Исполнительное устройство на основе упругого элемента - RU172799U1
Код документа: RU172799U1
Чертежи
Описание
Предлагаемая полезная модель относится к области машиностроения, а именно к механическим исполнительным устройствам или передачам, и может быть использована для преобразования прикладываемой силы в поступательное движение посредством упругого элемента.
Известен мобильный механизм для преобразования приложенной силы в поступательное движение [патент CN 101172203 В, Int. Cl A63G 19/10, дата приоритета 26.09.2007, дата публикации 08.12.2010]. Данное устройство выполнено в виде подвижно связанных групп кинематических пар, которые спроектированы таким образом, что при воздействии внешней силы на входной элемент конструкции происходит передача энергии подвижным элементам, выполненным в виде направляющих, с одной стороны подвижно закрепленных с каркасом устройства, с другой - имеющих вращающиеся ролики, с помощью фрикционных колес, которые сообщают данным исполнительным подвижным элементам вращающий момент, позволяющий совершить короткое вращательное движение, с целью перемещения подвижного основания (нижнего края подвижного элемента, оборудованного роликами) относительно кинематического узла, что, в свою очередь, приводит к поступательному движению всего механизма. К недостаткам данного устройства можно отнести сложность конструкции и потери энергии за счет фрикционного сопротивления, возникающих в кинематических узлах.
Известен биомеханический механизм, имитирующий походку животного [патент CN 2734289Y, Int. Cl A63G 19/14, дата приоритета 30.09.2004, дата публикации 19.10.2005]. Данное устройство наиболее близкое по предполагаемому решению и является прототипом предложенной полезной модели для преобразования приложенной силы в поступательное движение, в которой в качестве рабочего тела используется упругий элемент. Данное устройство включает в состав входной элемент конструкции, который используется для преобразования с помощью подвижно связанных групп кинематических пар приложенной силы во вращающий момент, действующий на подвижные направляющие, с одной стороны, закрепленные с помощью шарнирного соединения каркасом, а с другой - оборудованные роликами, вращающимися вокруг собственной оси, для преобразования вращательного движения в поступательное. Также конструкция данного устройства включает упругие элементы, выполненные в виде пружины, для обеспечения противодействующей силы, необходимой для возвращения входного элемента в начальное положение и обеспечения циклического перераспределения действующих сил. Данное устройство спроектировано таким образом, что при циклических воздействиях силы на верхний входной элемент за счет упругих свойств пружин, входящих в состав устройства, происходит перераспределение приложенной нагрузки во вращающий момент, действующий на нижние элементы конструкции, посредством шатуна, за счет чего происходит вращательное движение направляющих (ног), имеющих на незакрепленном крае ролики, которые обеспечивают поступательное движение данного устройства. Недостатками вышеприведенного устройства можно считать следующие: сложность конструкции, множество соединительных узлов, вносящих значительное фрикционное сопротивление всего механизма, а также зависимость скорости и расстояния перемещения от времени и импульса воздействия прикладываемой силы.
Решается задача упрощения конструкции за счет уменьшения количества соединительных узлов.
Это достигается тем, что заявляемое в качестве полезной модели исполнительное устройство на основе упругого элемента содержит жесткий каркас, конструктивно состоящий из шарнирно соединенных между собой фронтальной и задней частей, причем фронтальная часть представляет собой подвижное основание, состоящее из жестко закрепленных направляющих, оборудованных четырьмя подвижными опорами, расположенными на нижних свободных концах направляющих и имеющими храповой механизм, задняя часть состоит из плоской площадки и исполнительного элемента, выполненного в виде упругого стержня круглого сечения, который крепится перпендикулярно плоской площадке, также в конструкции предусмотрен возвратный механизм для плоской площадки, выполненный в виде пружины сжатия.
