Изменение конфигурации формы элементов, выполненных с возможностью повторного использования - RU2680437C2
Код документа: RU2680437C2
Чертежи







Описание
Изобретение относится к системе элементов и элементам, которые могут являться частью системы элементов.
УРОВЕНЬ ТЕХНИКИ
С начала истории человечества, люди сооружают конструкции всевозможных типов. Для того чтобы сделать сооружение более легким, конструкция была разделена на элементы. Эти элементы были стандартизованы, чтобы сделать производство более легким. Примерами такой стандартизации служат, например для зданий, кирпичи для возведения домов, балки и кровельная черепица, и позднее бетонные части, такие как кровельные панели, окна, а также двери и другие части здания. Эта идея стандартизации частей также используется для других типов конструкций, таких как автомобили, компьютеры и, фактически, всех производимых в промышленных масштабах конструкций.
Проблемой большинства таких элементов является то, что они требуют манипуляций. Более того, элементы используются для определенной конструкции или определенного применения, например в игрушках. Более того, часто известные элементы не подлежат повторному использованию.
В «Групповые роботы с изменяемой конфигурацией, адаптивно изменяющие механическую структуру», Yousuke Suzuki, Norio Inou, Hitishi Kimura, Michihiko Koseki, Proc. of 2006 IEEE/RSJ, 9-15 октября 2006 года, Пекин, Китай, описаны «групповые роботы, адаптивно создающие механическую структуру». «Признаком роботов является высокая жесткость благодаря применению механизмов скольжения. При этом описанные алгоритмы ползущего движения и адаптивная конструкция считаются механическими ограничениями роботов. Предложенный алгоритм основан на локальной связи роботов. Здесь используется схема временного лидера, который автономно определен формой структуры. Схема уменьшает количество информация при связи между роботами.» Предложенный модуль движения обеспечивает только ограниченную подвижность предложенных роботов.
В «Конструкция робота ATRON на основе решеточной базы, выполнненого с возможностью самостоятельного изменения конфигурации», Esben Hallundbeak Oestergaard, Kristiaan Kassow, Richard Bek, Henrik Hautop Lund, Auton Робот (2006 21:165-183), описаны роботы с возможностью самостоятельного изменения конфигурации, и приведен обзор множества типов роботов, выполненных с возможностью самостоятельного изменения конфигурации. Показано, что возможно множество конфигураций.
«Эмерджентное управление роботами, выполненными с возможностью самостоятельного изменения конфигурации», Kasper Støy, Работа Maersk Mc-Kinney Moller Институт производственных технологий, Университет Южной Дании 6января 2004 года, обеспечивает обзор модульных роботов. Согласно этому автору, его работа относится к роботу, выполненному с возможностью самостоятельного изменения конфигурации, который является роботом, выполненным из потенциально множества модулей, которые соединены, чтобы образовать робота. Каждый модуль имеет датчики, приводы, вычислительные возможности и средство связи с присоединенными модулями. Робот автономно изменяет форму путем изменения образа, которым эти модули соединены. Работа дополнительно описывает, как в ней называется ролевое управление, которое является способом, используемым для внедрения походок передвижения в цепных роботах, выполненных с возможностью самостоятельного изменения конфигурации, и способ управления процессом самостоятельного изменения конфигурации. Этот способ состоит из двух компонентов. Первый компонент использует модель САПР требуемой формы и создает автоматические правила для клеток, которые устраняют глобальный аспект из проблемы самостоятельного изменения конфигурации. Второй компонент использует эти правила и объединяет их с искусственными химическими градиентами, чтобы образовать систему управления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает элемент, который обеспечивает гибкое использование. В частности, изобретение стремится обеспечить элемент, который позволяет создавать конструкцию, состоящую из аналогичных элементов.
Изобретение обеспечивает систему, содержащую по меньшей мере первый, второй и третий элемент, и модуль движения, причем упомянутые элементы являются трехмерными и каждый элемент содержит центральную точку в упомянутом элементе, по меньшей мере одну грань, соединенную с упомянутой центральной точкой и причем грань содержит модуль направления движения, определяющий траекторию по меньшей мере по части грани, и модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно упомянутой центральной точки одного из других элементов по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и упомянутой траектории другого элемента, при взаимодействии с модулем движения, при этом модуль движения выполнен с возможностью соединения с гранью одного из упомянутых элементов, и выполнен с возможностью смещения упомянутой центральной точки одного элемента относительно упомянутой центральной точки одного из других элементов, при взаимодействии с модулем направления движения одного из других элементов, причем модуль направления движения, модуль движения и модуль ограничения движения определяют различные типы модулей.
Для смещения упомянутой центральной точки первого элемента от упомянутой центральной точки второго элемента и по направлению к упомянутой центральной точке третьего элемента, первая грань по меньшей мере одной грани первого элемента обращена к по меньшей мере одному из второй грани второго элемента и третьей грани третьего элемента, таким образом обеспечивая противостоящие грани.
Для смещения, модуль движения взаимодействует с по меньшей мере одним модулем направления движения и с по меньшей мере одним модулем ограничения движения, причем упомянутые противостоящие грани обеспечивают упомянутые взаимодействующие модули в процессе смещения, по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем по меньшей мере одного иного типа по меньшей мере одной другой из упомянутых противостоящих граней в процессе смещения, и по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем иного типа второй грани и по меньшей мере одним модулем иного типа модуля третьей грани.
Изобретение обеспечивает систему элементов, которая обеспечивает гибкое использование. Элементы могут использоваться, чтобы вручную возвести конструкцию. Обеспечение совместимости и согласованности такой конструкции может быть легким. Как станет понятно ниже, элементы могут содержать дополнительные признаки, которые могут позволить элементам смещаться управляемо или даже автономно.
Было обнаружено, что такая система с элементами и/или элементы обеспечивают гибкую конструкцию объекта. Даже возможно выполнить элементы в пределах настоящего описания, чтобы сгруппировать элементы в объект и изменить форму объекта автономно.
В варианте выполнения, элемент содержит средство крепления, выполненное с возможностью взаимодействия с функционально совмещенным средством крепления аналогичного элемента и содержащее удерживающее состояние и освобожденное состояние, упомянутое средство крепления в упомянутом удерживающем состоянии зацеплено с совмещенным средством крепления аналогичного элемента для удерживания элемента спозиционированным относительно аналогичного элемента, и в упомянутом освобожденном состоянии расцеплено с совмещенным средством крепления, и чувствительное средство для обеспечения обнаружения захвата, причем упомянутое обнаружения захвата включает в себя обнаружение одного, выбранного из действия, приводящего к захвату элемента, наличие захвата на упомянутом элементе, действия по освобождению захвата элемента и их комбинации, в котором упомянутое чувствительное средство функционально соединено с средством крепления для приведения в действие, при упомянутом обнаружении захвата, по меньшей мере одного функционально совмещенного средства крепления между удерживающим состоянием и освобожденным состоянием. В варианте выполнения, по меньшей мере два элемента содержат это средство, во всех конкретных вариантах выполнения, все элементы системы содержат это средство.
В варианте выполнения, средство крепления приводится в действие между удерживающим состоянием и освобожденным состоянием, когда упомянутое обнаружение захвата включает в себя одно из действия, приводящего к захвату элемента, и действия по освобождению захвата элемента.
В варианте выполнения, чувствительное средство дополнительно выполнено с возможностью определения расстояния до аналогичного элемента. Это расстояние может являться наиболее коротким расстоянием. Это расстояние может, например, также быть определено вдоль заданной траектории. Другими словами, при перемещении по траектории, насколько далеко удален этот другой элемент. В частности, при измерении расстояния до соседнего элемента, это позволяет улучшить приведение в действие средства крепления. Это дополнительно позволяет функциональное соединение, например с модулем движения (описан ниже), например для регулирования скорости, такой как скорость сближения. Чувствительное средство также может измерять ориентацию элемента относительно одного или более других элементов. Более того или дополнительно, чувствительное средство может определять совмещение средства крепления со средством крепления одного или более других элементов.
В варианте выполнения, чувствительное средство содержит датчики, которые согласованы по времени для обеспечения обнаружения захвата. Согласование датчиков по времени позволяет улучшить обнаружение захвата. Это, например, позволяет обнаружить, если две грани вовлечены в процесс захвата.
В варианте выполнения, чувствительное средство содержит первый и второй датчики, функционально соединенные друг с другом для обеспечения обнаружения захвата.
В варианте выполнения, элемент является трехмерным и содержит:
- центральную точку в упомянутом элементе;
- по меньшей мере три грани, соединенные с упомянутой центральной точкой;
- упомянутое средство крепления, соединенное с первым гранью из упомянутых по меньшей мере трех граней, выполненное с возможностью взаимодействия с функционально совмещенным удерживающим модулем противостоящей грани аналогичного элемента, для взаимодействия в упомянутом удерживающем состоянии для удерживания первой грани спозиционированной относительно противостоящего грани, и в упомянутом освобожденном состоянии для не удерживания первого грани спозиционированной;
- упомянутое чувствительное средство, содержащее первый и второй датчик, причем
- первый датчик соединен со вторым гранью упомянутых по меньшей мере трех граней;
- второй датчик соединен с третьим гранью упомянутых по меньшей мере трех граней;
в котором упомянутые по меньшей мере два датчика функционально соединены с средством крепления первой грани для приведения в действие, при упомянутом обнаружении захвата, упомянутых удерживающих модулей противостоящей грани между удерживающим состоянием и освобожденным состоянием.
В варианте выполнения, чувствительное средство содержит оптические датчики с пространственной разрешающей способностью, в частности камеры.
В варианте выполнения, средство крепления содержит по меньшей мере один удерживающий модуль, содержащий две части, выполненные с возможностью прикладывания силы друг к другу для удерживания граней спозиционированными, и в котором упомянутые две части обеспечены на гранях, содержащих удерживающий модуль, позволяя каждой грани, снабженной удерживающим модулем, удерживаться на месте относительно противостоящей грани, снабженной удерживающим модулем, причем одна часть удерживающего модуля грани взаимодействует с другой удерживающей частью противостоящей грани.
В варианте выполнения, удерживающий модуль содержит удерживающее состояние, в котором удерживающий модуль удерживает грани спозиционированными, и освобожденное состояние, в котором грани могут перемещаться друг относительно друга.
В варианте выполнения, средство крепления содержит удерживающий модуль на каждой грани, и упомянутое чувствительное средство содержит датчик на каждой грани, упомянутые датчики и упомянутые удерживающие модули функционально соединены для приведения в действие, при упомянутом обнаружении захвата, упомянутых удерживающих модулей противостоящей грани между удерживающим состоянием и освобожденным состоянием.
В варианте выполнения, чувствительное средство выполнено с возможностью обнаружения совмещения упомянутых удерживающих модулей с удерживающими модулями противостоящих граней.
В связи с этим, обнаружение захвата в его самом широком смысле относится к обнаружению действий, приводящих к захвату элемента, фактическому удерживанию захваченного элемента и действий освобождения элемента из захвата. Захват, в связи с этим, в его самом широком смысле относится к зацеплению элемента с целью обеспечить изменение положения и/или ориентации элемента. Это может быть осуществлено, используя манипулятор робота, имеющий часть, которая может зацеплять элемент и поднимать элемент. Это может, например, предпочтительно включать в себя подъем элемента рукой человека или изменение ориентации рукой человека. Обычно, это требует зацепления двух граней. Часто, две противоположные грани зажимаются между пальцами руки. Часто, действия захвата имеют место в пределах ограниченных интервалов времени. Часто, время между приближением руки к элементу и фактическим зацеплением элемента составляет порядка минут или менее. В частности, это время составляет порядка менее двух минут. Диапазон обнаружения может составлять менее 50 см. Обнаружение захвата в варианте выполнения может содержать передаваемые в мозг человека сигналы.
Различные состояния элементов могут быть определены следующим образом.
Элемент может быть либо «в системе» или «вне системы». Элемент может быть определен как находящийся «в системе», когда он содержит грань, которая может взаимодействовать с противостоящей гранью другого, аналогичного элемента. Например, элемент может быть в системе, когда он содержит грань, которая как находится в физическом контакте с гранью по меньшей мере одного другого, аналогичного элемента, так и надлежащим образом совмещена с гранью по меньшей мере одного другого, аналогичного элемента. Элемент, который определен как находящийся «вне системы», не имеет этих необходимых условий. Группа элементов, которые находятся «в системе», обозначена или называется системой элементов. Множественные (отдельные) комбинации систем элементов могут существовать рядом друг с другом, как и любая комбинация «в системе» и «вне системы». Надлежащее совмещение между элементами «в системе» является существенным для обеспечения смещения или для удерживания некоторого положения.
Когда элемент находится «в системе», тогда относительно смежной грани другого элемента, каждая грань элемента может находится либо в удерживающем состоянии, либо в освобожденном состоянии. В связи с этим, удерживающее состояние может быть определено как состояние, которое влияет на элемент.
В удерживающем состоянии грань элемента не может перемещаться относительно противоположной или противостоящей грани другого, аналогичного элемента. Удерживающее состояние может быть достигнуто посредством одного или более удерживающих модулей между противоположными гранями. Удерживающее состояние также может быть достигнуто посредством другого модуля(-ей), например модуля движения, работающего между двумя элементами, чье движение временно остановлено. Модуль движения может взаимодействовать с модулем ограничения движения и/или модулем направления движения, для того чтобы достигнуто a удерживающий состояние.
Удерживающее состояние в общем является результатом приведения в действие средства крепления. Такое средство крепления может содержать удерживающий модуль. Средство крепления также может содержать выбор из модуля движения, модуля ограничения движения, модуля направления движения. Эти модули могут например совместно приводить к фиксирующему состоянию. Таким образом удерживающее состояние грани может быть разделено на «удерживающее состояние за счет удерживающего модуля» и «удерживающее состояние за счет фиксации модуля движения». Элемент может находиться в одном или обоих этих состояниях в заданное время, и когда либо один, либо оба этих состояния задействованы, элемент находится в удерживающем состоянии. Например, при перемещении элемента по граням других, аналогичных элементов из одного положения в заданное положение, задействуется «удерживающее состояние за счет фиксации модуля движения», когда достигнуто заданное положение. Затем, задействуется «удерживающее состояние за счет удерживающего модуля» до вывода из действия «удерживающего состояния за счет фиксации модуля движения».
Более того, элемент может быть зафиксирован к другому элементу и находиться в удерживающем состоянии различными способами. Элемент может использовать его собственный удерживающий модуль, он может быть зацеплен удерживающим модулем этого другого элемента. Таким образом состояние удерживающего модуля может быть:
либо «фиксация принята», либо «фиксация создана», либо «расфиксировано». Вышеприведенное определение является важным, поскольку «удерживающий модуль» может являться «бесполым», мужским или женским, или «обоеполым» при взаимодействии с другими модулями.
Это может иметь значение, когда элемент изменяет состояния, например когда переходит из удерживающего состояния в освобожденное состояние и имеет граневой фиксирующий модуль, для которого фиксация принята. Тогда может потребоваться связь между элементами, чтобы такое изменение было возможно.
Грань может иметь множество «удерживающих модулей». Например, при делении грани на квадранты, каждый квадрант может иметь удерживающий модуль, например в его центре. Таким образом, когда все удерживающие модули грани «расфиксированы», эта грань может находиться в «освобожденном состоянии» или в «удерживающем состоянии за счет фиксации модуля движения». Два взаимодействующих граневых фиксирующих модуля двух противоположных элементов могут работать вместе, только когда их модули находятся в некотором физическом совмещении. Это охватывает совмещение двух элементов. Следствием этого может служить то, что когда грань находится в «удерживающем состоянии за счет удерживающего модуля», элемент находится в одном из его надлежащих совмещений. Предшественником или преемником «удерживающего состояния» является «освобожденное состояние». Ясно, что преобразование из «освобожденного состояния» в «удерживающее состояние за счет удерживающего модуля» может возникнуть, только когда элемент надлежащим образом совмещен с другим, аналогичным элементом. Кроме того, два других состояния могут быть выделены в удерживающем модуле:
«в совмещении для работы удерживающего модуля» или
«вне совмещения для работы удерживающего модуля».
Когда элемент находится «в системе», это означает, что имеется надлежащее совмещение для возможного смещения модулем движения, например. Смещение элемента и вопрос его совмещения, которые будут описаны ниже.
Элемент «вне системы» по определению не имеет непосредственной возможности «удерживающего состояния» (отсутствует физический контакт с гранью или отсутствуют надлежащие совмещения) и имеет каждую грань в «освобожденном состоянии» или другими словами: элемент находится в полностью «освобожденном состоянии».
Система элементов «в системе» может иметь один или более «удерживающих набор состояний». Это означает: каждый элемент, принадлежащий набору элементов внутри этой системы, имеет один или более задействованных «Удерживающих состояний», и этот набор не может быть разделен на поднаборы, не разрушив одно или более из этих «Удерживающих состояний». Когда «Удерживающее набор состояние» охватывает каждый элемент этой системы, такая система также находится в «удерживающем систему состоянии».
Элемент, который находится либо «в системе», либо «вне системы» может находиться в «не смещаемом состоянии» или в «смещаемом состоянии».
Когда элемент «вне системы» находится в «смещаемом состоянии» это означает, что внешние манипуляции с системой или силы обеспечивают это смещение. Например, элемент может быть поднят рукой человека. Другим примером такой комбинации состояний является элемент, который падает вследствие действия гравитационных сил.
Когда элемент «в системе» находится в «смещаемом состоянии», может иметь место действие либо «непосредственного смещения» или «опосредованного смещения».
«Непосредственное смещение» элемента происходит, когда грань этого элемента зацеплен с по меньшей мере модулем движения или модулем вращения. Эта грань находится не в «удерживающем состоянии», а в «освобожденном состоянии».
«Опосредованное смещение» элемента происходит, когда этот элемент не зацеплен с модулем движения или модулем вращения. Более того, этот элемент является частью набора элементов, которые находятся в «удерживающем набор состоянии». В этом «удерживающем набор состоянии», по меньшей мере один другой элемент этого набора может находиться в «смещаемом состоянии» «непосредственного смещения» (комбинированная аналогия). Основанные на принципах, описанных здесь, возможны различные комбинации.
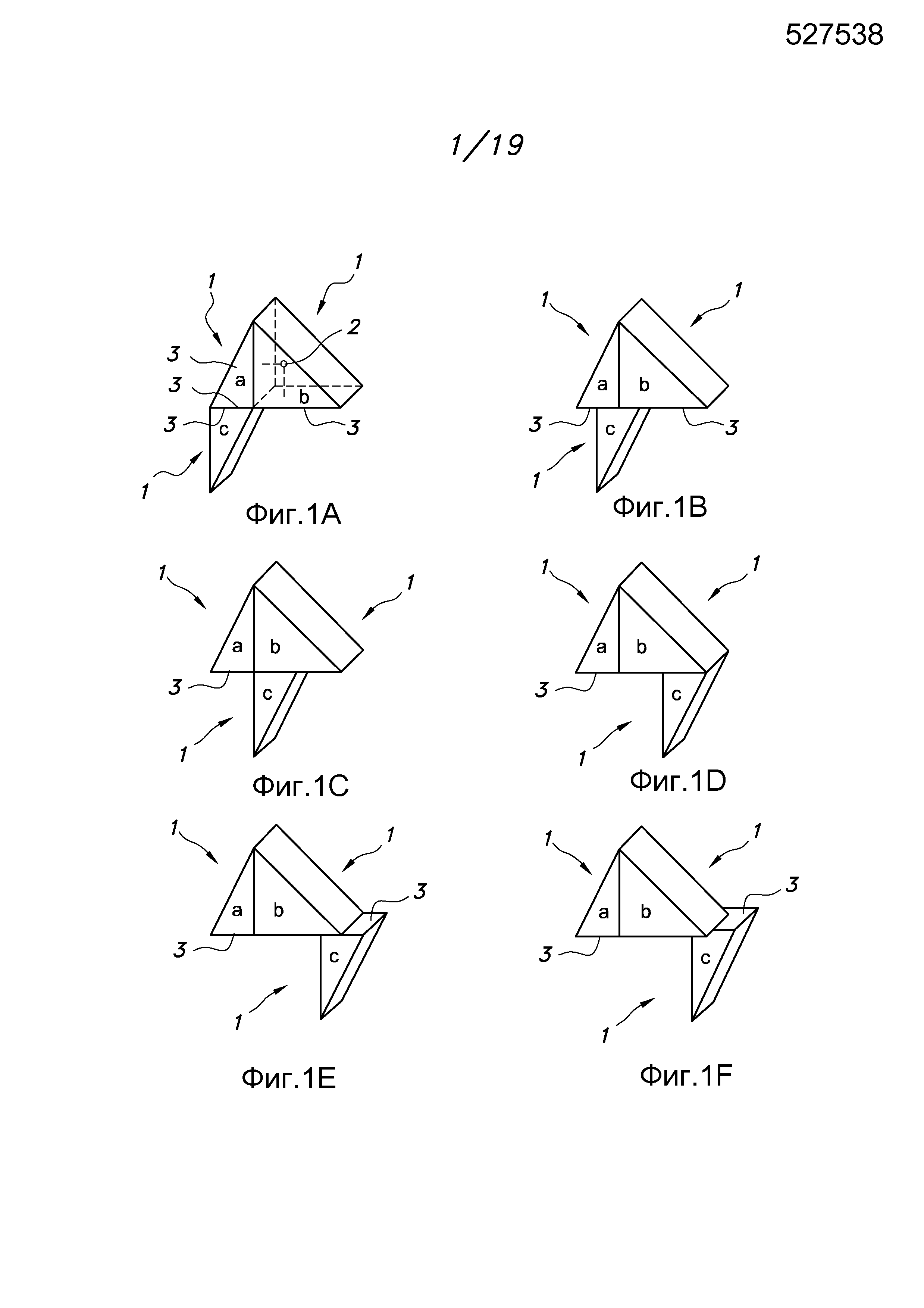
В варианте выполнения, элемент является кубическим и содержит шесть граней. Тогда с позиции элемента имеется шесть направлений: Север, Юг, Восток, Запад, Вверх и Вниз.
Изобретение далее или дополнительно обеспечивает систему, содержащую по меньшей мере первый, второй и третий элемент, которые могут являться типом, определенным выше. Эта система дополнительно содержит модуль движения, причем упомянутые элементы являются трехмерными, и каждый элемент содержит:
- центральную точку в упомянутом элементе;
- по меньшей мере одну грань, соединенную с упомянутой центральной точкой и содержащую:
- модуль направления движения, определяющий траекторию по меньшей мере по части грани;
- модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно упомянутой центральной точки одного из других элементов по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и упомянутой траектории другого элемента, при взаимодействии с модулем движения;
в котором модуль движения выполнен с возможностью соединения с гранью одного из упомянутых элементов, и выполнен с возможностью смещения упомянутой центральной точки одного элемента относительно упомянутой центральной точки одного из других элементов, при взаимодействии с модулем направления движения одного из других элементов, причем модуль направления движения, модуль движения и модуль ограничения движения определяют различные типы модулей;
в котором для смещения упомянутой центральной точки первого элемента от упомянутой центральной точки второго элемента и по направлению к упомянутой центральной точке третьего элемента, первая грань первого элемента обращена к по меньшей мере одной из второй грани второго элемента и третьей грани третьего элемента, таким образом обеспечивая противостоящие грани, и
в котором для смещения:
- модуль движения взаимодействует с по меньшей мере одним модулем направления движения и с по меньшей мере одним модулем ограничения движения, причем упомянутые противостоящие грани обеспечивают упомянутые взаимодействующие модули в процессе смещения;
- по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем по меньшей мере одного иного типа по меньшей мере одного другого из упомянутых противостоящих граней в процессе смещения, и
- по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем иного типа второй грани и по меньшей мере одним модулем иного типа третьей грани.
