Безрельсовое транспортное средство аттракциона для катания dark ride, система и способ - RU2591549C2
Код документа: RU2591549C2
Чертежи









Описание
[0001] Настоящая заявка притязает на приоритет предварительной заявки США № 61/484942, поданной 11 мая 2011 г., содержание которой включено в данную заявку путем ссылки для любых целей, как если бы она была полностью представлена здесь.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к многоместным транспортным средствам, используемым в аттракционах для катаниях парка развлечений. Конкретнее, транспортное средство работает от аккумулятора и включает в себя элементы, позволяющие пассажирам ощущать движение с тремя степенями свободы (рыскание, тангаж и крен) при одновременном движении вдоль предопределенного маршрута, который проходит транспортное средство автономно без использования механического пути или провода, протянутого вдоль маршрута.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0003] Транспортные средства для аттракционов для катания парка развлечений существовали в течение долгого времени. Самые ранние транспортные средства передвигались по путям. Эти транспортные средства были громкими из-за ударов металла о металл колес на путях. Аттракционы для катания, использующие эти транспортные средства, не подлежали изменениям из-за трудности удаления, изменения конфигурации и переустановки путей. Дополнительно, эти транспортные средства не имели автономного питания. Каждое транспортное средство или ряд транспортных средств могли быть соединены с веревкой, цепью или кабелем, которые проходили по непрерывному контуру через весь аттракцион. Перемещение веревки, цепи или кабеля также вызывало нежелательный шум. Более того, само существование веревки, цепи или кабеля представляло физическую угрозу (из-за отсоединения или запутывания) любому человеку, нарушающему технику безопасности транспортного средства для катания, и самими операторами аттракциона для катания.
[0004] Инновация, примененная к самым ранним транспортным средствам, пришла в виде бортового электродвигателя, который питался от внешнего источника питания. Для передачи электрической энергии электродвигателю транспортные средства, двигающиеся по путям, использовали "третий рельс", который проходил между или сбоку от путей обычно на заданном постоянном расстоянии от пути. Проводящие металлические щетки или башмаки, выступающие из транспортного средства, создавали контакт с третьим рельсом. Электрическая энергия обычно проходила от третьего рельса к электродвигателю транспортного средства через щетки или башмаки и возвращалась к земле через металлическое колесо транспортного средства, создающее контакт с заземленным металлическим путем аттракциона для катания. Электрические транспортные средства этого типа представляли серьезную опасность поражения электрическим током посетителя, если посетитель покидал транспортное средство для катания и спотыкался об электрифицированный третий рельс. Дополнительно, электрические транспортные средства этого типа еще были связаны с проблемами пути и всем остальным, что связанно с ним.
[0005] Не все электрические транспортные средства для катания связаны с путями. Транспортные средства, например, "бамперные машины", которые управляются пассажиром, обычно получают электрическую энергию через щетку или одножильный провод, задевающий электрифицированную сетку, размещенную над аттракционом для катания. Электрический ток возвращался к земле через подобные контакты или металлические ролики непосредственно к цельнометаллическому полу аттракциона для катания. Электрические транспортные средства этого типа также представляют серьезную опасность поражения электрическим током посетителя, если посетитель вступил в контакт с ненадлежаще изолированным полюсом (поддерживающим контакт, задевающий электрифицированную сетку над аттракционом для катания) и землей одновременно. Более того, эти транспортные средства обычно представляли проблему отсутствия элементов обеспечения безопасности, которые могли отключать одно или все транспортные средства аттракциона для катания, если посетитель должен был покинуть транспортное средство во время поездки. Подобное отсутствие элементов обеспечения безопасности было представлено в электрифицированных транспортных средствах, двигающихся по путям.
[0006] Инновации, относящиеся к электропитанию транспортных средств, освободили некоторые транспортные средства от путей. Например, корпорация Disney Enterprises ввела транспортное средство для катания, питающееся от аккумулятора, в 1982 г. в ее павильоне "Universe of Energy" в тематическом парке EPCOT®. Источник "The World According to Jack", http://land.allears.net/blogs/jackspence/2010/10/universe_of_energy_1.html (последнее посещение 8 мая 2012г.). В этом аттракционе для катания посетители "перевозились через павильон в больших питающихся от аккумулятора транспортных средствах, относящихся к типу "машины движущегося театра (traveling theatre cars)", которые следовали за направляющими проводами, встроенными в пол, в отличие от передвижения вдоль традиционных путей аттракциона для катания". Источник "Wikipedia", http://en.wikipedia.org/wiki/Universe_of_Energy (последнее посещение 17 апреля 2012 г.). Этот тип аттракциона для катания имеет две проблемы в области транспортных средств для катания.
[0007] Во-первых, перемещение больших транспортных средств, работающих от аккумулятора, потребляет большое количество энергии. Хранение большого количества энергии требует большого количества перезаряжаемых аккумуляторов. Для транспортных средств павильона "Universe of Energy" "каждое транспортное средство несет восемь автомобильных аккумуляторов. Разумеется, эти аккумуляторы необходимо часто подзаряжать, поэтому внутри двух поворотных платформ аттракциона находятся "зарядные пластины", которые содержат электромагниты. Магниты работают в сочетании со встроенными магнитами, которые создают электрический ток, передаваемый аккумуляторам транспортного средства". Источник "The World According to Jack", как указано выше. Считается, что соотношение количества времени, которое этот тип транспортного средства проводит на его зарядной станции (например, поворотной платформе), и количества времени, которое транспортное средство проводит, двигаясь своим ходом, больше единицы. Соответственно, аккумуляторы транспортного средства медленно заряжаются в течение длительного периода времени относительно времени, когда транспортное средство находится в движении.
[0008] Во-вторых, транспортные средства, которые используют направляющие провода, встроенные в пол, подобно транспортным средствам, которые передвигаются по путям, не поддаются изменениям конфигурации траектории перемещения транспортного средства из-за трудности удаления, изменения конфигурации и переустановки проводов. Более того, точно также, как по путям, транспортное средство, следующее за направляющим проводом должно оставаться на направляющем проводе, в связи с этим, оно в итоге должно возвращаться на место, с которого оно начало его поездку, и не может без труда, если вообще это случится, следовать траектории, которая пересекает его собственную.
[0009] Конструкторы современных аттракционов для катания сталкиваются еще и с другими проблемами. Посетителей больше не устраивает простое передвижение через аттракцион при поддержании одной плоскости перемещения. Посетители могут пожелать ощущать движение рыскания (т.е. вращение в плоскости x-y), движение тангажа (т.е. подъем и падение), движение крена (продольное колебание влево и вправо) и вертикальную качку (вертикальное движение вдоль оси z). Существуют узлы движения, которые обеспечивают эти четыре степени свободы движения, чтобы перемещать посетителей; однако из-за очень большого расхода энергии (вызываемого необходимостью передвижения платформы, которая поддерживает вес заданного числа посетителей, через пространство в этих направлениях) известные узлы движения для обеспечения четырех степеней свободы соединены с неподвижными блоками электропитания. Это ограничивает установку известных узлов движения либо на неподвижных местах, либо на креплениях на путях, которые используют электрическое соединение, относящееся к типу "третий рельс", для подачи энергии узлу движения. Первая ситуация является проблематичной по меньшей мере потому, что посетители обычно ограничены одним помещением (которое может совершать движение рыскания, крена, тангажа и вертикальной качки), в то время как изображения проецируются на стенах внутри помещения. Последняя ситуация является проблематичной по меньшей мере потому, что посетители сталкиваются со всеми теми же проблемами, с которыми сталкивались посетители более старых транспортных средств для катания, которые были ограничены передвижением по путям; дополнительно имеется опасность поражения электрическим током, если посетитель должен покинуть транспортное средство для катания и спотыкается об электрифицированный третий рельс.
[0010] Существуют еще и другие проблемы относительно движений известных транспортных средств. Например, в уровне техники отсутствуют транспортные средства, которые могут двигаться с отклонениями из стороны в сторону, то есть передвигаться в линейно-диагональном направлении под заданным углом, например, 45°, при том, что транспортное средство обращено вперед под углом 0°. Дополнительно, известные транспортные средства обычно не пересекают свои собственные траектории или не работают одновременно с другими транспортными средствами при следовании по переплетенным траекториям транспортных средств. Способность переплетать траектории множества одновременно работающих транспортных средств для катания является необходимой в ситуациях, когда конструкторы аттракциона для катания хотят имитировать на первый взгляд случайные схемы передвижения, образованные передвижением стаи рыб, налетом стаи воробьев или движением стада диких животных.
[0011] Подзарядка транспортных средств, работающих от аккумулятора, также является проблематичной. Конструкторы транспортных средств, работающих от аккумулятора, могут брать за основу емкость аккумулятора в зависимости от ожидаемой величины заряда, необходимой для хранения, чтобы передвигать полностью загруженное транспортное средство через все шоу от начала до конца, для заданного числа шоу в день; эта величина заряда может называться максимальным уровнем заряда. Во время шоу заряд будет отводиться от аккумулятора. Типичный аккумулятор может проходить цикл от 100% от его максимального уровня заряда до 10% от его максимального уровня заряда; так как типичная конструкция будет извлекать весь возможный заряд из аккумулятора до подзарядки аккумулятора. Как только аккумулятор будет разряжен (например, до уровня 10%), аккумулятор будет соединен с системой зарядки, которая будет медленно заряжать аккумулятор от его разряженного уровня обратно до максимального уровня заряда для следующего шоу. Быстрая зарядка была невозможна, так как аккумуляторы будут перегреваться, если слишком много заряда было направлено в них слишком быстро. В связи с этим, как только заряд транспортного средства будет исчерпан, оно будет выведено из эксплуатации для подзарядки. Выведенное из эксплуатации транспортное средство должно быть заменено дополнительным транспортным средством.
