Устройство для пространственного перемещения по меньшей мере одного человека - RU2679105C2
Код документа: RU2679105C2
Чертежи


Описание
Изобретение относится к устройству для пространственного перемещения по меньшей мере одного человека и, в частности, для имитации условий ускорения или последовательностей ускорения.
В случае необходимости, устройство может быть системой, которая содержит множество компонентов, которые выполнены с возможностью обеспечения пространственного перемещения человека. В соответствии с предпочтительным вариантом устройство или система согласно изобретению выполнена в виде тренажера, имитатора перемещения или имитатора ориентации.
Устройство согласно изобретению предпочтительно используется для имитации движущихся объектов, таких как, например самолеты, вертолеты, автомобили, корабли, и подобные объекты. При использовании устройства для человека, находящегося в кабине или полом корпусе, имитируется ощущение виртуальной реальности посредством множества искусственно сформированных сенсорных восприятий. Эти сенсорные стимулы, с одной стороны, являются аудиовизуальными стимулами, которые подают пользователю с помощью системы воспроизведения изображений и системы воспроизведения звука. Дополнительно устройство согласно изобретению предпочтительно используется для генерирования ускорений, крутящих моментов и/или сил, которые действуют на пользователя. Путем сочетания аудиовизуального, визуального, кинематического, кинетического и/или физического сенсорного ощущения человеческий мозг интерпретирует виртуальные состояния движения и ускорения. Более конкретно, сенсорные восприятия имитируют действительные сенсорные восприятия в таких ситуациях, и эта интерпретация становится для пользователя более реалистичной. По этой причине, предпочтительно подавать эти сигналы пользователю способом, настолько точным чувственному восприятию человека, насколько это возможно. Устройство также предпочтительно содержит средство, позволяющее человеку оказывать некоторое влияние на имитацию. При оказании такого влияния человек может, например, управлять перемещением имитированного объекта в виртуальном имитированном мире, а также перемещением самого устройства.
Управляющие сигналы, производимые пользователем, и любые окружающие воздействия (ветер, неровности дорожного полотна, и т.д.), предпочтительно подаются на физическую имитационную модель, которая соответствует или, по меньшей мере, имеет большое сходство с математическим отображением реальных характеристик объекта имитации. Они включают в себя переменные, такие как моменты инерции, сопротивление и т.д. Эта модель используется в качестве основы для вычисления, в частности, ускорений, крутящих моментов и/или сил и их направлений, которые будут поданы пользователю в виртуальном мире. Это осуществляется посредством управления различными приводами с помощью блока управления.
Чтобы обеспечить состояния ускорения и, в частности, изменения ускорения, подлежащие имитации, настолько точным чувственному восприятию образом, насколько это возможно, предпочтительно, если и амплитуду, и частоту, и/или профиль последовательности ускорения можно воспроизвести точно и с высокой верностью, насколько это возможно. Например, в тренажерах для реалистической имитации устойчивого состояния полета, относительно небольшие изменения ускорения должны быть точно имитированы с течением времени. С другой стороны, для имитации высоко динамичных маневров с большими ускорениями, необходимо имитировать такие экстремальные изменения направления, большие ускорения и быстрые изменения ускорения.
Например, согласно изобретению можно воспроизвести ускорения более чем или до 2, 3, 4, 5, 6, 7, 8 или 9 g. Чтобы суметь имитировать быстрые маневры настолько точным чувственному восприятию образом, насколько это возможно, возможный временной градиент ускорения должен быть более чем или до 1 g/s, 2 g/s, 3 g/s. Единица g определяется как ускорение вследствие гравитации или множитель ускорения вследствие гравитации. Изменения в направлении ускорения, например, изменения на 180°, вносимые в ориентацию ускорения при частоте более 2 Гц, также должны быть отображены.
Согласно уровню техники известны двуплечие центрифуги для имитации такого диапазона различных состояний перемещения и ускорения. Обычные двуплечие центрифуги содержат удлиненную клеть с рельсами, которая вращается по центру относительно оси вращения. Тележка, в которой сидит человек, может перемещаться в клети. Согласно предыдущему уровню техники вращаемая клеть установлена симметрично относительно главной оси вращения. При вращении клети и одновременном смещении тележки от нейтрального центрального положения в одну или другую сторону от оси вращения, для человека могут генерироваться ускорения в разных направлениях. Недостаток традиционных двуплечих центрифуг заключается в том, что из-за их большой массы они не пригодны для генерирования ускорений более 3g настолько точным чувственному восприятию образом, насколько это возможно, так как необходимая угловая скорость вращения клети генерирует нереалистичные или неточные чувственному восприятию вторичные силы или препятствующие силы. Также увеличение длины плеча консолей обычной системы с двух сторон не обеспечивает улучшение, поскольку увеличение обычной системы вызывает повышение инерции и, следовательно, превышение пределов механической прочности центрифуги.
Для имитации более высоких ускорений в диапазоне выше 3g, используются одноплечие центрифуги согласно уровню техники. В одноплечей центрифуге кабина установлена на внешнем конце консоли, чтобы кабина могла вращаться на нормальном расстоянии вокруг главной оси вращения, но не могла смещаться. Справедливо, что высокие ускорения можно имитировать с помощью одноплечей центрифуги такого типа. Однако, в одноплечих центрифугах невозможно с достаточной точностью имитировать быстро изменяющиеся малые ускорения или быстро изменяющиеся направления ускорения, например, изменения в ориентации ускорения на 180°, какие случаются в автомобиле во время езды по криволинейному профилю или в статических ситуациях полета и которые по существу имеют место при нормальном (простом) ускорении в силу гравитации.
Следовательно, в устройствах для пространственного перемещения человека и, в частности, в случае имитаторов перемещения, ускорения или ориентации существуют противоречащие цели между
- сенсорно точным представлением высокочастотных изменений малых ускорений, которые происходят при простом ускорении в силу гравитации, и
- сенсорно точным представлением высоких ускорений и градиентов высоких ускорений, которые также могут происходить с высокой частотой.
Задачей изобретения является, в частности, урегулирование этих противоречащих целей.
Задача согласно изобретению решается признаками независимых пунктов формулы.
