Автоматическая машина для уборки - RU2695047C2
Код документа: RU2695047C2
Чертежи





Описание
[001] Эта заявка испрашивает приоритет заявки № 105118692, поданной в Тайване (Республике Китай) 15 июня 2016, и № 105123054, поданной в Тайване (Республике Китай) 21 июля 2016 согласно 35 USC 119, все содержание которых включено в настоящий документ посредством ссылки.
Предпосылки создания изобретения
Область техники
[002] Настоящее изобретение относится к автоматической машине для уборки и, в частности, к автоматической машине для уборки, содержащей возвратно-поступательно очищающий механизм.
Известный уровень техники
[003] В настоящее время доступный в продаже подметающий робот для уборки предназначен в основном для удаления пыли. Он обычно содержит боковую щетку и отверстие вакуумного всасывания и может дополнительно содержать центральную щетку или протирочную ткань для протирания. Однако, поскольку протирочная ткань только тянется роботом, эффект уборки следов от пятен воды, отпечатков следов и мелких частиц ограничен.
[004] В документе US 20060190133 раскрыт доступный в продаже моющий робот (такой как iRobot Scooba), который распыляет воду (модуль 700 для нанесения жидкости) на пол и который чистит (щетка 612 для растирания) пол посредством центральной щетки, а затем повторно использует воду посредством резинового скребка. Его недостатком является то, что вода будет оставаться на полу, когда пол неровный. Робот не может быть эффективно применен, если пол имеет щели.
[005] Разработан доступный в продаже протирающий робот (такой как очиститель для пола Mint’s), который тянет протирочную ткань и двигается назад и вперед для протирки пола. Его недостатком является то, что пыль будет накапливаться спереди протирочной ткани и не может быть собрана в роботе. Его эффект уборки ограничен, поскольку частота вытирания является малой.
[006] Требуется разработка усовершенствованного робота для уборки, который может исправить указанные выше недостатки традиционных роботов.
Краткое описание изобретения
[007] Целью варианта осуществления настоящего изобретения является предоставление автоматической машины для уборки, содержащей возвратно-поступательно очищающий механизм для возвратно-поступательной очистки пола; перемещающее устройство для передвижения машины; систему управления и множество датчиков для обнаружения препятствия и определения расстояния от окружающей среды для создания карты для планирования маршрута уборки. В одном варианте осуществления автоматическая машина для уборки дополнительно содержит вакуумное устройство, применяемое для всасывания пыли спереди протирочной ткани на полу. В одном варианте осуществления автоматическая машина для уборки дополнительно содержит распылительное устройство, применяемое для распыления воды на полу.
[008] Согласно варианту осуществления настоящего изобретения автоматическая машина для уборки содержит возвратно-поступательно очищающий механизм, перемещающее устройство и систему управления. Возвратно-поступательно очищающий механизм содержит по меньшей мере одно устройство для уборки и по меньшей мере одно двигающееся возвратно-поступательно устройство. По меньшей мере одно устройство для уборки применяется для соприкосновения с полом. По меньшей мере одно двигающееся возвратно-поступательно устройство соединено по меньшей мере с одним устройством для уборки и обеспечивает возможность по меньшей мере одному устройству для уборки возвратно-поступательно очищать пол. Перемещающее устройство применяется для обеспечения перемещения автоматической машины для уборки по полу. Система управления связана с возвратно-поступательно очищающим механизмом и перемещающим устройством и применяется для управления возвратно-поступательно очищающим механизмом и перемещающим устройством.
[009] В одном варианте осуществления по меньшей мере одно устройство для уборки содержит первое устройство для уборки и второе устройство для уборки. По меньшей мере одно двигающееся возвратно-поступательно устройство применяется для обеспечения передвижения первого устройства для уборки в первом направлении и обеспечения передвижения второго устройства для уборки во втором направлении, противоположном первому направлению.
[0010] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит корпус. Корпус применяется для размещения по меньшей мере одного двигающегося возвратно-поступательно устройства возвратно-поступательно очищающего механизма, системы управления и перемещающего устройства. По меньшей мере одно устройство для уборки содержит пластину щетки, ролик и протирочную ткань. Пластина щетки размещена ниже основания корпуса. Ролик расположен между пластиной щетки и корпусом и вращается на пластине щетки или основании для уменьшения фрикционного сопротивления относительному движению пластины щетки и основания. Протирочная ткань размещена на пластине щетки и применяется для соприкосновения с полом.
[0011] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит корпус и упругий элемент. Корпус применяется для размещения по меньшей мере одного двигающегося возвратно-поступательно устройства возвратно-поступательно очищающего механизма, системы управления и перемещающего устройства. Упругий элемент размещен между перемещающим устройством и корпусом, таким образом, упругий элемент выполнен с возможностью выталкивания перемещающего устройства в направлении от автоматической машины для уборки.
[0012] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит вакуумное устройство. Вакуумное устройство содержит входное отверстие. Пыль на полу всасывается во входное отверстие потоком воздуха. По меньшей мере одно устройство для уборки содержит первое устройство для уборки. Входное отверстие размещено спереди первого устройства для уборки в пределах предварительно определенного расстояния от первого устройства для уборки, при этом в пределах предварительно определенного расстояния пыль не накапливается.
[0013] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит распылительное устройство, применяемое для распыления воды на полу.
