего может быть имитирована фактически реальная последовательность движений для наблюдаемого субъекта.
Такая последовательность движений может быть примером полетных ситуаций, ситуаций в управлении машиной, а также испытанием под нагрузкой и т.д. Имитационная модель, на которой основана имитация, предпочтительно высчитывается посредством устройства обработки данных, например, такого как компьютер.
В данной конфигурации третий опорный элемент 3 расположен с возможностью вращения вокруг третей оси 6 вращения относительно устройства 9 перемещения. Второй опорный элемент 2 также расположен с возможностью вращения, а именно вокруг второй оси 5 вращения, на третьем опорном элементе 3. Это две оси вращения соответствуют двум степеням свободы, причем третья степень свободы обеспечена посредством возможности первого опорного элемента 1 вращаться вокруг первой оси 4 вращения.
Основной привод 31 и необходимый носитель и структурное оборудование представлены схематически, расположены утопленными в основание.
В соответствии с дополнительным вариантом осуществления (не представлено) третий опорный элемент соединен неподвижно с устройством перемещения, например с плечом одноплечевой центрифуги. Опорный элемент может таким образом быть частью плеча, на котором остальные опорные элементы расположены с возможностью вращения.
Фиг. 6 показывает дополнительный вариант осуществления устройства в соответствии с изобретением. Три опорных элемента 1, 2, 3 обеспечены на подъемной тележке. Последняя расположена на переносной корзине 33 тележки и может пересекать с обеих сторон основную ось 32 вращения. Корзина 32 тележки двуплечевой центрифуги выполнена с возможностью вращения вокруг основной оси 32 и приведения во вращение посредством основного привода 31.
В результате этой конфигурации также возможно варьировать результирующие ускорения посредством изменения расстояния от субъекта до основной оси вращения 31 с постоянной угловой скоростью основного привода 31. В дополнение к этим степеням свободы третий опорный элемент 33 выполнен с возможностью вращения вокруг третьей оси 6 вращения и соединен любым другим способом с возможностью приведения в действие с подъемной тележкой. Более того, подъемная тележка содержит привод для поступательного снятия с опорного элемента, причем направление привода этого вертикального подъемника идет, по существу, параллельно основной оси 32 вращения. Отдельно от трех вращательных степеней свободы вокруг осей 4, 5 и 6 вращения субъект может, таким образом, также передвигаться поступательно параллельно основной оси 32 вращения, поступательно вдоль корзины 33 тележки и вращательно вокруг основной оси 32 вращения. Направление поступательного движения подъемной тележки в корзине тележки приблизительно соответствует прямой линии, которая идет нормально основной оси вращения 32 и нормально третьей оси 6 вращения.
На ускорения и их варианты можно воздействовать посредством различных последовательностей движений:
Ускорение посредством вращения корзины тележки:
Корзина тележки, таким образом, вращается вокруг своей оси вращения, причем она продолжается в обе стороны за эту ось вращения. Подъемная тележка расположена линейно съемным образом на корзине тележки. Если подъемная тележка расположена точно над осью вращения вращающейся корзины тележки, никакие дополнительные ускорения не будут воздействовать на субъект отдельно от гравитационного ускорения. Хотя пользователь вращается, он осознает этот состояние, по существу, как неподвижное, поскольку у него нет визуального стимула вращения в закрытом полом теле, а именно вследствие скрытия целого поля зрения снаружи.
Если подъемная тележка перемещается из оси вращения, центробежное ускорение возрастает с расстоянием от оси вращения. Результирующая ускорения содержит гравитационное ускорение и центробежное ускорение, испытываемое субъектом. Если подъемная тележка перемещается обратно и пересекает ось вращения корзины тележки, меняется ощущение пользователем ориентации центростремительного ускорения. В зависимости от скорости передвижения подъемной тележки ускорение Кориолиса также возрастает.
Чтобы варьировать результирующую ускорения по величине, можно варьировать либо угловую скорость корзины тележки, либо сама подъемная тележка может перемещаться в различных направлениях.
