Колесо фортуны с управлением на основе жестов - RU2629471C2
Код документа: RU2629471C2
Чертежи




Описание
Настоящее изобретение относится к способу управления колесом фортуны в соответствии с преамбулой пункта 1 формулы изобретения и к колесу фортуны, выполненному в соответствии с преамбулой пункта 9 формулы изобретения.
В приведенном ниже тексте употребляемые термины "установление", "определение" и т.д. постоянно следует понимать как "установление", "определение" и т.д. переменной при заранее определенных равных или неравных промежутках времени. Если переменная, например положение кисти руки, угол поворота, скорость поворота и т.д., устанавливается непрерывно, эта переменная устанавливается с равными промежутками времени, например десять (10) раз в секунду, или с заранее определенными неравными промежутками времени. Таким образом, непрерывное определение переменной может также подразумевать адаптацию установления или определения переменной. Непрерывное установление также может также подразумевать, что в случае больших изменений во времени, которые превышают пороговое значение определяемой переменной, соответствующий промежуток времени между двумя измерениями соответствующим образом уменьшается.
Колесо фортуны следует понимать как устройство, которое приводится в движение пользователем путем сообщения движения поворота и которое в дальнейшем свободно вращается вокруг оси с определенной величиной трения. Под влиянием этого трения и в некоторых случаях из-за наличия дополнительного средства торможения происходит замедление колеса фортуны. На окружности колеса фортуны предусмотрены различные символы, и эти символы имеют определенное значение для дальнейшей игры, например выигрыш определенной суммы денег, проведение дальнейшей призовой игры, проигрыш, определенные преимущества в следующей игре и т.д. В результате поворота пользователем колеса фортуны положение поворота колеса корректируется, при этом пользователь не в состоянии точно определить конкретное конечное положение колеса фортуны; из-за этого получаемый результат носит в некоторой степени случайный характер. В зависимости от положения, в котором останавливается колесо фортуны, с помощью индикатора устанавливаются различные символы, и они оказывают влияние на дальнейший ход игры, как упомянуто выше. Управление колесом фортуны может осуществляться посредством реального (механического) колеса, устанавливаемого с возможностью вращения вокруг оси, и на этом колесе соответствующим образом отпечатаны специальные символы. Однако управление колесом фортуны может осуществляться также и виртуально, то есть колесо и его движение и то, что на нем отпечатано, отображаются на мониторе, управляемом компьютером. В случае использования виртуальных колес фортуны, поворот пользователем, в частности, вызывает проблемы, связанные с тем, что объем влияния пользователя на процессы, происходящие в компьютере, в частности, на имитационное моделирование поворота, ограничен определенными устройствами ввода данных. В данной заявке при упоминании колеса фортуны имеется в виду, что это может быть как виртуальное, так и механическое колесо фортуны.
В известном уровне техники раскрыты различные устройства приведения в действие, которые основываются на жестах и действуют бесконтактно. Так, например, в US 2004166937 A1 раскрыто игровое устройство с распознаванием жестов пользователя, в котором датчиком, входящим во взаимодействие с пользователем, может быть, например, камера, которая сканирует движения кисти руки пользователя и сравнивает их с большим количеством движений, хранящимся в базе данных. В зависимости от результатов сравнения и от того, насколько соответствует записанный жест тем жестам, которые хранятся в базе данных, выполняется действие, назначенное соответствующему жесту. Существенный недостаток этого способа заключается в том, что он предусматривает проведение очень сложного, трудновыполнимого анализа графических данных. Такой способ всегда ограничивается конкретным отдельным устройством и конкретным пользователем и не подходит для применения в отношении большого количества разных пользователей. Целью изобретения является разработка интуитивного устройства, а именно колеса фортуны, которое может приводиться в действие большинством людей, и способа управления этим колесом фортуны.
В частности, предусматривается исключение необходимости в распознавании большого количества разных жестов и разработка способа обнаружения, в равной степени подходящего для всех пользователей.
В качестве примера, поворот поворачивающегося колеса (фортуны) промышленно применим как дополнительная игра в основной игре или во время основной игры в игровом автомате. Дополнительная игра, которая включает поворот поворачивающегося колеса (фортуны), может быть запущена заранее определенным событием (например, появлением размещенных вразброс символов) в основной игре.
Согласно настоящему изобретению предлагается способ управления колесом фортуны пользователем,
- в котором применяют камеру для установления положения центра масс тела и кисти руки пользователя,
- в котором порог высоты устанавливают на заранее определенное значение относительно центра масс тела и в котором, когда положение кисти руки превышает порог высоты, начинают фазу поворота, в течение которой непрерывно устанавливают положение кисти руки,
- в котором непрерывно устанавливают поворот, осуществляемый движением кисти руки пользователя, и устанавливают угол поворота,
- в котором непрерывно определяют угловую скорость, которая представляет собой степень изменения установленного угла с течением времени,
- в котором завершают фазу поворота и определяют угловую скорость, определяемую непрерывно, предпочтительно непосредственно перед окончанием фазы поворота, как начальную скорость поворота и
- в котором после окончания фазы поворота начинают фазу свободного вращения, причем дальнейший поворот колеса фортуны выполняют с начальной скоростью поворота как начальной скоростью, и колесо фортуны непрерывно замедляют и останавливают в определенном конечном положении, и это конечное положение поддерживают.