[0014] В одном варианте осуществления перемещающее устройство содержит подвижный колесный модуль и кожух. Кожух вмещает подвижный колесный модуль и содержит втулку. Корпус содержит основание, фиксирующий стержень, кольцевой стопор и фиксирующий винт. Фиксирующий стержень размещен на основании и выступает от основания. Втулка соединена на внешней кольцевой поверхности фиксирующего стержня. Кольцевой стопор размещен на верхней стороне фиксирующего стержня. Фиксирующий винт ввинчен в фиксирующий стержень, таким образом, кольцевой стопор прикреплен на верхней стороне фиксирующего стержня. Один конец упругого элемента упирается торцом в кольцевой стопор, а другой конец упругого элемента упирается торцом в часть кожуха перемещающего устройства.
[0015] В одном варианте осуществления по меньшей мере одно двигающееся возвратно-поступательно устройство содержит электродвигатель, коленчатый вал, по меньшей мере один кривошип. Коленчатый вал приводится в действие электродвигателем для вращения. Один конец по меньшей мере одного кривошипа соединен с коленчатым валом, а другой конец по меньшей мере одного кривошипа соединен с пластиной щетки по меньшей мере одного устройства для уборки и поэтому двигается возвратно-поступательно при вращении коленчатого вала.
[0016] В одном варианте осуществления входное отверстие вакуумного устройства размещено на пластине щетки первого устройства для уборки.
[0017] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит электрическую щетку. Входное отверстие вакуумного устройства размещено в основании корпуса. Электрическая щетка размещена на основании и сметает пыль во входное отверстие.
[0018] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит по меньшей мере один датчик, размещенный на передней или нижней стороне корпуса и применяемый для обнаружения препятствия или ступеньки.
[0019] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит буфер и ограничительный выключатель. буфер размещен на внешней стороне автоматической машины для уборки. Ограничительный выключатель применяется для нажатия буфером после того, как буфер наталкивается на препятствие.