Ускорение поступательно перемещения:
Изменение линейной скорости подъемной тележки вдоль корзины тележки посредством заявленного поступательного, по существу, линейного перемещения и изменение линейной скорости опорных элементов посредством вертикального подъемника и дополнительных возможностей для приложения ускорения к пользователю.
Изменение направления ускорения:
Чтобы изменить результирующую ускорения, действующую на тело, предпочтительно перемесить тело субъекта, чтобы таким образом создать, например, впечатление изменения направления ускорения или амплитуду компонента ускорения. Это производится для вращения опорного элемента вокруг осей 4, 5 и 6 вращения, которые во всех примерах вариантов осуществления относятся к шарнирной подвеске. Удерживающее устройство и, таким образом, тело субъекта могут вращаться произвольно посредством упомянутых вращательных степеней свободы. Дополнительно весь шарнирный вал расположен с возможностью вращения на вертикальном подъемнике.
Комплект приводов предусмотрен для перемещения элементов устройства в соответствии с изобретением. Регулирующие переменные для этих приводов могут быть либо вычислены из физической имитацонной модели либо предварительно выбраны посредством управляющего центра. Формирование аудиовизуальных стимулов, таким образом, может либо быть получено из физической имитационной модели либо следовать за фиксированной последовательностью.
Оси вращения корзины тележки проходят вертикально.
Перемещение подъемной тележки в корзине тележки происходит вдоль прямой линии, причем прямая линия идет ортогонально оси вращения корзины тележки и имеет общую точку пересечения с ней. Направление движения вертикального подъемника также нормально прямой линии движения подъемной тележки и, таким образом, параллельно оси вращения корзины тележки. Ось вращения шарнирной подвески относительно вертикального подъемника идет тангенциально к орбите корзины тележки и, таким образом, горизонтально и нормально направлению движения вертикального подъемника.
Фиг. 7 показывает дополнительный возможный вариант осуществления устройства в соответствии с изобретением для пространственного перемещения субъекта. Обеспечена подъемная тележка, которая может перемещаться поступательно. Эта конфигурация соответствует в широком понимании конфигурации с фиг. 6, на которой вместо установленной с возможностью вращения корзины 33 тележки неподвижно расположена направляющая 35 тележки. Подъемная тележка расположена на направляющей тележки с возможностью пересечения и приведения в действие. Подъемная тележка также имеет поступательную степень свободы, которая лежит приблизительно нормально к направлению направляющей тележки. Третий опорный элемент 3 расположен на последней также с возможностью вращения вокруг третей оси. Второй опорный элемент 2 также расположен с возможностью вращения относительно третьего опорного элемента и неподвижно соединен с полым корпусом 11. Первый опорный элемент 1 расположенный внутри полого корпуса 11, выполнен с возможностью вращения вокруг первой оси 4 вращения относительно второго опорного элемента. Первый опорный элемент также соединен с удерживающим устройством 7 для субъекта 8. Представленный вариант осуществления, в частности, хорошо подходит для продольных динамических имитаций и/или пересекающих динамических имитаций, в частности для имитации вождения в автомобильном секторе, таком как, например, смена дороги или маневр обгона.
Фиг. 8 показывает дополнительный вариант осуществления настоящего устройства. Удерживающее устройство 7 для субъекта можно передвигать посредством гексапода, причем указанное удерживающее устройство расположено с возможностью вращения вокруг трех осей вращения. Гексапод содержит шесть устройств 36 линейного перемещения, которыми можно управлять и изменять их длину. Наклон удерживающего устройства 37 можно варьировать по нескольким осям посредством управляемого изменения длины отдельных устройств линейного перемещения. Третий опорный элемент 3 расположен с возможностью вращения на удерживающем устройстве 37. Конфигурация первого и второго опорного элемента и полого корпуса 11 может быть выполнена в соответствии с один предыдущим примером варианта осуществления. Далее, удерживающее устройство 37 третьего опорного элемента может быть расположено относительно гексапода с возможностью неограниченного вращения, причем ось вращения и базовом положении идет, по существу, вертикально и может быть наклонена посредством движения линейного устройства 36 перемещения.