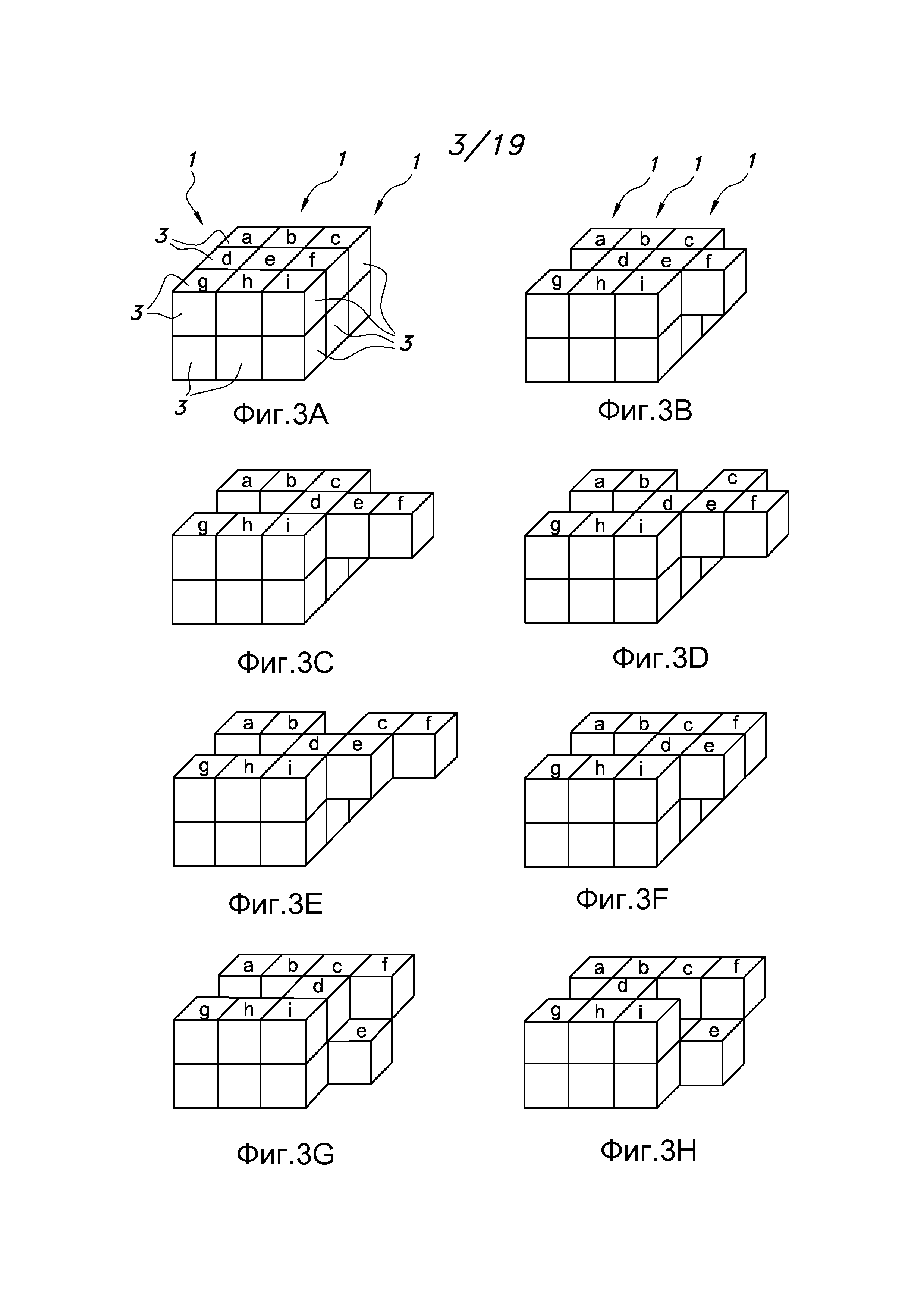
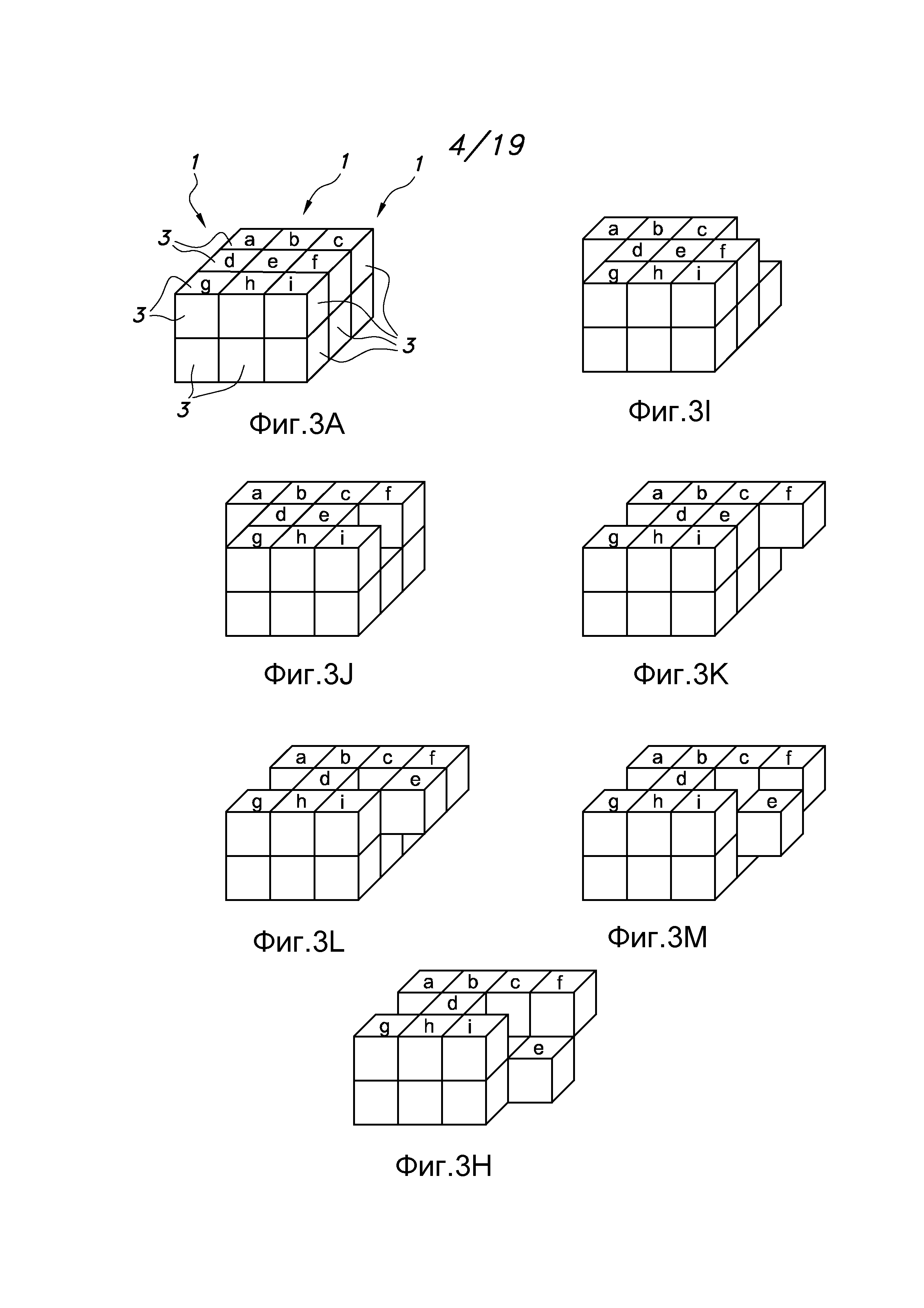
Было обнаружено, что такая система с элементами позволяет гибкое конструирование объекта. Даже возможно выполнить элементы в пределах настоящего описания, чтобы сгруппировать элементы в объект и изменить форму объекта автономно. В варианте выполнения, по меньшей мере один элемент может быть снабжен планом создания формы. В альтернативном варианте выполнения, план создания формы может быть распределен по элементам, и посредством управления связью и распределением элементы вместе могут выполнять изменение формы. План создания формы может состоять из определения конечной формы объекта. Он может альтернативно содержать промежуточную совокупность элементов или промежуточные формы для перехода к конечной форме.
Модуль движения, модуль ограничения движения и модуль направления движения позволяют минимальные расстояния смещения или изменения ориентации элементов, в частности центральных точек элементов, для изменения форм и совокупностей элементов. Таким образом, изменения могут отнять меньше времени и/или меньше энергии.
В этом описании, конфигурация используется для элементов в сборе, которые сгруппированы в по существу согласованной ориентации друг относительно друга. Элементы в такой конфигурации могут образовать объект. Для изменения формы такого объекта один или более элементов перемещаются или смещаются относительно других элементов. Однако наоборот данное утверждение не работает: Элементы могут сместиться, но это не всегда означает, что форма объекта изменилась. Если по меньшей мере некоторые элементы объекта смещаются заданным образом, фактически возможно сместить весь объект.
Грани элементов обращены к другим граням. В самом широком смысле, грани таким образом направлены друг к другу. Противостоящие грани могут быть противоположны друг другу. В варианте выполнения, противостоящие грани могут по меньшей мере частично перекрываться.
Грани могут быть изогнуты. В варианте выполнения, грани являются плоскими, ровными. Таким образом, грань образует плоскость, по которой в варианте выполнения грань другого элемента может скользить. В таком состоянии, грани являются противостоящими, и во время скольжения противоположны друг другу и частично перекрываются.
Различные модули и части «соединены». В частности, это относится к функциональному соединению. В конкретных вариантах выполнения, это относится к частям или модулям, которые соединены физически. Конкретнее, в варианте выполнения это используется для охвата термина соединенный. Конкретно, в варианте выполнения части, грани, модули и подобное, которые закреплены или установлены. В связи с этим, закрепление относится, например, к сварке, склеиванию и подобному. Установка может относиться к использованию крепежных приспособлений, таких как болты и гайки.
«Взаимодействующие» относится к модулям и/или элементам, которые прикладывают силу друг к другу, но также для обмена данными, обмена частями управляющей программы и обмена обратной связью. В варианте выполнения, взаимодействующие относится к модулям и/или элементам, которые находятся в контакте. В варианте выполнения, взаимодействующие относится к модулям и/или элементам, которые зацепляются.
Различные модули обеспечены «для смещения». Это функционально относится к процессу смещения элемента. Это также может включать в себя приготовления к смещению элементов. «Для смещения» также может включать в себя последующую обработку. Это может включать в себя, например, смещение одного или более модулей движения по одному или более граням элемента, или между элементами, в их фактические положения на грани, где они начинают смещать элемент. Это может, например, также включать в себя хранение модуля движения после использования, или передачи конечного положения другим элементам. «Для смещения» может, например, также включать в себя время, в течение которого происходит обмен данными при приготовление к приведению элемента в движение.
«В процессе смещения» относится к интервалу времени, в течение которого элементы фактически находятся в движении. Для смещения элементов, может возникать множество моментов «в процессе смещения».
Грани обеспечены, чтобы позволить грани приложить или передать усилие другой грани.
Перемещение элемента может фактически быть разделено на фактическое смещение центральной точки элемента и на изменение ориентации. Изменение ориентации, например, вращение вокруг линии, проходящей через центральную точку: центральная точка не изменяет своего положения. В связи с этим, модуль движения элемента служит средством для фактического смещения центральной точки элемента. Элемент может дополнительно содержать модуль ориентации для изменения ориентации элемента. В варианте выполнения, модуль движения и модуль ориентации могут быть объединены.
Элемент может содержать части, образующие внешний контур элемента. Например, элемент может содержать ребра. Элемент содержит грань. Грань по меньшей мере имеет опоры, позволяющие одному элементу опираться на другой элемент. Ребра, например, образуют такую грань. Пространство между ребрами может быть открытым. Альтернативно, опора может быть обеспечена прикладыванием силы, например аэродинамической или электромагнитной сил. В варианте выполнения, каждый элемент дополнительно содержит грань, снабженную поверхностью на расстоянии от упомянутой центральной точки. Такая поверхность обеспечивает твердую, физическую опору. Поверхность может быть полностью сплошной. Альтернативно, грань может содержать поверхность, которая имеет отверстия. Например, поверхность может быть снабжена отверстиями. Часто, такая грань является плоской, образуя ограниченную плоскость.
В некотором смысле, модуль движения фактически приводит в действие перемещение элемента относительно другого элемента.
Модуль направления движения в некотором смысле управляет направлением смещения элемента относительно другого элемента. В случае, когда один элемент находится в соприкосновении с другим элементом, модуль направления движения может содержать направляющую на одном элементе, и другой элемент следует по этой направляющей.
Один или более элементов может дополнительно содержать модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно упомянутой центральной точки одного из других элементов по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и упомянутой траектории другого элемента, при взаимодействии с модулем движения другого элемента. Взаимодействие между по меньшей мере одним из модуля движения, модуля направления движения и модуля ограничения движения на грани элемента с по меньшей мере одним другим модулем на элементе с противостоящей гранью может фактически ограничить расстояние между этими элементами. Это может удерживать эти элементы вместе или освобождать эти элементы, чтобы позволить их перемещение друг от друга. Это также может удерживать расстояние между этими элементами в заданных пределах. В сочетании и/или отдельным действием, взаимодействие также может удерживать ориентацию этих элементов относительно других элементов. Эта функция возникает в процессе взаимодействия модуля движения, модуля ограничения движения и модуля направления движения. Это также может иметь место, когда элементы больше не смещаются. В этом случае, модули могут по-прежнему взаимодействовать. Это может быть названо удерживающим состоянием.
Модули текущей система, в частности элементы, обеспечивают надежное смещение элементов. Результат смещения является по меньшей мере частично предсказуемым. Смещение происходит по меньшей мере по части траектории. Взаимодействие между одним или более модулями движения, одним или более модулями направления движения, и одним или более модулями ограничения движения ограничивает смещение центральной точки относительно одной или более других центральных точек других элементов по меньшей мере по одной траектории. Такая траектория может быть задана. Она может являться установленным маршрутом по грани. Например, рельс обеспечивает такой установленный маршрут.
Изобретение дополнительно относится к системе, содержащей по меньшей мере первый, второй и третий трехмерный элемент, причем каждый элемент содержит:
- центральную точку в упомянутом элементе;
- модуль направления движения, соединенный с упомянутой центральной точкой и определяющий траекторию по элементу;
- модуль движения, выполненный с возможностью смещения центральной точки относительно второй центральной точки одного из других элементов, используя модуль направления движения этого другого элемента;
- модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно упомянутой второй центральной точки по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и второй траектории другого элемента;
в котором упомянутые модули направления движения по меньшей мере двух из упомянутых элементов функционально соединены, чтобы позволить модулю движения сместить центральную точку третьего элемента смещения, который находится в соприкосновении с одним из двух других элементов, от центральной точки одного из двух других элементов и по направлению к центральной точке и в соприкосновение с другим из двух других элементов.
В варианте выполнения, первая грань изменяет свой модуль взаимодействия для смещения. В варианте выполнения, в процессе смещения, модуль движения соединен с упомянутой первой гранью.
В варианте выполнения, по меньшей мере один модуль второй грани и по меньшей мере один модуль третьей грани взаимодействуют с иным модулем первой грани в процессе смещения.
В варианте выполнения, упомянутые модули второй грани и третьей грани взаимодействуют один за другим.
В варианте выполнения, упомянутые модули второй грани и третьей грани взаимодействуют один за другим с иным модулем первой грани для смещения.
В варианте выполнения, упомянутые модули первой, второй и третьей грани взаимодействуют попеременно в процессе смещения.
В варианте выполнения, для смещения, взаимодействует по меньшей мере один из упомянутых модулей от каждой из первой, второй и третьей граней.
В варианте выполнения, каждый из упомянутых элементов содержит модуль движения. В частности, каждый из элементов содержит по меньшей мере один модуль движения. Это увеличивает гибкость и скорость.
В варианте выполнения, каждая из по меньшей мере одной грани упомянутых элементов содержит модуль движения. Это вновь увеличивает скорость и гибкость, позволяя элементам работать, например, автономно или в подгруппах.
В варианте выполнения, каждый элемент содержит по меньшей мере две из упомянутых граней. При надлежащей ориентации граней элемента друг относительно друга становится легче выполнять например движение в двух измерениях и даже в трех измерениях.
В варианте выполнения, модуль движения выполнен с возможностью изменения ориентации одного элемента, соединенного с модулем движения, и другого элемента, имеющего грань, имеющую модуль, взаимодействующий с модулем движения, друг относительно друга. В частности, упомянутое изменение ориентации может содержать поворот грани, соединенной с модулем движения, и грани, противостоящей упомянутой грани, соединенной с модулем движения, друг относительно друга. Более конкретно, для поворота вокруг оси, проходящей через упомянутую центральную точку одного элемента. Ось поворота может быть перпендикулярна грани.
В варианте выполнения, по меньшей мере один из упомянутых элементов дополнительно содержит модуль ориентации, выполненный с возможностью изменения ориентации одного элемента и другого из упомянутых элементов друг относительно друга. В частности, упомянутое изменение ориентации может содержать поворот грани, соединенной с модулем ориентации, и грани, противостоящей упомянутой грани, соединенной с модулем ориентации, друг относительно друга, более конкретно, поворот вокруг оси, проходящей через упомянутую центральную точку одного элемента. Ось поворота может быть перпендикулярна грани.
В варианте выполнения, модуль движения выполнен с возможностью отсоединения самого себя от грани.
В варианте выполнения, модуль движения выполнен с возможностью смещения, когда он отсоединен от грани.
В варианте выполнения, модуль движения выполнен с возможностью смещения к соседнему элементу, когда он отсоединен от грани.
В варианте выполнения, один элемент содержит по меньшей мере две грани, и модуль движения выполнен с возможностью смещения от одной грани к следующей грани одного элемента.
В варианте выполнения, модуль движения выполнен с возможностью смещения в пределах элемента от одной грани к другой грани одного элемента, когда он отсоединен от грани. Обеспечение перемещения модуля движения от одной грани к другой, или даже от одного элемента к другому, может сэкономить на количестве модулей движения, которое необходимо в системе элементов.
В варианте выполнения, модуль движения, модуль ограничения движения и модуль направления движения содержат удерживающее состояние, в котором по меньшей мере частично перекрывающиеся противостоящие грани удерживаются в их взаимном расположении, причем упомянутое удерживающее состояние в частности включает в себя по меньшей мере модуль движения от одной грани и модуль ограничения движения от грани, противостоящей упомянутой одной грани.
В варианте выполнения, каждый элемент содержит удерживающий модуль, соединенный с гранью, для взаимодействия с удерживающим модулем противостоящей грани для удерживания грани спозиционированной относительно противостоящей грани. Удерживающий модуль удерживает по меньшей мере одно из положения и ориентации. В варианте выполнения, удерживающий модуль элемента может зацеплять другой элемент. В варианте выполнения, удерживающий модуль содержит две части, выполненные с возможностью прикладывания силы друг к другу для удерживания элементов спозиционированными и/или в их ориентациях друг относительно друга. В варианте выполнения, один элемент приводит в действие его первую часть удерживающего модуля, чтобы зацепить вторую часть удерживающего модуля другого элемента. В этом или другом варианте выполнения, другой элемент может в свою очередь приводить в действие его вторую часть удерживающего модуля, чтобы расцепиться из первой части удерживающего модуля другого элемента.
В варианте выполнения, удерживающий модуль содержит две части, выполненные с возможностью прикладывания силы друг к другу для удерживания граней спозиционированными.
В варианте выполнения, удерживающий модуль содержит две части, выполненные с возможностью прикладывания силы друг к другу для удерживания граней спозиционированными, и в котором упомянутые две части обеспечены на гранях, содержащих удерживающий модуль, позволяя каждой грани, снабженной удерживающим модулем, удерживаться на месте относительно противостоящей грани, снабженной удерживающим модулем, причем одна часть удерживающего модуля грани взаимодействует с другой удерживающей частью противостоящей грани.
В варианте выполнения, удерживающий модуль содержит удерживающее состояние, в котором удерживающий модуль удерживает грани спозиционированными, и освобожденное состояние, в котором грани могут перемещаться друг относительно друга.
В варианте выполнения, по меньшей мере одна грань каждого элемента соединена с элементом.
В варианте выполнения, модуль движения соединен с гранью.
В варианте выполнения, система дополнительно содержит четвертый такой элемент, содержащий по меньшей мере признаки первого, второго и третьего элементов, и обеспечивающий упомянутой системе четвертый из по меньшей мере одной грани.
В варианте выполнения, для смещения, четвертая грань обращена к первой грани.
В варианте выполнения, во время смещения, первый элемент смещается в первом направлении, и в котором дополнительное, последующее смещение содержит:
по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем по меньшей мере одного иного типа четвертой грани, в то же время дополнительно смещаясь в дополнительном направлении, отличном от первого направления, в частности под углом к первому направлению.
В варианте выполнения, первый элемент дополнительно содержит дополнительный по меньшей мере одна из упомянутых граней, обеспечивая упомянутой системе пятую грань. Для смещения пятая грань может быть обращена к четвертой грани.
В варианте выполнения, во время смещения, первый элемент смещается в первом направлении, и в котором дополнительное, последующее смещение содержит:
пятую грань, обращенную к четвертой грани, и
по меньшей мере один модуль пятой грани взаимодействует с по меньшей мере одним модулем по меньшей мере одного иного типа четвертой грани, в то же время дополнительно смещаясь в дополнительном направлении, отличном от первого направления, во время смещения.
В варианте выполнения, модуль направления движения по меньшей мере одного из упомянутых элементов выполнен с возможностью обеспечения упомянутой траектории функционально вокруг элемента.
В варианте выполнения, модуль направления движения по меньшей мере одного элемента выполнен с возможностью образования дополнительной, второй траектории, пересекающей упомянутую заданную, первую траекторию. Это при работе обеспечивает смещение одного из других элементов в двух измерениях. Траектории, например, опоясывают или проходят вокруг центральной точки.
В варианте выполнения, упомянутые элементы содержат по меньшей мере две из упомянутых грани, снабженных поверхностью на расстоянии от упомянутой центральной точки.