[0020] В одном варианте осуществления автоматическая машина для уборки дополнительно содержит датчик измерения расстояния, применяемый для измерения расстояния от окружающей среды для создания карты для планирования маршрута уборки.
[0021] Различные варианты настоящего изобретения могут достичь следующих технических усовершенствований. В одном варианте осуществления автоматическая машина для уборки содержит возвратно-поступательно очищающий механизм. Частота очистки протирочной ткани может быть увеличена, таким образом, может быть получена высокоэффективная машина для уборки. В одном варианте осуществления автоматическая машина для уборки содержит вакуумное устройство, которое выполнено с возможностью всасывания пыли и грязи, накопленных спереди протирочной ткани. В одном варианте осуществления, автоматическая машина для уборки содержит распылительное устройство. Распылительное устройство правильно распыляет воду для сохранения протирочной ткани оптимально увлажненной, таким образом, может быть достигнут лучший эффект уборки. В одном варианте осуществления автоматическая машина для уборки содержит все из вышеупомянутых устройств и реализована с помощью программы искусственного интеллекта для обеспечения возможности машине убрать пол всей комнаты.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0022] Перечисленные особенности, аспекты и преимущества настоящего изобретения будут теперь описаны со ссылкой на графические материалы предпочтительных вариантов осуществления, которые предназначены для иллюстрации, а не ограничения изобретения.
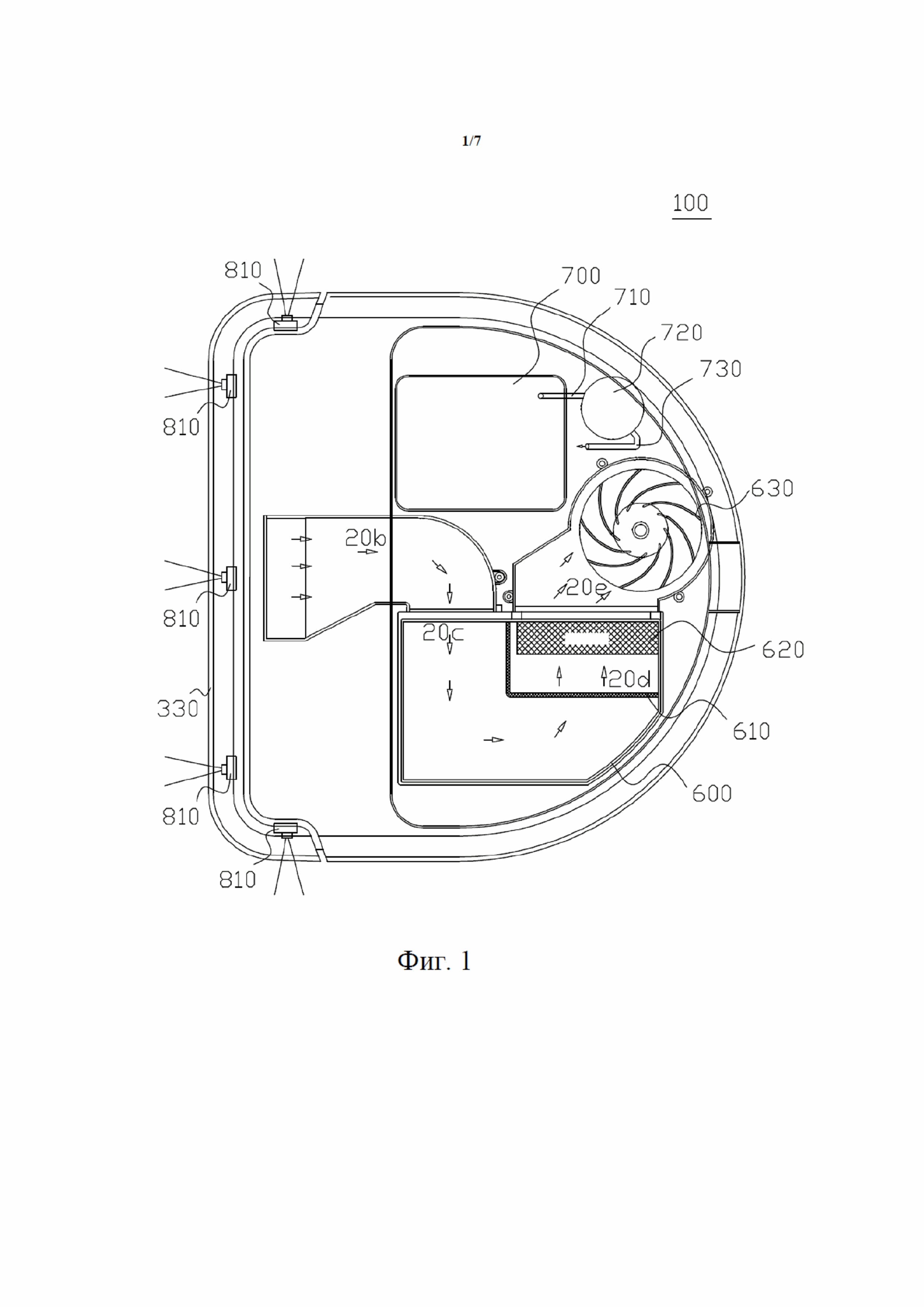
На фиг. 1 показан вид сверху автоматической машины для уборки согласно варианту осуществления настоящего изобретения.
На фиг. 2 показан вид снизу автоматической машины для уборки согласно варианту осуществления настоящего изобретения.
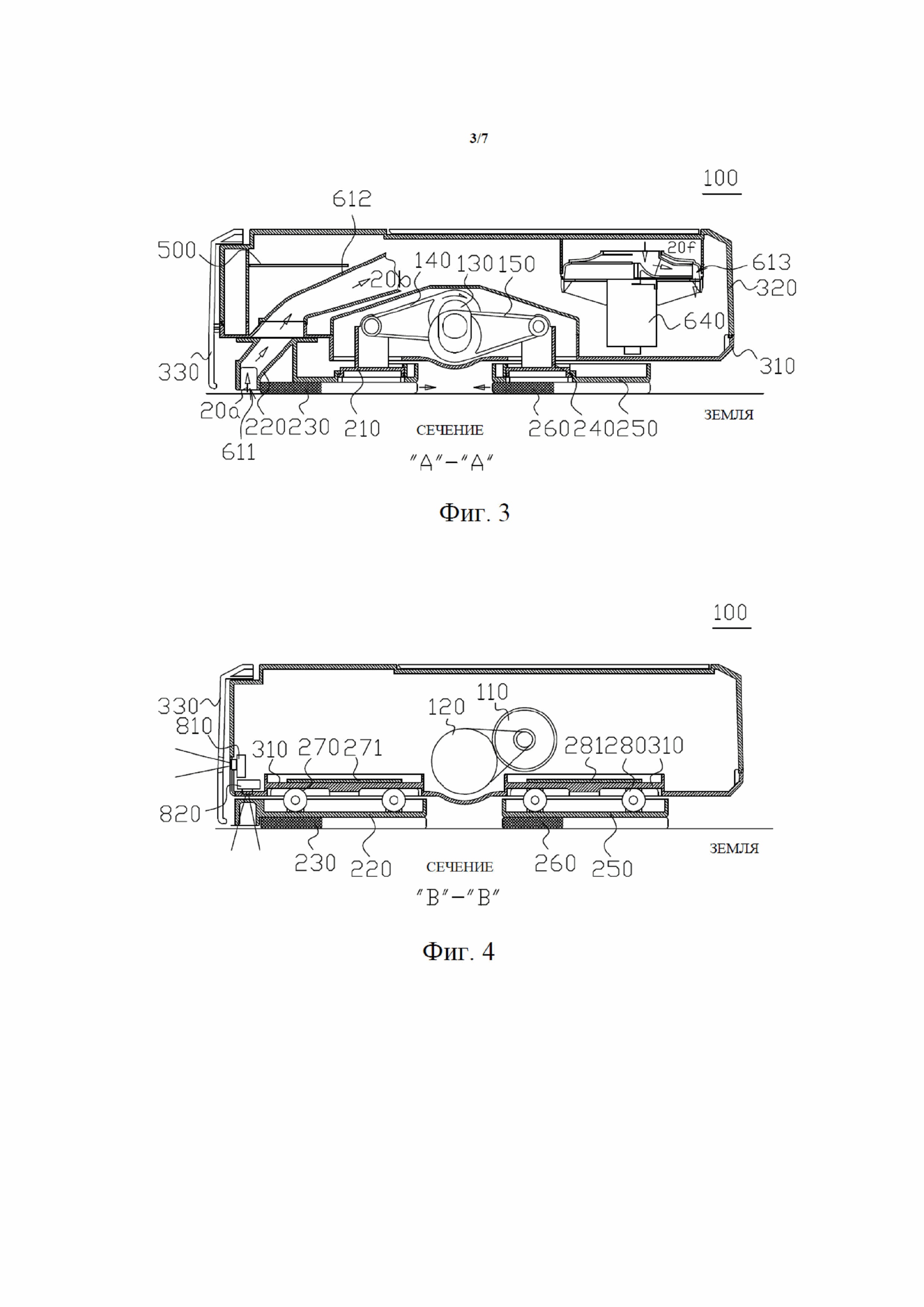
На фиг. 3 показан вид в сечении по линии сечения A-A по фиг. 2.
