Устройство контроля системы движений - RU2642394C1
Код документа: RU2642394C1
Чертежи
Описание
Изобретение относится к вычислительной технике, в частности устройствам ввода, и может быть использовано в компьютерных играх для управления объектами в моделируемых на ЭВМ пространствах, в области машиностроения, самолетостроения, космонавтики, подводного и надводного транспорта.
Известен манипулятор для компьютера в описании к патенту на полезную модель №45843, от 15.02.2005, МПК G06F 3/033, опубл. 2005.05.27 в Бюл. №15, содержащий кнопки, корпус, внутри которого установлен шарнир, а на шарнире жестко закреплен хвостовик для крепления его на любом удобном месте для оператора, причем корпус жестко соединен с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями для расположения предплечий оператора с возможностью движения за счет шарнира, при этом на передних частях управляющего элемента по периферии друг против друга с боковых сторон расположены кнопки и ролики для удобного управления системой движений.
Недостатки: недостаточно высокие показатели количества, качества, надежности, точности контролируемых функций в системе движений. Хвостовик не имеет жесткого соединения с сиденьем оператора, отсутствие точной регулировки высоты управляющего элемента и точной регулировки расстояния между оператором и управляющим элементом, а также отсутствие управляющих элементов для ног, датчиков движения, отслеживающих положение головы, рук, плеч оператора. Управляющий элемент не имеет возможность регулировки Н-образной рамы по ширине плеч оператора, отсутствие возможности регулирования жесткости хода шарнира в зависимости от веса оператора, ситуации, происходящей в системе движений.
Наиболее близким техническим решением из известных является описание изобретения к патенту РФ №№2556498, устройство контроля системы движений, МПК G06F 3/00, от 01.07.2014, опубл. 10.07.2015 в Бюл. №19, содержащее кнопки, корпус, жестко соединенный с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями, на передних частях которого по периферии напротив друг друга с боковых сторон расположены кнопки и ролики, внутри установлен шарнир, на котором жестко закреплен хвостовик, на управляющем элементе, выполненном в виде Н-образной рамы, между криволинейными опорными поверхностями установлены зажимы, а внутри корпуса расположен регулятор, контролирующий жесткость хода шарнира. Для контроля системы движений дополнительно введены педали и датчики движения, соединенные с управляющим элементом проводами или беспроводной связью, а хвостовик жестко соединен с кронштейном крепления, имеющим регулировочные зажимы. Недостатки: недостаточно высокие показатели количества, качества, надежности, точности контролируемых функций в системе движений. Криволинейные опорные поверхности не имеют возможности точной настройки угла расположения относительно тела оператора и управляющего элемента, точного распределения веса предплечья оператора относительно управляющего элемента. Управление каждой рукой отдельно не позволяет достигнуть высоких показателей количества, качества, надежности, точности контролируемых функций в системе движений.
Технический результат: повышение показателей количества, качества, надежности, точности контролируемых функций в системе движений.
Технический результат в устройстве контроля системы движений, содержащем кнопки, корпус, жестко соединенный с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями, на передних частях которого по периферии напротив друг друга с боковых сторон расположены кнопки и ролики, внутри установлен шарнир, на котором жестко закреплен хвостовик, на управляющем элементе, выполненном в виде Н-образной рамы, между криволинейными опорными поверхностями установлены зажимы, а внутри корпуса расположен регулятор, контролирующий жесткость хода шарнира, в устройство для контроля системы движений введены педали и датчики движения, соединенные с управляющим элементом проводами или беспроводной связью, а хвостовик жестко соединен с кронштейном крепления, имеющим регулировочные зажимы, достигается за счет того, что криволинейные опорные поверхности оснащены регулятором, контролирующим положение криволинейных опорных поверхностей на управляющем элементе, а для контроля системы движений в дополнительном аналоговом и смешанном режимах введены по меньшей мере два дополнительных управляющих элемента, соединенных с управляющим элементом проводами или беспроводной связью, на передних частях которых по периферии друг против друга с боковых сторон расположены кнопки и ролики, при этом форма каждого дополнительного управляющего элемента может быть выполнена различной по объему и конфигурации, криволинейной эргономичной формы необходимой для конкретной игры или для конкретной среды применения устройства контроля системы движений.
