Подвижный робот и способ управления им - RU2782395C1
Код документа: RU2782395C1
Чертежи








Описание
Область техники
[1] Настоящее изобретение относится к подвижному роботу и способу управления им, и, в частности, к подвижному роботу, способному очищать поверхность пола на основе вращения протирочной тряпки, установленной к поверхности пола при перемещении в области, и способу управления им.
Уровень техники
[2] В основном, перемещающийся робот сам перемещается в области для выполнения заданной работы.
[3] Например, робот-уборщик автоматически очищает посредством всасывания инородных веществ, таких как пыль, с поверхности пола. Кроме того, робот-газонокосилка подстригает газон при перемещении по территории, и робот для влажной очистки очищает поверхность пола с помощью протирочной тряпки. В некоторых случаях инородные вещества всасываются спереди подвижного робота, и протирочная тряпка установлена сзади подвижного робота для выполнения сухой и влажной очистки.
[4] Среди этих подвижных роботов робот для влажной очистки перемещается по поверхности при протирании поверхности пола для выполнения влажной очистки.
[5] Публикация заявки на патент Кореи № 10-2014-0015069 относится к роботу для очистки влажной тряпкой, который может точно и быстро выполнять влажную очистку влажной тряпкой посредством этапа смачивания и протирания, причем емкость для воды образована в пластине для протирочной ткани, и влажная тряпка имеет часть, покрытую водой, и часть для протирания водой, так что очистка может выполняться влажной тряпкой с использованием этапа смачивания и протирания.
[6] Поскольку робот-уборщик имеет небольшое трение с поверхностью пола, поскольку на поверхность пола не действует заданная величина давления, инородные вещества не удаляются эффективно, и, таким образом, очистка не может выполняться эффективно.
[7] При этом, публикация заявки на патент Кореи № 2019-007608 относится к роботу-уборщику, который включает в себя первый и второй вращающиеся элементы, способные закреплять устройство для очистки, и первый и второй вращающиеся валы для вращения каждого вращающегося элемента, таким образом, обеспечивая перемещение на основании вращения вращающихся элементов.
[8] Такой известный робот-уборщик имеет проблему в том, что он не может справиться с проскальзыванием, которое возникает во время влажной очистки.
[9] В известном роботе-уборщике трение о поверхность пола уменьшена в соответствии с типом инородных веществ, имеющихся на поверхности пола, так что известный робот-уборщик может скользить без очистки инородных веществ. Даже если некоторые инородные вещества очищены, вследствие проскальзывания могут остаться остатки инородных веществ.
[10] Когда происходит проскальзывание, очистка не может быть выполнена, и текущее местоположение не может быть определено, и, таким образом, невозможно нормально управлять перемещением.
[11] Когда невозможно определить текущее местоположение, карта не может быть использована, таким образом, необходимо снова определить текущее местоположение при перемещении во всей области или восстановить карту.
[12] Следовательно, известный робота-уборщик имеет проблему в том, что он не может эффективно удалять инородные вещества, эффективно выполнять очистку и управлять перемещением на основании местоположения. Следовательно, необходимо найти решение этой проблемы.
Сущность изобретения
[13] Аспект настоящего изобретения описывает подвижный робот и способ управления им для управления основным корпусом при вращении протирочной тряпки с помощью электродвигателя, таким образом, выполняя влажную очистку на поверхности пола с увеличенным трением.
[14] Другой аспект настоящего изобретения описывает подвижный робот и способ управления им для анализа заданной траектории перемещения и фактической траектории перемещения для определения аномального перемещения.
[15] Другой аспект настоящего изобретения описывает подвижный робот и способ управления им для определения отклонения основного корпуса от траектории перемещения для анализа причины аномального перемещения и определения состояния пола.
[16] Другой аспект настоящего изобретения описывает подвижный робот и способ управления им для сохранения местоположения, в котором происходит аномальное перемещение, и повторного выполнения очистки.
[17] Другой аспект настоящего изобретения описывает подвижный робот и способ управления им для выполнения повторной очистки в соответствии с загрязнением протирочной тряпки инородными веществами.
[18] Другой аспект настоящего изобретения описывает подвижный робот и способ управления им для вывода уведомления в соответствии с аномальным перемещением.
[19] Цели настоящего изобретения не ограничиваются вышеупомянутыми целями, и другие цели, которые не упомянуты, будут ясно понятны специалистам в данной области техники из нижеследующего описания.
[20] Для достижения вышеуказанной цели подвижный робот и способ управления им в соответствии с настоящим изобретением перемещает основной корпус на основании вращения протирочной тряпки с помощью электродвигателя и очищает поверхность пола за счет вращения протирочной тряпки.
[21] В настоящем изобретении установленная траектория перемещения и траектория перемещения, по которой фактически перемещается основной корпус, могут сравниваться для определения отклонения от траектории перемещения.
[22] В настоящем изобретении изменение местоположения основного корпуса может быть проанализировано для определения того, что отклоняется ли основной корпус от траектории перемещения.
[23] В настоящем изобретении может быть сохранено местоположение, в котором происходит аномальное перемещение с отклонением от траектории перемещения.
[24] В настоящем изобретении причина отклонения может быть проанализирована на основании данных об отклонении от траектории перемещения.
[25] В настоящем изобретении состояние пола может быть определено на основании данных об отклонении от траектории перемещения.
[26] В настоящем изобретении могут накапливаться данные об отклонении от траектории перемещения, и повторная очистка может выполняться посредством изменения схемы перемещения или траектории перемещения.
[27] В настоящем изобретении местоположение, в котором происходит аномальное перемещение, может быть повторно очищено.
[28] В настоящем изобретении описан подвижный робот и способ управления им для выполнения повторной очистки в соответствии с загрязнением протирочной тряпки инородными веществами.
[29] В настоящем изобретении замена протирочной тряпки может быть запрошена посредством уведомления.
[30] В настоящем изобретении уведомление может выдаваться, когда происходит аномальное перемещение.
[31] В настоящем изобретении компенсирующее перемещение может выполняться, когда происходит анормальное перемещение.
[32] В соответствии с аспектом настоящего изобретения описан подвижный робот, включающий в себя основной корпус, выполненный с возможностью перемещения в области, вращающуюся швабру, содержащую первые вращающиеся пластины и вторые вращающиеся пластины, причем первая протирочная тряпка установлена на первой вращающейся пластине, и вторая протирочная тряпка установлена на второй вращающейся пластине, устройство для очистки, выполненное с возможностью перемещения основного корпуса в соответствии с вращением вращающейся швабры при удалении инородных веществ с поверхности пола, и контроллер выполнен с возможностью установки схемы перемещения для области и траектории перемещения в соответствии со схемой перемещения, определения состояния перемещения посредством расчета изменения местоположения основного корпуса во время перемещения, вывода уведомления в соответствии с возникновением при аномальном перемещении отклонения от траектории перемещения и установки повторной очистки для очистки местоположения, где происходит аномальное перемещение.
[33] В соответствии с другим аспектом настоящего изобретения описан способ управления подвижным роботом, причем способ включает в себя приведение в действие вращающейся швабры, содержащей первые вращающиеся пластины и вторые вращающиеся пластины, причем первая протирочная тряпка установлена на первой вращающейся пластине, и вторая протирочная тряпка установлена на второй вращающейся пластине, перемещение с помощью основного корпуса, перемещение на основании траектории перемещения в соответствии с заданной схемой перемещения при удалении инородных веществ с поверхности пола в соответствии с вращением вращающейся швабры, определение положения перемещения посредством расчета изменения местоположения основного корпуса, когда происходит приведение в движение с отклонением от траектории перемещения, сохранение информации о местоположении, где происходит аномальное перемещение, вывод уведомления об аномальном перемещении, и установку повторной очистки для повторной очистки местоположения, где происходит аномальное перемещение.
[34] Способ может дополнительно включать в себя, когда отклонение от траектории перемещения происходит во время нормального перемещения, определение того, что аномальное перемещение происходит вследствие проскальзывания, вызванного инородными веществами на полу.
[35] В подвижном роботе и способе управления им в соответствии с настоящим изобретением, так как местоположение, где происходит отклонение от траектории из-за инородного вещества на поверхности пола, и местоположение отклонения повторно очищается, можно эффективно удалять инородные вещества.
[36] В соответствии с настоящим изобретением причина аномального перемещения вследствие отклонения от траектории перемещения может быть проанализирована и принята во внимание при следующем перемещении, таким образом, повышая эффективность очистки.
[37] В соответствии с настоящим изобретением аномальное перемещение может быть проанализировано, и траектория перемещения изменена при следующей очистке, таким образом, повышая эффективность очистки.
[38] В соответствии с настоящим изобретением можно определить местоположение, которое изменено в соответствии с проскальзыванием основного корпуса.
[39] В соответствии с настоящим изобретением причина аномального перемещения может быть проанализирована для определения состояния пола.
[40] В соответствии с настоящим изобретением пользователь может определять состояние пола посредством уведомления.
[41] В соответствии с настоящим изобретением посредством запроса замены протирочной тряпки возможно вторичное загрязнение пола вследствие загрязнения протирочной тряпки.
[42] В соответствии с настоящим изобретением можно запросить замену протирочной тряпки, таким образом, повышая эффективность очистки.
[43] В соответствии с настоящим изобретением можно обеспечить комфортную среду в помещении посредством повышения эффективности очистки.
Краткое описание чертежей
[44] Фиг.1 - вид в перспективе подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[45] Фиг.2 - вид нижней поверхности подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[46] Фиг.3 - вид в перспективе с пространственным разделением элементов узла швабры, включающего в себя вращающуюся швабру на фиг.2.
[47] Фиг.4 - блок-схема, кратко показывающая конфигурацию подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[48] Фиг.5 - блок-схема, кратко показывающая конфигурацию устройства для очистки подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
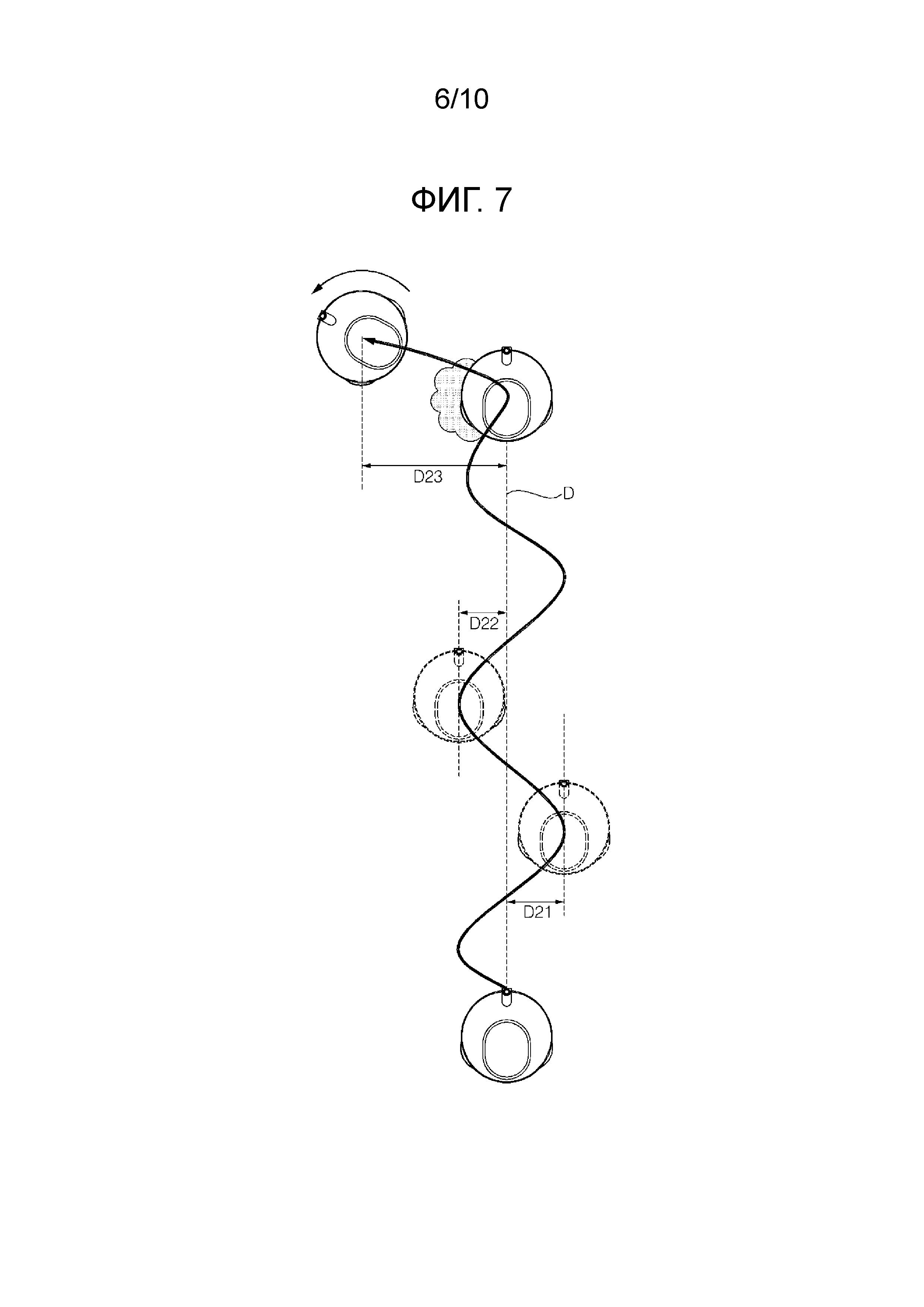
[49] Фиг.6 и 7 - диаграммы, на которые ссылаются для объяснения траектории перемещения в соответствии с состоянием пола подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[50] Фиг.8 - диаграмма, показывающая карту, на которой отображено аномальное перемещение подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[51] Фиг.9 и 10 - примеры видов, на которые ссылаются для объяснения перемещения подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[52] Фиг.11 - диаграмма, на которую ссылаются для объяснения времени перемещения в соответствии с аномальным перемещением подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[53] Фиг.12 - диаграмма, на которую ссылаются для объяснения аномального перемещения подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
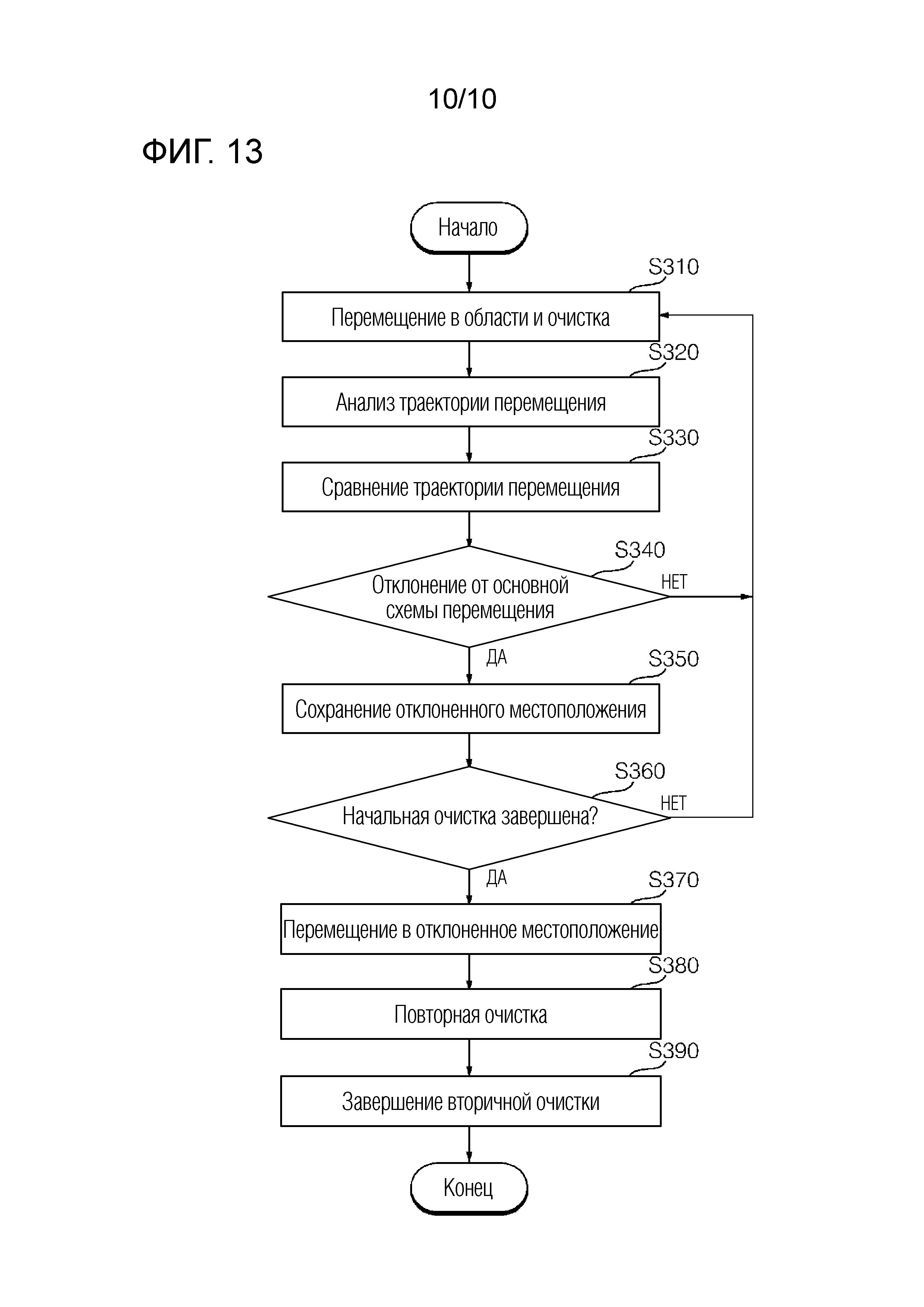
[54] Фиг.13 - блок-схема, показывающая способ управления подвижным роботом в соответствии с вариантом осуществления настоящего изобретения.
