Чистящее устройство, а также способ очищения поверхности - RU2705979C2
Код документа: RU2705979C2
Чертежи
Описание
Изобретение касается свободно парящего чистящего устройства для очищения поверхности без жесткого соединения между чистящим устройством и поверхностью. В частности, изобретение касается устройства для очищения ровных поверхностей, таких как, например, стеклянные поверхности или фасадные элементы.
Очищение стеклянных витрин с их внутренней стороны, в частности также с их наружной стороны, особенно трудно в случае больших стеклянных поверхностей. В высоких помещениях для чистки стеклянных поверхностей должны сооружаться передвижные подставки, которые позволяют доставать до подлежащих чистке поверхностей. На наружных фасадах применятся передвижные во горизонтали и по вертикали рабочие вышки, чтобы позволить чистильщикам стекол и/или фасадов чистить труднодостижимые витрины.
Вследствие единого оформления наружных фасадов наряду со стеклянными поверхностями оконных стекол должны также регулярно чиститься другие плоские поверхности внутренней стороны зданий.
Чистка этих поверхностей является трудоемкой и приводит к высоким затратам по поддержанию технического состояния зданий.
DE 10 2013 104 447 A1 описывает чистящее устройство, имеющее самовзбирающийся механизм передвижения. Такие чистящие устройства из-за высоких механических издержек и опасности загрязнений через присосы пригодны только для определенных целей применения.
WO 2013/076 711 A2 описывает вертолет для очищения фасадных поверхностей. Однако он не пригоден для свободного парения и поэтому нуждается в соединении канатами с некоторой стационарной точкой.
Поэтому в основе изобретения лежит задача, выполнить такое чистящее устройство так, чтобы чистильщику стекол и/или фасадов было легче чистить также труднодостижимые окна или фасадные поверхности.
Эта задача решается с помощью чистящего устройства, которое имеет летательный аппарат, имеющий винты, и закрепленное на летательном аппарате чистящее приспособление для очищения поверхности.
В основе изобретения лежит тот обнаруженный факт, что не чистильщик стекол и/или фасадов со своим чистящим агрегатом должен доставляться к подлежащей чистке поверхности, а что достаточно транспортировать к подлежащей чистке поверхности только чистящий агрегат. Если этот чистящий агрегат в виде чистящего приспособления закреплен на летательном аппарате, можно с помощью дистанционного управления доставлять летательный аппарат близко к подлежащей чистке поверхности, чтобы подлежащая чистке поверхность могла чиститься посредством чистящего приспособления. При этом для позиционирования чистящего устройства пригодны летательные аппараты, имеющие винты. Эти летательные аппараты могут также действовать автономно или частично автономно.
Такие летательные аппараты, имеющие винты, известны как БЛА (беспилотные летательные аппараты) или мультикоптеры. Особенно пригодны частично-автономные мультикоптерные системы для чистки стекол и фасадов во внутренней и наружной области. Подлежащие чистке поверхности являются, в частности, вертикальными поверхностями во внутренней и наружной области зданий. Однако посредством этого чистящего устройства могут также чиститься наклонные, горизонтальные или изогнутые поверхности. Одним из простых вариантов осуществления такого чистящего устройства является квадро- или гексакоптер, имеющий расстояние между осями винтов примерно 1100 мм. Весь летающий объект имеет при этом горизонтальную протяженность от 80 см до 120 см и конструктивную высоту от 60 см до 80 см.
Летательный аппарат имеет легкую и компактную конструкцию и спроектированы с учетом низкого веса. Внедрение системы щеток, а также применяемой сенсорики осуществляется с аэродинамических точек зрения. При этом дополнительно имеющиеся на борту компоненты, то есть, в частности, чистящее приспособление, проектируются так, что влияние на маневренность минимизировано.
Чистящее приспособление может распылять деионизованную воду.
Чистящее приспособление может иметь распылительное устройство для воды, сухого льда, деминерализованной/деионизованной воды. Предпочтительно, если чистящее приспособление имеет по меньшей мере одну вращающуюся щетку. Это позволяет, наряду с движением чистящего приспособления относительно подлежащей чистке поверхности, усиливать абразивный эффект чистящего устройства и тем самым достигать более высокой производительности чистки. Скребок или ракля могут помогать удалять особенно трудноудаляемую грязь.
Чтобы контролировать положение летательного аппарата и результат чистки, предлагается, чтобы чистящее устройство имело камеру. Это позволяет чистильщику окон, который пребывает на большом удалении от летательного аппарата, контролировать чистку на экране.
Одно из усовершенствований чистящего устройства предусматривает, что летательный аппарат имеет защитную раму для защиты винтов. Эта защитная рама защищает не только винты, но и подлежащую чистке поверхность и пользователя чистящего устройства. Предпочтительно, если весь каркас мультикоптера оснащается стиропоровым сердечником, который выполняет функцию рамы.
Для определения расстояния от летательного аппарата до подлежащей чистке поверхности предлагается, чтобы летательный аппарат имел сенсорику для измерения расстояния и/или обнаружения контакта. Эта сенсорика предпочтительно расположена на защитной раме летательного аппарата. Для этого предусмотрены бесконтактные и тактильные сенсоры для активного реагирования на приближение к объекту или на непосредственное соприкосновение летательного аппарата с объектом. Объект может также представлять собой подлежащую чистке поверхность, состоящую из стекла. В этом случае могут использоваться специальные сенсоры для распознавания стекла, такие как, напр., ультразвуковые сенсоры.
Особенно хороший эффект чистки может достигаться с помощью системы щеток, которая жестко соединена с летательным аппаратом. Эта система щеток состоит предпочтительно из нескольких вращающихся валковых щеток, привод осей которых осуществляется электродвигателями.