В данном случае предпочтительно, чтобы ряд пользователей в расчете на одну систему, которые, в частности, стоят у множества игровых устройств, расположенных рядом друг с другом, имел возможность поворачивать колесо фортуны и таким образом имел возможность оказывать влияние на дальнейший ход игры. Основанные на жестах взаимодействия с игровым устройством разрешаются для каждого пользователя, находящегося в зоне регистрации камеры.
Дополнительное преимущество настоящего изобретения состоит в обеспечении возможности взаимодействия для пользователя, которое кажется естественным, при этом колесом фортуны можно манипулировать без физического контакта с колесом фортуны.
Для того чтобы распознать окончание фазы поворота, может быть предусмотрено задание дополнительного порога высоты, установленного на заранее определенное значение, в частности на заранее определенное значение ниже центра масс тела, и может быть предусмотрено завершение фазы поворота и начало фазы свободного вращения тогда, когда положение кисти руки опускается ниже дополнительного порога высоты.
Альтернативно или дополнительно, для того, чтобы распознать окончание фазы поворота, может быть предусмотрено завершение фазы поворота и начало фазы свободного вращения тогда, когда угол, охватываемый колесом фортуны, по отношению к начальному положению в течение фазы поворота превышает заранее определенное пороговое значение и/или когда угловая скорость превышает заранее определенное пороговое значение. Альтернативно или дополнительно, для того, чтобы распознать окончание фазы поворота, может быть предусмотрено завершение фазы поворота тогда, когда достигнут или превышен заранее определенный порог времени, например, измеренный с момента времени превышения верхнего порога высоты.
Предпочтительное определение угла поворота может быть обеспечено посредством периодического установления угла поворота во времени как угла между прямой линией, проходящей через центр масс тела и положение кисти руки, и заранее определенной, в частности перпендикулярной, опорной прямой линией.
Альтернативное определение угла поворота может быть обеспечено в начале фазы поворота посредством задания угла поворота, равного начальному углу αstart=α_0, и в течение фазы поворота посредством непрерывного установления положения (hp_n) кисти руки пользователя в заранее определенные моменты времени tn:
hp_n=[hp_n_X, hp_n_Y, hp_n_Z],
и для каждого момента времени в течение фазы поворота выполняют следующие вычисления:
βn=atan2(hp_n_Y-hp_n+1_Y, hp_n+1_X-hp_n_X),
dn=√((hp_n+1_X-hp_n_X)2+(hp_n+1_Y-hp_n_Y)2),
Δβn=βn-α_n,
fexp_n=f(Δβn),
Δαn=d0*fexp_n*fsensitivity,
αn=αn-1+Δαn,
где αn - угол поворота колеса фортуны в момент времени tn, и где предпочтительно f - синусоидальная функция, и где fsensitivity имеет значение от 0 до 1, в частности от 0,1 до 0,4.
Этим обеспечивается возможность установления угла поворота, и при этом непрерывное установление центра масс тела пользователя не требуется.
Для проведения различия между поворотами колеса фортуны кистью правой руки и кистью левой руки может быть предусмотрено, что положение кисти руки в момент превышения порога высоты сравнивается с положением центра масс пользователя относительно координатного направления, проходящего горизонтально и по нормали к плоскости колеса фортуны, и в зависимости от результата этого сравнения задается вращение колеса фортуны в направлении по часовой стрелке или в направлении против часовой стрелки.
Для обеспечения отслеживания поворота колеса фортуны путем его отображения в графическом виде может быть предусмотрен показ изображения колеса фортуны при соответствующем угле его поворота на мониторе в течение фазы поворота и/или в течение фазы свободного вращения и обновление этого изображения с заранее определенными промежутками времени так, что на мониторе воспринимается поворотное движение колеса фортуны.
Особенно предпочтительное установление положения пользователя может быть обеспечено посредством установления положения центра масс тела и кисти руки пользователя с помощью 3D-камеры или инфракрасной камеры с датчиками глубины, при этом соответствующим образом устанавливают информацию о расстоянии до камеры для ряда пикселей соответствующей камеры.
Во избежание регистрации артефактов, которые обусловлены движениями разных пользователей, может быть предусмотрено, что для установления поворотного движения колеса фортуны из тех пользователей, которые находятся в зоне регистрации камеры, используют только того пользователя, который находится ближе всех к камере.
Кроме того, настоящее изобретение относится к системе, в состав которой входят дисплей с монитором для показа изображения колеса фортуны и устройство сбора данных с камерой для регистрации поворота пользователем колеса фортуны,
- где дисплей показывает изображение колеса фортуны в заранее определенные моменты времени с заранее определенным углом поворота,
- где устройство сбора данных после активации устанавливает положение кисти руки и центра масс тела пользователя, находящегося в зоне регистрации камеры,
при этом к устройству сбора данных и дисплею подключено устройство управления,
- где устройство управления после активации может быть установлено в начальное состояние, в котором устройство управления приводит в действие устройство сбора данных для установления положений центра масс тела и для непрерывного установления положения кисти руки пользователя,
- где устройство управления выполняет функцию устройства сравнения для сравнения установленного положения кисти руки с заранее определенным порогом высоты и вызывает прекращение начального состояния и начало фазы поворота, когда положение кисти руки превышает порог высоты,
- где устройство управления непрерывно устанавливает положение кисти руки в течение фазы поворота и непрерывно устанавливает угол поворота, совершаемого движением кисти руки пользователя, при этом оно дополнительно непрерывно определяет угловую скорость, которая представляет собой степень изменения установленного угла с течением времени,
- где устройство управления вызывает окончание фазы поворота и устанавливает угловую скорость, установленную непосредственно перед окончанием фазы поворота, как начальную скорость поворота, и
- где устройство управления после окончания фазы поворота вызывает начало фазы свободного вращения, в течение которой дальнейший поворот колеса фортуны выполняется с начальной скоростью поворота, установленной таким образом, и колесо фортуны непрерывно замедляется и останавливается в определенном конечном положении, и устройство управления поддерживает это конечное положение.