На фиг. 4 показан вид в сечении по линии сечения B-B по фиг. 2.
На фиг. 5 показан вид в сечении по линии сечения C-C по фиг. 2.
На фиг. 6 показан вид в сечении по линии сечения K-K по фиг. 2.
На фиг. 7 показан вид в сечении по линии сечения, соответствующей линии A-A на фиг. 2, в автоматической машине для уборки согласно одному варианту осуществления настоящего изобретения.
На фиг. 8 показан схематический вид возвратно-поступательно очищающего механизма согласно другому варианту осуществления настоящего изобретения.
На фиг. 9 показана функциональная блок-схема системы управления согласно одному варианту осуществления настоящего изобретения.
На фиг. 10 показан вид сверху автоматической машины для уборки согласно другому варианту осуществления настоящего изобретения.
Подробное описание изобретения
[0023] Эти и другие варианты осуществления настоящего изобретения также станут очевидными для специалистов в данной области техники из следующего подробного описания предпочтительных вариантов осуществления со ссылками на прилагаемые фигуры; однако изобретение не ограничено каким-либо конкретным вариантом (вариантами) осуществления, раскрытым в данном документе. Соответственно, объем настоящего изобретения предназначен для определения только посредством ссылки на прилагаемую формулу изобретения.
[0024] В соответствии с традиционным роботом пол очищается протирочной тканью, которую тянет робот, который движется назад и вперед, так что количество раз прохода робота по полу является количеством раз очистки пола. В соответствии с другими традиционными роботами робот только подметает пол без распыления воды. Соответственно, традиционные роботы не могут эффективно убирать следы от пятен воды, отпечатки следов и мелкие частицы. Согласно одному варианту осуществления настоящего изобретения предложена автоматическая машина для уборки, которая содержит возвратно-поступательно очищающий механизм, возвратно-поступательно очищающий пол на высокой скорости; и пару перемещающих колес для передвижения машины. В одном варианте осуществления машина дополнительно содержит распылительное устройство, применяемое для распыления воды на полу. В одном варианте осуществления машина может дополнительно содержать микропроцессорную систему управления и ряд датчиков, которые обнаруживают препятствия и очертания окружающей среды и планируют маршрут уборки. Особая конструкция будет подробно описана ниже.
[0025] На фиг. 1 показан вид сверху автоматической машины для уборки согласно одному варианту осуществления настоящего изобретения. На фиг. 2 показан вид снизу автоматической машины для уборки согласно одному варианту осуществления настоящего изобретения. На фиг. 3 показан вид в сечении по линии сечения A-A по фиг. 2. На фиг. 4 показан вид в сечении по линии сечения B-B по фиг. 2. На фиг. 5 показан вид в сечении по линии сечения C-C по фиг. 2. На фиг. 6 показан вид в сечении по линии сечения K-K по фиг. 2.
[0026] Рассмотрим возвратно-поступательно очищающий механизм. Как показано на фиг. 2-6, возвратно-поступательно очищающий механизм согласно одному варианту осуществления настоящего изобретения содержит электродвигатель 110, устройство 120 шкива, коленчатый вал 130, по меньшей мере один кривошип и по меньшей мере одно устройство для уборки. В одном варианте осуществления по меньшей мере один кривошип содержит два кривошипа 140 и 150, и при этом два устройства для уборки расположены на кривошипах 140 и 150, соответственно. Как показано на фиг. 4, работа электродвигателя 110 заставляет коленчатый вал 130 вращаться посредством болта устройства 120 шкива, для снижения скорости вращения коленчатого вала 130. Как показано на фиг. 3, по меньшей мере один кривошип преобразовывает вращение коленчатого вала 130 в линейное возвратно-поступательное движение по меньшей мере одного кривошипа. В этом варианте осуществления вращение коленчатого вала 130 управляет линейными возвратно-поступательными движениями кривошипов 140 и 150. Предпочтительно, фазовый угол между кривошипами 140 и 150 составляет 180°, таким образом, устройства для уборки, размещенные на свободных концах кривошипов 140 и 150, линейно и возвратно-поступательно двигаются в противоположных направлениях, соответственно.