Предпочтительно, если чистящее устройство имеет устройство, передвигающееся на роликах или шариках. Жесткое расстояние между осями валковых щеток и очищаемой поверхностью может быть обеспечено, например, свободно вращающимися пластмассовыми роликами. Это приводит к тому, что контактные точки между летательным аппаратом и подлежащей чистке поверхностью заданы жестким пространственным расположением этих роликов. При этом расположение роликов может выбираться так, что при контакте происходит фиксация положения летательного аппарата относительно очищаемой поверхности. Благодаря этому чистящее устройство может обеспечивать постоянную производительность чистки также во время движения летательного аппарата.
Один из специальных вариантов осуществления чистящего устройства предусматривает, что чистящее приспособление установлено подвижно относительно летательного аппарата, и летательный аппарат имеет дальномер, который измеряет расстояние от чистящего приспособления до летательного аппарата. В одном из вариантов устройства чистящее приспособление тоже расположено подвижно относительно летательного аппарата, и летательный аппарат имеет манометрическое устройство, которое измеряет давление, действующее на летательный аппарат со стороны чистящего приспособления.
Чистящее приспособление может, наряду с камерами, иметь следующие другие сенсоры: инерциальные измерительные блоки (IMU, Inertial Measurement Unit), GPS, магнетометры, камеру, одномерный лидар, двухмерный лидар (англ. LIDAR, Light Identification Detection and Ranging - обнаружение, идентификация и определение дальности с помощью света), механические конечные выключатели и бесконтактные выключатели, а также ультразвуковые измерительные приборы. Данные этих сенсоров могут использоваться для управления и для локализации и навигации летательного аппарата по очищаемой поверхности. Аналитическая обработка изображений камеры позволяет, кроме того, качественно оценивать процесс чистки.
Лежащая в основе изобретения задача решается также с помощью способа очищения поверхностей, в частности фасадов и стеклянных фронтов в наружной области, при котором чистящая среда для чистки наносится на подлежащую чистке поверхность с помощью летательного аппарата.
Предпочтительно частично-автономное управление летательным аппаратом, которое обеспечивает возможность автоматического или частично автоматизированного процесса запуска и посадки. Благодаря этому, например, может быстро производиться пополнение бака для воды или замена аккумулятора. Управление может стабилизировать летательный аппарат после первого запуска на установленной дистанции от очищаемой поверхности. Тогда пользователь должен только устанавливать подлежащую чистке область, исходя из этого положения. Управление рассчитывает соответствующий путь и стабилизирует летательный аппарат по очищаемой поверхности. Когда запас воды исчерпан или состояние заряда аккумулятора приближается к критически низкому значению, начинается автоматический процесс посадки, чтобы можно было заменить аккумулятор, соответственно, пополнить воду. Когда данный недостаток устранен, летательный аппарат автоматически возвращается в свое предыдущее положение относительно очищаемой поверхности.
Предпочтительно, когда применяются несколько летательных аппаратов. Тогда летательный аппарат может с помощью своего чистящего приспособления обрабатывать очищаемую поверхность, пока не будет исчерпан заряд аккумулятора или запас воды. Тогда первое чистящее устройство вместе с летательным аппаратом и чистящим приспособлением летит обратно, чтобы пополнить аккумуляторы и/или запас воды, а второе чистящее устройство летит к тому месту, в котором первое чистящее устройство закончило обработку. В случае больших подлежащих чистке поверхностей второе чистящее устройство может взлетать уже тогда, когда первое еще работает, чтобы между обработкой с помощью первого чистящего устройства и обработкой с помощью второго чистящего устройства проходило как можно меньше времени и достигалась квази непрерывная чистка.
Для очень больших зданий предлагается группа чистящих устройств. Это позволяет осуществлять чистку одновременно с помощью нескольких чистящих устройств. При этом могут также иметься меньше посадочных площадок, чем чистящих устройств, так как время пребывания на посадочной площадке должно было бы быть существенно короче, чем время чистки.
В случае нескольких летательных аппаратов предпочтительно, если они непосредственно или через центральное управление поддерживают связь друг с другом. Тем самым гарантируется, что поверхности не будут ни подвергаться двойной чистке, ни оставаться неочищенными.
Может также создаваться комплекс летательных аппаратов и комплекс чистящих приспособлений. Это позволяет объединять летательный аппарат и чистящее приспособление, в зависимости от потребности. Например, одно чистящее приспособление может быть оснащено щеткой, а другое чистящее приспособление - устройством для распыления воды. Тогда летательный аппарат может, в зависимости от потребности, объединяться с подходящим чистящим приспособлением. В частности, несколько летательных аппаратов и несколько предпочтительно различных чистящих приспособлений делают возможным эффективный процесс чистки.
В то время как чистильщик для чистки большого фасада должен был бы иметь все чистящие инструменты и все чистящие средства при себе, предлагаемый изобретением проект включает в себя также возможность оснащения чистящего устройства в соответствии с необходимостью, а также быстрого переоснащения. Наблюдение за подлежащей чистке поверхностью во время ее обработки и запоминание данных позволяет также определять поверхности с трудноудаляемой грязью, чтобы затем дополнительно обрабатывать именно эти поверхности с помощью другого чистящего приспособления. Для этого летательный аппарат после первой чистки может подлетать именно к тем местам, которые должны обрабатываться дополнительно - предпочтительно с помощью другого чистящего средства и/или другого чистящего приспособления.
В качестве чистящей среды может применяться деионизованная вода. Правда, например, из DE 20 2004 009 740 U1 известно применение для очищения поверхностей ионизированной воды, чтобы можно было обойтись без вытирания и сушки. Однако применение ионизированной воды в комбинации со свободно летающим чистящим устройством приводит к тому преимуществу, что при чистке сверху вниз нижние области уже могут предварительно очищаться стекающей водой, и благодаря ветру винтов летательного аппарата достигается очень быстрое высушивание пристающей водяной пленки. Этой водой может снабжаться система щеток для увлажнения подлежащей чистке поверхности и для распыления.