Описание примеров осуществления изобретения
[55] Преимущества и признаки настоящего изобретения и способ их достижения будут ясно понятны из вариантов осуществления, подробно описанных ниже со ссылкой на сопроводительные чертежи. Однако, настоящее изобретение не ограничивается нижеследующими вариантами осуществления и может быть осуществлено в различных формах. Варианты осуществления представлены только для полного изобретения настоящего изобретения и для полного изобретения объема изобретения для специалистов в данной области техники, к которой относится настоящее изобретение. Настоящее изобретение определено только объемом формулы изобретения. Во всей описании подобные ссылочные позиции относятся к подобным элементам. Конфигурация управления настоящего изобретения может состоять из, по меньшей мере, одного процессора.
[56] Фиг.1 представляет собой вид в перспективе подвижного робот в соответствии с вариантом осуществления настоящего изобретения, а фиг.2 - вид нижней поверхности подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[57] Как показано на фиг.1 и 2, перемещающийся робот 1 в соответствии с вариантом осуществления настоящего изобретения перемещается в пределах области и удаляет инородные вещества с пола во время перемещения.
[58] Кроме того, подвижный робот 1 аккумулирует заряженную энергию, подаваемую с зарядного стенда 2, в батарее (не показана) для перемещения в области.
[59] Подвижный робот 1 включает в себя основной корпус 10 для выполнения соответствующей работы, детектор препятствий (не показан), расположенный на передней поверхности основного корпуса 10 для обнаружения препятствия, и устройство 170 получения изображения для захвата изображения. Основной корпус 10 включает в себя корпус, который образует область для размещения элементов основного корпуса 10, который образует внешний вид основного корпуса и внутреннюю область для размещения элементов основного корпуса 10, вращающуюся швабру 80, способную вращаться, ролик 89 для содействия перемещению основного корпуса 10 и очистке, и клемму 99 для зарядки, через которую энергия для зарядки получают с зарядного стенда 2.
[60] Кроме того, подвижный робот 1 может дополнительно включать в себя емкость 32 для воды, расположенную внутри основного корпуса 10, для хранения воды, насос (не показан) для подачи воды, хранящейся в емкости для воды, на вращающуюся швабру 80 и соединительный шланг (не показан), который образует соединительный канал потока между насосом и емкостью 32 для воды или между насосом и вращающейся шваброй 80. В некоторых случаях дополнительно может быть установлен клапан для управления подачей воды.
[61] Вращающаяся швабра 80 расположена на корпусе и образована к нижней поверхности таким образом, чтобы протирочная тряпка была съемной. Вращающаяся швабра симметрично расположена на нижней стороне основного корпуса 10. Вращающаяся швабра 80 расположена перед емкостью 32 для воды.
[62] Вращающаяся швабра 80 перемещается с помощью силы трения с нижней поверхностью, силы трения, которая генерируется в соответствии с вращением по часовой стрелке или против часовой стрелки, если смотреть сверху, и вращающаяся швабра очищает пол. Вращающаяся швабра 80 выполнена с возможностью вращения вокруг оси вращения, которая проходит, по существу, в вертикальном направлении.
[63] Вращающаяся швабра 80 включает в себя первую вращающуюся пластину 81 и вторую вращающуюся пластину 82, так что корпус 10 перемещается по полу области посредством вращения.
[64] Основной корпус 10 перемещается вперед, назад, влево и вправо, когда первая и вторая вращающиеся пластины 81 и 82 вращающейся швабры 80 вращаются вокруг оси вращения. Кроме того, по мере вращения первой вращающейся пластины и второй вращающейся пластины инородные вещества удаляются с нижней поверхности за счет закрепленной протирочной тряпки, и основной корпус 10 выполняет влажную очистку.
[65] Основной корпус 10 может включать в себя приводной узел (не показан) для приведения в действие первой вращающейся пластины 81 и второй вращающейся пластины 82. Приводной узел может включать в себя, по меньшей мере, один электродвигатель.
[66] Нижние поверхности вращающейся швабры 80 могут быть выполнены с возможностью наклона, соответственно.
[67] Нижняя поверхность первой вращающейся пластины 81 образует наклон вниз в направлении влево в целом. Нижняя поверхность второй вращающейся пластины 82 в целом образует наклон вниз в направлении вправо. Нижняя поверхность первой вращающейся пластины 81 образует самую нижнюю точку на левой стороне. Нижняя поверхность первой вращающейся пластины 81 образует самую высокую точку на правой стороне. Нижняя поверхность второй вращающейся пластины 82 образует самую нижнюю точку на правой стороне. Нижняя поверхность второй вращающейся пластины 82 образует самую высокую точку на левой стороне. Например, когда первая вращающаяся пластина 81 вращается с первой скоростью вращения в первом направлении, и вторая вращающаяся пластина 82 вращается с первой скоростью вращения во втором направлении, основной корпус 10 может перемещаться вперед и назад. Кроме того, основной корпус 10 может перемещаться влево и вправо посредством установки разных скоростей вращения для первой и второй вращающихся пластин или посредством установки одинакового направления вращения для первой и второй вращающихся пластин.
[68] Кроме того, основной корпус 10 может дополнительно включать в себя наклонную раму (не показана). Наклонная рама расположена с возможностью наклона в пределах заданного углового диапазона относительно вращающейся швабры 80. Наклонная рама обеспечивает изменение угла наклона в соответствии с состоянием пола. Наклонная рама может выполнять функцию подвески (уменьшая вибрацию вверх и вниз одновременно при поддержании веса) вращающейся швабры 80.
[69] Ролик 89 вращается во время перемещения и собирает инородные вещества с нижней поверхности и хранит собранные инородные вещества в пылесборнике (не показан).
[70] На верхней поверхности корпуса может быть расположена панель управления, включающая в себя оператор (не показан), который принимает различные команды для управления подвижным роботом 1 от пользователя.
[71] Кроме того, устройство 170 получения изображения и детектор препятствий (не показаны) расположены на передней поверхности или верхней поверхности основного корпуса.
[72] Детектор препятствий обнаруживает препятствие, расположенное в направлении перемещения или вокруг основного корпуса 10.
[73] Устройство 170 получения изображения захватывает изображение внутренней области. На основании изображения, захваченного с помощью устройства получения изображения, можно не только обнаружить препятствие вокруг основного корпуса, но также контролировать внутреннюю область.
[74] Устройство 170 получения изображения расположено под заданным углом к направлению вперед и вверх для фотографирования области вперед и вверх от подвижного робота. Кроме того, устройство получения изображений способно осуществлять фотосъемку в диапазоне 360°.
[75] Устройство получения изображения может дополнительно включать в себя дополнительную камеру для фотографирования передней области. Устройство получения изображения может быть расположено на верхней стороне основного корпуса 10 для обращения к потолку, и в некоторых случаях может быть установлено множество камер. Кроме того, устройство получения изображения может дополнительно включать в себя дополнительную камеру для фотографирования нижней поверхности.
[76] Подвижный робот 1 может дополнительно включать в себя средство получения местоположения (не показано) для получения информации о текущем местоположении. Подвижный робот 1 может определять текущее местоположение посредством включения GPS и UWB. Кроме того, подвижный робот 1 может определять текущее местоположение с помощью изображения.
[77] Основной корпус 10 может включать в себя перезаряжаемую батарею (не показана), и поскольку клемма 99 для зарядки батареи может быть соединена с источником питания общего назначения (например, с домашней розеткой), или основной корпус 10 соединен с зарядным стендом 2, соединенным с источником питания общего назначения, клемма для зарядки может быть электрически соединена с источником питания общего назначения через контакт с клеммой 29 зарядного стенда, так что батарея может заряжаться за счет расхода энергии на подзарядку, подаваемой на основной корпус 10.
[78] На электрические элементы, входящие в состав подвижного робота 1, может подаваться питание от батареи, и, таким образом, в состоянии, в котором батарея заряжена, подвижный робот 1 способен перемещаться самостоятельно при электрическом разъединении с источником питания общего назначения.
[79] Ниже, подвижный робот 1 будет описан с примером подвижного робота для влажной очистки, но настоящее изобретение этим не ограничивается, и может быть применен любой робот, способный воспринимать звук при автономном перемещении в области.
[80] Вращающаяся швабра 80 включает в себя первую вращающуюся пластину 81 и вторую вращающуюся пластину 82.
[81] Протирочные тряпки 91 и 92 и 90 могут быть закреплены на первой вращающейся пластине 81 и второй вращающейся пластине 82, соответственно.
[82] Вращающаяся швабра 80 выполнена таким образом, что протирочные тряпки могут быть закреплены с возможностью съема. Вращающаяся швабра 80 может включать в себя крепежные элементы для закрепления протирочных тряпок на первой вращающейся пластине 81 и второй вращающейся пластине 82, соответственно. Например, крепежный элемент, такой как липучка, и установочный элемент, могут быть установлены на вращающейся швабре 80 таким образом, чтобы закрепить и зафиксировать протирочную тряпку. Кроме того, вращающаяся швабра 80 может дополнительно включать в себя раму для протирочной тряпки (не показана) в качестве дополнительного вспомогательного средства для закрепления протирочных тряпок на первой вращающейся пластине 81 и второй вращающейся пластине 82.
[83] Протирочная тряпка 90 впитывает воду и удаляет инородные вещества за счет трения с нижней поверхностью. Протирочная тряпка 90 может быть выполнена из микрофибры или тканевой прокладки, и может быть использован такой материал, как хлопчатобумажная ткань или смешанная хлопчатобумажная ткань. Можно использовать любую протирочную тряпку, если она содержит влагу в конкретной пропорции или более и имеет заданную плотность ткани, и материал протирочной тряпки не ограничен.
[84] На протирочную тряпку 90 подается вода из емкости 32 для воды по соединительному каналу потока. Вода может подаваться из емкости 32 для воды на протирочную тряпку 90 через соединительный канал (не показан) за счет приведения в действие насоса.
[85] Протирочная тряпка 90 имеет круглую форму.
[86] Форма протирочной тряпки 90 не ограничивается чертежами и может быть выполнена в виде квадрата, многоугольника или тому подобного, но предпочтительно, чтобы протирочная тряпка имела форму, которая не препятствует повороту первой и второй вращающихся пластин посредством принятия во внимание вращения первой и второй вращающихся пластин. Кроме того, форма протирочной тряпки может быть изменена на круг с помощью рамы для протирочной тряпки, которая выполнена отдельно.
[87] Вращающаяся швабра 80 выполнена таким образом, что при установке протирочной тряпки 90 протирочная тряпка входит в контакт с нижней поверхностью. Вращающаяся швабра 80 выполнена с учетом толщины протирочной тряпки таким образом, что расстояние между первой вращающейся пластиной и второй вращающейся пластиной изменяется в соответствии с толщиной протирочной тряпки.
[88] Вращающаяся швабра 80 дополнительно включает в себя элемент, который регулирует расстояние между корпусом и вращающейся пластиной таким образом, что протирочная тряпка и нижняя поверхность входят в контакт друг с другом, и который вызывает давление, оказываемое на первую и вторую вращающиеся пластины к нижней поверхности.
[89] Фиг.3 - вид в перспективе с пространственным разделением элементов узла швабры, включающего в себя вращающуюся швабру подвижного робота на фиг.2.
[90] Как показано на фиг.3, вращающаяся швабра 80 включена в узел 40 швабры.
[91] Узел 40 швабры включает в себя, по меньшей мере, одну протирочную тряпку 90, 41, 411, выполненную с возможностью протирания нижней поверхности при вращении, и, по меньшей мере, одну вращающуюся швабру 80, выполненную с возможностью вхождения в контакт с нижней частью при вращении в направлении по часовой стрелке или в направлении против часовой стрелки, если смотреть сверху.
[92] Вращающаяся швабра включает в себя первую вращающуюся пластину 81, 41a и вторую вращающуюся пластину 82, 41b. В этом варианте осуществления вращающаяся швабра 80 выполнена с возможностью вращения вокруг оси Osa, Osb вращения, которая проходит, по существу, в вертикальном направлении.
