Роботизированная система чистки, базовая станция и способ ее управления - RU2777408C1
Код документа: RU2777408C1
Чертежи












































Описание
Роботизированная система чистки, базовая станция и способ ее управления
Область техники
Настоящее изобретение относится к роботизированной системе чистки, базовой станции и способу ее управления, в частности к роботизированной системе чистки, способной автоматически заменять блок для мытья полов, и соответствующей базовой станции и способу ее управления.
Уровень техники
С развитием науки и технологий роботы играют все более важную роль в жизни людей, особенно домашние роботы, которые помогают людям освободиться от тяжелой работы по дому. Среди них робот-уборщик пользуется большой популярностью у пользователей из-за его широкого применения.
Известен робот-уборщик, способный ходить автономно без прямого искусственного управления и манипуляции при выполнении работы, а также выполняющий функции планирования пути, автоматического обхода препятствий, взаимодействия человека с машиной, возврата для зарядки и так далее. Он может удовлетворить повседневные потребности людей в уборке мусора на полу, но известный робот-уборщик обычно не имеет функции мытья полов. Многие пользователи надеются, что робот-уборщик может мыть пол, помимо уборки мусора на полу, чтобы поддерживать пол в относительно чистом состоянии. Некоторые компании в стране и за рубежом также пытаются реализовать функцию мытья полов с помощью роботов-уборщиков. Например, компания irobot из США подала заявку на патент CN108378786A, в которой раскрыта чистящая подушка, предназначенная для мобильных роботов, которая может впитывать и поддерживать чистящую жидкость и подходит для использования в сочетании с более чем одним инструментом; компания Cobos Robot Company подала заявку на патент CN107788913A, в которой говорилось, что робот-уборщик полов с помощью тряпок определяет тип пола во время работы, чтобы избежать попадания ковров; и т.п. Так как тряпка во время работы легко пачкается, если ее вовремя не заменить, это не только сильно снизит эффект очистки, но даже сделает грязным изначально чистый пол. Существующий робот-уборщик не может автоматически вовремя заменить блок для мытья полов робота-уборщика. Заменяют блок для мытья полов обычно вручную. Пользователи должны постоянно уделять пристальное внимание процессу очистки, что приводит к низкому интеллектуальному уровню роботов. Если пользователи вовремя не заменят блок для мытья полов, они загрязнят очищенный пол. Эта проблема особенно очевидна для пользователей с большой внутренней площадью комнаты.
Поэтому для решения указанных технических проблем необходимо разработать новую техническую схему.
Сущность изобретения
Технической задачей настоящего изобретения является предоставление роботизированной системы чистки, способной автоматически заменять блок для мытья полов.
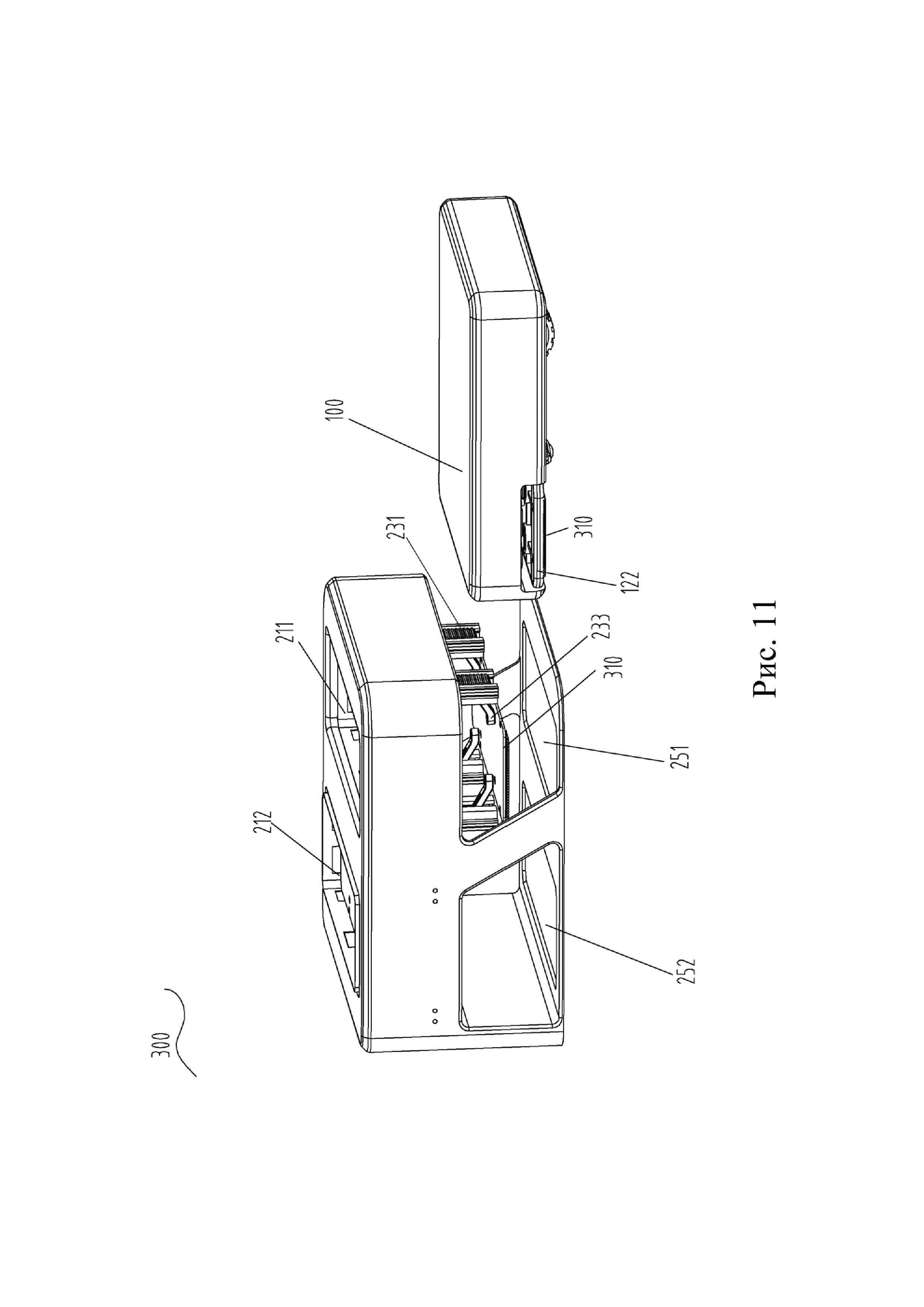
Для решения поставленной задачи настоящее изобретение представляет следующее техническое решение: роботизированная система чистки, включающая в себя: робот-уборщик, блок для мытья полов, съемным образом соединенный с роботом-уборщиком, и базовую станцию, предназначенную для парковки робота-уборщика; отличающаяся тем, что: в состав робота-уборщика входят: основной корпус; подвижный блок, расположенный на основном корпусе и приводящий робот-уборщик в движение по рабочей поверхности; компонент подключения, используемый для съемной установки блока для мытья полов на корпусе робота, а базовая станция включает в себя: блок хранения, предназначенный для хранения по крайней мере одного блока для мытья полов; рабочие позиции, сформированные на базовой станции и формирующие интервальное пространство с блоком хранения для парковки робота-уборщика, чтобы заменить блок для мытья полов; блок передачи, предназначенный для передачи блока для мытья полов между блоком хранения и рабочей позицией; роботизированная система чистки также включает в себя блок управления, который управляет компонентом подключения для установки и/или удаления соответствующего блока для мытья полов в рабочей позиции, чтобы робот заменил блок для мытья полов;
В одном варианте осуществления блок хранения расположен над рабочей позицией.
В одном варианте осуществления блок хранения включает в себя первый модуль хранения и второй модуль хранения, первый модуль хранения хранит блок для мытья полов, отсоединенный от робота-уборщика, а второй модуль хранения хранит блок для мытья полов, предназначенный для установки на роботе-уборщике.
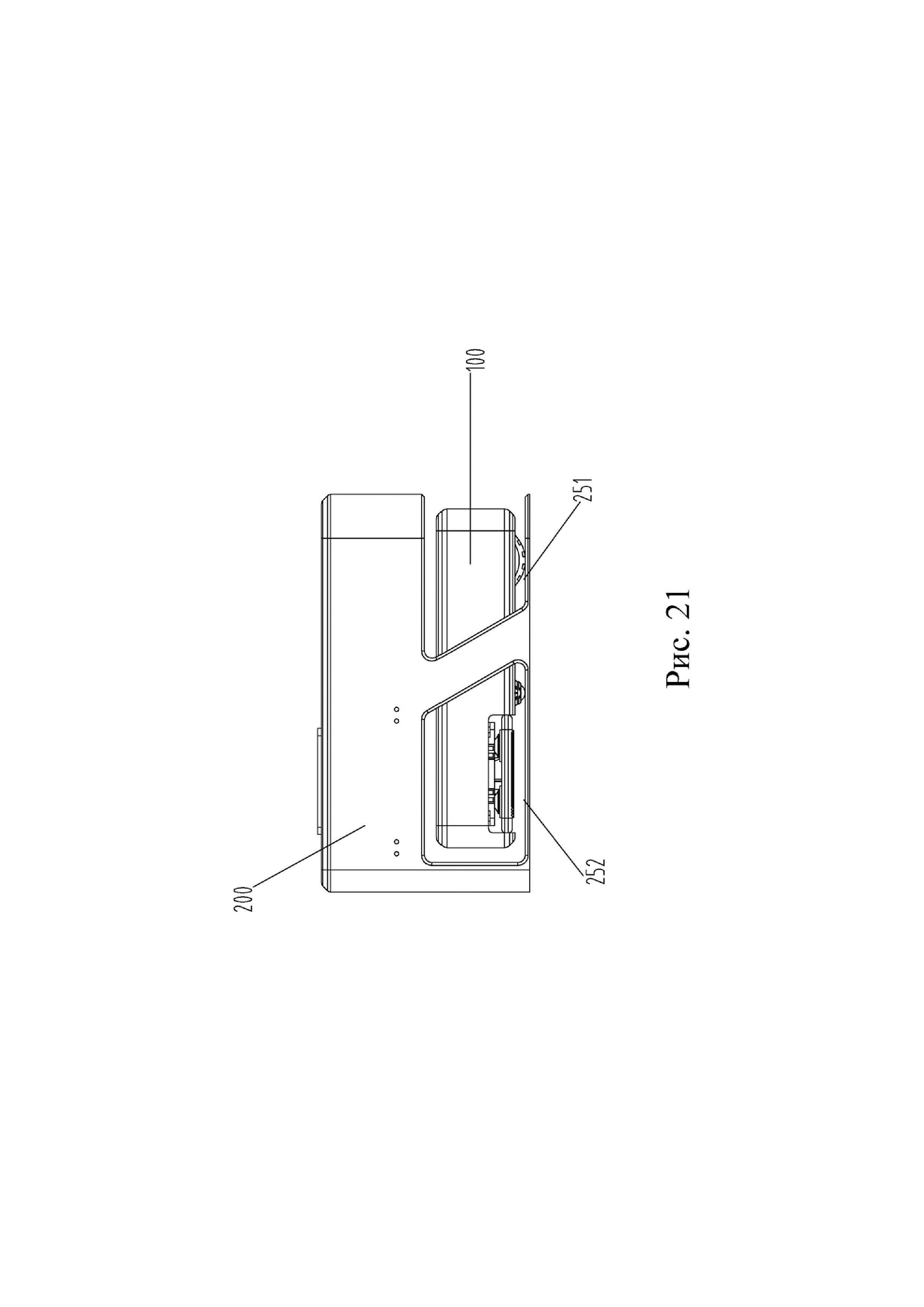
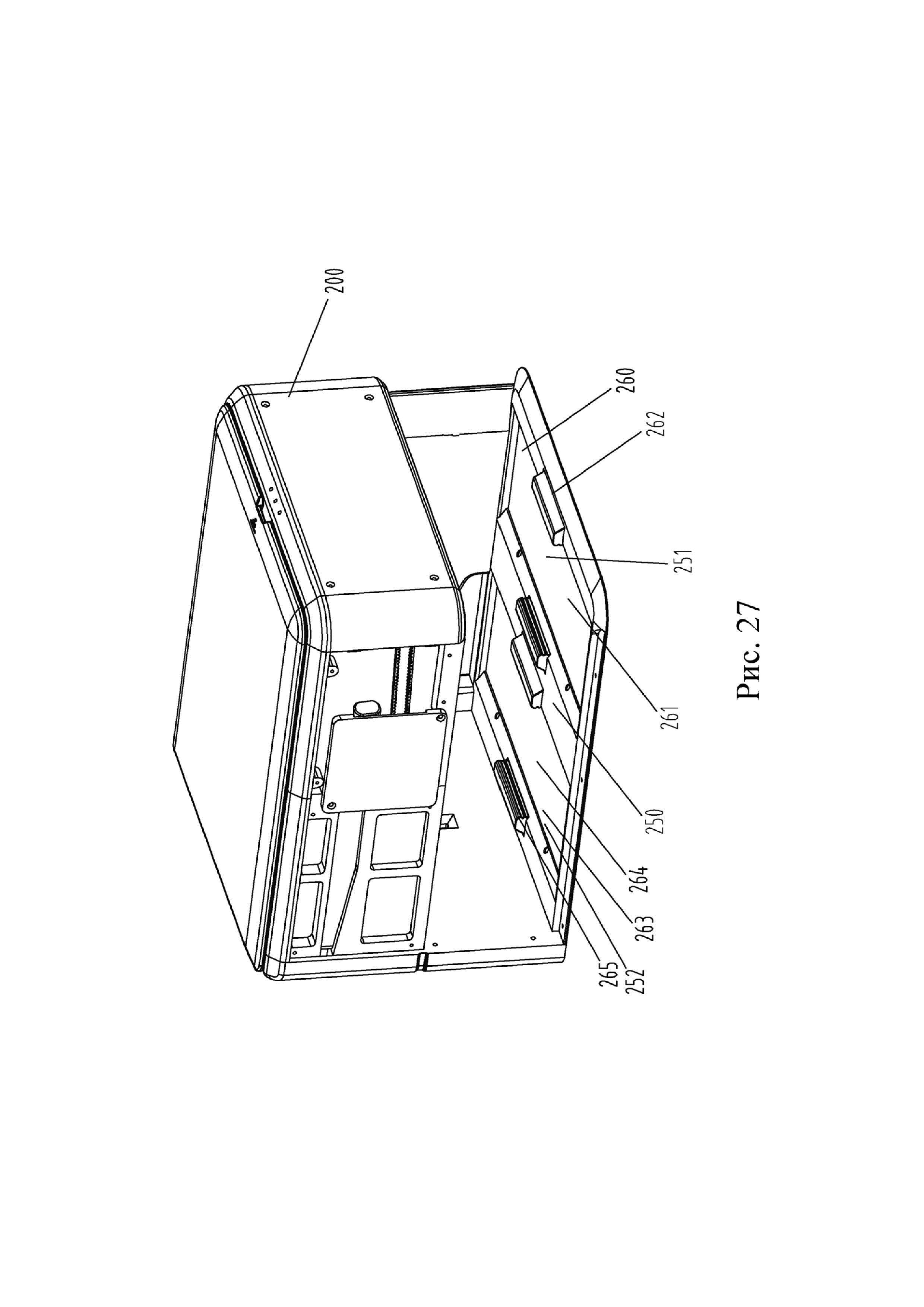
В одном варианте осуществления рабочие позиции включают в себя первую рабочую позицию для отсоединения блока для мытья полов от робота и вторую рабочую позицию для установки блока для мытья полов на роботе.
В одном варианте осуществления первый модуль хранения расположен над первой рабочей позицией, а второй модуль хранения расположен над второй рабочей позицией.
В одном варианте осуществления базовая станция включает в себя нижнюю пластину, на которой образуются рабочие позиции, при этом толщина нижней пластины составляет менее 20 мм.
В одном варианте осуществления блок передачи заставляет блок для мытья полов перемещаться по крайней мере частично в вертикальном направлении.
В одном варианте осуществления блок передачи включает в себя приводную часть и загрузочную часть; загрузочная часть соединена с блоком для мытья полов и приводит блок для мытья полов в перемещение под действием приводной части.
В одном варианте осуществления загрузочная часть включает в себя поддерживающий компонент, предназначенный для поддерживания блока для мытья полов в блоке хранения, и предотвращения его падения.
В одном варианте осуществления загрузочная часть включает в себя модуль сбора блоков для мытья полов и модуль подачи блоков для мытья полов, а модуль сбора блоков для мытья полов перемещает блок для мытья полов, отсоединенный от робота-уборщика, из первой рабочей позиции в первый модуль хранения, модуль подачи блоков для мытья полов получает блок для мытья полов из второго модуля хранения и перемещает его во вторую рабочую позицию для установки на роботе-уборщике.
В одном варианте осуществления поддерживающий компонент включает в себя первый поддерживающий компонент, предназначенный для поддерживания блока для мытья полов в первом модуле хранения, и второй поддерживающий компонент, предназначенный для поддерживания блока для мытья полов во втором модуле хранения.
В одном варианте модуль сбора блоков для мытья полов включает в себя подъемный механизм, перемещающийся в вертикальном направлении, причем подъемный механизм включает в себя узел подборки, с помощью которого подъемный механизм поднимает блок для мытья полов из первой рабочей позиции и перемещает его в первый модуль хранения.
В одном варианте осуществления модуль сбора блоков для мытья полов включает в себя поворотную конструкцию, вращающуюся по крайней мере частично в вертикальной плоскости и способную заставить блок для мытья полов вращаться по крайней мере частично в вертикальной плоскости, перемещая при этом блок для мытья полов из первой рабочей позиции в первый модуль хранения.
В одном варианте осуществления блок передачи заставляет блок для мытья полов двигаться по направлению, примерно перпендикулярному направлению входа робота на станцию.
В одном варианте осуществления модуль сбора блоков для мытья полов передает блок для мытья полов в первый модуль хранения, поднимая блок для мытья полов.
В одном варианте осуществления подъемный механизм включает в себя телескопическую двухступенчатую подвижную конструкцию.
В одном варианте осуществления узел подборки включает в себя адсорбционный блок для адсорбции блока для мытья полов.
В одном варианте осуществления адсорбционный блок включает в себя магнитный элемент.
В одном варианте осуществления модуль сбора блоков для мытья полов включает в себя первую подъемную раму блока для мытья полов, поднимающуюся под действием приводной части, таким образом неся блок для мытья полов и перемещая его из первой рабочей позиции в первый модуль хранения.
В одном варианте осуществления, когда первая подъемная рама блока для мытья полов поднимается, переносимый ею блок для мытья полов может проходить через первый поддерживающий компонент; а когда первая подъемная рама блока для мытья полов опускается, первый поддерживающий компонент может поддерживать данный блок для мытья полов, чтобы он не опускался вслед за первой подъемной рамой блока для мытья полов.
В одном варианте осуществления первый поддерживающий компонент включает в себя ограничительную деталь, способную вращаться; деталь сброса, приводящую ограничительную деталь в исходное состояние, ограничительная деталь имеет по крайней мере два состояния, блок для мытья полов проходит через первый поддерживающий компонент, когда ограничительная деталь находится в первом состоянии, а блок для мытья полов поддерживается, когда ограничительная деталь находится во втором состоянии.
В одном варианте осуществления ограничительная деталь вращается в вертикальной плоскости.
В одном варианте осуществления деталь сброса представляет собой пружину кручения или пружину.
В одном варианте осуществления модуль подачи блоков для мытья полов включает в себя вторую подъемную раму блока для мытья полов, которая может опускаться вниз под действием приводной части, тем самым неся блок для мытья полов и перемещая его из второго модуля хранения во вторую рабочую позицию.
В одном варианте осуществления, когда опускается вторая подъемная рама блока для мытья полов, она может привести к опусканию по крайней мере один блок для мытья полов из второго модуля хранения, а второй поддерживающий компонент может поддерживать блок для мытья полов во втором модуле хранения и опускать по крайней мере один блок для мытья полов из второго модуля хранения на вторую подъемную раму блока для мытья полов.
В одном варианте осуществления второй поддерживающий компонент включает в себя зажимной соединитель и смещающий элемент, причем зажимной соединитель имеет первое положение, где он находится под давлением смещающего элемента, и второе положение, где он находится, преодолев давление смещающего элемента, а когда зажимной соединитель находится в первом положении, вторая подъемная рама блока для мытья полов при спуске может опускать по крайней мере один блок для мытья полов из второго модуля хранения на вторую подъемную раму блока для мытья полов; а когда зажимной соединитель находится во втором положении, зажимной соединитель может поддерживать блок для мытья полов во втором модуле хранения.
В одном варианте осуществления зажимной соединитель вращается в горизонтальном направлении.
В одном варианте осуществления второй поддерживающий компонент дополнительно включает в себя: направляющий элемент, расположенный на второй подъемной раме блока для мытья полов и имеющий направляющую поверхность, когда вторая подъемная рама блока для мытья полов перемещается в вертикальном направлении, направляющая поверхность упирается в смещающий элемент, чтобы зажимной соединитель вращался, поддерживая/высвобождая блок для мытья полов во втором модуле хранения.
В одном варианте осуществления первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов движутся синхронно в вертикальном направлении.
В одном варианте осуществления когда первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов перемещаются в вертикальном направлении, нет никакого относительного движения между первой подъемной рамой блока для мытья полов и второй подъемной рамой блока для мытья полов.
В одном варианте осуществления первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов движутся синхронно.
В одном варианте осуществления блок передачи включает в себя по крайней мере одну направляющую штангу, а первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов расположены на штанге и могут скользить по направляющей штанге, осуществляя при этом подъем и спуск.
В одном варианте осуществления на первой подъемной раме блока для мытья полов выполнено первое отверстие, на второй подъемной раме блока для мытья полов выполнено второе отверстие, приводная часть включает в себя: вращающуюся часть, один конец которой встроен в первое отверстие и может скользить в нем, а другой конец вращающейся части встроен во второе отверстие и может скользить в нем; двигатель; двигатель используется для приведения в движение вращающейся части, чтобы вращающаяся часть вращалась вокруг точки между двумя концами.
В одном варианте осуществления приводная часть включает в себя: вращающийся ремень, простирающийся в вертикальном направлении; двигатель, приводящий в движение вращающийся ремень, первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов соединены с вращающимся ремнем, так что вращающийся ремень может приводить в подъем и спуск первую подъемную раму блока для мытья полов и вторую подъемную раму блока для мытья полов.
В одном варианте осуществления вращающийся ремень, простирающийся в вертикальном направлении, расположен между первой подъемной рамой блока для мытья полов и второй подъемной рамой блока для мытья полов, а двигатель расположен на дальнем конце вращающегося ремня, простирающегося в вертикальном направлении, напротив нижней пластины базовой станции.
В одном варианте осуществления приводная часть дополнительно включает в себя: вращающийся ремень, простирающийся в поперечном направлении и соединенный с вращающимся ремнем, простирающимся в вертикальном направлении, а электродвигатель расположен на дальнем конце вращающегося ремня, простирающегося в поперечном направлении, вдали от блока хранения.
В одном варианте осуществления модуль подачи блоков для мытья полов способен достичь первого состояния для фиксации блока для мытья полов и второго состояния для высвобождения блока для мытья полов и передать по крайней мере один блок для мытья полов из второго модуля хранения во вторую рабочую позицию при высвобождении блока для мытья полов.
В одном варианте осуществления модуль подачи блоков для мытья полов включает в себя слайдер, и механизм передачи, приводящий в движение слайдер, чтобы слайдер перемещался между первым положением для фиксации блока для мытья полов и вторым положением для высвобождения блока для мытья полов.
В одном варианте осуществления слайдер включает в себя выступающую конструкцию, и выступ фиксирует блок для мытья полов, когда слайдер находится в первом положении.
В одном варианте осуществления модуль подачи блоков для мытья полов включает в себя более двух слайдеров.
В одном варианте осуществления второй поддерживающий компонент включает в себя: первый поддерживающий механизм и второй поддерживающий механизм, которые расположены наверху и внизу соответственно и поочередно поддерживают блок для мытья полов во втором модуле хранения, чтобы по крайней мере один блок для мытья полов из второго модуля хранения перемещался во вторую рабочую позицию.
В одном варианте осуществления второй поддерживающий механизм включает в себя множество буферных частей, которые образуют ступенчатую буферную структуру.
В одном варианте осуществления второй поддерживающий компонент дополнительно включает в себя: направляющий элемент, расположенный на второй подъемной раме блока для мытья полов и имеющий направляющую поверхность, когда вторая подъемная рама блока для мытья полов опускается, направляющая поверхность упирается в один конец зажимного соединителя, чтобы зажимной соединитель вращался, отделяя зажимной соединитель от второго блока для мытья полов.
В одном варианте осуществления, когда вторая подъемная рама блока для мытья полов опускается и после отсоединения одного конца зажимного соединителя от направляющей поверхности, зажимной соединитель вращается под действием смещающего элемента, чтобы другой конец зажимного соединителя приближался к блоку для мытья полов во втором модуле хранения, поддерживая блок для мытья полов во втором модуле хранения.
В одном варианте осуществления смещающий элемент представляет собой пружину кручения или пружину, установленную на зажимной соединитель; в состав базовой станции робота-уборщика также входит: неподвижная рама, на которой установлены зажимной соединитель и смещающий элемент.
В одном варианте осуществления существует заранее установленный угол между направляющей поверхностью и вертикальным направлением, который больше 0 градусов но меньше 90 градусов.
В одном варианте осуществления существуют множество зажимных соединителей и смещающих элементов, и множество зажимных соединителей могут поддерживать различные положения по краям блока для мытья полов.
Система робота-уборщика, включающая в себя: базовую станцию робота-уборщика, как описано выше; робот-уборщик, на котором могут быть установлены чистящие элементы, робот-уборщик может отделять и/или устанавливать чистящие элементы на базовой станции робота-уборщика, причем чистящие элементы представляют собой блок для мытья полов.
В одном варианте осуществления рабочая позиция снабжена упорной конструкцией для остановки блока для мытья полов, отсоединенного от робота-уборщика, и/или блока для мытья полов, предназначенного для установки на роботе-уборщике.
В одном варианте осуществления упорная конструкция включает в себя паз и/или перегородку для хранения блоков для мытья полов.
В одном варианте осуществления первая рабочая позиция снабжена первой упорной конструкцией и/или вторая рабочая позиция снабжена второй упорной конструкцией, при этом первая упорная конструкция используется для остановки блока для мытья полов, отсоединенного от робота-уборщика, и/или вторая упорная конструкция используется для остановки блока для мытья полов, предназначенного для установки на роботе.
В одном варианте осуществления первая упорная конструкция включает в себя первый паз для хранения блока для мытья полов, отсоединенного от робота-уборщика, и/или вторая упорная конструкция включает в себя второй паз для хранения блока для мытья полов, предназначенного для установки на роботе.
В одном варианте осуществления край боковой стенки первого паза и/или второго паза снабжен перегородкой для блокирования отсоединения блока для мытья полов, отсоединенного от робота-уборщика, и/или отсоединения блока для мытья полов, предназначенного для установки на роботе, от первого паза и/или второго паза.
В одном варианте осуществления робот-уборщик возвращается на базовую станцию после обнаружения инструкции замены, указывающей на то, что робот-уборщик должен возвращаться на базовую станцию для замены блока для мытья полов.
В одном варианте осуществления робот-уборщик включает в себя датчик распознавания степени загрязнения блока для мытья полов, когда определяется, что степень загрязнения блока для мытья полов, установленного на роботе в настоящий момент, достигла порогового значения, и/или когда робот-уборщик обнаруживает, что удовлетворяется по крайней мере одно из заданных условий по рабочей площади, рабочему времени и графику работы, формируется инструкция о замене.
В одном варианте осуществления базовая станция и робот-уборщик соответственно снабжены блоками связи, когда роботу-уборщику необходимо вернуться на базовую станцию и заменить блок для мытья полов, робот-уборщик и базовая станция осуществляют коммуникацию через блоки связи, чтобы модуль подачи блоков для мытья полов переместил, по крайней мере, один блок для мытья полов во вторую рабочую позицию до входа робота-уборщика на базовую станцию.
В одном варианте осуществления робот-уборщик включает в себя датчик определения положения, когда обнаруживается, что робот-уборщик достиг первой рабочей позиции, робот-уборщик под контролем отделяет блок для мытья полов; а когда обнаруживается, что робот-уборщик достиг второй рабочей позиции, робот-уборщик под контролем устанавливает блок для мытья полов.
В одном варианте осуществления блок хранения расположен с возможностью отсоединения относительно базовой станции.
В одном варианте осуществления базовая станция включает в себя блок зарядки, который заряжает робот-уборщик, когда он стыкован с базовой станцией.
В одном варианте осуществления робот-уборщик является бытовым и/или домашним сервисным роботом.
Способ управления роботизированной системой чистки, при этом роботизированная система чистки включает в себя: робот-уборщик, блок для мытья полов, съемным образом соединенный с роботом-уборщиком, и базовую станцию, предназначенную для парковки робота-уборщика, причем робот-уборщик включает в себя: основной корпус; подвижный блок, расположенный на основном корпусе и приводящий робот-уборщик в движение по рабочей поверхности; компонент подключения, используемый для съемной установки блока для мытья полов на корпусе робота; причем базовая станция включает в себя: блок хранения, предназначенный для хранения по крайней мере одного блока для мытья полов; рабочие позиции, сформированные на базовой станции и формирующие интервальное пространство с блоком хранения для парковки робота-уборщика, чтобы заменить блок для мытья полов, при этом рабочие позиции включают в себя первую рабочую позицию для отсоединения блока для мытья полов от робота и вторую рабочую позицию для установки блока для мытья полов на роботе; блок передачи, предназначенный для передачи блока для мытья полов между блоком хранения и рабочей позицией; роботизированная система чистки также включает в себя: блок управления, который управляет компонентом подключения для установки и/или удаления соответствующего блока для мытья полов в рабочей позиции, чтобы робот заменил блок для мытья полов; отличающийся тем, что способ включает следующие этапы: когда робот-уборщик достигает первой рабочей позиции, блок управления управляет компонентом подключения, чтобы отделить блок для мытья полов от робота-уборщика, а когда робот-уборщик достигает второй рабочей позиции, блок управления управляет компонентом подключения, чтобы установить блок для мытья полов.
В одном варианте осуществления перед тем, как робот-уборщик достигнет второй рабочей позиции, блок передачи передает блок для мытья полов, хранящийся в блоке хранения, в робот-уборщик для установки.
В одном варианте осуществления после отсоединения блока для мытья полов робот-уборщик продолжает движение до тех пор, пока не достигнет второй рабочей позиции, при этом блок управления управляет компонентом подключения для установки блока для мытья полов, а после завершения установки робот-уборщик отходит от базовой станции; или после отсоединения блока для мытья полов, робот-уборщик отходит от базовой станции и затем переходит во вторую рабочую позицию, при этом блок управления управляет компонентом подключения для установки блока для мытья полов.
В одном варианте осуществления после отхода робота-уборщика от базовой станции блок передачи извлекает блок для мытья полов, отсоединенный от робота-уборщика, и помещает его в блок хранения.
Базовая станция робота-уборщика, предназначенная для парковки робота-уборщика, съемным образом соединенного с блоком для мытья полов робота-уборщика, отличающаяся тем, что: базовая станция включает в себя: блок хранения, предназначенный для хранения по крайней мере одного блока для мытья полов; рабочие позиции, сформированные на базовой станции и формирующие интервальное пространство с блоком хранения для парковки робота-уборщика, чтобы заменить блок для мытья полов; блок передачи, предназначенный для передачи блока для мытья полов между блоком хранения и рабочей позицией.
В одном варианте осуществления блок хранения расположен над рабочей позицией.
В одном варианте осуществления блок хранения включает в себя первый модуль хранения и второй модуль хранения, первый модуль хранения хранит блок для мытья полов, отсоединенный от робота-уборщика, а второй модуль хранения хранит блок для мытья полов, предназначенный для установки на роботе-уборщике
В одном варианте осуществления рабочие позиции включают в себя первую рабочую позицию для отсоединения блока для мытья полов от робота и вторую рабочую позицию для установки блока для мытья полов на роботе.
В одном варианте осуществления первый модуль хранения расположен над первой рабочей позицией, а второй модуль хранения расположен над второй рабочей позицией.
В одном варианте осуществления первый модуль хранения и второй модуль хранения расположены рядом в направлении, параллельном рабочей поверхности.
В одном варианте осуществления днища первого модуля хранения и второго модуля хранения расположены примерно в одной плоскости.
В одном варианте осуществления второй модуль хранения установлен перед первым модулем хранения относительно входящего направления робота-уборщика.
В одном варианте осуществления вторая рабочая позиция расположена перед первой рабочей позицией относительно входящего направления робота-уборщика.
В одном варианте осуществления базовая станция включает в себя нижнюю пластину, на которой образуются рабочие позиции, при этом толщина нижней пластины составляет менее 20 мм.
В одном варианте осуществления блок передачи включает в себя приводную часть и загрузочную часть; загрузочная часть соединена с блоком для мытья полов и приводит блок для мытья полов в перемещение под действием приводной части.
В одном варианте осуществления загрузочная часть включает в себя поддерживающий компонент, предназначенный для поддерживания блока для мытья полов в блоке хранения, и предотвращения его падения.
В одном варианте осуществления загрузочная часть включает в себя модуль сбора блоков для мытья полов и модуль подачи блоков для мытья полов, а модуль сбора блоков для мытья полов перемещает блок для мытья полов, отсоединенный от робота-уборщика, из первой рабочей позиции в первый модуль хранения; модуль подачи блоков для мытья полов получает блок для мытья полов из второго модуля хранения и перемещает его во вторую рабочую позицию для установки на роботе-уборщике.
В одном варианте осуществления базовая станция дополнительно включает в себя блок зарядки для обеспечения энергией робота, когда он стыкован с базовой станцией.
В одном варианте осуществления когда робот-уборщик доходит до рабочей позиции базовой станции высота от вершины робота-уборщика до днища блока хранения в вертикальном направлении менее или равно 50 мм.