В варианте выполнения, по меньшей мере часть модуля движения выполнена с возможностью внутреннего смещения в пределах элемента.
В варианте выполнения, по меньшей мере часть модуля движения выполнена с возможностью изменения его ориентации в пределах элемента.
В варианте выполнения, упомянутые элементы содержат по меньшей мере две из упомянутых граней, причем упомянутые элементы смежные друг с другом, и упомянутые модули направления движения упомянутых граней соединены друг с другом.
В варианте выполнения, упомянутые грани содержат границы, причем упомянутые модули направления движения распространяются до по меньшей мере одной из упомянутых границ.
В варианте выполнения, модуль направления движения содержит дорожку выполненных с возможностью детектирования сигналов, в частности дорожку из электромагнитного излучения, такого как свет, магнитную дорожку, электростатическую дорожку, звуковую или ультразвуковую дорожку. Когда снабжен одним или более датчиками, возможно следовать за дорожкой.
В варианте выполнения, упомянутая траектория содержит физическую направляющую.
В варианте выполнения, упомянутая траектория содержит рельс. Примером этого может служить тип рельсов, который используется для поездов.
В варианте выполнения, упомянутая траектория по меньшей мере частично следует прямой линии.
В варианте выполнения, элемент содержит по меньшей мере одну грань, содержащую поверхность, снабженную модулем направления движения.
В варианте выполнения, модуль направления движения содержит по меньшей мере две части модуля направления движения, образующие плоскость.
В варианте выполнения, две части модуля направления движения имеют по меньшей мере одно пересечение, в частности упомянутые части модуля направления движения являются прямыми и пересекаются друг с другом под прямым углом.
В варианте выполнения, элемент содержит по меньшей мере одну грань, содержащую поверхность, снабженную модулем движения, в частности упомянутая поверхность является ровной плоскостью, образующей грань элемента.
В варианте выполнения, элемент содержит по меньшей мере одну грань, содержащую поверхность, снабженную модулем движения и модулем направления движения.
В варианте выполнения, элемент содержит ряд граней, причем каждый имеет поверхность, в частности упомянутые грани, образующие упомянутые элементы.
В варианте выполнения, элемент содержит ряд из по меньшей мере двух из упомянутых граней, в частности элемент содержит ряд из соединенных граней, образующих грани элемента.
В варианте выполнения, элемент содержит по меньшей мере 4 грани, в частности по меньшей мере 6 граней, более конкретно противоположных и имеющих ортогонально направленную нормаль.
В варианте выполнения, элемент является телом правильной формы.
В варианте выполнения, элемент является по существу блоком, более конкретно кубом. Преимущество кубов состоит в том, что они обеспечивают простую укладку.
В варианте выполнения, модуль ограничения движения содержит первую часть модуля ограничения движения, предназначенную для физического зацепления другого элемента и ограничения движения в первом направлении, имеющем компонент, перпендикулярный упомянутой траектории.
В варианте выполнения, модуль ограничения движения содержит вторую часть модуля ограничения движения, предназначенную для физического зацепления другого элемента и ограничения движения во втором направлении, имеющем компонент, перпендикулярный упомянутой траектории и перпендикулярный первому направлению.
Изобретение дополнительно относится к элементу, содержащему:
средство крепления, выполненное с возможностью взаимодействия с функционально совмещенным средством крепления аналогичного элемента, и содержащее удерживающее состояние и освобожденное состояние, упомянутое средство крепления в упомянутом удерживающем состоянии зацеплено с совмещенным средством крепления аналогичного элемента для удерживания элемента спозиционированным относительно аналогичного элемента, и в упомянутом освобожденном состоянии расцеплено с совмещенным средством крепления, и
чувствительное средство для обеспечения обнаружения захвата, причем упомянутое обнаружения захвата включает в себя обнаружение одного, выбранного из действия, приводящего к захвату элемента, наличие захвата на упомянутом элементе, действия по освобождению захвата элемента и их комбинации, в котором упомянутое чувствительное средство функционально соединено со средством крепления для приведения в действие, при упомянутом обнаружении захвата, по меньшей мере одного функционально совмещенного средства крепления между удерживающим состоянием и освобожденным состоянием. Этот элемент позволяет легкое возведение, например, подъемом и размещением рукой человека элемента на другом элементе, или посредством другого средства, которое зацепляет элемент и перемещает его в другое положение или место.
Изобретение дополнительно относится к элементу, причем упомянутые элементы являются трехмерными и содержат:
- центральную точку в упомянутом элементе;
- по меньшей мере одну грань, соединенную с упомянутой центральной точкой, и причем грань содержит:
- модуль направления движения, определяющий траекторию по меньшей мере по части грани;
- модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно центральной точки аналогичного элемента по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и упомянутой траектории аналогичного элемента, при взаимодействии с модулем движения;
- модуль движения,
в котором модуль движения выполнен с возможностью соединения с гранью элемента и выполнен с возможностью смещения упомянутой центральной точки относительно упомянутой центральной точки аналогичного элемента, при взаимодействии с модулем направления движения аналогичного элемента, причем модуль направления движения, модуль движения и модуль ограничения движения определяют различные типы модулей,
в котором для смещения упомянутой центральной точки элемента от упомянутой центральной точки аналогичного элемента и по направлению к центральной точке дополнительного аналогичного элемента, первая грань по меньшей мере одной грани элемента обращена к по меньшей мере одному из второй грани аналогичного элемента и третьей грани дополнительного аналогичного элемента, таким образом обеспечивая противостоящие грани, и
в котором для смещения:
- модуль движения взаимодействует с по меньшей мере одним модулем направления движения и с по меньшей мере одним модулем ограничения движения, причем упомянутые противостоящие грани обеспечивают упомянутые взаимодействующие модули в процессе смещения;
- по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем по меньшей мере одного иного типа по меньшей мере одного другого из упомянутых противостоящих граней в процессе смещения, и
по меньшей мере один модуль первой грани взаимодействует с по меньшей мере одним модулем иного типа второй грани и по меньшей мере одним модулем иного типа третьей грани. Этот элемент позволяет систему, которая может изменять свою форму автономно или которая изменяет свою форму по команде. Элементы могут быть способны смещать сами себя: элемент может смещаться автономно или по команде.
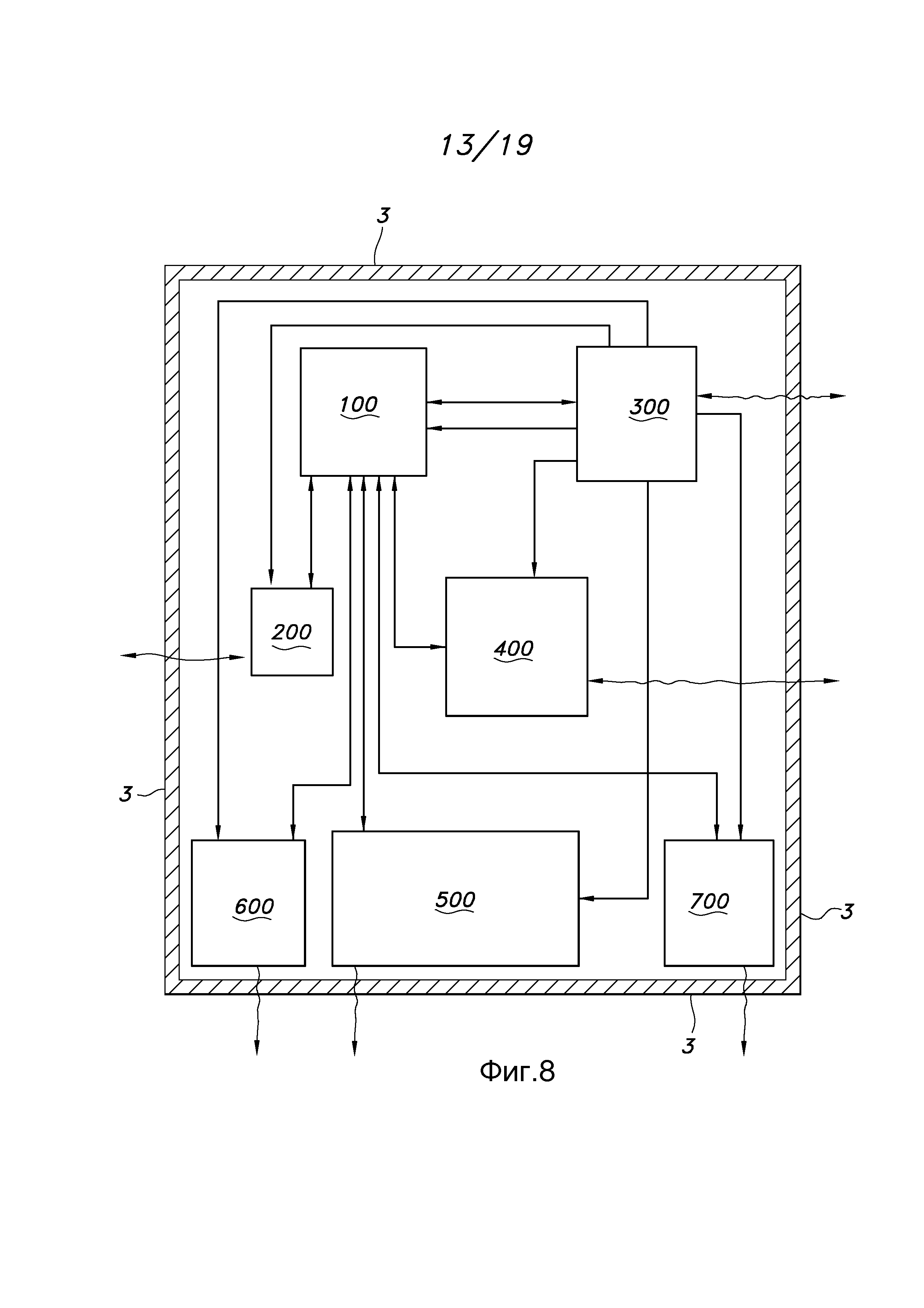
Изобретение дополнительно относится к элементу, содержащему:
- по меньшей мере одну грань, содержащую наружную поверхность для обеспечения опоры для грани другого, аналогичного элемента;
- по меньшей мере один удерживающий модуль для удерживания элемента относительно по меньшей мере одного другого, аналогичного элемента, причем упомянутое удерживание выбрано из удерживания положения и удерживания ориентации;
- по меньшей мере один модуль движения для перемещения элемента относительно по меньшей мере одного другого, аналогичного элемента по существу вдоль или по наружной поверхности по меньшей мере одного другого, аналогичного элемента, причем упомянутое перемещение выбрано из смещения друг относительно друга центра масс, смещения друг относительно друга геометрического центра и изменение ориентации друг относительно друга;
- модуль связи для обмена данными с по меньшей мере одним другим, аналогичным элементом, причем упомянутые данные содержат по меньшей мере один статус положения;
- модуль обработки данных, функционально соединенный с модулем связи для обработки данных от модуля связи;
- энергетический модуль, функционально соединенный для обеспечения энергией по меньшей мере модуля смещения, модуля связи и модуля обработки данных, в котором
модуль обработки данных содержит программное обеспечение, которое при работе на упомянутом модуле обработки данных содержит этапы:
- получение заданного положения, выбранного из местоположения и ориентации и их комбинации, для элемента посредством модуля связи данных;
- получение информации о текущем положении;
- создание по меньшей мере одной команды движения для модуля движения для перемещения элемента из текущего положения в упомянутое заданное положение посредством перемещения его наружной поверхности по или вдоль упомянутой наружной поверхности по меньшей мере одного другого, аналогичного элемента;
- снабжение модуля движения упомянутой по меньшей мере одной командой движения.
В связи с этим, создание команды движения может содержать вычисление команды движения, или это может содержать вычисление промежуточных этапов. Таким образом, это может содержать вычисление по меньшей мере одной команды движения для перемещения элемента по направлению к заданному положению.
Различные признаки элементов и/или систем могут быть объединены. Элемент может, например, содержать модуль движения, модуль направления движения и модуль ограничения движения, и также содержать удерживающий модуль и чувствительный модуль. Система может содержать элементы, имеющие все эти модули. Система также может содержать элементы, которые имеют один или более из этих модулей или средств, и другие элементы, которые могут иметь другие из этих модулей или средств. Более того, признаки могут отличаться для каждой грани элемента.
В варианте выполнения, при работе элемент находится в физическом соприкосновении с по меньшей мере одним другим, аналогичным элементом, причем его наружная поверхность по меньшей мере частично соприкасается с по меньшей мере частью наружной поверхности по меньшей мере одного другого, аналогичного элемента.
В варианте выполнения, элементы содержат по меньшей мере одну наружную поверхность и, при смещении, поверхность смещается по существу параллельно опирающейся наружной поверхности другого, аналогичного элемента. В варианте выполнения, поверхности скользят друг относительно друга, например с воздушной подушкой между поверхностями или с малым расстоянием, например используя магнитный подвес. Таким образом элемент может «парить» над другим элементом.
Элемент может быть охарактеризован его положением и ориентацией. Как положение, так и ориентация могут быть абсолютными и относительными. Относительное положение может быть задано как положение элемента относительно одного или более других элементов. Относительное положение также может быть задано как положение элемента в объекте, который он образует вместе с другими элементами, или положение в группе элементов. В варианте выполнения, элементы могут быть снабжены частью для определения положения, функционально соединенной с модулем обработки данных. Чувствительная часть может являться частью чувствительного средства, описанного ранее.
В варианте выполнения, упомянутая часть определения положения содержит часть определения относительного положения для измерения положения элемента относительно по меньшей мере одного другого, аналогичного элемента. Такой элемент может находиться в соприкосновении с элементом.
В варианте выполнения, упомянутая часть определения положения содержит часть определения локального абсолютного положения для определения локального положения элемента относительно положения внутри группы элементов.
В варианте выполнения, упомянутая часть определения положения содержит часть определения абсолютного положения для определения глобального положения элемента.
В варианте выполнения, элемент содержит часть определения ориентации, функционально соединенную с модулем обработки данных.
В варианте выполнения, упомянутая часть определения ориентации содержит часть определения относительной ориентации для определения ориентации элемента относительно по меньшей мере одного другого, аналогичного элемента, который соприкасается с элементом.
В варианте выполнения, упомянутая часть определения ориентации выполнена с возможностью определения ориентации элемента относительно силового поля, например поля гравитационных сил, поля электростатических сил, поля магнитных сил.
В варианте выполнения, модуль движения содержит рельс со смещателем. Для того чтобы фактически сместить элемент относительно другого элемента, смещатель одного элемента заходит в или на рельс другого элемента. Смещатель может физически зацеплять рельс. Альтернативно, он может приложить одну или более сил к рельсу, даже не входя в физическое соприкосновение с рельсом, аналогично например прикладыванию магнитных сил.
В варианте выполнения, упомянутые рельсы проходят в по меньшей мере двух измерениях, в частности на/в наружной поверхности.
В варианте выполнения, элементы могут содержать общий смещатель.
В варианте выполнения, модуль движения содержит по меньшей мере один пьезоэлемент («шаговый двигатель»).
В варианте выполнения, элемент содержит стенки, образующие внешние границы элемента.
В варианте выполнения, по меньшей мере одна наружная стенка может быть снабжена уплотнением для уплотнения пространства между поверхностями элементов. Таким образом возможно, используя элементы, создать герметичную, или даже воздухонепроницаемую конструкцию.
В варианте выполнения, упомянутое уплотнение имеет положение зацепления и положение расцепления.
В варианте выполнения, упомянутое уплотнение является окружным или периферическим относительно стенки элемента. Уплотнение может содержать части, которые проходят вдоль сторон стенки.
В варианте выполнения, по меньшей мере одна стенка содержит часть плоской поверхности.
В варианте выполнения, элемент содержит по меньшей мере одну функциональную поверхность, например содержащую фотоэлектрический элемент. Альтернативно или в сочетании, функциональная поверхность снабжена одним или более отображающими элементами. Отображающий элемент может содержать один или более пикселей, которые могут образовывать устройство отображения. В варианте выполнения, смежные поверхности нескольких элементов могут образовывать устройство отображения. Таким образом, элементы позволяют отображать визуальную информацию. Более того или альтернативно, функциональная поверхность может содержать определение касания и/или приближения, позволяя образование, например, чувствительной панели. В варианте выполнения, элементы могут быть объединены, чтобы образовать устройство отображения для воспроизведения фильмов, телевидения или игр. В случае элементов, которые имеют стороны менее 1 см, элементы будут во множестве случаев объединять функциональные поверхности в одно устройство отображения из функциональных поверхностей объединенных элементов.
В варианте выполнения, элемент содержит вмещающее пространство в упомянутом элементе, в частности выполненное с возможностью закрытия вмещающее пространство.
В варианте выполнения, упомянутое вмещающее пространство содержит укупорочное средство или привод для закрытия контейнера. В варианте выполнения, привод функционально соединен с модулем обработки данных.
В варианте выполнения, элемент содержит по меньшей мере один привод для выборочного управления модулем движения, в варианте выполнения для отведения модуля движения в пределах элемента. В варианте выполнения, привод функционально соединен с модулем обработки данных.
В варианте выполнения, модуль обработки данных может содержать любой один, выбранный из: памяти, настройки типа «ведущий-ведомый», динамической настройки типа «ведущий-ведомый», план создания [формы], команды позиционирования с отсчетом времени, части отсчета времени.
В варианте выполнения, размер элементов составляет 10 см вплоть до 0,1 микрометра, в частности 1 см вплоть до 0,5 микрометров, более конкретно 1 мм вплоть до 0,5 микрометров, особенно 100 микрометров вплоть до 0,1 микрометра.
Изобретение дополнительно относится к способу переноса материала, содержащий обеспечение материала в по меньшей мере одном элементе, описанном выше.
Изобретение дополнительно относится к элементу, содержащему:
- по меньшей мере одну наружную поверхность, например стенку, позволяющую смещение;
- по меньшей мере один удерживающий модуль, для поддерживания положения элемента относительно или на аналогичном элементе;
- по меньшей мере один модуль движения для смещения элемента относительно других, аналогичных элементов по существу по упомянутой наружной поверхности; модуль движения также может являться отдельной частью, являющейся общей для по меньшей мере одного другого элемента, рельс например, или он может вызывать прямолинейное смещение, вращение, смещение центра масс друг относительно друга, изменение ориентации друг относительно друга; изменение расстояния от элемента до других, аналогичных элементов; Более того, телескопическая часть может быть обеспечена на элементе.
Элемент может дополнительно содержать:
- модуль связи для обмена данными с другими, аналогичными элементами; в частности, упомянутые данные содержат ориентацию, положение относительно других, крепление, внешние физические параметры, такие как температура, данные от датчиков, время, или обновления программного обеспечения или программно-аппаратных средств, причем модуль связи может быть выполнен с возможностью беспроводной передачи данных.
Элемент может дополнительно содержать:
- модуль обработки данных.
Элемент может дополнительно содержать:
- энергетический модуль, например для обеспечения энергией модуля движения, модуля ограничения движения, модуля связи, модуля обработки данных, например обеспечения упомянутой энергией, используя электромагнитное излучение, беспроводную передачу, энергию от другого, аналогичного элемента, энергетический модуль также может обеспечивать хранение энергии.
В связи с этим, «аналогичный» относится к элементам, содержащим по меньшей мере одну грань, снабженную удерживающим модулем и модулем движения, который позволяет взаимодействие.
В варианте выполнения, элементы функционально находятся в физическом соприкосновении друг с другом. В частности, по меньшей мере части их стенок или внешних поверхностей находятся в физическом соприкосновении друг с другом. В частности, определена площадь контакта.
Силы, прижимающие один элемент конструкции к другому, могут быть восприняты посредством модуля движения, удерживающего модуля и/или по меньшей мере частью упомянутой наружной поверхности.
Элементы могут быть объединены в объект, где их положение может быть определено относительно объекта или относительно других элементов. В связи с этим, окружение может иметь значение. В варианте выполнения, окружение определено как элемент вне элемента. В варианте выполнения, окружением могут являться два элемента вне элемента.
В варианте выполнения, элемент по меньшей мере частично образован, используя например 3D печать. В варианте выполнения, клетки растений могут быть использованы для изготовления “древесной” поверхности. Такие клетки растений могут быть прикреплены к несущей подложке.
В варианте выполнения, элементы в элементах в сборе работают совместно, в которых упомянутые элементы имеют настройку типа ведущий/ведомый, в частности динамическую настройку типа ведущий/ведомый.
Изобретение дополнительно относится к игре в сборе, содержащей систему, описанную выше, и вычислительное устройство в связи с по меньшей мере одним из упомянутых элементов, причем упомянутое вычислительное устройство исполняет компьютерную программу, которая, когда работает на упомянутом вычислительном устройстве, выполняет этапы:
- запроса ввода информации пользователем для определения начальной конфигурации упомянутых элементов;
- запроса ввода информации пользователем для определения конечной конфигурации упомянутых элементов;
- связи упомянутой начальной конфигурации и упомянутой конечной конфигурации с по меньшей мере одним из упомянутых элементов.
Изобретение дополнительно относится к реализованному на компьютеру инструменту конструирования, содержащему компьютерную программу, которая, когда работает на вычислительном устройстве, выполняет этапы:
- определения в памяти набора из по меньшей мере трех элементов, причем каждый элемент содержит:
- центральную точку в упомянутом элементе, относительное положение и ориентацию;
- функцию направления движения, соединенную с упомянутой центральной точкой и определяющей траекторию по элементу;
- функцию движения, определяющую смещение центральной точки относительно второй центральной точки одного из других элементов, используя функцию направления движения этого другого элемента;
- функцию ограничения движения, выполненную с возможностью ограничения смещения упомянутой центральной точки относительно второй центральной точки по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и второй заданной траектории другого элемента;
в котором упомянутая функция направления движения по меньшей мере двух из упомянутых элементов образует функциональное соединение между элементами для обеспечения смещения упомянутой функцией движения центральной точки третьего элемента смещения, который соприкасается с одним из двух других элементов, от центральной точки одного из двух других элементов и по направлению к центральной точке и в соприкосновение с другим из двух других элементов.
В связи с этим, инструмент конструирования также может рассматриваться в качестве игрушки, игры или симуляции, в которой признаки функциональных элементов изменяются, и эффекты модификации могут быть исследованы. Другие функции могут, например, являться:
- обнаружением других элементов;
- определением в памяти начальной конфигурации упомянутых элементов;
- определением в памяти конечной конфигурации упомянутых элементов.