В соответствии с дополнительным вариантом осуществления (не представлено) удерживающее устройство 7 для, по меньшей мере, субъекта 8 установлено с возможностью вращения и приведения в действие только вокруг двух осей вращения отдельно от степеней свободы устройства перемещения. Возможны устройства 9 перемещения, например одноплечевая центрифуга, причем третий опорный элемент жестко соединен с устройством перемещения. В качестве возможного варианта осуществления первый опорный элемент расположен с возможностью вращения вокруг поперечной оси и второй опорный элемент расположен с возможностью вращения вокруг продольной оси. Основная кинематическая схема соответствует традиционной одноплечевой центрифуге, причем субъект расположен тангенциально в направлении вращения, глядя вокруг основной оси 32 вращения основного плеча 30. Кроме того, в данном изобретении поверхность 10 для воспроизведения изображения обеспечена на втором опорном элементе 2 и неподвижно соединена с последним. Удерживающее устройство 7, которое соединено с первым опорным элементом 1, имеет вращательную степень свободы относительно второго опорного элемента 2 и, таким образом, поверхности 10 воспроизведения изображений, которая предпочтительно выполнена повторяющей внутреннюю сторону полого корпуса 11. Полый корпус 11 может, как и в предыдущих примерах вариантов осуществления, допускать самоподдерживающие и упрочняющие функции и/или может быть выполнен как независимый корпус с легкой конструкцией. В результате обеспечения поверхности для воспроизведения изображений на втором опорном элементе отображающая плоскость изображений расположена на расстоянии от наблюдателя, в результате чего впечатление от отображения удаленного окружения улучшается. Также задача изобретения решается посредством того, несмотря на большое расстояние между поверхностью для воспроизведения изображений и глазом субъекта, размер может оставаться компактным. В данном варианте осуществления, таким образом, третья ось 6 вращения отсутствуе, либо она представлена, но заблокирована для вращения. Третий опорный элемент может быть жестко соединен с устройством перемещения или может быть также интегрирован в устройство перемещения, например в плечо одноплечевой центрифуги.
Дополнительный вариант (не представлен), по существу, соответствует изображенному на фиг. 8, но обеспечено гексаподное устройство перемещения. С другой стороны, удерживающее устройство 37 жестко соединено с основой. В данном варианте осуществления вращение субъекта возможно вокруг трех осей вращения, которые пересекаются в центре 12 в области головы.
В сочетании с одно- или многоплечевой центрифугой дополнительные признаки, существенные для изобретения, - это то, что расположение субъекта таким образом, чтобы достигнуть радиального направления взгляда в основном положении возможно посредством сборки с возможностью вращения удерживающего устройства вокруг трех осей вращения в течение имитации. В случае неускоренного или почти статичного движения или неподвижности статичное состояние имитируется для субъекта, основное плечо устройства перемещения вращается постоянно, с относительно медленной скоростью вокруг основной оси 32. Субъект привязан с помощью привязного ремня на удерживающем устройстве и смотрит, по существу, в радиальном направлении наружу или внутрь, а именно в сторону основной оси 32 вращения или в противоположную сторону от основной оси 32 вращения. Воздействие на субъект немного увеличено, постоянное базовое ускорение, которое, однако, по существу, субъект не осознает, увеличивают после короткой фазы адаптации. Для того, например, чтобы имитировать пусковое ускорение транспортного средства, субъекта вращают вокруг поперечной оси, в результате чего результирующая гравитационного ускорения и центростремительного ускорения относительно положения тела субъекта меняется. В базовом положении результирующая ускорения направлена, например, вниз, т.е. вдоль вертикальной оси. С помощью вращения субъекта вокруг поперечной оси можно имитировать такие ускорения линейно движущегося транспортного средства, как пусковое ускорение или ускорение торможения. Направление взгляда субъекта с постоянным вращением устройства перемещения всегда направлено радиально внутрь или наружу. Полученное полное ускорение достигается с помощью управления скоростью вращения вокруг основной оси 23 вращения. Чтобы имитировать боковое ускорение, удерживающее устройство с субъектом могут вращать вокруг продольной оси.