[93] Узел 40 швабры расположен под основным корпусом 10. Модуль 40 карты расположен за узлом 50 сбора.
[94] Каждая из первой вращающейся пластины 41a и второй вращающейся пластины 41b включает в себя протирочную тряпку 411, вращающуюся пластину 412 и вращающийся вал 414. Каждая из первой вращающейся пластины 41a и второй вращающейся пластины 41b включает в себя узел 413 приема подачи воды. Каждая из первой вращающейся пластины 41a и второй вращающейся пластины 41b содержит ведомый шарнир 415. Протирочная тряпка 411, вращающаяся пластина 412, вращающийся вал 414, участок 413 для приема воды и ведомый шарнир 415, который будет описан ниже, можно понимать как элементы, включенные в каждую из первой вращающейся пластины 41a и второй вращающейся пластины 41b.
[95] Основной корпус 10 и модуль 40 карты могут быть соединены с возможностью разъема друг с другом.
[96] Положение, в котором основной корпус 10 и узел 40 швабры соединены друг с другом, может называться «соединенным положением». Кроме того, положение, в котором основной корпус 10 и узел 40 швабры отделены друг от друга, может называться «разделенным положением». Подвижный робот 1 включает в себя узел отделения (не показан), который зацепляет с возможностью отсоединения узел швабры с основным корпусом. Узел отделения может расцеплять узел 40 швабры и основной корпус 10 в соединенном положении. Узел отделения работает таким образом, что узел 40 швабры и основной корпус 10 отсоединяются друг от друга и закрепляются друг с другом. Узел отсоединения может принудительно зацеплять основной модуль 10 с основным модулем 10 в разделенном положении. Узел отделения может быть расположен поперек зазора между емкостью 32 для воды и батареей Bt.
[97] Подвижный робот 1 включает в себя основание (не показано), которое образует нижнюю поверхность основного корпуса 10. Основание образует нижнюю поверхность, переднюю поверхность, заднюю поверхность, левую поверхность и правую поверхность основного корпуса 10. Узел 40 швабры соединен с основанием. Узел сбора (не показан) соединен с основанием. Контроллер 110 и батарея Bt расположены во внутренней области, образованной корпусом 31 и основанием.
[98] Подвижный робот 1 включает в себя кожух 42 узла, который образует внешний вид узла 40 швабры. Кожух 42 узла расположен под корпусом 10.
[99] Узел 40 швабры включает в себя пару установочных участков основного корпуса (не показаны), которые расположены на расстоянии друг от друга. Пара установочных участков основного корпуса соответствует паре вращающихся швабр 41a и 41b. Пара установочных участков основного корпуса соответствует паре установочных участков узла (не показаны).
[100] Установочный участок узла образует отверстие для шарнира (не показано), в котором открыт, по меньшей мере, участок ведущего шарнира (не показан). Ведущий шарнир (не показан) может быть установлен посредством прохождения через отверстие для шарнира. Ведущий шарнир соединен с ведомым шарниром 415 для передачи движущей силы приводного узла (не показан) вращающейся швабре.
[101] Поверхность одного из установочного участка узла и установочного участка корпуса содержит выступающей зацепляющей участок (не показан), и поверхность другого содержит зацепляемый участок 435, 436, который утоплен для зацепления с зацепляющим участком в соединенном положении.
[102] Установочный участок 43 основного корпуса включает в себя верхнюю часть 431, образующую верхнюю поверхность. Верхняя часть 431 обращена вверх. Верхняя часть 431 может быть образована горизонтально. Верхняя часть 431 расположена над периферийной частью 433.
[103] Установочный участок 43 основного корпуса включает в себя периферийную часть 433, которая расположена по окружности верхней части 431. Периферийная часть 433 образует наклон, который проходит между верхней поверхностью кожуха 42 узла и верхней частью 431. Периферийная часть 433 имеет наклон, который увеличивается от верхней поверхности кожуха 42 узла к верхней части 431. Периферийная часть 433 расположена окружающей верхнюю часть 431.
[104] Установочный участок 43 основного корпуса включает в себя зацепленную поверхность 433a, которая контактирует с зацепляющей поверхностью 363a в соединенном положении. Пара установочных участков 43 основного корпуса включает в себя пару зацепленных поверхностей 433a. Пара зацепленных поверхностей 433a расположена на левой и правой сторонах для обращения под наклоном друг к другу. Пара зацепленных поверхностей 433a расположена между парой установочных участков 43 основного корпуса. Зацепленная поверхность 433a расположена в области периферийной части 433 одного установочного участка 43 основного корпуса, области, которая находится близко к другому установочному участку 43 основного корпуса. Зацепленная поверхность 433a расположена в области, относительно близкой к центральной вертикальной плоскости Po в периферийной части 433. Зацепленная поверхность 433a образует участок периферийной части 433.
[105] Установочный участок 43 основного корпуса имеет приводное отверстие 434, образованное в нем, отверстие, через которое открыт, по меньшей мере, участок ведомого шарнира 415. Приводное отверстие 434 образовано в верхней части 431. В соединенном положении ведущий шарнир может быть вставлен в приводное отверстие 434 и соединено с ведомым шарниром 415.
[106] Узел 40 швабры включает в себя, по меньшей мере, одну вращающуюся швабру 80. По меньшей мере, одна вращающаяся швабра 80 может включать в себя пару вращающихся швабр 80. Пара вращающихся швабр 80 расположена симметрично слева и справа относительно виртуальной центральной вертикальной плоскости. Первая вращающаяся пластина 41a и вторая вращающаяся пластина 41b расположены симметрично друг другу.
[107] Нижняя поверхность первой вращающейся пластины 41a и нижняя поверхность второй вращающейся пластины 41b расположены с возможностью наклона, соответственно. Нижняя поверхность первой вращающейся пластины 41a образует наклон, который в целом направлен вниз в направлении влево. Нижняя поверхность второй вращающейся пластины 41b образует наклон, который в целом направлен вниз в направлении вправо.
[108] Нижняя поверхность первой вращающейся пластины 41a образует самую нижнюю точку на левой стороне. Нижняя поверхность первой вращающейся пластины 41a образует самую высокую точку на правой стороне. Нижняя поверхность второй вращающейся пластины 41b образует самую нижнюю точку на правой стороне. Нижняя поверхность второй вращающейся пластины 41b образует самую высокую точку на левой стороне.
[109] Перемещение подвижного робота 1 осуществляется за счет трения с землей, которое генерируется модулем 40 карты.
[110] Узел 40 швабры может генерировать «трение при перемещении вперед» для перемещения основного корпуса 10 вперед или «трение при перемещении назад» для перемещения основного корпуса назад. Узел 40 швабры может генерировать «трение при левом моменте» для поворота основного корпуса 10 влево или «трение при правом моменте» для поворота основного корпуса 10 вправо. Узел 40 швабры может генерировать трение посредством сочетания любого трения при перемещении вперед и трения при перемещении назад и любого из трения при левом моменте и трения при правом моменте.
[111] Для генерации силы трения при перемещении вперед модуль 40 карты может вращать первую вращающуюся пластину 41a с заданными оборотами в минуту R1 в первом направлении вперед и вторую вращающуюся пластину 41b с заданными оборотами в минуту R1 во втором направлении вперед.
[112] Для генерации силы трения при перемещении назад узел 40 швабры может вращать первую вращающуюся пластину 41a с заданными оборотами в минуту в первом обратном направлении и вращает вторую вращающуюся пластину 41b с заданными оборотами в минуту R2 во втором обратном направлении.
[113] Вращающаяся швабра 80 включает в себя ведомый шарнир 415, который вращается в зацеплении с ведущим шарниром. Ведущий шарнир открыт на наружную сторону основного корпуса 10. По меньшей мере, участок ведомого шарнира 415 открыт на наружную сторону узла 40 швабры.
[114] В разделенном положении ведущий шарнир и ведомый шарнир 415 отделены друг от друга. В соединенном положении ведущий шарнир и ведомый шарнир 415 зацеплены.
[115] Один из ведущего шарнира и ведомого шарнира 415 включает в себя множество ведущих выступов (не показаны), расположенных в направлении вдоль окружности вокруг оси вращения одного шарнира, и другой шарнир имеет множество ведущих канавок 415, образованных на нем, которые расположены в направлении вдоль окружности вокруг оси вращения другого шарнира.
[116] Множество ведущих выступов расположены на заданном расстоянии друг от друга. Множество ведущих канавок 415h расположены на заданном расстоянии друг от друга. В соединенном положении ведущие выступы выполнены с возможностью вставки в ведущие канавки 415h.
[117] Один из ведущего шарнира и ведомого шарнира 415 включает в себя множество ведущих выступов 65a, расположенных на расстоянии друг от друга в направлении вдоль окружности вокруг осей вращения одного шарнира, и другой шарнир включает в себя множество противоположных выступов 415a, расположенных на расстоянии друг от друга в направлении вдоль окружности вокруг оси вращения другого шарнира. Множество противоположных выступов 415a выступает в вышеупомянутом направлении.
[118] Выступающие концы противоположных выступов 415a образованы закругленными. Выступающие концы противоположных выступов 415a образованы закругленными по направлению, в котором расположено множество противоположных выступов 415a. Каждый из выступающих концов противоположных выступов 415a имеет угловой участок, закругленный к противоположным выступам 415a относительно центральной оси направления выступа. Соответственно, когда разделенное положение изменяется на соединенное положение, ведущие выступы 65a могут плавно перемещаться по закругленным выступающим концам противоположных выступов 415a и вставляться в ведущие канавки 415h.
[119] В этом варианте осуществления ведущий шарнир включает в себя ведущие выступы 65a, и ведомый шарнир 415 образует ведущие канавки 415h. В этом варианте осуществления ведомый шарнир 415 включает в себя противоположные выступы 415a. Нижеследующее описание основано на этом варианте осуществления.
[120] Ведомый шарнир 415 закреплен на верхнем конце вращающегося вала 414. Ведомый шарнир 415 включает в себя ведомый участок 415b вала, закрепленный на вращающемся валу. Ведомый шарнир 415 включает в себя противоположные выступы 415a, выступающие от ведомого участка 415b вала. Противоположные выступы 415a выступают от ведомого участка 415b вала в одном из направлений вверх и вниз, которое направлено к ведущему шарниру.
[121] Кожух 42 узла соединяет пару вращающихся швабр 41a, 41b. С помощью кожуха 42 узла пара вращающихся швабр 41a, 41b отделяется вместе от корпуса 10 и соединяется вместе с корпусом 10. Установочный участок 43 основного корпуса расположен над кожухом 42 узла. Вращающаяся швабра 80 может поддерживаться с возможностью вращения внутри кожуха 42 узла. Вращающаяся швабра 80 может быть размещена посредством прохождения через кожух 42 узла.
[122] Кожух 42 узла может включать в себя верхнюю крышку 421, образующую верхнюю часть, и нижнюю крышку 423, образующую нижнюю часть. Верхняя крышка 421 и нижняя крышка 423 соединены друг с другом. Верхняя крышка 421 и нижняя крышка 423 образуют внутреннюю область для размещения участка вращающейся швабры 80.
[123] Узел 47, 48 и 49 подвески может быть расположен в кожухе 42 узла. Узел 47, 48 и 49 подвески может быть расположен во внутренней области, образованной верхней крышкой 421 и нижней крышкой 423. Узел 47, 48 и 49 подвески поддерживает вращающийся вал 414 для обеспечения перемещения вверх и вниз в пределах заданного диапазона. Узлы 47, 48 и 49 подвески в соответствии с данным вариантом осуществления включают в себя наклонную раму 47, наклонный вал 48 и упругий элемент 49.
[124] Кожух 42 узла может включать в себя ограничитель, который ограничивает диапазон вращения наклонной рамы 47.
[125] Ограничитель может включать в себя нижний ограничитель 427, который ограничивает диапазон поворота наклонной рамы 47 вниз. Нижний ограничитель 427 может быть расположен в кожухе 42 узла. Нижний ограничитель 427 выполнен с возможностью контакта с контактным участком 477 нижнего ограничителя в положении, в котором наклонная рама 47 повернута до максимума в направлении вниз. В положении, в котором подвижный робот 1 надлежащим образом расположен на наружной горизонтальной поверхности, контактный участок 477 нижнего ограничителя расположен на расстоянии от нижнего ограничителя 427. В положении, в котором отсутствует сила, толкающая от нижней поверхности вращающейся швабры 80 в направлении вверх, наклонная рама 47 повернута на максимальный угол, контактный участок 477 нижнего ограничителя входит в контакт с нижним ограничителем 427, и угол наклона становится наибольшим.
[126] Ограничитель может включать в себя верхний ограничитель (не показан), который ограничивает диапазон поворота наклонной рамы 47 вверх. В этом варианте осуществления диапазон поворота наклонной рамы 47 вверх может быть ограничен за счет воздухонепроницаемого контакта между ведущим шарниром и ведомым шарниром 415. В положении, в котором подвижный робот 1 должным образом расположен на наружной горизонтальной поверхности, ведомый шарнир 415 находится в плотном контакте с ведущим шарниром, и угол наклона становится наименьшим.
[127] Кожух 42 узла включает в себя вторую опору 425, которая закрепляет конец упругого элемента 49. При повороте наклонной рамы 47 упругий элемент 49 упруго деформируется или упруго восстанавливается с помощью первой опоры 475, закрепленной на наклонной раме 47, и второй опоры 425, закрепленной на кожухе 42 узла.
[128] Кожух 42 узла включает в себя опору 426 наклонного вала, которая поддерживает наклонный вал 48. Опора 426 наклонного вала поддерживает оба конца наклонного вала 48.
[129] Узел 40 швабры включает в себя узел 44 подачи воды узла, который направляет воду, подаваемую из емкости 32 для воды, на вращающуюся швабру 80 в соединенном положении. Узел 44 подачи воды узла направляет воду с верхней стороны на нижнюю сторону. Может быть установлена пара узлов подачи воды узла (не показаны), соответствующая паре вращающихся швабр 41a, 41b.
[130] Узел подачи воды узла (не показан) включает в себя соответствующий узел 441 подачи воды, который получает воду из емкости 32 для воды. Соответствующий узел 441 подачи воды расположен для соединения с соединительным узлом подачи воды (не показан).
[131] Узел 44 подачи воды узла включает в себя направляющий узел 445 подачи воды, который направляет воду, подаваемую в соответствующий узел 441 подачи воды, на вращающуюся швабру 80. Вода, подаваемая в соответствующий узел 441 подачи воды, проходит в направляющий узел 445 подачи воды через передающий узел 443 подачи воды.
[132] Направляющий узел 445 подачи воды расположен на наклонной раме 47. Направляющий узел 445 подачи воды закреплен на основании 471 рамы. Вода проходит в область, образованную направляющим узлом 445 подачи воды, через соответствующий узел 441 подачи воды и передающий узел 443 подачи воды. Разбрызгивание воды минимизировано с помощью направляющего узла 445 подачи воды, так что вся вода может проходить в приемный узел 413 подачи воды.