Изобретение относится, в частности, к устройству, в частности, тренажеру, имитатору движения или имитатору ориентации, для пространственного перемещения по меньшей мере одного человека и, в частности, для имитации последовательностей ускорения, при этом предусмотрено удерживающее приспособление для человека в центре, при этом удерживающее приспособление установлено на тележке с помощью двигательного приспособления, при этом тележка может перемещаться по (предпочтительно горизонтально ориентированному) главному несущему устройству и, в частности, перемещаться линейно, при этом главное несущее устройство установлено так, что оно может вращаться вокруг (предпочтительно вертикально ориентированной) главной оси вращения, может приводиться в действие и, возможно, приводится в действие главным приводом, при этом главное несущее устройство содержит первое главное плечо и второе главное плечо, причем два главных плеча продолжаются радиально наружу в противоположных направлениях от главной оси вращения, при этом центр смещается между первым наружным максимальным положением и вторым наружным максимальным положением перемещением тележки по траектории на главном несущем устройстве, причем в первом наружном максимальном положении центра тележка установлена на первом главном плече, причем во втором наружном максимальном положении центра тележка установлена на втором главном плече, и при этом нормальное расстояние между первым наружным максимальным положением центра и главной осью вращения больше, чем нормальное расстояние между вторым наружным максимальным положением центра и главной осью вращения. В случае необходимости предусмотрено, что траектория центра по главному несущему устройству ограничивается первым наружным максимальным положением и вторым наружным максимальным положением. В случае необходимости предусмотрено, что первое главное плечо, измеренное нормально относительно главной оси вращения, длиннее второго главного плеча, или что главная ось вращения расположена ассиметрично относительно главного несущего устройства по продольному продолжению главного несущего устройства. В случае необходимости предусмотрено, что главное несущее устройство имеет желобчатый или U-образный профиль по траектории, и что тележка направляется по или в главном несущем устройстве и, по меньшей мере, частично окружена главным несущим устройством. В случае необходимости, изобретение также относится к двигательному приспособлению и/или кабине для одного человека. В случае необходимости предусмотрено, что двигательное приспособление содержит первый несущий элемент, который установлен так, что он жестко присоединен или может быть жестко присоединен к удерживающему приспособлению, что первый несущий элемент приводится или может быть приведен во вращение вокруг первой побочной оси относительно тележки, и/или что первая побочная ось проходит через центр. В случае необходимости предусмотрено, что двигательное приспособление содержит первый несущий элемент, который установлен так, что он жестко присоединен или может быть жестко присоединен к удерживающему приспособлению, что первый несущий элемент приводится или может быть приведен во вращение вокруг первой побочной оси относительно тележки, и/или что первая побочная ось проходит через центр, что двигательное приспособление содержит второй несущий элемент, что первый несущий элемент приводится или может быть приведен во вращение вокруг первой побочной оси относительно второго несущего элемента, и что второй несущий элемент приводится или может быть приведен во вращение вокруг второй побочной оси относительно тележки, что первая побочная ось и вторая побочная ось продолжаются по существу ортогонально друг другу, и что первая побочная ось и вторая побочная ось имеют наименьшее нормальное расстояние друг от друга в центре или пересекаются в центре. В случае необходимости предусмотрено, что двигательное приспособление содержит первый несущий элемент, который установлен так, что он жестко присоединен или может быть жестко присоединен к удерживающему приспособлению, что первый несущий элемент приведен или может быть приведен во вращение вокруг первой побочной оси относительно тележки, и/или что первая побочная ось проходит через центр, что двигательное приспособление содержит второй несущий элемент, что первый несущий элемент приведен или может быть приведен во вращение вокруг первой побочной оси относительно второго несущего элемента, и что второй несущий элемент приведен или может быть приведен во вращение вокруг второй побочной оси относительно тележки, что первая побочная ось и вторая побочная ось продолжаются по существу ортогонально друг другу, и что первая побочная ось и вторая побочная ось имеют наименьшее нормальное расстояние друг от друга в центре или пересекаются в центре, что двигательное приспособление содержит третий несущий элемент, что второй несущий элемент приводится или может быть приведен во вращение вокруг второй побочной оси относительно третьего несущего элемента, что третий несущий элемент приводится или может быть приведен во вращение вокруг третьей побочной оси относительно тележки, что вторая побочная ось и третья побочная ось продолжаются по существу ортогонально друг другу, и что вторая побочная ось и третья побочная ось имеют наименьшее нормальное расстояние друг от друга в центре или пересекаются в центре. В случае необходимости предусмотрено, что двигательное приспособление содержит подъемное приспособление для поступательного и, в частности, линейного перемещения удерживающего приспособления, первого несущего элемента, второго несущего элемента и, в случае необходимости, третьего несущего элемента.
В случае необходимости предусмотрено, что двигательное приспособление подъемного приспособления продолжается по существу параллельно главной оси вращения или перпендикулярно траектории, и что подъемное приспособление содержит один или более линейных приводов, например, в частности, электрический или пневматический привод или параллельное кинематическое устройство. В случае необходимости предусмотрено, что удерживающее приспособление расположено в кабине, и что поверхность для воспроизведения изображений для графического представления имитированной окружающей среды предусмотрена в кабине. В случае необходимости предусмотрено, что точная копия объекта, подлежащего имитированию, предусмотрена в кабине, при этом точная копия объекта, подлежащего имитированию, в частности, является точной копией кабины самолета, автомобиля, вертолета или корабля. В случае необходимости предусмотрено, что элементы управления размещены в зоне удерживающего приспособления, что органы управления присоединены к устройству управления и/или системе обработки данных, например, компьютеру, что на перемещение устройства и, в частности, на имитирование можно оказывать влияние, используя элементы управления, чтобы человек в кабине мог управлять имитированным объектом или перемещением устройства. В случае необходимости предусмотрено, что кабина выполнена таким образом, что она закрыта или может быть закрыта, и что кабина содержит отверстие, которое может быть закрыто дверцей.
В случае необходимости предусмотрено, что поверхность для воспроизведения изображений и/или кабина предусмотрена на втором несущем элементе или, в случае необходимости, на третьем несущем элементе, чтобы удерживающее приспособление имело по меньшей мере одну приводимую вращательную степень свободы относительно поверхности для воспроизведения изображения и/или кабины. В случае необходимости предусмотрено, что второй несущий элемент выполнен кольцеобразной или С-образной формы и жестко присоединен к кабине, или что второй несущий элемент содержит участок кольцеобразной или С-образной формы, а кабина является частью второго несущего элемента. В случае необходимости, третий несущий элемент может быть выполнен кольцеобразной формы и продолжается вокруг кабины. В случае необходимости предусмотрено, что третий несущий элемент выполнен кольцеобразной формы и продолжается вокруг кабины, и что углубления для размещения приводов вращения предусмотрены в третьем несущем элементе, при этом приводы вращения, предусмотренные в третьем несущем элементе, выполнены с возможностью вращения второго несущего элемента вокруг второй побочной оси и вращения третьего несущего элемента вокруг третьей побочной оси. В случае необходимости предусмотрено, что подъемное приспособление входит в зацепление на третьем несущем элементе и, в частности в зоне третьей побочной оси. В случае необходимости предусмотрено, что первый несущий элемент выполнен в виде консоли, которая с одной стороны, в частности, позади удерживающего приспособления, присоединена ко второму несущему элементу с возможностью вращения, чтобы первый несущий элемент продолжался позади и/или под человеком от удерживающего приспособления до второго несущего элемента. В случае необходимости предусмотрено, что тележку можно перемещать по главному несущему устройству с помощью приводного устройства тележки. В случае необходимости предусмотрено, что тележка перемещается по главному несущему устройству с помощью приводного устройства тележки, при этом приводное устройство тележки выполнено в виде тросового привода, в виде гидравлического привода, в виде непосредственного привода или непосредственного привода с компенсацией радиальной нагрузки. В случае необходимости предусмотрено, что приводное устройство тележки выполнено в виде тросового привода, который содержит следующие элементы: трос, протягивающийся вокруг множества отклоняющих роликов, который частично прикреплен к главному несущему устройству или входит в зацепление на главном несущем устройстве одним концом, двумя концами или по меньшей мере одним участком; отклоняющие ролики главного несущего устройства, которые установлены на главном несущем устройстве с возможностью вращения, при этом отклоняющие ролики главного несущего устройства расположены в двух наружных зонах главного несущего устройства; или возможно по меньшей мере один, предпочтительно, два отклоняющих ролика, которые установлены на тележке с возможностью вращения; ролик тросового привода для приведения в действие тросового привода.
В случае необходимости предусмотрено, что ролик тросового привода установлен коаксиально с главной осью вращения главного привода, при этом, если тележка неподвижна относительно главного несущего устройства, ролик тросового привода и главный привод имеют одинаковую угловую скорость, и при этом, чтобы переместить тележку по главному несущему устройству, ролик тросового привода и главный привод имеют разные угловые скорости. В случае необходимости предусмотрено, что привод ролика тросового привода установлен в фиксированном положении и, в частности, в фиксированном положении в основании. В случае необходимости предусмотрено, что приводное устройство тележки выполнено в виде гидравлического приводного устройства, причем привод для перемещения тележки по главному несущему устройству обеспечивается гидравлическим цилиндром.