[0012] Что необходимо, так это транспортное средство для катания, которое имеет автономное питание может находить свой путь через аттракцион с помощью метода счисления пути, сконструировано механически и управляется электрически с возможностью эффективного использования энергии, не ограниченное потреблением энергии от пути или следованием по пути или проводу, может быть запрограммировано на перемещение на первый взгляд по случайной схеме при пересечении траекторий других транспортных средств, работающих одновременно в непосредственной близости, позволяет независимое вращение верхней пассажирской платформы относительно нижней управляемой и движущейся платформы, где верхняя платформа совершает движение тангажа и крена и вращается относительно нижней платформы для совершения движения рыскания, и не требует выведения из эксплуатации или нахождения в одном месте в течение длительного периода времени относительно времени, когда оно находится в движении, для подзарядки его аккумуляторов.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0013] Настоящее изобретение устраняет вышеупомянутые неудобства и недостатки традиционных систем и схем, связанных с транспортными средствами для катания в парках развлечений. В соответствии с вариантом выполнения изобретения, узел движения, выполненный с возможностью производить движения тангажа и крена, может включать в себя нижнюю реактивную плиту, ориентированную в горизонтальной плоскости, верхнюю реактивную плиту, разнесенную на расстояние от нижней реактивной плиты, поворотную муфту, имеющую верхний вал и нижний вал, проходящие от центра поворотной муфты и заканчивающиеся на соответственных концах верхнего и нижнего валов, причем конец верхнего вала соединен с верхней реактивной плитой, и конец нижнего вала соединен с нижней реактивной плитой, и когда поворотная муфта ориентирована вертикально, ее центральная ось перпендикулярна горизонтальной плоскости, и по меньшей мере два линейных привода, разнесенные друг от друга и от поворотной муфты и соединенные на соответственных верхних концах с верхней реактивной плитой и на соответственных нижних концах с нижней реактивной плитой, и выполненные с возможностью выдвижения и втягивания для поворота верхней реактивной плиты вокруг поворотной муфты, чтобы производить движения тангажа и крена верхней реактивной плиты относительно нижней реактивной плиты.
[0014] В соответствии с другим вариантом выполнения изобретения, транспортное средство может включать первое управляемое движущее колесо, соединенное с шасси и выполненное с возможностью вращения первого колеса в первом заданном направлении и вращения первого колеса с первой заданной скоростью, второе управляемое движущее колесо, соединенное с шасси и выполненное с возможностью вращения второго колеса во втором заданном направлении и вращения второго колеса со второй заданной скоростью, нижнюю реактивную плиту, соединенную с шасси, верхнюю реактивную плиту, разнесенную на расстояние от нижней реактивной плиты, поворотную муфту, имеющую верхний вал и нижний вал, проходящие от центра поворотной муфты и заканчивающиеся на соответственных концах верхнего и нижнего валов, причем конец верхнего вала прикреплен к верхней реактивной плите, и конец нижнего вала прикреплен к нижней реактивной плите, и по меньшей мере два линейных привода, разнесенных друг от друга и от поворотной муфты и соединенных на соответственных верхних концах с верхней реактивной плитой и на соответственных нижних концах с нижней реактивной плитой, и выполненных с возможностью выдвижения и втягивания для поворота верхней реактивной плиты вокруг поворотной муфты, чтобы производить движения тангажа и крена верхней реактивной плиты относительно нижней реактивной плиты.
[0015] Транспортное средство может дополнительно включать поворотный подшипник, прикрепленный к шасси и имеющий ведомую шестерню поворотного подшипника, вращаемую относительно шасси, двигатель ведущей шестерни поворотного подшипника, имеющий вал, причем двигатель ведущей шестерни поворотного подшипника прикреплен к шасси, ведущую шестерню поворотного подшипника, прикрепленную к валу, причем ведущая шестерня зацепляет ведомую шестерню поворотного подшипника и выполнена с возможностью вращения с заданной скоростью поворота и в заданном направлении, причем нижняя реактивная плита соединена с шасси через поворотный подшипник путем крепления нижней реактивной плиты к поворотному подшипнику, причем нижняя реактивная плита вращается вместе с поворотным подшипником и производит движение рыскания верхней реактивной плиты относительно шасси.
[0016] В соответствии с другим вариантом выполнения изобретения, транспортное средство может включать контроллер, память, соединенную с контроллером, интерфейс связи, соединенный с контроллером и выполненный с возможностью связи с контроллером системы для катания, который удален от транспортного средства, шасси, аккумулятор, выполненный в качестве единственного источника энергии для работы транспортного средства, независимо управляемые первое и второе управляемые движущие колеса, прикрепленные к шасси и выполненные с возможностью приведения в движение и управления транспортным средством согласно командам, подаваемым контроллером, нижнюю реактивную плиту, соединенную с шасси, верхнюю реактивную плиту, разнесенную на расстояние от нижней реактивной плиты, поворотную муфту, имеющую верхний вал и нижний вал, проходящие от центра поворотной муфты и заканчивающиеся на соответственных концах верхнего и нижнего валов, причем конец верхнего вала прикреплен к верхней реактивной плите, и конец нижнего вала прикреплен к нижней реактивной плите, и по меньшей мере два линейных привода, разнесенные друг от друга и от поворотной муфты и соединенные на соответственных верхних концах с верхней реактивной плитой и на соответственных нижних концах с нижней реактивной плитой, и выполненные с возможностью выдвижения и втягивания для поворота верхней реактивной плиты вокруг поворотной муфты, чтобы производить движения тангажа и крена верхней реактивной плиты относительно нижней реактивной плиты.
[0017] В соответствии с еще одним вариантом выполнения изобретения, транспортное средство может включать шасси, первое движущее колесо, соединенное с шасси, второе движущее колесо, соединенное с шасси и разнесенное от первого движущего колеса, поворотный подшипник, имеющий первую сторону, прикрепленную к шасси, и вторую сторону, содержащую ведомую шестерню поворотного подшипника, вращаемую относительно шасси, двигатель, выполненный с возможностью вращения ведомой шестерни поворотного подшипника, платформу, соединенную со второй стороной поворотного подшипника, причем платформа вращается относительно шасси под действием двигателя, и сиденье, соединенное с платформой, причем сиденье имеет переднюю сторону и заднюю сторону, противоположную передней стороне, причем передняя сторона сиденья может быть повернута в требуемое положение в любом направлении относительно шасси путем работы двигателя независимо от любого направления перемещения шасси.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Для дополнительного объяснения настоящего изобретения здесь обеспечены несколько фигур. А именно:
[0019] Фиг. 1 представляет собой вид в изометрии сверху транспортного узла, в соответствии с вариантом выполнения изобретения.
[0020] Фиг. 2 представляет собой вид в изометрии снизу транспортного узла на Фиг. 1.
[0021] Фиг. 3 представляет собой вид в изометрии сверху транспортного узла на Фиг. 1 с узлом движения, установленным на него, причем участок узла движения показан на виде с частичным разрезом/частичном фантомном виде, в соответствии с вариантом выполнения изобретения.
[0022] Фиг. 4 представляет собой вид в изометрии транспортного узла и узла движения транспортного средства на Фиг. 3 с пассажирским сиденьем, установленным сверху узла движения, в соответствии с вариантом выполнения изобретения.
[0023] Фиг. 5 представляет собой пример ведущего управляемого движущего колеса вида, показанного на Фиг. 1, 2 и 3, в соответствии с вариантом выполнения изобретения.
[0024] Фиг. 6A, 6B, 6C и 6D иллюстрируют различные движения, которые могут быть выполнены транспортным узлом, в соответствии с вариантом выполнения изобретения.
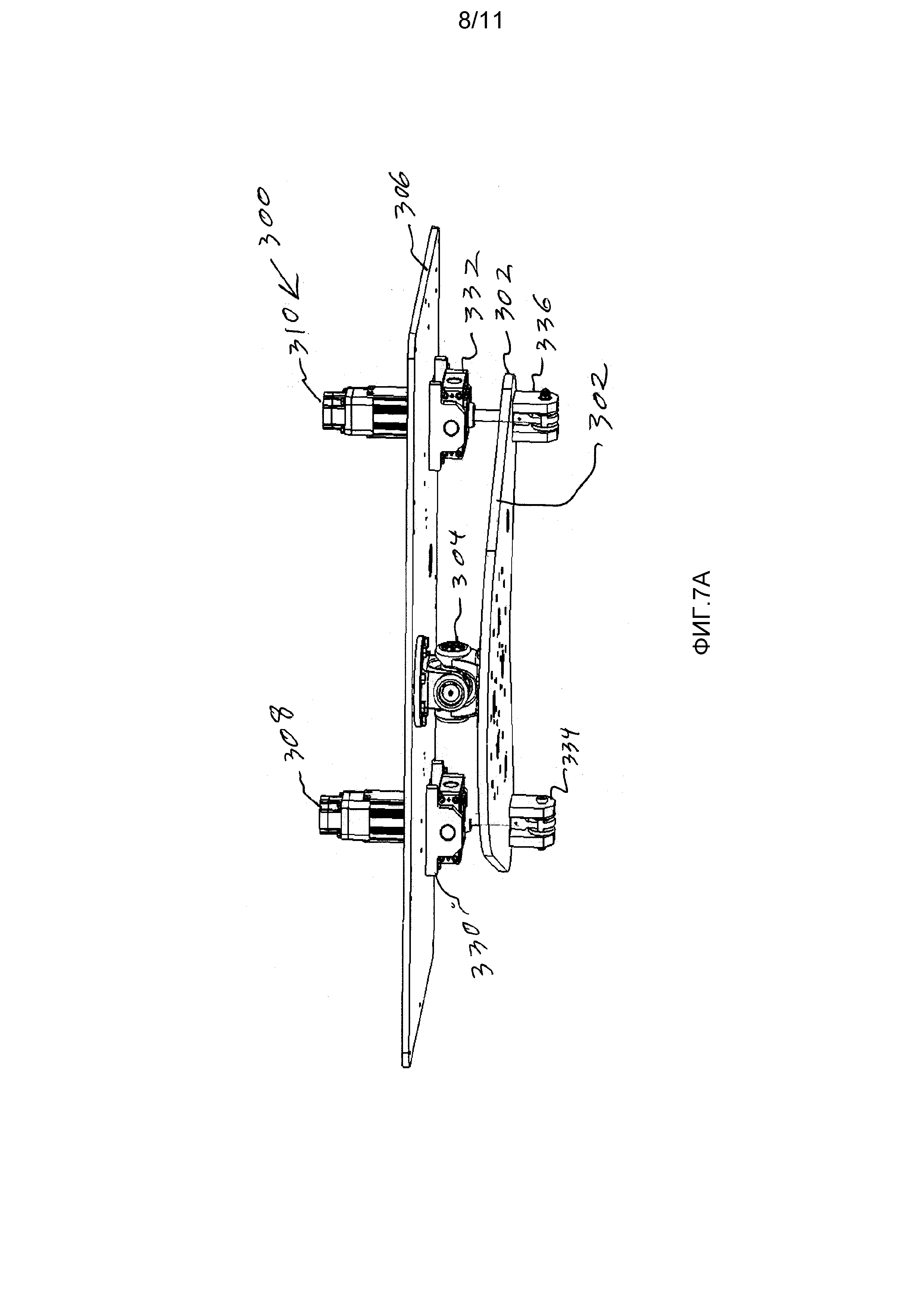
[0025] Фиг. 7A и 7B представляют собой виды в изометрии спереди снизу и сзади сверху узла движения, в соответствии с вариантом выполнения изобретения.