В одном варианте осуществления базовая станция снабжена вспомогательными направляющими структурами по обе стороны от входящего направления робота, используемыми для направления робота в рабочую позицию.
В одном варианте осуществления вспомогательная направляющая конструкция представляет собой вспомогательное направляющее колесо.
В одном варианте осуществления высота вспомогательной направляющей конструкции равна 1/3-1/2 высоты робота-уборщика.
В одном варианте осуществления базовая станция включает в себя нижнюю пластину, принимающую робот, а базовая станция включает в себя опорную часть, соединяющую нижнюю пластину базовой станции и блок хранения.
В одном варианте осуществления опорная часть расположена на стороне базовой станции, так что проекции корпуса и блока хранения в горизонтальной плоскости примерно совпадают, когда робот-уборщик паркован.
Приведенная выше техническая схема изобретения имеет следующие очевидные положительные эффекты:
Когда блок для мытья полов, используемый роботом-уборщиком, достигает определенного уровня или определенного времени и нуждается в замене, робот отправляется на базовую станцию робота-уборщика. В это время внизу находится первая подъемная рама блока для мытья полов, робот переходит на базовую станцию и достигает рабочей позиции, блок для мытья полов робота выравнивается с первой подъемной рамой блока для мытья полов, а затем блок для мытья полов отсоединяется от робота, и отсоединенный блок для мытья полов опускается на первую подъемную раму блока для мытья полов. Под действием приводной части первая подъемная рама блока для мытья полов поднимается, поддерживая блок для мытья полов и поднимая его вверх до первого поддерживающего компонента, который поддерживает данный блок для мытья полов, чтобы он не опускался вместе с первой подъемной рамой блока для мытья полов. Первая подъемная рама блока для мытья полов может опуститься под действием приводной части, чтобы подготовиться к следующему прибытию робота. Множество вторых блоков для мытья полов для замены заранее уложено на второй поддерживающий компонент. Когда вторая подъемная рама блока для мытья полов опускается, по крайней мере один блок для мытья полов опускается из второго поддерживающего компонента на вторую подъемную раму блока для мытья полов. Когда вторая подъемная рама блока для мытья полов продолжает опускаться, вторая подъемная рама блока для мытья полов и по крайней мере один опустившийся на нее блок для мытья полов опускаются до дна. В это время робот может перемещаться выше второй подъемной рамы блока для мытья полов и автоматически устанавливать блок для мытья полов, находящийся на второй подъемной раме блока для мытья полов, на дно робота. Автоматическая замена блока для мытья полов, используемого роботом-уборщиком, осуществляется в соответствии с описанным выше процессом. Когда только что установленный блок для мытья полов станет грязным, можно повторять вышеуказанные шаги. Первый поддерживающий компонент может поддерживать множество блоков для мытья полов.
В одном варианте осуществления второй поддерживающий компонент включает в себя: первый поддерживающий механизм, имеющий поддерживающее состояние, при котором поддерживает блок для мытья полов, и сложенное состояние, при котором не поддерживает блок для мытья полов; второй поддерживающий механизм, имеющий опорное состояние, при котором поддерживает блок для мытья полов во втором модуле хранения, и открытое состояние, при котором высвобождает по крайней мере один блок для мытья полов в рабочую позицию; когда второй поддерживающий механизм находится в опорном состоянии, первый поддерживающий механизм находится в сложенном состоянии; когда второй поддерживающий механизм находится в открытом состоянии, первый поддерживающий механизм находится в поддерживающем состоянии, чтобы поддерживать блок для мытья полов во втором модуле хранения.
В одном варианте осуществления второй поддерживающий механизм срабатывается совместно с первым поддерживающим механизмом.
В одном варианте осуществления первый поддерживающий механизм может вращаться вокруг первой оси вращения; первый поддерживающий механизм переключается между поддерживающим состоянием и сложенным состоянием путем вращения; второй поддерживающий механизм может вращаться вокруг второй ось вращения; второй поддерживающий механизм переключается между опорным состоянием и открытым состоянием путем вращения; первая ось вращения параллельна второй оси вращения.
В одном варианте осуществления когда второй поддерживающий механизм вращается вокруг второй оси вращения, он приводит первый поддерживающий механизм во вращение вокруг первой оси вращения.
В одном варианте осуществления по крайней мере два вторых поддерживающих компонента соответственно установлены с обеих сторон блока хранения по первому направлению; первое направление перпендикулярно вертикальному направлению.
В одном варианте осуществления вторые поддерживающие компоненты, расположенные по обеим сторонам блока хранения, смещены друг от друга.
В одном варианте осуществления количество вторых поддерживающих компонентов больше трех.
В одном варианте осуществления второй поддерживающий механизм включает опорную пластину; один конец опорной пластины представляет собой соединительный конец для соединения с поворотным валом, а другой конец – свободный конец; поворотный вал приводит во вращение опорную пластину вокруг первой оси вращения; первый поддерживающий механизм включает в себя поворотную перегородку, которая вращается вокруг второй ось вращения; на поворотной перегородке установлен опорный стержень; опорный стержень находится вне блока хранения при сложенном состоянии и входит в блок хранения при поддерживающем состоянии.
В одном варианте осуществления при сложенном состоянии внешний конец опорного стержня расположен над самым нижним блоком для мытья полов в блоке хранения.
В одном варианте осуществления между краями двух соседних уложенных стопкой блоков для мытья полов предусмотрен промежуточный зазор; при опорном состоянии внешние концы опорных стержней противоположны промежуточным зазорам вдоль первого направления.
В одном варианте осуществления поворотная перегородка также снабжена рычагом переключения; поворотная перегородка расположена на стороне опорной пластины вдоль осевого направления первой оси вращения; на боковой поверхности соединительного конца опорной пластины предусмотрены первый ограничительный выступ и второй ограничительный выступ; рычаг переключения расположен между первым ограничительным выступом и вторым ограничительным выступом и ограничен во вращении первым ограничительным выступом и вторым ограничительным выступом.
В одном варианте осуществления опорная пластина дополнительно снабжена буферной частью; буферная часть включает в себя буферную наклонную плоскость; высота выступа буферной наклонной плоскости постепенно увеличивается в направлении от соединительного конца к свободному концу.
В одном варианте осуществления буферная часть также имеет скользящую наклонную плоскость; по сравнению с буферной наклонной плоскостью скользящая наклонная плоскость находится ближе к соединительному концу; в направлении от соединительного конца к свободному концу высота выступа скользящей наклонной плоскости постепенно уменьшается.
В одном варианте осуществления опорная пластина имеет множество буферных частей; множество буферных частей расположены вдоль направления от соединительного конца к свободному концу, формируя ступенчатую буферную структуру.
В одном варианте осуществления опорная пластина также имеет принимающую изогнутую поверхность на стороне ступенчатой буферной структуры вдали от свободного конца; когда опорная пластина поворачивается не более чем на 30 градусов из опорного состояния в открытое состояние, принимающая изогнутая поверхность непрерывно поддерживает блок для мытья полов.
В одном варианте осуществления длина опорной пластины, находящейся в блоке хранения при опорном состоянии, больше 1/2 от ширины блока хранения по первому направлению.
В одном варианте осуществления длина опорного стержня, находящегося в блоке хранения при поддерживающем состоянии, меньше, чем длина опорной пластины, находящейся в блоке хранения при опорном состоянии.
В одном варианте осуществления ширина опорного стержня постепенно уменьшается по мере его продвижения к своему внешнему концу; направление ширины опорного стержня приблизительно параллельно периферии вокруг второй оси вращения.
В одном варианте осуществления оболочка дополнительно снабжена приводным двигателем, первым приводным валом и вторым приводным валом; первый приводной вал и второй приводной вал расположены по обеим сторонам блока хранения по первому направлению; первый приводной вал и второй приводной вал расположены параллельно первой оси вращения и соответственно приводят во вращение поворотные валы, расположенные по обеим сторонам блока хранения; приводной двигатель приводит во вращение первый приводной вал и второй приводной вал.
В одном варианте осуществления приводной двигатель и первый приводной вал расположены на одной стороне блока хранения по первому направлению, а второй приводной вал расположен на другой стороне блока хранения по первому направлению; с одной стороны блока хранения по второму направлению предусмотрена цепочка; приводной двигатель через цепочку приводит в движение второй приводной вал.
В одном варианте осуществления рабочая позиция имеет паз для размещения блоков для мытья полов; минимальное расстояние между вторым поддерживающим механизмом и дном паза больше, чем толщина одного блока для мытья полов.
Загрузочная часть, предоставленная по этой схеме, снабжена модулем подачи блоков для мытья полов, модулем сбора блоков для мытья полов и поддерживающими компонентами, при этом поддерживающие компоненты включают в себя первый поддерживающий компонент и второй поддерживающий компонент, первый поддерживающий компонент предназначен для поддерживания блока для мытья полов в первом модуле хранения, а второй поддерживающий компонент предназначен для поддерживания блока для мытья полов во втором модуле хранения, в частности, благодаря установке во втором поддерживающем компоненте согласующихся первого поддерживающего механизма и второго поддерживающего механизма, когда робот-уборщик нуждается в замене блока для мытья полов, второй поддерживающий механизм переключается в открытое состояние, опуская по крайней мере один блок для мытья полов, а робот-уборщик может войти на базовую станцию для замены блока для мытья полов. Соответственно, оставшиеся блоки для мытья полов в блоке хранения поддерживаются первым поддерживающим механизмом во избежание падения вплоть до момента, когда второй поддерживающий механизм перейдет в опорное состояние и снова поддерживает блок для мытья полов, дожидаясь следующей замены роботом-уборщиком нового блока для мытья полов. Таким образом, при использовании на сценарии замены тряпки устройство подачи блока для мытья полов, предоставленное в данном варианте осуществления, может реализовать автоматическую подачу тряпки, чтобы осуществить автоматическую замену тряпки, уменьшая вмешательство пользователя при замене тряпки и улучшая пользовательский опыт. В одном варианте осуществления, второй поддерживающий компонент включает в себя первый поддерживающий механизм и второй поддерживающий механизм, в частности, первый поддерживающий механизм включает в себя первый набор телескопических механизмов перегородки, в то время как второй поддерживающий механизм включает в себя второй набор телескопических механизмов перегородки, первый набор телескопических механизмов перегородки и второй набор телескопических механизмов перегородки, расположенных под первым набором телескопических перегородок, блок передачи также включает в себя приводную часть, которая приводит в движение первый набор телескопических механизмов перегородки для переключения между выдвинутым положением и сжатым положением для фиксации и высвобождения блока для мытья полов, приводная часть также приводит в действие второй набор телескопических механизмов перегородки для переключения между выдвинутым положением и сжатым положением, чтобы фиксировать блок для мытья полов, высвобожденный из первого набора телескопических механизмов перегородки, и высвободить по крайней мере один из блоков для мытья полов, осуществляя таким образом постепенное высвобождение блоков для мытья полов.
В одном варианте осуществления приводная часть приводит в движение первый набор телескопических механизмов перегородки для перемещения из выдвинутого положения в сжатое положение, а второй набор телескопических механизмов перегородки – из сжатого положения в выдвинутое, реализуя высвобождение на первой степени блока для мытья полов, приводная часть приводит в движение второй набор телескопических механизмов перегородки для перемещения из выдвинутого положения в сжатое, а первый набор телескопических механизмов перегородки – из сжатого положения в выдвинутое, реализуя высвобождение на второй степени по крайней мере одного блока для мытья полов.
В одном варианте осуществления, когда первый набор телескопических механизмов перегородки перемещается из сжатого положения в выдвинутое положение, первый набор телескопических механизмов перегородки может блокировать блоки для мытья полов, находящиеся над по крайней мере одним блоком для мытья полов, высвобожденным на второй ступени.
В одном варианте осуществления приводная часть синхронно приводит в действие первый набор телескопических механизмов перегородки и второй набор телескопических механизмов перегородки.
В одном варианте осуществления соотношение между вертикальным расстоянием d от первого набора телескопических механизмов перегородки до второго набора телескопических механизмов перегородки и толщиной n каждого блока для мытья полов удовлетворяет тому, что n В одном варианте осуществления первый набор телескопических механизмов перегородки и второй набор телескопических механизмов перегородки соответственно содержат множество телескопических перегородок, расположенных по крайней мере на двух боковых стенках второго модуль хранения. В одном варианте осуществления по крайней мере две боковые стенки включают две противоположные боковые стенки. В одном варианте осуществления по крайней мере две боковые стенки включают переднюю стенку и заднюю стенку робота-уборщика. В одном варианте осуществления механизм передачи состоит из зубчатой передачи и реечной конструкции. В одном варианте осуществления, когда робот-уборщик нуждается в замене блока для мытья полов, под контролем блока управления робот входит на базовую станцию и компонент подключения отсоединяет блок для мытья полов, а модуль сбора блоков для мытья полов собирает блок для мытья полов, отсоединенный от корпуса робота в первый модуль хранения. В одном варианте осуществления, когда робот-уборщик заменяет блок для мытья полов, модуль подачи блоков для мытья полов передает блок для мытья полов из второго модуля хранения роботу для установки, а под контролем блока управления компонент подключения устанавливает блок для мытья полов. В одном варианте осуществления первый модуль хранения включает в себя блок контроля состояния хранения, когда состояние блока для мытья полов в первом модуле хранения удовлетворяет предварительно заданным условиям, пользователю отправляется команда на очистку блока для мытья полов. В одном варианте осуществления предварительно заданные условия включают в себя случай, когда первый модуль хранения полностью загружен блоками для мытья полов. В одном варианте осуществления предварительно заданные условия включают в себя случай, когда блоки для мытья полов хранились в первом модуле хранения в течение определенного времени. В одном варианте осуществления второй модуль хранения включает в себя блок контроля состояния хранения, когда обнаруживается, что количество блоков для мытья полов во втором модуле хранения меньше или равно заданному значению, выдается пользователю команда об увеличении количества блоков для мытья полов. В одном варианте осуществления робот-уборщик включает в себя датчик установки блока для мытья полов, выдается пользователю инструкция о неисправности, когда обнаруживается, что на роботе не установлен блок для мытья полов. В одном варианте осуществления базовая станция включает в себя датчик обнаружения неисправности, выдает пользователю инструкцию о неисправности, когда обнаруживается неисправность блока передачи. В одном варианте осуществления робот-уборщик включает в себя датчик определения положения, когда обнаруживается, что положение между роботом и базовой станцией удовлетворяет первому условию, под контролем компонент подключения отсоединяет блок для мытья полов; а когда обнаруживается, что положение между роботом и базовой станцией удовлетворяет второму условию, под контролем компонент подключения устанавливает блок для мытья полов. В одном варианте осуществления датчик определения положения включает в себя датчик измерения расстояния, первое условие заключается в том, что расстояние между роботом и базовой станцией достигает первого заданного значения, а второе условие заключается в том, что расстояние между роботом и базовой станцией достигает второго значения. В одном варианте осуществления датчик определения положения включает в себя по крайней мере один из инфракрасного датчика, лазерного датчика и ультразвукового датчика. В одном варианте осуществления датчик определения положения включает в себя датчик контроля магнитного поля, и первое условие заключается в контроле первого магнита на базовой станции, а второе условие заключается в контроле второго магнита на базовой станции. В одном варианте осуществления компонент подключения включает в себя эластичный элемент, чтобы блок для мытья полов во время работы находился в контакте с натягом с рабочей поверхностью. В одном варианте осуществления эластичный элемент включает в себя по крайней мере одно из пружины, пластинчатой пружины и пружины сжатия. В одном варианте осуществления робот-уборщик включает в себя вибромотор, подключенный к компоненту подключения для обеспечения вибрационного контакта блока для мытья полов с рабочей поверхностью, а компонент подключения включает в себя амортизирующий элемент для снижения вибрации, передаваемой от вибромотора на корпус робота-уборщика через компонент подключения. В одном варианте осуществления амортизирующий элемент включает в себя резиновую стойку. В одном варианте осуществления робот-уборщик является бытовым и/или домашним сервисным роботом. По сравнению с предшествующим уровнем техники настоящее изобретение имеет следующие положительные эффекты: в предлагаемой изобретением роботизированной системе чистки робот-уборщик может автоматически определять условия замены блока для мытья полов и автоматически заменять блок для мытья полов для робота-уборщика, устанавливая блок передачи и блок хранения на базовой станции, что улучшает опыт автоматизации пользователей, при этом метод замены простой и процесс замены быстрый. Предлагаемое в изобретении конструктивное исполнение базовой станции позволяет реализовать многофункциональное мультиплексирование базовой станции, имеет компактную структуру и сокращает занимаемую площадь. В одном варианте осуществления предложена базовая станция: включающая в себя функциональный блок, который расположен над этой базовой станцией и используется для выполнения предустановленных функций; принимающую полость, которая окружена функциональным блоком и базовой станцией и используется для размещения робота-уборщика, а функциональный блок расположен над принимающей полостью; передатчик сигнала, который, по крайней мере, используется для выдачи роботу-уборщику сигнала о инструкции выезда из принимающей полости; операционную часть, электрически соединенную с передатчиком сигнала, чтобы по крайней мере управлять передатчиком сигнала для отправки сигнала инструкции выезда. В одном варианте осуществления передатчик сигнала также может использоваться для выдачи сигнала о команде на въезд в принимающую полость, а операционная часть электрически связана с передатчиком сигнала, чтобы по крайней мере управлять передатчиком сигнала для отправки сигнала инструкции выезда. В одном варианте осуществления передатчик сигнала размещен в принимающей полости. В одном варианте осуществления принимающая полость имеет отверстие, сообщающееся с внешним пространством для выезда и/или въезда робота-уборщика, а базовая станция включает в себя опорную часть, обращенную к отверстию, а передатчик сигнала расположен на опорной части. В одном варианте осуществления операционная часть расположена открыто на внешней поверхности базовой станции. В одном варианте осуществления операционная часть расположена на верхней поверхности базовой станции. В одном варианте осуществления функциональный блок включает в себя блок хранения для размещения хранимых веществ. В одном варианте осуществления блок хранения расположен над принимающей полостью, а функциональный блок включает в себя сообщающееся отверстие, которое может открываться и закрываться. Когда сообщающееся отверстие в открытом состоянии, блок хранения сообщается с принимающей полостью сверху и снизу, а когда сообщающееся отверстие в закрытом состоянии, блок хранения не сообщается с принимающей полостью сверху и снизу. В одном варианте осуществления блок хранения используется для хранения блока для мытья полов робота-уборщика, включает в себя первый модуль хранения для хранения грязного блока для мытья полов и второй модуль хранения для хранения чистого блока для мытья полов, а сообщающееся отверстие включает в себя первое сообщающееся отверстие и второе сообщающееся отверстие, расположенные под первым модулем хранения и вторым модулем хранения соответственно и способные открываться и закрываться. В одном варианте осуществления первый модуль хранения и второй модуль хранения расположены над принимающей полостью рядом друг с другом в горизонтальном направлении. В одном варианте осуществления базовая станция включает в себя нижнюю пластину и опорную часть, соединяющую нижнюю пластину с функциональным блоком, а нижняя пластина включает в себя канавку для размещения хранимых веществ. В одном варианте осуществления базовая станция дополнительно включает в себя блок зарядки для зарядки робота-уборщика, а блок зарядки включает в себя клемму зарядки, предназначенную для стыковки с роботом-уборщиком для зарядки. Настоящее изобретение также может иметь следующую техническую схему: Система робота-уборщика, включающая в себя указанную выше базовую станцию и робот-уборщик, соответствующий базовой станции, а робот-уборщик включает в себя приемник сигнала, предназначенный для приема сигнала о команде, передаваемого передатчиком сигнала. В одном варианте осуществления приемник сигнала расположен перед направлением движения робота-уборщика. В одном варианте осуществления робот-уборщик включает блок для мытья полов, предназначенный для очистки полов. По сравнению с предшествующим уровнем техники схема, предлагаемая в настоящем изобретении, имеет следующие положительные эффекты: благодаря установке кнопки на базовой станции, с помощью которой можно, по крайней мере, управлять выходом робота-уборщика, можно избежать случая, когда робот-уборщик застревает в принимающей полости базовой станции и пользователь не может выводить робот-уборщик. В одном варианте осуществления предоставляется: базовая станция робота-уборщика, включающая в себя: блок зарядки, расположенный на базовой станции и используемый для зарядки робота-уборщика; блок хранения, снабженный блоком хранения, предназначенный для хранения блока для мытья полов робота-уборщика; блок контроля состояния хранения, предназначенный для определения, находится ли состояние хранения в блоке хранения в предварительно заданном состоянии; блок напоминания, предназначенный для отправки информации напоминания, указывающей на то, что состояние хранения в блоке хранения находится в предварительно заданном состоянии; блок управления, под контролем которого блок напоминания выдает информацию напоминания в соответствии с результатом контроля, проведенного блоком контроля состояния хранения. В одном варианте осуществления базовая станция дополнительно включает в себя блок передачи, приводящий в движение блок для мытья полов, блок управления также используется для управления блоком передачи, чтобы автономно проводить в движение блок для мытья полов, осуществляя автоматическую замену блока для мытья полов. В одном варианте осуществления блок контроля состояния хранения включает в себя элемент обнаружения, и подвижный элемент, по крайней мере частично подвижно размещенный в блоке хранения для срабатывания элемента обнаружения. В одном варианте осуществления блок контроля состояния хранения дополнительно включает в себя упругий элемент, предоставляющий возвращающую силу подвижному элементу. В одном варианте осуществления подвижный элемент расположен на внутренней стенке блока хранения, так что к блоку для мытья полов можно прикасаться, когда он помещен в блок хранения. В одном варианте осуществления блок контроля состояния хранения включает в себя фотоэлектрический датчик, включающий в себя передающий конец и приемный конец, а соединительная линия между передающим концом и приемным концом проходит через блок хранения. В одном варианте осуществления блок контроля состояния хранения включает в себя по крайней мере один из датчика Холла, инфракрасного датчика, геркона, фотоэлектрического переключателя и микропереключателя. В одном варианте осуществления блок напоминания включает в себя по крайней мере одно из устройства световой сигнализации, устройства звуковой сигнализации, и блока беспроводной передачи для выдачи информации напоминания наружу. В одном варианте осуществления блок хранения расположен над базовой станцией, которая включает в себя нижнюю пластину и опорную часть, соединяющую нижнюю пластину с блоком хранения, а блок хранения, опорная часть и базовая станция образуют принимающую полость для размещения робота-уборщика, блок хранения расположен над принимающей полостью и включает в себя сообщающееся отверстие, которое может открываться и закрываться, Когда сообщающееся отверстие в открытом состоянии, блок хранения сообщается с принимающей полостью сверху и внизу, а когда сообщающееся отверстие в закрытом состоянии, блок хранения не сообщается с принимающей полостью сверху и внизу. В одном варианте осуществления блок хранения включает в себя первый модуль хранения, предназначенный для хранения грязного блока для мытья полов, и второй модуль хранения, предназначенный для хранения чистого блока для мытья полов, а первый модуль хранения и второй модуль хранения включают в себя блок контроля состояния хранения соответственно. По сравнению с предшествующим уровнем техники схема, предлагаемая в настоящем изобретении, имеет следующие положительные эффекты: благодаря установке на базовой станции блока хранения, предназначенного для хранения блока для мытья полов, и блока контроля состояния хранения, предназначенного для контроля блока для мытья полов, базовая станция может информировать пользователя о состоянии хранения в блоке хранения своевременно, когда тряпка автоматически заменяется, избегая при этом случая, когда невозможно продолжать автоматическую замену из-за недостаточного запаса чистых блоков для мытья полов или полной загрузки грязными блоками для мытья полов. Описание чертежей Вышеуказанные задачи, технические решения и положительные эффекты настоящего изобретения могут осуществляться с помощью следующих чертежей: Рис. 1 – пространственная диаграмма роботизированной системы чистки согласно одному варианту осуществления настоящего изобретения. Рис. 2 – пространственная диаграмма робота-уборщика согласно одному варианту осуществления настоящего изобретения. Рис. 3 – вид робота-уборщика снизу, изображенного на рис. 2. Рис. 4 – схематическая диаграмма блока для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 5 – схематическая диаграмма робота-уборщика без блока для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 6 – схематическая диаграмма робота-уборщика с установленным блоком для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 7 и Рис. 8 – схематические диаграммы компонента подключения робота-уборщика согласно одному варианту осуществления настоящего изобретения. Рис. 9 – схематическая диаграмма базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 10 – вид в разрезе базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 11 – схематическая диаграмма сбора блока для мытья полов на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 12 – схематическая диаграмма модуля сбора блоков для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 13, 14 и 15 – схематические диаграммы подъемного механизма согласно одному варианту осуществления настоящего изобретения. Рис. 16 – схематическая диаграмма подачи блока для мытья полов на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 17, 18 – схематические диаграммы модуля подачи блоков для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 19, 20 и 21 – схематические диаграммы процесса замены роботом блока для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 22 – схематическая диаграмма отсоединения второго модуля хранения от базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 23 – схематическая диаграмма базовой станции, находящейся в первом положении согласно другому варианту осуществления настоящего изобретения. Рис. 24 – схематическая диаграмма базовой станции, находящейся во втором положении согласно другому варианту осуществления настоящего изобретения. Рис. 25 – блок-схема замены блока для мытья полов в роботизированной системе чистки согласно настоящему изобретению. Рис. 26 – схематическое изображение блоков роботизированной системы чистки настоящего изобретения. Рис. 27 – схематическая диаграмма нижней пластины базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 28 – схематическая диаграмма настройки модуля подачи блоков для мытья полов на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 29 – схематическая диаграмма модуля подачи блоков для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 30 – вид сбоку модуля подачи блоков для мытья полов согласно одному варианту осуществления настоящего изобретения. Рис. 31 – схематическая диаграмма первого набора телескопических механизмов перегородки в выдвинутом положении согласно одному варианту осуществления настоящего изобретения. Рис. 32 – схематическая диаграмма первого набора телескопических механизмов перегородки, высвобождающих блок для мытья полов на первой степени согласно одному варианту осуществления настоящего изобретения. Рис. 33 – схематическая диаграмма первого набора телескопических механизмов перегородки, высвобождающих блок для мытья полов на второй степени согласно одному варианту осуществления настоящего изобретения. Рис. 34 – схематическая диаграмма установки вспомогательной направляющей структуры на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 35 – вид сбоку вспомогательной направляющей структуры на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 36 – схематическая диаграмма операционной части на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 37 – схематическая диаграмма первого модуля хранения согласно одному варианту осуществления настоящего изобретения. Рис. 38 – схематическая диаграмма датчика обнаружения неисправности на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 39 – схематическая диаграмма блока контроля сохранения состояния на базовой станции согласно одному варианту осуществления настоящего изобретения. Рис. 40 – схематическая диаграмма структуры базовой станции, представленной согласно одному варианту осуществления настоящей заявки; Рис. 41 – схематическая диаграмма приводной конструкции модуля подачи блоков для мытья полов, представленного на рис. 40; Рис. 42 – схематическая диаграмма начального состояния модуля подачи блоков для мытья полов, представленного на рис. 40; Рис. 43–47 – схематические диаграммы процесса опускания блока для мытья полов из модуля подачи блоков для мытья полов. Рис. 48 – вид сверху в одном варианте осуществления базовой станции робота-уборщика согласно настоящему изобретению; Рис. 49 – вид спереди извлечения блока для мытья полов в одном варианте осуществления базовой станции робота-уборщика согласно настоящему изобретению; Рис. 50 – вид спереди высвобождения блока для мытья полов в одном варианте осуществления базовой станции робота-уборщика согласно настоящему изобретению; Рис. 51 – вид спереди приводной части в одном варианте осуществления базовой станции робота-уборщика согласно настоящему изобретению в другом варианте осуществления; Рис. 52 – схематическая диаграмма второго поддерживающего компонента в одном варианте осуществления базовой станции робота-уборщика согласно настоящему изобретению; Рис. 53 – схематическая диаграмма открытого сообщающегося отверстия на базовой станции в одном варианте осуществления настоящего изобретения; Рис. 54 – схематическая диаграмма закрытого сообщающегося отверстия на базовой станции, показанной на рис. 53; Рис. 55 – схематическая диаграмма подвижного элемента не возбужденного блоком для мытья полов в одном варианте осуществления настоящего изобретения; Рис. 56 – схематическая диаграмма подвижного элемента возбужденного блоком для мытья полов, показанного на рис. 55. Варианты осуществления изобретения Далее приведено подробное описание и техническое содержание настоящего изобретения в сочетании с чертежами, однако чертежи предоставлены только для справки и описания и не используются для ограничения настоящего изобретения. На рис. 1 изображена роботизированная система чистки 300 согласно одному варианту осуществления настоящего изобретения. Ссылаясь на рис. 26, на рис. 26 представлена схема составных блоков роботизированной системы чистки в данном варианте осуществления. В состав этой роботизированной системы чистки 300 входят робот-уборщик 100, блок для мытья полов 310, съемным образом соединенный с роботом-уборщиком 100, и базовая станция 200, предназначенная для парковки робота-уборщика 100. Робот-уборщик 100 включает в себя: основной корпус; подвижный блок, расположенный на основном корпусе и приводящий робот-уборщик 100 в движение по рабочей поверхности; компонент подключения, используемый для съемной установки блока для мытья полов на корпусе робота. Базовая станция 200 включает в себя: блок хранения 210, предназначенный для хранения по крайней мере одного блока для мытья полов 310; рабочие позиции, сформированные на базовой станции 200 и формирующие интервальное пространство с блоком хранения 210 для парковки робота-уборщика, чтобы заменить блок для мытья полов; блок передачи, предназначенный для передачи блока для мытья полов 310 между блоком хранения 210 и рабочей позицией; роботизированная система чистки 300 также включает в себя блок управления, который управляет компонентом подключения 120 для установки и/или удаления соответствующего блока для мытья полов 310 в рабочей позиции, чтобы робот-уборщик 100 заменил блок для мытья полов. В частности, выборочно, блок управления располагается по крайней мере на одной из базовой станции 200 и робота-уборщика 100. Кроме того, роботизированная система чистки 300 также включает в себя блок для мытья полов 310, пригодный для использования совместно с базовой станцией 200 и роботом-уборщиком 100. На рис. 4 изображено исполнение блока для мытья полов 310 в данном варианте осуществления. Данный блок для мытья полов 310 включает в себя заднюю пластину 311, пригодную для соединения с тряпкой 312. В блоке для мытья полов 310 выполнена выемка 313, при этом в качестве тряпки 312 может быть использована как обычная тряпка, так и влажная салфетка, губчатая салфетка, разлагаемая швабра и другие распространенные средства. Задняя пластина 311 включает в себя адсорбционные элементы, в частности, адсорбционные элементы включают в себя магнитные элементы, которые могут быть соединены с роботом-уборщиком 100 и размещены на базовой станции 200 с помощью магнитного воздействия. В частности, блок для мытья полов 310 включает в себя паз, тряпка 312 включает в себя одноразовую бумагу для чистки пола и т.п. Площадь поверхности тряпки 312 больше, чем у задней пластины 311, которая снабжена пазом, чтобы тряпка 312 охватила заднюю пластину и фиксировалась через паз на задней пластине, образуя таким образом комплектный блок для мытья полов 310. который можно установить на роботе-уборщике 100 для работы. Когда блок для мытья полов 310 стала грязной, робот-уборщик 100 отсоединяет блок для мытья полов 310 и размещает его на базовой станции 200. Пользователь может отсоединить тряпку 312, соединенную с задней пластиной 311, и заменить ее новой тряпкой 312, чтобы получить чистый блок для мытья полов 310 и передать его базовой станции 200 для установки на роботе-уборщике 100. В данном варианте осуществления тряпка 312 соединена с задней пластиной 311 и выходит немного за пределы задней пластины 311 по краям, то есть размеры тряпки 312 больше, чем размеры задней пластины 311. Благодаря тому, что размеры тряпки 312 немного больше размеров задней пластины 311, когда робот-уборщик 100 должен очистить угловые участки, например стеновые трещины, блок для мытья полов 310 может лучше контактировать с очищаемой поверхностью, давая хороший эффект очистки на вертикальных поверхностях в углах стены, обеспечивая более высокую чистоту в угловых зонах. В других вариантах осуществления в качестве способа установки блока для мытья полов 310 также можно использовать зажим в пазу, склеивание и другие распространенные средства в данной области. При этом соответственно изменяются и соответствующие конструктивное исполнение установки блока для мытья полов на роботе-уборщике 100 и размещения блока для мытья полов на базовой станции 200. В данном варианте осуществления робот-уборщик 100, как показано на рис. 2 и рис. 3, включает в себя основной корпус, и подвижный блок, предназначенный для приведения основного корпуса в движение по рабочей поверхности, а подвижный блок включает в себя ходовые колеса 110. Понятно, что подвижный блок может также включать в себя гусеничную конструкцию или другие обычные конструкции для передвижения. Робот-уборщик 100 также включает в себя механизмы очистки, который может быть выполнен в различных формах. В данном варианте осуществления в качестве механизма очистки используется блок для мытья полов 310, а робот-уборщик 100 выполняет задачу по мытью полов на рабочей поверхности с помощью блока для мытья полов 310. В других вариантах осуществления механизм очистки робота-уборщика 100 может также включать в себя роликовую щетку и боковую щетку, которые используются для очистки от мусора, такого как пыль на полу, в углах и т.