Альтернативно или кумулятивно в качестве чистящей среды может применяться сухой лед. Сухой лед (гранулы CO2), который, например, напыляется на фасады, вызывает переохлаждение. В комбинации с вращающимися щетками это приводит к откалыванию загрязнений, которые падают на землю. Правда, DE 20 2013 105 041 U1 описывает принципиальное применение сухого льда для чистки особенно сильно загрязненных поверхностей посредством распылительного пистолета. Именно это применение в комбинации с летательным аппаратом и щеткой приводит к тому, что сухой лед прижимается ветром винтов к поверхности, там реагирует и не оставляет остатков.
При попадании на препятствие, такое как, например, стеклянная витрина или фасад, сухой лед разлагается на газообразные составляющие, так что не возникает или не остается мокроты.
Чтобы, с одной стороны, не повредить витрину, а с другой стороны, также можно было оказывать с помощью чистящего приспособления некоторое давление на подлежащую чистке поверхность, предлагается измерять относительное положение летательного аппарата по отношению к подлежащей чистке поверхности.
Кумулятивно или альтернативно предлагается, чтобы измерялось абсолютное положение летательного аппарата по отношению к подлежащему чистке фасаду. Для этого стационарные точки фиксации, например, на земле или на фасаде, могут служить системой отсчета для установления на здании положения подлежащих чистке поверхностей. Точками фиксации на фасаде могут быть, например, угловые точки здания. Но перед зданием может также раскладываться настил, имеющий заданные точки. Тогда положение чистящего приспособления может определяться во время полета относительно этих заданных точек. Это позволяет определять контактные точки по отношению к заданным точкам при контакте с подлежащей чистке поверхностью. Кроме того, такой настил перед зданием облегчает автоматический запуск и посадку чистящего устройства на этом настиле.
Предпочтительно, если летательный аппарат подлетает к подлежащей чистке поверхности таким образом, что закрепленное на летательном аппарате чистящее приспособление прижимается к подлежащей чистке поверхности и движется по поверхности. Для этого управление удерживает мультикоптер под определенным углом наклона в несколько градусов по отношению к подлежащей чистке поверхности. Этот угол называется также углом тангажа. При соударении с подлежащей чистке поверхностью возникает давление между подлежащей чистке поверхностью и прилегающим чистящим устройством. Это давление используется, например, в качестве давления прижатия чистящих щеток для обеспечения длительного контакта между чистящей щеткой и подлежащей чистке поверхностью. Но оно может также компенсировать импульс, который отталкивает чистящее устройство от подлежащей чистке поверхности при распылении чистящей жидкости на подлежащую чистке поверхность.
Летательный аппарат может также подлетать к подлежащей чистке поверхности с разгоном. Это повышает давление чистящей щетки или скребка на подлежащую чистке поверхность. Однако разгон может также ослабляться импульсом, который возникает, когда чистящее приспособление распыляет жидкость на подлежащую чистке поверхность.
Чистящая система имеет чистящее устройство, несколько подлежащих чистке поверхностей и окружающую эти подлежащие чистке поверхности топологию. В памяти данных сохраняются точки отсчета топологии, и для автоматического ведения чистящего приспособления по подлежащим чистке поверхностям находятся, с одной стороны, положение чистящего устройства относительно этих точек отсчета, а с другой стороны, положение чистящего устройства по отношению к подлежащей чистке поверхности.
Это позволяет чистить с помощью чистящего устройства также большие фасады. В зависимости от размера летательного устройства и загрязнения фасада, совершается однократный и многократный подлет к подлежащим чистке поверхностям для смачивания их чистящей жидкостью, чистки поверхности щетками, отделения частиц грязи, смывания грязи и при необходимости даже сушки горячим воздухом или напыления грязеотталкивающего слоя.
При этом для высотного дома чистящее устройство может программироваться таким образом, чтобы оно автономно постепенно чистило все подлежащие чистке поверхности и затем снова начинало сначала или чистило определенные поверхности чаще, а другие поверхности менее часто. При этом летательный аппарат передвигает чистящее приспособление от станции забора чистящего средства к подлежащей чистке поверхности, затем во время чистки относительно подлежащей чистке поверхности и снова обратно для забора нового чистящего средства. При этом станция забора чистящего средства и защищенное помещение для летательного аппарата и чистящего приспособления могут предусматриваться, например, на крыше высотного дома.
Можно также объединять летательный аппарат с различными чистящими приспособлениями, чтобы, например, в первом рабочем ходе только опрыскивать подлежащую чистке поверхность, так чтобы отделялась грязь, а во втором рабочем ходе чистить поверхность щетками, чтобы счищать щетками отделенную грязь. Эта грязь может затем смываться в третьем рабочем ходе. Это приводит к тому, что летательный аппарат нагружается только весом, который обязательно необходим для конкретного хода чистки. При этом летательный аппарат может сначала объединяться только с баком для жидкости и наносящей форсункой, а после этого дополнительно или альтернативно со щеткой или системой щеток. Также устройства локализации могут предоставляться в распоряжение для объединения с летательным объектом различных устройств локализации, в зависимости от применения. Этот процесс объединения и разъединения осуществляется предпочтительно автоматически. При этом образуется предпочтительно модульная система летающего чистящего приспособления для чистки фасадов.
Чистящее устройство ориентировано на по возможности автономное выполнение процесса чистки. Чистильщик должен был бы выполнять только лишь контролирующую функцию, и задействоваться в экстренном случае и для пополнения или замены емкостей для чистки.
Для этого предлагается сенсорная схема, с помощью которой может определяться положение чистящего приспособления абсолютно и относительно подлежащей чистке поверхности.