В отличие от аналогов в заявляемом устройстве, за счет оснащения криволинейных опорных поверхностей регулятором, который позволяет максимально точно выставить угол расположения криволинейных опорных поверхностей относительно тела оператора и управляющего элемента, что создает оператору максимально комфортные условия управления, повышая качество его работы путем увеличения времени его точной, надежной, безотказной работы, причем регулятор также позволяет максимально точно выбрать центральную точку опоры криволинейных опорных поверхностей, относительно предплечий оператора и управляющего элемента, это позволяет оператору максимально точно распределить вес своих предплечий относительно управляющего элемента, что повышает надежность, показатели количества, качества, точности контролируемых функций в системе движений при выполнении задач.
При работе заявляемого устройства за счет оснащения устройства по меньшей мере двумя дополнительными управляющими элементами, контролирующими систему движений в дополнительном аналоговом и смешанном режимах, что позволяет оператору вести управление двумя держащими дополнительные управляющие элементы руками или совместно, держа одной рукой дополнительный управляющий элемента, а второй рукой, лежащей на управляющем элементе, выполняя каждой рукой отдельную задачу, что увеличивает надежность при необходимости выполнения двух разных задач одновременно, увеличивает количество возможных к одновременному выполнению задач за счет взаимодействия оператора с кнопками, роликами, расположенными на дополнительных управляющих элементах, сокращает общее время выполнения задач и увеличивает качество выполнения задачи за счет возможности выполнения одной задачи двумя независимыми руками, держащими дополнительные управляющие элементы или один дополнительный управляющий элемент, путем взаимодействия оператора с кнопками, роликами, расположенными на дополнительных управляющих элементах, позволяющем оператору в аналоговом режиме применять функции из классического режима.
Наличие отличительных от прототипа существенных признаков позволяет признать заявляемое техническое решение новым.
Из уровня техники не выявлены технические решения, содержащие признаки, совпадающие с отличительными признаками заявляемого устройства, поэтому заявляемое устройство отвечает критерию изобретательского уровня.
Возможность осуществления заявляемого изобретения в промышленности позволяет признать его соответствующим критерию промышленной применимости.
Устройство контроля системы движений поясняется чертежом, где
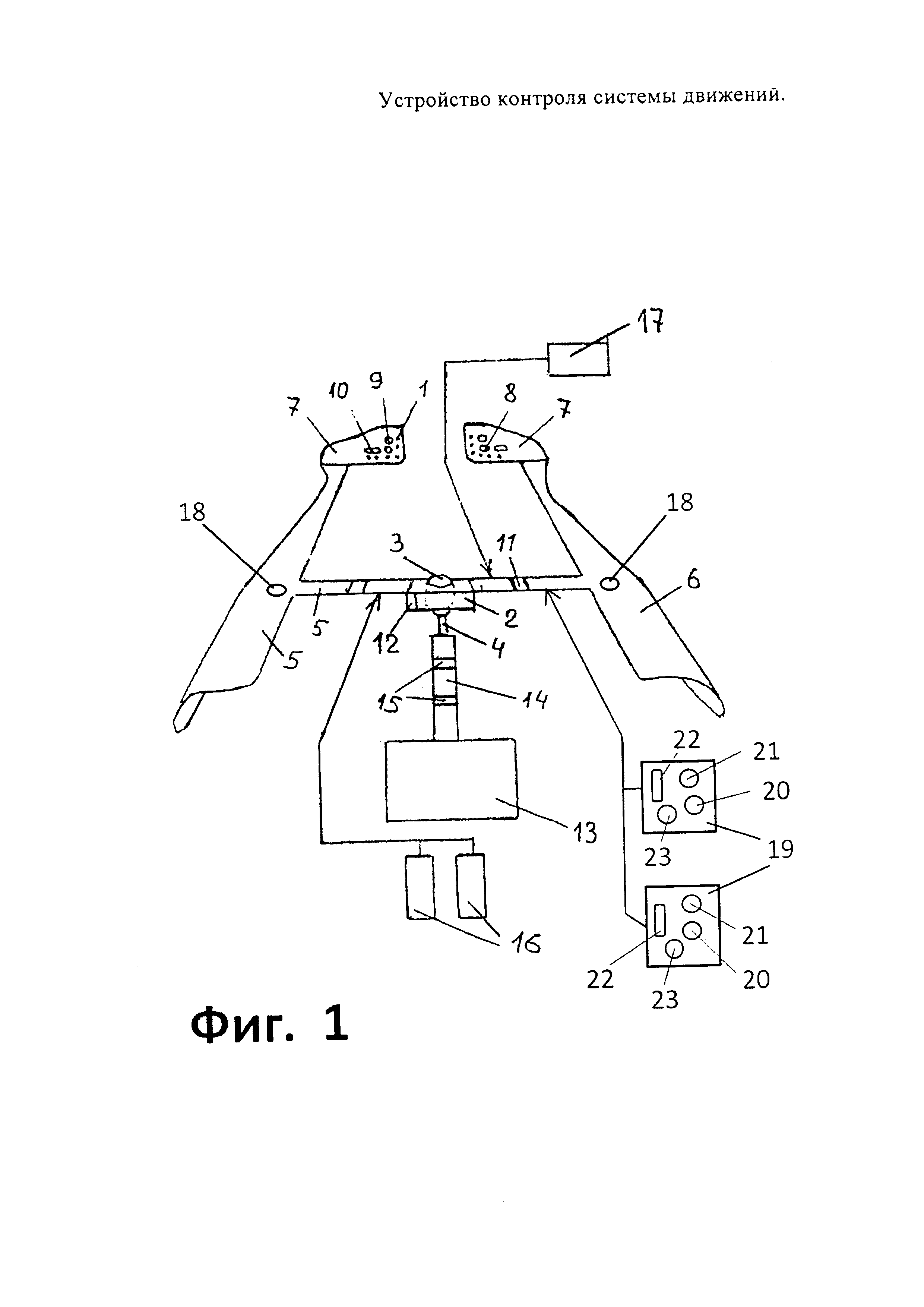
на фиг. 1 изображен общий вид устройства;
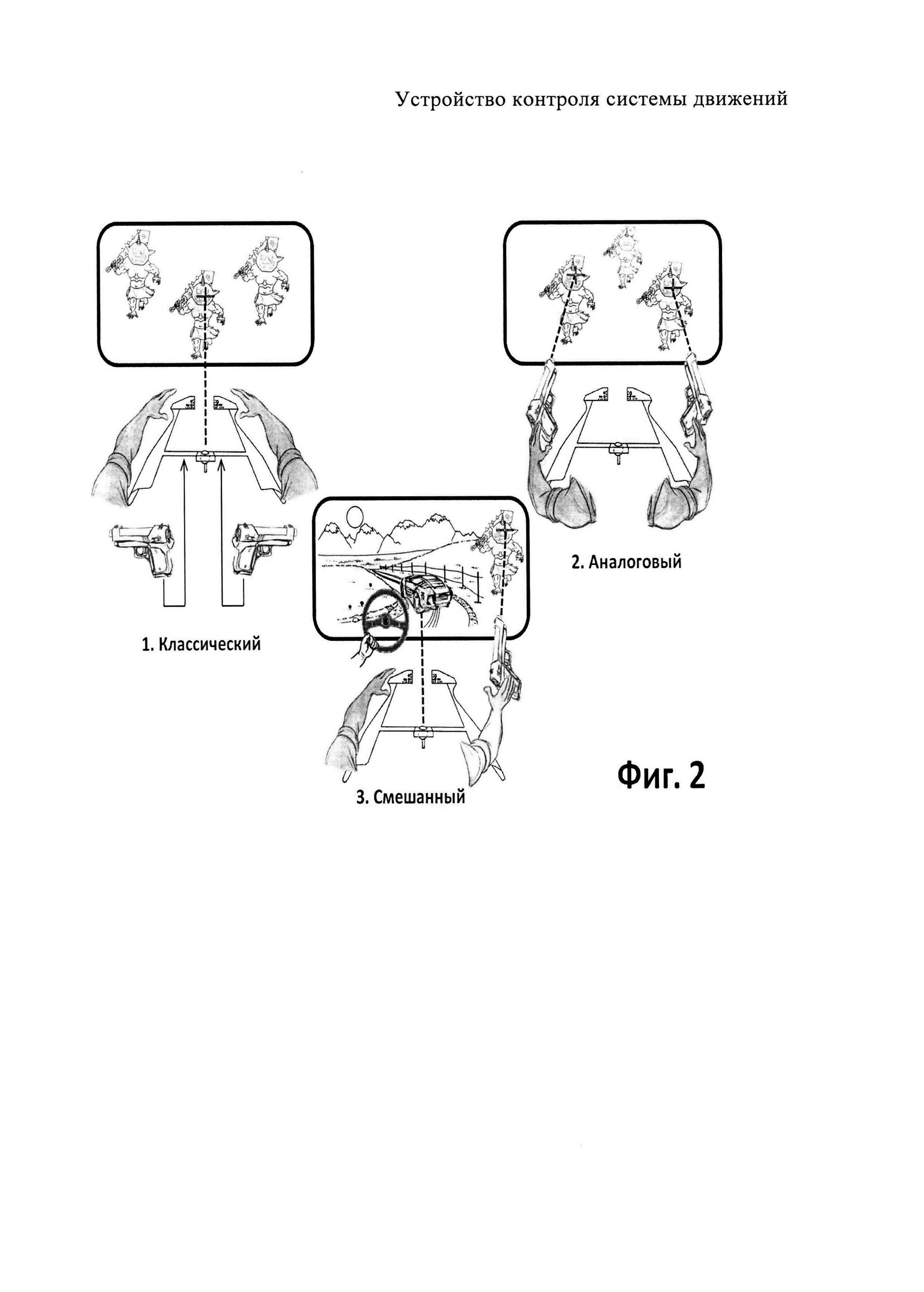
на фиг. 2 схематично изображена работа устройства в классическом, аналоговом и смешанном режимах, в которых каждый управляющий элемент выполнен в форме пистолета.