Эта система позволяет очень простым путем определить возможное поворотное движение, выполняемое пользователем, и может применяться для большого количества разных пользователей. Имеется интуитивное устройство, которое может приводиться в действие большинством людей, а именно колесо фортуны, которое можно поворачивать без физического контакта.
Для того чтобы завершить фазу поворота, может быть предусмотрено установление дополнительного порога высоты на заранее определенное значение, в частности на заранее определенное значение ниже центра масс тела, и под действием устройства управления окончание фазы поворота и начало фазы свободного вращения, когда кисть руки опускается ниже дополнительного порога высоты.
Альтернативно или дополнительно, для окончания фазы поворота может быть предусмотрено, что под действием устройства управления будет заканчиваться фаза поворота и начинаться фаза свободного вращения тогда, когда угол поворота, охватываемый колесом фортуны, по отношению к начальному положению в течение фазы поворота превышает заранее определенное пороговое значение и/или когда угловая скорость превышает заранее определенное пороговое значение.
Предпочтительное определение угла поворота может быть обеспечено с помощью устройства управления, содержащего блок определения угла поворота, который устанавливает угол поворота периодически во времени как угол между прямой линией, проходящей через центр масс тела и положение кисти руки, и заранее определенной, в частности перпендикулярной, опорной прямой линией.
Альтернативное определение угла поворота может быть осуществлено с помощью устройства управления, содержащего блок определения угла поворота, который
- задает угол поворота, равный заранее определенному начальному углу αstart=α_0, в начале фазы поворота,
- устанавливает в течение фазы поворота положение (hp_n) кисти руки пользователя непрерывно в заранее определенные моменты tn:
hp_n=[hp_n_X, hp_n_Y, hp_n_X] и
выполняет следующие вычисления для каждого момента времени tn в течение фазы поворота:
βn=atan2(hp_n_Y-hp_n+1_Y, hp_n+1_X-hp_n_X),
dn=√((hp_n+1_X-hp_n_X)2+(hp_n+1_Y-hp_n_Y)2),
Δβn=βn-α_n,
fexp_n=f(Δβn),
Δαn=d0*fexp_n*fsensitivity,
αn=αn-1+Δαn,
где αn - угол поворота колеса фортуны в момент времени tn, и где предпочтительно f - синусоидальная функция, и где fsensitivity имеет значение от 0 до 1, в частности от 0,1 до 0,4.
Это позволяет установить угол поворота без необходимости непрерывного установления центра масс тела пользователя.
Для проведения различия между поворотами колеса фортуны кистью правой руки и кистью левой руки может быть предусмотрено наличие дополнительного блока сравнения, который сравнивает положение кисти руки в момент превышения порога высоты с положением центра масс пользователя относительно координатного направления, проходящего по нормали к плоскости колеса фортуны и горизонтально, и в зависимости от результата этого сравнения устанавливает, в каком направлении происходит вращение колеса фортуны: в направлении по часовой стрелке или же в направлении против часовой стрелки.
Для обеспечения отслеживания поворота колеса фортуны путем его отображения в графическом виде может быть предусмотрено, что дисплей показывает изображение колеса фортуны при соответствующем угле его поворота на мониторе в течение фазы поворота и/или в течение фазы свободного вращения и обновляет это изображение с заранее определенными промежутками времени так, что на мониторе может восприниматься поворотное движение колеса фортуны.
Особенно предпочтительное установление положения пользователя может быть обеспечено с помощью камеры, представляющей собой 3D-камеру или инфракрасную камеру с датчиками глубины, с помощью которой может быть соответствующим образом установлена информация о расстоянии до камеры для ряда пикселей.
Во избежание регистрации артефактов, которые обусловлены движениями разных пользователей, может быть предусмотрено наличие блока выбора, который для установления поворотного движения колеса фортуны выбирает из тех пользователей, которые находятся в зоне регистрации камеры, только того пользователя, который находится ближе всех к камере.
Два предпочтительных иллюстративных варианта осуществления настоящего изобретения и несколько типов этих иллюстративных вариантов осуществления более детально проиллюстрированы на следующих чертежах графических материалов.
На фигуре 1 показана система с колесом фортуны и четырьмя игровыми автоматами.