В случае зданий, имеющих один или до 10 этажей выше первого, на жесткой дистанции перед фасадом чистильщиком раскладывается маркированный настил. Эти маркировки регистрируются с помощью камеры, закрепленной на летательном аппарате, для определения положения чистящего приспособления относительно фасада. Это положение составляет основу всего процесса чистки. Однако в области, близкой к очищаемой поверхности, соответственно, при непосредственном контакте чистящее устройство нуждается в большем количестве данных, так как найденное с помощью маркированного настила положение может иметь небольшие погрешности. Тогда здесь применяется ультразвук и/или оптические устройства измерения расстояния и скорости. Лидарные системы испускают лазерные импульсы и обнаруживают рассеиваемый обратно свет. По времени прохождения света сигналов рассчитывается удаленность от места рассеивания. Лидарные системы служат для распознавания объектов и регистрации окрестностей и используются в чистящем приспособлении для точного определения расстояния до очищаемой поверхности.
При этом тактильные сенсоры в последнем шаге служат для установления контакта между чистящим устройством и поверхностью. С помощью этих данных регулятор поддерживает чистящее приспособление в слегка наклоненном положении, так что чистящее устройство оказывает на очищаемую поверхность относительно легкое усилие. При этом скорость, с которой чистящее устройство летит вперед при сталкивании с поверхностью, превращается в давление, которое чистящее устройство оказывает на поверхность.
У более высоких зданий регистрация маркировок на земле уже невозможна. При этом нужны другие сенсоры. При этом лежащая в основе модель здания может использоваться для локализации, то есть для определения положения чистящего приспособления. Такая модель может либо автоматически составляться заранее, либо, напр., вставляться с помощью известного CAD-файла (англ. Computer-Aided Design, поддерживаемое компьютером проектирование) здания. Для автоматического составления такой модели может использоваться кооперативная система роботов земля-воздух. При этом летательный аппарат может быть оснащен трехмерной лидарной системой. Эта трехмерная лидарная система применяется также для определения положения с помощью модели.