Изобретение дополнительно относится к способу игры в игру, содержащий обеспечение компьютерной программы, которая, когда работает на вычислительном устройстве, выполняет:
- определение набора из по меньшей мере трех трехмерных элементов в памяти, причем каждый элемент имеет центральную точку и по меньшей мере одну грань;
- определение в памяти начального состояния набора элементов, посредством начальной внешней границы набора элементов, и по меньшей мере положение каждого элемента относительно упомянутой внешней границы;
- определение в памяти конечного состояния набора элементов, которое конечное состояние отличается от начального состояния и требует смещение по меньшей мере одного элемента;
- обеспечение функционального инструментария, содержащего:
- набор функций направления движения, упомянутые функции направления движения соединены с упомянутой центральной точкой и определяют траекторию по элементу;
- набор функций движения, определяющих смещение центральной точки относительно второй центральной точки одного из других элементов, используя функцию направления движения этого другого элемента;
- набор функций ограничения движения, выполненные с возможностью ограничения смещения упомянутой центральной точки относительно упомянутой второй центральной точки по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и второй траектории другого элемента;
- набор функций датчика, обеспечивающих информацию о окружающей среде элемента;
- представление функционального инструментария пользователю и обеспечение пользователю возможности выбора по меньшей мере одной функции из функционального инструментария для каждого элемента;
- обеспечение для каждого элемента компьютерной программы элемента, управляемо соединяющей упомянутые выбранные функции, и которая компьютерная программа элемента при выполнении собирает входной сигнал от датчика, входной сигнал об относительном положении и позволяет движение;
- запуск на каждом элементе упомянутой компьютерной программы элемента.
Вновь, игра также может являться или содержать симуляцию, как описано выше.
В частности, способ содержит обеспечение входного сигнала в части присутствия другого элемента в соприкосновении с по меньшей мере одной гранью.
В варианте выполнения, способ дополнительно содержит определение в памяти конечного состояния набора элементов посредством конечной внешней границы набора элементов.
В варианте выполнения, способ дополнительно содержит определение в памяти конечного состояния набора элементов посредством определения для по меньшей мере одного элемента требования в отношении набора элементов.
В варианте выполнения, способ дополнительно содержит определение в памяти конечного состояния набора элементов посредством определения для по меньшей мере одного элемента требования в отношении по меньшей мере одного элемента набора элементов.
В варианте выполнения, способ дополнительно содержит определение в памяти конечного состояния набора элементов посредством определения для по меньшей мере одного элемента требования в отношении по меньшей мере одного определенного элемента набора элементов.
Поведение элемента в варианте выполнения имеет фактор случайности. Например выбор направления движения может содержать фактор случайности. В варианте выполнения, движение элемента может быть основано на генетическом алгоритме. В примере, генератор случайных [чисел] влияет на выбор, например, направления движения. В случае, если такой случайный выбор имеет положительный эффект, например он приводит элемент ближе к конечной цели, то значение весового коэффициента, связанного с направлением, увеличивается. Если случайный выбор имеет отрицательный эффект, значение весового коэффициента уменьшается.
В самом широком смысл, поведение элемента может по меньшей мере частично управляться, или задачи, с которыми сталкиваются элемент или элементы в сборе или система элементов, могут быть решены, используя эволюционный алгоритм. Элемент в этом варианте выполнения содержит контроллер, содержащий машинные команды, используя эволюционный алгоритм. Эволюционный алгоритм создает решения для задач оптимизации, используя технологии, основанные на естественной эволюции. Генетический алгоритм фактически является видом эволюционного алгоритма. Дополнительными примерами эволюционных алгоритмов являются наследование, мутация, селекция и кроссинговер (скрещивание). Эволюционный алгоритм использует, например, механизмы, основанные на биологической эволюции, такие как воспроизводство, мутация, рекомбинация и селекция. Множество из этих алгоритмов и механизмов имеют фактор случайности или случая: свойство или выбор, который необходимо сделать, может по меньшей мере частично быть основан на случайном выборе. Таким образом, может оказаться, что решения и режимы работы обеспечивают лучшее решение задачи.
Вследствие изменения в окружающей среде элементов и/или обширного количества вариантов, точное решение или даже оптимальное решение, и/или например статистическая вероятность того, что решение может достичь конечной цели, может не всегда быть вычислено в пределах доступного временного интервала. Когда например один элемент изменяет свое положение, вычисление на/для другого элемента может стать недействительным.
Аналогичные технологии, аналогичные эволюционным алгоритмам, отличаются деталями реализации и природой конкретной прикладной задачи. По существу, эти технологии известны в данной области техники разработки компьютерного программного обеспечения. Элемент, по меньшей мере часть элементов, или элементы в сборе могут использовать следующие алгоритмы или их комбинации:
Генетический алгоритм: Элементы могут использовать его для решения задачи, например в виде строк из чисел (традиционно двоичных, хотя наилучшими представлениями обычно являются те, которые отражают что-либо касательно решаемой задачи), применением операторов, таких как рекомбинация и мутация (иногда одного, иногда обоих).
Генетическое программирование: Элементы могут использовать его для того, чтобы сделать свои управляющие команды более гибкими. Оценивается эффективность, например, частей компьютерной программы в решении задачи, и их соответствие определяется их возможностью решения (вычислительной) задачи.
Эволюционное программирование: Обычно, структура компьютерной программы фиксирована, и ее числовые параметры могут эволюционировать.
Программирование экспрессии генов (GEP): - Аналогично генетическому программированию, GEP также развивает компьютерные программы, но оно исследует систему генотип-фенотип, где компьютерные программы различных размеров закодированы в линейные хромосомы фиксированной длины.
Эволюционная стратегия - Работает с векторами действительных чисел как представления решений, и обычно использует адаптивные частоты мутаций.
Меметический алгоритм - является гибридной формой популяционных методов. Основан как на принципах Дарвина о естественной эволюции, так и на понятии Докинза о меме, и рассматривается как форма популяционного алгоритма, соединенного с индивидуальными процедурами обучения, выполненными с возможностью выполнения локальных уточнений.
Дифференциальная эволюция - Основана различиях векторов. Элементы могут использовать ее для решения задачи численной оптимизации.
Нейроэволюция - Аналогична генетическому программированию, но геномы представляют собой искусственные нейронные сети путем описания структуры и промежуточных весовых коэффициентов. Кодирование генома может быть непосредственным или опосредованным.
Система распознавания на основе обучаемого классификатора является системой машинного обучения с тесными связями с укрепляющим обучением и генетическими алгоритмами. Она, например, содержит совокупность двоичных правил, на которые генетический алгоритм изменяется и включает наилучшие правила. Приспособленность правил может быть основана на технологии укрепляющего обучения.
Элементы или элементы в сборе также могут использовать так называемые Роевые алгоритмы, включающие в себя:
Оптимизация подражанием муравьиной колонии - Основана на идеях поиска пищи муравьями посредством феромонной связи для образования путей. Элементы могут использовать это, когда сталкиваются с задачей комбинаторной оптимизации и задачей теории графов.
Пчелиный алгоритм основан на поведении медоносных пчел при поиске пищи. Когда элементы сталкиваются с таким задачами, как выбор маршрута и планирование.
Поиск кукушки основан на паразитизме высиживания яиц представителями вида кукушек. Он также использует полеты Леви. Элементы могут использовать алгоритм для задач глобальной оптимизации.
Оптимизация методом роя частиц - Основана на идеях стадного поведения животных. Элементы могут использовать этот алгоритм для задач численной оптимизации.
Другие популяционные метаэвристические методы содержат:
«Алгоритм светлячка», основанный на поведении светлячков, привлекающих друг друга вспышками света. Это особенно полезно для мультимодальной оптимизации.
Поиск гармонии - Основан на идеях поведения музыкантов при поиске наилучших гармоний. Этот алгоритм подходит для комбинаторной оптимизации, а также для параметрической оптимизации.
Адаптация по Гауссу - Основана на теории информации. Используется для максимизации производственного выпуска, подбора среднего или усреднения информации. Например, Энтропия в термодинамике и теории информации.
Был обнаружено, что детерминированный набор команд, определяющих действия элемента, не всегда работает: Иногда, вследствие изменений окружающей среды и количества возможных вариантов, «наилучшее решение» действий по достижению цели не существует, или может занять слишком много времени для вычисления. Например, вычисления в одном элементе могут стать недействительными, когда другой элемент изменяет свое положение или ориентацию. Альтернативно, один или более поднаборов действий могут быть определены для достижения промежуточных целей.
Изобретение дополнительно относится к системе, содержащей по меньшей мере первый, второй и третий трехмерный элемент, причем каждый элемент содержит:
- центральную точку в упомянутом элементе;
- модуль направления движения, соединенный с упомянутой центральной точкой и определяющий траекторию по элементу;
- модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно второй центральной точки по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и второй траектории другого элемента;
причем упомянутая система дополнительно содержит
- модуль движения, выполненный с возможностью смещения центральной точки элемента относительно второй центральной точки одного из других элементов, причем модуль движения выполнен с возможностью зацепления модуля направления движения по меньшей мере одного из элементов;
в котором упомянутые модули направления движения по меньшей мере двух из упомянутых элементов функционально соединены для обеспечения смещения модулем движения центральной точки третьего элемента смещения, который соприкасается с одним из двух других элементов, от центральной точки одного из двух других элементов и по направлению к центральной точке и соприкосновению с другим из двух других элементов.
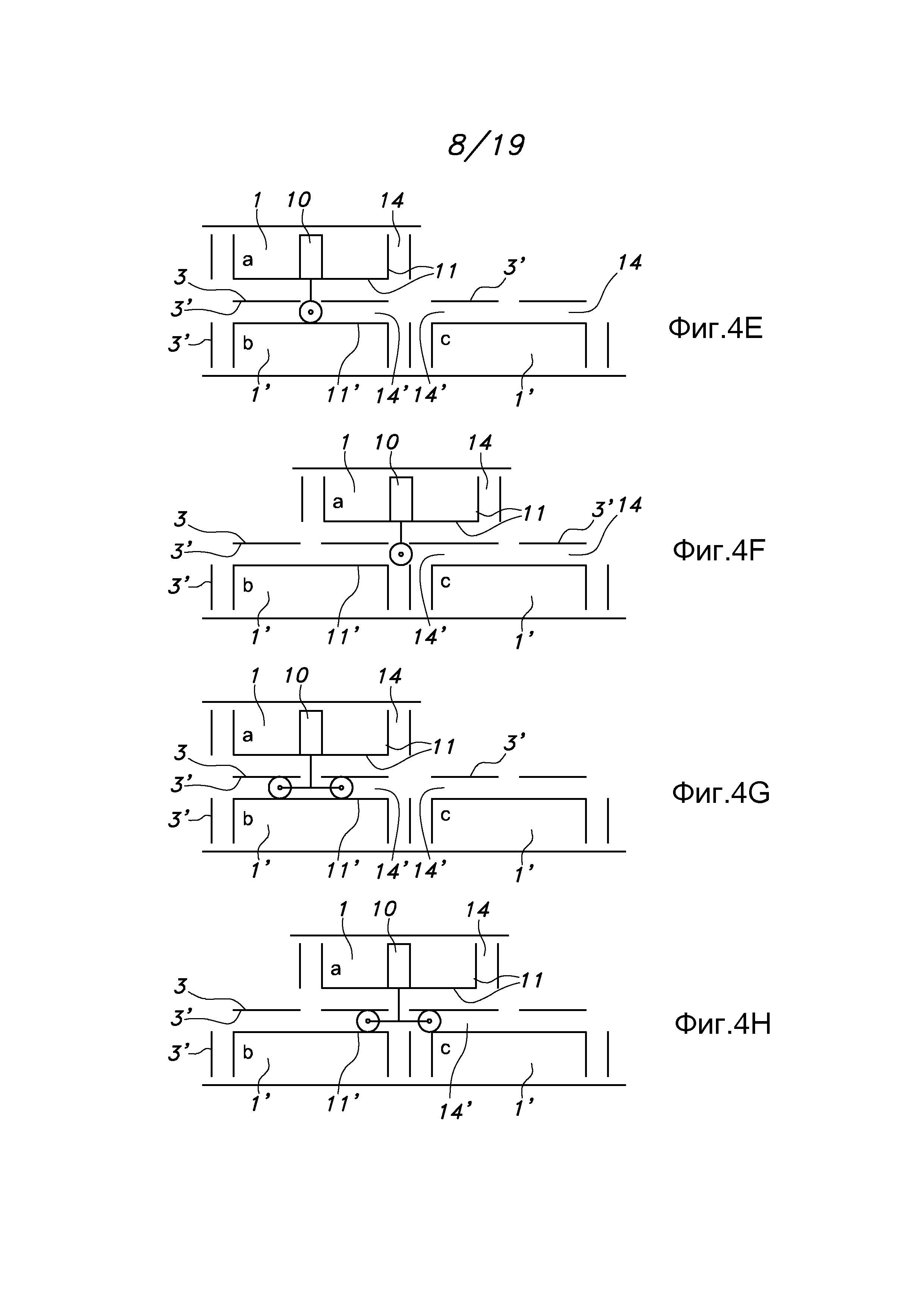
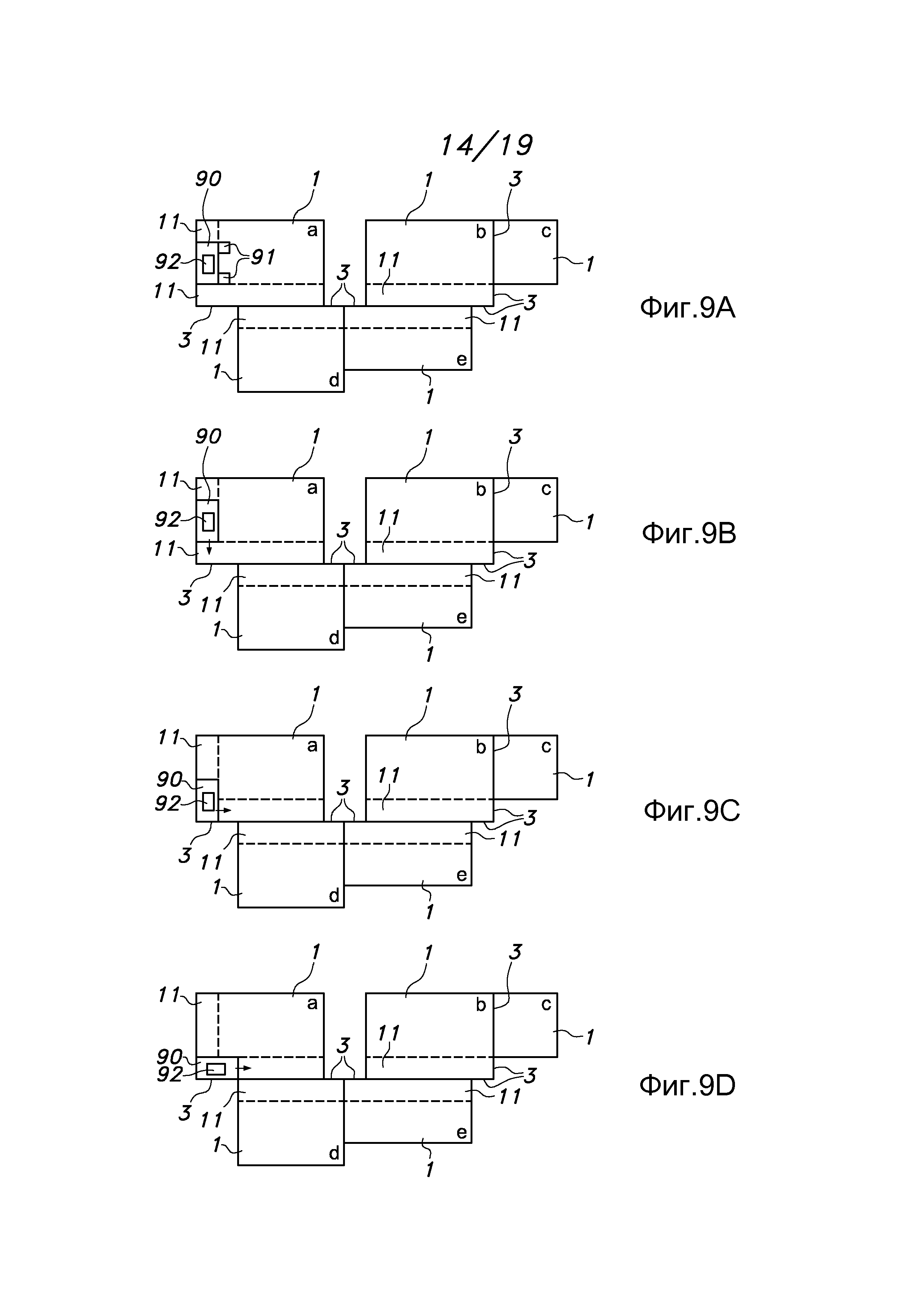
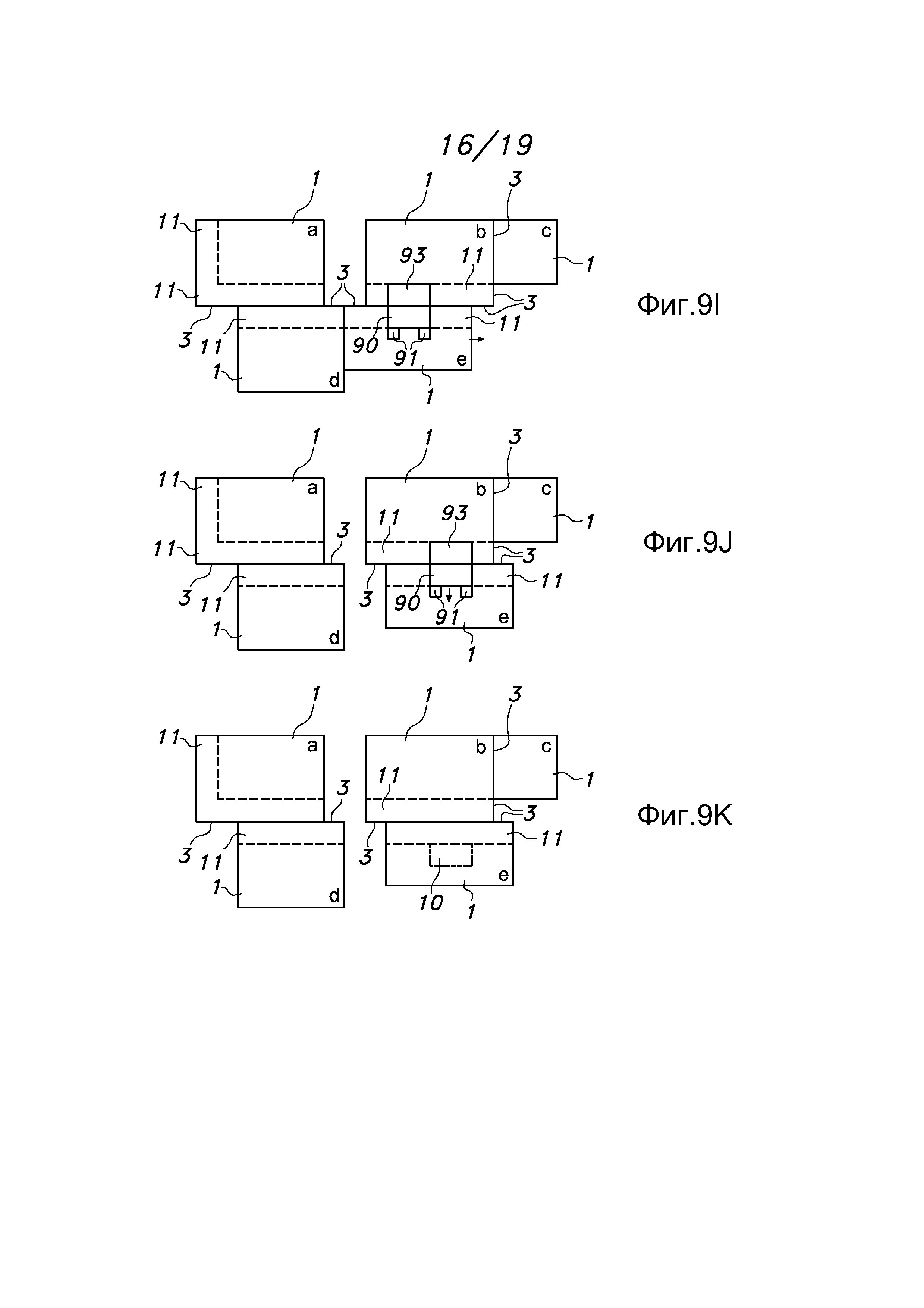
В варианте выполнения, модуль движения, также называемый общим модулем движения, может перемещаться вдоль элемента от одной грани к другой. На грани, или в положении на грани, общий модуль движения может функционально выполнять свою функцию модуля движения. При перемещении вдоль элемента от одной грани к другой, центральная точка элемента может остаться в покое. В варианте выполнения, общий модуль движения может даже перемещаться от одного элемента к следующему элементу, в частности к смежному элементу.
Общий модуль движения в варианте выполнения зацепляет модуль направления движения. Таким образом он использует приспособления в или на элементе, которые уже присутствуют. Если, например, элементы снабжены направляющими, части для зацепления модуля направления движения общего модуля движения могут зацеплять модуль направления движения. Такой модуль направления движения может, например, быть обеспечен ниже поверхности грани элемента, аналогично, например, установленной заподлицо направляющей. Это позволяет общему модулю движения смещаться ниже поверхности грани элемента.
Для того чтобы иметь возможность сместить один элемент относительно по меньшей мере одного другого элемента, общий модуль движения может содержать освобождаемую крепежную часть для крепления общего модуля движения к элементу. Освобождение крепежной части позволяет смещение общего модуля движения относительно элемента, и приведение в действие крепежной части удерживает общий модуль движения прикрепленным к элементу. Крепежная часть общего модуля движения может зацеплять элемент, например прикладыванием силы, такой как магнитная сила. Альтернативно, крепежная часть может физически зацеплять элемент. Механическая крепежная часть может взаимодействовать с взаимодействующими крепежными частями, обеспеченными в элементе. Например, общий модуль движения может содержать фиксирующий штифт, вставляющийся в фиксирующее отверстие в элементе, или наоборот, общий модуль движения может быть снабжен фиксирующим отверстием.
Для того чтобы обеспечить возможность смещения элемента, общий модуль движения может содержать часть смещения элемента. Такая часть смещения элемента зацепляет модуль направления движения на другом элементе. Часто, другой элемент является элементом, который фактически соприкасается с элементом, который (временно) вмещает общий модуль движения. Часть смещения элемента прикладывает смещающую силу к модулю направления движения другого элемента. Это может быть механическая сила, например от колеса, перемещающегося в направляющей, зубчатого колеса, перемещающегося по зубчатому рельсу, или сила, прикладываемая пьезоэлектрическими элементами. Альтернативно может быть приложена, например, магнитная сила. Часто, часть смещения элемента продолжается из грани элемента, который зацеплен общим модулем движения.
Для того чтобы сместиться вдоль элемента, или даже переместиться от одного элемента к другому, общий модуль движения содержит часть перемещения модуля движения. Эта часть перемещения модуля движения может зацеплять модуль направления движения элемента, по которому смещается общий модуль движения. В варианте выполнения, часть перемещения модуля движения является частью смещения элемента, которая отведена для работы на элементе, который использует общий модуль движения, или по или внутри которого перемещается общий модуль движения. Например, одно или более колес могут продолжаться из общего модуля движения в направлении, обращенном от элемента, таким образом позволяя зацепление смежного элемента. Эти колеса могут быть убраны для продолжения из общего модуля движения на противоположном конце, позволяя зацепление элемента, используя общий модуль движения.