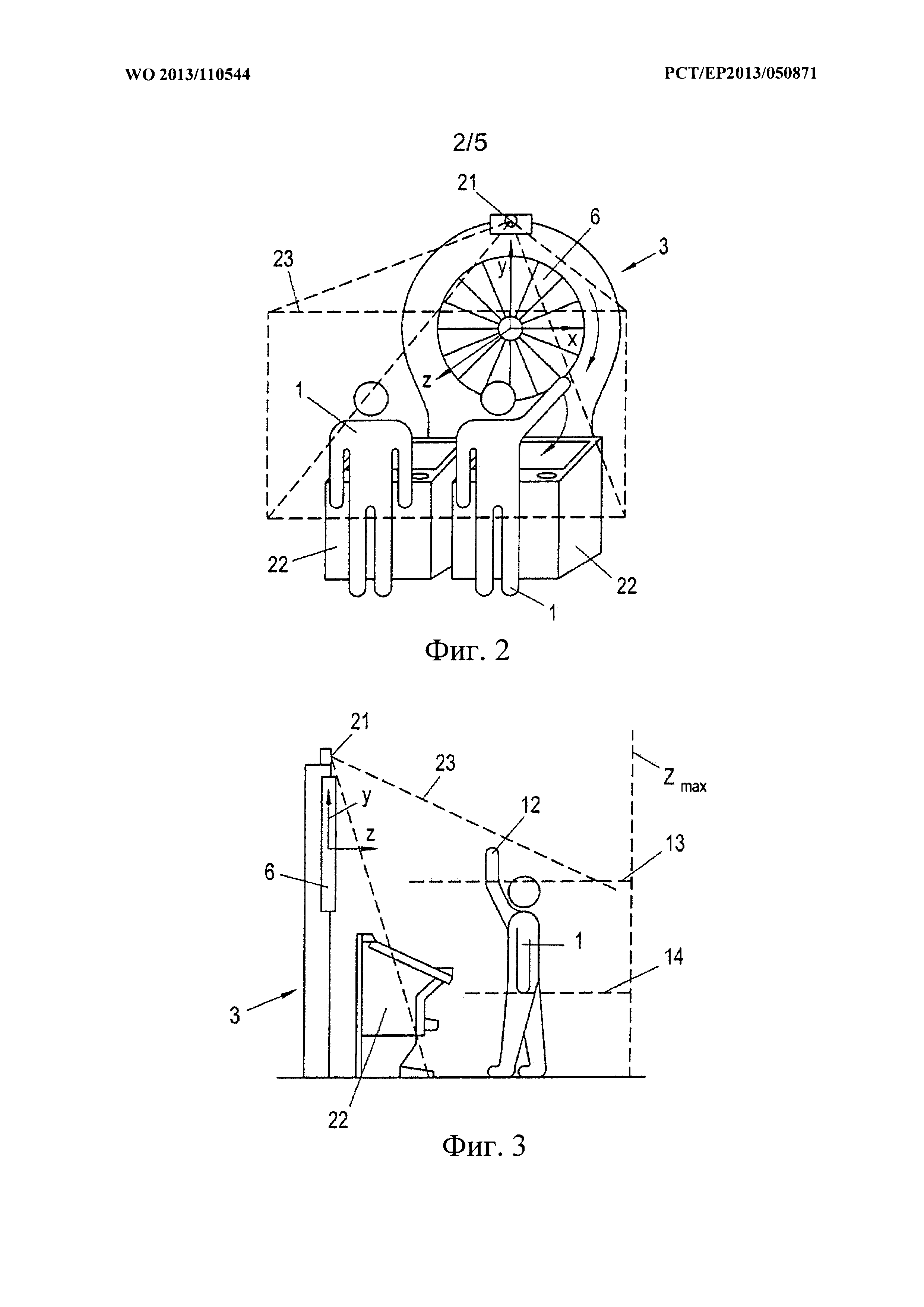
На фигуре 2 показана другая система с колесом фортуны и двумя игровыми автоматами в косой проекции.
На фигуре 3 показана система, изображенная на фигуре 2, в боковой проекции.
На фигуре 4 показана система, изображенная на фигуре 2, в косой проекции.
На фигуре 5 показан вариант осуществления, изображенный на фигуре 4, при наличии нескольких наблюдателей.
На фигуре 6 показана диаграмма состояний, включающая все состояния способа согласно настоящему изобретению.
На фигуре 7 показаны верхний и нижний пороги высоты и схематическое изображение двух человек в начале процесса поворота с поднятыми кистью правой руки и кистью левой руки соответственно.
На фигурах 8 и 9 схематически показано определение угла поворота В соответствии с первым предпочтительным вариантом осуществления настоящего изобретения.
На фигурах 10-13 схематически показано определение угла поворота В соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения.
На фигуре 14 подробно показан вариант осуществления последовательности операций, выполняемых в течение фазы поворота.
На фигуре 15 схематически показана передача данных в системе согласно настоящему изобретению.
На фигуре 1 схематически изображена система, содержащая дисплей 6 с виртуальным колесом фортуны 3. В состав системы входит инфракрасная камера 2, в частности камера с датчиками глубины, с двумя датчиками 21, причем эта камера назначена колесу фортуны 3.
В качестве примера, такая камера с датчиками глубины подробно описана в документе WO 2011/013079. Система визуализации камеры 2 проецирует на тело или по меньшей мере на часть тела пользователя 1 образ или изображение, каковые образ или изображение появляются на поверхности тела. В системе визуализации для облучения обычно используется инфракрасное излучение. Компьютер в системе визуализации камеры 2 обрабатывает изображения, зарегистрированные двумя датчиками 21, в результате чего получают информацию о глубине. Информация о глубине в каждом случае отображается в трехмерной системе координат, в которой значение в виде координаты Ζ или в виде пространственной координаты в каждом случае присваивается каждому пикселю изображения, регистрируемого датчиком. Компьютер в системе визуализации камеры 2 формирует точечную трехмерную модель тела пользователя 1, причем последовательность действий, описываемая этапами способа, описанного в публикациях WO 2007/043036, WO 2007/105205 и WO 2008/120217, следует принципу триангуляции отдельных точек. Камера 2 в каждом случае предоставляет информацию о глубине для каждого из пикселей, в частности в виде расстояния, отделяющего пользователя от камеры 2, измеренного вдоль линии видимости соответствующего пикселя.