[133] Направляющий узел 445 подачи воды может включать в себя впускное отверстие 445a, которое образует область, углубленную от верхней стороны к нижней стороне. Впускное отверстие 445a может вмещать нижний конец передающего узла 443 подачи воды. Впускное отверстие 445a может образовывать область, в которой открыта верхняя сторона. Вода, которая прошла через передающий узел 443 подачи воды, подается через верхнее отверстие области впускного отверстия 445a. Одна сторона области впускного отверстия 445a соединена с каналом потока, который образует участок 445b канала потока.
[134] Направляющий узел 445 подачи воды может включать в себя участок 445b канала потока, который соединяет впускное отверстие 445a и выпускное отверстие 445c. Один конец участка 445b канала потока соединен с впускным отверстием 445a, и другой конец участка 445b канала потока соединен с выпускным отверстием 445c. Область, образованная участком 445b канала потока, служит в качестве канала для потока воды. Область участка 445b канала потока соединена с областью впускного отверстия 445a. Участок 445b канала потока может быть выполнен в форме канала, в котором верхняя сторона открыта. Участок 445b канала потока может иметь наклон, который постепенно уменьшается по высоте от впускного отверстия 445a к выпускному отверстию 445c.
[135] Направляющий узел 445 подачи воды может включать в себя выпускное отверстие 445c, которое выпускает воду в область Sw для подачи воды приемного узла 413 подачи воды. Нижний конец выпускного отверстия 445c может быть расположен в области Sw для подачи воды. Выпускное отверстие 445c образует канал, который соединен от внутренней области кожуха 42 узла к области над вращающейся пластиной 412. Канал выпускного отверстия 445c соединяет две области вертикально. Выпускное отверстие 445c образует канал, которое проходит через наклонную раму 47 вертикально. Область участка 445b канала потока соединена с каналом выпускного отверстия 445c. Нижний конец выпускного отверстия 445c может быть расположен в области Sw для подачи воды приемного узла 413 подачи воды.
[136] Наклонная рама 47 соединена с кожухом 42 узла через наклонный вал 48. Наклонная рама 47 поддерживает с возможностью вращения вращающийся вал 414.
[137] Наклонная рама 47 выполнена с возможностью вращения в заданном диапазоне вокруг наклонной оси Ota и Otb вращения. Наклонная ось Ota, Otb вращения проходит в направлении, поперечном к оси Osa, Osb вращения вращающегося вала 414. Наклонный вал 48 расположен на наклонной оси Ota, Otb вращения. Левая наклонная рама 47 выполнена с возможностью вращения в заданном диапазоне вокруг наклонной оси Ota вращения. Правая наклонная рама 47 выполнена с возможностью вращения в заданном диапазоне вокруг наклонной оси Otb вращения.
[138] Наклонная рама 47 расположена с возможностью наклона в пределах заданного углового диапазона относительно узла 40 швабры. Наклонная рама 47 обеспечивает изменение угла наклона в соответствии с состоянием пола. Наклонная рама 47 может выполнять функцию подвески вращающейся швабры 80 (для поддержания веса и уменьшения вибрации вверх и вниз).
[139] Наклонная рама 47 включает в себя основание 471 рамы, которое образует нижнюю поверхность. Вращающийся вал 414 расположен посредством вертикального прохождения через основание 471 рамы. Основание 471 рамы может быть выполнено в форме пластины, которая образует вертикальную толщину. Наклонный вал 48 соединяет с возможностью вращения кожух 42 узла и основание 471 рамы.
[140] Подшипник Ba может быть расположен между опорой 473 вращающегося вала и вращающимся валом 414. Подшипник Ba может включать в себя первый подшипник B1, расположенный на нижней стороне, и второй подшипник B2, расположенный на верхней стороне.
[141] Нижний конец опоры 473 вращающегося вала вставлен в область Sw для подачи воды приемного узла 413 подачи воды. Внутренняя периферийная поверхность опоры 473 вращающегося вала поддерживает вращающийся вал 414.
[142] Наклонная рама 47 включает в себя первую опору 475, которая поддерживает один конец упругого элемента 49. Другой конец упругого элемента 49 поддерживается второй опорой 425, расположенной в кожухе 42 узла. Когда наклонная рама 47 наклоняется на наклонном валу 48, изменяется местоположение первой опоры 475 и изменяется длина упругого элемента 49.
[143] Первая опора 475 закреплена на наклонной раме 47. Первая опора 475 расположена на левой стороне левой наклонной рамы 47. Первая опора 475 расположена на правой стороне правой наклонной рамы 47. Вторая опора 425 расположена в левой области первой вращающейся пластины 41a. Вторая опора 425 расположена в правой области второй вращающейся пластины 41b.
[144] Первая опора 475 закреплена на наклонной раме 47. Первая опора 475 наклоняется вместе с наклонной рамой 47 при наклоне наклонной рамы 47. Расстояние между первой опорой 475 и второй опорой 425 является наименьшим, когда угол наклона минимизирован, и расстояние между первой опорой 475 и второй опорой 425 является наибольшим, когда угол наклона максимизирован. В положении, когда угол наклона минимизирован, упругий элемент 49 упруго деформируется, таким образом, обеспечивая восстанавливающую силу.
[145] Наклонная рама 47 включает в себя контакт 477 нижнего ограничителя, который выполнен с возможностью контакта с нижним ограничителем 427. Нижняя поверхность контактного участка 477 нижнего ограничителя может быть выполнена с возможностью обеспечения контакта с верхней поверхностью нижнего ограничителя 427.
[146] Наклонный вал 48 расположен в кожухе 42 узла. Наклонный вал 48 служит в качестве оси вращения наклонной рамы 47. Наклонный вал 48 может быть расположен для прохождения в направлении, перпендикулярном к направлению наклона вращающейся швабры 80. Наклонный вал 48 может быть расположен для прохождения в горизонтальном направлении. В этом варианте осуществления наклонный вал 48 расположен для прохождения в направлении, наклоненном под острым углом от направления вперед-назад.
[147] Упругий элемент 49 прикладывает упругую силу к наклонной раме 47. К наклонной раме 47 прикладывается упругая сила, так что угол наклона нижней поверхности вращающейся швабры 80 относительно горизонтальной поверхности увеличивается.
[148] Упругий элемент 49 выполнен с возможностью удлинения, когда наклонная рама 47 поворачивается вниз, и сжатия, когда наклонная рама поворачивается вверх. Упругий элемент 49 обеспечивает работу наклонной рамы 47 с возможностью поглощения удара (упругим способом). Упругий элемент 49 прикладывает моментальную силу к наклонной раме 47 в направлении, в котором угол наклона увеличивается.
[149] Вращающаяся швабра 80 включает в себя вращающуюся пластину 81, 82, 412, расположенную с возможностью вращения под корпусом 10. Вращающаяся пластина 412 может быть выполнена в виде круглого пластинчатого элемента вокруг вращающегося вала 414. Протирочная тряпка 411 закреплена на нижней поверхности вращающейся пластины 412. Вращающаяся пластина 412 вращает протирочную тряпку 411. Вращающийся вал 414 закреплен в центре вращающейся пластины 412.
[150] Вращающаяся пластина 412 включает в себя вторую вращающуюся пластину 412, расположенную на расстоянии от первой вращающейся пластины 81, 412. Нижняя поверхность первой вращающейся пластины 412 может образовывать наклон вниз в направлении влево вперед, и нижняя поверхность второй вращающейся пластины 82, 412 может образовывать наклон вниз в направлении вправо вперед.
[151] Вращающаяся пластина 412 включает в себя часть 412c для закрепления протирочной тряпки, которая закрепляет протирочную тряпку 90, 411. Часть 412c для закрепления протирочной тряпки может закреплять протирочную тряпку 411 с возможностью съема. Часть 412c для закрепления протирочной тряпки может быть липучкой или тому подобным, которая расположена на нижней поверхности вращающейся пластины 412. Часть 412c для закрепления протирочной тряпки может быть крючком или тому подобным, который расположен на кромке вращающейся пластины 412.
[152] Образовано отверстие 412a для подачи воды, проходящее через вращающуюся пластину 412 в направлениях вверх и вниз. Отверстие 412a для подачи воды соединяет область Sw для подачи воды и нижнюю сторону вращающейся пластины 412. Через отверстие 412a для подачи воды вода из области Sw для подачи воды проходит на нижнюю сторону вращающейся пластины 412. Через отверстие 412a для подачи воды вода из области Sw для подачи воды проходит на протирочную тряпку 411. Отверстие 412a для подачи воды расположено в центре вращающейся пластины 412. Отверстие 412a для подачи воды расположено в местоположении, где исключен вращающийся вал 414. Конкретно, отверстие 412a для подачи воды расположено в местоположении, не перекрывающем вращающийся вал 414 в вертикальном направлении.
[153] Вращающаяся пластина 412 может образовывать множество отверстий 412 для подачи воды. Соединительная часть 412b расположена между множеством отверстий 412a для подачи воды. Соединительная часть 412b соединяет участок, соответствующий центробежному направлению XO вращающейся пластины 412 относительно отверстия 412a для подачи воды и участок, соответствующий противоположному центробежному направлению XI, вращающейся пластины 412 относительно отверстий 412a для подачи воды. Здесь центробежное направление XO относится к направлению, удаленному от вращающегося вала 414, и противоположное центробежное направление XI относится к направлению, более близкому к вращающемуся валу 414.
[154] Множество отверстий 412a для подачи воды может быть расположено на расстоянии друг от друга по направлению вдоль окружности вращающегося вала 414. Множество отверстий 412a для подачи воды может быть расположено на заданном расстоянии друг от друга. Множество соединительных частей 412b может быть расположено на расстоянии друг от друга по направлению вдоль окружности вращающегося вала 414. Каждое из отверстий 412a для подачи воды расположено между множеством соединительных частей 412b.
[155] Вращающаяся пластина 412 включает в себя наклонный участок 412d, расположенный на нижнем конце вращающегося вала 414. Вода из области Sw для подачи воды проходит вниз по наклонному участку 412d под действием силы тяжести. Наклонный участок 412d образован по окружности нижнего конца вращающегося вала 414. Наклонный участок 412d образует наклон вниз в противоположном центробежном направлении XI. Наклонный участок 412d может образовывать нижнюю поверхность отверстий 412a для подачи воды.
[156] Вращающаяся швабра 80 включает в себя протирочную тряпку 411, которая соединена с нижней стороной вращающейся пластины 412, чтобы, таким образом, контактировать с полом. Протирочная тряпка 411 может быть расположена с возможностью замены на вращающейся пластине 412. Протирочная тряпка 411 может быть закреплена с возможностью съема на вращающейся пластине 412 с помощью липучки или крючка. Протирочная тряпка 411 может состоять только из протирочной тряпки 411 или может состоять из протирочной тряпки 411 и распорного элемента (не показан). Протирочная тряпка 411 является участком, который непосредственно контактирует с полом для очистки.
[157] Вращающаяся швабра 80 включает в себя вращающийся вал 414, который вращает вращающуюся пластину 412. Вращающийся вал 414 закреплен на вращающейся пластине 412 и передает вращательное усилие приводного узла 60 швабры вращающейся пластине 412. Вращающийся вал 414 соединен с верхней стороной вращающейся пластины 412. Вращающийся вал 414 расположен в центре верхней стороны вращающейся пластины 412. Вращающийся вал 414 закреплен в центре Osa, Osb вращения (ось вращения) вращающейся пластины 412. Вращающийся вал 414 включает в себя участок 414a для закрепления шарнира, который закрепляет ведомой шарнир 415. Участок 414a для закрепления шарнира расположен на верхнем конце вращающегося вала 414.
[158] Узел 40 швабры включает в себя узел 413 приема подачи воды, который расположен на верхней стороне вращающейся пластины 412 для приема воды. Узел 413 приема подачи воды образует область Sw для подачи воды, в которой содержится вода. Узел 413 приема подачи воды образует область SW для подачи воды, которая расположена на расстоянии от вращающегося вала 414 при окружении окружности вращающегося вала 414. Узел 413 приема подачи воды обеспечивает сбор воды, подаваемой на верхнюю сторону вращающейся пластины 412, в области Sw для подачи воды до тех пор, пока вода не пройдет через отверстия 412a для подачи воды. Область Sw для подачи воды расположена в центре верхней стороны вращающейся пластины 412. Область Sw для подачи воды в целом имеет цилиндрический объем. Верхняя сторона области Sw для подачи воды открыта. Вода проходит в область Sw для подачи воды через верхнюю сторону области Sw для подачи воды.
[159] Узел 413 приема подачи воды выступает вверх от вращающейся пластины 412. Узел 413 приема подачи воды проходит по направлению вдоль окружности вращающегося вала 414. Часть 413 для приема воды может быть выполнена в форме ребра кольцевого типа. Отверстия 412a для подачи воды образованы во внутренней нижней поверхности узла 413 приема подачи воды. Узел 413 приема подачи воды расположен на расстоянии от вращающегося вала 414.
[160] Нижний конец узла 413 приема подачи воды закреплен на вращающейся пластине 412. Верхний конец узла 413 приема воды имеет свободный конец 463.
[161] Фиг.4 является блок-схемой, кратко показывающей конфигурацию подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[162] Как показано на фиг.4, подвижный робот 1 включает в себя устройство 180 для очистки, блок 120 данных, детектор 100 препятствий, устройство 170 получения изображения, узел 150 датчиков и устройство 130 связи, оператор 160, блок 190 вывода и контроллер 110 для управления общей работой.
[163] Оператор 160 включает в себя средство ввода, такое как, по меньшей мере, одна кнопка, переключатель или сенсорная панель для приема команды пользователя. Оператор может быть расположен в верхней части основного корпуса 10, как описано выше.
[164] Блок 190 вывода имеет дисплей, такой как светодиод и ЖК-дисплей, и отображает режим работы, информацию о резервировании, состояние батареи, рабочее состояние, состояние ошибки и тому подобное подвижного робота 1. Кроме того, блок 190 вывода содержит динамик или устройство звуковой сигнализации и выдает заранее заданный звуковой спецэффект, предупреждающий звук или голосовое руководство, соответствующее режиму работы, информации о резервировании, состоянии батареи, рабочего состояния, состояния ошибки и тому подобного.
[165] В некоторых случаях подвижный робот может дополнительно включать в себя входное аудиоустройство (не показано).
[166] Входное аудиоустройство включает в себя, по меньшей мере, один микрофон и принимает звук, генерируемый в окружающей области или области в пределах конкретного расстояния от основного корпуса 10. Входное аудиоустройство может дополнительно включать в себя процессор сигналов (не показан), который фильтрует, усиливает и преобразует входной звук. Подвижный робот 1 может работать посредством распознавания голосовой команды, вводимой через входное аудиоустройство.