В случае необходимости предусмотрено, что приводное устройство тележки выполнено в виде непосредственного привода, при этом непосредственный привод содержит ведущие колеса, которые установлены на тележке таким образом, что их можно вращать и приводить в действие, при этом ведущие колеса катятся по частям главного несущего устройства, чтобы вызвать перемещение тележки относительно главного несущего устройства, и при этом приводы для ведущих колес, присоединенные к тележке, установлены на самой тележке. В случае необходимости предусмотрено, что приводное устройство тележки выполнено в виде непосредственного привода с дополнительной компенсацией радиальной нагрузки, при этом привод с компенсацией радиальной нагрузки установлен в фиксированном положении и, в частности, в основании, при этом один или более тяговых элементов продолжаются от этого привода с компенсацией радиальной нагрузки до тележки и, в частности, подсоединен или подсоединены к тележке с одного конца, чтобы тяговый элемент в первую очередь компенсировал радиальное ускорение, в частности, чтобы генерировать противодействующую силу радиальному ускорению, и создается функциональное разделение между «удержанием» тележки благодаря компенсации радиальной нагрузки и «перемещением» тележки благодаря непосредственному приводу. В случае необходимости предусмотрено, что тяговый элемент направлен или тяговые элементы направлены в главное несущее устройство в зону главной оси вращения. В случае необходимости предусмотрено, что тяговый элемент выполнен или тяговые элементы выполнены в виде тали. В случае необходимости предусмотрено, что главный привод для вращения главного несущего устройства вокруг главной оси вращения содержит гидравлический привод для главного несущего устройства или электрический привод для главного несущего устройства. В случае необходимости предусмотрено, что главный привод содержит множество приводов главного несущего устройства, например, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22 и более. В случае необходимости предусмотрено, что приводы главного несущего устройства входят в зацепление с центральным элементом, присоединенным к главному несущему устройству посредством цепного колеса и/или упорных колец, чтобы привести главное несущее устройство во вращение вокруг его главной оси вращения. В случае необходимости предусмотрено, что первая побочная ось соответствует продольной оси человека. В случае необходимости предусмотрено, что нормальное расстояние центра от главной оси вращения в первом наружном максимальном положении составляет от 4 до 8 метров, от 5 до 7 метров и/или приблизительно 6 метров. В случае необходимости предусмотрено, что расстояние от центра до главной оси вращения во втором наружном максимальном положении составляет от 0 до 8 метров, от 0,2 до 4 метров, от 1 до 3 метров и/или, в частности, приблизительно 0,2 метра; 0,5 метра; 1 метр; 1,5 метра и 2 метра или, в частности, 3 метра. В случае необходимости предусмотрено, что нормальное расстояние центра от главной оси вращения в первом наружном максимальном положении по меньшей мере в 2 раза, в частности, от 2 до 4 раз, в 3 раза, 5 раз, 10 раз, 20 раз или, в частности, 100 раз больше, чем нормальное расстояние центра от главной оси вращения во втором наружном максимальном положении. Изобретение относится к устройству, в частности, к тренажеру, имитатору движения, для пространственного перемещения по меньшей мере одного человека и, в частности, для имитации последовательностей ускорения, в частности, согласно любому из предыдущих пунктов формулы изобретения, содержащему удерживающее приспособление для удержания человека в зоне центра, при этом удерживающее приспособление установлено на тележке посредством двигательного приспособления, при этом тележка может перемещаться, и, в частности, линейно перемещаться, по горизонтально ориентированному главному несущему устройству, причем главное несущее устройство установлено так, что оно может вращаться, может быть приведено во вращение и, возможно, приведено во вращение вокруг вертикально ориентированной главной оси вращения, при этом главное несущее устройство содержит первое главное плечо и второе главное плечо, причем первое главное плечо и второе главное плечо продолжаются радиально наружу в противоположных направлениях от главной оси вращения, при этом тележка перемещается между первым наружным максимальным положением и вторым наружным максимальным положением, при этом первое главное плечо, измеренное нормально к главной оси вращения, длиннее второго главного плеча, и/или при этом главная ось вращения расположена ассиметрично по продольному продолжению главного несущего устройства относительно главного несущего устройства.
Изобретение относится, в частности, к устройству, например, к тренажеру, имитатору движения для пространственного перемещения по меньшей мере одного человека и, в частности, для имитации состояний ускорения, устройство содержит:
- (возможно, горизонтально ориентированное) главное несущее устройство, которое установлено с возможностью вращения, может быть приведено и предпочтительно приведено во вращение вокруг (возможно, вертикально ориентированной) главной оси вращения, при этом главное несущее устройство содержит первый участок и второй участок, которые продолжаются радиально наружу в противоположных направлениях от главной оси вращения; тележку, которая может перемещаться по траектории по главному несущему устройству и, в частности, по первому участку главного несущего устройства и второму участку главного несущего устройства, при этом траектория продолжается от первого максимального положения в зоне наружного конца первого участка главного несущего устройства через главную ось вращения до второго максимального положения в зоне наружного конца второго участка главного несущего устройства, и, в частности, продолжается по существу линейно, пересекая, полностью пересекая, или по существу пересекая главную ось вращения; удерживающее приспособление для размещения, усаживания или закрепления человека в зоне центра, при этом удерживающее приспособление присоединено к тележке посредством двигательного приспособления, причем первый участок главного несущего устройства выполнен длиннее второго участка главного несущего устройства и/или центр имеет большее нормальное расстояние от главной оси вращения в первом максимальном положении, чем во втором максимальном положении.
Ниже дополнительно обсуждаются примерные параметры, варианты и возможности изменения устройства согласно изобретению:
Устройство может быть выполнено таким образом, что возможно генерирование G-силы до 7 g или приблизительно 7 g, непрерывно действующей на человека. Достигаемое повышение или градиент непрерывно генерируемой G-силы в единицу времени может составлять приблизительно 3g/секунда, так что при вращении одного главного несущего устройства, человека можно ускорить от 1 g до 4 g за одну секунду и от 1 g до 7 g за две секунды.
Чтобы получить такие или подобные значения ускорения, нормальное расстояние первого наружного максимального положения центра, который находится в зоне человека, от главной оси вращения, составляет, например, приблизительно шесть метров. Расстояние второго наружного максимального положения центра от главной оси вращения составляет, например, приблизительно два метра.
Масса тележки составляет, например, от 8 до 16 тон, возможно до 12 тон. Максимальное радиальное ускорение, действующее на человека, может находиться в диапазоне 7 g, что, например, соответствует угловой скорости приблизительно от трех до четырех радиан/с при радиусе перемещения центра приблизительно в шесть метров.
Максимальная скорость тележки составляет, например, 2–5 м/с, предпочтительно, 3-4 м/с и в некоторых случаях около 3,2 м/с. Максимальное ускорение благодаря приводу тележки составляет приблизительно 5м/с2 при приблизительно 2,2 радиан/с (соответствующее приблизительно 3g при шестиметровом радиусе центра вокруг главной оси вращения). Во всех примерных вариантах перемещение тележки предпочтительно может иметь место против сил радиального ускорения, причем сила составляет до 7g. Устройство с такими параметрами может достигнуть искусственного ускорения, например, от 1g до 7g за две секунды.
Для приведения в действие различных компонентов устройства согласно изобретению, можно использовать различные способы запуска.
Подходящими приводными системами, которые можно использовать для приведения в действие тележки и, в частности, приводными устройствами тележки для перемещения тележки по главному несущему устройству, являются электрические или гидравлические приводы. Главным приводом, который выполнен с возможностью вращения главного несущего устройства, может быть также электрический или гидравлический привод.
Можно предусмотреть систему подачи электроэнергии, которая позволяет снизить пиковое значение электроэнергии, которая должна быть подана извне. При быстрых изменениях частоты вращения главного привода, например, потребность в электроэнергии во много раз выше, чем при стабильном режиме работы. Например, в случае способа с гидравлическим приводом предусмотрен резервуар высокого давления, который корректирует кратковременное максимальное потребление. В случае только электрического привода, может быть предусмотрена масса маховика и, в частности, масса маховика, которая присоединена с возможностью вращения к главному приводу или связана с главным приводом с возможностью поворота, чтобы справиться с максимальным потреблением электроэнергии.
В случае необходимости, главный привод может быть выполнен в виде электрического привода. Чтобы предусмотреть привод, множество электрических приводов, например, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20 или более приводов предпочтительно используется. Например, эти приводы имеют суммарную выходную мощность приблизительно 3-5 МВт. Максимальный генерируемый крутящий момент составляет, например, 1-3 МНм. Приводы входят в зацепление с главным несущим устройством, например, через зубчатое колесо или упорные кольца и, в частности, с центральным элементом, который присоединен к главному несущему устройству, чтобы запустить и привести во вращение главное несущее устройство вокруг его главной оси вращения.
В случае необходимости, главный привод может быть гидравлическим приводом. Максимальная мощность возможного гидравлического главного привода находится в диапазоне, например, 4-6 МВт при гидравлической мощности, например, приблизительно 10,600 л/мин и давлении, например, приблизительно, 300 бар.