д. Например, боковая щетка сметает мелкие загрязнения к роликовой щетке, которая убирает все загрязнения в пылесборник. Робот-уборщик 100 также включает в себя силовой механизм, энергетический блок и сенсорную систему. Силовой механизм включает в себя двигатель и соединенный с ним механизм передачи, который соединен с подвижным блоком. Двигатель приводит в действие механизм передачи, под действием механизма передачи подвижной блок передвигается, при этом механизм передачи может быть червячным, коническим зубчатый механизмом и др. А энергетический блок робота-уборщика 100 настроен для обеспечения энергией робота-уборщика 100 и питания силового механизма, чтобы робот-уборщик 100 мог двигаться и выполнять работу. В качестве энергетического блока обычно используется батарейный блок. Когда расходование энергии батарейным блоком достигнет порогового значения, робот-уборщик 100 автоматически возвращается на зарядную станцию для пополнения энергии и продолжает работу после зарядки. Сенсорная система робота-уборщика 100 включает в себя датчик обрыва, при обнаружении края пропасти можно изменить маршрут движения; боковой датчик, при обнаружении бокового края рабочей зоны можно генерировать команды на движение по краю; датчик наклона, при обнаружении наклона машины можно изменить стратегию работы и издать инструкцию пользователю; и другие распространенные датчики, они повторяться здесь не будут. Кроме того, робот-уборщик 100 также включает в себя блок управления, который может включать в себя цифровой сигнальный процессор (Digital Signal Processor, DSP), микропроцессор (Micro Processor Unit, MPU), специализированную интегральную схему (Application Specific Integrated Circuit, ASIC), система на чипе (System on Chip, SOC) программируемого логического устройства (Programmable Logic Device, PLD), центральный процессор (Central Processing Unit, CPU) или программируемая пользователем вентильная матрица (Field Programmable Gate Array, FPGA) и т.д. Блок управления может управлять роботом-уборщиком 100 в соответствии с заданными условиями или командой, полученной роботом-уборщиком 100. В частности, блок управления может управлять движением подвижного блока в рабочей зоне робота-уборщика 100 в соответствии с предварительно установленным маршрутом, во время приведения подвижным блоком робота-уборщика 100 в движение, срабатывает механизм очистки, таким образом удаляя пятна и пыль с поверхности рабочей зоны. Подвижный блок приводит в движение робот-уборщик 100 по заданному маршруту. Когда механизм очистки закончил уборку, под контролем блока управления механизмом очистки прекращает работу и подвижный блок передвигается, чтобы подвижный блок вывел робот-уборщик 100 из рабочей зоны. Маршрут движения робота-уборщика 100 может быть задан заранее в блоке управления и исполнен подвижным блоком под контролем блока управления. Согласно рис. 5 и рис. 6, в данном варианте осуществления блок для мытья полов 310 может быть установлен на роботе-уборщике 100 с возможностью снятия. На рис. 5 представлено робот-уборщик 100 без блока для мытья полов 310, а на рис. 6 представлен робот-уборщик 100 с установленным блоком для мытья полов 310, робот-уборщик 100 с установленным блоком для мытья полов 310 может передвигаться в рабочей зоне и выполнять операции уборки. В данном варианте осуществления робот-уборщик 100 также включает в себя компонент подключения 120. Робот-уборщик 100 может автоматически установить блок для мытья полов 310 на роботе-уборщике 100 через компонент подключения 120 и управлять компонентом подключения 120 с помощью блока управления для отсоединения блока для мытья полов 310 от робота-уборщика 120. В данном варианте осуществления согласно рис. 7 и рис. 8, компонент подключения 120 включает в себя раму 121, соединенную с основным корпусом робота-уборщика 100, перегородку 122, через которую блок для мытья полов 310 соединен с основным корпусом робота-уборщика 100. В данном варианте осуществления компонент подключения 120 включает в себя магнитные элементы, под действием которых блок для мытья полов 310 соединен с основным корпусом робота-уборщика 100. В данном варианте осуществления компонент подключения 120 может регулировать высоту блока для мытья полов 310 от пола в ответ на управляющий сигнал блока управления. В данном варианте осуществления, когда робот-уборщик 100 должен установить блок для мытья полов 310, под контролем блока управления компонент подключения 120 опускается, приближаясь к блоку для мытья полов 310, а магнитный элемент на компоненте подключения 120 и магнитный элемент 314 на блоке для мытья полов 310 приближаются друг к другу, притягивая друг друга, таким образом блок для мытья полов 310 подключен к основному корпусу робота-уборщика 100. В данном варианте осуществления, когда необходимо отсоединять блок для мытья полов 310 от корпуса робота-уборщика 100, под контролем блока управления компонент подключения 120 поднимается, а компонент подключения 120 также включает в себя выталкивающий стержень 123, который оказывает давление вниз на блок для мытья полов 310, отсоединяя блок для мытья полов 310 от основного корпуса робота-уборщика 100. В данном варианте осуществления блок для мытья полов 310 контактирует с полом для очистки поверхности во время выполнения операции уборки, а когда не выполняется операция уборки, например, во время возвращения для зарядки или для замены блока для мытья полов, поднимают блок для мытья полов 310, чтобы блок для мытья полов 310 не соприкасался с полом, предотвращая при этом загрязнение грязным блоком для мытья полов 310 очищенной рабочей поверхности. Благодаря установке компонента подключения 120, имеющего преимущества, заключающиеся в том, что блок для мытья полов 310 автоматически подключается к основному корпусу робота-уборщика 100, а также блок для мытья полов 310 автоматически отсоединяется от основного корпуса робота-уборщика 100. Такая конструкция может эффективно сократить ручное участие в работе робота-уборщика 100. Робот-уборщик 100 обычно используется для уборки различных участков в доме, чтобы полностью убрать комнату. Однако разные участки дома часто имеют разный уровень загрязнения, особенно на некоторых участках могут быть стойкие пятна, которые трудно очистить. В одном варианте осуществления компонент подключения 120 робота-уборщика 100 также включает в себя эластичный элемент 124, как показано на рис. 7, например, пружину, пластинчатую пружину и т.д. Эластичный элемент 124 расположен между рамой 121 и перегородкой 122 робота-уборщика 100. Когда блок для мытья полов 310 соединен с перегородкой 122 робота-уборщика 100, пользователь может приложить давление вниз на раму 121, регулируя раму 121 вручную или с помощью искусственного интеллекта, и пружина реагирует на давление, передаваемое через раму 121, оказывая давление на перегородку 122, поскольку перегородка 122 соединен с блоком для мытья полов 310, то блок для мытья полов 310 оказывает таким образом давление на пол. В частности, робот-уборщик 100 также включает в себя элемент обнаружения, такой как датчик зрения, который определяет степень чистоты текущей рабочей поверхности и регулирует давление пружины на основе степени чистоты текущей поверхности. В частности, когда робот-уборщик 100 обнаруживает, что текущая рабочая поверхность загрязнена и нуждается в тщательной очистке, и на текущей рабочей поверхности есть вещества, которые трудно очистить, то автоматически регулирует эластичный элемент 124, увеличивая давление, приложенное на блок для мытья полов 310, обеспечивая таким образом лучший эффект очистки. Когда робот-уборщик 100 определяет, что текущая рабочая поверхность относительно чистая, то автоматически снижает давление эластичного элемента 124 на блок для мытья полов 310, тем самым снижая потребление энергии роботом-уборщиком 100. Установив эластичный элемент 124, можно обеспечить более плотное прилегание блока для мытья полов 310 к полу, и в то же время обеспечить лучший эффект очистки полов, что позволяет эффективно удалять стойкие пятна в доме. В одном варианте осуществления робот-уборщик 100 также включает в себя вибромотор (условно не показан), который подключен к компоненту подключения 120 и используется для приложения силы вибрации к блоку для мытья полов 310, так что блок для мытья полов 310 может осуществить вибрационный контакт с рабочей поверхностью, обеспечивая лучший эффект очистки. Благодаря установке вибромотора, блок для мытья полов 310 вибрирует, но если блок для мытья полов 310 продолжает вибрировать во время работы, то вибрация будет передаваться другим компонентам робота-уборщика 100, что может повлиять на стабильность работы робота-уборщика 100 и срок службы компонентов робот-уборщик 100. В одном варианте осуществления компонент подключения 120 робота-уборщика 100 также включает в себя буферное устройство 125, как показано на рис. 8, например, резиновую стойку, которая расположена между рамой 121 и перегородкой 122 для амортизации и уменьшения вибрации. Ссылаясь на рис. 1 и рис. 9 робот-уборщик 100 включает в себя блок хранения 210 и рабочие позиции, при этом блок хранения расположен над рабочими позициями, а блок хранения 210 включает в себя первый модуль хранения 211 и второй модуль хранения 212, при этом первый модуль хранения для хранения блоков для мытья полов 310, отсоединенных от робота-уборщика, второй модуль хранения используется для хранения блоков для мытья полов 310, предназначенных для установки на роботе-уборщике 100. Рабочие позиции включают в себя первую рабочую позицию 251 и вторую рабочую позицию 252, при этом первая рабочая позиция используется для отсоединения блока для мытья полов 310 от робота-уборщика 100, вторая рабочая позиция 252 используется для установки блока для мытья полов 310 на роботе-уборщике. В частности, первый модуль хранения 211 расположен над первой рабочей позицией, второй модуль хранения 212 расположен над второй рабочей позицией 252. Благодаря установке блока хранения 210 над рабочими позициями, блок для мытья полов может передаваться, перемещаясь в вертикальном направлении, что делает конструкцию базовой станции компактной. Благодаря установке двух модулей хранения и двух стыковочных позиций, робот-уборщик 100 может отсоединить и установить блок для мытья полов 310 в разных положениях, тем самым реализуя автоматическую замену роботом-уборщиком блока для мытья полов 310. В частности, базовая станция 200 включает в себя блок передачи, предназначенный для передачи блока для мытья полов между блоком хранения и рабочей позицией. В частности, блок передачи включает в себя приводную часть и загрузочную часть, загрузочная часть соединена с блоком для мытья полов и приводит блок для мытья полов в перемещение под действием приводной части. Загрузочная часть включает в себя модуль сбора блоков для мытья полов 231 и модуль подачи блоков для мытья полов 236, а модуль сбора блоков для мытья полов 231 перемещает блок для мытья полов 310, отсоединенный от робота-уборщика 100, из первой рабочей позиции 251 в первый модуль хранения 211; модуль подачи блоков для мытья полов 236 получает блок для мытья полов 310 из второго модуля хранения 212 и перемещает его во вторую рабочую позицию 252 для установки на роботе-уборщике 100. А также, загрузочная часть включает в себя поддерживающий компонент, предназначенный для поддерживания блока для мытья полов в блоке хранения и предотвращения его падения. В частности, поддерживающий компонент включает в себя первый поддерживающий компонент, предназначенный для поддерживания блока для мытья полов в первом модуле хранения, и второй поддерживающий компонент, предназначенный для поддерживания блока для мытья полов во втором модуле хранения. В частности, модуль сбора блоков для мытья полов включает в себя первый поддерживающий компонент, а модуль подачи блоков для мытья полов включает в себя второй поддерживающий компонент, то есть поддерживающий компонент включает в себя первый поддерживающий компонент модуля сбора блоков для мытья полов и второй поддерживающий компонент модуля подачи блоков для мытья полов. В частности, модуль сбора блоков для мытья полов 231 используется для сбора блоков для мытья полов 310, отсоединенных от основного корпуса робота-уборщика 100, модуль подачи блоков для мытья полов 236 используется для передачи роботу-уборщику 100 блоков для мытья полов 310, чтобы робот-уборщик 100 заменил блок для мытья полов. Взаимодействуя с модулем сбора блоков для мытья полов, первый модуль хранения 211 собирает блок для мытья полов 310, отсоединенный от основного корпуса робота-уборщика 100 в первый модуль хранения 211; взаимодействуя с модулем подачи блоков для мытья полов, второй модуль хранения 212 передает роботу-уборщику 100 для установки блок для мытья полов 310, хранящийся во втором модуле хранения 212, через модуль подачи блоков для мытья полов. В частности, робот-уборщик 100 входит на базовую станцию и достигает рабочей позиции, место, где блок для мытья полов будет установлен на роботе-уборщике 100, соответствует рабочей позиции на базовой станции 200. В частности, когда робот-уборщик 100 достигает первой рабочей позиции 251, робот-уборщик 100 отсоединяет блок для мытья полов 310, установленный на основном корпусе, и помещает его в первую рабочую позицию 251, а когда робот-уборщик достигает второй рабочей позиции 252, робот-уборщик 100 устанавливает блок для мытья полов 310, помещенный во вторую рабочую позицию 252, на основном корпусе робота-уборщика 100. В частности, рабочая позиция включает в себя рабочую область, которая может быть использована для размещения блока для мытья полов 310, и эта область может также использована для отсоединения блока для мытья полов от робота-уборщика 100 и/или для установки блока для мытья полов на роботе-уборщике 100. В частности, первая рабочая позиция 251 включает в себя первую рабочую область, после поступления робота 100 на базовую станцию и достижения первой рабочей области, блок для мытья полов 310, установленный на основном корпусе робота, отсоединяется и помещается в первую рабочую область, где может быть уложено более одного блока для мытья полов, а вторая рабочая позиция 252 включает в себя вторую рабочую область, после поступления робота на базовую станцию и достижения второй рабочей области, блок для мытья полов 310, помещенный во вторую рабочую область, устанавливается на основном корпусе робота-уборщика. В частности, один или несколько блоков для мытья полов 310 могут быть помещены во вторую рабочую область, то есть рабочая позиция базовой станции 200 включают в себя рабочую область, где может быть размещен блок для мытья полов 310, а робот-уборщик 100 может заменить блок для мытья полов робота-уборщика 100 в этой области. В данном варианте осуществления первый модуль хранения 211 и второй модуль хранения 212 расположены параллельно, как показано на рис. 10. В частности, днища первого модуля хранения 211 и второго модуля хранения 212 расположены примерно в одной плоскости. В частности, первый модуль хранения 211 используется для хранения использованного грязного блока для мытья полов 310, отсоединенного от робота-уборщика 100, а второй модуль хранения 212 используется для хранения чистого блока для мытья полов 310 для установки на роботе-уборщике 100. В частности, как показано на рис. 10, первый модуль хранения 211 и второй модуль хранения 212 могут хранить несколько блоков для мытья полов 310, и несколько блоков для мытья полов 310 уложены друг на друга. В частности, первый модуль хранения 211 и второй модуль хранения 212 имеют примерно одинаковую емкость, и количество блоков для мытья полов, которые могут быть размещены, примерно одинаково. В данном варианте осуществления блок хранения 210 расположен в вертикальном направлении рабочей позиции, в частности, блок хранения 210 расположен над рабочей позицией, так что проекция блока хранения на горизонтальную плоскость примерно покрывает проекцию рабочей области на горизонтальная плоскость. Когда робот-уборщик 100 въезжает на базовую станцию 200, расстояние от вершины робота-уборщика 100 до днища блока хранения базовой станции 200 в вертикальном направлении меньше или равно 50 мм. В данном варианте осуществления положение первого модуля хранения 211 устанавливается в соответствии с первой рабочей позицией 251 робота-уборщика 100 на нижней пластине базовой станции, в частности, первый модуль хранения 211 установлен в вертикальном направлении первой рабочей позиции 251, еще более в частности, первый модуль хранения 211 установлен над первой рабочей позиции 251 в вертикальном направлении, так что проекция первого модуля хранения на горизонтальную плоскость примерно покрывает проекцию первой рабочей позиции на горизонтальная плоскость. В данном варианте осуществления положение второго модуля хранения 212 устанавливается в соответствии со второй рабочей позицией 252 робота-уборщика 100 на нижней пластине базовой станции. В частности, второй модуль хранения 212 устанавливается в вертикальном направлении второй рабочей позиции 252, еще более в частности, второй модуль хранения 212 устанавливается над второй рабочей позицией 252 в вертикальном направлении. В других вариантах осуществления блок хранения 210 также может быть расположен под рабочей позицией, когда робот-уборщик 100 перемещается в рабочую позицию для отсоединения блока для мытья полов, блок передачи собирает блок для мытья полов 310, отсоединенный от основного корпуса робота-уборщика, в блок хранения, совершая движение сверху вниз, и когда робот-уборщик нуждается в установке блока для мытья полов, блок передачи передает для установки роботу-уборщику блок для мытья полов, совершая движение снизу вверх. В данном варианте осуществления, когда робот-уборщик 100 возвращается на базовую станцию 200 для замены блока для мытья полов 310, он входит на базовую станцию 200 и достигает первой рабочей позиции 251, под контролем блока управления блок для мытья полов 310 отсоединяется от робота-уборщика 100; вторая рабочая позиция 252 расположена перед первой рабочей позицией 251 относительно направления движения робота-уборщика 100 на станцию, когда робот-уборщик 100 достигает первой рабочей позиции 251, он продолжает движение вперед ко второй рабочей позиции 252, где робот-уборщик 100 устанавливает блок для мытья полов 310. В данном варианте осуществления второй модуль хранения 212 установлен перед первым модулем хранения 211 относительно направления движения робота-уборщика 100 на станцию. Следовательно, робот-уборщик 100 может сначала подойти к первому модулю хранения 211, а затем ко второму модулю хранения 212 при входе на станцию. Преимущество данного варианта осуществления заключается в том, что блок передачи включает в себя модуль сбора блоков для мытья полов, а робот-уборщик 100 выполняет операции уборки на рабочей поверхности, блок для мытья полов 310 продолжает контакт с рабочей поверхностью, а по истечении определенного периода работы, блок для мытья полов 310 загрязняется и нуждается в замене. Благодаря установке модуля сбора блоков для мытья полов 231 на базовой станции 200 робот-уборщик 100 может автономно вернуться на базовую станцию 200 для замены грязного блока для мытья полов 310, чтобы предотвратить загрязнение рабочей поверхности грязным блоком для мытья полов 310. После того, как робот-уборщик 100 автоматически отсоединяет блок для мытья полов 310 от основного корпуса робота-уборщика 100, с помощью модуля сбора блоков для мытья полов автоматически собирается отсоединенный грязный блок для мытья полов и помещается в первый модуль хранения 211 блока хранения 210, таким образом реализуя размещение грязного блока для мытья полов, тем самым обеспечивая чистоту и порядок рабочей поверхности. В одном варианте осуществления блок передачи включает в себя модуль подачи блоков для мытья полов, благодаря установке которого робот-уборщик 100 может получить новый блок для мытья полов, чтобы заменить, когда блок для мытья полов 310 стал грязным после работы робота-уборщика 100 в течение определенного периода времени, что сокращает объем ручной работы. Благодаря установке модуля подачи блоков для мытья полов, после того, как робот-уборщик 100 отсоединяет использованный грязный блок для мытья полов 310, он должен установить чистый блок для мытья полов 310 для продолжения уборки, базовая станция 200 может автоматически извлекать чистый блок для мытья полов 310, хранящийся в блоке хранения 210, для установки на роботе-уборщике 100. Таким образом, робот-уборщик 100 всегда может автоматически получить чистый блок для мытья полов 310 через базовую станцию 200, чтобы автоматически и непрерывно выполнять работу по очистке рабочей поверхности. В одном варианте осуществления, благодаря установке модуля сбора блоков для мытья полов 231, базовая станция 200 может автоматически собирать использованный грязный блок для мытья полов, отсоединенный от основного корпуса робота-уборщика 100, а благодаря установке модуля подачи блоков для мытья полов, базовая станция может предоставить роботу-уборщику 100 по крайней мере один чистый блок для мытья полов, чтобы установить, такая конструкция позволяет базовой станции 200 собирать грязный блок для мытья полов 310, отсоединенный от робота-уборщика 100 для хранения, и предоставлять роботу-уборщику 100 чистый блок для мытья полов 310 для установки. Когда робот-уборщик 100 должен заменить блок для мытья полов 310, он сначала с помощью компонента подключения отсоединяет блок для мытья полов 310, подключенный к основному корпусу робота, модуль сбора блоков для мытья полов базовой станции 200 собирает этот блок для мытья полов и помещает его в первый модуль хранения; после того, как робот-уборщик 100 отсоединил использованный грязный блок для мытья полов 310 и нуждается в установке чистого блока для мытья полов, с помощью модуля подачи блоков для мытья полов автоматически извлекается чистый блок для мытья полов из второго модуля хранения для установки на роботе-уборщике 100, таким образом робот-уборщик 100 может автоматически отсоединять грязный блок для мытья полов и привести его в порядок, а также автоматически установить чистый блок для мытья полов 310 и продолжать операции уборки на рабочей поверхности. В то же время, когда робот-уборщик 100 заменяет блок для мытья полов 310, рабочая позиция робота-уборщика 100 соответствует блоку хранения 210 базовой станции 200 в вертикальном направлении, когда робот-уборщик 100 взаимодействует с базовой станцией 200, заменяя блок для мытья полов 310, блок передачи приводит блок для мытья полов 310 в движение в вертикальной плоскости, в результате чего базовая станция 200 обладает компактной конструкцией и маршрут движения блока для мытья полов 310 станет более коротким. Как показано на рис. 27, на котором изображена рабочая позиция базовой станции 200, рабочая позиция снабжена упорной конструкций, ограничивающей блок для мытья полов 310, помещенный в рабочую позицию. За счет установки упорной конструкции предотвращается то, что при перемещении робота-уборщика на базовой станции 200 блок для мытья полов, помещенный на рабочую позицию, приводится в движение ходовыми колесами робота-уборщика, положение блока для мытья полов изменяется, что влияет на эффект работы блока для мытья полов. В частности, базовая станция 200 включает в себя нижнюю пластина 250, а рабочая позиция формируется на нижней пластине 250 базовой станции. В одном варианте осуществления первая рабочая позиция 251 снабжена первой упорной конструкцией 260, которая используется для остановки грязного блока для мытья полов 310, отсоединенного от робота-уборщика, чтобы предотвратить не точное падение отсоединенного грязного блока для мытья полов 310 в первую рабочую позицию 251 и перемещение грязного блока для мытья полов 310 после его падения в первую рабочую позицию 251 и другие случаи. В частности, первая упорная конструкция 260 включает в себя первый паз 261, то есть на нижней пластине 250 выполнена структура паза, которая ниже плоскости нижней пластины. Когда робот-уборщик нуждается в замене блока для мытья полов, он возвращается в первую рабочую позицию 251 и компонент подключения робота 100 отсоединяет от робота грязный блок для мытья полов, который выпадает в первый паз 261, то есть первый паз 261 используется для хранения грязного блока для мытья полов 310, отсоединенного от основного корпуса робота. Первый паз 261 имеет определенную глубину и может хранить по крайней мере один грязный блок для мытья полов. Когда необходимо собрать грязный блок для мытья полов, базовая станция 200 автоматически запускает модуль сбора блоков для мытья полов, чтобы собрать грязный блок для мытья полов из первого паза 261 в первый модуль хранения 211. Понятно, когда в первом пазе 261 сохранены несколько грязных блоков для мытья полов, их можно укладывать стопкой в первом пазе 261, причем первый паз 261 имеет определенная емкость, когда количество грязных блоков для мытья полов превышает определенное значение, робот автоматически запускает модуль сбора блоков для мытья полов, чтобы собрать грязные блоки для мытья полов, хранящиеся в первом пазе 261, в первый модуль хранения. Наконец, когда грязные блоки для мытья полов хранятся в первом пазе 261, наивысшая точка грязных блоков для мытья полов не будет превышать высоту боковой стенки первого паза 261, то есть наивысшая точка грязных блоков для мытья полов не будет выше горизонтальной плоскости нижней пластины, так что подвижный блок робота, такой как ходовые колеса, не упадет в структуру паза при прохождении через паз, таким образом, грязные блоки для мытья полов, хранящиеся в структуре паза, не будут раздавлены ходовыми колесами робота и не будет выдвинут из первого паза 261. Например, когда робот отсоединяет грязный блок для мытья полов 310 и продолжает движение вперед до второй рабочей позиции 252 для установки нового блока для мытья полов, ходовые колеса робота проходит через первый паз 261, то есть проходит через отсоединенный грязный блок для мытья полов. Когда накопленные в первом пазе 261 грязные блоки для мытья полов ниже горизонтальной плоскости нижней пластины, можно избежать случая, когда ходовые колеса робота раздавливают отсоединенный грязный блок для мытья полов, что может привести к выдвижению грязного блока для мытья полов из первого паза 261 за счет трения между ходовыми колесами и грязным блоком для мытья полов, оказывая влияние на нормальный сбор грязного блока для мытья полов. Еще например, когда робот выходит из базовой станции 200, он избегает случая, когда ходовые колеса робота раздавливают грязный блок для мытья полов и грязный блок для мытья полов выдвигается из первого паза 261. Как показано на рис. 27, на краю боковой стенки первого паза 261 дополнительно предусмотрена конструкция перегородки 262, чтобы предотвратить выдвижение блока для мытья полов, отсоединенного от робота-уборщика. В одном конкретном варианте осуществления данная конструкция перегородки 262 расположена по крайней мере на краях двух боковых стенок первого паза 261, а также может быть расположена на краях трех или четырех боковых стенок, предпочтительно, в данном варианте осуществления расположена на краях двух противоположных боковых стенок. Конструкция перегородки 262 выступает из горизонтальной плоскости нижней пластины. Когда в первом пазе 261 сохранены грязные блоки для мытья полов, благодаря наличию конструкции перегородки 262 можно предотвращать выдвижение грязного блока для мытья полов ходовыми колесами. В то же время, когда грязный блок для мытья полов отваливается от робота, конструкция перегородки 262 также может играть роль, направляя грязный блок для мытья полов точно в первый паз 261, предотвращая выпадение отсоединенного грязного блока для мытья полов за пределы первого паза 261, оказывая влияние на нормальный сбор грязного блока для мытья полов. При этом форма и количество конструкций перегородок 262 не ограничены, и в состав которых включены конструкции, которые выступают из горизонтальной плоскости нижней пластины и могут играть блокирующую роль, такие как перегораживающая полоса и упор. Как показано на рис. 27, кроме того, в варианте осуществления настоящего изобретения на второй рабочей позиции 252 также выполнена вторая упорная конструкция 263 для остановки блока для мытья полов 310, установленного на роботе, а вторая упорная конструкция 263 включает в себя второй паз 264 для хранения блока для мытья полов, предназначенного для установки на роботе, в частности, второй паз 264 используется для хранения нового блока для мытья полов, отсоединенного от второго модуля хранения 212. На краю боковой стенки второго паза 264 также предусмотрена конструкция перегородки 265 для предотвращения раздавливания блока для мытья полов, предназначенного для установки на роботе, ходовыми колесами робота и его выдвижения из второго паза 264, при этом успешно направляя блок для мытья полов, отсоединенный от второго модуля хранения 212, чтобы он упал во второй паз 264 для установки на роботе. Конкретный принцип и конструктивное исполнение второй упорной конструкции 263 примерно такие же, как у первой упорной конструкции 260, что повторяться здесь не будет. Понятно, что первая упорная конструкция 260 и вторая упорная конструкция 263 расположены параллельно, что соответствует первому модулю хранения 211 и второму модулю хранения 212 соответственно, при этом вместимость первого паза 261 и второго паза 264 примерно одинакова, количество блоков для мытья полов, которые могут быть размещены, примерно одинаково, и множество размещаемых блоков для мытья полов укладываются друг на друга. В данном варианте робот-уборщик 100 заезжает на базовую станцию для замены блока для мытья полов 310, в частности, нижняя пластина базовой станции 200 выступает за пределы очищаемой поверхности, а робот-уборщик должен подъехать к нижней пластине перед входом на базовую станцию 200, на нижней пластине базовой станции предусмотрены первый паз, второй паз, и первая упорная конструкция, вторая упорная конструкция, ввиду этого, нижняя пластина должна иметь определенную толщину. В частности, робот-уборщик 100 обладает определенной способностью преодолевать препятствия, которая влияет на настройку толщины нижней пластины и подвергается воздействию высоты ходового колеса робота-уборщика, вообще говоря, чем выше высота ходового колеса, тем лучше способность преодолевать препятствия. В данном варианте осуществления нижняя пластина меньше 20 мм, так что способность робота-уборщика преодолевать препятствия может обеспечить вход робота-уборщика 100 на базовую станцию. Таким образом можно гарантировать стабильность работы роботизированной системы чистки. В одном варианте осуществления, блок для мытья полов 310 более точно перемещается из второго модуля хранения 212 во вторую рабочую позицию 252, если блок для мытья полов 310 относительно точно помещен во вторую рабочую позицию, точность установки блока для мытья полов 310 на роботе-уборщике 100 может быть улучшена. В частности, вторая рабочая позиция 252 снабжена позиционирующим магнитом, а на блоке для мытья полов установлен магнитный элемент, когда блок для мытья полов падает из второго модуля хранения 212, положение блока для мытья полов 310 после падения будет исправлено под действием адсорбции позиционирующего магнита. В частности, вторая рабочая позиция 252 снабжена четырьмя позиционирующими магнитами, а блок для мытья полов 310 снабжен четырьмя магнитными элементами, и их положения соответствуют друг другу. В частности, блок для мытья полов 310 также снабжен магнитными элементами для установки блока для мытья полов на роботе-уборщике 100. В частности, в качестве магнитных элементов для выравнивания и магнитных элементов для установки можно использовать один набор магнитных элементов для реализации двойных функций, или два набора магнитных элементов для выравнивания и установки соответственно. В частности, когда используются два набора магнитных элементов, магнитные элементы, используемые для выравнивания, более слабые, чем те, которые используются для установки. В частности, когда блок для мытья полов 310 включает в себя два или более наборов магнитных элементов, между наборами магнитных элементов существуют противоинтерференционные структуры. В данном варианте осуществления носитель включает в себя модуль сбора блоков для мытья полов 231, модуль сбора блоков для мытья полов 231 также включает в себя первый поддерживающий компонент (см. рис. 11 - рис. 15), модуль сбора блоков для мытья полов 231 подбирает блок для мытья полов 310 и собирает его в первый модуль хранения 211. В данном варианте осуществления модуль сбора блоков для мытья полов установлен в соответствии с первой рабочей операции 251 базовой станции, робот-уборщик 100 отсоединяет блок для мытья полов 310 и помещает его в первую рабочую позицию 251, модуль сбора блоков для мытья полов 231 подбирает блок для мытья полов 310 из первой рабочей позиции 251 и помещает его в первый модуль хранения 211. Модуль сбора блоков для мытья полов 231 включает в себя подъемный механизм 232, который перемещается в два этапа в вертикальном направлении. На рис. 12 представлен пример модуля сбора блоков для мытья полов в данном варианте, а на рис. 13, 14 и 15 представлены примеры подъемного механизма 232. Подъемный механизм 232 может перемещаться в два этапа и, таким образом, имеет три состояния движения, на рис. 13, 14 и 15 соответственно показаны три состояния движения подъемного механизма 232, а именно сжатое состояние, первое растянутое состояние, второе растянутое состояние. В частности, ссылаясь на рис. 13 это состояние, когда подъемный механизм 232 не растянут, подъемный механизм в это время находится в сжатом состоянии; на рис. 14 представлено состояние частично растянутого подъемного механизма 232, в это время подъемный механизм находится в первом растянутом состоянии; а когда подъемный механизм 232 полностью растянут, см. рис. 15, в это время подъемный механизм находится во втором растянутом состоянии. Когда подъемный механизм 232 растягивается, он совершает движение в два этапа в одном направлении движения. В частности, подъемный механизм 232 находится в исходном состоянии, когда он не работает, и исходное состояние является первым растянутым состоянием. Когда подъемный механизм 232 находится в сжатом состоянии, подъемный механизм 232 имеет минимальную длину. Когда модуль сбора блоков для мытья полов должен собрать блок для мытья полов 310, подъемный механизм 232 растягивается до второго растянутого состояния, при этом подъемный механизм 232 имеет максимальную длину. Когда подъемный механизм 232 растянут до второго растянутого состояния, можно подобрать блок для мытья полов 310. Ссылаясь на рис. 11, когда модуль сбора блоков для мытья полов работает, чтобы собрать блок для мытья полов 310, подъемный механизм 232 растягивается до второго растянутого состояния, чтобы подобрать блок для мытья полов 310. После того, как подъемный механизм 232 подбирает блок для мытья полов 310, сначала укоротить растянутое состояние подъемного механизма 232 из второго растянутого состояния до первого растянутого состояния, а затем из первого растянутого состояния до сжатого состояния, когда подъемный механизм 232 укорочен до сжатого состояния, под его действием блок для мытья полов 310 собирается в первый модуль хранения 211. В данном варианте осуществления, когда модуль сбора блоков для мытья полов собирает блок для мытья полов 310, модуль сбора блоков для мытья полов 231 приводит блок для мытья полов 310 в перемещение в вертикальном направлении, чтобы передать блок для мытья полов 310, отсоединенный от основного корпуса робота-уборщика 100, в первый модуль хранения 211. В данном варианте осуществления направление движения блока для мытья полов 310 перпендикулярно направлению движения робота-уборщика 100 на базовую станцию 200. В частности, когда подъемный механизм 232 перемещается вертикально вниз, можно подобрать блок для мытья полов 310; а когда подъемный механизм 232 перемещается вертикально вверх, блок для мытья полов 310 собирается в первый модуль хранения 211. Благодаря конструктивному исполнению модуля сбора блоков для мытья полов, модуль сбора блоков для мытья полов приводит блок для мытья полов 310 в перемещение в вертикальном направлении, чтобы собрать блок для мытья полов 310 в первый модуль хранения. Благодаря сбору блока для