Дополнительную сенсорику представляют собой камеры глубины RGB-D (англ. Red-Green-Blue-Depth - глубина красного-зеленого-синего) и сенсоры скорости ветра. С помощью RGB-D камер возможна трехмерная регистрация непосредственной области чистящего приспособления. Благодаря этому может осуществляться автономная навигация чистящего приспособления даже при не совсем плоской очищаемой поверхности. Регистрация подлежащей чистке поверхности по отношению к топологии окрестностей позволяет также регистрировать флагштоки, скульптуры, выступы, подоконники, балконы и т.д., чтобы, с одной стороны, не сталкиваться с этими объектами, а с другой стороны, ориентироваться по этим стационарным объектам.
Измерение скорости ветра предпочтительно на чистящем устройстве важно именно на относительно больших высотах. При этом чистильщик имеет возможность незамедлительно реагировать на изменение скорости ветра на высоте чистящего приспособления.
Примеры осуществления изображены на чертежах и поясняются подробнее далее. Показано:
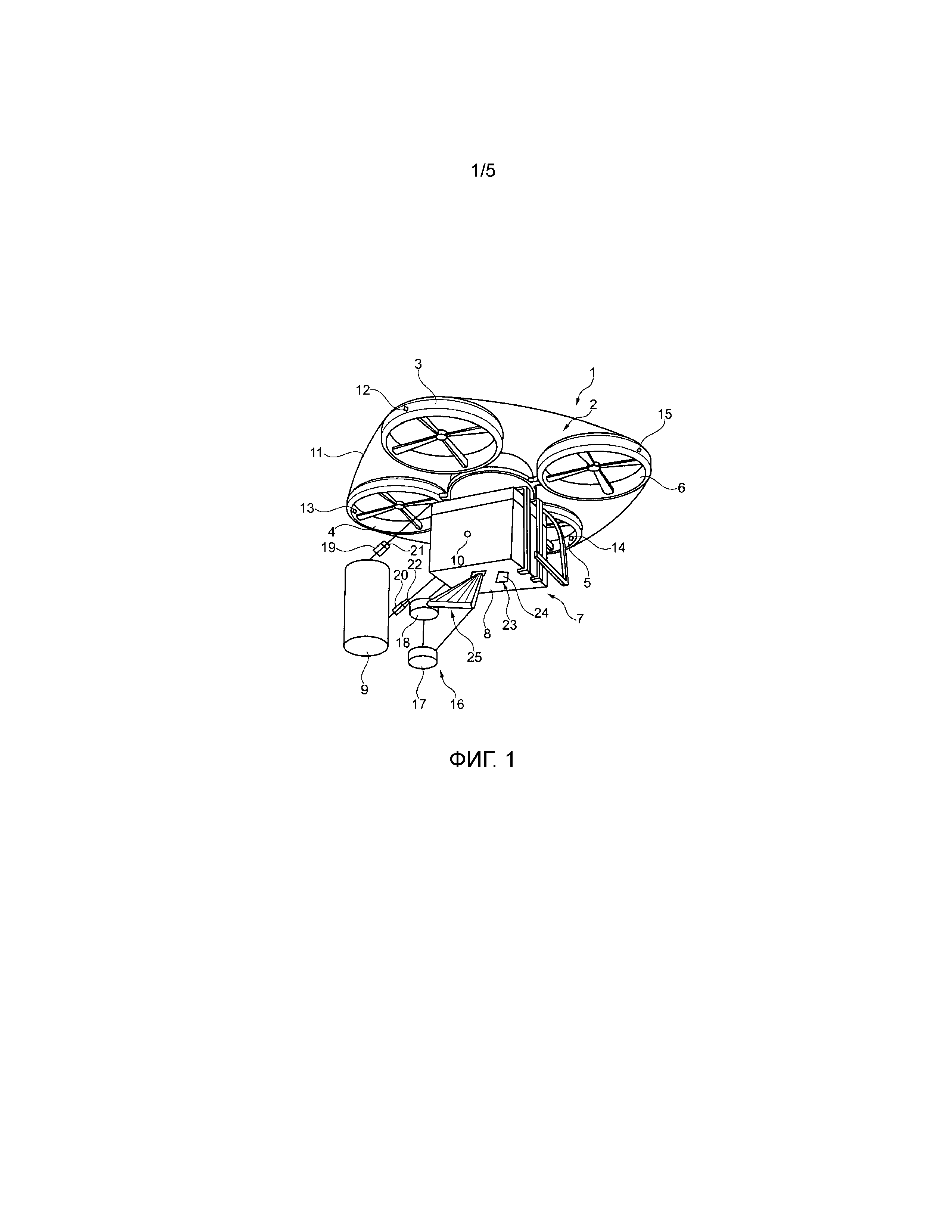
фиг.1: схематично конструкция чистящего устройства, имеющего четыре винта;
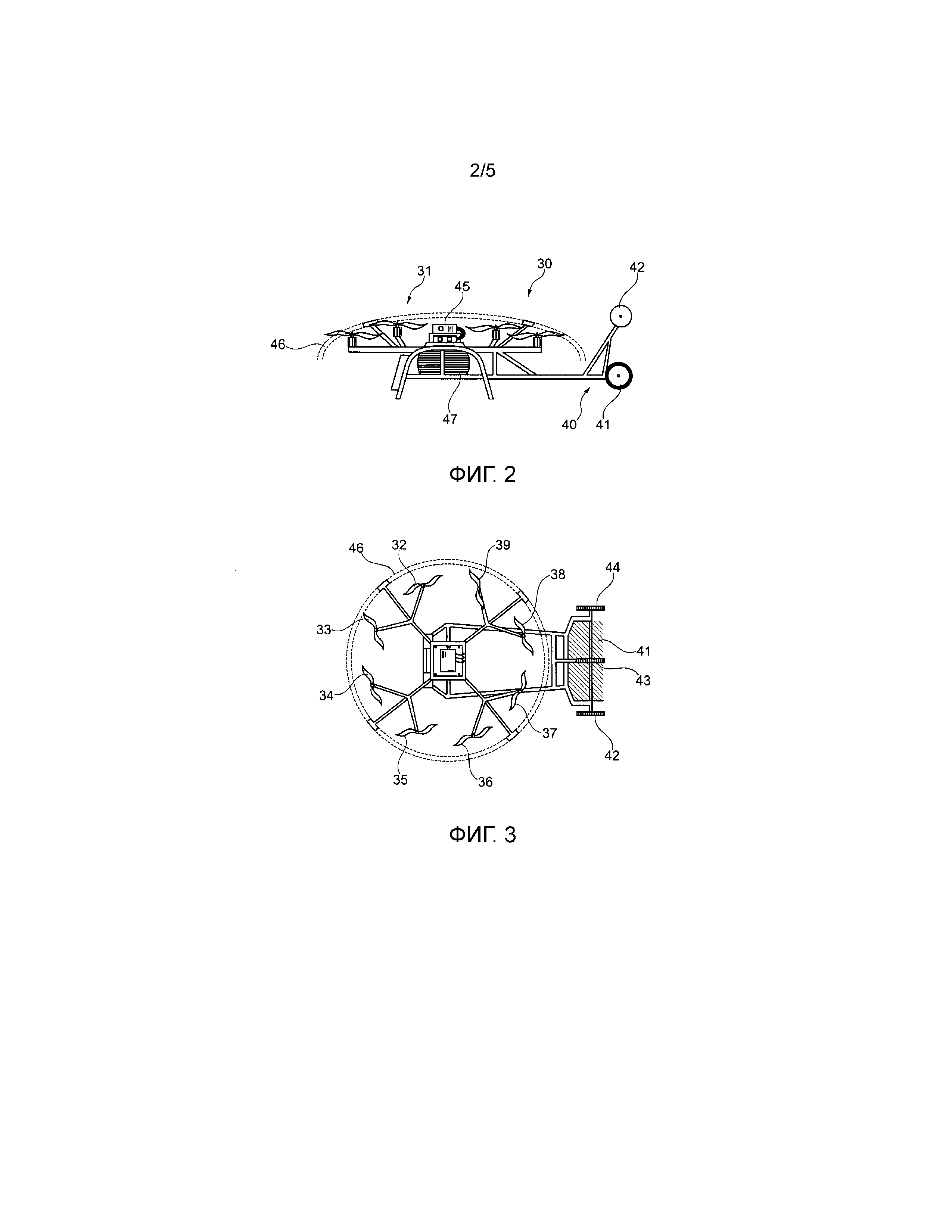
фиг.2: вид сбоку чистящего устройства, имеющего восемь винтов;