Элемент может содержать один или более приспособлений для хранения общего модуля движения.
Общий модуль движения может содержать один или более функциональных частей элемента, которые упомянуты в этом описании. Общий модуль движения также может содержать по меньшей мере часть одной или более функциональных частей элемента, которые упомянуты в этом описании. Например, общий модуль движения может содержать один или более [элементов,] выбранных из группы, состоящей из устройства обработки данных, устройства хранения данных, устройства хранения энергии, устройства генерации энергии, устройства передачи данных и их комбинации. Эти устройства и/или функциональные возможности уже описаны в отношении элемента. Это может даже позволить относительно простым элементам, имеющим только пассивные функциональные части, и общим модулям движения, имеющим активные части, зацепление элемента. В варианте выполнения, элемент может содержать по меньшей мере один модуль движения, который может смещаться из функционального положения на одной грани в функциональное положение на другой грани элемента. Таким образом, элемент может быть снабжен один или более модулями движения, уменьшая сложность элемента. Теперь больше не требуется по меньшей мере один модуль движения для каждой грани элемента.
В настоящем документе, ссылка выполнена на трехмерные объекты или 3D объекты. Элементы являются трехмерными. Таким образом, простое размещение элементов вместе на плоской поверхности уже делает объект трехмерным. Однако согласно настоящему описанию, трехмерный объект относится к объекту, который состоит из соединенных элементов и продолжается по меньшей мере на два элемента в каждом пространственном направлении. Такой трехмерный объект или 3D объект будет иметь по меньшей мере 4 элемента. Фактически, три элемента уже могут образовать 3D объект, когда один или более элементов находятся вне плоскости относительно других элементов.
В общем, элементы могут содержать одну или более граней, которые могут быть определены как “полярные”. Предположим, что один тип грани может быть определен как имеющий свойство “положительный”, и другой тип грани может иметь свойство “отрицательный” относительно по меньшей мере одного из модуля движения, модуля ограничения движения, модуля направления движения. Теперь предположим, что положительная грань может соединяться и смещаться только по отрицательной грани. При использовании таких элементов, в общем порядок элементов друг относительно друга становится важным при составлении или возведении объекта из элементов. В общем описании, элемент содержит по меньшей мере одну грань, которая содержит по меньшей мере одну зеркальную симметрию относительно по меньшей мере одной грани другого элемента в части по меньшей мере одного, выбранного из модуля движения, модуля направления движения и модуля ограничения движения, когда обращен к этой другой грани. Эти симметрии могут быть названы межгранной симметрией. В варианте выполнения, по меньшей мере одна грань содержит по меньшей мере одну зеркальную симметрию относительно по меньшей мере одной другой грани в части его формы. Таким образом, два элемента имеют по меньшей мере одну ориентацию друг относительно друга, в которой они имеют соответствующую грань и в которой эти грани подходят друг к другу, могут быть прикреплены друг к другу и перемещаются или смещаются по поверхности друг друга. Для того чтобы обеспечить гибкость в создании объекта из элементов в варианте выполнения элемент содержит по меньшей мере две неполярные грани. В варианте выполнения, элемент содержит менее четырех полярных граней. Более конкретно, элемент содержит менее трех полярных граней. Конкретно, полярные грани не обеспечены на противоположных сторонах элемента.
С другой стороны, элементы могут содержать одну или более граней, которые имеют зеркальную симметрию в отношении модулей движения, модулей ограничения движения и/или модулей направления движения в одной или более плоскостях симметрии, перпендикулярных грани или граням. Таким образом, степень внутриграневой симметрии может быть обеспечена. При использовании таких элементов, элементам для соединения с такими гранями или смещения по таким граням требуется только надлежащая угловая ориентация относительно оси вращения, перпендикулярной этим граням. Когда имеется зеркальная симметрия в двух перпендикулярных плоскостях симметрии, тогда соединение становится еще проще. Когда соответствующие грани являются, например, квадратными, и эти две плоскости симметрии проходят через центр квадрата, тогда две квадратные грани всегда соединяются точно друг на друге. Таким образом, увеличение симметрии грани относительно ее модуля движения и/или его модуля ограничения движения и/или его модуля направления движения уменьшает необходимость в проверке угловой ориентации элементов друг относительно друга. Это вновь увеличивает гибкость при возведении объекта из элементов.
В варианте выполнения, по меньшей мере одна грань элемента имеет зеркальную симметрию в плоскости симметрии, перпендикулярной грани и проходящей через центр грани. В частности, грань имеет зеркальную симметрию в двух плоскостях симметрии, которые перпендикулярны друг другу и грани. В варианте выполнения, симметрия формы грани и симметрия по меньшей мере одного из модуля движения, модуля направления движения и модуля ограничения движения совпадает.
Изобретение дополнительно относится к игре, содержащей изменение формы объекта из элементов из первой формы во вторую форму, в которой положение по меньшей мере одного элемента относительно по меньшей мере одного другого из упомянутых элементов изменяется во время изменения формы.
Элементы могут фактически образовать конструктивные элементы для сборки физической конструкции, например здания, дома или подобного. С этой целью одна или более симметрий формы элемента упрощает конструирование объекта из элементов.
Наиболее известным типом симметрии является геометрическая симметрия. Геометрический объект называют симметричным, если после его геометрического преобразования он сохраняет некоторые свойства первоначального объекта.
Наиболее распространенной группой преобразований является евклидова группа изометрических, или сохраняющих расстояние преобразований, в двухмерном (геометрия на плоскости) или трехмерном (геометрия в пространстве) евклидовом пространстве. Эти изометрии состоят из отражений, вращений, переносов и комбинаций этих базовых операций. При изометрическом преобразовании, геометрический объект симметричен, если преобразованный объект конгруэнтен первоначальному. Для простого образования объекта элементами, в варианте выполнения элементы симметричны при по меньшей мере одном изометрическом преобразовании.
В варианте выполнения, элементы имеют форму для обеспечения замощения в по меньшей мере двух измерениях. Более строго, замощение или тайлинг является разделением евклидовой плоскости на конечное количество закрытых наборов, называемых плитками, так что плитки пересекаются только на их границах. Эти плитки могут быть многоугольными или любой другой формы. Множество замощений выполнены из конечного количества протоплиток; все плитки в замощении конгруентны одной из данных протоплиток. Если геометрическая форма может быть использована в качестве протоплитки для создания замощения, говорят что форма замащивает или выкладывает плоскость, или, используя элементы, пространство. Некоторые многоугольники могут быть уложены в обычную модель кристалла, чтобы заполнить (или выложить) трехмерное пространство, включая в себя куб (единственный обычный многогранник, способный сделать это); ромбический додекаэдр; и усеченный октаэдр.
Чтобы сделать укладку и образование трехмерного объекта возможным, без необходимости контроля ориентации элемента, элементы имеют идентичную форму и имеют форму, которая позволяет заполнение пространства. В двух измерениях, тайлинг относится к заполнению плоскости идентичными фигурами или набором фигур. В настоящем описании, элементы являются трехмерными и в варианте выполнения имеют форму, позволяющую по существу бесшовное заполнение пространства. Это также называется замощение. В простом примере, идентичные кубы легко заполняют пространство. В общем, могут быть обеспечены, например, многоугольники, которые позволяют заполнить пространство. По существу, в математике, такие формы известны. Заполняющий пространство многогранник, иногда называемый плезиогранник (Grünbaum и Shephard 1980), является многогранником, который может быть использован для создания замощения пространства. Замощения в трех измерениях также называют сотами.
В некоторой литературе утверждается, что куб является единственным платоновым телом, обладающим таким свойством (например, Gardner 1984, pp. 183-184). Однако существуют другие идентичные формы, которые позволяют замощение. Это можно просто доказать, разрезав куб на регулярные части. С другой стороны или дополнительно, комбинация тетраэдров и октаэдров действительно заполняет пространство (Steinhaus 1999, p. 210; Wells 1991, p. 232). Кроме того, октаэдры, усеченный октаэдр и кубы, объединенные в соотношении 1:1:3, также могут заполнять пространство (Wells 1991, p. 235). В 1914, Föppl обнаружил заполняющее пространство сочетание тетраэдров и усеченных тетраэдров (Wells 1991, p. 234).
Похоже, что существует всего пять заполняющих пространство выпуклых многоугольников с правильными гранями: треугольная призма, шестигранная призма, куб, усеченный октаэдр (Steinhaus 1999, pp. 185-190; Wells 1991, pp. 233-234) и жиробисфастигиум (Johnson 2000). Ромбический додекаэдр (Steinhaus 1999, pp. 185-190; Wells 1991, pp. 233-234) и вытянутый додекаэдр и сплющенный додекаэдр, появляющийся в сферической упаковке, также являются заполняющими пространство (Steinhaus 1999, pp. 203-207), как любая не пересекающая сама себя четырехугольная призма. Куб, шестигранная призма, ромбический додекаэдр, вытянутый додекаэдр и усеченный октаэдр все являются «основными» параллелоэдрами (Coxeter 1973, p. 29).
В период с 1974 по 1980 годы, Michael Goldberg делал попытки исчерпывающей каталогизации заполняющих пространство многоугольников. Согласно Goldberg, существует 27 отдельных заполняющих пространство гексаэдров, охватывающих все 7 гексаэдров, за исключением пятиугольной пирамиды. Из 34 гептаэдров, 16 являются заполняющими пространство, которые могут заполнить пространство по меньшей мере 56 различными способами. Октаэдры могут заполнить пространство по меньшей мере 49 различными способами. В работах до 1980 года, существует сорок 11-гранников, шестнадцать додекаэдров, четыре 13-гранников, восемь 14-гранников, ни одного 15-гранника, один 16-гранник первоначально обнаруженные Föppl (Grünbaum и Shephard 1980; Wells 1991, p. 234), два 17-гранника, один 18-гранник, шесть икосаэдров, два 21-гранника, пять 22-гранников, два 23-гранника, один 24-гранник и считающийся наибольшим 26-гранник. Затем в 1980 году, P. Engel (Wells 1991, pp. 234-235) обнаружил в целом еще более 172 заполняющих пространство с от 17 до 38 гранями, и еще больше заполняющих пространство были найдены впоследствии. P. Schmitt обнаружил заполняющий пространство невыпуклый апериодический многоугольник примерно в 1990 году, и выпуклый многогранник, называемый бипризмой Schmitt-Conway, который заполняет пространство только апериодически был найден J. H. Conway в 1993 году (Eppstein). Таким образом, математическое замощение является сложным. В настоящем изобретении, в варианте выполнения существенного замощения может быть уже достаточно. В варианте выполнения, элементы могут быть снабжены уплотняющими приспособлениями, которые позволяют заполнение оставшихся пространств между элементами.
Элементы могут быть объединены в объект путем размещения элементов друг на друге. Элементы также могут или дополнительно удерживаться вместе, позволяя по меньшей мере некоторым элементам в объекте притягивать другие элементы в объекте. При объединении элементов в объект, элементы могут быть размещены по существу друг на друге. Таким образом, элементы могут совмещаться в трех измерениях.
Альтернативно, например для обеспечения большего сцепления, элементы могут быть объединены с перевязкой. Например, в двух измерениях (фактически, одномерных), в ложковой перевязке, или другой известной перевязке. Эти перевязки в общем известны специалистам. Эти перевязки также могут быть обобщены в трех измерениях. Таким образом, грани могут перекрываться частично в одном направлении. В других двух направлениях, элементы совмещены. Перевязки также могут быть разработаны в двух направлениях. Таким образом, создаются плоскости элементов. Перевязки могут быть даже разработаны в трех направлениях, создавая трехмерную перевязку. Грани могут, например, перекрываться только угловыми частями.
В элементах настоящего изобретения, в варианте выполнения все элементы имеют одинаковую форму, позволяя им существенно заполнять пространство. Зазоры могут оставаться. В таких случаях, элементы могут быть снабжены уплотняющими зазоры приспособлениями. В варианте выполнения, чтобы позволить элементам смещаться друг относительно друга без помощи со стороны дополнительных элементов, элементы содержат модули движения, модули направления движения и модули ограничения движения на каждой грани.
Вышеописанные межгранная симметрия и внутригранная симметрия могут быть объединены. Более того, эти граненые симметрии могут быть объединены с формами, и выше. Таким образом, граненая симметрия и симметрия формы могут обеспечивать дополнительную гибкость при управлении, смещении и возведении объектов.
В варианте выполнения, модуль движения, модуль направления движения и модуль ограничения движения выполнены таким образом, что элемент, который имеет два противоположных соседа, перемещается относительно этих соседей в направлении от этих соседей, в то время как эти соседи сохраняют свое положение. В частности, это имеет место, когда элемент был первоначально соединен с его соседями. До перемещения от или смещения, элемент отделяется от смежных элементов. Более конкретно, элемент выполнен таким образом, что он окружен по меньшей мере четырьмя смежными элементами, окружающими элемент и первоначально соединенными с элементом, чтобы переместиться в направлении от смежных элементов. Это наиболее простое описание, основанное на элементах, которые имеют форму блока и имеют одинаковый размер.
Предположим, что 9 элементов в форме блока образуют блочный объект из 3x3 элементов. Элементы находятся в соприкосновении гранями, и модули ограничения движения соединяют соответствующие элементы из 9 элементов таким образом, что они образуют один объект в форме блока. Тогда имеется один центральный элемент, который имеет 4 элемента, которые находится в соприкосновении гранями с центральным элементом, и эти четыре элемента являются «угловыми элементами». Если центральный элемент требуется или необходимо переместить из блока 3x3, в то время как другие элементы остаются соединенными и на месте, центральный элемент необходимо сместить в направлении, которое перпендикулярно плоскости объекта. В таком случае, например, модули ограничения движения соответствующих элементов могут быть приведены в действие таким образом, что центральный элемент больше не будет соединен с другими элементами. Теперь, модули движения могут быть приведены в действие для перемещения центрального элемента.
Элементы являются, например, симметричными, например, имеющими три перпендикулярные плоскости симметрии. Когда элементы имеют форму блока, возможна простая укладка.
Специалисту в данной области техники будет понятен термин «по существу» в этой заявке, например, в «по существу охватывает» или в «по существу продолжается до». Термин «по существу» также может включать в себя варианты выполнения с «целиком», «полностью», «все» и так далее. Следовательно, в вариантах выполнения прилагательное по существу также может быть удалено. Где применимо, термин «по существу» также может относится к 90% или более, например, 95% или более, особенно 99% или более, еще более особенно 99,5% или более, включая в себя 100%. Термин «содержать» включает в себя также варианты выполнения, в которых термин «содержит» означает «состоит из».
Более того, термины первый, второй, третий и подобные, если используются в описании и в формуле изобретения, используются для проведения различия между аналогичными элементами и необязательно для описания последовательный или хронологический порядок. Ясно, что термины, используемые таким образом, являются взаимозаменяемыми при соответствующих обстоятельствах, и что варианты выполнения изобретения, описанные здесь, выполнены с возможностью работы в других последовательностях, чем описано или изображено здесь.
Среди других здесь во время работы описаны конструктивные элементы. Как ясно специалисту в данной области техники, изобретение не ограничено способами работы или устройствами в работе.
Отметим, что вышеупомянутые варианты выполнения иллюстрируют, а не ограничивают изобретение, и что специалисты в данной области техники будут способны выполнить множество альтернативных вариантов выполнения без отступления от объема прилагаемой формулы изобретения. В формуле изобретения, любые ссылочные позиции, заключенные в скобки, не должны толковаться ограничивающими пункт формулы изобретения. Использование глагола «содержать» и его спряжений не исключает присутствия элементов или этапов, отличных от элементов и этапов, описанных в пункте формулы изобретения. Артикль «a» или «an», предшествующий элементу, не исключает присутствия множественного числа таких элементов. Изобретение может быть осуществлено посредством оборудования, содержащего несколько отдельных элементов, и посредством подходяще запрограммированного компьютера. В пунктах формулы изобретения на устройство или аппарат, перечисляющих несколько средств, несколько из этих средств могут быть осуществлены одним и тем же элементом оборудования. Только то, что некоторые меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована для преимущества.
Дополнительные описанные признаки могут позволить увеличить сложность системы, или могут позволить элементам функционировать более или менее автономно. Элементы могут группироваться для решения задач, возможно признаками, которые имеют все элементы, или используя один или более признаков, которыми обладает только один или часть элементов.
Изобретение дополнительно относится к конструктивным элементам или их частям, содержащим один или более отличительных признаков, описанных в описании и/или показанных на сопровождающих чертежах. Изобретение дополнительно относится к способу или процессу, содержащему один или более отличительных признаков, описанных в описании и/или показанных на прилагаемых чертежах.
Различные аспекты, описанные в этом патенте, могут быть объединены, для того чтобы обеспечить дополнительные преимущества. Более того, некоторые из признаков могут образовывать основу для одной или более выделенных заявок.
Краткое описание чертежей
Варианты выполнения изобретения теперь будут описаны, только в качестве примера, со ссылкой на сопровождающие схематичные чертежи, на которых соответствующие ссылочные позиции обозначают соответствующие части, показывающие вариант выполнения конструктивного элемента, и на которых:
Фигуры 1A-1F вид в перспективе, показывающий несколько последовательных этапов примера взаимного смещения трех элементов;
Фигуры 2A-2E вид в перспективе нескольких последовательных этапов другого примера взаимного смещения в этом случае четырех кубических элементов;
Фигуры 3A-3P вид в перспективе нескольких последовательных этапов другого примера взаимного смещения в этом случае 18 кубических элементов, и на Фигурах 3N-3P - 26 элементов;
Фигуры 4A-7D относятся к различным возможным модулям движения, модулям направления движения, модулям ограничения движения и их комбинациям, на которых в частности:
Фигуры 4A-4L показывают объединенный модуль движения, модуль направления движения и модуль ограничения движения;
Фигуры 5A-5C показывают модуль движения, основанный на магнитных силах;
Фигуры 6A-6D показывают отдельный модуль движения и модуль направления движения;
Фигуры 7A-7D показывают альтернативную комбинацию модуля движения, модуля направления движения и модуля ограничения движения, основанных на пьезоэлементах;
Фигура 8 показывает схематичный чертеж, показывающий модули, которые могут присутствовать в элементе, и соединение между модулями;
Фигуры 9A-9K показывают использование отдельного, общего модуля движения;
Фигуры 10A-10H показывают модуль движения, который может изменять свою ориентацию в пределах элемента;
Фигура 11 показывает элемент, который собираются захватить или который только что был освобожден из захвата.
Чертежи необязательно выполнены в масштабе.
Описание предпочтительных вариантов выполнения
В этом подробном описании вариантов выполнения, элементы имеют общую ссылочную позицию 1, и будут по отдельности обозначены буквами «a», «b», … для того чтобы отличить их друг от друга. В описании, ссылочная позиция 1 будет опускаться при ссылке на элемент «a», «b» и так далее. Элементы a, b, … могут быть идентичны. Они также могут отличаться по форме или функционалу. Элементы имеют центр 2 (обозначено только для элемента b на фигуре 1A). Этот центр может в общем являться центром масс (также называемым «центром силы тяжести»), или альтернативно геометрическим центром (также называемым «центроидом») объекта. Если элемент имеет равномерную плотность, центр масса совпадает с центроидом.
Каждый элемент 1 может иметь одну или более граней 3, которые выполнены с возможностью обеспечения расположения элемента 1 на или к другому элементу 1. В частности, одну или более граней 3 могут быть выполнены с возможностью обеспечения смещения элементов 1 друг относительно друга, причем поверхности граней 3 находятся в соприкосновении или практически в соприкосновении. Однако в этом подробном описании другие возможности также будут показаны.
Сначала будут показаны некоторые примеры элементов и смещения элементов друг относительно друга.
На фигурах 1A-1F, три элемента a, b, и c имеют треугольную форму. В этом варианте выполнения, каждый элемент 1 имеет по меньшей мере одну грань 3 с поверхностью, которая позволяет элементам находиться в соприкосновении друг с другом и смещаться друг относительно друга по поверхности этих граней 3. Таким образом по меньшей мере одна грань 3 элементов 1 имеет поверхность 3, которая выполнена с возможностью обеспечения смещения элемента a, b, c по другому элементу a, b, c. В элементе b обозначен центр 2. Для описания, природа этого центра 2 не важна: центр 2 имеет фиксированное положение в его соответствующем элементе 1.
Фигуры 1A-1F показывают пример шести последовательных этапов элемента c относительно элементов a и b. Элементы a и b остаются в том же положении и ориентации друг относительно друга.
На фигуре 1A, изображены начальные положения элементов a-c. Элемент c начинает перемещение из положения, в котором он соприкасается только с поверхностью одной грани элемента a. Элемент c начинает перемещаться вправо на чертеже. На фигуре 1B, элемент c перемещается вправо и располагается между элементами a и b, и продолжает перемещаться вправо на чертеже. На фигуре 1C, элемент c больше не соприкасается с элементом a, элемент c теперь соприкасается только с поверхность грани 3 элемента b. Элемент c продолжает перемещаться вправо по поверхности грани 3 элемента b, и на фигуре 1D он прибывает к концу поверхности грани 3 элемента b. Элемент c способен перемещаться вправо и на фигуре 1E он прибывает в показанное положение. В этом положении, половина площади поверхности грани 3 соприкасается с поверхностью грани 3 элемента b. Элемент b теперь начинает перемещение в направлении в чертеж и перпендикулярно предыдущему направлению.
На фигуре 1F, элемент c показан в покоящемся положении. В этом положении, поверхность грани 3 только частично соприкасается с поверхностью грани 3 элемента b.
В примере с фигур 1A-1F, элементы a-c прикладывают силы друг к другу, используя модули движения, модули направления движения и/или модули ограничения движения. Эти силы могут быть приложены механически, используя электромагнитные силы, используя химические силы и любые другие физически силы или их комбинацию. В случае химической силы, возможное использование обратимой реакции, которая, например не оставляет следов на поверхности, может продлить возможность использования для будущего перемещения вдоль такой поверхности. При описании фаз перемещения, следует понимать, что перемещение может отличаться по скорости и ускорению. Возможна даже прерывистая последовательность перемещения, отсутствия перемещения и вновь перемещения. При перемещении или отсутствии перемещения, элемент может выдерживать одну или более сил, прикладываемых к этому элементу (изнутри или снаружи), выбранных из группы, состоящей из, например, гравитационной силы, механической силы, электрической силы, химической силы и климатических сил. Возможно использование элемента, например, на другой планете, в текучей среде или в вакууме, таком как открытый космос.
Альтернативно, элемент c удерживается на элементах a и b посредством механического средства или посредством, например, магнитной силы. В этом примере, поверхности граней 3 элементов a-c могут фактически соприкасаться друг с другом. Ниже показаны различные варианты выполнения модулей движения, модулей направления движения и модулей ограничения движения и которые могут быть использованы для перемещения, показанного на фигурах 1A-1F.