мытья полов 310 за счет вертикального движения блока для мытья полов 310, базовая станция 200 стала компактной и занимает небольшую площадь. В то же время, благодаря конструктивному исполнению подъемного механизма 232, способного перемещаться в два этапа, высота базовой станции 200 в вертикальном направлении уменьшается, а общие размеры базовой станции стали меньше. В данном варианте осуществления подъемный механизм 232 также включает в себя узел подборки. В данном варианте осуществления узел подборки включает в себя адсорбционный узел 233, который расположен в конце подъемного механизма и поднимает блок для мытья полов 310 с помощью адсорбционного узла 233. В данном варианте осуществления адсорбционный узел 233 включает в себя магнитный элемент для адсорбции блока для мытья полов 310, взаимодействуя с магнитным элементом 314 задней пластины 311 блока для мытья полов. В частности, в данном варианте осуществления магнитный элемент включает в себя магнит. В частности, адсорбционный узел 233 расположен в комбинации с подъемным механизмом 232, когда модуль сбора блоков для мытья полов должен собрать блок для мытья полов 310, подъемный механизм растягивается до второго растянутого состояния, адсорбционный узел 233, расположенный в конце подъемного устройства, приближается к блоку для мытья полов 310 с растяжением подъемного механизма, адсорбируя блок для мытья полов 310 под действием магнитного поля, или адсорбционный узел 233 контактирует с блоком для мытья полов 310, адсорбируя блок для мытья полов 310 под действием магнитного поля. В данном варианте осуществления блок для мытья полов 310 снабжен четырьмя магнитными элементами 314, а модуль сбора блоков для мытья полов снабжен четырьмя подъемными механизмами 232, на каждом подъемном механизме 232 предусмотрен один магнитный элемент, а четыре подъемных механизма 232 в модуле сбора блоков для мытья полов растягиваются и сжимаются синхронно. Магнитный элемент на подъемном механизме 232 соответствует магнитному элементу 314 в блоке для мытья полов 310, чтобы поднять блок для мытья полов 310. Когда модуль сбора блоков для мытья полов должен собрать блок для мытья полов, подъемный механизм 232 растягивается, чтобы адсорбировать блок для мытья полов 310 с помощью адсорбционного узла 233, а адсорбируемый блок для мытья полов 310 представляет собой грязный блок для мытья полов 310, отсоединенный от основного корпуса робота-уборщика 100 после определенного периода работы. Робот-уборщик 100 перемещается в первую рабочую позицию 251 базовой станции 200, отсоединяет грязный блок для мытья полов 310 от основного корпуса робота-уборщика 100. Однако, когда робот-уборщик 100 отсоединяет блок для мытья полов 310, он не может гарантировать, что блок для мытья полов 310 будет всегда точно выровнен с модулем сбора блоков для мытья полов, соответственно, расположение магнитного элемента в модуле сбора блоков для мытья полов не всегда полностью совпадает с магнитным элементом 314 на блоке для мытья полов 310, как уже упоминалось ранее, что в других вариантах осуществления способ подключения и способ сбора блока для мытья полов 310 могут быть распространенными способами. В данном варианте осуществления предусмотрены магнитные элементы, из-за взаимного притяжения магнитных элементов, даже если положение блока для мытья полов 310 не полностью совмещено, магнитные элементы имеют функцию калибровки. Положительный эффект такого конструктивного исполнения заключается в том, что благодаря адсорбции магнитных элементов, процесс сбора блока для мытья полов 310 может быть откалиброван, обеспечивая повышенную стабильность работы модуля сбора блоков для мытья полов. В данном варианте осуществления согласно рис. 12, модуль сбора блоков для мытья полов 231 включает в себя упор 234, в частности, первый поддерживающий компонент включает в себя упор 234 для поддерживания блока для мытья полов 310 в первом модуле хранения 211, как показано стрелкой на рис. 12, упор 234 может вращаться против часовой стрелки в вертикальной плоскости, когда упор подвергается сжимающей силе, направленной вверх, когда упор не подвергается сжимающей силе, упор восстанавливается в исходное положение, а когда упор 234 находится в исходном положении, он поддерживает блок для мытья полов в первом модуле хранения 211. В частности, конец подъемного механизма 232 может подниматься и опускаться в вертикальном направлении с растягиванием /сжатием подъемного механизма 232. Когда подъемный механизм 232 непрерывно растягивается, конец подъемного механизма опускается в вертикальном направлении, так что адсорбционный узел, расположенный в конце подъемного механизма, приближается к собираемому блоку для мытья полов 310, а когда подъемный механизм 232 сжимается, конец подъемного механизма поднимается в вертикальном направлении. В частности, конец подъемного механизма 232 также может вращаться, как показано стрелкой на рис. 12, конец подъемного механизма 232 может вращаться против часовой стрелки и вверх, когда он сжимается, и восстанавливаться в исходное состояние, когда он не сжимается. Когда модуль сбора блоков для мытья полов должен собрать блок для мытья полов 310, подъемный механизм 232 растягивается вниз, чтобы адсорбирующий компонент, расположенный на конце подъемного механизма, адсорбировал блок для мытья полов, подъемный механизм приводит в движение блок для мытья полов вверх, а упор 234 сжимается блоком для мытья полов 310 и вращается вверх против часовой стрелки, так что блок для мытья полов помещается в первый модуль хранения 211. Когда упор больше не сжимается, он будет восстановлен в исходное состояние для поддерживания блока для мытья полов. Когда подъемный механизм 232 снова собирает блок для мытья полов 310, подъемный механизм растягивается, его конец сжимается блоком для мытья полов в первом модуле хранения 211 и вращается вверх, а затем восстанавливается в исходное состояние после прохождения через отверстие в первом модуле хранения. Когда подъемный механизм растягивается до второго растянутого состояния, он соединяется с блоком для мытья полов 310, а подъемный механизм снова сжимается вверх и сжимает при этом упор, так что блок для мытья полов снова помещается в первый модуль хранения 211. В данном варианте осуществления ссылаясь на рис. 16–18, модуль подачи блоков для мытья полов 236 взаимодействует с вторым модулем хранения 212, забирая блок для мытья полов 310 из второго модуля хранения 212 и передавая на базовую станцию во вторую рабочую позицию 252 для установки на роботе-уборщике 100, во второй рабочей позиции 252 робот-уборщик 100 устанавливает блок для мытья полов 310, передаваемый от модуля подачи блоков для мытья полов. На рисунках 16-18 представлено конструктивное исполнение модуля подачи блоков для мытья полов и движение блока для мытья полов 310 в данном варианте осуществления. На рисунках 17-18 представлено конструктивное исполнение модуля подачи блоков для мытья полов в данном варианте осуществления. В частности, модуль подачи блоков для мытья полов может приводить в действие блок для мытья полов 310 для достижения первого состояния фиксации блока для мытья полов 310 и второго состояния высвобождения блока для мытья полов 310. Модуль подачи блоков для мытья полов включает в себя второй поддерживающий компонент, который используется для поддерживания блока для мытья полов во втором модуле хранения, в частности, второй поддерживающий компонент включает в себя слайдер, блок передачи также включает в себя передаточный механизм 244, который приводится в действие двигателем, слайдер 242 расположен на передаточном механизме 244 и перемещается в ответ на движение передаточного механизма 244. Передаточный механизм 244 приводит слайдер 242 в перемещение из первого положения во второе положение, при этом, когда слайдер 242 находится в первом положении, блок для мытья полов 310 хранится во втором модуле хранения 212; а когда слайдер 242 находится во втором положении, блок для мытья полов 310 высвобождается из второго модуля хранения 212. В данном варианте осуществления передаточный механизм 244 включает в себя синхронный ремень, который совершает возвратно-поступательное движение в заданном направлении в ответ на действие двигателя. В данном варианте осуществления согласно рис. 17–18 слайдер 242 включает выступ 243, когда слайдер 242 находится в первом положении, блок для мытья полов 310 поддерживается с помощью выступа 243, чтобы зафиксировать блок для мытья полов 310 во втором модуле хранения 212. когда слайдер 242 находится во втором положении, выступ 243 на слайдере 242 взаимодействует с выемкой 313 на блоке для мытья полов 310, так что блок для мытья полов 310 высвобождается из второго модуля хранения 212. В частности, на двух сторонах блока для мытья полов 310 предусмотрена выемка 313, когда передаточный узел приводит слайдер 242 в движение, выступ 243 на слайдере 242 перемещается вместе с слайдером 242. Когда выступ 243 на слайдере 242 только достигает выемки 313 на блоке для мытья полов 310, выпадает блок для мытья полов 310 через второй поддерживающий компонент модуля подачи блоков для мытья полов. В частности, второй поддерживающий компонент модуля подачи блоков для мытья полов включает в себя несколько слайдеров 242, и количество слайдеров 242 связано с количеством выемок 313 на блоке для мытья полов 310. В частности, на каждой стороне синхронного шкива предусмотрено по два слайдера 242, соответственно, на каждой кромке с двух сторон блока для мытья полов 310 предусмотрено по две выемки 313, а на каждом слайдере 242 предусмотрено по одному выступу 243, когда каждый выступ 243 совпадает с каждой выемкой 313, высвобождается блок для мытья полов 310. В частности, чтобы гарантировать, что выступ 243 на слайдере 242 точно соответствует выемке 313 на блоке для мытья полов 310, при установке слайдеров 242 нужно обеспечить постоянное расстояние между двумя слайдерами 242, а также постоянное расстояние между двумя соседними выемками 313 на блоке для мытья полов 310, при этом расстояние между слайдерами 242 равно расстоянию между двумя соседними выемками 313 на блоке для мытья полов 310. Когда выступы 243 на двух слайдерах 242 на каждой стороне второго поддерживающего компонента модуля подачи блоков для мытья полов совпадают с выемками 313 на каждой стороне блока для мытья полов 310, высвобождается блок для мытья полов 310. Когда второй поддерживающий компонент модуля подачи блоков для мытья полов высвобождает блок для мытья полов, робот-уборщик 100 может устанавливать только один блок для мытья полов 310 каждый раз, в то время как второй модуль хранения 212 должен хранить несколько блоков для мытья полов 310, чтобы предоставлять роботу-уборщику 100 блок для мытья полов для замены в разное время, следовательно, необходимо следить за тем, чтобы модуль подачи блоков для мытья полов каждый раз предоставлял роботу-уборщику 100 только один блок для мытья полов 310. Для того чтобы модуль подачи блоков для мытья полов предоставлял роботу-уборщику 100 только один блок для мытья полов каждый раз, в данном варианте осуществления второй модуль хранения 212 может хранить множество блоков для мытья полов 310, так что базовая станция 200 может стабильно предоставлять роботу-уборщику блок для мытья полов 310 в течение длительного времени. Если положение выемки 313 на каждом блоке для мытья полов полностью совпадает, то когда слайдер 242 перемещается до выемки 313, модуль подачи блоков для мытья полов может высвободить несколько блоков для мытья полов 310 одновременно. Следовательно, в данном варианте осуществления положение выемки 313 на каждом блоке для мытья полов 310 не полностью одинаково, поскольку положение выемки 313 на каждом блоке для мытья полов 310 не полностью совпадает, то когда слайдер 242 достигает выемки 313 одного блока для мытья полов 310, этот блок для мытья полов 310 высвобождается через второй поддерживающий компонент модуля подачи блоков для мытья полов, в то же время как соседний с ним другой блок для мытья полов 310 закреплен выступом 243 слайдера 242 и не будет высвобождаться при высвобождении предыдущего блока для мытья полов 310. Как показано на рис. 28–30, в другом конкретном варианте осуществления второй поддерживающий компонент модуля подачи блоков для мытья полов включает в себя первый набор телескопических механизмов перегородки 270 и второй набор телескопических механизмов перегородки 280, расположенных под первым набором телескопических механизмов перегородки 270, и блок передачи также включает в себя механизм передачи, который приводит в движение первый набор телескопических механизмов перегородки 270 и второй набор телескопических механизмов перегородки 280, и механизм передачи соединен с двигателем, который приводит в действие механизм передачи. Под действием передаточного механизма первый набор телескопических механизмов перегородки 270 переключается между выдвинутым положением и сжатым положением для фиксации и высвобождения блока для мытья полов, а механизм передачи приводит в действие второй набор телескопических механизмов перегородки 280 для переключения между выдвинутым положением и сжатым положением для фиксации блока для мытья полов 310, высвобожденного от первого набора телескопических механизмов перегородки 270, и высвобождения по крайней мере одного блока для мытья полов, таким образом, осуществляя постепенное высвобождение блока для мытья полов, причем в данном варианте осуществления настоящего изобретения в понятие «высвобождение по крайней мере одного блока для мытья полов» входит высвобождение первого блока для мытья полов, ближайшего к нижней пластине, то есть блок для мытья полов, падающий первым, в других вариантах осуществления также можно высвободить множество блоков для мытья полов по мере необходимости. Постепенное высвобождение включает высвобождение на первой ступени и высвобождение на второй ступени, которые будут подробно описаны ниже. В данном варианте осуществления механизм передачи состоит из зубчатой передачи и реечной конструкции, а в других вариантах осуществления также может быть червячной конструкцией. Как показано на рис. 31, в данном варианте осуществления первый набор телескопических механизмов перегородки 270 расположен над вторым набором телескопических механизмов перегородки 280, в частности, оба набора параллельны полу, так что блок для мытья полов 310 может быть устойчиво закреплен без проскальзывания, А блок для мытья полов 310 может быть стабильно высвобожден во второй паз 264 на базовой станции 200, когда высвобождается блок для мытья полов 310, разумеется, оба набора телескопических механизмов перегородки могут быть не параллельны друг другу, если можно эффективно обеспечить фиксацию и высвобождение блока для мытья полов 310. Понятно, что когда первый набор телескопического механизма перегородки 270 находится в выдвинутом положении, он может фиксировать множество блоков для мытья полов 310, хранящихся во втором модуле хранения 212. Как показано на рис. 31, когда механизм передачи приводит первый набор телескопических механизмов перегородки 270 в выдвинутое положение, множество блоков для мытья полов 310 укладываются друг на друга над выдвинутым положением, то есть из-за поддерживающего эффекта первого набора телескопических механизмов перегородки 270, первый набор телескопических механизмов перегородки 270 может фиксировать множество блок для мытья полов 310 в выдвинутом положении, множество блоков для мытья полов включает в себя по крайней мере один. Как показано на рис. 32, когда механизм передачи приводит первый набор телескопических механизмов перегородки 270 в перемещение из выдвинутого положения в сжатое положение, высвобождается и опускается блок для мытья полов 310, фиксированный над выдвинутым положением, в это время второй набор телескопических механизмов перегородки 280 перемещается в выдвинутое положение для фиксации блока для мытья полов 310, опустившегося сверху, таким образом завершается высвобождение блока для мытья полов 310 на первой ступени. Как показано на рис. 33, когда второй набор телескопических механизмов перегородки 280 перемещается из выдвинутого положения в сжатое положение, опускается множество блоков блок для мытья полов 310, закрепленных над вторым набором телескопических механизмов перегородки 280, в это время первый набор телескопических механизмов перегородки 270 перемещается из сжатого положения в выдвинутое положение. В процессе выдвижения, первый набор телескопических механизмов перегородки 270 может быть вставлен в промежуток между первым блоком для мытья полов, опустившимся первым, и вторым блоком для мытья полов, для блокировки блока для мытья полов, расположенного над первым блоком для мытья полов, так что только первый блок для мытья полов высвобождается во второй паз 264 базовой станции 200, остальные блоки для мытья полов все еще закреплены над первым набором телескопического механизма перегородки 270, в это время, завершается высвобождение блока для мытья полов на второй степени, и этот цикл повторяется, реализуя постепенное высвобождение блока для мытья полов 310, так что второй модуль хранения 212 базовой станции 200 каждый раз высвобождает только один блок для мытья полов 310 для установки на роботе-уборщике. Понятно, что соотношение между расстоянием d от первого набора телескопических механизмов перегородки 270 до второго набора телескопических механизмов перегородки 280 в вертикальном направлении и толщиной n каждого блока для мытья полов удовлетворяет условиям, что n Механизм передачи может как приводить в движение первый набор телескопических механизмов перегородки 270 и второй набор телескопических механизмов перегородки 280 по отдельности, так и приводить в движение первый набор телескопических механизмов перегородки 270 и второй набор телескопических механизмов перегородки 280 синхронно. Конкретная форма не ограничена. В данном варианте осуществления настоящего изобретения механизм передачи сцепляется одновременно с первым набором телескопических механизмов перегородки 270 и вторым набором телескопических механизмов перегородки 280 через зубчатую передачу и реечную конструкцию. Когда механизм передачи двигается, первый набор телескопических механизмов перегородки 270 и второй набор телескопических механизмов перегородки 280 двигаются синхронно, и переключение между выдвинутым положением и сжатым положением осуществляется посредством прямого и обратного вращения двигателя. Такая компоновка позволяет обеспечить строгий и стабильный процесс высвобождения блока для мытья полов на каждой ступени, и избежать ситуации, когда первый набор телескопических механизмов перегородки 270 двигается, но второй набор телескопических механизмов перегородки 280 не работает, в результате чего одновременно высвобождаются несколько блоков для мытья полов на нижнюю пластину. Как показано на рис. 29, первый набор телескопических механизмов перегородки 270 и второй набор телескопических механизмов перегородки 280 соответственно содержат множество телескопических перегородок, расположенных на боковых стенках второго модуль хранения, то есть первый набор телескопических перегородок 271 и второй набор телескопических перегородок 281 содержат множество телескопических перегородок, понятно, что множество телескопических перегородок расположено по крайней мере на двух боковых стенках второго модуля хранения 212, только установка телескопических перегородок по крайней мере на двух боковых стенках сможет фиксировать блок для мытья полов 310, в конкретном варианте осуществления в понятие «по крайней мере две боковые стенки» входят две противоположные боковые стенки, например, на рис. 29 телескопические перегородки предусмотрены на передней и задней стенках базовой станции 200. Разумеется, в других модифицированных вариантах осуществления телескопические перегородки могут быть также размещены на левой и правой стенках базовой станции 200, либо для повышения устойчивости закрепления блока для мытья полов на телескопической конструкции, телескопические перегородки также могут быть расположены на трех или четырех боковых стенках второго модуля хранения. В данном варианте осуществления первый набор телескопических механизмов перегородки 270 включает в себя четыре телескопических перегородки 271, а второй набор телескопических механизмов перегородки 280 также включает в себя четыре телескопических перегородки 281, конечно, количество первых наборов телескопических перегородок 271 и вторых наборов телескопических перегородок 281 также может быть разным. В данном варианте осуществления четыре телескопических перегородки 271 первого набора телескопических механизмов перегородки и четыре телескопических перегородки 281 второго набора телескопических механизмов перегородки расположены симметрично в вертикальном направлении, и несколько перегородок каждого набора телескопических перегородок находятся на одной горизонтальной плоскости для повышения устойчивости конструкции. На рис. 48 представлен вид сверху на базовую станцию робота-уборщика в варианте осуществления, на рис. 49 представлен вид спереди извлечения первого блока для мытья полов в варианте осуществления базовой станции робота-уборщика настоящего изобретения, на рис. 50 представлен вид спереди высвобождения второго блока для мытья полов в варианте осуществления базовой станции робота-уборщика настоящего изобретения, как показано на рис. 48–50, в одном варианте осуществления, ссылаясь на рис. 48–50, базовая станция робота-уборщика может включать в себя: модуль сбора блоков для мытья полов, включающий в себя: первую подъемную раму блока для мытья полов, которая может подняться под действием приводной части, тем самым неся и перемещая блок для мытья полов из первой рабочей позиции к первому модулю хранения, когда первая подъемная рама блока для мытья полов поднимается, переносимый ей блок для мытья полов может проходить через первый поддерживающий компонент; а когда первая подъемная рама блока для мытья полов опускается, первый поддерживающий компонент может поддерживать данный блок для мытья полов, чтобы он не опускался вместе с первой подъемной рамой блока для мытья полов; и, модуль подачи блоков для мытья полов, включающий в себя вторую подъемную раму блока для мытья полов, вторая подъемная рама блока для мытья полов может опускаться под действием приводной части, тем самым неся и перемещая блок для мытья полов из второго модуля хранения ко второй рабочей позиции, когда вторая подъемная рама блока для мытья полов опускается, она может направить вниз по крайней мере один блок для мытья полов из второго модуля хранения, а второй поддерживающий компонент может поддерживать блок для мытья полов во втором модуле хранения и опускать по крайней мере один блок для мытья полов из второго модуля хранения на вторую подъемную раму блока для мытья полов. Когда блок для мытья полов 310, используемый роботом-уборщиком 100 для мытья полов, подвергается замене, достигая определенной степени или определенного времени, робот переезжает на базовую станцию 200. В это время внизу находится первая подъемная рама блока для мытья полов 1, робот перемещается в рабочую позицию базовой станции 200, блок для мытья полов 310 робота выравнивается с первой подъемной рамой блока для мытья полов 1, а затем высвобождается блок для мытья полов 310 из робота, отсоединенный от робота-уборщика, а высвобожденный блок для мытья полов 310, отсоединенный от робота-уборщика, опускается в первую подъемную раму блока для мытья полов 1. После этого робот покидает первую подъемную раму блока для мытья полов 1 или базовую станцию, в частности, робот заезжает в первую рабочую позицию базовой станции, отсоединяет блок для мытья полов 310 и размещает блок для мытья полов 310 на первую подъемную раму блока для мытья полов 1. Затем под действием приводной части 5 первая подъемная рама блока для мытья полов 1 поднимается, первая подъемная рама блока для мытья полов 1 поддерживает блок для мытья полов 310, отсоединенный от робота-уборщика, и поднимая его вверх до первого поддерживающего компонента 2, который поддерживает блок для мытья полов 310, отсоединенный от робота-уборщика, чтобы блок для мытья полов не опускался вместе с первой подъемной рамой блока для мытья полов 1. Первая подъемная рама блока для мытья полов 1 может опуститься под действием приводной части 5, чтобы подготовиться к следующему прибытию робота. Во второй модуль хранения заранее уложено множество блоков для мытья полов 310 на случай замены, которые поддерживаются вторым поддерживающим компонентом 4. Когда опускается вторая подъемная рама блока для мытья полов 3, по крайней мере один блок для мытья полов 310 опускается на вторую подъемную раму блока для мытья полов 3 из второго поддерживающего компонента 4 блока хранения. Когда вторая подъемная рама блока для мытья полов 3 продолжает опускаться, вторая подъемная рама блока для мытья полов 3 и по крайней мере один опустившийся на нее блок для мытья полов 310 опускается до дна. В это время робот может перемещаться выше второй подъемной рамы блока для мытья полов и автоматически устанавливать блок для мытья полов 310, находящийся на второй подъемной раме блока для мытья полов, на его дно. В частности, при установке блока для мытья полов 310 робот-уборщик 100 заезжает во вторую рабочую позицию базовой станции и устанавливает блок для мытья полов, размещенный на второй подъемной раме блока для мытья полов 3, на роботе-уборщике 100. Автоматическая замена блока для мытья полов, используемого роботом для мытья полов, осуществляется в соответствии с описанным выше процессом. Когда только что установленный блок для мытья полов 310 станет грязным, можно повторять вышеуказанные шаги. Первый поддерживающий компонент 2 может поддерживать множество блоков для мытья полов 310. Чтобы лучше ознакомиться с базовой станцией 200 робота-уборщика, изложенной в настоящей заявке, далее проводится дальнейшее толкование и объяснение. Как показано на рис. 48–50, базовая станция 200 робота-уборщика может включать в себя: модуль сбора блоков для мытья полов, модуль подачи блоков для мытья полов и приводную часть 5. При этом модуль сбора блоков для мытья полов включает в себя первую подъемную раму блока для мытья полов 1, и первый поддерживающий компонент 2. Первая подъемная рама блока для мытья полов 1 может подниматься и опускаться в вертикальном направлении, первая подъемная рама блока для мытья полов 1 может нести блок для мытья полов 310, отсоединенный от робота-уборщика, и приводить в подъем блок для мытья полов 310, отсоединенный от робота-уборщика. В одном из возможных вариантов осуществления блок передачи на базовой станции включает в себя по крайней мере одну направляющую штангу, причем первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 расположены на направляющей штанге и могут скользить по направляющей штанге для осуществления подъема и спуска. В частности, направляющая штанга по крайней мере включает в себя первую направляющую штангу и вторую направляющую штангу. В частности, модуль сбора блоков для мытья полов может включать в себя по крайней мере одну первую направляющую штангу 6, которая простирается в вертикальном направлении, а подъемная рама блока для мытья полов 310, отсоединенного от робота-уборщика, расположена на первой направляющей штанге 6 и может скользить по первой направляющей штанге 6 для осуществления подъема и спуска. В частности, для фиксации первой направляющей штанги 6 базовая станция робота-уборщика может включать в себя нижнюю пластину 250, а первая направляющая штанга 6 соединяется с нижней пластиной 250. На первой подъемной раме блока для мытья полов 1 выполнены сквозные отверстия, через которые первая подъемная рама блока для мытья полов 1 надевается на первую направляющую штангу 6 и может скользить по первой направляющей штанге 6 для осуществления подъема и спуска. В одном предпочтительном варианте осуществления имеется множество первых направляющих штанг 6, и в различных местах первой подъемной рамы блока для мытья полов 1 выполнено множество сквозных отверстий. Например, когда первая подъемная рама блока для мытья полов 1 имеет примерно прямоугольную форму в горизонтальной плоскости, можно иметь четыре сквозных отверстия, которые соответственно выполнены по углам прямоугольника. Таким образом, когда первая подъемная рама блока для мытья полов 1 скользит по первой направляющей штанге 6, обеспечивается устойчивость всей первой подъемной рамы блока для мытья полов 1, и в то же время обеспечивая бесперебойный подъем и спуск. Когда первая подъемная рама блока для мытья полов 1 опускается вниз на дно по первой направляющей штанге 6, то есть опускается на нижнюю пластину 250, робот, который должен заменить блок для мытья полов, подъезжает к первой подъемной раме блока для мытья полов 1. Робот автоматически отсоединяет свой грязный блок для мытья полов снизу, а отсоединенный блок для мытья полов опускается на нижнюю пластину, в частности, робот-уборщик подходит к первой рабочей позиции 251, отсоединяет блок для мытья полов и помещает его на первую рабочую позицию на нижней пластине, то есть блок для мытья полов 310, отсоединенный от робота-уборщика, опускается на первую подъемную раму блока для мытья полов 1. Как показано на рис. 48–50, первый поддерживающий компонент 2 может ограничить блок для мытья полов 310, отсоединенный от робота-уборщика на первой подъемной раме блока для мытья полов 1, чтобы данный блок для мытья полов 310 не опускался вместе с первой подъемной рамой блока для мытья полов 1. В одном возможном варианте осуществления первый поддерживающий компонент 2 может включать в себя ограничительная деталь 21, способную вращаться; деталь сброса 22, приводящую ограничительную деталь 21 в исходное состояние. Ограничительная деталь 21, предпочтительно, выполнена с возможностью вращения в вертикальной плоскости. Вообще говоря, в качестве детали сброса 22 можно использовать пружину кручения или пружину. Когда используется пружина кручения, пружина кручения и ограничительная деталь 21 надеваются на один и тот же вращающийся вал, и пружина кручения может упираться на ограничительную деталь 21 и вращающийся вал, или упираться на ограничительную деталь 21 и другие находящиеся поблизости неподвижные детали и узлы. Когда используется пружина, ограничительная деталь 21 надевается на один вращающийся вал, один конец пружины соединяется с ограничительной деталью 21, а другой конец пружины соединяется с другими близлежащими неподвижными деталями и узлами. Ограничительная деталь 21 имеет по крайней мере два состояния. Когда ограничительная деталь 21 находится в первом состоянии, при подъеме первая подъемная рама блока для мытья полов 1 может заставить блок для мытья полов 310, находящийся на первой подъемной раме блока для мытья полов 1, пройти через ограничительную деталь 21; когда ограничительная деталь 21 находится во втором состоянии, ограничительная деталь 21 может поддерживать данный блок для мытья полов 310. Как правила, ограничительная деталь 21 находится во втором состоянии. Когда первая подъемная рама блока для мытья полов 1 поднимается до ограничительной детали 21, первая подъемная рама блока для мытья полов 1 упирается в ограничительная деталь 21, заставляя ограничительную деталь 21 вращаться, ограничительная деталь 21 вращается, преодолевая усилие детали сброса 22, после чего ограничительная деталь 21 оказывается в первом состоянии, при этом первая подъемная рама блока для мытья полов 1 может подниматься за пределы ограничительной детали 21. После этого ограничительная деталь 21 восстанавливается во второе состояние за счет усилия детали сброса 22. Когда первая подъемная рама блока для мытья полов 1 опускается, блок для мытья полов 310, отсоединенный от робота-уборщика, на первой подъемной раме блока для мытья полов 1, будет поддерживаться ограничительной деталью 21, так что блок для мытья полов 310 не будет опускаться, он извлекается и укладывается на ограничительную деталь 21, таким образом реализуя хранение грязного блока для мытья полов 310, отсоединенного от робота-уборщика. В одном возможном варианте осуществления может быть множество ограничительных деталей 21 и согласованных деталей сброса 22, множество ограничительных деталей 21 могут поддерживать различные места на краю блока для мытья полов 310, отсоединенного от робота-уборщика, тем самым обеспечивая устойчивость поддерживания блока для мытья полов 310, отсоединенного от робота-уборщика, и предотвращая опрокидывание блока для мытья полов 310, отсоединенного от робота-уборщика. В одном возможном варианте осуществления базовая станция 200 робота-уборщика может включать в себя: первую опору 330 для извлечения блока для мытья полов, простирающуюся в вертикальном направлении. Ограничительная деталь 21 и деталь сброса 22 могут быть установлены на первой опоре 330 для извлечения блока для мытья полов, которая расположена сбоку от блока для мытья полов 310, отсоединенного от робота-уборщика и уложенного на ограничительную деталь 21, когда на ограничительную деталь 21 уложено множество грязных блоков для мытья полов 310, отсоединенных от робота-уборщика, можно предотвратить опрокидывание блоков для мытья полов 310, уложенных на ограничительную деталь 21 и отсоединенных от робота-уборщика. Как показано на рис. 48–50, модуль подачи блоков для мытья полов может включать в себя вторую подъемную раму блока для мытья полов 3, поддерживающие компоненты включают в себя второй поддерживающий компонент 4, модуль подачи блоков для мытья полов включает в себя второй поддерживающий компонент 4. При этом вторая подъемная рама блока для мытья полов 3 может подниматься и опускаться в вертикальном направлении. Когда вторая подъемная рама блока для мытья полов 3 опускается, она может приводить в спуск как минимум один блок для мытья полов 310. Первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 могут быть расположены рядом друг с другом. В одном возможном варианте осуществления, как показано на рис. 49 и рис. 50, блок передачи также включает в себя по крайней мере одну вторую направляющую штангу 7, которая простирается в вертикальном направлении, а вторая подъемная рама блока для мытья полов 3 расположена на второй направляющей штанге 7 и может скользить по второй направляющей штанге 7 для осуществления подъема и спуска. Для фиксации второй направляющей штанги 7 первая направляющая штанга 6 может быть соединена с нижней пластиной 250. На второй подъемной раме блока для мытья полов 3 выполнены сквозные отверстия, через которые вторая подъемная рама блока для мытья полов 3 надевается на вторую направляющую штангу 7 и может скользить по второй направляющей штанге 7 для осуществления подъема и спуска. В одном предпочтительном варианте осуществления, как показано на рис. 49 и рис. 50, имеется множество вторых направляющих штанг 7, и в различных местах второй подъемной рамы блока для мытья полов 3 выполнено множество сквозных отверстий. Например, когда вторая подъемная рама блока для мытья полов 3 имеет примерно прямоугольную форму в горизонтальной плоскости, можно быть четыре сквозных отверстия, которые соответственно выполнены по углам прямоугольника. Таким образом, когда вторая подъемная рама блока для мытья полов 3 скользит по второй направляющей штанге 7, обеспечивается устойчивость всей второй подъемной рамы блока для мытья полов 3, и в то же время обеспечивая бесперебойный подъем и спуск. Когда вторая подъемная рама блока для мытья полов 3, имеющий по крайней мере один блок для мытья полов 310, полученный из второго модуля хранения 212, опускается вниз на дно по второй направляющей штанге 7, то есть опускается на нижнюю пластину 250, робот, который должен установить чистый блок для мытья полов, подъезжает ко второй подъемной раме блока для мытья полов, автоматически устанавливает на своем дне блок для мытья полов 310, находящийся на второй подъемной раме блока для мытья полов, далее покидает вторую подъемную раму блока для мытья полов и продолжает установленные операции уборки. На рис. 52 представлено схематическое изображение второго поддерживающего компонента в варианте осуществления базовой станции робота-уборщика в соответствии с настоящим изобретением, как показано на рис. 49, рис. 50 и рис. 52, второй поддерживающий компонент 4 может включать в себя зажимной соединитель 41, который может вращаться; смещающий элемент 42, приводящий зажимной соединитель 41 в исходное положение. Зажимной соединитель 41 вращается примерно в горизонтальном направлении. Зажимной соединитель 41 может быть установлен на других неподвижных деталях и узлах поблизости, например, базовая станция 200 робота-уборщика может включать в себя: неподвижную раму 500, зажимной соединитель 41 и смещающий элемент 42 установлены на неподвижной раме 500. Неподвижная рама 500 может быть соединена с нижней пластиной 250 для осуществления фиксации положения. Вообще говоря, в качестве смещающего элемента 42 можно использовать пружину кручения или пружину. Когда используется пружина кручения, пружина кручения и зажимной соединитель 41 надеваются на один и тот же вращающейся вал, и пружина кручения может упираться на зажимной соединитель 41 и вращающийся вал, или упираться на зажимной соединитель 41 и другие находящиеся поблизости неподвижные детали и узлы, такие как неподвижная рама 500. Когда используется пружина, зажимной соединитель 41 надевается на вращающийся вал, один конец пружины соединяется с зажимным соединителем 41, а другой конец пружины соединяется с другими близлежащими неподвижными деталями и узлами, такими как неподвижная рама 500. Зажимной соединитель 41 имеет по