Система дополнительно содержит четыре игровых автомата 22, на которых пользователи 1 могут играть в игры. Игры, в которые играют на игровых автоматах 22, могут иметь разное содержание. Если игра доходит до определенного состояния, например, выигрыша в игре, начинается игра в игре, в которой пользователю 1, играющему на этом игровом автомате 22, приходится поворачивать колесо фортуны 3. После поворота колеса фортуны 3 и в зависимости от получаемого в результате конечного положения колеса фортуны 3 игра может быть продолжена, может произойти выплата или же игра может быть завершена. Игра может быть особенно захватывающей в том случае, если пользователь 1, который выиграл игру, ведущуюся на игровом автомате 22, может повлиять на сумму выплаты по колесу фортуны 3 посредством его поворота.
Вместо виртуального (цифрового) колеса фортуны может также, альтернативно, приводиться в действие механическое колесо фортуны, при этом предпочтительной является соответствующая механическая легкая конструкция с колесом небольшой массы, чтобы можно было своевременно отслеживать даже быстрые движения кисти руки. При этом механическое колесо может приводиться в действие подходящим двигателем, например шаговым двигателем.
Колесо фортуны 3 содержит вышеупомянутую камеру 2 с двумя датчиками 21, причем эта камера создает трехмерное изображение сцены, находящейся в ее зоне регистрации 23. Если колесо фортуны 3 активировано, изображения сцены, находящейся в зоне регистрации 23, создаются непрерывно; в данном конкретном иллюстративном варианте осуществления создается десять сцен в секунду, то есть в каждой секунде заранее определены десять моментов времени регистрации, для которых создается изображение сцены. В ходе данного процесса выявляют как центр масс 11 соответствующих пользователей 1, так и положение кисти руки 12 соответствующего пользователя 1. Поэтому в каждый момент времени регистрации центр масс и положение кисти руки пользователя 1 представляются в виде трехмерной системы координат.
В рассматриваемом иллюстративном варианте осуществления ориентация координат выбрана таким образом, что начало координат находится в точке поворота колеса фортуны 3 (фигуры 2, 3). Ось Ζ расположена по нормали к плоскости колеса фортуны 3, ось X проходит горизонтально относительно уровня пола, а ось Υ проходит вертикально относительно уровня пола. В принципе может быть задана любая другая ориентация камеры 2, если все координаты преобразуются в вышеуказанную систему координат посредством преобразования координат.
Дополнительно, в отношении системы координат следует отметить, что верхний порог высоты 13 и нижний порог высоты 14 определены заранее. В рассматриваемом иллюстративном варианте осуществления верхний порог высоты 13 определен заранее в абсолютном выражении и находится приблизительно на два метра выше уровня пола. Альтернативно, верхний порог высоты может быть соотнесен с координатой Υ центра масс 11 пользователя 1 и может быть задан на уровне, находящемся приблизительно на 60-80 см выше координаты Υ центра масс 11 соответствующего пользователя 1. Аналогично верхнему порогу высоты 13, нижний порог высоты 14 может быть задан либо путем указания абсолютного значения относительно уровня пола, приблизительно на 1 м выше уровня пола, либо путем указания значения, связанного с координатой Υ центра масс 11 соответствующего пользователя 1. Таким образом, например, в качестве нижнего порога высоты 14 может быть задано значение в пределах от 40 до 60 см ниже центра масс пользователя 1.
В данном варианте осуществления настоящего изобретения поворот колеса фортуны 3 представляет собой игру в игре на игровом автомате. Как только игра на игровом автомате на одном из игровых автоматов 22 доходит до состояния игры, требующего проведения игры в игре, активируется игра в игре, причем для игры в игре задается начальное состояние A (фигура 6). Начальное состояние необходимо пользователю 1 для того, чтобы приготовиться к повороту колеса фортуны и установить свою кисть руки 12 в положение, в котором он может поворачивать колесо фортуны 3. Ввиду того, что в данном конкретном варианте осуществления настоящего изобретения колесо фортуны 3 поворачивается сверху вниз, пользователь 1 должен поднять свою кисть руки выше предварительно заданного верхнего порога высоты 13 перед тем, как повернуть колесо фортуны 3.
Для того чтобы обнаружить поднятие кисти руки 12, положение кисти руки непрерывно контролируется и уточняется, и координата Υ положения кисти руки сравнивается с верхним порогом высоты 13 (фигура 7). Как только координата Υ положения кисти руки превысит верхний порог высоты 13, будет считаться, что жест поднятия кисти руки завершился. Игра переходит из начального состояния A в фазу поворота B.
В течение фазы поворота B пользователь 1 перемещает свою кисть руки 12 сверху вниз, при этом определяется ω - скорость поворота, осуществляемого его кистью руки 12. Пользователь 1 следующим шагом совершает кистью руки 12 и остальной частью своей руки полукружное движение в направлении вниз.
В течение фазы поворота B положение колеса фортуны 3 непосредственно связано с положением кисти руки 12. При этом пользователю 1 должно передаваться ощущение, что он может непосредственно касаться колеса фортуны 3. Движения кисти руки 12 пользователя 1 должны непосредственно вызывать движения колеса фортуны 3. С этой целью непрерывно продолжается установление положения центра масс 11 пользователя 1 и положения кисти руки 12 пользователя 1. Положение кисти руки 12 пользователя 1 задается координатами hand_X, hand_Y и hand_Z относительно вышеупомянутой системы координат, и положение центра масс аналогично задается координатами com_X, com_Y и com_Z. Угол поворота α, который далее используется для поворота колеса фортуны 3, вычисляется с помощью следующего уравнения:
α=atan2(hand_Y-com_Y, com_X-hand, X).