фиг.3: вид в плане чистящего устройства, показанного на фиг.2;
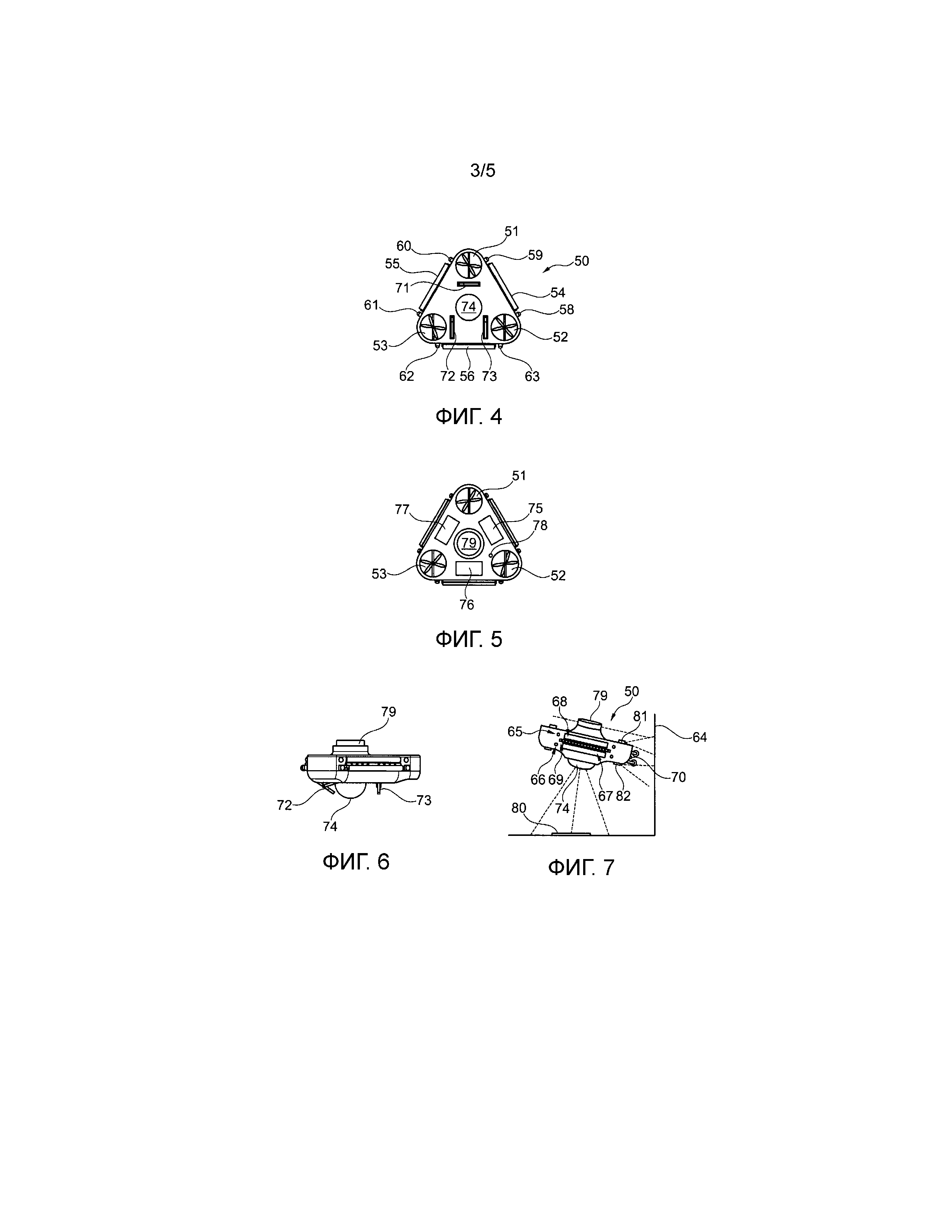
фиг.4: вид снизу чистящего приспособления, имеющего три винта;
фиг.5: вид сверху чистящего приспособления, показанного на фиг.4;
фиг.6: вид сбоку чистящего приспособления, показанного на фиг.4;
фиг.7: вид сбоку показанного на фиг.4 чистящего приспособления с маркерным настилом;
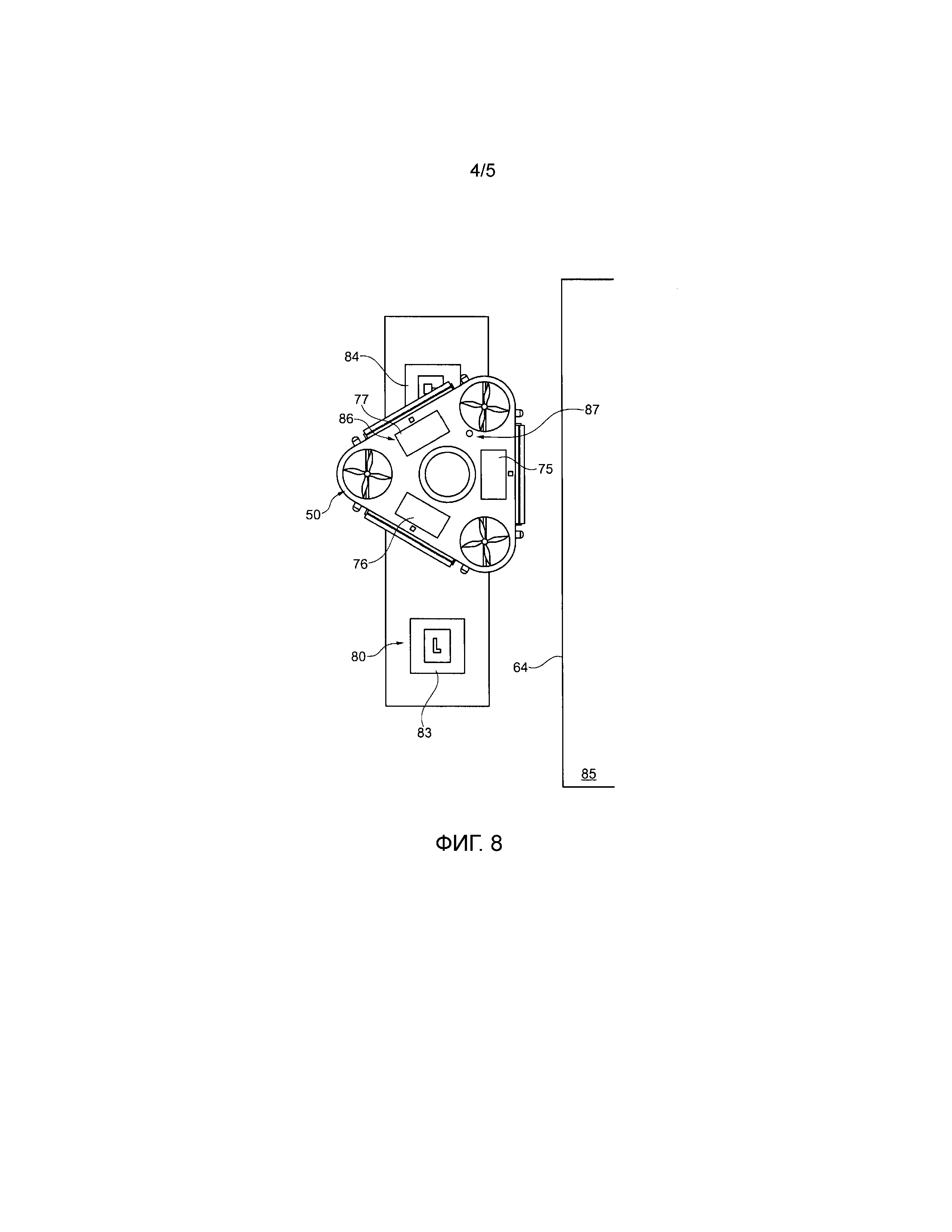
фиг.8: вид в плане в соответствии с фиг.7;
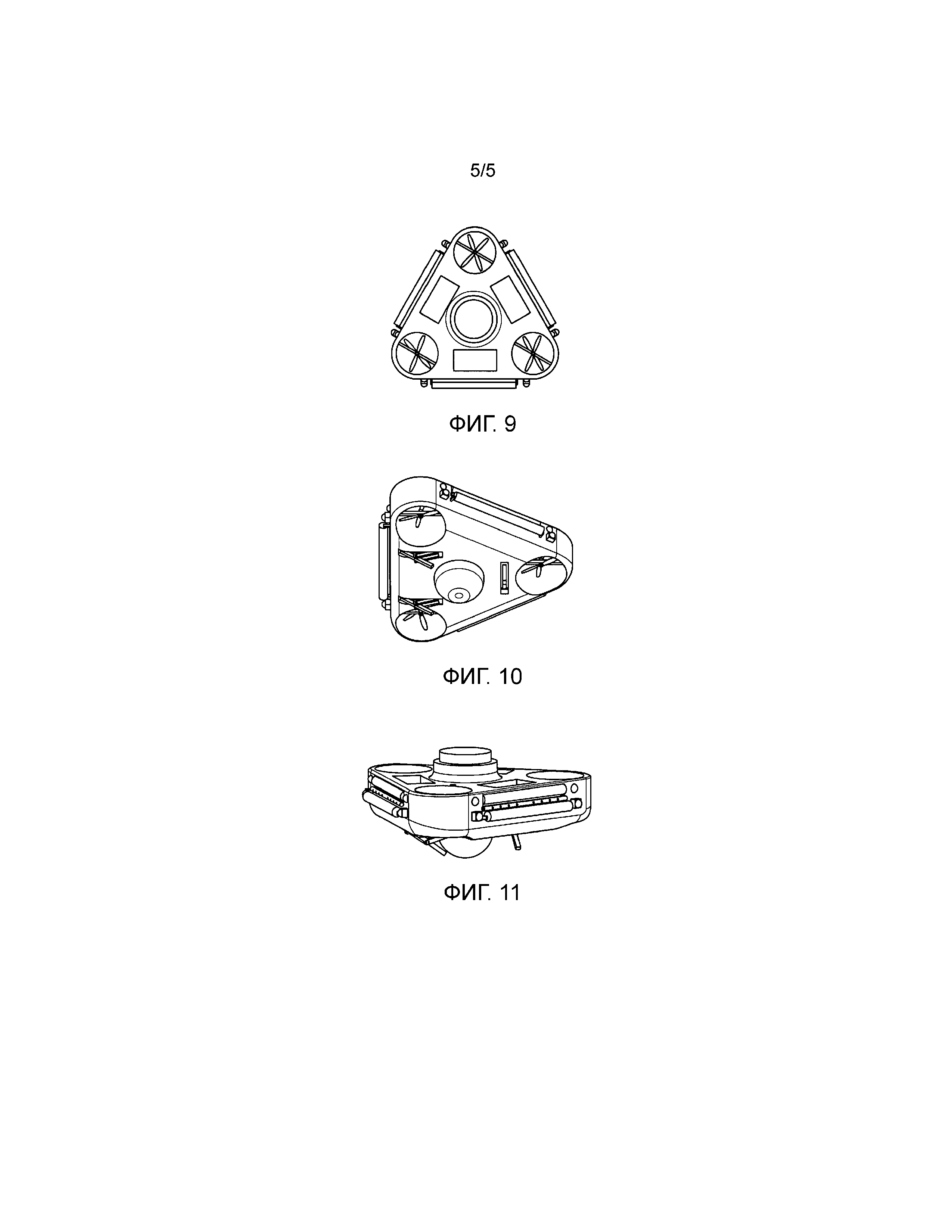
фиг.9: вид в плане в перспективе чистящего приспособления, показанного на фиг.4;
фиг.10: вид в перспективе нижней стороны чистящего приспособления, показанного на фиг.4, и
фиг.11: вид сбоку в перспективе чистящего приспособления, показанного на фиг.4.
Чистящее устройство 1 имеет летательный аппарат 2, имеющий винты 3, 4, 5, 6. На этом летательном аппарате 2 размещено чистящее приспособление 7 для очищения поверхности (не показано).
Чистящее приспособление 7 состоит из основной части 8, на которой размещены чистящие агрегаты, такие как, например, вращающаяся щетка 9. Вместо одной вращающейся щетки 9 вокруг основной части 8 могут быть также расположены несколько вращающихся щеток 9.