[0026] Фиг. 8 представляет собой частичный вид с правого боку в частичном поперечном сечении транспортного средства, в соответствии с вариантом выполнения изобретения.
[0027] Фиг. 9 представляет собой блок-схему транспортного средства и системы, в соответствии с вариантом выполнения изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
[0028] Следует понимать, что и вышеупомянутое общее описание и последующее подробное описание являются примерными. В связи с этим приведенные здесь описания не предназначены для ограничения объема охраны настоящего изобретения. Наоборот, объем охраны настоящего изобретения определяется объемом охраны приложенной формулы изобретения.
[0029] Транспортное средство аттракциона для катания, описанное здесь, может содержать три узла: транспортный узел, узел движения и пассажирский узел. Узел движения устанавливается сверху транспортного узла. Пассажирский узел устанавливается сверху узлов движения. Изобретение не ограничивается этой конфигурацией. Ниже будет описан каждый из трех узлов по порядку.
[0030] Фиг. 1 представляет собой вид в изометрии сверху транспортного узла транспортного средства 100, в соответствии с вариантом выполнения изобретения. Фиг. 2 представляет собой вид в изометрии снизу транспортного узла транспортного средства на Фиг. 1. Транспортный узел 100 представляет собой несущую раму транспортного средства для катания. Транспортный узел 100 обеспечивает разнонаправленное приведение в движение. Транспортный узел 100 включает в себя шасси 102. Шасси 102 поддерживает вес транспортного средства и всех пассажиров, едущих на нем. Транспортный узел 100 дополнительно включает два управляемых движущих колеса 104, 106, которые вместе могут образовывать движущую систему транспортного узла 100, и два пассивных ролика 108, 109. В данном контексте пассивный ролик 108, 109 содержит по меньшей мере одно колесо, установленное в поворотной раме, и используется, чтобы поддерживать транспортное средство. В данном контексте, управляемое движущее колесо 104, 106 представляет собой устройство, используемое для выполнения управления его колесом с помощью встроенного двигателя управления, и для выполнения вращения его колеса для приведения в движение устройства по поверхности перемещения, используя встроенный приводной двигатель и узел трансмиссии. Двигатель управления может вращать колесо управляемого движущего колеса на 360 градусов вокруг оси z. Управляемые движущие колеса 104, 106 могут быть установлены на шасси 102 в разнесенных на расстояние местах прямо противоположно друг другу.
[0031] Пассивные ролики 108, 109 могут быть установлены на шасси 102 в разнесенных на расстояние местах прямо противоположно друг другу, и повернуты на 90 градусов относительно местоположений двух управляемых движущих колес 104, 106. Колеса 112 пассивных роликов 108, 109 имеют свободный ход; то есть колеса 112 могут свободно катиться по часовой стрелке и против часовой стрелки и свободно поворачиваться (вращаться) в любом направлении. Возможны другие конфигурации управляемых движущих колес 104, 106 и пассивных роликов 108, 109; однако предпочтительный вариант выполнения изобретения включает в себя по меньшей мере два управляемых движущих колеса 104, 106. В предпочтительном варианте выполнения, который показан, управляемые движущие колеса 104, 106 размещены под углами 270 и 90 градусов относительно шасси 102. Однако в пределах объема охраны изобретения управляемые движущие колеса 104, 106 могут быть размещены под углами 0 и 180 градусов относительно шасси 102.
[0032] Шасси 102 может поддерживать аккумуляторный узел 114, узел управляющей электроники, узел привода двигателя и различные датчики, используемые во взаимодействии с бортовой навигационной системой (не показаны).
[0033] Аккумуляторный узел 114 может включать перезаряжаемый аккумулятор 910, который может содержать один или более элементов аккумулятора, и систему 912 управления аккумулятором. Аккумулятор 910 обеспечивает всю энергию, необходимую для работы транспортного средства аттракциона для катания между подзарядками. Система 912 управления аккумулятором управляет и контролирует зарядку аккумулятора 910. Система 912 управления аккумулятором может контролировать напряжение, температуру и другие параметры аккумулятора 910 для обеспечения подзарядки без повреждения элементов аккумулятора 910.
[0034] Для того, чтобы подзаряжать аккумулятор 910 транспортного средства аттракциона для катания в то время, когда транспортное средство может быть соединено с системой питания/зарядки, например, при загрузке или выгрузке пассажиров или при приостановке в течение достаточного количества времени в месте, находящемся в пределах пространства аттракциона для катания, было определено, что необходимо обеспечение заданного и относительно большого количества мощности/энергии транспортному средству в течение короткого периода времени. Количество мощности/энергии зависит от требований данного транспортного средства для катания. Количество времени, в общем, ограничено количеством времени, которое транспортное средство проводит при загрузке и/или выгрузке пассажиров, и количеством времени, если таковое имеется, при котором транспортное средство остается приостановленным в пределах аттракциона для катания. Такие приостановки могут возникать в то время, когда пассажиры транспортного средства смотрят кино или другое представление. Дополнительно, суммарное количество времени, необходимое для подзарядки, может быть разделено между множеством зарядных станций, которые могут быть посещены данным транспортным средством в пространстве данного аттракциона для катания. Эти значения четко определены без излишней необходимости в экспериментировании. Известные аккумуляторы и системы зарядки были найдены несоответствующими этой цели.
[0035] При преодолении проблем, связанных с известными аккумуляторами и системами питания/зарядки, было определено, что аккумулятор с большой емкостью будет обеспечивать возможность прикладывать большее количество мощности/энергии к аккумулятору, как функцию от времени, по сравнению с аккумулятором с меньшей емкостью. Окончательный полученный аккумулятор для данного транспортного средства для катания зависит от напряжения транспортных средств и текущих потребностей, а также ограничений, налагаемых на время, доступное для зарядки, как описано выше. Подходящая емкость аккумулятора может быть определена без излишнего экспериментирования, как только переменные, описанные выше, будут обеспечены специалисту в области техники. Допустимый уровень разряда аккумулятора между зарядками также может быть функцией переменных, описанных выше, и может быть уникальным для каждого другого типа транспортного средства.
[0036] Авторы получили неожиданное преимущество от их решения увеличить емкость аккумулятора (для обеспечения быстрой подзарядки при высоком токе). Емкость, требуемая для быстрой зарядки, была выше действительной емкости, необходимой для транспортного средства для катания. Наличие избыточной емкости обеспечило неожиданное преимущество уменьшения величины подзарядки, требуемой для работы транспортного средства для катания; таким образом, уменьшая количество времени, необходимое для подзарядки. Дополнительно, за счет использования аккумулятора, который имел большую емкость, чем требуемая для эксплуатационных нужд, было достигнуто неожиданное преимущество использования только небольшого количества емкости аккумулятора во время каждого шоу. Согласно варианту выполнения изобретения, аккумулятор 910 проходит цикл между 90-100 процентами от его полной емкости.
[0037] Шасси 102 также может поддерживать O-образный вращательный роликовый подшипник, называемый в области техники "поворотным подшипником" 120. Поворотный подшипник 120 может включать внутреннюю и/или внешнюю шестерню. В варианте выполнения на Фиг. 1 зубья шестерни поворотного подшипника 120 видны на внешней поверхности поворотного подшипника 120. В данном контексте, с целью сокращения, участок поворотного подшипника 120, который включает в себя шестерню, будет называться "верхний вкладыш 122 поворотного подшипника". Основание поворотного подшипника 120 может быть названо "нижним вкладышем 123 поворотного подшипника". Двигатель 827 (Фиг. 8) ведущей шестерни поворотного подшипника может содержать приводной вал 126, прикрепленный к ведущей шестерне 124 поворотного подшипника. Верхний вкладыш 122 поворотного подшипника вращается в нижнем вкладыше 123 поворотного подшипника. Так как нижний вкладыш крепится к шасси 102, вращение происходит относительно шасси 102. Зубья ведущей шестерни 124 поворотного подшипника зацепляют зубья верхнего вкладыша 122 поворотного подшипника. Двигатель 827 (Фиг. 8) ведущей шестерни поворотного подшипника может быть прикреплен к шасси 102. Соответственно, приводной вал 126 двигателя 827 (Фиг. 8) ведущей шестерни поворотного подшипника и ведущая шестерня 124 поддерживают неподвижное положение относительно шасси 102, пока ведущая шестерня 124 поворотного подшипника вращается относительно шасси. Верхний 122 вкладыш поворотного подшипника может приводиться в движение по часовой стрелке или против часовой стрелки относительно шасси, согласно направлению вращения ведущей шестерни 124 поворотного подшипника.