[0027] Обратимся к фиг. 3. Переднее устройство для уборки содержит трипод 210, переднюю пластину 220 щетки и протирочную ткань 230. Трипод 210 соединен между свободным концом кривошипа 140 и передней пластиной 220 щетки. Протирочная ткань 230 размещена на поверхности нижней стороны переднего диска 220 щетки или прикреплена к ней. Свободный конец кривошипа 140 толкает трипод 210, тем самым толкая переднюю пластину 220 щетки, таким образом, передняя протирочная ткань 230, прикрепленная к передней пластине 220 щетки, движется возвратно-поступательно назад и вперед на полу. Заднее устройство для уборки содержит трипод 240, заднюю пластину 250 щетки и протирочную ткань 260. Трипод 240 соединен между свободным концом кривошипа 150 и задней пластиной 250 щетки. Протирочная ткань 260 размещена на поверхности нижней стороны заднего диска 250 щетки или прикреплена к ней. Свободный конец кривошипа 150 толкает трипод 240, тем самым толкая заднюю пластину 250 щетки, таким образом, задняя протирочная ткань 260, прикрепленная к задней пластине 250 щетки, движется возвратно-поступательно назад и вперед на полу.
[0028] Передняя и задняя пластины 220 и 250 щетки представлены движущимися в противоположных направлениях, таким образом, реактивные силы могут компенсировать друг друга, и, следовательно, автоматическая машина 100 для уборки может работать стабильно. Обратимся к фиг. 2 и 4. Переднее устройство для уборки дополнительно содержит по меньшей мере один ролик 270, и передняя пластина 220 щетки имеет две направляющие. Автоматическая машина 100 для уборки имеет корпус 320. Ролики 270 прикреплены к передней пластине 220 щетки и расположены между верхней поверхностью передней пластины 220 щетки и нижней поверхностью основания 310 корпуса 320. Как показано на фиг. 4, когда передняя пластина 220 щетки движется возвратно-поступательно назад и вперед, ролик 270 вращается на поверхности основания 310 или передней пластины 220 щетки для того, чтобы уменьшить фрикционное сопротивление относительному движению передней пластины 220 щетки и основания 310. В одном варианте осуществления желоб 271 выполнен на верхней стороне основания 310, и часть передней пластины 220 щетки размещена в желобе 271. Соответственно, передняя пластина 220 щетки не будет падать, поскольку она удерживается желобом 271, расположенным выше нее.
[0029] Заднее устройство для уборки дополнительно содержит по меньшей мере один ролик 280, и задняя пластина 250 щетки имеет две направляющие. Автоматическая машина 100 для уборки имеет корпус 320. Ролики 280 прикреплены к задней пластине 250 щетки и расположены между верхней поверхностью задней пластины 250 щетки и нижней поверхностью основания 310 корпуса 320. Когда задняя пластина 250 щетки движется возвратно-поступательно назад и вперед, ролик 280 вращается на поверхности основания 310 или задней пластины 250 щетки для того, чтобы уменьшить фрикционное сопротивление относительному движению задней пластины 250 щетки и основания 310. В одном варианте осуществления желоб 281 выполнен на верхней стороне основания 310, и часть задней пластины 250 щетки размещена в желобе 281. Соответственно, задняя пластина 250 щетки не будет падать, поскольку она удерживается желобом 281, расположенным выше нее.
[0030] Скорость вращения электродвигателя 110 может определять скорость очистки протирочной ткани 230 и 260, двигающейся назад и вперед. Предпочтительно, их скорость очистки составляет от 100 до 2000 раз в минуту, что является высокопроизводительным очищающим механизмом.
[0031] Как описано выше, хотя возвратно-поступательно очищающий механизм подробно описан в одном варианте осуществления. Однако настоящее изобретение не ограничено вышеупомянутой конструкцией. Возвратно-поступательно очищающий механизм может быть любой конструкции, при условии, что конструкция может преобразовывать движение вращения в линейное движение. Например, двигающийся возвратно-поступательно очищающий механизм в одном варианте осуществления может содержать кулачок и рычаг (не показаны). Рычаг примыкает к кулачку. Кулачок выполнен с поперечным сечением некруглой формы, которая может быть эллиптической; или содержит один конец, имеющий полуэллиптическое поперечное сечение, и другой конец, имеющий полукруглое поперечное сечение. Когда кулачок вращается, рычаг может двигаться возвратно-поступательно и линейно. На фиг. 8 показан схематический вид возвратно-поступательно очищающего механизма согласно другому варианту осуществления настоящего изобретения в качестве другого примера. Как показано на фиг. 8, в одном варианте осуществления возвратно-поступательно очищающий механизм содержит вращающееся колесо 131, тягу 141 и устройство 231 для уборки. Протирочная ткань 230 размещена на нижней стороне устройства 231 для уборки. Когда вращающееся колесо 131 вращается, оно тянет и двигает конец тяги 141, таким образом, устройство для уборки 231, присоединенное на другом конце тяги 141, двигается возвратно-поступательно и линейно. В результате протирочная ткань 230 может возвратно-поступательно очищать пол.
[0032] Рассмотрим вакуумное устройство. Несмотря на то, что пол может быть убран линейными возвратно-поступательными движениями передней и задней пластин 220 и 250 щетки, пыль будет накапливаться спереди протирочной ткани 230, то есть в месте, близком к подвижному входному отверстию 611 вакуумного устройства по фиг. 2. В одном варианте осуществления автоматическая машина 100 для уборки дополнительно содержит вакуумное устройство. Вакуумное устройство содержит электродвигатель 640 вакуумного насоса, лопастное колесо 630 и воздухопровод. Воздухопровод содержит подвижное входное отверстие 611, трубку 612, модуль (610 и 620) фильтра, пылесборник 600 и выходное отверстие 613. Лопастное колесо 630 вращается электродвигателем 640 вакуумного насоса для создания потока воздуха. Поток воздуха последовательно проходит через маршруты потоков 20a—20f воздуха в воздухопроводе.