крайней мере два положения. Когда зажимной соединитель 41 находится в первом положении, при опускании вторая подъемная рама блока для мытья полов 3 может заставить по крайней мере один блок для мытья полов 310, установленный на зажимном соединителе 41, оторваться от зажимного соединителя 41; а когда зажимной соединитель 41 находится во втором положении, зажимной соединитель 41 может поддерживать блок для мытья полов 310. Для того, чтобы блок для мытья полов 310, помещенный на зажимной соединитель 41, оторвался от зажимного соединителя 41, когда вторая подъемная рама блока для мытья полов 3 опускается, как показано на рис. 52, второй поддерживающий компонент 4 может включать в себя: направляющий элемент 43, установленный на второй подъемной раме блока для мытья полов 3 и имеющий направляющую поверхность 431, между направляющей поверхностью 431 и вертикальным направлением существует заранее установленный угол, который больше 0 градусов но меньше 90 градусов. Когда вторая подъемная рама блока для мытья полов 3 опускается, направляющая поверхность 431 упирается в один конец зажимного соединителя 41, и один конец зажимного соединителя 41 отклоняется под действием направляющей поверхности 431, заставляя зажимной соединитель 41 вращаться, чтобы другой конец зажимного соединителя 41 оторвался от блока для мытья полов 310. В это время среди сложенных блоков для мытья полов 310 по крайней мере один самый нижний блок для мытья полов 310 упадет на вторую подъемную раму блока для мытья полов 3. В указанном выше режиме зажимной соединитель 41 вращается в горизонтальной плоскости за счет вертикального перемещения второй подъемной рамы блока для мытья полов 3 и взаимодействия направляющей поверхности 431. Когда вторая подъемная рама блока для мытья полов 3 продолжает опускаться и один конец зажимного соединителя 41 отделяется от направляющей поверхности 431, зажимной соединитель 41 вращается под действием смещающего элемента 42, чтобы другой конец зажимного соединителя 41 приблизился к блоку для мытья полов 310. В это время другой конец зажимного соединителя 41 вставлен по крайней мере между первым блоком для мытья полов 310 и вторым блоком для мытья полов 310 снизу на второй подъемной раме блока для мытья полов 3, так что зажимной соединитель 41 может поддерживать второй блок для мытья полов 310 и находящиеся выше его блоки для мытья полов 310. Первый блок для мытья полов 310 размещается на второй подъемной раме блока для мытья полов 3, и может продолжать спускаться вместе с второй подъемной рамой блока для мытья полов 3 на дно. В это время робот, отсоединивший грязный блок для мытья полов 310, может перемещаться выше второй подъемной рамы блока для мытья полов и автоматически устанавливать блок для мытья полов 310, находящийся на второй подъемной раме блока для мытья полов, на его дно. Автоматическая замена блока для мытья полов, используемого роботом для мытья полов, осуществляется в соответствии с описанным выше процессом. Когда только что установленный блок для мытья полов станет грязным, можно повторять вышеуказанные шаги. Второй поддерживающий компонент 4 может поддерживать множество блоков для мытья полов. Робот может всасывать блок для мытья полов под магнитным действием, Для удаления блока для мытья полов нужно только высвободить магнитную силу, и блок для мытья полов автоматически опустится. В данной заявке первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 собирают и хранят блок для мытья полов 310, отсоединенный от робота-уборщика, и по очереди освобождают сохраненный блок для мытья полов 310 за счет подъема и спуска. Такая схема отличается простой конструкцией, повышенной стабильностью системы и редким случаем заедания, обеспечивая нормальную эксплуатацию базовой станции робота-уборщика в течение длительного времени. В одном возможном варианте осуществления, как показано на рис. 48, может быть множество зажимных соединителей 41 и согласованных смещающих элементов 42, а множество зажимных соединителей 41 может поддерживать различные места на краю блока для мытья полов 310, тем самым обеспечивая устойчивость поддерживаемого блока для мытья полов 310 и предотвращая опрокидывание блока для мытья полов 310. В описанном выше процессе блок для мытья полов 310, отсоединенный от робота-уборщика, можно понимать как грязный блок для мытья полов, снятый с робота. Блок для мытья полов 310 можно понимать как чистый блок для мытья полов, который заранее хранится в стопке на зажимной соединителе 41 на базовой станции робота-уборщика, и составляет по крайней мере один, в частности, зажимной соединитель находится во втором модуле хранения 212. В одном возможном варианте осуществления, как показано на рис. 49 и рис. 50, нижняя часть первой подъемной рамы блока для мытья полов 1 выполнена в виде гнезда, причем обе стороны гнезда наклонные, а форма нижней части совпадает с конструкцией края на дне блока для мытья полов 310, отсоединенного от робота-уборщика, так что блок для мытья полов 310, отсоединенный от робота-уборщика, может максимально точно опускаться на первую подъемную раму блока для мытья полов 1 и располагаться в середине первой подъемной рамы блока для мытья полов 1, предотвращая отклонение блока для мытья полов 310, отсоединенного от робота-уборщика. Конечно, вторая подъемная рама блока для мытья полов 3 также может иметь вышеупомянутую конструкцию, что здесь повторяться не будет. Как показано на рис. 48, в одном возможном варианте осуществления базовая станция 200 робота-уборщика может включать в себя оболочку, в которой могут разместиться такие детали и узлы, как модуль сбора блоков для мытья полов, модуль подачи блоков для мытья полов и приводная часть 5, при этом, как второй модуль хранение 212 и первый модуль хранения 211 также могут быть установлены в оболочке, таким образом, можно укладывать блок для мытья полов 310, отсоединенный от робота-уборщика, на ограничительную деталь 21, и блок для мытья полов 310 на зажимной соединитель 41. В частности, ограничительная деталь находится в первом модуле хранения 211, а зажимной соединитель – во втором модуле хранения 212. Как показано на рисунках 49 и 50, приводная часть 5 кинематически соединена с первой подъемной рамой блока для мытья полов 1, второй подъемной рамой блока для мытья полов 3, так что первая подъемная рама блока для мытья полов 1, вторая подъемная рама блока для мытья полов 3 могут подниматься и опускаться. В одном возможном варианте осуществления на первой подъемной раме блока для мытья полов 1 выполнено первое отверстие 11, которое может выдвигаться в горизонтальном направлении; на второй подъемной раме блока для мытья полов 3 выполнено второе отверстие 31, второе отверстие 31 может выдвигаться в горизонтальном направлении. Приводная часть 5 может включать в себя: вращающуюся часть 51, один конец вращающейся части 51 встроен в первое отверстие 11 и может скользить в первом отверстии 11, в то время как другой конец вращающейся части 51 встроен во второе отверстие 31 и может скользить во втором отверстии 31, двигатель 52; двигатель 52 используется для приведения в движение вращающейся части 51, чтобы вращающаяся часть 51 вращалась вокруг точки между двумя концами. Когда вращающаяся часть 51 вращается против часовой стрелки вокруг точки между двумя концами, левый конец вращающейся части 51 скользит во втором отверстии 31 и приводит в движение вторую подъемную раму блока для мытья полов 3 вниз. Правый конец вращающейся части 51 скользит в первом отверстии 11 и приводит в движение первую подъемную раму блока для мытья полов 1 вверх. Когда вращающаяся часть 51 вращается по часовой стрелке вокруг точки между двумя концами, левый конец вращающейся части 51 скользит во втором отверстии 31 и приводит в движение вторую подъемную раму блока для мытья полов 3 вверх, в то время как правый конец вращающейся части 51 скользит в первом отверстии 11 и приводит в движение первую подъемную раму блока для мытья полов 1 вниз. Предпочтительно, можно иметь два первого отверстия 11, которые находятся на обоих концах первой подъемной рамы блока для мытья полов 1, и два второго отверстия 31, которые расположены на обоих концах второй подъемной рамы блока для мытья полов. Вращающаяся часть 51 может включать в себя два вращающихся стержня, расположенного на двух концах первой подъемной рамы блока для мытья полов 1, и вал, соединяющий два вращающихся стержня, причем каждый вращающийся стержень взаимодействует с первым отверстием 11 и вторым отверстием 31, расположенным в одном направлении; двигатель 52 приводит вращающуюся часть 51 во вращение с помощью синхронного ремня 53. В данном варианте осуществления, с помощью вращающейся части 51 осуществляется одновременный подъем и спуск первой подъемной рамы блока для мытья полов 1 и второй подъемной рамы блока для мытья полов 3 с обоих концов соответственно, обеспечивая более стабильный и надежный процесс подъема и опускания. Чтобы облегчить установку двигателя 52 и установить двигатель 52 сбоку от всей базовой станции, передача между двигателем 52 и вращающейся частью 51 может быть реализована с помощью нескольких синхронных ремней 53 и нескольких шкивов 54. Например, как показано на рис. 49 и рис. 50, двигатель 52 расположен в верхнем левом углу базовой станции, шкив 54 расположен над базовой станцией в середине, передача между шкивом 54 и двигателем 52 осуществляется с помощью синхронного ремня 53, вращающаяся часть 51 расположена в середине базовой станции, передача между вращающейся частью 51 и шкивом 54 осуществляется с помощью синхронного ремня 53, таким образом, вращение двигателя 52 передается вращающейся части 51, обеспечивая при этом вращение вращающейся части 51 по часовой стрелке и против часовой стрелки. В частности, вращающийся ремень, простирающийся в вертикальном направлении, расположен между первой подъемной рамой блока для мытья полов и второй подъемной рамой блока для мытья полов, а двигатель расположен на дальнем конце вращающегося ремня, простирающегося в вертикальном направлении, напротив нижней пластины базовой станции. Кроме того, приводная часть дополнительно включает в себя: вращающийся ремень, простирающийся в поперечном направлении и соединенный с вращающимся ремнем, простирающимся в вертикальном направлении, а двигатель расположен на дальнем конце вращающегося ремня, простирающегося в поперечном направлении, вдали от блока хранения. На рис. 51 представлен вид спереди приводной части базовой станции робота-уборщика согласно одному варианту осуществления настоящего изобретения в другом варианте осуществления. Как показано на рис. 51, первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 движутся синхронно. Когда первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 поднимаются синхронно, первая подъемная рама блока для мытья полов 1 приводит установленный на ней блок для мытья полов 310 подняться, когда блок для мытья полов 310, отсоединенный от робота-уборщика, поднимается и превышает ограничительную деталь 21, ограничительная деталь 21 будет поддерживать блок для мытья полов 310, отсоединенный от робота-уборщика, вместе с этом, в процессе подъема вторая подъемная рама блока для мытья полов 3 приводит во вращение зажимной соединитель 41, находящийся на втором поддерживающем компоненте 4, так что блок для мытья полов 310, хранящийся в самом внизу зажимного соединителя 41, опускается на вторую подъемную раму блока для мытья полов 3. Когда первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 спускаются синхронно, первая подъемная рама блока для мытья полов 1 спускается прямо без блока для мытья полов 310, при этом вторая подъемная рама блока для мытья полов 3 спускается, неся при этом один чистый блок для мытья полов 310, чтобы тот опускался в нижнее положение на случай, когда робот придет на замену. В одном возможном варианте осуществления приводная часть 5 может включать в себя: вращающийся ремень 55, простирающийся в вертикальном направлении; двигатель 52, используемый для привода вращающегося ремня 55. Первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов 3 могут быть закреплены на вращающемся ремне 55 через фиксирующую пряжку 56, чтобы вращающийся ремень 55 смог привести в движение вверх и вниз блок для мытья полов 310, отсоединенный от робота-уборщика, и вторую подъемную раму блока для мытья полов 3. Предпочтительно, блок для мытья полов 310, отсоединенный от робота-уборщика, и вторая подъемная рама блока для мытья полов 3 могут быть выполнены в интегральном исполнении. В одном возможном варианте осуществления, когда первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов перемещаются в вертикальном направлении, отсутствует относительное движение между первой подъемной рамой блока для мытья полов и второй подъемной рамой блока для мытья полов, обеспечивая синхронное движение первой подъемной рамы блока для мытья полов и второй подъемной рамы блока для мытья полов, перед тем, как робот-уборщик въезжал на базовую станцию для замены блока для мытья полов, первая подъемная рама блока для мытья полов опускается, при этом вторая подъемная рама блока для мытья полов приводит в движение вниз один блок для мытья полов, робот-уборщик въезжает на базовую станцию, отсоединяя грязный блок для мытья полов и помещая его на первую подъемную раму блока для мытья полов, робот-уборщик продолжает перемещение вперед, устанавливая на себя блок для мытья полов, помещенный на вторую подъемную раму блока для мытья полов, затем робот-уборщик покидает базовую станцию, первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов одновременно поднимаются, и грязный блок для мытья полов на первой подъемной раме блока для мытья полов извлекается через ограничительную деталь, при этом один чистый блок для мытья полов помещается на вторую подъемную раму блока для мытья полов, чтобы дождаться следующего прибытия робота-уборщика. Предпочтительно, первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов могут восприниматься как одно целое, то есть первая подъемная рама блока для мытья полов и вторая подъемная рама блока для мытья полов перемещаются вверх и вниз как одно целое. Благодаря отсутствию относительного перемещения между первой подъемной рамой блока для мытья полов и второй подъемной рамой блока для мытья полов, можно упростить конструкцию базовой станции робота-уборщика и повысить стабильность работы базовой станции. При этом первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 могут быть закреплены на вращающемся ремне 55 с помощью фиксирующей пряжки 56, когда под действием двигателя 52 поднимается вращающийся ремень 55 подъем, первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 поднимаются одновременно. При подъеме первая подъемная рама блока для мытья полов 1 перемещает грязный блок для мытья полов, снятый с робота, к ограничительной детали 21 для его удержания. Когда под действием двигателя 52 опускается вращающийся ремень 55, блок для мытья полов 310, отсоединенный от робота-уборщика, и вторая подъемная рама блока для мытья полов 3 опускаются одновременно. При спуске вторая подъемная рама блока для мытья полов 3 несет и перемещает блок для мытья полов 310, хранящийся на зажимном соединителе 41 и находящийся в самом внизу, вниз для замены роботом блока для мытья полов. Например, вращающийся ремень 55 может иметь форму петли, а базовая станция робота-уборщика включает в себя: два шкива 54, расположенного сверху и снизу, вращающийся ремень 55 наложен на шкивы 54. Двигатель 52 приводит во вращение один из шкивов 54 через синхронный приводной ремень, таким образом реализуя вращение вращающегося ремня 55 против часовой стрелки и по часовой стрелке, а вращающийся ремень 55 может приводить в движение вверх или вниз первую подъемную раму блока для мытья полов 1 и вторую подъемную раму блока для мытья полов 3. Конечно, приводной ремень также может иметь форму полосы, базовая станция робота-уборщика включает в себя только один вращающийся вал, двигатель 52 может приводить вращающийся вал во вращение, приводной ремень может наматываться на приводной вал, контролируя подъем и опускание первой подъемной рамы блока для мытья полов 1 и второй подъемной рамы блока для мытья полов 3 путем наматывания и высвобождения во время вращения. В приведенных выше вариантах осуществления первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 поднимаются и опускаются через одну и ту же приводную часть 5, а под действием приводной части 5 первая подъемная рама блока для мытья полов 1 и вторая подъемная рама блока для мытья полов 3 поднимаются или опускаются синхронно или по очереди, обеспечивая повышенную синхронность первой подъемной рамы блока для мытья полов 1 и второй подъемной рамы блока для мытья полов 3, а также простую конструкцию и компактность всей приводной части 5. В данной заявке также предоставлена система робота-уборщика, которая включает в себя: любую из вышеупомянутых базовых станций робота-уборщика; робот-уборщик, на котором могут быть установлены чистящие элементы, данный робот-уборщик может отсоединить и/или устанавливать чистящие элементы на базовой станции робота-уборщика, чистящие элементы представляют собой блок для мытья полов 310. В одном возможном варианте осуществления базовая станция робота-уборщика включает в себя блок зарядки, который обеспечивает энергией робот-уборщик, когда он стыкован с базовой станцией. Робот-уборщик возвращается на базовую станцию робота-уборщика при низком уровне зарядки и покидает базовую станцию робота-уборщика, когда она полностью заряжена, чтобы продолжить уборку. В одном варианте осуществления настоящей заявки предложена базовая станция 200, ссылаясь на рис. 40–47. Данная базовая станция 200 может опустить сохраненный блок для мытья полов 310 через модуль подачи блоков для мытья полов 236, когда робот-уборщик должен заменить на новый блок для мытья полов 310, такой как салфетку-тряпку или швабру, таким образом облегчая замену роботом-уборщиком на новый блок для мытья полов 310, уменьшая вмешательство пользователя и улучшая пользовательский опыт. Как показано на рис. 40, базовая станция также включает в себя модуль сбора блоков для мытья полов, тем самым реализуя автоматическое извлечение использованного блока для мытья полов 310 и автоматическую замену на новый блок для мытья полов 310. В данном варианте осуществления базовая станция 200 включает в себя: оболочку 3; второй поддерживающий компонент, установленный на оболочке 3, при этом второй поддерживающий компонент включает в себя первый поддерживающий механизм 201; второй поддерживающий механизм 202, установленный на оболочке 3. Оболочка 3 имеет блок хранения 210 для укладки блока для мытья полов 310 и рабочую позицию, расположенную под блоком хранения 210. Первый поддерживающий механизм 201 имеет поддерживающее состояние, при котором он поддерживает блок для мытья полов 310, и сложенное состояние, при котором не поддерживает блок для мытья полов 310. Второй поддерживающий механизм 202 имеет опорное состояние, при котором он поддерживает блок для мытья полов 310 в блоке хранения 210, и открытое состояние, при котором он высвобождает по крайней мере один блок для мытья полов 310 на рабочую позицию. При этом, как показано на рис. 42, когда второй поддерживающий механизм 202 находится в опорном состоянии, первый поддерживающий механизм 201 находится в сложенном состоянии. Как показано на рис. 45, когда второй поддерживающий механизм 202 находится в открытом состоянии, первый поддерживающий механизм 201 находится в поддерживающем состоянии, чтобы поддерживать блок для мытья полов 310, оставшийся в блоке хранения 210. На базовой станции 200, предложенной в данном варианте осуществления, благодаря установке взаимодействующих друг с другом первого поддерживающего механизма 201 и второго поддерживающего механизма 202, когда робот-уборщик должен заменить блок для мытья полов 310, переключают второй поддерживающий механизм 202 в открытое состояние, чтобы по крайней мере один блок для мытья полов 310 был опущен в рабочую позицию, при этом робот-уборщик переходит в рабочую позицию и заменяет находящийся в рабочей позиции блок для мытья полов 310. Соответственно, блоки для мытья полов 310, оставшиеся в блоке хранения 210, поддерживаются первым поддерживающим механизмом 201 во избежание падения, и когда второй поддерживающий механизм 202 восстанавливается в опорное состояние, он снова поддерживает блок для мытья полов 310, дожидаясь следующей замены роботом-уборщиком на новый блок для мытья полов 310 снова. Следовательно, в сценарии замены блока для мытья полов 310 базовая станция 200, предложенная в данном варианте осуществления, может осуществить автоматическое опускание блока для мытья полов 310, реализуя автоматическую замену блока для мытья полов 310, уменьшая вмешательство пользователя в замену блока для мытья полов 310 и улучшая пользовательский опыт. В данном варианте осуществления второй поддерживающий механизм 202 поддерживает блок для мытья полов 310 в блоке хранения 210, когда он находится в опорном состоянии, причем первый поддерживающий механизм 201 находится в сложенном состоянии. Когда второй поддерживающий механизм 202 находится в открытом состоянии, он высвобождает по крайней мере один блок для мытья полов 310 в рабочую позицию, причем первый поддерживающий механизм 201 находится в поддерживающем состоянии и поддерживает оставшийся блок для мытья полов 310 в блоке хранения 210. Таким образом, первый поддерживающий механизм 201 и второй поддерживающий механизм 202 взаимодействуют друг с другом, осуществляя поштучное опускание блока для мытья полов 310 и замену роботом-уборщиком по одному блоку для мытья полов 310 каждый раз. Конечно, в других вариантах осуществления базовая станция 200 может также опускать два или даже больше блоков для мытья полов 310 за один раз, чтобы позволить двум или больше роботам-уборщикам заменить на новый блок для мытья полов 310, особое ограничение не предусмотрено в настоящей заявке. В данном варианте осуществления множество блоков для мытья полов 310 уложены в блок хранения 210, в частности, множество блоков для мытья полов 310 уложены во второй модуль хранения 212 в блоке хранения 210 и поддерживаются вторым поддерживающим механизмом 202 для предотвращения падения, при этом второй поддерживающий механизм 202 находится во втором модуле хранения. Блок для мытья полов 310 имеет определенную структурную жесткость и может сохранять свою основную форму при поддержке первого поддерживающего механизма 201 или второго поддерживающего механизма 202. При этом блок для мытья полов 310 может быть кареткой с прикрепленной салфеткой-тряпкой или шваброй, более того, блок для мытья полов 310 может иметь скобу с прикрепленной салфеткой-тряпкой или шваброй, данная скоба может быть жесткой, разумеется, скоба может быть металлической или пластиковой, должна сохранить общую форму без изменений. Второй модуль хранения 212 выполнен в виде прямоугольного параллелепипеда, соответственно, блок для мытья полов 310 – прямоугольной пластины. Первый поддерживающий механизм 201 и второй поддерживающий механизм 202 расположены на днище второго модуля хранения 212 с обеих сторон, поддерживая блок для мытья полов 310 в разных состояниях. При этом, блок для мытья полов 310 в блоке хранения 210 представляет собой чистый, то есть, это блок для мытья полов 310 подлежит установке. В частности, рабочая позиция расположена под блоком хранения 210, и, в частности, вторая рабочая позиция 252 расположена под вторым модулем хранения 212, робот может войти на базовую станцию и остановиться во второй рабочей позиции 252, где он устанавливает чистый блок для мытья полов 310. Вторая рабочая позиция 252 расположена под вторым модулем хранения 212 и используется для приема блока для мытья полов 310, опущенного из второго поддерживающего механизма 202. В рабочей позиции имеется приемный паз для размещения блока для мытья полов 310. Минимальное расстояние между вторым поддерживающим механизмом 202 и дном приемного паза больше, чем толщина одного блока для мытья полов 310. На одной стороне стенки 52 приемного паза 51 может быть выполнено отверстие для входа и выхода робота-уборщика. Конечно, стенка 52 приемного паза 51 также может ограничивать блок для мытья полов 310, чтобы избежать смещения блока для мытья полов 310, когда робот-уборщик входит и выходит, обеспечивая успешную замену. Первый поддерживающий механизм 201 и второй поддерживающий механизм 202 расположены на днище блока хранения 210 с обеих сторон, поддерживая блок для мытья полов 310 в различных состояниях. Когда первый поддерживающий механизм 201 находится в сложенном состоянии и второй поддерживающий механизм 202 находится в открытом состоянии, ситуации аналогичны, они не поддерживают блок для мытья полов 310 в блоке хранения 210, снимая ограничение поддержки блока для мытья полов 310. Соответственно, чтобы предотвратить падение всех блоков для мытья полов 310, первый поддерживающий механизм 201 и второй поддерживающий механизм 202 осуществляют поддерживание в разное время, обеспечивая опускание только блока для мытья полов 310, подлежащего установке, и нахождение остальных блоков для мытья полов 310 во втором модуле хранения 212. Второй поддерживающий механизм 202 и первый поддерживающий механизм 201 срабатывают совместно. Таким образом, когда необходимо привести в движение первый поддерживающий механизм 201 и второй поддерживающий механизм 202 или необходимо определить положение второго поддерживающего механизма 202 и первого поддерживающего механизма 201, достаточно использовать только один энергетический блок, точно так же, узнав состояние и положения только одного поддерживающего механизма, можно узнать состояние и положения другого поддерживающего механизма, что позволяет сэкономить количество датчиков и снизить стоимость. В данном варианте осуществления первый поддерживающий механизм 201 и второй поддерживающий механизм 202 снабжены сцепными конструкциями (такими, как ограничительные выступы 21, 22 и рычаг переключения 12), через которые запускается первый поддерживающий механизм 201, приводя в действие второй поддерживающий механизм 202, или запускается второй поддерживающий механизм 202, приводя в действие первый поддерживающий механизм 201. В варианте осуществления, показанном на рис. 40, второй поддерживающий механизм 202 сработает, приводя в действие первый поддерживающий механизм 201. В других вариантах осуществления первый поддерживающий механизм 201 и второй поддерживающий механизм 202 могут быть не сцепными, для них можно использовать независимые энергетические блоки для осуществления своего независимого вращения, можно контролировать их с помощью контроллера для осуществления поддержки в разное время. В одном варианте осуществления настоящей заявки первый поддерживающий механизм 201 срабатывает и осуществляет переключение между поддерживающим состоянием и сложенным состоянием, а второй поддерживающий механизм 202 срабатывает и осуществляет переключение между опорным состоянием и открытым состоянием. При этом первый поддерживающий механизм 201 и второй поддерживающий механизм 202 могут совершать возвратно-поступательное вращение, возвратно-поступательное движение, или перемещение, формы их действия могут быть одинаковыми или разными, что не ограничивается в настоящей заявке. Предпочтительно, первый поддерживающий механизм 201 переключается между поддерживающим состоянием и сложенным состоянием посредством вращения, а второй поддерживающий механизм 202 переключается между опорным состоянием и открытым состоянием посредством вращения. Первый поддерживающий механизм 201 и второй поддерживающий механизм 202 имеют определенный диапазон действия, причем поддерживающее состояние и сложенное состояние, опорное состояние и открытое состояние могут быть начальным положением и конечным положением или начальным состоянием и конечным состоянием в соответствующих диапазонах действия. Например, при выполнении перемещения или вращения, первый поддерживающий механизм 201 и второй поддерживающий механизм 202 имеют диапазон возвратно-поступательного перемещения и диапазон возвратно-поступательного вращения с определенным расстоянием или углом, при этом поддерживающее состояние и сложенное состояние, а также опорное состояние и открытое состояние могут быть конечным положением или конечным состоянием в диапазоне перемещения и диапазоне вращения. В частности, первый поддерживающий механизм 201 может вращаться вокруг первой оси вращения. Первый поддерживающий механизм 201 может переключаться между поддерживающим состоянием и сложенным состоянием посредством вращения. Второй поддерживающий механизм 202 может вращаться вокруг второй оси вращения 11. Второй поддерживающий механизм 202 переключается между опорным состоянием и открытым состоянием путем вращения; первая ось вращения параллельна второй ось вращения 11. В варианте осуществления, показанном на рис. 40–44, когда второй поддерживающий механизм 202 вращается вокруг второй оси вращения 11, он приводит во вращение первый поддерживающий механизм 201 вокруг первой оси вращения (то есть: оси поворотного вала 402). В одном варианте осуществления, показанном на рис. 40–44, второй поддерживающий механизм 202 включает в себя опорную пластину (202a, 202b). Один конец опорной пластины является соединительным концом 25 для соединения с поворотным валом 402, а другой конец – свободным концом 26. Поворотный вал 402 установлен с возможностью вращения на оболочке 3. Поворотный вал 402 может приводиться в движение энергетическим блоком, и заставлять опорную пластину вращаться вокруг первой оси вращения. Первый поддерживающий механизм 201 включает в себя вращающуюся перегородку (201a, 201b), которая вращается вокруг второй ось вращения 11. На вращающейся перегородке установлен опорный стержень 13. При сложенном состоянии опорный стержень 13 расположен вне блока хранения 210, а при поддерживающем состоянии он вставлен во второй модуль хранения 212. Для обеспечения сцепления между первым поддерживающим механизмом 201 и вторым поддерживающим механизмом 202 вращающаяся перегородка также снабжена рычагом переключения. Вращающаяся перегородка расположена на одной стороне опорной пластины в осевом направлении вдоль первой оси вращения. При этом осевое направление вдоль первой оси вращения означает продольное направление, стоя лицом к рис. 42, соответственно, вращающаяся перегородка может быть установлена на передней или задней стороне опорной пластины. Как показано на рис. 42, вращающаяся перегородка расположена на передней стороне опорной пластины. Опорная пластина снабжена первым ограничительным выступом 21 и вторым ограничительным выступом 22 на боковой поверхности соединительного конца 25. Первый ограничительный выступ 21 и второй ограничительный выступ 22 расположены в периферии с определенным промежутком, и между ними образуется зазор, через который рычаг переключения вставляется между первым ограничительным выступом 21 и вторым ограничительным выступом 22. Рычаг переключения расположен между первым ограничительным выступом 21 и вторым ограничительным выступом 22 и ограничивается вращением первого ограничительного выступа 21 и второго ограничительного выступа 22. Чтобы облегчить вставку первого поддерживающего механизма 201 между двумя соседними блоками для мытья полов 310, поддержать оставшийся блок для мытья полов 310 и избежать его падения, между двумя соседними блоками для мытья полов 310 предусмотрен промежуточный зазор 301, первый поддерживающий механизм 201 может быть вставлен в промежуточный зазор 301 для поддерживания блока для мытья полов 310, находящегося над промежутком. Как показано на рис. 42, между краями блоков для мытья полов 310 выполнена конструкция нахлестки 302, а между конструкциями нахлестки 302 верхнего и нижнего блоков для мытья полов 310 имеется промежуточный зазор 301 между верхним и нижним блоком для мытья полов 310, причем блок для мытья полов 310 имеет основную часть между конструкциями нахлестки 302, и основные части верхнего и нижнего блоков для мытья полов 310 контактируют и поддерживают друг друга. Опорный стержень 13 может поддерживать край блока для мытья полов 310, и длина части, вставленной внутри блока хранения 210, небольшая. Второй поддерживающий механизм 202 и сцепной с ним первый поддерживающий механизм 201 образуют второй поддерживающий компонент 60. Модуль подачи блоков для мытья полов 236 снабжен множеством вторых поддерживающих компонент 60. По крайней мере два вторых поддерживающих компонента 60 соответственно установлены с обеих сторон блока хранения 210 вдоль первого направления f; первое направление f перпендикулярно вертикальному направлению. В данном варианте осуществления первое направление f является поперечным направлением, стоя лицом к рис. 42, второе направление перпендикулярно первому направлению f, а второе направление является продольным направлением, стоя лицом к рис. 42. Как показано на рис. 40 и рис. 41, каждый второй поддерживающий компонент 60 может быть снабжен вмещающей коробкой 61, имеющей с внутренней стороны отверстие, обращенное к блоку хранения 210. Опорный стержень 13 находится во вмещающей коробке 61, когда в сложенном состоянии, и выходит из отверстия вмещающей коробки 61 и вставляется в блок хранения 210, когда в поддерживающем состоянии, поддерживая блок для мытья полов 310. Во втором поддерживающем компоненте 60 первый поддерживающий механизм 201 временно поддерживает блок для мытья полов 310, когда опускается блок для мытья полов 310, а второй поддерживающий механизм 202 постоянно поддерживает блок для мытья полов 310, когда не опускается блок для мытья полов 310. Когда второй поддерживающий механизм 202 переключается из опорного состояния в открытое состояние, блок для мытья полов 310 опускается под действием силы тяжести, пока не упадет на дно рабочей позиции. Их больше трех. Соответственно, количество первых поддерживающих механизмов 201 и вторых поддерживающих механизмов 202 обеспечивает стабильное поддерживание блока для мытья полов 310, избегая выпадения блока для мытья полов 310 сам по себе, а количество вторых поддерживающих компонентов 60 превышает три. В варианте осуществления, показанном на рис. 41, оболочка 3 снабжена четырьмя вторыми поддерживающими компонентами 60, и, соответственно, оболочка 3 снабжена четырьмя опорными пластинами и четырьмя вращающимися перегородками, согласованными с ними. При опорном состоянии четыре опорные пластины расположены горизонтально в шахматном порядке и не противоположны друг другу. Когда опорная пластина переключается из опорного состояния в открытое, опорная пластина вращается вниз, открывая нижнюю часть блока хранения 210, при этом самый нижний блок для мытья полов 310a перемещается вниз под действием силы тяжести. Во избежание помех, вызванных вращением, вторые поддерживающие компоненты 60, расположенные по обеим сторонам блока хранения 210, расположены в шахматном порядке, так что опорная пластина имеет большую длину, таким образом образуя путь для опускания блока для мытья полов 310 и избегая смещения блока для мытья полов 310 в результате прямого падения. Множество вторых поддерживающих компонентов 60 или множество вторых поддерживающих механизмов 202 расположены в разных положениях во втором направлении. С левой стороны блока хранения 210 находятся два второго поддерживающего компонента 60, и с правой стороны блока хранения 210 – два второго поддерживающего компонента 60. Расстояние между двумя левыми вторыми поддерживающими компонентами 60 больше, чем расстояние между двумя правыми вторыми поддерживающими компонентами 60. Между двумя вторыми поддерживающими компонентами 60, находящимися на одной стороне, имеется набор зубчатой передачи, который может осуществлять передачу от первого приводного вала 401 к поворотному валу 402. Во избежание смещения при опускании блока для мытья полов 310 и обеспечения успешной последующей замены блока для мытья полов 310, длина опорной пластины, вставляющейся в блок хранения 210 при опорном состоянии, больше 1/2 от ширины блока хранения 210 по первому направлению F. Таким образом, второй поддерживающий механизм 202 большей длины может формировать путь для опускания блока для мытья полов 310, что позволяет избежать смещения при опускании блока для мытья полов 310, обеспечить точное положение опускания блока для мытья полов 310 и облегчить замену роботом-уборщиком. Чтобы облегчить вставку между двумя соседними блоками для мытья полов 310, опорный стержень 13 выполнен более коротким, в частности, длина опорного стержня 13, находящегося в блок хранения 210 при поддерживающем состоянии, меньше, чем длина опорной пластины, находящейся во втором модуле хранения 212 при опорном состоянии. Кроме того, между краями (нахлестками 302) двух соседних уложенных друг на друга блоков для мытья полов 310 образуется промежуточный зазор 301. Внешний конец 131 выполнен в виде плоской головки, чтобы удобно вставлять в промежуточный зазор 301 между соседними блоками для мытья полов 310. Чтобы еще больше облегчить вставку первого поддерживающего механизма 201 в блок для мытья полов 310, ширина опорного стержня 13 постепенно уменьшается по мере его продвижения к своему внешнему концу 131. Направление F2 ширины опорного стержня 13 приблизительно параллельно периферии вокруг второй оси 11 вращения. Опорная поверхность опорного стержня 13 представляет собой изогнутую поверхность. В процессе опускания блока для мытья полов 310, опорные пластины с обеих сторон блока для мытья полов 310 открываются в обе стороны, блок для мытья полов 310 опускается по опорной поверхности опорной