В примере с фигур 2A-2E, показаны четыре элемента 1, обозначенные a-d. Эти элементы a-d смещаются друг относительно друга. Элементы 1 в этом пример являются идентичными кубами. В этом примере, грани кубов являются сплошными поверхностями и кубы опираются на сплошные поверхности друг друга и могут находиться под действием гравитационного поля. Начальное положение элементов a-d показано на фигуре 2A. Если действие смещения, показанное на фигурах 2A-2E, будет повторено, конструкция из четырех элементов a-d переместится вправо как единое целое.
На фигуре 2A, элемент начинает смещение вдоль поверхности грани 3 элемента b в направлении вверх. Элемент a таким образом смещается по направлению к элементу d. Фактически, центр 2 элемента a перемещается от центра элемента b и становится ближе к центру элемента d, когда он перемещается в направлении вверх.
На фигуре 2B, элемент a прибывает в положение, наиболее близкое к центру элемента d. Элемент a теперь больше не соприкасается с элементом b. Теперь, элементы a и d вместе начинают смещение вправо на чертеже. Это может быть выполнено несколькими способами: элемент a может соединиться с элементом d, и модуль движения либо элемента d, либо элемента b начинает действовать на элемент d в направлении (предполагаемого) перемещения. Это приводит к перемещению элементов a и d. Когда элементы a и d сместились настолько вправо, что поверхность грани 3 элемента теперь соприкасается с частью грани 3 элемента b. Теперь часть модуля движения элемента a может зацепить часть модуля движения элемента b. На таком этапе, совместное перемещение элементов a и d может быть вызвано, используя модуль движения элемента a, элемента b или элемента d, или комбинации этих модулей движения.
На фигуре 2C, элементы a и d расположены точно над элементами b и c. Элементы a и d продолжают смещаться вместе вправо, до тех пор пока не будет достигнута ситуация, изображенная на фигуре 2D. Здесь элементы a и d останавливаются. Теперь, элемент d начинает смещение в направлении вниз, причем его центр перемещается от центра элемента a и по направлению к центру элемента c. Вновь, это перемещение может быть вызвано действием модуля движения элемента a, элемента c или элемента d, или объединенным усилием любого из этих модулей движения.
На фигуре 2E, элементы a-d находятся в фактически аналогичной внешней конфигурации. Таким образом, результатом является конструкция, фактически как на фигуре 2A, но смещенная вправо на величину, которая равна длине стороны элемента. После смещения элементов a-d, другой дополнительной аспект изобретения будет описан: транспортировка. Когда объект временно соединен с элементом a, например размещая контейнер с материалом на или в элемент a; элемент теперь использует свою собственную возможностью перемещения или других элементов для транспортировки этого другого объекта из одного положения в другое положение. Альтернативно, элемент может содержать встроенное пространство для хранения. Таким образом, элемент может функционально являться или содержать контейнер для удерживания материала.
На фигурах 3A-3H, конструкция из 18 элементов 1 фактически изменяет свою форму посредством перемещения элементов друг относительно друга. Все элементы имеют идентичную форму. Функционал элементов может отличаться. Таким образом, функционал новой конструкции также может отличаться.
В конструкции из 18 элементов 1, верхние 9 элементов обозначены a-i. Для того чтобы перейти к новой конструкции из этих элементов, изображенной на фигуре 3H, возможны множество схем. Фигуры 3B-3G показывают несколько промежуточных расположений элементов. Одна из этих возможных схем состоит в том, чтобы сначала сместить весь ряд d-f на две позиции влево (фигура 3C), затем сместить элемент c налево, до тех пор пока его центр не будет расположен наиболее близко к элементу e (фигура 3D), затем сместить элемент f в положение, где его центр расположен наиболее близко к центру элемента c (фигура 3E), затем сместить элементы c и f влево, до тех пор пока элементы b и c не коснуться (и могут зафиксироваться) (фигура 3F). Затем сместить элемент e вниз, до тех пор пока он не достигнет положения, показанного на фигуре 3G. Это может быть выполнено, используя [весь] (или часть) модуля движения элемента d, f, элемента ниже элемента d, и элемента e, или объединенное действие выборки из этих элементов. Далее, элемент d перемещается влево, до тех пор пока не будет достигнута конфигурация с фигуры 3H. Таким образом эта схема требует 7 шагов, смещения в целом 4 элементов (c, d, e, f) на всего 12 позиций: при переходе от фигуры 3A к фигуре 3B, возникает смещение на три позиции, от фигуры 3B к фигуре 3C - три позиции, от фигуры 3C к фигуре 3D - одну позицию, от фигуры 3D к фигуре 3E - одну позицию, от фигуры 3E к фигуре 3F - две позиции, от фигуры 3F к фигуре 3G - одну позицию, и от фигуры 3G к фигуре 3H - вновь одну позицию. Это дает в сумме 12 позиций. Та же конечная ситуация или конфигурация элементов также может быть достигнут другим образом. Это показано на фигурах 3I-3М. Для простоты понимания, фигуры 3A и фигура 3H изображены повторно на чертежах. Сначала элементы a-c смещаются вместе на один шаг вдоль элементов d-f влево, как на фигуре 3I. Далее (фиг. 3J), элемент f смещается в направление в чертеж, до тех пор пока его центр не будет расположен наиболее близко к положению центра элемента c.
Затем, на фигуре 3K элементы a-f перемещаются группой на одну позицию вправо. Альтернативно, a, b, c, f перемещаются одной группой, и d, e перемещаются второй группой. Скорости могут отличаться. Далее, элемент e перемещается вправо (фигура 3L). Фигура 3М изображает промежуточное положение элемента e во время перемещения вниз; в этом положении элемент e использует элемент f и параллельно или последовательно использует элемент слева от элемента e. Далее вновь достигается комбинация с фигуры 3H. Эта схема требует пять шагов (не считая фигуру 3М), смещения 6 элементов (a-f) на всего 12 позиций. Последняя схема может требовать меньшее количество (кинетической) энергии, например элемент d теперь был смещен всего на 1 позицию.
На фигурах 3N-3P, изображено как элемент 1 может перемещаться, когда он окружен другими элементами 1. Здесь, на фигуре 3N 26 элементов 1 собраны в один куб, с одним свободным пространством в центре правого ряда элементов 1. Таким образом 26 элементов образуют один объект: куб с одним отверстием. На фигурах 3N-3P, верхние 9 элементов 1 подняты только для целей иллюстрации. Таким образом элемент «e» на фигуре 3N находится в соприкосновении гранью с 5 другими элементами 1, включая в себя элементы «b», «d» и «h». Модуль движения, модуль направления движения и модуль ограничения движения в этом варианте выполнения позволяет элементу «e» перемещаться в положение 3O и далее в положение, показанное на фигуре 3P, в то время как другие элементы 1 остаются на своих местах. Ниже показаны несколько примеров вариантов выполнения различных модулей. Эти модули, или их варианты, позволяют элементу (или кластеру элементов), который (-рые) с нескольких сторон окружен (-ны) другими элементами, покинуть объект или сместиться в пределах объекта. В примере с фигур 3N-3P, модуль движения элемента «e» будет использовать модуль направления движения по меньшей мере одного из элементов, с которым он находится в «соприкосновении гранью». В варианте выполнения, для того чтобы предотвратить блокирование элемента «e», элемент «e» может использовать модули движения всех своих граней 3, кроме тех, которые обращены от направления перемещения, и своей грани 3, который обращен по направлению перемещения. В ситуации, когда объект подвержен действию гравитационной силы, действующей по направлению к нижней части чертежа, может быть возможным, что будет управляем только модуль движения в/на нижней грани (противоположной грани, на которой нанесено обозначение «e»). Чтобы перейти в положение, показанное на фигуре 3P, модуль движения элемента «e» в варианте выполнения последовательно использует, например, модули направления движения элемента 1 непосредственно ниже элемента «e» на фигуре 3N, и/или элемента 1 ниже элемента «e» на фигуре 3P, или комбинацию двух, если возможно. Альтернативно или в комбинации, элемент «e» также может использовать модули направления движения и/или модули движения элементов b, c, h, i, если возможно. В общем, он может использовать модули направления движения и/или модули движения элементов, соприкасающихся с элементом «e».
Сравнивая конечные положения и способы, которыми данные конечные положения были достигнуты, несколько аспектов могут быть учтены. На самом высоком уровне, может быть оценена эффективность системы элементов как единого целого. На нижнем уровне, может быть оценена эффективность группы элементов. На самом низком уровне, эффективность единственного элемента может являться предметом оценки эффективности. Эти аспекты, например, могут иметь отношение к (не)эквивалентности элементов, ограничениям элементов, принципам того, как обращаться с силами, действующими на элемент и между элементами, требуемым промежуточным положениям, принципам, используемым для навигации или решения задач, скорости, с которой достигаются некоторые конкретные конфигурации элементов, потреблению энергии.
Для достижения некоторого положения могут использоваться нечеткая логика, искусственный интеллект, методики интеллектуального анализа данных, машинное обучение, алгоритмы (поиска путей), пропорциональная логика, теория игр или другие способы, известные в области техники. Элементы могут направляться или управляться из одной или более центральных точек. Альтернативно, элементы могут быть выполнены с возможностью принятия их собственных решений. В еще одном альтернативном [варианте], элементы могут использовать распределенное управление. Таким образом, возможны несколько степеней, уровней или комбинаций между направлением или управлением и принятием собственных решений. Таким образом, элемент или группа элементов может работать автономно, например используя данные или информацию, полученную от других элементов и/или других источников. Элемент может иметь агентский функционал и может обучаться посредством обратной связи от окружающей его среды. Элемент может исследовать, посредством вычисления, несколько возможных действий или последовательность действий, которые он способен выполнить. Впоследствии элемент может определить либо для самого себя, либо для одного или более других элементов, какое действие имеет самое высокое преимущество для элемента, или для одного или более других элементов. Затем он может выбрать это действие или последовательность действий, и выполнить это действие или последовательность действий. Более того, распределение действия или последовательности действий во времени может быть учтено: элементы могут планировать их последовательность действий, в котором планирование может учитывать действия других элементов, или оно может предвосхищать действия других элементов. Элементы могут принимать только часть информации, необходимой для достижения конечной конфигурации элементов и, следовательно, должны обмениваться данными с другими элементами или устройствами. Клиент-сервер, ведущий-ведомый, равный-равному, системы с пассивным приемом или активным запросом, опрос, роение или другие (гибридные) способы/технологии могут быть использованы и адаптированы. Иногда параллельное перемещение (отдельных элементов или групп элементов) происходит вслед за последовательным перемещением. Таким образом перемещение элемента d и элемента e в их конечные положения может произойти за один шаг из фигуры 3F непосредственно в 3H одновременно, а не последовательно, как описано на настоящей фигуре 3F, за которой следуют 3G (перемещение элемента e) и 3H (перемещение элемента d). Иногда некоторая конфигурация элементов может быть достигнута только способом, в котором один элемент помогает другому элементу. Помогающий элемент может временно быть вставлен и использоваться, затем удален из других элементов и, таким образом, вообще не имеет положения в конечной конфигурации элементов. Вследствие возможности повторного использования элементов, большое количество конфигураций элементов может быть достигнуто со временем. Надлежащим образом спроектированные элементы не должны перерабатываться, а могут быть повторно использованы, даже для иных целей. Это снижает нагрузку на нашу естественную окружающую среду несколькими способами. Если элемент в объекте не функционирует надлежащим образом или вышел из строя, он может быть легко удален, например действиями других элементов, и заменен функционирующим элементом. Элемент также может быть технически обслужен.
Набор элементов может принимать первую конфигурацию и затем перемещаться друг относительно друга во вторую конфигурацию. Таким образом, набор элементов сначала имеет первую форму и затем вторую форму. Это также называется «изменение формы». В этом процессе, элементы могут быть выполнены с возможностью повторного использования.
Это изменение формы путем смещения выполненных с возможностью повторного использования элементов позволяет, например, образование стола из группы элементов. Когда на более позднем этапе этот стол больше не требуется, по меньшей мере один элемент из группы может получить команду на прикладывание некоторой формы управления над, или на сообщение с, по меньшей мере одним другим элементом группы. Это может быть непосредственным, беспроводным, но также может быть выполнено, например, элементом передачи сообщений, который может быть вставлен или добавлен и который передает сообщение элементу вне группы и затем возвращает. Таким образом задача группы элементов может содержать изменение ее текущей формы, например из стула в стол и обратно в стул.
Таким образом, элементы начинают перемещаться друг относительно друга. Констелляция элементов, которая первоначально отвечает требованиям для стула, изменяет свою форму в констелляцию, которая отвечает требованиям для стола. Констелляция элементов затем может реорганизовать сама себя, чтобы отвечать требованиям для стула согласно входному сигналу, поданному или уже доступному на элементе. Таким образом задача повторного использования элементов выполняется элементами.
Взаимодействие с человеком, прикладывающим физическое управление, например подъем, укладку или замену одного или более элементов, не требуется. Это иной способ, чем возведение конструкций из, например, Lego, в котором требуется взаимодействие человека. В этом примере ясно, что некоторые формы интеллекта или правил в отношении механизмов, конструкции, архитектуры могут применяться элементом или быть заданы элементу устройством, так что человек может фактически использовать стул, чтобы сидеть, при этом стул не распадется вследствие, например, разделения или отсоединения присоединенных элементов.
Элементы могут являться физическими в различных масштабах. Во-первых, их размеры могут отличаться. Их размеры могут быть сравнимы с игровыми блоками. Таким образом, элемент может иметь сечение в пределах 1-5 см. Элемент может являться строительным блоком для сооружения здания. В таком случае, строительный блок может иметь сечение около 5-50 см. Элементы также могут быть настолько малыми, что человеческий глаз сможет с трудом различить отдельные элементы. В таком варианте выполнения, элемент может иметь диаметр менее 1 мм. В частности, диаметр может быть менее 100 микрометров. Это может потребовать использования нанотехнологий и, например, молекулярных или атомных моторов. Эти элементы могут использоваться для создания частей этого изобретения, также как более крупные элементы размером с кирпич или сборные бетонные элементы, которые могут образовывать здание. Опуская физические качества элементов, элементы могут быть симулированы, для того чтобы определить или предположить возможно ли достичь конфигурации элементов. Для того чтобы достичь конечного состояния, начиная сначала или начального состояния, элементу может потребоваться комбинация программы или приложения, с функционалом, который позволит выполнение некоторых функций. Эти функции управляют приводами, доступными в элементе. Доступные датчики могут обеспечивать элементу или программе входной сигнал, потенциально приводящий к иному исходу функции или группы функций. Эти атрибуты и взаимодействия по существу могут быть известны в области робототехники.
Из этого можно толковать игру или симуляцию, которые могут использовать физические или воображаемые элементы или комбинацию обоих. В такой игре, задачей игрока может являться выбор правильной программы и правильной функции/функционалов, для того чтобы элементы достигли некоторого конечного состояния, отличного от начального состояния. В эту игру можно играть человеку одному или с компьютером. В нее может играть по меньшей мере один человек против по меньшей мере одного другого человека или против по меньшей мере одного другого компьютера, или их комбинации.
Конкретные параметры определяют успех; параметры, такие как потребление энергии, скорость, количество шагов отдельного элемента или группы в целом, количество использования памяти/центрального процессора, прочность конечного состояния или время, требуемое для достижения конечного состояния. При использовании этого с некоторой степенью автономности элементов и случайности, например, используя искусственный интеллект, исход может предварительно быть не известен игроку. Применение чрезмерных управляющих ограничений к элементу может ограничить возможность элемента реагировать надлежащим образом на другие ситуации/конечные состояния; также может существовать компромисс между специализацией и обобщением. Игрок может, например, сконструировать на игровом устройстве некоторое конечное состояние и наделить некоторые элементы выбранными свойствами: выбор из группы программ, приводов или модулей движения, датчиков, функций, энергетических систем и систем связи. Следует понимать, что эти свойства элемента могут воздействовать на другие элементы или устройства. Конструкция может использоваться по меньшей мере одним элементом. Конструкция обеспечена частично или в качестве единого целого для одного или более элементов, и элементы начинают смещение и, в зависимости от заданных свойств, конструкция, которая фактически является конечным состоянием, может быть достигнута или нет. Изменение конструкции позволяет элементам попытаться достичь другого конечного положения. Элементы могут быть физическими или воображаемыми и смещать сами себя согласно данным свойствам. Элементы могут быть выполнены так, чтобы элементы обменивались по меньшей мере одним свойством или функционалом друг с другом или с другим устройством. Элементы могут содержать память, для того чтобы обращаться к предыдущим ситуациям или вычислять возможные будущие ситуации. Это по существу известно в области компьютерных наук. Конечное состояние может быть задано различными способами. Например, внешние границы набора элементов могут быть использованы в качестве конечного состояния. Например, конечная форма является кубом или пластиной.
Конечное состояние может быть функционально задано на уровне элемента. Например, каждый элемент должен иметь по меньшей мере одну грань соприкасающуюся с другим элементом; каждый элемент должен иметь по меньшей мере 2 свободные грани.
Конечное состояние также может являться списком положений, абсолютных или относительных к другим элементам, элементов, или, например, определенные элементы имеют заданные крайние положения, вновь либо относительные, либо абсолютные или комбинацию обоих.
Конечное состояние также может быть представлено математической функцией, общими или математическими потребностями или требованиями при сборке элементов, например, сборка или конфигурация элементов должна иметь конкретную плоскость симметрии, полое пространство внутри, заданную окружность, заданный объем, количество слоев и так далее.
Конечное состояние также может являться функционалом. Элементы, имеющие заданный функционал или свойство, находятся в некотором положении. Или положение должно быть таким, чтобы функция была оптимизирована. Например, элементы, имеющие фотоэлектрическую грань, должны быть расположены и/или спозиционированы так, что их мощность максимальна. Конечное состояние может даже эволюционировать, изменяться или модифицироваться, даже во время перемещений элементов к первоначальному конечному состоянию. Конечное состояние может, например, измениться вследствие влияний окружающей среды, таких как дневной/световой цикл, температура и так далее, или может зависеть от времени. Конечное состояние также может являться отрицательным определением или являться исключением.
Дополнительно, внешнее взаимодействие может быть возможным. Например, вставка или удаление элемента в или из некоторого состояния. Это может быть осуществлено физически, например, человеком, используя его/ее руку. Когда это выполнено учитывая то, как элементы могут прикрепляться/взаимодействовать друг с другом, элемент, смежный с вновь добавленным элементом, может замечать/обнаруживать это взаимодействие и использовать это для своего собственного поведения и возможно для поведения других элементов при конфигурации элементов. Возвращаясь к примеру конструирования конечного состояния на устройстве, вставка или удаление по меньшей мере одного элемента может также учитываться этим устройством. Альтернативно, может использоваться предварительно сконструированное конечное состояние.
Примером этим служит ребенок, сконструировавший замок, используя элементы. Представим использование ребенком компьютерного устройства. Существует множество примеров пригодных для использования устройств. Например ручное устройство, такое как, например, ручное устройство, содержащее (сенсорный)экран. Пример такого устройства содержит смартфон, iPad, умные часы или аналогичное устройство. Эти устройства могут принимать ввод информации пользователем посредством сенсорного экрана, голосового управления, приема мышечного или нервного импульса, или другого средства ввода.
Предположим, что замок сконструирован, используя элементы. Физически, замок образован в комнате путем действия и смещения элементами самих себя. После или во время образования, ребенок расширяет замок, физически добавляя еще два элемента. Устройство может, например, содержать “приложение”, запущенное на устройстве, таком как iPad, которое принимает информацию от элемента, образующего часть замка, к которой добавлены два элемента. Ребенок может сохранить его/ее измененную версию замка. Когда игра завершена, ребенок дает команду элементам посредством приложения переместиться в некоторое начальное состояние. Такое начальное состояние может быть компактным, так чтобы его/ее комната могла использоваться для других целей. Затем этот пример может использовать беспроводную связь или множество устройств, таких как, например, множество iPad, которые используются для создания совместной конфигурации элементов даже в удаленных или необитаемых местах (например на планете Марс).
Другая цель может заключаться в следующем. Вследствие, например, смещения или изменения ориентации одного или более элементов, условия могут быть оптимизированы. Например, элементы могут оптимизировать условия произрастания растений. Это может быть достигнуто, например, физическим перемещением одного или более растений, обеспечивая тень, закрывая солнце. Две сборки элементов могут сместить два растения или группы растений друг относительно друга таким образом, что условия произрастания для обоих растений оптимальны. В варианте выполнения, элементы могут образовывать контейнер, например горшок, удерживающий растения. В таком контейнере, один или более элементов могут, например, обеспечивать отверстие в контейнере для обеспечения выхода лишней влаги из контейнера. Части контейнера могут образовывать защиту от солнца, или элементы могут полностью перемещать растение.
Связь может заменить некоторый тип функционала датчика. Элемент может использовать датчик для регистрации только своего непосредственного соседа. Альтернативно, датчик может быть способен регистрировать другой элемент на расстоянии двух позиций, или элемент может запрашивать или принимать информацию от другого элемента, если этот другой элемент соприкасается с элементом на расстоянии двух позиций. Датчики могут использовать обнаружение контакта/приближения, используя электромагнитный или звуковой спектр.
Другим примером является ситуация, когда два пользователя играют в игру, например, на двух отдельных устройствах, например на двух iPad, два пользователя играют в игру, в которой физическое или виртуальное достижение некоторого заданного конечного состояния является целью игры. Как описано ранее, это может быть выполнено путем выбора правильных свойств, функционала или инструментов для элементов. В этой игре могут существовать ограничения на некоторые свойства или ограничения на то, какое количество различных конфигураций элементов может быть использовано для некоторого конечного состояния при прохождении уровня этой игры. Подход, схожий с программой Minecraft или другими воображаемыми мирами, может быть выполнен, с тем, например, отличием, что настоящие элементы могут физически построить то, что виртуально спроектировано при использовании правил проектирования, действующих для физического элемента.
На фигурах 4A-7C изображены различные варианты выполнения модулей движения, модулей направления движения и модулей ограничения движения. Эти варианты выполнения являются примерами, показывающими способы работы изобретения для физических элементов 1.
На фигурах 4A-4C показаны вид в сечении, увеличенная часть и вид сверху, которые изображают механическое решение, которое объединяет модуль движения, модуль ограничения движения и модуль направления движения. На фигуре 4B показано сечение частей из двух элементов 1, 1’, которые расположены друг на друге. Грани 3 практически соприкасаются. Фактически, если их поверхности практически не имеют трения, поверхности могут фактически соприкасаться. В противном случае, один из трех модулей (движения, направления движения и ограничения движения) будет вызывать наличие небольшого расстояния между гранями 3.
В варианте выполнения с фигур 4A-4C, схематично показан вариант выполнения части из двух элементов 1. Часть модуля 10 движения элемента 1 является убираемым колесом. Другая часть модуля движения является частью направляющей 11, которая обеспечивает поверхность зацепления обода убираемого колеса. Направляющая 11 дополнительно обеспечивает часть модуля направления движения и модуля ограничения движения.