Приводное устройство тележки, в случае необходимости, может быть выполнено в виде тросового привода. Такое приводное устройство тележки известно из заявки на патент WO2010/040505 A1. В этом примере тросового привода трос направлен вокруг множества отклоняющих роликов. В этом случае отклоняющие ролики главного несущего устройства установлены с возможностью вращения на главном несущем устройстве. Также имеется по меньшей мере один отклоняющий ролик, предпочтительно, два отклоняющих ролика, которые установлены с возможностью вращения на тележке. Также предпочтительно трос прикреплен одним концом или двумя концами к главному несущему устройству. Также предусмотрен ролик тросового привода. Ролик тросового привода предпочтительно расположен коаксиально главной оси вращения главного привода. Если предполагается, что тележка должна быть неподвижной, например, относительно главного несущего устройства, тогда ролики тросового привода и главный привод имеют одинаковую частоту вращения. При перемещении тележки по главному плечу ролики тросового привода и главный привод имеют разную частоту вращения. Это приводит к изменению длины отдельных участков троса, и тележка перемещается по главному несущему устройству. В этом случае привод ролика тросового привода может быть предусмотрен в фиксированном положении и, в частности, в основании.
В случае необходимости, приводное устройство тележки выполнено в виде гидравлического приводного устройства. В этом случае гидравлический цилиндр предусмотрен на главном несущем устройстве, этот цилиндр выполнен в виде привода для перемещения тележки по главному несущему устройству.
В случае необходимости, приводное устройство тележки выполнено в виде непосредственного привода и, в частности, в виде непосредственного привода с компенсацией радиальной нагрузки. Непосредственный привод содержит, например, ведущие колеса и/или зубчатые колеса, которые установлены на тележке таким образом, что они могут быть приведенными в действие и вращающимися. Предпочтительно, колеса катятся по участкам главного несущего устройства, чтобы осуществить перемещение тележки относительно главного несущего устройства. Приводы для колес, присоединенных к тележке, предпочтительно расположены на самой тележке.
Чтобы содействовать приведению в действие и перемещению тележки по главному несущему устройству даже при высоких радиальных ускорениях можно также предусмотреть устройство с компенсацией радиальной нагрузки в дополнение к непосредственному приводу. Если используется такая компенсация радиальной нагрузки, предусмотрен, например, привод с фиксированным положением, в частности, в основании. От этого привода один или более тяговых элементов продолжаются до тележки и, в частности, присоединены к тележке одним концом или канатной петлей. В случае необходимости тяговые элементы выполнены в виде тали. Тяговый элемент направлен или тяговые элементы направлены в главное несущее устройство в зону главной оси вращения. Тяговый элемент главным образом используется для компенсации радиального ускорения или частей радиального ускорения, в частности, для генерирования силы, противодействующей радиальному ускорению. Таким образом, в данном решении производится функциональное разделение между «удержанием» тележки с помощью устройства с компенсацией радиальной нагрузки и «перемещением» тележки с помощью непосредственного привода.
Во всех вариантах тележка предпочтительно направлена по главному несущему устройству. Такое направление можно осуществить, например, в виде комбинации направляющего рельса и скользящей направляющей, которая направлена по направляющему рельсу, при этом один из компонентов предпочтительно жестко соединен с тележкой, и один из компонентов – с главным несущим устройством. Тележка предпочтительно направлена по множеству положений на главном несущем устройстве. С этой целью можно предусмотреть множество направляющих рельсов и множество скользящих направляющих. В случае U-образной конструкции главного несущего устройства тележка может быть направлена в нижнюю зону и/или в зону дна U-образного несущего устройства. В дополнение, В случае U-образной конструкции главного несущего устройства тележка может быть направлена в центральную зону и/или в зону концов плечей U-образного несущего устройства. Предпочтительно, направляющие рельсы установлены на главном несущем устройстве по траектории и продолжаются от первого главного плеча через главную ось вращения до второго главного плеча.
В случае необходимости предусмотрено, что первое главное плечо и второе главное плечо свободно выступают от главной оси вращения или от центрального элемента. В этом варианте в наружной зоне главное несущее устройство предпочтительно не имеет направляющих приспособлений для создания опоры по отношению к окружающей среде. Однако, согласно дополнительному варианту направляющие приспособления для поддерживания и крепления выступающих частей главного несущего устройства могут быть предусмотрены в наружной зоне.
Устройство согласно изобретению также предпочтительно содержит удерживающее приспособление для человека, которое связано с тележкой через двигательное приспособление. Двигательное приспособление обеспечивает одну или более степеней свободы и, в частности, приводные степени свободы удерживающего приспособления относительно тележки. Удерживающее приспособление предпочтительно выполнено в виде сиденья, к которому человек может быть прикреплен ремнем. Рядом с сиденьем также предпочтительно предусмотрена имитация кабины объекта, подлежащего имитации. Также предпочтительно предусмотрены элементы управления, с помощью которых человек может осуществить управление по перемещению или по имитации.
Согласно предпочтительной конфигурации первая побочная ось соответствует оси крена. Вторая побочная ось может соответствовать оси рыскания. Третья побочная ось согласно данному варианту соответствует, например, поперечной оси. Согласно дополнительному варианту первая побочная ось соответствует оси рыскания. Вторая побочная ось может соответствовать поперечной оси. Согласно данному варианту третья побочная ось предпочтительно соответствует оси крена.
Предпочтительно предусмотрена кабина, которая окружает удерживающее приспособление и, следовательно, также человека, прикрепленного ремнем на удерживающем приспособлении. На или в этой кабине предпочтительно предусмотрена поверхность для воспроизведения изображений. Несущие элементы предпочтительно расположены таким образом, что они находятся вне поля человека в любое время и в любом положении.
В случае необходимости кабина может быть предусмотрена на втором или третьем несущем элементе или жестко присоединена к одному их этих несущих элементов. Это значит, что удерживающее приспособление имеет одну или две вращательные степени свободы относительно поверхности для воспроизведения изображений. В частности, первый несущий элемент выполнен таким образом, что он находится вне поля человека в каждом положении.
Кабина предпочтительно содержит закрываемое отверстие. Отверстие предпочтительно выполнено таким образом, что и человека, и кабину, которая может быть предусмотрена, можно легко удалить и установить. Для этой цели предусмотрена рельсовая система, которая облегчает направленное перемещение кабины, которая может быть предусмотрена.
В случае необходимости первый несущий элемент может быть выполнен дугообразной или С-образной формы. В случае необходимости первый несущий элемент может быть выполнен в виде изогнутой консоли. Второй несущий элемент может содержать, в случае необходимости, одно или более углублений для удержания одного или более приводов вращения. Этот привод или эти приводы, в частности, подходят для вращения удерживающего приспособления вокруг первой побочной оси и/или выполнены с возможностью вращения удерживающего приспособления вокруг первой побочной оси.
В случае необходимости второй несущий элемент может быть выполнен дугообразной или С-образной формы. В случае необходимости второй несущий элемент, который выполнен С-образной формы, может быть жестко прикреплен к кабине. Кабина может составлять часть второго несущего элемента.
В случае необходимости третий несущий элемент может быть выполнен кольцеобразной формы. Третий несущий элемент может содержать, углубления для удержания приводов вращения. Эти приводы вращения, в частности, подходят для вращения удерживающего приспособления вокруг первой побочной оси и/или выполнены с возможностью вращения удерживающего приспособления вокруг второй побочной оси и, в случае необходимости, третьей побочной оси.
Тележка может предпочтительно перемещаться по траектории в любые требуемые промежуточные положения между двумя максимальными положениями, где ее можно остановить относительно главного несущего устройства. Перемещение тележки также происходит во время вращения главного несущего устройства.
В случае необходимости во всех вариантах предусмотрено одно или более устройств обработки данных, например, компьютер. Они используются, например, для регулирования при разомкнутой цепи или для регулирования по замкнутому циклу приводов, и/или для отображения и/или расчета имитирующей модели.
Ниже изобретение будет описано дополнительно со ссылками на конкретные примерные варианты.
На Фиг. 1 показано устройство согласно изобретению с частичным разрезом, причем направление траектории тележки продолжается по существу в проекции изображения.
На Фиг. 2 показан частичный разрез устройства согласно изобретению, причем направление траектории тележки продолжается по существу в плоскости изображения.
На Фиг. 3 показан вид сверху устройства согласно изобретению.
На Фиг. 4 показан схематичный вид или вид в разрезе устройства согласно изобретению.
На Фиг. 5 показан другой схематичный вид или вид в разрезе устройства согласно изобретению.
На Фиг. 6 показана деталь устройства согласно изобретению.
На Фиг. 1 показан схематичный вид устройства согласно изобретению с частичным разрезом.