[0033] Подвижное входное отверстие 611 вакуумного устройства расположено спереди переднего края передней протирочной ткани 230. Во время работы автоматической машины 100 для уборки, ее перемещающее устройство движется по направлению вперед. Вакуумное устройство предварительно всасывает частицы пыли, а затем передняя протирочная ткань 230 очищает часть пола, где располагались частицы пыли. Подвижное входное отверстие 611 расположено спереди переднего края передней протирочной ткани 230 в пределах предварительно определенного расстояния. С учетом этого, вакуумное устройство выполнено с возможностью всасывания пыли и грязи, накопленных спереди протирочной ткани 230, посредством применения потока 20a воздуха, таким образом, пыль и грязь не могут накапливаться спереди протирочной ткани 230. Для достижения цели, заключающейся в отсутствии накопления пыли и грязи, человек, имеющий обычную квалификацию в данной области техники, может выбрать вышеупомянутое определенное расстояние на основании опытов, проведенных в различных условиях, таких как различная эффективность вакуумных устройств и различные размеры подвижного входного отверстия 611. Определенное расстояние зависит от мощности вакуумного устройства и размера подвижного входного отверстия 611. Чем выше мощность вакуумного устройства, тем больше определенное расстояние. Как показано на фиг. 1 и 3, поток 20a воздуха входит во входное отверстие 611 вблизи переднего края пластины 220 щетки; поток 20b воздуха проходит через трубку 612. Как показано на фиг. 1, трубка 612 находится в сообщении с пылесборником 600; поток 20c воздуха проходит через первичный фильтр 610 модуля фильтра; поток 20d воздуха проходит через фильтр 620 высокого уровня модуля фильтра. Когда поток 20d воздуха переходит в поток 20e воздуха, большая часть грязи отфильтрована. Затем, поток 20e воздуха переходит в поток 20f воздуха, который затем выпускается из выходного отверстия 613. В результате пыль на полу может всасываться вакуумным устройством. В одном варианте осуществления фильтром 620 высокого уровня является высокоэффективный воздушный фильтр для улавливания частиц (HEPA-фильтр).
[0034] Рассмотрим перемещающее устройство. Обратимся к фиг. 2 и 5. Согласно одному варианту осуществления настоящего изобретения автоматическая машина 100 для уборки содержит два перемещающих устройства, каждое из которых содержит подвижный колесный модуль 400 и кожух 402. Кожух 402 применяется для размещения подвижного колесного модуля 400. Подвижные колесные модули 400 могут быть гусеничным колесом, которое содержит электродвигатель 430, по меньшей мере одно колесо 410 и гусеничную ленту 420. В одном варианте осуществления подвижные колесные модули 400 могут содержать колесо и электродвигатель для приведения в действие колеса. Электродвигатель 430 содержит редуктор, который соединен с колесом 410. Электродвигатель 430 приводит в действие колесо 410, и колесо 410 приводит в действие гусеничную ленту 420, таким образом, автоматическая машина 100 для уборки может перемещаться по полу. Как показано на фиг. 10, система 500 управления содержит цепь управления, соединенную с двумя электродвигателями 430. Система 500 управления дополнительно содержит программу для управления двумя электродвигателями 430, таким образом, автоматическая машина 100 для уборки может двигаться влево, вправо, вперед и назад. Программа может быть программой искусственного интеллекта, которая может управлять автоматической машиной 100 для уборки для очистки всего пола (подробности описаны ниже).
[0035] Рассмотрим конструкцию управления давлением для гусеничного колеса. Автоматическая машина 100 для уборки имеет две части, которые находятся в контакте с полом, одна является протирочной тканью 230, а другая является гусеничной лентой 420. Когда давление, приложенное к двум вышеуказанным частям, неодинаково, автоматическая машина 100 для уборки не может нормально работать. Если давление, приложенное к протирочным тканям 230 и 260, слишком велико, давление, приложенное к гусеничной ленте 420, является недостаточным и, как следствие, гусеничная лента 420 будет проскальзывать и не сможет передвигать машину. С другой стороны, если давление, приложенное к гусеничной ленте 420, слишком велико, давление, приложенное к протирочным тканям 230 и 260, является недостаточным и, как следствие, пол не может быть хорошо убран. В результате, требуется конструкция управления давлением, которая может обеспечить распределение давления, имеющее фиксированные или предварительно определенные пропорции, таким образом, устройство может перемещаться правильно и начисто очищать пол.