Элемент 1’ имеет в этом варианте выполнения одинаковые модули. Фигура 4A показывает один элемент на виде сверху, и фигура 4B показывает сечение с фигуры 4A как обозначено, но со вторым элементом на нем и также вид в сечении.
На фигуре 4B, убираемое колесо элемента 1 продолжается и зацепляет модуль направления движения элемента 1’, здесь направляющую 11’ элемента 1’. Убираемое колесо 10’ элемента 1’ находится здесь в его убранном положении. Убираемое колесо 10 элемента 1 в его выдвинутом положении зацепляет направляющую 11’. В элементе 1, для того чтобы не препятствовать убираемому колесу 10, подвижная крышка 12 находится в ее нерабочем положении. Здесь она скользит вправо на чертеже. Подвижная крышка 12’ элемента 1’ закрыта. В этом варианте выполнения, крышка 12’ вместе с направляющей 11 обеспечивает непрерывную направляющую. Направляющая 11 утоплена относительно поверхности или грани 3. На фигуре 4C модуль движения показан более подробно. Модуль 10 движения содержит убираемые колеса, содержащие кронштейн 18, соединенный с валом 16, который перпендикулярен кронштейну 18. В этом варианте выполнения, вал 16 несет колесо 17. Здесь приводным двигателем для колеса 17 служит электромотор 19, который может быть обеспечен в виде ободного двигателя внутри колеса 16. Альтернативно, электромотор может быть обеспечен в вале 16. Здесь на противоположных концах вала 16, обеспечены части 15 модуля ограничения движения, которые могут быть выдвигаться и убираться в осевом направлении вала 16. В выдвинутом положении, он может зацеплять желоб 14 (фигура 4B), и в убранном положении модуль 10 движения может быть убран.
На фигуре 4A показана только одна грань элемента. В варианте выполнения, части которого уже описаны выше, элемент 1 может являться кубом. Такой куб может быть снабжен шестью аналогичными гранями. Фактически, шесть граней также могут быть идентичны. В варианте выполнения с фигуры 4A, грань несет крестообразную направляющую. Здесь, центр креста расположен в центре грани. В варианте выполнения, элемент может иметь дополнительные грани, которые снабжены аналогичной, крестообразной направляющей. Для того чтобы элементы имели возможность гибкого смещения друг относительно друга, направляющая на одной стороне функционально соединена с направляющей на другом, смежной грани. В примере с фигуры 4D элемент 1 имеет одну единственную, закрытую, утопленную направляющую, которая проходит по всем четырем сторонам или граням элемента 1. На этом чертеже, желоб 14 отличается от варианта выполнения с фигур 4A и 4B. Одна из стенок желоба 14 проходит одинаково с поверхностью направляющей 11. В варианте выполнения с фигуры 4A, элемент имеет по меньшей мере две направляющие. Эти направляющие имеют два пересечения на противоположных гранях, и на фигуре 4A видно одно из пересечений.
Теперь представим два элемента 1 типа, показанного на фигуре 4A, которые расположены так, что их грани соприкасаются. Для того чтобы третьему элементу, имеющему колесо, как показано на фигуре 4B, переместиться по грани одного элемента 1 и продолжить по смежному элементу 1, аналогичный смежный элемент должен иметь аналогичную утопленную направляющую на том же уровне, чтобы позволить перемещающемуся модулю пройти два зазора (каждый элемент образует один зазор. Его также можно рассматривать в качестве одного единственного зазора). Фигуры 4E-4L схематично изображают 3 элемента 1; a, b и c, в сечении, [проходящем] параллельно через центр направляющих элементов. Зазоры в линиях походят на зазоры с фигуры 4D закрытой направляющей вокруг элемента. Фигура 4E показывает, что выдвинутый колесный модуль 10 элемента «a» перемещается в направляющей элемента «b». Фигура 4F изображает ситуации, в которой колесный модуль 10 пытается пройти первый зазор. Очевидно, что отсутствует сцепление, посредством которого колесный модуль может самостоятельно сместить элемент «a» насколько-нибудь дальше в направлении элемента c. Один или более вспомогательных элементов 1, прикрепленных к элементу 1 «a», могут в этом случае решить эту задачу. Возможно, элемент 1 с фигуры 4D имеет иной модуль 10 движения: модуль 10 движения со множеством колес (Фигура 4G). Сначала такой модуль 10 движения выдвигается по направлению к направляющей. Затем модуль 10 движения увеличивает длину своей колесной базы, и два колеса будут следовать по направляющей. В этом варианте выполнения, рама, соединяющая обе оси колес, выдвигается. Колеса на фигурах 4G и 4H могут иметь половину ширины одного колеса с фигуры 4E. Таким образом, эти колеса, в случае варианта выполнения с фигуры 4G и 4H, могут выдвигаться друг из друга и умещаться в направляющей. Расстояние между осями вращения этих двух колес таково, что два колеса перекрывают два зазора, которые изображены на фигуре 4H: Когда одно колесо не имеет сцепления, другое колесо имеет сцепление. Расстояние между осями вращения двух колес может быть задано. Эти два колеса могут быть совместно или независимо друг от друга использовать моторизованную часть.
В другом варианте выполнения, множество модулей 10 движения обеспечены на некотором расстоянии друг от друга. Это обеспечивает перемещение, в то время как один из модулей 10 движения пересекает два зазора, и другой модуль 10 движения перемещается по направляющей 11 (фигура 4I-4L).
Фигура 4I показывает элемент 1, имеющий два разнесенных модуля 10 движения, которые перемещают элемент a по элементу b и по направлению к элементу c. На фигуре 4J правое колесо не имеет больше сцепления вследствие первого зазора. Левое колесо использует свою мощность, чтобы продолжить смещение элемента a. На фигуре 4K второй зазор достигнут. По-прежнему, левое колесо зацепляет элемент b и толкает элемент a дальше по направлению к элементу c. В ситуации на фигуре 4L, оба колеса вновь имеют сцепление: причем левое колесо зацепляет элемент «b», и правое колесо зацепляет элемент «c». Колеса могут изменить роли, если элемент «a» находится полностью на элементе «c».
В варианте выполнения кубического элемента, фактически обеспечены три непрерывных направляющих, которые опоясывают куб и которые пересекаются друг с другом. Каждая направляющая обычно пересекается другую направляющую в двух местах пересечения. Фактически возможно большее число направляющих, при этом каждая имеет другие преимущества. В частности, будет показан вариант выполнения, в котором одна или более направляющих могут быть выполнены на грани в практически каждом выбранном пути на грани. В этом документе, такой вариант выполнения обеспечен, используя магнитные части. Другие конкретные компоновки направляющей, которые упомянуты здесь, обеспечивают грань двумя наборами из двух направляющих. Каждый набор пересекает другой набор. Направляющие набора могут быть обеспечены симметрично относительно центра грани. Таким образом, фактически направляющие уложены в форме знака #. В частности, два набора параллельных направляющих перпендикулярны друг другу. При обеспечении крестообразной направляющей, элемент, в частности когда он является кубом, обычно может перемещаться только по другому элементу, когда грани обоих элементов, обращенные друг к другу, параллельны направлению перемещения. В частности, эти грани лежат в одной плоскости. Таким образом, когда требуется другое перемещение, может потребоваться помощь другого элемента. Преимуществом крестообразной направляющей является относительно простая компоновка. Более того, перемещение может быть обеспечено, используя единственный модуль движения на каждой грани, в месте пересечения направляющей. Таким образом, в варианте выполнения куба, шесть модулей движения могут потребоваться для обеспечения возможности полноценного перемещения. В варианте выполнения с фигуры 4A, каждая направляющая 11 снабжена четырьмя модулями движения. Это может потребоваться для обеспечения достаточного сцепления, мягкого перемещения. Другие расположения модулей движения в направляющей возможны, и другое количество модулей движения на одну направляющую может быть использовано. В простом варианте выполнения, уже упомянутом, одного модуля движения в месте пересечения направляющей может быть достаточно при некоторых условиях.
Фигура 4B показывает на схематичном сечении вариант выполнения, в котором модуль 10 движения показан более подробно. В этом варианте выполнения, часть модуля 10 движения находится на выдвижном приводном блоке, который может перемещаться вверх и вниз относительно грани 3, 3’. Он может быть убран, оставляя грань 3 свободной, и он может быть выдвинут, для того чтобы продолжаться за поверхность грани 3 и зацеплять направляющую 11 другого элемента.
В этом варианте выполнения, множество способов могут быть выведены для обеспечения модуля ограничения движения. Более того, множество способов могут быть найдены для обеспечения модуля направления движения. В этом варианте выполнения, показано механическое решение. Таким образом, часть модуля ограничения движения и модуля направления движения обеспечены, используя набор желобов 14 с обеих сторон направляющей 11. Здесь желоба 14 обеспечивают противоположные перпендикулярные опоры, работающие вдоль линии, перпендикулярной грани элемента, и противоположные поперечные опоры, работающие вдоль линии [, лежащей] в одной плоскости с гранью и перпендикулярной направляющей. В простом варианте выполнения, желоба 14 имеют прямоугольное сечение. Здесь желоба параллельны грани и параллельны направляющей 11. Таким образом, желоба 14 обеспечивают часть модуля ограничения движения и модуля направления движения. Фактически, желоба 14 можно рассматривать как частично выточенные желоба, содержащие выточку на обеих противоположных продольных сторонах желоба 14.
В этом варианте выполнения, другая часть модуля ограничения движения и модуля направления движения выполнена посредством частей 15, проходящих в желобах 14. Части 15 проходят в желобах 14 и обеспечивают опоры в желобах 14. Различные принципы, показанные здесь, могут быть объединены.
На фигурах 5A-5C показаны альтернативный вариант выполнения модуля движения, модуля направления движения и модуля ограничения движения. Этот вариант выполнения показывает вариант выполнения, который исключает механические средства для выполнения модуля движения, модуля направления движения и модуля ограничения движения. Части немеханического варианта выполнения и механического варианта выполнения могут быть объединены. Этот вариант выполнения использует магнитную силу. С этой целью, постоянные магниты и переключаемые магниты могут быть объединены.
Следующий вариант выполнения может быть выполнен в элементе. На фигуре 5A, оба элемента 1, 1’ содержат по меньшей мере одну ленту из магнитов 40, которые могут быть включены и выключены. Таким образом, части в ленте могут быть выборочно приведены в действие. Таким образом, ленты в двух элементах могут вместе образовать распределенный линейный двигатель. Фактически, принцип линейного двигателя по существу известен в данной области техники. В этом вариант выполнения, такой линейный двигатель разделен на две отдельные части. Это позволяет двигателю выполнять функцию модуля движения. Используя магнитную силу, противоположные ленты 10, 10’ в двух элементах, которые расположены друг на друге, причем их ленты расположены друг над другом, могут даже обеспечить по меньшей мере часть модуля направления движения.
В этом варианте выполнения, дополнительные ленты могут быть обеспечены на поверхности элемента. В варианте выполнения, две ленты могут быть обеспечены в/на грани элемента. Эти ленты могут быть по существу параллельны. Таким образом, ленты могут выполнять функцию модуля движения и модуля ограничения движения. В варианте выполнения, два элемента 1, 1’ расположены друг на друге. Оба элемента содержат две ленты из выборочно приводимых в действие магнитов 40 и которые параллельны друг другу. Более того, ленты одного элемента по существу параллельны лентам другого элемента. Теперь, если несколько противоположных частей ленты двух элементов, которые опираются друг на друга, приводятся в действие противоположно, ленты могут даже обеспечить модуль ограничения движения. При противоположном приведении в действие частей в одном элементе относительно частей в лентах другого элемента, части ленты одного элемента имеют полюса в одном направлении, например север или юг, и этим частям противостоят противоположные полюсы, то есть соответственно юг или север, частей ленты другого элемента. Таким образом, ленты теперь притягиваются друг к другу. В описанном варианте выполнения, показан режим, в котором оба элемента изменяют полярность своих магнитов и взаимодействуют. В альтернативном режиме работы, один элемент может изменить полярность своих магнитов, в то время как другой элемент оставит магнитные полюса без изменений. Магнитная сила магнитов может быть отрегулирована.
Элементы могут быть снабжены по меньшей мере двумя лентами из магнитных частей 40 на или вблизи одной грани 3 и которые обеспечены по существу в виде креста. По существу, это описано выше в механическом варианте выполнения. Также может быть возможным обеспечить несколько лент на одной грани.
Использование выборочно переключаемых магнитных частей 40 может быть обеспечено даже в следующем варианте выполнения, обеспечивая управление перемещением друг относительно друга двух элементов, которые опираются друг на друга. На фигуре 5C, элемент снабжен двумерной (2D) решеткой из выборочно приводимых в действие магнитных частей 40 или магнитных участков. Магнитные части 40 могут быть встроены в поверхность грани 3 элемента 1, но также могут быть обеспечены ниже поверхности грани 3. Когда элементы 1, 1’ помещаются друг на друга, причем грани 3, 3’ соприкасаются друг с другом, и магнитные части элементов управляемо приводятся в действие, это может обеспечить 2D модуль движения. Когда противоположные магнитные части 40 приводятся в действие противоположно, 2D магнитные части 40, которые обеспечены в виде решетки, обеспечивают модуль ограничения движения. Выборочным приведением в действие магнитных частей 40 в 2D решетке в одном элементе 1 и в противоположном элементе 1, опирающимся на элемент 1, магнитные части 40 в обеих 2D решетках взаимодействуют. Когда противоположные магнитные части имеют полюса в противоположных направлениях, два элемента прикрепляются и притягиваются друг к другу. Когда последующие магнитные части приводятся в действие, осуществляется эффект плоского двигателя. Впоследствии, приведение в действие магнитные части вдоль линии через грань 3 будет перемещать элементы 1 друг относительно друга вдоль этой линии. Фактически, 2D магнитные части таким образом также обеспечивают функционал направления движения. Более быстрое перемещение может быть достигнуто приведением в действие групп магнитных частей 40.
2D решетка из магнитных частей 40 и лента из магнитных частей 40 могут быть объединены.
Магнитные части 40 могут быть обеспечены ниже поверхности с низким коэффициентом трения грани 3. Например, полимерный материал может быть использован. В частности, ПТФЭ или аналогичный полимерный материал с низким коэффициентом трения может быть использован.
Помимо по меньшей мере одной ленты и/или 2D решетки из магнитных частей, по меньшей мере один механический модуль движения, модуль направления движения и/или модуль ограничения движения может быть обеспечен. Например, механический модуль ограничения движения может быть приведен в действие, чтобы по меньшей мере временно зафиксировать положение двух элементов друг относительно друга таким образом, который не требует использования источника энергии.
На фигурах 6A-6D, схематично показан механический вариант выполнения, использующий отдельный модуль 10 движения, модуль 20 направления движения (фиг. 6B в сечении и фигура 6C в дополнительном сечении, как показано на фигуре 6B) и отдельный модуль 30 ограничения движения (фиг. 6D в сечении).
Модуль движения содержит гусеничную ленту в каждом элементе 1, 1'. Здесь гусеничная лента 10 зацепляет гусеничную ленту 10'. В гусеничной ленте 10, один из ведущих колес или элементов продолжается в перпендикулярном направлении или по грани 3, до тех пор пока не зацепит гусеничную ленту 10’. Гусеничная лента может являться одной прямолинейной лентой вдоль грани 3, и альтернативно она является парой пересекающихся гусеничных лент, уложенных как на фигуре 4A.
Здесь модуль 30 ограничения движения является выдвигаемым штифтом 31, который сначала приводится в действие, чтобы продолжаться в паз 32 в противоположном элементе. Когда штифт 31 продолжается в паз 32, он поворачивается вокруг своей продольной оси. Таким образом, кулачок 34, продолжающийся из штифта 31 в поперечном направлении, поворачивается в выточенное отверстие 35’ в пазу 32’. Таким образом кулачок 34 зацепляется в выточенном отверстии 35’. Он удерживает расстояние между элементами 1, 1’. Это удерживает элемент 1 на месте относительно элемента 1’. В варианте выполнения, паз 32’ является желобом, проходящим вдоль грани 3 и имеющим выточенный желоб 35’, таким образом модуль ограничения движения удерживает элементы друг на друге во время перемещения. Оба элемента 1 и 1’ могут имеют части модуля ограничения движения.
Здесь модуль 20 направления движения элемента 1 является простым, прямым штифтом 21, проходящем в желобе 22’ в противоположном элементе 1’. Таким образом, задана траектория вдоль грани 3. В варианте выполнения и для направления движения еще лучше, поперечное сечение штифта 21 является прямоугольным, в частности квадратным. Он помещается в желоб 22’.
На фигурах 7A-7D схематично показан еще один альтернативный вариант выполнения модуля движения, модуля ограничения движения и модуля направления движения. Этот вариант выполнения основан на использование пьезоэлементов для выполнения части упомянутых модулей. «Пьезо» используется для отсылки к элементу, использующему пьезоэлектрический эффект. По существу, существуют принципы, такие как линейные двигатели, которые подходят для применениях в элементах. В этом варианте выполнения, будет описан один тип.
В этом варианте выполнения, обеспечен рельс 80. Более того, здесь обеспечены четыре пьезомодуля 70. Пьезомодули являются выдвижными, на фигуре 7B, сечение, как показано на фигуре 7A, показывает пьезомодуль 70 элемента 1 в убранном положении, и пьезомодуль 70’ в элементе 1’ также в убранном положении. Пьезомодули 70, 70’ имеют два U-образных элемента, которые соединены пьезочастью 72. Когда приводится в действие, длина L изменяется, и расстояние между U-образными элементами также изменяется. Фигура 7C показывает вид сверху пьезомодуля 70, и фигура 7D показывает вид сбоку пьезомодуля 70. Расстояние D между ножками 71 и 71’ таково, что оно насаживается на утолщенную часть 83 рельса 80. Здесь внутренние части ножек 71, 71’, в частности внешние концы, снабжены зажимными пьезоэлементами 73, 73’. Когда приводятся в действие, эти пьезоэлементы 73, 73’ перемещаются внутрь и уменьшают пространство D между ножками 71, 71’. Таким образом, позволяя ножкам 71, 71’ зажимать рельс 80 с боков, в выточенных желобах 82, 82’. Таким образом, когда пьезоэлементы 73, 73’ приводятся в действие, пьезомодули 70, 70’ фиксируются на рельсе 80. Перемещение пьезомодуля 70 по рельсу 80 возможно посредством последующего зажатия U-образных элементов. Если приведение в действие пьезочасти 72 происходит не в фазе с приведением в действие U-образных элементов, перемещение возможно.
Таким образом, здесь пьезомодуль 70, 70’ вместе с рельсом 80 образуют модуль движения, модуль ограничения движения и модуль направления движения.
Альтернативно, модуль движения может быть основан на зацепляющихся элементах, использующих блок, лебедку, рейку и шестерню, цепную передачу, ременную передачу, приводы с жесткой цепью и жестким ремнем, которые все работают на принципе ворота. Поворачивая колесо/ось (например барабан, зубчатое колесо, шкив или вал) прямолинейный элемент (например трос, рейка, цепь или ремень) перемещается. Перемещая прямолинейный элемент, колесо/ось поворачивается. Таким образом, элементы могут быть приведены в движение друг относительно друга.
На фигуре 8 показано схематичное сечение элемента 1, обозначающее различные компоненты, которые могут присутствовать в элементе 1. В этом сечении обозначены четыре грани 3. Элемент 1 содержит устройство 100 обработки данных, устройство 200 передачи данных, энергетическое устройство 300, чувствительное устройство 400, модуль 600 ограничения движения, модуль 500 движения и модуль 700 направления движения. После этих модулей другие модули могут присутствовать: например привод, который может переместить или повернуть убранный модуль движения внутри элемента 1. Устройство 100 обработки данных может быть способно работать вместе с другими устройствами 100 обработки данных других элементов 1 и распределять вычислительные задачи друг другу; Этот может быть выполнено в виде распределенного вычисления или облачного вычисления.
Волнистые стрелки обозначают то, что различные модули и/или устройства могут взаимодействовать с окружающей средой снаружи элемента 1. Например, чувствительное устройство 400 может измерять физические параметры снаружи элемента 1.
Энергетическое устройство 300 может заряжаться от источника снаружи элемента 1. Зарядка может быть беспроводной, например индуктивной, или используя электропроводящие участки поверхности, например.
Устройство 200 передачи данных может передавать данные наружу элемента 1, или быть способно принимать данные снаружи элемента 1. Это может являться данными, переданными другим элементом 1. Это может быть элемент, который соприкасается с элементом 1. Передача данных может быть аналоговой или цифровой, беспроводной посредством электромагнитного спектра, посредством звука или посредством других известных протоколов беспроводной передачи данных, например Zigby, Bluetooth, WIFI, Стандарт ближней радиосвязи (NFC) или подобных. Альтернативно, передача данных может быть физической, используя электропроводящие участки на поверхности грани 3 элемента. Использование датчика, такого как (цифровая) камера, и анализ данных, полученных камерой, также является возможной формой передачи данных; известными примерами являются, например, QR-коды или штриховые коды. Передача может происходить на несколько степеней удаления, даже межпланетно. Энергетическое устройство 300 в этом варианте выполнения обеспечивает энергией компоненты (модули и/или устройства) в элементе 1. Это показано однонаправленными стрелками, идущими от энергетического устройства 300 к другим устройствам и/или модулям. Энергетическое устройство 300 может являться устройством хранения энергии, например заряжаемой батареей, аккумулятором, конденсатором, например конденсатором большой емкости, или подобным. Альтернативно, энергетическое устройство 300 также может быть электрогенератором, который вырабатывает электроэнергию. Примерами такого энергетического устройства 300 являются топливный элемент, двигатель внутреннего сгорания, фотоэлектрический элемент или аналогичное энергетическое устройство 300.
Чувствительное устройство 400 может содержать один или более датчиков, которые способны регистрировать физический параметр. Примерами подходящих датчиков являются датчик температуры, датчик приближения, который регистрирует присутствие и/или расстояние до другого элемента. Датчик давления, датчик атмосферного давления, светочувствительный датчик, датчик положение (GPS), датчик обнаружения перемещения, акселерометр, датчик влажности, гироскоп и подобное. Различные типы датчиков, которые также могут использоваться, также известны в области робототехники.
Примеры возможных модулей движения, модулей ограничения движения и модулей направления движения уже описаны выше. Эти модули, как описано, могут быть основаны на прикладывании механических сил, или быть основаны на электромагнитных силах, химических силах, физических силах, используя например силы «Ван-дер-Ваальса», «силах Казимира», основанных на поверхностных натяжениях, вакууме или воздушном давлении, и подобном.
Устройство 100 обработки данных может например являться компьютером, имеющим различные компоненты, известные в компьютерах, такие как память, арифметический процессор, шины данные и подобное. Устройство 100 обработки данных может быть способно управлять другими частями в элементе 1. Оно может даже управлять по меньшей мере частью по меньшей мере одного другого элемента. Например, в состоянии настройки ведущий-ведомый. Оно также может координировать взаимодействие между элементами 1. Оно может запускать компьютерную программу. Оно может обрабатывать команды, обеспеченные с внешнего источника.