Устройство предпочтительно расположено на основании 37. Это основание 37 может быть, например, бетонным основанием.
Основание 37 имеет один или более присоединенных к нему приводов главного несущего устройства. Приводы 43 являются частями главного привода 35. Главный привод 35 выполнен с возможностью осуществления вращения главного несущего устройства 6 вокруг главной оси 7 вращения, и, в частности, чтобы привести во вращение главное несущее устройство 6 вокруг главной оси 7 вращения. С этой целью в настоящей конструкции главный привод 35 содержит зубчатые колеса, которые связаны или присоединены к приводам 43 главного несущего устройства, которые входят в зацепление в цепном колесе 44. Цепное колесо 44 предпочтительно жестко присоединено к главному несущему устройству 6 и, в частности, расположено коаксиально с главной осью 7 вращения. Когда приводы 43 главного несущего устройства запускаются, цепное колесо 44 приводится во вращение, которое также запускает главное несущее устройство 6. В случае необходимости, в дополнение или в качестве альтернативы зубчатым колесам, главный привод содержит упорные кольца, которые осуществляют передачу крутящего момента от привода 43 главного несущего устройства на главное несущее устройство 6 через упорные кольца. Во всех вариантах либо упорные колеса, зубчатые колеса, либо комбинация двух приспособлений можно использовать для запуска главного несущего устройства 6.
В зоне основания или между физически скрепленными компонентами устройства и главным несущим устройством 6, предпочтительно предусмотрен коренной подшипник 46. Этот коренной подшипник может быть выполнен, в частности, в виде радиального подшипника, упорного подшипника или комбинации этих двух типов подшипника или в виде множества подшипников, расположенных отдельно друг от друга. Коренной подшипник, в частности, подходит и/или выполнен с возможностью поддержания вращения главного несущего устройства 6 вокруг главной оси 7 вращения относительно физически скрепленных компонентов, в частности, относительно основания.
Устройство согласно изобретению содержит главное несущее устройство 6, которое, как показано в данном варианте, имеет дугообразную или U-образную форму. Однако, во всех вариантах главное несущее устройство может быть выполнено любой формы. Однако, в предпочтительной форме главное несущее устройство 6 имеет U-образный профиль по пути перемещения тележки. Тележка 5 предпочтительно установлена и/или направлена в этом U-образном профиле.
Устройство согласно изобретению предпочтительно содержит тележку 5. Эта тележка 5 может перемещаться по траектории 10 по главному несущему устройству 6 и быть приведенной во вращение. Предпочтительно тележка 5 направлена по главному несущему устройству 6 или на главном несущем устройстве 6. В случае U-образной конструкции главного несущего устройства 6, тележка может быть направлена в нижнюю зону, т.е., в зону дна U-образного главного несущего устройства 6, тележка также может быть направлена в центральную зону или на концы плечей U-образного главного несущего устройства 6. U-образная конструкция и многоточечное направление позволяет повысить стабильность всей системы.
Тележка может перемещаться относительно главного несущего устройства 6. Это значит, что тележка имеет две степени свободы. Одна степень свободы определена вращением главного несущего устройства 6 вокруг главной оси вращения. Дополнительная степень свободы определена перемещением тележки 5 по главному несущему устройству 6. Двигательное приспособление 4 предусмотрено на тележке 5. Двигательное приспособление 4 может перемещаться вместе с тележкой и, следовательно, имеет, по меньшей мере, такие же степени свободы, что и тележка. Двигательное приспособление является подходящим приспособлением и/или выполнено с возможностью перемещения удерживающего приспособления 2.
Это удерживающее приспособление 2, в частности, выполнено для фиксации или удержания человека 1 в зоне центра 3. Удерживающее приспособление 2 предпочтительно присоединено к первому несущему элементу 15. В настоящем варианте предусмотрена кабина 23. Предпочтительно, эта кабина окружает человека 1, удерживающее приспособление 2 и центр 3. В настоящем варианте кабина 23 также окружает первый несущий элемент 15, это значит, что компоненты, упомянутые в настоящем виде, скрыты и, следовательно, показаны пунктирной линией. Удерживающее приспособление 2 предпочтительно жестко или неподвижно присоединено к первому несущему элементу 15. Первый несущий элемент 15 расположен так, чтобы иметь возможность вращаться вокруг первой побочной оси 16 относительно тележки 5. Также предусмотрен второй несущий элемент 17. Второй несущий элемент 17 расположен так, чтобы иметь возможность вращаться вокруг второй побочной оси 18 относительно тележки. Первый несущий элемент 15 расположен так, чтобы иметь возможность вращаться вокруг первой побочной оси 16 относительно второго несущего элемента 17. Первая побочная ось 16 предпочтительно проходит через центр 3.
Также предпочтительно предусмотрен третий несущий элемент. Третий несущий элемент 19 расположен так, чтобы иметь возможность вращаться вокруг третьей побочной оси 20 относительно тележки. В настоящем виде третья побочная ось 20 продолжается в проекции изображения. Второй несущий элемент 17 предпочтительно расположен так, чтобы иметь возможность вращаться вокруг второй побочной оси 16 относительно третьего несущего элемента 19.
В случае необходимости также предусмотрено подъемное приспособление 21. Подъемное приспособление 21 позволяет поднимание и/или опускание удерживающего приспособления 2 относительно тележки 5. Направление поднимания/опускания предпочтительно продолжается параллельно главной оси вращения. Третий несущий элемент 19 предпочтительно расположен вокруг третьей побочной оси 20 относительно подъемного приспособления 21. Третий несущий элемент 19 также предпочтительно линейно перемещается относительно тележки посредством подъемного приспособления 21.
Возможно, что предусмотрен только первый несущий элемент и второй несущий элемент, причем первый несущий элемент расположен так, чтобы иметь возможность вращаться относительно второго несущего элемента. В случае необходимости в этом варианте второй несущий элемент может быть соединен с тележкой через подъемное приспособление 21.
Следовательно, в настоящем варианте Фиг. 1 удерживающее приспособление 2 имеет шесть степеней свободы, в частности, четыре вращательные степени свободы и две поступательные степени свободы. Три вращательные степени свободы определены вращением вокруг дополнительных осей 1, 6, 18 и 20. Дополнительная вращательная степень свободы определена вращением главного несущего устройства 6 вокруг главной оси 7 вращения. Поступательная степень свободы получена благодаря способности тележки 5 к перемещению по главному несущему устройству 6. Дополнительная вращательная степень свободы получена с помощью подъемного приспособления 21.
В случае необходимости можно предусмотреть больше или меньше степеней свободы.
На Фиг. 2 показано устройство такое же или подобное устройству на Фиг. 1. Основное несущее устройство 6 расположено так, чтобы иметь возможность вращаться вокруг главной оси 7 вращения. Главная ось вращения предпочтительно ориентирована вертикально. В дополнение также предпочтительно предусмотрено основание 37, в котором расположены или могут быть расположены, например, приводы или подшипники для перемещения устройства согласно изобретению. Детали привода скрыты на Фиг 2. Тележка 5 расположена таким образом, чтобы иметь возможность перемещаться по главному несущему устройству 6. Главное несущее устройство 6 предпочтительно содержит первое главное плечо 8 и второе главное плечо 9. Главные плечи 8 и 9 предпочтительно по существу радиально продолжаются наружу от главной оси 7 вращения. Предпочтительным образом два главных плеча 8, 9 линейно связаны друг с другом, создавая траекторию 10 тележки 5 на главном несущем устройстве 6. Однако, в случае необходимости во всех вариантах траектория 10 может быть выполнена слегка изогнутой или частично изогнутой. Во всех вариантах предпочтительно расположить траекторию 10 линейно по несущему устройству. При перемещении тележки 5 по траектории 10, центр 3 можно переместить от первого наружного максимального положения 11 во второе наружное максимальное положение 12. Таким образом, траектория 10 продолжается от первого наружного максимального положения 11 центра во второе наружное максимальное положение 12 центра 3 и, в частности, ограничивается двумя наружными максимальными положениями во всех вариантах. В первом наружном максимальном положении 11 тележка 5 предпочтительно расположена на первом главном плече 8 и, в частности, в наружной зоне первого главного плеча 8. Во втором наружном максимальном положении центра 3 тележка 5 расположена на втором главном плече 9 и, в частности, в наружной зоне второго главного плеча 9. На чертеже это альтернативное положение представлено пунктирной линией. Согласно изобретению предусмотрено, что первое нормальное расстояние 13 центра 3 от главной оси 7 вращения в первом наружном максимальном положении 11 больше, чем второе нормальное расстояние 14 между главной осью 7 вращения и центром 3 во втором наружном максимальном положении 12.