Угол поворота α представляет собой угол между прямой линией 15, проходящей через центр масс тела 11 и положение кисти руки 12, и заранее определенной перпендикулярной опорной линией 16, проходящей через центр масс тела (фигуры 8, 9).
Если угол поворота α в промежутке между двумя моментами времени регистрации изменяется на заранее определенное значение Δα, то угол поворота α колеса фортуны 3 тоже изменяется на такое же значение Δα. Поэтому пользователь 1 может непосредственно влиять на угол поворота α колеса фортуны движением своей кисти руки 12. В связи с этим для дальнейших изменений положения кисти руки 12 и поворотного движения колеса фортуны 3, по существу, устанавливается корреляция без временных задержек так, что пользователю 1 передается ощущение непосредственного соединения колеса фортуны 3 с его кистью руки 12.
Изменение Δα угла поворота α может быть установлено как разность между углом поворота α в заранее определенный момент времени регистрации tn и углом поворота αn-1 в непосредственно предшествующий момент времени регистрации tn-1. Из этого следует, что
Δα=αn-αn-1.
Если разность Δα между двумя моментами времени регистрации известна, скорость поворота ω может быть вычислена следующим образом:
ω=Δα/Δt=Δα/(tn-tn-1)=Δα*fps,
где fps соответствует количеству расположенных с равными промежутками моментов времени регистрации на единицу времени. Эта скорость ω определяется непрерывно до тех пор, пока положение кисти руки 12 не будет располагаться ниже нижнего порога высоты 14.
Положение кисти руки 12 и скорость поворота ω устанавливаются непрерывно в пределах размаха поворота, совершаемого пользователем 1. Если положение кисти руки 12 опускается ниже нижнего порога высоты 14, установление скорости поворота ω завершается, и последнее установленное значение скорости ωe используется как начальная скорость для фазы свободного вращения C колеса фортуны (фигура 6). Фаза поворота B завершается; начинается фаза свободного вращения C.
Движение реального колеса фортуны 3, при котором пользователь 1 более не имеет возможности вмешательства во вращение колеса фортуны 3, моделируется в течение фазы свободного вращения C. Колесо фортуны 3, можно сказать, предоставлено само себе и независимым образом устанавливается в состояние покоя вследствие присущего ему трения.
Для моделирования поворота колеса фортуны 3 в течение фазы свободного вращения C угол поворота колеса фортуны 3 увеличивается на определенное значение с периодическими промежутками времени, то есть угол поворота α колеса фортуны 3 увеличивается в единицу времени на заранее определенное значение, которое зависит от скорости поворота ω, причем скорость поворота ω непрерывно уменьшается (то есть "тормозится") до тех пор, пока колесо фортуны 3 не остановится. Фаза свободного вращения C завершается остановкой колеса фортуны 3. И, наконец, результат поворота можно установить исходя из угла поворота α в то время, когда происходит остановка колеса фортуны 3.
Как следствие этого результата, можно, например, выплачивать неодинаковые по величине выигрыши, соответствующие результатам поворота; однако можно также задать разные начальные состояния в следующей игре, то есть следующая игра может быть выиграна пользователем 1 с большей или меньшей легкостью.
Если в зоне регистрации камеры 2 находится множество пользователей 1 и наблюдателей 1ʹ (фигура 5), проблем с регистрацией можно избежать в конкретном варианте настоящего изобретения за счет лишь того, что центр масс 11 и положение кисти руки 12 определяют для тех пользователей 1, которые распознаются как находящиеся ближе всех к камере 2 в пределах зоны регистрации камеры 2, то есть центр масс 11 и положение кисти руки 12 которых в рассматриваемом варианте осуществления имеют наименьшее значение координаты Ζ.
Альтернативно, можно также устанавливать положения кисти руки и центра масс всех пользователей 1, которые находятся в пределах определенной зоны, в частности тех из них, для которых значения координаты Ζ находятся ниже заранее определенного порога расстояния Zmax (фигура 3).
Вместо вышеуказанной процедуры определения угловой скорости ω в течение фазы поворота B, осуществляемой пользователем 1, в дополнительном предпочтительном варианте осуществления показана процедура, которая является независимой от центра масс 11 пользователя 1 и далее в тексте упоминается как определение скорости поворота на основе векторов. Этот предпочтительный вариант осуществления не отличается от вышеупомянутого первого варианта осуществления настоящего изобретения в начальном состоянии A и в течение фазы свободного вращения C.
В этом конкретном варианте осуществления настоящего изобретения в течение фазы поворота B для того, чтобы установить поворотное движение, непрерывно выявляется только положение кисти руки 12, а не положение центра масс тела 11 пользователя 1. Положение центра масс тела 11 пользователя 1 устанавливается всего лишь один раз, как раз в начале фазы поворота B, и нет необходимости устанавливать его снова на более поздней стадии. В частности, у пользователя 1 нет необходимости поворачивать кисть руки 12 вокруг центра масс 11 своего тела; вместо этого, для поворота колеса фортуны 3 может быть использовано любое кругообразное движение кисти руки. Как и в первом иллюстративном варианте осуществления настоящего изобретения, положение кисти руки 12 пользователя 1 непрерывно устанавливается в заранее определенные моменты времени tn.