Устройство контроля системы движений включает в себя кнопки 1, корпус 2, внутри корпуса 2 установлен шарнир 3, на котором жестко закреплен хвостовик 4, жестко соединенный с сиденьем оператора 13, кронштейном 14 с зажимами 15, причем корпус 2 жестко соединен с управляющим элементом 5, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями 6 для расположения предплечий оператора с возможностью движения за счет шарнира 3, жесткость хода которого может регулироваться с помощью расположенного в корпусе 2 регулятора 12 по желанию оператора или автоматически в зависимости от ситуации, происходящей в системе движений. На передних частях 7 управляющего элемента 5 по периферии напротив друг друга с боковых сторон расположены кнопки 1, кнопки шарнирные 8, кнопки многоконтактные 9, ролики 10 для надежного и точного управления системой движений, причем управляющий элемент 5 имеет возможность регулировки Н-образной рамы за счет расположенных на ней зажимов 11 по ширине между криволинейными опорными поверхностями 6. Криволинейные опорные поверхности 6 оснащены регулятором 18, контролирующим положение криволинейных опорных поверхностей 6 на управляющем элементе 5. Устройство для контроля системы движений оснащено педалями 16 и датчиками движения 17, соединенными с управляющим элементом 5 проводами или беспроводной связью, для контроля системы движений дополнительно по меньшей мере двумя дополнительными управляющими элементами 19, контролирующими систему движений в дополнительном аналоговом и смешанном режимах, которые соединены с управляющим элементом 5 проводами или беспроводной связью. На передних частях указанных элементов 19 по периферии друг против друга с боковых сторон расположены кнопки 20 кнопки многоконтактные 21, кнопки шарнирные 23 и ролики 22. Форма каждого дополнительного управляющего элемента 19 может быть выполнена различной по объему и конфигурации, элемент может быть выполнен в виде пистолета, другого вида оружия, криволинейной эргономичной формы, необходимой для конкретной игры, или криволинейной эргономичной формы, необходимой для конкретной среды применения.