Возможны случаи, когда размер 47 первого главного плеча 8 больше размера 48 второго главного плеча 9.
При постоянной угловой скорости главного плеча радиальное ускорение, действующее на человека 1, можно изменять благодаря тому, что центр 3 выталкивается наружу по траектории. Поскольку максимальный радиус центра 3 на первом главном плече 8 больше максимального радиуса центра 3 на втором главном плече 9, при перемещении тележки 5 по первому главному плечу 8 при постоянной угловой скорости, можно вызвать более высокое радиальное ускорение, чем радиальное ускорение на втором главном плече. Во всех вариантах тележку 5 можно переместить в любое нужное промежуточное положение между двумя максимальными положениями 11, 12.
Устройство, представленное на Фиг. 2, в частности, может быть выполнено таким же образом, что и устройство на Фиг. 1. В частности, степени свободы удерживающего приспособления 2 относительно окружающей среды могут быть также выполнены такими же, что и в описании к Фиг. 1. В частности, в варианте, представленном на Фиг. 2, также предпочтительно получены шесть степеней свободы. Однако, в случае необходимости удерживающее приспособление 2 или человек 1 могут также иметь меньше или больше степеней свободы в отношении окружающей среды.
На Фиг. 3 показано сверху устройство согласно изобретению или система согласно изобретению. Устройство содержит главное несущее устройство 6. Это главное несущее устройство 6 установлено с возможностью вращения вокруг главной оси 7 вращения и предпочтительно приведено или может быть приведено в действие. В данном виде главная ось 7 вращения продолжается в проекции изображения.
Главное несущее устройство 6 предпочтительно имеет первое главное плечо 8 и второе главное плечо 9. Два главных плеча 8, 9 выступают с двух сторон главной оси 7 вращения или продолжаются от этой главной оси 7 вращения. Главное несущее устройство 6 предпочтительно выполнено таким образом, что первое главное плечо 8 и второе главное плечо 9 соединены друг с другом по прямой линии. Тележка 5 установлена на главном несущем устройстве 6. Тележка 5 может перемещаться по траектории 10 по главному несущему устройству 6.
В частности, траектория 10 продолжается по главному несущему устройству 6 от первого главного плеча 8 позади главной оси 7 вращения до второго главного плеча 9. Следовательно, тележка 5 может перемещаться от первого главного плеча 8 на второе главное плечо 9. Во всех вариантах тележка 5 может предпочтительно перемещаться из зоны главной оси 7 вращения с двух сторон. Двигательное приспособление 4 предусмотрено на тележке 5. Двигательное приспособление 4 может, в частности, соответствовать двигательным приспособлениям других вариантов. При использовании двигательного приспособления 4, удерживающее приспособление 2 для человека 1, два элемента 2, 1, не показанные в настоящем виде, могут вращаться или перемещаться относительно тележки 5 и окружающей среды.
В частности, двигательное приспособление содержит первый несущий элемент 15, второй несущий элемент 17 и, возможно, третий несущий элемент 19. Эти три несущих элемента 15, 17, 19 могут, в случае необходимости, вращаться вокруг побочных осей, 16, 18, 20. Также предпочтительно предусмотрено подъемное приспособление 21. С помощью подъемного приспособления 21 удерживающее приспособление 2 или человек 1 могут перемещаться поступательно относительно главного несущего устройства 6. В частности, направление перемещения подъемного приспособления 21 происходит параллельно главной оси 7 вращения.
Предпочтительно предусмотрена кабина 23. Удерживающее приспособление 2 предусмотрено в кабине 23. Удерживающее приспособление 2 подходит и/или выполнено с возможностью позиционирования или удержания человека 1 в зоне центра 3. Центр 3 может перемещаться по траектории 10 активизацией тележки 5.
В частности, центр 3 может перемещаться от первого наружного максимального положения 11 до второго наружного максимального положения 12. Первое нормальное расстояние 13 центра от главной оси 7 вращения предпочтительно больше, чем второе нормальное расстояние 14 второго наружного максимального положения 12 от главной оси 7 вращения. Это позволяет перемещать центр дополнительно наружу по первому главному плечу 8, чем по второму главному плечу 9. В случае необходимости, все главное несущее устройство может быть расположено симметрично. При такой конструкции размер 47 первого главного плеча 8 больше размера 48 второго главного плеча 9. Каждый размер 47, 48 продолжается по существу нормально от главной оси 7 вращения до наружного конца первого или второго главного плеча или главного несущего устройства.
На Фиг. 3 предусмотрено приводное устройство 30 для перемещения тележки 5. Приводное устройство 30 тележки выполнено в виде тросового привода в данном варианте. В таком устройстве трос 33 протягивается вокруг множества отклоняющих роликов 32. Также трос 33 протягивается вокруг ролика 34 тросового привода. При вращении ролика 34 тросового привода трос или участки троса могут перемещаться, также перемещая тележку 5 по главному несущему устройству 6. Для этой цели предусмотрен привод 36. Этот привод 36 предпочтительно находится в фиксированном положении.
В случае необходимости, однако, этот привод 36 или части привода 36 также могут быть предусмотрены на главном несущем устройстве. Отклоняющий ролик 32 может быть выполнен в виде натяжного ролика. Этот натяжной ролик выполнен с возможностью удержания кабины под натяжением в каждом рабочем положении. На этом виде натяжным роликом является ролик, который расположен ближе всего к ролику 34 тросового привода. Тросовый привод следующего варианта также содержит множество отклоняющих роликов 31 главного несущего устройства. Отклоняющие ролики 31 главного несущего устройства предпочтительно расположены на главном несущем устройстве 6 с возможностью вращения. Дополнительно, отклоняющие ролики расположены на тележке 32 с возможностью вращения.
Трос 33 или тросы 33 протягиваются по всем роликам, показанным на чертеже. Трос предпочтительно прикреплен к одному или более участкам главного несущего устройства 6. Путем активизации ролика 34 тросового привода, в частности, посредством привода 36 ролика 34 тросового привода, тележка 5 может перемещаться по главному несущему устройству путем изменения длины участков троса или петель троса.