[0036] Как показано на фиг. 5, исходя из конструкции управления давлением согласно одному варианту осуществления настоящего изобретения, автоматическая машина 100 для уборки дополнительно содержит пружину 440. Пружина 440 размещена между перемещающим устройством и корпусом 320 автоматической машины 100 для уборки, таким образом, пружина 440 может толкать перемещающее устройство в направлении от автоматической машины 100 для уборки, то есть, пружина 440 прикладывает давление, направленное вниз, на перемещающее устройство. В частности, в этом варианте осуществления пружина 440 размещена между подвижными колесными модулями 400 и основанием 310, таким образом, она прикладывает давление, направленное вниз, на подвижные колесные модули 400. Соответственно, может быть заложено постоянное или предварительно определенное давление посредством выбора коэффициента жесткости пружины 440, чтобы распределять давление, приложенное к гусеничной ленте 420 и протирочным тканям 230 и 260. Конструкция управления давлением для гусеничного колеса будет описана подробно ниже. Кожух 402 перемещающего устройства содержит втулку 401, которая расположена на одном конце кожуха 402. Корпус 320 дополнительно содержит фиксирующий стержень 443, кольцевой стопор 441 и фиксирующий винт 442. Втулка 401 размещена на выступающем конце кожуха 402 подвижного колесного модуля 400. Обратимся снова к фиг. 5. Фиксирующий стержень 443 размещен на основании 310 и выступает от основания 310, и втулка 401 вставлена на внешней кольцевой поверхности фиксирующего стержня 443. Кольцевой стопор 441 размещен в верхней части фиксирующего стержня 443. Фиксирующий винт 442 ввинчен в фиксирующий стержень 443, таким образом, кольцевой стопор 441 прикреплен в верхней части фиксирующего стержня 443.
[0037] Верхний конец пружины 440 упирается торцом в кольцевой стопор 441. Нижний конец пружины 440 упирается концом в часть кожуха 402 перемещающего устройства. В частности, как показано на фиг. 5, он упирается торцом в нижнюю сторону втулки 401 кожуха 402. Таким образом, пружина 440 может прикладывать давление, направленное вниз, на подвижные колесные модули 400. В одном варианте осуществления, нет пружины для прикладывания давления, направленного вниз, на устройство для уборки, таким образом, передняя и задняя пластины 220 и 250 щетки устройства для уборки могут плавно осуществлять линейное возвратно-поступательное движение.
[0038] Рассмотрим распылительное устройство. В соответствии с известным уровнем техники, так как робот выполняет сухую уборку пола, он не может эффективно убирать следы от пятен воды, отпечатки следов и мелкие частицы. Согласно одному варианту осуществления настоящего изобретения автоматическая машина 100 для уборки дополнительно содержит распылительное устройство, применяемое для распыления воды, таким образом, следы от пятен могут быть легко убраны. Как показано на фиг. 1 и 6, распылительное устройство содержит емкость 700 для воды, трубку 710 для воды, насос 720 для воды, трубку 730 для воды, левую форсунку 740 и правую форсунку 750. Как показано на фиг. 9, система 500 управления может управлять насосом 720 для воды для прикладывания давления к воде. Как показано на фиг. 1, вода для уборки, хранящаяся в емкости 700 для воды, проходит через трубку 710 для воды и затем достигает насоса 720 для воды. Как показано на фиг. 1 и 6, вода для уборки накачивается насосом 720 для воды, и затем левая форсунка 740 и правая форсунка 750, показанные на фиг. 6, выпускают воду, после вода проходит через трубку 730 для воды. Ссылочная позиция 741 обозначает диапазон распыления левой форсунки 740, и ссылочная позиция 751 обозначает диапазон распыления правой форсунки 750. Система 500 управления управляет насосом 720 для воды на основе скорости перемещения машины для определения времени распыления и количества воды, так чтобы протирочные ткани 230 и 260 не были слишком влажными или слишком сухими. Соответственно, автоматическая машина 100 для уборки из-за этого может иметь лучший эффект уборки.
[0039] Рассмотрим систему управления. На фиг. 9 показана функциональная блок-схема системы управления согласно одному варианту осуществления настоящего изобретения. Как показано на фиг. 9, система 500 управления содержит процессор 510 (CPU), запоминающее устройство 511 (RAM), флеш-память 512, устройство 520 широтноимпульсной модуляции (PWM), по меньшей мере один усилитель 521 мощности и приемник 910 дистанционного управления. Процессор 510, запоминающее устройство 511 и флеш-память 512 являются базовыми модулями для вычисления и хранения данных. Системное программное обеспечение хранится во флеш-памяти 512, и системное программное обеспечение управляет устройством 520 широтноимпульсной модуляции для вывода сигналов мощности на усилитель 521 мощности, тем самым приводя в действие электродвигатели 430, 110, 640 и 720, соответственно. Первый и второй электродвигатели 430 применяются для передвижения автоматической машины 100 для уборки. Электродвигатель 110 применяется для осуществления процесса возвратно-поступательной очистки двигающегося возвратно-поступательно очищающего механизма. Электродвигатель 640 вакуумного насоса применяется для всасывания воздуха, в то время как электродвигатель 640 насоса для воды применяется для распыления воды.
[0040] Как показано на фиг. 1, автоматическая машина 100 для уборки дополнительно содержит по меньшей мере передний бесконтактный датчик 810 приближения, который размещен на переднем конце автоматической машины 100 для уборки и выполнен с возможностью обнаружения препятствия, находящегося впереди, для избежания удара о препятствие, находящееся впереди. Как показано на фиг. 2, автоматическая машина 100 для уборки дополнительно содержит по меньшей мере нижний бесконтактный датчик 820 приближения, который размещен на нижней стороне корпуса 320, предпочтительно, размещен на нижней поверхности корпуса 320. Нижний бесконтактный датчик 820 приближения может определять, есть ли впереди автоматической машины 100 для уборки ступенька, чтобы защищать автоматическую машину 100 для уборки от переворачивания. Бесконтактные датчики 810 и 820 приближения могут представлять собой инфракрасный датчик, лазерный датчик измерения расстояния или ультразвуковой датчик и другие датчики, доступные в настоящее время или разработанные в будущем.