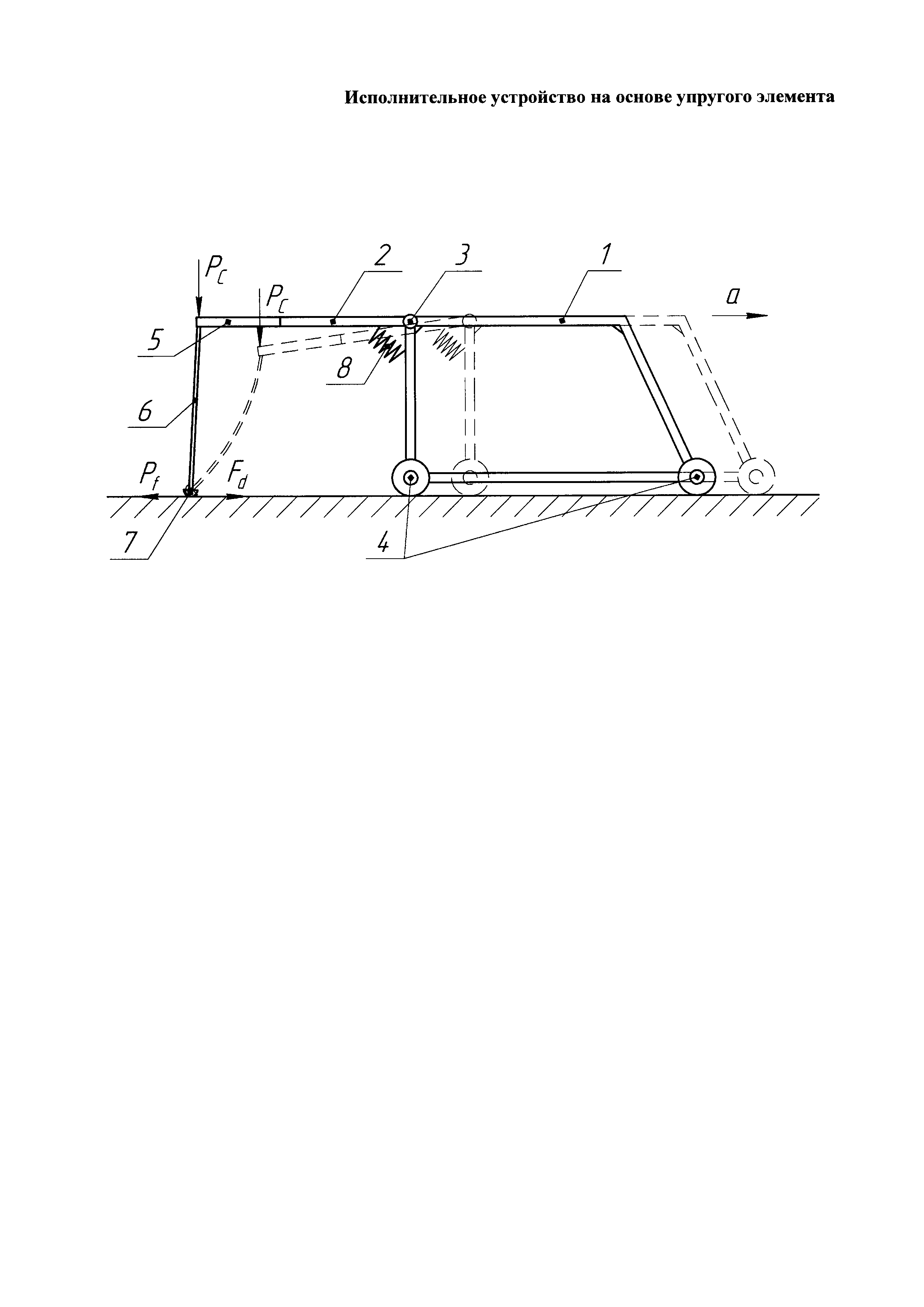
Сущность поясняется фигурой, где показана схема предложенного устройства, пунктиром изображена установка в процессе функционирования. Конструктивно каркас исполнительного устройства состоит из двух основных частей: фронтальной 1 и задней 2, соединенных между собой с помощью шарнирного узла 3. Фронтальная часть 1 выполнена из жестко соединенных между собой направляющих и представляет собой подвижное основание. Подвижное основание снабжено четырьмя подвижными опорами, расположенными на нижних свободных концах направляющих фронтальной части 1. Подвижные опоры выполнены в виде роликов или колес 4, которые оборудованы храповым механизмом, обеспечивающим вращение только в одну сторону. Конструктивно задняя часть 2 состоит из плоской площадки 5 с жестко закрепленным, направленным перпендикулярно плоскости плоской площадки 5 упругим элементом, выполненным в виде стержня 6, имеющем на свободном конце полусферический опорный наконечник 7. Плоская площадка 5 предназначена для передачи действия внешней силы на упругий стержень 6. Также в конструкции предусмотрена пружина сжатия 8, играющая роль возвратного механизма для плоской площадки 5.
Функционирование полезной модели происходит следующим образом. В начальный момент времени в области сопряжения плоской площадки 5 и упругого стержня 6 прикладывается сила Pc, направленная вертикально вниз вдоль продольной оси стержня. Для обеспечения потери устойчивости упругого стержня 6 необходимо, чтобы величина данной силы была равна или превышала величину критической силы Ркр (т.е. Pс≥Ркр), которая определяется уравнением
где E⋅J - изгибная жесткость, которая представляет собой произведение модуля Юнга упругости материала E на момент инерции поперечного сечения J;
R - длина упругого стержня.
Под действием приложенной силы Pс (при условии, что Рс≥Ркр) происходит изгиб вдоль продольной оси и потеря устойчивости упругого стержня, вследствие чего появляются движущая сила Fd в паре с силой трения Pƒ. В момент времени, когда Fd>Рƒ, происходит прямолинейное перемещение всего устройства вдоль основания с ускорением а, причем
где Fd - движущая сила;
М - общая масса устройства.
Таким образом, предполагаемое устройство, по сравнению с прототипом, обеспечивает более простую конструкцию, позволяющую исключить количественную зависимость поступательного движения от импульса прикладываемой силы путем использования исполнительного элемента, выполненного в виде упругого стержня круглого сечения.
Реферат
Полезная модель относится к области машиностроения и предназначена для преобразования прикладываемой силы в поступательное движение. Исполнительное устройство на основе упругого элемента имеет конструкцию, состоящую из небольшого количества кинематически соединенных элементов, и преобразует приложенную силу в поступательное движение механизма, направленное перпендикулярно ее действию, под влиянием энергии, образованной в процессе потери устойчивости исполнительного элемента, выполненного в виде упругого стержня круглого сечения. Техническим результатом предполагаемой полезной модели является упрощение конструкции и исключение количественной зависимости поступательного движения от импульса прикладываемой силы. 1 ил.
Комментарии