пластины. Однако может возникнуть ситуация, когда скорость спуска или смещение обеих сторон блока для мытья полов 310 не синхронизировано, в результате чего весь блок для мытья полов 310 может отклоняться вбок, что может даже привести к смещению или опрокидыванию при опускании, воздействовать на последующую замену чистящих деталей. Чтобы избежать этой проблемы, второй поддерживающий механизм 202 (например: опорная пластина) также снабжен буферной частью 231. Буферная часть 231 включает в себя буферную наклонную поверхность 231b; высота выступа буферной наклонной плоскости 231b постепенно увеличивается в направлении от соединительного конца 25 второго поддерживающего механизма 202 к свободному концу 26 второго поддерживающего механизма 202. Буферная часть 231 расположена на опорной поверхности второго поддерживающего механизма 202, блокируя блок для мытья полов 310 во время опускания блока для мытья полов 310, пока она не раскроется шире и не высвободит блок для мытья полов 310. Вторые поддерживающие механизмы 202, расположенные с обеих сторон блока хранения, снабжены буферными частями 231. В процессе вращения и открытия второго поддерживающего механизма 202 блок для мытья полов 310 опускается, останавливается или уменьшает скорость опускания, когда войдет в контакт с буферной наклонной плоскостью 231b буферной части 231. В это время, когда обе стороны блока для мытья полов 310 отклоняются, нахлестка 302 на одной стороне блока для мытья полов 310 будет контактировать с буферной наклонной плоскостью 231b первой, чтобы остановить или замедлить скорость спуска, а затем нахлестка 302 на другой стороне будет догонять нахлестку 302, которая контактирует с буферной наклонной плоскостью 231b первой, до тех пор, пока блок для мытья полов 310 не восстановится на горизонтальный уровень, устраняя проблему отклонения и обеспечивая нахождение блока для мытья полов в точном необходимом для замены состоянии при высвобождении. Более того, буферная наклонная плоскость 231b может также замедлять скорость опускания блока для мытья полов 310, чтобы он опускался в приемный паз 51 с более низкой скоростью, что дополнительно исключает возможность смещения блока для мытья полов 310. Кроме того, буферная часть 231 также имеет скользящую наклонную плоскость 231а; по сравнению с буферной наклонной плоскостью 231b скользящая наклонная плоскость 231a находится ближе к соединительному концу; в направлении от соединительного конца 25 к свободному концу 26 высота выступа скользящей наклонной плоскости 231а постепенно уменьшается. Скользящая наклонная плоскость 231a и буферная наклонная плоскость 231b образуют ступенчатую структуру. Когда блок для мытья полов 310 скользит к буферной части 231 в процессе опускания, он сначала входит в контакт со скользящей наклонной плоскостью 231a, скользящая наклонная плоскость 231a контактирует с наклоном нахлестки 302, благодаря чему блок для мытья полов 310 плавно скользит. Когда блок для мытья полов 310 скользит к буферной наклонной плоскости 231b, блок для мытья полов 310 демпфируется буферной наклонной плоскостью 231b, чтобы гарантировать блок для мытья полов 310 на горизонтальном уровне. Предпочтительно, опорная пластина имеет множество буферных частей 231; множество буферных частей 231 расположены вдоль направления от соединительного конца 25 к свободному концу 26, формируя ступенчатую буферную структуру 23. В частности, опорная пластина имеет ступенчатую буферную структуру 23 для поддерживания блока для мытья полов 310. Ступенчатая буферная структура 23 включает в себя множество буферных частей 231, расположенных по направлению от соединительного конца 25 к свободному концу 26. Каждая буферная часть 231 включает в себя скользящую наклонную плоскость 231a и буферную наклонную плоскость 231b. Скользящая наклонная плоскость 231a ближе к соединительному концу 25, чем буферная наклонная плоскость 231b. В направлении от соединительного конца 25 к свободному концу 26 высота выступа скользящей наклонной плоскости 231a постепенно уменьшается, а высота выступа буферной наклонной плоскости 231b постепенно увеличивается. Буферная часть 231 в общем выполнена в виде V-образной канавки, и множество V-образных канавок последовательно расположены по направлению от соединительного конца 25 к свободному концу 26, образуя ступенчатую буферную структуру 23. В процессе опускания блока для мытья полов 310, по мере увеличения угла раскрытия опорной пластины блок для мытья полов 310 шаг за шагом опускается на ступенчатую буферную структуру 23, а скорость опускания блока для мытья полов 310 замедляется и амортизируется, проходя через каждую ступень буферной части 231, чтобы избежать отклонения, вызванного слишком высокой скоростью снижения. Продолжая ссылаться на рис. 42–47, опорная пластина имеет принимающую изогнутую поверхность 24 на стороне ступенчатой буферной структуры 23 вдали от свободного конца 26. Принимающая изогнутая поверхность 24 обращена наружу выступом, образуя выпуклую наружу поверхность. В опорном состоянии принимающая изогнутая поверхность 24 поддерживает блок для мытья полов 310. Для удобства опускания по одному блоку для мытья полов 310, когда опорная пластина поворачивается не более чем на 30 градусов из опорного состояния в открытое состояние, принимающая изогнутая поверхность 24 непрерывно поддерживает блок для мытья полов 310. На начальном этапе вращения опорной пластины блок для мытья полов 310a, находящийся в самом внизу, имеет небольшой диапазон опускания, с увеличением угла раскрытия опорной пластины диапазон опускания блока для мытья полов 310 увеличивается, и блок для мытья полов 310 постепенно сползает вниз к ступенчатой буферной структуре 23. Чтобы гарантировать, что опорный стержень 13 поддерживает оставшиеся блоки для мытья полов 310, за исключением самого нижнего блока для мытья полов 310a, и избежать опускания слишком большого количества блоков для мытья полов 310, при опорном состоянии разница в высоте между свободным концом 26 опорной пластины и опорным стержнем 13 должна больше толщины одного блока для мытья полов 310, но меньше толщины двух блоков для мытья полов 310. В сложенном состоянии внешний конец 131 опорного стержня 13 находится над самым нижним блоком для мытья полов 310a. В сложенном состоянии внешний конец 131 опорного стержня 13 противоположен промежуточному зазору 301 в первом направлении F. В данном варианте осуществления оболочка 3 снабжена механизмом передачи. Приводной двигатель 400 приводит в синхронное перемещение множество вторых поддерживающих компонентов 60 через механизм передачи. Механизм передачи может включать в себя червячную передачу. Приводной двигатель 400 приводит во вращение поворотный вал 402 через червячную передачу, на поворотном валу 402 можно закрепить множество вторых поддерживающих механизмов 202, тем самым приводя во вращение множество вторых поддерживающих механизмов 202 одновременно. В частности, оболочка 3 также снабжена приводным двигателем 400, первым приводным валом 401 и вторым приводным валом 406. Первый приводной вал 401 и второй приводной вал 406 соответственно установлены с обеих сторон блока хранения 210 по первому направлению F. Первый приводной вал 401 и второй приводной вал 406 расположены параллельно первой оси вращения и соответственно приводят во вращение поворотные валы 402, расположенные с обеих сторон блока хранения 210. Приводной двигатель 400 приводит во вращение первый приводной вал 401 и второй приводной вал 406. Приводной двигатель 400 и первый приводной вал 401 расположены на одной стороне блока хранения 210 по первому направлению F, а второй приводной вал 406 расположен с другой стороны блока хранения 210 по первому направлению F. с одной стороны блока хранения 210 по второму направлению предусмотрена цепочка 405. Приводной двигатель 400 приводит в движение второй приводной вал 406 через цепочку 405. Второе направление перпендикулярно первому направлению F и вертикальному направлению. Далее проведено подробное описание принципа работы модуля подачи блоков для мытья полов 236 в одном варианте осуществления настоящей заявки со ссылкой на рис. 40–47, чтобы лучше понять настоящую заявку. Как показано на рис. 40, модуль подачи блоков для мытья полов 236 и устройство для извлечения чистящей детали размещены рядом, образуя базовую станцию 200 для парковки робота-уборщика. Базовая станция 200 может быть оснащена датчиком, который может определять положение второго поддерживающего механизма 202 (опорной пластины), а затем модуль подачи блоков для мытья полов 236 может управлять действием второго поддерживающего механизма 202 в соответствии с сигналом от датчика. В блоке хранения 210 хранится множество блоков для мытья полов 310 (310a, 310b, 310c), уложенных друг на друга, рабочие позиции расположены под блоком хранения 210, а четыре второго поддерживающего компонента 60 расположены по обеим сторонам дна блока хранения 210. Среди них два второго поддерживающего компонента 60 расположены с левой стороны, и, соответственно, две опорные пластины расположены с левой стороны, воздействуют с одним же поворотным валом 402 и приводятся в движение первым приводным валом 401, более того, каждая опорная пластина соответствует поворотной перегородке на рычажном механизме. Два второго поддерживающего компонента 60 расположены с правой стороны, и, соответственно, две опорные пластины расположены с левой стороны, воздействуют с одним же поворотным валом 402 и приводятся в движение вторым ведущим валом 406, более того, каждая опорная пластина соответствует поворотной перегородке в рычаге. Поперечное сечение блока для мытья полов 310 совпадает с поперечным сечением блока хранения 210, а левая и правая стороны блока для мытья полов 310 расположены близко к левой и правой боковым стенкам блока хранения 210, таким образом, пространство блока хранения 210 можно использовать в максимально возможной степени, и удобно для вставки первого поддерживающего механизма 201 для поддерживания оставшихся блоков для мытья полов 310. Как показано на рис. 42, когда не нужно опускать блок для мытья полов 310, опорная пластина находится в опорном состоянии, поддерживая все блоки для мытья полов 310 в блоке хранения 210. Опорный стержень 13 находится в сложенном состоянии, размещен во вмещающей коробке 61 и не выступает из отверстия вмещающей коробки 61. В это время имеется промежуточный зазор 301 между нахлестками 302 самого нижнего блока для мытья полов 310a и второго блоком для мытья полов 310b снизу, а внешний конец 131 опорного стержня 13 выровнен с промежуточным зазором 301 по первому направлению F. Кроме того, внешний конец 131 опорного стержня 13 выше верхней поверхности самого нижнего блока для мытья полов 310a, но ниже верхней поверхности второго блока для мытья полов 310b снизу. Как показано на рис. 43–45. Когда робот-уборщик должен заменить блок для мытья полов 310, взаимодействует с базовой станцией 200, а под контролем базовой станции 200 модуль подачи блоков для мытья полов 236 опускает новый блок для мытья полов 310. Под контролем контроллера базовой станции 200 запускается приводной двигатель 400, который приводит в синхронное движение четыре второго поддерживающего компонента 60 одновременно через первый приводной вал 401 и второй приводной вал 406. Опорная пластина поворачивается вниз и постепенно открывается, а самый нижний блок для мытья полов 310a начинает двигаться вниз. На начальном этапе поворота опорной пластины опорный стержень 13 выходит из отверстия вмещающей коробки 61 в зазор 301 и вставляется в промежуточный зазор 301. Как показано на рис. 43, когда опорная пластина поворачивается примерно на 30 градусов, самый нижний блок для мытья полов 310a имеет незначительное смещение и все еще поддерживается принимающей изогнутой поверхностью 24; Кроме того, в это время опорный стержень 13 вставлен в промежуточный зазор 301, поддерживая оставшиеся блоки для мытья полов 310, начиная с второго блока для мытья полов 310b снизу, так что можно опускать только один блок для мытья полов 310, осуществляя поштучное опускание блока для мытья полов 310. Как показано на рис. 44, блок для мытья полов 310 скользит от принимающей изогнутой поверхности 24 к ступенчатой буферной структуре 23 с увеличением угла раскрытия опорной пластины. При этом блок для мытья полов 310 может войти в буферную часть 231, пройдя через скользящую наклонную плоскость 231a и замедляясь буферной наклонной плоскостью 231b до тех пор, пока угол раскрытия опорной пластины не будет продолжать увеличиваться и блок для мытья полов 310 не поступает в следующую ступень буферной части 231. Как показано на рис. 45, когда опорная пластина полностью открыта (в открытом состоянии), угол между ней и горизонтальной плоскостью составляет примерно 80-90 градусов, блок для мытья полов 310 оторвется от опорной пластины, пройдя через последнюю ступень буферной части 231. При этом блок для мытья полов 310 находится близко к приемному пазу 51, поэтому смещение сложно сформировать или смещение незначительное, что обеспечивает точное положение опускания. В это время опорный стержень 13 находится в поддерживающем состоянии. Далее, как показано на рис. 46 и рис. 47, опорная пластина начинает возвращаться в опорное состояние, приводной двигатель 400 может быть реверсирован, опорная пластина вращается вверх, и, соответственно, опорный стержень 13 сжимается назад, пока опорная пластина не вернется, чтобы поддерживать блок для мытья полов 310 в блоке хранения 210, а опорный стержень 13 полностью возвращается во вращающую коробку 61 в сложенное состояние. Соответственно, изначально второй блок для мытья полов 310b снизу и третий блок для мытья полов 310c снизу в блоке хранения 210 становятся самым нижним блоком для мытья полов 310a и вторым блоком для мытья полов 310b снизу. Для опускания нового блока для мытья полов 310, повторять процесс, показанный на рис. 40–47. Основываясь на той же идее, настоящим изобретением также предложены базовая станция 200 для парковки робота-уборщика, автоматическая система очистки, как описано в следующих вариантах осуществления. Поскольку базовая станция 200 для парковки робота-уборщика, роботизированная система чистки имеют аналогичный принцип решения проблем и технические результаты, как у устройства для извлечения чистящих деталей, поэтому реализация базовой станции 200 для парковки робота-уборщика и роботизированной системы чистки может ссылаться на примеры осуществления вышеописанных базовых станций 200, что повторяться здесь не будет. Ссылаясь на рис. 40–47, в одном варианте осуществления настоящей заявки также предложена базовая станция 200 для парковки робота-уборщика, включающая в себя: модуль сбора блоков для мытья полов, модуль подачи блоков для мытья полов, причем модуль подачи блоков для мытья полов включает в себя модуль подачи блоков для мытья полов 236, причем модуль подачи блоков для мытья полов 236 включает в себя: первый поддерживающий механизм 201, который имеет поддерживающее состояние, при котором поддерживает блок для мытья полов, и сложенное состояние, при котором не поддерживает блок для мытья полов; второй поддерживающий механизм 202, который имеет опорное состояние для поддерживания блока для мытья полов 310 во втором модуле хранения 212 и открытое состояние для высвобождения по крайней мере одного блока для мытья полов 310 во вторую рабочую позицию 252; при этом, когда второй поддерживающий механизм 202 находится в опорном состоянии, первый поддерживающий механизм 201 находится в сложенном состоянии; а когда второй поддерживающий второй механизм 202 находится в открытом состоянии, первый поддерживающий механизм 201 находится в поддерживающем состоянии, чтобы поддерживать оставшиеся блоки для мытья полов 310 во втором модуле хранения 212. Ссылаясь на рис. 40–47, в одном варианте осуществления настоящей заявки также предложена роботизированная система чистки, включающая в себя: робот-уборщик; базовую станцию 200, предназначенную для парковки робота-уборщика, причем базовая станция 200 может связываться с роботом-уборщиком; базовая станция 200 включает в себя: модуль сбора блоков для мытья полов, модуль подачи блоков для мытья полов, рабочие позиции для работы робота-уборщика. Причем модуль подачи блоков для мытья полов включает в себя модуль подачи блоков для мытья полов 236, причем модуль подачи блоков для мытья полов 236 включает в себя: первый поддерживающий механизм 201, установленный на оболочке 3 базовой станции; второй поддерживающий механизм 202, установленный на оболочке 3 базовой станции, причем первый поддерживающий механизм 201 имеет поддерживающее состояние, при котором поддерживает блок для мытья полов 310, и сложенное состояние, при котором не поддерживает блок для мытья полов 310. Второй поддерживающий механизм 202 имеет опорное состояние для поддерживания блока для мытья полов 310 в блоке хранения 210 и открытое состояние для высвобождения по крайней мере одного блока для мытья полов 310 в рабочую позицию. Второй поддерживающий механизм 202 поддерживает блок для мытья полов 310 в блоке хранения 210, когда он находится в опорном состоянии, причем первый поддерживающий механизм 201 находится в сложенном состоянии; когда второй поддерживающий механизм 202 находится в открытом состоянии, он высвобождает по крайней мере один блок для мытья полов 310 в рабочую позицию, причем первый поддерживающий механизм 201 находится в поддерживающем состоянии для поддерживания оставшихся блоков для мытья полов 310. Как правило, блок для мытья полов 310 включает в себя одноразовую швабру и моющуюся швабру. Предложенная в данном варианте осуществления система 300 робота-уборщика может быть совместима с одноразовой шваброй и моющейся шваброй, а блок хранения 210 может хранить одноразовую швабру и моющуюся швабру. В одном варианте осуществления, чтобы сделать блок хранения 210 совместимым с одноразовой шваброй и моющейся шваброй одновременно, необходимо внести некоторые улучшения в конструкцию самого блока хранения 210, чтобы блок хранения 210 мог по-прежнему обеспечивать повышенную стабильность работы, будучи совместимым со шваброй. В частности, увеличение зазора по длине и по ширине блока хранения 210 позволяет обеспечить согласованность блока для мытья полов больших размеров с блоком хранения 210, и когда в блоке хранения 210 размещено множество блоков для мытья полов 310, края блока для мытья полов 310 могут загибаться, обеспечивая таким образом возможность хранения блоков для мытья полов 310 в блоке хранения 210 за счет увеличения внутреннего зазора блока хранения 210. Наличие зазоров по обеим сторонам блока хранения 210 означает, что внутреннее пространство блока хранения 210 больше, чем фактические размеры блока для мытья полов 310. Вообще говоря, центральная область блока хранения 210 как раз выровнена с рабочей позицией, так что блок для мытья полов может быть более точно помещен в соответствующую рабочую позицию, поэтому при хранении блока для мытья полов 310 в блоке хранения, по мере возможности размещать блок для мытья полов 310 в центральной области блока хранения 210. В частности, во втором модуле хранения 212 хранится блок для мытья полов 310, подлежащий замене. Когда робот-уборщик 100 должен заменить блок для мытья полов, второй модуль хранения 212 предоставляет блок для мытья полов 310 во вторую рабочую позицию 252 для установки на роботе-уборщике, в частности, для того, чтобы блок для мытья полов 310 аккуратно помещался во вторую рабочую позицию, нужно обеспечить выпадение блока для мытья полов 310 из центральной области второго модуля хранения 212. В частности, как показано на рис. 29–32, контактная часть телескопического механизма перегородки, контактирующего с блоком для мытья полов 310, выполнена в виде наклонной плоскости, а часть блока для мытья полов 310, контактирующего с контактной частью, также выполнена в виде соответствующей наклонной плоскости, которая может прилагать на блок для мытья полов усилие, обеспечивающее перемещение к центральной области второго модуля хранения 212, чтобы блок для мытья полов 310 перемещался по мере возможности к центру под действием телескопических механизмов с обеих сторон и находился в центральной области второго модуля хранения 212. В других вариантах осуществления контактная часть телескопического механизма перегородки также может быть выполнена в другой форме, но при этом нужно обеспечить, что блок для мытья полов 310 подвергался усилиям, чтобы перемещаться в центральную область второго модуля хранения 212, понятно, что место контакта блока для мытья полов 310 подвергается соответствующему изменению. Понятно, что когда робот-уборщик 100 отсоединяет блок для мытья полов 310 от основного корпуса, ссылаясь на рис. 39, модуль сбора блоков для мытья полов должен собрать отсоединенный блок для мытья полов 310 и передать в первый модуль хранения, то есть собрать блок для мытья полов 310 за счет движения подъемного механизма в вертикальном направлении. В частности, для того, чтобы по мере возможности разместить собранный блок для мытья полов 310 в центральную область первого блока хранения 211, упор модуля сбора блоков для мытья полов должен быть выполнен с определенной фаской, чтобы блок для мытья полов 310 подвергался усилиям для перемещения к центральной области первого модуля хранения и по мере возможности разместился в центральной области первого модуля хранения. Конкретный принцип такой же, как и у телескопического механизма перегородки второго модуля хранения, поэтому здесь повторяться не будет. В одном варианте осуществления, на рис. 37 представлена схема второго модуля хранения 212, который может быть разделен на верхнюю часть и нижнюю часть. Верхняя часть снабжена подъемным узлом снаружи, причем верхняя часть в основном используется для размещения блока для мытья полов, а блок для мытья полов 310 перемещается во вторую рабочую позицию через нижнюю часть. В частности, краевая область блока для мытья полов 310, хранящегося во втором модуле хранения 212, может складываться или скручиваться, потому что она не поддерживается задней пластиной, и может застрять, когда она проваливается через нижнюю часть, что влияет на стабильность базовой станции 200. В частности, в данном варианте осуществления нижняя часть второго модуля хранения 212 имеет большее пространство, чем верхняя часть, так что блок для мытья полов 310 может полностью растягиваться при прохождении через нижнюю часть, уменьшая вероятность того, что блок для мытья полов 310 застревает и не может нормально упасть, а также повышая стабильность работы базовой станции. В данном варианте осуществления согласно рис. 14, блок для мытья полов 310 высвобождается из второго модуля хранения 212 через модуль подачи блоков для мытья полов, блок для мытья полов 310 перемещается в вертикальном направлении под действием модуля подачи блоков для мытья полов, причем направление движения блока для мытья полов 310 перпендикулярно направлению входа робота-уборщика 100 на станцию. В частности, блок для мытья полов 310 высвобождается из второго модуля хранения 212 во вторую рабочую позицию 252 базовой станции через модуль подачи блоков для мытья полов, а робот-уборщик 100 устанавливает блок для мытья полов 310, высвобожденный из второго модуля хранения 212 во второй рабочей позиции 252. В частности, блок для мытья полов 310 высвобождается, совершая движение в вертикальном направлении сверху вниз, в частности, блок для мытья полов 310 приводится в движение модулем подачи блоков для мытья полов, совершая свободное падение в вертикальном направлении. Преимущества вышеуказанной конструкции заключается в том: что благодаря конструктивному исполнению модуля подачи блоков для мытья полов, базовая станция может автоматически предоставлять блок для мытья полов для установки на роботе-уборщике, сокращая ручное участие и повышая степень автоматизации робота-уборщика. В одном варианте осуществления модуль подачи блоков для мытья полов высвобождает блок для мытья полов, заставляя блок для мытья полов перемещаться в вертикальном направлении, тем самым делая базовую станцию 200 компактной. В данном варианте осуществления базовая станция 200 также включает в себя опорную часть для соединения нижней пластины базовой станции 200 с блоком хранения 210 базовой станции, опорная часть расположена на стороне базовой станции 200, так что проекции корпуса и блока хранения 210 в горизонтальной плоскости примерно совпадают, когда робот-уборщик 100 припаркован, при этом опорная часть поддерживает базовую станцию 200, обеспечивая более прочную конструкцию базовой станции 200. За счет установки опорной части на стороне базовой станции 200 базовая станция 200 становится более компактной в горизонтальном направлении. В данном варианте осуществления базовая станция 200 включает в себя блок зарядки (на рисунке не показан), который включает в себя по крайней мере одну пару клемм зарядки, а блок зарядки включает в себя передатчик сигнала для отправки управляющего сигнала в робот-уборщик 100. После того, как робот-уборщик 100 обнаруживает, что уровень заряда меньше порогового значения, он направляется к базовой станции 200 в соответствии с заданным маршрутом, постоянно проверяя сигнал от блока зарядки во время движения, определяет положение базовой станции 200 в соответствии с сигналом и завершает стыковку и зарядку. В данном варианте осуществления клемма зарядки расположена в опорной части, после того, как робот-уборщик 100 входит на базовую станцию 200 и завершает стыковку, начинается зарядка, после зарядки робот-уборщик 100 покидает базовую станцию 200. В частности, когда робот-уборщик 100 возвращается на базовую станцию 200, компонент подключения 120 заставляет блок для мытья полов 310 подниматься с рабочей поверхности, чтобы предотвратить загрязнение очищенной рабочей поверхности. В других вариантах осуществления клемма зарядки также может быть расположена внизу блока хранения 210 базовой станции 200, чтобы верхняя часть робота-уборщика 100 контактировала с клеммой зарядки для совершения зарядки. В других вариантах осуществления в состав способов зарядки робота-уборщика 100 также входит беспроводная зарядка, блок зарядки включает в себя передающую катушку, робот-уборщик 100 включает в себя приемную катушку, а робот-уборщик 100 заряжается за счет электромагнитной индукции передающей катушки и приемной катушки. Установка блока зарядки на базовой станции 200 дает следующие положительные эффекты: благодаря интеграции функций базовой станции 200, функции базовая станция 200 используются повторно, а конструкция компактная. В данном варианте осуществления согласно рис. 39–40, второй модуль хранения 212 базовой станции 200 включает в себя блок контроля состояния хранения 360, который может обнаруживать текущее состояние блока для мытья полов 310 во втором модуле хранения 212 и отправлять инструкцию пользователю. В частности, может обнаруживать, что во втором модуле хранения отсутствует блок для мытья полов 310, и напоминать пользователям о необходимости вовремя добавить блок для мытья полов, чтобы не повлиять на стабильность работы базовой станции 200. Точно так же, первый модуль хранения 211 также включает в себя блок контроля состояния хранения, который определяет, что блок для мытья полов 310, помещенный в первый модуль хранения 211, достиг заданного значения, или определяет, что время хранения блока для мытья полов в первом модуле хранения 211 достигло заданного значения, и дает пользователю инструкцию обработать блок для мытья полов 310, в частности, когда количество блоков для мытья полов 310 больше или равно 9, дает пользователю инструкцию обработать блок для мытья полов 310. В одном варианте осуществления блок контроля состояния хранения 360 включает в себя фотоэлектрический датчик, который может использоваться для определения количества блоков для мытья полов, находящихся в модулях хранения, для определения того, что первый модуль хранения 211 был заполнен блоками для мытья полов, а также для определения того, что во втором модуле хранения 212 отсутствует блок для мытья полов. В частности, в первом модуле хранения 211 хранятся блоки для мытья полов 310, отсоединенные от основного корпуса робота-уборщика 100, а во втором модуле хранения 212 хранятся блоки для мытья полов 310, предназначенные для установки на роботе-уборщике 100, а когда первый модуль хранения 211 заполнен блоками для мытья полов 310, или во втором модуле хранения отсутствует блок для мытья полов 310, необходимый для установки на роботе-уборщике, базовая станция выдает соответствующую инструкцию. В частности, фотоэлектрический датчик включает в себя передающий конец и приемный конец, передающий конец расположен на одной стороне модуля хранения, а принимающий конец расположен в соответствующем положении на другой стороне модуля хранения, когда сигнал от передающего конца может быть принят принимающим концом, это означает, что между передающим и принимающим концами нет барьера. В частности, если необходимо определить, заполнен ли первый модуль хранения 211 блоками для мытья полов 310, то с одной стороны в верхней части первого модуля хранения 211 установить передатчик фотоэлектрического датчика, а с другой стороны – приемник фотоэлектрического датчика. Если первый модуль хранения 211 заполнен блоками для мытья полов 310, то когда передатчик передает сигнал, который не может быть принят приемником, потому что сигнал был блокирован блоком для мытья полов 310, находящимся в верхней части первого модуля хранения 211, отсюда видно, что первый модуль хранения 211 заполнен блоками для мытья полов 310. И, если необходимо определить наличие блока для мытья полов 310 во втором модуле хранения 212, предназначенного для установки на роботе-уборщике 100, то установить передающий конец фотоэлектрического датчика на дне второго модуля хранения 212 с одной стороны, и установить приемный конец в соответствующем месте с другой стороны, если во втором модуле хранения 212 отсутствует блок для мытья полов 310, необходимый для установки, то когда передающий конец фотоэлектрического датчика выдает сигнал, приемный конец может принять данный сигнал, поскольку в центре нет блока для мытья полов, который мог бы преградить сигнал, отсюда считается, что во втором модуле хранения 212 нет блока для мытья полов 310, предназначенного для установки на роботе-уборщике 100. В других вариантах осуществления фотоэлектрический датчик может быть установлен в других местах. Например, если необходимо определить, что количество блоков для мытья полов 310 в блоке хранения 210 меньше 2, то можно установить фотоэлектрический датчик в месте, где второй блок для мытья полов укладывается в блоке хранения 210. Если принимающий конец не обнаруживает сигнал, это означает, что количество блоков для мытья полов 310 в блоке хранения больше или равно 2; в противном случае это означает, что количество блоков для мытья полов 310 в блоке хранения меньше 2. В частности, в данном варианте осуществления базовая станция может отправлять команду по следующим способам, обмениваясь данными с мобильными устройствами (например, мобильными телефонами, компьютерами, IPAD и т.д.), чтобы отправлять пользователю команду, напоминая ему о необходимости своевременно очистить базовую станцию или о необходимости добавить блок для мытья полов. В других вариантах осуществления базовая станция включает в себя индикатор, который может напоминать пользователю о выполнении соответствующих операций с базовой станцией путем излучения светового и звукового сигнала. В данном варианте осуществления согласно рис. 22, блок хранения 210 на базовой станции 200 съемный. На рис. 22 показано состояние, в котором второй модуль хранения 212 отсоединен от базовой станции 200, в частности, первый и второй модули хранения 212 блока хранения 210 могут быть отсоединены от базовой станции 200 соответственно. Когда пользователям необходимо добавить блок для мытья полов 310, или удалить блок для мытья полов 310 из блока хранения 210, или очистить блок для мытья полов 310 из блока хранения 210, как правила, они могут разместить блок хранения 210 в подходящее место в соответствии со своими потребностями, отсоединив блок хранения 210 от базовой станции 200. В частности, блок хранения 210 может быть выполнен с возможностью съемки из базовой станции 200, используя различные распространенные механические конструктивные исполнения, такие как паз, магнитное адсорбирование, что здесь повторяться не будет. В данном варианте осуществления робот-уборщик 100 включает в себя различные датчики, которые подходят для выполнения соответствующих действий при обнаружении различных ситуаций. Как правило, робот-уборщик 100 выполняет работу в рабочей зоне после установки блока для мытья полов 310, но когда на роботе-уборщике 100 не установлен блок для мытья полов 310, он не может выполнять операции уборки, чтобы предотвратить непоправимое повреждение рабочей поверхности и робота-уборщика 100. В данном варианте робот-уборщик 100 имеет датчик обнаружения установки блока для мытья полов, при обнаружении наличия на роботе-уборщике 100 блока для мытья полов он выполняет операции уборки в рабочей зоны, а когда было обнаружено, что на роботе-уборщике 100 не установлен блок для мытья полов, он прекращает работу и выдает пользователю команду о неисправности, чтобы не повредить рабочую поверхность или сам робот-уборщик 100. В частности, данный датчик обнаружения включает в себя датчик Холла, а в блоке для мытья полов 310 предусмотрен магнит, Датчик Холла определяет, установлен ли блок для мытья полов 310 на роботе-уборщике 100 путем проверки наличия магнита. При обнаружении магнита, то считается, что блок для мытья полов установлен на роботе-уборщике 100 и робот-уборщик 100 может выполнять работу; если датчик Холла не обнаруживает наличие магнита, то считается, что блок для мытья полов 310 не установлен на роботе-уборщике 100, а робот-уборщик не выполняет операции уборки и выдает пользователю команду о неисправности. Ссылаясь на рис. 5 и рис. 6. На рис. 5 представлена схематическая диаграмма робота-уборщика 100 без блока для мытья полов 310, а на рис. 6 представлена схематическая диаграмма робота-уборщика 100 с установленным блоком для мытья полов 310. В частности, датчик обнаружения установки блока для мытья полов расположен на роботе-уборщике 100, еще более в частности, данный датчик обнаружения установлен в компоненте подключения, блок для мытья полов 310 устанавливается на роботе-уборщике 100 через компонент подключения, компонент подключения снабжен датчиком Холла, блок для мытья полов снабжен магнитным элементом, и когда датчик Холла приближается к магнитному элементу, датчик Холла может обнаруживать изменение магнитного поля, определять напряженность магнитного поля, определять, установлен ли на роботе-уборщике блок для мытья полов 310, и передавать результаты обнаружения в блок управления, а робот-уборщик 100 соответственно управляет своей собственной логикой работы. Робот-уборщик 100 возвращается на базовую станцию 200, чтобы заменить блок для мытья полов, при достижении определенных заданных условий, но есть вероятность отказа в процессе замены блока для мытья полов. Чтобы проинформировать пользователя о необходимости своевременно принять соответствующие меры по исправлению неисправности, когда робот-уборщик 100 не может заменить блок для мытья полов, в данном варианте осуществления, ссылаясь на рис. 38, базовая станция 200 снабжена датчиком обнаружения неисправности 350, выдает пользователю команду о неисправности, когда обнаруживается неисправность передачи. В частности, в основном можно обнаруживать следующие неисправности: датчик обнаружения неисправности 350 обнаруживает, что модуль сбора блоков для мытья полов не смог собрать блок для мытья полов 310, отсоединенный от робота-уборщика 100 в первый модуль хранения 211, или модуль подачи блоков для мытья полов не смог передать блок для мытья полов 310 из второго модуля хранения 212 в робот-уборщик 100 для установки, а также, блок передачи не сработал нормально. В частности, в одном варианте осуществления датчик обнаружения неисправности 350 включает в себя инфракрасный датчик для определения того, нормально ли опускается блок для мытья полов 310 из первого модуля хранения 211, в частности, инфракрасный датчик расположен на опорной части базовой станции, и когда блок для мытья полов 310 не падает, инфракрасный датчик не может обнаружить отраженные инфракрасные лучи, а когда блок для мытья полов 310 падает, инфракрасные лучи отражаются и могут быть обнаружены, после въезда робота на базовую станцию, если инфракрасный датчик не обнаруживает инфракрасные сигналы, то считается, что второй модуль хранения 212 не смог передать блок для мытья полов 310 во вторую рабочую позицию, при этом пользователь получает напоминание о наличии неисправности на базовой станции, чтобы принять соответствующие операции. Робот-уборщик 100 выполняет уборочные работы в рабочей зоне. В процессе работы блок для мытья полов 310, установленный на роботе-уборщике 100, постепенно загрязняется и нуждается в замене. В процессе уборки робот-уборщик 100 непрерывно определяет рабочее состояние с помощью датчиков. При обнаружении/получении инструкции замены, указывающей на то, что он должен возвращаться на базовую станцию 200, чтобы заменить блок для мытья полов 310, робот-уборщик 100 отправляется к базовой станции 200 для осуществления замены блока для мытья полов. В частности, робот-уборщик 100 включает в себя датчик степени загрязнения блока для мытья полов 310 (на рисунке не показан), который непрерывно определяет степень загрязнения блока для мытья полов 310, установленного на роботе-уборщике 100 в процессе работы, и генерирует инструкцию замены, когда обнаружено, что степень загрязнения достигает порогового значения, под контролем блока управления робот-уборщик 100 отправляется к базовой станции 200 для замены блока для мытья полов 310. В частности, пользователь может предварительно установить рабочую площадь, рабочее время и график работы робота-уборщика 100, когда робот-уборщик 100 обнаруживает, что удовлетворяется по крайней мере одно из вышеперечисленных условий, он сгенерирует инструкцию замены, согласно которой робот-уборщик 100 возвращается на базовую станцию 200. В частности, когда робот-уборщик 100 отправляется к базовой станции 200, блок управления контролирует компонент подключения 120, заставляя блок для мытья полов 310 оторваться от земли, чтобы грязный блок для мытья полов 310 не загрязнил очищенную рабочую поверхность, когда возвращается робот-уборщик 100. В частности, робот-уборщик 100 возвращается на базовую станцию 200 согласно предварительно установленному пользователем маршруту. В данном варианте осуществления пользователь может задавать рабочее время, рабочую площадь, график работы и другие рабочие условия робота-уборщика 100 различными способами. В данном варианте осуществления робот-уборщик 100 включает в себя панель управления, имеющий соответствующие функции настройки, пользователь может установить условия работы робота-уборщика 100, настроив панель управления. В частности, робот-уборщик 100 включает в себя блок связи. Блок связи установлен на оболочке робота-уборщика 100 и взаимодействует со схемой управления робота-уборщика 100. В частности, пользователь может установить беспроводную связь с роботом-уборщиком 100, используя подходящее мобильное устройство, так что пользователь может задать соответствующие условия работы для робота-уборщика 100, сделав соответствующие настройки на мобильном устройстве. В данном варианте осуществления мобильное устройство представляет собой мобильное устройство любого типа, такое как мобильный телефон, смартфон, КПК, планшетный компьютер, компьютерное устройство для ношения на запястье, включающее в себя один или несколько процессоров, машиночитаемый носитель для хранения программных приложений, устройство ввода (например, клавиатура, сенсорный экран, микрофон и т.