[0038] В варианте выполнения на Фиг. 1 ведущая шестерня 124 размещена снаружи поворотного подшипника 120. В альтернативном варианте выполнения (не показан), ведущая шестерня 124 может быть размещена внутри поворотного подшипника 120. В этой альтернативной конфигурации внутренняя шестерня поворотного подшипника 120 будет иметь зацепление с соответствующей шестерней ведущей шестерни 124. В любой конфигурации верхний вкладыш 122 поворотного подшипника может вращаться без необходимости остановки в направлениях по часовой стрелке или против часовой стрелки. Другими словами, в предпочтительном варианте выполнения изобретения, верхний вкладыш 122 поворотного подшипника может приводиться в движение по часовой стрелке или против часовой стрелки на величину угла свыше 360 градусов без необходимости возвращения в более раннее положение путем вращения в противоположном направлении.
[0039] Оптический датчик 210 положения, опосредованно соединенный с верхним вкладышем 122 поворотного подшипника, может контролировать и посылать информацию, относящуюся к вращению поворотного подшипника 122, в процессор 901. Зная величины и направления вращения и диаметров верхнего вкладыша 122 поворотного подшипника и ведущей шестерни 124 в точке, где их шестерни зацепляются, процессор 901 может вычислять угловое положение опорной точки, установленной на верхнем вкладыше 122 поворотного подшипника относительно соответствующей опорной точки на шасси 102.
[0040] Дополнительно, в варианте выполнения изобретения, первая часть 301 датчика может быть непосредственно или опосредованно соединена с верхним вкладышем 122 поворотного подшипника, и вторая часть 130 датчика может быть прикреплена к шасси 102. Верхний вкладыш 122 поворотного подшипника может приводиться в движение по часовой стрелке или против часовой стрелки до того, как сигнал от датчика не укажет на то, что первая и вторая части 301, 130 выровнены. Таким образом, процессор, управляющий движением верхнего вкладыша 122 поворотного подшипника и контролирующий выходной сигнал датчика, может вращать верхний вкладыш 122 поворотного подшипника до известного исходного положения. Все применимые типы датчика, такие как, например, датчик Холла, оптический датчик и точечный датчик, находятся в пределах объема охраны изобретения.
[0041] Шасси 102 также может включать контактное кольцо или вращающееся соединение 132 для обеспечения связей и передачи мощности к и от компонентов шасси 102 к участкам транспортного средства, соединенным с верхним вкладышем 122 поворотного подшипника. Вращающееся соединение 132 необходимо, так как, как объяснено выше, отсутствует ограничение на величину вращения верхнего вкладыша 122 поворотного подшипника относительно шасси 102.
[0042] Шасси 102 также может включать в себя бамперную систему 134, которая может поглощать энергию удара и распределять нагрузку удара по шасси 102. Бамперная система 134 может включать в себя несжимаемый вспененный материал 136, размещенный между внешней стенкой 138 шасси 102 и упругим наружным покрытием 140, например, тонким листом металла. Вспененный материал 136 может быть приклеен или иначе прикреплен к внешней стенке 138. Вспененный материал 136 и упругое наружное покрытие 140 могут быть выполнены в сегментах 142, которые прилегают или перекрывают друг друга. В одном варианте выполнения крепление к шасси выполнено, используя болты и распорные трубки, обеспечивая отклонение болтов без каких-либо выступающих деталей. Сегменты 142 могут быть прикреплены к вспененному материалу 136 и/или внешней стенке 138 шасси 102. Упругое наружное покрытие 140 может быть покрыто другим упругим материалом 144, например, неопреном (чтобы поглощать или отражать незначительные контакты с поверхностями). Согласно предпочтительному варианту выполнения, бамперная система 134 может поглощать и отскакивать от контакта с другим подобным транспортным средством или стеной или неподвижным предметом в пространстве аттракциона для катания, когда транспортное средство движется на его самой высокой допустимой скорости.
[0043] Фиг. 3 представляет собой вид в изометрии сверху транспортного узла 100 на Фиг. 1 с узлом 300 движения, установленным на нем, причем участок узла 300 движения показан на виде с частичным разрезом/частичном фантомном виде, все в соответствии с вариантом выполнения изобретения. Более подробно, узел 300 движения может быть размещен на верхней поверхности верхнего вкладыша 122 поворотного подшипника и прикреплен к верхнему вкладышу 122 поворотного подшипника. В предпочтительном варианте выполнения, узел 300 движения прикреплен болтами к верхнему вкладышу 122 поворотного подшипника. Компоненты и функция узла 300 движения будут описаны подробно ниже со ссылкой на Фиг. 7A и 7B.
[0044] В качестве введения, узел 300 движения может включать в себя нижнюю реактивную плиту 302, шарнирное соединение или поворотную муфту 304, верхнюю реактивную плиту 306 (показанную на виде с частичным разрезом/частичном фантомном виде) и по меньшей мере два линейных привода 308, 310. Нижняя реактивная плита 302 прикреплена к верхнему вкладышу 122 поворотного подшипника, как объяснено выше. Поворотная муфта 304 соединена на нижнем конце с нижней реактивной плитой 302 и на верхнем конце с верхней реактивной плитой 306. В одном варианте выполнения поворотная муфта 304 установлена выше геометрического центра поворотного подшипника 120; однако допустимы и другие места. Каждый из линейных приводов 308 соединен на нижнем конце с нижней реактивной плитой 302 и на верхнем конце с верхней реактивной плитой 306. Линейные приводы 308, 310 разнесены друг от друга и от поворотной муфты 304. В одном варианте выполнения, первый линейный привод 308 размещен на правой задней стороне узла 300 движения, и второй линейный привод 310 размещен на левой задней стороне узла 300 движения, оба дальше по направлению к задней части узла 300 движения, чем поворотная муфта 304. Допустимы и другие ориентации при условии, что альтернативная ориентация будет приводить к узлу движения, верхняя реактивная плита которого совершает движение тангажа и крена относительно нижней реактивной плиты, и это перемещение сосредоточено выше поворотной муфты 304, причем поворотная муфта находится на, по существу, постоянной высоте и является, по существу, несжимаемой.
[0045] Фиг. 4 представляет собой вид в изометрии транспортного средства 400, содержащий объединенные транспортный узел 100 и узел 300 движения на Фиг. 3, и дополнительно включает в себя пассажирскую платформу 402, установленную на узле 300 движения, и ряды сидений 404, установленные на пассажирской платформе 402, все в соответствии с вариантом выполнения изобретения. В альтернативном варианте выполнения ряды сидений могут быть установлены непосредственно на верхнюю реактивную плиту 306 без необходимости отдельной пассажирской платформы 402. В альтернативном варианте выполнения, верхняя реактивная плита 306 будет использоваться в качестве пассажирской платформы.
[0046] В целях обсуждения здесь, со ссылкой на Фиг. 4, ряды сидений 404 и транспортный узел 100 транспортного средства 400 рассматриваются как обращенные вперед по направлению к 0 градусам на компасе. Правые стороны рядов сидений 404 и транспортного узла 100 транспортного средства 400 являются смежными точке 90 градусов на компасе. Задние стороны рядов сидений 404 и задняя сторона транспортного узла 100 транспортного средства 400 обращены назад по направлению к 180 градусам на компасе. Левые стороны рядов сидений 404 и транспортного узла 100 транспортного средства 400 являются смежными точке 270 градусов на компасе. Разумеется, ряды сидений 404 и транспортный узел 100 могут быть обращены и перемещаться в других направлениях при одновременном выравнивании или при вращении вокруг друг друга благодаря соединению рядов сидений с верхним вкладышем 122 поворотного подшипника. В данном контексте, со ссылкой на Фиг. 4, ось y выровнена с точками 180 и 0 градусов на компасе, ось x выровнена с точками 270 и 90 градусов на компасе, и ось z проходит вверх, перпендикулярно поверхности, на которой стоит транспортное средство 400. Выражения "движущийся вперед" или "перемещающийся вперед" обозначают движение в большей степени в положительном направлении вдоль оси y. Движения или перемещение в направлениях влево, вправо и обратно (или назад или в обратном направлении) имеют их обычные значения по отношению к прямому направлению.
[0047] Предпочтительный вариант выполнения на Фиг. 4 иллюстрирует два параллельных ряда сидений: передний ряд 404F и задний ряд 404B. Ряды сидений перпендикулярны оси y. В показанном варианте выполнения каждый из рядов сидений 404 включает в себя четыре места. Предпочтительно четное число рядов и мест. Однако другие конфигурации и другое число мест находятся в пределах объема охраны изобретения. Например, меньшее или большее число мест в одном или более рядах и нечетное число рядов и/или мест в рядах находятся в пределах объема охраны изобретения. Более того, места, расположенные по кругу, обращенные внутрь или наружу, также находятся в пределах объема охраны изобретения.
[0048] Согласно предпочтительному варианту выполнения, два ряда сидений 404, имеющие четыре места каждый, размещены на одинаковом расстоянии от воображаемой точки на верхней поверхности пассажирской платформы 402. Вертикальная ось, проходящая через эту точку, предпочтительно проходит через геометрический центр поворотного подшипника 120. Это обеспечивает не эксцентриковое вращение рядов сидений 404 относительно поворотного подшипника 120. Если эта точка также размещена выше середины на воображаемой горизонтальной оси, проходящей между левым и правым управляемыми движущими колесами 104, 106, центр вращения рядов сидений 404 будет совпадать с центром движения шасси 102. Если эта точка также пересекает воображаемую вертикальную ось, проходящую через поворотную муфту 304, ряды сидений, которые размещены на одинаковом расстоянии от этой точки, будут ощущать относительно равные величины вертикального отклонения, когда узел 300 движения совершает движение тангажа и крена. Разумеется, другие положения рядов сидений 404 относительно точки на воображаемой оси, проходящей между левым и правым управляемыми движущими колесами 104, 106, и относительно точки на вертикальной оси поворотной муфты 304, находятся в пределах объема охраны изобретения. Однако, с учетом выравнивания, описанного выше, все сиденья, изображенные на Фиг. 4, подвергаются относительно равным воздействиям во время движения рыскания, тангажа и крена.