[0041] Как показано на фиг. 5, в одном варианте осуществления автоматическая машина 100 для уборки дополнительно содержит буфер 330 и ограничительный выключатель 830. буфер 330 может быть выполнен спереди автоматической машины 100 для уборки. Когда буфер 330 наталкивается на препятствие и затем нажимает ограничительный выключатель 830, микрокомпьютер или процессор 510 знает, что препятствие обнаружено, и выполняет другие соответствующие операции или движения.
[0042] В одном варианте осуществления автоматическая машина 100 для уборки дополнительно содержит датчик 840 измерения расстояния. Соответственно, она может иметь функцию применения лазера для измерения расстояния между ней и препятствием или расстояния между ней и окружающей средой для составления карты для планирования маршрута уборки.
[0043] Программа, встроенная в процессор 510 системы 500 управления, может автоматически управлять всеми электродвигателями, выполнять обнаружение препятствий или планировать маршрут уборки для уборки всей комнаты.
[0044] Система 500 управления содержит приемник 910 дистанционного управления и передатчик 900 дистанционного управления, которые могут передавать сигналы посредством применения беспроводной технологии, такой как инфракрасное излучение (IR) или WIFI, или могут быть другими приемниками и передатчиками, доступными в настоящее время или разработанными в будущем.
[0045] На фиг. 7 показан вид в сечении по линии сечения, соответствующей линии A-A на фиг. 2, в автоматической машине для уборки согласно одному варианту осуществления настоящего изобретения. Вариант осуществления по фиг. 7 подобен варианту осуществления по фиг. 2 и 3, и, тем самым, элементы на фиг. 7, имеющие те же функции, что и элементы на фиг. 2 и 3, обозначены теми же ссылочными позициями, и излишние объяснения опущены в настоящем документе. Различия будут описаны ниже. Линия сечения A1-A1 на фиг. 7 соответствует линии сечения A-A на фиг. 2. Как показано на фиг. 7, фиксированным входным отверстием 619 замещено подвижное входное отверстие 611 передней пластины 220 щетки. Электрическая щетка 690 вблизи фиксированного входного отверстия 619 прикреплена к основанию 310. Круглый корпус электрической щетки 690 имеет спиральные щетинки 910, которые расположены вблизи фиксированного входного отверстия 619. Электрическая щетка 690 может убирать пол. Пыль, волосы и мусор, сметенные щетинками 910, всасываются в фиксированное входное отверстие 619 потоком 20a воздуха и затем достигают пылесборника 600. Соответственно, эффективность уборки автоматической машины 100 для уборки может быть увеличена.
[0046] Следует понимать, что изобретение не ограничено в форме автоматической машины 100 для уборки. На фиг. 10 показан вид сверху автоматической машины для уборки согласно другому варианту осуществления настоящего изобретения. Вариант осуществления согласно фиг. 10 подобен варианту осуществления по фиг. 1, и, таким образом, элементы на фиг. 10, имеющие те же функции, что и элементы на фиг. 1, обозначены теми же ссылочными позициями, и излишние объяснения опущены в настоящем документе. Различия будут описаны ниже. Как показано на фиг. 10, форма автоматической машины 100 для уборки является круглой. В одном варианте осуществления ее форма может быть треугольной (не показана).
[0047] Согласно одному варианту осуществления настоящего изобретения автоматическая машина 100 для уборки содержит высокоскоростной возвратно-поступательно очищающий механизм. Частота очистки протирочной ткани 230 может составлять более, чем 200 раз в минуту, таким образом, может быть получена высокоэффективная машина для уборки. В одном варианте осуществления автоматическая машина 100 для уборки содержит вакуумное устройство, которое выполнено с возможность всасывания пыли и грязи, накопленных спереди протирочной ткани 230. В одном варианте осуществления автоматическая машина 100 для уборки содержит распылительное устройство. Распылительное устройство правильно распыляет воду для сохранения протирочной ткани 230 оптимально увлажненной, таким образом, может быть достигнут лучший эффект уборки. Согласно одному варианту осуществления настоящего изобретения автоматическая машина 100 для уборки содержит все из вышеупомянутых устройств и реализована с помощью программы искусственного интеллекта для обеспечения возможности машине убрать пол всей комнаты.
[0048] Эти и другие варианты осуществления настоящего изобретения также становятся очевидными для специалистов в данной области техники из вышеприведенного подробного описания предпочтительных вариантов осуществления со ссылками на прилагаемые фигуры; однако изобретение не ограничено каким-либо конкретным вариантом (вариантами) осуществления, раскрытым в данном документе. Эти и другие модификации настоящего изобретения, которые были бы очевидны специалистам в данной области техники, включены в объем настоящего изобретения и пункты нижеследующей формулы изобретения.
Реферат
Автоматическая машина для уборки содержит высокоскоростное, двигающееся возвратно-поступательно очищающее устройство, обеспечивающее возможность протирочной ткани возвратно-поступательно очищать пол на высокой скорости, и вакуумное устройство, всасывающее пыль перед протирочной тканью. 2 н. и 16 з.п. ф-лы, 10 ил.
Комментарии