[167] Блок 120 данных хранит полученное изображение, вводимое с устройства 170 получения изображения, справочные данные, используемые для средства 111 распознавания препятствия, для определения препятствия, и информацию об обнаруженном препятствии.
[168] Блок 120 данных хранит данные о препятствии для определения типа препятствия, данные изображения, в которых хранится захваченное изображение, и данные карты, касающиеся области. Данные карты включают в себя информацию о препятствиях, и сохраняются различные типы карт для областей, по которым можно перемещаться, которые должны просматриваться с помощью подвижного робота.
[169] Блок 120 данных может включать в себя изображение, полученное с помощью устройства получения изображений, например, неподвижное изображение, видео и панорамное изображение. Кроме того, блок 120 данных хранит управляющие данные для управления работой подвижного робота, данные в соответствии с режимом очистки подвижного робота и измерительный сигнал, такой как ультразвук/лазер, принятый узлом 150 датчиков.
[170] Кроме того, блок 120 данных может хранить данные, считываемые микропроцессором, и может включать в себя жесткий диск (HDD), твердотельный диск (SSD), кремниевый дисковод (SDD), память только для чтения (ROM), память с произвольным доступом (RAM), память только для чтения компакт-диска (CD-ROM), магнитную ленту, гибкий диск, оптическое устройство хранения данных и т.д.
[171] Устройство 130 связи осуществляет связь с терминалом 300 способом беспроводной связи. Кроме того, устройство 130 связи может быть соединено с сетью Интернет через домашнюю сеть и взаимодействовать с внешним сервером (не показан) или терминалом 300 для управления подвижным роботом.
[172] Устройство 130 связи передает сгенерированную карту на терминал 300, принимает команду очистки с терминала и передает данные о рабочем состоянии и состоянии очистки подвижного робота на терминал. Кроме того, устройство 130 связи может передавать информацию о препятствии, обнаруженном во время перемещения, на терминал 300 или сервер. Устройство 130 связи передает и принимает данные, включая модули связи, такие как беспроводная связь малой дальности, такая как ZigBee, Bluetooth, Wi-Fi и WiBro.
[173] Устройство 130 связи может осуществлять связь с зарядным стендом 2 и принимать сигнал зарядки для возврата к зарядному стенду или направляющий сигнал для соединения с зарядным стендом. Подвижный робот 1 ищет зарядную стойку на основании сигнала, полученного через устройство 130 связи, и соединяется с зарядной стойкой.
[174] С другой стороны, терминал 300 представляет собой устройство, в котором установлен модуль связи для доступа к сети и установлена программа или приложение для управления подвижным роботом, и в качестве терминала могут использоваться компьютер, ноутбук, смартфон, КПК, планшетный ПК и тому подобное. Кроме того, в качестве терминала может использоваться носимое устройство, такое как умные часы.
[175] Терминал 300 может выдавать заранее заданный предупреждающий звуковой сигнал или отображать принятое изображение в соответствии с данными, полученными с подвижного робота 1.
[176] Терминал 300 может принимать данные о подвижном роботе 1, отслеживать рабочее состояние подвижного робота и управлять подвижным роботом 1 с помощью команды управления.
[177] Терминал 300 может быть непосредственно соединен с подвижным роботом 1 на взаимно-однозначном соответствии, и также может быть соединен через сервер, например, сервер управления бытовой техникой.
[178] Устройство 180 для очистки вращает первую вращающуюся пластину 81 и вторую вращающуюся пластину 82 вращающейся швабры 80 с помощью приводного узла (не показан) для удаления инородных веществ с поверхности пола в соответствии с вращением закрепленной протирочной тряпки 90.
[179] Основной корпус 10 перемещается за счет вращения первой и второй вращающихся пластин 81 и 82 устройства 180 для очистки. Соответственно, устройство 180 для очистки может работать как маршрутная карта.
[180] Кроме того, устройство 180 для очистки может дополнительно включать в себя узел подачи воды (не показан) и емкость 32 для воды, причем узел подачи воды соединен с вращающейся шваброй 80 для подачи воды на протирочную тряпку, закрепленную на первой и второй вращающихся пластинах. Подача воды может включать в себя насос или клапан.
[181] Устройство 180 для очистки может включать в себя отдельное приспособление для протирочной тряпки для закрепления протирочной тряпки на вращающейся швабре. Батарея (не показана) подает питание, необходимое не только для электродвигателя, но также для общей работы подвижного робота 1. Когда батарея разряжена, подвижный робот 1 может перемещаться для возврата к зарядному стенду для зарядки, и во время такого обратного перемещения подвижный робот 1 может самостоятельно определять местоположение зарядного стенда.
[182] Зарядный стенд 2 может включать в себя передатчик сигнала (не показан) для передачи заданного отраженного сигнала. Отраженным сигналом может быть ультразвуковой сигнал или инфракрасный сигнал, но не ограничивается этим.
[183] Детектор 100 препятствий излучает рисунок заданной формы и получает излучаемый рисунок в виде изображения. Детектор препятствий может включать в себя, по меньшей мере, один излучатель рисунка (не показан) и устройство получения рисунка.
[184] Кроме того, детектор препятствий может включать в себя датчик, такой как ультразвуковой датчик, лазерный датчик, инфракрасный датчик и 3D-датчик, для определения местоположения препятствия. Кроме того, детектор 100 препятствий может обнаруживать препятствие на основании изображения направления перемещения. Узел датчиков и устройство получения изображения могут быть включены в детектор препятствий.
[185] Узел 150 датчиков включает в себя множество датчиков для обнаружения препятствия. Узел 150 датчиков обнаруживает препятствие, расположенное в направлении вперед, то есть, в направлении перемещения, используя, по меньшей мере, один из ультразвукового датчика, лазерного датчика и инфракрасного датчика. Узел 150 датчиков может использоваться в качестве вспомогательного средства для обнаружения препятствия, которое не может быть обнаружено детектором препятствий.
[186] Кроме того, узел 150 датчиков может дополнительно включать в себя датчик уступа, который обнаруживает наличие уступа на полу в области перемещения. Когда переданный сигнал отражается и падает, узел 150 датчиков вводит информацию о том, что существует ли препятствие или расстояние до препятствия в качестве сигнала обнаружения препятствия в контроллер 110.
[187] Узел 150 датчиков включает в себя, по меньшей мере, один датчик угла наклона для определения наклона основного корпуса. При наклоне основного корпуса в направлении вперед, назад, влево или влево датчик наклона рассчитывает направление наклона и угол наклона. Датчик угла наклона может быть датчиком наклона, датчиком ускорения и тому подобным, и датчик ускорения может быть любым из типа гироскопа, инерционного типа и типа кремниевого полупроводника.
[188] Узел 150 датчиков может определять угол вращения и расстояние перемещения основного корпуса 10. Угол может быть измерен с помощью датчика гироскопа, и расстояние перемещения может быть измерено с помощью лазерного оптоволоконного датчика.
[189] Кроме того, узел 150 датчиков может определять рабочее состояние или состояние ошибки с помощью датчика, установленного внутри подвижного робота 1.
[190] Устройство 170 получения изображения состоит, по меньшей мере, из одной камеры.
[191] Устройство 170 получения изображения может включать в себя камеру, которая преобразует изображение объекта в электрический сигнал, преобразует электрический сигнал обратно в цифровой сигнал и сохраняет цифровой сигнал в запоминающем устройстве. Камера может включать в себя, по меньшей мере, одну оптическую линзу, датчик изображения (например, датчик изображения на КМОП-структуре), включающий в себя множество фотодиодов (например, пикселей), на которых изображение создается светом, проходящим через оптическую линзу, и процессор цифровых сигналов (DSP) для построения изображения на основании сигналов, выводимых с фотодиодов. DSP может создавать не только неподвижное изображение, но также видео, состоящее из кадров, составляющих неподвижные изображения.
[192] Датчик изображения является устройством, которое преобразует оптическое изображение в электрический сигнал и выполнено в виде микросхемы, имеющей множество встроенных в нее фотодиодов. Например, фотодиодами могут быть пиксели. Когда свет, пройдя через линзу, формирует изображение на микросхеме, заряды накапливаются в соответствующих пикселях, образующих изображение, и заряды, накопленные в пикселях, преобразуются в электрический сигнал (например, напряжение). Как хорошо известно, в качестве датчика изображения могут использоваться устройство с зарядовой связью (CCD), комплементарный металло-оксидный полупроводник (КМОП) и тому подобное.
[193] Когда подвижный робот работает, устройство 170 получения изображения непрерывно захватывает изображения. Кроме того, устройство 170 получения изображения может захватывать изображение с заданным циклом или с заданной единицей длины. Устройство 170 получения изображения может устанавливать цикл съемки в соответствии со скоростью перемещения подвижного робота.
[194] Устройство 170 получения изображения может получать не только изображение области вперед в направлении перемещения, но также изображение формы потолка вверх. Устройство 170 получения изображения сохраняет изображение, которое захвачено во время перемещения основного корпуса, в блоке 120 данных в качестве данных изображения.
[195] Детектор 100 препятствий вводит информацию об обнаруженном местоположении обнаруженного препятствия или перемещении препятствия в контроллер 110. Узел 150 датчиков может вводить сигнал обнаружения относительно препятствия, обнаруженного установленным датчиком, в контроллер. Устройство 170 получения изображения вводит захваченное изображение в контроллер.
[196] Контроллер 110 управляет подвижным роботом для перемещения в пределах соответствующей области во всей области перемещения.
[197] Контроллер 110 устанавливает режим работы подвижного робота посредством обработки данных, вводимых работой оператора 160, выводит рабочее состояние через блок 190 вывода и выводит предупреждающий звук, звуковой спецэффект и голосовое руководство через динамик блока вывода в соответствии с рабочим состоянием, состоянием ошибки или обнаружением препятствия.
[198] Контроллер 110 формирует карту области перемещения на основании изображения, полученного устройством 170 получения изображения, и информации о препятствии, обнаруженной узлом 150 датчиков или детектора 100 препятствий. Контроллер 110 может формировать карту области перемещения на основании информации о препятствии при перемещении в области, и в этом случае контроллер может формировать карту посредством определения формы области перемещения на основании изображения, полученного с устройства получения изображения.
[199] Контроллер 110 распознает препятствие, обнаруженное устройством 170 получения изображения или детектором 100 препятствий, и выполняет управление для перемещения посредством выполнения заранее заданной работы или изменения маршрута в соответствии с распознаванием препятствия. Кроме того, контроллер может выводить заранее заданный звуковой спецэффект или предупреждающий звук через блок вывода по мере необходимости и может управлять устройством получения изображения для захвата изображения.
[200] Кроме того, контроллер 110 управляет устройством 180 для очистки для перемещения при очистке поверхности пола в соответствии с командой очистки. Когда основной корпус 10 перемещается в соответствии с вращением устройства 180 для очистки, контроллер 110 определяет рабочее состояние на основании того, что перемещается ли основной корпус по заданной траектории перемещения и должным образом ли перемещается основной корпус.
[201] Контроллер 110 устанавливает траекторию перемещения к конкретному пункту назначения и выполняет управление для обхода препятствия при перемещении по траектории перемещения.
[202] При перемещении прямо вперед, если основной корпус отклоняется от траектории без перемещения прямо вперед, контроллер 110 может определить то, что в состоянии перемещения имеется отклонение.
[203] Когда имеется отклонение в состоянии перемещения, контроллер 110 определяет то, что является ли причиной аномального перемещения вследствие неисправности в приводном узле устройства для очистки из-за отсутствия протирочной тряпки или тому подобного.
[204] Контроллер 110 сравнивает заданную траекторию перемещения с траекторией перемещения, по которой фактически перемещается основной корпус 10, для определения состояния перемещения. Контроллер 110 определяет состояние перемещения посредством определения того, что перемещается или нет основной корпус 10 в соответствии с траекторией перемещения, установленной на основании изменения местоположения во время перемещения.
[205] При перемещении при отклонении на заданное расстояние от установленной траектории перемещения контроллер 110 может определить то, что в состоянии перемещения имеется отклонение.
[206] При обнаружении препятствия контроллер 110 определяет нормальное перемещение, и при перемещении в отсутствии препятствия при отклонении на заданное расстояние от траектории перемещения контроллер 110 может определять аномальное перемещение.
[207] Контроллер 110 может анализировать причину аномального перемещения на основании тока электродвигателя.
[208] Когда электродвигатель работает нормально, и основной корпус 10 отклоняется на заданное расстояние от траектории перемещения при отсутствии препятствия, контроллер 110 может определять аномальное перемещение из-за состояния пола.
[209] Контроллер 110 может определять материал поверхности пола на основании значения тока электродвигателя. Когда происходит непрерывное аномальное перемещение, контроллер 110 может определить то, что аномальное перемещение происходит из-за материала пола, и, таким образом, может изменять перемещение в соответствии с материалом поверхности пола.
[210] Когда в конкретном местоположении происходит аномальное перемещение, контроллер 110 может определить то, что аномальное перемещение вызвано инородными веществами. Например, контроллер 110 может определить то, что проскальзывание происходит из-за инородных веществ на поверхности пола.
[211] Когда происходит проскальзывание, контроллер 110 определяет текущее местоположение. Контроллер 110 сохраняет местоположение, в котором происходит аномальное перемещение, то есть, проскальзывание, и устанавливает соответствующее местоположение для повторной очистки. Когда происходит проскальзывание, соответствующее местоположение обычно не очищается, и имеется значительное количество инородных веществ, вызывающих проскальзывание, и, следовательно, контроллер может определить то, что очистка выполнена не полностью, и, таким образом, может установить местоположение для повторной очистки.
[212] Когда аномальное перемещение происходит во множестве местоположений, контроллер может установить область отклонения посредством соединения местоположений в пределах заданного расстояния и установить область отклонения для повторной очистки.
[213] Контроллер 110 может установить повторную очистку местоположения, где произошло отклонение, после завершения очистки других областей. Кроме того, контроллер 110 может быть установлен для немедленной повторной очистки местоположения, где возникает отклонение, и затем очистки других областей.
[214] В некоторых случаях контроллер 110 может селективно выполнять повторную очистку в соответствии с командой пользователя, вводимой с терминала, при передаче уведомления в соответствии с отклонением на терминал.
[215] При повторной очистке контроллер 110 может устанавливать выполнение повторной очистки при перемещении по траектории перемещения, отличной от текущей траектории перемещения.
[216] Кроме того, когда происходит аномальное перемещение, блок 110 управления может немедленно генерировать уведомление и запрашивать замену протирочной тряпки. Когда протирочная тряпка заменена, контроллер 110 может снова выполнить очистку.
[217] При этом, когда происходит аномальное перемещение, особенно когда определено то, что происходит проскальзывание, блок 110 управления может выполнять компенсирующее перемещение при подготовке к проскальзыванию из-за материала пола или из-за инородных веществ.