[0049] Фиг. 5 представляет собой пример ведущего управляемого движущего колеса 500 (подобно 104, 106 на Фиг. 1-3) в соответствии с вариантом выполнения изобретения. Управляемое движущее колесо 500 включает в себя электрический двигатель 502 и трансмиссионный узел 504, установленные на противоположных сторонах плиты 506 основания. При использовании варианта выполнения на Фиг. 1 плита 506 основания может быть прикреплена к шасси 102 транспортного узла 100. Двигатель 502 приводит в движение трансмиссию 504, которая приводит в движение колесо 508. Трансмиссия 504 выполнена с возможностью вращения колеса 508 управляемого движущего колеса 500 в плоскости, перпендикулярной земле, для обеспечения движущей силы транспортному узлу 100. Ведущее управляемое движущее колесо 500 дополнительно включает в себя электрический двигатель 510 управления, установленный на одной стороне плиты 506 основания. Вал 512 двигателя 510 управления прикреплен к ведущей шестерне 514 управления. Ведущая шестерня 514 управления зацепляет направляющую шестерню 516. Подобно работе поворотного подшипника 120 и ведущей шестерни 124 поворотного подшипника, направляющая шестерня 516 прикреплена к трансмиссионному узлу 504, который прикреплен к и вращается в горизонтальной плоскости с поворотным колесом 508 управляемого движущего колеса 500. Двигатель 510 управления прикреплен к плите 506 основания. Вал 512 двигателя 510 управления и ведущая шестерня 514 управления поддерживают их местоположение относительно плиты 506 основания. Когда вал 512 двигателя 510 управления вращает ведущую шестерню 514 управления, направляющая шестерня 516 вращается относительно основания 506 и тем самым заставляет трансмиссионный узел 504 и колесо 508, соединенное с ним, поворачиваться вокруг вертикальной оси. В соответствии с этим описанием, процессор будет способен выполнять команды приведения в движение электрического двигателя 502 с заданной скоростью. Зная передаточное отношение трансмиссионного узла 504, и зная диаметр колеса 508, процессор будет способен вычислять величину вращения колеса 508 в заданный промежуток времени. Соответственно, процессор может определять, насколько управляемое движущее колесо 500 продвинулось по поверхности. Дополнительно, учитывая знание величины угла поворота вала 512 двигателя 510 управления и диаметров ведущей шестерни 514 управления и направляющей шестерни 516, процессор может подавать команду поворачиваемому колесу 508 следовать в любом направлении по компасу.
[0050] Фиг. 6A, 6B, 6C и 6D иллюстрируют различные движения, которые могут быть выполнены транспортным узлом 600 транспортного средства, имеющим два управляемых движущих колеса 104, 106 и два пассивных ролика 108, 109, в соответствии с вариантом выполнения изобретения. Иллюстрации представляют собой виды сверху. Ряды сидений 404F, 404B показаны для сведения. На иллюстрациях сиденья 404F, 404B остаются указанными под углом 0 градусов в то время, как транспортный узел 600 вращается под ними. Вращение транспортного узла 600 относительно сидений 404F, 404B достигается действием поворотного подшипника 120.
[0051] Фиг. 6A иллюстрирует три направления движения вперед, достигаемые транспортным узлом 600, имеющим управляемые движущие колеса и пассивные ролики, выполненные по типу транспортного средства 400 на Фиг. 4. На иллюстрации на Фиг. 6A управляемые движущие колеса 104, 106 и колеса пассивных роликов 108, 109 изображены выровненными параллельно оси y (которая находится под углом 0 градусов). Для достижения этого выравнивания, если управляемые движущие колеса 104, 106 еще не выровнены таким образом, процессор (не показан) может подавать команду каждому управляемому движущему колесу 104, 106 вращаться до 0 градусов. Когда перемещение начнется, пассивные ролики 108, 109 будут выровнены с управляемыми движущими колесами 104, 106.
[0052] Касательно левого и правого управляемых движущих колес 104, 106, размещенных под углом 0 градусов, команда от процессора на одновременное приведение в движение колес левого и правого управляемых движущих колес 104, 106 с одинаковой скоростью в направлении вперед будет заставлять транспортное средство 600 двигаться вперед в направлении стрелки 602.
[0053] Команда на вращение вперед и левого, и правого управляемых движущих колес 104, 106, когда левое колесо 104 получает команду вращаться медленнее, чем правое колесо 106, будет заставлять транспортное средство двигаться налево по кривой большого радиуса, как обозначено стрелкой 606.
[0054] Команда на вращение вперед и левого, и правого управляемых движущих колес 104, 106, когда левое колесо 104 получает команду вращаться быстрее, чем правое колесо 106, будет заставлять транспортное средство двигаться направо по кривой большого радиуса, как обозначено стрелкой 608.
[0055] Ширины поворотов, описанных выше, могут быть определены разницей скоростей между левым и правым управляемыми движущими колесами 104, 106 колеса. Например, команда на вращение вперед только правого колеса 106 без вращения левого колеса 104 будет заставлять транспортное средство совершать крутой поворот влево. Команда на вращение вперед только левого колеса 104 без вращения правого колеса 106 будет заставлять транспортное средство совершать крутой поворот вправо.
[0056] Изменение направлений вращения колес будет заставлять транспортное средство двигаться в соответственных обратных направлениях.
[0057] Преимущество конфигурации по меньшей мере двух управляемых движущих колес 104, 106 и пассивных роликов 108, 109 заключается в том, что транспортное средство 600 может быть выполнено с возможностью выполнения поворотов на месте, как показано на Фиг. 6B. Такой поворот может быть выполнен колесами левого и правого управляемых движущих колес 104, 106 при положениях их подшипников под углом 0 градусов, когда процессор подает команды на вращение колес управляемых движущих колес 104, 106 в противоположных направлениях при равных скоростях. Повороты на месте по часовой стрелке и против часовой стрелки, как показано стрелкой 610, могут быть выполнены путем изменения соответственных направлений вращения колес. Как показано на Фиг. 6B, так как пассивные ролики 108, 109 свободно поворачиваются в любом направлении, они естественно и пассивно поворачиваются в направлении, которое перпендикулярно направлению управляемых движущих колес 104, 106(после того, как начинается перемещение транспортного средства).
[0058] Другое преимущество конфигурации по меньшей мере двух управляемых движущих колес 104, 106 (и пассивных роликов 108, 109) заключается в том, что транспортный узел 600 может быть выполнен с возможностью движения с отклонением влево или вправо. Обычно, выражение движение с отклонением используется в контексте авиационной навигации. Словарь Merriam-Webster определяет "движение с отклонением" как "угловую разность между курсом воздушного судна и направлением, необходимым для получения этого курса при наличии бокового ветра". В контексте воздушного судна боковой ветер имеет направление ветра, которое не параллельно курсу воздушного судна. Путем примера, если взлетно-посадочная полоса проходит в направлении север-юг (когда север находится в 0 градусов и юг находится в 180 градусах) вдоль оси y, и боковой ветер дует справа, воздушное судно может принимать направление 5 градусов для того, чтобы поддерживать курс (т.е. направление перемещения) нуля градусов при посадке.
[0059] Применительно к настоящей заявке выражение "движение с отклонением" приобретает другое значение. В данном контексте выражение "движение с отклонением" наилучшим образом описано с помощью следующих примеров. На Фиг. 6C ряды сидений 404F, 404B поддерживаются в прямом направлении так, что сидящий пассажир будет обращен в направлении стрелки 612, параллельной оси y, и в то же время транспортный узел 600 транспортного средства движется в диагональном направлении, которое показано стрелкой 614. Хотя стрелка 614 изображена указывающей в направлении 45 градусов, для движения с отклонениями из стороны в сторону угол между направлением, в котором обращены ряды сидений 404F, 404B, и направлением, в котором движется транспортный узел 600, будет больше 0 градусов. Другими словами, как показано на Фиг. 6C, пока ряды сидений 404F, 404B и пассажиры на них обращены в направлении 0 градусов, транспортное средство движется с отклонением в направлении 45 градусов. Движение с отклонениями из стороны в сторону не ограничивается линейными движениями. Транспортное средство может двигаться с отклонениями из стороны в сторону, например, вдоль кривой, по кругу или по спирали с увеличивающимся или уменьшающимся диаметром.
[0060] Для достижения движения с отклонениями из стороны в сторону, например, как изображено на Фиг. 6C, процессор подает команду управляемым движущим колесам 104, 106 на вращение по часовой стрелке в направлении 45 градусов и на одновременное вращение с одинаковой скоростью. В этом состоянии, хотя сиденья 404F, 404B транспортного средства обращены в направлении 0 градусов, транспортный узел 600 транспортного средства движется в направлении стрелки 614, то есть под 45 градусов.
[0061] Транспортные средства, в соответствии с вариантами выполнения изобретения, выполнены с возможностью "движения с отклонением" влево или вправо и в прямом, и в обратном направлениях. Транспортное средство в соответствии с вариантами выполнения изобретения может двигаться с отклонениями из стороны в сторону под любым углом между, но не равным, 0 и 180 градусами и между, но не равным, 180 и 360 градусами (углы 0 и 180 градусов зарезервированы для движения в прямом и обратном направлениях, соответственно). Однако транспортные средства, в соответствии с вариантами выполнения изобретения, могут считаться двигающимися с отклонением, если узел перемещения вращается в диапазоне угловых положений, которые включают 0, 180 или 360 градусов. Например, если ряды сидений 404F, 404B поддерживались в положении, указывающем на 0 градусов в то время, как транспортный узел 600 следовал по кривой, которая заставляет его "переднюю часть" указывать на дугу, включающую диапазон от 120 до 200 градусов, транспортное средство будет двигаться с отклонением, не смотря на то, что оно проходит через точку 180 градусов.
[0062] Фиг. 6D иллюстрирует случай, когда процессор подает команду управляемым движущим колесам 104, 106 на поворот по часовой стрелке в направлении 90 градусов и на одновременное вращение с одинаковой скоростью. В этом состоянии, хотя сиденья 404F, 404B транспортного средства указывают на 0 градусов, транспортный узел 600 транспортного средства движется в направлении стрелки 616, непосредственно вправо в направлении 90 градусов в направлении стрелки 618. "Движение с отклонением" влево (т.е. перемещение в направлении 270 градусов) может быть выполнено изменением направления вращения колес при сохранении ориентации 90 градусов или вращением управляемых движущих колес 104, 106 в направлении 270 градусов и одновременном вращении с одинаковой скоростью в одном направлении.