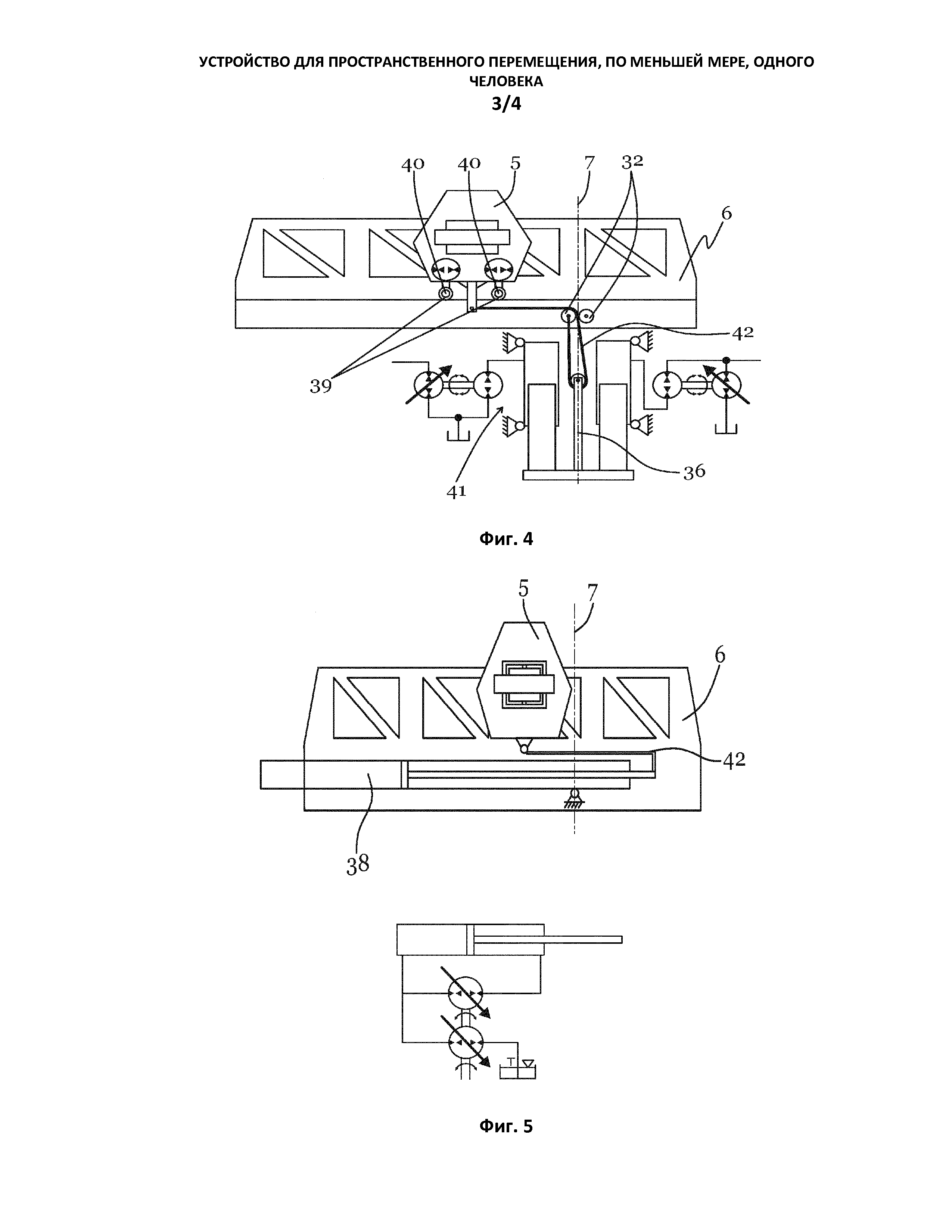
На Фиг. 4 показана дополнительная конфигурация устройства согласно изобретению. В противоположность Фиг. 3, чтобы переметить тележку 5 по главному несущему устройству 6, приводное устройство 30 тележки содержит одно или более ведущих колес 39, которые катятся по элементу главного несущего устройства 6. Все другие компоненты соответствуют компонентам Фиг.1, Фиг.2 или Фиг. 3, в случае необходимости. Ведущие колеса 39 предпочтительно содержат один или более приводов 40. Приводы 40 подходят и/или выполнены с возможностью приведения в действие ведущего колеса 39 или ведущих колес 39 и, следовательно, осуществления перемещения тележки 5 по главному несущему устройству 6. Приводы 40, в случае необходимости, могут располагаться на тележке или перемещаться вместе с тележкой.
При высоких радиальных ускорениях, чтобы поддерживать перемещение тележки посредством ведущих колес 39, может возникнуть необходимость в наличии другого привода. Согласно настоящему варианту, этот дополнительный привод выполнен в виде привода 41 с компенсацией радиальной нагрузки. Привод 41 с компенсацией радиальной нагрузки предпочтительно содержит тяговый элемент 42, который присоединен к тележке 5 и/или входит в зацепление с тележкой 5. Тяговый элемент 42 приводится в действие приводом 36.
В случае необходимости тяговый элемент 42 выполнен в виде тали.
В случае необходимости привод 41 с компенсацией радиальной нагрузки содержит тали. Тяговый элемент 42 предпочтительно выполнен в виде гибкого тягового элемента, например, в частности, троса. Тяговый элемент 42 предпочтительно направлен в главное несущее устройство 6 в зону главной оси 7 вращения. В зоне, где тяговый элемент 42 протягивается через главное несущее устройство 6, также предусмотрены отклоняющие ролики 32. Отклоняющие ролики 32 отклоняют тяговый элемент от предпочтительно фиксированного привода, чтобы участок тягового элемента 42 мог войти в зацепление с тележкой 5. Это значит, что тяговый элемент 42 содержит участок, который предусмотрен между тележкой и отклоняющим роликом 32. Этот участок продолжается по существу под косым углом или предпочтительно горизонтально. Между приводом тягового элемента 42 и отклоняющим роликом 32 предусмотрен второй участок тягового элемента 42. Этот участок продолжается по существу под косым углом и предпочтительно вертикально.
Конфигурация непосредственного привода с использованием одного или более ведущих колес 39 и привода 41 с компенсацией радиальной нагрузки приводит к разделению сил между «удержанием» тележки против сил радиального ускорения посредством привода 41 с компенсацией радиальной нагрузки, и «перемещением» тележки по главному несущему устройству 6 посредством приводных ведущих колес 39.
На Фиг. 5 показан дополнительный вариант возможного приводного устройства 30 и гидравлической схемы данного варианта. Приводное устройство 30 тележки варианта, представленного на Фиг. 5, содержит гидравлический цилиндр 38, который может быть выполнен, в случае необходимости, в виде обычного гидравлического цилиндра 38, имеющего соответствующие размеры. Все другие компоненты соответствуют компонентам Фиг.1, Фиг.2 или Фиг. 3, в случае необходимости. Гидравлический цилиндр 38 предусмотрен на главном несущем устройстве 6 и, в частности вращается вместе с ним вокруг главной оси 7 вращения. Изменение длины гидравлического цилиндра 38 позволяет тяговому элементу 42 перемещаться. Этот тяговый элемент 42 входит в зацепление с тележкой 5, чтобы перемещать тележку по главному несущему устройству 6. В случае необходимости тяговый элемент 42 может быть выполнен в виде элемента давления.
В случае необходимости тяговый элемент может быть штангой, которая выполнена в виде двухтактного элемента. В случае необходимости тяговый элемент 42 может быть выполнен в виде троса.
Можно предусмотреть множество гидравлических цилиндров 38, которые действуют друг против друга и, следовательно, повышают способность перемещать тележку по главному несущему устройству. Однако, в случае необходимости, предусмотрен только один гидравлический цилиндр 38, который может перемещать тележку по первому главному плечу и второму главному плечу и, в частности, от первого максимального положения центра до второго максимального положения центра.
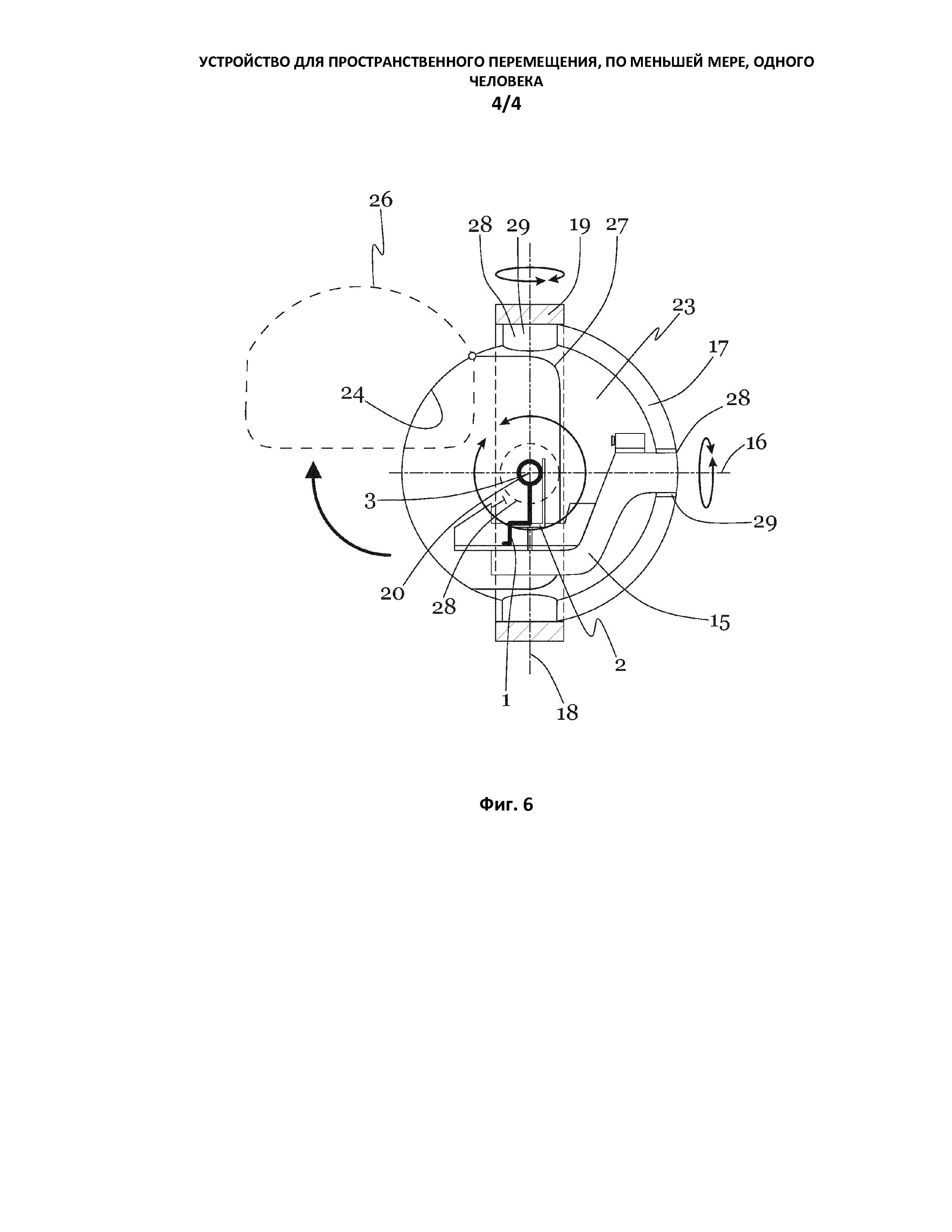
На Фиг. 6 в схематичном виде показана дополнительная деталь конструкции устройства согласно изобретению. В случае необходимости двигательное приспособление 4 и кабина 23 выполнены во всех вариантах, как показано на Фиг. 6. В настоящем варианте кабина 23 содержит дверь 26. Дверь 26 кабины может быть выполнена так, что она может открываться и закрываться. Дверь кабины закрывает отверстие 27 кабины в случае необходимости. Предпочтительно выполнить дверь 26 кабины так, чтобы дверь дополняла форму кабины. Например, кабина может иметь сферическую форму или сферическую внутреннюю поверхность.