д.), устройство вывода (например, экран дисплея, динамик и т.д.), интерфейс связи и т.д. Блок связи робота-уборщика 100 адаптирован для связи с одним или несколькими мобильными устройствами через подходящую беспроводную сеть (например, беспроводную локальную сеть). В данном варианте осуществления робот-уборщик 100 возвращается на базовую станцию 200 после обнаружения команды о замене, и после того, как робот-уборщик 100 достигает базовая станция 200, он определяет, следует ли отсоединить блок для мытья полов 310 или установить блок для мытья полов 310, определив его собственное положение. В частности, робот-уборщик 100 включает в себя датчик определения положения, при обнаружении того, что он в настоящее время находится в первой рабочей позиции 251, под контролем блока управления блок для мытья полов 310 отсоединяется от робота-уборщика 100, и при обнаружении того, что он в настоящее время находится во второй рабочей позиции 252, под контролем блока управления робот-уборщик 100 устанавливает блок для мытья полов 310. В частности, датчик определения положения включает в себя фотоэлектрический переключатель, передатчик установлен на роботе, а приемник установлен в соответствующей рабочей позиции базовой станции, согласно полученному сигналу приемник определяет, достиг ли робот заданной позиции. В частности, когда фотоэлектрический выключатель обнаруживает, что робот-уборщик достигает первой рабочей позиции, робот-уборщик отсоединяет блок для мытья полов в первую рабочую позицию; когда фотоэлектрический выключатель обнаруживает, что робот-уборщик достиг второй рабочей позиции, робот-уборщик устанавливает блок для мытья полов. В частности, когда робот-уборщик достигает соответствующей рабочей позиции, робот-уборщик останавливается для выполнения соответствующего действия, а когда заданное действие завершено, он продолжает двигаться для выполнения последующих заданных действий. В частности, робот-уборщик также включает в себя датчик столкновения. Обнаружив столкновение с базовой станцией, робот-уборщик может, по крайней мере, частично судить, достиг ли робот-уборщик второй рабочей позиции, согласно результатам обнаружения. В данном варианте осуществления робот-уборщик 100 включает в себя датчик измерения расстояния, предназначенный для определения относительного расстояния между роботом-уборщиком 100 и базовой станцией 200 и определения текущего положения робота-уборщика 100, в частности, датчик измерения расстояния робота-уборщика 100 включает в себя по крайней мере один из инфракрасного датчика, лазерного датчика, ультразвукового датчика и т.д. В частности, базовая станция 200 включает в себя, по крайней мере, один из инфракрасного передатчика, лазерного передатчика, ультразвукового передатчика и т.д. Соответствующий датчик на роботе-уборщике 100 контролирует сигнал от базовой станции 200 для определения местоположения. В частности, хотя в данном варианте осуществления базовая станция 200 снабжена передатчиком сигнала, а робот-уборщик 100 снабжен соответствующим датчиком обнаружения, это не следует рассматривать как ограничение настоящего изобретения в частности, передатчик сигнала также может быть установлен на роботе-уборщике 100, и соответствующий датчик также может быть установлен на базовой станции 200, и даже в некоторых случаях передатчик сигнала и соответствующие датчики могут быть установлены на роботе-уборщике 100, можно контролировать местоположение за счет отражения базовой станции 200. В одном конкретном варианте осуществления согласно рис. 16, предполагая, что направление, в котором робот-уборщик 100 входит на базовую станцию, является направлением длины, а направление, перпендикулярное направлению длины в горизонтальной плоскости, является направлением ширины, то ширина базовой станции 200 больше, чем ширина робота-уборщика 100. В частности, как показано на рис. 19–21, поскольку ширина базовой станции 200 больше, чем ширина робота-уборщика 100, робот-уборщик 100 может входить и останавливаться на базовой станции 200. В частности, поскольку ширина базовой станции 200 больше, чем ширина робота, датчики и другие компоненты могут быть установлены в свободном пространстве базовой станции с обеих сторон. В частности, поскольку ширина базовой станции больше ширины робота, когда робот входит на базовую станцию 200, положение робота может отклоняться, не выравниваясь с рабочей позицией на базовой станции для размещения блока для мытья полов. В частности, базовая станция также снабжена направляющей конструкцией с обеих сторон, чтобы робот точно выровнялся с базовой станцией. В одном конкретном варианте осуществления по крайней мере один набор вспомогательных направляющих структур расположен соответственно на двух внутренних боковых стенках базовой станции 200, которые используются для контакта с двумя боковыми стенками робота-уборщика, чтобы направлять робот-уборщик точно вернуться на рабочую позицию. Вспомогательные направляющие структуры могут быть выполнены в разных формах, могут быть вспомогательными направляющими колесами или вспомогательными направляющими рельсами, как показано на рис. 34–35. Например, на двух внутренних боковых стенках базовой станции установить по одному ряду параллельных вспомогательных направляющих колес 290 соответственно, когда робот возвращается на базовую станцию для замены блока для мытья полов, две боковые стенки робота контактируют со вспомогательными направляющими колесами 290 на двух внутренних боковых стенках базовой станции, помогая роботу точно вернуться в рабочую позицию и уменьшая при этом диапазон колебания робота влево и вправо. Под совместным действием передатчика сигнала базовой станции 200 и вспомогательных направляющих колес 290 робот может плавно и точно вернуться в рабочую позицию, уменьшая погрешность возврата робота на базовую станцию и обеспечивая погрешность оси робота и оси базовой станции в пределах 8-15мм. В одном конкретном варианте осуществления высота вспомогательного направляющего колеса 290 равна 1/3-1/2 высоты робота-уборщика 100, то есть вспомогательное направляющее колесо 290 расположено посередине или внизу посередине высоты боковой стенки робота-уборщика, и установка вспомогательной направляющей конструкции в этом месте может помочь роботу двигаться более стабильно, но ее можно установить на другой высоте боковой стенки, где можно обеспечить стабильную направляющую роль. Две боковые стенки базовой станции – это две боковые стенки робота-уборщика в направлении входа на станцию. В другом конкретном варианте осуществления можно не установить вспомогательную направляющую конструкцию непосредственно на боковой стенке, а установить выступные пластинчатые конструкции на нижней пластине возле боковой стенки с обеих сторон, на пластинчатых конструкциях установить направляющие колеса или направляющие рельсы, обращенные к роботу, чтобы направлять движение робота. В обоих вышеперечисленных вариантах осуществления принята схема ограничения движения корпуса с обеих сторон робота. Однако в других вариантах осуществления можно принять схему ограничения ходовых колес робота, например, установить направляющие канавки на нижней пластине робота в местах, соответствующих ходовым колесам, для вспомогательного направления ходовых колес робота, обеспечивая точное поступление в рабочую позицию. В данном варианте осуществления базовая станция 200 также снабжена операционной частью, и пользователь может управлять действием робота-уборщика 100, управляя операционной частью. В частности, робот-уборщик 100 обычно имеет панель управления, и пользователь может управлять действием робота-уборщика 100 через панель управления робота 100, как правило, панель операций устанавливается на верхней поверхности робота. Когда робот-уборщик 100 заезжает на базовую станцию 200, верхняя поверхность робота покрывается базовой станцией 200, в это время очень неудобно работать с панелью операций робота-уборщика 100, в это время нужно вывести робот-уборщик из базовой станции. Следовательно, в данном варианте осуществления базовая станция 200 снабжена операционной частью, можно вывести робот из базовой станции и/или выполнить соответствующие действия, работая с операционной частью на базовой станции. В одном варианте осуществления, если необходимо вывести робот-уборщик 100 из базовой станции 200, то с помощью соответствующих функциональных кнопок в операционной части базовой станции 200, робот-уборщик 100 покидает базовую станцию для выполнения операций уборки. В одном варианте осуществления на корпусе робота-уборщика 100 установлен съемный батарейный блок. Когда пользователю нужно демонтировать батарейный блок, если робот-уборщик 100 находится на базовой станции 200 в это время, то с помощью операционной части на базовой станции можно вывести робот-уборщик 100 из базовой станции, чтобы он прекратил работу для удобства снятия пользователем батарейного блока. В одном варианте осуществления робот-уборщик 100 снабжен баком для воды, который может обеспечивать водой блок для мытья полов 310, чтобы осуществить влажную уборку, когда в баке осталось мало воды, пользователь должен добавить воду в бак, в это время, если робот-уборщик 100 находится на базовой станции, пользователь может с помощью операционной части на базовой станции вывести робот-уборщик из базовой станции 200 и припарковать за пределами базовой станции, чтобы пользователь мог снять и установить бак для воды. В одном варианте осуществления, ссылаясь на рис. 36, операционная часть базовой станции имеет первый операционный элемент 320 и второй операционный элемент 330, когда нужно вывести робот-уборщик 100 из базовой станции, при нажатии на первый операционный элемент 320 на базовой станции 200 робот 100 выезжает из базовой станции и продолжает уборку в рабочей зоне; при нажатии на второй операционный элемент 330 на базовой станции 200 робот-уборщик 100 выезжает из базовой станции 200 и останавливается за пределами базовой станции, чтобы пользователь снял/установил батарейный блок, снял/установил бак для воды и т.д. В одном варианте осуществления настоящего изобретения робот-уборщик 100 снабжен защитным кожухом спереди, а датчик столкновения расположен в защитном кожухе. Когда робот 100 встречает препятствия во время движения, защитный кожух может первой соприкасаться с препятствиями, чтобы обнаруживать наличие препятствия, с которым может встречаться робот во время движения, и в то же время она может служить буфером, когда робот сталкивается с препятствиями, предотвращая повреждение корпуса робота 100 от сильного удара. В одном конкретном варианте осуществления когда защитный кожух обнаруживает препятствия во время движения робота 100 в рабочей зоне, робот 100 корректирует собственное направление своего движения, чтобы обойти препятствия впереди, например, когда защитный кожух робота 100 обнаруживает наличие препятствий впереди слева, робот поворачивается на 45 градусов вправо, чтобы обойти препятствия впереди слева. Когда робот 100 входит на базовую станцию 200, робот 100 отключает функцию защитного кожуха, то есть, когда защитный кожух касается боковой стенки базовой станции 200, робот 100 не будет часто корректировать свое направление движения, таким образом облегчая плавную стыковку робота 100 с базовой станцией 200 и возвращение в правильную рабочую позицию. В других вариантах осуществления детектор положения робота-уборщика 100 также включает в себя датчик контроля магнитного поля, такой как датчик Холла, который контролирует магнитные элементы на базовой станции 200 для определения его относительного положения с базовой станцией 200. В частности, когда робот-уборщик 100 обнаруживает первый магнит на базовой станции 200, считается, что робот-уборщик 100 достиг первой рабочей позиции 251; когда робот-уборщик 100 обнаруживает второй магнит на базовой станции 200, считается, что робот-уборщик 100 достиг второй рабочей позиции 252. В частности, первый магнит расположен близко к первой рабочей позиции 251 базовой станции 200, а второй магнит расположен близко ко второй рабочей позиции 252 базовой станции 200. В частности, местоположение магнитов здесь может быть определено по мере необходимости, но не ограничено одним. В частности, хотя в данном варианте осуществления магнит установлен на базовой станции 200, датчик Холла установлен на роботе-уборщике 100, но это только один вариант осуществления настоящего изобретения, его не следует рассматривать как ограничение содержания настоящего изобретения. В данном варианте осуществления, когда датчик определения положения определяет, что робот-уборщик 100 достигает первой рабочей позиции 251, под контролем блока управления компонент подключения 120 двигается таким образом, чтобы блок для мытья полов 310 отсоединился от основного корпуса робота-уборщика 100, а блок для мытья полов 310 перемещается под действием модуля сбора блоков для мытья полов, чтобы блок для мытья полов 310 собрался в первом модуле хранения 211; модуль подачи блоков для мытья полов извлекает блок для мытья полов 310 из второго модуля хранения 212, а блок для мытья полов 310 перемещается под действием модуля подачи блоков для мытья полов, чтобы предоставить блок для мытья полов 310 роботу-уборщику 100 для установки. Когда датчик положения определяет, что робот-уборщик 100 достиг второй рабочей позиции 252, под контролем блока управления компонент подключения 120 двигается для установки блока для мытья полов 310. В данном варианте осуществления способ замены роботом-уборщиком 100 блока для мытья полов включает: ссылаясь на рис. 25, на рис. 25 представлена блок-схема замены блока для мытья полов на роботе-уборщике в данном варианте осуществления. Перед выполнением роботом-уборщиком 100 уборки, датчик обнаружения установки блока для мытья полов определяет, установлен ли блок для мытья полов 310 на роботе-уборщике 100, если результат контроля показал, что блок для мытья полов 310 не установлен, то робот-уборщик 100 отправляет пользователю команду о неисправности, если результат контроля показал, что блок для мытья полов 310 установлен, то блок управления робота-уборщика 100 управляет компонентом подключения 120, чтобы отрегулировать высоту блока для мытья полов 310 от пола, так что блок для мытья полов 310 контактирует с полом для выполнения уборки. В данном варианте осуществления, прежде чем робот-уборщик прибудет на базовую станцию, базовая станция должна подготовиться к прибытию робота. В частности, робот-уборщик и базовая станция соответственно снабжены блоками связи, через которые робот-уборщик и базовая станция могут общаться. В частности, робот-уборщик может информировать базовую станцию о необходимости зарядки или замены блока для мытья полов до того, как робот-уборщик вернется на базовую станцию, в частности, когда робот-уборщик будет заменять блок для мытья полов, базовая станция должна подготовиться к замене блока для мытья полов. Перед тем, как робот-уборщик входит на базовую станцию, модуль сбора блоков для мытья полов должен быть готов к сбору грязного блока для мытья полов, а модуль подачи блоков для мытья полов передает чистый блок для мытья полов во вторую рабочую позицию для выполнения замены роботом-уборщиком. В частности, робот-уборщик и базовая станция общаются через инфракрасный порт. Робот-уборщик 100 перемещается в рабочей зоне в соответствии с заданным маршрутом, чтобы эффективно очистить рабочую зону, обнаруживает сильно загрязненные участки и участки со стойкими пятнами в процессе уборки и сосредотачивает усилия для их снятия, в процессе уборки обнаруживает наличие края пропасти, препятствий и т.д., принимает соответствующие меры избегания. После того, как робот-уборщик 100 выполнил некоторые работы по уборке в рабочей зоне, текущий блок для мытья полов 310 постепенно загрязнялась. Если для очистки рабочей поверхности использовать грязный блок для мытья полов 310, то эффект очистки может сильно снизиться. В то же время грязный блок для мытья полов 310 может загрязнять очищенную поверхность. Робот-уборщик 100 возвращается на базовую станцию 200 для замены блока для мытья полов 310 при получении инструкции о замене, указывающей на то, что робот-уборщик 100 должен возвращаться на базовую станцию 200 во время работы в рабочей зоне, см. рис. 19. Робот-уборщик 100 включает в себя датчик контроля состояния блока для мытья полов, который контролирует степень загрязнения блока для мытья полов 310, установленного на роботе-уборщике 100. Когда обнаруживается, что степень загрязнения установленного в данный момент блока для мытья полов 310 достигает порогового значения, блок управления генерирует команду о замене и управляет роботом-уборщиком 100, чтобы он вернулся на базовую станцию 200; в одном варианте осуществления робот-уборщик 100 включает в себя блок связи, с помощью которого может связываться с мобильными устройствами (такими как смартфоны и Ipad) через подходящую беспроводную сеть. Пользователи могут удаленно устанавливать рабочее время, рабочую площадь, графики работы робота-уборщика 100 с помощью мобильных устройств, а пользователи также могут выполнять соответствующие настройки через панель управления робота-уборщика 100. Когда блок для мытья полов 310, используемый в настоящее время на роботе-уборщике 100, достигает заданного пользователем рабочего времени, рабочей площади или графика работы, блок управления генерирует инструкцию замены и управляет роботом-уборщиком 100, чтобы он вернулся на базовую станцию 200 для замены блока для мытья полов. Робот-уборщик 100 возвращается на базовую станцию 200 для замены блока для мытья полов 310, этот процесс включает в себя следующее: робот-уборщик 100 возвращается на базовую станцию 200 и отсоединяет блок для мытья полов 310. Возвращение робота-уборщика 100 на базовую станцию 200 и отсоединение блока для мытья полов включают в себя следующее: робот-уборщик 100 включает в себя датчик определения положения для определения того, достиг ли робот-уборщик 100 в настоящее время первой рабочей позиции 251 на нижней пластине базовой станции. В частности, датчик определения положения включает в себя датчик измерения расстояния, который измеряет относительное расстояние между роботом-уборщиком 100 и базовой станцией 200, чтобы определить, достиг ли робот-уборщик 100 первой рабочей позиции 251. В частности, датчик определения положения включает в себя датчик обнаружения Холла, который определяет, достиг ли робот-уборщик 100 первой рабочей позиции 251, путем обнаружения наличия магнитов на базовой станции 200. Робот-уборщик 100 определяет, что он достиг первой рабочей позиции 251 базовой станции 200, ссылаясь на рис. 20, под контролем блока управления блок для мытья полов 310 отсоединяется от корпуса робота-уборщика 100, и блок для мытья полов 310 опускается в первую рабочую позицию 251 на нижней пластине базовой станции. Робот-уборщик 100 возвращается на базовую станцию 200 для замены блока для мытья полов 310, этот процесс включает в себя сбор блока для мытья полов 310 на базовой станции 200. Сбор блока для мытья полов 310 на базовой станции 200 включает в себя следующее: модуль сбора блоков для мытья полов 231 перемещается вертикально, чтобы подобрать блок для мытья полов 310, в частности, подъемный механизм 232 модуля сбора блоков для мытья полов 231 перемещается вертикально вниз, чтобы приблизиться к блоку для мытья полов 310, адсорбционный блок 233 модуля сбора блоков для мытья полов 231 соединен с блоком для мытья полов 310, а модуль сбора блоков для мытья полов 231 приводит в движение блок для мытья полов 310 вертикально вверх, чтобы собрать блок для мытья полов 310 в первый модуль хранения 211. Робот-уборщик 100 возвращается на базовую станцию 200 для замены блока для мытья полов 310, этот процесс включает в себя подачу блока для мытья полов 310 на базовой станции 200. Процесс подачи блока для мытья полов 310 на базовой станции 200 включают в себя следующее: слайдер модуля подачи блоков для мытья полов перемещается в заданном направлении, чтобы зафиксировать или высвободить блок для мытья полов 310 во втором модуле хранения 212, в частности, двигатель приводит в движение компонент передачи в заданном направлении, перемещая слайдер 242 из первого положения во второе положение. Когда слайдер 242 находится в первом положении, модуль подачи блоков для мытья полов фиксирует блок для мытья полов 310, а когда слайдер 242 находится во втором положении, модуль подачи блоков для мытья полов высвобождает блок для мытья полов 310. Благодаря модулю подачи блоков для мытья полов блок для мытья полов 310 передается из второго модуля хранения 212 на нижнюю пластину базовой станции для установки на роботе-уборщике 100. Робот-уборщик 100 возвращается на базовую станцию 200 для замены блока для мытья полов 310, этот процесс включает в себя следующее: робот-уборщик 100 возвращается на базовую станцию 200 и устанавливает блок для мытья полов 310. Возвращение робота-уборщика 100 на базовую станцию 200 и установка блока для мытья полов 310, см. рис. 21, включают в себя следующее: как упоминалось выше, робот-уборщик 100 включает в себя датчик измерения расстояния или датчик обнаружения Холла, робот-уборщик 100 определяет, что он достиг второй рабочей позиции 252 базовой станции 200, а блок управления управляет компонентом подключения 120 для установки блока для мытья полов 310. В данном варианте осуществления, когда робот-уборщик 100 определит, что он достиг первой рабочей позиции, он отсоединяет блок для мытья полов от основного корпуса, далее продолжает движение, пока не достигнет второй рабочей позиции, где робот-уборщик устанавливает блок для мытья полов, извлеченный модулем подачи блоков для мытья полов из второго модуля хранения, после завершения установки, робот покидает базовую станцию, при этом, модуль сбора блоков для мытья полов собирает блок для мытья полов, отсоединенный от основного корпуса робота. Или, когда робот-уборщик достигает первой рабочей позиции, он отсоединяет блок для мытья полов, после этого робот-уборщик покидает базовую станцию, а модуль сбора блоков для мытья полов собирает блок для мытья полов, отсоединенный от основного корпуса робота, в это время робот снова заезжает на базовую станцию, когда робот достигает второй рабочей позиции, он устанавливает блок для мытья полов, извлеченный модулем подачи блоков для мытья полов из второго модуля хранения. После завершения установки робот покидает базовую станцию. В данном варианте осуществления второй модуль хранения 212 установлен перед первым модулем хранения 211 относительно направления входа робота, когда робот-уборщик 100 входит на базовую станцию 200 для замены блока для мытья полов, он сначала приближается к первому модулю хранения, далее продолжает движения, приближаясь ко второму модулю хранения. В других вариантах осуществления первый модуль хранения может быть установлен перед вторым модулем хранения, когда робот-уборщик входит на базовую станцию 200 для замены блока для мытья полов, он сначала приближается ко второму модулю хранения, далее и продолжает движение, приближаясь к первому модулю хранения. В данном варианте осуществления вторая рабочая позиция установлена перед первой рабочей позицией относительно направления входа робота на базовую станцию, когда робот-уборщик входит на базовую станцию, он сначала достигает первой рабочей позиции, а затем продолжает движение, пока не достигнет второй рабочей позиции. В других вариантах осуществления первая рабочая позиция установлена перед второй рабочей позицией относительно направления входа робота-уборщика на базовую станцию, когда робот-уборщик входит на базовую станцию, он сначала достигает второй рабочей позиции, а затем продолжает движение, пока не достигнет первой рабочей позиции. В данном варианте осуществления вторая рабочая позиция и второй модуль хранения расположены в вертикальном направлении наверху и внизу соответственно друг другу, а первая рабочая позиция и первый модуль хранения расположены в вертикальном направлении наверху и вниз соответственно друг другу. После того, как робот-уборщик достигает первой рабочей позиции, робот-уборщик отсоединяет блок для мытья полов от основного корпуса и заставляет блок для мытья полов перемещаться вертикально через блок передачи, чтобы передать блок для мытья полов в первый модуль хранения. После того, как робот достигает второй рабочей позиции, под воздействием блока передачи блок для мытья полов во втором модуле хранения высвобождается и перемещается в вертикальном направлении, чтобы передать блок для мытья полов роботу-уборщику для установки. В других вариантах осуществления блок хранения и рабочая позиция могут быть не расположены в вертикальном направлении соответственно друг другу, блок для мытья полов частично поворачивается в вертикальном направлении под действием блока передачи, осуществляя передачу блока для мытья полов. Вышеупомянутые варианты осуществления имеют следующие преимущества: робот-уборщик 100 автоматически отсоединяет/устанавливает блок для мытья полов 310, базовая станция 200 заставляет блок для мытья полов 310 перемещаться в вертикальном направлении за счет действия модуля сбора блоков для мытья полов, таким образом автоматически собирая грязный блок для мытья полов 310 в первый модуль хранения 211 базовой станции 200, с помощью модуля подачи блоков для мытья полов базовая станция 200 передает роботу-уборщику 100 на установку блок для мытья полов 310 из второго модуля хранения 212. Благодаря наличию модуля подачи блоков для мытья полов и модуля сбора блоков для мытья полов процесс подачи и сбора блока для мытья полов 310 стал удобным и простым. В то же время базовая станция выполнена компактной за счет проектирования позиционной взаимосвязи между рабочей позицией робота-уборщика 100 и блоком хранения 210. Кроме того, благодаря интегрированному исполнению блока заряда на базовой станции 200, базовая станция робота-уборщика 100 может использоваться как для замены блока для мытья полов 310, так и в качестве зарядной станции, реализуя повторное использование функций, обеспечивая простую конструкцию и снижая стоимость. На рис. 23 представлен еще один вариант осуществления базовой станции 200 настоящего изобретения. В данном варианте осуществления базовая станция 200 включает в себя блок хранения 210, предназначенный для хранения блока для мытья полов 310, причем блок хранения 210 включает в себя первый модуль хранения 211 и второй модуль хранения 212, где первый модуль хранения 211 используется для хранения грязного блока для мытья полов 310, отсоединенного из робота-уборщика 100, второй модуль хранения 212 используется для хранения чистого блока для мытья полов 310 для установки на роботе-уборщике 100, первый модуль хранения 211 и второй модуль хранения 212 располагаются на базовой станции 200 рядом друг с другом. В частности, днища первого модуля хранения 211 и второго модуля хранения 212 примерно расположены в одной плоскости. В данном варианте осуществления первый модуль хранения 211 расположен перед вторым модулем хранения 212 относительно направления входа робота-уборщика 100 на станцию, то есть когда робот-уборщик 100 возвращается на базовую станцию 200, он сначала приближается ко второму модулю хранения 212, и робот-уборщик 100 продолжает движение по направлению входа на станцию, приближаясь к первому модулю хранения 211. В данном варианте осуществления базовая станция 200 включает в себя блок передачи, предназначенный для передачи блока для мытья полов 310, в частности, блок передачи включает в себя модуль сбора блоков для мытья полов, чтобы автоматически передать блок для мытья полов 310, отсоединенный от робота-уборщика 100, в первый модуль хранения 211, реализуя хранение блока для мытья полов 310, кроме того, блок передачи включает в себя модуль подачи блоков для мытья полов, чтобы автоматически передать в робота-уборщика 100 на установку блок для мытья полов 310 из второго модуля хранения 212. В других вариантах осуществления первый модуль хранения 211 и второй модуль хранения 212 также могут быть расположены в вертикальном направлении на базовой станции 200, в частности, первый модуль хранения 211 и второй модуль хранения 212 расположены в вертикальном направлении наверху и внизу соответственно, в одном варианте осуществления первый модуль хранения 211 и второй модуль хранения 212 расположены в одном отсеке хранения, выборочно, первый модуль хранения 211 расположен под отсеком хранения, а второй модуль хранения 212 расположен над отсеком хранения, выборочно, существует перегородка между первым модулем хранения 211 и вторым модулем хранения 212 для разделения первого модуля хранения 211 от второго модуля хранения 212, чтобы предотвратить загрязнение грязным блоком для мытья полов 310 чистого блока для мытья полов 310, преимущество такого исполнения заключается в повышения эффективности использования пространства. В данном варианте осуществления базовая станция 200 включает в себя рабочие позиции для парковки робота-уборщика 100. В частности, рабочие позиции включают в себя первую рабочую позицию 251, когда робот-уборщик 100 входит на базовую станцию 200 и достигает первой рабочей позиции 251, под контролем блока управления компонент подключения 120 отсоединяет блок для мытья полов, подключенный к основному корпусу робота-уборщика 100, от основного корпуса робота-уборщика 100; при этом рабочие позиции включают в себя вторую рабочую позицию 252, где робот-уборщик 100 устанавливает блок для мытья полов 310, предоставленный базовой станцией 200. В частности, вторая рабочая позиция 252 расположена перед первой рабочей позицией относительно направления входа робота-уборщика 100 на станцию. Причем второй модуль хранения 212 расположен в вертикальном направлении второй рабочей позиции 252, в частности, второй модуль хранения 212 расположен над второй рабочей позицией 252, а блок для мытья полов 310 из второго модуля хранения 212 перемещается в вертикальной плоскости под действием модуля подачи блоков для мытья полов, чтобы добраться до второй рабочей позиции 252 для установки на роботе-уборщике 100. В данном варианте осуществления базовая станция включает в себя модуль сбора блоков для мытья полов 231, в частности, ссылаясь на рис. 23–24, модуль сбора блоков для мытья полов 231 включает в себя опрокидывающую конструкцию 235, нижний конец опорной части базовой станции служит вращающимся валом, опрокидывающая конструкция может поворачиваться в вертикальном направлении вдоль этого опорного вала, собирая блок для мытья полов в модуль сбора блоков для мытья полов. Модуль сбора блоков для мытья полов 231 включает в себя шатун и вмещающую часть, шатун соединен с вмещающей частью, модуль сбора блоков для мытья полов через шатун соединен с опорной частью базовой станции, а вмещающая часть модуля сбора блоков для мытья полов используется для размещения блока для мытья полов 310. Когда модуль сбора блоков для мытья полов находится в исходном положении, модуль сбора блоков для мытья полов параллелен горизонтальной плоскости, робот-уборщик достигает первой рабочей позиции базовой станции, отсоединяя блок для мытья полов от основного корпуса робота-уборщика и перемещая его во вмещающую часть модуля сбора блоков для мытья полов, и модуль сбора блоков для мытья полов вращается против часовой стрелки в вертикальном направлении вокруг опорного вала через шатун, а блок для мытья полов, помещенный во вмещающую часть, следуя за шатуном, вращается против часовой стрелки в вертикальной плоскости и помещается в первый модуль хранения. На рис. 24 показано, как шатун модуля сбора блоков для мытья полов приводит вмещающую часть во вращение против часовой стрелки в вертикальной плоскости. Когда блок для мытья полов помещается в первый модуль хранения, модуль сбора блоков для мытья полов вращается по часовой стрелке в вертикальном направлении, чтобы модуль сбора блоков для мытья полов вернулся в исходное положение. В другом варианте осуществления настоящего изобретения, как показано на рис. 1, настоящее изобретение предлагает систему 300 робота-уборщика, включающую в себя робот-уборщик 100 для очистки внутренних рабочих поверхностей и базовую станцию 200 робота-уборщика 100. Базовая станция 200 – остановка для робота-уборщика, которая может использоваться для выполнения заданных операций для робота-уборщика 100, таких как зарядка робота-уборщика 100, замена или очистка блока для мытья полов, замена или добавление аксессуаров или выполнение других заданных операций для робота-уборщика 100. Как показано на рис. 2 и рис. 3 робот-уборщик 100 включает в себя основной корпус, подвижный блок, предназначенный для приведения основного корпуса в движение по рабочей поверхности, механизм очистки, предназначенный для очистки рабочей поверхности, силовой механизм, предназначенный для обеспечения питанием робота-уборщика 100, энергетический блок, предназначенный для обеспечения энергией, и блок управления, предназначенный для управления автономной работой робота-уборщика 100 на рабочей поверхности. Подвижный блок включает в себя ходовые колеса 110, и в других вариантах осуществления подвижный блок также может включать в себя гусеничную конструкцию или другие обычные конструкции для передвижения. В данном варианте осуществления робот-уборщик 100 представляет собой робот для мытья полов, а механизм очистки представляет собой блок для мытья полов 310, который выполняет операции по мытью полов на рабочей поверхности. В других вариантах осуществления робот-уборщик 100 также может быть подметающим роботом, моющим роботом и т.д., соответственно, его механизм очистки может включать в себя роликовую щетку, боковую щетку и т.д. Силовой механизм включает в себя двигатель и соединенный с ним механизм передачи, который соединен с подвижным блоком. Двигатель приводит в действие механизм передачи, под действием механизма передачи подвижный блок передвигается, при этом механизм передачи может быть червячным, коническим зубчатый механизмом и др. Базовая станция 200 – это зарядная станция, предназначенная для зарядки робота-уборщика 100, или остановка, предназначенная для выполнения заданных операций для робота-уборщика. В данном варианте осуществления базовая станция 200 может не только заряжать робот-уборщик 100, но также выполнять другие предварительно заданные операции. За счет интеграции функций зарядки и выполнения других операций на одной и той же базовой станции 200 снижается стоимость и уменьшается количество остановок, что удобно для пользователей, чтобы управлять роботом-уборщиком 100 или наблюдать за ним. В данном варианте осуществления базовая станция 200 является станцией замены блока для мытья полов, предназначенной для замены блока для мытья полов робота-уборщика 100; в других вариантах осуществления базовая станция 200 также может быть станцией добавления или вычитания дополнительных блоков, предназначенной для добавления или вычитания дополнительных блоков (таких как блоки очистки воздуха и т.