Работа устройства
Устройство контроля системы движений работает следующим образом. Оператор посредством кронштейна 14 с зажимами 15 максимально точно выбирает точку опоры управляющего элемента 5, жестко закрепляет в ней хвостовик 4, жестко соединенный с шарниром 3. Оператор сидит на сиденье 13 перед корпусом 2, предплечья рук ложатся на управляющий элемент 5, выполненный в виде Н-образной рамы с криволинейными опорными поверхностями 6 для расположения предплечий оператора с возможностью движения за счет шарнира 3, жестко закрепленного с сиденьем 13 посредством хвостовика 4 и кронштейна 14 с зажимами 15. Оператор устанавливает точную для себя ширину управляющего элемента 5 при помощи зажимов 11, устанавливает точный для себя угол расположения криволинейных опорных поверхностей 6 относительно своего тела и управляющего элемента 5, при помощи регулятора 18, устанавливает точную для себя точку расположения криволинейных опорных поверхностей 6 относительно своих предплечий и управляющего элемента 5, при помощи регулятора 18. Управляющий элемент 5, жестко соединенный с корпусом 2, в котором расположен шарнир 3, за счет которого управляющий элемент 5 получает возможность движения, причем в корпусе 2 установлен регулятор 12, контролирующий жесткость хода шарнира 3, и оператор перед началом работы устанавливает нужный уровень жесткости хода шарнира 3 при помощи регулятора 12. Система движений частично контролируется предплечьями оператора, лежащими на криволинейных опорных поверхностях 6, частично контролируется кистями оператора, лежащими на передних частях 7 управляющего элемента 5, частично контролируется ногами оператора посредством педалей 16, частично контролируется движениями головы, рук, плеч оператора, посредством датчиков движения 17, частично контролируется руками оператора, держащими дополнительные управляющие элементы 19. Так как регулятор 12, расположенный в корпусе 2, то во время работы манипулятора автоматически контролирует жесткость хода шарнира 3 в корпусе 2 в зависимости от ситуации в системе движений, у оператора возникает эффект «обратной связи» и более четкое восприятие системы движений, а в смешанном режиме управления регулятор 12 оставляет свободный ход только на одной оси вращения, превращая управляющий элемент 5 в подобие автомобильного руля. Так как часть системы движений контролируется ногами оператора посредством педалей 16, оператор глубже погружается в пространство, моделируемое на электронной вычислительной машине (далее ЭВМ), у оператора возникает эффект «присутствия внутри» моделируемого на ЭВМ пространства. Так как часть системы движений контролируется движениями головы, рук и плеч оператора, посредством датчиков движения 17 у оператора появляются новые функции в системе движений. Так как часть системы движений контролируется руками оператора, держащими дополнительные управляющие элементы 19, у оператора возникает возможность управления двумя руками в аналоговом и смешанном режимах, работать параллельно с разными задачами или выполнять одну задачу двумя руками, где пальцы рук оператора взаимодействуют с кнопками 1, кнопками шарнирными 8, кнопками многоконтактными 9 и роликами 10, расположенными на передних частях 7 управляющего элемента 5 по периферии напротив друг друга с боковых сторон для точного управления системой движений, а также пальцы рук оператора взаимодействуют с кнопками 20 дополнительного управляющего элемента 19, кнопками многоконтактными 21 дополнительного управляющего элемента 19, кнопками шарнирными 23 дополнительного управляющего элемента 19 и роликами 22 дополнительного управляющего элемента 19, расположенными на передних частях дополнительно введенных по меньшей мере двух дополнительных управляющих элементов 19 по периферии друг против друга с боковых сторон для точного управления системой движений.
Пример 1
Оператор посредством кронштейна 14 с зажимами 15 максимально точно выбирает точку опоры управляющего элемента 5, жестко закрепляет в ней хвостовик 4, жестко соединенный с шарниром 3. Оператор сидит на сиденье 13 перед корпусом 2, предплечья рук ложатся на управляющий элемент 5, выполненный в виде Н-образной рамы с криволинейными опорными поверхностями 6 для расположения предплечий оператора с возможностью движения за счет шарнира 3, жестко закрепленного с сиденьем 13 посредством хвостовика 4 и кронштейна 14 с зажимами 15. Оператор устанавливает точную для себя ширину управляющего элемента 5 при помощи зажимов 11, устанавливает точный для себя угол расположения криволинейных опорных поверхностей 6 относительно своего тела и управляющего элемента 5, при помощи регулятора 18, устанавливает точную для себя точку расположения криволинейных опорных поверхностей 6 относительно своих предплечий и управляющего элемента 5, при помощи регулятора 18.