В частности, поверхность 24 для воспроизведения изображения предусмотрена на внутренней стороне кабины. Поверхность для воспроизведения изображений продолжается по всему визуальному полю или полю зрения человека 1. В случае необходимости предусмотрен проектор или множество проекторов, посредством которых изображения, в частности, изображения имитированной окружающей среды, искусственно генерируемые компьютером, можно проецировать на поверхность 24 для воспроизведения изображений.
Человек 1 удерживается на удерживающем приспособлении 2. Удерживающее приспособление выполнено, например, в виде сиденья или кресла. Предпочтительно, удерживающее приспособление содержит ремни, чтобы пристегнуть человека 1 к удерживающему приспособлению 2. В частности, удерживающее приспособление выполнено с возможностью позиционирования человека 1 в зоне центра 3. Во всех вариантах голова человека предпочтительно расположена в центре. В случае необходимости, во всех вариантах грудная клетка или сердце человека могут быть расположены в центре 3. Предпочтительно, удерживающее приспособление 2 содержит регулируемую степень свободы относительно первого несущего элемента 15. Эта степень свободы определяется, например, регулированием сиденья.
В частности, может возникнуть необходимость в наличии средства регулирования удерживающего приспособления относительно первого несущего элемента 15, чтобы предусмотреть средство для позиционирования человека 1 относительно центра. Удерживающее приспособление может вращаться вместе с первым несущим элементом вокруг первой побочной оси 16. Такое вращение первого несущего элемента вокруг оси 16 вращения имеет место, в частности, относительно второго несущего элемента 17. В настоящем варианте первый несущий элемент 15 выполнен в виде консоли или в виде криволинейного консольного выступающего носителя. В задней зоне, в частности, позади человека 1 первый несущий элемент 15 направлен относительно второго несущего элемента 17 и может быть установлен на нем или в нем с возможностью вращения. В дополнение, привод 29 вращения предусмотрен для вращения первого несущего элемента относительно второго несущего элемента. В настоящем варианте второй несущий элемент 17 по существу выполнен С-образной формы. В случае необходимости, второй несущий элемент является частью кабины 23. Кабина 23 может иметь крепящий эффект для второго несущего элемента 17. В случае необходимости, второй несущий элемент 17 может иметь углубление 28. В этом углублении может быть предусмотрен привод 29 вращения и, в случае необходимости, подшипник для вращения первого несущего элемента относительно второго несущего элемента. Второй несущий элемент 17 выполнен с возможностью вращения относительно третьего несущего элемента 19. В частности, вращение происходит вокруг второй побочной оси 18. Третий несущий элемент выполнен, например, кольцеобразной формы и может продолжаться как раз вокруг кабины 23. На данном рисунке главными частями кольца, которые можно видеть, являются площади сечения.
Третий несущий элемент 19 предпочтительно выполнен с возможностью вращения вокруг третьей побочной оси 20 относительно тележки. На данном чертеже третья побочная ось 20 продолжается в проекции изображения. Чтобы вращать второй несущий элемент 17 или третий несущий элемент 19, в третьем несущем элементе 19 предусмотрено больше одного, и по меньшей мере два привода 29 вращения. Приводы 29 вращения могут быть предусмотрены, в частности, в углублениях третьего несущего элемента. Предпочтительно, три побочные оси 1, 6, 18, 20 имеют кратчайшее нормальное расстояние друг от друга в зоне центра 3. Предпочтительно, три побочные оси 1, 6, 18, 20 пересекаются в центре 3. В настоящем варианте первая побочная ось соответствует оси крена человека 1. Человек 1 и, в частности, удерживающее приспособление, могут иметь вращательную степень свободы относительно кабины 23 и, в частности, относительно поверхности 24 для воспроизведения изображения, которая предпочтительно является качающейся вращательной степенью свободы.
В настоящем варианте вторая побочная ось 18 предпочтительно соответствует оси рыскания. Третья побочная ось 20 соответствует поперечной оси. Однако, при вращении человека, например, на 90° вокруг первой побочной оси вторая побочная ось и третья побочная ось меняют ориентацию относительно человека, так что вторая побочная ось соответствует поперечной оси, а третья побочная ось соответствует оси рыскания.
Номера позиций на чертежах
1 человек
2 удерживающее приспособление
3 центр
4 двигательное приспособление
5 тележка
6 главное несущее устройство
7 главная ось вращения
8 первое главное плечо
9 второе главное плечо
10 траектория
11 первое наружное максимальное положение
12 второе наружное максимальное положение
13 первое нормальное расстояние
14 второе нормальное расстояние
15 первый несущий элемент
16 первая побочная ось
17 второй несущий элемент
18 вторая побочная ось
19 третий несущий элемент
20 третья побочная ось
21 подъемное приспособление
22 линейный привод
23 кабина
24 поверхность для воспроизведения изображений
25 элемент управления
26 дверь кабины
27 блокируемое отверстие кабины
28 углубления
29 привод вращения
30 приводное устройство тележки
31 отклоняющий ролик главного несущего устройства
32 отклоняющий ролик
33 трос
34 ролик тросового привода
35 главный привод
36 привод для ролика тросового привода
37 основание
38 гидравлический цилиндр
39 ведущее колесо
40 привод для ведущего колеса
41 привод с компенсацией радиальной нагрузки
42 тяговый элемент
43 привод главного несущего устройства
44 цепное колесо
45 упорное кольцо
46 коренной подшипник
47 размер первого главного плеча
48 размер второго главного плеча
Реферат
Изобретение относится к устройству для пространственного перемещения по меньшей мере одного человека и, в частности, для имитации условий ускорения или последовательностей ускорения. Устройство для пространственного перемещения по меньшей мере одного человека содержит удерживающее приспособление для удержания человека в зоне центра. Удерживающее приспособление установлено на тележке посредством двигательного приспособления. Тележка может линейно перемещаться по горизонтально ориентированному главному несущему устройству. Главное несущее устройство приведено во вращение вокруг вертикально ориентированной главной оси вращения. Центр перемещается между первым наружным максимальном положением и вторым наружным максимальном положением перемещением тележки по траектории на главном несущем устройстве. При этом нормальное расстояние между первым наружным максимальным положением центра и главной осью больше нормального расстояния между вторым наружным максимальным положением центра и главной осью. Повышается качество подготовки. 2 н. и 35 з.п. ф-лы, 6 ил.
Комментарии