[218] Например, когда проскальзывание в правую сторону происходит при перемещении прямо вперед, контроллер 110 может управлять перемещением в левую сторону на заданный угол для компенсации проскальзывания в правую сторону. Кроме того, когда фактическое расстояние перемещения больше, чем расстояние перемещения, которое необходимо преодолеть, контроллер 110 может выполнять компенсирующее перемещение для проскальзывания посредством регулировки скорости вращения для регулировки силы для перемещения вперед.
[219] Когда в состоянии перемещения имеется отклонение, контроллер 110 может генерировать предупреждающее сообщение, предупреждающий звуковой сигнал и тому подобное для уведомления об отклонении и может выводить то же самое через блок 190 вывода. Контроллер 110 может отображать предупреждение в сочетании, по меньшей мере, одного из сообщения, значка и изображения на панели управления, расположенной на верхнем участке основного корпуса 10, и может включать сигнальную лампу, и может выводиться голосовое руководство.
[220] При обычном перемещении контроллер 110 управляет для очистки поверхности пола при перемещении в заданной области в соответствии с предварительно введенной командой очистки.
[221] Когда в состоянии перемещения существует отклонение, контроллер 110 может установить выполнение повторной очистки в соответствии с причиной отклонения. При выполнении повторной очистки контроллер 110 может выдавать уведомление о повторной очистке через блок вывода.
[222] Кроме того, когда возникает отклонение в состоянии перемещения контроллер 110 может остановить работу. Контроллер 110 останавливает работу, когда определено, что протирочная тряпка не установлена, или электродвигатель или приводной узел находятся в неисправном состоянии.
[223] Кроме того, контроллер 110 генерирует предупреждение в соответствии с возникновением отклонения и передает сгенерированное предупреждение через устройство 130 связи на терминал 300.
[224] Если определено, что в состоянии перемещения имеется отклонение, контроллер 110 может сохранить местоположение, в котором возникает отклонение, и может отобразить соответствующее местоположение на карте. Контроллер 110 может передавать данные о местоположении, где происходит аномальное перемещение, на терминал 300, так что местоположение отображается на карте на экране через терминал.
[225] Терминал 300 отображает местоположение, в котором происходит аномальное перемещение, на карте в соответствии с данными, полученными с контроллера 110. Кроме того, терминал 300 может отображать сообщение для замены протирочной тряпки на основании полученных данных.
[226] В случае остановки работы, когда команда очистки снова введена оператором или терминалом 300, контроллер 110 может повторно перемещать и повторно определять состояние перемещения.
[227] Контроллер 110 может анализировать звуковой ввод через входное аудиоустройство для распознавания голоса. В некоторых случаях контроллер 110 может передавать входной звук на сервер распознавания голоса (не показан) для распознавания входного голоса. Когда распознавание голоса завершено, контроллер 110 выполняет работу, соответствующую голосовой команде.
[228] Кроме того, контроллер 110 выводит голосовое руководство, соответствующее голосовой команде, через динамик блока 190 вывода.
[229] Контроллер 110 проверяет зарядную емкость батареи и определяет время для возврата к зарядному стенду. Когда зарядная емкость достигает заданного значения, контроллер 110 останавливает выполняемую работу и начинает поиск зарядного стенда для возврата к зарядному стенду. Контроллер 110 может выдавать уведомление о зарядной емкости батареи и уведомление о возвращении к зарядному стенду. Кроме того, когда сигнал, переданный с зарядного стенда, принят через устройство 130 связи, контроллер 110 может вернуться к зарядному стенду.
[230] Контроллер 110 включает в себя устройство 111 распознавания препятствий, картогенератор 112, контроллер 113 перемещения и устройство 114 распознавания местоположения.
[231] В случае начальной работы или в случае, когда карта области не сохранена, картогенератор 112 формирует карту области на основании информации о препятствиях при перемещении в области. Кроме того, картогенератор 112 обновляет ранее сформированную карту на основании информации о препятствиях, полученной во время перемещения. Кроме того, картогенератор 112 формирует карту посредством анализа изображения, полученного во время перемещения, и определения формы области на основании результата анализа.
[232] После формирования основной карты картогенератор 112 разделяет область очистки на множество областей и формирует карту, которая включает в себя каналы, соединяющие множество областей, и информацию о любом препятствии в каждой из множества областей.
[233] Картогенератор 112 обрабатывает форму каждой разделенной области. Картогенератор 112 может устанавливать атрибуты для каждой разделенной области.
[234] Кроме того, картогенератор 112 может различать область на основании элементов, извлеченных из изображения. Картогенератор 112 может определять местоположение двери на основании взаимосвязи элементов и может различать границы между областями для формирования карты, состоящей из множества областей.
[235] Устройство 111 распознавания препятствий может определять препятствие на основании данных, введенных с устройства 170 получения изображения или детектора 100 препятствий, картогенератор 112 может формировать карту области перемещения, и информация об обнаруженном препятствии может быть включена в карту.
[236] Устройство 111 распознавания препятствий анализирует данные, введенные с детектора 100 препятствий, для определения препятствия. Направление препятствия или расстояние до препятствия рассчитывается в соответствии с сигналом обнаружения с детектора препятствий, например, ультразвуковым сигналом, лазерным сигналом или тому подобным. Кроме того, устройство распознавания препятствий может извлекать рисунок посредством анализа полученного изображения, включающего в себя рисунок, и определять препятствие посредством анализа формы рисунка. Когда используется ультразвуковой или инфракрасный сигнал, может быть разница в форме принятых ультразвуковых волн или разница во времени приема ультразвуковых волн в соответствии с расстоянием до препятствия или местоположением препятствия, и, следовательно, устройство 111 распознавания препятствий определяет препятствие на основании вышеизложенного.
[237] Устройство 111 распознавания препятствий может определять препятствие, расположенное вокруг основного корпуса, посредством анализа изображения, захваченного с помощью устройства 170 получения изображений.
[238] Устройство 111 распознавания препятствий может обнаруживать человеческое тело. Устройство 111 распознавания препятствий анализирует данные, введенные через детектор 100 препятствий или устройство 170 получения изображения, обнаруживает человеческое тело на основании силуэта, размера, формы лица и тому подобного, и определяет, является ли соответствующее человеческое тело зарегистрированным пользователем.
[239] Устройство 111 распознавания препятствий извлекает элементы объекта посредством анализа данных изображения, определяет препятствие на основании вида (формы), размера и цвета препятствия и определяет местоположение препятствия.
[240] Устройство 111 распознавания препятствий может определять препятствие посредством извлечения элементов препятствия на основании ранее сохраненных данных о препятствии, за исключением фона изображения, из данных изображения. Данные о препятствиях обновляются новыми данными о препятствиях, полученными с сервера. Подвижный робот 1 может сохранять данные об обнаруженном препятствии и получать данные о типе препятствия с сервера для других данных.
[241] Кроме того, устройство 111 распознавания препятствий может сохранять информацию об распознанном препятствии в данных о препятствиях и может передавать данные о распознанном изображении на сервер (не показан) через устройство 130 связи для определения типа препятствия. Устройство 130 связи передает, по меньшей мере, данные одного изображения на сервер.
[242] Устройство 111 распознавания препятствий определяет препятствие на основании данных изображения, преобразованных процессором изображений.
[243] Устройство 114 распознавания местоположения рассчитывает текущее местоположение основного корпуса.
[244] Устройство 114 распознавания местоположения может определять текущее местоположение на основании сигнала, принятого с использованием имеющегося устройства распознавания местоположения, например, GPS, UWB или тому подобного.
[245] Устройство 114 распознавания местоположения может извлекать элементы из изображения, полученного с устройства получения изображений, то есть, данные изображения, и сравнивать элементы для определения текущего местоположения. Устройство 114 распознавания местоположения может определять текущее местоположение на основании конструкции, окружающей основной корпус, формы потолка и тому подобного, которые находятся на изображении.
[246] Устройство 114 распознавания местоположения обнаруживает элементы, такие как точки, линии и плоскости, для заранее определенных пикселей, составляющих изображение, и анализирует характеристики области на основании обнаруженных элементов для определения текущего местоположения. Устройство 114 распознавания местоположения может извлекать контур потолка и извлекать элементы, такие как осветительное устройство.
[247] Устройство распознавания местоположения непрерывно определяет текущее местоположение в области на основании данных изображения, сопоставляет элементы, выполняет обучение посредством сопоставления элементов и отражения изменения в окружающей конструкции и рассчитывает значение местоположения.
[248] Контроллер 113 перемещения выполняет управление для перемещения в области на основании карты и для изменения направления перемещения или траектории перемещения на основании информации об обнаруженном препятствии для прохождения через препятствие или его обхода.
[249] Контроллер 113 перемещения управляет устройством 180 для очистки в соответствии с командой очистки, так что очистка может выполняться по мере того, как основной корпус 10 удаляет инородные вещества с поверхности пола при перемещении в области очистки.
[250] Контроллер 113 перемещения управляет приводным узлом (не показан) устройства 180 для очистки для управления работой первой вращающейся пластины 81 и второй вращающейся пластины 82 независимо, так что основной корпус 10 перемещается прямо вперед или поворачивается для перемещения.
[251] Контроллер 113 перемещения управляет основным корпусом для перемещения в заданную область на основании карты, сформированной картогенератором 112, или перемещения в пределах заданной области. Кроме того, контроллер 113 перемещения управляет перемещением на основании текущего местоположения, рассчитанного устройством 114 распознавания местоположения.
[252] Контроллер 113 перемещения выполняет управление для выполнения заданной работы в соответствии с препятствием или изменения траектории перемещения в соответствии с сигналом обнаружения с детектора 100 препятствий.
[253] Контроллер 113 перемещения выполняет управление для выполнения, по меньшей мере, одного из следующих действий в соответствии с обнаруженным препятствием: обхода препятствия, приближения к препятствию, установки расстояния приближения, остановки, замедления, ускорения, обратного перемещения, выполнения вращения на 180° и изменения направления перемещения.
[254] Контроллер 113 перемещения определяет состояние перемещения на основании информации об изменении местоположения, которая получена с устройства распознавания местоположения, и когда происходит аномальное перемещение, контроллер перемещения генерирует ошибку в соответствии с аномальным перемещением.
[255] Когда в состоянии перемещения происходит отклонение, контроллер 113 перемещения может определить причину отклонения и может поддерживать работу или останавливать работу в соответствии с отклонением и также может выполнять компенсирующее перемещение. Например, когда в состоянии перемещения происходит отклонение из-за того, что протирочная тряпка не закреплена, работа может быть остановлена, и может быть выдано уведомление об отсутствии протирочной тряпки. Кроме того, когда изменение местоположения заданного размера или более происходит из-за материала пола или инородных веществ на полу, например, когда происходит проскальзывание, сохраняется соответствующая информация о местоположении и выполняется компенсирующее перемещение в результате проскальзывания.
[256] Когда происходит аномальное перемещение, контроллер 113 перемещения может определить то, что возможно ли перемещение, когда возможно перемещение, контроллер перемещения может вернуться к траектории перемещения для перемещения, и когда перемещение невозможно, контроллер перемещения может остановить работу.
[257] Кроме того, контроллер 113 перемещения выдает ошибку и может выдавать заранее установленный предупреждающий звуковой сигнал или голосовое руководство по мере необходимости.
[258] Фиг.5 является блок-схемой, кратко показывающей конфигурацию устройства для очистки подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[259] Как показано на фиг.5, устройство 180 для очистки обеспечивает перемещение основного корпуса 10 при очистке поверхности пола.
[260] Устройство 180 для очистки включает в себя приводной узел 181, протирочную тряпку 90, вращающуюся швабру 80, 185, узел подачи воды и электродвигатель 182.
[261] Вращающаяся швабра 185, 80 соединена с вращающимся валом электродвигателя 182 для вращения.
[262] Вращающаяся швабра 185 включает в себя первую вращающуюся пластину 81 и вторую вращающуюся пластину 82.
[263] Кроме того, вращающаяся швабра 185 может дополнительно включать в себя регулятор (не показан), который регулирует расстояние между корпусом и первой вращающейся пластиной 81 и расстояние между корпусом и второй вращающейся пластиной 82, так что протирочные тряпки 90, 91, 92, закрепленные на первой вращающейся пластине 81 и второй вращающейся пластине 82, могут контактировать с поверхностью пола. Регулятор может прикладывать давление заданной силы, так что первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 могут контактировать с поверхностью пола. Соответственно, протирочные тряпки закреплены на первой вращающейся пластине 81 и второй вращающейся пластине 82 для контакта с поверхностью пола, независимо от толщины.
[264] Первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 могут быть выполнены таким образом, что первая и вторая протирочные тряпки 91 и 92 могут быть установлены непосредственно на первой и второй вращающихся пластинах, соответственно. Например, липучка может быть закреплена на первой вращающейся пластине 81 и второй вращающейся пластине 82 для закрепления протирочных тряпок.
[265] Кроме того, рамы для протирочных тряпок (не показаны) могут быть установлены на первой вращающейся пластине 81 и второй вращающейся пластине 82. Протирочные тряпки плотно прилегают к рамам для протирочных тряпок и установлены на первой вращающейся пластине 81 и второй вращающейся пластине 82.
[266] Первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 вращаются и работают независимо друг от друга. Приводной узел может управлять таким образом, что первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 вращаются в соответствии с разными схемами.
[267] Первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 соединены с вращающимся валом электродвигателя, вращаются и могут работать в разных направлениях и с разными скоростями вращения.
[268] Приводной узел 181 управляет скоростью вращения, приведением в действие и остановкой электродвигателя 182 в соответствии с командой управления с контроллера 113 перемещения. Приводной узел 181 подает рабочую мощность для приведения в действие электродвигателя.
[269] Приводной узел 181 работает, когда основной корпус 10 перемещается к месту назначения по траектории перемещения или очищает заданную область.
[270] Приводной узел 181 управляет электродвигателем 182 таким образом, что первая и вторая вращающиеся пластины вращаются независимо. Приводной узел 181 управляет электродвигателем 182 посредством определения того, что приводить ли в действие первую вращающуюся пластину 81 и вторую вращающуюся пластину 82, и регулировать ли скорости вращения первой вращающейся пластины 81 и второй вращающейся пластины 82 в соответствии с траекторией перемещения, формой области, а также размером и местоположением препятствия.
[271] Электродвигатель 182 передает вращательное усилие первой вращающейся пластине и второй вращающейся пластине. Электродвигатель 182 может быть выполнен во множественном числе. Например, первый электродвигатель (не показан) может быть соединен с первой вращающейся пластиной, и второй электродвигатель (не показан) может быть соединен со второй вращающейся пластиной.
[272] Электродвигатель 182 вращает первую вращающуюся пластину 81 в первом направлении и вращает вторую вращающуюся пластину 82 во втором направлении, которое является направлением, противоположным первому направлению, так что основной корпус 10 может перемещаться вперед.
[273] Кроме того, в случае перемещения влево или вправо по траектории перемещения электродвигатель 182 может вращать первую вращающуюся пластину и вторую вращающуюся пластину по-разному для перемещения основного корпуса 10. Электродвигатель может вращать основной корпус 10 посредством остановки одной из первой вращающейся пластины и второй вращающейся пластины и вращения другой.