Оператор перед началом работы устанавливает нужный уровень жесткости хода шарнира 3 при помощи регулятора 12. Система движений частично контролируется предплечьями оператора, лежащими на криволинейных опорных поверхностях 6, частично контролируется кистями оператора, лежащими на передних частях 7 управляющего элемента 5, частично контролируется ногами оператора посредством педалей 16, частично контролируется движениями головы, рук, плеч оператора посредством датчиков движения 17, частично контролируется руками оператора, держащими дополнительные управляющие элементы 19. Так как регулятор 12, расположенный в корпусе 2, во время работы манипулятора автоматически контролирует жесткость хода шарнира 3 в корпусе 2 в зависимости от ситуации в системе движений, у оператора возникает эффект «обратной связи» и более четкое восприятие системы движений. Так как часть системы движений контролируется ногами оператора посредством педалей 16, оператор глубже погружается в пространство, моделируемое на ЭВМ, у оператора возникает эффект «присутствия внутри» моделируемого на ЭВМ пространства. Ногами посредством педалей 16 оператор контролирует относящиеся к ногам функции, такие как «ходить и бегать, вперед-назад» или перемещать транспорт «вперед-назад». Так как часть системы движений контролируется движениями головы, рук и плеч посредством датчиков движения 17, у оператора появляются новые функции в системе движений. Одной из новых функций в системе движений является возможность «выглянуть из-за угла», не перемещая тело контролируемого объекта, оператор отклоняется сам, а датчики движения 17, контролирующие положение головы, рук и плеч, создают этот эффект в моделируемом на ЭВМ пространстве. Так как часть системы движений контролируется руками оператора, держащими дополнительные управляющие элементы 19, у оператора возникает возможность управления двумя руками в аналоговом и смешанном режимах, работать параллельно с разными задачами или выполнять одну задачу двумя руками, держащими дополнительные управляющие элементы 19, новой функцией является возможность «стрелять» сразу по двум разным целям одновременно, при этом выполняя другие функции путем взаимодействия пальцев рук оператора с кнопками 20 дополнительного управляющего элемента 19, кнопками многоконтактными 21 дополнительного управляющего элемента 19, роликами 22 дополнительного управляющего элемента 19, кнопками шарнирными 23 дополнительного управляющего элемента 19, или в смешанном режиме одной рукой «управлять автомобилем», а другой «стрелять», оператор сам принимает решение, в каком режиме управлять системой движений, причем в аналоговом режиме у оператора остается возможность применять различные функции из классического режима посредством взаимодействия пальцев рук оператора с кнопками 20 дополнительного управляющего элемента 19, кнопками многоконтактными 21 дополнительного управляющего элемента 19, роликами 22 дополнительного управляющего элемента 19, кнопками шарнирными 23 дополнительного управляющего элемента 19.
Например, в случае управления беспилотным летательным аппаратом, оператор может подлететь к нужному объекту в классическом режиме, остановиться перед объектом на нужной высоте и нужном расстоянии, а затем, перейдя в аналоговый режим, двумя руками начать выполнять поставленную задачу, при этом управляющие элементы могут быть криволинейной эргономичной формы, необходимой для конкретной среды применения, устройства контроля системы движений. Пальцы рук оператора взаимодействуют с кнопками 1, кнопками шарнирными 8, кнопками многоконтактными 9 и роликами 10, расположенными на передних частях 7 управляющего элемент 5 и по периферии напротив друг друга с боковых сторон передней части 7 для надежного и точного управления системой движений, а также пальцы оператора взаимодействуют с кнопками 20 дополнительного управляющего элемента 19, кнопками многоконтактными 21 дополнительного управляющего элемента 19, кнопками шарнирными 23 дополнительного управляющего элемента 19, и роликами 22 дополнительного управляющего элемента 19, расположенными на передних частях дополнительно введенных по меньшей мере двух дополнительных управляющих элемента 19 по периферии друг против друга с боковых сторон для надежного и точного управления системой движений.
Технико-экономические показатели
Использование заявляемого устройства позволит повысить показатели количества, качества, надежности, точности контролируемых функций в системе движений.
Реферат
Изобретение относится к устройствам ввода. Технический результат заключается в повышении показателей количества, качества, надежности, точности контролируемых функций в системе движений и достигается за счет того, что устройство содержит кнопки, корпус, жестко соединенный с управляющим элементом, выполненным в виде Н-образной рамы с криволинейными опорными поверхностями, на передних частях которого по периферии напротив друг друга с боковых сторон расположены кнопки и ролики, внутри установлен шарнир, на котором жестко закреплен хвостовик, на управляющем элементе, выполненном в виде Н-образной рамы, между криволинейными опорными поверхностями установлены зажимы, а внутри корпуса расположен регулятор, контролирующий жесткость хода шарнира, педали и датчики движения, соединенные с управляющим элементом проводами или беспроводной связью, хвостовик жестко соединен с кронштейном крепления, имеющим регулировочные зажимы, криволинейные опорные поверхности оснащены регулятором, контролирующим их положение на управляющем элементе, два дополнительных управляющих элемента, соединенных с управляющим элементом проводами или беспроводной связью, на передних частях которых по периферии друг против друга с боковых сторон расположены кнопки и ролики. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство контроля системы движений
Комментарии