Дополнительный вариант осуществления относится к устройству для пространственного перемещения субъекта, содержащему первый опорный элемент 1, который содержит удерживающее устройство 7 для по меньшей мере одного субъекта 8 и расположено с возможностью вращения вокруг первой оси 4 вращения относительно второго опорного элемента 2; второй опорный элемент 2, который расположен с возможностью вращения вокруг второй оси 5 вращения относительно третьего опорного элемента 3, причем первая ось 4 вращения и вторая ось 5 вращения расположены, по существу, ортогонально друг другу; и поверхность 10 для воспроизведения изображений; причем поверхность 10 для воспроизведения изображений обеспечена на втором опорном элемент 2, на третьем опорном элементе 3 или на устройстве 9 перемещения, причем удерживающее устройство 7 имеет по меньшей мере одну вращательную степень свободы, допускающую вращение на по меньшей мере 10°, 20°, 30°, 45°, 90°, 180° или 360° относительно поверхности 10 для воспроизведения изображений.
Дополнительный вариант осуществления относится к такому же устройству для пространственного перемещения субъекта, содержащему первый опорный элемент 1, который содержит удерживающее устройство 7 для по меньшей мере одного субъекта 8 и расположен с возможностью вращения вокруг первой оси 4 вращения относительно второго опорного элемента 2; второй опорный элемент 2, который расположен с возможностью вращения вокруг второй оси 5 вращения относительно третьего опорного элемента 3, причем первая ось 4 вращения и вторая ось 5 вращения расположены, по существу, ортогонально друг другу; третий опорный элемент 3, который расположен с возможностью вращения вокруг третьей оси 6 вращения относительно устройства перемещения 9, причем вторая ось 5 вращения и третья ось 6 вращения расположены, по существу, ортогонально друг другу; и поверхность 10 для воспроизведения изображений; причем поверхность 10 для воспроизведения изображений обеспечена на втором опорном элементе 2, соединенном с последней.
Также должно быть понятно, что воспроизводящая поверхность обозначена как поверхность, но также может содержать множество поверхностей, соединенных вместе. Все представленные варианты осуществления и все варианты осуществления, очевидные для специалиста в данной области техники, содержат по меньшей мере одно удерживающее устройство 7 для субъекта 8, поверхность для воспроизведения изображений, по меньшей мере один привод, который может управляться посредством по меньшей мере одного блока управления. Касательно блока управления, это возможно во всех примерах варианта осуществления для имитационной модели, но также субъект может воздействовать на блок управления с помощью блока 21 ввода параметров. В данном варианте осуществления удерживающее устройство 7 предпочтительно выполнено в виде сиденья, в частности в виде сиденья с привязными средствами, такими как ремень.
Три оси 4,5 и 6 вращения или в вариантах осуществления только с двумя степенями свободы оси 4 и 5 пересекаются в точке. Однако может быть предпочтительно разместить оси на определенном нормальном расстоянии друг от друга. Это нормальное расстояние может предпочтительно иметь величину наименьшего расстояния между глазами или органами равновесия субъекта.
Далее, различные варианты осуществления на фиг. 1, 2, 3 и 4 могут также объединяться с соответствующими устройствамиперемещения с фиг. 5-8 и с устройствами перемещения, которые не показаны.