[0063] Движение с отклонениями из стороны в сторону невозможно с безрельсовым транспортным средством, которое имеет менее двух управляемых движущих колес. Движение с отклонениями из стороны в сторону невозможно с безрельсовым транспортным средством, которое имеет два управляемых движущих колеса, которые не вращаются вокруг оси z (т.е. они не управляются). Такие транспортные средства поворачиваются, используя дифференциальное управление, например которое описано со ссылкой на Фиг. 6A. Транспортные средства, используемые в уровне техники аттракционов, которые известен авторам, не могут двигаться с отклонениями из стороны в сторону, так как ни одно из известных транспортных средств не использует по меньшей мере два управляемых движущих колеса и пассажирскую платформу, которая вращается относительно шасси с помощью использования поворотного подшипника.
[0064] Фиг. 7A и 7B представляют собой виды в изометрии спереди снизу и сзади сверху узла 300 движения, в соответствии с вариантом выполнения изобретения. Узел 300 движения может включать в себя нижнюю реактивную плиту 302, поворотную муфту 304, верхнюю реактивную плиту 306 и по меньшей мере два линейных привода 308, 310. В предпочтительном варианте выполнения линейные приводы 308, 310 относятся к электрическому типу. Другие типы линейных приводов, например, винтовой тип и гидравлический тип находятся в пределах объема охраны изобретения. Поворотная муфта 304 прикреплена на нижнем конце к нижней реактивной плите 302 и на верхнем конце к верхней реактивной плите 306. В варианте выполнения транспортного средства, имеющего два ряда сидений, для обеспечения того, чтобы точка, в которой пассажирская платформа поворачивается, не была эксцентричной вращению поворотного подшипника, поворотная муфта 304 может быть размещена так, что ее вертикальная ось совпадает с геометрическим центром поворотного подшипника 120. Линейные приводы 308, 310 прикреплены к муфтам 330, 332, соответственно, на их верхних концах. Муфты 330, 332, в свою очередь, прикреплены к верхней реактивной плите 306. Линейные приводы 308, 310 прикреплены к узлам 334, 336 скобы, соответственно, на их нижних концах. Узлы 334, 336 скобы, в свою очередь, прикреплены к нижней реактивной плите 302. Муфты 330, 332 могут быть выполнены в виде карданных подвесов. Карданные подвесы 330, 332 обеспечивают линейным приводам наклон в широком диапазоне углов, когда нижняя и верхняя реактивные плиты 302, 306 совершают движение тангажа и крена относительно друг друга.
[0065] Узел 300 движения механически передает движения тангажа и крена (вокруг поворотной муфты 304) рядам сидений 404, прикрепленным к пассажирской платформе 402, через верхнюю реактивную плиту 306. Выдвижение и втягивание линейных приводов 308, 310 относительно друг друга определяют величину тангажа и крена, испытываемую верхней реактивной плитой относительно нижней реактивной плиты.
[0066] Максимальное усилие, требуемое от каждого линейного привода 308, 310 (для выдвижения и втягивания) может быть вычислено, учитывая информацию, включающую в себя геометрию размещения рядов сидений, размещения линейных приводов относительно поворотной муфты 304 и знание нагрузки, ожидаемой на верхней реактивной плите 306. Такие вычисления известны специалисту в области техники. Следует понимать, что, когда точки крепления линейных приводов 308, 310 передвигаются от поворотной муфты 304, усилие, требуемое от каждого линейного привода, уменьшается, когда длина плеча силы между точкой крепления и поворотной муфтой 304 увеличивается. Однако это уменьшение усилия ограничено ходом линейных приводов, а также скоростью, с которой линейные привода могут выдвигаться и втягиваться.
[0067] В предпочтительном варианте выполнения, поворотная муфта 304 может быть муфтой для двух валов, которая способна передавать крутящий момент от одного вала к другому, даже когда два вала не коллинеарны. Поворотная муфта 304 передает крутящий момент от одного вала к другому, даже если валы не выровнены. Поворотная муфта 304 является предпочтительно несжимаемой или, по существу, несжимаемой. Поворотная муфта 304 предпочтительно поддерживает вес максимальной пассажирской загрузки плюс вес всех аппаратных компонентов, которые поддерживаются верхней реактивной плитой 306. Эти компоненты включают в себя сиденье, электронику различного назначения, включающую в себя звуковые и осветительные устройства, оборудование для обеспечения безопасности и электронное оборудование контроля и управления и любую декоративную конструкцию, выполненную для скрытия электромеханических компонентов транспортного средства и придания транспортному средству вид, который соответствует теме аттракциона для катания. В предпочтительном варианте выполнения и как проиллюстрировано на Фиг. 3, 7A, 7B и 8, поворотная муфта 304 может быть карданным соединением (также известным, как универсальное соединение или универсальная муфта).
[0068] Использование поворотной муфты 304 приводит к значительной экономии энергии для транспортного средства, по сравнению с транспортным средством, которое может обеспечивать такие же движения тангажа, крена и рыскания на работающем от аккумулятора самоподвижном узле. В известном уровне техники транспортные средства аттракциона для катания могут обеспечивать три или четыре степени подвижности. Транспортное средство аттракциона для катания с тремя степенями подвижности может обеспечивать ощущения движений тангажа, крена и вертикальной качки. Движение тангажа можно сравнить с наклоном вперед или назад (который ощущается в воздушном судне при наборе высоты или пикировании). Движение крена можно сравнить с наклоном вправо или влево. Вертикальную качку можно сравнить с ощущением подъема или падения вдоль вертикальной оси. В дополнение к ощущениям движений тангажа, крена и вертикальной качки, транспортное средство аттракциона для катания с четырьмя степенями подвижности также может обеспечивать ощущение движения рыскания. Движение рыскания можно сравнить с перемещением записи на проигрывателе.
[0069] В типичной конфигурации транспортного средства аттракциона для катания ощущения движений тангажа, крена и вертикальной качки обычно достигаются путем поддержания полезной нагрузки (т.е. пассажиров, пассажирской кабины и ее содержимого) в нейтральном положении, используя три или четыре электрических или пневматических линейных привода и систему боковых стабилизаторов. Вертикальная качка ощущается путем перемещения полезной нагрузки из нейтрального положения в направлениях вверх или вниз вдоль вертикальной оси путем выдвижения или втягивания линейных приводов в одно и то же время и при одинаковой скорости. Ощущения движений тангажа и/или крена обычно достигаются путем выдвижения или втягивания одного или более линейных приводов в одно и то же время и при различных скоростях или в различных направлениях относительно друг друга. Как будет понятно специалисту в области техники, количество энергии, расходуемой всего лишь на поддержание полезной нагрузки в нейтральном положении, не учитывая даже применения усилия для приведения полезной нагрузки в направлениях тангажа, крена и/или в вертикальную качку, может быть значительным. Авторам требовался способ уменьшения потребления энергии, в частности, потому как авторы проектировали транспортное средство, работающее от аккумулятора.
[0070] Авторы приняли во внимание, что, когда полезная нагрузка механически поддерживалась на постоянной высоте в централизованной поворотной точке, поворотная точка не требовалась для перемещения вдоль его вертикальной оси, и использовались только два линейных привода (как показано в вариантах выполнения, описанных здесь), энергия, требуемая для ощущения движений тангажа и крена была значительно уменьшена, по сравнению с типичными конфигурациями транспортных средств аттракциона для катания, которые описаны выше. Авторы предположили, что в конфигурации вариантов выполнения, описанных здесь, линейные приводы расходовали только то количество энергии, которое необходимо для наклона пассажирской платформы вверх или вниз относительно центральной точки поворота; центральная точка поворота, по существу, поддерживала наибольшую часть веса полезной нагрузки.
[0071] Авторы заключили, что транспортное средство увлекательного трехмерного аттракциона для катания для ежедневного использования в типичном развлекательном заведении, имеющем большие требования по пропускной способности посетителей, которое предлагало ощущения движений тангажа, крена и рыскания, достижимо в конфигурации, работающей от аккумулятора. Соответственно, авторы достигли практического преимущества значительной экономии энергии, используя транспортное средство для катания, имеющее конфигурацию, подобную вариантам выполнения изобретения, описанным здесь, по сравнению с обычным вариантом выполнения транспортных средств для катания.
[0072] Согласно предпочтительным вариантам выполнения, поворотная муфта 304, которая обеспечивает вышеописанную централизованную поворотную точку, предпочтительно предотвращает все или большую часть бокового движения верхней реактивной плиты 306. Можно представить причину этого требования, если заменить поворотную муфту 304 пружиной без боковой опоры. Хотя пружина может быть выполнена с возможностью поддержки веса, размещенного на верхней реактивной плите 306, пружина при сгибании может обеспечивать верхней реактивной плите 306 латеральное скольжение. Допустимая поворотная муфта, использующая шаровую опору, пружину, гибкий резиновый или стеклопластиковый вал или их эквиваленты (при условии, что эти альтернативные компоненты могут выдерживать динамические силы, действующие на них при перемещении полезной нагрузки), потребует использования боковых стабилизирующих устройств. Соответственно, шаровая опора, пружина, гибкий резиновый или гибкий стеклопластиковый вал или их эквиваленты в совокупности с боковыми стабилизирующими устройствами могут считаться поворотными муфтами, которые находятся в пределах объема охраны этого изобретения.