Различные устройства или компоненты на фигуре 8 обозначены схематично. Устройства могут быть встроены в элемент. В варианте выполнения, одно или более устройств могут по меньшей мере частично быть встроены в грань элемента. Более того, в варианте выполнения, одно или более устройств могут по меньшей мере частично быть встроены в один компонент. Альтернативно, по меньшей мере часть функционала устройств 100-700 может быть встроена в виде компьютерной программы.
На фигурах 9A-9K показан вариант выполнения элементов 1 в сборе (обозначены «a»-«e»), содержащих общий модуль 90 движения. В показанном варианте выполнения, элементы не имеют одинаковые формы или размеры. Преимущество общего модуля движения является то, что элементы в сборе могут изменять форму с использованием ограниченного количества относительно сложных модулей 90 движения. На фигуре 9A, элемент «a» снабжен общим модулем 90 движения. В варианте выполнения, общий модуль 90 движения временно назначен к элементу «a». Это может быть выполнено управляющей структурой для назначения общего модуля движения и для управления общим модулем 90 движения. Альтернативно, общий модуль 90 движения управляется элементом, который использует общий модуль движения. В еще одном варианте выполнения, общий модуль движения является самоуправляемым, или может являться частью одноранговой сети вместе с элементами, и даже дополнительными общими модулями движения. Выше обозначенные формы или режимы работы могут быть объединены, или элементы в сборе и один или более общих модулей движения могут переключаться с одного режима работы на другой. Таким образом, обработка и работа модуля движения может приводиться в действие и управляться из общего модуля 90 движения. Альтернативно (и на другом конце спектра), работа и управление общим модулем 90 движения 90 осуществляется в элементе 1. Работа и обработка также могут быть распределены. Используя например настройки ведущий-ведомый, управление может переключаться с элемента 1 на общий модуль 90 движения и наоборот. Также, управление общим модулем движения также может переключаться с одного элемента 1 на другой элемент 1.
В текущем варианте выполнения, общий модуль 90 движения содержит крепежные части 91, которые зацепляют элемент «a». Общий модуль 90 движения изображен на фигуре 9A в его рабочем положении. Здесь крепежная часть 91 зацепляет элемент «a» таким образом, что общий модуль 90 движения не может сместиться относительно элемента «a». В этом рабочем положении общий модуль 90 движения может быть дополнительно приведен в действие, чтобы зацепить смежный элемент, чтобы начать перемещение элемента «a» относительно такого смежного, в частности примыкающего, элемента. Здесь такой элемент не изображен. Общий модуль 90 движения расположен в направляющей 11, такой как, например, направляющей 11, изображенной на фигуре 4A. На фигуре 9B, крепежная часть 91 втягивается в общий модуль 90 движения. Таким образом, общий модуль 90 движения освобождается для перемещения вдоль направляющей 11 элемента «a». Чтобы фактически переместиться вдоль направляющей 11 элемента «a», общий модуль 90 движения может быть снабжен смещаемой частью 92. В варианте выполнения, смещаемая часть 92 зацепляется в направляющую 11 элемента «a». Смещаемая часть 92 может являться механическим компонентом, физически зацепляющим направляющую 11. Например, смещаемая часть 92 может содержать ведомое колесо, аналогичное например модулю движения с фигур 4A-4L, пьезоэлемент, изображенный выше, в модуле движения в элементе и например аналогичный показанным вариантам выполнения на фигурах 6A-7D. Смещаемая часть 92 также может содержать магнитные части, которые могут быть приведены в действие. Направляющая может быть снабжена частями, которые реагируют на магнитные силы, но которые сами не являются постоянно магнитными, например железные участки. Таким образом, возможно обеспечить магнитный привод, в то время как элементы сами по себе не являются постоянно магнитными.
На фигурах 9B-9G, изображено как смещаемая часть 92 вызывает перемещение общего модуля 90 движения вдоль направляющих 11 различных элементов («a», «c», «d»), чтобы прибыть к элементу 1, который обозначен «e». Переходя от фигуры 9C к 9D, модуль движения следует направляющей 11, даже если направляющая 11 сворачивает за угол. Переходя от фигуры 9E к фигуре 9F, модуль 90 движения покидает элемент «a» и продолжает свое движение в направляющей 11 элемента «d». Переходя от ситуации на фигуре 9F к 9G, модуль 90 движения сначала следует по направляющей 11 элемента «d» и переходит в направляющую 11 элемента «e». Здесь эти направляющие 11 соединены друг с другом, и для модуля 90 движения имеется одна непрерывная направляющая 11.
На фигуре 9H изображено, что общий модуль 90 движения приводит в действие свои крепежные части 91, чтобы зацепить элемент «e». Таким образом, положение общего модуля 90 движения на элементе «e» закрепляется или фиксируется посредством крепежной части(-ей) 91. Здесь крепежные части 91 изображены с одной стороны общего модуля 90 движения. Из фигур 9A и 9H ясно, что крепежные части 91 могут зацеплять модуль 90 движения с различных сторон. Здесь показано с двух сторон. В варианте выполнения, крепежные части 91 предназначены для обеспечения зацепления всех сторон модуля 90 движения. Альтернативно, крепежные часть 91 не включены в сам модуль 90 движения, а могут являться частью модуля движения, которая встроена в элемент. Например, крепежная часть 91 может быть выполнена вдоль линии модуля ограничения движения, показанного на фигурах 6A-6D. Фактически, может быть даже возможным обеспечить часть, которая обеспечивает выполнение функции модуля ограничения движения, и в качестве крепежной части для модуля 90 движения.
На фигуре 9H смещаемая часть 92 не обозначена, для того чтобы показать, что она больше не функциональна с этого этапа.
В варианте выполнения, таком как например показанном на фигуре 7A, элемент 1 содержит два пересекающихся модуля 11 направления движения, причем каждый модуль 11 направления движения проходит вокруг элемента 1. В таком варианте выполнения, два типа общих модулей движения могут быть заданы, один тип модуля движения для первого модуля 11 направления движения, и другой для второго модуля 11 направления движения. Эти типы модулей 90 движения и модулей 11 направления движения могут быть идентичны, но ориентированы по-разному.
На фигуре 9I показано как часть 93 смещения элемента приводится в действие в ее рабочее положение. Часть 93 смещения элемента продолжается из общего модуля 90 движения и из элемента «e» в модуль направления движения, здесь направляющую 11, элемента «b». Вновь, часть 93 смещения элемента может быть аналогична типам, изображенным на фигурах 4A-7D, то есть, основана на механической работе, такой как колесо, зубчатое колесо или подобное, элементы, приводимые в действие/управляемые магнитно, или например пьезоэлементы. Часть 93 смещения элемента теперь зацепляет направляющую 11 элемента «b». Она начинает прикладывать силу к элементу «b» посредством зацепления направляющей 11. Следовательно, элемент «d» смещается относительно элемента «b». Фигура 9J показывает это. Далее, в варианте выполнения, показанном на фигуре 9K, общий модуль 90 движения хранится в пространстве для хранения в элементе, здесь элементе «d». Таким образом, направляющие 11 свободны, и общий модуль 90 движения может находиться в положении для зарядки, или для защиты от воздействий окружающей среды.
В варианте выполнения, смещаемая часть 92 и часть 93 смещения элемента могут функционально быть объединены.
На фигурах 10A-10H схематично показана другая идея элемента 1 с модулем 10 движения. В этой идеи, которая может быть объединена с предыдущими идеями, элемент 1 имеет по меньшей мере один модуль 10 движения и часть 95 перемещения модуля движения, обеспечивающую смещение или изменение ориентации модуля 10 движения в элементе 1. Таким образом, количество модулей 10 движения в элементе 1 может быть значительно снижено. В варианте выполнения, элемент 1 содержит один модуль 10 движения, который содержит часть 95 перемещения модуля движения, которая обеспечивает смещение и изменение положения модуля движения, чтобы иметь рабочее положение на каждой грани 3. Таким образом, только одного модуля 10 движения может быть достаточно при смещении элемента 1 относительно другого элемента 1. Фактически, более одного модуля 10 движения может быть включено в элемент 1. На фигурах 10A и 10B показан вариант выполнения такого модуля 10 движения, который содержит часть 95 перемещения модуля движения, которая позволяет вращение модуля 10 движения внутри элемента 1. Таким образом, модуль 1 движения, который находится в рабочем положении на грани 3, позволяет зацепление примыкающего элемента (не показан), который опирается на поверхность грани 3. На фигуре 10B, модуль 10 движения повернут вокруг оси R вращения в рабочее положение на смежной грани 3 элемента 1.
На фигурах 10C-10H показан альтернативный вариант выполнения для модуля 10 движения с альтернативной частью 96 перемещения модуля движения. В этом варианте выполнения, модуль 10 движения перемещается параллельно модулю 11 направления движения. Он находится внутри модуля 11 направления движения. Модуль 10 движения в этом варианте выполнения содержит часть 96 перемещения модуля движения, которая позволяет смещение модуля 10 движения, как показано на последующих фигурах 10C-10G. Модуль 10 движения перемещается или смещается из его положения на фигуре 10C в его положение на фигуре 10D параллельно модулю 11 направления движения, здесь направляющей 11. Здесь модуль 10 движения смещается внутри элемента 1. Здесь модуль 10 движения перемещается или смещается между центральной точкой элемента и направляющей 11, оставляя направляющую 11 свободной. Модуль движения может быть приведен в действие посредством прикладывания механической силы. Примеры приведены выше. Альтернативно, электромагнитная сила может быть использована. Пример этого также приведен выше. Таким образом, элемент может содержать всего один модуль 10 движения, уменьшая сложность элемента. Может быть возможным оснащение элемента 1 несколькими модулями движения.
На фигуре 10F модуль 10 движения перемещается, чтобы прийти в его рабочее положение. В этом варианте выполнения, модуль движения имеет рабочее положение. В других вариантах выполнения, модуль движения может быть предназначен для перемещения в более чем одной ориентации.
На фигуре 10G модуль 10 движения 10 находится в его новом рабочем положении на смежной грани 3. Здесь модуль 10 движения может быть зафиксирован в его положении в элементе 1. На фигуре 10H, схематично, модуль 10 движения освободил часть 93 смещения элемента. В этом варианте выполнения, она может содержать ведомое колесо, аналогично варианту выполнения с фигур 4A-4L. Другой элемент 93 смещение части также может быть возможен, например пьезоэлемент, описанный выше, или магнитные части, описанные ранее. Этот вариант выполнения может значительно упростить элементы 1, поскольку они могут содержать всего один модуль 10 движения в элементе 1. Модуль движения может содержать часть функциональных частей элементов. В одном утрированном примере, модуль 10 движения содержит все функциональные части (фигура 8) элемента 1.
Вариант выполнения с фигур 10A-10H может быть объединен с вариантом выполнения с фигур 9A-9K. Например, элемент может содержать один или более выполненных с возможностью внутреннего смещения модулей 10 движения, в комбинации с одним или более общих модулей движения в объекте. В другом варианте выполнения, модуль движения может быть как внутренним модулем движения, так и он может выполнять функцию общего модуля 10 движения.
Фигура 11 показывает схематично дополнительный или альтернативный вариант выполнения элемента 1. В этом варианте выполнения, рука 51 готова захватить элемент 1, для того чтобы сместить его. В этом варианте выполнения, элемент 1 может иметь один или более описанных признаков или их комбинацию. Альтернативно, он может содержать только датчик для обнаружения захвата и средство крепления. На фигуре 11, схематично показан вариант выполнения элемента с модулем 10 движения, модуль 20 направления движения и модуль 30 ограничения движения показаны схематично. В этом схематичном обозначении, показан механический вариант выполнения, который может быть аналогичен варианту выполнения с фигур 4, или варианту выполнения с фигур 9 или фигур 10. Элемент 1 этого варианта выполнения может являться строительным блоком и в этом варианте выполнения имеет форму куба, хотя, как уже описано ранее, другие формы также могут быть рассмотрены. Фактически, также может быть возможным использовать набор форм, таких как различные кубики в устаревших коробках с кубиками, используемых в качестве детской игрушки.
Элемент 1 с фигуры 11 по существу может быть захвачен, поставлен и уложен аналогично кубикам из набора кубиков, или аналогично широко известному Lego®. Элемент 1 в этом вариант выполнения содержит набор датчиков 400 для обнаружения захвата. Эти датчики 400 могут например являться датчиками приближения, датчиками тепла или камерами, или их комбинациями, и составлять чувствительное средство. Более того, чувствительное средство может содержать один или более контроллеров, один или более процессоров данных, включая в себя процессоры изображения. Средство для интерпретации измеренных параметров может являться частью чувствительного средства. На фигуре 8, обеспечен пример того, как чувствительное средство может быть функционально присоединено. В варианте выполнения, обеспечивающем легкое обнаружение захвата, датчик 400 содержит камеры, например камеры, которые обеспечены на каждой грани 3 элемента 1. Таким образом, может быть возможным регистрировать, например, приближение руки 51 к элементу 1.
Элемент 1 дополнительно содержит средство 50 крепления. В этом варианте выполнения, элемент 1 имеет набор удерживающих модулей 50. Здесь, удерживающие модули обеспечены на каждой грани 3. Таким образом, элемент 1 может быть зафиксирован грань к грани с другим, аналогичным элементом. Примером может служить, например, фиксация, описанная на фигуре 3F. Более конкретно, в этом варианте выполнения, каждая грань 3 содержит поднабор, здесь из четырех, удерживающих модулей 50. Здесь, удерживающие модули 50 обеспечены на каждом квадранте грани 3. Таким образом, элемент 1 может быть зафиксирован на другом, аналогичном элементе с одним квадрантом на другом квадранте, позволяя гибкое возведение кубиков или блоков. Более того, перевязки, описанные ранее, могут быть реализованы таким образом.
Датчики 400 могут быть функционально соединены с процессором 100 данных (не показан). Таким образом, входной сигнал по меньшей мере двух датчиков на различных гранях 3 может быть объединен в более гибкое обнаружение захвата. Например, при помощи камеры на каждой грани 3, имеющих углы обзора, которые например по меньшей мере сшиваются, может быть возможно иметь круговое обнаружение захвата. Фактически, при обнаружении сближения руки или пальцев на двух различных гранях, предвосхищение и предвидение захвата элемента 1 может быть улучшено. В такой настройке, каждая камера может иметь угол обзора более 45°. В частности, угол обзора каждой камеры может составлять более 90°. Таким образом, круговой обзор может быть легко обеспечен при помощи камеры на каждой поверхности куба уже на расстоянии около 8 см или менее. Одна или более поверхностей элемента может быть изогнута. В связи с этим, рассматривается выпуклый изгиб. Наиболее утрированные примеры включают в себя сферу и цилиндр. Сфера, в связи с этим, имеет одну изогнутую поверхность. Цилиндр, в частности круглый цилиндр с круглыми гранями-плоскостями, имеет три грани. В таких формах, например, меньшее количество камер может потребоваться для обнаружения захвата. Например, обнаружение захвата на расстоянии от около 5 см.
Используя процессор данных, например процессор 100 данных, обработка изображений с камеры может быть выполнена, и интерпретация изображений, используя известные процедуры интерпретации изображений.
Более того, удерживающие модули 50 также могут быть функционально соединены с процессором 100 данных. Таким образом, обнаружение захвата одним или более датчиками 400 может быть объединен и соединен с фиксирующим и/или расфиксирующим действием одного или более удерживающих модулей 50. Элемент 1 также может при обнаружении захвата связываться с одним или более аналогичными элементами, которые зафиксированы к элементу 1, и запрашивать расфиксацию или запрашивать фиксацию, в зависимости от его текущего состояния.
В варианте выполнения, обеспечено предвидение элементом 1 своего захвата или предвидение своего освобождения из захвата: Когда один или более датчиков 400 регистрируют руку 51, приближающуюся к элементу 1 для захвата элемента 1, удерживающие модули 50 могут расфиксироваться. Это позволяет руке захватить элемент 1 и фактически поднять его и убрать его с других элементов. Наоборот, когда элемент 1 удерживается рукой 51 и помещается на один или более аналогичных элементов с одним или более функционально совмещенными удерживающими модулями, один или более удерживающих модулей могут, в предвидении, начать фиксацию. В связи с этим, удерживающие модули противоположных граней функционально совмещены, когда удерживающие модули выполнены с возможностью прикладывания фиксирующей силы друг к другу. Приводимые в действие механически удерживающие модули противоположных граней, например, могут иметь автоматический поиск или автоматическое подключение. Например, вход удерживающего модуля может быть коническим для направления вставляемого конца по направлению к центру.
Удерживающие модули 50 обеспечивают прикладывание сил к и/или прием сил от одного или более удерживающих модулей или других, аналогичных элементов. В частности, удерживающие модули 50 обеспечивают силу с компонентом, перпендикулярным грани 3 и направленным к грани 3. Таким образом, используя один или более удерживающий модули 50, элемент 1 может быть зафиксирован гранью к одному или более других, аналогичных элементов. Приложенная сила может быть например магнитной, электрической, механической.
В варианте выполнения, удерживающие модули являются механическими частями, которые обеспечивают прикладывание механических сил. Например, каждый удерживающий модуль 50 может содержать гусеничный конец, который может быть протяженным и быть принят в другой, аналогичный удерживающий модуль. Такой гусеничный конец может, например, быть полым. Это может обеспечить управление совмещением, или передачу сигнала от одного элемента к другому. Альтернативно, удерживающий модуль 50 может содержать зацепляющую часть, которая может быть зацеплена в (и освобождена из) принимающей часть. В варианте выполнения, удерживающий модуль 50 может являться мужским, женским, бесполым или может являться «обоеполым». Это может позволить удерживающему модулю 50 фиксироваться в другой удерживающий модуль, или быть зафиксированным другим удерживающим модулем.
В описанном варианте выполнения, один или более датчиков 400 функционально соединены с одним или более удерживающими модулями 50. Это позволяет удерживающим модулям 50 реагировать на измерения датчиков, такие как обнаружение захвата. Таким образом, например, элемент 1 может расфиксироваться до того как рука 51 фактически коснется его, позволяя захват и смещение элемента 1. Это может также или в сочетании позволить фиксироваться элементу 1 к одному или более других, аналогичных элементов, даже до его отпускания рукой 51. Это дает элементу 1 ощущение «чувствительности». В варианте выполнения, не требуется прикладывание сил к фиксирующим элементам, и не потребуется дополнительное действие для удаления одного или более элементов.
В варианте выполнения, элемент 1 содержит несущую конструкцию (не показана), удерживающую датчики 400 и поддерживающую удерживающие модули 50. Более того, такая несущая конструкция может обеспечивать опору или ограничивать грань. Минимум она может обеспечить три опоры, ограничивающие грань. Она также может обеспечить или поддерживать поверхность, ограничивающую грань 3. Несущая конструкция может быть выполнена из любого материала, такого как полимер, армированный полимер, металл, их комбинации и подобного. Специалисту будут понятны подходящие материалы. Несущая конструкция может быть изготовлена, используя любой тип или способ производства, включая в себя 3D печать.
Чувствительное средство, в частности камера, имеет поле зрения. В таком поле зрения, один или более конусов обнаружения могут быть заданы. В варианте выполнения с фигуры 11, две камеры могут содержать первый конус обнаружения и второй конус обнаружения. В процессе обнаружения захвата могут использоваться конусы обнаружения, которые раскрываются в по существу противоположных направлениях. Альтернативно или в сочетании, конусы обнаружения могут имеют оси, которые расположены под углом по меньшей мере 90 градусов. Более того, средство крепления выполнено с возможностью обеспечения удерживающей силы, причем компонент удерживающей силы направлен к и перпендикулярно соединяющей линии этих конусов обнаружения.
Оси двух конусов обнаружения датчика, используемого для обнаружения захвата, могут ограничивать плоскость. При обнаружении захвата, средство крепления, которое приводится в действие, выполнено с возможностью прикладывания силы, имеющей компонент, перпендикулярный этой плоскости. Сила часто направлена к элементу.
В варианте выполнения, первый и второй конус обнаружения содержат соединяющую линию, и средство крепления выполнено с возможностью обеспечения удерживающей силы, имеющей компонент, направленный к и перпендикулярно соединяющей линии.
В варианте выполнения, чувствительное средство кроме того выполнено с возможностью обнаружения совмещения средства крепления со средством крепления аналогичного элемента. Чувствительное средство может обеспечивать меру расстояния от фактического совмещения противоположных средств крепления.
Элементы могут иметь различную форму и/или быть различного типа. Чувствительное средство может быть выполнено с возможностью определения типа и/или формы другого элемента. Чувствительное средство может быть выполнено с возможностью измерения или определения близости другого элемента. В случае элемента согласно фигуре 11, и с чувствительным средством, содержащим камеру на каждой грани, имеющую угол обзора, позволяющий раскрытие конуса обнаружения от грани, например имеющего ось, перпендикулярную грани, упомянутые параметры могут быть определены.
Также ясно, что вышеприведенное описание и чертежи включены для иллюстрации некоторых вариантов выполнения изобретения, и не ограничивают объем защиты. Начиная с этого описания, намного больше вариантов выполнения будут очевидны специалистам. Эти варианты выполнения лежат в пределах объема защиты и сущности этого изобретения и являются очевидными комбинациями технологий предшествующего уровня техники и описания этого патента.
Ссылочные позиции
1 элемент
2 центр элемента
3 грань элемента
10 модуль движения
11 модуль движения: направляющая часть
12 подвижная крышка
14 модуль направления/ограничения движения
15 модуль направления/ограничения движения
20 модуль направления движения
21 прямой штифт
22 желоб
30 модуль ограничения движения
31 штифт
32 паз
34 кулачок
35 выточенное отверстие в пазе 32
50 удерживающие модули
51 рука
70 пьезомодуль
71 ножка
72 пьезочасть
73 пьезоэлемент
80 рельс
82 выточенный желоб
90 (общий) модуль движения
91 Крепежная часть(-и)
92 часть смещения
93 часть смещения элемента
95 часть перемещения модуля движения
96 часть перемещения модуля движения
100 устройство обработки данных
200 устройство передачи данных
300 энергетическое устройство
400 чувствительное устройство
500 модуль движения
600 устройство ограничения движения
700 модуль направления движения
Реферат
Изобретение обеспечивает систему, содержащую по меньшей мере первый, второй и третий элементы, и модуль движения, причем упомянутые элементы являются трехмерными и каждый элемент содержит центральную точку в упомянутом элементе, по меньшей мере один торец, соединенный с упомянутой центральной точкой, и причем упомянутый торец содержит модуль направления движения, определяющий траекторию по меньшей мере по части упомянутого торца, и модуль ограничения движения, выполненный с возможностью ограничения смещения упомянутой центральной точки относительно упомянутой центральной точки одного из других элементов по меньшей мере по одной траектории, выбранной из группы, состоящей из упомянутой траектории и упомянутой траектории упомянутого другого элемента, при взаимодействии с упомянутым модулем движения. 6 н. и 33 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Игрушка-конструктор с функциональными блоками
Комментарии