Более того, следует упомянуть, что изобретение не ограничено показанными примерами вариантов осуществления. Дополнительные варианты осуществления, соответствующие идее изобретения, также возникают из объединения отдельных или нескольких признаков, которые также могут быть получены из описания, фигур и/или пунктов формулы изобретения. Таким образом, также раскрыты варианты осуществления, которые содержат совокупность признаков из различных примеров вариантов осуществления. Фигуры представлены схематично, при этом измерения и пропорции могут расходиться с другим вариантами осуществления или признаками, не показанными на чертежах или представленными в реальном воплощении:
1. первый опорный элемент
2. второй опорный элемент
3. третий опорный элемент
4. первая ось вращения
5. вторая ось вращения
6. третья ось вращения
7. удерживающее устройство
8. субъект
9. устройство перемещения
10. поверхность для воспроизведения изображений
11. полый корпус
12. центр
13. голова
14. поле зрения
15. проем
16. затвор
17. блок управления
21. блок ввода параметров
22. первое вращательное соединительное устройство
23. второе вращательное соединительное устройство
24. третье вращательное соединительное устройство
25. проектор
26. первый вращательный привод
27. второй вращательный привод
28. третий вращательный привод
29. первый носитель
30. основное плечо
31. основной привод
32. основная ось вращения
33. корзина тележки
34. подъемная тележка
35. направляющая тележки
36. устройство линейного перемещения
37. удерживающее устройство.
Реферат
Устройство для пространственного перемещения субъектов содержит устройство перемещения, три опорных элемента, поверхность для воспроизведения изображений, блок управления, блок ввода параметров, приводы для каждой оси вращения. Устройство для перемещения выполнено виде одноплечевой или двухплечевой центрифуги, с проходящей в обе стороны или съемной или подъемной тележкой. Первый опорный элемент содержит удерживающее устройство для субъекта и расположен с возможностью вращения относительно второго опорного элемента. Удерживающее устройство имеет определенную вращательную степень свободы относительно поверхности для воспроизведения. Второй опорный элемент расположен с возможностью вращения относительно третьего опорного элемента. Обеспечивается реалистичная имитация движения в виртуальной реальности. 14 з.п. ф-лы, 8 ил.
Формула
устройство (9) перемещения, которое выполнено в виде одноплечевой центрифуги, центрифуги с проходящей тележкой, центрифуги с проходящей съемной тележкой, двуплечевой центрифуги с тележкой, проходящей в обе стороны, или двуплечевой центрифуги с подъемной тележкой, проходящей в обе стороны,
- первый опорный элемент (1), который содержит удерживающее устройство (7) для по меньшей мере одного субъекта (8) и расположен с возможностью вращения вокруг первой оси (4) вращения относительно второго опорного элемента (2);
- второй опорный элемент (2), который расположен с возможностью вращения вокруг второй оси (5) вращения относительно третьего опорного элемента (3), причем первая ось (4) вращения и вторая ось (5) вращения расположены, по существу, ортогонально друг другу;
- и поверхность (10) для воспроизведения изображений;
отличающееся тем, что
первый опорный элемент (1) и/или удерживающее устройство (7) имеет вращательную степень свободы относительно поверхности (10) для воспроизведения изображения,
и тем, что опорные элементы (1, 2, 3) и устройство (9) перемещения в каждом произвольном положении и положении при вращении находятся вне поля (14) зрения субъекта (8).
- третий опорный элемент (3) расположен с возможностью вращения вокруг третьей оси (6) вращения относительно устройства (9) перемещения, причем вторая ось (5) вращения и третья ось (6) вращения расположены, по существу, ортогонально друг другу, или тем, что третий опорный элемент (3) жестко соединен с устройством (9) перемещения.
или что первая ось (4) вращения соответствует вертикальной оси, вторая ось (5) вращения соответствует продольной оси и третья ось (6) вращения соответствует поперечной оси,
или что первая ось (4) вращения соответствует поперечной оси, вторая ось (5) вращения соответствует продольной оси и третья ось (6) вращения соответствует вертикальной оси,
или что первая ось (4) вращения соответствует продольной оси, вторая ось (5) вращения соответствует поперечной оси и третья ось (6) вращения соответствует вертикальной оси.
Документы, цитированные в отчёте о поиске
Устройство для имитации движения транспортного средства
Комментарии