[0073] Фиг. 8 представляет собой вид с правого боку в частичном поперечном сечении транспортного средства 400, в соответствии с вариантом выполнения изобретения. Как описано выше, транспортное средство 400 содержит два параллельных ряда 404F, 404B с четырьмя местами каждый. Ряды сидений 404F, 404B прикреплены к пассажирской платформе 402. Пассажирская платформа 402 прикреплена к верхней реактивной плите 306. Поворотная муфта 304 прикреплена на ее верхнем конце к верхней реактивной плите 306 и на ее нижнем конце к нижней реактивной плите 302. Каждый из пары линейных приводов соединен на их соответственных верхних концах с верхней реактивной плитой 306 и на их соответственных нижних концах с нижней реактивной плитой 302. На иллюстрации на Фиг. 8 показан только один линейный привод 308 (расположенный на левой стороне узла движения). Четыре колеса соединены с шасси. На иллюстрации на Фиг. 8 показаны два пассивных ролика 108, 109. Частично показано одно управляемое движущее колесо 104. Нижняя реактивная плита 302 прикреплена к верхнему вкладышу 122 поворотного подшипника. Нижний вкладыш поворотного подшипника или основание 123 поворотного подшипника прикреплено к шасси 102. Для простоты иллюстрации вращающееся соединение 132 исключено из иллюстрации на Фиг. 8.
[0074] В раскрытых вариантах выполнения ряды сидений 404F, 404B, которые прикреплены к верхней реактивной плите 306 узла 300 движения посредством пассажирской платформы 402, могут совершать движения тангажа и крена. Так как узел 300 движения закреплен на верхнем вкладыше 122 поворотного подшипника, узел 300 движения может вращаться. Результат этих перемещений позволяет пассажирам, сидящим в рядах сидений 404F, 404B, ощущать движения тангажа, крена и рыскания.
[0075] Альтернативный вариант выполнения, в котором положения узла 300 движения и поворотного подшипника 120 поменяны местами, находится в пределах объема охраны изобретения. Другими словами, в пределах объема охраны изобретения находится крепление нижней реактивной плиты 302 узла 300 движения непосредственно к шасси 102 и крепление поворотного подшипника 120 к верхней реактивной плите 306. В любом варианте выполнения посетители будут ощущать движения тангажа, крена и рыскания. Однако авторы обнаружили, что конфигурация альтернативного варианта выполнения увеличивает сложность размещения рядов сидений 404F, 404B в трехмерном пространстве. Соответственно, в предпочтительных вариантах выполнения, таких как на Фиг. 1-8, поворотный подшипник 120 прикреплен к шасси 102, и узел 300 движения закреплен сверху поворотного подшипника 120.
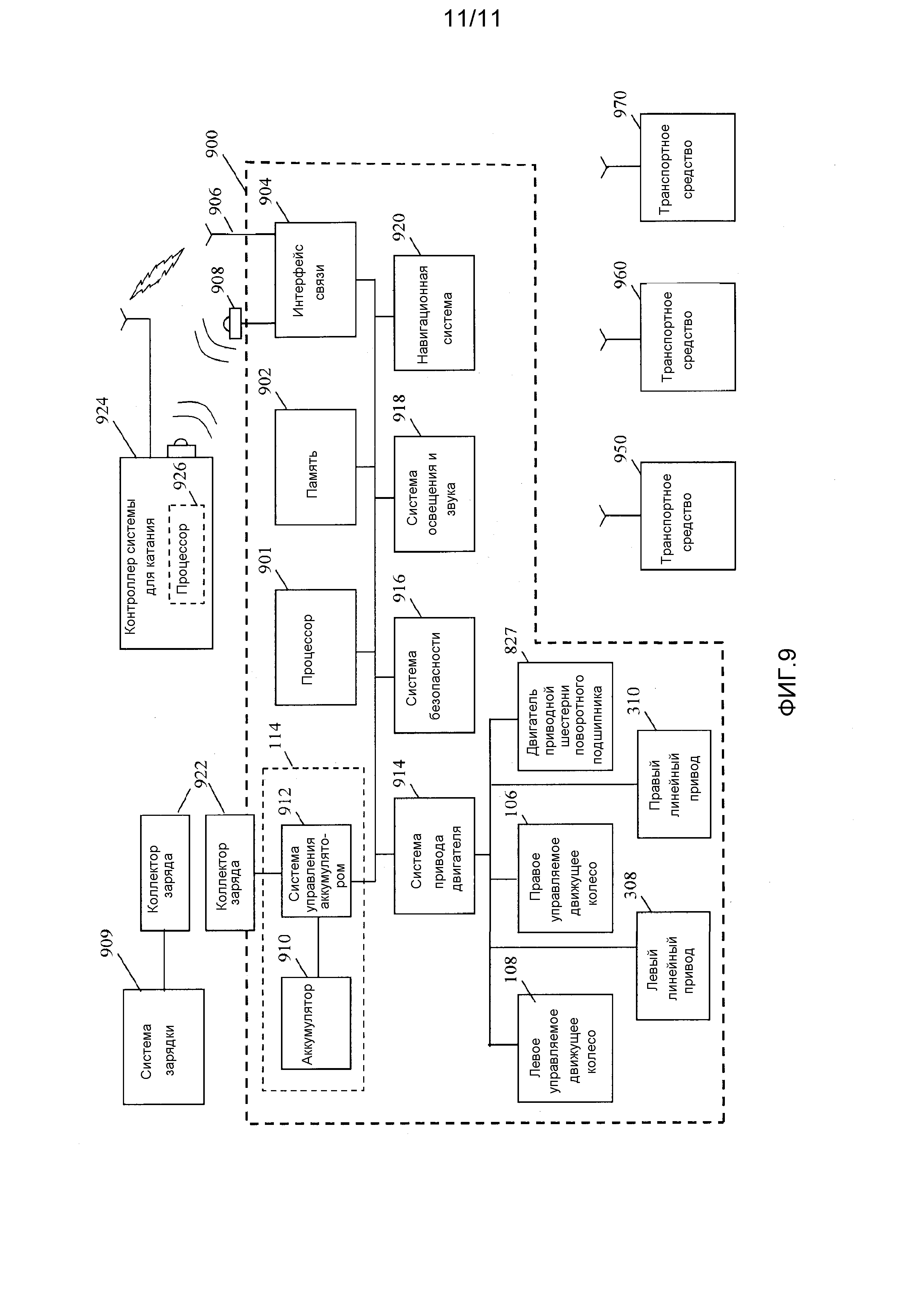
[0076] Фиг. 9 представляет собой блок-схему транспортного средства 900 и системы, в соответствии с вариантом выполнения изобретения. Транспортное средство 900 включает в себя контроллер или процессор 900 для выполнения команд, хранимых в памяти 902. Команды могут храниться на или в неизменяемой машиночитаемом носителе памяти 902. Транспортное средство включает в себя интерфейс 904 связи, который может связываться по беспроводной связи с другими интерфейсами связи через одно или более антенных 906 или инфракрасных 908 устройств или их эквиваленты. Интерфейс 904 связи транспортного средства 900 может работать на одном или более протоколах связи. Транспортное средство 900 является однозначно адресуемым через интерфейс 904 связи. Соответственно, контроллер 924 системы для катания, контролирующий множество транспортных средств в аттракционе для катания, не ограничивается подачей одной команды в одно и то же время всему множеству транспортных средств. Уникальная адресуемость одного транспортного средства 900 во множестве транспортных средств позволяет подавать и выполнять команду только одному транспортному средству 900. Таким образом, уникальная адресуемость каждого транспортного средства во множестве транспортных средств обеспечивает подачи команд одноадресного и многоадресного типа. То есть, команда может быть подана одному транспортному средству 900, подмножеству множества транспортных средств или всему множеству транспортных средств.
[0077] Транспортное средство 900 включает в себя аккумулятор 910, соединенный с системой 912 управления аккумулятором. Система 114 аккумулятора может соединяться с системой 909 зарядки с помощью использования контактных или бесконтактных соединений 922, известных специалисту в области техники. Транспортное средство включает в себя систему 914 привода двигателя. Система 914 привода двигателя приводит в движение различные двигатели транспортного средства 900. В состав двигателей включены левое и правое управляемые движущие колеса 104, 106; причем каждое управляемое движущее колесо 104, 106 имеет отдельные двигатели для управления и приведения в действие (приведения в движение); двигатель 827 (Фиг. 8) ведущей шестерни поворотного подшипника и двигатели левого и правого линейных приводов 308, 310. Транспортное средство также может включать в себя систему 916 безопасности, которая включает в себя различные компоненты безопасности (например, датчики открытия/закрытия двери и т.п.). Транспортное средство также включает в себя систему 918 освещения и звука, включающую в себя различные осветительные и звуковые компоненты.
[0078] Транспортное средство также может включать в себя навигационную систему 920, имеющую один или более навигационных датчиков 922. В предпочтительном варианте выполнения, транспортное средство использует свободный диапазон в системе навигации посредством сетки. Множество типов датчиков 922 может быть использовано индивидуально или в совокупности, например, магнитные датчики, оптические датчики и радиочастотные датчики. Навигационная система 920 может управлять и контролировать движение и направление управляемых движущих колес 104, 106 транспортного средства 900. Таким образом, транспортное средство 900 может быть выполнено с возможностью следования вдоль одного из множества курсов, которые могут быть заданы, без необходимости путей или встроенных проводов для навигации, связи или питания. В одном варианте выполнения, сравнение прогнозируемого местоположения с фактическим местоположением, которое может быть определено, например, на основе измерений, выполненных путем определений расстояний от различных неподвижных известных мест, позволяет навигационной системе выполнять контроль курса в реальном времени, чтобы определять, произошла ли навигационная ошибка во время шоу.
[0079] Другие типы навигационных систем 900 находятся в пределах объема охраны изобретения. Например, учитывая достаточную точность систем управления и движущих систем, транспортному средству 900 может и не требоваться контроль курса в реальном времени. Дополнительно или альтернативно, транспортное средство может использовать инерциальную навигационную систему или т.п. в качестве навигационной системы.
[0080] Настоящее изобретение сводится к созданию системы, содержащей множество однозначно адресуемых транспортных средств 900, 950, 960, 970 (где 950, 960, 970 являются подобными 900). Каждое из множества транспортных средств 900, 950, 960, 970 может индивидуально управляться по меньшей мере одним бортовым процессором (подобным 901), причем каждый из множества бортовых процессоров находится в беспроводной связи с по меньшей мере одним контроллером 924 системы для катания, который удален от транспортные средства и использует свой(и) собственный(ые) процессор(ы) 926. Контроллер 924 системы для катания может поддерживать ситуационную и позиционную осведомленность о множестве транспортных средств и осуществлять аварийное управление одним, всеми или любым подмножеством множества транспортных средств 900, 950, 960, 970 по беспроводной связи.