На первом этапе в фазе поворота B один раз устанавливаются положение центра масс тела и положение кисти руки. Значения координаты X положения центра масс тела 11 и положения кисти руки 12 сравниваются так, что становится возможным установить, кистью какой руки пользователя вызывается вращение: правой руки или же левой руки.
После того как установлено, с какой стороны от центра масс тела 11 находится кисть руки 12, ей назначается начальный угол поворота α0=αstart. В тексте, приведенном ниже, сделано допущение, что положение, занимаемое кистью руки 12, является самым высоким тогда, когда оно превышает верхний порог высоты 13.
Для последующего вычисления альтернативный способ уже не требует информации о положении центра масс тела 11 пользователя 1, для его реализации используется лишь информация об отдельных положениях кисти руки 12 пользователя 1, зарегистрированных в последовательные моменты времени. Положения кисти руки, зарегистрированные в последовательном порядке, в каждом случае используются для определения угла поворота α, причем в этой процедуре пытаются не учитывать движения кисти руки 12, которые не относятся к вращательному движению, например движения по направлению к колесу фортуны 3, то есть в направлении Z, или движения с радиальной ориентацией относительно колеса фортуны 3, то есть в направлении к центру или от центра колеса фортуны 3, и использовать только те движения, которые происходят в направлении вдоль окружности колеса фортуны 3.
В рассматриваемом иллюстративном варианте осуществления сделано допущение, что кисть правой руки 12 в начальном положении находится под начальным углом αstart=30°. При этом колесо фортуны 3 ориентировано таким образом, что в самой высокой точке колеса фортуны 3 угол равен 0°, а в самой низкой точке колеса фортуны 3 угол равен 180°.
Пользователь 1 выполняет кистью руки кругообразное движение, начинающееся с движения вниз и вправо, при этом кисть руки 12 в различные моменты времени последовательно занимает различные положения hp_0, hp_1, …. Координаты отдельных положений кисти руки 12 пользователя 1 в каждом случае обозначаются следующим образом:
hp_0=[hp_0_X, hp_0_Y, hp_0_Z],
hp_1=[hp_1_X, hp_1_Y, hp_1_Z],
hp_2=[hp_2_X, hp_2_Y, hp_2_Z],
…
Положения hp_0 и hp_1 кисти руки в каждом случае устанавливаются в два момента времени t0 и t1, регистрируемые в последовательном порядке. В таком случае координаты положения кисти руки hp_0 в момент времени t0 и hp_1 в момент времени t1 доступны в момент времени t1. Исходя из этих двух значений, определяют две переменные β0 и d0 по следующим формулам (фигура 5):
β0=atan2(hp_0_Y-hp_1_Y, hp_1_X-hp_0_X)=95°,
d0=V((hp_1_X-hp_0_X)2+(hp_1_Y-hp_0_Y)2).
Для общего момента времени tn их значения могут быть вычислены следующим образом:
βn=atan2(hp_n_Y-hp_n+1_Y, hp_n+1_X-hp_n_X),
dn=√((hp_n+1_X-hp_n_X)2+(hp_n+1_Y-hp_n_Y)2).
Здесь расстояние d0 соответствует расстоянию между положениями кисти руки в моменты времени t0 и t1. На фигуре 11 показано положение кисти руки hp_0 при начальном угле α_0=αstan=30°. Показано также то, что движение в направлении, соответствующем координатному направлению +A, непосредственно влияет на угол поворота α колеса фортуны 3, тогда как движение в сторону, противоположную этому координатному направлению, то есть в направлении -A, соответственно вызывает уменьшение угла поворота α. Движение в радиальном направлении, то есть в направлении внутрь или наружу по отношению к колесу фортуны 3 вдоль координатного направления +R или -R, точно так же, как и небольшое движение в направлении от колеса фортуны 3 или же в направлении к нему, не оказывает влияния на изменение положения колеса фортуны 3.
Изменения положения, которые ориентированы не непосредственно вдоль одного из координатных направлений, а наклонно к ним под углом Δβ0, могут быть преобразованы в угловые расстояния в соответствии со следующими задаваемыми условиями (фигура 12):
Δβ0=β0-α_0=65°.
Этот угол Δβn определяется для всех моментов времени t1, …, tn и в общем случае задается выражением вида
Δβn=βn-α_n.
Теперь могут быть учтены перемещения положения кисти руки наклонно к соответствующим координатным направлениям R, A таким образом, что изменение Δα угла поворота α проявляются тем больше, чем большим является перемещение положения кисти руки в направлении, соответствующем координатному направлению A. С помощью интерполирующей функции f, показанной на фигуре 13, изменение Δα угла поворота α может быть приведено к следующему виду:
fexp=f(Δβn),
Δαn=d0*fexp*fsensitivity.
В рассматриваемом конкретном иллюстративном варианте осуществления интерполирующая функция f соответствует синусоидальной функции. Для поворота колеса фортуны в направлении против часовой стрелки интерполирующая функция соответствует f(α)=sin(α). В момент времени t=0 имеет место взвешивание с fexp=f(Δβn)=sin(65°) ~ 0,8.
Δαn=d0*sin(Δβn)*fsensitivity.