[274] Узел 183 подачи воды подает воду, содержащуюся в емкости для воды, на протирочную тряпку. Узел подачи воды подает воду на протирочную тряпку, в то время как основной корпус 10 выполняет очистку, так что протирочная тряпка может оставаться влажной.
[275] Узел 183 подачи воды подает заданное количество воды на протирочные тряпки в течение заданного периода времени. Узел 183 подачи воды включает в себя соединительный канал потока, который соединяет протирочные тряпки и емкость для воды.
[276] Когда приведение в действие электродвигателя прекращено приводным узлом 181, узел 183 подачи воды может прекратить подачу воды. Узел 183 подачи воды может включать в себя клапан (не показан), который управляет подачей воды на протирочные тряпки. Кроме того, узел 183 подачи воды может включать в себя насос (не показан), который управляет подачей воды из емкости для воды на протирочные тряпки.
[277] Когда приведение в действие электродвигателя прекращено, контроллер 110 может остановить работу насоса или закрыть клапан для предотвращения подачи воды на протирочные тряпки.
[278] Фиг.6 и 7 являются диаграммами, на которые ссылаются для объяснения траектории перемещения в соответствии с состоянием пола подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[279] Как показано на фиг.6, подвижный робот 1 может перемещаться по траектории D перемещения. Подвижный робот 1 может перемещаться линейно.
[280] Когда электродвигатель устройства 180 для очистки начинает вращаться, первая и вторая вращающиеся пластины вращаются, так что действует сила трения между протирочной тряпкой и поверхностью пола, и, соответственно, подвижный робот 1 перемещается в заданном направлении. Протирочная тряпка вращается для очистки поверхности пола от инородных веществ.
[281] Поскольку первая вращающаяся пластина 81 вращается в первом направлении, и вторая вращающаяся пластина 82 вращается во втором направлении, подвижный робот 1 может перемещаться по прямой линии.
[282] Кроме того, подвижный робот 1 может перемещаться или поворачиваться влево или вправо посредством установки скорости вращения первой и второй вращающихся пластин по-разному или посредством установки одинакового направления вращения для первой и второй вращающихся пластин.
[283] Поскольку первая протирочная тряпка 91 и вторая протирочная тряпка 92 установлены на первой и второй вращающихся пластинах, соответственно, подвижный робот 1 очищает поверхность пола протирочными тряпками при перемещении.
[284] В то время как подвижный робот 1 перемещается, узел 183 подачи воды подает воду из емкости 32 для воды на протирочную тряпку 90 для поддержания протирочной тряпки влажной.
[285] Подвижный робот 1 может отклоняться от траектории перемещения в пределах диапазона ошибок для перемещения. При обнаружении препятствия подвижный робот 1 может изменить траекторию перемещения или перемещаться за пределами траектории перемещения. Кроме того, в зависимости от материала пола или вращения вращающейся швабры 80 подвижный робот 1 может отклоняться от траектории в пределах заданного диапазона ошибок для перемещения.
[286] При перемещении контроллер 110 определяет изменение местоположения на основании смещения расстояния и угла. Используя устройство 114 распознавания местоположения или узел 150 датчиков, контроллер 110 рассчитывает значение местоположения относительно расстояния перемещения и угла вращения.
[287] Контроллер 110 рассчитывает значение координат на основании расстояния перемещения по оси X и оси Y и сохраняет значение местоположения. Кроме того, контроллер 110 может сохранять расстояние перемещения по оси X и оси Y и угол вращения, измеренный датчиком угла, в качестве значения местоположения.
[288] Контроллер может рассчитывать значение местоположения на основании угла, измеренного гиродатчиком, и расстояния перемещения, измеренного лазерным оптоволоконным датчиком. Кроме того, контроллер 110 может рассчитать расстояние перемещения и угол вращения на основании числа оборотов электродвигателя и скорости вращения устройства 180 для очистки. Контроллер 110 может рассчитывать расстояние перемещения и угол вращения на основании полученного изображения. Кроме того, контроллер может установить опорное значение для угловой траектории на основании значения, которое в 1,5 раза больше радиуса основного корпуса.
[289] Контроллер 110 рассчитывает фактическое значение местоположения основного корпуса на основании траектории D перемещения при перемещении, и когда изменение местоположения меньше заданного расстояния, это является нормальным перемещением в пределах диапазона ошибок, и, таким образом, контроллер определяет нормальное перемещение. Например, диапазон ошибок может быть установлен в диапазоне 3-5 мм, и диапазон ошибок может быть изменен в соответствии с настройкой.
[290] Если изменение местоположения больше заданного расстояния, это рассматривается как отклонение от траектории перемещения, и контроллер 110 определяет аномальное перемещение.
[291] В соответствии с изменением местоположения во время перемещения контроллер 110 рассчитывает 11-е расстояние D11 и 12-е расстояние D12 и определяет то, что являются ли 11-е расстояние и 12-е расстояние больше заданного расстояния. Когда 11-е расстояние и 12-е расстояние меньше заданного расстояния, они попадают в диапазон ошибок, и, таким образом, контроллер 110 определяет нормальное перемещение по траектории перемещения.
[292] Кроме того, как показано на фиг.7, контроллер 110 рассчитывает 21-е расстояние D21, 22-е расстояние D22 и 23-е расстояние D23 на основании траектории D перемещения и сравнивает рассчитанные расстояния с заданным расстоянием.
[293] Когда 21-е расстояние D21, 22-е расстояние D22 и 23-е расстояние D23 меньше заданного расстояния, контроллер 110 определяет нормальное перемещение.
[294] Когда 21-е расстояние D21, 22-е расстояние D22 и 23-е расстояние D23 равны или больше заданного расстояния, контроллер 110 определяет отклонение от траектории перемещения и, таким образом, определяет аномальное перемещение. Контроллер 110 рассчитывает информацию о местоположении, где происходит аномальное перемещение, и сохраняет информацию о местоположении.
[295] Например, когда на поверхности пола присутствуют инородные вещества, такие как вода, масло, сок и т.д., это может привести к разнице вращения любой из первой вращающейся пластины и второй вращающейся пластины во время перемещения, таким образом, вызывая проскальзывание основного корпуса 10 в конкретном направлении.
[296] На основании момента времени, когда определено аномальное перемещение, контроллер 110 может устанавливать и сохранять соответствующее местоположение в качестве местоположения, в котором происходит аномальное перемещение. На основании момента времени, когда определено аномальное перемещение, контроллер 110 может установить область в пределах заданного расстояния от соответствующего местоположения в качестве местоположения, где происходит отклонение. На основании момента времени, когда определено аномальное перемещение, контроллер 110 может устанавливать заданную область на основании траектории перемещения в течение заданного периода времени до момента времени в качестве местоположения, где происходит аномальное перемещение.
[297] Кроме того, контроллер 110 передает данные о местоположении, где происходит аномальное перемещение, на терминал, так что местоположение отображается на карте.
[298] Когда происходит аномальное перемещение, контроллер 110 определяет то, что возможно ли перемещение, и затем возвращается к существующей траектории перемещения для продолжения перемещения.
[299] При этом, когда происходит аномальное перемещение, контроллер 110 определяет то, что вращается ли вращающаяся швабра 80 нормально на основании значения тока электродвигателя.
[300] Когда подвижный робот находится на заданном расстоянии от траектории перемещения, в то время как вращающаяся швабра вращается нормально, контроллер 110 определяет то, что происходит аномальное перемещение. Контроллер 110 может определить, что аномальное перемещение происходит из-за инородного вещества на поверхности пола.
[301] Когда происходит аномальное перемещение, контроллер 110 может установить повторную очистку для области в пределах заданного расстояния на основании местоположения, где произошло аномальное перемещение, или для области, соединяющей множество местоположений, где происходит аномальное перемещение.
[302] При этом, когда аномальное перемещение происходит постоянно с начала перемещения, контроллер 110 может определить то, что аномальное перемещение вызвано неисправностью приводного узла или электродвигателя, или иногда материалом поверхности пола.
[303] Когда аномальное перемещение вызвано материалом поверхности пола, контроллер 110 может изменять заданное расстояние, которое является опорным значением для диапазона ошибок, для изменения критерия для определения аномального перемещения. Например, если поверхность пола представляет собой скользкое стекло или мрамор, заданное расстояние для определения аномального перемещения может быть увеличено для продолжения перемещения.
[304] Во время перемещения контроллер 110 может определять материал поверхности пола на основании значения тока электродвигателя. Поскольку скользкий материал имеет небольшое трение с протирочной тряпкой, обнаружено небольшое значение тока по сравнению со значением тока, обнаруженным в соответствии с обнаружением общего материала пола, и, соответственно, материал поверхности пола может быть определен с учетом вышеизложенного.
[305] В случае, когда уровень воды в емкости 32 для воды равен или больше конкретного значение, протирочная тряпка обычно установлена, и электродвигатель или приводной узел работают нормально, если значение тока 100-300 мА определено на основании влажной протирочной тряпки, относительно которой может быть обнаружено значение тока электродвигателя в диапазоне 350-8000 мА, контроллер 110 может определить то, что материал пола является скользким материалом.
[306] В то время как уровень воды в емкости для воды равен или больше заданного значения, когда значение тока определяется в диапазоне 100-300 мА, за исключением, когда подача воды является аномальной, обнаруженное значение тока может быть равно или меньше значения тока при сухой протирочной тряпке в диапазоне 250-350 мА, и, таким образом, материал пола может быть определен как материал с небольшим трением. При этом, при обнаружении значения тока 700-900 мА материал пола может быть определен как материал с большим трением.
[307] Кроме того, при возникновении неисправности приводного узла или электродвигателя контроллер останавливает работу и выдает предупреждение через блок вывода.
[308] Когда очистка в заданной области завершена после возникновения аномального перемещения, контроллер 110 может выполнить повторную очистку в местоположении, где возникает отклонение. Контроллер 110 может немедленно выполнить повторную очистку на основании момента времени, когда возникает отклонение, и порядок повторной очистки может быть изменен в соответствии с настройкой. В некоторых случаях порядок повторной очистки может быть установлен в соответствии с командой пользователя, введенной с оператора или терминала.
[309] Когда в конкретном местоположении повторно происходит аномальное перемещение, контроллер 110 может сначала очистить область на основании местоположения, может исключить соответствующую область из перемещения для очистки области в последнюю очередь, или может установить соответствующую область в качестве отдельной исключенной области, где должна быть выполнена интенсивная очистка.
[310] Фиг.8 является диаграммой, иллюстрирующей карту, на которой отображено аномальное перемещение подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[311] Подвижный робот 1 передает данные о местоположении, в котором происходит аномальное перемещение, на терминал 300.
[312] Терминал 300 может вводить команду очистки для всей области или выбранной части внутренней области, разделенной на множество областей. Терминал 300 передает команду очистки подвижному роботу 1. Кроме того, терминал 300 может отображать состояние очистки на основании данных, полученных с подвижного робота 1, и отображать местоположение подвижного робота.
[313] Кроме того, как показано на фиг.8, терминал 300 отображает местоположения P1-P5, где происходит аномальное перемещение, на карте на основании данных, полученных с подвижного робота 1.
[314] Терминал или подвижный робот устанавливает повторную очистку области в пределах заданного расстояния на основании местоположений P1-P5, где происходит аномальное перемещение. Кроме того, терминал или подвижный робот может устанавливать повторную очистку посредством установки области, соединяющей множество местоположений, в соответствии с расстоянием между местоположениями, где возникает отклонение, и может выполнять интенсивную очистку для многократной очистки соответствующих местоположений или соответствующей области.
[315] Например, область может быть установлена посредством соединения третьей точки P3 и четвертой точки P4, и область может быть установлена для повторной очистки.
[316] Относительно местоположения, в котором происходит аномальное перемещение, терминал 300 может установить повторную очистку выбранной области в соответствии с вводом пользователя.
[317] Кроме того, относительно местоположения, в котором происходит аномальное перемещение, терминал 300 может устанавливать порядок повторной очистки в соответствии с вводом пользователя.
[318] Терминал 300 может выдавать информацию о местоположении, где происходит аномальное перемещение, и причину аномального перемещения, например, проскальзывание.
[319] Кроме того, терминал 300 может выводить через всплывающее окно сообщение, в котором запрашивается замена протирочной тряпки. Подвижный робот 1 может также отображать через блок вывода сообщение, уведомление и тому подобное, в которых запрашивается замена протирочной тряпки.
[320] Терминал 300 хранит совокупно информацию о местоположении, в котором происходит аномальное перемещение, и когда в конкретном местоположении многократно происходит проскальзывание, терминал 300 может установить местоположение как отдельную исключенную область.
[321] Терминал 300 может устанавливать прежде всего очистку области, где многократно происходит проскальзывание, или очистку соответствующей области в последнюю очередь после очистки других областей.
[322] Терминал 300 может устанавливать перемещение при обходе соответствующей области.
[323] Кроме того, терминал 300 может отображать информацию об области, где многократно происходит проскальзывание. Например, интенсивная очистка может быть установлена таким образом, что если другая область очищается один раз, то область, где многократно происходит проскальзывание, очищается дважды или трижды.
[324] Кроме того, терминал 300 может отображать информацию об области, где многократно происходит проскальзывание.
[325] Фиг.9 и 10 являются примерами видов, на которые ссылаются для объяснения перемещения подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[326] Фиг.9 является диаграммой, иллюстрирующей множество траекторий перемещения подвижного робота 1 для перемещения прямо вперед. Горизонтальная ось представляет расстояние, и вертикальная ось представляет ширину перемещения для перемещения влево и вправо, когда прямолинейная траектория определена как 0.
[327] Даже если подвижный робот 1 установлен для перемещения прямо вперед, подвижный робот не перемещается в соответствии с вращением колеса, а перемещается в соответствии с вращением вращающейся швабры 80, и, таким образом, подвижный робот может перемещаться при отклонении от траектории перемещения влево или вправо.
[328] Кроме того, поскольку подвижный робот 1 перемещается в состоянии, в котором протирочная тряпка плотно соединена с поверхностью пола, подвижный робот может перемещаться при отклонении от траектории перемещения влево или вправо из-за материала пола или инородного вещества на полу.
[329] Соответственно, диапазон ошибок установлен на основании траектории перемещения, и ширина перемещения в соответствии с изменением местоположения рассчитывается для определения нормального перемещения или аномального перемещения. Перемещение в пределах диапазона ошибок определяется как нормальное перемещение.
[330] Например, определение может быть выполнено на основании опорной линии, когда диапазон ошибок составляет 2 мм (L1, L2), и опорной линии, когда диапазон ошибок составляет 4 мм (L3, L4). Кроме того, диапазон ошибок может быть установлен на 5 мм. Диапазон ошибок может быть изменен в соответствии с настройкой.
[331] В некоторых случаях возможно установить разные диапазоны ошибок для левой и правой сторон с учетом характеристик перемещения подвижного робота. Например, когда подвижный робот имеет характеристику перемещения при отклонении вправо, диапазон ошибок для левой стороны может быть установлен на 3 мм, и диапазон ошибок для правой стороны может быть установлен на 5 мм.