Помимо того, в основную часть 8 интегрирована камера 10. Вместо одной камеры 10 на летательном аппарате могут быть также расположены несколько камер или одна камера, имеющая несколько оптических приборов.
Во избежание столкновений с людьми и предметами на летательном аппарате 2 предусмотрена защитная рама 11 для защиты винтов 3, 4, 5 и 6.
Для измерения расстояния и/или обнаружения контакта на летательном аппарате 2 предусмотрены сенсоры 12-15, которые вместе образуют сенсорику.
Для соблюдения постоянного расстояния до подлежащей чистке поверхности предусмотрено передвигающееся на роликах устройство 16, которое расположено между основной частью 8 и подлежащей чистке поверхностью таким образом, что ролики 17, 18 обкатываются по подлежащим чистке поверхностям, в то время как чистящее устройство 7 движется относительно подлежащей чистке поверхности. На этой фигуре показаны только два ролика 17 и 18. Предпочтительно, когда по периметру летательного аппарата 2 расположены и другие ролики.
Щетки 9 чистящего приспособления 7 могут быть установлены подвижно относительно летательного аппарата 2. Для этого служат буферные элементы 19, 20, имеющие дальномеры 21, 22. Вместо дальномеров или дополнительно к дальномерам может быть также предусмотрено манометрическое устройство (не показано) для измерения давления, действующего на летательный аппарат 2 со стороны щеток 9 чистящего приспособления 7.
В основной части предусмотрена электроника 23, которая имеет также измерительные устройства 24 для управления положением летательного аппарата 2.
Форсунка 25 позволяет наносить чистящую среду, такую как, например, деионизованная вода или сухой лед, на подлежащую чистке поверхность, такую как, например, фасад.
Показанное на фиг.2 и 3 чистящее устройство 30 имеет летательный аппарат 31 и восемь винтов 32-39. На летательном аппарате 31 размещено чистящее приспособление 40, которое имеет вращающуюся щетку 41 и три колеса 42, 43 и 44 для соблюдения дистанции. На чистящем приспособлении расположена камера 45 и над винтами распространяется защитная рама 46, которая должна предотвращать столкновение винтов с человеком или подлежащей чистке поверхностью. Чистящее приспособление 31 имеет резервуар 47 для чистящего средства, в котором в качестве чистящей среды может транспортироваться деионизованная вода или сухой лед.
На фиг.4 показано чистящее устройство 50, имеющее три винта 51, 52 и 53. Между этими винтами с наружной стороны основной части 57 расположено по чистящей щетке 54, 55, 56. Сбоку от каждой из чистящих щеток предусмотрены тактильные сенсоры 58-63 для определения расстояния между основной частью 57 и подлежащей чистке поверхностью 64. Тактильные сенсоры могут быть выполнены каждый в виде пары 65, 66 сенсоров, как наглядно изображено на фиг.7. Чистящие щетки также выполнены предпочтительно в виде пары 67, 68 щеток. Это позволяет предусмотреть между щетками подвод 69, 70 воды, через который ионизированная вода может распыляться на подлежащую чистке поверхность 64.
На нижней стороне чистящего устройства 50 предусмотрен также складывающаяся посадочная опора, имеющая три посадочные ножки 71, 72 и 73, которые могут раскладываться по меньшей мере при процессе посадки. В середине основной части 57 предусмотрен сенсорный модуль 74, который имеет RGBD-камеру и одномерный лидар (1D-LIDAR).
На виде в плане видны противоположно вращающиеся винты 51, 52 и 53 и между ними по одной сменной системе 75, 76 и 77 батарей. Внутри основной части 57 находится бак для воды (не показан), который доступен через отверстие 78. На верхней стороне основной части 57 предусмотрен другой сенсорный модуль 79, который имеет RGBD-камеру и двухмерный лидар (2D-LIDAR).
С помощью сенсорного модуля 74 может определяться положение чистящего устройства 50 относительно маркерного настила 80, а ультразвуковые сенсоры 81, 82 позволяют устанавливать относительное положение чистящего устройства 60 по отношению к подлежащей чистке поверхности 64.
При подлете чистящего устройства 50 к подлежащей чистке поверхности 64 чистящее устройство слегка наклонено, чтобы двигаться с помощью винтов 51-53 в направлении подлежащей чистке поверхности 64. Как только щетки 67, 68 соприкасаются с подлежащей чистке поверхностью 64, наклонное положение устройства 50 определяет давления прижатия к подлежащей чистке поверхности 64. Чистящие щетки, как показано на фиг.7, оперты гибким образом, так что даже при наклонном положении чистящего устройства 50 относительно подлежащей чистке поверхности 64 две располагающиеся друг над другом щетки 67 и 68 могут прилегать к подлежащей чистке поверхности.
На фиг.8 можно видеть маркировочный настил 80 на виде в плане, так что видны также маркировки 83, 84. Подлежащая чистке поверхность 64 является частью здания 85, перед которым может раскладываться маркировочный настил 80. Вместо маркировочного настила для позиционирования чистящего устройства 50 могут также использоваться заметные имеющиеся маркировочные точки, например, в области земли или на здании 85. Маркировочный настил служит в настоящем случае также посадочной поверхностью, и у приземлившегося чистящего устройства 50 легко доступны сменные системы 57, 67 и 77 батарей на верхней стороне 86 чистящего устройства 50, как и отверстие 87 к баку с водой.
Реферат
Чистящее устройство (1) для очищения фасадов имеет летательный аппарат (2) с винтами (3, 4, 5, 6) и закрепленное на летательном аппарате (2) чистящее приспособление (7). Это чистящее приспособление (7) может простым образом чистить фасады механически щетками (9) или какой-либо чистящей средой, такой как, например, деионизованная вода или сухой лед. 3 н. и 11 з.п. ф-лы, 11 ил.
Комментарии