д.) из робота-уборщика 100; а в других вариантах осуществления базовая станция 200 также может быть станцией очистки, предназначенной для очистки блока для мытья полов. В то же время базовая станция 200 также имеет функцию зарядки, когда заряда робота-уборщика 100 не хватало, робот-уборщик 100 может автоматически вернуться на базовую станцию 200 для зарядки, чтобы пополнить электроэнергию. Базовая станция 200 включает в себя основание 253, функциональный блок, расположенный над основанием 253 и используемый для выполнения предварительно установленных функций, принимающую полость 258, окруженную функциональным блоком и основанием 253 и предназначенную для размещения робота-уборщика, а также блок зарядки, предназначенный для зарядки робота-уборщика. Причем функциональный блок расположен над принимающей полостью 258. Блок зарядки включает в себя клеммы зарядки для стыковки с роботом-уборщиком 100. Базовая станция 200 включает в себя нижнюю пластина 2531 и опорную часть, соединяющую нижнюю пластину с функциональным блоком. Предустановленная функция, выполняемая функциональным блоком, соответствует предварительно установленным операциям, предопределенным базовой станцией 200. В данном варианте осуществления базовая станция 200 представляет собой станцию замены блока для мытья полов, предназначенную для автоматической замены блока для мытья полов, и, соответственно, функциональный блок представляет собой структуру или вещество, необходимое в процессе замены блока для мытья полов. В данном варианте осуществления функциональный блок используется по крайней мере для выполнения функции хранения, а функциональный блок включает в себя блок хранения 215, предназначенный для приема хранимых веществ. Хранимые вещества – это вещество, необходимое базовой станции 200 во время выполнения заданных операций. Например, в данном варианте осуществления базовая станция 200 представляет собой станцию замены блока для мытья полов, предназначенную для автоматической замены блока для мытья полов, при выполнении замены блока для мытья полов потребуется новый (чистый) блок для мытья полов, однако образуется и грязный блок для мытья полов, следовательно, в это время необходим блок хранения для размещения этих блоков для мытья полов, таким образом, функциональный блок представляет собой блок хранения 210, предназначенный для вмещения блоков для мытья полов. В других вариантах осуществления функциональный блок также может быть блоком хранения, предназначенным для хранения других веществ, например, для хранения блока очистки воздуха, воды или других чистящих средств. В других вариантах осуществления функциональный блок также может использоваться для выполнения других функций, таких как защита от пыли, очистка, зарядка и т.д. Как показано на рис. 53–54, блок хранения 215 расположен над принимающей полостью 258, а функциональный блок включает в себя сообщающееся отверстие 2150, которое может открываться и закрываться. Когда сообщающееся отверстие 2150 открыто, блок хранения 215 сообщается с принимающей полостью 258 сверху и снизу, а когда сообщающееся отверстие 2150 закрыто, блок хранения 215 не сообщается с принимающей полостью 258 сверху и снизу. Хранимые вещества могут напрямую перемещаться сверху и снизу между блоком хранения 215 и принимающей полостью 258 через сообщающееся отверстие, чтобы автоматически устанавливать вещества, хранящиеся на базовой станции 200, на роботе-уборщике, или автоматически хранить разобранные с робота-уборщика 100 вещества в блоке хранения 215 на базовой станции 200. На нижней пластине 2531 имеется канавка для размещения хранимых веществ, так что когда хранимые вещества перемещаются из блока хранения 215 в принимающую полость 258, они могут храниться в канавке для размещения, предотвращая или уменьшая выступ хранимых вещества за поверхностью нижней пластины 2531. В данном варианте осуществления робот-уборщик 100 имеет функцию возврата на базовую станцию 200 и автоматической замены блока для мытья полов 310, при этом блок хранения 215 используется для хранения блока для мытья полов 310, а блок хранения 215 включает в себя первый модуль хранения 2153, предназначенный для хранения грязного блока для мытья полов, и второй модуль хранения 2154, предназначенный для хранения чистого блок для мытья полов, сообщающееся отверстие 2150 включает в себя первое сообщающееся отверстие 2151 и второе сообщающееся отверстие 2152, расположенные под первым модулем хранения 2153 и вторым модулем хранения 2154 соответственно и способные открываться и закрываться. Первый модуль хранения 2153 и второй модуль хранения 2154 расположены над принимающей полостью 258 рядом друг с другом в горизонтальном направлении. На соответствующей нижней пластине 2531 имеются канавка для размещения грязного блока для мытья полов и канавка для размещения чистого блока для мытья полов, с одной стороны, ограничивая блок для мытья полов, а с другой стороны, предотвращая значительный выступ блока для мытья полов за пределы нижней пластины 2531 и создание помехи роботу-уборщику 100 двигаться. Как правило, робот-уборщик 100 имеет панель управления. Пользователи могут управлять роботом-уборщиком 100 с помощью панели управления робота-уборщика 100, которая обычно устанавливается на верхней поверхности робота-уборщика 100. Поскольку базовая станция 200 объединяет в себе функции, отличные от зарядки, установить этот функциональный блок над базовой станцией и над принимающей полостью 258 для экономии занятой площади. Однако, если функциональный блок был установлен над принимающей полостью 258, когда робот-уборщик 100 возвращается на базовую станцию 200, робот-уборщик 100 помещается в принимающую полость 258, а верхняя поверхность робота-уборщика 100 блокируется функциональным блоком, поэтому пользователь не может напрямую управлять панелью управления на роботе-уборщике 100. В этом случае если пользователь хочет управлять панелью управления на роботе-уборщике 100 с целью выполнения соответствующих инструкций, или хочет напрямую выполнить некоторые другие операции на роботе-уборщике 100, он будет вынужден вытащить робот-уборщик 100 вручную, что может не только пачкать руки пользователя, но и снизить удовлетворенность пользователя, более того, принудительные действия также могут вызвать структурное повреждение или нарушение программы робота-уборщика 100. В данном варианте осуществления базовая станция 200 также включает в себя передатчик сигнала 259, предназначенный по крайней мере для отправки роботу-уборщику 100 сигнала инструкции выхода из принимающей полости 258, и операционную часть 340, электрически соединенную с передатчиком сигнала 259, чтобы, по крайней мере, управлять передатчиком сигнала для отправки сигнала инструкции выхода. Когда робот-уборщик 100 входит в принимающую полость 258 базовой станции 200, с помощью операционной части 340 можно напрямую вывести робот-уборщик из базовой станции, а затем выполнять соответствующие операции. В одном варианте осуществления на корпусе робота-уборщика 100 установлен съемный батарейный блок. Когда пользователю необходимо демонтировать батарейный блок, если робот-уборщик 100 находится на базовой станции 200 в это время, то с помощью операционной части 340 на базовой станции, можно вывести робот-уборщик 100 из базовой станции, чтобы он прекратил работу и пользователь снял батарейный блок. В одном варианте осуществления робот-уборщик 100 оборудован баком для воды, который может подавать воду в блок для мытья полов 310, чтобы осуществить влажную уборку, когда в баке осталось мало воды, пользователь должен добавить воду в бак, в это время, если робот-уборщик 100 находится на базовой станции, пользователь может с помощью операционной части 340 на базовой станции вывести робот-уборщик из базовой станции 200 и припарковать за пределами базовой станции, чтобы пользователь мог снять и установить бак для воды. Конечно, передатчик сигнала 259 и операционная часть 340 могут также интегрировать другие функции, так что пользователь может управлять роботом-уборщиком 100 для выполнения других инструкций, используя операционную часть 340 на базовой станции 200. Например, передатчик сигнала 259 может не только отправить сигнал инструкций о выходе, он может также отправить сигнал инструкций о входе в принимающую полость 258, соответственно, операционная часть 340 электрически связана с передатчиком сигнала 259 и может управлять передатчиком сигнала 259 для отправки сигнала инструкции на вход, таким образом с помощью операционной части 340 можно управлять роботом-уборщиком 100 для выполнения инструкции о входе в принимающую полость 258. Разумеется, передатчик сигнала 259 также может использоваться для отправки управляющего сигнала, чтобы робот-уборщик 100 возвращался, или отправки других сигналов, соответственно, операционная часть 340 электрически соединена с передатчиком сигнала 259 и может управлять передатчиком сигнала 259 для отправки соответствующих управляющих сигналов или других сигналов, чтобы управлять роботом-уборщиком 100 для выполнения других инструкций. Операционная часть 340 предназначена для использования пользователя, чтобы управлять передатчиком сигнала 259 для передачи соответствующих сигналов, тем самым управляя роботом-уборщиком 100 для выполнения соответствующих инструкций. Например, пользователь может с помощью операционной части 340 управлять передатчиком сигнала 259 для выдачи команды на уход, тем самым управляя роботом-уборщиком 100 для выполнения команды выхода из принимающей полости, так что когда робот-уборщик 100 находится в принимающей полости 258, пользователь может с помощью операционной части 340 напрямую управлять роботом-уборщиком 100, чтобы робот-уборщик покинул принимающую полость, что позволяет избежать принудительного управления роботом-уборщиком 100 вручную, эффективно улучшить пользовательский опыт. Точно так же, если передатчик сигнала 259 также имеет функцию отправлять команду на вход, то когда робот-уборщик 100 находится вне базовой станции 200, пользователь может быстро отозвать робот-уборщик 100, задействовав операционную часть 340 (например, отзыв одним щелчком), чтобы не искать везде робот-уборщик 100. Операционная часть 340 может быть физическим операционным элементом или виртуальным операционным элементом на экране, а операционным элементом может быть кнопка или педаль и т.д. Когда передатчик сигнала 259 может посылать разные сигналы, операционная часть 340 может иметь только один операционный элемент, как показано на рис. 1, можно управлять передатчиком сигнала 259, чтобы посылать разные сигналы с помощью различных методов, таких как длительность операции или число операций; Также возможно установить несколько операционных элементов, каждый из которых соответствует разному сигналу. Например, операционная часть 340 включает в себя операционный элемент въезда, установленный самостоятельно и предназначенный для управления передатчиком сигнала 259, чтобы отправить команду на въезд, и операционный элемент выезда, предназначенный для управления передатчиком сигнала 259, чтобы отправить команду на выезд. Или, как показано на рис. 36, базовая станция 200 имеет два вида операционных элементов выезда, в частности, операционная часть 340 базовой станции 200 имеет первый операционный элемент 320 и второй операционный элемент 330, когда нужно вывести робот-уборщик 100 из базовой станции, при нажатии на первый операционный элемент 320 на базовой станции 200 робот-уборщик 100 выезжает из базовой станции и продолжает уборку в рабочей зоне; при нажатии на второй операционный элемент 330 на базовой станции 200 робот-уборщик 100 выезжает из базовой станции 200 и останавливается за пределами базовой станции, чтобы пользователь снял/установил батарейный блок, снял/установил бак для воды и т.д. Операционная часть 340 расположена на внешней поверхности базовой станции 200 для удобства пользователя. Как показано на рис. 1, операционной частью 340 может служить клавиша, установленная на верхней поверхности базовой станции 200 для удобства пользователя. Конечно, операционной частью 340 также может служить педаль, установленная сбоку от базовой станции 200 для удобства пользователя. В других вариантах осуществления операционная часть 340 также может быть расположена на других внешних поверхностях базовой станции 200, таких как передняя и задняя поверхности, при условии, что это удобно для пользователя. Робот-уборщик 100 включает в себя приемник сигнала, предназначенный для приема сигнала, передаваемого передатчиком сигнала 259. Передатчик сигнала 259 может быть передатчиком инфракрасного сигнала, передатчиком сигнала Bluetooth или передатчиком сигнала Wi-Fi. В данном варианте осуществления в качестве передатчика сигнала 259 взят передатчик инфракрасного сигнала. Передатчик сигнала 259 расположен в принимающей полости 258, которая имеет отверстие 255, сообщающееся с внешним пространством для выезда и/или въезда робота-уборщика 100, а опорная часть 2532 расположена на стороне базовой станции 200, противоположной к отверстию 255, таким образом, когда робот-уборщик 100 останавливается, проекции робота-уборщика 100 и функционального блока в горизонтальной плоскости примерно совпадают друг с другом, так что базовая станция 200 станет более компактной в горизонтальном направлении, уменьшается общая площадь, занятая системой робота-уборщика 300. Передатчик сигнала 259 установлен на опорной части 2532 и передает сигнал в сторону отверстия 255. Когда робот-уборщик 100 состыкован с базовой станцией 200, робот-уборщик 100 расположен на стороне опорной части 2532, обращенной к отверстию 255, поэтому передатчик сигнала 259 отправляет сигнал в сторону отверстия 255, как раз в сторону робота-уборщика 100, что удобно для приема сигнала на роботе-уборщике 100. Когда робот-уборщик 100 не состыкован с базовой станцией 200, передатчик сигнала 259 отправляет сигнал за пределы базовой станции 200 через отверстие 255, чтобы сигнал не закрыли другие компоненты на базовой станции 200, что удобно для приема сигнала на роботе-уборщике 100. Приемник сигнала расположен впереди направления движения робота-уборщика 100, чтобы было легче принимать сигнал, передаваемый передатчиком сигнала 259. Передатчик сигнала 259 также может использоваться для передачи управляющего сигнала, направляющего робот-уборщик 100 перемещаться к базовой станции 200. После того, как робот-уборщик 100 обнаруживает, что уровень заряда меньше порогового значения, он направляется к базовой станции 200 в соответствии с заданным маршрутом, постоянно проверяя сигнал от блока зарядки во время движения, определяет положение базовой станции 200 в соответствии с сигналом и завершает стыковку и зарядку. В данном варианте осуществления клемма зарядки расположена в опорной части 2532 или на нижней пластине 2531, разумеется, в некоторых вариантах осуществления клемма зарядки также может быть расположена внизу блока хранения 210, чтобы верхняя часть робота-уборщика 100 контактировала с клеммой зарядки для совершения зарядки. После того, как робот-уборщик 100 входит на базовую станцию 200 и завершает стыковку, начинается зарядка, после зарядки робот-уборщик 100 покидает базовую станцию 200. В других вариантах осуществления в состав способов зарядки робота-уборщика 100 также входит беспроводная зарядка, блок зарядки включает в себя передающую катушку, робот-уборщик 100 включает в себя приемную катушку, а робот-уборщик 100 заряжается за счет электромагнитной индукции передающей катушки и приемной катушки. Установка блока зарядки на базовой станции 200 дает следующие положительные эффекты: благодаря интеграции функций базовой станции 200, функции базовая станция 200 используются повторно, а конструкция компактная. В еще одном варианте осуществления настоящего изобретения, как показано на рис. 1 предложена система робота-уборщика 300, которая включает в себя робот-уборщик 100 для очистки внутренних рабочих поверхностей и базовую станцию 200 робота-уборщика 100. Базовая станция 200 – остановка для робота-уборщика, которая может использоваться для выполнения заданных операций для робота-уборщика 100, таких как зарядка робота-уборщика 100, замена или очистка блока для мытья полов, замена или добавление аксессуаров или выполнение других заданных операций для робота-уборщика 100. Как показано на рис. 2 и рис. 3 робот-уборщик 100 включает в себя основной корпус, подвижный блок, предназначенный для приведения основного корпуса в движение по рабочей поверхности, механизм очистки, предназначенный для очистки рабочей поверхности, силовой механизм, предназначенный для обеспечения питанием робота-уборщика 100, энергетический блок, предназначенный для обеспечения энергией, и блок управления, предназначенный для управления автономной работой робота-уборщика 100 на рабочей поверхности. Подвижный блок включает в себя ходовые колеса 110, и в других вариантах осуществления подвижный блок также может включать в себя гусеничную конструкцию или другие обычные конструкции для передвижения. В данном варианте осуществления робот-уборщик 100 представляет собой робот для мытья полов, а механизм очистки представляет собой блок для мытья полов 310, который выполняет операции по мытью полов на рабочей поверхности. В других вариантах осуществления робот-уборщик 100 также может быть подметающим роботом, моющим роботом и т.д., соответственно, его механизм очистки может включать в себя роликовую щетку, боковую щетку и т.д. Силовой механизм включает в себя двигатель и соединенный с ним механизм передачи, который соединен с подвижным блоком. Двигатель приводит в действие механизм передачи, под действием механизма передачи подвижный блок передвигается, при этом механизм передачи может быть червячным, коническим зубчатый механизмом и др. В данном варианте осуществления базовая станция 200 представляет собой станцию замены блока для мытья полов, предназначенную для автоматической замены блока для мытья полов робота-уборщика 100, а также является зарядной станцией, предназначенной для зарядки робота-уборщика 100. Когда заряда робота-уборщика 100 не хватало, робот-уборщик 100 может автоматически вернуться на базовую станцию 200 для зарядки, чтобы пополнить электроэнергию. За счет интеграции функций зарядки и замены блока для мытья полов на одной и той же базовой станции 200 снижается стоимость и уменьшается количество остановок, что удобно для пользователей, чтобы управлять роботом-уборщиком 100 или наблюдать за ним. Конечно, в других вариантах осуществления базовая станция 200 может служить только пунктом для замены блока для мытья полов. Базовая станция 200 включает в себя основание 253, блок зарядки, расположенный на основании 253 и предназначенный для зарядки робота-уборщика 100, блок хранения 210, имеющий блок хранения и предназначенный для хранения блока для мытья полов робота-уборщика 100, блок передачи, предназначенный для приведения в движение блока для мытья полов 310, и блок управления, предназначенный для управления блоком передачи, чтобы осуществить автономный привод в движения блока для мытья полов и осуществить автоматическую замену блока для мытья полов 310. В данном варианте осуществления блок хранения 210 расположен над основанием 253, а блок хранения 210 и основание 253 образуют принимающую полость 258 для размещения робота-уборщика, при этом блок хранения 210 расположен над принимающей полостью 258; в других вариантах осуществления блок хранения 210 также может быть размещен в других местах основания 253, например, сзади или сбоку базовой станции 200. Блок зарядки включает в себя клемму зарядки, предназначенную для стыковки с роботом-уборщиком 100 для зарядки. Базовая станция 200 включает в себя нижнюю пластину 2531, и опорную часть, соединяющую нижнюю пластину и блок хранения 210. Блок хранения 210 включает в себя блок хранения 215, предназначенный для размещения блока для мытья полов 310. В данном варианте осуществления базовая станция 200 представляет собой станцию замены блока для мытья полов, предназначенную для автоматической замены блока для мытья полов. При выполнении замены блока для мытья полов необходим новый (чистый) блок для мытья полов, а также будет образовываться грязный блок для мытья полов, следовательно, в это время необходим блок хранения для размещения этих блоков для мытья полов. Следовательно, можно установить блок хранения для размещения этих блоков для мытья полов, реализуя автоматическую замену блока для мытья полов. В данном варианте осуществления робот-уборщик 100 может автоматически возвращаться на базовую станцию 200, автоматически заменять блок для мытья полов, автоматически помещать грязный блок для мытья полов в блок хранения 210 и автоматически помещать чистый блок для мытья полов 310 в блок хранения. Весь процесс происходит автоматически, без участия человека. Однако, когда блок хранения 210 заполнен грязными блоками для мытья полов 310 или в нем кончился чистый блок для мытья полов 310, пользователю сложно своевременно выяснить это. Если ситуация не будет обнаружена своевременно, роботизированная система чистки 300 не сможет автоматически заменить грязный блок для мытья полов или продолжать автоматические операции уборки из-за полного заполнения блоками для мытья полов или отсутствия блоков для мытья полов. В данном варианте осуществления базовая станция 200 также включает в себя блок контроля состояния хранения, предназначенный для определения, находится ли состояние хранения в блоке хранения 215 в предварительно заданном состоянии, блок напоминания, предназначенный для отправки информации напоминания, указывающей на то, что состояние хранения в блоке хранения 215 находится в предварительно заданном состоянии, блок управления управляет блоком напоминания для отправки информации напоминания в соответствии с результатом контроля, проведенного блока контроля состояния хранения. Под состоянием хранения в блоке хранения 215 понимается наличие ли блока для мытья полов в блоке хранения 215 и/или превышение ли количества хранящихся блоков для мытья полов над заданным значением и другие состояния. Под предустановлено заданным состоянием понимается заводское или определяемое пользователем пороговое состояние, например, состояние с наличием блока для мытья полов в блоке хранения 215 может быть определено как пороговое состояние, когда блок контроля состояния хранения обнаруживает, что в блоке хранение существует блок для мытья полов, под контролем блока управления блок напоминания отправляет информацию напоминания; также можно определить состояние с отсутствием блока для мытья полов в блоке хранения 215 в качестве порогового состояния, когда блок контроля состояния хранения обнаруживает, что в блоке хранение отсутствует блок для мытья полов, под контролем блока управления блок напоминания отправляет информацию напоминания; также можно определять состояние, при котором количество блоков для мытья полов в блоке хранения 215 достигает заданного значения, в качестве порогового состояния, когда блок контроля состояния хранения обнаруживает, что количество блоков для мытья полов в блоке хранения достигает заданного значения, под контролем блока управления блок напоминания отправляет информацию напоминания и так далее. Блок напоминания может быть устройством световой сигнализации, устройством звуковой сигнализации и блоком беспроводной передачи, предназначенным для отправки информацию напоминания и т.д. Например, блок напоминания может отправлять соответствующие световые или мигающие световые сигналы через устройство световой сигнализации, или издавать звуковые сигналы через устройство звуковой сигнализации, или отправлять информацию напоминания в приложение мобильного телефона, компьютер или другие мобильные устройства пользователя через блок беспроводной передачи. Как показано на рис. 53–54, блок хранения 215 расположен над принимающей полостью 258, а блок хранения 215 включает в себя сообщающееся отверстие 2150, которое может открываться и закрываться. Когда сообщающееся отверстие 2150 открыто, блок хранения 215 сообщается с принимающей полостью 258 сверху и снизу, а когда сообщающееся отверстие 2150 закрыто, блок хранения 215 не сообщается с принимающей полостью 258 сверху и снизу. Блок для мытья полов 310 может напрямую перемещаться сверху и снизу между блоком хранения 215 и принимающей полостью 258 через сообщающееся отверстие, чтобы автоматически устанавливать чистый блок для мытья полов 310 из базовой станции 200 на роботе-уборщике, или автоматически хранить грязный блок для мытья полов 310, снятый с робота-уборщика 100, в блоке хранения 215 на базовой станции 200. Нижняя пластина 2531 включает в себя канавку для размещения блока для мытья полов 310, так что, когда блок для мытья полов 310 перемещается из блока хранения 215 в принимающую полость 258, блок для мытья полов 310 может храниться в канавке для размещения, предотвращая или уменьшая выступ блока для мытья полов 310 за поверхностью нижней пластины 2531. Блок хранения 210 включает в себя первый модуль хранения 211 для хранения грязного блока для мытья полов 310 и второй модуль хранения 212 для хранения чистого блока для мытья полов 310, соответственно, блок хранения 215 включает в себя первый модуль хранения 2153 для хранения грязного блока для мытья полов и второй модуль хранения 2154 для хранения чистого блока для мытья полов. Сообщающееся отверстие 2150 включает в себя первое сообщающееся отверстие 2151 и второе сообщающееся отверстие 2152, которые расположены под первым модулем хранения 2153 и вторым модулем хранения 2154 соответственно и могут открываться и закрываться. Первый модуль хранения 2153 и второй модуль хранения 2154 расположены над принимающей полостью 258 рядом друг с другом в горизонтальном направлении. На соответствующей нижней пластине 2531 имеются канавка для размещения грязного блока для мытья полов и канавка для размещения чистого блока для мытья полов, с одной стороны, ограничивая блок для мытья полов, а с другой стороны, предотвращая значительный выступ блока для мытья полов за пределы нижней пластины 2531 и создание мешал роботу-уборщику 100 двигаться. Принимающая полость 258 имеет отверстие 255, сообщающееся с внешним пространством для выезда и/или въезда робота-уборщика 100, а опорная часть 2532 расположена на стороне базовой станции 200, противоположной к отверстию 255, таким образом, когда робот-уборщик 100 паркован, проекции робота-уборщика 100 и блока хранения 210 в горизонтальной плоскости примерно совпадают друг с другом, так что базовая станция 200 станет более компактной в горизонтальном направлении, уменьшается общая площадь, занятая системой робота-уборщика 300. Клемма зарядки расположена в опорной части 2532 или на нижней пластине 2531, разумеется, в некоторых вариантах осуществления клемма зарядки также может быть расположена внизу блока хранения 210, чтобы верхняя часть робота-уборщика 100 контактировала с клеммой зарядки для совершения зарядки. После того, как робот-уборщик 100 входит на базовую станцию 200 и завершает стыковку, начинается зарядка, после зарядки робот-уборщик 100 покидает базовую станцию 200. В других вариантах осуществления в состав способов зарядки робота-уборщика 100 также входит беспроводная зарядка, блок зарядки включает в себя передающую катушку, робот-уборщик 100 включает в себя приемную катушку, а робот-уборщик 100 заряжается за счет электромагнитной индукции передающей катушки и приемной катушки. Установка блока зарядки на базовой станции 200 дает следующие положительные эффекты: благодаря интеграции функций базовой станции 200, функции базовая станция 200 используются повторно, а конструкция компактная. Блок контроля состояния хранения 360 может быть механической структурой обнаружения, датчиком обнаружения и т.д. Как показано на рис. 55 и рис. 56, взяв в качестве примера механическую структуру обнаружения, блок контроля состояния хранения 360 включает в себя элемент обнаружения 63, и подвижный элемент 61, по крайней мере частично подвижно размещенный в блоке хранения 215 для срабатывания элемента обнаружения 63. Подвижный элемент 61 включает в себя спусковую часть 612, предназначенную для срабатывания элемента обнаружения 63, контактную часть 611, предназначенную для контакта с блоком для мытья полов, и упругий элемент 613, предназначенный для обеспечения возвращающей силы подвижному элементу. Когда блок для мытья полов 310 в блоке хранения 215 оказывает давление на контактную часть 611, контактная часть 611 приводит в движение спусковую часть 612, чтобы вызвать переключение состояния элемента обнаружения 63, или, когда блок для мытья полов 310 в блоке хранения 215 кончается, он приводит в перемещение спусковую часть 612 под действием возвращающей силы упругого элемента, чтобы запускать элемент обнаружения 63. В соответствии с конкретной ситуацией, блок управления может управлять блоком напоминания для отправки информации напоминания, когда элемент обнаружения 63 переключается из состояния без запуска в состояние запуска, а также может управлять отправкой информации с напоминанием, когда элемент обнаружения 63 переключается из состояния запуска в состояние без запуска. Подвижный элемент 61 расположен на внутренней стенке блока хранения 215, так что, когда блок для мытья полов 310 размещается в блок хранения 215, может прилагать давление к контактной части 611, срабатывая подвижный элемент 61, тем самым возбуждая элемент обнаружения 63. Вышеописанный элемент обнаружения 63 может быть фотоэлектрическим переключателем или микропереключателем и др. В данном варианте осуществления состояние хранения в блоке хранения контролируется механической структурой обнаружения, чтобы избежать помех от пыли, внешней среды или других структур. Структура обнаружения точна, а стоимость невысока. Когда блок хранения 210 включает в себя первый модуль хранения 211, предназначенный для хранения грязного блока хранения полов 310, и второй модуль хранения 212, предназначенный для хранения чистого блока хранения 310, первый модуль хранения 211 и второй модуль хранения 212 соответственно включают в себя блока контроля состояния хранения 360. Как показано на рис. 55 и рис. 56, в первом модуле хранения 2153 и втором модуле хранения 2154 соответственно предусмотрены подвижные элементы 61, а базовая станция снабжена двумя элементами обнаружения 63, соответствующими подвижным элементам 61. В частности, второй модуль хранения 212 базовой станции 200 включает в себя блок контроля состояния хранения 360, который может обнаруживать текущее состояние блока для мытья полов 310 во втором модуле хранения 212 и отправлять пользователю информацию напоминания. Например, когда обнаруживается, что во втором модуле хранения нет блока для мытья полов 310, можно напоминать пользователю, что нужно вовремя добавить блок для мытья полов, чтобы не повлиять на стабильность работы базовой станции 200. Точно так же, первый модуль хранения 211 также включает в себя блок контроля состояния хранения 360, который определяет, что блок для мытья полов 310, помещенный в первый модуль хранения 211, достиг заданного значения, или обнаруживает, что время хранения блока для мытья полов в первом модуле хранения 211 достигло заданного значения, и отправляет пользователю информацию напоминания о необходимости обработки блока для мытья полов 310, например, когда количество блоков для мытья полов 310 больше или равно заданному значению, отправляет пользователю информацию напоминания о необходимости разобраться с блоком для мытья полов 310 отправлено пользователю. Вышеуказанные предварительно заданные значения могут быть установлены на заводе или могут быть установлены в соответствии с требованиями пользователя. Базовая станция может отправлять информацию напоминания по следующим способам: базовая станция взаимодействует с мобильными устройствами (такими как мобильные телефоны, компьютеры, IPAD и т.д.), чтобы отправлять пользователю информацию напоминания, напоминая ему о необходимости своевременно очистить базовую станцию или о необходимости добавить блок для мытья полов. В других вариантах осуществления базовая станция включает в себя индикатор, который может напоминать пользователю о выполнении соответствующих операций с базовой станцией путем излучения светового и звукового сигнала. В другом варианте осуществления, как показано на рис. 39, блок контроля состояния хранения 360 может быть фотоэлектрическим датчиком, который включает в себя передающий конец и приемный конец, и соединительная линия между передающим концом и приемным концом проходит через блок хранения 215, чтобы контролировать состояние хранения в блоке хранения 215. Фотоэлектрические датчики могут использоваться для определения количества блоков для мытья полов 310 в блоке хранения 210 (включая ноль), для определения того, что первый модуль хранения 2153 заполнен блоками для мытья полов 310, и для определения отсутствия блока для мытья полов 310 в первом модуле хранения 2154. Блок для мытья полов 310, отсоединенный от робота-уборщика 100, помещается в первый модуль хранения 2153, причем блок для мытья полов 310, предназначенный для установки на роботе-уборщике 100, помещается в первый модуль хранения 2154, когда первый модуль хранения 2153 заполнен блоками для мытья полов 310, или в первом модуле хранения 2154 отсутствует блок для мытья полов 310 для установки на роботе-уборщике 100, базовая станция отправляет соответствующие команды напоминания. Передающий конец может быть установлен на одной стороне блока хранения, а принимающий конец может быть установлен в соответствующем месте на другой стороне блока хранения, когда сигнал, передаваемый передающим концом, может быть принят принимающим концом, это означает, что между передающим концом и принимающим концом нет барьера. Если необходимо определить, заполнен ли первый модуль хранения 2153 блоками для мытья полов 310, то установить передатчик фотоэлектрического датчика на одной стороне верхней части первого модуля хранения 2153 и приемник фотоэлектрического датчика на другой стороне. Если первый модуль хранения 2153 заполнен блоками для мытья полов 310, то когда передатчик передает сигнал, который не может быть принят приемником, потому что сигнал блокируется блоком для мытья полов 310, расположенным на вершине первого модуля хранения 2153, отсюда определено, что первый модуль хранения 2153 заполнен блоками для мытья полов 310. И, если необходимо определить, есть ли блок для мытья полов 310 в первом модуле хранения 2154, предназначенный для установки на роботе-уборщике 100, то установить передающий конец фотоэлектрического датчика на одной стороне дна первого модуля хранения 2154, и установить приемный конец в соответствующем месте с другой стороны. При отсутствии блока для мытья полов 310 в первом модуле хранения 2154 для установки, то когда передающий конец фотоэлектрического датчика излучает сигнал, приемный конец может принять его, так как в центре нет блока для мытья полов, отсюда считается, что в первом модуле хранения 2154 нет блока для мытья полов 310, предназначенного для установки на роботе-уборщике 100. В других вариантах осуществления фотоэлектрический датчик может быть установлен в других местах, например, если необходимо определить, что количество блоков для мытья полов 310 в блоке хранения 215 меньше 2, то можно установить фотоэлектрический датчик в том месте, где должен быть уложен второй блок для мытья полов. Если приемный конец не может обнаружить сигнал, это означает, что количество блоков для мытья полов 310 в блоке хранения больше или равно 2, в противном случае, количество блоков для мытья полов 310 в блоке хранения менее 2. Конечно, в других вариантах осуществления блоком контроля состояния хранения также может быть датчик Холла, инфракрасный датчик, геркон и так далее. Технические характеристики приведенных выше вариантов осуществления можно комбинировать произвольно. Чтобы сделать описание кратким, все возможные комбинации технических характеристик в вышеупомянутых вариантах осуществления не описаны. Тем не менее, при отсутствии противоречий в комбинациях этих технических характеристик, их следует рассматривать как объем данного описания. Вышеупомянутые примеры осуществления выражают только несколько вариантов осуществления настоящего изобретения, описание которых относительно конкретное и подробное, но его нельзя понимать как ограничение сферы действия патента на настоящее изобретение. Следует отметить, что для специалистов в данной области они могут сделать различенные модификации и изменения, не отходя от общей концепции настоящего изобретения, но все модификации и изменения относятся к сфере защиты настоящего изобретения. Следовательно, сфера защиты настоящего изобретения должна определяться прилагаемой формулой изобретения.
Реферат
Роботизированная система чистки, включающая в себя: робота-уборщика, блок для мытья полов, соединенный с роботом-уборщиком, и базовую станцию, предназначенную для парковки робота-уборщика; в состав робота-уборщика входят: основной корпус; подвижный блок; компонент подключения, используемый для съемной установки блока для мытья полов на корпусе робота, а базовая станция включает в себя: блок хранения, предназначенный для хранения по крайней мере одного блока для мытья полов; рабочие позиции, предназначенные для парковки робота-уборщика, чтобы заменить блок для мытья полов; блок передачи, предназначенный для передачи блока для мытья полов между блоком хранения и рабочей позицией; роботизированная система чистки также включает в себя блок управления. Настоящее изобретение имеет положительные эффекты, заключающиеся в том, что робот-уборщик умнее, а соответствующая базовая станция компактна по конструкции и занимает небольшую площадь. 3 н. и 17 з.п. ф-лы, 56 ил.

Формула
Документы, цитированные в отчёте о поиске
Система автоматической уборки, робот-уборщик и способ управления роботом-уборщиком
Система робота, способная определить область перемещения
Комментарии