[332] Когда подвижный робот 1 перемещается по прямой линии, подвижный робот 1 может отклоняться на заданное расстояние от траектории перемещения, как в 11-й точке P11 и 12-й точке P12.
[333] Когда диапазон ошибок установлен на 2 мм относительно опорной линии L1 слева и опорной линии L2 справа, отклонение влево происходит от точки 250 мм, тогда как отклонение вправо может происходить непрерывно после точки 50 мм. Когда диапазон ошибок установлен на 2 мм, подвижный робот часто определяет аномальное перемещение, таким образом, необходимо изменить диапазон ошибок для определения состояние перемещения.
[334] Когда диапазон ошибок установлен на 4 мм относительно левой опорной линии L3 и правой опорной линии L4, нормальное перемещение подвижного робота может происходить с левой стороны, тогда как аномальное перемещение подвижного робота может происходить с правой стороны в 11-й точке P11 и 12-й точке P12.
[335] Поскольку основной корпус имеет характеристику перемещения по прямой линии при отклонении вправо, контроллер 110 может устанавливать разные диапазоны ошибок для левой и правой сторон.
[336] Кроме того, контроллер 110 может компенсировать перемещение подвижного робота путем выполнения компенсирующего перемещения, как показано на фиг.10.
[337] Когда подвижный робот перемещается при отклонении вправо, контроллер 110 устанавливает разные скорости вращения первой и второй вращающихся пластин, так что основной корпус может перемещаться при отклонении в левую сторону, таким образом, корректируя отклонение в правую сторону.
[338] Кроме того, контроллер 110 может выполнять компенсирующее перемещение на основании момента времени, в который происходит аномальное перемещение, такого как 11-я точка P11 и 12-я точка P12.
[339] Компенсирующее перемещение заключается в корректировке работы таким образом, чтобы фактическая траектория перемещения была прямолинейной. Компенсирующее перемещение может быть установлено в соответствии с частотой возникновения отклонения влево или вправо от диапазона ошибок или в соответствии с шириной перемещения.
[340] Фиг.11 является диаграммой, на которую ссылаются для объяснения времени перемещения в соответствии с аномальным перемещением подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[341] Как описано выше, контроллер 110 может выполнять компенсирующее перемещение, когда происходит аномальное перемещение или когда обнаружено перемещение при отклонении в конкретном направлении.
[342] Во время компенсирующего перемещения первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 в вращающейся швабре 80 приводятся в движение по разным схемам, поэтому для обеих сторон установлены разные нагрузки, таким образом, увеличивая время перемещения по сравнению со случаем перемещения по прямой линии с одинаковой нагрузкой для обеих сторон.
[343] Как показано на фиг.11, A - значение времени перемещения, измеренное до достижения заданного расстояния перемещения во время основного перемещения, и B - значение времени перемещения, измеренное до достижения конкретного расстояния перемещения во время компенсирующего перемещения. Например, среднее время перемещения может составлять около 7,2 секунды, тогда как среднее время компенсирующего перемещения может составлять около 8,3 секунды.
[344] По мере увеличения времени перемещения в случае компенсирующего перемещения контроллер 110 может устанавливать частоту возникновения аномального перемещения и выполнять ли компенсирующее перемещение в соответствии с шириной перемещения.
[345] Когда необходимо завершить очистку за короткий промежуток времени или когда область, подлежащая очистке, является большой, контроллер 110 может определить то, что выполнять ли компенсирующее перемещение. Однако, когда степень проскальзывания является большой, то есть, когда ширина перемещения является большой, контроллер 110 управляет вращающейся шваброй 80 таким образом, чтобы основной корпус перемещался с использованием компенсирующего перемещения.
[346] Кроме того, когда количество возникновений аномального перемещения в конкретном местоположении равно или больше заданного значения или более, контроллер 110 может установить прохождение через соответствующую область с использованием компенсирующего перемещения.
[347] Даже когда аномальное перемещение не компенсируется вследствие компенсирующего перемещения, контроллер может установить местоположение, в котором происходит аномальное перемещение по соответствующей траектории, в соответствии с тем, что выполняется ли компенсирующее перемещение, и временем перемещения.
[348] Фиг.12 является диаграммой, на которую ссылаются для объяснения аномального перемещения подвижного робота в соответствии с вариантом осуществления настоящего изобретения.
[349] Как показано в (а) на фиг.12, подвижный робот 1 перемещается в соответствии с вращением вращающейся швабры в состоянии, в котором подвижный робот установлен для перемещения по траектории D1 перемещения.
[350] Однако, от основного корпуса к вращающейся швабре может быть приложена другая нагрузка в зависимости от внутренней конструкции основного корпуса 10 и расположений элементов. Соответственно, даже когда первая вращающаяся пластина 81 и вторая вращающаяся пластина 82 вращаются одинаково, подвижный робот может перемещаться при отклонении в конкретном направлении вследствие дисбаланса веса основного корпуса.
[351] Как показано в (b) на фиг.12, перемещение в пределах диапазона ошибок 2-6 мм может быть определено как нормальное перемещение, но когда происходит отклонение 10-33 мм от ширины перемещения, как показано на чертеже, контроллер 110 выполняет компенсирующее перемещение.
[352] Контроллер может выполнять компенсирующее перемещение посредством регулировки угол наклона влево-вправо вращающейся швабры.
[353] Контроллер может выполнять компенсирующее перемещение посредством установки разных скоростей вращения для первой вращающейся пластины 81 и второй вращающейся пластины 82 вращающейся швабры.
[354] Контроллер 110 может сравнивать траекторию перемещения и траекторию перемещения, сохранять совокупно то же самое и определять характеристики перемещения основного корпуса на основании сохраненной информации.
[355] Когда проскальзывание происходит временно или в конкретном местоположении из-за инородных веществ на полу, контроллер 110 выполняет основное перемещение, и когда аномальное перемещение происходит повторно, контроллер выполняет компенсирующее перемещение.
[356] Когда основной корпус имеет характеристику перемещения при отклонении в конкретном направлении, контроллер 110 может изменить настройку для основного перемещения таким образом, чтобы характеристики перемещения корректировались для перемещения.
[357] Кроме того, контроллер 110 может устанавливать разные диапазоны ошибок для левой и правой сторон для определения того, что выполняется ли аномальное перемещение.
[358] Фиг.13 является блок-схемой, показывающей способ управления подвижным роботом в соответствии с вариантом осуществления настоящего изобретения.
[359] Как показано на фиг.13, когда введена команда очистки или команда перемещения в конкретное местоположение, подвижный робот 1 перемещается, в то время как вращающаяся швабра 80 вращается в операции S310. Когда протирочная тряпка 90, закрепленная на вращающейся швабре 80, вращается вращающейся шваброй, поверхность пола очищается.
[360] Приводной узел приводит в действие электродвигатель в соответствии с командой управления с контроллера и заставляет вращаться первую и вторую вращающиеся пластины 81 и 82, соединенные с электродвигателем. Направления вращения и скорости вращения первой вращающейся пластины и второй вращающейся пластины изменяются в соответствии с направлением перемещения.
[361] При перемещении в конкретное местоположение основной корпус 10 устанавливает траекторию перемещения к месту назначения и перемещается. При очистке области основной корпус 10 перемещается посредством установки схемы перемещения, соответствующей размеру или форме области, и установки траектории перемещения в соответствии со схемой перемещения. Например, основной корпус 10 может выполнять очистку во время перемещения по спиральной схеме, зигзагообразной схеме или Y-образной схеме, и также может устанавливать схему перемещения для заданного расстояния от препятствия.
[362] Контроллер 110 управляет вращающейся шваброй 80 для перемещения по траектории перемещения, анализирует фактическую траекторию перемещения на основании изменения местоположения в операции S320 и сравнивает траекторию перемещения с траекторией перемещения в операции S330 для расчета ширины перемещения, то есть, расстояния до местоположения, фактически перемещенного от траектории перемещения.
[363] Контроллер 110 определяет то, что отклоняется ли основной корпус от основной схемы перемещения в соответствии с траекторией перемещения на основании результата анализа в операции S340. Контроллер 110 может определять то, что отклоняется или нет траектория перемещения, посредством определения того, что находится ли ширина перемещения в соответствии с изменением местоположения в диапазоне ошибок. Когда ширина перемещения больше заданного расстояния в соответствии с диапазоном ошибок, как описано выше на фиг.7, определяется аномальное перемещение посредством отклонения от траектории перемещения. Когда ширина перемещения находится в пределах диапазона ошибок, определяется нормальное перемещение.
[364] В случае обычного перемещения очистка выполняется при перемещении в соответствии с заданной траекторией перемещения и схемой перемещения.
[365] Одновременно контроллер 110 сначала определяет то, что вызвано ли аномальное перемещение вследствие столкновения с препятствием или вызвано ли аномальное перемещение неисправностью электродвигателя или самого приводного узла. Контроллер 110 может определять то, что вызвано ли аномальное перемещение вследствие отклонения самого по себе на основании значения тока электродвигателя.
[366] Кроме того, контроллер 110 может определять то, что должным образом ли установлена протирочная тряпка. Когда основной корпус не перемещается или когда основной корпус вращается без отклонения на заданное расстояние, контроллер 110 может определить то, что протирочная тряпка не установлена. В некоторых случаях с помощью дополнительного датчика можно определить то, что установлена ли протирочная тряпка.
[367] Когда нет препятствия, электродвигатель или приводной узел работают нормально, и протирочная тряпка установлена, аномальное перемещение может быть определено вследствие состояния пола.
[368] Контроллер 110 может определять то, что является ли материал пола скользким материалом на основании значении тока электродвигателя.
[369] Кроме того, контроллер 110 может определять то, что вызвано ли аномальное перемещение посредством проскальзывания вследствие инородных веществ на полу. В случае перемещения на расстояние, большее фактическое расстояние перемещения, и в случае отклонения влево или вправо от траектории перемещения контроллер 110 может определить то, что проскальзывание происходит вследствие инородных веществ.
[370] Когда материал пола является скользким материалом, скольжение происходит с начала перемещения, и, таким образом, контроллер 110 может различать проскальзывание, вызванное материалом пола, и проскальзывание, вызванное инородными веществами.
[371] Когда происходит аномальное перемещение, контроллер 110 рассчитывает и сохраняет местоположение, где происходит аномальное перемещение, или информацию о местоположении в области на заданном расстоянии от местоположения в операции S350.
[372] Когда происходит аномальное перемещение, контроллер 110 генерирует уведомление, уведомляющее об аномальном перемещении, и выводит уведомление. Контроллер 110 может генерировать уведомление в форме предупреждающего сообщения, предупреждающего светового сигнала и предупреждающего звукового сигнала и выводить уведомление через блок вывода. Кроме того, контроллер 110 передает данные об аномальном перемещении на терминал и выводит уведомление через терминал 300 и управляет местоположением, в котором происходит аномальное перемещение, для отображения на карте.
[373] После того, как происходит аномальное перемещение, контроллер 110 может установить повторную очистку для местоположения или области, где происходит аномальное перемещение. Кроме того, контроллер 110 может установить повторную очистку посредством установки области, соединяющей местоположения, где происходит аномальное перемещение.
[374] После возникновения аномального перемещения контроллер 110 определяет то, возможно ли перемещение, и когда перемещение возможно, контроллер возвращается к траектории перемещения и продолжает очистку.
[375] Контроллер 110 возвращается к траектории перемещения для завершения заданной очистку в операции S360, и перемещается в местоположение или область, где происходит аномальное перемещение для повторного выполнения очистки в операции S380. В некоторых случаях, каждый раз, когда происходит аномальное перемещение, контроллер 110 может немедленно выполнить очистку в местоположении или области, где происходит аномальное перемещение, и может вернуться к траектории перемещения для выполнения заданной очистки.
[376] Когда повторная очистка завершена, контроллер 110 завершает очистку области в операции S390.
[377] Кроме того, контроллер 110 может совокупно сохранять данные о местоположении или области, где происходит аномальное перемещение, и когда аномальное перемещение происходит в конкретном местоположении или области более, чем установленное число раз, контроллер может установить местоположение или область как отдельную исключенную область. Когда установлена исключенная область аномального перемещения, контроллер 110 может выполнять очистку, за исключением соответствующей области, может сначала очистить исключенную область или очистить исключенную область в последнюю очередь, или много раз выполнить интенсивную очистку области.
[378] Кроме того, когда происходит аномальное перемещение, контроллер 110 может выдавать уведомление, которое требует замену протирочной тряпки.
[379] В случае аномального перемещения вследствие инородных веществ можно запросить протирочную тряпку, поскольку протирочная тряпка, возможно, загрязнена. Уведомление, требующее замену протирочной тряпки, может выводиться через блок вывода и терминал.
[380] После замены протирочной тряпки контроллер 110 может перейти к повторному выполнению очистки, или после повторной очистки области, в которой происходит аномальное перемещение, протирочная тряпка может быть заменена, и другие области могут быть очищены. Время замены протирочной тряпки и порядок повторной очистки могут быть изменены в соответствии с настройкой или в соответствии с командой пользователя, введенной через терминал.
[381] Подвижный робот в соответствии с настоящим примером осуществления, работающий, как указано выше, может быть выполнен в виде независимого аппаратного устройства и приводится в действие в виде, включенном в другие аппаратные устройства, такие как микропроцессор или компьютерная система общего назначения, в виде, по меньшей мере, одного процессора.
[382] Хотя настоящее изобретение описано со ссылкой на примеры осуществления, специалисты в данной области техники должны понимать, что различные изменения и модификации могут быть осуществлены без отхода от сущности и объема настоящего изобретения. Следовательно, примеры осуществления настоящего изобретения не являются ограничивающими, а являются иллюстративными, и сущность и объем настоящего изобретения не ограничиваются этим.
Реферат
Группа изобретений относится к подвижному роботу, в частности к подвижному роботу, способному очищать поверхность пола на основе вращения протирочной тряпки, установленной к поверхности пола при перемещении, и способу управления им. В соответствии с изобретением протирочная тряпка вращается с помощью электродвигателя для перемещения корпуса при очистке поверхности пола, так что изменение положения корпуса анализируется для определения состояния перемещения. Когда определено, что корпус аномально перемещается и отклоняется от настроенной траектории перемещения, соответствующее положение сохраняется, и повторная очистка выполняется, так что положение, в котором произошло аномальное перемещение, повторно очищается, и положение для следующей очистки может быть расположено с учетом положения, в котором произошло аномальное перемещение. Таким образом, изобретение позволяет увеличить эффективность очистки. 2 н. и 30 з.п. ф-лы, 13 ил.

Формула
Документы, цитированные в отчёте о поиске
Система робота-пылесоса, имеющая внешнее зарядное устройство, и способ стыковки с зарядным устройством
Робот-пылесос и способ управления роботом-пылесосом
Комментарии