[0081] В пространстве аттракциона для катания, когда множество транспортных средств 900, 950, 960, 970 пересекают пространство аттракциона для катания одновременно, движения тангажа и крена пассажирских платформ каждого однозначно адресуемого транспортного средства могут быть синхронизированы с положением транспортного средства вдоль предопределенного маршрута по расстоянию и/или времени. Транспортное средство, система и способ работы транспортного средства и системы находят применение в индустрии аттракционов для катания парка развлечений, но изобретение не ограничивается этим. Описание, обеспеченное здесь, использует индустрию аттракционов для катания парка развлечений только в примерных целях, чтобы описывать варианты выполнения изобретения; однако изобретение не ограничивается индустрией аттракционов для катания парка развлечений и может находить применение в любом количестве других индустрий.
[0082] В соответствии со способом изобретения, транспортное средство 900 будет останавливаться, согласно команде от собственного процессора 901 транспортного средства, если возникает состояние, например, отказа системы или нарушения безопасности на транспортном средстве 900. Если это состояние существует, транспортное средство может оповещать контроллер 924 системы для катания об этой ситуации через интерфейс 904 связи и беспроводную передачу с помощью антенного 906 или инфракрасного 908 устройства. Контроллер 924 системы для катания для катания может определять, должны ли другие транспортные средства быть остановлены, например, чтобы избежать столкновения. Контроллер системы для катания, используя уникальные адреса каждого транспортного средства, может подавать команду остановки одному транспортному средству 950, если только одно транспортное средство находилось в опасности столкновения. Альтернативно, контроллер системы для катания, используя уникальные адреса каждого транспортного средства, может подавать команду остановки подмножеству транспортных средств 950, 960, если только это подмножество транспортных средств находилось в опасности столкновения. Альтернативно, контроллер системы для катания, используя уникальные адреса каждого транспортного средства, может подавать команду остановки всем транспортным средствам 950, 960, 970. Любое транспортное средство 900, 950, 960, 970 после получения команды, однозначно адресованной ему, может приходить к управляемой остановке.
[0083] Настоящее изобретение было описано выше в одном или более предпочтительных вариантах выполнения и одном или более альтернативных вариантах выполнения. Более того, были описаны различные аспекты настоящего изобретения. Специалисту в области техники не следует интерпретировать различные аспекты или варианты выполнения, как ограничивающие каким-либо образом, но как примерные. Очевидно, другие варианты выполнения находятся в пределах объема охраны настоящего изобретения. Объем охраны настоящего изобретения будет вместо этого определен приложенной формулой изобретения.
Реферат
Изобретение относится к транспортным средствам. Узел движения, который производит движения тангажа и крена, включает в себя нижнюю и верхнюю плиты. Поворотная муфта, имеющая верхний и нижний валы, проходящие от ее центра, соединена между верхней и нижней плитами. По меньшей мере два линейных привода соединены между плитами. Выдвижение и втягивание приводов поворачивает верхнюю плиту вокруг поворотной муфты относительно нижней плиты. Транспортное средство включает в себя два управляемых движущих колеса, соединенных с шасси. Нижняя пластина узла движений тангажа и крена, подобно только что описанному, соединяется с шасси через поворотный подшипник. Сиденье соединено с верхней плитой. Сиденье вращается относительно шасси через управляемое вращение поворотного подшипника относительно шасси. Сиденье может быть повернуто в требуемое положение в любом направлении относительно шасси независимо от направления, в котором управляемые движущие колеса перемещают шасси. В результате повышается надежность и увеличиваются функциональные возможности транспортного средства. 4 н. и 18 з.п. ф-лы, 13 ил.
Формула
нижнюю реактивную плиту;
верхнюю реактивную плиту, разнесенную на расстояние от нижней реактивной плиты;
поворотную муфту, имеющую верхний вал и нижний вал, проходящие от центра поворотной муфты и заканчивающиеся на соответственных концах верхнего и нижнего валов, причем конец верхнего вала соединен с верхней реактивной плитой, и конец нижнего вала соединен с нижней реактивной плитой; и
по меньшей мере два линейных привода, разнесенных на расстояние друг от друга и от поворотной муфты и соединенных на соответственных верхних концах с верхней реактивной плитой и на соответственных нижних концах с нижней реактивной плитой, и выполненных с возможностью выдвижения и втягивания для поворота верхней реактивной плиты вокруг поворотной муфты, чтобы производить движения тангажа и крена верхней реактивной плиты относительно нижней реактивной плиты.
шасси;
первое управляемое движущее колесо, соединенное с шасси и выполненное с возможностью вращения первого колеса в первом заданном направлении и вращения первого колеса с первой заданной скоростью;
второе управляемое движущее колесо, соединенное с шасси и выполненное с возможностью вращения второго колеса во втором заданном направлении и вращения второго колеса со второй заданной скоростью;
нижнюю реактивную плиту, соединенную с шасси;
верхнюю реактивную плиту, разнесенную на расстояние от нижней реактивной плиты;
поворотную муфту, имеющую верхний вал и нижний вал, проходящие от центра поворотной муфты и заканчивающиеся на соответственных концах верхнего и нижнего валов, причем конец верхнего вала прикреплен к верхней реактивной плите, и конец нижнего вала прикреплен к нижней реактивной плите; и
по меньшей мере два линейных привода, разнесенных друг от друга и от поворотной муфты и соединенных на соответственных верхних концах с верхней реактивной плитой и на соответственных нижних концах с нижней реактивной плитой, и выполненных с возможностью выдвижения и втягивания для поворота верхней реактивной плиты вокруг поворотной муфты, чтобы производить движения тангажа и крена верхней реактивной плиты относительно нижней реактивной плиты.
поворотный подшипник, прикрепленный к шасси и имеющий ведомую шестерню поворотного подшипника, вращаемую относительно шасси;
двигатель ведущей шестерни поворотного подшипника, имеющий вал, причем двигатель ведущей шестерни поворотного подшипника прикреплен к шасси;
ведущую шестерню поворотного подшипника, прикрепленную к валу, причем ведущая шестерня зацепляет ведомую шестерню поворотного подшипника и выполнена с возможностью вращения с заданной скоростью и направлением поворота;
причем нижняя реактивная плита соединена с шасси через поворотный подшипник путем крепления нижней реактивной плиты к поворотному подшипнику,
причем нижняя реактивная плита вращается вместе с поворотным подшипником и производит движение рыскания верхней реактивной плиты относительно шасси.
одновременной установки первого заданного направления и второго заданного направления равными идентичному заданному направлению θ, где θ находится в одном из диапазонов 0°<θ<180° и 180°<θ<360°; и одновременной установки первой заданной скорости равной второй заданной скорости.
контроллер;
память, соединенную с контроллером;
интерфейс связи, соединенный с контроллером и выполненный с возможностью связи с контроллером системы для катания, который удален от транспортного средства;
шасси;
аккумулятор, выполненный в качестве единственного источника энергии для работы транспортного средства;
независимо управляемые первое и второе управляемые движущие колеса, прикрепленные к шасси и выполненные с возможностью приведения в движение и управления транспортным средством согласно командам, подаваемым контроллером;
нижнюю реактивную плиту, соединенную с шасси;
верхнюю реактивную плиту, разнесенную на расстояние от нижней реактивной плиты;
поворотную муфту, имеющую верхний вал и нижний вал, проходящие от центра поворотной муфты и заканчивающиеся на соответственных концах верхнего и нижнего валов, причем конец верхнего вала прикреплен к верхней реактивной плите, и конец нижнего вала прикреплен к нижней реактивной плите; и
по меньшей мере два линейных привода, разнесенных друг от друга и от поворотной муфты и соединенных на соответственных верхних концах с верхней реактивной плитой и на соответственных нижних концах с нижней реактивной плитой, и выполненных с возможностью выдвижения и втягивания для поворота верхней реактивной плиты вокруг поворотной муфты, чтобы производить движения тангажа и крена верхней реактивной плиты относительно нижней реактивной плиты.
поворотный подшипник, прикрепленный к шасси и имеющий ведомую шестерню поворотного подшипника, вращаемую относительно шасси;
двигатель ведущей шестерни поворотного подшипника, имеющий вал, причем двигатель ведущей шестерни поворотного подшипника прикреплен к шасси и выполнен с возможностью вращения с заданной скоростью и направлением поворота;
ведущую шестерню поворотного подшипника, прикрепленную к валу, причем ведущая шестерня зацепляет ведомую шестерню поворотного подшипника;
причем нижняя реактивная плита соединена с шасси через поворотный подшипник путем крепления нижней реактивной плиты к поворотному подшипнику,
причем нижняя реактивная плита вращается вместе с поворотным подшипником и производит движение рыскания верхней реактивной плиты относительно шасси.
одновременной установки первого заданного направления и второго заданного направления равными идентичному заданному направлению θ, где θ находится в одном из диапазонов 0°<θ<180° и 180°<θ<360°; и
одновременной установки первой заданной скорости равной второй заданной скорости.
шасси;
первое движущее колесо, соединенное с шасси;
второе движущее колесо, соединенное с шасси и разнесенное на расстояние от первого движущего колеса;
поворотный подшипник, имеющий первую сторону, прикрепленную к шасси, и вторую сторону, содержащую ведомую шестерню поворотного подшипника, вращаемую относительно шасси;
двигатель, выполненный с возможностью вращения ведомой шестерни поворотного подшипника;
платформу, соединенную со второй стороной поворотного подшипника, причем платформа вращается относительно шасси под действием двигателя; и
сиденье, соединенное с платформой, причем сиденье имеет переднюю сторону и заднюю сторону, противоположную передней стороне;
причем передняя сторона сиденья может быть повернута в требуемое положение в любом направлении относительно шасси путем работы двигателя независимо от любого направления перемещения шасси.
Комментарии