В рассматриваемом иллюстративном варианте осуществления разрешающая способность fsensitivity задана равной 0,3, но может изменяться в пределах от 0 до 1, в частности в пределах от 0,1 до 0,4, в зависимости от того, насколько сильно изменения положения кисти руки должны влиять на положение колеса фортуны. После того как изменение Δα угла поворота α задано, может быть установлен угол поворота для момента времени tn+1 исходя из угла поворота α, имеющего место в момент времени tn, для момента времени tn.
αn+1=αn+Δα.
Поэтому в первый временной шаг после начала фазы поворота получают следующий результат:
Δα=25*0,8*0,3=6°;
α1=30°+6°=36°.
Во избежание манипуляций с колесом фортуны 3 в обоих показанных вариантах осуществления настоящего изобретения для колеса фортуны, входящего в фазу свободного вращения, можно задать минимальную скорость (фигура 14). В случае, если скорость слишком мала, может быть произведен возврат к начальной фазе A, и снова будет ожидаться поднятие кисти руки 12. Как показано в предыдущем иллюстративном варианте осуществления, фаза поворота B может завершаться тогда, когда имеет место опускание ниже нижнего порога высоты 14. Однако, альтернативно, возможно также завершение фазы поворота B тогда, когда изменение угла поворота α превышает заранее определенное пороговое значение.
В еще одном дополнительном альтернативном варианте фаза поворота B может завершаться тогда, когда выполнено определенное изменение угла, то есть фаза поворота B завершается в момент времени t_n, в который α_n - α_0 превышает определенное пороговое значение.
Если положение кисти руки 12 пользователя 1 не может больше быть определено или установлено в течение фазы поворота B, вновь происходит возврат к начальной фазе A, и ведется поиск положения кисти руки 12. В еще одном дополнительном альтернативном варианте или дополнительно для распознавания окончания фазы поворота B предусмотрено, что фаза поворота B завершается тогда, когда достигается или превышается заранее определенное пороговое значение времени tSW, например, измеренное с момента времени превышения верхнего порога высоты 14. В описываемом в настоящий момент варианте осуществления описывается процесс поворота, при котором колесо фортуны 3 поворачивается в направлении вниз. Поэтому заранее определяется также верхний порог 13 высоты, превышение которого инициирует фазу поворота B. Альтернативно, может иметь место поворот в горизонтальной плоскости или снизу вверх. В этом случае задается порог в каждом случае в отношении соответствующего поворотного движения. В этом случае порог высоты следует понимать как границу зоны, при этом под действием кисти руки 12, отводимой от указанной границы зоны, запускается соответствующая фаза поворота B.
На фигуре 15 схематически показана система, содержащая камеру 2 с двумя датчиками 21. Сигналы, генерируемые двумя датчиками 21, передаются в устройство распознавания 4, которое после активации устанавливает положение кисти руки (12) и центра масс тела 11 пользователя 1, находящегося в зоне регистрации камеры 2. Эта активация вызывается устройством управления 5, подключенным к устройству распознавания 4. Устройство управления 5 подключено к независимым игровым автоматам 22 и, кроме того, приводит в действие дисплей 6, который показывает изображение колеса фортуны 3. В том случае, если предполагается начать игру в игре, которая включает поворот колеса фортуны 3 как составляющую часть игры, от соответствующего игрового автомата 22 в устройство управления 5 передается активирующий сигнал. Игровые автоматы 22 и устройство управления 5 подключены к одной и той же шине или включены в одну и ту же сеть.
После активации устройство управления 5 устанавливается в начальное состояние, в котором устройство управления 5 запускает и активирует устройство сбора данных 4 для установления положения центра масс тела 11 и для непрерывного установления положения кисти руки 12 пользователя 1. В данном предпочтительном варианте осуществления изобретения устройство управления 5 содержит блок сравнения, предназначенный для сравнения установленного положения кисти руки 12 с заранее определенным порогом высоты 13. Если положение кисти руки 12 превышает или проходит этот порог высоты 13, начальное состояние прекращается, и начинается фаза поворота B.
Упомянутые выше процессы и этапы способа в камере 2, в устройстве распознавания 4 и в устройстве управления 5 выполняются микрокомпьютером. В частности, с помощью устройства распознавания 4 также осуществляются сбор и обработка данных, передаваемых камерой 2, с регулированием таймером или посредством управления прерываниями.
Реферат
Настоящее изобретение относится к способу и системе для управления призовым колесом (3) пользователем (1). Согласно настоящему изобретению положение центра тяжести (11) и положение кисти руки (12) пользователя (1) устанавливают с использованием камеры (2); фиксируют заданное значение порога высоты (13) относительно центра тяжести (11); если положение кисти руки (12) превышает порог высоты (13), начинают фазу поворота, в течение указанной фазы поворота непрерывно устанавливают положение кисти руки (12); непрерывно устанавливают поворот, совершаемый движением кисти руки пользователя (1), и устанавливают угол поворота (α); непрерывно определяют угловую скорость (ω), т.е. степень изменения установленного угла (α) с течением времени; заканчивают фазу поворота, и угловую скорость (ω), которую непрерывно устанавливают предпочтительно непосредственно перед окончанием фазы поворота, фиксируют как начальную скорость поворота (ω); и после окончания фазы поворота начинают фазу свободного вращения. Колесо фортуны (3) далее поворачивают с начальной скоростью поворота (ω) как начальной скоростью, и призовое колесо (3) непрерывно тормозится и останавливается в заданном конечном положении, причем указанное конечное положение поддерживают. 2 н. и 14 з.п. ф-лы, 15 ил.
Комментарии